
侵入物体識別方法、侵入物体識別装置、及び侵入物体識別センサ装置
【課題】漏洩同軸ケーブルを使用して電波により検知対象の侵入物体を検知するものにおいて、本来検知したくない小さな飛来物や小動物や水滴等の非検知対象の物体を認識せず、本来検知したい侵入者等、つまり検知対象の侵入物体を識別できるようにする。
【解決手段】侵入物体識別センサ装置100が侵入物体を検知してから侵入物体識別センサ装置100が前記侵入物体を検知しなくなるまでの間における、電波受信手段401の受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、本来検知したい検知対象の侵入物体300を識別するものである。
【解決手段】侵入物体識別センサ装置100が侵入物体を検知してから侵入物体識別センサ装置100が前記侵入物体を検知しなくなるまでの間における、電波受信手段401の受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、本来検知したい検知対象の侵入物体300を識別するものである。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、侵入物体の侵入を監視したい領域や境界に漏洩同軸ケーブルを配置し、その漏洩同軸ケーブルに接近し、横切り、通過して侵入防止エリアに侵入する検知対象の侵入物体の識別を電波で行う侵入物体識別方法、侵入物体識別装置、及び侵入物体識別センサ装置に関するものである。
【背景技術】
【0002】
侵入物体の侵入を監視したい領域や境界に漏洩同軸ケーブルを配置しその漏洩同軸ケーブルを横切って侵入防止エリアに侵入する侵入物体を検知する従来の侵入検知装置においては、送信用漏洩同軸ケーブルから電波を放射した電波を受信用漏洩同軸ケーブルで受信し、この受信信号のレベルを監視する。上記漏洩同軸ケーブル間に物体が侵入すると電波が遮断され受信信号のレベルが低下するので、受信信号のレベルを所定のしきい値で常時判定しており、受信信号のレベルがそのしきい値を下回ったとき、「侵入物体あり」と判定して警報を出力する構成である。(例えば、特許第3703689号公報、特開平10−95338号公報を参照。)
【0003】
【特許文献1】特許第3703689号公報(図1及びその説明)
【特許文献2】特開平10−95338号公報(図3、図4及びその説明)
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来の漏洩同軸ケーブルを用いた侵入物体検知装置は、受信信号のレベルの低下をしきい値判定しているだけであるため、本来検出したくない鳥等の小さな飛来物や犬猫等の小動物、漏洩同軸ケーブルを林内に敷設した場合における木々の葉からの風により纏まって落ちてくる水滴が漏洩同軸ケーブルに接触した場合等、受信用漏洩同軸ケーブルが受信した受信信号の受信レベルは低下する。
小動物であっても漏洩同軸ケーブルに近ければ受信信号の変化量は大きくなるため、受信信号のレベルが低下し「侵入者あり」の誤報を出力する課題があった。
また、降雨によって漏洩同軸ケーブルそのものや、その周りの地面や壁や柱が濡れることで反射、透過係数が変化し、それによって受信信号のレベルが変化し「侵入者あり」の誤報を出力する課題があった。
更に、従来の侵入検知装置は、しきい値を下回った瞬間に「侵入者あり」の警報を出力するため、本来検出したくない小さな飛来物や小動物や水滴がアンテナである漏洩同軸ケーブルに接触した瞬間にレベルが低下し、この状態でしきい値判定を行って「侵入者あり」の誤報を出力する課題があった。
【0005】
この発明は前述のような実情に鑑みてなされたものであり、本来検知したくない小さな飛来物や小動物や水滴等の非検知対象の物体を認識せず、本来検知したい侵入者等、つまり検知対象の侵入物体を識別できるようにすることを目的とするものである。
【課題を解決するための手段】
【0006】
この発明に係る侵入物体識別方法は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段とこの電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別するものである。
【0007】
また、この発明に係る侵入物体識別方法は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段とこの電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別するものである。
【0008】
また、この発明に係る侵入物体識別装置は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別するものである。
【0009】
また、この発明に係る侵入物体識別装置は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置を備え、前記第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別するものである。
【0010】
また、この発明に係る侵入物体識別装置は、少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段、受信信号を送信から受信までの伝搬時間だけ遅延した複素受信信号を抽出する直交検波手段、前記複素受信信号を距離毎に蓄積する第1の複素信号蓄積手段、前記第1の複素信号蓄積手段に蓄積された現時点から所定の過去時間までの前記複素受信信号を使って、所定の第1の複素演算によって侵入物体の侵入状態値を出力する第1の演算手段、この第1の演算手段が演算した前記侵入状態値が、予め設定した所定のしきい値を超えていた場合に第1の侵入出力を出す第1の侵入判別出力手段、前記第1の侵入出力が出されるとその後の前記複素受信信号を所定の時間だけ蓄積する第2の複素信号蓄積手段、前記第2の複素信号蓄積手段が蓄積した複素受信信号を使って、所定の第2の複素演算によって前記侵入物体の移動状態の出力を出す第2の演算手段、及びこの第2の演算手段の前記移動状態の出力から検知対象の侵入物体の侵入を判別し、前記検知対象の侵入物体が侵入したこと及びその侵入地点の距離を出力する第2の侵入判別出力手段を備えたものである。
【0011】
また、この発明に係る侵入物体識別センサ装置は、少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段のうちの前記電波送信手段が放射した電波を受信し受信信号を出力する電波受信手段の受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置において、前記侵入物体の検知から前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する所定時間侵入継続判定部を備えているものである。
【発明の効果】
【0012】
この発明は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段とこの電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別するので、本来検知したくない物体を認識せず、本来検知したい侵入者等、つまり検知対象の侵入物体を識別できる効果がある。
【0013】
また、この発明は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段とこの電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別するので、本来検知したくない物体を認識せず、本来検知したい侵入者等、つまり検知対象の侵入物体を識別できる効果がある。
【0014】
また、この発明は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別するので、本来検知したくない物体を認識せず、本来検知したい侵入者等、つまり検知対象の侵入物体を識別できる効果がある。
【0015】
また、この発明は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置を備え、前記第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別するので、本来検知したくない物体を認識せず、本来検知したい侵入者等、つまり検知対象の侵入物体を識別できる効果がある。
【0016】
この発明は、少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段、受信信号を送信から受信までの伝搬時間だけ遅延した複素受信信号を抽出する直交検波手段、前記複素受信信号を距離毎に蓄積する第1の複素信号蓄積手段、前記第1の複素信号蓄積手段に蓄積された現時点から所定の過去時間までの前記複素受信信号を使って、所定の第1の複素演算によって侵入物体の侵入状態値を出力する第1の演算手段、この第1の演算手段が演算した前記侵入状態値が、予め設定した所定のしきい値を超えていた場合に第1の侵入出力を出す第1の侵入判別出力手段、前記第1の侵入出力が出されるとその後の前記複素受信信号を所定の時間だけ蓄積する第2の複素信号蓄積手段、前記第2の複素信号蓄積手段が蓄積した複素受信信号を使って、所定の第2の複素演算によって前記侵入物体の移動状態の出力を出す第2の演算手段、及びこの第2の演算手段の前記移動状態の出力から検知対象の侵入物体の侵入を判別し、前記検知対象の侵入物体が侵入したこと及びその侵入地点の距離を出力する第2の侵入判別出力手段を備えているので、本来検知したくない物体を認識せず、本来検知したい侵入者等、つまり検知対象の侵入物体を識別できる効果がある。
【0017】
この発明は、少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段のうちの前記電波送信手段が放射した電波を受信し受信信号を出力する電波受信手段の受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置において、前記侵入物体の検知から前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する所定時間侵入継続判定部を備えているので、本来検知したくない物体を認識せず、本来検知したい侵入者等、つまり検知対象の侵入物体を識別できる効果がある。
【発明を実施するための最良の形態】
【0018】
実施の形態1.
以下この発明の実施の形態1を図1〜図5により説明する。図1は侵入物体識別方法を実行する侵入物体識別装置のシステム構成の一例および当該侵入物体識別装置における侵入物体識別センサ装置の内部構成の一例を例示する図、図2は侵入物体毎の受信信号における基本波(侵入物体に遮られずに送信用漏洩同軸ケーブルから受信用漏洩同軸ケーブルに直接受信される電波)のベクトルである基本ベクトルと、侵入物体から反射して受信用漏洩同軸ケーブルに受信される反射波のベクトルである反射波ベクトルとの合成ベクトルの、侵入物体侵入状態の経時変化に伴う軌跡(ベクトル軌跡)を例示する図で、(a)は侵入物体が人の場合の侵入形態の事例、(A)は侵入物体が人の場合に対応するベクトル軌跡の実測事例、(b)は侵入物体が鳥の場合の侵入形態の事例、(B)は侵入物体が鳥の場合に対応するベクトル軌跡の実測事例、(c)は侵入物体が漏洩同軸ケーブルのそばにできた水溜り(漏洩同軸ケーブルに物理的には侵入はしないが、水溜りからの反射波が受信信号に影響することから等価的侵入物体である)の場合の侵入形態の事例、(C)は侵入物体が水溜り場合に対応するベクトル軌跡の実測事例、をそれぞれ例示してある。図3は検知対象の侵入物体(人)等の侵入過程と、基本波(侵入物体に遮られずに送信用漏洩同軸ケーブルから受信用漏洩同軸ケーブルに直接受信される電波)および侵入物体から反射して受信用漏洩同軸ケーブルに受信される反射波との関係の説明図、図4は基本ベクトルと反射波ベクトルと合成ベクトルとを複素平面で例示した図、図5は合成ベクトルの変化の状態を、縦軸を電界強度、横軸を時間(経過時間)として例示する図である。
以下、この発明の実施の形態1を図1に基づいて説明する。
【0019】
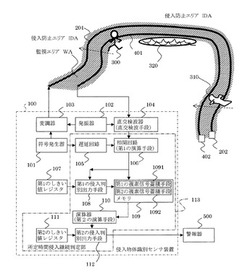
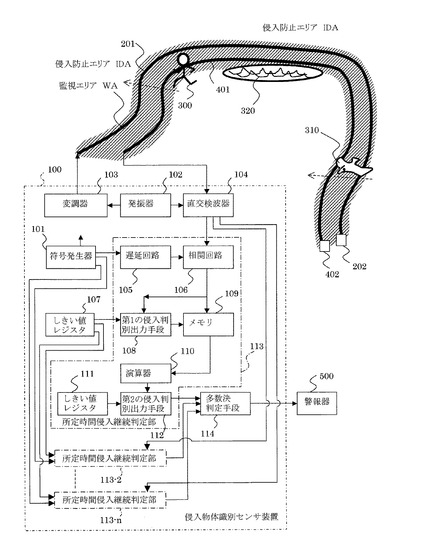
本実施の形態1の侵入物体識別システムは、図1に例示するように、侵入物体識別センサ装置100、送信漏洩同軸ケーブル(電波送信手段)201、受信漏洩同軸ケーブル(電波受信手段)401、および警報器500で構成されている。なお、202は送信漏洩同軸ケーブル(電波送信手段)201の終端器、402は受信漏洩同軸ケーブル(電波受信手段)401の終端器である。
【0020】
前記侵入物体識別センサ装置100は、符号発生器101、発振器102、変調器103、直交検波器(直交検波手段) 104、遅延回路105、第1の演算手段でもある相関回路(以下、“相関回路”と記す)106、第1のしきい値レジスタ107、判定器からなる第1の侵入判別出力手段(以下、“判定器”と記す)108、メモリ109、第2の演算手段である演算器(以下、“演算器”と記す)110、第2のしきい値レジスタ111、および判定器からなる第2の侵入判別出力手段(以下、“判定器”と記す)112で構成されている。
【0021】
前記メモリ109は、第1の複素信号蓄積手段1091、および第2の複素信号蓄積手段1092を有している。
【0022】
前記遅延回路105、前記相関回路(第1の演算手段)106、前記第1の侵入判別出力手段108、前記メモリ109、前記演算器(第2の演算手段)110、第2のしきい値レジスタ111、および第2の侵入判別出力手段112は、所定時間侵入継続判定部113を構成している。
