
作業車両
【課題】駆動輪を回転させる回転動力を発生するモータを有する作業車両において、スリップの発生を未然に防止することができるようにする。
【解決手段】作業車両400において、駆動輪40を回転させる回転動力を発生するモータ480と、前記モータ480の回転数を設定する速度設定手段(50)と、前記モータ480の回転数が、前記速度設定手段(50)により設定された回転数となるまで所定の変化率で変化するように前記モータ480の回転数を制御する制御装置460と、前記所定の変化率を設定する変化率設定手段462を具備し、前記制御装置460は、前記変化率設定手段462による設定に基づいて前記所定の変化率を調節する構成とした。
【解決手段】作業車両400において、駆動輪40を回転させる回転動力を発生するモータ480と、前記モータ480の回転数を設定する速度設定手段(50)と、前記モータ480の回転数が、前記速度設定手段(50)により設定された回転数となるまで所定の変化率で変化するように前記モータ480の回転数を制御する制御装置460と、前記所定の変化率を設定する変化率設定手段462を具備し、前記制御装置460は、前記変化率設定手段462による設定に基づいて前記所定の変化率を調節する構成とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駆動輪を回転させる回転動力を発生するモータを有する作業車両において、スリップを未然に防止するための技術に関する。
【背景技術】
【0002】
従来、車軸の回転数を回転センサにより検出し、当該検出に基づいてスリップが発生しているか否かを判断し、スリップが発生した場合にはスリップを抑制するための制御を行う作業車両の技術は公知となっている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−218974号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、前記作業車両において、スリップが発生しているか否かを瞬時に、かつ正確に判断するためには、高分解能を有する回転センサが必要であった。当該回転センサは一般的に高額であり、部品コストが増加してしまう点で不利であった。
【0005】
また、発生したスリップを抑制する方法として、前記作業車両が有する油圧式無段変速装置(以下、単に「HST」と記す)に圧力調整弁を備え、前記HSTの閉回路油路内の圧力を下げる方法がある。このように構成することにより、前記作業車両の車軸の回転数、ひいては駆動輪の回転数を減少させ、グリップ力を増加させることにより、スリップを抑制することができる。
【0006】
しかし、前記作業車両においては、前記HSTの閉回路油路内の圧力を逃がしてしまうことにより、前記HSTにおいて大きなエネルギ損失が発生する点や、前記エネルギ損失に伴って油温が上昇する点で不利であった。
【0007】
すなわち、一旦発生したスリップを抑制するための制御を行う構成とした作業車両は、部品コストの増加やエネルギ損失の発生等を伴う点で不利であった。
【0008】
本発明は、上記の如き課題を鑑みてなされたものであり、駆動輪を回転させる回転動力を発生するモータを有する作業車両において、スリップの発生を未然に防止することができるようにすることを目的とする。
【課題を解決するための手段】
【0009】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0010】
請求項1においては、駆動輪を回転させる回転動力を発生するモータと、前記モータの回転数を設定する速度設定手段と、前記モータの回転数が、前記速度設定手段により設定された回転数となるまで所定の変化率で変化するように前記モータの回転数を制御する制御装置と、を具備する作業車両である。
【0011】
請求項2においては、前記所定の変化率を設定する変化率設定手段を具備し、前記制御装置は、前記変化率設定手段による設定に基づいて前記所定の変化率を調節するものである。
【0012】
請求項3においては、車体の傾斜角度を検出する傾斜角度検出手段を具備し、前記制御装置は、前記傾斜角度検出手段により検出される車体の傾斜角度に基づいて前記所定の変化率を調節するものである。
【発明の効果】
【0013】
本発明の効果として、以下に示すような効果を奏する。
請求項1においては、駆動輪を回転させる回転動力を発生するモータと、前記モータの回転数を設定する速度設定手段と、前記モータの回転数が、前記速度設定手段により設定された回転数となるまで所定の変化率で変化するように前記モータの回転数を制御する制御装置と、を具備する作業車両であるので、作業車両の加速度を制限し、加速時及び減速時のスリップの発生を未然に防止することができる。
また、前記作業車両の発進時や停止時等の急激な速度変化(ショック)の発生を防止し、乗り心地の向上を図ることができる。
また、モータの回転数を制御することにより駆動する構成の作業車両に、容易に適用するできるため、部品コストの増加を防止することが出来るのである。
【0014】
請求項2においては、前記所定の変化率を設定する変化率設定手段を具備し、前記制御装置は、前記変化率設定手段による設定に基づいて前記所定の変化率を調節するので、路面の状態等に合わせて、所定の変化率を所望の値に調節することができる。
また、作業車両の乗り心地を、オペレータにとって最適な乗り心地に調節することができる。
【0015】
請求項3においては、車体の傾斜角度を検出する傾斜角度検出手段を具備し、前記制御装置は、前記傾斜角度検出手段により検出される車体の傾斜角度に基づいて前記所定の変化率を調節するので、坂道等を走行する場合に、所定の変化率を坂道の傾斜角度に基づいた変化率に調節することができる。
これによって、傾斜角度に合わせて最適な制御を行うことができる。
【図面の簡単な説明】
【0016】
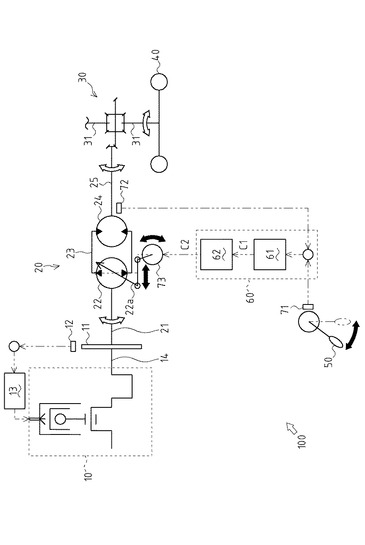
【図1】作業車両100の構成を示す模式図。
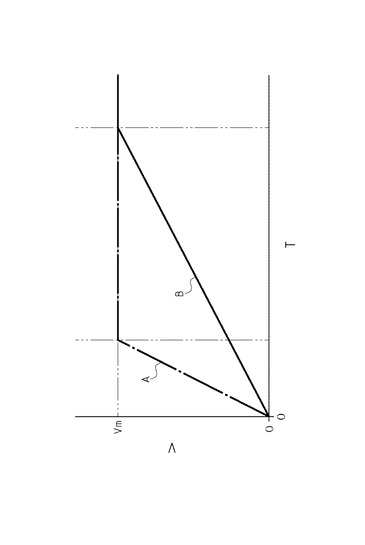
【図2】同じく作業車両100の駆動輪の回転数の変化を示す図。
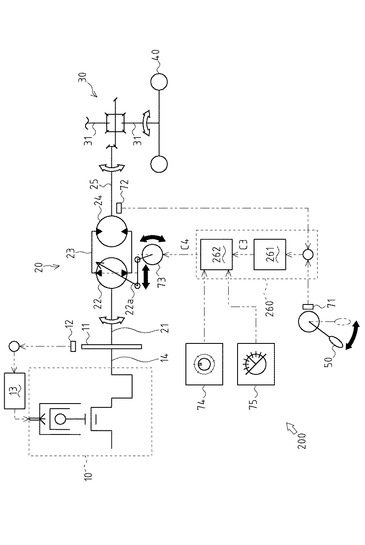
【図3】作業車両200の構成を示す模式図。
【図4】作業車両300の構成を示す模式図。
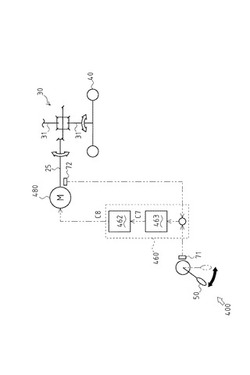
【図5】作業車両400の構成を示す模式図。
【図6】作業車両500の構成を示す模式図。
【図7】作業車両500の構成を示す模式図。
【発明を実施するための形態】
【0017】
次に、図1及び図2を用いて、作業車両100について説明する。
【0018】
図1に示すように、作業車両100は、主としてエンジン10、油圧式無段変速装置(以下、単に「HST」と記す)20、差動装置30、駆動輪40、変速レバー50、制御装置60等を具備する。
【0019】
エンジン10は、作業車両100が駆動するための回転動力を発生するものである。エンジン10は、主としてフライホイール11、回転数センサ12、エンジン制御装置13等を具備する。
【0020】
フライホイール11は、慣性力を蓄えることによりエンジン10を滑らかに回転させるものである。フライホイール11は、エンジン10が有するクランク軸14の一端に連動連結される。エンジン10の回転動力は、クランク軸14を介してフライホイール11に伝達される。フライホイール11は、クランク軸14により伝達される回転動力により回転する。
【0021】
回転数センサ12は、フライホイール11の回転数を検出するものである。回転数センサ12は、磁気ピックアップ式のセンサや、ロータリーエンコーダ等により構成される。
【0022】
エンジン制御装置13は、エンジン10の回転数の制御を行うものである。エンジン制御装置13は、回転数センサ12に接続される。エンジン制御装置13は、回転数センサ12により検出されるフライホイール11の回転数に基づいて、エンジン10の回転数の制御を行う。
【0023】
HST20は、エンジン10が発生する回転動力を変速するものである。HST20は、主としてポンプ入力軸21、可変容量型の油圧ポンプ22、閉回路油路23、固定容量型の油圧モータ24、モータ出力軸25等を具備する。
【0024】
但し、油圧モータ24を可変容量型として、油圧モータ24の可動斜板、または、油圧ポンプ22及び油圧モータ24の両方の可動斜板を、後述するように制御する構成とすることも可能である。また、本形態では油圧式無段変速装置としているが、ベルト式無段変速装置やトロイダル式無段変速装置等で構成することも可能であり、操作手段で無段変速できるものであれば限定するものではない。
【0025】
ポンプ入力軸21は、フライホイール11の回転動力を伝達するものである。ポンプ入力軸21の一端は、フライホイール11に連動連結される。
【0026】
油圧ポンプ22は、作動油を吐出するものである。油圧ポンプ22には、ポンプ入力軸21の他端が連動連結される。フライホイール11の回転動力は、ポンプ入力軸21を介して油圧ポンプ22に伝達される。油圧ポンプ22は、ポンプ入力軸21により伝達される回転動力により回転し、作動油を吐出する。
【0027】
油圧ポンプ22は、可動斜板22aを具備する。可動斜板22aの傾斜角度を調整することにより、作動油の吐出量及び吐出方向を変更することができる。
【0028】
