
作業車
【課題】サーボコントロール装置の性能に対する信頼性を向上させることができるとともに、無段変速装置を容易に操作することができる作業車を提供することを目的とする。
【解決手段】サーボコントロール装置3は、シャトルレバーの操作位置をサーボバルブ13に機械的に伝達してサーボバルブ13を制御するシャトルアーム33と、変速レバーの操作位置をサーボバルブ13に機械的に伝達してサーボバルブ13を制御する変速アーム37と、サーボシリンダの動作をサーボバルブ13に機械的に伝達して、シャトルレバーで設定された走行方向で且つ変速レバーの操作位置に対応する位置にサーボシリンダが達すると、サーボバルブ13を中立位置に機械的に制御してサーボシリンダを停止させるフィードバック機構14と、を備える。
【解決手段】サーボコントロール装置3は、シャトルレバーの操作位置をサーボバルブ13に機械的に伝達してサーボバルブ13を制御するシャトルアーム33と、変速レバーの操作位置をサーボバルブ13に機械的に伝達してサーボバルブ13を制御する変速アーム37と、サーボシリンダの動作をサーボバルブ13に機械的に伝達して、シャトルレバーで設定された走行方向で且つ変速レバーの操作位置に対応する位置にサーボシリンダが達すると、サーボバルブ13を中立位置に機械的に制御してサーボシリンダを停止させるフィードバック機構14と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、作業車に関し、より詳細には、作業車における無段変速装置の操作構造に関する。
【背景技術】
【0002】
従来より、無段変速装置を備える作業車が公知となっている(例えば、特許文献1参照)。特許文献1に記載の静油圧式無段変速装置には、いわゆる電子式のサーボコントロール機構が備えられるとともに、走行方向及び走行速度を設定する変速操作具としての変速ペダルが備えられる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−92954号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術では、作業車が使用される過酷な環境(例えば、土や泥等が付着しやすい環境等)の影響により、サーボコントロール機構の性能に対する信頼性が低下する可能性がある。つまり、電子式のサーボコントロール機構に土や泥等が付着することにより、電気的な故障が発生する可能性がある。
【0005】
また、特許文献1に記載の技術では、走行方向及び走行速度の両方を単一の変速操作具としての変速ペダルで設定する構成であるため、例えば、走行速度を一定に維持しつつ走行方向を切り替えたい場合は、変速ペダルの踏み込み量は同じのままで踏み込み方向を切り替える操作をする必要がある。しかし、このような変速ペダルの操作は容易ではなく、変速ペダルの踏み込み方向を切り替えた時に踏み込み量が変わってしまい、走行速度を一定に維持することができないことがある。
【0006】
本発明は以上の如き状況に鑑みてなされたものであり、サーボコントロール装置の性能に対する信頼性を向上させることができるとともに、無段変速装置を容易に操作することができる作業車を提供することを目的とする。
【課題を解決するための手段】
【0007】
(構成)
本発明の第1特徴は、作業車において次のように構成することにある。前進側及び後進側に変速自在な走行用の無段変速装置と、人為的に操作されるもので前進又は後進の走行方向を設定する方向操作具と、人為的に操作されるもので走行速度を設定する変速操作具と、前記方向操作具及び前記変速操作具の操作位置に基づいて前記無段変速装置を制御するサーボコントロール装置と、を備え、前記サーボコントロール装置は、前記無段変速装置を制御する油圧アクチュエータと、前記油圧アクチュエータに作動油を給排して前記油圧アクチュエータを作動させるサーボバルブと、前記方向操作具の操作位置を前記サーボバルブに機械的に伝達して前記サーボバルブを制御する方向連係機構と、前記変速操作具の操作位置を前記サーボバルブに機械的に伝達して前記サーボバルブを制御する変速連係機構と、前記油圧アクチュエータの動作を前記サーボバルブに機械的に伝達して、前記方向操作具で設定された走行方向で且つ前記変速操作具の操作位置に対応する位置に前記油圧アクチュエータが達すると、前記サーボバルブを中立位置に機械的に制御して前記油圧アクチュエータを停止させるフィードバック機構と、を備える。
【0008】
(作用及び発明の効果)
本発明の第1特徴によると、サーボコントロール装置がフィードバック機構を備えるいわゆる機械式とされることにより、土や泥等の付着に起因する電気的な故障の発生を防いで、サーボコントロール装置の性能に対する信頼性を向上させることができる。また、走行方向と走行速度とをそれぞれ別々の方向操作具と変速操作具とで設定可能となるため、無段変速装置を容易に操作することができる。例えば、走行速度を一定に維持しつつ走行方向を切り替えたい場合は、変速操作具を操作せずに方向操作具だけを操作して、容易に操作することができる。
【0009】
(構成)
本発明の第2特徴は、本発明の第1特徴の作業車において次のように構成することにある。前記フィードバック機構は、その長手方向一端側に前記油圧アクチュエータが連結されるとともに、その長手方向中間部に前記サーボバルブが連結されるフィードバック部材と、前記フィードバック部材の長手方向他端側が連結されるとともに、前記方向連係機構及び前記変速連係機構が連結される連結部材と、を備える。
【0010】
(作用及び発明の効果)
本発明の第2特徴によると、油圧シリンダ、方向操作具及び変速操作具の動作がフィードバック部材に集約されてサーボバルブに伝達されるため、フィードバック機構に係る構造を簡素化することができる。
【0011】
(構成)
本発明の第3特徴は、本発明の第2特徴の作業車において次のように構成することにある。前記サーボコントロール装置は、前記フィードバック部材の中立位置と前記サーボバルブの中立位置とを調節可能に位置決めする位置決め機構を備える。
【0012】
(作用及び発明の効果)
本発明の第3特徴によると、フィードバック機構を構成する部材の部品精度を位置決めのためだけに上げる必要がないため、製造コストを低減することができる。また、長期間の使用による中立位置のズレを修正することができる。
【0013】
(構成)
本発明の第4特徴は、本発明の第1から第3特徴の作業車のうちのいずれか一つにおいて次のように構成することにある。前記サーボコントロール装置は、前記サーボバルブが前進位置又は後進位置に切り替えられる場合に作動油をリリーフする高圧リリーフバルブと、前記サーボバルブが中立位置に切り替えられる場合に前記高圧リリーフバルブよりも低い設定圧力で作動油をリリーフする低圧リリーフバルブと、を備える。
【0014】
(作用及び発明の効果)
本発明の第4特徴によると、サーボバルブが中立位置に切り替えられる場合には、低圧リリーフバルブによって低い設定圧力で作動油がリリーフされる。このため、例えば、走行速度が高い状態でサーボバルブが前進位置又は後進位置から中立位置を経て前進位置又は後進位置に切り替えられるときには、作動油の圧力が低い状態を経ることになる。よって、高圧の作動油による油圧アクチュエータの急激な作動を防止して、サーボバルブの切替時に生じる衝撃を低減することができる。
【0015】
(構成)
本発明の第5特徴は、本発明の第1から第4特徴の作業車のうちのいずれか一つにおいて次のように構成することにある。前記サーボコントロール装置は、前記サーボバルブを収容するバルブケースを備え、前記フィードバック機構は、前記バルブケースに支持される。
【0016】
(作用及び発明の効果)
本発明の第5特徴によると、フィードバック機構とバルブケースとがユニット化されるため、無段変速装置を容易に組み立てることができる。
【図面の簡単な説明】
【0017】
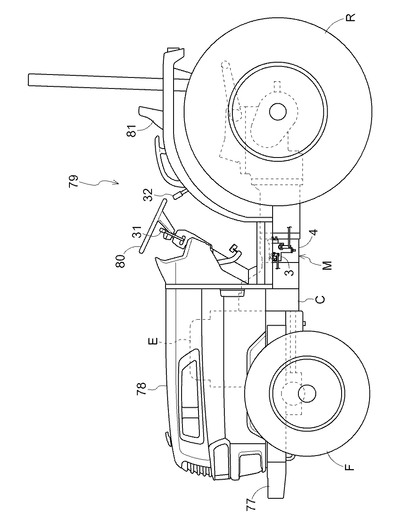
【図1】本発明の第一実施形態に係るトラクタを示す側面図。
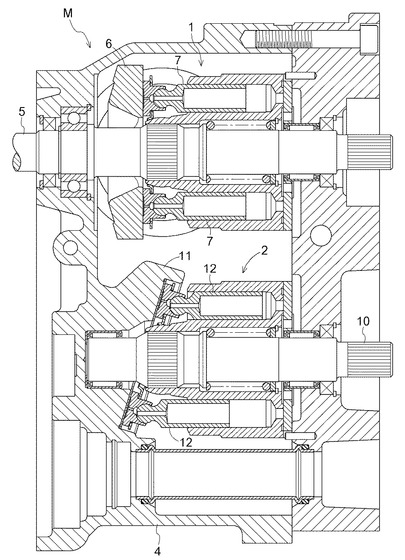
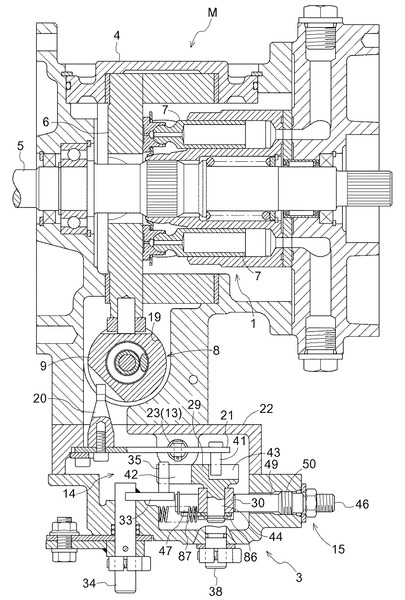
【図2】静油圧式無段変速装置を示す側面断面図。
【図3】静油圧式無段変速装置を示す平面断面図。
【図4】サーボコントロール装置を示す正面断面図。
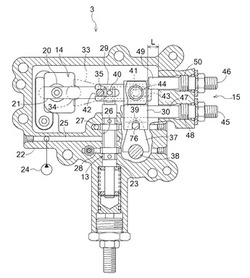
【図5】サーボコントロール装置を示す側面断面図。
【図6】サーボコントロール装置を示す側面図。
【図7】フィードバック機構を示す分解斜視図。
【図8】静油圧式無段変速装置の油圧回路を示す図。
【図9】(a)シャトルアームが前進位置である場合において変速アームが車速0位置であるときのサーボコントロール装置の動作態様を示す図。(b)同様の場合において変速アームが車速最大位置であるときであってサーボバルブが前進位置に切り替えられた状態のサーボコントロール装置の動作態様を示す図。(c)同様の場合において変速アームが車速最大位置であるときであってサーボバルブが中立位置に復帰した状態のサーボコントロール装置の動作態様を示す図。
【図10】(a)シャトルアームが中立位置である場合において変速アームが車速0位置であるときのサーボコントロール装置の動作態様を示す図。(b)同様の場合において変速アームが車速最大位置であるときのサーボコントロール装置の動作態様を示す図。
【図11】(a)シャトルアームが後進位置である場合において変速アームが車速0位置であるときのサーボコントロール装置の動作態様を示す図。(b)同様の場合において変速アームが車速最大位置であるときであってサーボバルブが後進位置に切り替えられた状態のサーボコントロール装置の動作態様を示す図。(c)同様の場合において変速アームが車速最大位置であるときであってサーボバルブが中立位置に復帰した状態のサーボコントロール装置の動作態様を示す図。
【図12】取付ロッド部と取付ネジ部との偏心量を示す断面図。
【図13】本発明の第二実施形態に係るサーボコントロール装置を示す側面断面図。
【図14】(a)本発明の第三実施形態に係るフィードバック機構を示す図。(b)同じく断面図。
【図15】(a)本発明の第四実施形態に係るフィードバック機構を示す図。(b)。同じく断面図。
【発明を実施するための形態】
【0018】
以下、本発明を実施するための形態について図面に基づき説明する。
【0019】
先ず、本発明の第一実施形態に係るトラクタの全体構成について、図1により説明する。
【0020】
図1に示すように、無段変速装置としての静油圧式無段変速装置Mは、作業車としてのトラクタに備えられる。なお、トラクタ以外の作業車としては、コンバイン、田植機等が挙げられる。トラクタは、機体フレーム77を備える。機体フレーム77には、前輪F及び後輪Rが備えられる。また、機体フレーム77の前部には、エンジンEが備えられる。エンジンEの後部には、クラッチハウジングCを介してミッションケース4が連結される。また、エンジンEは、ボンネット78で覆われる。ボンネット78の後部には、運転部79が備えられる。運転部79には、ステアリングハンドル80及び運転席81が備えられる。ステアリングハンドル80の左下側には、方向操作具としてのシャトルレバー31が備えられる。なお、シャトルレバー31は、運転席81の右側に配置されてもよい。また、運転席81の左側には、変速操作具としての変速レバー32が備えられる。
【0021】
次に、静油圧式無段変速装置Mについて、図2及び図3により説明する。
【0022】
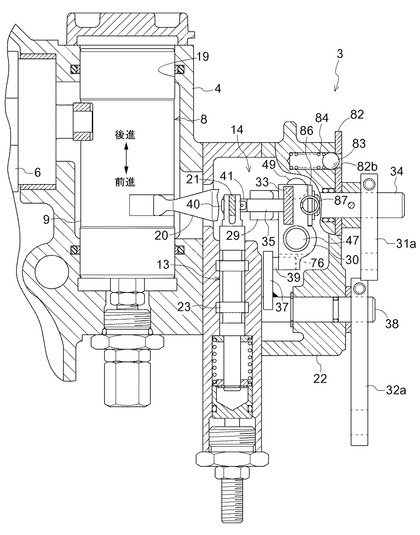
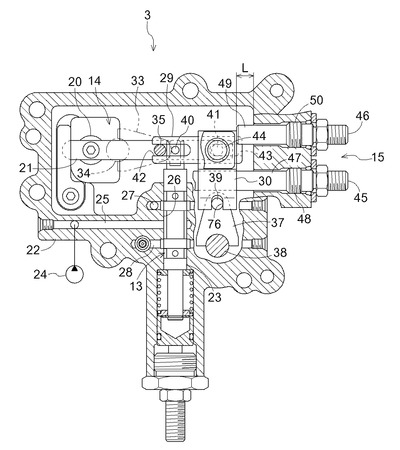
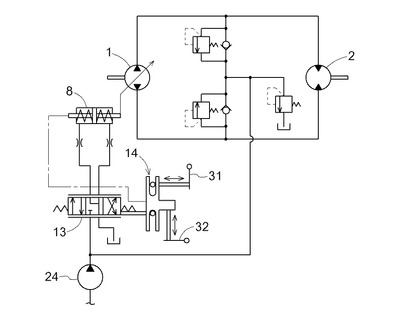
図2及び図3に示すように、静油圧式無段変速装置Mは、油圧ポンプ1と、油圧モータ2と、を備える。油圧ポンプ1及び油圧モータ2は、ミッションケース4内に収容される。ミッションケース4の側面には、サーボコントロール装置3が付設される。
【0023】
