
作業車
【課題】旋回操作の自由度が高く実用性が高い作業車を提供する。
【解決手段】芝刈り作業車1は、車幅方向に延びる軸線Ax1を回転中心として回転駆動されるドラム式車輪18L、18Rを有する芝刈りユニット2と、芝刈りユニット2に連結されたフレーム10と、フレーム10に設けられた操舵駆動装置11と、を備え、操舵駆動装置11は、車幅方向に配置された一対の操舵輪40L、40Rと、一対の操舵輪40L、40Rの各操舵輪を独立して転舵可能な操舵部41L、41Rと、一対の操舵輪40L、40Rを回転駆動できる車輪駆動部42L、42Rと、を備える。
【解決手段】芝刈り作業車1は、車幅方向に延びる軸線Ax1を回転中心として回転駆動されるドラム式車輪18L、18Rを有する芝刈りユニット2と、芝刈りユニット2に連結されたフレーム10と、フレーム10に設けられた操舵駆動装置11と、を備え、操舵駆動装置11は、車幅方向に配置された一対の操舵輪40L、40Rと、一対の操舵輪40L、40Rの各操舵輪を独立して転舵可能な操舵部41L、41Rと、一対の操舵輪40L、40Rを回転駆動できる車輪駆動部42L、42Rと、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、所定の作業を行う作業ユニットを備えた作業車に関する。
【背景技術】
【0002】
従来から種々の作業を行う作業車が開発されている。例えば、芝刈り作業を行う芝刈り作業車として、操舵不能な左右の非操舵輪を独立駆動することによってこれらの車輪に回転差を与えて作業車を旋回させるものが知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−166543号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の作業車は左右の車輪の回転差を利用して旋回するため、旋回時の路面と車輪との摩擦が大きくなりやすい。その摩擦によって路面を荒らすことを回避するためには車輪の滑り角度を厳格に管理する必要がある。そのため、特許文献1の作業車は向きを変える旋回操作に制約を伴う。
【0005】
そこで、本発明は、旋回操作の自由度が高く実用性が高い作業車を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の作業車は、車幅方向に延びる軸線を回転中心として回転駆動される非操舵輪を有する作業ユニットと、前記作業ユニットに連結されたフレームと、前記フレームに設けられた操舵駆動装置と、を備え、前記操舵駆動装置は、前記車幅方向に配置された一対の操舵輪と、前記一対の操舵輪の各操舵輪を独立して転舵可能な操舵手段と、前記一対の操舵輪の少なくとも一つの操舵輪を回転駆動できる駆動手段と、を備える。
【0007】
この作業車によれば、各操舵輪を独立して操舵でき、かつ少なくとも一つの操舵輪を駆動できる。このため、各操舵輪の転舵角を適宜設定し、少なくとも一つの操舵輪を回転駆動することによって、各操舵輪の回転軸線が交わる非操舵輪上の任意の一点を中心として旋回できる。これにより、作業ユニットの作業内容に適した旋回が可能となるので、作業車の実用性を高めることができる。
【0008】
本発明の作業車の一態様において、車体前後方向に延びる揺動軸線を中心として揺動可能な状態で前記フレームに連結されて前記車幅方向に延びる揺動部材を更に備え、前記一対の操舵輪は、前記操舵手段を介して前記揺動部材に設けられてもよい。この態様によれば、車幅方向の路面の凹凸や傾きを揺動部材が揺動することによって吸収できるので、作業ユニット及び各操舵輪の路面追従性が向上する。
【0009】
本発明の作業車の一態様において、前記フレームは、前記軸線の回りを回転可能な状態かつ前記軸線の方向に移動不能な状態で前記作業ユニットに連結されてもよい。この態様によれば、作業ユニットに対してフレームが軸線の回りを回転して車体前後方向の路面の凹凸を吸収できる。これにより、作業ユニット及び各操舵輪の路面追従性が向上する。
【0010】
本発明の作業車の一態様において、前記操舵手段は、前記一対の操舵輪の各操舵輪について、キャスター角が0度に設定されてもよい。この態様によれば、キャスター角を0度よりも大きな値に設定した場合に比べて、操舵時の操作抵抗、即ち路面と操舵輪との摩擦抵抗を低減できるので、路面を荒らすことを抑えることができる。
【0011】
キャスター角を0度に設定した場合においては、前記操舵手段は、前記一対の操舵輪の各操舵輪について、キングピン軸が回転軸線と直交するように設定されてもよい。この場合には、作業車が停止した状態で操舵した場合に、操舵輪と路面との摩擦範囲をキングピン軸が回転軸線から離れた位置に設定される場合に比べて小さくすることができる。
【0012】
キングピン軸が回転軸線と直交する場合、前記操舵手段は、前記一対の操舵輪の各操舵輪について、前記キングピン軸が車輪幅の中央から離れた所定位置に設定されてもよい。このような位置にキングピン軸が設定されることにより、作業車が停止した状態で操舵した場合に各操舵輪は転がりながら方向転換できる。これにより、作業車が停止した状態での操舵時において路面と操舵輪との摩擦を低減できる。
【0013】
この所定位置は前記一対の操舵輪の各操舵輪が路面に接触する接触領域の境界上の位置又は当該境界に近接した位置であってもよい。この場合には、作業車が停止した状態での操舵時において各操舵輪と路面との摩擦を極力低減させながら各操舵輪を転がすことができる。しかも、操舵輪から遠く離れた位置にキングピン軸が設定される場合に比べて操舵輪からキングピン軸の位置までの距離を短くできる。このため、各操舵輪の方向転換時の回転半径を小さくできる。これにより、操舵駆動装置の小型化に貢献することができる。
【0014】
本発明の作業車の一態様において、前記フレームは、前記作業ユニットに連結されて、前記作業ユニットの斜め上方に延びる傾斜部を有してもよい。この態様によれば、作業ユニットの真上にフレームが位置しないため、作業ユニットの上部を露出させることが容易となる。これにより、作業ユニットを整備する場合や作業ユニットに対して各種操作を行う場合にフレームが妨げにならないので、整備作業の作業性及び各種操作の操作性が向上する。
【0015】
前記駆動手段は、前記一対の操舵輪のそれぞれに設けられた駆動部を有し、前記駆動部が前記一対の操舵輪の各操舵輪の内周側に配置されてもよい。この態様によれば、操舵輪毎に駆動部が設けられているので、各操舵輪を独立して駆動制御できる。また、駆動部が操舵輪の内周側に配置されているので、駆動部から各操舵輪までに至る複雑な動力伝達経路が不要になるので構造が簡略化されかつ操舵駆動装置の小型化に貢献できる。
【0016】
作業ユニットが行う作業内容に格別の制限はない。例えば、作業ユニットとして、床や路面の掃除を行う掃除ユニットや除雪を行う除雪ユニットを本発明の作業車に搭載することができる。また、前記作業ユニットとして、前記一対の操舵輪よりも車体前方に配置された芝刈りユニットが設けられ、前記芝刈りユニットには、前記非操舵輪として、前記車幅方向に互いに隣接して配置され、直径よりも前記車幅方向の寸法が大きい一対の回転体が設けられ、前記一対の回転体よりも前方に芝を刈るための刈刃部が設けられてもよい。この態様によれば、ゴルフ場のグリーンの芝を刈る場合のように、ある程度の広さを持つ芝面に対して作業車を往復移動させて芝刈りする場合、芝の刈り残しを防止するため往復時に芝刈り範囲をオーバーラップさせることが一般的である。この態様の作業車によれば、一対の回転体上の任意の一点を中心として作業車を180度旋回できるので、旋回の終了と同時に芝刈り範囲のオーバーラップを設定できる。そのため、オーバーラップの設定作業を旋回後に特に行う必要がない。これにより、効率的な芝刈り作業が可能となる。
【0017】
作業ユニットとして、芝刈りユニットが搭載される場合、前記操舵手段は、前記一対の操舵輪の各操舵輪について、キャスター角が0に設定され、キングピン軸が回転軸線と直交するように設定され、かつ前記キングピン軸が車輪幅の中央から離れた所定位置に設定されることが好ましい。この場合には、作業車を180度旋回させるために、作業車を停止させた状態で操舵する場合、各操舵輪は転がりながら方向転換できる。従って、芝面と操舵輪との摩擦抵抗を低減できるため、芝面を荒らすことを防止できる。
【0018】
この所定位置は、前記一対の操舵輪の各操舵輪が路面に接触する接触領域の境界上の位置又は当該境界に近接した位置であってもよい。この場合には、作業車を停止させた操舵時に各操舵輪と芝面との摩擦を極力低減させながら各操舵輪を転がすことができる。そのため、各操舵輪と芝面との摩擦によって芝面を荒らすことを防止できる。しかも、操舵輪から遠く離れた位置にキングピン軸が設定される場合に比べて操舵輪からキングピン軸の位置までの距離を短くできるため、各操舵輪の方向転換時の回転半径を小さくできる。これにより、操舵駆動装置の小型化に貢献できる。
【発明の効果】
【0019】
以上説明したように、本発明の作業車によれば、各操舵輪の転舵角を適宜設定し、少なくとも一つの操舵輪を回転駆動することによって、各操舵輪の回転軸線が交わる非操舵輪上の任意の一点を中心として旋回できる。これにより、作業ユニットの作業内容に適した旋回が可能となるので、作業車の実用性を高めることができる。
【図面の簡単な説明】
【0020】
【図1】本発明の一形態に係る芝刈り作業車を示した図。
【図2】図1の芝刈り作業車を矢印II方向から示した図。
【図3】図1の芝刈り作業車を矢印III方向から示した図。
【図4】ドラム式車輪の断面図。
【図5】操舵部を車幅方向から示した拡大図。
【図6】操舵部を車体後方から示した拡大図。
【図7】芝刈り作業車の走行及び旋回パターンを示した図。
【図8】第1ピボットターンの詳細を示した図。
【図9】左回りの第2ピボットターンの詳細を示した図。
【図10】右回りの第2ピボットターンの詳細を示した図。
【図11A】昇降装置の詳細及び刈刃部を上昇させた状態を示した図。
【図11B】昇降装置の詳細及びドラム式車輪を上昇させた状態を示した図。
【図12】位置切替部材と位置調整ピンとを利用した形態を示した図。
【図13】初期状態のジャッキ装置を示した斜視図。
【図14】リフト状態のジャッキ装置を示した斜視図。
【図15】ジャッキ装置を芝刈り作業車に装着した状態を示した斜視図。
【図16】フリーエンコーダの一部を示した斜視図。
【図17】フリーエンコーダの機械的動作を示した断面図。
【図18】芝刈りユニットの刈刃クラッチを操作する操作機構を示した図。
【図19】芝刈りユニットのブレーキを操作する操作機構を示した図。
【発明を実施するための形態】
【0021】
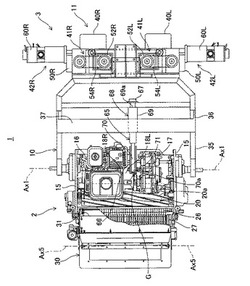
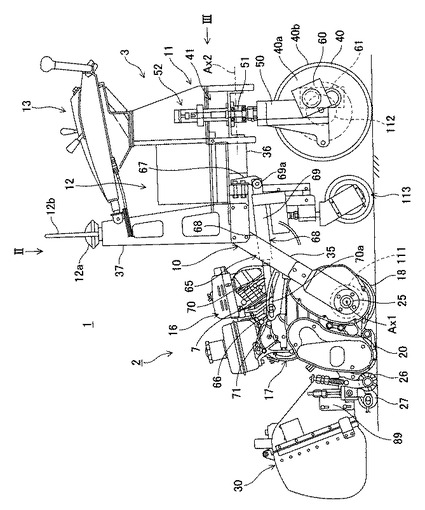
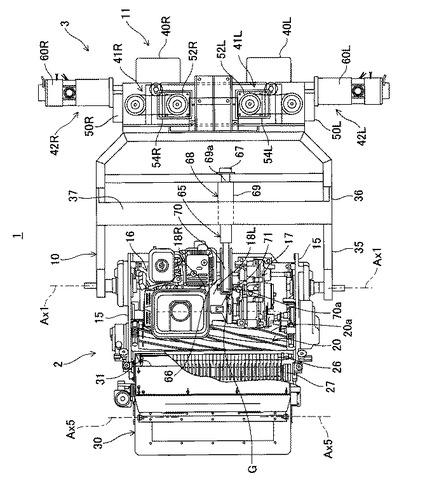
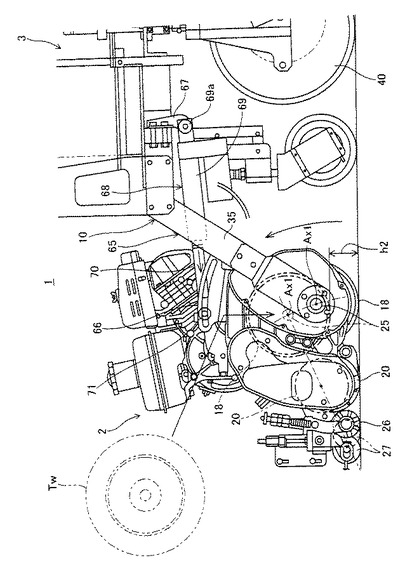