閉回路油路23は、油圧ポンプ22によって吐出された作動油を案内するものである。閉回路油路23は、油圧ポンプ22に連通接続される。
【0029】
油圧モータ24は、圧送される作動油により回動するものである。油圧モータ24は、閉回路油路23に連通接続される。閉回路油路23によって案内される作動油により、油圧モータ24は回転する。すなわち、油圧ポンプ22の回転動力は、閉回路油路23を経て圧送される作動油を介して油圧モータ24に伝達される。
【0030】
モータ出力軸25は、油圧モータ24の回転動力を伝達するものである。モータ出力軸25の一端は、油圧モータ24に連動連結される。
【0031】
差動装置30は、回転動力を分配するものである。差動装置30には、モータ出力軸25の他端が連動連結される。油圧モータ24の回転動力は、モータ出力軸25を介して差動装置30に伝達される。当該伝達される回転動力は、差動装置30により左右に分配される。
【0032】
差動装置30の左右には、車軸31・31の一端がそれぞれ連動連結される。車軸31・31は、差動装置30により分配された回転動力を伝達する。
【0033】
駆動輪40は、伝達される回転動力により駆動される車輪である。駆動輪40には、車軸31の他端が連動連結される。差動装置30の回転動力は、車軸31を介して駆動輪40に伝達される。駆動輪40は、車軸31により伝達される回転動力により回転する。
なお、本形態において差動装置30は、伝達される回転動力を左右に分配するものとしたが、説明の便宜上、左右いずれか一側の駆動輪40の図示及び説明は省略する。
【0034】
変速レバー50は、HST20により変速された後の回転動力の回転数、すなわちモータ出力軸25の回転数を設定するものである。以下、変速レバー50によって設定されるモータ出力軸25の回転数を、単に「設定回転数」と記す。
【0035】
オペレータにより変速レバー50が回動操作されることにより、モータ出力軸25の回転数が設定される。変速レバー50は、作業車両100の運転座席付近等の、オペレータが操作可能な位置に具備される。
【0036】
制御装置60は、HST20の可動斜板22aの傾斜角度を制御するものである。制御装置60は、主としてレバー回動角検出センサ71、出力軸回転数センサ72、アクチュエータ73等に接続される。
【0037】
レバー回動角検出センサ71は、変速レバー50の回動角、ひいては前記設定回転数を検出するものである。
【0038】
出力軸回転数センサ72は、モータ出力軸25の実際の回転数(以下、単に「実回転数」と記す)を検出するものである。出力軸回転数センサ72は、磁気ピックアップ式のセンサや、ロータリーエンコーダ等により構成される。なお、本形態において、出力軸回転数センサ72は、モータ出力軸25の回転数を検出する回転センサとしたが、可動斜板22aの傾斜角度を検出する角度センサ等で構成することも可能であり、実回転数と比例する物理量を検出できるものであれば限定するものではない。
【0039】
アクチュエータ73は、可動斜板22aの傾斜角度を変更するものである。アクチュエータ73は、サーボモータ等により構成される。アクチュエータ73は、可動斜板22aと連動連結される。アクチュエータ73が動作することによって、可動斜板22aの傾斜角度が調節される。
【0040】
制御装置60は、レバー回動角検出センサ71に接続され、レバー回動角検出センサ71による前記設定回転数の検出信号を取得することが可能である。制御装置60は、出力軸回転数センサ72に接続され、出力軸回転数センサ72による実回転数の検出信号を取得することが可能である。制御装置60は、アクチュエータ73に接続され、アクチュエータ73の動作を制御することが可能である。
【0041】
制御装置60は、具体的にはCPU、ROM、RAM、HDD等がバスで接続される構成であってもよく、あるいはワンチップのLSI等からなる構成であってもよい。制御装置60には、アクチュエータ73の動作を制御するための種々のプログラム及びデータが格納され、当該プログラム及びデータに基づいてアクチュエータ73の動作を制御する。制御装置60がアクチュエータ73の動作を制御することにより、可動斜板22aの傾斜角度が調整される。可動斜板22aの傾斜角度が調整されることにより、油圧ポンプ22による作動油の吐出量及び吐出方向が調整される。油圧ポンプ22による作動油の吐出量及び吐出方向が調整されることにより、油圧モータ24の回転数及び回転方向が調整される。油圧モータ24の回転数及び回転方向が調整されることにより、モータ出力軸25の回転数及び回転方向が調整される。
【0042】
ここで、作業車両100のスリップを防止するために必要な制御について説明する。
摩擦係数をμ、作業車両100の質量をm、重力加速度をgとすると、作業車両100のトラクション力Ftは、以下の式1により表される。
Ft=μ・m・g ・・・(1)
作業車両100の加速度をαとすると、作業車両100を加速度αで加速するのに必要な加速力Faは、以下の式2により表される。
Fa=m・α ・・・(2)
加速力Faがトラクション力Ftを超える加速を行った場合、スリップが発生する。言い換えると、以下の式3に示すように、加速力Faがトラクション力Ft以下である場合、スリップは発生しない。
m・α≦μ・m・g ・・・(3)
式3を書き換えると、以下の式4により表される。
α≦μ・g ・・・(4)
すなわち、加速度αがμ・g以下である場合、スリップは発生しない。
【0043】
また、可動斜板22aの傾斜角度は、モータ出力軸25の回転数に比例する。すなわち、可動斜板22aの傾斜角度の変化率は、モータ出力軸25の回転数の変化率、ひいては作業車両100の加速度αに比例する。つまり、加速度αがμ・g以下となるように、可動斜板22aの傾斜角度の変化率を制御することで、スリップの発生を防止することができる。
【0044】
以下では、制御装置60によるアクチュエータ73の動作の制御態様について説明する。図1に示すように、制御装置60は、アクチュエータ73の動作を制御するための制御手段として、可動斜板角制御手段61及び変化率制限手段62を具備する。
【0045】
可動斜板角制御手段61は、入力されるレバー回動角検出センサ71及び出力軸回転数センサ72の検出信号に基づいて、モータ出力軸25を前記設定回転数で回転させるために必要なアクチュエータ73の動作量Xを算出し、アクチュエータ73を当該動作量Xだけ動作させる制御信号C1を出力する。
【0046】
変化率制限手段62は、入力される制御信号C1に基づいて、アクチュエータ73を動作量Xだけ所定の変化率βで動作させる制御信号C2を出力する。ここで、所定の変化率βは、加速度α≦μ・gとなる値に、すなわち、スリップの発生を防止することができる値に定められる。なお、本形態において、摩擦係数μの値は、実験や数値計算等に基づいて予め定められ、制御装置60に記憶される。
【0047】
アクチュエータ73は、制御信号C2に従い、動作量Xまで所定の変化率βで動作する。これによって、モータ出力軸25の回転数は、前記設定回転数に向かって所定の変化率βで変化し、ひいては駆動輪40の回転数Vが変化率βで変化する。
【0048】
以下では、図2を用いて、本形態の如く構成された作業車両100が、停止状態からある一定速度で走行を開始する際の駆動輪40の回転数Vの時間変化について説明する。図2に示すグラフの横軸は変速レバー50の操作開始時からの経過時間T、縦軸は回転数Vを示す。なお、変速レバー50は、経過時間Tが0の時点で、設定回転数が0の位置から所定の位置(図2においては、駆動輪40の回転数VがVmとなる位置)まで瞬時に操作されたものとする。
【0049】
変化率制限手段62による制御がない場合における回転数Vの変化の一例を、一点鎖線Aで示す。T=0において変速レバー50が操作されると、回転数VはVmまで急激に上昇する。これにより、加速力Faがトラクション力Ftを超え、スリップが発生する場合がある。
【0050】
本形態の如く構成された場合における回転数Vの変化の一例を、実線Bで示す。T=0において変速レバー50が操作されると、回転数VはVmまで所定の変化率βで上昇する。これにより、加速力Faをトラクション力Ft以下に抑制することが可能となり、ひいては、スリップの発生を防止することができる。
【0051】
以上の如く、作業車両100は、回転動力を発生するエンジン10と、油圧ポンプ22及び油圧モータ24を有し、エンジン10が発生する回転動力を変速して駆動輪40へ伝達するHST20と、油圧ポンプ22の可動斜板22aの傾斜角度を変更することによりHST20の変速比を調節するアクチュエータ73と、HST20により変速された後のモータ出力軸25の回転数を設定する変速レバー(速度設定手段)50と、HST20により変速された後のモータ出力軸25の回転数が、変速レバー50により設定された回転数(設定回転数)となるまで所定の変化率βで変化するようにアクチュエータ73の動作を制御する制御装置60と、を具備するものである。このように構成することにより、作業車両100の加速度αを制限し、加速時及び減速時のスリップの発生を未然に防止することができる。また、作業車両100の発進時や停止時等の急激な速度変化(ショック)の発生を防止し、乗り心地の向上を図ることができる。また、可動斜板22aをアクチュエータ73により調節する構成とすることにより、変速レバー50の操作力を低減することができる。また、可動斜板22aの傾斜角度が電子制御されている作業車両に、容易に適用することができるため、部品コストの増加を防止することができる。
