
便器洗浄システム
【課題】 簡単な構成で手動操作を検出可能とし、自動洗浄動作に対してフィードバック可能とした便器洗浄システムを提供することを目的とする。
【解決手段】 排水バルブを引き上げることによりロータンク内の水を排出させる引き上げ部と、前記引き上げ部の前記引き上げの動作を実行させるモータと、前記引き上げ部の前記引き上げの動作を実行させる手動操作ハンドルと、前記手動操作ハンドルを操作した時に前記モータの駆動軸に生ずる回転を検出する検出部と、を備えたことを特徴とする便器洗浄システムを提供する。
【解決手段】 排水バルブを引き上げることによりロータンク内の水を排出させる引き上げ部と、前記引き上げ部の前記引き上げの動作を実行させるモータと、前記引き上げ部の前記引き上げの動作を実行させる手動操作ハンドルと、前記手動操作ハンドルを操作した時に前記モータの駆動軸に生ずる回転を検出する検出部と、を備えたことを特徴とする便器洗浄システムを提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、便器洗浄システムに関し、より詳細には、水洗便器に取り付けて、手動及び電動によりロータンクから水洗便器に洗浄水を供給可能とした便器洗浄システムに関する。
【背景技術】
【0002】
手動及び電動のいずれにても水洗便器に洗浄水を供給可能としたモータユニットとして、ロータンクのレバー装置が開示されている(特許文献1)。このレバー装置は、モータを内蔵したスピンドル電動装置をロータンクの内部に収容可能とし、且つロータンクのレバー開口からロータンク外の突出するねじ付カラムを設けたものである。このねじ付きカラムにロータンクの外側からナットを螺合させ、スピンドル電動装置の基端部との間にロータンクの外壁を強く挟持することにより、スピンドル電動装置を固定可能とした。かかる構成により、レバー装置の取り付けが容易となり、さらにレバーとロータンクとの隙間を、旧来の手回し式のロータンクのものと変わらない程度まで抑え、見栄えを良くすることができる。
【特許文献1】特開2001−65028号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、このような便器洗浄システムにおいて、操作ハンドルを用いた手動操作が実行されたことをコントローラが認識できると便利である。例えば、手動操作による洗浄の後、ロータンクに十分に水が溜まらない状態で自動洗浄が実行されると、水量が不足するために十分な洗浄効果が得られない。このため、ふたたびロータンク内に洗浄水が満たされるまで待ってから改めて洗浄を実行しなければならず、使い勝手や水資源の節約の観点から改善の余地がある。
【0004】
また、水洗便器の形式に応じて、その最適水量は異なる場合が多い。これに対して、例えばモータユニットに可変抵抗などを設けて開閉バルブの開度あるいは開時間を調節する手段も考えられる。しかし、この場合には、可変抵抗を調節して洗浄水の水量の確認するという調整作業を数回以上繰り返さなければならず、使い勝手がよいとはいえない。
【0005】
本発明はかかる課題の認識に基づいてなされたものであり、その目的は、簡単な構成で手動操作を検出可能とし、自動洗浄動作に対してフィードバック可能とした便器洗浄システムを提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の一態様によれば、
排水バルブを引き上げることによりロータンク内の水を排出させる引き上げ部と、
前記引き上げ部の前記引き上げの動作を実行させるモータと、
前記引き上げ部の前記引き上げの動作を実行させる手動操作ハンドルと、
前記手動操作ハンドルを操作した時に前記モータの駆動軸に生ずる回転を検出する検出部と、
を備えたことを特徴とする便器洗浄システムが提供される。
【0007】
上記構成によれば、モータの駆動軸に生ずる回転を検出することにより手動操作を検出可能とし、モータによる自動動作に対してフィードバック可能とすることができる。
【0008】
ここで、前記モータの前記駆動軸と、前記手動操作ハンドルと、が減速手段を介して連動するものとすれば、手動操作ハンドルの操作に応じてモータの駆動軸が回転するので、手動操作の検出を確実且つ容易にすることができる。
【0009】
また、前記モータの駆動軸と、前記手動操作ハンドルと、は、前記引き上げ部の前記引き上げの動作を実行させるために必要なストロークの少なくとも一部において連動するものとすれば、例えは、空転領域を設けることにより、モータのコギングトルクなどを受けずに手動操作できる角度範囲を設けて軽快な操作が可能となる。
【0010】
また、前記手動操作ハンドルを操作した時に前記モータの駆動軸に生ずる前記回転を前記検出部が検出すると、その後、所定の時間の間は前記モータによる前記引き上げ動作の要求があっても前記モータによる前記引き上げの動作を実行しないものとすれば、手動操作による洗浄後、ロータンク内に水が十分に満たされない状態で自動洗浄を実施することを防ぐことができる。
【0011】
また、前記所定の時間の間に前記モータによる前記引き上げ動作の要求があった場合に、前記所定の時間の経過後に実行するものすれば、手動操作による洗浄の後、ロータンクに水が充填された後に確実に自動洗浄できる。
【0012】
また、前記所定の時間は、前記手動操作ハンドルの操作方向に応じて異なるものとすれば、例えば、手動操作により「大洗浄」が実施された場合と「小洗浄」が実施された場合とで、待機時間を可変とし、いずれの場合もロータンク内に水が充填された最適なタイミングで自動洗浄を実施できる。
【0013】
