
作業車両
【課題】走行車速の変速制御感度の設定の自由度を確保しつつ、変速制御感度を低感度に設定した場合でも、緊急停止に対応可能とする変速制御システムを備えた無段変速式の作業車両を提供する。
【解決手段】作業車両は、停止車速を含む車速範囲を無段階に変速動作してエンジン動力を走行部に変速伝動する無段変速機構(11)と、この無段変速機構(11)を前後進の各走行方向について変速ペダル(7b)の踏込量に基づく目標変速比に変速制御する制御部(P)とを備えて構成され、上記制御部(P)は、上記変速ペダル(7b)の操作に対する無段変速機構(11)の追従動作を規定するための感度設定具(9b)を備えてその設定感度が所定の標準感度より低感度の場合に、上記変速ペダル(7b)の踏込み後の解除操作について、上記標準感度で停止車速に変速制御するものである。
【解決手段】作業車両は、停止車速を含む車速範囲を無段階に変速動作してエンジン動力を走行部に変速伝動する無段変速機構(11)と、この無段変速機構(11)を前後進の各走行方向について変速ペダル(7b)の踏込量に基づく目標変速比に変速制御する制御部(P)とを備えて構成され、上記制御部(P)は、上記変速ペダル(7b)の操作に対する無段変速機構(11)の追従動作を規定するための感度設定具(9b)を備えてその設定感度が所定の標準感度より低感度の場合に、上記変速ペダル(7b)の踏込み後の解除操作について、上記標準感度で停止車速に変速制御するものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ペダル操作対応で無段で自動変速する作業車両に関するものである。
【背景技術】
【0002】
特許文献1の無段変速式作業車両は、静油圧式無段変速機構を備えて変速ペダル操作対応のトラニオン動作制御により自動変速させる変速制御装置を備える。この変速制御装置は、無段変速機構の変速の際のトラニオン動作について、その目標位置と動作位置との偏差に応じて追従動作速度をマップデータにより切替えることにより、前進時と後進時のそれぞれの変速制御感度を任意に設定することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−270607号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記作業車両は、無段変速機構の変速時の追従動作が低速になるように変速制御感度を設定した場合は、急増速によるショックを抑えることができるものの、踏込んだ変速ペダルの解除操作時においても、停止車速まで徐々に減速することとなるので、緊急停止による対応が困難となるという問題があった。
【0005】
本発明の目的は、走行車速の変速制御感度の設定の自由度を確保しつつ、変速制御感度を低感度に設定した場合でも、緊急停止に対応可能とする変速制御システムを備えた無段変速式の作業車両を提供することにある。
【課題を解決するための手段】
【0006】
請求項1に係る発明は、停止車速を含む車速範囲を無段階に変速動作してエンジン動力を走行部に変速伝動する無段変速機構(11)と、この無段変速機構(11)を前後進の各走行方向について変速ペダル(7b)の踏込量に基づく目標変速比に変速制御する制御部(P)とを備える作業車両において、上記制御部(P)は、上記変速ペダル(7b)の操作に対する無段変速機構(11)の追従動作を規定するための感度設定具(9b)を備える構成とし、この感度設定具(9b)による設定感度が所定の標準感度より低感度の場合に、上記変速ペダル(7b)の踏込み後の解除操作について、上記標準感度で停止車速に変速制御することを特徴とする。
【0007】
請求項2に係る発明は、請求項1に係る発明において、前記感度設定具(9b)が前記標準感度より高感度の設定の場合に、変速ペダル(7b)の踏込量が所定の基準値以上の踏込み操作について、前記無段変速機構(11)を同標準感度で変速制御することを特徴とする。
【0008】
請求項3に係る発明は、請求項1又は請求項2のいずれかに係る発明において、前記感度設定具(9b)は、感度を設定するためのダイヤル範囲を最小から最大までの感度範囲と対応して備えるとともに、その最大感度のダイヤル位置を上記感度範囲外の所定の感度としたことを特徴とする。
【発明の効果】
【0009】
請求項1に係る発明により、制御部は、変速ペダルが踏込み操作されると、選択されている前後進の各走行方向について感度設定具による設定感度による追従動作位置に無段変速機構を変速制御し、また、標準感度より低感度の設定の場合は、変速ペダルが踏込みから解除操作されると、標準感度で停止車速に変速制御する。したがって、任意の感度設定を可能とする感度設定具によって低感度に設定した場合については、変速ペダルの踏込操作について増速ショックを抑えつつ踏込対応車速まで緩やかに追従増速され、その一方で、変速ペダルの解除操作に応じて速やかに停止車速まで追従減速されるので、急減速を要する事態に対応することができる。
【0010】
請求項2に係る発明により、請求項1に係る発明の効果に加え、感度設定具を高感度に設定した場合に、変速ペダルの踏込量が基準値未満であれば、設定の制御感度で無段変速機構が変速制御され、また、踏込量が基準値以上であれば、標準感度で変速制御される。したがって、高感度の設定の場合は、変速ペダルの踏込みが小さい操作のときに速やかに追従増速され、一方、踏込みが大きいときは通常の追従増速となるので、エンジン回転のハンチングを招くことなく、安定した増速が可能となる。
【0011】
請求項3に係る発明により、請求項1又は請求項2のいずれかに係る発明の効果に加え、感度設定具は、最小から最大までの感度範囲と対応するダイヤル範囲によって感度を設定することができるのみならず、その最大感度のダイヤル位置では、任意の感度を設定することができるので、通常範囲の感度による変速動作とそれを越える高感度制御による変速動作、即ち、急な加速を要する場合に有効となり、幅広い作業に対応することが可能となる。
【図面の簡単な説明】
【0012】
【図1】トラクタの全体構成の平面図
【図2】変速設定部の拡大図
【図3】走行伝動系の構成ブロック図
【図4】伝動系統の構成展開図
【図5】静油圧式の無段変速機構の内部構成と油圧回路図
【図6】変速制御システムの入出力ブロック図
【図7】制御処理例1のフローチャート
【図8】制御処理例2のフローチャート
【図9】制御処理例3のフローチャート
【図10】制御処理例4のフローチャート
【図11】制御処理例5のフローチャート
【図12】制御処理例6のフローチャート
【図13】ペダル操作とバルブ駆動電流の特性図
【図14】制御処理例7のフローチャート
【図15】最高速規制例の特性図
【図16】制御処理例8のフローチャート
【図17】制御処理例9のフローチャート
【図18】制御処理例10のフローチャート
【図19】比例ソレノイド駆動電流と車速軸出力回転数の特性図
【図20】制御処理例11のフローチャート
【図21】制御処理例12のフローチャート
【図22】制御処理例13のフローチャート
【図23】制御処理例14のフローチャート
【図24】制御処理例15のフローチャート
【図25】制御処理例16のフローチャート
【図26】制御処理例17のフローチャート
【図27】制御処理例18のフローチャート
【図28】制御処理例19のフローチャート
【図29】制御処理例20のフローチャート
【図30】制御処理例21のフローチャート
【図31】制御処理例22のフローチャート
【図32】制御処理例23のフローチャート
【図33】制御処理例24のフローチャート
【図34】制御処理例25のフローチャート
【図35】制御処理例26のフローチャート
【図36】制御処理例27のフローチャート
【発明を実施するための形態】
【0013】
上記技術思想に基づいて具体的に構成された実施の形態について以下に図面を参照しつつ説明する。
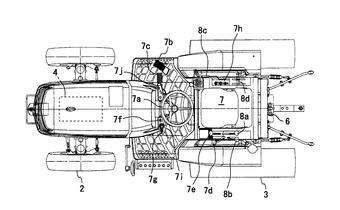
図1は、本発明の適用対象となる作業車両の一例として示すトラクタの全体構成平面図である。この作業車両1は、前後の走行車輪2,3によって圃場作業可能に機体を支持しており、機体の前部又は後部に作業機を装着して作業を行う。機体前部のエンジンルーム内に搭載しているエンジン4からの動力を受けて走行車輪2,3に動力伝達を行う。この走行車輪2,3への動力伝達は、変速装置5の副変速機構12(有段変速)と無段変速機構11で変速された動力が無段変速伝動されていく。また、無段変速機構11に入力された動力のうち無段変速されない動力がPTOと略称される作業動力供給部6に伝達されていく。作業動力供給部6は、機体後部のPTO機構16aと機体中央下部のPTO機構16bから構成されている。
【0014】
また、作業座席7を中心に、各種の機器操作具を備え、走行操作用として、ハンドル7a、変速ペダル7b、左右セットのブレーキペダル7c(連結解除により左ブレーキペダルと右ブレーキペダルとして使用)、副変速レバー7d、後輪駆動と4輪駆動を切り換える4WDレバー7e、エンジンを緊急停止する緊急停止スイッチ7f、ウィンカスイッチ7g、変速設定部7h、作業機操作用として、リヤとミッドのPTOレバー8a,8b、装着している作業機の昇降位置を決定するポジションレバー8c、前後進レバー7i、エンジン回転数を設定するスロットルレバー7j、別の油圧機器を駆動する2連の外部油圧レバー8d等を備えて構成される。前記副変速レバー7dは、図4に示す有段変速の副変速機構12の変速操作を行うもので、3段変速が可能な構成となっている。
【0015】
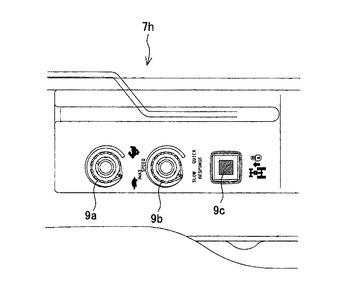
前記変速設定部7hには、図2に拡大図を示すように、最高速設定ダイヤル9a、レスポンスコントロールダイヤル9b、クルーズコントロールスイッチ9cが配置される。