油圧ポンプ1は、可変容量ポンプである。油圧ポンプ1は、入力軸としてのポンプ軸5を備える。ポンプ軸5には、エンジンEの動力が入力される。また、ポンプ軸5には、斜板としてのポンプ斜板6が傾動可能に設けられる。ポンプ斜板6には、ポンププランジャ7が当接されるとともに、油圧アクチュエータとしてのサーボシリンダ8のサーボピストン9が連結される。こうして、ポンプ軸5とともにポンプ斜板6が回転して、ポンプ斜板6に押動力が作用することにより、ポンププランジャ7が往復動する。
【0024】
油圧モータ2は、可変容量モータである。油圧モータ2は、出力軸としてのモータ軸10を備える。モータ軸10には、モータ斜板11が傾動可能に設けられる。モータ斜板11には、モータプランジャ12が当接される。こうして、モータプランジャ12が往復動してモータ斜板11に回転力が作用することにより、モータ軸10が回転する。
【0025】
次に、サーボコントロール装置3について、図4から図8により説明する。
【0026】
図4から図8に示すように、サーボコントロール装置3は、サーボシリンダ8と、サーボバルブ13と、フィードバック機構14と、位置決め機構15と、を備える。
【0027】
サーボシリンダ8は、油圧シリンダである。サーボシリンダ8は、サーボピストン9を備える。サーボピストン9は、ミッションケース4に形成されるピストン孔19に摺動可能に内挿される。サーボピストン9には、ポンプ斜板6が連結されるとともに、連結ロッド20を介してフィードバックレバー21の長手方向一端側が連結される。
【0028】
サーボバルブ13は、スプールバルブである。サーボバルブ13は、サーボスプール23を備える。サーボバルブ13は、バルブケース22内に収容される。バルブケース22には、油圧源24からの作動油が流れるメイン油路25、サーボ油路26、前進側ポート27及び後進側ポート28が形成される。メイン油路25と、前進側ポート27及び後進側ポート28とは、サーボ油路26を介して連通可能に接続される。サーボ油路26には、サーボスプール23が摺動可能に内挿される。
【0029】
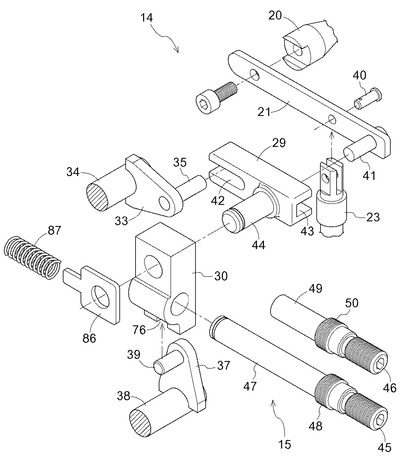
フィードバック機構14は、フィードバック部材としてのフィードバックレバー21と、連結部材としての連結フォーク29と、連結ブロック30と、を備える。連結フォーク29には、シャトルレバー31がシャトルアーム33を介して連結されるとともに、変速レバー32が変速アーム37を介して連結される。
【0030】
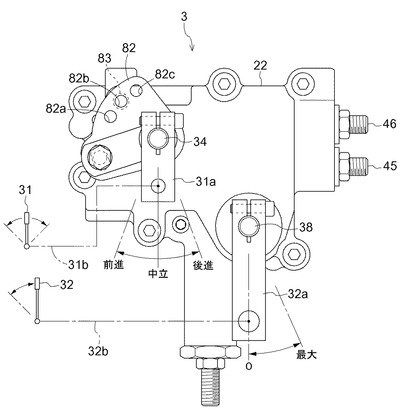
シャトルアーム33は、シャトルレバー軸34を介して回動可能に軸支される。シャトルレバー軸34には、シャトルリンク31a及びシャトルロッド31bを介してシャトルレバー31が連結される。こうして、操作者がシャトルレバー31を傾動させることにより、シャトルアーム33がシャトルレバー軸34を支点にして回動する。つまり、シャトルアーム33がシャトルレバー軸34を支点にして中立位置から図5において紙面時計回りに回動すると前進位置となるとともに、図5において紙面反時計回りに回動すると後進位置となる。また、シャトルアーム33の長手方向一端側には、係合ピン35が設けられる。係合ピン35には、連結フォーク29の係合溝42が摺動可能に係合される。
【0031】
また、シャトルレバー軸34には、略扇形状に形成されたプレート82が設けられる。プレート82には、前進係合孔82a、中立係合孔82b及び後進係合孔82cが形成される。前進係合孔82a、中立係合孔82b及び後進係合孔82cは、シャトルレバー軸34を中心とする同一円弧上に形成される。前進係合孔82a、中立係合孔82b及び後進係合孔82cは、いずれも係合ボール83と係合可能とされる。係合ボール83は、スプリング84によって前進係合孔82a、中立係合孔82b及び後進係合孔82cのいずれかと係合するように付勢される。シャトルアーム33は、前進係合孔82a、中立係合孔82b及び後進係合孔82cと係合ボール83とが係合することにより、それぞれ前進位置、中立位置及び後進位置となる。
【0032】
変速アーム37は、変速レバー軸38を介して回動可能に軸支される。変速レバー軸38には、変速リンク32a及び変速ロッド32bを介して変速レバー32が連結される。こうして、操作者が変速レバー32を傾動させることにより、変速アーム37が変速レバー軸38を支点にして回動する。つまり、変速アーム37が変速レバー軸38を支点にして車速0位置から車速最大位置の範囲内で図5において紙面反時計回りに回動するのにしたがって走行速度が増加する。また、変速アーム37には、係合ピン39が設けられる。係合ピン39には、連結ブロック30の係合溝76が摺動可能に係合される。
【0033】
なお、本発明に係る方向操作具は、本実施形態に係るシャトルレバー31に限定されるものではない。例えば、本発明に係る方向操作具は、ペダルであってもよい。また、本発明に係る変速操作具は、本実施形態に係る変速レバー32に限定されるものではない。例えば、本発明に係る変速操作具は、ペダルであってもよい。
【0034】
フィードバックレバー21は、その長手方向一端側に連結ロッド20を介してサーボピストン9が連結されるとともに、その長手方向中間部に連結ピン40を介してサーボスプール23が連結される。また、フィードバックレバー21の長手方向他端側には、係合ピン41が設けられる。係合ピン41には、連結フォーク29の係合溝43が摺動可能に係合される。
【0035】
連結フォーク29は、係合溝42と、係合溝43と、支持軸44と、を備える。係合溝42は、連結フォーク29の長手方向一端側に形成される。係合溝42には、シャトルアーム33の係合ピン35が摺動可能に係合される。また、係合溝43は、連結フォーク29の長手方向他端側に形成される。係合溝43には、フィードバックレバー21の係合ピン41が摺動可能に係合される。また、支持軸44には、連結ブロック30及びスプリング受け86が回動可能に軸支される。スプリング受け86には、スプリング87の一端部が係止される。スプリング87の他端部は、バルブケース22の内壁に係止される(図3参照)。連結フォーク29は、スプリング87によって図5において紙面右側に付勢される。
【0036】
連結ブロック30は、変速アーム37を連結フォーク29に連結する。連結ブロック30は、その長手方向一端側に連結フォーク29の支持軸44が回動可能に軸支される。連結ブロック30の長手方向他端側には、係合溝76が形成される。係合溝76には、変速アーム37の係合ピン39が摺動可能に係合される。また、連結ブロック30は、取付軸45の取付ロッド部47に摺動可能に取り付けられる。
【0037】
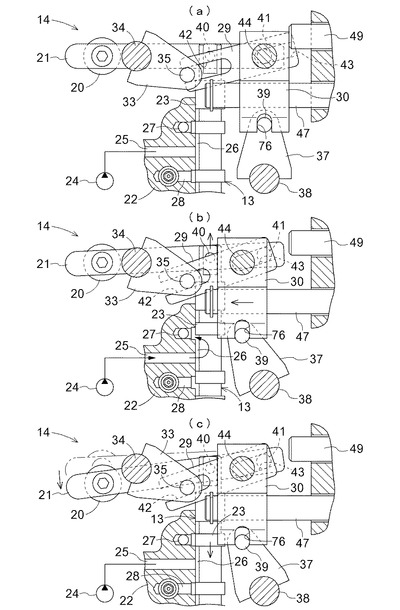
次に、フィードバック機構14の動作態様について、図9から図11により説明する。
【0038】
図9(a)に示すように、シャトルアーム33が前進位置となる場合において、変速アーム37が車速0位置となるときは、フィードバックレバー21は、中立位置となる。このことは、シャトルアーム33がシャトルレバー軸34を支点にして前進位置側に回動すると、シャトルアーム33の係合ピン35及び連結フォーク29の係合溝42を介して、連結フォーク29が支持軸44を支点にして図9において紙面反時計回りに回動するが、フィードバックレバー21の係合ピン41は、中立位置から移動しないからである。
【0039】
この状態から、図9(b)に示すように、変速アーム37が変速レバー軸38を支点にして車速最大位置側に回動するのにしたがって、変速アーム37の係合ピン39及び連結ブロック30の係合溝76を介して、連結ブロック30が取付軸45の取付ロッド部47に沿って図9において紙面左側に摺動する。すると、フィードバックレバー21の係合ピン41及び連結フォーク29の係合溝43を介して、フィードバックレバー21が連結ロッド20を支点にして図9において紙面反時計回りに回動する。
【0040】
すると、フィードバックレバー21とサーボスプール23とが連結ピン40を介して連結されているため、フィードバックレバー21が連結ロッド20を支点にして図9において紙面反時計回りに回動するのにしたがって、サーボスプール23が図9において紙面上側に移動する。これにより、メイン油路25と前進側ポート27とがサーボ油路26を介して連通されて、作動油が前進側ポート27に流れるため、サーボピストン9が前進側に移動する。すると、サーボピストン9とサーボスプール23とがフィードバックレバー21を介して連結されているため、サーボピストン9が前進側に移動するのにしたがって、サーボスプール23が図9において紙面下側に移動する。
【0041】
そして、最終的には、図9(c)に示すように、サーボピストン9が前進側に移動し終えると、サーボスプール23が中立位置に復帰する。これにより、メイン油路25と前進側ポート27との連通が遮断されて、作動油が前進側ポート27に流れなくなる。つまり、フィードバック機構14によって、サーボシリンダ8の動作がサーボバルブ13に機械的に伝達されて、シャトルレバー31で設定された前進走行方向で且つ変速レバー32の操作位置に対応する位置にサーボシリンダ8が達すると、サーボバルブ13が中立位置に機械的に制御されてサーボシリンダ8が停止される。
【0042】
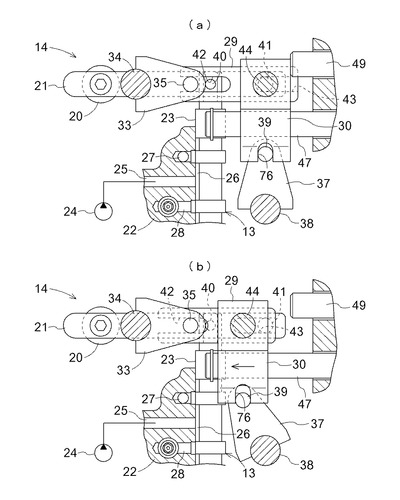
また、図10(a)に示すように、シャトルアーム33が中立位置となる場合において、変速アーム37が車速0位置となるときは、フィードバックレバー21は、中立位置から移動しない。同様に、図10(b)に示すように、シャトルアーム33が中立位置となる場合において、変速アーム37が車速最大位置となるときも、フィードバックレバー21は、中立位置から移動しない。このことは、変速アーム37が変速レバー軸38を支点にして車速最大位置側に回動するのにしたがって、変速アーム37の係合ピン39及び連結ブロック30の係合溝76を介して、連結ブロック30が取付軸45の取付ロッド部47に沿って図10において紙面左側に摺動するが、フィードバックレバー21の係合ピン41は、中立位置から移動しないからである。
【0043】
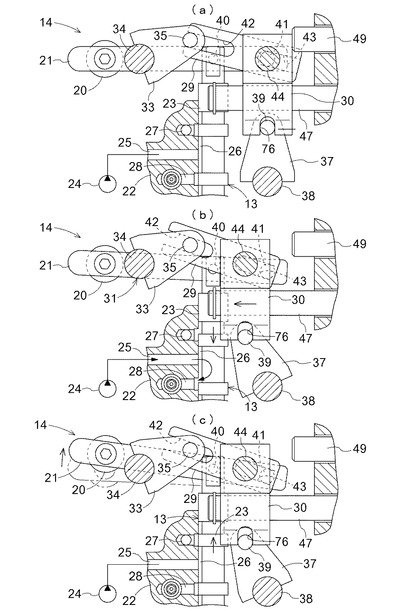
また、図11(a)に示すように、シャトルアーム33が後進位置となる場合において、変速アーム37が車速0位置となるときは、フィードバックレバー21は、中立位置から移動しない。このことは、シャトルアーム33がシャトルレバー軸34を支点にして後進位置側に回動すると、シャトルアーム33の係合ピン35及び連結フォーク29の係合溝42を介して、連結フォーク29が支持軸44を支点にして図11において紙面時計回りに回動するが、フィードバックレバー21の係合ピン41は、中立位置から移動しないからである。
【0044】
この状態から、図11(b)に示すように、変速アーム37が変速レバー軸38を支点にして車速最大位置側に回動するのにしたがって、変速アーム37の係合ピン39及び連結ブロック30の係合溝76を介して、連結ブロック30が取付軸45の取付ロッド部47に沿って図11において紙面左側に摺動する。すると、フィードバックレバー21の係合ピン41及び連結フォーク29の係合溝43を介して、フィードバックレバー21が連結ロッド20を支点にして図11において紙面時計回りに回動する。
【0045】
すると、フィードバックレバー21とサーボスプール23とが連結ピン40を介して連結されているため、フィードバックレバー21が連結ロッド20を支点にして図11において紙面時計回りに回動するのにしたがって、サーボスプール23が図11において紙面下側に移動する。これにより、メイン油路25と後進側ポート28とがサーボ油路26を介して連通されて、作動油が後進側ポート28に流れるため、サーボピストン9が後進側に移動する。すると、サーボピストン9とサーボスプール23とがフィードバックレバー21を介して連結されているため、サーボピストン9が後進側に移動するのにしたがって、サーボスプール23が図11において紙面上側に移動する。
【0046】
そして、最終的には、図11(c)に示すように、サーボピストン9が後進側に移動し終えると、サーボスプール23が中立位置に復帰する。これにより、メイン油路25と後進側ポート28との連通が遮断されて、作動油が後進側ポート28に流れなくなる。つまり、フィードバック機構14によって、サーボシリンダ8の動作がサーボバルブ13に機械的に伝達されて、シャトルレバー31で設定された後進走行方向で且つ変速レバー32の操作位置に対応する位置にサーボシリンダ8が達すると、サーボバルブ13が中立位置に機械的に制御されてサーボシリンダ8が停止される。