また、前記手動操作ハンドルを操作した時に前記検出部が検出する結果に基づいて前記手動操作ハンドルの回転方向及び回転時間の少なくともいずれかを判定し、その判定結果に基づいて、前記モータによる前記引き上げ動作の条件を決定するものとすれば、ロータンクの形式に応じて最適な動作モードを確実且つ容易に設定でき、また、使用者の好みのホールド時間などを学習させて自動洗浄にフィードバックさせることにより、使用感に優れた便器洗浄システムを実現できる。
【発明の効果】
【0014】
本発明によれば、手動操作を検出する機能を付加することにより、手動洗浄後の自動洗浄を最適なタイミングで実施し、ロータンクの形式に応じて最適な動作モードを確実且つ容易に設定でき、また、使用者の好みの時間のホールド動作を学習させることができる。 その結果として、ユーザは、ロータンクを買い換えることなく電動洗浄の恩恵に浴することができる。
【発明を実施するための最良の形態】
【0015】
以下、図面を参照しつつ本発明の実施の形態について説明する。
図1は、本発明の実施の形態にかかる便器洗浄システムを取り付けた水洗便器を例示した概念図である。
本発明の便器洗浄システムは、モータユニット10と、これを制御するコントローラ520と、を有する。コントローラ520は、モータユニット10に内蔵してもよく、または、モータユニット10とは別体のユニットとしてもよい。
図1の具体例の場合、コントローラ520は、便座400の後方(ロータンク200に近い側)に設けられている。便座400は、例えば、人体臀部を洗浄するための温水を噴出可能なノズルなどを内蔵してもよい。モータユニット10の動作は、コントローラ520に設けられた操作スイッチ(図示せず)により制御してもよく、または、リモコンユニット510により制御してもよい。リモコンユニット510とコントローラ520との間の通信は、例えば、赤外線や電波などにより実行させることができる。
【0016】
モータユニット10は、モータを内蔵し、水洗便器システムのロータンク200に取り付けられている。モータユニット10のシャフト82の先端には、玉鎖レバー84、85が適宜設けられている。シャフト82が矢印Aあるいは矢印Bの方向に回転すると、玉鎖220、230を介して排水バルブ240、250を引き上げ、便器300に洗浄水を流すことができる。シャフト82の回転動作は、モータユニット10に内蔵されたモータにより実行させることができる。また、モータユニット10には、操作ハンドル100が取り付けられ、これを用いた手動操作によっても、シャフト82を回転させて洗浄水を便器300に流すことができる。
【0017】
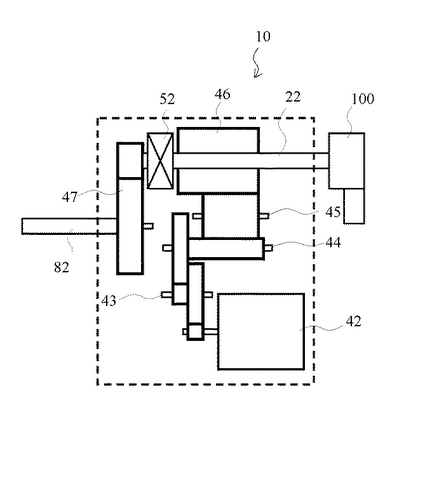
図2は、モータユニット10の内部構造を模式的に表した概念図である。なお、同図は、動力伝達関係を説明するための概念図であり、各要素の寸法や配置関係などは、必ずしも実際の通りとは限らない。
本具体例のモータユニット10の内部には、駆動源であるモータ42と、減速手段4して5段のギア43〜47が設けられている。5段目のギア47の回転トルクが、シャフト82に出力される。モータ42として、DC24ボルトで動作するブラシ型の高速モータを用いた場合、1段目から5段目までの減速比は、例えば1/100程度とすることができる。
【0018】
また、4段目のギア46のシャフト22には操作ハンドル100が取り付けられ、手動操作による洗浄も可能とされている。なお、操作ハンドル100は、5段目のギアにシャフト82と同軸に取り付けてもよい。
【0019】
さらに、シャフト22には、シャフトリターンスプリング52が設けられ、中立状態に付勢される。
【0020】
このモータユニット10の場合、モータ42と操作ハンドル100とはギア43〜46を介して連動する。つまり、操作ハンドル100を手動により回転させると、それに対応してモータ42の回転軸も回転する。後に詳述するように、本発明においては、このような手動操作に伴うモータ42の逆起電力を検出することによって、手動操作を検知することができる。
なお、本発明においては、モータ42と操作ハンドル100とは必ずしも常に直結されている必要はなく、操作ハンドル100の回転ストロークのうちの一部のみにおいてモータ42と結合されるようにしてもよい。例えば、後に詳述するように、クラッチ機構などを設け、操作ハンドル100は中立付近においてはモータ42とは結合されておらず、洗浄に際して操作ハンドル100を所定の角度以上回転させた時に、モータ42と結合されてその回転軸を回転させるようにしてもよい。このようにすると、手動操作の際に、モータ42のコギングトルクの負荷を減らして操作ハンドル100を軽い力で操作できる。
【0021】
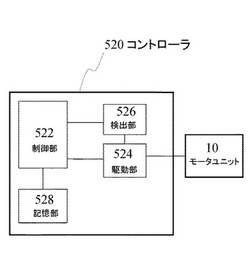
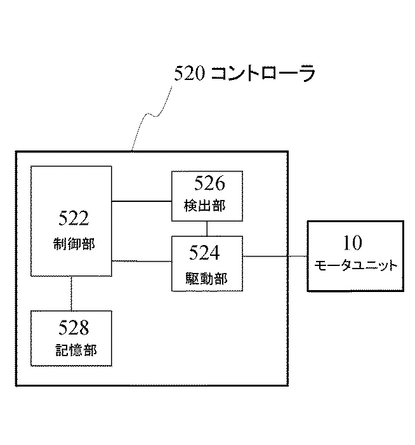
図3は、コントローラ520の要部構成を例示するブロック図である。
すなわちコントローラ520は、制御部522と、駆動部524と、検出部526と、記憶部528と、を有する。制御部522は、CPU(central processing unit)を備え、コントローラ520の各部の動作を制御する。駆動部524は、制御部522からの制御信号に応じてモータユニット10に駆動信号を出力する。検出部526は、操作ハンドル100を介して手動操作した時にモータユニット10から出力される信号を検出する。
【0022】
記憶部528は、手動操作の有無や動作モードなどに関する情報を制御部522からの制御により適宜記憶する。記憶部528としては、その格納すべき情報の種類に応じて、例えば、DRAM(dynamic random access memory)や、SRAM(static random access memory)、E2PROM(electrically erasable programmable read only memory)などのフラッシュメモリなどを適宜選択して用いることができる。また、これら2種類以上のメモリを併せ持つようにしてもよい。