【0023】
図1において、前記侵入物体識別センサ装置100には、前記送信用漏洩同軸ケーブルからなる電波送信手段201と、前記受信用漏洩同軸ケーブルからなる電波受信手段401が接続されている。
【0024】
前記侵入物体識別センサ装置100が出力する送信信号は、前記送信用漏洩同軸ケーブルからなる電波送信手段201から、送信電波として放射される。
【0025】
前記送信用漏洩同軸ケーブルからなる電波送信手段201から放射された送信電波は、侵入防止(または禁止)エリアIDAに侵入するために監視エリアWA(漏洩同軸ケーブルからなる前記電波送信手段201と前記電波受信手段401との間およびその近傍)に近づいてくる本来検知したい侵入者(人)等のいわゆる前記検知対象の侵入物体300で反射し、その反射波が前記受信用漏洩同軸ケーブルからなる電波受信手段401で受信され、受信信号として前記侵入物体識別センサ装置100に入力される。
【0026】
一方、例えば本来検知する必要のない鳥310などの高速に監視エリアWAを通過する物体がある場合、この様に小動物(小物体)であっても前記漏洩同軸ケーブルからなる電波送信手段201、電波受信手段401に接近すれば観測される反射強度が強いため、この反射信号が前記送信用漏洩同軸ケーブルからなる電波受信手段401で受信される場合もある。
【0027】
また、降雨などによる監視エリアWAの地面の濡れ320によっても電波が反射され、この反射信号が前記受信用漏洩同軸ケーブルからなる電波受信手段401で受信される場合もある。
【0028】
侵入物体識別センサ装置100は、これらの各種の反射信号を特定の処理によって、本来検知する必要のある検知対象の侵入物体300を検知し警報器500を差動させる。
【0029】
この特定の処理を行う前記侵入物体識別センサ装置100の内部動作を、以下に、説明する。
【0030】
前記符号発生器101は、周知のPN符号等の擬似ランダム符号を発生させる装置である。
【0031】
前記変調器103は、前記符号発生器101が発生した符号信号によって前記発振器102が出力する搬送波を変調し、漏洩同軸ケーブルからなる前記電波送信手段201に出力する。
【0032】
漏洩同軸ケーブルからなる前記電波受信手段401が受信した受信信号は、周知の前記直交検波器104で、前記発振器102が出力する搬送波に基づいて直交検波される。前記直交検波器104は、直交検波によってI信号とQ信号を出力する。ここではI信号とQ信号をまとめて複素信号と呼ぶ。
【0033】
前記複素信号は、前記相関回路106に入力される。前記符号発生器101が発生した符合信号はフリップフロップ等で構成される前記遅延回路105で遅延し、その遅延符号信号が前記相関回路106に入力される。
【0034】
前記相関回路106は、前記遅延符号信号と前記複素信号との複素相関値を計算し出力する。前記複素相関値とは、I信号と遅延符号信号との相関値I、Q信号と遅延符号信号との相関値Qをまとめて呼んだものである。
【0035】
前記遅延回路105は、漏洩同軸ケーブルからなる前記電波送信手段201から放射されら送信電波が漏洩同軸ケーブルからなる前記電波送信手段401で直接受信され受信信号が直交検波され相関回路106に入力されるまでの伝搬遅延時間に相当する時間だけ遅延させる。
【0036】
このようにすることによって、漏洩同軸ケーブルからなる前記電波送信手段201と漏洩同軸ケーブルからなる前記電波受信手段201とを結ぶ直線上およびその近傍の物体による反射だけに相関があう。監視エリアWA外の非常に遠方の電波反射は遅延時間が多いため、相関演算で相関が無くなる。すなわち、監視エリア外WAの物体を誤認識しなくてすむ効果がある。
【0037】
前記複素相関値は前記第1の侵入判別出力手段108に入力される。前記第1の侵入判別出力手段108は、前記第1のしきい値レジスタ107に予め設定されたしきい値と“相関値Iの二乗+相関値Qの二乗の平方根”とを比較し、“相関値Iの二乗+相関値Qの二乗の平方根”が第1のしきい値を上回っている場合、警報信号でもある第1の侵入出力(以下、“第1の警報信号”と記す)を前記メモリ109に出力する。
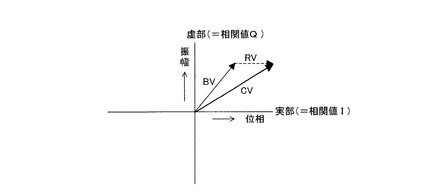
なお、前記“相関値Iの二乗+相関値Qの二乗の平方根”とは、図4に例示してあるように、“前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく複素平面上の基本ベクトルBVと、前記電波受信手段が、前記侵入物体から反射された電波を受信して出力した受信信号に基づく複素平面上の反射波ベクトルRVと、を合成して得られた複素平面上の合成ベクトルCV”を意味する。以後、この複素平面上の合成ベクトルCVの値は“複素相関合成値”と記す。
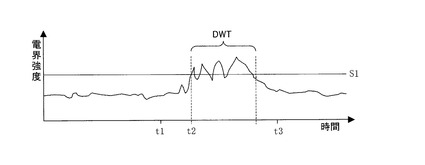
なお、前記合成ベクトルCV“複素相関合成値”の検知対の侵入物体300の監視エリアWAへの侵入に伴う変化を、縦軸に電界強度、横軸に経過時間をとってグラフ化すれば図5のようになり、前記侵入物体識別センサ装置100が前記侵入物体300を検知してから前記侵入物体識別センサ装置100が前記侵入物体300を検知しなくなるまでの間DWTは、従来とは逆に電界強度が大きくなる。
【0038】
前記メモリ109は前記第1の警報信号を受けると、前記複素相関値を所定時間、例えば2秒程度、蓄積を継続する。蓄積が完了すると蓄積した前記複素相関値から、例えば第1の警報信号が発生した時点を基準に前後2秒程度の所定時間分の蓄積複素相関値を前記演算器110に送る。
【0039】
前記演算器110は、送られてきた蓄積複素相関値の波形パターンを解析し、波形パターンの特徴情報を、前記判定器112に出力する。
【0040】
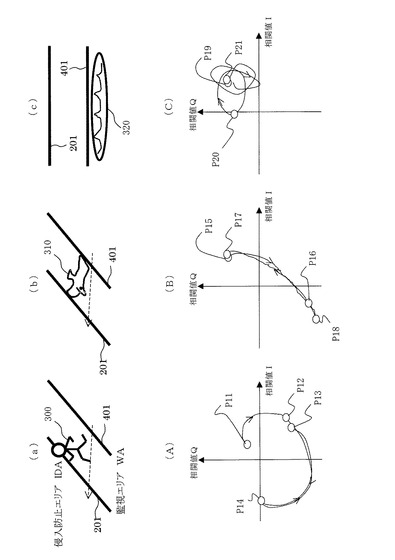
ここで、前記波形パターン(蓄積複素相関値の時間変化パターン、つまり合成ベクトルの軌跡(時間の経過に伴って変化する合成ベクトルの軌跡)のパターン)を図2により説明する。
【0041】
図2において、(A)は侵入物体が本来検出したい侵入者(人)等のいわゆる前記検出対象の侵入物体300である場合の当該侵入物体の侵入による前記波形パターンの例、(B)は侵入物体が本来検出不要な前記鳥310である場合の当該鳥の通過による波形パターンの例、(C)は地面が濡れ、水溜り320の水面が風等により変動したときの波形パターンの例である。
【0042】
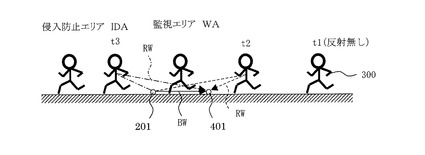
図2(A)において、点P12は、前記第1の警報信号が発生した時点t2の前記複素相関合成値である。同様に、点P11は、前記時点t2から所定時間、例えば2秒、前の時点t1の前記複素相関合成値である。同様に、点P13は、前記時点t2から所定時間、例えば2秒、後の蓄積が完了した時点の前記複素相関合成値である。
このように、侵入物体が本来検出したい侵入者(人)等のいわゆる検出対象の侵入物体300である場合には、前記複素相関合成値は、前記点P11から時計回りにらせん状に変化し、前記点P12を通過して、点P14で折り返して前記点P13に至る。
なお、前記複素相関合成値が、前記検出対象の侵入物体の移動に伴って前記点P14で折り返す現象は、例えば図3に例示してあるように、前記検出対象の侵入物体300が、侵入防止エリアIDA外から、監視エリアWAを横切って通過し侵入防止エリアIDA内に侵入した場合、前記検出対象の侵入物体300からの反射して受信用漏洩同軸ケーブルからなる電波受信手段401に受信される反射波の位相が、前記監視エリアWAの通過前と通過後とで、逆位相となるからである。
【0043】
図2(B)において、点P16は、前記第1の警報信号が発生した時点の複素相関合成値で、点P15はその時点から2秒前の点、点P17は2秒後の蓄積が完了した点の複素相関合成値である。
このように、鳥310の通過よって前記複素相関合成値は点P15から急激に変化し、点P16を通過して、点P18で折り返して点P17に至る。
【0044】
図2(C)において、点P20は、前記第1の警報信号が発生した時点の前記複素相関合成値で、点P19はその時点から2秒前の点、点P21は2秒後の蓄積が完了した点の前記複素相関合成値である。
このように、水溜り320の水面の変動よって前記複素相関合成値は点P19からランダムに変化する。
【0045】
このように、監視エリアWAを通過する侵入物体の種類によって前記複素相関合成値(合成ベクトル)の変化のパターンが異なる。これは、侵入物体のサイズ、材質、比誘電率、導電率、通過経路や状態の変化、等に依存して異なる。
【0046】
このような各種の進入物体に対応した各種の前記波形パターンの中から、検知対象の侵入物体に対応した波形パターンを判別するパターン解析の手法には、例えばらせん関数の関数フィッテング手法を使用する。本来検知したい前記検出対象の侵入物体300が監視エリアWAに侵入すると、前記蓄積複素相関値を使った前記複素相関合成値の時間的変化のパターンの特徴としてらせん回転するためである。従って、例えば、前記複素相関合成値の時間的変化のパターンのらせん曲率をパターンマッチング指標とし前記判定器112に出力することで、前記判定器112で本来検知したい前記検出対象の侵入物体300の識別が可能となる。
【0047】
他に、パターンマッチング指標として、学習アルゴリズムを用いることもできる。これも、らせん回転を認識する目的で動作させるものであるが、k−NN法での最近傍学習点の識別番号(例えば、侵入物体=1、鳥=0)などを指標に用いることもできる。
【0048】
図2中の点P14でパターンが折り返すが、これは本来検知したい検知対象の侵入物体300を識別する特徴的な指標である。図2(C)の水面の変動でも場合によってらせん回転に非常に近い場合が生じる可能性がある。しかし、らせんの円軌道が第1の警報信号が発生した後もしばらく続き、折り返す挙動も含めて侵入物体を判定すれば大幅に誤報を低減できる。この折返し点も含めた判別は前記関数フィッティングの手法よりも前記学習アルゴリズムの手法を用いる方が効果的に判別できる。
【0049】
この折返し点は、通常の検知(この場合、第1の警報信号が発生)後に現れる侵入時の特徴的な現象であり、この折返し点を観測し、それを本来検知したい前記検出対象の侵入物体300侵入物体の判別材料に用いることで的確な侵入判別を行うことができる。
【0050】
前記判定器112は、前記第2のしきい値レジスタ111に予め設定されたしきい値で、パターンマッチング指標を判定し、しきい値の範囲に変化加速度があれば、警報器500に警報信号を出力する。
【0051】
警報器500は警報信号受けると警報を発令する。
【0052】
本実施形態の特徴は、パターン解析に前記第1の警報信号が発生した時点より後の情報をも用いて行う点にある。例えば、図2(A)の前記点P12は前記第1の警報信号が発生した時点の点であるが、この時点で前期パターン解析をすると、前記点P11から前記点P12までの情報しかなく、これは、図2(B)と区別ができない場合がある。
【0053】
すなわち、本実施形態によれば、前記第1の警報信号が発生した時点より後の情報も合わせて所定時間蓄積された前記複素相関合成値から、前記侵入物体の進入による所定時間にわたる前記複素相関合成値の変化パターンの解析を行うことで、鳥などの小さな飛来物(小動物)による誤報や水面の変動等の環境変動による誤報をなくし、的確に、本来検出したい検知対象の侵入物体を検知できる。
【0054】
実施の形態2.
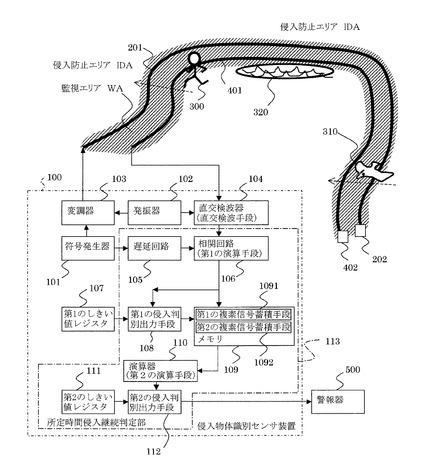
以下、本実施の形態2を、図6により説明する。図6は侵入物体識別方法を実行する侵入物体識別装置のシステム構成の一例および当該侵入物体識別装置における侵入物体識別センサ装置の内部構成の他の例を例示する図である。
【0055】
漏洩同軸ケーブル長手方向の全場所で検知する必要があるため、本実施の形態2は、複数のポイントを同時に観測するため、遅延回路と相関回路およびそれ以降の回路を複数搭載し、複数地点同時観測を行うようにした事例、つまり、破線で囲んだ所定時間侵入継続判定手段113を、複数113,113−2,・・・113−n設けた事例である。
【0056】
判定器112が侵入物体と判定したとき、その判定器の列番号から漏洩同軸ケーブル長手方向の侵入物体の距離が分かる。そのため、その列番号を距離に変換し、距離情報を警報機500に伝送することで、警報機500は侵入の有無とその位置を出力できる。
【0057】
ここで、侵入物体が漏洩同軸ケーブル長手方向に移動した場合を考える。ことのき、複数の所定時間侵入継続判定手段113,113−2,・・・113−nの各判定器112はいつも同じ判定を下すとは限らない。よって、各判定器112の時間的に連続する判定出力を、多数決判定手段114により多数決判定し、より確かな判定結果を出力する。
【0058】
例えば、所定時間侵入継続判定回路回路113を3台搭載したとし、1番目の所定時間侵入継続判定回路回路113の判定器112と、2番目の所定時間侵入継続判定回路回路113−2の判定器112と、3番目の所定時間侵入継続判定回路回路113−nの判定器112が、侵入物体300の移動に伴って、侵入→侵入→侵入と3回侵入物体を判定した後、続いて、鳥(小動物)310と判定出力があった場合は、侵入:小動物=3:1となり、侵入と判定する。
【0059】
このように、漏洩同軸ケーブルからなる電波送信手段201、電波受信手段401を用いる場合は、判定結果が途中で異なる場合もあるが、多数決判定によって誤認識を回避できる。
【0060】
以上のように、本実施の形態2によれば、検知対象の侵入物体の侵入の有無とその位置を的確に出力できると共に、多数決判定によって更に誤認識を回避して更に的確な侵入検知ができる。
【0061】
実施の形態3.