【0047】
次に、位置決め機構15について、図5及び図12により説明する。
【0048】
図5に示すように、位置決め機構15は、取付軸45と、規制軸46と、を備える。
【0049】
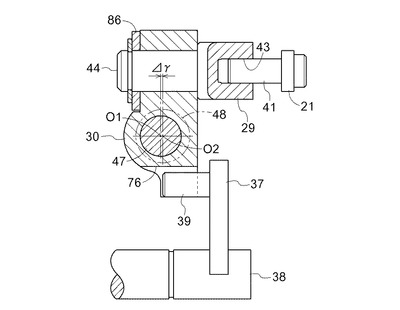
取付軸45は、取付ロッド部47と、取付ネジ部48と、を備える。取付軸45は、取付ネジ部48を介してバルブケース22に螺挿される。取付ロッド部47には、連結ブロック30が摺動可能に取り付けられる。図12に示すように、取付軸45は、取付ロッド部47と取付ネジ部48とが偏心して配置される。取付ロッド部47と取付ネジ部48との偏心量は、取付ロッド部47の軸心をO1とし、取付ネジ部48の軸心をO2とすると、Δrで表わされる。
【0050】
規制軸46は、規制ロッド部49と、規制ネジ部50と、を備える。規制軸46は、規制ネジ部50を介してバルブケース22に螺挿される。規制ロッド部49は、バルブケース22から所定の長さ(図5に示す出代L)突出する。出代Lは、規制軸46の螺挿量を変更することにより変更される。規制ロッド部49の突出先端部は、連結ブロック30の端面に当接する。
【0051】
次に、位置決め機構15によるフィードバックレバー21の位置決めの仕方について、図5により説明する。なお、ここでは、図5において紙面左右方向をY方向、図5において紙面上下方向をX方向として説明する。
【0052】
図5に示すように、先ず、フィードバックレバー21のX方向の位置を位置決めするには、取付軸45を回動させる。これにより、取付軸45の螺挿量が変更されて、取付ロッド部47がX方向に偏心量Δr分だけ移動する。つまり、取付ロッド部47の軸心O1は、取付ネジ部48の軸心O2を中心とする半径Δrの円の円周上を移動する。こうして、取付ロッド部47がX方向に偏心量Δr分だけ移動することにより、連結ブロック30を介してフィードバックレバー21が移動して、フィードバックレバー21のX方向の位置が位置決めされる。
【0053】
次に、フィードバックレバー21のY方向の位置を位置決めするには、規制軸46を回動させる。これにより、規制軸46の螺挿量が変更されて、規制ロッド部49の出代Lが変更される。こうして、規制ロッド部49の突出先端部と連結ブロック30の端面とが当接する位置が変更されて、フィードバックレバー21のY方向の位置、つまり、変速アーム37の中立位置(車速0位置)が位置決めされる。
【0054】
こうして、フィードバックレバー21のX方向及びY方向の位置を位置決めすることにより、変速レバー32(変速アーム37)及びシャトルレバー31(シャトルアーム33)が中立位置となるときに、サーボスプール23が中立位置となるように調節する。なお、前述のように、連結フォーク29は、スプリング87によって図5において紙面右側に付勢されるところ、連結フォーク29の支持軸44には、連結ブロック30が回動可能に軸支されるため、連結ブロック30も連結フォーク29と同様に付勢される。つまり、連結ブロック30がスプリング87によって図5において紙面右側に付勢されることにより、連結ブロック30の端面が規制ロッド部49の突出先端部に確実に当接するようにしている。
【0055】
以上のように、本発明の第一実施形態に係る作業車は、前進側及び後進側に変速自在な走行用の静油圧式無段変速装置Mと、人為的に操作されるもので前進又は後進の走行方向を設定するシャトルレバー31と、人為的に操作されるもので走行速度を設定する変速レバー32と、シャトルレバー31及び変速レバー32の操作位置に基づいて静油圧式無段変速装置Mを制御するサーボコントロール装置3と、を備え、サーボコントロール装置3は、静油圧式無段変速装置Mを制御するサーボシリンダ8と、サーボシリンダ8に作動油を給排してサーボシリンダ8を作動させるサーボバルブ13と、シャトルレバー31の操作位置をサーボバルブ13に機械的に伝達してサーボバルブ13を制御するシャトルアーム33と、変速レバー32の操作位置をサーボバルブ13に機械的に伝達してサーボバルブ13を制御する変速アーム37と、サーボシリンダ8の動作をサーボバルブ13に機械的に伝達して、シャトルレバー31で設定された走行方向で且つ変速レバー32の操作位置に対応する位置にサーボシリンダ8が達すると、サーボバルブ13を中立位置に機械的に制御してサーボシリンダ8を停止させるフィードバック機構14と、を備える。
【0056】
このような構成により、サーボコントロール装置3がフィードバック機構14を備えるいわゆる機械式とされることにより、土や泥等の付着に起因する電気的な故障の発生を防いで、サーボコントロール装置3の性能に対する信頼性を向上させることができる。また、走行方向と走行速度とをそれぞれ別々のシャトルレバー31と変速レバー32とで設定可能となるため、静油圧式無段変速装置Mを容易に操作することができる。例えば、走行速度を一定に維持しつつ走行方向を切り替えたい場合は、変速レバー32を操作せずにシャトルレバー31だけを操作して、容易に操作することができる。
【0057】
また、フィードバック機構14は、その長手方向一端側にサーボシリンダ8が連結されるとともに、その長手方向中間部にサーボバルブ13が連結されるフィードバックレバー21と、フィードバックレバー21の長手方向他端側が連結されるとともに、シャトルアーム33及び変速アーム37が連結される連結フォーク29と、を備える。
【0058】
このような構成により、サーボシリンダ8、シャトルレバー31及び変速レバー32の動作がフィードバックレバー21に集約されてサーボバルブ13に伝達されるため、フィードバック機構14に係る構造を簡素化することができる。
【0059】
また、サーボコントロール装置3は、フィードバックレバー21の中立位置とサーボバルブ13の中立位置とを調節可能に位置決めする位置決め機構15を備える。
【0060】
このような構成により、フィードバック機構14を構成する部材の部品精度を位置決めのためだけに上げる必要がないため、製造コストを低減することができる。また、長期間の使用による中立位置のズレを修正することができる。
【0061】
また、サーボコントロール装置3は、サーボバルブ13を収容するバルブケース22を備え、フィードバック機構14は、バルブケース22に支持される。
【0062】
このような構成により、フィードバック機構14とバルブケース22とがユニット化されるため、静油圧式無段変速装置Mを容易に組み立てることができる。
【0063】
次に、本発明の第二実施形態に係る無段変速装置について、図13により説明する。なお、第一実施形態と同一符号の部材については、第一実施形態と同一構造であるため詳細な説明を省略する。
【0064】
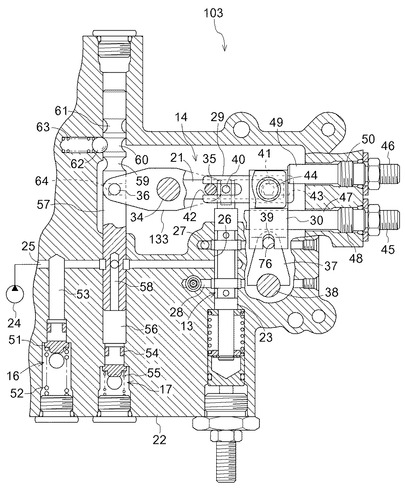
図13に示すように、第二実施形態においては、サーボコントロール装置103は、高圧リリーフバルブ16と、低圧リリーフバルブ17と、を備える。また、シャトルアーム133の長手方向他端側には、係合ピン36が設けられる。
【0065】
高圧リリーフバルブ16は、作動油の圧力が所定の設定圧力(高リリーフ圧力)に達すると作動油をリリーフする。高圧リリーフバルブ16は、高圧リリーフ弁体51と、高圧リリーフスプリング52と、を備える。バルブケース22には、メイン油路25に接続される高圧リリーフ油路53が形成される。高圧リリーフ油路53には、高圧リリーフ弁体51が摺動可能に内挿される。高圧リリーフ弁体51は、高圧リリーフスプリング52によって閉弁するように付勢される。
【0066】
低圧リリーフバルブ17は、作動油の圧力が所定の設定圧力(低リリーフ圧力)に達すると作動油をリリーフする。なお、低圧リリーフバルブ17の設定圧力(低リリーフ圧力)は、高圧リリーフバルブ16の設定圧力(高リリーフ圧力)よりも低い。低圧リリーフバルブ17は、低圧リリーフ弁体54と、低圧リリーフスプリング55と、を備える。バルブケース22には、メイン油路25に接続される低圧リリーフ油路56が形成される。低圧リリーフ油路56には、低圧リリーフ弁体54が摺動可能に内挿される。低圧リリーフ弁体54は、低圧リリーフスプリング55によって閉弁するように付勢される。低圧リリーフスプリング55は、高圧リリーフスプリング52よりも低いばね定数を有する。また、低圧リリーフ油路56には、シャトルスプール57が摺動可能に内挿される。
【0067】
シャトルスプール57は、その長手方向一端側の軸心部にスプール油路58が形成される。スプール油路58は、メイン油路25と低圧リリーフ油路56とを連通可能に接続する。また、シャトルスプール57の長手方向他端側の外周には、前進係合溝59、中立係合溝60及び後進係合溝61が形成される。
【0068】
前進係合溝59、中立係合溝60及び後進係合溝61は、いずれも係合ボール62と係合可能とされる。係合ボール62は、スプリング63によって前進係合溝59、中立係合溝60及び後進係合溝61のいずれかと係合するように付勢される。シャトルスプール57は、低圧リリーフ油路56内を摺動して前進係合溝59、中立係合溝60及び後進係合溝61と係合ボール62とが係合することにより、それぞれ前進位置、中立位置及び後進位置となる。また、シャトルスプール57の長手方向中間部の外周には、係合溝64が形成される。係合溝64には、シャトルアーム133の係合ピン36が摺動可能に係合される。
【0069】
次に、高圧リリーフバルブ16及び低圧リリーフバルブ17の動作態様について、図13により説明する。
【0070】
図13に示すように、先ず、シャトルスプール57が中立位置となる(シャトルスプール57の中立係合溝60と係合ボール62とが係合する)場合は、シャトルスプール57のスプール油路58を介してメイン油路25と低圧リリーフ油路56とが連通されるため、低圧リリーフバルブ17によって作動油がリリーフされることになる。つまり、シャトルスプール57が中立位置となる場合、メイン油路25は、高圧リリーフ油路53と連通されているが、スプール油路58を介して低圧リリーフ油路56とも連通されているため、作動油の圧力が高圧リリーフバルブ16の設定圧力(高リリーフ圧力)に達する前に低圧リリーフバルブ17の設定圧力(低リリーフ圧力)に達すると、低圧リリーフバルブ17によって作動油がリリーフされることになる。
【0071】
次に、シャトルスプール57が前進位置となる(シャトルスプール57の前進係合溝59と係合ボール62とが係合する)場合は、メイン油路25と低圧リリーフ油路56との連通が遮断されるため、高圧リリーフバルブ16によって作動油がリリーフされることになる。つまり、シャトルアーム133がシャトルレバー軸34を支点にして前進位置側に回動すると、シャトルアーム133の係合ピン36及びシャトルスプール57の係合溝64を介して、シャトルスプール57が図13において紙面上側に摺動する。すると、メイン油路25と低圧リリーフ油路56との連通が遮断されるため、作動油の圧力が高圧リリーフバルブ16の設定圧力(高リリーフ圧力)に達すると、高圧リリーフバルブ16によって作動油がリリーフされることになる。
【0072】
次に、シャトルスプール57が後進位置となる(シャトルスプール57の後進係合溝61と係合ボール62とが係合する)場合も、メイン油路25と低圧リリーフ油路56との連通が遮断されるため、高圧リリーフバルブ16によって作動油がリリーフされることになる。つまり、シャトルアーム133がシャトルレバー軸34を支点にして後進位置側に回動すると、シャトルアーム133の係合ピン36及びシャトルスプール57の係合溝64を介して、シャトルスプール57が図13において紙面下側に摺動する。すると、メイン油路25と低圧リリーフ油路56との連通が遮断されるため、作動油の圧力が高圧リリーフバルブ16の設定圧力(高リリーフ圧力)に達すると、高圧リリーフバルブ16によって作動油がリリーフされることになる。
【0073】