【0052】
また、作業車両100は、回転動力を発生するエンジン10と、油圧ポンプ22及び油圧モータ24を有し、エンジン10が発生する回転動力を変速して駆動輪40へ伝達するHST20と、油圧ポンプ22の可動斜板22aの傾斜角度を変更することによりHST20の変速比を調節するアクチュエータ73と、HST20により変速された後のモータ出力軸25の回転数を設定する変速レバー(速度設定手段)50と、変速レバー50により設定される回転数(設定回転数)に基づいてアクチュエータ73の動作を制御する制御装置60と、を具備する作業車両100であって、制御装置60は、HST20により変速された後のモータ出力軸25の回転数が、前記設定回転数となるようにアクチュエータ73の動作を制御する可動斜板角制御手段61と、可動斜板角制御手段61によって制御されるアクチュエータ73が、所定の変化率βで動作するように制御する変化率制限手段62と、を具備するものである。このように構成することにより、作業車両100の加速度αを制限し、加速時及び減速時のスリップの発生を未然に防止することができる。また、作業車両100の発進時や停止時等の急激な速度変化(ショック)の発生を防止し、乗り心地の向上を図ることができる。また、可動斜板22aをアクチュエータ73により調節する構成とすることにより、変速レバー50の操作力を低減することができる。また、可動斜板22aの傾斜角度が電子制御されている作業車両に、容易に適用することができるため、部品コストの増加を防止することができる。また、アクチュエータ73の動作の変化率を制御することにより、設定回転数に対するアクチュエータ73の動作の追従性が悪い制御システムにおいても、正確に駆動輪40の回転数Vの変化率を制御することができる。
【0053】
以下では、図3を用いて、作業車両200について説明する。なお、前述の作業車両100(図1参照)と略同一の構成の部材には同一の符号を付し、説明を省略する。
【0054】
作業車両200が作業車両100と異なる点は、制御装置60に代えて、制御装置260、設定器74、傾斜センサ75を具備する点である。制御装置260は、設定器74、傾斜センサ75等に接続される。
【0055】
設定器74は、摩擦係数μの値を設定することによって、所定の変化率βを設定するものである。設定器74は、ポテンショメータを用いたダイヤル設定器や、回動操作されることにより調節可能なダイヤル式のスイッチ等で構成される。設定器74は、摩擦係数μの値を設定することができる構成であれば、限定するものではない。設定器74は、作業車両200の運転座席付近等の、オペレータが操作可能な位置に具備される。
【0056】
傾斜センサ75は、作業車両200の車体の傾斜角度θを検出するものである。傾斜センサ75は、作業車両200に具備される。
【0057】
ここで、作業車両200の傾斜角度θを考慮した場合の、作業車両200のスリップを防止するために必要な制御について説明する。作業車両200の傾斜角度θを考慮すると、式1は、以下の式5のように書き換えられる。
Ft=μ・m・g・cosθ ・・・(5)
式5に従って、式3及び式4は、以下の式6及び式7のように書き換えられる。
m・α≦μ・m・g・cosθ ・・・(6)
α≦μ・g・cosθ ・・・(7)
すなわち、加速度αがμ・g・cosθ以下である場合、スリップは発生しない。つまり、加速度αがμ・g・cosθ以下となるように、可動斜板22aの傾斜角度の変化率を制御することで、スリップの発生を防止することができる。
【0058】
制御装置260は、設定器74に接続され、設定器74により設定される摩擦係数μの検出信号を取得することが可能である。制御装置260は、傾斜センサ75に接続され、傾斜センサ75による作業車両200の傾斜角度θの検出信号を取得することが可能である。
【0059】
以下では、制御装置260によるアクチュエータ73の動作の制御態様について説明する。図3に示すように、制御装置260は、アクチュエータ73の動作を制御するための制御手段として、可動斜板角制御手段261及び変化率制限手段262を具備する。可動斜板角制御手段261は、入力されるレバー回動角検出センサ71及び出力軸回転数センサ72の検出信号に基づいて、モータ出力軸25を前記設定回転数で回転させるために必要なアクチュエータ73の動作量Xを算出し、アクチュエータ73を当該動作量Xだけ動作させる制御信号C3を出力する。
【0060】
変化率制限手段262は、入力される制御信号C3に基づいて、アクチュエータ73を動作量Xだけ所定の変化率βで動作させる制御信号C4を出力する。ここで、所定の変化率βは、変化率制限手段262によって、加速度αがμ・g・cosθ以下となる値に定められる。摩擦係数μの値は、設定器74の検出信号に基づいて設定される。傾斜角度θの値は、傾斜センサ75の検出信号に基づいて設定される。すなわち、オペレータは、設定器74を用いてμの値を設定することにより、路面の状態等に合わせて、所定の変化率βを所望の値に調節することが可能となる。
【0061】
アクチュエータ73は、制御信号C4に従い、動作量Xだけ所定の変化率βで動作する。これによって、モータ出力軸25の回転数は、前記設定回転数に向かって所定の変化率βで変化し、ひいては駆動輪40の回転数Vが変化率βで変化する。
【0062】
以上の如く、作業車両200は、所定の変化率βを設定する設定器(変化率設定手段)74を具備し、制御装置260は、設定器74による設定に基づいて所定の変化率βを調節するものである。このように構成することにより、路面の状態等に合わせて、アクチュエータ73の動作の変化率を所望の値に調節することができる。これによって、作業車両200の乗り心地を、オペレータにとって最適な乗り心地に調節することができる。
【0063】
また、作業車両200は、車体の傾斜角度を検出する傾斜センサ(傾斜角度検出手段)75を具備し、制御装置260は、傾斜センサ75により検出される車体の傾斜角度に基づいて所定の変化率βを調節するものである。このように構成することにより、坂道等を走行する場合に、アクチュエータ73の変化率を坂道の傾斜角度に基づいた変化率に調節することができる。これによって、傾斜角度に合わせて最適な制御を行うことができる。
【0064】
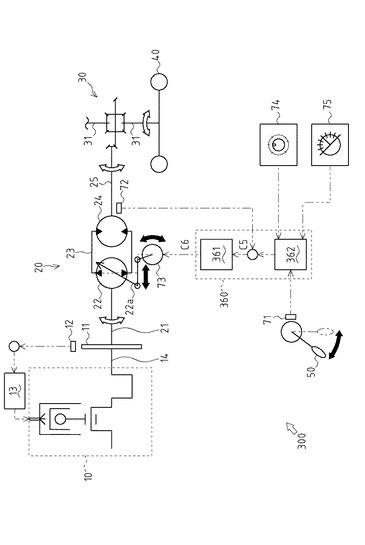
以下では、図4を用いて、作業車両300について説明する。なお、前述の作業車両200(図3参照)と略同一の構成の部材には同一の符号を付し、説明を省略する。
【0065】
作業車両300が作業車両200と異なる点は、制御装置260に代えて、制御装置360を具備する点である。
【0066】
制御装置360によるアクチュエータ73の動作の制御態様について説明する。図4に示すように、制御装置360は、アクチュエータ73の動作を制御するための制御手段として、可動斜板角制御手段361及び変化率制限手段362を具備する。変化率制限手段362は、目標回転数の値を、前記設定回転数の値となるまで所定の変化率βで変化させるとともに、当該目標回転数の値を制御信号C5によって出力する。ここで、所定の変化率βは、変化率制限手段362によって、加速度αがμ・g・cosθ以下となる値に定められる。摩擦係数μの値は、設定器74の検出信号に基づいて設定される。傾斜角度θの値は、傾斜センサ75の検出信号に基づいて設定される。
【0067】
可動斜板角制御手段361は、制御信号C5によって入力される前記目標回転数、及び出力軸回転数センサ72の検出信号に基づいて、モータ出力軸25を当該目標回転数で回転させるために必要なアクチュエータ73の動作量Xを算出し、アクチュエータ73を当該動作量Xだけ動作させる制御信号C6を出力する。可動斜板角制御手段361に入力される前記目標回転数の値は、前記設定回転数まで所定の変化率βで変化するため、これに伴い、制御信号C6によって出力するアクチュエータ73の動作量Xも、前記設定回転数に対応する動作量まで所定の変化率βで変化する。
【0068】
アクチュエータ73は、制御信号C6に従い、動作量Xだけ動作する。アクチュエータ73に入力される動作量Xの値は、前記設定回転数に対応する動作量まで所定の変化率βで変化するため、これに伴い、アクチュエータ73も所定の変化率βで動作する。
【0069】
本形態の如く構成することによって、モータ出力軸25の回転数は、前記設定回転数に向かって所定の変化率βで変化し、ひいては駆動輪40の回転数Vが変化率βで変化する。
【0070】
以上の如く、作業車両300は、回転動力を発生するエンジン10と、油圧ポンプ22及び油圧モータ24を有し、エンジン10が発生する回転動力を変速して駆動輪40へ伝達するHST20と、油圧ポンプ22の可動斜板22aの傾斜角度を変更することによりHST20の変速比を調節するアクチュエータ73と、HST20により変速された後のモータ出力軸25の回転数を設定する変速レバー(速度設定手段)50と、変速レバー50により設定される回転数(設定回転数)に基づいてアクチュエータ73の動作を制御する制御装置360と、を具備する作業車両100であって、制御装置360は、目標回転数を、変速レバー50により設定された回転数となるまで所定の変化率βで変化させる変化率制限手段362と、HST20により変速された後のモータ出力軸25の回転数が、前記目標回転数となるようにアクチュエータ73の動作を制御する可動斜板角制御手段361と、を具備するものである。このように構成することにより、作業車両300の加速度αを制限し、加速時及び減速時のスリップの発生を未然に防止することができる。また、作業車両300の発進時や停止時等の急激な速度変化(ショック)の発生を防止し、乗り心地の向上を図ることができる。また、可動斜板22aをアクチュエータ73により調節する構成とすることにより、変速レバー50の操作力を低減することができる。