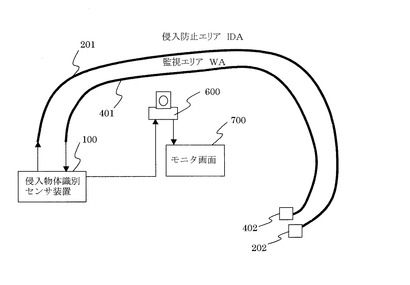
以下、本実施の形態3を、図7により説明する。図7は侵入物体識別装置のシステム構成の他の例を概念的に例示する図である。
【0062】
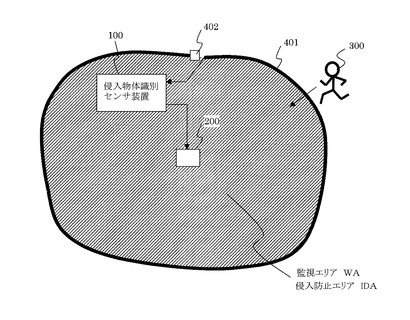
本実施の形態3は、図7に例示してあるように、受信には受信漏洩同軸ケーブル401を用い、送信には漏洩同軸ケーブルではないが漏洩同軸ケーブルと等価な例えばアレイアンテナ等の、電波を平面的に例えば360度放射可能な通常の送信アンテナ200を設けた事例を概念的に例示するものである。
【0063】
受信漏洩同軸ケーブル401を円形に配設し、送信アンテナ200を円の中央に配置する。このようすることで、監視エリアは面状になる。また、実施の形態2で説明したように、複数のポイントを同時に観測できるようにすれば、円のどこから侵入したかを判定することができる。
【0064】
尚、送受のアンテナを入れ替え、送信に漏洩同軸ケーブルを、受信に通常のアンテナを用いても同様の効果が得られる。
【0065】
このように実施の形態3では、電波送信手段及び電波受信手段の片方を漏洩同軸ケーブルとすることで、面状のエリア監視が可能となる。
【0066】
実施の形態4.
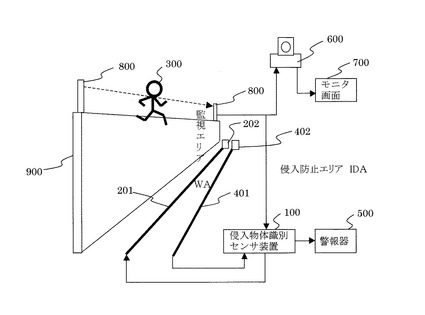
以下、本実施の形態4を、図8により説明する。図8は侵入物体識別装置のシステム構成の更に他の例を概念的に例示する図である。
【0067】
本実施形態では、前記第1の警報信号を、図8に例示してあるように、前記侵入物体識別センサ装置100の外部に出力し、この信号に基づいて監視カメラ600の回転角度やズームを調整制御するものである。
【0068】
実施の形態2で説明したように、複数のポイントを同時に観測できるようにすれば、第1の警報信号で位置情報も送れるため、前記監視カメラ600を監視エリアWAの侵入物体にピンポイントに向け、前記監視カメラ600の撮影画像をモニタ画面700に表示することができる。
【0069】
その後、実施の形態1で説明したように、前記波形パターンを解析して検知対象の侵入物体300を検知したときに前記警報機500が警報を鳴らす。
【0070】
監視カメラ600は回転に時間がかかるため、前記警報機500が作動してから回転させていたのでは時間遅延が発生し検知対象の侵入物体300が高速に移動する場合、当該検知対象の侵入物体300を捉えきれない恐れがある。そのため、前記第1の警報信号で前記監視カメラ600だけ検知対象の侵入物体300に照準を合わせ、前記侵入物体識別センサ装置100により侵入物体と判定されたときに警報を鳴らす。このようにすることで、監視員は前記警報機500による警報時のみ前記モニタ画面700をみればよく、監視の質向上に繋がる。
【0071】
このように、実施の形態4では反応に時間のかかる監視カメラ500を、前記侵入物体識別センサ装置100による検出対象の侵入物体の識別あるいは前記警報機500の作動より先に駆動させるため、警報が発生した時点で検出対象の侵入物体を的確に確認できる。
【0072】
実施の形態5.
以下、本実施の形態5を、図9により説明する。図9は侵入物体識別装置のシステム構成の更に他の例を概念的に例示する図である。
【0073】
本実施の形態5は、第1の警報信号を、前記侵入物体識別センサ装置100以外の他のセンサから得ることを特徴とするものである。
【0074】
本実施の形態5では、図9に例示してあるように、光学センサ等の第1段階の侵入検知装置800を、前記侵入防止エリアIDAの前記電波送信手段201及び前記電波受信手段401より外側に前記侵入防止エリアIDAの外縁に沿って設置し、当該第1段階の侵入検知装置800は、侵入を感知すると前記第1の警報信号相当の信号を前記侵入物体識別センサ装置100に送る。
【0075】
前記侵入物体識別センサ装置100では、前記第1段階の侵入検知装置800からの第1の警報信号(第1の侵入出力信号)は、実施例1〜3と同様にメモリ109に接続され、以後、前記侵入物体識別センサ装置100が、実施の形態1〜3で説明したように、動作する。
【0076】
なお、前記第1段階の侵入検知装置800は、例えば、赤外線、レーザ等の光学センサ等を利用した周知の侵入検知装置を使用することで足りる。
【0077】
前記第1段階の侵入検知装置800は、例えば、フェンスや塀900の上部に設置する。
【0078】
侵入物体300の侵入がある場合、まず、この前記第1段階の侵入検知装置800で侵入物体300を捉える。その後、漏洩同軸ケーブルからなる前記電波送信手段201及び前記電波受信手段を介して前記侵入物体識別センサ装置100によって侵入物体300の反射信号が捕らえられ、実施例1〜3で説明したように前記波形パターン認識によって、本来検知したい検知対象の侵入物体300と判定されると、前記侵入物体識別センサ装置100から警報信号が前記警報器500に送られ前記警報器500の警報が鳴る。
【0079】
鳥や猫などの小動物が塀900上を進んで、その結果、仮に前記第1段階の侵入検知装置800が作動して前記第1の警報信号(第1の侵入出力信号)が前記侵入物体識別センサ装置100に上がったとしても、鳥や猫などの小動物が前記塀900の上であることから、漏洩同軸ケーブルからなる前記電波送信手段201及び前記電波受信手段の電波への影響はなく、前記侵入物体識別センサ装置100が侵入物体を検知しないため、前記警報器500は、不要な警報を鳴らない。
【0080】
また、鳥などの小動物が、漏洩同軸ケーブルからなる前記電波送信手段201及び前記電波受信手段401の電波に影響する範囲内に入ったとしても、そのときは前記第1段階の侵入検知装置800が不作動であり、前記第1の警報信号(第1の侵入出力信号)は前記侵入物体識別センサ装置100に入ってないため、前記警報器500から不要な警報は鳴らない。なお、この場合でも鳥などの侵入は、前記侵入物体識別センサ装置100における前記パターン認識で、検知対象の侵入物体300の侵入とは認定されない。
【0081】
更に、実施の形態1〜3では、通行物体のある道路際に漏洩同軸ケーブルからなる前記電波送信手段201及び前記電波受信手段401を敷設すると、通行者の反射信号を前記電波受信手段401が受信し、不要な警報を発令する恐れがあるが、光センサなどの前記第1段階の侵入検知装置800で第1の警報信号(第1の侵入出力信号)を上げれるので、不要な警報を発生しない。また、光センサだけでは木の葉や小動物で警報がでるが、電波との組合せにより侵入の識別を行うので不要な警報がない。
【0082】
尚、前記他のセンサである前記第1段階の侵入検知装置800が発生する警報信号で監視カメラを回すようにすることで、実施の形態4で説明した効果も付加できる。
【0083】
このように実施の形態5では、電波以外の光センサなどの前記第1段階の侵入検知装置800で第1の警報(第1の侵入出力信号)を上げ、第2段階で電波による監視を行うため、誤報の低減が図れ、道路脇など電波だけでは誤報が発生する恐れがあるところにも設置が可能である。
【0084】
前述の各実施の形態は、それぞれの利点を活かすために、適宜組み合わせた、侵入物体識別方法、侵入物体識別装置、及び侵入物体識別センサ装置としてもよい。
【0085】
なお、各図中、同一符合は同一または相当部分を示す。
【0086】
前述の実施の形態1〜5は前述した通りであり、従って、本願の技術的特徴点は、他の観点からの技術的特徴点も含め、以下の通りである。
【0087】
特徴点1.
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段とこの電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別方法である。
【0088】
特徴点2.
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段とこの電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別方法である。
【0089】
特徴点3.
特徴点1又は特徴点2に記載の侵入物体識別方法において、前記侵入物体侵入状態情報が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく基本ベクトルと、前記電波受信手段が前記侵入物体から反射された電波を受信して出力した受信信号に基づく反射波ベクトルと、を合成して得られた合成ベクトルの情報であり、この合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別方法である。
【0090】
特徴点4.
特徴点3に記載の侵入物体識別方法において、前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別することを特徴とする侵入物体識別方法である。
【0091】
特徴点5.
特徴点3に記載の侵入物体識別方法において、前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別することを特徴とする侵入物体識別方法である。
【0092】
特徴点6.
特徴点1又は特徴点2に記載の侵入物体識別方法において、前記侵入物体の検知に基づき、前記検知対象の侵入物体の識別より前に監視カメラの回転監視モードでの制御が行われることを特徴とする侵入物体識別方法である。
【0093】
特徴点7.
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0094】
特徴点8.
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置を備え、前記第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0095】
特徴点9.
特徴点7又は特徴点8に記載の侵入物体識別装置において、前記侵入物体侵入状態情報が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく基本ベクトルと、前記電波受信手段が前記侵入物体から反射された電波を受信して出力した受信信号に基づく反射波ベクトルと、を合成して得られた合成ベクトルの情報であり、この合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0096】
特徴点10.
特徴点9に記載の侵入物体識別装置において、前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0097】
特徴点11.
特徴点9に記載の侵入物体識別装置において、前記合成ベクトルの変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0098】
特徴点12.
特徴点7又は特徴点8に記載の侵入物体識別装置において、前記侵入物体の検知に基づき、前記検知対象の侵入物体の識別より前に監視カメラの回転監視モードでの制御が行われることを特徴とする侵入物体識別装置である。
【0099】
特徴点13.
少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段、受信信号を送信から受信までの伝搬時間だけ遅延した複素受信信号を抽出する直交検波手段、前記複素受信信号を距離毎に蓄積する第1の複素信号蓄積手段、前記第1の複素信号蓄積手段に蓄積された現時点から所定の過去時間までの前記複素受信信号を使って、所定の第1の複素演算によって侵入物体の侵入状態値を出力する第1の演算手段、この第1の演算手段が演算した前記侵入状態値が、予め設定した所定のしきい値を超えていた場合に第1の侵入出力を出す第1の侵入判別出力手段、前記第1の侵入出力が出されるとその後の前記複素受信信号を所定の時間だけ蓄積する第2の複素信号蓄積手段、前記第2の複素信号蓄積手段が蓄積した複素受信信号を使って、所定の第2の複素演算によって前記侵入物体の移動状態の出力を出す第2の演算手段、及びこの第2の演算手段の前記移動状態の出力から検知対象の侵入物体の侵入を判別し、前記検知対象の侵入物体が侵入したこと及びその侵入地点の距離を出力する第2の侵入判別出力手段を備えた侵入物体識別装置である。
【0100】
特徴点14.
特徴点13に記載の侵入物体識別装置において、前記侵入物体の移動状態の出力が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく複素平面上の基本ベクトルと、前記電波受信手段が、前記侵入物体から反射された電波を受信して出力した受信信号に基づく複素平面上の反射波ベクトルと、を合成して得られた複素平面上の合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0101】
特徴点15.
特徴点14に記載の侵入物体識別装置において、前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0102】
特徴点16.
特徴点14に記載の侵入物体識別装置において、前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0103】
特徴点17.
特徴点13に記載の侵入物体識別装置において、前記第1及び第2の複素信号蓄積手段、前記第1及び第2の演算手段、及び前記第1及び第2の侵入判別出力手段で構成された所定時間侵入継続判定部が複数設けられ、これら複数の所定時間侵入継続判定部のそれぞれが前記検知対象の侵入物体の侵入を判別することを特徴とする侵入物体識別装置である。
【0104】
特徴点18.
特徴点17に記載の侵入物体識別装置において、前記複数の所定時間侵入継続判定部のそれぞれの前記第2の演算手段の前記移動状態の出力から検知対象の侵入物体の侵入を、多数決判定手段により多数決で判定することを特徴とする侵入物体識別装置である。
【0105】
特徴点19.
特徴点13に記載の侵入物体識別装置において、前記第1の演算手段の出力に基づき、前記第2の侵入判別手段による前記検知対象の侵入物体の侵入の判別より前に、監視カメラの回転監視モードでの制御が行われることを特徴とする侵入物体識別装置である。
【0106】
特徴点20.
少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段のうちの前記電波送信手段が放射した電波を受信し受信信号を出力する電波受信手段の受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置において、前記侵入物体の検知から前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する所定時間侵入継続判定部を備えていることを特徴とする侵入物体識別センサ装置である。
【0107】
特徴点21.
特徴点20に記載の侵入物体識別センサ装置において、前記侵入物体侵入状態情報が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく基本ベクトルと、前記電波受信手段が前記侵入物体から反射された電波を受信して出力した受信信号に基づく反射波ベクトルと、を合成して得られた合成ベクトルの情報であり、この合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別センサ装置である。
【0108】
特徴点22.