以上のように、本発明の第二実施形態に係るサーボコントロール装置103は、サーボバルブ13が前進位置又は後進位置に切り替えられる場合に作動油をリリーフする高圧リリーフバルブ16と、サーボバルブ13が中立位置に切り替えられる場合に高圧リリーフバルブ16よりも低い設定圧力で作動油をリリーフする低圧リリーフバルブ17と、を備える。
【0074】
このような構成により、サーボバルブ13が中立位置に切り替えられる場合には、低圧リリーフバルブ17によって低い設定圧力で作動油がリリーフされる。このため、例えば、走行速度が高い状態でサーボバルブ13が前進位置又は後進位置から中立位置を経て前進位置又は後進位置に切り替えられるとき(つまり、高速で走行中にトラクタが急停止して急発進するとき)には、作動油の圧力が低い状態を経ることになる。よって、高圧の作動油によるサーボシリンダ8の急激な作動を防止して、サーボバルブ13の切替時に生じる衝撃を低減することができる。
【0075】
次に、本発明の第三実施形態に係る無段変速装置について、図14により説明する。なお、第一実施形態と同一符号の部材については、第一実施形態と同一構造であるため詳細な説明を省略する。
【0076】
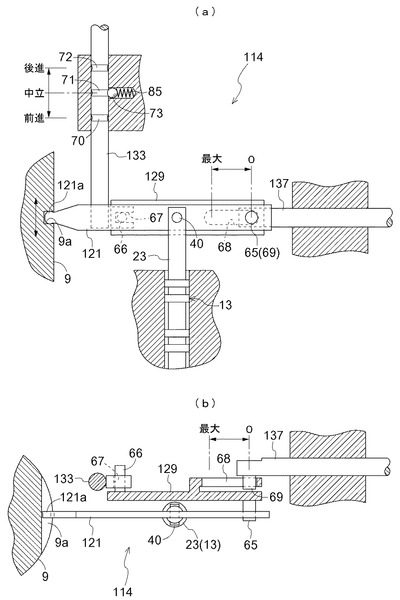
図14に示すように、第三実施形態においては、フィードバック機構114は、フィードバック部材としてのフィードバックレバー121と、連結部材としての連結レバー129と、を備える。
【0077】
フィードバックレバー121は、その長手方向一端側にサーボピストン9が連結されるとともに、その長手方向中間部に連結ピン40を介してサーボスプール23が連結される。フィードバックレバー121の長手方向一端部には、サーボピストン9に形成される係合溝9aと係合する係合部121aが形成される。フィードバックレバー121の長手方向他端側には、連結ピン65を介して連結レバー129の長手方向他端側が回動可能に連結される。
【0078】
連結レバー129は、係合ピン66と、係合溝68と、を備える。係合ピン66は、連結レバー129の長手方向一端側に設けられる。係合ピン66には、シャトルアーム133の係合溝67が係合される。また、係合溝68は、連結レバー129の長手方向他端側に形成される。係合溝68には、変速アーム137の係合ピン69が摺動可能に係合される。また、連結レバー129は、その長手方向他端側が連結ピン65を介してフィードバックレバー121の長手方向他端側に回動可能に連結される。
【0079】
シャトルアーム133は、その長手方向に移動可能とされる。シャトルアーム133の長手方向一端側には、係合溝67が形成される。係合溝67には、連結レバー129の係合ピン66が係合される。また、シャトルアーム133の外周には、前進係合溝70、中立係合溝71及び後進係合溝72が形成される。前進係合溝70、中立係合溝71及び後進係合溝72は、いずれも係合ボール73と係合可能とされる。係合ボール73は、スプリング85によって前進係合溝70、中立係合溝71及び後進係合溝72のいずれかと係合するように付勢される。シャトルアーム133は、その長手方向に移動して前進係合溝70、中立係合溝71及び後進係合溝72と係合ボール73とが係合することにより、それぞれ前進位置、中立位置及び後進位置となる。
【0080】
変速アーム137は、その長手方向に移動可能とされる。つまり、変速アーム137は、図14において紙面左側に移動するのにしたがって走行速度が増加する。また、変速アーム137の長手方向一端側には、係合ピン69が設けられる。係合ピン69には、連結レバー129の係合溝68が摺動可能に係合される。
【0081】
これにより、シャトルアーム133が前進位置となる(シャトルアーム133の前進係合溝70と係合ボール73とが係合する)と、連結レバー129が連結ピン65を支点にして図14(a)において紙面時計回りに回動する。このとき、変速アーム137が図14において紙面左側(走行速度増加側)に移動すると、連結レバー129は、係合ピン66を支点にして図14(a)において紙面時計回りに回動する。すると、フィードバックレバー121は、その長手方向一端側(サーボピストン9側)を支点にして図14(a)において紙面時計回りに回動する。
【0082】
すると、フィードバックレバー121とサーボスプール23とが連結ピン40を介して連結されているため、フィードバックレバー121がその長手方向一端側(サーボピストン9側)を支点にして図14(a)において紙面時計回りに回動するのにしたがって、サーボスプール23が図14(a)において紙面下側に移動する。これにより、作動油が図示しない前進側ポートに流れるため、サーボピストン9が前進側に移動する。すると、サーボピストン9とサーボスプール23とがフィードバックレバー121を介して連結されているため、サーボピストン9が前進側に移動するのにしたがって、サーボスプール23が図14(a)において紙面上側に移動する。
【0083】
そして、最終的には、サーボピストン9が前進側に移動し終えると、サーボスプール23が中立位置に復帰する。これにより、作動油が前記前進側ポートに流れなくなる。
【0084】
また、シャトルアーム133が後進位置となる(シャトルアーム133の後進係合溝72と係合ボール73とが係合する)と、連結レバー129が連結ピン65を支点にして図14(a)において紙面反時計回りに回動する。このとき、変速アーム137が図14において紙面左側(走行速度増加側)に移動すると、連結レバー129は、係合ピン66を支点にして図14(a)において紙面反時計回りに回動する。すると、フィードバックレバー121は、その長手方向一端側(サーボピストン9側)を支点にして図14(a)において紙面反時計回りに回動する。
【0085】
すると、フィードバックレバー121とサーボスプール23とが連結ピン40を介して連結されているため、フィードバックレバー121がその長手方向一端側(サーボピストン9側)を支点にして図14(a)において紙面反時計回りに回動するのにしたがって、サーボスプール23が図14(a)において紙面上側に移動する。これにより、作動油が図示しない後進側ポートに流れるため、サーボピストン9が後進側に移動する。すると、サーボピストン9とサーボスプール23とがフィードバックレバー121を介して連結されているため、サーボピストン9が後進側に移動するのにしたがって、サーボスプール23が図14において紙面下側に移動する。
【0086】
そして、最終的には、サーボピストン9が後進側に移動し終えると、サーボスプール23が中立位置に復帰する。これにより、作動油が前記後進側ポートに流れなくなる。
【0087】
なお、詳細な説明は省略するが、シャトルアーム133が中立位置となる(シャトルアーム133の中立係合溝71と係合ボール73とが係合する)ときに、変速アーム137が図14において紙面左側(走行速度増加側)に移動しても、変速アーム137の係合ピン69が連結レバー129の係合溝68内を摺動するだけで、フィードバックレバー121は、中立位置から移動しない。
【0088】
次に、本発明の第四実施形態に係る無段変速装置について、図15により説明する。なお、第一及び第三実施形態と同一符号の部材については、第一及び第三実施形態と同一構造であるため詳細な説明を省略する。
【0089】
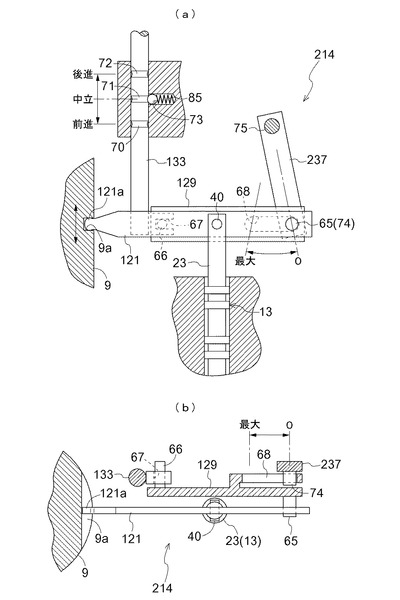
図15に示すように、第四実施形態においては、フィードバック機構214は、変速アーム237の係合ピン74が連結レバー129の係合溝68に摺動可能に係合される。
【0090】
変速アーム237は、変速アーム軸75を介して回動可能に軸支される。つまり、変速アーム237は、変速アーム軸75を支点にして図15(a)において紙面時計回りに回動するのにしたがって走行速度が増加する。また、変速アーム237には、係合ピン74が設けられる。係合ピン74には、連結レバー129の係合溝68が摺動可能に係合される。
【0091】
これにより、シャトルアーム133が前進位置となる(シャトルアーム133の前進係合溝70と係合ボール73とが係合する)ときに、変速アーム237が変速アーム軸75を支点にして図15(a)において紙面時計回り(走行速度増加側)に回動すると、連結レバー129は、係合ピン66を支点にして図15(a)において紙面時計回りに回動する。すると、フィードバックレバー121は、その長手方向一端側(サーボピストン9側)を支点にして図15(a)において紙面時計回りに回動する。なお、その後は図15の場合と同様に、サーボスプール23が移動して作動油が図示しない前進側ポートに流れてサーボピストン9が前進側に移動するとともに、その後サーボスプール23が中立位置に復帰する。
【0092】
また、シャトルアーム133が後進位置となる(シャトルアーム133の後進係合溝72と係合ボール73とが係合する)ときに、変速アーム237が変速アーム軸75を支点にして図15(a)において紙面時計回り(走行速度増加側)に回動すると、連結レバー129は、係合ピン66を支点にして図15(a)において紙面反時計回りに回動する。すると、フィードバックレバー121は、その長手方向一端側(サーボピストン9側)を支点にして図15(a)において紙面反時計回りに回動する。なお、その後は図15の場合と同様に、サーボスプール23が移動して作動油が図示しない後進側ポートに流れてサーボピストン9が後進側に移動するとともに、その後サーボスプール23が中立位置に復帰する。
【0093】
なお、詳細な説明は省略するが、シャトルアーム133が中立位置となる(シャトルアーム133の中立係合溝71と係合ボール73とが係合する)ときに、変速アーム237が変速アーム軸75を支点にして図15(a)において紙面時計回り(走行速度増加側)に回動しても、変速アーム237の係合ピン74が連結レバー129の係合溝68内を摺動するだけで、フィードバックレバー121は、中立位置から移動しない。
【0094】
なお、本発明の各実施形態においては、無段変速装置として静油圧式無段変速装置Mを想定しているが、無段変速装置は、静油圧式無段変速装置と遊星歯車とを組み合わせて構成される油圧機械式無段変速装置であってもよい。
【産業上の利用可能性】
【0095】
本発明は、無段変速装置(例えば、静油圧式無段変速装置、油圧機械式無段変速装置)を備える作業車に利用可能である。
【符号の説明】
【0096】
1 油圧ポンプ
3 サーボコントロール装置
6 ポンプ斜板(斜板)
8 サーボシリンダ(油圧アクチュエータ)
13 サーボバルブ
14 フィードバック機構
15 位置決め機構
16 高圧リリーフバルブ
17 低圧リリーフバルブ
21 フィードバックレバー(フィードバック部材)
22 バルブケース
29 連結フォーク(連結部材)
31 シャトルレバー(方向操作具)
32 変速レバー(変速操作具)
33 シャトルアーム(方向連係機構)
37 変速アーム(変速連係機構)
103 サーボコントロール装置
114 フィードバック機構
121 フィードバックレバー(フィードバック部材)
129 連結レバー(連結部材)
133 シャトルアーム(方向連係機構)
214 フィードバック機構
M 静油圧式無段変速装置(無段変速装置)
【技術分野】
【0001】
本発明は、作業車に関し、より詳細には、作業車における無段変速装置の操作構造に関する。
【背景技術】
【0002】
従来より、無段変速装置を備える作業車が公知となっている(例えば、特許文献1参照)。特許文献1に記載の静油圧式無段変速装置には、いわゆる電子式のサーボコントロール機構が備えられるとともに、走行方向及び走行速度を設定する変速操作具としての変速ペダルが備えられる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−92954号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術では、作業車が使用される過酷な環境(例えば、土や泥等が付着しやすい環境等)の影響により、サーボコントロール機構の性能に対する信頼性が低下する可能性がある。つまり、電子式のサーボコントロール機構に土や泥等が付着することにより、電気的な故障が発生する可能性がある。
【0005】