最高速設定ダイヤル9aは、車体の最高速を決定するものであり、最高速が決定されると変速ペダル7bを最大まで踏み込んでも決定された最高速までしか出ない構成としている。
レスポンスコントロールダイヤル9bは、後述しているように、変速ペダル7bを踏んで目標車速まで加速する場合において、目標車速までの到達時間を短くしたり早くしたりする構成としている。
クルーズコントロールスイッチ9cを入り状態にすると、変速ペダル7bの操作を止めても入り状態にした時点の速度を維持し続ける構成である。
【0016】
上記変速装置5による走行伝動系は、図3に構成ブロック図を示すように、エンジン動力を受けるHSTと略称される静油圧式の無段変速機構11および車速域を切替える副変速機構12を動力伝達上流側から下流側にかけて直列に配置し、後輪3等の伝動機構13に伝動する。この走行伝動系に、エンジン4の回転センサ4r、無段変速機構11の出力回転センサ11r、副変速機構12の出力回転センサ12r等による機器動作センサを設け、変速ペダル7b等の変速操作具に基づいて無段変速機構11を制御する制御部Pとにより変速システムを構成する。
【0017】
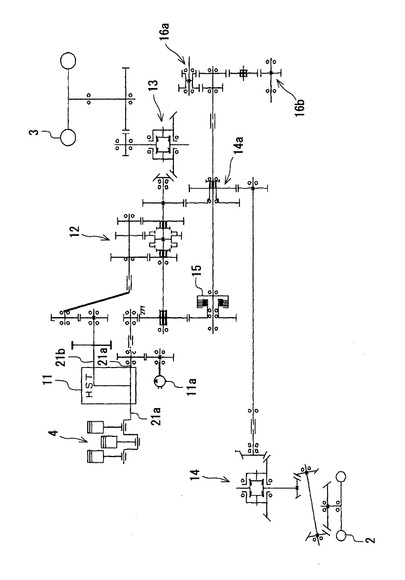
変速装置5は、図4に伝動系統展開図を示すように、無段変速機構11、副変速機構12、後輪伝動機構13、前輪伝動機構14に至る4WD切替部14a等による走行系機器を備えている。作業速から路上速の範囲で車速域を選択する副変速機構12による各車速域について無段変速機構11で無段変速し、この変速動力を前後輪2,3に伝動出力している。また、エンジン4から無段変速機構11に入力された動力のうち、無段変速されない動力がPTOクラッチ15を経てリヤとミッドのPTO機構16a,16bから作業機を作動可能に構成している。即ち、無段変速機構11に入力されたエンジン4からの出力軸21aは、エンジン4と反対側(変速装置5側)に突出しており、複数のギアを介してPTOクラッチ15へと動力伝達されている構成である。これにより、リヤPTO機構16aとミッドPTO機構16bは、一定回転で回転する構成となる。
【0018】
11aは無段変速機構11のチャージポンプであり、変速装置5を囲うトランスミッションケース内に内装している。リヤPTO機構16aは、機体後部に装着するロータリー、除雪機、モーア等を駆動する。ミッドPTO機構16bは、前輪2と後輪3との間の機体下部に装着するモーア、除雪機、路上清掃機等を駆動する。
【0019】
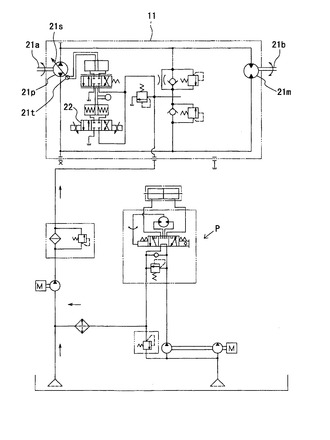
無段変速機構11は、図5に内部構成と油圧回路図を示すように、エンジン動力によって駆動される出力可変式の油圧ポンプ21pとそのポンプ出力を受ける定量油圧モータ21mとによって構成される。油圧ポンプ21pは、エンジン4からの出力軸21aと直結で駆動される。油圧ポンプ21pは出力調整用のトラニオン軸21tが構成され、このトラニオン軸21tの回動で斜板21sの角度が変化する。斜板21sの角度位置により作動油の送油方向および出力停止を含む流量調節を介して定量油圧モータ21mを駆動し、その出力軸21bから出力停止の中立を含む正逆の変速回転動力を伝動出力する。油圧ポンプ21pのトラニオン角制御は、サーボ機構のHST制御により、比例ソレノイドバルブ22の正逆の方向別の駆動電流によって作動油流量を調節し、電流値に応じた回動位置にトラニオン軸21tを制御する。符号Pはパワーステアリングの油圧回路を示している。
【0020】
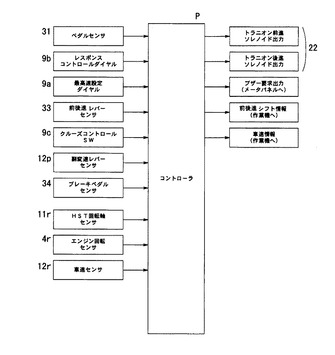
変速制御システムは、図6に入出力ブロック図を示すように、変速ペダル7bのペダルセンサ31、感度設定具であるレスポンスコントロールダイヤル9b、最高速設定ダイヤル9a、前後進レバー7iの前進又は後進位置を検出する前後進レバーセンサ33、クルーズコントロールスイッチ9c、副変速レバーセンサ12p、ブレーキペダルセンサ34、HST回転センサ11r、エンジン回転センサ4r、車速センサ12r等の各信号を制御部Pに入力し、比例ソレノイドバルブ22を感度設定具9bのダイヤル位置に対応するテーブルデータに基づいて前後進の方向別に電流制御可能に構成する。機体を走行させるときには、前後進レバー7iで前進又は後進を選択し、変速ペダル7bを踏み込み操作することで走行を開始する。
【0021】
このように、無段変速式作業車両は、停止車速を含む車速範囲を無段階に変速動作してエンジン動力を走行部2,3に変速伝動する無段変速機構11と、この無段変速機構11を前後進の各走行方向について変速ペダル7bの踏込量に基づく目標変速比に変速制御する制御部Pとによる制御システムを備えて構成されている。制御部Pには、ダイヤル式の感度設定具9bにより感度信号を受け、標準感度を中心に低感度から高感度の所定の範囲でダイヤル位置に対応して変速ペダル7bの踏込み操作に対する無段変速機構11の追従動作を緩急に調節することができる。具体的には、変速ペダル7bを踏み込み操作すると、ペダルセンサ31で目標車速が決定され、この目標車速が出るようにトラニオン軸21tを目標位置まで回動するが、トラニオン軸21tを目標位置まで回動させる時間を早くしたり遅くしたりする。その後、車速センサ12rによる検出値をフィードバックして、目標車速から外れている場合はトラニオン軸21tを再び回動して調整する。
【0022】
(走行変速制御)
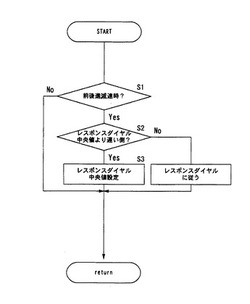
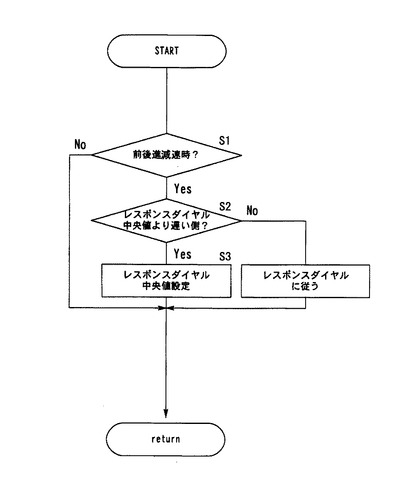
上記変速システムによる具体的な変速制御として、感度設定具9bが標準感度より低感度の設定の場合について説明すると、変速ペダル7bの踏込み後の解除操作でトラニオン軸21tを中立位置に戻す場合において、ゆっくり戻すと減速に時間がかかってしまう。そこで、図7の制御処理例1のフローチャートを示すように、減速の判定の第1の処理ステップ(以下において、「S1」の如く略記する。)により、該当する場合は、感度設定具9bの設定感度が所定の標準感度より低感度の場合に限り、上記標準感度で停止車速になるようにトラニオン軸21tを回動して変速制御する制御処理(S2,S3)を行う構成とする。
【0023】
上記変速制御により、制御部Pは、変速ペダル7bが踏込み操作されると、選択されている前後進の各走行方向について感度設定具9bによる設定感度による追従動作位置に無段変速機構11を変速制御し、標準感度より低感度の設定の場合については、変速ペダル7bが踏込みから解除操作されると、標準感度で停止車速に変速制御する。したがって、任意の感度設定を可能とする感度設定具9bによって低感度に設定した場合は、変速ペダル7bの踏込操作について増速ショックを抑えて緩やかに踏込対応車速まで追従増速され、その一方で、変速ペダル7bの解除操作に応じて速やかに停止車速まで追従減速されるので、急減速を要する事態に対応することができる。
【0024】
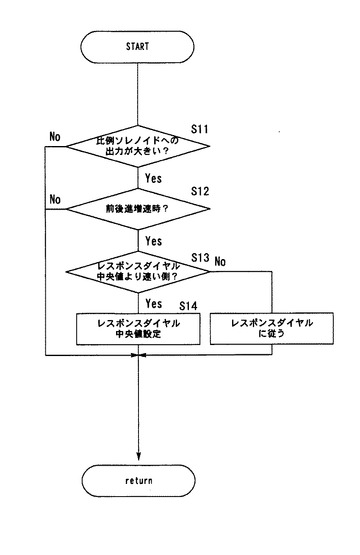
次に、感度設定具9bが標準感度より高感度の設定の場合の変速制御は、図8に制御処理例2のフローチャートを示すように、変速ペダル7bの踏込量が所定の基準値(例えば、50%)以上の踏込み操作(S11,S12)について、前進増速時または後進増速時に、標準感度で変速制御する制御処理(S13,S14)を構成する。
【0025】
上記制御処理により、感度設定具9bを高感度に設定した場合に、変速ペダル7bの踏込量が基準値未満であれば、設定の動作感度で無段変速機構11が設定による高感度で変速制御され、また、踏込量が基準値以上であれば、標準感度で変速制御される。したがって、高感度の設定の場合は、変速ペダルの踏込みが小さい操作のときに速やかに追従増速され、一方、踏込みが大きいときは通常の追従増速となるので、エンジン回転のハンチングを招くことなく、安定した増速が可能となる。
【0026】
次に、前進走行におけるブレーキ操作の際の変速制御について説明する。
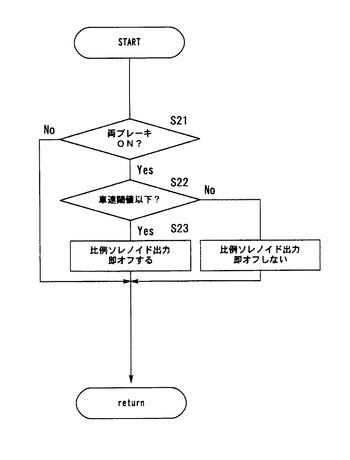
従来は、左右の両ブレーキペダル7cの操作に対応して少しずつ比例ソレノイドバルブ22への出力を落としていったときに、車速がほぼ停止状態であっても比例ソレノイドバルブ22への出力が継続していると、ブレーキペダル7cの踏込み解除によって微速走行することがあるので、このような不安定状態を解消するために、図9に制御処理例3のフローチャートを示すように、走行中において左右の両ブレーキペダル7cを同時踏込み操作が判定された場合(S21)に、車速が停止速近傍の所定の閾値(例えば、0.5km/h)以下になった時点で、比例ソレノイドバルブ22への出力を即時オフする制御処理(S22,S23)を構成する。
【0027】
上記制御処理により、ブレーキ操作と対応する減速動作により所定の閾値による略停止状態まで減速された時点で無段変速機構11のトラニオン軸21tが中立位置に復帰して回転出力が停止されるので、ブレーキペダル7cから足を離したときに、安全に停止状態を保つことができる。
【0028】
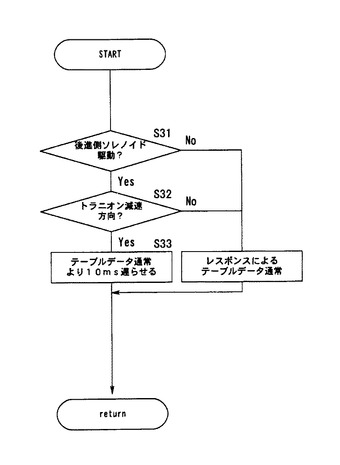
また、後進側減速時の変速制御については、図10に制御処理例4のフローチャートを示すように、比例ソレノイドバルブ22が後進側駆動の場合(S31)の減速時に限り(S32)、感度設定具9bのレンジによって予め設定されている比例ソレノイドバルブ22の駆動電流を変更するタイミングを全てのレンジにおいて一定時間(例えば、10ms)遅らせたテーブルデータによって減速する制御処理(S33)を構成する。
【0029】
一般に、無段変速機構の後進側にオリフィスがあってブレーキ圧が起ちやすく、後進側の減速がきつくなる特性を有する無段変速機構について、上記制御処理により、後進走行時の減速動作のタイミングの遅れによって前進側の減速に比べてきつくなくなることから、後進側の走行フィーリングを改善することができる。