特徴点21に記載の侵入物体識別センサ装置において、前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別することを特徴とする侵入物体識別センサ装置である。
【0109】
特徴点23.
特徴点21に記載の侵入物体識別センサ装置において、前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別センサ装置である。
【0110】
特徴点24.
検知電波を送信する電波送信手段と、検知電波を受信し受信信号を出力する電波受信手段と、受信信号を送信から受信までの伝搬時間だけ遅延した複素受信信号を抽出する直交検波相関手段と、前記複素受信信号を蓄積する各距離で番号付けされた複素信号蓄積手段(第1の複素信号蓄積手段)と、蓄積された現時点から所定の過去時間までの複素受信信号を使って、所定の複素演算によって第1の状態数値を出力する第1の演算手段と、前記第1の状態数値を予め設定した所定のしきい値で判定し、しきい値を超えていた場合に第1の警報を出力する第1の警報手段と、前記第1の警報を出力された後で、前記複素受信信号を所定の時間だけ更に蓄積する追加複素信号蓄積手段(第2の複素信号蓄積手段)と、前記追加複素信号蓄積手段(第2の複素信号蓄積手段)が蓄積した複素受信信号と、前記複素信号蓄積手段(第1の複素信号蓄積手段)が蓄積した複素受信信号とを合わせて、所定の第2の複素演算によって第2の状態数値を出力する第2の演算手段と、前記第2の状態数値を予め設定した所定の第2のしきい値で判定し、この第2のしきい値を超えていた場合に最終の警報(第2の警報)と距離とを出力する最終警報手段(第2の警報手段)とを備えた侵入物体識別装置である。
【0111】
特徴点25.
特徴点24に記載の侵入物体識別装置において、前記電波送信手段、前記電波受信手段の両方若しくは片方が漏洩同軸ケーブルであることを特徴とする侵入物体識別装置である。
【0112】
特徴点26.
特徴点24又は特徴点25に記載の侵入物体識別装置において、追加複素信号蓄積手(第2の複素信号蓄積手段)が蓄積した複素受信信号から、波形パターンの折返しパターンを抽出し、その度合いを出力する第2の演算手段を備えていることを特徴とする侵入物体識別装置である。
【0113】
特徴点27.
特徴点24又は特徴点25に記載の侵入物体識別装置において、前記第2の演算手段が、前記パターン抽出にらせん波形のフィッティング状態を前記第2の状態数値として出力するを特徴とする侵入物体識別装置である。
【0114】
特徴点28.
特徴点25に記載の侵入物体識別装置において、複数の並列的に動作する前記直交検波相関手段、前記複素信号蓄積手段(第1の複素信号蓄積手段)、前記第1の演算手段、前記第1の警報手段、前記追加複素信号蓄積手段(第2の複素信号蓄積手段)、前記第2の演算手段を有することを特徴とする侵入物体識別装置である。
【0115】
特徴点29.
特徴点28に記載の侵入物体識別装置において、前記複数の第2の演算手段の出力を多数決判定する多数決判定手段を備えていることを特徴とする侵入物体識別装置である。
【0116】
特徴点30.
特徴点24又は特徴点25に記載の侵入物体識別装置において、前記第1の警報手段の出力をカメラ制御手段に送り、前記最終警報手段(第2の警報手段)が警報を出力するまえに、侵入物体をカメラで捕らえるように制御することを特徴とする侵入物体識別装置である。
【0117】
特徴点31.
検知電波を送信する電波送信手段と、検知電波を受信し受信信号を出力する電波受信手段と、受信信号を送信から受信までの伝搬時間だけ遅延した複素受信信号を抽出する直交検波相関手段と、前記複素受信信号を蓄積する各距離で番号付けされた複素信号蓄積手段と、各距離の複素受信信号を蓄積する複素信号蓄積手段と、外部機器から第1の警報を受けると、前記複素受信信号を所定の時間だけ更に蓄積する追加複素信号蓄積手段と、前記追加複素信号蓄積手が蓄積した複素受信信号と、前記複素信号蓄積手段が蓄積した複素受信信号とを合わせて、所定の第2の複素演算によって第2の状態数値を出力する第2演算手段と、前記第2の状態数値を予め設定した所定の第2のしきい値で判定し、この第2のしきい値を超えていた場合に最終の警報と距離とを出力する最終警報手段とを備えた侵入物体識別装置である。
【0118】
特徴点32.
特徴点31に記載した侵入物体識別装置であって、前記電波送信手段、前記電波受信手段の両方若しくは片方が漏洩同軸ケーブルであることを特徴とする侵入物体識別装置である。
【0119】
特徴点33.
特徴点31又は特徴点32に記載の侵入物体識別装置において、前記追加複素信号蓄積手段が蓄積した複素受信信号から、波形パターンの折返しパターンを抽出し、その度合いを出力する第2の演算手段を備えていることを特徴とする侵入物体識別装置である。
【0120】
特徴点34.
特徴点31又は特徴点32に記載の侵入物体識別装置において、前記第2の演算手段が、前記パターン抽出にらせん波形のフィッティング状態を前記第2の状態数値として出力することを特徴とする侵入物体識別装置である。
【0121】
特徴点35.
特徴点32に記載の侵入物体識別装置において、複数の並列的に動作する前記直交検波相関手段、前記複素信号蓄積手段、前記演算手段、前記第1の警報手段、前記追加複素信号蓄積手段、前記第2の演算手段を有することを特徴とする侵入物体識別装置である。
【0122】
特徴点36.
特徴点35に記載の侵入物体識別装置であって、前記複数の第2の演算手段の出力を多数決判定する多数決判定手段を備えていることを特徴とする侵入物体識別装置である。
【0123】
特徴点37.
特徴点31又は特徴点32に記載の侵入物体識別装置において、外部機器からの第1の警報をカメラ制御手段に送り、最終警報手段が警報を出力する前に、侵入物体を捕らえるように制御することを特徴とする侵入物体識別装置である。
【図面の簡単な説明】
【0124】
【図1】この発明の実施の形態1を示す図で、侵入物体識別方法を実行する侵入物体識別装置のシステム構成の一例および当該侵入物体識別装置における侵入物体識別センサ装置の内部構成の一例を例示する図である。
【図2】この発明の実施の形態1を示す図で、侵入物体毎の受信信号における基本波(侵入物体に遮られずに送信用漏洩同軸ケーブルから受信用漏洩同軸ケーブルに直接受信される電波)のベクトルである基本ベクトルと、侵入物体から反射して受信用漏洩同軸ケーブルに受信される反射波のベクトルである反射波ベクトルとの合成ベクトルの、侵入物体侵入状態の経時変化に伴う軌跡(ベクトル軌跡)を例示する図で、(a)は侵入物体が人の場合の侵入形態の事例、(A)は侵入物体が人の場合に対応するベクトル軌跡の実測事例、(b)は侵入物体が鳥の場合の侵入形態の事例、(B)は侵入物体が鳥の場合に対応するベクトル軌跡の実測事例、(c)は侵入物体が漏洩同軸ケーブルのそばにできた水溜り(漏洩同軸ケーブルに物理的には侵入はしないが、水溜りからの反射波が受信信号に影響することから等価的侵入物体である)の場合の侵入形態の事例、(C)は侵入物体が水溜り場合に対応するベクトル軌跡の実測事例、をそれぞれ例示してある。
【図3】この発明の実施の形態1を示す図で、検知対象の侵入物体(人)等の侵入過程と、基本波(侵入物体に遮られずに送信用漏洩同軸ケーブルから受信用漏洩同軸ケーブルに直接受信される電波)および侵入物体から反射して受信用漏洩同軸ケーブルに受信される反射波との関係の説明図である。
【図4】この発明の実施の形態1を示す図で、基本ベクトルと反射波ベクトルと合成ベクトルとを複素平面で例示した図である。
【図5】この発明の実施の形態1を示す図で、合成ベクトルの変化の状態を、縦軸を電界強度、横軸を時間(経過時間)として例示する図である。
【図6】この発明の実施の形態2を示す図で、侵入物体識別方法を実行する侵入物体識別装置のシステム構成の一例および当該侵入物体識別装置における侵入物体識別センサ装置の内部構成の他の例を例示する図である。
【図7】この発明の実施の形態3を示す図で、侵入物体識別装置のシステム構成の他の例を概念的に例示する図である。
【図8】この発明の実施の形態4を示す図で、侵入物体識別装置のシステム構成の更に他の例を概念的に例示する図である。
【図9】この発明の実施の形態5を示す図で、侵入物体識別装置のシステム構成の更に他の例を概念的に例示する図である。
【符号の説明】
【0125】
P11 時点t2から所定時間、例えば2秒、前の時点t1の前記複素相関合成値、
P12 第1の警報信号が発生した時点t2の前記複素相関合成値、
P13 時点t2から所定時間、例えば2秒、後の蓄積が完了した時点の前記複素相関合成値、
P14 折り返し点の複素相関合成値、
P15 点P16から2秒前の点の複素相関合成値、
P16 第1の警報信号が発生した時点の複素相関合成値、
P17 2秒後の蓄積が完了した点の複素相関合成値、
P18 折り返して点の複素相関合成値、
P19 P20から2秒前の点、
P20 第1の警報信号が発生した時点の複素相関合成値、
P21 2秒後の蓄積が完了した点の複素相関合成値、
100 侵入物体識別センサ装置、
101 符号発生器、
102 発振器、
103 変調器、
104 直交検波器(直交検波手段)、
105 遅延回路、
106 相関回路(第1の演算手段)、
107 第1のしきい値レジスタ、
108 第1の侵入判別出力手段、
109 メモリ、
1091 第1の複素信号蓄積手段、
1092 第2の複素信号蓄積手段、
110 演算器(第2の演算手段)、
111 第2のしきい値レジスタ、
112 第2の侵入判別出力手段、
113 所定時間侵入継続判定部、
113−1 所定時間侵入継続判定部、
113−n 所定時間侵入継続判定部、
114 多数決判定手段、
200 送信アンテナ、
201 送信漏洩同軸ケーブル(電波送信手段)、
202 終端器、
300 侵入物体、
310 鳥、
320 地面が濡れ、
401 受信漏洩同軸ケーブル(電波受信手段)、
402 終端器、
500 警報器、
600 監視カメラ、
700 モニタ画面、
800 第1段階の侵入検知装置(光学センサ)、
900 フェンスや塀、
IDA 侵入防止エリア、
WA 監視エリア。
【技術分野】
【0001】
この発明は、侵入物体の侵入を監視したい領域や境界に漏洩同軸ケーブルを配置し、その漏洩同軸ケーブルに接近し、横切り、通過して侵入防止エリアに侵入する検知対象の侵入物体の識別を電波で行う侵入物体識別方法、侵入物体識別装置、及び侵入物体識別センサ装置に関するものである。
【背景技術】
【0002】
侵入物体の侵入を監視したい領域や境界に漏洩同軸ケーブルを配置しその漏洩同軸ケーブルを横切って侵入防止エリアに侵入する侵入物体を検知する従来の侵入検知装置においては、送信用漏洩同軸ケーブルから電波を放射した電波を受信用漏洩同軸ケーブルで受信し、この受信信号のレベルを監視する。上記漏洩同軸ケーブル間に物体が侵入すると電波が遮断され受信信号のレベルが低下するので、受信信号のレベルを所定のしきい値で常時判定しており、受信信号のレベルがそのしきい値を下回ったとき、「侵入物体あり」と判定して警報を出力する構成である。(例えば、特許第3703689号公報、特開平10−95338号公報を参照。)
【0003】
【特許文献1】特許第3703689号公報(図1及びその説明)
【特許文献2】特開平10−95338号公報(図3、図4及びその説明)
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来の漏洩同軸ケーブルを用いた侵入物体検知装置は、受信信号のレベルの低下をしきい値判定しているだけであるため、本来検出したくない鳥等の小さな飛来物や犬猫等の小動物、漏洩同軸ケーブルを林内に敷設した場合における木々の葉からの風により纏まって落ちてくる水滴が漏洩同軸ケーブルに接触した場合等、受信用漏洩同軸ケーブルが受信した受信信号の受信レベルは低下する。
小動物であっても漏洩同軸ケーブルに近ければ受信信号の変化量は大きくなるため、受信信号のレベルが低下し「侵入者あり」の誤報を出力する課題があった。
また、降雨によって漏洩同軸ケーブルそのものや、その周りの地面や壁や柱が濡れることで反射、透過係数が変化し、それによって受信信号のレベルが変化し「侵入者あり」の誤報を出力する課題があった。
更に、従来の侵入検知装置は、しきい値を下回った瞬間に「侵入者あり」の警報を出力するため、本来検出したくない小さな飛来物や小動物や水滴がアンテナである漏洩同軸ケーブルに接触した瞬間にレベルが低下し、この状態でしきい値判定を行って「侵入者あり」の誤報を出力する課題があった。
【0005】
この発明は前述のような実情に鑑みてなされたものであり、本来検知したくない小さな飛来物や小動物や水滴等の非検知対象の物体を認識せず、本来検知したい侵入者等、つまり検知対象の侵入物体を識別できるようにすることを目的とするものである。
【課題を解決するための手段】
【0006】
この発明に係る侵入物体識別方法は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段とこの電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別するものである。
【0007】
また、この発明に係る侵入物体識別方法は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段とこの電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別するものである。
【0008】
また、この発明に係る侵入物体識別装置は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別するものである。
【0009】
また、この発明に係る侵入物体識別装置は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置を備え、前記第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別するものである。
【0010】
また、この発明に係る侵入物体識別装置は、少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段、受信信号を送信から受信までの伝搬時間だけ遅延した複素受信信号を抽出する直交検波手段、前記複素受信信号を距離毎に蓄積する第1の複素信号蓄積手段、前記第1の複素信号蓄積手段に蓄積された現時点から所定の過去時間までの前記複素受信信号を使って、所定の第1の複素演算によって侵入物体の侵入状態値を出力する第1の演算手段、この第1の演算手段が演算した前記侵入状態値が、予め設定した所定のしきい値を超えていた場合に第1の侵入出力を出す第1の侵入判別出力手段、前記第1の侵入出力が出されるとその後の前記複素受信信号を所定の時間だけ蓄積する第2の複素信号蓄積手段、前記第2の複素信号蓄積手段が蓄積した複素受信信号を使って、所定の第2の複素演算によって前記侵入物体の移動状態の出力を出す第2の演算手段、及びこの第2の演算手段の前記移動状態の出力から検知対象の侵入物体の侵入を判別し、前記検知対象の侵入物体が侵入したこと及びその侵入地点の距離を出力する第2の侵入判別出力手段を備えたものである。
【0011】
また、この発明に係る侵入物体識別センサ装置は、少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段のうちの前記電波送信手段が放射した電波を受信し受信信号を出力する電波受信手段の受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置において、前記侵入物体の検知から前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する所定時間侵入継続判定部を備えているものである。
【発明の効果】
【0012】
この発明は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段とこの電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別するので、本来検知したくない物体を認識せず、本来検知したい侵入者等、つまり検知対象の侵入物体を識別できる効果がある。
【0013】
また、この発明は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段とこの電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別するので、本来検知したくない物体を認識せず、本来検知したい侵入者等、つまり検知対象の侵入物体を識別できる効果がある。
【0014】
また、この発明は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別するので、本来検知したくない物体を認識せず、本来検知したい侵入者等、つまり検知対象の侵入物体を識別できる効果がある。
【0015】
また、この発明は、侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置を備え、前記第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別するので、本来検知したくない物体を認識せず、本来検知したい侵入者等、つまり検知対象の侵入物体を識別できる効果がある。
【0016】
この発明は、少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段、受信信号を送信から受信までの伝搬時間だけ遅延した複素受信信号を抽出する直交検波手段、前記複素受信信号を距離毎に蓄積する第1の複素信号蓄積手段、前記第1の複素信号蓄積手段に蓄積された現時点から所定の過去時間までの前記複素受信信号を使って、所定の第1の複素演算によって侵入物体の侵入状態値を出力する第1の演算手段、この第1の演算手段が演算した前記侵入状態値が、予め設定した所定のしきい値を超えていた場合に第1の侵入出力を出す第1の侵入判別出力手段、前記第1の侵入出力が出されるとその後の前記複素受信信号を所定の時間だけ蓄積する第2の複素信号蓄積手段、前記第2の複素信号蓄積手段が蓄積した複素受信信号を使って、所定の第2の複素演算によって前記侵入物体の移動状態の出力を出す第2の演算手段、及びこの第2の演算手段の前記移動状態の出力から検知対象の侵入物体の侵入を判別し、前記検知対象の侵入物体が侵入したこと及びその侵入地点の距離を出力する第2の侵入判別出力手段を備えているので、本来検知したくない物体を認識せず、本来検知したい侵入者等、つまり検知対象の侵入物体を識別できる効果がある。
【0017】
この発明は、少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段のうちの前記電波送信手段が放射した電波を受信し受信信号を出力する電波受信手段の受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置において、前記侵入物体の検知から前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する所定時間侵入継続判定部を備えているので、本来検知したくない物体を認識せず、本来検知したい侵入者等、つまり検知対象の侵入物体を識別できる効果がある。
【発明を実施するための最良の形態】
【0018】
実施の形態1.