【0023】
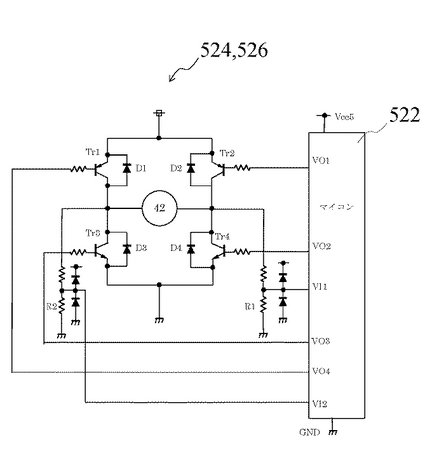
図4は、制御部522の回路構成を例示する模式図である。
すなわち、モータユニット10に内蔵されたモータ42の動作は、4つのスイッチング素子Tr1〜Tr4により制御できる。例えば、スイッチング素子Tr1とTr4をオンにし、Tr2とTr3をオフにすると、直流モータ42を所定の方向に回転させ、スイッチング素子Tr2とTr3をオンにし、Tr1とTr4をオフにすると、モータ42をこれとは逆の方向に回転させることができる。制御部522のCPUは、これらスイッチング素子Tr1〜Tr4の動作を出力VO1〜VO4によりそれぞれ制御できる。
【0024】
そして、モータ42への出力端ノードに検出抵抗R1、R2をそれぞれ接続し、この電位をV11、V12としてCPUに取り込むことにより、手動操作に伴うモータ42の回転を検出できる。
【0025】
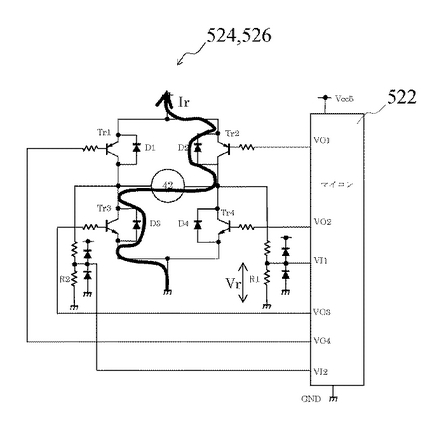
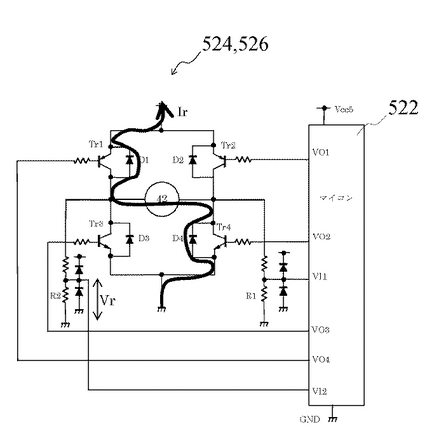
図5及び図6は、手動操作に伴う逆起電力の作用を表した模式図である。
すなわち、図2に関して前述したように、本発明においては、操作ハンドル100とモータ42とが、少なくとも手動操作ストロークの一部において直結されるので、操作ハンドル100を手動により回転させると、モータ42の回転軸も回転する。すると、モータ42において逆起電力が生じ、その回転方向に対応して、図5及び図6に例示した如く回生電流Irが流れる。例えば、図5に例示したように、逆起電力による回生電流IrがダイオードD3、モータ42、ダイオードD2の方向に流れた時には、検出抵抗R1の両端で電位Vrが生ずる。従って、V11の電位をモニタすることにより、モータ42の逆起電力を検出できる。
同様に、図6に例示したように、逆起電力による回生電流IrがダイオードD4、モータ42、ダイオードD1の方向に流れた時には、検出抵抗R2の両端で電位Vrが生ずる。従って、V12の電位をモニタすることにより、モータ42の逆起電力を検出できる。
【0026】
このように、モータ42の出力端ノードに検出抵抗R1、R2を接続し、その電位をモニタすることにより、手動操作の有無を検出できる。
【0027】
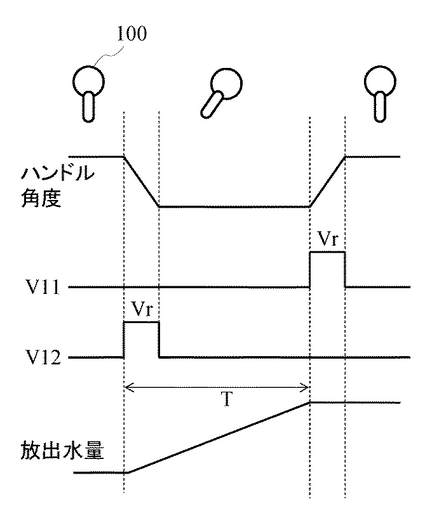
図7及び図8は、操作ハンドル100を手動操作した時の電位V11、V12及び放出水量の変化を例示するタイミングチャートである。
すなわち、図7に表したように、操作ハンドル100を中立位置から半時計回りに回転させた場合、回転動作に対応してV11に回生電流による電位Vrが生ずる。所定時間の経過後、操作ハンドル100を時計回りに回転させて再び中立位置に戻す時には、その回転動作に対応してV12に電位Vrが生ずる。
また、操作ハンドル100の操作に伴い、ロータンクの排水バルブが開かれて、便器に洗浄水が流される。その積算水量は、操作ハンドル100を中立位置に戻すまでの時間に応じて増加する。
【0028】
操作ハンドル100を反対方向に回転させた場合についても、図8に例示した如く、V12、V11に電位がそれぞれ生じ、便器に洗浄水が流される。
【0029】
以上説明したように、本発明においては、操作ハンドル100を手動操作する時にモータ42に生ずる回生電流を検出することにより、手動操作の有無や、その回転方向、操作ハンドル100を回転させた状態から中立位置に戻すまでの時間などを検出できる。本発明においては、これらの検出結果に基づいて、自動洗浄の可否判断や動作モードの設定などを実施できる。
【0030】
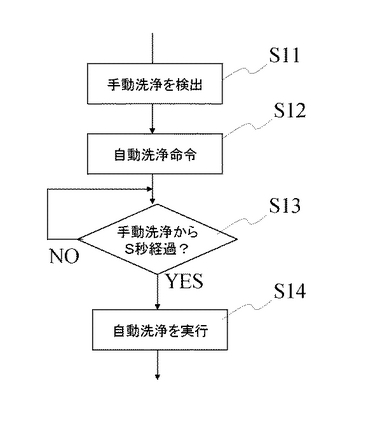
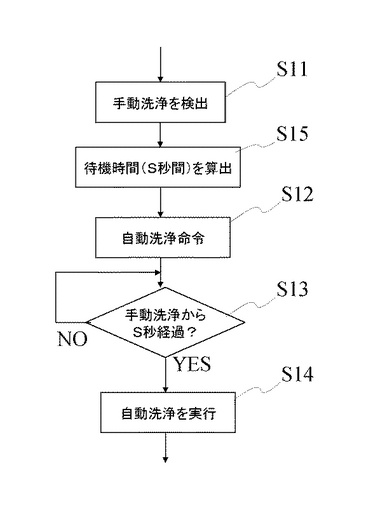
図9は、本発明の便器洗浄システムにおいて実行される処理の一例を表すフローチャートである。
本具体例においては、操作ハンドル100を用いた手動洗浄が実施された後、ロータンクに再び水が満たされるまでの所定の待機時間(S秒間)の間は、自動洗浄の実行を保留する。すなわち、手動洗浄を検出(ステップS11)した後に、例えば、リモコンユニット510(図1参照)が操作されて自動洗浄の命令が出された(ステップS12)場合、手動洗浄からS秒間が経過したか否かが判断される(ステップS13)。このS秒間は、ロータンクに水を充填するために必要とされる時間、あるいはこれに所定の調整時間を加算あるいは減算した時間とすることができる。
手動洗浄からS秒間が経過しない時(ステップS13:NO)は、経過するまで待機する。そして、S秒間が経過すると、自動洗浄を実行する(ステップS14)。
【0031】
このようにすれば、操作ハンドル100を用いた手動洗浄が実行された後に、ロータンクに水が充填されない状態で自動洗浄が実行されることを防ぐことができる。その結果として、不十分な水量の自動洗浄が実行されてしまい、その後、再びロータンクに水が充填されるのを待ってもう一度自動洗浄を実施するという煩雑さを解消し、水資源の節約にも資することができる。
【0032】
図10は、待機時間(S秒間)を可変とした処理の一例を表すフローチャートである。
【0033】
すなわち、本具体例においては、操作ハンドル100を用いた手動洗浄を検出する(ステップS11)と、その検出データから待機時間(S秒間)を算出する。これは、例えば、図7及び図8に関して前述したように、操作ハンドル100を中立位置から回転させ、再び中立位置に戻す際に、V11、V12にそれぞれ電位Vrが表れることから判定できる。例えば、図7及び図8において、V11とV12に電位Vrが表れる時間間隔Tから放出水量を推定できる。このようにして推定した放出水量から、ロータンクに再び水が充填されるまでの時間を算出し、この算出結果に基づいて、待機時間(S秒間)を決定できる。