【0071】
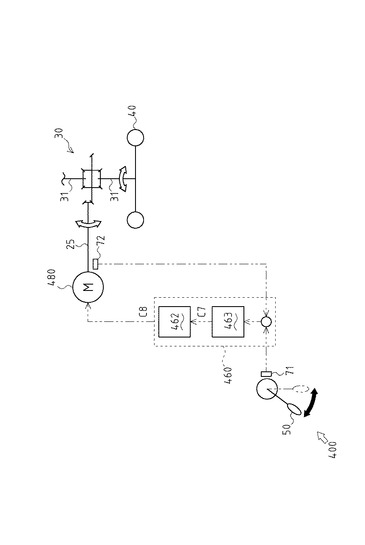
以下では、図5を用いて、作業車両400について説明する。なお、前述の作業車両100(図1参照)と略同一の構成の部材には同一の符号を付し、説明を省略する。
【0072】
作業車両400は、モータ480が発生する回転動力により駆動するものである。作業車両400が作業車両100と異なる点は、エンジン10、HST20、アクチュエータ73、及び制御装置60に代えて、モータ480、制御装置460を具備する点である。
【0073】
モータ480は、駆動輪40を回転させる回転動力を発生するものである。モータ480には、モータ出力軸25の一端が連動連結される。
【0074】
制御装置460は、モータ480の回転数を制御するものである。制御装置460は、主としてレバー回動角検出センサ71、出力軸回転数センサ72、モータ480等に接続される。
【0075】
以下では、制御装置460によるモータ480の回転数の制御態様について説明する。制御装置460は、モータ480の回転数を制御するための制御手段として、回転数制御手段463及び変化率制限手段462を具備する。
【0076】
回転数制御手段463は、入力されるレバー回動角検出センサ71及び出力軸回転数センサ72の検出信号に基づいて、モータ480を前記設定回転数で回転させる制御信号C7を出力する。
【0077】
変化率制限手段462は、入力される制御信号C7に基づいて、モータ480の回転数を前記設定回転数まで所定の変化率βで変化させる制御信号C8を出力する。ここで、所定の変化率βは、変化率制限手段462によって、加速度αがμ・g以下となる値に、すなわち、スリップの発生を防止することができる値に定められる。なお、本形態において、摩擦係数μの値は、実験や数値計算等に基づいて定められ、制御装置460に記憶される。
【0078】
モータ480は、制御信号C8に従い、回転数を前記設定回転数まで所定の変化率βで変化させる。これによって、モータ出力軸25の回転数は、前記設定回転数に向かって所定の変化率βで変化し、ひいては駆動輪40の回転数Vが所定の変化率βで変化する。
【0079】
以上の如く、作業車両400は、駆動輪40を回転させる回転動力を発生するモータ480と、モータ480の回転数を設定する変速レバー(速度設定手段)50と、モータ480の回転数が、変速レバー50により設定された回転数となるまで所定の変化率βで変化するようにモータ480の回転数を制御する制御装置460と、を具備するものである。このように構成することにより、作業車両400の加速度αを制限し、加速時及び減速時のスリップの発生を未然に防止することができる。また、作業車両400の発進時や停止時等の急激な速度変化(ショック)の発生を防止し、乗り心地の向上を図ることができる。また、モータ480により駆動する構成としたことによって、変速レバー50の操作力を低減することができる。また、モータ480の回転数を制御することにより駆動する構成の作業車両に、容易に適用することができるため、部品コストの増加を防止することができる。
【0080】
なお、制御装置460に、設定器74及び傾斜センサ75を接続する構成とすることも可能である。このように構成した場合、変化率制限手段462は、所定の変化率βの値を、加速度αがμ・g・cosθ以下となるように定める。摩擦係数μの値は、設定器74の検出信号に基づいて設定される。傾斜角度θの値は、傾斜センサ75の検出信号に基づいて設定される。
【0081】
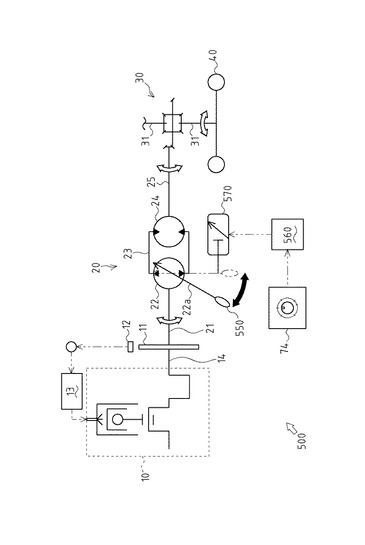
以下では、図6を用いて、作業車両500について説明する。なお、前述の作業車両200(図3参照)と略同一の構成の部材には同一の符号を付し、説明を省略する。
【0082】
作業車両500は、作業車両200の如く、可動斜板22aを電子制御するものではない。作業車両500が作業車両200と異なる点は、変速レバー50、レバー回動角検出センサ71、出力軸回転数センサ72、アクチュエータ73、傾斜センサ75、及び制御装置260に代えて、変速レバー550、制御装置560、及び減衰力調整式ダンパ(以下、単に「可変ダンパ」と記す)570を具備する点である。なお、本形態において、減衰力設定手段は、設定器74及び制御装置560により構成される。
【0083】
作業車両500は、可動斜板22aの傾斜角度を変速レバー550により直接調整するよう構成される。変速レバー550には、可変ダンパ570が具備される。可変ダンパ570は、減衰力を所望の値、または予め設定される複数種類の値に変更可能に構成されたダンパである。可変ダンパ570は、電磁弁等でオリフィスの断面積を変化させるものや、作動流体として磁性流体を用い、当該磁性流体の粘度をコイルによって変化させるもの等により構成される。
【0084】
変速レバー550に可変ダンパ570を具備することにより、オペレータによる変速レバー550の操作の変化率が、所定の変化率に制限される。当該変化率は、可変ダンパ570の減衰力に基づいて決定される。
【0085】
制御装置560は、可変ダンパ570の減衰力を調節するものである。制御装置560は、設定器74に接続され、設定器74により設定される摩擦係数μの検出信号を取得することが可能である。制御装置560は、可変ダンパ570に接続され、可変ダンパ570の減衰力を制御することが可能である。
【0086】
以下では、制御装置560による可変ダンパ570の減衰力の制御態様について説明する。制御装置560は、設定器74の検出信号に基づいて、可変ダンパ570の減衰力を調整する。例えば、路面の状態が、濡れている等のスリップが発生し易い状態の場合、オペレータは、設定器74により摩擦係数μの値を小さい値に設定する。制御装置560は、摩擦係数μが小さい値に設定されると、可変ダンパ570の減衰力を当該摩擦係数μに対応する値まで高くする。この場合の減衰力は、加速度αがμ・g以下となるような値に設定される。これによって、変速レバー550の操作の変化率が制限され、スリップの発生を防止することができる。
【0087】
また、路面の状態が、スリップが発生し難い状態の場合、オペレータは、設定器74により摩擦係数μの値を大きい値に設定する。制御装置560は、摩擦係数μが大きい値に設定されると、可変ダンパ570の減衰力を当該摩擦係数μに対応する値まで低くする。この場合の減衰力も、加速度αがμ・g以下となるような値に設定される。これによって、変速レバー550の操作の変化率が制限され、スリップの発生を防止することができる。
【0088】
以上の如く、作業車両500は、回転動力を発生するエンジン10と、油圧ポンプ22及び油圧モータ24を有し、エンジン10が発生する回転動力を変速して駆動輪40へ伝達するHST20と、油圧ポンプ22の可動斜板22aの傾斜角度を変更することによりHST20の変速比を調節する変速レバー(速度設定手段)550と、変速レバー550の変化率を所定の変化率βに制限する可変ダンパ(減衰力調整式ダンパ)570と、可変ダンパ570の減衰力を調節することにより、所定の変化率βを設定する設定器74及び制御装置560(減衰力設定手段)と、を具備するものである。このように構成することにより、作業車両500の加速度αを制限し、加速時及び減速時のスリップの発生を未然に防止することができる。また、作業車両500の発進時や停止時等の急激な速度変化(ショック)の発生を防止し、乗り心地の向上を図ることができる。また、路面の状態等に合わせて、可動斜板22aの動作の変化率を所望の値に調節することができる。これによって、作業車両500の乗り心地を、オペレータ自身にとって最適な乗り心地に調節することができる。また、本形態の如く構成した制御システムであれば、変速装置に電子制御システムを適用していない作業車両であっても、容易にスリップ防止のための制御を行うことができる。
【0089】
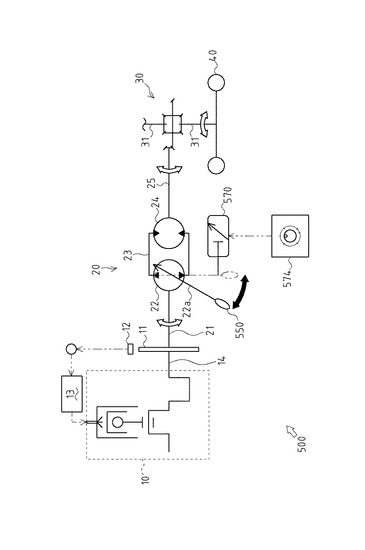
なお、可変ダンパ570の減衰力を、制御装置560により調節する構成としたが、これに限るものではない。例えば、図7に示すように、制御装置560による電子制御を用いず、設定器574(減衰力設定手段)により設定される摩擦係数μの値に応じて、可変ダンパ570が備える可変オリフィスの開度を機械的に調節する構成とすることも可能である。
【符号の説明】
【0090】
10 エンジン
20 HST(油圧式無段変速装置)
25 モータ出力軸(出力軸)
50 変速レバー(速度設定手段)
60 制御装置
61 可動斜板角制御手段
62 変化率制限手段
74 設定器(変化率設定手段)
75 傾斜センサ(傾斜角度検出手段)
100 作業車両
480 モータ
570 可変ダンパ(減衰力調整式ダンパ)
【技術分野】
【0001】
本発明は、駆動輪を回転させる回転動力を発生するモータを有する作業車両において、スリップを未然に防止するための技術に関する。
【背景技術】
【0002】