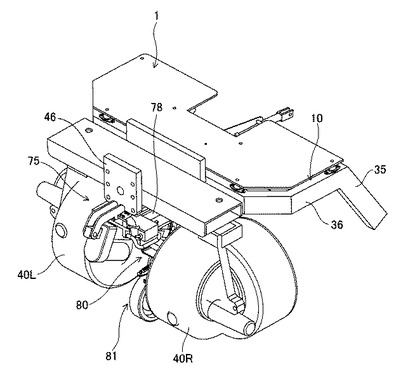
図1〜図3に示すように、芝刈り作業車1は、作業ユニットとしての芝刈りユニット2と、芝刈りユニット2とともに走行可能な本体3とを備えている。芝刈り作業車1の車体前後方向は図1の左右方向に、車体上下方向は図1の上下方向に、車幅方向又は左右方向は図2の上下方向にそれぞれ相当する。芝刈り作業車1の各部品の左右を区別するために参照符号にL、Rを付加する場合がある。芝刈り作業車1は無線操縦モード、手動操縦モード及び自律走行モードの間で運転モードを切り替え可能である。ユーザはこれらのモードを用途に合わせて選択して芝刈り作業車1を使用できる。芝刈りユニット2は芝刈り作業を行うリール式の芝刈機を基礎として構成されている。本体3は、芝刈りユニット2に連結されたフレーム10と、フレーム10に設けられた操舵駆動装置11と、各種の電子機器や周辺装置を含んだ電装ユニット12と、芝刈り作業車1を操作するための操作ユニット13とを有する。なお、便宜上、各図において電装ユニット12の具体的かつ詳細な図示を省略した。また、図2及び図3おいては操作ユニット13の図示を省略した。
【0022】
芝刈りユニット2はベース15(図2参照)を有し、このベース15には芝刈り作業を行うための各種の機器が設けられている。芝刈りユニット2はベース15に搭載されたエンジン16と、エンジン16の出力を変速して各部に伝達する変速機17とを含む。変速機17から出力された動力は左右のドラム式車輪18L、18Rに伝達されるとともに、円筒状の刈刃部20に伝達される。刈刃部20は螺旋状の複数の刈刃20aが円筒状の骨格に取り付けられることにより構成されている。
【0023】
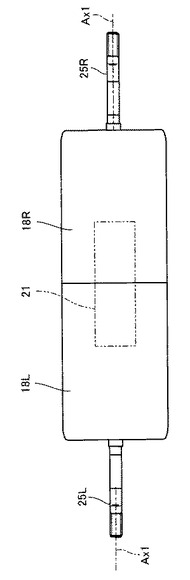
図4にも示したように、ドラム式車輪18L、18Rは、車幅方向に延びる軸線Ax1を回転中心として回転駆動される非操舵輪として構成されている。ドラム式車輪18L、18Rは直径よりも車幅方向の寸法が大きくなるように形成されている。これにより、芝面への接触圧を減少させ、芝面の損傷を軽減できる。ドラム式車輪18L、18Rは、車幅方向に互いに隣接して配置され、連結機構21によって互いに相対回転な状態で連結されている。ドラム式車輪18L、18Rは車幅方向に突出する車軸25L、25Rを有している。変速機17と車軸25L、25Rとの間の動力伝達経路には不図示のディファレンシャル機構が設けられている。このディファレンシャル機構によってドラム式車輪18L、18Rは差動回転できる。一対のドラム式車輪18L、18Rは一対の回転体に相当する。
【0024】
ドラム式車輪18L、18Rの前方にはサッチングローラ26及びスムージングローラ27が配置されている。サッチングローラ26は芝生内に入り込んだ刈かすを除去する。スムージングローラ27はベース15に対して昇降可能に取り付けられていて、スムージングローラ27によって刈刃部20による芝の刈り取り長さを調整できる。刈刃部20にて刈り取られた芝の刈かすは、不図示のカバーにて前方に案内されてから芝刈りユニット2の前端部に設けられた収集排出装置30に収集される。収集排出装置30には芝の刈かすが流入する流入口31が形成されている。
【0025】
図1及び図2に示すように、フレーム10はドラム式車輪18の車軸25に対して回転自在に取り付けられている。これによりフレーム10は軸線Ax1の回りを回転可能な状態かつ軸線Ax1の方向に移動不能な状態で作業ユニット2に連結される。これにより、芝刈りユニット2に対してフレーム10が軸線Ax1の回りを回転して車体前後方向の路面の凹凸を吸収できる。そのため、芝刈り作業車1の路面追従性が向上する。フレーム10は芝刈りユニット2に対する連結位置から斜め上方に延びる傾斜部35と、傾斜部35から水平方向に延びる水平部36とを有している。フレーム10が傾斜部35を有しているので、芝刈りユニット2の真上にフレーム10等の構造物が位置しない。このため、芝刈りユニット2の上部を露出させることが容易となり、芝刈りユニット2を整備する場合や芝刈りユニット2に対して各種操作を行う場合にフレーム10が妨げにならないので整備作業の作業性及び各種操作の操作性が向上する。水平部36には電装ユニット12及び操作ユニット13がそれぞれ配置される。水平部36の前端にはラック部37が取り付けられている。ラック部37の上部には電装ユニット12のGPSアンテナ12a及び無線アンテナ12bがそれぞれ取り付けられている。また、ラック部37の上部には不図示の生物検知センサ及びヘッドライトがそれぞれ取り付けられている。
【0026】
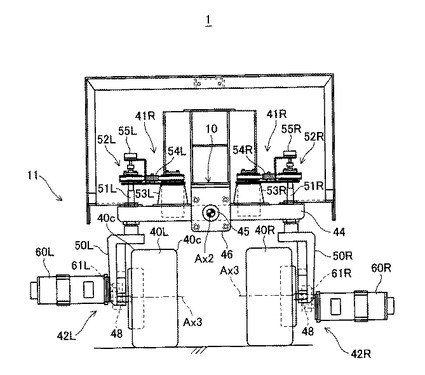
操舵駆動装置11は、車幅方向に配置された一対の操舵輪40L、40Rと、各操舵輪40L、40Rを独立して転舵するための操舵部41L、41Rと、各操舵輪40L、40Rを駆動する車輪駆動部42L、42Rと、を備えている。操舵駆動装置11の左右一対の構成要素は左右対称の構造である。左右の操舵部41L、41Rを一組としたものが操舵手段に相当し、左右の車輪駆動部42L、42Rを一組としたものが駆動手段に相当する。各操舵輪40は円筒状の本体40aの外周面に合成ゴム40bが焼き付けられることにより構成されている。各操舵輪40のコーナーが面取りされることにより各操舵輪40にはショルダー部40cが形成される。操舵輪40L、40Rは、操舵部41L、41Rを介して揺動部材44に取り付けられている。
【0027】
図1及び図3に示すように、揺動部材44は車幅方向に延びている部材である。揺動部材44は、その中央を通り車体前後方向に延びる揺動軸線Ax2を中心として揺動可能な状態でフレーム10に連結されている。これにより、車幅方向の路面の凹凸や傾きを揺動部材44が揺動することによって吸収できるので、芝刈り作業車1の路面追従性が向上する。具体的には、揺動部材44の中央を貫く揺動軸45が、フレーム10に固定されたブラケット46に不図示の軸受を介して取り付けられることによって、揺動部材44がフレーム10に連結されている。揺動部材44の中心部を基準として左右対称に操舵部41L、41Rが取り付けられている。
【0028】
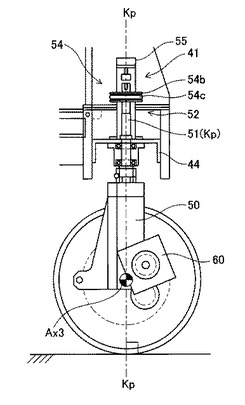
操舵部41は、車軸48の中心を通る回転軸線Ax3の回りに回転可能に操舵輪40を支持するハブキャリア50と、ハブキャリア50に一端が固定され、他端が上方に延びて揺動部材44に回転自在に設けられた旋回軸51と、旋回軸51を回転駆動する操舵機構52とを備えている。操舵機構52は、駆動源である電動モータ53と、電動モータ53の回転を旋回軸51に伝達する伝達機構54と、旋回軸51の回転角度、即ち操舵輪40の転舵角を検出する回転角度センサ55とを備えている。図5及び図6にも示すように、伝達機構54は電動モータ53に連結された駆動プーリ54aと、旋回軸51の先端部に連結された被駆動プーリ54bと、駆動プーリ54a及び被駆動プーリ54bに掛け渡されたベルト54cと、ベルト54cの張力を調整するテンションプーリ54dとを備えている。駆動プーリ54a及び被駆動プーリ54bはそれぞれ歯付きプーリであり、ベルト54cは各プーリ54a、54bに噛み合う歯付きベルトである。
【0029】
図5及び図6に示すように、操舵部41は、旋回軸51がキングピン軸Kpに一致している。そして、キャスター角が0度であり、キングピン軸KPが回転軸線Ax3と直交している。キャスター角が0度であると、それ以外の場合に比べて操舵時の芝面と操舵輪40との摩擦抵抗を低減できるので、芝面を荒らすことを抑えることができる。また、キングピン軸Kpが回転軸線Ax3と直交しているから、芝刈り作業車1が停止した状態での操舵時の操舵輪40と芝面との摩擦範囲を、キングピン軸Kpが回転軸線Ax3から離れた位置、例えばキングピン軸Kpが回転軸線Ax3よりも前方又は後方に離れた位置に設定される場合に比べて小さくすることができる。
【0030】
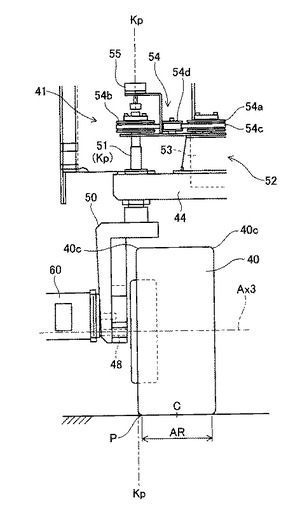
また、図6に示すように、操舵部41は、キングピン軸Kpが操舵輪40の車輪幅の中央Cから離れた位置に設定されている。本形態では、操舵輪40が平面状の路面に接触する接触領域ARの境界Pに近接する操舵輪40の幅方向の端に、キングピン軸Kpが設定されている。このような位置にキングピン軸Kpが設定されることにより、芝刈り作業車1が停止した状態で操舵した場合に操舵輪40は転がりながら方向転換でき、芝面との摩擦を極力低減できる。しかも、操舵輪40から遠く離れた位置にキングピン軸Kpが設定される場合に比べて操舵輪40からキングピン軸Kpの位置までの距離を短くできるため、操舵輪40の方向転換時の回転半径を小さくできる。これにより、操舵駆動装置11の小型化に貢献できる。キングピン軸Kpの位置を境界Pに設定しても上記とほとんど同じ効果を得ることができる。
【0031】
図3に示したように、車輪駆動部42は、ハブキャリア50に取り付けられた電動モータ60と、電動モータ60の回転を減速して操舵輪40の車軸48に伝達する減速機61とを備えている。電動モータ60及び減速機61は操舵輪40の半径方向外側にはみ出ずに、操舵輪40の内周側に収まっている。つまり車輪駆動部42は操舵輪40の内周側に配置されている。そのため、車輪駆動部42から操舵輪40までに至る複雑な動力伝達経路が不要になるので構造が簡略化されかつ小型化に貢献できる。
【0032】
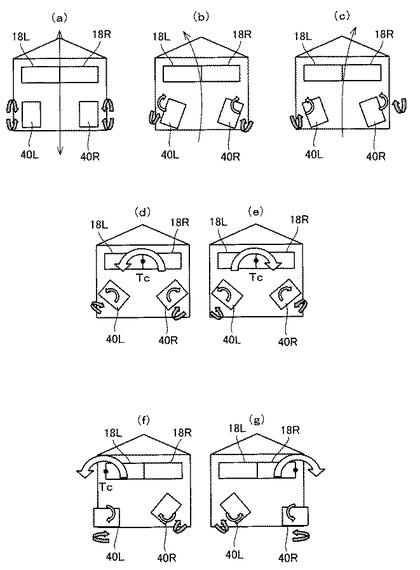
以上説明したように、芝刈り作業車1は一対の操舵輪40L、40Rを独立して転舵及び駆動できる操舵駆動装置11を備えているので、芝刈り作業車1は芝刈り作業に適した走行及び旋回ができる。図7に示すように、各操舵輪40L、40Rの転舵角及び回転駆動方向を適宜設定することにより、従来からの作業車と同様の走行が可能である。即ち、芝刈り作業車1は、(a)直線走行、(b)左旋回走行、及び(c)右旋回走行がそれぞれ可能である。また、芝刈り作業車1を停止させた状態で旋回させる場合、各操舵輪40L、40Rの回転軸線が交わり、かつ一対のドラム式車輪18L、18R上の任意の一点を中心として旋回が可能である。例えば、芝刈り作業車1は、(d)一対のドラム式車輪18L、18Rの境目を旋回中心Tcとした左回りのピボットターン、(e)一対のドラム式車輪18L、18Rの境目を旋回中心Tcとした右回りのピボットターン、(f)左のドラム式車輪18Lの左端部を旋回中心Tcとした左回りのピボットターン、及び(g)右のドラム式車輪18Rの右端部を旋回中心Tcとした右回りのピボットターンがそれぞれ可能である。
【0033】
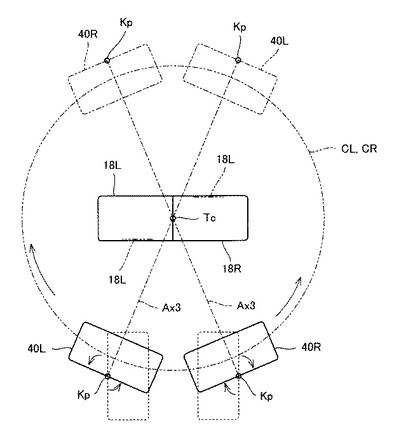