【0034】
また一方、例えば、ロータンクの構造によっては、操作ハンドル100の右回転で「大洗浄」、左回転で「小洗浄」が実施される場合がある。このような場合に、図7及び図8に関して前述したように、V11、V12の電位を適宜モニタすることにより操作ハンドル100の回転方向を検出し、「大洗浄」が実施された場合には、第1の待機時間(S秒間)を設定し、「小洗浄」が実施された場合には、第2の待機時間(S秒間)を設定するようにしてもよい。この場合、第1及び第2の待機時間は、それぞれ、「大洗浄」、「小洗浄」が実施された後に、ロータンクが水で充填されるまでの時間に基づいて決定される。
【0035】
以上説明したように、図10に例示したフローチャートによれば、操作ハンドル100を用いた手動操作により流された洗浄水の量に応じて待機時間(S秒間)を可変とする。このようにすれば、例えば、手動操作により「小洗浄」が実施された場合には、短時間で再びロータンクが水で充填され、これに対応して直ちに自動洗浄を実行でき、一方、手動操作で「大洗浄」が実行された場合には、ロータンクが再び水で充填されるまで待機してから自動洗浄を実行できる。
【0036】
以上、手動操作が実施された後に、所定の待機時間を設ける具体例について説明した。
【0037】
次に、操作ハンドルを手動操作することにより、便器洗浄システムの動作モードを設定可能とした具体例について説明する。まず、ロータンクの形式に対応して、便器洗浄システムの動作モードを変える必要がある点について説明する。
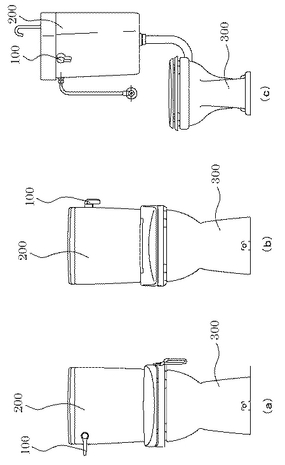
図11は、既存のロータンクの形態のいくつかを例示する模式図である。すなわち、同図(a)に表したものは、ロータンク200の正面左側に操作ハンドル100が設けられた、いわゆる「前ハンドル型」のロータンクである。また、図11(b)に表したものは、ロータンク200の向かって右側側面に操作ハンドル100が設けられた、いわゆる「右ハンドル型」のロータンクである。一方、図11(c)に表したものは、手洗い室のコーナーに配置可能な、いわゆる「隅付き型」のロータンクである。
【0038】
これらの具体例からも分かるように、ロータンク200の形状とその操作ハンドル100の取り付け位置だけを見ても、各種の形式が存在する。そしてさらに、その大小の洗浄水の流し分けの機構についてみると、さらに多種多様なモードが存在する。
【0039】
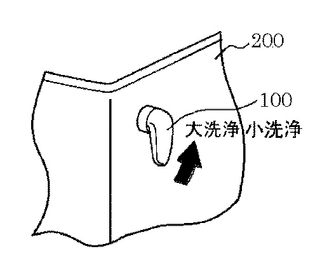
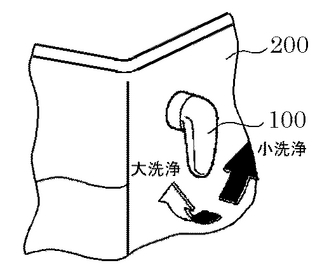
例えば、「大」用の洗浄水を流す際に、操作ハンドル100を右側に回転させるものと、左側に回転させるものが存在する。また、図12に例示したように、「小」用の洗浄水を流す際に、「大」用の洗浄水を流す場合と同方向に操作ハンドル100を回すものと、図13に表したように、互いに逆に回すものがある。
またさらに、図14に例示したように、「小」用の洗浄水を流す際に、操作ハンドル100を回した状態で保持する「ホールド」操作を必要とするものもある。
【0040】
図15は、市場に出回っている各種のロータンクの洗浄モードの典型的なものをまとめた一覧表である。
すなわち、同図には、代表的な6種類の洗浄モードを表した。例えば、「洗浄モード1」の場合、「大」の洗浄水を流すためには、操作ハンドル100をCW(時計回り)に約1秒間回転させる。また、「小」の洗浄水を流すためには、操作ハンドル100を反時計回り(CCW)に約1秒間回転させる。
また、例えば「洗浄モード5」における「小洗浄」の場合、操作ハンドル100を反時計回りに約4秒間、回転させた状態にする。これは、いわゆる「ホールドモード」であり、ロータンク200の小洗浄水用の排水バルブを約4秒間、開けた状態に保持させる動作に対応する。
【0041】
以上説明したような多種多様な既存のロータンクに便器洗浄システムを適合させるためには、それぞれのロータンクの構造に応じて、操作ハンドル100(シャフト82)の回転方向や回転角度、ホールドの有無などの動作モードを設定する必要がある。
【0042】
本実施形態においては、モータユニット10をロータンクに取り付けた後の、初期設定に際して、操作ハンドル100を手動操作することにより、そのロータンクに適した動作モードを自動的に設定することが可能となる。
【0043】
図16は、本発明の便器洗浄システムの設定モードを例示するフローチャートである。
【0044】
すなわち、設定モードに入った後に、まず、使用者(設定者)は、操作ハンドル100を手動操作して「大洗浄」を実行する(ステップS21)。この時、図7及び図8に関して前述したように、V11とV12の電位をモニタすることによって操作ハンドル100の回転方向を検出できる(ステップS22)。この検出結果に基づき、「大洗浄」の回転方向などの動作パラメータを設定し記憶部528に格納する(ステップS23)。
しかる後に、使用者(設定者)は、操作ハンドル100を手動操作して「小洗浄」を実行する(ステップS24)。この時も、図7及び図8に関して前述したように、V11とV12の電位を適宜モニタすることによって操作ハンドル100の回転方向と回転時間(例えば、図7及び図8の時間T)を検出する(ステップS25)。この際に、回転時間を検出することにより、ホールド(図14及び図15参照)の有無を検出できる。この検出結果に基づき、「小洗浄」の動作パラメータを設定し記憶部528に格納する(ステップS26)。