従来、車軸の回転数を回転センサにより検出し、当該検出に基づいてスリップが発生しているか否かを判断し、スリップが発生した場合にはスリップを抑制するための制御を行う作業車両の技術は公知となっている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−218974号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、前記作業車両において、スリップが発生しているか否かを瞬時に、かつ正確に判断するためには、高分解能を有する回転センサが必要であった。当該回転センサは一般的に高額であり、部品コストが増加してしまう点で不利であった。
【0005】
また、発生したスリップを抑制する方法として、前記作業車両が有する油圧式無段変速装置(以下、単に「HST」と記す)に圧力調整弁を備え、前記HSTの閉回路油路内の圧力を下げる方法がある。このように構成することにより、前記作業車両の車軸の回転数、ひいては駆動輪の回転数を減少させ、グリップ力を増加させることにより、スリップを抑制することができる。
【0006】
しかし、前記作業車両においては、前記HSTの閉回路油路内の圧力を逃がしてしまうことにより、前記HSTにおいて大きなエネルギ損失が発生する点や、前記エネルギ損失に伴って油温が上昇する点で不利であった。
【0007】
すなわち、一旦発生したスリップを抑制するための制御を行う構成とした作業車両は、部品コストの増加やエネルギ損失の発生等を伴う点で不利であった。
【0008】
本発明は、上記の如き課題を鑑みてなされたものであり、駆動輪を回転させる回転動力を発生するモータを有する作業車両において、スリップの発生を未然に防止することができるようにすることを目的とする。
【課題を解決するための手段】
【0009】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0010】
請求項1においては、駆動輪を回転させる回転動力を発生するモータと、前記モータの回転数を設定する速度設定手段と、前記モータの回転数が、前記速度設定手段により設定された回転数となるまで所定の変化率で変化するように前記モータの回転数を制御する制御装置と、を具備する作業車両である。
【0011】
請求項2においては、前記所定の変化率を設定する変化率設定手段を具備し、前記制御装置は、前記変化率設定手段による設定に基づいて前記所定の変化率を調節するものである。
【0012】
請求項3においては、車体の傾斜角度を検出する傾斜角度検出手段を具備し、前記制御装置は、前記傾斜角度検出手段により検出される車体の傾斜角度に基づいて前記所定の変化率を調節するものである。
【発明の効果】
【0013】
本発明の効果として、以下に示すような効果を奏する。
請求項1においては、駆動輪を回転させる回転動力を発生するモータと、前記モータの回転数を設定する速度設定手段と、前記モータの回転数が、前記速度設定手段により設定された回転数となるまで所定の変化率で変化するように前記モータの回転数を制御する制御装置と、を具備する作業車両であるので、作業車両の加速度を制限し、加速時及び減速時のスリップの発生を未然に防止することができる。
また、前記作業車両の発進時や停止時等の急激な速度変化(ショック)の発生を防止し、乗り心地の向上を図ることができる。
また、モータの回転数を制御することにより駆動する構成の作業車両に、容易に適用するできるため、部品コストの増加を防止することが出来るのである。
【0014】
請求項2においては、前記所定の変化率を設定する変化率設定手段を具備し、前記制御装置は、前記変化率設定手段による設定に基づいて前記所定の変化率を調節するので、路面の状態等に合わせて、所定の変化率を所望の値に調節することができる。
また、作業車両の乗り心地を、オペレータにとって最適な乗り心地に調節することができる。
【0015】
請求項3においては、車体の傾斜角度を検出する傾斜角度検出手段を具備し、前記制御装置は、前記傾斜角度検出手段により検出される車体の傾斜角度に基づいて前記所定の変化率を調節するので、坂道等を走行する場合に、所定の変化率を坂道の傾斜角度に基づいた変化率に調節することができる。
これによって、傾斜角度に合わせて最適な制御を行うことができる。
【図面の簡単な説明】
【0016】
【図1】作業車両100の構成を示す模式図。
【図2】同じく作業車両100の駆動輪の回転数の変化を示す図。
【図3】作業車両200の構成を示す模式図。
【図4】作業車両300の構成を示す模式図。
【図5】作業車両400の構成を示す模式図。
【図6】作業車両500の構成を示す模式図。
【図7】作業車両500の構成を示す模式図。
【発明を実施するための形態】
【0017】
次に、図1及び図2を用いて、作業車両100について説明する。
【0018】
図1に示すように、作業車両100は、主としてエンジン10、油圧式無段変速装置(以下、単に「HST」と記す)20、差動装置30、駆動輪40、変速レバー50、制御装置60等を具備する。
【0019】
エンジン10は、作業車両100が駆動するための回転動力を発生するものである。エンジン10は、主としてフライホイール11、回転数センサ12、エンジン制御装置13等を具備する。
【0020】
フライホイール11は、慣性力を蓄えることによりエンジン10を滑らかに回転させるものである。フライホイール11は、エンジン10が有するクランク軸14の一端に連動連結される。エンジン10の回転動力は、クランク軸14を介してフライホイール11に伝達される。フライホイール11は、クランク軸14により伝達される回転動力により回転する。
【0021】
回転数センサ12は、フライホイール11の回転数を検出するものである。回転数センサ12は、磁気ピックアップ式のセンサや、ロータリーエンコーダ等により構成される。
【0022】
エンジン制御装置13は、エンジン10の回転数の制御を行うものである。エンジン制御装置13は、回転数センサ12に接続される。エンジン制御装置13は、回転数センサ12により検出されるフライホイール11の回転数に基づいて、エンジン10の回転数の制御を行う。
【0023】
HST20は、エンジン10が発生する回転動力を変速するものである。HST20は、主としてポンプ入力軸21、可変容量型の油圧ポンプ22、閉回路油路23、固定容量型の油圧モータ24、モータ出力軸25等を具備する。
【0024】
但し、油圧モータ24を可変容量型として、油圧モータ24の可動斜板、または、油圧ポンプ22及び油圧モータ24の両方の可動斜板を、後述するように制御する構成とすることも可能である。また、本形態では油圧式無段変速装置としているが、ベルト式無段変速装置やトロイダル式無段変速装置等で構成することも可能であり、操作手段で無段変速できるものであれば限定するものではない。
【0025】
ポンプ入力軸21は、フライホイール11の回転動力を伝達するものである。ポンプ入力軸21の一端は、フライホイール11に連動連結される。
【0026】
油圧ポンプ22は、作動油を吐出するものである。油圧ポンプ22には、ポンプ入力軸21の他端が連動連結される。フライホイール11の回転動力は、ポンプ入力軸21を介して油圧ポンプ22に伝達される。油圧ポンプ22は、ポンプ入力軸21により伝達される回転動力により回転し、作動油を吐出する。
【0027】
油圧ポンプ22は、可動斜板22aを具備する。可動斜板22aの傾斜角度を調整することにより、作動油の吐出量及び吐出方向を変更することができる。
【0028】
閉回路油路23は、油圧ポンプ22によって吐出された作動油を案内するものである。閉回路油路23は、油圧ポンプ22に連通接続される。
【0029】
油圧モータ24は、圧送される作動油により回動するものである。油圧モータ24は、閉回路油路23に連通接続される。閉回路油路23によって案内される作動油により、油圧モータ24は回転する。すなわち、油圧ポンプ22の回転動力は、閉回路油路23を経て圧送される作動油を介して油圧モータ24に伝達される。
【0030】
モータ出力軸25は、油圧モータ24の回転動力を伝達するものである。モータ出力軸25の一端は、油圧モータ24に連動連結される。
【0031】
差動装置30は、回転動力を分配するものである。差動装置30には、モータ出力軸25の他端が連動連結される。油圧モータ24の回転動力は、モータ出力軸25を介して差動装置30に伝達される。当該伝達される回転動力は、差動装置30により左右に分配される。
【0032】
差動装置30の左右には、車軸31・31の一端がそれぞれ連動連結される。車軸31・31は、差動装置30により分配された回転動力を伝達する。
【0033】
駆動輪40は、伝達される回転動力により駆動される車輪である。駆動輪40には、車軸31の他端が連動連結される。差動装置30の回転動力は、車軸31を介して駆動輪40に伝達される。駆動輪40は、車軸31により伝達される回転動力により回転する。
なお、本形態において差動装置30は、伝達される回転動力を左右に分配するものとしたが、説明の便宜上、左右いずれか一側の駆動輪40の図示及び説明は省略する。
【0034】
変速レバー50は、HST20により変速された後の回転動力の回転数、すなわちモータ出力軸25の回転数を設定するものである。以下、変速レバー50によって設定されるモータ出力軸25の回転数を、単に「設定回転数」と記す。
【0035】