図7の(d)及び(e)のピボットターンは、180度旋回した場合に左右方向に位置をずらさずに芝刈り作業車1を反転させる。これを第1ピボットターンと呼ぶ。図8に示すように、第1ピボットターンにおいて、芝刈り作業車1は各操舵輪40L、40Rが走行軌跡CL、CRを一致させて走行しながら旋回中心Tcを中心として旋回する。第1ピボットターンは、一対のドラム式車輪18L、18Rの境目が旋回中心Tcとなるので、旋回の前後で一対のドラム式車輪18L、18Rが入れ替わるが左右方向に位置ずれしない。
【0034】
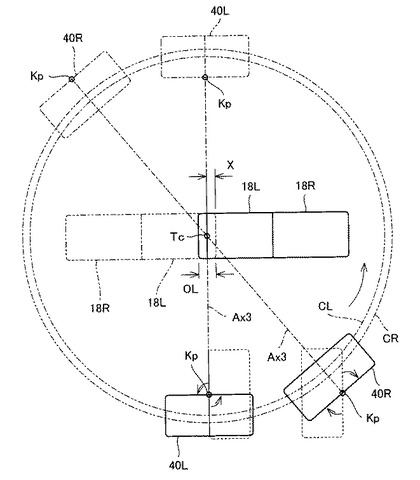
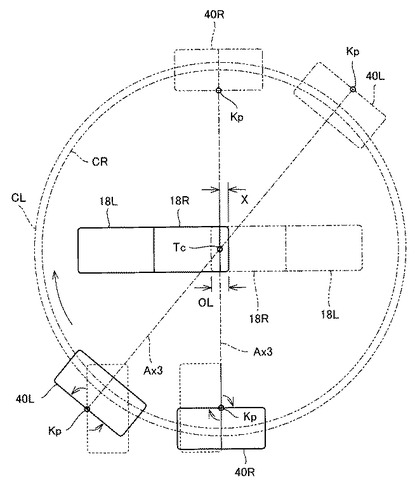
一方、図7の(f)及び(g)のピボットターンは、180度旋回した場合に左右方向に位置をずらして芝刈り作業車1を反転させる。これを第2ピボットターンと呼ぶ。図9及び図10に示すように、第2ピボットターンにおいて、芝刈り作業車1は各操舵輪40L、40Rが走行軌跡CL、CRに沿って走行しながら旋回中心Tcを中心として旋回する。第2ピボットターンは、旋回の前後で一対のドラム式車輪18L、18Rが右方向又は左方向にずれる。図9及び図10に示すように、ドラム式車輪18の端部からの旋回中心Tcまでの距離をオフセットXとした場合、ドラム式車輪18の旋回前後のオーバーラップOLはオフセットXの2倍となる。刈刃部20(図2参照)の横幅は、一対のドラム式車輪18L、18Rの軸方向の合計寸法と等しいので、図9又は図10のオーバーラップOLは刈刃部20による芝刈り範囲のオーバーラップと等しい。
【0035】
例えば、ゴルフ場のグリーンの芝を刈る場合のように、ある程度の広さを持つ芝面に対して芝刈り作業車1を往復移動させて芝刈りする場合、芝の刈り残しを防止するため往復時に芝刈り範囲をオーバーラップさせることが一般的である。芝刈り作業車1は、上記のようにオフセットXを各操舵輪40L、40Rの転舵角によって設定して、第2ピボットターンを行うことができる。従って、第2ピボットターンの終了と同時に芝刈り範囲のオーバーラップを設定できるため、オーバーラップの設定作業を旋回後に特に行う必要がない。これにより、効率的な芝刈り作業が可能となる。
【0036】
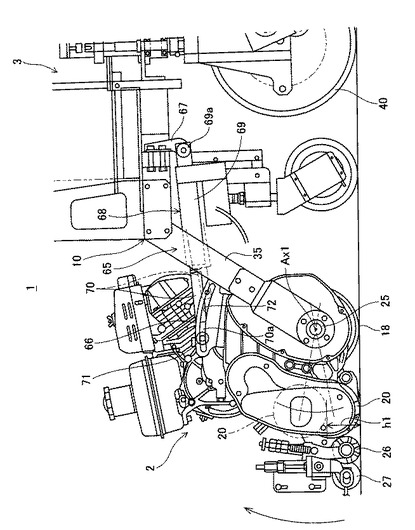
図1及び図2示すように、芝刈り作業車1には、芝刈りユニット2を昇降させる昇降装置65が設けられている。昇降装置65は、芝刈りユニット2に設けられた第1支持部66と、本体3の一部であるフレーム10に設けられた第2支持部67と、第1支持部66と第2支持部67との間に設けられた駆動機構としてのリニアアクチュエータ68とを備えている。リニアアクチュエータ68は、駆動源を有する本体部69と、本体部69に組み付けられた伸縮ロッド70とを有する。伸縮ロッド70の先端部70aは第1支持部66にリンク結合され、本体部69の後端部69aは第2支持部67にリンク結合されている。先端部70aが第1端部に、後端部69aが第2端部にそれぞれ相当する。リニアアクチュエータ68は伸縮ロッド70を本体部69に対して設計範囲内においてストロークさせることができる。これにより、リニアアクチュエータ68は伸縮ロッド70の先端部70aと、本体部69の後端部69aとの距離を変化させることができる。本形態においては、芝刈りユニット2のドラム式車輪18及びスムージングローラ27がそれぞれ路面に接触し、かつ操舵輪40が路面に接触している状態を基準とした伸縮ロッド70の先端部70aと本体部69の後端部69aとの距離が基準距離に相当する。
【0037】
図11Aにも示したように、第1支持部66には、伸縮ロッド70の先端部70aの結合位置の拘束とその解除を行う拘束具71が取り付けられている。先端部70aの結合位置を変化させるため、第1支持部66には上方向に湾曲した長孔72が形成されている。この長孔72の範囲内で伸縮ロッド70の先端部70aの結合位置を変化させることができる。この結合位置を調整する場合には、まず拘束具71を解除状態として、長孔72に沿って結合位置を変更する。次に、変更後の結合位置にて拘束具71を解除状態から拘束状態へ切り替える。これにより、結合位置を所望の位置に調整できる。拘束具71と長孔72とを組み合わせたものが位置調整機構に相当する。
【0038】
図11Aに示すように、ドラム式車輪18及び操舵輪40がそれぞれ路面に接触した状態からリニアアクチュエータ68の伸縮ロッド70を2点鎖線の位置まで縮めると、ドラム式車輪18が路面に接触した状態のまま芝刈りユニット2が軸線Ax1を中心として上方に回転しながら持ち上げられる。これにより刈刃部20が路面から浮かぶため、芝刈り作業を中断できる。そして、刈刃部20が路面から浮いた状態から、伸縮ロッド70を実線で示した元の長さに戻すことにより、刈刃部20を路面に接触させて芝刈り作業を再開できる。また、昇降装置65を利用して刃部20を芝面から浮かせた状態であれば、芝刈り作業車1にピボットターンをさせても刈刃部20が芝面に接触したまま引き摺られることがない。従って、芝刈り作業車1のピボットターン時に芝面を著しく傷つけることを防止できる。なお、刈刃部20のリフト量h1は、伸縮ロッド70のストローク又は先端部70aの結合位置の調整によって変更可能である。
【0039】
一方、図11Bに示すように、ドラム式車輪18及び操舵輪40が路面にそれぞれ接触し、かつ芝刈り作業車1が停止した状態からリニアアクチュエータ68の伸縮ロッド70を矢印方向に延長すると、芝刈りユニット2がスムージングローラ27を支点として図11Aの場合とは反対回りに回転する。これにより、スムージングローラ27及び操舵輪40を路面に接触させた状態でドラム式車輪18を路面から浮かすことができる。スムージングローラ27が芝刈りユニット2の回転動作の支点となるため、ドラム式車輪18の浮上動作時に芝刈りユニット2が芝面に噛み込む等の不具合の発生を防止できる。ドラム式車輪18のリフト量h2は伸縮ロッド70のストローク又は先端部70aの結合位置の調整によって変更可能である。なお、図11Bの浮上動作を行うにあたり、リニアアクチュエータ68のストローク量が足りない場合は、伸縮ロッド70の先端部70aの結合位置を車体後方側へ調整することによってストローク量の不足を補うことができる。
【0040】
芝刈り作業車1は、ドラム式車輪18よりも直径が大きな移動用車輪Twを車軸25に着脱できるように構成されている。昇降装置65にてドラム式車輪18を浮かせることができるので、移動用車輪Twを着脱する際に油圧ジャッキ等の装置を利用して芝刈りユニット2をジャッキアップする必要がない。従って、芝刈り作業車1の実用性が向上する。また、伸縮ロッド70の先端部70aの結合位置を調整することにより、リニアアクチュエータ68のストローク量に対する各リフト量h1、h2を変化させることができる。また、同調整によって、リニアアクチュエータ68の作動時の負荷を調整することもできる。
【0041】
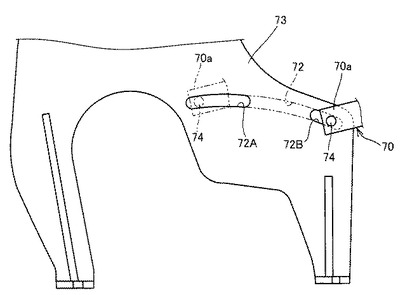
伸縮ロッド70の先端部70aの結合位置を、図11Aの態様に適した位置と図11Bの態様に適した位置との間で選択的に切り替えることも可能である。このような切り替えは図12に示した板状の位置切替部材73と位置調整ピン74とを連係させることで実現できる。位置切替部材73は、伸縮ロッド70を挟んで第1支持部66の反対側に位置するようにして芝刈りユニット2に取り付けられる。位置切替部材73には、第1支持部66に形成された長孔72と重なる位置に2つの長孔72A及び長孔72Bが形成されている。長孔72Aは車体前方側でかつ図11Aに示した刈刃部20の昇降時に適した位置に配置されている。長孔72Bは車体後方側でかつ図11Bに示した車輪18の浮上動作時に適した位置に配置されている。位置調整ピン74は伸縮ロッド70の先端部70aを貫いた状態で長孔72A及び長孔72Bに対して抜き差しできる。従って、刈刃部20を昇降させる場合(図11A参照)には位置調整ピン74を長孔72Aに挿入する。これにより、伸縮ロッド70の先端部70aが長孔72Aの範囲で位置決めされ、位置調整ピン74が作用点となって刈刃部20を昇降させることができる。一方、車輪18を浮上させる場合(図11B参照)には、位置調整ピン74を長孔72Aから抜いて、長孔72Bに挿入する。これにより、伸縮ロッド70の先端部70aが長孔72Bの範囲で位置決めされ、位置調整ピン74が作用点となって車輪18の浮上が可能となる。この形態においては、位置切替部材73の各長孔72A、72Bと位置調整ピン74とを組み合わせたものが位置調整機構に相当する。なお、長孔72A又は長孔72Bに位置調整ピン74が挿入された状態で、拘束具71を用いて先端部70aの結合位置を微調整することも可能である。また、長孔72A又は長孔72Bと位置調整ピン74との遊びを無くすこともできる。
【0042】
図2に示したように、芝刈りユニット2の重心Gは中央よりも左側に位置している。即ち、芝刈りユニット2の重量配分は軸線Ax1の方向の中央から左側に偏っている。昇降装置65の第1支持部66及び第2支持部67は、それぞれ重量配分が偏る左側に位置し、かつ車体前後方向に並んでいる。そのため、昇降装置65による芝刈りユニット2の昇降中に車幅方向のバランスが崩れ難い。これにより、芝刈りユニット2の昇降動作が安定する。なお、各支持部66、67を重心線と交差し、かつ車体前後方向に延びる直線上に配置することもできる。この場合には、昇降時の作業ユニット2の車幅方向のバランスが完全に釣り合うので、作業ユニット2の昇降動作の安定性が更に向上する。
【0043】
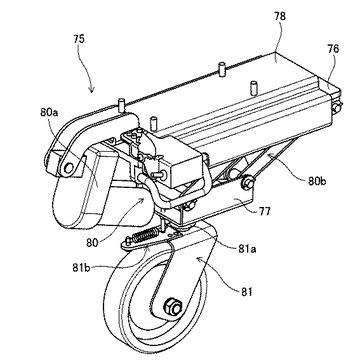
図13〜図15に示すように、芝刈り作業車1は、操舵輪40を路面から浮かすためのジャッキ装置75を着脱できる。ジャッキ装置75はスライドベース76と、そのスライドベース76に対して平行に配置された下部ベース77とを有している。ジャッキ装置75は、スライドベース76が芝刈り作業車1の側のホルダー装置78に対してスライドしながら装着されることにより、芝刈り作業車1に対して着脱される(図15参照)。ホルダー装置78は左右の操舵輪40L、40Rの間に配置され、スライド方向を車体前後方向に一致させた状態でフレーム10の水平部36に固定されている。ホルダー装置78は、ジャッキ装置75が装着された場合に車幅方向及び上下方向の移動を拘束できるように、スライドベース76と噛み合うことができる。
【0044】
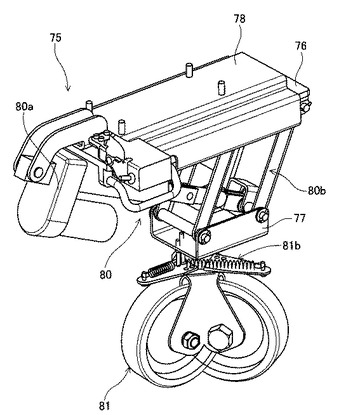
ジャッキ装置75は、スライドベース76と下部ベース77とを平行に保ちながらこれらの間隔を図13の状態から図14の状態へ変更可能なジャッキ機構部80と、下部ベース77に設けられたキャスター部81とを更に備えている。ジャッキ機構部80は駆動モータ80aの動力を利用して、スライドベース76と下部ベース77との間に介在するリンク機構80bを上下動させる周知の機構である。キャスター部81は、上下方向に延びて下部ベース77に回転自在に取り付けられた旋回軸81aと、図14のように向きが変化した状態から直進状態の基準位置にばね力を利用して復帰させる戻り機構81bとを有している。