また、特許文献1に記載の技術では、走行方向及び走行速度の両方を単一の変速操作具としての変速ペダルで設定する構成であるため、例えば、走行速度を一定に維持しつつ走行方向を切り替えたい場合は、変速ペダルの踏み込み量は同じのままで踏み込み方向を切り替える操作をする必要がある。しかし、このような変速ペダルの操作は容易ではなく、変速ペダルの踏み込み方向を切り替えた時に踏み込み量が変わってしまい、走行速度を一定に維持することができないことがある。
【0006】
本発明は以上の如き状況に鑑みてなされたものであり、サーボコントロール装置の性能に対する信頼性を向上させることができるとともに、無段変速装置を容易に操作することができる作業車を提供することを目的とする。
【課題を解決するための手段】
【0007】
(構成)
本発明の第1特徴は、作業車において次のように構成することにある。前進側及び後進側に変速自在な走行用の無段変速装置と、人為的に操作されるもので前進又は後進の走行方向を設定する方向操作具と、人為的に操作されるもので走行速度を設定する変速操作具と、前記方向操作具及び前記変速操作具の操作位置に基づいて前記無段変速装置を制御するサーボコントロール装置と、を備え、前記サーボコントロール装置は、前記無段変速装置を制御する油圧アクチュエータと、前記油圧アクチュエータに作動油を給排して前記油圧アクチュエータを作動させるサーボバルブと、前記方向操作具の操作位置を前記サーボバルブに機械的に伝達して前記サーボバルブを制御する方向連係機構と、前記変速操作具の操作位置を前記サーボバルブに機械的に伝達して前記サーボバルブを制御する変速連係機構と、前記油圧アクチュエータの動作を前記サーボバルブに機械的に伝達して、前記方向操作具で設定された走行方向で且つ前記変速操作具の操作位置に対応する位置に前記油圧アクチュエータが達すると、前記サーボバルブを中立位置に機械的に制御して前記油圧アクチュエータを停止させるフィードバック機構と、を備える。
【0008】
(作用及び発明の効果)
本発明の第1特徴によると、サーボコントロール装置がフィードバック機構を備えるいわゆる機械式とされることにより、土や泥等の付着に起因する電気的な故障の発生を防いで、サーボコントロール装置の性能に対する信頼性を向上させることができる。また、走行方向と走行速度とをそれぞれ別々の方向操作具と変速操作具とで設定可能となるため、無段変速装置を容易に操作することができる。例えば、走行速度を一定に維持しつつ走行方向を切り替えたい場合は、変速操作具を操作せずに方向操作具だけを操作して、容易に操作することができる。
【0009】
(構成)
本発明の第2特徴は、本発明の第1特徴の作業車において次のように構成することにある。前記フィードバック機構は、その長手方向一端側に前記油圧アクチュエータが連結されるとともに、その長手方向中間部に前記サーボバルブが連結されるフィードバック部材と、前記フィードバック部材の長手方向他端側が連結されるとともに、前記方向連係機構及び前記変速連係機構が連結される連結部材と、を備える。
【0010】
(作用及び発明の効果)
本発明の第2特徴によると、油圧シリンダ、方向操作具及び変速操作具の動作がフィードバック部材に集約されてサーボバルブに伝達されるため、フィードバック機構に係る構造を簡素化することができる。
【0011】
(構成)
本発明の第3特徴は、本発明の第2特徴の作業車において次のように構成することにある。前記サーボコントロール装置は、前記フィードバック部材の中立位置と前記サーボバルブの中立位置とを調節可能に位置決めする位置決め機構を備える。
【0012】
(作用及び発明の効果)
本発明の第3特徴によると、フィードバック機構を構成する部材の部品精度を位置決めのためだけに上げる必要がないため、製造コストを低減することができる。また、長期間の使用による中立位置のズレを修正することができる。
【0013】
(構成)
本発明の第4特徴は、本発明の第1から第3特徴の作業車のうちのいずれか一つにおいて次のように構成することにある。前記サーボコントロール装置は、前記サーボバルブが前進位置又は後進位置に切り替えられる場合に作動油をリリーフする高圧リリーフバルブと、前記サーボバルブが中立位置に切り替えられる場合に前記高圧リリーフバルブよりも低い設定圧力で作動油をリリーフする低圧リリーフバルブと、を備える。
【0014】
(作用及び発明の効果)
本発明の第4特徴によると、サーボバルブが中立位置に切り替えられる場合には、低圧リリーフバルブによって低い設定圧力で作動油がリリーフされる。このため、例えば、走行速度が高い状態でサーボバルブが前進位置又は後進位置から中立位置を経て前進位置又は後進位置に切り替えられるときには、作動油の圧力が低い状態を経ることになる。よって、高圧の作動油による油圧アクチュエータの急激な作動を防止して、サーボバルブの切替時に生じる衝撃を低減することができる。
【0015】
(構成)
本発明の第5特徴は、本発明の第1から第4特徴の作業車のうちのいずれか一つにおいて次のように構成することにある。前記サーボコントロール装置は、前記サーボバルブを収容するバルブケースを備え、前記フィードバック機構は、前記バルブケースに支持される。
【0016】
(作用及び発明の効果)
本発明の第5特徴によると、フィードバック機構とバルブケースとがユニット化されるため、無段変速装置を容易に組み立てることができる。
【図面の簡単な説明】
【0017】
【図1】本発明の第一実施形態に係るトラクタを示す側面図。
【図2】静油圧式無段変速装置を示す側面断面図。
【図3】静油圧式無段変速装置を示す平面断面図。
【図4】サーボコントロール装置を示す正面断面図。
【図5】サーボコントロール装置を示す側面断面図。
【図6】サーボコントロール装置を示す側面図。
【図7】フィードバック機構を示す分解斜視図。
【図8】静油圧式無段変速装置の油圧回路を示す図。
【図9】(a)シャトルアームが前進位置である場合において変速アームが車速0位置であるときのサーボコントロール装置の動作態様を示す図。(b)同様の場合において変速アームが車速最大位置であるときであってサーボバルブが前進位置に切り替えられた状態のサーボコントロール装置の動作態様を示す図。(c)同様の場合において変速アームが車速最大位置であるときであってサーボバルブが中立位置に復帰した状態のサーボコントロール装置の動作態様を示す図。
【図10】(a)シャトルアームが中立位置である場合において変速アームが車速0位置であるときのサーボコントロール装置の動作態様を示す図。(b)同様の場合において変速アームが車速最大位置であるときのサーボコントロール装置の動作態様を示す図。
【図11】(a)シャトルアームが後進位置である場合において変速アームが車速0位置であるときのサーボコントロール装置の動作態様を示す図。(b)同様の場合において変速アームが車速最大位置であるときであってサーボバルブが後進位置に切り替えられた状態のサーボコントロール装置の動作態様を示す図。(c)同様の場合において変速アームが車速最大位置であるときであってサーボバルブが中立位置に復帰した状態のサーボコントロール装置の動作態様を示す図。
【図12】取付ロッド部と取付ネジ部との偏心量を示す断面図。
【図13】本発明の第二実施形態に係るサーボコントロール装置を示す側面断面図。
【図14】(a)本発明の第三実施形態に係るフィードバック機構を示す図。(b)同じく断面図。
【図15】(a)本発明の第四実施形態に係るフィードバック機構を示す図。(b)。同じく断面図。
【発明を実施するための形態】
【0018】
以下、本発明を実施するための形態について図面に基づき説明する。
【0019】
先ず、本発明の第一実施形態に係るトラクタの全体構成について、図1により説明する。
【0020】
図1に示すように、無段変速装置としての静油圧式無段変速装置Mは、作業車としてのトラクタに備えられる。なお、トラクタ以外の作業車としては、コンバイン、田植機等が挙げられる。トラクタは、機体フレーム77を備える。機体フレーム77には、前輪F及び後輪Rが備えられる。また、機体フレーム77の前部には、エンジンEが備えられる。エンジンEの後部には、クラッチハウジングCを介してミッションケース4が連結される。また、エンジンEは、ボンネット78で覆われる。ボンネット78の後部には、運転部79が備えられる。運転部79には、ステアリングハンドル80及び運転席81が備えられる。ステアリングハンドル80の左下側には、方向操作具としてのシャトルレバー31が備えられる。なお、シャトルレバー31は、運転席81の右側に配置されてもよい。また、運転席81の左側には、変速操作具としての変速レバー32が備えられる。
【0021】
次に、静油圧式無段変速装置Mについて、図2及び図3により説明する。
【0022】
図2及び図3に示すように、静油圧式無段変速装置Mは、油圧ポンプ1と、油圧モータ2と、を備える。油圧ポンプ1及び油圧モータ2は、ミッションケース4内に収容される。ミッションケース4の側面には、サーボコントロール装置3が付設される。
【0023】
油圧ポンプ1は、可変容量ポンプである。油圧ポンプ1は、入力軸としてのポンプ軸5を備える。ポンプ軸5には、エンジンEの動力が入力される。また、ポンプ軸5には、斜板としてのポンプ斜板6が傾動可能に設けられる。ポンプ斜板6には、ポンププランジャ7が当接されるとともに、油圧アクチュエータとしてのサーボシリンダ8のサーボピストン9が連結される。こうして、ポンプ軸5とともにポンプ斜板6が回転して、ポンプ斜板6に押動力が作用することにより、ポンププランジャ7が往復動する。
【0024】
油圧モータ2は、可変容量モータである。油圧モータ2は、出力軸としてのモータ軸10を備える。モータ軸10には、モータ斜板11が傾動可能に設けられる。モータ斜板11には、モータプランジャ12が当接される。こうして、モータプランジャ12が往復動してモータ斜板11に回転力が作用することにより、モータ軸10が回転する。
【0025】
次に、サーボコントロール装置3について、図4から図8により説明する。
【0026】
図4から図8に示すように、サーボコントロール装置3は、サーボシリンダ8と、サーボバルブ13と、フィードバック機構14と、位置決め機構15と、を備える。
【0027】
サーボシリンダ8は、油圧シリンダである。サーボシリンダ8は、サーボピストン9を備える。サーボピストン9は、ミッションケース4に形成されるピストン孔19に摺動可能に内挿される。サーボピストン9には、ポンプ斜板6が連結されるとともに、連結ロッド20を介してフィードバックレバー21の長手方向一端側が連結される。
【0028】
サーボバルブ13は、スプールバルブである。サーボバルブ13は、サーボスプール23を備える。サーボバルブ13は、バルブケース22内に収容される。バルブケース22には、油圧源24からの作動油が流れるメイン油路25、サーボ油路26、前進側ポート27及び後進側ポート28が形成される。メイン油路25と、前進側ポート27及び後進側ポート28とは、サーボ油路26を介して連通可能に接続される。サーボ油路26には、サーボスプール23が摺動可能に内挿される。
【0029】
フィードバック機構14は、フィードバック部材としてのフィードバックレバー21と、連結部材としての連結フォーク29と、連結ブロック30と、を備える。連結フォーク29には、シャトルレバー31がシャトルアーム33を介して連結されるとともに、変速レバー32が変速アーム37を介して連結される。
【0030】
シャトルアーム33は、シャトルレバー軸34を介して回動可能に軸支される。シャトルレバー軸34には、シャトルリンク31a及びシャトルロッド31bを介してシャトルレバー31が連結される。こうして、操作者がシャトルレバー31を傾動させることにより、シャトルアーム33がシャトルレバー軸34を支点にして回動する。つまり、シャトルアーム33がシャトルレバー軸34を支点にして中立位置から図5において紙面時計回りに回動すると前進位置となるとともに、図5において紙面反時計回りに回動すると後進位置となる。また、シャトルアーム33の長手方向一端側には、係合ピン35が設けられる。係合ピン35には、連結フォーク29の係合溝42が摺動可能に係合される。
【0031】