【0030】
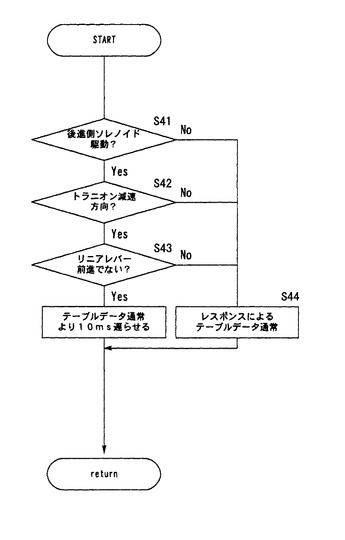
また、後進側の減速中の前後進レバー7i操作時の変速制御については、図11に制御処理例5のフローチャートを示すように、比例ソレノイドバルブ22が後進側の減速中である場合(S41,S42)に、逆方向の前進側にリニアレバーとも略称される前後進レバー7iが操作された時に以後の後進側減速動作について、前進側と同じテーブルデータを適用する制御処理(S43,S44)を構成することにより、後進走行時に変速ペダル7bを踏んだまま前後進レバー7iが前進に操作された場合に前進走行時と同様に減速制御されることから、前記の如くのタイミング遅れ制御による前進への切替え遅れが回避されるので、走行フィーリングを向上することができる。
【0031】
次に、感度設定具による特別の感度設定について説明する。
感度設定具9bは、感度を設定するためのダイヤル範囲を最小から最大までの感度範囲と対応させ、その最大感度となる一側端のダイヤル位置で、最大感度を越える所定の特別感度(例えば、最大感度の2倍の感度)を設定可能に目盛表示して構成する。
【0032】
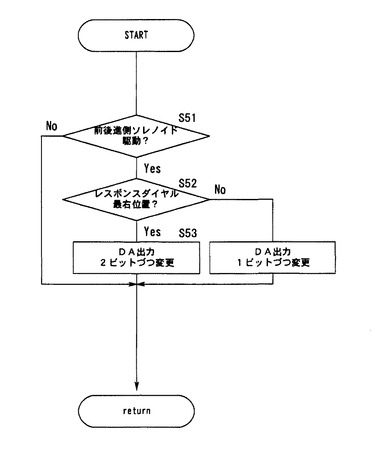
このように構成した感度設定具9bのダイヤル位置がダイヤル範囲の一端の最大感度位置に設定された場合の具体的な制御は、図12に制御処理例6のフローチャートを示すように、比例ソレノイドバルブ22が前後進の駆動(S51)の場合に、感度設定具9bのダイヤル位置が最大感度位置であればその設定感度を1ビットの目盛単位を2ビットとして最大感度の2倍の感度とする制御処理(S52,S53)を構成する。
【0033】
上記制御処理により、感度設定具9bは、最小から最大までの感度範囲と対応するダイヤル範囲によって感度を設定することができるのみならず、その最大感度のダイヤル位置では、更に高い特定の感度を設定することができるので、通常範囲の感度による変速動作とそれを越える特別感度の変速動作により、幅広い作業に対応することが可能となる。
【0034】
次に、機器の個別特性対応の制御処理について説明する。
一般に、無段変速機構11の動作について、その動作制御用の比例ソレノイドバルブ22の駆動電流との関係の個体差により、作業車両は、本機が動き出すときの変速ペダル7bの踏込量に個体差が生じる。このような問題に対し、個別特性に基づいて算出したバルブ駆動電流によって動作制御することにより、ペダル操作と対応する変速動作を共通化することができる。
【0035】
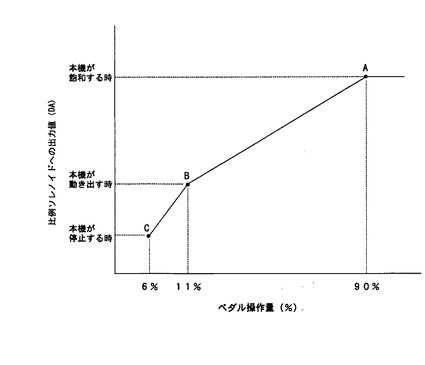
具体的には、図13にペダル操作とバルブ駆動電流の特性図を示すように、本機が停止状態から動き出す時Bの比例ソレノイドバルブ22への出力値、本機が動いている状態から停止する時Cの比例ソレノイドバルブ22への出力値、出力増加によっても速度が上限となる飽和時Aの比例ソレノイドバルブ22への出力値の3点を計測してEEPROMに個々の特性として記憶し、これら3点から変速ペダル7bの操作量に応じて算出される出力値によって無段変速機構11を制御する。
【0036】
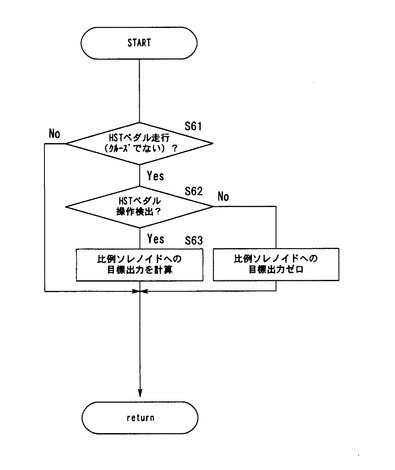
上記特性差を踏まえた無段変速機構11の制御は、図14に制御処理例7のフローチャートを示すように、変速ペダル7bによる走行の場合(S61)において、ペダル操作の検出に応じて目標のバルブ駆動電流を算出(S62,S63)する制御処理を構成することにより、個体差によるバラツキを吸収してどの機械でも同様な動作を可能にすることができる。
【0037】
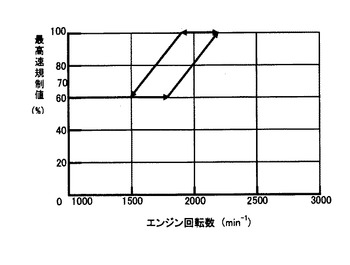
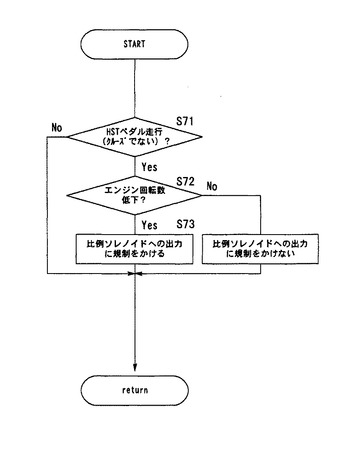
次に、高負荷を受けた場合の変速制御は、最高速設定ダイヤル9aによって比例ソレノイドへの出力を60%以下の範囲に規制する図15の特性図による最高速規制例と同様に制御する。すなわち、制御処理例8のフローチャートを図16に示すように、変速ペダル7bによる走行の場合(S71)において、負荷の増加によってエンジン回転数の低下を検出した時に、比例ソレノイドバルブ22への出力に規制をかける制御処理(S72,S73)を構成する。
【0038】
上記制御処理により、負荷がかかりやすい作業において、バルブ駆動電流を規制することにより、エンストなしに作業の円滑な継続が可能となるので、急な上り坂で無段変速機構11に負荷がかかってエンストすることにより危険を招く事態等を回避することができる。
【0039】
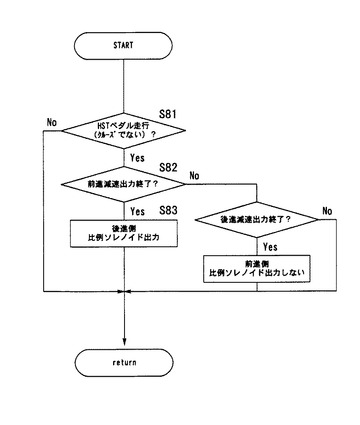
次に、前進走行中のペダル戻し時の減速制御について説明すると、図17に制御処理例9のフローチャートを示すように、変速ペダル7bによる走行の場合(S81)において、前進走行時の変速ペダル7bの戻し操作によって停止する際の前進減速出力終了(S82)の後に、比例ソレノイドバルブ22に一定時間(例えば、50ms)の後進側出力につき一定周期(例えば、2s)の繰返しを5回行う制御処理(S83)を構成することにより、前進走行時に変速ペダル7bから足を離して減速しても、トラニオンが中立位置まで戻りきらずに微速動作する事態を解消して安全に停止状態を保つことができる。
【0040】
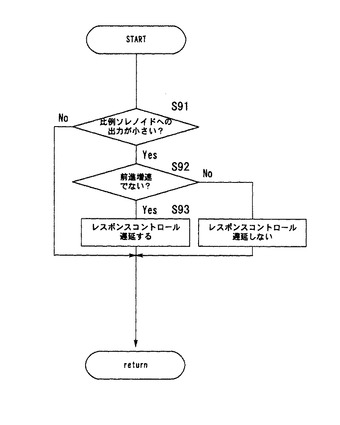
次に、変速ペダル7bの踏込みが小さい場合(例えば、踏込量が25%以下)において感度設定具9bによる感度を反映する変速制御は、図18に制御処理例10のフローチャートを示すように、比例ソレノイドバルブ22への出力の小さい範囲に限り(S91)、前進増速を除く変速について更に一定時間(例えば、10ms)を遅延する制御処理(S92,S93)を構成することにより、前進の減速、後進の増減速における走行ショックが緩和されて走行フィーリングを改善することができる。
【0041】
(調整モード)
次に、無段変速機構11の特性を記憶させる調整モードの制御処理について説明する。
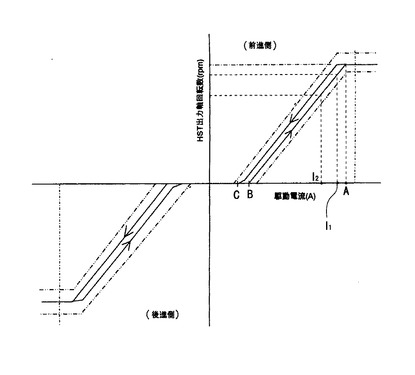
無段変速機構11の特性は、図19に比例ソレノイドの駆動電流と車速軸の出力回転数の特性図を示すように、前進側と後進側のそれぞれについて、発進点Bから飽和点Aまでの電流増加によって回転数が上限に達した後、電流減少によって停止点Cに至るヒステリシスを示し、また、電流と回転数特性及び最大出力は、供給圧力と関与する部品によって一定のバラツキ幅を有する。
【0042】
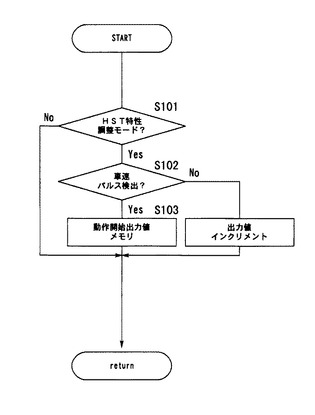
上記特性を有する無段変速機構11の制御のために、図20に制御処理例11のフローチャートを示すように、調整モードの場合(S101)において、比例ソレノイド駆動電流を少しずつ増加させていき、車速パルスの検出が始まった時の出力値Bをメモリー(S102,S103)する制御処理を構成し、このメモリーされた出力値Bを開始動作点として通常モードにおける変速制御に適用する。
【0043】
すなわち、通常モードにおいて変速ペダル7bの踏込に対応して記憶による上記出力値Bから比例ソレノイドバルブ22へ出力を始めることにより、ペダル操作と対応して走行動作が開始されることから、変速ペダル7bを踏んでもなかなか発進しないなどのモタツキを抑制することができる。
【0044】
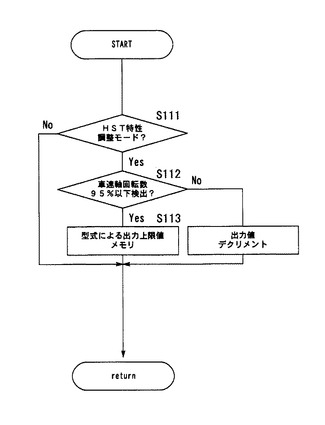
また、図21に制御処理例12のフローチャートを示すように、調整モードの場合(S111)において、出力回転数が上限となる飽和状態から比例ソレノイド駆動電流を少しずつ減少させていき、車速軸回転数が閾値(例えば、飽和回転数の95%)以下を検出した時の出力値I1をメモリーする制御処理(S112,S113)を構成する。このメモリーされた出力値I1を上限として通常モードにおける出力値を規制することにより、本機の型式により、特に減速比が高速となる小型機について、車速が超過する事態を回避することができる。
【0045】
また、油温上昇の際の出力規制のために、前記同様にして、調整モードの場合において車速軸回転数が閾値(例えば、飽和回転数点の85%)以下を検出した時の出力値I2をメモリーする。このメモリーされた出力値I2を通常モードにおける作動油の昇温規制(例えば、105℃)の際の上限として適用することにより、無段変速機構11への負荷が低減されて油温上昇による無段変速機構11の損傷を防止することができる。
【0046】
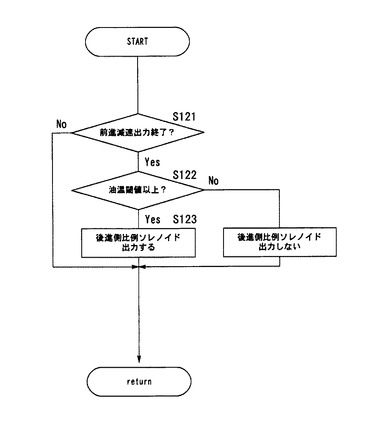
次に、油温対応の減速制御について説明すると、図22に制御処理例13のフローチャートを示すように、前進走行時の変速ペダル7bの戻し操作によって停止する際の前進減速出力終了(S121)の後に、油温が閾値(例えば、70℃)以上になったときに限り、後進側の比例ソレノイドバルブ22に断続出力(例えば、50msの出力を2s周期で断続)する制御処理(S122,S123)を構成することにより、変速ペダル7bから足を離して減速したときに、トラニオン軸21tが後進側となって微速後退動作する低油温特有の問題を解消して安全に停止状態を保つことができる。
【0047】
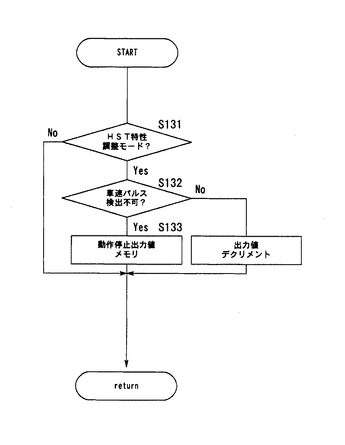
また、図23に制御処理例14のフローチャートを示すように、調整モードの場合(S131)において、上掲の図19に比例ソレノイドの駆動電流と車速軸の出力回転数の特性図を示すように、比例ソレノイド駆動電流を少しずつ減少させていき、車速パルスの検出が終了した時の出力値Cをメモリーする制御処理(S132,S133)を構成し、このメモリーされた出力値Cを停止動作点として通常モードにおける変速制御に適用する。