【0045】
図13に示した初期状態のジャッキ装置75を芝刈り作業車1に装着してからジャッキ機構部80を作動させて図14のリフト状態に変化させる。これにより、図15に示すように、各操舵輪40L、40Rを路面から浮かすことができる。上述した移動用車輪Tw(図11B参照)が装着された状態で、ジャッキ装置75にて各操舵輪40L、40Rをジャッキアップすることにより、芝刈り作業車1は左右の移動用車輪Twと、キャスター部81とによって支持される。これにより、芝刈り作業車1を移動用車輪Twに出力されるエンジン16の駆動力によって又は人力によって無理なく移動させることが可能になる。
【0046】
図1に示したように、芝刈り作業車1はその走行状態を検出するため、前輪側エンコーダ111、後輪側エンコーダ112及びこれらの中間に位置するフリーエンコーダ113が設けられている。前輪側エンコーダ111は左右のドラム式車輪18L、18Rの車輪毎に設けられ、後輪側エンコーダ112は左右の操舵輪40L、40Rの車輪毎に設けられている。フリーエンコーダ113は車幅方向の中央に一つ設けられている。
【0047】
上述したように、ドラム式車輪18L、18Rは、互いに差回転しかつそれぞれ駆動トルクを発生する。前輪側エンコーダ111を用いて差回転や各車輪のスキッドを検出できる。それにより、ドラム式車輪18L、18Rの駆動制御の精度向上を図ることができるとともに、一対の操舵輪40L、40Rを駆動させるタイミングを得ることができる。一対の操舵輪40L、40Rは独立に駆動できるため、芝刈り作業車1の前後進時や旋回時に差回転やスキッドが発生する。後輪側エンコーダ112を用いて差回転や各車輪のスキッドを検出することができる。これにより、芝刈り作業車1を予定した走行軌跡に正確に合わせた各操舵輪40L、40Rの駆動制御が可能になる。
【0048】
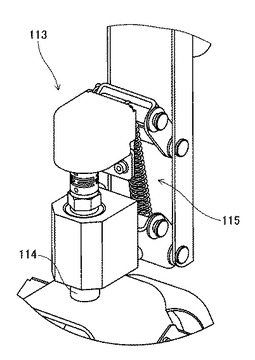
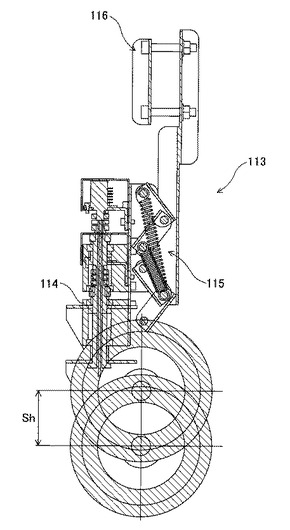
図1に示したように、フリーエンコーダ113は駆動力を持たずに自由に回転できるキャスター構造である。そのため、束縛のない自然な転がりが得られる。図16及び図17にも示したように、フリーエンコーダ113は、上下方向に延びて回転自在な旋回軸114と、上下方向のストロークSh(図17参照)を許容するサスペンション115を有している。そのため、芝刈り作業車1の進行方向の変化や路面の変化に容易に追従することができる。従って、芝刈り作業車1の正確な走行状態を検出することが可能となる。一般に、車両の走行状態の検出するセンサとして、路面へ検査光を照射し、その反射光に基づいて位置情報を検出する光学的センサが従来から知られている。しかし芝刈り作業車1は芝面を走行するものであるから、こうした光学的センサを用いても芝面からの反射光が乱れるため検査精度を確保することが難しい。従って、上述のように路面追従性が高められたフリーエンコーダ113は芝刈り作業車1への適用に有効である。
【0049】
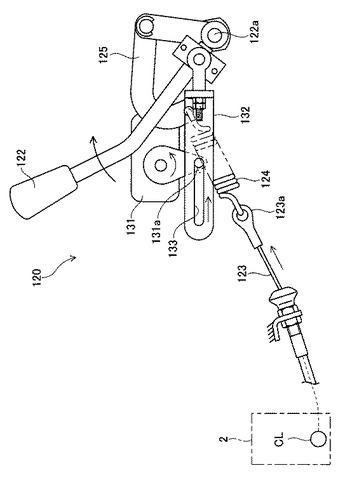
図1に示した操作ユニット13は、芝刈りユニット2の操作について手動操作と自動操作とを兼用できる操作機構120、140を備えている。図18に示したように、操作機構120は芝刈りユニット2の例えば刈刃クラッチCLを操作するための操作レバー122を有している。操作レバー122は回転軸122aの回りに回転できる。刈刃クラッチCLと操作レバー122とはワイヤ123を介して連結されている。ワイヤ123の端部123aには過大な操作力の入力を抑制するコイルばね124が設けられている。コイルばね124は操作レバー122の操作力を伝達する中間機構125に連結されている。従って、ユーザが操作レバー122を矢印方向に回転させると、その操作力が中間機構125を介してワイヤ123に伝達されてワイヤ123が引っ張られる。これにより、刈刃クラッチCLを手動で操作できる。
【0050】
操作機構120は、刈刃クラッチCLを自動で操作するため、駆動機構としてのロータリーアクチュエータ131と、操作レバー122とロータリーアクチュエータ131との間に介在する介在部材132とを更に備えている。介在部材132は一端が操作レバー122にリンク結合されるとともに、他端が長孔133を介してロータリーアクチュエータ131のピン131aに結合されている。ピン131aは介在部材132の長孔に対して滑りながら相対回転可能な状態で結合されている。ロータリーアクチュエータ131が矢印方向に回転すると、介在部材132が矢印方向に移動して、操作レバー122を矢印方向に回転させることができる。そのため、ロータリーアクチュエータ131を制御することによって、刈刃クラッチCLを自動操作できる。ロータリーアクチュエータ131のピン131aと介在部材132とは長孔133の両端部を移動の限度として相対移動可能である。従って、操作レバー122を手動で動かした場合には、介在部材132がピン131aに対して相対移動する。それにより、操作レバー122に対する手動操作に伴う操作力はロータリーアクチュエータ131に入力されない。そのため、刈刃クラッチCLに対して手動操作と自動操作とを操作機構120にて兼用できる。
【0051】
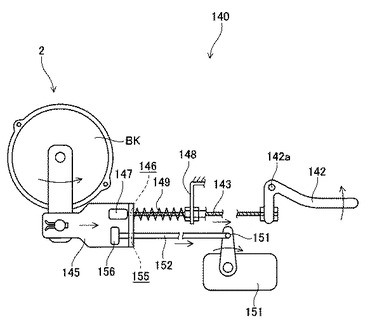
図19に示したように、操作機構140は芝刈りユニット2の例えばブレーキBKを操作する操作レバー142を有している。操作レバー142は回転軸142aの回りに回転できる。ブレーキBKと操作レバー122との間にはワイヤ143が介在している。ワイヤ143の一端は操作レバー142に連結されており、ワイヤ143の他端は中間部材145を介してブレーキBKに連結されている。中間部材145にはワイヤ143の直径よりも若干大きな内径を持つ取り付け孔146が形成されている。ワイヤ143は取り付け孔146に挿入されており、その先端部には取り付け孔146の内径よりも十分に大きな抜け止め部材147が固定されている。これにより、操作レバー142が矢印方向に操作されるとワイヤ143が矢印方向に引かれる。ワイヤ143の先端部には抜け止め部材147が固定されているので、その抜け止め部材147が中間部材145に突き当たる。そのため、中間部材145が矢印方向に引かれてブレーキBKが矢印方向に操作される。これにより、ブレーキBKを手動で操作できる。ワイヤ143はブラケット148にて支持されており、そのブラケット148と中間部材145との間にはリターンスプリング149が装着されている。そのため、操作レバー142が操作位置から離されるとリターンスプリング149の弾性力によって、操作レバー142は元の位置に復帰する。
【0052】
操作機構140は、ブレーキBKを自動で操作するため、駆動機構としてのロータリーアクチュエータ151と、そのピン151aにリンク結合されたロッド152とを有している。中間部材145にはロッド152の直径よりも若干大きな内径を持つ取り付け孔155が形成されている。ロッド152は取り付け孔155に挿入されており、その先端部には取り付け孔155の内径よりも十分に大きな抜け止め部材156が固定されている。ロータリーアクチュエータ151が矢印方向に回転すると、ロッド152が矢印方向に引かれる。ロッド152の先端部には抜け止め部材156が固定されているので、抜け止め部材156が中間部材145に突き当たる。そのため、中間部材145が矢印方向に引かれてブレーキBKが矢印方向に操作される。従って、ロータリーアクチュエータ151を制御することによってブレーキBKを自動操作できる。中間部材145はロッド152の先端部に取り付けられた抜け止め部材156に突き当たらない限り、ロッド152が挿入された状態で自由に移動できる。そのため、操作レバー142に対する手動操作に伴う操作力はロータリーアクチュエータ151に入力されない。また、ロータリーアクチュエータ151による自動操作時も同様に、中間部材145はワイヤ143が挿入された状態で自由に移動できる。従って、ワイヤ143や操作レバー142は動かない。そのため、ブレーキBKに対して手動操作と自動操作とを操作機構140にて兼用できる。
【0053】
本発明は上記形態に限定されず、種々の形態にて実施できる。一対の操舵輪40L、40Rのいずれか一方の操舵輪のみを回転駆動する形態にて本発明を実施することもできる。いずれか一方の操舵輪を駆動できれば、上記形態と同様の走行及び旋回パターン(図7参照)を実現できる。また、床や路面の掃除を行う掃除ユニットを搭載した掃除作業車や除雪を行う除雪ユニットを搭載した除雪作業車として本発明を実施することもできる。キャスター角やキングピン軸の位置等の操舵輪に関するジオメトリは作業ユニットの作業内容に応じて適宜設定してよい。また、左右の非操舵輪は図4に示した形態に限定されない。例えば、直径よりも車幅方向の寸法が大きい左右の車輪のそれぞれを、一本の共通の車軸に対して回転自在に装着した形態にて非操舵輪を実施することも可能である。
【符号の説明】
【0054】
1 芝刈り作業車(作業車)
2 芝刈りユニット(作業ユニット)
10 フレーム
11 操舵駆動装置
18L、18R ドラム式車輪(非操舵輪)
40L、40R 操舵輪
42L、42R 車輪駆動部
Ax1 軸線
【技術分野】
【0001】
本発明は、所定の作業を行う作業ユニットを備えた作業車に関する。
【背景技術】
【0002】
従来から種々の作業を行う作業車が開発されている。例えば、芝刈り作業を行う芝刈り作業車として、操舵不能な左右の非操舵輪を独立駆動することによってこれらの車輪に回転差を与えて作業車を旋回させるものが知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−166543号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の作業車は左右の車輪の回転差を利用して旋回するため、旋回時の路面と車輪との摩擦が大きくなりやすい。その摩擦によって路面を荒らすことを回避するためには車輪の滑り角度を厳格に管理する必要がある。そのため、特許文献1の作業車は向きを変える旋回操作に制約を伴う。
【0005】
そこで、本発明は、旋回操作の自由度が高く実用性が高い作業車を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の作業車は、車幅方向に延びる軸線を回転中心として回転駆動される非操舵輪を有する作業ユニットと、前記作業ユニットに連結されたフレームと、前記フレームに設けられた操舵駆動装置と、を備え、前記操舵駆動装置は、前記車幅方向に配置された一対の操舵輪と、前記一対の操舵輪の各操舵輪を独立して転舵可能な操舵手段と、前記一対の操舵輪の少なくとも一つの操舵輪を回転駆動できる駆動手段と、を備える。
【0007】