以下この発明の実施の形態1を図1〜図5により説明する。図1は侵入物体識別方法を実行する侵入物体識別装置のシステム構成の一例および当該侵入物体識別装置における侵入物体識別センサ装置の内部構成の一例を例示する図、図2は侵入物体毎の受信信号における基本波(侵入物体に遮られずに送信用漏洩同軸ケーブルから受信用漏洩同軸ケーブルに直接受信される電波)のベクトルである基本ベクトルと、侵入物体から反射して受信用漏洩同軸ケーブルに受信される反射波のベクトルである反射波ベクトルとの合成ベクトルの、侵入物体侵入状態の経時変化に伴う軌跡(ベクトル軌跡)を例示する図で、(a)は侵入物体が人の場合の侵入形態の事例、(A)は侵入物体が人の場合に対応するベクトル軌跡の実測事例、(b)は侵入物体が鳥の場合の侵入形態の事例、(B)は侵入物体が鳥の場合に対応するベクトル軌跡の実測事例、(c)は侵入物体が漏洩同軸ケーブルのそばにできた水溜り(漏洩同軸ケーブルに物理的には侵入はしないが、水溜りからの反射波が受信信号に影響することから等価的侵入物体である)の場合の侵入形態の事例、(C)は侵入物体が水溜り場合に対応するベクトル軌跡の実測事例、をそれぞれ例示してある。図3は検知対象の侵入物体(人)等の侵入過程と、基本波(侵入物体に遮られずに送信用漏洩同軸ケーブルから受信用漏洩同軸ケーブルに直接受信される電波)および侵入物体から反射して受信用漏洩同軸ケーブルに受信される反射波との関係の説明図、図4は基本ベクトルと反射波ベクトルと合成ベクトルとを複素平面で例示した図、図5は合成ベクトルの変化の状態を、縦軸を電界強度、横軸を時間(経過時間)として例示する図である。
以下、この発明の実施の形態1を図1に基づいて説明する。
【0019】
本実施の形態1の侵入物体識別システムは、図1に例示するように、侵入物体識別センサ装置100、送信漏洩同軸ケーブル(電波送信手段)201、受信漏洩同軸ケーブル(電波受信手段)401、および警報器500で構成されている。なお、202は送信漏洩同軸ケーブル(電波送信手段)201の終端器、402は受信漏洩同軸ケーブル(電波受信手段)401の終端器である。
【0020】
前記侵入物体識別センサ装置100は、符号発生器101、発振器102、変調器103、直交検波器(直交検波手段) 104、遅延回路105、第1の演算手段でもある相関回路(以下、“相関回路”と記す)106、第1のしきい値レジスタ107、判定器からなる第1の侵入判別出力手段(以下、“判定器”と記す)108、メモリ109、第2の演算手段である演算器(以下、“演算器”と記す)110、第2のしきい値レジスタ111、および判定器からなる第2の侵入判別出力手段(以下、“判定器”と記す)112で構成されている。
【0021】
前記メモリ109は、第1の複素信号蓄積手段1091、および第2の複素信号蓄積手段1092を有している。
【0022】
前記遅延回路105、前記相関回路(第1の演算手段)106、前記第1の侵入判別出力手段108、前記メモリ109、前記演算器(第2の演算手段)110、第2のしきい値レジスタ111、および第2の侵入判別出力手段112は、所定時間侵入継続判定部113を構成している。
【0023】
図1において、前記侵入物体識別センサ装置100には、前記送信用漏洩同軸ケーブルからなる電波送信手段201と、前記受信用漏洩同軸ケーブルからなる電波受信手段401が接続されている。
【0024】
前記侵入物体識別センサ装置100が出力する送信信号は、前記送信用漏洩同軸ケーブルからなる電波送信手段201から、送信電波として放射される。
【0025】
前記送信用漏洩同軸ケーブルからなる電波送信手段201から放射された送信電波は、侵入防止(または禁止)エリアIDAに侵入するために監視エリアWA(漏洩同軸ケーブルからなる前記電波送信手段201と前記電波受信手段401との間およびその近傍)に近づいてくる本来検知したい侵入者(人)等のいわゆる前記検知対象の侵入物体300で反射し、その反射波が前記受信用漏洩同軸ケーブルからなる電波受信手段401で受信され、受信信号として前記侵入物体識別センサ装置100に入力される。
【0026】
一方、例えば本来検知する必要のない鳥310などの高速に監視エリアWAを通過する物体がある場合、この様に小動物(小物体)であっても前記漏洩同軸ケーブルからなる電波送信手段201、電波受信手段401に接近すれば観測される反射強度が強いため、この反射信号が前記送信用漏洩同軸ケーブルからなる電波受信手段401で受信される場合もある。
【0027】
また、降雨などによる監視エリアWAの地面の濡れ320によっても電波が反射され、この反射信号が前記受信用漏洩同軸ケーブルからなる電波受信手段401で受信される場合もある。
【0028】
侵入物体識別センサ装置100は、これらの各種の反射信号を特定の処理によって、本来検知する必要のある検知対象の侵入物体300を検知し警報器500を差動させる。
【0029】
この特定の処理を行う前記侵入物体識別センサ装置100の内部動作を、以下に、説明する。
【0030】
前記符号発生器101は、周知のPN符号等の擬似ランダム符号を発生させる装置である。
【0031】
前記変調器103は、前記符号発生器101が発生した符号信号によって前記発振器102が出力する搬送波を変調し、漏洩同軸ケーブルからなる前記電波送信手段201に出力する。
【0032】
漏洩同軸ケーブルからなる前記電波受信手段401が受信した受信信号は、周知の前記直交検波器104で、前記発振器102が出力する搬送波に基づいて直交検波される。前記直交検波器104は、直交検波によってI信号とQ信号を出力する。ここではI信号とQ信号をまとめて複素信号と呼ぶ。
【0033】
前記複素信号は、前記相関回路106に入力される。前記符号発生器101が発生した符合信号はフリップフロップ等で構成される前記遅延回路105で遅延し、その遅延符号信号が前記相関回路106に入力される。
【0034】
前記相関回路106は、前記遅延符号信号と前記複素信号との複素相関値を計算し出力する。前記複素相関値とは、I信号と遅延符号信号との相関値I、Q信号と遅延符号信号との相関値Qをまとめて呼んだものである。
【0035】
前記遅延回路105は、漏洩同軸ケーブルからなる前記電波送信手段201から放射されら送信電波が漏洩同軸ケーブルからなる前記電波送信手段401で直接受信され受信信号が直交検波され相関回路106に入力されるまでの伝搬遅延時間に相当する時間だけ遅延させる。
【0036】
このようにすることによって、漏洩同軸ケーブルからなる前記電波送信手段201と漏洩同軸ケーブルからなる前記電波受信手段201とを結ぶ直線上およびその近傍の物体による反射だけに相関があう。監視エリアWA外の非常に遠方の電波反射は遅延時間が多いため、相関演算で相関が無くなる。すなわち、監視エリア外WAの物体を誤認識しなくてすむ効果がある。
【0037】
前記複素相関値は前記第1の侵入判別出力手段108に入力される。前記第1の侵入判別出力手段108は、前記第1のしきい値レジスタ107に予め設定されたしきい値と“相関値Iの二乗+相関値Qの二乗の平方根”とを比較し、“相関値Iの二乗+相関値Qの二乗の平方根”が第1のしきい値を上回っている場合、警報信号でもある第1の侵入出力(以下、“第1の警報信号”と記す)を前記メモリ109に出力する。
なお、前記“相関値Iの二乗+相関値Qの二乗の平方根”とは、図4に例示してあるように、“前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく複素平面上の基本ベクトルBVと、前記電波受信手段が、前記侵入物体から反射された電波を受信して出力した受信信号に基づく複素平面上の反射波ベクトルRVと、を合成して得られた複素平面上の合成ベクトルCV”を意味する。以後、この複素平面上の合成ベクトルCVの値は“複素相関合成値”と記す。
なお、前記合成ベクトルCV“複素相関合成値”の検知対の侵入物体300の監視エリアWAへの侵入に伴う変化を、縦軸に電界強度、横軸に経過時間をとってグラフ化すれば図5のようになり、前記侵入物体識別センサ装置100が前記侵入物体300を検知してから前記侵入物体識別センサ装置100が前記侵入物体300を検知しなくなるまでの間DWTは、従来とは逆に電界強度が大きくなる。
【0038】
前記メモリ109は前記第1の警報信号を受けると、前記複素相関値を所定時間、例えば2秒程度、蓄積を継続する。蓄積が完了すると蓄積した前記複素相関値から、例えば第1の警報信号が発生した時点を基準に前後2秒程度の所定時間分の蓄積複素相関値を前記演算器110に送る。
【0039】
前記演算器110は、送られてきた蓄積複素相関値の波形パターンを解析し、波形パターンの特徴情報を、前記判定器112に出力する。
【0040】
ここで、前記波形パターン(蓄積複素相関値の時間変化パターン、つまり合成ベクトルの軌跡(時間の経過に伴って変化する合成ベクトルの軌跡)のパターン)を図2により説明する。
【0041】
図2において、(A)は侵入物体が本来検出したい侵入者(人)等のいわゆる前記検出対象の侵入物体300である場合の当該侵入物体の侵入による前記波形パターンの例、(B)は侵入物体が本来検出不要な前記鳥310である場合の当該鳥の通過による波形パターンの例、(C)は地面が濡れ、水溜り320の水面が風等により変動したときの波形パターンの例である。
【0042】
図2(A)において、点P12は、前記第1の警報信号が発生した時点t2の前記複素相関合成値である。同様に、点P11は、前記時点t2から所定時間、例えば2秒、前の時点t1の前記複素相関合成値である。同様に、点P13は、前記時点t2から所定時間、例えば2秒、後の蓄積が完了した時点の前記複素相関合成値である。
このように、侵入物体が本来検出したい侵入者(人)等のいわゆる検出対象の侵入物体300である場合には、前記複素相関合成値は、前記点P11から時計回りにらせん状に変化し、前記点P12を通過して、点P14で折り返して前記点P13に至る。
なお、前記複素相関合成値が、前記検出対象の侵入物体の移動に伴って前記点P14で折り返す現象は、例えば図3に例示してあるように、前記検出対象の侵入物体300が、侵入防止エリアIDA外から、監視エリアWAを横切って通過し侵入防止エリアIDA内に侵入した場合、前記検出対象の侵入物体300からの反射して受信用漏洩同軸ケーブルからなる電波受信手段401に受信される反射波の位相が、前記監視エリアWAの通過前と通過後とで、逆位相となるからである。
【0043】
図2(B)において、点P16は、前記第1の警報信号が発生した時点の複素相関合成値で、点P15はその時点から2秒前の点、点P17は2秒後の蓄積が完了した点の複素相関合成値である。
このように、鳥310の通過よって前記複素相関合成値は点P15から急激に変化し、点P16を通過して、点P18で折り返して点P17に至る。
【0044】
図2(C)において、点P20は、前記第1の警報信号が発生した時点の前記複素相関合成値で、点P19はその時点から2秒前の点、点P21は2秒後の蓄積が完了した点の前記複素相関合成値である。
このように、水溜り320の水面の変動よって前記複素相関合成値は点P19からランダムに変化する。
【0045】
このように、監視エリアWAを通過する侵入物体の種類によって前記複素相関合成値(合成ベクトル)の変化のパターンが異なる。これは、侵入物体のサイズ、材質、比誘電率、導電率、通過経路や状態の変化、等に依存して異なる。
【0046】
このような各種の進入物体に対応した各種の前記波形パターンの中から、検知対象の侵入物体に対応した波形パターンを判別するパターン解析の手法には、例えばらせん関数の関数フィッテング手法を使用する。本来検知したい前記検出対象の侵入物体300が監視エリアWAに侵入すると、前記蓄積複素相関値を使った前記複素相関合成値の時間的変化のパターンの特徴としてらせん回転するためである。従って、例えば、前記複素相関合成値の時間的変化のパターンのらせん曲率をパターンマッチング指標とし前記判定器112に出力することで、前記判定器112で本来検知したい前記検出対象の侵入物体300の識別が可能となる。
【0047】
他に、パターンマッチング指標として、学習アルゴリズムを用いることもできる。これも、らせん回転を認識する目的で動作させるものであるが、k−NN法での最近傍学習点の識別番号(例えば、侵入物体=1、鳥=0)などを指標に用いることもできる。
【0048】
図2中の点P14でパターンが折り返すが、これは本来検知したい検知対象の侵入物体300を識別する特徴的な指標である。図2(C)の水面の変動でも場合によってらせん回転に非常に近い場合が生じる可能性がある。しかし、らせんの円軌道が第1の警報信号が発生した後もしばらく続き、折り返す挙動も含めて侵入物体を判定すれば大幅に誤報を低減できる。この折返し点も含めた判別は前記関数フィッティングの手法よりも前記学習アルゴリズムの手法を用いる方が効果的に判別できる。
【0049】
この折返し点は、通常の検知(この場合、第1の警報信号が発生)後に現れる侵入時の特徴的な現象であり、この折返し点を観測し、それを本来検知したい前記検出対象の侵入物体300侵入物体の判別材料に用いることで的確な侵入判別を行うことができる。
【0050】
前記判定器112は、前記第2のしきい値レジスタ111に予め設定されたしきい値で、パターンマッチング指標を判定し、しきい値の範囲に変化加速度があれば、警報器500に警報信号を出力する。
【0051】
警報器500は警報信号受けると警報を発令する。
【0052】
本実施形態の特徴は、パターン解析に前記第1の警報信号が発生した時点より後の情報をも用いて行う点にある。例えば、図2(A)の前記点P12は前記第1の警報信号が発生した時点の点であるが、この時点で前期パターン解析をすると、前記点P11から前記点P12までの情報しかなく、これは、図2(B)と区別ができない場合がある。
【0053】
すなわち、本実施形態によれば、前記第1の警報信号が発生した時点より後の情報も合わせて所定時間蓄積された前記複素相関合成値から、前記侵入物体の進入による所定時間にわたる前記複素相関合成値の変化パターンの解析を行うことで、鳥などの小さな飛来物(小動物)による誤報や水面の変動等の環境変動による誤報をなくし、的確に、本来検出したい検知対象の侵入物体を検知できる。
【0054】
実施の形態2.