【0048】
すなわち、通常モードにおいて変速ペダル7bの踏込の解除による比例ソレノイドへの出力を落としていく際に記憶による上記出力値Cの時点で比例ソレノイドバルブ22への出力をオフすることにより、ペダル操作と対応して走行が停止されることから、変速ペダル7bを解除してもなかなか停止しないなどのモタツキを抑制することができる。
【0049】
(副変速対応)
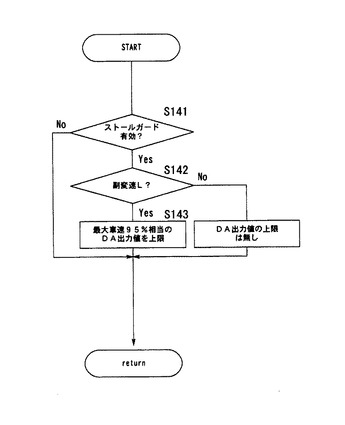
次に、副変速対応の制御処理について説明すると、図24に制御処理例15のフローチャートを示すように、ストールガード機能(S141)として副変速レバー7dのポジションが作業速Lの時に比例ソレノイドバルブ22への出力の上限値を最大車速が95%になる時の値とする制御処理(S142,S143)を構成する。上記制御処理により、ローダ等の高負荷作業に適用する作業速Lのポジションでは、過大な負荷を受けても比例ソレノイドの駆動電流の上限規制によりエンストしにくくなり、ストールガード機能の精度を向上することができる。
【0050】
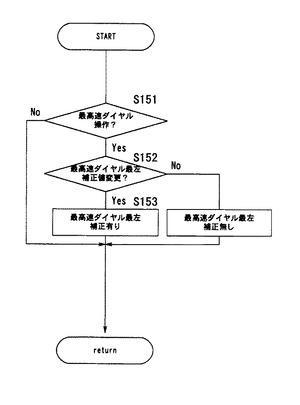
最高速設定ダイヤル9aについては、設定範囲の下限が上限の設定値の50%として構成されており、その下限値の取扱について、図25に制御処理例16のフローチャートを示すように、最高速設定ダイヤル9aを操作した場合(S151)に、外部通信機器による設定範囲の下限値の補正であれば±10%の範囲で補正可能に制御処理(S152,S153)を構成する。このような制御処理により、HSTの個別の特性差や油温の影響で下限値にズレが生じても、チェッカー等の外部通信機器を用いて補正をかけることで、最高速設定ダイヤル9aによる最大車速を下限に設定した場合に、設計値通りに低下することができる。
【0051】
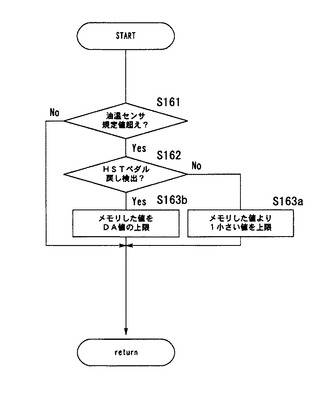
次に、比例ソレノイドのヒステリシスを考慮した出力値の上限規制について説明する。調整モードにより、出力回転数が上限となる飽和状態から比例ソレノイド駆動電流を少しずつ減少させていき、車速軸回転数が閾値(例えば、飽和回転数の85%)以下を検出した時の出力値(例えば、150)をメモリーし、図26に制御処理例17のフローチャートを示すように、油温センサーが規定値(例えば、105℃)を越えた時(S161)に、上記メモリーされた値より僅かに小さい値(例えば、149)を出力値の上限(S163a)として通常モードにおける出力値を規制し、変速ペダル7bを50%以上戻した後は、メモリーした値を出力値の上限(S162,S163b)として規制をかける。
【0052】
上記制御処理により、変速ペダル7bを踏込んだ状態において油温センサーが上昇した場合に、メモリーした値にて出力値に規制をかけた時および、変速ペダル7bを再度踏込んでそのメモリーした値にて出力値に規制をかけた時について、比例ソレノイドのヒステリシスを補うように出力値を調節することによって実車速をほぼ同じに揃えることができるので、同じ出力値による出力規制の場合に比例ソレノイドのヒステリシスによって実車速にズレが生じるという問題を解消することができる。
【0053】
(後進側上限規制)
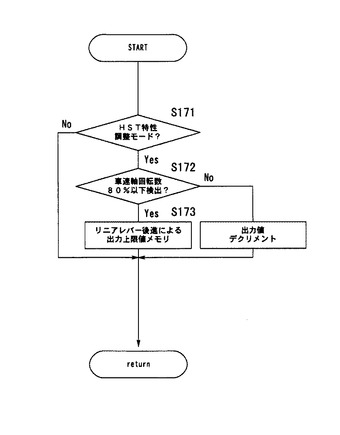
後進時の上限規制は、図27に制御処理例18のフローチャートを示すように、後進側の調整モードにおいて(S171)飽和状態から比例ソレノイド駆動電流を少しずつ減少させていき、車速軸回転数が閾値(例えば、飽和回転数の80%)以下を検出した時の出力値をメモリー(S172,S173)し、このメモリーした値を通常モードにおいて前後進レバー7iが後進の時に出力値の上限として規制をかけることにより、実際に車速軸回転数が落ちる出力点で上限規制がかけられるので、後進時の車速オーバーを抑制することができる。
【0054】
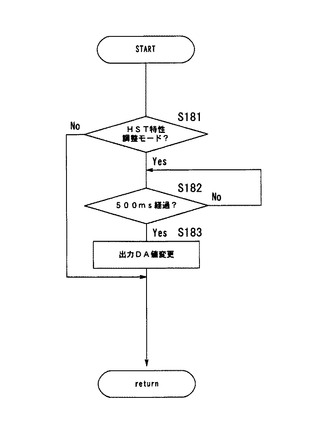
無段変速機構11の特性調整については、図28に制御処理例19のフローチャートを示すように、調整モードにおいて(S181)、比例ソレノイドへの電流値を飽和点より少しずつ増加または減少させていく際に、出力電流値を一定の間隔(例えば、500ms毎)に一定値(例えば、1)ずつ順次変更(S182,S183)することにより、1秒毎に出力電流値を変更を行う場合より無段変速機構11の特性調整に多くの時間を要しないので、工場におけるスムーズな出荷工程を実現することができる。
【0055】
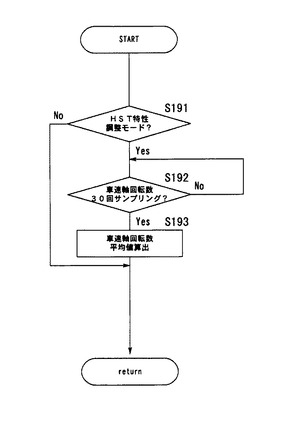
車速軸回転数の検出については、図29に制御処理例20のフローチャートを示すように、調整モードにおいて(S191)、比例ソレノイドへの電流値を飽和点まで上昇させてその時の車速軸回転数を検出する際に、一定間隔(例えば、100ms)毎に一定回数(例えば、30回)のサンプリング(S192)による車速軸回転数の平均値を算出(S193)することにより、高回転によるバラツキの影響を抑えて正しい車速回転数を検出することができるので、油温制御や型式による車速規制について、設計値に沿って実施精度を向上させることができる。
【0056】
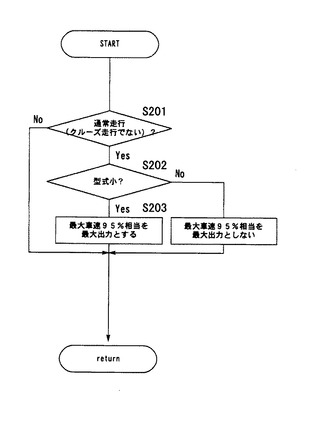
走行伝動系の減速比の差の取扱いについては、図30に制御処理例21のフローチャートを示すように、ミッションの減速比において型式大のものと異なる型式小のものについて(S201,S202)、比例ソレノイドへの最大出力(飽和点)を最大車速が95%になる時の値とする(S203)ことにより、減速比の差を補って最大車速を型式大のものと同等にしてHST出力軸の制御を共通に取扱うことができる。
【0057】
(補足制御)
以上に述べた制御処理に加え、次の制御処理を構成することができる。
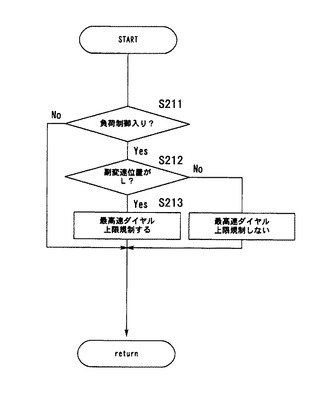
負荷制御については、図31に制御処理例22のフローチャートを示すように、負荷制御スイッチがオンで、副変速12が「作業」の場合(S211,S212)に、最高速設定ダイヤル9aの操作量に上限値(例えば、95%)を設ける制御処理(S213)を構成することにより、ローダ作業等の高負荷作業について最高速に上限規制をかけてトラニオン角を最大まで開かないようにすることで、エンストによる作業中断を回避することができる。
【0058】
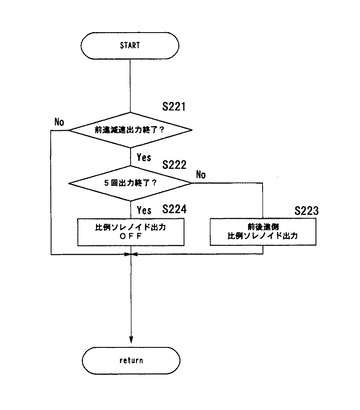
前進走行中の変速ペダル7b戻し(踏込み操作解除)による減速制御については、図32に制御処理例23のフローチャートを示すように、前進走行時の変速ペダル7bの戻し(踏込み操作解除)操作によって停止する際の前進減速出力終了(S221)の後に、比例ソレノイドバルブ22に一定時間(例えば、50ms)ずつ後進側と前進側に出力を5回繰返し(S222,S223)てから出力をオフ(S224)する制御処理を行う構成とする。これにより、前進走行時に変速ペダル7bから足を離して減速しても、トラニオン軸21tが中立位置まで戻りきらずに微速動作する事態を解消して安全に停止状態を保つことができる。
【0059】
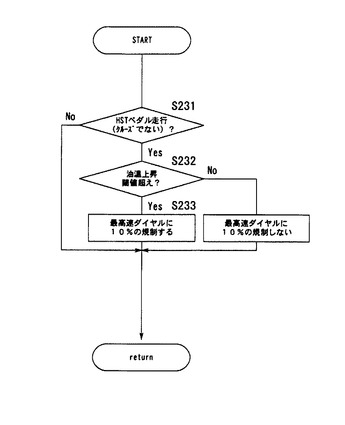
作動油の温度上昇対応の制御については、図33に制御処理例24のフローチャートを示すように、変速ペダル7bによる走行の場合(S231)において、油温が上昇して閾値(例えば、105℃)を越えた時に、最高速設定ダイヤル9aによる上限速度について所定の規制(例えば、10%)を行う制御処理(S232,S233)を構成する。上記制御処理により、比例ソレノイドバルブ22への出力を規制して負荷を抜くことで油温上昇によるHSTの焼損を防止することができる。
【0060】
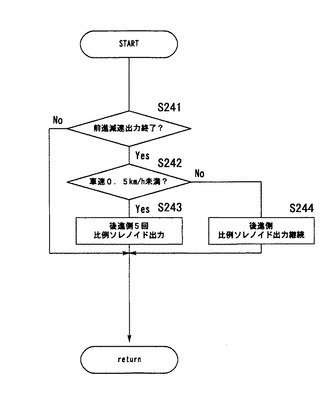
前進走行中の変速ペダル7b戻し(踏込み操作解除)による別の減速制御については、図34に制御処理例23のフローチャートを示すように、前進走行時の変速ペダル7bの戻し(踏込み操作解除)操作によって停止する際の前進減速出力終了(S241)の後に、車速が閾値(例えば、0.1〜0.2km/h)未満になったときに、後進側の比例ソレノイドバルブ22の一定時間(例えば、50ms)駆動を一定周期(例えば、2s)で5回繰返し(S242,S243)、また、減速後の車速が上記閾値以上の範囲で、上記繰返しを継続する(S244)制御処理を構成することにより、前進走行中に変速ペダル7bから足を離して減速しても、トラニオン軸21tが中立位置まで戻りきらずに微速動作する事態を解消して安全に停止状態を保つことができる。
【0061】
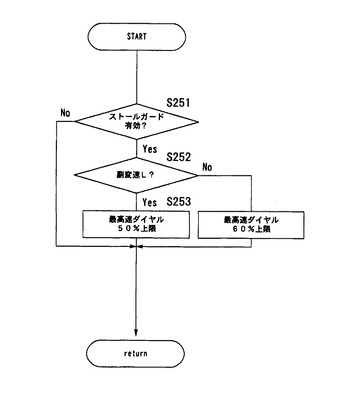
最高速設定ダイヤル9aは、副変速レバー7dのポジションによって設定可能な上限が規制され、ポジションが作業速Lの場合は上限が60%に規制され、この副変速レバー7dとの関係については、図35に制御処理例24のフローチャートを示すように、ストールガード機能(S251)として副変速レバー7dのポジションが作業速Lであればエンジン回転が低下した時に最高速設定ダイヤル9aの上限を50%に切替える制御処理(S252,S253)を構成することにより、ローダ作業等による高負時に上限規制をかけることができるので、ストールガード機能の精度を向上することができる。
【0062】
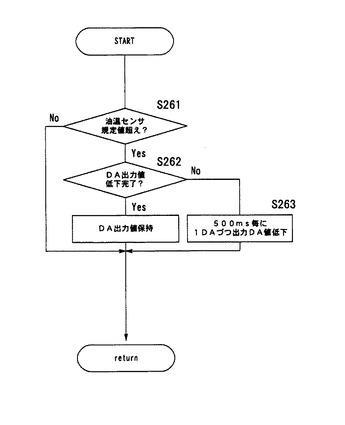
油温上昇時の上限規制については、図36に制御処理例25のフローチャートを示すように、油温センサが規定値(例えば、105℃)を超過した場合(S261)に、比例ソレノイドへの出力値の上限規制のために、メモリーした値(例えば、85%)に変更する際に、その値まで所定時間(例えば、500ms)毎に一定値ずつ出力値を低減する制御処理(S262,S263)を構成することにより、規制によって急激に電流値を変更するとトラニオンが戻りすぎて過大な車速低下を招くので、その変化を緩和することにより、過大な車速低下を回避することができる。