なお、ステップS21及びS22と、ステップS23及びS24の順序は、逆転させてもよい。つまり、「小洗浄」の設定を実施した後に、「大洗浄」の設定を実施してもよい。
【0045】
また、ステップS23、S26における動作パラメータは、検出した回転方向や回転時間をそのまま動作パラメータとして設定してもよく、または、これらの検出値に所定の調整をして動作パラメータとしてもよい。またあるいは、図17に例示した如く、予め格納部528に複数の洗浄モード1、2、・・・の動作パラメータを格納しておき、ステップS22、S25において検出された回転方向や回転時間などの結果に基づいて、これら複数の洗浄モードのうちで最適なものを選択(図17の具体例では「洗浄モード2」)して設定するようにしてもよい。
【0046】
以上説明したように、設定モードにおいて操作ハンドル100を手動操作し、その回転方向や回転時間を検出することにより、ロータンクに適合した動作モードを自動的に設定することが可能となる。操作ハンドル100の回転方向や回転時間などの動作パラメータは記憶部528に格納される。これらパラメータを格納するためには、E2PROMなどの不揮発性メモリを用いることが望ましい。
【0047】
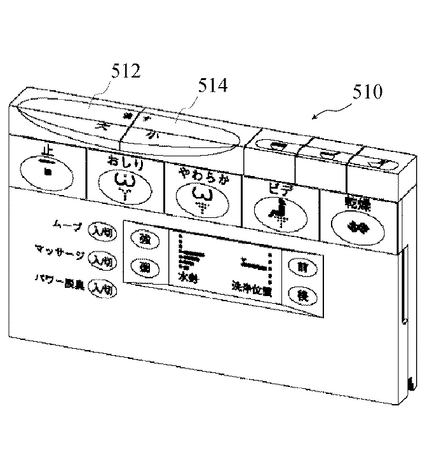
以上説明した設定モードは、モータユニット10をロータンク200に取り付けた後の初期設定作業として実行することができる。
例えば、図18に例示したリモコンユニット510の大洗浄スイッチ512と小洗浄スイッチ514を両方とも5秒以上押した時に、設定モードに入るようにすることができる。そして、設定モードに入ったら、リモコンユニット510あるいはコントローラ520から「ピッ!」という確認音を出して使用者(設定者)に大洗浄の手動操作(ステップS21)を促し、その設定後、「ピッピッ!」という確認音を出して使用者(設定者)に小洗浄の手動操作(ステップS23)の実施を促すようにすることができる。また、これら確認音の代わりに、音声ROMなどを利用して、「大洗浄を実施してください。」あるいは「小洗浄を実施してください。」などのアナウンス音声を再生してもよい。
【0048】
次に、本発明の便器洗浄システムにおいて実施可能な学習モードについて説明する。
例えば、「小洗浄」にホールドモードが設けられているロータンクの場合、使用者によって好みのホールドの時間が異なることがある。従って、設定者により初期設定が実施された後に、その便器洗浄システムが別の使用者により使用された時に、「小洗浄」のホールド時間を自動的に修正できると便利である。
【0049】
図19は、「小洗浄」のホールド時間を自動修正する学習モードを表すフローチャートである。
すなわち、操作ハンドル100を用いて手動操作により小洗浄が実施(ステップS31)されたら、図7及び図8に関して前述したように、その回転時間を検出する(ステップS32)。そして、この検出結果に基づき、「小洗浄」のホールド時間の設定値を修正する(ステップS33)。
このような学習モードは、手動操作が実施された度に実行してもよく、または、手動操作の頻度に応じて適宜実行するようにしてもよい。
【0050】
本具体例によれば、使用者が操作ハンドル100を用いて好みのホールド時間の「小洗浄」を実施すると、便器洗浄システムがそのホールド時間を再現した自動洗浄を実施するので、使用感に優れたシステムを実現できる。
【0051】
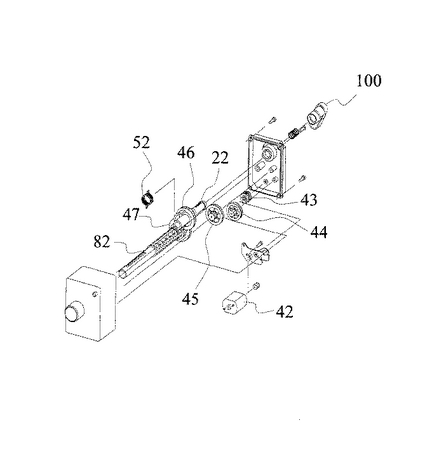
図20は、本発明において用いることができるモータユニット10の具体例を表す斜視組立図である。
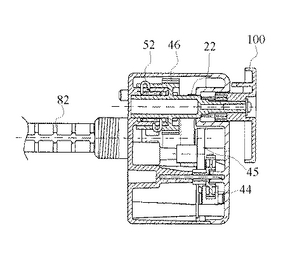
また、図21はその縦断面図であり、図22はその横断面図である。
【0052】
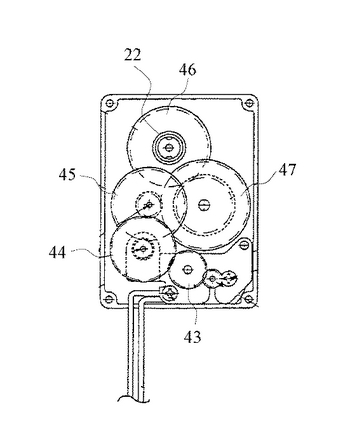
また、図23は、本具体例に内蔵されたギアの配置関係を表す正面図である。
【0053】
このモータユニット10は、図2に表した構成を具体化したものであり、駆動源であるモータ42と、減速手段4して5段のギア43〜47が設けられている。5段目のギア47の回転トルクが、シャフト82に出力される。モータ42として、DC24ボルトで動作するブラシ型の高速モータを用いた場合、1段目から5段目までの減速比は、例えば1/100程度とすることができる。また、4段目のギア46のシャフト22には操作ハンドル100が取り付けられ、モータ42と直結している。つまり、操作ハンドル100を手動操作すると、その回転がそのままモータ42に伝達される。この際にモータ42の逆起電力を検出することによって、手動操作を検出することができる。
なお、前述したように、本発明においては、モータ42と操作ハンドル100とは必ずしも常に直結されている必要はなく、操作ハンドル100の回転ストロークのうちの一部のみにおいてモータ42と結合されるようにしてもよい。
【0054】
図24は、モータ42の出力に設けられたクラッチ機構を例示する模式断面である。同図については、図2に関して前述したものに対応する要素に同一の符号を付した。
すなわち、4段目のギア46の内心にシャフト22が配置されている。シャフト22は、操作ハンドル100及び5段目のギア47に結合されている。そして、これらシャフト22の外面とギア46の内面には、凸部22P、46Pがそれぞれ設けられている。
図24は、中立状態を表し、モータ42により駆動させる際には、図24に表した中立状態からギア46が矢印の方向に空転し、その凸部46Pがシャフト22の凸部22Pに当接すると、シャフト22に結合されてトルクが出力軸に伝達される。つまり、凸部46Pが凸部22Pに当接するまでの範囲が空転角として設けられている。
【0055】