この作業車によれば、各操舵輪を独立して操舵でき、かつ少なくとも一つの操舵輪を駆動できる。このため、各操舵輪の転舵角を適宜設定し、少なくとも一つの操舵輪を回転駆動することによって、各操舵輪の回転軸線が交わる非操舵輪上の任意の一点を中心として旋回できる。これにより、作業ユニットの作業内容に適した旋回が可能となるので、作業車の実用性を高めることができる。
【0008】
本発明の作業車の一態様において、車体前後方向に延びる揺動軸線を中心として揺動可能な状態で前記フレームに連結されて前記車幅方向に延びる揺動部材を更に備え、前記一対の操舵輪は、前記操舵手段を介して前記揺動部材に設けられてもよい。この態様によれば、車幅方向の路面の凹凸や傾きを揺動部材が揺動することによって吸収できるので、作業ユニット及び各操舵輪の路面追従性が向上する。
【0009】
本発明の作業車の一態様において、前記フレームは、前記軸線の回りを回転可能な状態かつ前記軸線の方向に移動不能な状態で前記作業ユニットに連結されてもよい。この態様によれば、作業ユニットに対してフレームが軸線の回りを回転して車体前後方向の路面の凹凸を吸収できる。これにより、作業ユニット及び各操舵輪の路面追従性が向上する。
【0010】
本発明の作業車の一態様において、前記操舵手段は、前記一対の操舵輪の各操舵輪について、キャスター角が0度に設定されてもよい。この態様によれば、キャスター角を0度よりも大きな値に設定した場合に比べて、操舵時の操作抵抗、即ち路面と操舵輪との摩擦抵抗を低減できるので、路面を荒らすことを抑えることができる。
【0011】
キャスター角を0度に設定した場合においては、前記操舵手段は、前記一対の操舵輪の各操舵輪について、キングピン軸が回転軸線と直交するように設定されてもよい。この場合には、作業車が停止した状態で操舵した場合に、操舵輪と路面との摩擦範囲をキングピン軸が回転軸線から離れた位置に設定される場合に比べて小さくすることができる。
【0012】
キングピン軸が回転軸線と直交する場合、前記操舵手段は、前記一対の操舵輪の各操舵輪について、前記キングピン軸が車輪幅の中央から離れた所定位置に設定されてもよい。このような位置にキングピン軸が設定されることにより、作業車が停止した状態で操舵した場合に各操舵輪は転がりながら方向転換できる。これにより、作業車が停止した状態での操舵時において路面と操舵輪との摩擦を低減できる。
【0013】
この所定位置は前記一対の操舵輪の各操舵輪が路面に接触する接触領域の境界上の位置又は当該境界に近接した位置であってもよい。この場合には、作業車が停止した状態での操舵時において各操舵輪と路面との摩擦を極力低減させながら各操舵輪を転がすことができる。しかも、操舵輪から遠く離れた位置にキングピン軸が設定される場合に比べて操舵輪からキングピン軸の位置までの距離を短くできる。このため、各操舵輪の方向転換時の回転半径を小さくできる。これにより、操舵駆動装置の小型化に貢献することができる。
【0014】
本発明の作業車の一態様において、前記フレームは、前記作業ユニットに連結されて、前記作業ユニットの斜め上方に延びる傾斜部を有してもよい。この態様によれば、作業ユニットの真上にフレームが位置しないため、作業ユニットの上部を露出させることが容易となる。これにより、作業ユニットを整備する場合や作業ユニットに対して各種操作を行う場合にフレームが妨げにならないので、整備作業の作業性及び各種操作の操作性が向上する。
【0015】
前記駆動手段は、前記一対の操舵輪のそれぞれに設けられた駆動部を有し、前記駆動部が前記一対の操舵輪の各操舵輪の内周側に配置されてもよい。この態様によれば、操舵輪毎に駆動部が設けられているので、各操舵輪を独立して駆動制御できる。また、駆動部が操舵輪の内周側に配置されているので、駆動部から各操舵輪までに至る複雑な動力伝達経路が不要になるので構造が簡略化されかつ操舵駆動装置の小型化に貢献できる。
【0016】
作業ユニットが行う作業内容に格別の制限はない。例えば、作業ユニットとして、床や路面の掃除を行う掃除ユニットや除雪を行う除雪ユニットを本発明の作業車に搭載することができる。また、前記作業ユニットとして、前記一対の操舵輪よりも車体前方に配置された芝刈りユニットが設けられ、前記芝刈りユニットには、前記非操舵輪として、前記車幅方向に互いに隣接して配置され、直径よりも前記車幅方向の寸法が大きい一対の回転体が設けられ、前記一対の回転体よりも前方に芝を刈るための刈刃部が設けられてもよい。この態様によれば、ゴルフ場のグリーンの芝を刈る場合のように、ある程度の広さを持つ芝面に対して作業車を往復移動させて芝刈りする場合、芝の刈り残しを防止するため往復時に芝刈り範囲をオーバーラップさせることが一般的である。この態様の作業車によれば、一対の回転体上の任意の一点を中心として作業車を180度旋回できるので、旋回の終了と同時に芝刈り範囲のオーバーラップを設定できる。そのため、オーバーラップの設定作業を旋回後に特に行う必要がない。これにより、効率的な芝刈り作業が可能となる。
【0017】
作業ユニットとして、芝刈りユニットが搭載される場合、前記操舵手段は、前記一対の操舵輪の各操舵輪について、キャスター角が0に設定され、キングピン軸が回転軸線と直交するように設定され、かつ前記キングピン軸が車輪幅の中央から離れた所定位置に設定されることが好ましい。この場合には、作業車を180度旋回させるために、作業車を停止させた状態で操舵する場合、各操舵輪は転がりながら方向転換できる。従って、芝面と操舵輪との摩擦抵抗を低減できるため、芝面を荒らすことを防止できる。
【0018】
この所定位置は、前記一対の操舵輪の各操舵輪が路面に接触する接触領域の境界上の位置又は当該境界に近接した位置であってもよい。この場合には、作業車を停止させた操舵時に各操舵輪と芝面との摩擦を極力低減させながら各操舵輪を転がすことができる。そのため、各操舵輪と芝面との摩擦によって芝面を荒らすことを防止できる。しかも、操舵輪から遠く離れた位置にキングピン軸が設定される場合に比べて操舵輪からキングピン軸の位置までの距離を短くできるため、各操舵輪の方向転換時の回転半径を小さくできる。これにより、操舵駆動装置の小型化に貢献できる。
【発明の効果】
【0019】
以上説明したように、本発明の作業車によれば、各操舵輪の転舵角を適宜設定し、少なくとも一つの操舵輪を回転駆動することによって、各操舵輪の回転軸線が交わる非操舵輪上の任意の一点を中心として旋回できる。これにより、作業ユニットの作業内容に適した旋回が可能となるので、作業車の実用性を高めることができる。
【図面の簡単な説明】
【0020】
【図1】本発明の一形態に係る芝刈り作業車を示した図。
【図2】図1の芝刈り作業車を矢印II方向から示した図。
【図3】図1の芝刈り作業車を矢印III方向から示した図。
【図4】ドラム式車輪の断面図。
【図5】操舵部を車幅方向から示した拡大図。
【図6】操舵部を車体後方から示した拡大図。
【図7】芝刈り作業車の走行及び旋回パターンを示した図。
【図8】第1ピボットターンの詳細を示した図。
【図9】左回りの第2ピボットターンの詳細を示した図。
【図10】右回りの第2ピボットターンの詳細を示した図。
【図11A】昇降装置の詳細及び刈刃部を上昇させた状態を示した図。
【図11B】昇降装置の詳細及びドラム式車輪を上昇させた状態を示した図。
【図12】位置切替部材と位置調整ピンとを利用した形態を示した図。
【図13】初期状態のジャッキ装置を示した斜視図。
【図14】リフト状態のジャッキ装置を示した斜視図。
【図15】ジャッキ装置を芝刈り作業車に装着した状態を示した斜視図。
【図16】フリーエンコーダの一部を示した斜視図。
【図17】フリーエンコーダの機械的動作を示した断面図。
【図18】芝刈りユニットの刈刃クラッチを操作する操作機構を示した図。
【図19】芝刈りユニットのブレーキを操作する操作機構を示した図。
【発明を実施するための形態】
【0021】
図1〜図3に示すように、芝刈り作業車1は、作業ユニットとしての芝刈りユニット2と、芝刈りユニット2とともに走行可能な本体3とを備えている。芝刈り作業車1の車体前後方向は図1の左右方向に、車体上下方向は図1の上下方向に、車幅方向又は左右方向は図2の上下方向にそれぞれ相当する。芝刈り作業車1の各部品の左右を区別するために参照符号にL、Rを付加する場合がある。芝刈り作業車1は無線操縦モード、手動操縦モード及び自律走行モードの間で運転モードを切り替え可能である。ユーザはこれらのモードを用途に合わせて選択して芝刈り作業車1を使用できる。芝刈りユニット2は芝刈り作業を行うリール式の芝刈機を基礎として構成されている。本体3は、芝刈りユニット2に連結されたフレーム10と、フレーム10に設けられた操舵駆動装置11と、各種の電子機器や周辺装置を含んだ電装ユニット12と、芝刈り作業車1を操作するための操作ユニット13とを有する。なお、便宜上、各図において電装ユニット12の具体的かつ詳細な図示を省略した。また、図2及び図3おいては操作ユニット13の図示を省略した。
【0022】
芝刈りユニット2はベース15(図2参照)を有し、このベース15には芝刈り作業を行うための各種の機器が設けられている。芝刈りユニット2はベース15に搭載されたエンジン16と、エンジン16の出力を変速して各部に伝達する変速機17とを含む。変速機17から出力された動力は左右のドラム式車輪18L、18Rに伝達されるとともに、円筒状の刈刃部20に伝達される。刈刃部20は螺旋状の複数の刈刃20aが円筒状の骨格に取り付けられることにより構成されている。
【0023】
図4にも示したように、ドラム式車輪18L、18Rは、車幅方向に延びる軸線Ax1を回転中心として回転駆動される非操舵輪として構成されている。ドラム式車輪18L、18Rは直径よりも車幅方向の寸法が大きくなるように形成されている。これにより、芝面への接触圧を減少させ、芝面の損傷を軽減できる。ドラム式車輪18L、18Rは、車幅方向に互いに隣接して配置され、連結機構21によって互いに相対回転な状態で連結されている。ドラム式車輪18L、18Rは車幅方向に突出する車軸25L、25Rを有している。変速機17と車軸25L、25Rとの間の動力伝達経路には不図示のディファレンシャル機構が設けられている。このディファレンシャル機構によってドラム式車輪18L、18Rは差動回転できる。一対のドラム式車輪18L、18Rは一対の回転体に相当する。
【0024】
ドラム式車輪18L、18Rの前方にはサッチングローラ26及びスムージングローラ27が配置されている。サッチングローラ26は芝生内に入り込んだ刈かすを除去する。スムージングローラ27はベース15に対して昇降可能に取り付けられていて、スムージングローラ27によって刈刃部20による芝の刈り取り長さを調整できる。刈刃部20にて刈り取られた芝の刈かすは、不図示のカバーにて前方に案内されてから芝刈りユニット2の前端部に設けられた収集排出装置30に収集される。収集排出装置30には芝の刈かすが流入する流入口31が形成されている。
【0025】