【符号の説明】
【0063】
1 作業車両
4 エンジン
5 変速装置
7b 変速ペダル
7c ブレーキペダル
7d 副変速レバー
9c クルーズコントロールスイッチ
9b 感度設定具(レスポンスコントロールダイヤル)
9a 最高速設定ダイヤル
11 無段変速機構
12 副変速機構
12p 副変速レバーセンサ
13 伝動機構
21p 油圧ポンプ
21m 定量油圧モータ
22 比例ソレノイドバルブ
33 前後進レバーセンサ
A 飽和出力値
B 発進出力値
C 停止出力値
P 制御部
【技術分野】
【0001】
本発明は、ペダル操作対応で無段で自動変速する作業車両に関するものである。
【背景技術】
【0002】
特許文献1の無段変速式作業車両は、静油圧式無段変速機構を備えて変速ペダル操作対応のトラニオン動作制御により自動変速させる変速制御装置を備える。この変速制御装置は、無段変速機構の変速の際のトラニオン動作について、その目標位置と動作位置との偏差に応じて追従動作速度をマップデータにより切替えることにより、前進時と後進時のそれぞれの変速制御感度を任意に設定することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−270607号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記作業車両は、無段変速機構の変速時の追従動作が低速になるように変速制御感度を設定した場合は、急増速によるショックを抑えることができるものの、踏込んだ変速ペダルの解除操作時においても、停止車速まで徐々に減速することとなるので、緊急停止による対応が困難となるという問題があった。
【0005】
本発明の目的は、走行車速の変速制御感度の設定の自由度を確保しつつ、変速制御感度を低感度に設定した場合でも、緊急停止に対応可能とする変速制御システムを備えた無段変速式の作業車両を提供することにある。
【課題を解決するための手段】
【0006】
請求項1に係る発明は、停止車速を含む車速範囲を無段階に変速動作してエンジン動力を走行部に変速伝動する無段変速機構(11)と、この無段変速機構(11)を前後進の各走行方向について変速ペダル(7b)の踏込量に基づく目標変速比に変速制御する制御部(P)とを備える作業車両において、上記制御部(P)は、上記変速ペダル(7b)の操作に対する無段変速機構(11)の追従動作を規定するための感度設定具(9b)を備える構成とし、この感度設定具(9b)による設定感度が所定の標準感度より低感度の場合に、上記変速ペダル(7b)の踏込み後の解除操作について、上記標準感度で停止車速に変速制御することを特徴とする。
【0007】
請求項2に係る発明は、請求項1に係る発明において、前記感度設定具(9b)が前記標準感度より高感度の設定の場合に、変速ペダル(7b)の踏込量が所定の基準値以上の踏込み操作について、前記無段変速機構(11)を同標準感度で変速制御することを特徴とする。
【0008】
請求項3に係る発明は、請求項1又は請求項2のいずれかに係る発明において、前記感度設定具(9b)は、感度を設定するためのダイヤル範囲を最小から最大までの感度範囲と対応して備えるとともに、その最大感度のダイヤル位置を上記感度範囲外の所定の感度としたことを特徴とする。
【発明の効果】
【0009】
請求項1に係る発明により、制御部は、変速ペダルが踏込み操作されると、選択されている前後進の各走行方向について感度設定具による設定感度による追従動作位置に無段変速機構を変速制御し、また、標準感度より低感度の設定の場合は、変速ペダルが踏込みから解除操作されると、標準感度で停止車速に変速制御する。したがって、任意の感度設定を可能とする感度設定具によって低感度に設定した場合については、変速ペダルの踏込操作について増速ショックを抑えつつ踏込対応車速まで緩やかに追従増速され、その一方で、変速ペダルの解除操作に応じて速やかに停止車速まで追従減速されるので、急減速を要する事態に対応することができる。
【0010】
請求項2に係る発明により、請求項1に係る発明の効果に加え、感度設定具を高感度に設定した場合に、変速ペダルの踏込量が基準値未満であれば、設定の制御感度で無段変速機構が変速制御され、また、踏込量が基準値以上であれば、標準感度で変速制御される。したがって、高感度の設定の場合は、変速ペダルの踏込みが小さい操作のときに速やかに追従増速され、一方、踏込みが大きいときは通常の追従増速となるので、エンジン回転のハンチングを招くことなく、安定した増速が可能となる。
【0011】
請求項3に係る発明により、請求項1又は請求項2のいずれかに係る発明の効果に加え、感度設定具は、最小から最大までの感度範囲と対応するダイヤル範囲によって感度を設定することができるのみならず、その最大感度のダイヤル位置では、任意の感度を設定することができるので、通常範囲の感度による変速動作とそれを越える高感度制御による変速動作、即ち、急な加速を要する場合に有効となり、幅広い作業に対応することが可能となる。
【図面の簡単な説明】
【0012】
【図1】トラクタの全体構成の平面図
【図2】変速設定部の拡大図
【図3】走行伝動系の構成ブロック図
【図4】伝動系統の構成展開図
【図5】静油圧式の無段変速機構の内部構成と油圧回路図
【図6】変速制御システムの入出力ブロック図
【図7】制御処理例1のフローチャート
【図8】制御処理例2のフローチャート
【図9】制御処理例3のフローチャート
【図10】制御処理例4のフローチャート
【図11】制御処理例5のフローチャート
【図12】制御処理例6のフローチャート
【図13】ペダル操作とバルブ駆動電流の特性図
【図14】制御処理例7のフローチャート
【図15】最高速規制例の特性図
【図16】制御処理例8のフローチャート
【図17】制御処理例9のフローチャート
【図18】制御処理例10のフローチャート
【図19】比例ソレノイド駆動電流と車速軸出力回転数の特性図
【図20】制御処理例11のフローチャート
【図21】制御処理例12のフローチャート
【図22】制御処理例13のフローチャート
【図23】制御処理例14のフローチャート
【図24】制御処理例15のフローチャート
【図25】制御処理例16のフローチャート
【図26】制御処理例17のフローチャート
【図27】制御処理例18のフローチャート
【図28】制御処理例19のフローチャート
【図29】制御処理例20のフローチャート
【図30】制御処理例21のフローチャート
【図31】制御処理例22のフローチャート
【図32】制御処理例23のフローチャート
【図33】制御処理例24のフローチャート
【図34】制御処理例25のフローチャート
【図35】制御処理例26のフローチャート
【図36】制御処理例27のフローチャート
【発明を実施するための形態】
【0013】
上記技術思想に基づいて具体的に構成された実施の形態について以下に図面を参照しつつ説明する。
図1は、本発明の適用対象となる作業車両の一例として示すトラクタの全体構成平面図である。この作業車両1は、前後の走行車輪2,3によって圃場作業可能に機体を支持しており、機体の前部又は後部に作業機を装着して作業を行う。機体前部のエンジンルーム内に搭載しているエンジン4からの動力を受けて走行車輪2,3に動力伝達を行う。この走行車輪2,3への動力伝達は、変速装置5の副変速機構12(有段変速)と無段変速機構11で変速された動力が無段変速伝動されていく。また、無段変速機構11に入力された動力のうち無段変速されない動力がPTOと略称される作業動力供給部6に伝達されていく。作業動力供給部6は、機体後部のPTO機構16aと機体中央下部のPTO機構16bから構成されている。
【0014】
また、作業座席7を中心に、各種の機器操作具を備え、走行操作用として、ハンドル7a、変速ペダル7b、左右セットのブレーキペダル7c(連結解除により左ブレーキペダルと右ブレーキペダルとして使用)、副変速レバー7d、後輪駆動と4輪駆動を切り換える4WDレバー7e、エンジンを緊急停止する緊急停止スイッチ7f、ウィンカスイッチ7g、変速設定部7h、作業機操作用として、リヤとミッドのPTOレバー8a,8b、装着している作業機の昇降位置を決定するポジションレバー8c、前後進レバー7i、エンジン回転数を設定するスロットルレバー7j、別の油圧機器を駆動する2連の外部油圧レバー8d等を備えて構成される。前記副変速レバー7dは、図4に示す有段変速の副変速機構12の変速操作を行うもので、3段変速が可能な構成となっている。
【0015】
前記変速設定部7hには、図2に拡大図を示すように、最高速設定ダイヤル9a、レスポンスコントロールダイヤル9b、クルーズコントロールスイッチ9cが配置される。
最高速設定ダイヤル9aは、車体の最高速を決定するものであり、最高速が決定されると変速ペダル7bを最大まで踏み込んでも決定された最高速までしか出ない構成としている。
レスポンスコントロールダイヤル9bは、後述しているように、変速ペダル7bを踏んで目標車速まで加速する場合において、目標車速までの到達時間を短くしたり早くしたりする構成としている。
クルーズコントロールスイッチ9cを入り状態にすると、変速ペダル7bの操作を止めても入り状態にした時点の速度を維持し続ける構成である。
【0016】
上記変速装置5による走行伝動系は、図3に構成ブロック図を示すように、エンジン動力を受けるHSTと略称される静油圧式の無段変速機構11および車速域を切替える副変速機構12を動力伝達上流側から下流側にかけて直列に配置し、後輪3等の伝動機構13に伝動する。この走行伝動系に、エンジン4の回転センサ4r、無段変速機構11の出力回転センサ11r、副変速機構12の出力回転センサ12r等による機器動作センサを設け、変速ペダル7b等の変速操作具に基づいて無段変速機構11を制御する制御部Pとにより変速システムを構成する。