オペレータにより変速レバー50が回動操作されることにより、モータ出力軸25の回転数が設定される。変速レバー50は、作業車両100の運転座席付近等の、オペレータが操作可能な位置に具備される。
【0036】
制御装置60は、HST20の可動斜板22aの傾斜角度を制御するものである。制御装置60は、主としてレバー回動角検出センサ71、出力軸回転数センサ72、アクチュエータ73等に接続される。
【0037】
レバー回動角検出センサ71は、変速レバー50の回動角、ひいては前記設定回転数を検出するものである。
【0038】
出力軸回転数センサ72は、モータ出力軸25の実際の回転数(以下、単に「実回転数」と記す)を検出するものである。出力軸回転数センサ72は、磁気ピックアップ式のセンサや、ロータリーエンコーダ等により構成される。なお、本形態において、出力軸回転数センサ72は、モータ出力軸25の回転数を検出する回転センサとしたが、可動斜板22aの傾斜角度を検出する角度センサ等で構成することも可能であり、実回転数と比例する物理量を検出できるものであれば限定するものではない。
【0039】
アクチュエータ73は、可動斜板22aの傾斜角度を変更するものである。アクチュエータ73は、サーボモータ等により構成される。アクチュエータ73は、可動斜板22aと連動連結される。アクチュエータ73が動作することによって、可動斜板22aの傾斜角度が調節される。
【0040】
制御装置60は、レバー回動角検出センサ71に接続され、レバー回動角検出センサ71による前記設定回転数の検出信号を取得することが可能である。制御装置60は、出力軸回転数センサ72に接続され、出力軸回転数センサ72による実回転数の検出信号を取得することが可能である。制御装置60は、アクチュエータ73に接続され、アクチュエータ73の動作を制御することが可能である。
【0041】
制御装置60は、具体的にはCPU、ROM、RAM、HDD等がバスで接続される構成であってもよく、あるいはワンチップのLSI等からなる構成であってもよい。制御装置60には、アクチュエータ73の動作を制御するための種々のプログラム及びデータが格納され、当該プログラム及びデータに基づいてアクチュエータ73の動作を制御する。制御装置60がアクチュエータ73の動作を制御することにより、可動斜板22aの傾斜角度が調整される。可動斜板22aの傾斜角度が調整されることにより、油圧ポンプ22による作動油の吐出量及び吐出方向が調整される。油圧ポンプ22による作動油の吐出量及び吐出方向が調整されることにより、油圧モータ24の回転数及び回転方向が調整される。油圧モータ24の回転数及び回転方向が調整されることにより、モータ出力軸25の回転数及び回転方向が調整される。
【0042】
ここで、作業車両100のスリップを防止するために必要な制御について説明する。
摩擦係数をμ、作業車両100の質量をm、重力加速度をgとすると、作業車両100のトラクション力Ftは、以下の式1により表される。
Ft=μ・m・g ・・・(1)
作業車両100の加速度をαとすると、作業車両100を加速度αで加速するのに必要な加速力Faは、以下の式2により表される。
Fa=m・α ・・・(2)
加速力Faがトラクション力Ftを超える加速を行った場合、スリップが発生する。言い換えると、以下の式3に示すように、加速力Faがトラクション力Ft以下である場合、スリップは発生しない。
m・α≦μ・m・g ・・・(3)
式3を書き換えると、以下の式4により表される。
α≦μ・g ・・・(4)
すなわち、加速度αがμ・g以下である場合、スリップは発生しない。
【0043】
また、可動斜板22aの傾斜角度は、モータ出力軸25の回転数に比例する。すなわち、可動斜板22aの傾斜角度の変化率は、モータ出力軸25の回転数の変化率、ひいては作業車両100の加速度αに比例する。つまり、加速度αがμ・g以下となるように、可動斜板22aの傾斜角度の変化率を制御することで、スリップの発生を防止することができる。
【0044】
以下では、制御装置60によるアクチュエータ73の動作の制御態様について説明する。図1に示すように、制御装置60は、アクチュエータ73の動作を制御するための制御手段として、可動斜板角制御手段61及び変化率制限手段62を具備する。
【0045】
可動斜板角制御手段61は、入力されるレバー回動角検出センサ71及び出力軸回転数センサ72の検出信号に基づいて、モータ出力軸25を前記設定回転数で回転させるために必要なアクチュエータ73の動作量Xを算出し、アクチュエータ73を当該動作量Xだけ動作させる制御信号C1を出力する。
【0046】
変化率制限手段62は、入力される制御信号C1に基づいて、アクチュエータ73を動作量Xだけ所定の変化率βで動作させる制御信号C2を出力する。ここで、所定の変化率βは、加速度α≦μ・gとなる値に、すなわち、スリップの発生を防止することができる値に定められる。なお、本形態において、摩擦係数μの値は、実験や数値計算等に基づいて予め定められ、制御装置60に記憶される。
【0047】
アクチュエータ73は、制御信号C2に従い、動作量Xまで所定の変化率βで動作する。これによって、モータ出力軸25の回転数は、前記設定回転数に向かって所定の変化率βで変化し、ひいては駆動輪40の回転数Vが変化率βで変化する。
【0048】
以下では、図2を用いて、本形態の如く構成された作業車両100が、停止状態からある一定速度で走行を開始する際の駆動輪40の回転数Vの時間変化について説明する。図2に示すグラフの横軸は変速レバー50の操作開始時からの経過時間T、縦軸は回転数Vを示す。なお、変速レバー50は、経過時間Tが0の時点で、設定回転数が0の位置から所定の位置(図2においては、駆動輪40の回転数VがVmとなる位置)まで瞬時に操作されたものとする。
【0049】
変化率制限手段62による制御がない場合における回転数Vの変化の一例を、一点鎖線Aで示す。T=0において変速レバー50が操作されると、回転数VはVmまで急激に上昇する。これにより、加速力Faがトラクション力Ftを超え、スリップが発生する場合がある。
【0050】
本形態の如く構成された場合における回転数Vの変化の一例を、実線Bで示す。T=0において変速レバー50が操作されると、回転数VはVmまで所定の変化率βで上昇する。これにより、加速力Faをトラクション力Ft以下に抑制することが可能となり、ひいては、スリップの発生を防止することができる。
【0051】
以上の如く、作業車両100は、回転動力を発生するエンジン10と、油圧ポンプ22及び油圧モータ24を有し、エンジン10が発生する回転動力を変速して駆動輪40へ伝達するHST20と、油圧ポンプ22の可動斜板22aの傾斜角度を変更することによりHST20の変速比を調節するアクチュエータ73と、HST20により変速された後のモータ出力軸25の回転数を設定する変速レバー(速度設定手段)50と、HST20により変速された後のモータ出力軸25の回転数が、変速レバー50により設定された回転数(設定回転数)となるまで所定の変化率βで変化するようにアクチュエータ73の動作を制御する制御装置60と、を具備するものである。このように構成することにより、作業車両100の加速度αを制限し、加速時及び減速時のスリップの発生を未然に防止することができる。また、作業車両100の発進時や停止時等の急激な速度変化(ショック)の発生を防止し、乗り心地の向上を図ることができる。また、可動斜板22aをアクチュエータ73により調節する構成とすることにより、変速レバー50の操作力を低減することができる。また、可動斜板22aの傾斜角度が電子制御されている作業車両に、容易に適用することができるため、部品コストの増加を防止することができる。
【0052】
また、作業車両100は、回転動力を発生するエンジン10と、油圧ポンプ22及び油圧モータ24を有し、エンジン10が発生する回転動力を変速して駆動輪40へ伝達するHST20と、油圧ポンプ22の可動斜板22aの傾斜角度を変更することによりHST20の変速比を調節するアクチュエータ73と、HST20により変速された後のモータ出力軸25の回転数を設定する変速レバー(速度設定手段)50と、変速レバー50により設定される回転数(設定回転数)に基づいてアクチュエータ73の動作を制御する制御装置60と、を具備する作業車両100であって、制御装置60は、HST20により変速された後のモータ出力軸25の回転数が、前記設定回転数となるようにアクチュエータ73の動作を制御する可動斜板角制御手段61と、可動斜板角制御手段61によって制御されるアクチュエータ73が、所定の変化率βで動作するように制御する変化率制限手段62と、を具備するものである。このように構成することにより、作業車両100の加速度αを制限し、加速時及び減速時のスリップの発生を未然に防止することができる。また、作業車両100の発進時や停止時等の急激な速度変化(ショック)の発生を防止し、乗り心地の向上を図ることができる。また、可動斜板22aをアクチュエータ73により調節する構成とすることにより、変速レバー50の操作力を低減することができる。また、可動斜板22aの傾斜角度が電子制御されている作業車両に、容易に適用することができるため、部品コストの増加を防止することができる。また、アクチュエータ73の動作の変化率を制御することにより、設定回転数に対するアクチュエータ73の動作の追従性が悪い制御システムにおいても、正確に駆動輪40の回転数Vの変化率を制御することができる。
【0053】