また、シャトルレバー軸34には、略扇形状に形成されたプレート82が設けられる。プレート82には、前進係合孔82a、中立係合孔82b及び後進係合孔82cが形成される。前進係合孔82a、中立係合孔82b及び後進係合孔82cは、シャトルレバー軸34を中心とする同一円弧上に形成される。前進係合孔82a、中立係合孔82b及び後進係合孔82cは、いずれも係合ボール83と係合可能とされる。係合ボール83は、スプリング84によって前進係合孔82a、中立係合孔82b及び後進係合孔82cのいずれかと係合するように付勢される。シャトルアーム33は、前進係合孔82a、中立係合孔82b及び後進係合孔82cと係合ボール83とが係合することにより、それぞれ前進位置、中立位置及び後進位置となる。
【0032】
変速アーム37は、変速レバー軸38を介して回動可能に軸支される。変速レバー軸38には、変速リンク32a及び変速ロッド32bを介して変速レバー32が連結される。こうして、操作者が変速レバー32を傾動させることにより、変速アーム37が変速レバー軸38を支点にして回動する。つまり、変速アーム37が変速レバー軸38を支点にして車速0位置から車速最大位置の範囲内で図5において紙面反時計回りに回動するのにしたがって走行速度が増加する。また、変速アーム37には、係合ピン39が設けられる。係合ピン39には、連結ブロック30の係合溝76が摺動可能に係合される。
【0033】
なお、本発明に係る方向操作具は、本実施形態に係るシャトルレバー31に限定されるものではない。例えば、本発明に係る方向操作具は、ペダルであってもよい。また、本発明に係る変速操作具は、本実施形態に係る変速レバー32に限定されるものではない。例えば、本発明に係る変速操作具は、ペダルであってもよい。
【0034】
フィードバックレバー21は、その長手方向一端側に連結ロッド20を介してサーボピストン9が連結されるとともに、その長手方向中間部に連結ピン40を介してサーボスプール23が連結される。また、フィードバックレバー21の長手方向他端側には、係合ピン41が設けられる。係合ピン41には、連結フォーク29の係合溝43が摺動可能に係合される。
【0035】
連結フォーク29は、係合溝42と、係合溝43と、支持軸44と、を備える。係合溝42は、連結フォーク29の長手方向一端側に形成される。係合溝42には、シャトルアーム33の係合ピン35が摺動可能に係合される。また、係合溝43は、連結フォーク29の長手方向他端側に形成される。係合溝43には、フィードバックレバー21の係合ピン41が摺動可能に係合される。また、支持軸44には、連結ブロック30及びスプリング受け86が回動可能に軸支される。スプリング受け86には、スプリング87の一端部が係止される。スプリング87の他端部は、バルブケース22の内壁に係止される(図3参照)。連結フォーク29は、スプリング87によって図5において紙面右側に付勢される。
【0036】
連結ブロック30は、変速アーム37を連結フォーク29に連結する。連結ブロック30は、その長手方向一端側に連結フォーク29の支持軸44が回動可能に軸支される。連結ブロック30の長手方向他端側には、係合溝76が形成される。係合溝76には、変速アーム37の係合ピン39が摺動可能に係合される。また、連結ブロック30は、取付軸45の取付ロッド部47に摺動可能に取り付けられる。
【0037】
次に、フィードバック機構14の動作態様について、図9から図11により説明する。
【0038】
図9(a)に示すように、シャトルアーム33が前進位置となる場合において、変速アーム37が車速0位置となるときは、フィードバックレバー21は、中立位置となる。このことは、シャトルアーム33がシャトルレバー軸34を支点にして前進位置側に回動すると、シャトルアーム33の係合ピン35及び連結フォーク29の係合溝42を介して、連結フォーク29が支持軸44を支点にして図9において紙面反時計回りに回動するが、フィードバックレバー21の係合ピン41は、中立位置から移動しないからである。
【0039】
この状態から、図9(b)に示すように、変速アーム37が変速レバー軸38を支点にして車速最大位置側に回動するのにしたがって、変速アーム37の係合ピン39及び連結ブロック30の係合溝76を介して、連結ブロック30が取付軸45の取付ロッド部47に沿って図9において紙面左側に摺動する。すると、フィードバックレバー21の係合ピン41及び連結フォーク29の係合溝43を介して、フィードバックレバー21が連結ロッド20を支点にして図9において紙面反時計回りに回動する。
【0040】
すると、フィードバックレバー21とサーボスプール23とが連結ピン40を介して連結されているため、フィードバックレバー21が連結ロッド20を支点にして図9において紙面反時計回りに回動するのにしたがって、サーボスプール23が図9において紙面上側に移動する。これにより、メイン油路25と前進側ポート27とがサーボ油路26を介して連通されて、作動油が前進側ポート27に流れるため、サーボピストン9が前進側に移動する。すると、サーボピストン9とサーボスプール23とがフィードバックレバー21を介して連結されているため、サーボピストン9が前進側に移動するのにしたがって、サーボスプール23が図9において紙面下側に移動する。
【0041】
そして、最終的には、図9(c)に示すように、サーボピストン9が前進側に移動し終えると、サーボスプール23が中立位置に復帰する。これにより、メイン油路25と前進側ポート27との連通が遮断されて、作動油が前進側ポート27に流れなくなる。つまり、フィードバック機構14によって、サーボシリンダ8の動作がサーボバルブ13に機械的に伝達されて、シャトルレバー31で設定された前進走行方向で且つ変速レバー32の操作位置に対応する位置にサーボシリンダ8が達すると、サーボバルブ13が中立位置に機械的に制御されてサーボシリンダ8が停止される。
【0042】
また、図10(a)に示すように、シャトルアーム33が中立位置となる場合において、変速アーム37が車速0位置となるときは、フィードバックレバー21は、中立位置から移動しない。同様に、図10(b)に示すように、シャトルアーム33が中立位置となる場合において、変速アーム37が車速最大位置となるときも、フィードバックレバー21は、中立位置から移動しない。このことは、変速アーム37が変速レバー軸38を支点にして車速最大位置側に回動するのにしたがって、変速アーム37の係合ピン39及び連結ブロック30の係合溝76を介して、連結ブロック30が取付軸45の取付ロッド部47に沿って図10において紙面左側に摺動するが、フィードバックレバー21の係合ピン41は、中立位置から移動しないからである。
【0043】
また、図11(a)に示すように、シャトルアーム33が後進位置となる場合において、変速アーム37が車速0位置となるときは、フィードバックレバー21は、中立位置から移動しない。このことは、シャトルアーム33がシャトルレバー軸34を支点にして後進位置側に回動すると、シャトルアーム33の係合ピン35及び連結フォーク29の係合溝42を介して、連結フォーク29が支持軸44を支点にして図11において紙面時計回りに回動するが、フィードバックレバー21の係合ピン41は、中立位置から移動しないからである。
【0044】
この状態から、図11(b)に示すように、変速アーム37が変速レバー軸38を支点にして車速最大位置側に回動するのにしたがって、変速アーム37の係合ピン39及び連結ブロック30の係合溝76を介して、連結ブロック30が取付軸45の取付ロッド部47に沿って図11において紙面左側に摺動する。すると、フィードバックレバー21の係合ピン41及び連結フォーク29の係合溝43を介して、フィードバックレバー21が連結ロッド20を支点にして図11において紙面時計回りに回動する。
【0045】
すると、フィードバックレバー21とサーボスプール23とが連結ピン40を介して連結されているため、フィードバックレバー21が連結ロッド20を支点にして図11において紙面時計回りに回動するのにしたがって、サーボスプール23が図11において紙面下側に移動する。これにより、メイン油路25と後進側ポート28とがサーボ油路26を介して連通されて、作動油が後進側ポート28に流れるため、サーボピストン9が後進側に移動する。すると、サーボピストン9とサーボスプール23とがフィードバックレバー21を介して連結されているため、サーボピストン9が後進側に移動するのにしたがって、サーボスプール23が図11において紙面上側に移動する。
【0046】
そして、最終的には、図11(c)に示すように、サーボピストン9が後進側に移動し終えると、サーボスプール23が中立位置に復帰する。これにより、メイン油路25と後進側ポート28との連通が遮断されて、作動油が後進側ポート28に流れなくなる。つまり、フィードバック機構14によって、サーボシリンダ8の動作がサーボバルブ13に機械的に伝達されて、シャトルレバー31で設定された後進走行方向で且つ変速レバー32の操作位置に対応する位置にサーボシリンダ8が達すると、サーボバルブ13が中立位置に機械的に制御されてサーボシリンダ8が停止される。
【0047】
次に、位置決め機構15について、図5及び図12により説明する。
【0048】
図5に示すように、位置決め機構15は、取付軸45と、規制軸46と、を備える。
【0049】
取付軸45は、取付ロッド部47と、取付ネジ部48と、を備える。取付軸45は、取付ネジ部48を介してバルブケース22に螺挿される。取付ロッド部47には、連結ブロック30が摺動可能に取り付けられる。図12に示すように、取付軸45は、取付ロッド部47と取付ネジ部48とが偏心して配置される。取付ロッド部47と取付ネジ部48との偏心量は、取付ロッド部47の軸心をO1とし、取付ネジ部48の軸心をO2とすると、Δrで表わされる。
【0050】
規制軸46は、規制ロッド部49と、規制ネジ部50と、を備える。規制軸46は、規制ネジ部50を介してバルブケース22に螺挿される。規制ロッド部49は、バルブケース22から所定の長さ(図5に示す出代L)突出する。出代Lは、規制軸46の螺挿量を変更することにより変更される。規制ロッド部49の突出先端部は、連結ブロック30の端面に当接する。
【0051】
次に、位置決め機構15によるフィードバックレバー21の位置決めの仕方について、図5により説明する。なお、ここでは、図5において紙面左右方向をY方向、図5において紙面上下方向をX方向として説明する。
【0052】
図5に示すように、先ず、フィードバックレバー21のX方向の位置を位置決めするには、取付軸45を回動させる。これにより、取付軸45の螺挿量が変更されて、取付ロッド部47がX方向に偏心量Δr分だけ移動する。つまり、取付ロッド部47の軸心O1は、取付ネジ部48の軸心O2を中心とする半径Δrの円の円周上を移動する。こうして、取付ロッド部47がX方向に偏心量Δr分だけ移動することにより、連結ブロック30を介してフィードバックレバー21が移動して、フィードバックレバー21のX方向の位置が位置決めされる。
【0053】
次に、フィードバックレバー21のY方向の位置を位置決めするには、規制軸46を回動させる。これにより、規制軸46の螺挿量が変更されて、規制ロッド部49の出代Lが変更される。こうして、規制ロッド部49の突出先端部と連結ブロック30の端面とが当接する位置が変更されて、フィードバックレバー21のY方向の位置、つまり、変速アーム37の中立位置(車速0位置)が位置決めされる。
【0054】
こうして、フィードバックレバー21のX方向及びY方向の位置を位置決めすることにより、変速レバー32(変速アーム37)及びシャトルレバー31(シャトルアーム33)が中立位置となるときに、サーボスプール23が中立位置となるように調節する。なお、前述のように、連結フォーク29は、スプリング87によって図5において紙面右側に付勢されるところ、連結フォーク29の支持軸44には、連結ブロック30が回動可能に軸支されるため、連結ブロック30も連結フォーク29と同様に付勢される。つまり、連結ブロック30がスプリング87によって図5において紙面右側に付勢されることにより、連結ブロック30の端面が規制ロッド部49の突出先端部に確実に当接するようにしている。
【0055】