図1及び図2に示すように、フレーム10はドラム式車輪18の車軸25に対して回転自在に取り付けられている。これによりフレーム10は軸線Ax1の回りを回転可能な状態かつ軸線Ax1の方向に移動不能な状態で作業ユニット2に連結される。これにより、芝刈りユニット2に対してフレーム10が軸線Ax1の回りを回転して車体前後方向の路面の凹凸を吸収できる。そのため、芝刈り作業車1の路面追従性が向上する。フレーム10は芝刈りユニット2に対する連結位置から斜め上方に延びる傾斜部35と、傾斜部35から水平方向に延びる水平部36とを有している。フレーム10が傾斜部35を有しているので、芝刈りユニット2の真上にフレーム10等の構造物が位置しない。このため、芝刈りユニット2の上部を露出させることが容易となり、芝刈りユニット2を整備する場合や芝刈りユニット2に対して各種操作を行う場合にフレーム10が妨げにならないので整備作業の作業性及び各種操作の操作性が向上する。水平部36には電装ユニット12及び操作ユニット13がそれぞれ配置される。水平部36の前端にはラック部37が取り付けられている。ラック部37の上部には電装ユニット12のGPSアンテナ12a及び無線アンテナ12bがそれぞれ取り付けられている。また、ラック部37の上部には不図示の生物検知センサ及びヘッドライトがそれぞれ取り付けられている。
【0026】
操舵駆動装置11は、車幅方向に配置された一対の操舵輪40L、40Rと、各操舵輪40L、40Rを独立して転舵するための操舵部41L、41Rと、各操舵輪40L、40Rを駆動する車輪駆動部42L、42Rと、を備えている。操舵駆動装置11の左右一対の構成要素は左右対称の構造である。左右の操舵部41L、41Rを一組としたものが操舵手段に相当し、左右の車輪駆動部42L、42Rを一組としたものが駆動手段に相当する。各操舵輪40は円筒状の本体40aの外周面に合成ゴム40bが焼き付けられることにより構成されている。各操舵輪40のコーナーが面取りされることにより各操舵輪40にはショルダー部40cが形成される。操舵輪40L、40Rは、操舵部41L、41Rを介して揺動部材44に取り付けられている。
【0027】
図1及び図3に示すように、揺動部材44は車幅方向に延びている部材である。揺動部材44は、その中央を通り車体前後方向に延びる揺動軸線Ax2を中心として揺動可能な状態でフレーム10に連結されている。これにより、車幅方向の路面の凹凸や傾きを揺動部材44が揺動することによって吸収できるので、芝刈り作業車1の路面追従性が向上する。具体的には、揺動部材44の中央を貫く揺動軸45が、フレーム10に固定されたブラケット46に不図示の軸受を介して取り付けられることによって、揺動部材44がフレーム10に連結されている。揺動部材44の中心部を基準として左右対称に操舵部41L、41Rが取り付けられている。
【0028】
操舵部41は、車軸48の中心を通る回転軸線Ax3の回りに回転可能に操舵輪40を支持するハブキャリア50と、ハブキャリア50に一端が固定され、他端が上方に延びて揺動部材44に回転自在に設けられた旋回軸51と、旋回軸51を回転駆動する操舵機構52とを備えている。操舵機構52は、駆動源である電動モータ53と、電動モータ53の回転を旋回軸51に伝達する伝達機構54と、旋回軸51の回転角度、即ち操舵輪40の転舵角を検出する回転角度センサ55とを備えている。図5及び図6にも示すように、伝達機構54は電動モータ53に連結された駆動プーリ54aと、旋回軸51の先端部に連結された被駆動プーリ54bと、駆動プーリ54a及び被駆動プーリ54bに掛け渡されたベルト54cと、ベルト54cの張力を調整するテンションプーリ54dとを備えている。駆動プーリ54a及び被駆動プーリ54bはそれぞれ歯付きプーリであり、ベルト54cは各プーリ54a、54bに噛み合う歯付きベルトである。
【0029】
図5及び図6に示すように、操舵部41は、旋回軸51がキングピン軸Kpに一致している。そして、キャスター角が0度であり、キングピン軸KPが回転軸線Ax3と直交している。キャスター角が0度であると、それ以外の場合に比べて操舵時の芝面と操舵輪40との摩擦抵抗を低減できるので、芝面を荒らすことを抑えることができる。また、キングピン軸Kpが回転軸線Ax3と直交しているから、芝刈り作業車1が停止した状態での操舵時の操舵輪40と芝面との摩擦範囲を、キングピン軸Kpが回転軸線Ax3から離れた位置、例えばキングピン軸Kpが回転軸線Ax3よりも前方又は後方に離れた位置に設定される場合に比べて小さくすることができる。
【0030】
また、図6に示すように、操舵部41は、キングピン軸Kpが操舵輪40の車輪幅の中央Cから離れた位置に設定されている。本形態では、操舵輪40が平面状の路面に接触する接触領域ARの境界Pに近接する操舵輪40の幅方向の端に、キングピン軸Kpが設定されている。このような位置にキングピン軸Kpが設定されることにより、芝刈り作業車1が停止した状態で操舵した場合に操舵輪40は転がりながら方向転換でき、芝面との摩擦を極力低減できる。しかも、操舵輪40から遠く離れた位置にキングピン軸Kpが設定される場合に比べて操舵輪40からキングピン軸Kpの位置までの距離を短くできるため、操舵輪40の方向転換時の回転半径を小さくできる。これにより、操舵駆動装置11の小型化に貢献できる。キングピン軸Kpの位置を境界Pに設定しても上記とほとんど同じ効果を得ることができる。
【0031】
図3に示したように、車輪駆動部42は、ハブキャリア50に取り付けられた電動モータ60と、電動モータ60の回転を減速して操舵輪40の車軸48に伝達する減速機61とを備えている。電動モータ60及び減速機61は操舵輪40の半径方向外側にはみ出ずに、操舵輪40の内周側に収まっている。つまり車輪駆動部42は操舵輪40の内周側に配置されている。そのため、車輪駆動部42から操舵輪40までに至る複雑な動力伝達経路が不要になるので構造が簡略化されかつ小型化に貢献できる。
【0032】
以上説明したように、芝刈り作業車1は一対の操舵輪40L、40Rを独立して転舵及び駆動できる操舵駆動装置11を備えているので、芝刈り作業車1は芝刈り作業に適した走行及び旋回ができる。図7に示すように、各操舵輪40L、40Rの転舵角及び回転駆動方向を適宜設定することにより、従来からの作業車と同様の走行が可能である。即ち、芝刈り作業車1は、(a)直線走行、(b)左旋回走行、及び(c)右旋回走行がそれぞれ可能である。また、芝刈り作業車1を停止させた状態で旋回させる場合、各操舵輪40L、40Rの回転軸線が交わり、かつ一対のドラム式車輪18L、18R上の任意の一点を中心として旋回が可能である。例えば、芝刈り作業車1は、(d)一対のドラム式車輪18L、18Rの境目を旋回中心Tcとした左回りのピボットターン、(e)一対のドラム式車輪18L、18Rの境目を旋回中心Tcとした右回りのピボットターン、(f)左のドラム式車輪18Lの左端部を旋回中心Tcとした左回りのピボットターン、及び(g)右のドラム式車輪18Rの右端部を旋回中心Tcとした右回りのピボットターンがそれぞれ可能である。
【0033】
図7の(d)及び(e)のピボットターンは、180度旋回した場合に左右方向に位置をずらさずに芝刈り作業車1を反転させる。これを第1ピボットターンと呼ぶ。図8に示すように、第1ピボットターンにおいて、芝刈り作業車1は各操舵輪40L、40Rが走行軌跡CL、CRを一致させて走行しながら旋回中心Tcを中心として旋回する。第1ピボットターンは、一対のドラム式車輪18L、18Rの境目が旋回中心Tcとなるので、旋回の前後で一対のドラム式車輪18L、18Rが入れ替わるが左右方向に位置ずれしない。
【0034】
一方、図7の(f)及び(g)のピボットターンは、180度旋回した場合に左右方向に位置をずらして芝刈り作業車1を反転させる。これを第2ピボットターンと呼ぶ。図9及び図10に示すように、第2ピボットターンにおいて、芝刈り作業車1は各操舵輪40L、40Rが走行軌跡CL、CRに沿って走行しながら旋回中心Tcを中心として旋回する。第2ピボットターンは、旋回の前後で一対のドラム式車輪18L、18Rが右方向又は左方向にずれる。図9及び図10に示すように、ドラム式車輪18の端部からの旋回中心Tcまでの距離をオフセットXとした場合、ドラム式車輪18の旋回前後のオーバーラップOLはオフセットXの2倍となる。刈刃部20(図2参照)の横幅は、一対のドラム式車輪18L、18Rの軸方向の合計寸法と等しいので、図9又は図10のオーバーラップOLは刈刃部20による芝刈り範囲のオーバーラップと等しい。
【0035】
例えば、ゴルフ場のグリーンの芝を刈る場合のように、ある程度の広さを持つ芝面に対して芝刈り作業車1を往復移動させて芝刈りする場合、芝の刈り残しを防止するため往復時に芝刈り範囲をオーバーラップさせることが一般的である。芝刈り作業車1は、上記のようにオフセットXを各操舵輪40L、40Rの転舵角によって設定して、第2ピボットターンを行うことができる。従って、第2ピボットターンの終了と同時に芝刈り範囲のオーバーラップを設定できるため、オーバーラップの設定作業を旋回後に特に行う必要がない。これにより、効率的な芝刈り作業が可能となる。
【0036】
図1及び図2示すように、芝刈り作業車1には、芝刈りユニット2を昇降させる昇降装置65が設けられている。昇降装置65は、芝刈りユニット2に設けられた第1支持部66と、本体3の一部であるフレーム10に設けられた第2支持部67と、第1支持部66と第2支持部67との間に設けられた駆動機構としてのリニアアクチュエータ68とを備えている。リニアアクチュエータ68は、駆動源を有する本体部69と、本体部69に組み付けられた伸縮ロッド70とを有する。伸縮ロッド70の先端部70aは第1支持部66にリンク結合され、本体部69の後端部69aは第2支持部67にリンク結合されている。先端部70aが第1端部に、後端部69aが第2端部にそれぞれ相当する。リニアアクチュエータ68は伸縮ロッド70を本体部69に対して設計範囲内においてストロークさせることができる。これにより、リニアアクチュエータ68は伸縮ロッド70の先端部70aと、本体部69の後端部69aとの距離を変化させることができる。本形態においては、芝刈りユニット2のドラム式車輪18及びスムージングローラ27がそれぞれ路面に接触し、かつ操舵輪40が路面に接触している状態を基準とした伸縮ロッド70の先端部70aと本体部69の後端部69aとの距離が基準距離に相当する。
【0037】
図11Aにも示したように、第1支持部66には、伸縮ロッド70の先端部70aの結合位置の拘束とその解除を行う拘束具71が取り付けられている。先端部70aの結合位置を変化させるため、第1支持部66には上方向に湾曲した長孔72が形成されている。この長孔72の範囲内で伸縮ロッド70の先端部70aの結合位置を変化させることができる。この結合位置を調整する場合には、まず拘束具71を解除状態として、長孔72に沿って結合位置を変更する。次に、変更後の結合位置にて拘束具71を解除状態から拘束状態へ切り替える。これにより、結合位置を所望の位置に調整できる。拘束具71と長孔72とを組み合わせたものが位置調整機構に相当する。
【0038】