以下では、図3を用いて、作業車両200について説明する。なお、前述の作業車両100(図1参照)と略同一の構成の部材には同一の符号を付し、説明を省略する。
【0054】
作業車両200が作業車両100と異なる点は、制御装置60に代えて、制御装置260、設定器74、傾斜センサ75を具備する点である。制御装置260は、設定器74、傾斜センサ75等に接続される。
【0055】
設定器74は、摩擦係数μの値を設定することによって、所定の変化率βを設定するものである。設定器74は、ポテンショメータを用いたダイヤル設定器や、回動操作されることにより調節可能なダイヤル式のスイッチ等で構成される。設定器74は、摩擦係数μの値を設定することができる構成であれば、限定するものではない。設定器74は、作業車両200の運転座席付近等の、オペレータが操作可能な位置に具備される。
【0056】
傾斜センサ75は、作業車両200の車体の傾斜角度θを検出するものである。傾斜センサ75は、作業車両200に具備される。
【0057】
ここで、作業車両200の傾斜角度θを考慮した場合の、作業車両200のスリップを防止するために必要な制御について説明する。作業車両200の傾斜角度θを考慮すると、式1は、以下の式5のように書き換えられる。
Ft=μ・m・g・cosθ ・・・(5)
式5に従って、式3及び式4は、以下の式6及び式7のように書き換えられる。
m・α≦μ・m・g・cosθ ・・・(6)
α≦μ・g・cosθ ・・・(7)
すなわち、加速度αがμ・g・cosθ以下である場合、スリップは発生しない。つまり、加速度αがμ・g・cosθ以下となるように、可動斜板22aの傾斜角度の変化率を制御することで、スリップの発生を防止することができる。
【0058】
制御装置260は、設定器74に接続され、設定器74により設定される摩擦係数μの検出信号を取得することが可能である。制御装置260は、傾斜センサ75に接続され、傾斜センサ75による作業車両200の傾斜角度θの検出信号を取得することが可能である。
【0059】
以下では、制御装置260によるアクチュエータ73の動作の制御態様について説明する。図3に示すように、制御装置260は、アクチュエータ73の動作を制御するための制御手段として、可動斜板角制御手段261及び変化率制限手段262を具備する。可動斜板角制御手段261は、入力されるレバー回動角検出センサ71及び出力軸回転数センサ72の検出信号に基づいて、モータ出力軸25を前記設定回転数で回転させるために必要なアクチュエータ73の動作量Xを算出し、アクチュエータ73を当該動作量Xだけ動作させる制御信号C3を出力する。
【0060】
変化率制限手段262は、入力される制御信号C3に基づいて、アクチュエータ73を動作量Xだけ所定の変化率βで動作させる制御信号C4を出力する。ここで、所定の変化率βは、変化率制限手段262によって、加速度αがμ・g・cosθ以下となる値に定められる。摩擦係数μの値は、設定器74の検出信号に基づいて設定される。傾斜角度θの値は、傾斜センサ75の検出信号に基づいて設定される。すなわち、オペレータは、設定器74を用いてμの値を設定することにより、路面の状態等に合わせて、所定の変化率βを所望の値に調節することが可能となる。
【0061】
アクチュエータ73は、制御信号C4に従い、動作量Xだけ所定の変化率βで動作する。これによって、モータ出力軸25の回転数は、前記設定回転数に向かって所定の変化率βで変化し、ひいては駆動輪40の回転数Vが変化率βで変化する。
【0062】
以上の如く、作業車両200は、所定の変化率βを設定する設定器(変化率設定手段)74を具備し、制御装置260は、設定器74による設定に基づいて所定の変化率βを調節するものである。このように構成することにより、路面の状態等に合わせて、アクチュエータ73の動作の変化率を所望の値に調節することができる。これによって、作業車両200の乗り心地を、オペレータにとって最適な乗り心地に調節することができる。
【0063】
また、作業車両200は、車体の傾斜角度を検出する傾斜センサ(傾斜角度検出手段)75を具備し、制御装置260は、傾斜センサ75により検出される車体の傾斜角度に基づいて所定の変化率βを調節するものである。このように構成することにより、坂道等を走行する場合に、アクチュエータ73の変化率を坂道の傾斜角度に基づいた変化率に調節することができる。これによって、傾斜角度に合わせて最適な制御を行うことができる。
【0064】
以下では、図4を用いて、作業車両300について説明する。なお、前述の作業車両200(図3参照)と略同一の構成の部材には同一の符号を付し、説明を省略する。
【0065】
作業車両300が作業車両200と異なる点は、制御装置260に代えて、制御装置360を具備する点である。
【0066】
制御装置360によるアクチュエータ73の動作の制御態様について説明する。図4に示すように、制御装置360は、アクチュエータ73の動作を制御するための制御手段として、可動斜板角制御手段361及び変化率制限手段362を具備する。変化率制限手段362は、目標回転数の値を、前記設定回転数の値となるまで所定の変化率βで変化させるとともに、当該目標回転数の値を制御信号C5によって出力する。ここで、所定の変化率βは、変化率制限手段362によって、加速度αがμ・g・cosθ以下となる値に定められる。摩擦係数μの値は、設定器74の検出信号に基づいて設定される。傾斜角度θの値は、傾斜センサ75の検出信号に基づいて設定される。
【0067】
可動斜板角制御手段361は、制御信号C5によって入力される前記目標回転数、及び出力軸回転数センサ72の検出信号に基づいて、モータ出力軸25を当該目標回転数で回転させるために必要なアクチュエータ73の動作量Xを算出し、アクチュエータ73を当該動作量Xだけ動作させる制御信号C6を出力する。可動斜板角制御手段361に入力される前記目標回転数の値は、前記設定回転数まで所定の変化率βで変化するため、これに伴い、制御信号C6によって出力するアクチュエータ73の動作量Xも、前記設定回転数に対応する動作量まで所定の変化率βで変化する。
【0068】
アクチュエータ73は、制御信号C6に従い、動作量Xだけ動作する。アクチュエータ73に入力される動作量Xの値は、前記設定回転数に対応する動作量まで所定の変化率βで変化するため、これに伴い、アクチュエータ73も所定の変化率βで動作する。
【0069】
本形態の如く構成することによって、モータ出力軸25の回転数は、前記設定回転数に向かって所定の変化率βで変化し、ひいては駆動輪40の回転数Vが変化率βで変化する。
【0070】
以上の如く、作業車両300は、回転動力を発生するエンジン10と、油圧ポンプ22及び油圧モータ24を有し、エンジン10が発生する回転動力を変速して駆動輪40へ伝達するHST20と、油圧ポンプ22の可動斜板22aの傾斜角度を変更することによりHST20の変速比を調節するアクチュエータ73と、HST20により変速された後のモータ出力軸25の回転数を設定する変速レバー(速度設定手段)50と、変速レバー50により設定される回転数(設定回転数)に基づいてアクチュエータ73の動作を制御する制御装置360と、を具備する作業車両100であって、制御装置360は、目標回転数を、変速レバー50により設定された回転数となるまで所定の変化率βで変化させる変化率制限手段362と、HST20により変速された後のモータ出力軸25の回転数が、前記目標回転数となるようにアクチュエータ73の動作を制御する可動斜板角制御手段361と、を具備するものである。このように構成することにより、作業車両300の加速度αを制限し、加速時及び減速時のスリップの発生を未然に防止することができる。また、作業車両300の発進時や停止時等の急激な速度変化(ショック)の発生を防止し、乗り心地の向上を図ることができる。また、可動斜板22aをアクチュエータ73により調節する構成とすることにより、変速レバー50の操作力を低減することができる。
【0071】
以下では、図5を用いて、作業車両400について説明する。なお、前述の作業車両100(図1参照)と略同一の構成の部材には同一の符号を付し、説明を省略する。
【0072】
作業車両400は、モータ480が発生する回転動力により駆動するものである。作業車両400が作業車両100と異なる点は、エンジン10、HST20、アクチュエータ73、及び制御装置60に代えて、モータ480、制御装置460を具備する点である。
【0073】
モータ480は、駆動輪40を回転させる回転動力を発生するものである。モータ480には、モータ出力軸25の一端が連動連結される。
【0074】
制御装置460は、モータ480の回転数を制御するものである。制御装置460は、主としてレバー回動角検出センサ71、出力軸回転数センサ72、モータ480等に接続される。
【0075】
以下では、制御装置460によるモータ480の回転数の制御態様について説明する。制御装置460は、モータ480の回転数を制御するための制御手段として、回転数制御手段463及び変化率制限手段462を具備する。
【0076】
回転数制御手段463は、入力されるレバー回動角検出センサ71及び出力軸回転数センサ72の検出信号に基づいて、モータ480を前記設定回転数で回転させる制御信号C7を出力する。
【0077】