以上のように、本発明の第一実施形態に係る作業車は、前進側及び後進側に変速自在な走行用の静油圧式無段変速装置Mと、人為的に操作されるもので前進又は後進の走行方向を設定するシャトルレバー31と、人為的に操作されるもので走行速度を設定する変速レバー32と、シャトルレバー31及び変速レバー32の操作位置に基づいて静油圧式無段変速装置Mを制御するサーボコントロール装置3と、を備え、サーボコントロール装置3は、静油圧式無段変速装置Mを制御するサーボシリンダ8と、サーボシリンダ8に作動油を給排してサーボシリンダ8を作動させるサーボバルブ13と、シャトルレバー31の操作位置をサーボバルブ13に機械的に伝達してサーボバルブ13を制御するシャトルアーム33と、変速レバー32の操作位置をサーボバルブ13に機械的に伝達してサーボバルブ13を制御する変速アーム37と、サーボシリンダ8の動作をサーボバルブ13に機械的に伝達して、シャトルレバー31で設定された走行方向で且つ変速レバー32の操作位置に対応する位置にサーボシリンダ8が達すると、サーボバルブ13を中立位置に機械的に制御してサーボシリンダ8を停止させるフィードバック機構14と、を備える。
【0056】
このような構成により、サーボコントロール装置3がフィードバック機構14を備えるいわゆる機械式とされることにより、土や泥等の付着に起因する電気的な故障の発生を防いで、サーボコントロール装置3の性能に対する信頼性を向上させることができる。また、走行方向と走行速度とをそれぞれ別々のシャトルレバー31と変速レバー32とで設定可能となるため、静油圧式無段変速装置Mを容易に操作することができる。例えば、走行速度を一定に維持しつつ走行方向を切り替えたい場合は、変速レバー32を操作せずにシャトルレバー31だけを操作して、容易に操作することができる。
【0057】
また、フィードバック機構14は、その長手方向一端側にサーボシリンダ8が連結されるとともに、その長手方向中間部にサーボバルブ13が連結されるフィードバックレバー21と、フィードバックレバー21の長手方向他端側が連結されるとともに、シャトルアーム33及び変速アーム37が連結される連結フォーク29と、を備える。
【0058】
このような構成により、サーボシリンダ8、シャトルレバー31及び変速レバー32の動作がフィードバックレバー21に集約されてサーボバルブ13に伝達されるため、フィードバック機構14に係る構造を簡素化することができる。
【0059】
また、サーボコントロール装置3は、フィードバックレバー21の中立位置とサーボバルブ13の中立位置とを調節可能に位置決めする位置決め機構15を備える。
【0060】
このような構成により、フィードバック機構14を構成する部材の部品精度を位置決めのためだけに上げる必要がないため、製造コストを低減することができる。また、長期間の使用による中立位置のズレを修正することができる。
【0061】
また、サーボコントロール装置3は、サーボバルブ13を収容するバルブケース22を備え、フィードバック機構14は、バルブケース22に支持される。
【0062】
このような構成により、フィードバック機構14とバルブケース22とがユニット化されるため、静油圧式無段変速装置Mを容易に組み立てることができる。
【0063】
次に、本発明の第二実施形態に係る無段変速装置について、図13により説明する。なお、第一実施形態と同一符号の部材については、第一実施形態と同一構造であるため詳細な説明を省略する。
【0064】
図13に示すように、第二実施形態においては、サーボコントロール装置103は、高圧リリーフバルブ16と、低圧リリーフバルブ17と、を備える。また、シャトルアーム133の長手方向他端側には、係合ピン36が設けられる。
【0065】
高圧リリーフバルブ16は、作動油の圧力が所定の設定圧力(高リリーフ圧力)に達すると作動油をリリーフする。高圧リリーフバルブ16は、高圧リリーフ弁体51と、高圧リリーフスプリング52と、を備える。バルブケース22には、メイン油路25に接続される高圧リリーフ油路53が形成される。高圧リリーフ油路53には、高圧リリーフ弁体51が摺動可能に内挿される。高圧リリーフ弁体51は、高圧リリーフスプリング52によって閉弁するように付勢される。
【0066】
低圧リリーフバルブ17は、作動油の圧力が所定の設定圧力(低リリーフ圧力)に達すると作動油をリリーフする。なお、低圧リリーフバルブ17の設定圧力(低リリーフ圧力)は、高圧リリーフバルブ16の設定圧力(高リリーフ圧力)よりも低い。低圧リリーフバルブ17は、低圧リリーフ弁体54と、低圧リリーフスプリング55と、を備える。バルブケース22には、メイン油路25に接続される低圧リリーフ油路56が形成される。低圧リリーフ油路56には、低圧リリーフ弁体54が摺動可能に内挿される。低圧リリーフ弁体54は、低圧リリーフスプリング55によって閉弁するように付勢される。低圧リリーフスプリング55は、高圧リリーフスプリング52よりも低いばね定数を有する。また、低圧リリーフ油路56には、シャトルスプール57が摺動可能に内挿される。
【0067】
シャトルスプール57は、その長手方向一端側の軸心部にスプール油路58が形成される。スプール油路58は、メイン油路25と低圧リリーフ油路56とを連通可能に接続する。また、シャトルスプール57の長手方向他端側の外周には、前進係合溝59、中立係合溝60及び後進係合溝61が形成される。
【0068】
前進係合溝59、中立係合溝60及び後進係合溝61は、いずれも係合ボール62と係合可能とされる。係合ボール62は、スプリング63によって前進係合溝59、中立係合溝60及び後進係合溝61のいずれかと係合するように付勢される。シャトルスプール57は、低圧リリーフ油路56内を摺動して前進係合溝59、中立係合溝60及び後進係合溝61と係合ボール62とが係合することにより、それぞれ前進位置、中立位置及び後進位置となる。また、シャトルスプール57の長手方向中間部の外周には、係合溝64が形成される。係合溝64には、シャトルアーム133の係合ピン36が摺動可能に係合される。
【0069】
次に、高圧リリーフバルブ16及び低圧リリーフバルブ17の動作態様について、図13により説明する。
【0070】
図13に示すように、先ず、シャトルスプール57が中立位置となる(シャトルスプール57の中立係合溝60と係合ボール62とが係合する)場合は、シャトルスプール57のスプール油路58を介してメイン油路25と低圧リリーフ油路56とが連通されるため、低圧リリーフバルブ17によって作動油がリリーフされることになる。つまり、シャトルスプール57が中立位置となる場合、メイン油路25は、高圧リリーフ油路53と連通されているが、スプール油路58を介して低圧リリーフ油路56とも連通されているため、作動油の圧力が高圧リリーフバルブ16の設定圧力(高リリーフ圧力)に達する前に低圧リリーフバルブ17の設定圧力(低リリーフ圧力)に達すると、低圧リリーフバルブ17によって作動油がリリーフされることになる。
【0071】
次に、シャトルスプール57が前進位置となる(シャトルスプール57の前進係合溝59と係合ボール62とが係合する)場合は、メイン油路25と低圧リリーフ油路56との連通が遮断されるため、高圧リリーフバルブ16によって作動油がリリーフされることになる。つまり、シャトルアーム133がシャトルレバー軸34を支点にして前進位置側に回動すると、シャトルアーム133の係合ピン36及びシャトルスプール57の係合溝64を介して、シャトルスプール57が図13において紙面上側に摺動する。すると、メイン油路25と低圧リリーフ油路56との連通が遮断されるため、作動油の圧力が高圧リリーフバルブ16の設定圧力(高リリーフ圧力)に達すると、高圧リリーフバルブ16によって作動油がリリーフされることになる。
【0072】
次に、シャトルスプール57が後進位置となる(シャトルスプール57の後進係合溝61と係合ボール62とが係合する)場合も、メイン油路25と低圧リリーフ油路56との連通が遮断されるため、高圧リリーフバルブ16によって作動油がリリーフされることになる。つまり、シャトルアーム133がシャトルレバー軸34を支点にして後進位置側に回動すると、シャトルアーム133の係合ピン36及びシャトルスプール57の係合溝64を介して、シャトルスプール57が図13において紙面下側に摺動する。すると、メイン油路25と低圧リリーフ油路56との連通が遮断されるため、作動油の圧力が高圧リリーフバルブ16の設定圧力(高リリーフ圧力)に達すると、高圧リリーフバルブ16によって作動油がリリーフされることになる。
【0073】
以上のように、本発明の第二実施形態に係るサーボコントロール装置103は、サーボバルブ13が前進位置又は後進位置に切り替えられる場合に作動油をリリーフする高圧リリーフバルブ16と、サーボバルブ13が中立位置に切り替えられる場合に高圧リリーフバルブ16よりも低い設定圧力で作動油をリリーフする低圧リリーフバルブ17と、を備える。
【0074】
このような構成により、サーボバルブ13が中立位置に切り替えられる場合には、低圧リリーフバルブ17によって低い設定圧力で作動油がリリーフされる。このため、例えば、走行速度が高い状態でサーボバルブ13が前進位置又は後進位置から中立位置を経て前進位置又は後進位置に切り替えられるとき(つまり、高速で走行中にトラクタが急停止して急発進するとき)には、作動油の圧力が低い状態を経ることになる。よって、高圧の作動油によるサーボシリンダ8の急激な作動を防止して、サーボバルブ13の切替時に生じる衝撃を低減することができる。
【0075】
次に、本発明の第三実施形態に係る無段変速装置について、図14により説明する。なお、第一実施形態と同一符号の部材については、第一実施形態と同一構造であるため詳細な説明を省略する。
【0076】
図14に示すように、第三実施形態においては、フィードバック機構114は、フィードバック部材としてのフィードバックレバー121と、連結部材としての連結レバー129と、を備える。
【0077】
フィードバックレバー121は、その長手方向一端側にサーボピストン9が連結されるとともに、その長手方向中間部に連結ピン40を介してサーボスプール23が連結される。フィードバックレバー121の長手方向一端部には、サーボピストン9に形成される係合溝9aと係合する係合部121aが形成される。フィードバックレバー121の長手方向他端側には、連結ピン65を介して連結レバー129の長手方向他端側が回動可能に連結される。
【0078】
連結レバー129は、係合ピン66と、係合溝68と、を備える。係合ピン66は、連結レバー129の長手方向一端側に設けられる。係合ピン66には、シャトルアーム133の係合溝67が係合される。また、係合溝68は、連結レバー129の長手方向他端側に形成される。係合溝68には、変速アーム137の係合ピン69が摺動可能に係合される。また、連結レバー129は、その長手方向他端側が連結ピン65を介してフィードバックレバー121の長手方向他端側に回動可能に連結される。
【0079】
シャトルアーム133は、その長手方向に移動可能とされる。シャトルアーム133の長手方向一端側には、係合溝67が形成される。係合溝67には、連結レバー129の係合ピン66が係合される。また、シャトルアーム133の外周には、前進係合溝70、中立係合溝71及び後進係合溝72が形成される。前進係合溝70、中立係合溝71及び後進係合溝72は、いずれも係合ボール73と係合可能とされる。係合ボール73は、スプリング85によって前進係合溝70、中立係合溝71及び後進係合溝72のいずれかと係合するように付勢される。シャトルアーム133は、その長手方向に移動して前進係合溝70、中立係合溝71及び後進係合溝72と係合ボール73とが係合することにより、それぞれ前進位置、中立位置及び後進位置となる。
【0080】
変速アーム137は、その長手方向に移動可能とされる。つまり、変速アーム137は、図14において紙面左側に移動するのにしたがって走行速度が増加する。また、変速アーム137の長手方向一端側には、係合ピン69が設けられる。係合ピン69には、連結レバー129の係合溝68が摺動可能に係合される。
【0081】
これにより、シャトルアーム133が前進位置となる(シャトルアーム133の前進係合溝70と係合ボール73とが係合する)と、連結レバー129が連結ピン65を支点にして図14(a)において紙面時計回りに回動する。このとき、変速アーム137が図14において紙面左側(走行速度増加側)に移動すると、連結レバー129は、係合ピン66を支点にして図14(a)において紙面時計回りに回動する。すると、フィードバックレバー121は、その長手方向一端側(サーボピストン9側)を支点にして図14(a)において紙面時計回りに回動する。