図11Aに示すように、ドラム式車輪18及び操舵輪40がそれぞれ路面に接触した状態からリニアアクチュエータ68の伸縮ロッド70を2点鎖線の位置まで縮めると、ドラム式車輪18が路面に接触した状態のまま芝刈りユニット2が軸線Ax1を中心として上方に回転しながら持ち上げられる。これにより刈刃部20が路面から浮かぶため、芝刈り作業を中断できる。そして、刈刃部20が路面から浮いた状態から、伸縮ロッド70を実線で示した元の長さに戻すことにより、刈刃部20を路面に接触させて芝刈り作業を再開できる。また、昇降装置65を利用して刃部20を芝面から浮かせた状態であれば、芝刈り作業車1にピボットターンをさせても刈刃部20が芝面に接触したまま引き摺られることがない。従って、芝刈り作業車1のピボットターン時に芝面を著しく傷つけることを防止できる。なお、刈刃部20のリフト量h1は、伸縮ロッド70のストローク又は先端部70aの結合位置の調整によって変更可能である。
【0039】
一方、図11Bに示すように、ドラム式車輪18及び操舵輪40が路面にそれぞれ接触し、かつ芝刈り作業車1が停止した状態からリニアアクチュエータ68の伸縮ロッド70を矢印方向に延長すると、芝刈りユニット2がスムージングローラ27を支点として図11Aの場合とは反対回りに回転する。これにより、スムージングローラ27及び操舵輪40を路面に接触させた状態でドラム式車輪18を路面から浮かすことができる。スムージングローラ27が芝刈りユニット2の回転動作の支点となるため、ドラム式車輪18の浮上動作時に芝刈りユニット2が芝面に噛み込む等の不具合の発生を防止できる。ドラム式車輪18のリフト量h2は伸縮ロッド70のストローク又は先端部70aの結合位置の調整によって変更可能である。なお、図11Bの浮上動作を行うにあたり、リニアアクチュエータ68のストローク量が足りない場合は、伸縮ロッド70の先端部70aの結合位置を車体後方側へ調整することによってストローク量の不足を補うことができる。
【0040】
芝刈り作業車1は、ドラム式車輪18よりも直径が大きな移動用車輪Twを車軸25に着脱できるように構成されている。昇降装置65にてドラム式車輪18を浮かせることができるので、移動用車輪Twを着脱する際に油圧ジャッキ等の装置を利用して芝刈りユニット2をジャッキアップする必要がない。従って、芝刈り作業車1の実用性が向上する。また、伸縮ロッド70の先端部70aの結合位置を調整することにより、リニアアクチュエータ68のストローク量に対する各リフト量h1、h2を変化させることができる。また、同調整によって、リニアアクチュエータ68の作動時の負荷を調整することもできる。
【0041】
伸縮ロッド70の先端部70aの結合位置を、図11Aの態様に適した位置と図11Bの態様に適した位置との間で選択的に切り替えることも可能である。このような切り替えは図12に示した板状の位置切替部材73と位置調整ピン74とを連係させることで実現できる。位置切替部材73は、伸縮ロッド70を挟んで第1支持部66の反対側に位置するようにして芝刈りユニット2に取り付けられる。位置切替部材73には、第1支持部66に形成された長孔72と重なる位置に2つの長孔72A及び長孔72Bが形成されている。長孔72Aは車体前方側でかつ図11Aに示した刈刃部20の昇降時に適した位置に配置されている。長孔72Bは車体後方側でかつ図11Bに示した車輪18の浮上動作時に適した位置に配置されている。位置調整ピン74は伸縮ロッド70の先端部70aを貫いた状態で長孔72A及び長孔72Bに対して抜き差しできる。従って、刈刃部20を昇降させる場合(図11A参照)には位置調整ピン74を長孔72Aに挿入する。これにより、伸縮ロッド70の先端部70aが長孔72Aの範囲で位置決めされ、位置調整ピン74が作用点となって刈刃部20を昇降させることができる。一方、車輪18を浮上させる場合(図11B参照)には、位置調整ピン74を長孔72Aから抜いて、長孔72Bに挿入する。これにより、伸縮ロッド70の先端部70aが長孔72Bの範囲で位置決めされ、位置調整ピン74が作用点となって車輪18の浮上が可能となる。この形態においては、位置切替部材73の各長孔72A、72Bと位置調整ピン74とを組み合わせたものが位置調整機構に相当する。なお、長孔72A又は長孔72Bに位置調整ピン74が挿入された状態で、拘束具71を用いて先端部70aの結合位置を微調整することも可能である。また、長孔72A又は長孔72Bと位置調整ピン74との遊びを無くすこともできる。
【0042】
図2に示したように、芝刈りユニット2の重心Gは中央よりも左側に位置している。即ち、芝刈りユニット2の重量配分は軸線Ax1の方向の中央から左側に偏っている。昇降装置65の第1支持部66及び第2支持部67は、それぞれ重量配分が偏る左側に位置し、かつ車体前後方向に並んでいる。そのため、昇降装置65による芝刈りユニット2の昇降中に車幅方向のバランスが崩れ難い。これにより、芝刈りユニット2の昇降動作が安定する。なお、各支持部66、67を重心線と交差し、かつ車体前後方向に延びる直線上に配置することもできる。この場合には、昇降時の作業ユニット2の車幅方向のバランスが完全に釣り合うので、作業ユニット2の昇降動作の安定性が更に向上する。
【0043】
図13〜図15に示すように、芝刈り作業車1は、操舵輪40を路面から浮かすためのジャッキ装置75を着脱できる。ジャッキ装置75はスライドベース76と、そのスライドベース76に対して平行に配置された下部ベース77とを有している。ジャッキ装置75は、スライドベース76が芝刈り作業車1の側のホルダー装置78に対してスライドしながら装着されることにより、芝刈り作業車1に対して着脱される(図15参照)。ホルダー装置78は左右の操舵輪40L、40Rの間に配置され、スライド方向を車体前後方向に一致させた状態でフレーム10の水平部36に固定されている。ホルダー装置78は、ジャッキ装置75が装着された場合に車幅方向及び上下方向の移動を拘束できるように、スライドベース76と噛み合うことができる。
【0044】
ジャッキ装置75は、スライドベース76と下部ベース77とを平行に保ちながらこれらの間隔を図13の状態から図14の状態へ変更可能なジャッキ機構部80と、下部ベース77に設けられたキャスター部81とを更に備えている。ジャッキ機構部80は駆動モータ80aの動力を利用して、スライドベース76と下部ベース77との間に介在するリンク機構80bを上下動させる周知の機構である。キャスター部81は、上下方向に延びて下部ベース77に回転自在に取り付けられた旋回軸81aと、図14のように向きが変化した状態から直進状態の基準位置にばね力を利用して復帰させる戻り機構81bとを有している。
【0045】
図13に示した初期状態のジャッキ装置75を芝刈り作業車1に装着してからジャッキ機構部80を作動させて図14のリフト状態に変化させる。これにより、図15に示すように、各操舵輪40L、40Rを路面から浮かすことができる。上述した移動用車輪Tw(図11B参照)が装着された状態で、ジャッキ装置75にて各操舵輪40L、40Rをジャッキアップすることにより、芝刈り作業車1は左右の移動用車輪Twと、キャスター部81とによって支持される。これにより、芝刈り作業車1を移動用車輪Twに出力されるエンジン16の駆動力によって又は人力によって無理なく移動させることが可能になる。
【0046】
図1に示したように、芝刈り作業車1はその走行状態を検出するため、前輪側エンコーダ111、後輪側エンコーダ112及びこれらの中間に位置するフリーエンコーダ113が設けられている。前輪側エンコーダ111は左右のドラム式車輪18L、18Rの車輪毎に設けられ、後輪側エンコーダ112は左右の操舵輪40L、40Rの車輪毎に設けられている。フリーエンコーダ113は車幅方向の中央に一つ設けられている。
【0047】
上述したように、ドラム式車輪18L、18Rは、互いに差回転しかつそれぞれ駆動トルクを発生する。前輪側エンコーダ111を用いて差回転や各車輪のスキッドを検出できる。それにより、ドラム式車輪18L、18Rの駆動制御の精度向上を図ることができるとともに、一対の操舵輪40L、40Rを駆動させるタイミングを得ることができる。一対の操舵輪40L、40Rは独立に駆動できるため、芝刈り作業車1の前後進時や旋回時に差回転やスキッドが発生する。後輪側エンコーダ112を用いて差回転や各車輪のスキッドを検出することができる。これにより、芝刈り作業車1を予定した走行軌跡に正確に合わせた各操舵輪40L、40Rの駆動制御が可能になる。
【0048】
図1に示したように、フリーエンコーダ113は駆動力を持たずに自由に回転できるキャスター構造である。そのため、束縛のない自然な転がりが得られる。図16及び図17にも示したように、フリーエンコーダ113は、上下方向に延びて回転自在な旋回軸114と、上下方向のストロークSh(図17参照)を許容するサスペンション115を有している。そのため、芝刈り作業車1の進行方向の変化や路面の変化に容易に追従することができる。従って、芝刈り作業車1の正確な走行状態を検出することが可能となる。一般に、車両の走行状態の検出するセンサとして、路面へ検査光を照射し、その反射光に基づいて位置情報を検出する光学的センサが従来から知られている。しかし芝刈り作業車1は芝面を走行するものであるから、こうした光学的センサを用いても芝面からの反射光が乱れるため検査精度を確保することが難しい。従って、上述のように路面追従性が高められたフリーエンコーダ113は芝刈り作業車1への適用に有効である。
【0049】
図1に示した操作ユニット13は、芝刈りユニット2の操作について手動操作と自動操作とを兼用できる操作機構120、140を備えている。図18に示したように、操作機構120は芝刈りユニット2の例えば刈刃クラッチCLを操作するための操作レバー122を有している。操作レバー122は回転軸122aの回りに回転できる。刈刃クラッチCLと操作レバー122とはワイヤ123を介して連結されている。ワイヤ123の端部123aには過大な操作力の入力を抑制するコイルばね124が設けられている。コイルばね124は操作レバー122の操作力を伝達する中間機構125に連結されている。従って、ユーザが操作レバー122を矢印方向に回転させると、その操作力が中間機構125を介してワイヤ123に伝達されてワイヤ123が引っ張られる。これにより、刈刃クラッチCLを手動で操作できる。
【0050】
操作機構120は、刈刃クラッチCLを自動で操作するため、駆動機構としてのロータリーアクチュエータ131と、操作レバー122とロータリーアクチュエータ131との間に介在する介在部材132とを更に備えている。介在部材132は一端が操作レバー122にリンク結合されるとともに、他端が長孔133を介してロータリーアクチュエータ131のピン131aに結合されている。ピン131aは介在部材132の長孔に対して滑りながら相対回転可能な状態で結合されている。ロータリーアクチュエータ131が矢印方向に回転すると、介在部材132が矢印方向に移動して、操作レバー122を矢印方向に回転させることができる。そのため、ロータリーアクチュエータ131を制御することによって、刈刃クラッチCLを自動操作できる。ロータリーアクチュエータ131のピン131aと介在部材132とは長孔133の両端部を移動の限度として相対移動可能である。従って、操作レバー122を手動で動かした場合には、介在部材132がピン131aに対して相対移動する。それにより、操作レバー122に対する手動操作に伴う操作力はロータリーアクチュエータ131に入力されない。そのため、刈刃クラッチCLに対して手動操作と自動操作とを操作機構120にて兼用できる。