変化率制限手段462は、入力される制御信号C7に基づいて、モータ480の回転数を前記設定回転数まで所定の変化率βで変化させる制御信号C8を出力する。ここで、所定の変化率βは、変化率制限手段462によって、加速度αがμ・g以下となる値に、すなわち、スリップの発生を防止することができる値に定められる。なお、本形態において、摩擦係数μの値は、実験や数値計算等に基づいて定められ、制御装置460に記憶される。
【0078】
モータ480は、制御信号C8に従い、回転数を前記設定回転数まで所定の変化率βで変化させる。これによって、モータ出力軸25の回転数は、前記設定回転数に向かって所定の変化率βで変化し、ひいては駆動輪40の回転数Vが所定の変化率βで変化する。
【0079】
以上の如く、作業車両400は、駆動輪40を回転させる回転動力を発生するモータ480と、モータ480の回転数を設定する変速レバー(速度設定手段)50と、モータ480の回転数が、変速レバー50により設定された回転数となるまで所定の変化率βで変化するようにモータ480の回転数を制御する制御装置460と、を具備するものである。このように構成することにより、作業車両400の加速度αを制限し、加速時及び減速時のスリップの発生を未然に防止することができる。また、作業車両400の発進時や停止時等の急激な速度変化(ショック)の発生を防止し、乗り心地の向上を図ることができる。また、モータ480により駆動する構成としたことによって、変速レバー50の操作力を低減することができる。また、モータ480の回転数を制御することにより駆動する構成の作業車両に、容易に適用することができるため、部品コストの増加を防止することができる。
【0080】
なお、制御装置460に、設定器74及び傾斜センサ75を接続する構成とすることも可能である。このように構成した場合、変化率制限手段462は、所定の変化率βの値を、加速度αがμ・g・cosθ以下となるように定める。摩擦係数μの値は、設定器74の検出信号に基づいて設定される。傾斜角度θの値は、傾斜センサ75の検出信号に基づいて設定される。
【0081】
以下では、図6を用いて、作業車両500について説明する。なお、前述の作業車両200(図3参照)と略同一の構成の部材には同一の符号を付し、説明を省略する。
【0082】
作業車両500は、作業車両200の如く、可動斜板22aを電子制御するものではない。作業車両500が作業車両200と異なる点は、変速レバー50、レバー回動角検出センサ71、出力軸回転数センサ72、アクチュエータ73、傾斜センサ75、及び制御装置260に代えて、変速レバー550、制御装置560、及び減衰力調整式ダンパ(以下、単に「可変ダンパ」と記す)570を具備する点である。なお、本形態において、減衰力設定手段は、設定器74及び制御装置560により構成される。
【0083】
作業車両500は、可動斜板22aの傾斜角度を変速レバー550により直接調整するよう構成される。変速レバー550には、可変ダンパ570が具備される。可変ダンパ570は、減衰力を所望の値、または予め設定される複数種類の値に変更可能に構成されたダンパである。可変ダンパ570は、電磁弁等でオリフィスの断面積を変化させるものや、作動流体として磁性流体を用い、当該磁性流体の粘度をコイルによって変化させるもの等により構成される。
【0084】
変速レバー550に可変ダンパ570を具備することにより、オペレータによる変速レバー550の操作の変化率が、所定の変化率に制限される。当該変化率は、可変ダンパ570の減衰力に基づいて決定される。
【0085】
制御装置560は、可変ダンパ570の減衰力を調節するものである。制御装置560は、設定器74に接続され、設定器74により設定される摩擦係数μの検出信号を取得することが可能である。制御装置560は、可変ダンパ570に接続され、可変ダンパ570の減衰力を制御することが可能である。
【0086】
以下では、制御装置560による可変ダンパ570の減衰力の制御態様について説明する。制御装置560は、設定器74の検出信号に基づいて、可変ダンパ570の減衰力を調整する。例えば、路面の状態が、濡れている等のスリップが発生し易い状態の場合、オペレータは、設定器74により摩擦係数μの値を小さい値に設定する。制御装置560は、摩擦係数μが小さい値に設定されると、可変ダンパ570の減衰力を当該摩擦係数μに対応する値まで高くする。この場合の減衰力は、加速度αがμ・g以下となるような値に設定される。これによって、変速レバー550の操作の変化率が制限され、スリップの発生を防止することができる。
【0087】
また、路面の状態が、スリップが発生し難い状態の場合、オペレータは、設定器74により摩擦係数μの値を大きい値に設定する。制御装置560は、摩擦係数μが大きい値に設定されると、可変ダンパ570の減衰力を当該摩擦係数μに対応する値まで低くする。この場合の減衰力も、加速度αがμ・g以下となるような値に設定される。これによって、変速レバー550の操作の変化率が制限され、スリップの発生を防止することができる。
【0088】
以上の如く、作業車両500は、回転動力を発生するエンジン10と、油圧ポンプ22及び油圧モータ24を有し、エンジン10が発生する回転動力を変速して駆動輪40へ伝達するHST20と、油圧ポンプ22の可動斜板22aの傾斜角度を変更することによりHST20の変速比を調節する変速レバー(速度設定手段)550と、変速レバー550の変化率を所定の変化率βに制限する可変ダンパ(減衰力調整式ダンパ)570と、可変ダンパ570の減衰力を調節することにより、所定の変化率βを設定する設定器74及び制御装置560(減衰力設定手段)と、を具備するものである。このように構成することにより、作業車両500の加速度αを制限し、加速時及び減速時のスリップの発生を未然に防止することができる。また、作業車両500の発進時や停止時等の急激な速度変化(ショック)の発生を防止し、乗り心地の向上を図ることができる。また、路面の状態等に合わせて、可動斜板22aの動作の変化率を所望の値に調節することができる。これによって、作業車両500の乗り心地を、オペレータ自身にとって最適な乗り心地に調節することができる。また、本形態の如く構成した制御システムであれば、変速装置に電子制御システムを適用していない作業車両であっても、容易にスリップ防止のための制御を行うことができる。
【0089】
なお、可変ダンパ570の減衰力を、制御装置560により調節する構成としたが、これに限るものではない。例えば、図7に示すように、制御装置560による電子制御を用いず、設定器574(減衰力設定手段)により設定される摩擦係数μの値に応じて、可変ダンパ570が備える可変オリフィスの開度を機械的に調節する構成とすることも可能である。
【符号の説明】
【0090】
10 エンジン
20 HST(油圧式無段変速装置)
25 モータ出力軸(出力軸)
50 変速レバー(速度設定手段)
60 制御装置
61 可動斜板角制御手段
62 変化率制限手段
74 設定器(変化率設定手段)
75 傾斜センサ(傾斜角度検出手段)
100 作業車両
480 モータ
570 可変ダンパ(減衰力調整式ダンパ)
【特許請求の範囲】
【請求項1】
駆動輪を回転させる回転動力を発生するモータと、
前記モータの回転数を設定する速度設定手段と、
前記モータの回転数が、前記速度設定手段により設定された回転数となるまで所定の変化率で変化するように前記モータの回転数を制御する制御装置と、
を具備する作業車両。
【請求項2】
前記所定の変化率を設定する変化率設定手段を具備し、
前記制御装置は、
前記変化率設定手段による設定に基づいて前記所定の変化率を調節する請求項1に記載の作業車両。
【請求項3】
車体の傾斜角度を検出する傾斜角度検出手段を具備し、
前記制御装置は、
前記傾斜角度検出手段により検出される車体の傾斜角度に基づいて前記所定の変化率を調節する請求項1又は請求項2に記載の作業車両。
【請求項1】
駆動輪を回転させる回転動力を発生するモータと、
前記モータの回転数を設定する速度設定手段と、
前記モータの回転数が、前記速度設定手段により設定された回転数となるまで所定の変化率で変化するように前記モータの回転数を制御する制御装置と、
を具備する作業車両。
【請求項2】
前記所定の変化率を設定する変化率設定手段を具備し、
前記制御装置は、
前記変化率設定手段による設定に基づいて前記所定の変化率を調節する請求項1に記載の作業車両。
【請求項3】
車体の傾斜角度を検出する傾斜角度検出手段を具備し、
前記制御装置は、
前記傾斜角度検出手段により検出される車体の傾斜角度に基づいて前記所定の変化率を調節する請求項1又は請求項2に記載の作業車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−100909(P2013−100909A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2013−9514(P2013−9514)
【出願日】平成25年1月22日(2013.1.22)
【分割の表示】特願2008−105038(P2008−105038)の分割
【原出願日】平成20年4月14日(2008.4.14)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成25年1月22日(2013.1.22)
【分割の表示】特願2008−105038(P2008−105038)の分割
【原出願日】平成20年4月14日(2008.4.14)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
[ Back to top ]