一方、図24に表した中立状態から矢印の方向にシャフト22(すなわち操作ハンドル100)を回転させた場合、その凸部22Pがギア46の凸部46Pと当接するまでの範囲においては、ギア46から独立に回転させることができる。つまり、この範囲においては、シャフト22は、モータ42のコギングトルクの負荷を受けることなく、回転させることができる。このようにして、操作ハンドル100による手動操作を軽快に行うことができる。
【0056】
そして、操作ハンドル100をさらに回転させると、「大洗浄」や「小洗浄」の所定の回転角度の範囲内において、凸部22Pと凸部46Pとが当接し、その後はモータ42を回転させつつストロークの終端に至る。つまり、「大洗浄」や「小洗浄」のための操作ハンドル100の回転ストロークの一部のみに対応してモータ42を回転させる。この時の逆起電力を検出することにより、手動操作を検出できる。
【0057】
図25及び図26は、モータユニット10と、便座400に内蔵されたコントローラ520との接続を例示する模式図である。
【0058】
すなわち、便器300の上に設けられた便座400の背面に接続口402が設けられている。そして、ロータンク200の中に収容されたモータユニット10に接続された接続コード76は、ロータンク200の背面に設けられた空気抜き穴290から引き出され、コードフック98により適宜固定され、その先端の接続プラグ78が便座400の接続口402に接続される。
【0059】
便座400には、コントローラ520が内蔵され、例えば、DC24ボルトの駆動信号を適宜供給することより、モータユニット10の動作を適宜制御することができる。また、その信号の出力端ノードに検出回路を接続することにより、逆起電力による回生電流を検出して手動操作を検出できる。
【0060】
図27は、いわゆる「前ハンドル型」のロータンクに本実施形態の便器洗浄システムを取り付けた状態を例示する斜視図である。
また、図28は、このロータンクの内部を上方から眺めた模式図である。
【0061】
「前ハンドル型」のロータンクの場合、ストロークの長いレバー87を介して排水バルブ240を引き上げるため、モータユニット10のシャフト72の回転ストロークは小さい。このような場合でも、本発明によれば、操作ハンドル100を手動操作することによりモータに生ずる逆起電力を確実に検出し、待機時間の設定や動作モードの設定などを確実に実施させることができる。
【0062】
以上、具体例を参照しつつ本発明の実施の形態について説明した。しかし、本発明はこれら具体例に限定されるものではない。
【0063】
例えば、モータユニット10の外形状、サイズ、内蔵するモータの種類、減速手段が有するギアの数やそれらの減速比、あるいはこれらの配置関係などについては、当業者が適宜設計変更を加えたものも本発明の範囲に包含される。
また、コントローラ520の具体的な構造や操作手順、格納する洗浄モードの種類などについては、当業者が適宜設計変更を加えたものも、本発明の要旨を備える限り、本発明の範囲に包含される。
【0064】
その他、本発明の便器洗浄システムを構成する要素について当業者が設計変更を加えたものであっても、本発明の要旨を備えたものであれば、本発明の範囲に包含される。
【図面の簡単な説明】
【0065】
【図1】本発明の実施の形態にかかる便器洗浄システムを取り付けた水洗便器を例示した概念図である。
【図2】モータユニット10の内部構造を模式的に表した概念図である。
【図3】コントローラ520の要部構成を例示するブロック図である。
【図4】制御部522の回路構成を例示する模式図である。
【図5】手動操作に伴う逆起電力の作用を表した模式図である。
【図6】手動操作に伴う逆起電力の作用を表した模式図である。
【図7】操作ハンドル100を手動操作した時の電位V11、V12及び放出水量の変化を例示するタイミングチャートである。
【図8】操作ハンドル100を手動操作した時の電位V11、V12及び放出水量の変化を例示するタイミングチャートである。
【図9】本発明の便器洗浄システムにおいて実行される処理の一例を表すフローチャートである。
【図10】待機時間(S秒間)を可変とした処理の一例を表すフローチャートである。
【図11】既存のロータンクの形態のいくつかを例示する模式図である。
【図12】「小」用の洗浄水を流す際に、「大」用の洗浄水を流す場合と同方向に操作ハンドル100を回すものを表す模式図である。
【図13】「小」と「大」で、互いに逆に回すものを表す模式図である。
【図14】「小」用の洗浄水を流す際に、操作ハンドル100を回した状態で保持する「ホールド」操作を必要とするものを表す模式図である。
【図15】市場に出回っている各種のロータンクの洗浄モードの典型的なものをまとめた一覧表である。
【図16】本発明の便器洗浄システムの設定モードを例示するフローチャートである。
【図17】予め格納部528に複数の洗浄モード1、2、・・・の動作パラメータを格納しておき、これら複数の洗浄モードのうちで最適なものを選択する態様を表す模式図である。
【図18】リモコンユニット510を例示する斜視図である。
【図19】「小洗浄」のホールド時間を自動修正する学習モードを表すフローチャートである。
【図20】本発明において用いることができるモータユニット10の具体例を表す斜視組立図である。
【図21】モータユニット10の縦断面図である。
【図22】モータユニット10の横断面図である。
【図23】モータユニットに内蔵されたギアの配置関係を表す正面図である。
【図24】モータ42の出力に設けられたクラッチ機構を例示する模式断面である。
【図25】モータユニット10と、便座400に内蔵されたコントローラ520との接続を例示する模式図である。
【図26】モータユニット10と、便座400に内蔵されたコントローラ520との接続を例示する模式図である。