以下、本実施の形態2を、図6により説明する。図6は侵入物体識別方法を実行する侵入物体識別装置のシステム構成の一例および当該侵入物体識別装置における侵入物体識別センサ装置の内部構成の他の例を例示する図である。
【0055】
漏洩同軸ケーブル長手方向の全場所で検知する必要があるため、本実施の形態2は、複数のポイントを同時に観測するため、遅延回路と相関回路およびそれ以降の回路を複数搭載し、複数地点同時観測を行うようにした事例、つまり、破線で囲んだ所定時間侵入継続判定手段113を、複数113,113−2,・・・113−n設けた事例である。
【0056】
判定器112が侵入物体と判定したとき、その判定器の列番号から漏洩同軸ケーブル長手方向の侵入物体の距離が分かる。そのため、その列番号を距離に変換し、距離情報を警報機500に伝送することで、警報機500は侵入の有無とその位置を出力できる。
【0057】
ここで、侵入物体が漏洩同軸ケーブル長手方向に移動した場合を考える。ことのき、複数の所定時間侵入継続判定手段113,113−2,・・・113−nの各判定器112はいつも同じ判定を下すとは限らない。よって、各判定器112の時間的に連続する判定出力を、多数決判定手段114により多数決判定し、より確かな判定結果を出力する。
【0058】
例えば、所定時間侵入継続判定回路回路113を3台搭載したとし、1番目の所定時間侵入継続判定回路回路113の判定器112と、2番目の所定時間侵入継続判定回路回路113−2の判定器112と、3番目の所定時間侵入継続判定回路回路113−nの判定器112が、侵入物体300の移動に伴って、侵入→侵入→侵入と3回侵入物体を判定した後、続いて、鳥(小動物)310と判定出力があった場合は、侵入:小動物=3:1となり、侵入と判定する。
【0059】
このように、漏洩同軸ケーブルからなる電波送信手段201、電波受信手段401を用いる場合は、判定結果が途中で異なる場合もあるが、多数決判定によって誤認識を回避できる。
【0060】
以上のように、本実施の形態2によれば、検知対象の侵入物体の侵入の有無とその位置を的確に出力できると共に、多数決判定によって更に誤認識を回避して更に的確な侵入検知ができる。
【0061】
実施の形態3.
以下、本実施の形態3を、図7により説明する。図7は侵入物体識別装置のシステム構成の他の例を概念的に例示する図である。
【0062】
本実施の形態3は、図7に例示してあるように、受信には受信漏洩同軸ケーブル401を用い、送信には漏洩同軸ケーブルではないが漏洩同軸ケーブルと等価な例えばアレイアンテナ等の、電波を平面的に例えば360度放射可能な通常の送信アンテナ200を設けた事例を概念的に例示するものである。
【0063】
受信漏洩同軸ケーブル401を円形に配設し、送信アンテナ200を円の中央に配置する。このようすることで、監視エリアは面状になる。また、実施の形態2で説明したように、複数のポイントを同時に観測できるようにすれば、円のどこから侵入したかを判定することができる。
【0064】
尚、送受のアンテナを入れ替え、送信に漏洩同軸ケーブルを、受信に通常のアンテナを用いても同様の効果が得られる。
【0065】
このように実施の形態3では、電波送信手段及び電波受信手段の片方を漏洩同軸ケーブルとすることで、面状のエリア監視が可能となる。
【0066】
実施の形態4.
以下、本実施の形態4を、図8により説明する。図8は侵入物体識別装置のシステム構成の更に他の例を概念的に例示する図である。
【0067】
本実施形態では、前記第1の警報信号を、図8に例示してあるように、前記侵入物体識別センサ装置100の外部に出力し、この信号に基づいて監視カメラ600の回転角度やズームを調整制御するものである。
【0068】
実施の形態2で説明したように、複数のポイントを同時に観測できるようにすれば、第1の警報信号で位置情報も送れるため、前記監視カメラ600を監視エリアWAの侵入物体にピンポイントに向け、前記監視カメラ600の撮影画像をモニタ画面700に表示することができる。
【0069】
その後、実施の形態1で説明したように、前記波形パターンを解析して検知対象の侵入物体300を検知したときに前記警報機500が警報を鳴らす。
【0070】
監視カメラ600は回転に時間がかかるため、前記警報機500が作動してから回転させていたのでは時間遅延が発生し検知対象の侵入物体300が高速に移動する場合、当該検知対象の侵入物体300を捉えきれない恐れがある。そのため、前記第1の警報信号で前記監視カメラ600だけ検知対象の侵入物体300に照準を合わせ、前記侵入物体識別センサ装置100により侵入物体と判定されたときに警報を鳴らす。このようにすることで、監視員は前記警報機500による警報時のみ前記モニタ画面700をみればよく、監視の質向上に繋がる。
【0071】
このように、実施の形態4では反応に時間のかかる監視カメラ500を、前記侵入物体識別センサ装置100による検出対象の侵入物体の識別あるいは前記警報機500の作動より先に駆動させるため、警報が発生した時点で検出対象の侵入物体を的確に確認できる。
【0072】
実施の形態5.
以下、本実施の形態5を、図9により説明する。図9は侵入物体識別装置のシステム構成の更に他の例を概念的に例示する図である。
【0073】
本実施の形態5は、第1の警報信号を、前記侵入物体識別センサ装置100以外の他のセンサから得ることを特徴とするものである。
【0074】
本実施の形態5では、図9に例示してあるように、光学センサ等の第1段階の侵入検知装置800を、前記侵入防止エリアIDAの前記電波送信手段201及び前記電波受信手段401より外側に前記侵入防止エリアIDAの外縁に沿って設置し、当該第1段階の侵入検知装置800は、侵入を感知すると前記第1の警報信号相当の信号を前記侵入物体識別センサ装置100に送る。
【0075】
前記侵入物体識別センサ装置100では、前記第1段階の侵入検知装置800からの第1の警報信号(第1の侵入出力信号)は、実施例1〜3と同様にメモリ109に接続され、以後、前記侵入物体識別センサ装置100が、実施の形態1〜3で説明したように、動作する。
【0076】
なお、前記第1段階の侵入検知装置800は、例えば、赤外線、レーザ等の光学センサ等を利用した周知の侵入検知装置を使用することで足りる。
【0077】
前記第1段階の侵入検知装置800は、例えば、フェンスや塀900の上部に設置する。
【0078】
侵入物体300の侵入がある場合、まず、この前記第1段階の侵入検知装置800で侵入物体300を捉える。その後、漏洩同軸ケーブルからなる前記電波送信手段201及び前記電波受信手段を介して前記侵入物体識別センサ装置100によって侵入物体300の反射信号が捕らえられ、実施例1〜3で説明したように前記波形パターン認識によって、本来検知したい検知対象の侵入物体300と判定されると、前記侵入物体識別センサ装置100から警報信号が前記警報器500に送られ前記警報器500の警報が鳴る。
【0079】
鳥や猫などの小動物が塀900上を進んで、その結果、仮に前記第1段階の侵入検知装置800が作動して前記第1の警報信号(第1の侵入出力信号)が前記侵入物体識別センサ装置100に上がったとしても、鳥や猫などの小動物が前記塀900の上であることから、漏洩同軸ケーブルからなる前記電波送信手段201及び前記電波受信手段の電波への影響はなく、前記侵入物体識別センサ装置100が侵入物体を検知しないため、前記警報器500は、不要な警報を鳴らない。
【0080】
また、鳥などの小動物が、漏洩同軸ケーブルからなる前記電波送信手段201及び前記電波受信手段401の電波に影響する範囲内に入ったとしても、そのときは前記第1段階の侵入検知装置800が不作動であり、前記第1の警報信号(第1の侵入出力信号)は前記侵入物体識別センサ装置100に入ってないため、前記警報器500から不要な警報は鳴らない。なお、この場合でも鳥などの侵入は、前記侵入物体識別センサ装置100における前記パターン認識で、検知対象の侵入物体300の侵入とは認定されない。
【0081】
更に、実施の形態1〜3では、通行物体のある道路際に漏洩同軸ケーブルからなる前記電波送信手段201及び前記電波受信手段401を敷設すると、通行者の反射信号を前記電波受信手段401が受信し、不要な警報を発令する恐れがあるが、光センサなどの前記第1段階の侵入検知装置800で第1の警報信号(第1の侵入出力信号)を上げれるので、不要な警報を発生しない。また、光センサだけでは木の葉や小動物で警報がでるが、電波との組合せにより侵入の識別を行うので不要な警報がない。
【0082】
尚、前記他のセンサである前記第1段階の侵入検知装置800が発生する警報信号で監視カメラを回すようにすることで、実施の形態4で説明した効果も付加できる。
【0083】
このように実施の形態5では、電波以外の光センサなどの前記第1段階の侵入検知装置800で第1の警報(第1の侵入出力信号)を上げ、第2段階で電波による監視を行うため、誤報の低減が図れ、道路脇など電波だけでは誤報が発生する恐れがあるところにも設置が可能である。
【0084】
前述の各実施の形態は、それぞれの利点を活かすために、適宜組み合わせた、侵入物体識別方法、侵入物体識別装置、及び侵入物体識別センサ装置としてもよい。
【0085】
なお、各図中、同一符合は同一または相当部分を示す。
【0086】
前述の実施の形態1〜5は前述した通りであり、従って、本願の技術的特徴点は、他の観点からの技術的特徴点も含め、以下の通りである。
【0087】
特徴点1.
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段とこの電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別方法である。
【0088】
特徴点2.
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段とこの電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別方法である。
【0089】
特徴点3.