【0051】
図19に示したように、操作機構140は芝刈りユニット2の例えばブレーキBKを操作する操作レバー142を有している。操作レバー142は回転軸142aの回りに回転できる。ブレーキBKと操作レバー122との間にはワイヤ143が介在している。ワイヤ143の一端は操作レバー142に連結されており、ワイヤ143の他端は中間部材145を介してブレーキBKに連結されている。中間部材145にはワイヤ143の直径よりも若干大きな内径を持つ取り付け孔146が形成されている。ワイヤ143は取り付け孔146に挿入されており、その先端部には取り付け孔146の内径よりも十分に大きな抜け止め部材147が固定されている。これにより、操作レバー142が矢印方向に操作されるとワイヤ143が矢印方向に引かれる。ワイヤ143の先端部には抜け止め部材147が固定されているので、その抜け止め部材147が中間部材145に突き当たる。そのため、中間部材145が矢印方向に引かれてブレーキBKが矢印方向に操作される。これにより、ブレーキBKを手動で操作できる。ワイヤ143はブラケット148にて支持されており、そのブラケット148と中間部材145との間にはリターンスプリング149が装着されている。そのため、操作レバー142が操作位置から離されるとリターンスプリング149の弾性力によって、操作レバー142は元の位置に復帰する。
【0052】
操作機構140は、ブレーキBKを自動で操作するため、駆動機構としてのロータリーアクチュエータ151と、そのピン151aにリンク結合されたロッド152とを有している。中間部材145にはロッド152の直径よりも若干大きな内径を持つ取り付け孔155が形成されている。ロッド152は取り付け孔155に挿入されており、その先端部には取り付け孔155の内径よりも十分に大きな抜け止め部材156が固定されている。ロータリーアクチュエータ151が矢印方向に回転すると、ロッド152が矢印方向に引かれる。ロッド152の先端部には抜け止め部材156が固定されているので、抜け止め部材156が中間部材145に突き当たる。そのため、中間部材145が矢印方向に引かれてブレーキBKが矢印方向に操作される。従って、ロータリーアクチュエータ151を制御することによってブレーキBKを自動操作できる。中間部材145はロッド152の先端部に取り付けられた抜け止め部材156に突き当たらない限り、ロッド152が挿入された状態で自由に移動できる。そのため、操作レバー142に対する手動操作に伴う操作力はロータリーアクチュエータ151に入力されない。また、ロータリーアクチュエータ151による自動操作時も同様に、中間部材145はワイヤ143が挿入された状態で自由に移動できる。従って、ワイヤ143や操作レバー142は動かない。そのため、ブレーキBKに対して手動操作と自動操作とを操作機構140にて兼用できる。
【0053】
本発明は上記形態に限定されず、種々の形態にて実施できる。一対の操舵輪40L、40Rのいずれか一方の操舵輪のみを回転駆動する形態にて本発明を実施することもできる。いずれか一方の操舵輪を駆動できれば、上記形態と同様の走行及び旋回パターン(図7参照)を実現できる。また、床や路面の掃除を行う掃除ユニットを搭載した掃除作業車や除雪を行う除雪ユニットを搭載した除雪作業車として本発明を実施することもできる。キャスター角やキングピン軸の位置等の操舵輪に関するジオメトリは作業ユニットの作業内容に応じて適宜設定してよい。また、左右の非操舵輪は図4に示した形態に限定されない。例えば、直径よりも車幅方向の寸法が大きい左右の車輪のそれぞれを、一本の共通の車軸に対して回転自在に装着した形態にて非操舵輪を実施することも可能である。
【符号の説明】
【0054】
1 芝刈り作業車(作業車)
2 芝刈りユニット(作業ユニット)
10 フレーム
11 操舵駆動装置
18L、18R ドラム式車輪(非操舵輪)
40L、40R 操舵輪
42L、42R 車輪駆動部
Ax1 軸線
【特許請求の範囲】
【請求項1】
車幅方向に延びる軸線を回転中心として回転駆動される非操舵輪を有する作業ユニットと、前記作業ユニットに連結されたフレームと、前記フレームに設けられた操舵駆動装置と、を備え、
前記操舵駆動装置は、前記車幅方向に配置された一対の操舵輪と、前記一対の操舵輪の各操舵輪を独立して転舵可能な操舵手段と、前記一対の操舵輪の少なくとも一つの操舵輪を回転駆動できる駆動手段と、を備える作業車。
【請求項2】
車体前後方向に延びる揺動軸線を中心として揺動可能な状態で前記フレームに連結されて前記車幅方向に延びる揺動部材を更に備え、
前記一対の操舵輪は、前記操舵手段を介して前記揺動部材に設けられている請求項1の作業車。
【請求項3】
前記フレームは、前記軸線の回りを回転可能な状態 かつ前記軸線の方向に移動不能な状態で前記作業ユニットに連結されている請求項1又は2の作業車。
【請求項4】
前記操舵手段は、前記一対の操舵輪の各操舵輪について、キャスター角が0度に設定されている請求項1の作業車。
【請求項5】
前記操舵手段は、前記一対の操舵輪の各操舵輪について、キングピン軸が回転軸線と直交するように設定されている請求項4の作業車。
【請求項6】
前記操舵手段は、前記一対の操舵輪の各操舵輪について、前記キングピン軸が車輪幅の中央から離れた所定位置に設定されている請求項5の作業車。
【請求項7】
前記所定位置が、前記一対の操舵輪の各操舵輪が路面に接触する接触領域の境界上の位置又は当該境界に近接した位置である請求項6の作業車。
【請求項8】
前記フレームは、前記作業ユニットに連結されて、前記作業ユニットの斜め上方に延びる傾斜部を有する請求項1の作業車。
【請求項9】
前記駆動手段は、前記一対の操舵輪のそれぞれに設けられた駆動部を有し、前記駆動部が前記一対の操舵輪の各操舵輪の内周側に配置されている請求項1の作業車。
【請求項10】
前記作業ユニットとして、前記一対の操舵輪よりも車体前方に配置された芝刈りユニットが設けられ、
前記芝刈りユニットには、前記非操舵輪として、前記車幅方向に互いに隣接して配置され、直径よりも前記車幅方向の寸法が大きい一対の回転体が設けられ、前記一対の回転体よりも前方に芝を刈るための刈刃部が設けられている請求項1の作業車。
【請求項11】
前記操舵手段は、前記一対の操舵輪の各操舵輪について、キャスター角が0度に設定され、キングピン軸が回転軸線と直交するように設定され、かつ前記キングピン軸が車輪幅の中央から離れた所定位置に設定されている請求項10の作業車。
【請求項12】
前記所定位置が、前記一対の操舵輪の各操舵輪が路面に接触する接触領域の境界上の位置又は当該境界に近接した位置である請求項11の作業車。
【請求項1】
車幅方向に延びる軸線を回転中心として回転駆動される非操舵輪を有する作業ユニットと、前記作業ユニットに連結されたフレームと、前記フレームに設けられた操舵駆動装置と、を備え、
前記操舵駆動装置は、前記車幅方向に配置された一対の操舵輪と、前記一対の操舵輪の各操舵輪を独立して転舵可能な操舵手段と、前記一対の操舵輪の少なくとも一つの操舵輪を回転駆動できる駆動手段と、を備える作業車。
【請求項2】
車体前後方向に延びる揺動軸線を中心として揺動可能な状態で前記フレームに連結されて前記車幅方向に延びる揺動部材を更に備え、
前記一対の操舵輪は、前記操舵手段を介して前記揺動部材に設けられている請求項1の作業車。
【請求項3】
前記フレームは、前記軸線の回りを回転可能な状態 かつ前記軸線の方向に移動不能な状態で前記作業ユニットに連結されている請求項1又は2の作業車。
【請求項4】
前記操舵手段は、前記一対の操舵輪の各操舵輪について、キャスター角が0度に設定されている請求項1の作業車。
【請求項5】
前記操舵手段は、前記一対の操舵輪の各操舵輪について、キングピン軸が回転軸線と直交するように設定されている請求項4の作業車。
【請求項6】
前記操舵手段は、前記一対の操舵輪の各操舵輪について、前記キングピン軸が車輪幅の中央から離れた所定位置に設定されている請求項5の作業車。
【請求項7】
前記所定位置が、前記一対の操舵輪の各操舵輪が路面に接触する接触領域の境界上の位置又は当該境界に近接した位置である請求項6の作業車。
【請求項8】
前記フレームは、前記作業ユニットに連結されて、前記作業ユニットの斜め上方に延びる傾斜部を有する請求項1の作業車。
【請求項9】
前記駆動手段は、前記一対の操舵輪のそれぞれに設けられた駆動部を有し、前記駆動部が前記一対の操舵輪の各操舵輪の内周側に配置されている請求項1の作業車。
【請求項10】
前記作業ユニットとして、前記一対の操舵輪よりも車体前方に配置された芝刈りユニットが設けられ、
前記芝刈りユニットには、前記非操舵輪として、前記車幅方向に互いに隣接して配置され、直径よりも前記車幅方向の寸法が大きい一対の回転体が設けられ、前記一対の回転体よりも前方に芝を刈るための刈刃部が設けられている請求項1の作業車。
【請求項11】
前記操舵手段は、前記一対の操舵輪の各操舵輪について、キャスター角が0度に設定され、キングピン軸が回転軸線と直交するように設定され、かつ前記キングピン軸が車輪幅の中央から離れた所定位置に設定されている請求項10の作業車。
【請求項12】
前記所定位置が、前記一対の操舵輪の各操舵輪が路面に接触する接触領域の境界上の位置又は当該境界に近接した位置である請求項11の作業車。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11A】
【図11B】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11A】
【図11B】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−48612(P2013−48612A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−189837(P2011−189837)
【出願日】平成23年8月31日(2011.8.31)
【出願人】(000128946)マミヤ・オーピー株式会社 (122)
【出願人】(597106792)カリブデザインサービス有限会社 (1)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月31日(2011.8.31)
【出願人】(000128946)マミヤ・オーピー株式会社 (122)
【出願人】(597106792)カリブデザインサービス有限会社 (1)
【Fターム(参考)】
[ Back to top ]