【図27】いわゆる「前ハンドル型」のロータンクに本実施形態の便器洗浄システムを取り付けた状態を例示する斜視図である。
【図28】図27のロータンクの内部を上方から眺めた模式図である。
【符号の説明】
【0066】
10 モータユニット
22 シャフト
22P 凸部
42 モータ
43〜47 ギア
46P 凸部
52 シャフトリターンスプリング
72 シャフト
76 接続コード
78 接続プラグ
82 シャフト
84 玉鎖レバー
87 レバー
98 コードフック
100 操作ハンドル
200 ロータンク
220 玉鎖
240 排水バルブ
300 便器
400 便座
402 接続口
510 リモコンユニット
512 大洗浄スイッチ
514 小洗浄スイッチ
520 コントローラ
522 制御部
524 駆動部
526 検出部
528 格納部
528 記憶部
Ir 回生電流
R1、R2 検出抵抗
【技術分野】
【0001】
本発明は、便器洗浄システムに関し、より詳細には、水洗便器に取り付けて、手動及び電動によりロータンクから水洗便器に洗浄水を供給可能とした便器洗浄システムに関する。
【背景技術】
【0002】
手動及び電動のいずれにても水洗便器に洗浄水を供給可能としたモータユニットとして、ロータンクのレバー装置が開示されている(特許文献1)。このレバー装置は、モータを内蔵したスピンドル電動装置をロータンクの内部に収容可能とし、且つロータンクのレバー開口からロータンク外の突出するねじ付カラムを設けたものである。このねじ付きカラムにロータンクの外側からナットを螺合させ、スピンドル電動装置の基端部との間にロータンクの外壁を強く挟持することにより、スピンドル電動装置を固定可能とした。かかる構成により、レバー装置の取り付けが容易となり、さらにレバーとロータンクとの隙間を、旧来の手回し式のロータンクのものと変わらない程度まで抑え、見栄えを良くすることができる。
【特許文献1】特開2001−65028号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、このような便器洗浄システムにおいて、操作ハンドルを用いた手動操作が実行されたことをコントローラが認識できると便利である。例えば、手動操作による洗浄の後、ロータンクに十分に水が溜まらない状態で自動洗浄が実行されると、水量が不足するために十分な洗浄効果が得られない。このため、ふたたびロータンク内に洗浄水が満たされるまで待ってから改めて洗浄を実行しなければならず、使い勝手や水資源の節約の観点から改善の余地がある。
【0004】
また、水洗便器の形式に応じて、その最適水量は異なる場合が多い。これに対して、例えばモータユニットに可変抵抗などを設けて開閉バルブの開度あるいは開時間を調節する手段も考えられる。しかし、この場合には、可変抵抗を調節して洗浄水の水量の確認するという調整作業を数回以上繰り返さなければならず、使い勝手がよいとはいえない。
【0005】
本発明はかかる課題の認識に基づいてなされたものであり、その目的は、簡単な構成で手動操作を検出可能とし、自動洗浄動作に対してフィードバック可能とした便器洗浄システムを提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の一態様によれば、
排水バルブを引き上げることによりロータンク内の水を排出させる引き上げ部と、
前記引き上げ部の前記引き上げの動作を実行させるモータと、
前記引き上げ部の前記引き上げの動作を実行させる手動操作ハンドルと、
前記手動操作ハンドルを操作した時に前記モータの駆動軸に生ずる回転を検出する検出部と、
を備えたことを特徴とする便器洗浄システムが提供される。
【0007】
上記構成によれば、モータの駆動軸に生ずる回転を検出することにより手動操作を検出可能とし、モータによる自動動作に対してフィードバック可能とすることができる。
【0008】
ここで、前記モータの前記駆動軸と、前記手動操作ハンドルと、が減速手段を介して連動するものとすれば、手動操作ハンドルの操作に応じてモータの駆動軸が回転するので、手動操作の検出を確実且つ容易にすることができる。
【0009】
また、前記モータの駆動軸と、前記手動操作ハンドルと、は、前記引き上げ部の前記引き上げの動作を実行させるために必要なストロークの少なくとも一部において連動するものとすれば、例えは、空転領域を設けることにより、モータのコギングトルクなどを受けずに手動操作できる角度範囲を設けて軽快な操作が可能となる。
【0010】
また、前記手動操作ハンドルを操作した時に前記モータの駆動軸に生ずる前記回転を前記検出部が検出すると、その後、所定の時間の間は前記モータによる前記引き上げ動作の要求があっても前記モータによる前記引き上げの動作を実行しないものとすれば、手動操作による洗浄後、ロータンク内に水が十分に満たされない状態で自動洗浄を実施することを防ぐことができる。
【0011】
また、前記所定の時間の間に前記モータによる前記引き上げ動作の要求があった場合に、前記所定の時間の経過後に実行するものすれば、手動操作による洗浄の後、ロータンクに水が充填された後に確実に自動洗浄できる。
【0012】
また、前記所定の時間は、前記手動操作ハンドルの操作方向に応じて異なるものとすれば、例えば、手動操作により「大洗浄」が実施された場合と「小洗浄」が実施された場合とで、待機時間を可変とし、いずれの場合もロータンク内に水が充填された最適なタイミングで自動洗浄を実施できる。
【0013】
また、前記手動操作ハンドルを操作した時に前記検出部が検出する結果に基づいて前記手動操作ハンドルの回転方向及び回転時間の少なくともいずれかを判定し、その判定結果に基づいて、前記モータによる前記引き上げ動作の条件を決定するものとすれば、ロータンクの形式に応じて最適な動作モードを確実且つ容易に設定でき、また、使用者の好みのホールド時間などを学習させて自動洗浄にフィードバックさせることにより、使用感に優れた便器洗浄システムを実現できる。