特徴点1又は特徴点2に記載の侵入物体識別方法において、前記侵入物体侵入状態情報が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく基本ベクトルと、前記電波受信手段が前記侵入物体から反射された電波を受信して出力した受信信号に基づく反射波ベクトルと、を合成して得られた合成ベクトルの情報であり、この合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別方法である。
【0090】
特徴点4.
特徴点3に記載の侵入物体識別方法において、前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別することを特徴とする侵入物体識別方法である。
【0091】
特徴点5.
特徴点3に記載の侵入物体識別方法において、前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別することを特徴とする侵入物体識別方法である。
【0092】
特徴点6.
特徴点1又は特徴点2に記載の侵入物体識別方法において、前記侵入物体の検知に基づき、前記検知対象の侵入物体の識別より前に監視カメラの回転監視モードでの制御が行われることを特徴とする侵入物体識別方法である。
【0093】
特徴点7.
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0094】
特徴点8.
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置を備え、前記第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0095】
特徴点9.
特徴点7又は特徴点8に記載の侵入物体識別装置において、前記侵入物体侵入状態情報が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく基本ベクトルと、前記電波受信手段が前記侵入物体から反射された電波を受信して出力した受信信号に基づく反射波ベクトルと、を合成して得られた合成ベクトルの情報であり、この合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0096】
特徴点10.
特徴点9に記載の侵入物体識別装置において、前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0097】
特徴点11.
特徴点9に記載の侵入物体識別装置において、前記合成ベクトルの変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0098】
特徴点12.
特徴点7又は特徴点8に記載の侵入物体識別装置において、前記侵入物体の検知に基づき、前記検知対象の侵入物体の識別より前に監視カメラの回転監視モードでの制御が行われることを特徴とする侵入物体識別装置である。
【0099】
特徴点13.
少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段、受信信号を送信から受信までの伝搬時間だけ遅延した複素受信信号を抽出する直交検波手段、前記複素受信信号を距離毎に蓄積する第1の複素信号蓄積手段、前記第1の複素信号蓄積手段に蓄積された現時点から所定の過去時間までの前記複素受信信号を使って、所定の第1の複素演算によって侵入物体の侵入状態値を出力する第1の演算手段、この第1の演算手段が演算した前記侵入状態値が、予め設定した所定のしきい値を超えていた場合に第1の侵入出力を出す第1の侵入判別出力手段、前記第1の侵入出力が出されるとその後の前記複素受信信号を所定の時間だけ蓄積する第2の複素信号蓄積手段、前記第2の複素信号蓄積手段が蓄積した複素受信信号を使って、所定の第2の複素演算によって前記侵入物体の移動状態の出力を出す第2の演算手段、及びこの第2の演算手段の前記移動状態の出力から検知対象の侵入物体の侵入を判別し、前記検知対象の侵入物体が侵入したこと及びその侵入地点の距離を出力する第2の侵入判別出力手段を備えた侵入物体識別装置である。
【0100】
特徴点14.
特徴点13に記載の侵入物体識別装置において、前記侵入物体の移動状態の出力が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく複素平面上の基本ベクトルと、前記電波受信手段が、前記侵入物体から反射された電波を受信して出力した受信信号に基づく複素平面上の反射波ベクトルと、を合成して得られた複素平面上の合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0101】
特徴点15.
特徴点14に記載の侵入物体識別装置において、前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0102】
特徴点16.
特徴点14に記載の侵入物体識別装置において、前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別することを特徴とする侵入物体識別装置である。
【0103】
特徴点17.
特徴点13に記載の侵入物体識別装置において、前記第1及び第2の複素信号蓄積手段、前記第1及び第2の演算手段、及び前記第1及び第2の侵入判別出力手段で構成された所定時間侵入継続判定部が複数設けられ、これら複数の所定時間侵入継続判定部のそれぞれが前記検知対象の侵入物体の侵入を判別することを特徴とする侵入物体識別装置である。
【0104】
特徴点18.
特徴点17に記載の侵入物体識別装置において、前記複数の所定時間侵入継続判定部のそれぞれの前記第2の演算手段の前記移動状態の出力から検知対象の侵入物体の侵入を、多数決判定手段により多数決で判定することを特徴とする侵入物体識別装置である。
【0105】
特徴点19.
特徴点13に記載の侵入物体識別装置において、前記第1の演算手段の出力に基づき、前記第2の侵入判別手段による前記検知対象の侵入物体の侵入の判別より前に、監視カメラの回転監視モードでの制御が行われることを特徴とする侵入物体識別装置である。
【0106】
特徴点20.
少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段のうちの前記電波送信手段が放射した電波を受信し受信信号を出力する電波受信手段の受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置において、前記侵入物体の検知から前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する所定時間侵入継続判定部を備えていることを特徴とする侵入物体識別センサ装置である。
【0107】
特徴点21.
特徴点20に記載の侵入物体識別センサ装置において、前記侵入物体侵入状態情報が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく基本ベクトルと、前記電波受信手段が前記侵入物体から反射された電波を受信して出力した受信信号に基づく反射波ベクトルと、を合成して得られた合成ベクトルの情報であり、この合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別することを特徴とする侵入物体識別センサ装置である。
【0108】
特徴点22.
特徴点21に記載の侵入物体識別センサ装置において、前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別することを特徴とする侵入物体識別センサ装置である。
【0109】
特徴点23.
特徴点21に記載の侵入物体識別センサ装置において、前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別センサ装置である。
【0110】
特徴点24.
検知電波を送信する電波送信手段と、検知電波を受信し受信信号を出力する電波受信手段と、受信信号を送信から受信までの伝搬時間だけ遅延した複素受信信号を抽出する直交検波相関手段と、前記複素受信信号を蓄積する各距離で番号付けされた複素信号蓄積手段(第1の複素信号蓄積手段)と、蓄積された現時点から所定の過去時間までの複素受信信号を使って、所定の複素演算によって第1の状態数値を出力する第1の演算手段と、前記第1の状態数値を予め設定した所定のしきい値で判定し、しきい値を超えていた場合に第1の警報を出力する第1の警報手段と、前記第1の警報を出力された後で、前記複素受信信号を所定の時間だけ更に蓄積する追加複素信号蓄積手段(第2の複素信号蓄積手段)と、前記追加複素信号蓄積手段(第2の複素信号蓄積手段)が蓄積した複素受信信号と、前記複素信号蓄積手段(第1の複素信号蓄積手段)が蓄積した複素受信信号とを合わせて、所定の第2の複素演算によって第2の状態数値を出力する第2の演算手段と、前記第2の状態数値を予め設定した所定の第2のしきい値で判定し、この第2のしきい値を超えていた場合に最終の警報(第2の警報)と距離とを出力する最終警報手段(第2の警報手段)とを備えた侵入物体識別装置である。
【0111】
特徴点25.
特徴点24に記載の侵入物体識別装置において、前記電波送信手段、前記電波受信手段の両方若しくは片方が漏洩同軸ケーブルであることを特徴とする侵入物体識別装置である。
【0112】
特徴点26.
特徴点24又は特徴点25に記載の侵入物体識別装置において、追加複素信号蓄積手(第2の複素信号蓄積手段)が蓄積した複素受信信号から、波形パターンの折返しパターンを抽出し、その度合いを出力する第2の演算手段を備えていることを特徴とする侵入物体識別装置である。
【0113】
特徴点27.
特徴点24又は特徴点25に記載の侵入物体識別装置において、前記第2の演算手段が、前記パターン抽出にらせん波形のフィッティング状態を前記第2の状態数値として出力するを特徴とする侵入物体識別装置である。
【0114】
特徴点28.
特徴点25に記載の侵入物体識別装置において、複数の並列的に動作する前記直交検波相関手段、前記複素信号蓄積手段(第1の複素信号蓄積手段)、前記第1の演算手段、前記第1の警報手段、前記追加複素信号蓄積手段(第2の複素信号蓄積手段)、前記第2の演算手段を有することを特徴とする侵入物体識別装置である。
【0115】
特徴点29.
特徴点28に記載の侵入物体識別装置において、前記複数の第2の演算手段の出力を多数決判定する多数決判定手段を備えていることを特徴とする侵入物体識別装置である。
【0116】
特徴点30.
特徴点24又は特徴点25に記載の侵入物体識別装置において、前記第1の警報手段の出力をカメラ制御手段に送り、前記最終警報手段(第2の警報手段)が警報を出力するまえに、侵入物体をカメラで捕らえるように制御することを特徴とする侵入物体識別装置である。
【0117】
特徴点31.
検知電波を送信する電波送信手段と、検知電波を受信し受信信号を出力する電波受信手段と、受信信号を送信から受信までの伝搬時間だけ遅延した複素受信信号を抽出する直交検波相関手段と、前記複素受信信号を蓄積する各距離で番号付けされた複素信号蓄積手段と、各距離の複素受信信号を蓄積する複素信号蓄積手段と、外部機器から第1の警報を受けると、前記複素受信信号を所定の時間だけ更に蓄積する追加複素信号蓄積手段と、前記追加複素信号蓄積手が蓄積した複素受信信号と、前記複素信号蓄積手段が蓄積した複素受信信号とを合わせて、所定の第2の複素演算によって第2の状態数値を出力する第2演算手段と、前記第2の状態数値を予め設定した所定の第2のしきい値で判定し、この第2のしきい値を超えていた場合に最終の警報と距離とを出力する最終警報手段とを備えた侵入物体識別装置である。
【0118】
特徴点32.
特徴点31に記載した侵入物体識別装置であって、前記電波送信手段、前記電波受信手段の両方若しくは片方が漏洩同軸ケーブルであることを特徴とする侵入物体識別装置である。
【0119】
特徴点33.
特徴点31又は特徴点32に記載の侵入物体識別装置において、前記追加複素信号蓄積手段が蓄積した複素受信信号から、波形パターンの折返しパターンを抽出し、その度合いを出力する第2の演算手段を備えていることを特徴とする侵入物体識別装置である。
【0120】
特徴点34.
特徴点31又は特徴点32に記載の侵入物体識別装置において、前記第2の演算手段が、前記パターン抽出にらせん波形のフィッティング状態を前記第2の状態数値として出力することを特徴とする侵入物体識別装置である。
【0121】
特徴点35.
特徴点32に記載の侵入物体識別装置において、複数の並列的に動作する前記直交検波相関手段、前記複素信号蓄積手段、前記演算手段、前記第1の警報手段、前記追加複素信号蓄積手段、前記第2の演算手段を有することを特徴とする侵入物体識別装置である。
【0122】
特徴点36.
特徴点35に記載の侵入物体識別装置であって、前記複数の第2の演算手段の出力を多数決判定する多数決判定手段を備えていることを特徴とする侵入物体識別装置である。
【0123】
特徴点37.