【0082】
すると、フィードバックレバー121とサーボスプール23とが連結ピン40を介して連結されているため、フィードバックレバー121がその長手方向一端側(サーボピストン9側)を支点にして図14(a)において紙面時計回りに回動するのにしたがって、サーボスプール23が図14(a)において紙面下側に移動する。これにより、作動油が図示しない前進側ポートに流れるため、サーボピストン9が前進側に移動する。すると、サーボピストン9とサーボスプール23とがフィードバックレバー121を介して連結されているため、サーボピストン9が前進側に移動するのにしたがって、サーボスプール23が図14(a)において紙面上側に移動する。
【0083】
そして、最終的には、サーボピストン9が前進側に移動し終えると、サーボスプール23が中立位置に復帰する。これにより、作動油が前記前進側ポートに流れなくなる。
【0084】
また、シャトルアーム133が後進位置となる(シャトルアーム133の後進係合溝72と係合ボール73とが係合する)と、連結レバー129が連結ピン65を支点にして図14(a)において紙面反時計回りに回動する。このとき、変速アーム137が図14において紙面左側(走行速度増加側)に移動すると、連結レバー129は、係合ピン66を支点にして図14(a)において紙面反時計回りに回動する。すると、フィードバックレバー121は、その長手方向一端側(サーボピストン9側)を支点にして図14(a)において紙面反時計回りに回動する。
【0085】
すると、フィードバックレバー121とサーボスプール23とが連結ピン40を介して連結されているため、フィードバックレバー121がその長手方向一端側(サーボピストン9側)を支点にして図14(a)において紙面反時計回りに回動するのにしたがって、サーボスプール23が図14(a)において紙面上側に移動する。これにより、作動油が図示しない後進側ポートに流れるため、サーボピストン9が後進側に移動する。すると、サーボピストン9とサーボスプール23とがフィードバックレバー121を介して連結されているため、サーボピストン9が後進側に移動するのにしたがって、サーボスプール23が図14において紙面下側に移動する。
【0086】
そして、最終的には、サーボピストン9が後進側に移動し終えると、サーボスプール23が中立位置に復帰する。これにより、作動油が前記後進側ポートに流れなくなる。
【0087】
なお、詳細な説明は省略するが、シャトルアーム133が中立位置となる(シャトルアーム133の中立係合溝71と係合ボール73とが係合する)ときに、変速アーム137が図14において紙面左側(走行速度増加側)に移動しても、変速アーム137の係合ピン69が連結レバー129の係合溝68内を摺動するだけで、フィードバックレバー121は、中立位置から移動しない。
【0088】
次に、本発明の第四実施形態に係る無段変速装置について、図15により説明する。なお、第一及び第三実施形態と同一符号の部材については、第一及び第三実施形態と同一構造であるため詳細な説明を省略する。
【0089】
図15に示すように、第四実施形態においては、フィードバック機構214は、変速アーム237の係合ピン74が連結レバー129の係合溝68に摺動可能に係合される。
【0090】
変速アーム237は、変速アーム軸75を介して回動可能に軸支される。つまり、変速アーム237は、変速アーム軸75を支点にして図15(a)において紙面時計回りに回動するのにしたがって走行速度が増加する。また、変速アーム237には、係合ピン74が設けられる。係合ピン74には、連結レバー129の係合溝68が摺動可能に係合される。
【0091】
これにより、シャトルアーム133が前進位置となる(シャトルアーム133の前進係合溝70と係合ボール73とが係合する)ときに、変速アーム237が変速アーム軸75を支点にして図15(a)において紙面時計回り(走行速度増加側)に回動すると、連結レバー129は、係合ピン66を支点にして図15(a)において紙面時計回りに回動する。すると、フィードバックレバー121は、その長手方向一端側(サーボピストン9側)を支点にして図15(a)において紙面時計回りに回動する。なお、その後は図15の場合と同様に、サーボスプール23が移動して作動油が図示しない前進側ポートに流れてサーボピストン9が前進側に移動するとともに、その後サーボスプール23が中立位置に復帰する。
【0092】
また、シャトルアーム133が後進位置となる(シャトルアーム133の後進係合溝72と係合ボール73とが係合する)ときに、変速アーム237が変速アーム軸75を支点にして図15(a)において紙面時計回り(走行速度増加側)に回動すると、連結レバー129は、係合ピン66を支点にして図15(a)において紙面反時計回りに回動する。すると、フィードバックレバー121は、その長手方向一端側(サーボピストン9側)を支点にして図15(a)において紙面反時計回りに回動する。なお、その後は図15の場合と同様に、サーボスプール23が移動して作動油が図示しない後進側ポートに流れてサーボピストン9が後進側に移動するとともに、その後サーボスプール23が中立位置に復帰する。
【0093】
なお、詳細な説明は省略するが、シャトルアーム133が中立位置となる(シャトルアーム133の中立係合溝71と係合ボール73とが係合する)ときに、変速アーム237が変速アーム軸75を支点にして図15(a)において紙面時計回り(走行速度増加側)に回動しても、変速アーム237の係合ピン74が連結レバー129の係合溝68内を摺動するだけで、フィードバックレバー121は、中立位置から移動しない。
【0094】
なお、本発明の各実施形態においては、無段変速装置として静油圧式無段変速装置Mを想定しているが、無段変速装置は、静油圧式無段変速装置と遊星歯車とを組み合わせて構成される油圧機械式無段変速装置であってもよい。
【産業上の利用可能性】
【0095】
本発明は、無段変速装置(例えば、静油圧式無段変速装置、油圧機械式無段変速装置)を備える作業車に利用可能である。
【符号の説明】
【0096】
1 油圧ポンプ
3 サーボコントロール装置
6 ポンプ斜板(斜板)
8 サーボシリンダ(油圧アクチュエータ)
13 サーボバルブ
14 フィードバック機構
15 位置決め機構
16 高圧リリーフバルブ
17 低圧リリーフバルブ
21 フィードバックレバー(フィードバック部材)
22 バルブケース
29 連結フォーク(連結部材)
31 シャトルレバー(方向操作具)
32 変速レバー(変速操作具)
33 シャトルアーム(方向連係機構)
37 変速アーム(変速連係機構)
103 サーボコントロール装置
114 フィードバック機構
121 フィードバックレバー(フィードバック部材)
129 連結レバー(連結部材)
133 シャトルアーム(方向連係機構)
214 フィードバック機構
M 静油圧式無段変速装置(無段変速装置)
【特許請求の範囲】
【請求項1】
前進側及び後進側に変速自在な走行用の無段変速装置と、
人為的に操作されるもので前進又は後進の走行方向を設定する方向操作具と、
人為的に操作されるもので走行速度を設定する変速操作具と、
前記方向操作具及び前記変速操作具の操作位置に基づいて前記無段変速装置を制御するサーボコントロール装置と、を備え、
前記サーボコントロール装置は、
前記無段変速装置を制御する油圧アクチュエータと、
前記油圧アクチュエータに作動油を給排して前記油圧アクチュエータを作動させるサーボバルブと、
前記方向操作具の操作位置を前記サーボバルブに機械的に伝達して前記サーボバルブを制御する方向連係機構と、
前記変速操作具の操作位置を前記サーボバルブに機械的に伝達して前記サーボバルブを制御する変速連係機構と、
前記油圧アクチュエータの動作を前記サーボバルブに機械的に伝達して、前記方向操作具で設定された走行方向で且つ前記変速操作具の操作位置に対応する位置に前記油圧アクチュエータが達すると、前記サーボバルブを中立位置に機械的に制御して前記油圧アクチュエータを停止させるフィードバック機構と、を備える作業車。
【請求項2】
前記フィードバック機構は、
その長手方向一端側に前記油圧アクチュエータが連結されるとともに、その長手方向中間部に前記サーボバルブが連結されるフィードバック部材と、
前記フィードバック部材の長手方向他端側が連結されるとともに、前記方向連係機構及び前記変速連係機構が連結される連結部材と、を備える請求項1に記載の作業車。
【請求項3】
前記サーボコントロール装置は、
前記フィードバック部材の中立位置と前記サーボバルブの中立位置とを調節可能に位置決めする位置決め機構を備える請求項2に記載の作業車。
【請求項4】
前記サーボコントロール装置は、
前記サーボバルブが前進位置又は後進位置に切り替えられる場合に作動油をリリーフする高圧リリーフバルブと、
前記サーボバルブが中立位置に切り替えられる場合に前記高圧リリーフバルブよりも低い設定圧力で作動油をリリーフする低圧リリーフバルブと、を備える請求項1から請求項3までのいずれか一項に記載の作業車。
【請求項5】
前記サーボコントロール装置は、
前記サーボバルブを収容するバルブケースを備え、
前記フィードバック機構は、前記バルブケースに支持される請求項1から請求項4までのいずれか一項に記載の作業車。
【請求項1】
前進側及び後進側に変速自在な走行用の無段変速装置と、
人為的に操作されるもので前進又は後進の走行方向を設定する方向操作具と、
人為的に操作されるもので走行速度を設定する変速操作具と、
前記方向操作具及び前記変速操作具の操作位置に基づいて前記無段変速装置を制御するサーボコントロール装置と、を備え、
前記サーボコントロール装置は、
前記無段変速装置を制御する油圧アクチュエータと、
前記油圧アクチュエータに作動油を給排して前記油圧アクチュエータを作動させるサーボバルブと、
前記方向操作具の操作位置を前記サーボバルブに機械的に伝達して前記サーボバルブを制御する方向連係機構と、
前記変速操作具の操作位置を前記サーボバルブに機械的に伝達して前記サーボバルブを制御する変速連係機構と、
前記油圧アクチュエータの動作を前記サーボバルブに機械的に伝達して、前記方向操作具で設定された走行方向で且つ前記変速操作具の操作位置に対応する位置に前記油圧アクチュエータが達すると、前記サーボバルブを中立位置に機械的に制御して前記油圧アクチュエータを停止させるフィードバック機構と、を備える作業車。
【請求項2】
前記フィードバック機構は、
その長手方向一端側に前記油圧アクチュエータが連結されるとともに、その長手方向中間部に前記サーボバルブが連結されるフィードバック部材と、
前記フィードバック部材の長手方向他端側が連結されるとともに、前記方向連係機構及び前記変速連係機構が連結される連結部材と、を備える請求項1に記載の作業車。
【請求項3】
前記サーボコントロール装置は、
前記フィードバック部材の中立位置と前記サーボバルブの中立位置とを調節可能に位置決めする位置決め機構を備える請求項2に記載の作業車。
【請求項4】
前記サーボコントロール装置は、
前記サーボバルブが前進位置又は後進位置に切り替えられる場合に作動油をリリーフする高圧リリーフバルブと、
前記サーボバルブが中立位置に切り替えられる場合に前記高圧リリーフバルブよりも低い設定圧力で作動油をリリーフする低圧リリーフバルブと、を備える請求項1から請求項3までのいずれか一項に記載の作業車。
【請求項5】
前記サーボコントロール装置は、
前記サーボバルブを収容するバルブケースを備え、
前記フィードバック機構は、前記バルブケースに支持される請求項1から請求項4までのいずれか一項に記載の作業車。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−96449(P2013−96449A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−237572(P2011−237572)
【出願日】平成23年10月28日(2011.10.28)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月28日(2011.10.28)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
[ Back to top ]