【0017】
変速装置5は、図4に伝動系統展開図を示すように、無段変速機構11、副変速機構12、後輪伝動機構13、前輪伝動機構14に至る4WD切替部14a等による走行系機器を備えている。作業速から路上速の範囲で車速域を選択する副変速機構12による各車速域について無段変速機構11で無段変速し、この変速動力を前後輪2,3に伝動出力している。また、エンジン4から無段変速機構11に入力された動力のうち、無段変速されない動力がPTOクラッチ15を経てリヤとミッドのPTO機構16a,16bから作業機を作動可能に構成している。即ち、無段変速機構11に入力されたエンジン4からの出力軸21aは、エンジン4と反対側(変速装置5側)に突出しており、複数のギアを介してPTOクラッチ15へと動力伝達されている構成である。これにより、リヤPTO機構16aとミッドPTO機構16bは、一定回転で回転する構成となる。
【0018】
11aは無段変速機構11のチャージポンプであり、変速装置5を囲うトランスミッションケース内に内装している。リヤPTO機構16aは、機体後部に装着するロータリー、除雪機、モーア等を駆動する。ミッドPTO機構16bは、前輪2と後輪3との間の機体下部に装着するモーア、除雪機、路上清掃機等を駆動する。
【0019】
無段変速機構11は、図5に内部構成と油圧回路図を示すように、エンジン動力によって駆動される出力可変式の油圧ポンプ21pとそのポンプ出力を受ける定量油圧モータ21mとによって構成される。油圧ポンプ21pは、エンジン4からの出力軸21aと直結で駆動される。油圧ポンプ21pは出力調整用のトラニオン軸21tが構成され、このトラニオン軸21tの回動で斜板21sの角度が変化する。斜板21sの角度位置により作動油の送油方向および出力停止を含む流量調節を介して定量油圧モータ21mを駆動し、その出力軸21bから出力停止の中立を含む正逆の変速回転動力を伝動出力する。油圧ポンプ21pのトラニオン角制御は、サーボ機構のHST制御により、比例ソレノイドバルブ22の正逆の方向別の駆動電流によって作動油流量を調節し、電流値に応じた回動位置にトラニオン軸21tを制御する。符号Pはパワーステアリングの油圧回路を示している。
【0020】
変速制御システムは、図6に入出力ブロック図を示すように、変速ペダル7bのペダルセンサ31、感度設定具であるレスポンスコントロールダイヤル9b、最高速設定ダイヤル9a、前後進レバー7iの前進又は後進位置を検出する前後進レバーセンサ33、クルーズコントロールスイッチ9c、副変速レバーセンサ12p、ブレーキペダルセンサ34、HST回転センサ11r、エンジン回転センサ4r、車速センサ12r等の各信号を制御部Pに入力し、比例ソレノイドバルブ22を感度設定具9bのダイヤル位置に対応するテーブルデータに基づいて前後進の方向別に電流制御可能に構成する。機体を走行させるときには、前後進レバー7iで前進又は後進を選択し、変速ペダル7bを踏み込み操作することで走行を開始する。
【0021】
このように、無段変速式作業車両は、停止車速を含む車速範囲を無段階に変速動作してエンジン動力を走行部2,3に変速伝動する無段変速機構11と、この無段変速機構11を前後進の各走行方向について変速ペダル7bの踏込量に基づく目標変速比に変速制御する制御部Pとによる制御システムを備えて構成されている。制御部Pには、ダイヤル式の感度設定具9bにより感度信号を受け、標準感度を中心に低感度から高感度の所定の範囲でダイヤル位置に対応して変速ペダル7bの踏込み操作に対する無段変速機構11の追従動作を緩急に調節することができる。具体的には、変速ペダル7bを踏み込み操作すると、ペダルセンサ31で目標車速が決定され、この目標車速が出るようにトラニオン軸21tを目標位置まで回動するが、トラニオン軸21tを目標位置まで回動させる時間を早くしたり遅くしたりする。その後、車速センサ12rによる検出値をフィードバックして、目標車速から外れている場合はトラニオン軸21tを再び回動して調整する。
【0022】
(走行変速制御)
上記変速システムによる具体的な変速制御として、感度設定具9bが標準感度より低感度の設定の場合について説明すると、変速ペダル7bの踏込み後の解除操作でトラニオン軸21tを中立位置に戻す場合において、ゆっくり戻すと減速に時間がかかってしまう。そこで、図7の制御処理例1のフローチャートを示すように、減速の判定の第1の処理ステップ(以下において、「S1」の如く略記する。)により、該当する場合は、感度設定具9bの設定感度が所定の標準感度より低感度の場合に限り、上記標準感度で停止車速になるようにトラニオン軸21tを回動して変速制御する制御処理(S2,S3)を行う構成とする。
【0023】
上記変速制御により、制御部Pは、変速ペダル7bが踏込み操作されると、選択されている前後進の各走行方向について感度設定具9bによる設定感度による追従動作位置に無段変速機構11を変速制御し、標準感度より低感度の設定の場合については、変速ペダル7bが踏込みから解除操作されると、標準感度で停止車速に変速制御する。したがって、任意の感度設定を可能とする感度設定具9bによって低感度に設定した場合は、変速ペダル7bの踏込操作について増速ショックを抑えて緩やかに踏込対応車速まで追従増速され、その一方で、変速ペダル7bの解除操作に応じて速やかに停止車速まで追従減速されるので、急減速を要する事態に対応することができる。
【0024】
次に、感度設定具9bが標準感度より高感度の設定の場合の変速制御は、図8に制御処理例2のフローチャートを示すように、変速ペダル7bの踏込量が所定の基準値(例えば、50%)以上の踏込み操作(S11,S12)について、前進増速時または後進増速時に、標準感度で変速制御する制御処理(S13,S14)を構成する。
【0025】
上記制御処理により、感度設定具9bを高感度に設定した場合に、変速ペダル7bの踏込量が基準値未満であれば、設定の動作感度で無段変速機構11が設定による高感度で変速制御され、また、踏込量が基準値以上であれば、標準感度で変速制御される。したがって、高感度の設定の場合は、変速ペダルの踏込みが小さい操作のときに速やかに追従増速され、一方、踏込みが大きいときは通常の追従増速となるので、エンジン回転のハンチングを招くことなく、安定した増速が可能となる。
【0026】
次に、前進走行におけるブレーキ操作の際の変速制御について説明する。
従来は、左右の両ブレーキペダル7cの操作に対応して少しずつ比例ソレノイドバルブ22への出力を落としていったときに、車速がほぼ停止状態であっても比例ソレノイドバルブ22への出力が継続していると、ブレーキペダル7cの踏込み解除によって微速走行することがあるので、このような不安定状態を解消するために、図9に制御処理例3のフローチャートを示すように、走行中において左右の両ブレーキペダル7cを同時踏込み操作が判定された場合(S21)に、車速が停止速近傍の所定の閾値(例えば、0.5km/h)以下になった時点で、比例ソレノイドバルブ22への出力を即時オフする制御処理(S22,S23)を構成する。
【0027】
上記制御処理により、ブレーキ操作と対応する減速動作により所定の閾値による略停止状態まで減速された時点で無段変速機構11のトラニオン軸21tが中立位置に復帰して回転出力が停止されるので、ブレーキペダル7cから足を離したときに、安全に停止状態を保つことができる。
【0028】
また、後進側減速時の変速制御については、図10に制御処理例4のフローチャートを示すように、比例ソレノイドバルブ22が後進側駆動の場合(S31)の減速時に限り(S32)、感度設定具9bのレンジによって予め設定されている比例ソレノイドバルブ22の駆動電流を変更するタイミングを全てのレンジにおいて一定時間(例えば、10ms)遅らせたテーブルデータによって減速する制御処理(S33)を構成する。
【0029】
一般に、無段変速機構の後進側にオリフィスがあってブレーキ圧が起ちやすく、後進側の減速がきつくなる特性を有する無段変速機構について、上記制御処理により、後進走行時の減速動作のタイミングの遅れによって前進側の減速に比べてきつくなくなることから、後進側の走行フィーリングを改善することができる。
【0030】
また、後進側の減速中の前後進レバー7i操作時の変速制御については、図11に制御処理例5のフローチャートを示すように、比例ソレノイドバルブ22が後進側の減速中である場合(S41,S42)に、逆方向の前進側にリニアレバーとも略称される前後進レバー7iが操作された時に以後の後進側減速動作について、前進側と同じテーブルデータを適用する制御処理(S43,S44)を構成することにより、後進走行時に変速ペダル7bを踏んだまま前後進レバー7iが前進に操作された場合に前進走行時と同様に減速制御されることから、前記の如くのタイミング遅れ制御による前進への切替え遅れが回避されるので、走行フィーリングを向上することができる。
【0031】
次に、感度設定具による特別の感度設定について説明する。
感度設定具9bは、感度を設定するためのダイヤル範囲を最小から最大までの感度範囲と対応させ、その最大感度となる一側端のダイヤル位置で、最大感度を越える所定の特別感度(例えば、最大感度の2倍の感度)を設定可能に目盛表示して構成する。
【0032】
このように構成した感度設定具9bのダイヤル位置がダイヤル範囲の一端の最大感度位置に設定された場合の具体的な制御は、図12に制御処理例6のフローチャートを示すように、比例ソレノイドバルブ22が前後進の駆動(S51)の場合に、感度設定具9bのダイヤル位置が最大感度位置であればその設定感度を1ビットの目盛単位を2ビットとして最大感度の2倍の感度とする制御処理(S52,S53)を構成する。
【0033】