特徴点31又は特徴点32に記載の侵入物体識別装置において、外部機器からの第1の警報をカメラ制御手段に送り、最終警報手段が警報を出力する前に、侵入物体を捕らえるように制御することを特徴とする侵入物体識別装置である。
【図面の簡単な説明】
【0124】
【図1】この発明の実施の形態1を示す図で、侵入物体識別方法を実行する侵入物体識別装置のシステム構成の一例および当該侵入物体識別装置における侵入物体識別センサ装置の内部構成の一例を例示する図である。
【図2】この発明の実施の形態1を示す図で、侵入物体毎の受信信号における基本波(侵入物体に遮られずに送信用漏洩同軸ケーブルから受信用漏洩同軸ケーブルに直接受信される電波)のベクトルである基本ベクトルと、侵入物体から反射して受信用漏洩同軸ケーブルに受信される反射波のベクトルである反射波ベクトルとの合成ベクトルの、侵入物体侵入状態の経時変化に伴う軌跡(ベクトル軌跡)を例示する図で、(a)は侵入物体が人の場合の侵入形態の事例、(A)は侵入物体が人の場合に対応するベクトル軌跡の実測事例、(b)は侵入物体が鳥の場合の侵入形態の事例、(B)は侵入物体が鳥の場合に対応するベクトル軌跡の実測事例、(c)は侵入物体が漏洩同軸ケーブルのそばにできた水溜り(漏洩同軸ケーブルに物理的には侵入はしないが、水溜りからの反射波が受信信号に影響することから等価的侵入物体である)の場合の侵入形態の事例、(C)は侵入物体が水溜り場合に対応するベクトル軌跡の実測事例、をそれぞれ例示してある。
【図3】この発明の実施の形態1を示す図で、検知対象の侵入物体(人)等の侵入過程と、基本波(侵入物体に遮られずに送信用漏洩同軸ケーブルから受信用漏洩同軸ケーブルに直接受信される電波)および侵入物体から反射して受信用漏洩同軸ケーブルに受信される反射波との関係の説明図である。
【図4】この発明の実施の形態1を示す図で、基本ベクトルと反射波ベクトルと合成ベクトルとを複素平面で例示した図である。
【図5】この発明の実施の形態1を示す図で、合成ベクトルの変化の状態を、縦軸を電界強度、横軸を時間(経過時間)として例示する図である。
【図6】この発明の実施の形態2を示す図で、侵入物体識別方法を実行する侵入物体識別装置のシステム構成の一例および当該侵入物体識別装置における侵入物体識別センサ装置の内部構成の他の例を例示する図である。
【図7】この発明の実施の形態3を示す図で、侵入物体識別装置のシステム構成の他の例を概念的に例示する図である。
【図8】この発明の実施の形態4を示す図で、侵入物体識別装置のシステム構成の更に他の例を概念的に例示する図である。
【図9】この発明の実施の形態5を示す図で、侵入物体識別装置のシステム構成の更に他の例を概念的に例示する図である。
【符号の説明】
【0125】
P11 時点t2から所定時間、例えば2秒、前の時点t1の前記複素相関合成値、
P12 第1の警報信号が発生した時点t2の前記複素相関合成値、
P13 時点t2から所定時間、例えば2秒、後の蓄積が完了した時点の前記複素相関合成値、
P14 折り返し点の複素相関合成値、
P15 点P16から2秒前の点の複素相関合成値、
P16 第1の警報信号が発生した時点の複素相関合成値、
P17 2秒後の蓄積が完了した点の複素相関合成値、
P18 折り返して点の複素相関合成値、
P19 P20から2秒前の点、
P20 第1の警報信号が発生した時点の複素相関合成値、
P21 2秒後の蓄積が完了した点の複素相関合成値、
100 侵入物体識別センサ装置、
101 符号発生器、
102 発振器、
103 変調器、
104 直交検波器(直交検波手段)、
105 遅延回路、
106 相関回路(第1の演算手段)、
107 第1のしきい値レジスタ、
108 第1の侵入判別出力手段、
109 メモリ、
1091 第1の複素信号蓄積手段、
1092 第2の複素信号蓄積手段、
110 演算器(第2の演算手段)、
111 第2のしきい値レジスタ、
112 第2の侵入判別出力手段、
113 所定時間侵入継続判定部、
113−1 所定時間侵入継続判定部、
113−n 所定時間侵入継続判定部、
114 多数決判定手段、
200 送信アンテナ、
201 送信漏洩同軸ケーブル(電波送信手段)、
202 終端器、
300 侵入物体、
310 鳥、
320 地面が濡れ、
401 受信漏洩同軸ケーブル(電波受信手段)、
402 終端器、
500 警報器、
600 監視カメラ、
700 モニタ画面、
800 第1段階の侵入検知装置(光学センサ)、
900 フェンスや塀、
IDA 侵入防止エリア、
WA 監視エリア。
【特許請求の範囲】
【請求項1】
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段とこの電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、
前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別方法。
【請求項2】
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段とこの電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、
前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別方法。
【請求項3】
請求項1又は請求項2に記載の侵入物体識別方法において、
前記侵入物体侵入状態情報が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく基本ベクトルと、前記電波受信手段が前記侵入物体から反射された電波を受信して出力した受信信号に基づく反射波ベクトルと、を合成して得られた合成ベクトルの情報であり、この合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別方法。
【請求項4】
請求項3に記載の侵入物体識別方法において、
前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別方法。
【請求項5】
請求項3に記載の侵入物体識別方法において、
前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別方法。
【請求項6】
請求項1又は請求項2に記載の侵入物体識別方法において、
前記侵入物体の検知に基づき、前記検知対象の侵入物体の識別より前に監視カメラの回転監視モードでの制御が行われる
ことを特徴とする侵入物体識別方法。
【請求項7】
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、
前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項8】
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、
前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置を備え、
前記第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項9】
請求項7又は請求項8に記載の侵入物体識別装置において、
前記侵入物体侵入状態情報が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく基本ベクトルと、前記電波受信手段が前記侵入物体から反射された電波を受信して出力した受信信号に基づく反射波ベクトルと、を合成して得られた合成ベクトルの情報であり、この合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項10】
請求項9に記載の侵入物体識別装置において、
前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項11】
請求項9に記載の侵入物体識別装置において、
前記合成ベクトルの変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項12】
請求項7又は請求項8に記載の侵入物体識別装置において、
前記侵入物体の検知に基づき、前記検知対象の侵入物体の識別より前に監視カメラの回転監視モードでの制御が行われる
ことを特徴とする侵入物体識別装置。
【請求項13】
少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段、
受信信号を送信から受信までの伝搬時間だけ遅延した複素受信信号を抽出する直交検波手段、
前記複素受信信号を距離毎に蓄積する第1の複素信号蓄積手段、
前記第1の複素信号蓄積手段に蓄積された現時点から所定の過去時間までの前記複素受信信号を使って、所定の第1の複素演算によって侵入物体の侵入状態値を出力する第1の演算手段、
この第1の演算手段が演算した前記侵入状態値が、予め設定した所定のしきい値を超えていた場合に第1の侵入出力を出す第1の侵入判別出力手段、
前記第1の侵入出力が出されるとその後の前記複素受信信号を所定の時間だけ蓄積する第2の複素信号蓄積手段、
前記第2の複素信号蓄積手段が蓄積した複素受信信号を使って、所定の第2の複素演算によって前記侵入物体の移動状態の出力を出す第2の演算手段、及び
この第2の演算手段の前記移動状態の出力から検知対象の侵入物体の侵入を判別し、前記検知対象の侵入物体が侵入したこと及びその侵入地点の距離を出力する第2の侵入判別出力手段
を備えた侵入物体識別装置。
【請求項14】
請求項13に記載の侵入物体識別装置において、
前記侵入物体の移動状態の出力が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく複素平面上の基本ベクトルと、前記電波受信手段が、前記侵入物体から反射された電波を受信して出力した受信信号に基づく複素平面上の反射波ベクトルと、を合成して得られた複素平面上の合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項15】
請求項14に記載の侵入物体識別装置において、
前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項16】
請求項14に記載の侵入物体識別装置において、
前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項17】
請求項13に記載の侵入物体識別装置において、
前記第1及び第2の複素信号蓄積手段、前記第1及び第2の演算手段、及び前記第1及び第2の侵入判別出力手段で構成された所定時間侵入継続判定部が複数設けられ、
これら複数の所定時間侵入継続判定部のそれぞれが前記検知対象の侵入物体の侵入を判別する
ことを特徴とする侵入物体識別装置。
【請求項18】
請求項17に記載の侵入物体識別装置において、
前記複数の所定時間侵入継続判定部のそれぞれの前記第2の演算手段の前記移動状態の出力から検知対象の侵入物体の侵入を、多数決判定手段により多数決で判定する
ことを特徴とする侵入物体識別装置。
【請求項19】
請求項13に記載の侵入物体識別装置において、
前記第1の演算手段の出力に基づき、前記第2の侵入判別手段による前記検知対象の侵入物体の侵入の判別より前に、監視カメラの回転監視モードでの制御が行われる
ことを特徴とする侵入物体識別装置。
【請求項20】
少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段のうちの前記電波送信手段が放射した電波を受信し受信信号を出力する電波受信手段の受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置において、
前記侵入物体の検知から前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する所定時間侵入継続判定部を備えている
ことを特徴とする侵入物体識別センサ装置。
【請求項21】
請求項20に記載の侵入物体識別センサ装置において、
前記侵入物体侵入状態情報が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく基本ベクトルと、前記電波受信手段が前記侵入物体から反射された電波を受信して出力した受信信号に基づく反射波ベクトルと、を合成して得られた合成ベクトルの情報であり、この合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別センサ装置。
【請求項22】
請求項21に記載の侵入物体識別センサ装置において、
前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別センサ装置。
【請求項23】
請求項21に記載の侵入物体識別センサ装置において、
前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別センサ装置。
【請求項1】
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段とこの電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、
前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別方法。
【請求項2】
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段とこの電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段と前記侵入防止エリアの外縁に沿って敷設され前記電波受信手段が受信した前記受信信号から前記侵入防止エリアへの侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置、を使用して侵入物体の侵入を検知する侵入物体識別方法において、
前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別方法。
【請求項3】
請求項1又は請求項2に記載の侵入物体識別方法において、
前記侵入物体侵入状態情報が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく基本ベクトルと、前記電波受信手段が前記侵入物体から反射された電波を受信して出力した受信信号に基づく反射波ベクトルと、を合成して得られた合成ベクトルの情報であり、この合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別方法。
【請求項4】
請求項3に記載の侵入物体識別方法において、
前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別方法。
【請求項5】
請求項3に記載の侵入物体識別方法において、
前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別方法。
【請求項6】
請求項1又は請求項2に記載の侵入物体識別方法において、
前記侵入物体の検知に基づき、前記検知対象の侵入物体の識別より前に監視カメラの回転監視モードでの制御が行われる
ことを特徴とする侵入物体識別方法。
【請求項7】
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、
前記侵入物体識別センサ装置が前記侵入物体を検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項8】
侵入防止エリアの外縁に沿って敷設され電波を放射する漏洩同軸ケーブルからなる電波送信手段、前記侵入防止エリアの外縁に沿って敷設され前記電波送信手段が放射した前記電波を受信し受信信号を出力する漏洩同軸ケーブルからなる電波受信手段、及び前記電波受信手段が受信した前記受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置とを備えた侵入物体識別装置において、
前記侵入防止エリアの前記電波送信手段及び前記電波受信手段より外側に前記侵入防止エリアの外縁に沿って設置され前記侵入物体の侵入を初期検知する第1段階の侵入検知装置を備え、
前記第1段階の侵入検知装置が前記侵入物体を初期検知してから前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項9】
請求項7又は請求項8に記載の侵入物体識別装置において、
前記侵入物体侵入状態情報が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく基本ベクトルと、前記電波受信手段が前記侵入物体から反射された電波を受信して出力した受信信号に基づく反射波ベクトルと、を合成して得られた合成ベクトルの情報であり、この合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項10】
請求項9に記載の侵入物体識別装置において、
前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項11】
請求項9に記載の侵入物体識別装置において、
前記合成ベクトルの変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項12】
請求項7又は請求項8に記載の侵入物体識別装置において、
前記侵入物体の検知に基づき、前記検知対象の侵入物体の識別より前に監視カメラの回転監視モードでの制御が行われる
ことを特徴とする侵入物体識別装置。
【請求項13】
少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段、
受信信号を送信から受信までの伝搬時間だけ遅延した複素受信信号を抽出する直交検波手段、
前記複素受信信号を距離毎に蓄積する第1の複素信号蓄積手段、
前記第1の複素信号蓄積手段に蓄積された現時点から所定の過去時間までの前記複素受信信号を使って、所定の第1の複素演算によって侵入物体の侵入状態値を出力する第1の演算手段、
この第1の演算手段が演算した前記侵入状態値が、予め設定した所定のしきい値を超えていた場合に第1の侵入出力を出す第1の侵入判別出力手段、
前記第1の侵入出力が出されるとその後の前記複素受信信号を所定の時間だけ蓄積する第2の複素信号蓄積手段、
前記第2の複素信号蓄積手段が蓄積した複素受信信号を使って、所定の第2の複素演算によって前記侵入物体の移動状態の出力を出す第2の演算手段、及び
この第2の演算手段の前記移動状態の出力から検知対象の侵入物体の侵入を判別し、前記検知対象の侵入物体が侵入したこと及びその侵入地点の距離を出力する第2の侵入判別出力手段
を備えた侵入物体識別装置。
【請求項14】
請求項13に記載の侵入物体識別装置において、
前記侵入物体の移動状態の出力が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく複素平面上の基本ベクトルと、前記電波受信手段が、前記侵入物体から反射された電波を受信して出力した受信信号に基づく複素平面上の反射波ベクトルと、を合成して得られた複素平面上の合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項15】
請求項14に記載の侵入物体識別装置において、
前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項16】
請求項14に記載の侵入物体識別装置において、
前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別装置。
【請求項17】
請求項13に記載の侵入物体識別装置において、
前記第1及び第2の複素信号蓄積手段、前記第1及び第2の演算手段、及び前記第1及び第2の侵入判別出力手段で構成された所定時間侵入継続判定部が複数設けられ、
これら複数の所定時間侵入継続判定部のそれぞれが前記検知対象の侵入物体の侵入を判別する
ことを特徴とする侵入物体識別装置。
【請求項18】
請求項17に記載の侵入物体識別装置において、
前記複数の所定時間侵入継続判定部のそれぞれの前記第2の演算手段の前記移動状態の出力から検知対象の侵入物体の侵入を、多数決判定手段により多数決で判定する
ことを特徴とする侵入物体識別装置。
【請求項19】
請求項13に記載の侵入物体識別装置において、
前記第1の演算手段の出力に基づき、前記第2の侵入判別手段による前記検知対象の侵入物体の侵入の判別より前に、監視カメラの回転監視モードでの制御が行われる
ことを特徴とする侵入物体識別装置。
【請求項20】
少なくとも一方が侵入防止エリアの外縁に沿って敷設された漏洩同軸ケーブルである電波送信手段及び電波受信手段のうちの前記電波送信手段が放射した電波を受信し受信信号を出力する電波受信手段の受信信号から侵入物体の侵入の有無及び侵入位置を判定する侵入物体識別センサ装置において、
前記侵入物体の検知から前記侵入物体識別センサ装置が前記侵入物体を検知しなくなるまでの間における、前記電波受信手段の前記受信信号に基づく侵入物体侵入状態情報の、所定時間の間の変化の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する所定時間侵入継続判定部を備えている
ことを特徴とする侵入物体識別センサ装置。
【請求項21】
請求項20に記載の侵入物体識別センサ装置において、
前記侵入物体侵入状態情報が、前記侵入物体から反射されることなく受信して出力した前記受信信号に基づく基本ベクトルと、前記電波受信手段が前記侵入物体から反射された電波を受信して出力した受信信号に基づく反射波ベクトルと、を合成して得られた合成ベクトルの情報であり、この合成ベクトルが変化したときのベクトル軌跡の形態が所定の形態であるかどうかを判別することにより、検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別センサ装置。
【請求項22】
請求項21に記載の侵入物体識別センサ装置において、
前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の折り返しパターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別センサ装置。
【請求項23】
請求項21に記載の侵入物体識別センサ装置において、
前記合成ベクトルが変化したときのベクトル軌跡の形態が所定の螺旋状パターンであることを判別して前記検知対象の侵入物体を識別する
ことを特徴とする侵入物体識別センサ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−145318(P2010−145318A)
【公開日】平成22年7月1日(2010.7.1)
【国際特許分類】
【出願番号】特願2008−325160(P2008−325160)
【出願日】平成20年12月22日(2008.12.22)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年7月1日(2010.7.1)
【国際特許分類】
【出願日】平成20年12月22日(2008.12.22)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]