上記制御処理により、感度設定具9bは、最小から最大までの感度範囲と対応するダイヤル範囲によって感度を設定することができるのみならず、その最大感度のダイヤル位置では、更に高い特定の感度を設定することができるので、通常範囲の感度による変速動作とそれを越える特別感度の変速動作により、幅広い作業に対応することが可能となる。
【0034】
次に、機器の個別特性対応の制御処理について説明する。
一般に、無段変速機構11の動作について、その動作制御用の比例ソレノイドバルブ22の駆動電流との関係の個体差により、作業車両は、本機が動き出すときの変速ペダル7bの踏込量に個体差が生じる。このような問題に対し、個別特性に基づいて算出したバルブ駆動電流によって動作制御することにより、ペダル操作と対応する変速動作を共通化することができる。
【0035】
具体的には、図13にペダル操作とバルブ駆動電流の特性図を示すように、本機が停止状態から動き出す時Bの比例ソレノイドバルブ22への出力値、本機が動いている状態から停止する時Cの比例ソレノイドバルブ22への出力値、出力増加によっても速度が上限となる飽和時Aの比例ソレノイドバルブ22への出力値の3点を計測してEEPROMに個々の特性として記憶し、これら3点から変速ペダル7bの操作量に応じて算出される出力値によって無段変速機構11を制御する。
【0036】
上記特性差を踏まえた無段変速機構11の制御は、図14に制御処理例7のフローチャートを示すように、変速ペダル7bによる走行の場合(S61)において、ペダル操作の検出に応じて目標のバルブ駆動電流を算出(S62,S63)する制御処理を構成することにより、個体差によるバラツキを吸収してどの機械でも同様な動作を可能にすることができる。
【0037】
次に、高負荷を受けた場合の変速制御は、最高速設定ダイヤル9aによって比例ソレノイドへの出力を60%以下の範囲に規制する図15の特性図による最高速規制例と同様に制御する。すなわち、制御処理例8のフローチャートを図16に示すように、変速ペダル7bによる走行の場合(S71)において、負荷の増加によってエンジン回転数の低下を検出した時に、比例ソレノイドバルブ22への出力に規制をかける制御処理(S72,S73)を構成する。
【0038】
上記制御処理により、負荷がかかりやすい作業において、バルブ駆動電流を規制することにより、エンストなしに作業の円滑な継続が可能となるので、急な上り坂で無段変速機構11に負荷がかかってエンストすることにより危険を招く事態等を回避することができる。
【0039】
次に、前進走行中のペダル戻し時の減速制御について説明すると、図17に制御処理例9のフローチャートを示すように、変速ペダル7bによる走行の場合(S81)において、前進走行時の変速ペダル7bの戻し操作によって停止する際の前進減速出力終了(S82)の後に、比例ソレノイドバルブ22に一定時間(例えば、50ms)の後進側出力につき一定周期(例えば、2s)の繰返しを5回行う制御処理(S83)を構成することにより、前進走行時に変速ペダル7bから足を離して減速しても、トラニオンが中立位置まで戻りきらずに微速動作する事態を解消して安全に停止状態を保つことができる。
【0040】
次に、変速ペダル7bの踏込みが小さい場合(例えば、踏込量が25%以下)において感度設定具9bによる感度を反映する変速制御は、図18に制御処理例10のフローチャートを示すように、比例ソレノイドバルブ22への出力の小さい範囲に限り(S91)、前進増速を除く変速について更に一定時間(例えば、10ms)を遅延する制御処理(S92,S93)を構成することにより、前進の減速、後進の増減速における走行ショックが緩和されて走行フィーリングを改善することができる。
【0041】
(調整モード)
次に、無段変速機構11の特性を記憶させる調整モードの制御処理について説明する。
無段変速機構11の特性は、図19に比例ソレノイドの駆動電流と車速軸の出力回転数の特性図を示すように、前進側と後進側のそれぞれについて、発進点Bから飽和点Aまでの電流増加によって回転数が上限に達した後、電流減少によって停止点Cに至るヒステリシスを示し、また、電流と回転数特性及び最大出力は、供給圧力と関与する部品によって一定のバラツキ幅を有する。
【0042】
上記特性を有する無段変速機構11の制御のために、図20に制御処理例11のフローチャートを示すように、調整モードの場合(S101)において、比例ソレノイド駆動電流を少しずつ増加させていき、車速パルスの検出が始まった時の出力値Bをメモリー(S102,S103)する制御処理を構成し、このメモリーされた出力値Bを開始動作点として通常モードにおける変速制御に適用する。
【0043】
すなわち、通常モードにおいて変速ペダル7bの踏込に対応して記憶による上記出力値Bから比例ソレノイドバルブ22へ出力を始めることにより、ペダル操作と対応して走行動作が開始されることから、変速ペダル7bを踏んでもなかなか発進しないなどのモタツキを抑制することができる。
【0044】
また、図21に制御処理例12のフローチャートを示すように、調整モードの場合(S111)において、出力回転数が上限となる飽和状態から比例ソレノイド駆動電流を少しずつ減少させていき、車速軸回転数が閾値(例えば、飽和回転数の95%)以下を検出した時の出力値I1をメモリーする制御処理(S112,S113)を構成する。このメモリーされた出力値I1を上限として通常モードにおける出力値を規制することにより、本機の型式により、特に減速比が高速となる小型機について、車速が超過する事態を回避することができる。
【0045】
また、油温上昇の際の出力規制のために、前記同様にして、調整モードの場合において車速軸回転数が閾値(例えば、飽和回転数点の85%)以下を検出した時の出力値I2をメモリーする。このメモリーされた出力値I2を通常モードにおける作動油の昇温規制(例えば、105℃)の際の上限として適用することにより、無段変速機構11への負荷が低減されて油温上昇による無段変速機構11の損傷を防止することができる。
【0046】
次に、油温対応の減速制御について説明すると、図22に制御処理例13のフローチャートを示すように、前進走行時の変速ペダル7bの戻し操作によって停止する際の前進減速出力終了(S121)の後に、油温が閾値(例えば、70℃)以上になったときに限り、後進側の比例ソレノイドバルブ22に断続出力(例えば、50msの出力を2s周期で断続)する制御処理(S122,S123)を構成することにより、変速ペダル7bから足を離して減速したときに、トラニオン軸21tが後進側となって微速後退動作する低油温特有の問題を解消して安全に停止状態を保つことができる。
【0047】
また、図23に制御処理例14のフローチャートを示すように、調整モードの場合(S131)において、上掲の図19に比例ソレノイドの駆動電流と車速軸の出力回転数の特性図を示すように、比例ソレノイド駆動電流を少しずつ減少させていき、車速パルスの検出が終了した時の出力値Cをメモリーする制御処理(S132,S133)を構成し、このメモリーされた出力値Cを停止動作点として通常モードにおける変速制御に適用する。
【0048】
すなわち、通常モードにおいて変速ペダル7bの踏込の解除による比例ソレノイドへの出力を落としていく際に記憶による上記出力値Cの時点で比例ソレノイドバルブ22への出力をオフすることにより、ペダル操作と対応して走行が停止されることから、変速ペダル7bを解除してもなかなか停止しないなどのモタツキを抑制することができる。
【0049】
(副変速対応)
次に、副変速対応の制御処理について説明すると、図24に制御処理例15のフローチャートを示すように、ストールガード機能(S141)として副変速レバー7dのポジションが作業速Lの時に比例ソレノイドバルブ22への出力の上限値を最大車速が95%になる時の値とする制御処理(S142,S143)を構成する。上記制御処理により、ローダ等の高負荷作業に適用する作業速Lのポジションでは、過大な負荷を受けても比例ソレノイドの駆動電流の上限規制によりエンストしにくくなり、ストールガード機能の精度を向上することができる。
【0050】
最高速設定ダイヤル9aについては、設定範囲の下限が上限の設定値の50%として構成されており、その下限値の取扱について、図25に制御処理例16のフローチャートを示すように、最高速設定ダイヤル9aを操作した場合(S151)に、外部通信機器による設定範囲の下限値の補正であれば±10%の範囲で補正可能に制御処理(S152,S153)を構成する。このような制御処理により、HSTの個別の特性差や油温の影響で下限値にズレが生じても、チェッカー等の外部通信機器を用いて補正をかけることで、最高速設定ダイヤル9aによる最大車速を下限に設定した場合に、設計値通りに低下することができる。
【0051】
次に、比例ソレノイドのヒステリシスを考慮した出力値の上限規制について説明する。調整モードにより、出力回転数が上限となる飽和状態から比例ソレノイド駆動電流を少しずつ減少させていき、車速軸回転数が閾値(例えば、飽和回転数の85%)以下を検出した時の出力値(例えば、150)をメモリーし、図26に制御処理例17のフローチャートを示すように、油温センサーが規定値(例えば、105℃)を越えた時(S161)に、上記メモリーされた値より僅かに小さい値(例えば、149)を出力値の上限(S163a)として通常モードにおける出力値を規制し、変速ペダル7bを50%以上戻した後は、メモリーした値を出力値の上限(S162,S163b)として規制をかける。
【0052】
上記制御処理により、変速ペダル7bを踏込んだ状態において油温センサーが上昇した場合に、メモリーした値にて出力値に規制をかけた時および、変速ペダル7bを再度踏込んでそのメモリーした値にて出力値に規制をかけた時について、比例ソレノイドのヒステリシスを補うように出力値を調節することによって実車速をほぼ同じに揃えることができるので、同じ出力値による出力規制の場合に比例ソレノイドのヒステリシスによって実車速にズレが生じるという問題を解消することができる。
【0053】
(後進側上限規制)
後進時の上限規制は、図27に制御処理例18のフローチャートを示すように、後進側の調整モードにおいて(S171)飽和状態から比例ソレノイド駆動電流を少しずつ減少させていき、車速軸回転数が閾値(例えば、飽和回転数の80%)以下を検出した時の出力値をメモリー(S172,S173)し、このメモリーした値を通常モードにおいて前後進レバー7iが後進の時に出力値の上限として規制をかけることにより、実際に車速軸回転数が落ちる出力点で上限規制がかけられるので、後進時の車速オーバーを抑制することができる。
【0054】
無段変速機構11の特性調整については、図28に制御処理例19のフローチャートを示すように、調整モードにおいて(S181)、比例ソレノイドへの電流値を飽和点より少しずつ増加または減少させていく際に、出力電流値を一定の間隔(例えば、500ms毎)に一定値(例えば、1)ずつ順次変更(S182,S183)することにより、1秒毎に出力電流値を変更を行う場合より無段変速機構11の特性調整に多くの時間を要しないので、工場におけるスムーズな出荷工程を実現することができる。
【0055】
車速軸回転数の検出については、図29に制御処理例20のフローチャートを示すように、調整モードにおいて(S191)、比例ソレノイドへの電流値を飽和点まで上昇させてその時の車速軸回転数を検出する際に、一定間隔(例えば、100ms)毎に一定回数(例えば、30回)のサンプリング(S192)による車速軸回転数の平均値を算出(S193)することにより、高回転によるバラツキの影響を抑えて正しい車速回転数を検出することができるので、油温制御や型式による車速規制について、設計値に沿って実施精度を向上させることができる。
【0056】
走行伝動系の減速比の差の取扱いについては、図30に制御処理例21のフローチャートを示すように、ミッションの減速比において型式大のものと異なる型式小のものについて(S201,S202)、比例ソレノイドへの最大出力(飽和点)を最大車速が95%になる時の値とする(S203)ことにより、減速比の差を補って最大車速を型式大のものと同等にしてHST出力軸の制御を共通に取扱うことができる。
【0057】
(補足制御)
以上に述べた制御処理に加え、次の制御処理を構成することができる。
負荷制御については、図31に制御処理例22のフローチャートを示すように、負荷制御スイッチがオンで、副変速12が「作業」の場合(S211,S212)に、最高速設定ダイヤル9aの操作量に上限値(例えば、95%)を設ける制御処理(S213)を構成することにより、ローダ作業等の高負荷作業について最高速に上限規制をかけてトラニオン角を最大まで開かないようにすることで、エンストによる作業中断を回避することができる。
【0058】
前進走行中の変速ペダル7b戻し(踏込み操作解除)による減速制御については、図32に制御処理例23のフローチャートを示すように、前進走行時の変速ペダル7bの戻し(踏込み操作解除)操作によって停止する際の前進減速出力終了(S221)の後に、比例ソレノイドバルブ22に一定時間(例えば、50ms)ずつ後進側と前進側に出力を5回繰返し(S222,S223)てから出力をオフ(S224)する制御処理を行う構成とする。これにより、前進走行時に変速ペダル7bから足を離して減速しても、トラニオン軸21tが中立位置まで戻りきらずに微速動作する事態を解消して安全に停止状態を保つことができる。
【0059】
作動油の温度上昇対応の制御については、図33に制御処理例24のフローチャートを示すように、変速ペダル7bによる走行の場合(S231)において、油温が上昇して閾値(例えば、105℃)を越えた時に、最高速設定ダイヤル9aによる上限速度について所定の規制(例えば、10%)を行う制御処理(S232,S233)を構成する。上記制御処理により、比例ソレノイドバルブ22への出力を規制して負荷を抜くことで油温上昇によるHSTの焼損を防止することができる。
【0060】
前進走行中の変速ペダル7b戻し(踏込み操作解除)による別の減速制御については、図34に制御処理例23のフローチャートを示すように、前進走行時の変速ペダル7bの戻し(踏込み操作解除)操作によって停止する際の前進減速出力終了(S241)の後に、車速が閾値(例えば、0.1〜0.2km/h)未満になったときに、後進側の比例ソレノイドバルブ22の一定時間(例えば、50ms)駆動を一定周期(例えば、2s)で5回繰返し(S242,S243)、また、減速後の車速が上記閾値以上の範囲で、上記繰返しを継続する(S244)制御処理を構成することにより、前進走行中に変速ペダル7bから足を離して減速しても、トラニオン軸21tが中立位置まで戻りきらずに微速動作する事態を解消して安全に停止状態を保つことができる。
【0061】
最高速設定ダイヤル9aは、副変速レバー7dのポジションによって設定可能な上限が規制され、ポジションが作業速Lの場合は上限が60%に規制され、この副変速レバー7dとの関係については、図35に制御処理例24のフローチャートを示すように、ストールガード機能(S251)として副変速レバー7dのポジションが作業速Lであればエンジン回転が低下した時に最高速設定ダイヤル9aの上限を50%に切替える制御処理(S252,S253)を構成することにより、ローダ作業等による高負時に上限規制をかけることができるので、ストールガード機能の精度を向上することができる。
【0062】
油温上昇時の上限規制については、図36に制御処理例25のフローチャートを示すように、油温センサが規定値(例えば、105℃)を超過した場合(S261)に、比例ソレノイドへの出力値の上限規制のために、メモリーした値(例えば、85%)に変更する際に、その値まで所定時間(例えば、500ms)毎に一定値ずつ出力値を低減する制御処理(S262,S263)を構成することにより、規制によって急激に電流値を変更するとトラニオンが戻りすぎて過大な車速低下を招くので、その変化を緩和することにより、過大な車速低下を回避することができる。
【符号の説明】
【0063】
1 作業車両
4 エンジン
5 変速装置
7b 変速ペダル
7c ブレーキペダル
7d 副変速レバー
9c クルーズコントロールスイッチ
9b 感度設定具(レスポンスコントロールダイヤル)
9a 最高速設定ダイヤル
11 無段変速機構
12 副変速機構
12p 副変速レバーセンサ
13 伝動機構
21p 油圧ポンプ
21m 定量油圧モータ
22 比例ソレノイドバルブ
33 前後進レバーセンサ
A 飽和出力値
B 発進出力値
C 停止出力値
P 制御部
【特許請求の範囲】
【請求項1】
停止車速を含む車速範囲を無段階に変速動作してエンジン動力を走行部に変速伝動する無段変速機構(11)と、この無段変速機構(11)を前後進の各走行方向について変速ペダル(7b)の踏込量に基づく目標変速比に変速制御する制御部(P)とを備える作業車両において、
上記制御部(P)は、上記変速ペダル(7b)の操作に対する無段変速機構(11)の追従動作を規定するための感度設定具(9b)を備える構成とし、この感度設定具(9b)による設定感度が所定の標準感度より低感度の場合に、上記変速ペダル(7b)の踏込み後の解除操作について、上記標準感度で停止車速に変速制御することを特徴とする作業車両。
【請求項2】
前記感度設定具(9b)が前記標準感度より高感度の設定の場合に、変速ペダル(7b)の踏込量が所定の基準値以上の踏込み操作について、前記無段変速機構(11)を同標準感度で変速制御することを特徴とする請求項1記載の作業車両。
【請求項3】
前記感度設定具(9b)は、感度を設定するためのダイヤル範囲を最小から最大までの感度範囲と対応して備えるとともに、その最大感度のダイヤル位置を上記感度範囲外の所定の感度としたことを特徴とする請求項1または請求項2のいずれかに記載の作業車両。
【請求項1】
停止車速を含む車速範囲を無段階に変速動作してエンジン動力を走行部に変速伝動する無段変速機構(11)と、この無段変速機構(11)を前後進の各走行方向について変速ペダル(7b)の踏込量に基づく目標変速比に変速制御する制御部(P)とを備える作業車両において、
上記制御部(P)は、上記変速ペダル(7b)の操作に対する無段変速機構(11)の追従動作を規定するための感度設定具(9b)を備える構成とし、この感度設定具(9b)による設定感度が所定の標準感度より低感度の場合に、上記変速ペダル(7b)の踏込み後の解除操作について、上記標準感度で停止車速に変速制御することを特徴とする作業車両。
【請求項2】
前記感度設定具(9b)が前記標準感度より高感度の設定の場合に、変速ペダル(7b)の踏込量が所定の基準値以上の踏込み操作について、前記無段変速機構(11)を同標準感度で変速制御することを特徴とする請求項1記載の作業車両。
【請求項3】
前記感度設定具(9b)は、感度を設定するためのダイヤル範囲を最小から最大までの感度範囲と対応して備えるとともに、その最大感度のダイヤル位置を上記感度範囲外の所定の感度としたことを特徴とする請求項1または請求項2のいずれかに記載の作業車両。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【公開番号】特開2013−104524(P2013−104524A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−250544(P2011−250544)
【出願日】平成23年11月16日(2011.11.16)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月16日(2011.11.16)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]