【発明の効果】
【0014】
本発明によれば、手動操作を検出する機能を付加することにより、手動洗浄後の自動洗浄を最適なタイミングで実施し、ロータンクの形式に応じて最適な動作モードを確実且つ容易に設定でき、また、使用者の好みの時間のホールド動作を学習させることができる。 その結果として、ユーザは、ロータンクを買い換えることなく電動洗浄の恩恵に浴することができる。
【発明を実施するための最良の形態】
【0015】
以下、図面を参照しつつ本発明の実施の形態について説明する。
図1は、本発明の実施の形態にかかる便器洗浄システムを取り付けた水洗便器を例示した概念図である。
本発明の便器洗浄システムは、モータユニット10と、これを制御するコントローラ520と、を有する。コントローラ520は、モータユニット10に内蔵してもよく、または、モータユニット10とは別体のユニットとしてもよい。
図1の具体例の場合、コントローラ520は、便座400の後方(ロータンク200に近い側)に設けられている。便座400は、例えば、人体臀部を洗浄するための温水を噴出可能なノズルなどを内蔵してもよい。モータユニット10の動作は、コントローラ520に設けられた操作スイッチ(図示せず)により制御してもよく、または、リモコンユニット510により制御してもよい。リモコンユニット510とコントローラ520との間の通信は、例えば、赤外線や電波などにより実行させることができる。
【0016】
モータユニット10は、モータを内蔵し、水洗便器システムのロータンク200に取り付けられている。モータユニット10のシャフト82の先端には、玉鎖レバー84、85が適宜設けられている。シャフト82が矢印Aあるいは矢印Bの方向に回転すると、玉鎖220、230を介して排水バルブ240、250を引き上げ、便器300に洗浄水を流すことができる。シャフト82の回転動作は、モータユニット10に内蔵されたモータにより実行させることができる。また、モータユニット10には、操作ハンドル100が取り付けられ、これを用いた手動操作によっても、シャフト82を回転させて洗浄水を便器300に流すことができる。
【0017】
図2は、モータユニット10の内部構造を模式的に表した概念図である。なお、同図は、動力伝達関係を説明するための概念図であり、各要素の寸法や配置関係などは、必ずしも実際の通りとは限らない。
本具体例のモータユニット10の内部には、駆動源であるモータ42と、減速手段4して5段のギア43〜47が設けられている。5段目のギア47の回転トルクが、シャフト82に出力される。モータ42として、DC24ボルトで動作するブラシ型の高速モータを用いた場合、1段目から5段目までの減速比は、例えば1/100程度とすることができる。
【0018】
また、4段目のギア46のシャフト22には操作ハンドル100が取り付けられ、手動操作による洗浄も可能とされている。なお、操作ハンドル100は、5段目のギアにシャフト82と同軸に取り付けてもよい。
【0019】
さらに、シャフト22には、シャフトリターンスプリング52が設けられ、中立状態に付勢される。
【0020】
このモータユニット10の場合、モータ42と操作ハンドル100とはギア43〜46を介して連動する。つまり、操作ハンドル100を手動により回転させると、それに対応してモータ42の回転軸も回転する。後に詳述するように、本発明においては、このような手動操作に伴うモータ42の逆起電力を検出することによって、手動操作を検知することができる。
なお、本発明においては、モータ42と操作ハンドル100とは必ずしも常に直結されている必要はなく、操作ハンドル100の回転ストロークのうちの一部のみにおいてモータ42と結合されるようにしてもよい。例えば、後に詳述するように、クラッチ機構などを設け、操作ハンドル100は中立付近においてはモータ42とは結合されておらず、洗浄に際して操作ハンドル100を所定の角度以上回転させた時に、モータ42と結合されてその回転軸を回転させるようにしてもよい。このようにすると、手動操作の際に、モータ42のコギングトルクの負荷を減らして操作ハンドル100を軽い力で操作できる。
【0021】
図3は、コントローラ520の要部構成を例示するブロック図である。
すなわちコントローラ520は、制御部522と、駆動部524と、検出部526と、記憶部528と、を有する。制御部522は、CPU(central processing unit)を備え、コントローラ520の各部の動作を制御する。駆動部524は、制御部522からの制御信号に応じてモータユニット10に駆動信号を出力する。検出部526は、操作ハンドル100を介して手動操作した時にモータユニット10から出力される信号を検出する。
【0022】
記憶部528は、手動操作の有無や動作モードなどに関する情報を制御部522からの制御により適宜記憶する。記憶部528としては、その格納すべき情報の種類に応じて、例えば、DRAM(dynamic random access memory)や、SRAM(static random access memory)、E2PROM(electrically erasable programmable read only memory)などのフラッシュメモリなどを適宜選択して用いることができる。また、これら2種類以上のメモリを併せ持つようにしてもよい。
【0023】
図4は、制御部522の回路構成を例示する模式図である。
すなわち、モータユニット10に内蔵されたモータ42の動作は、4つのスイッチング素子Tr1〜Tr4により制御できる。例えば、スイッチング素子Tr1とTr4をオンにし、Tr2とTr3をオフにすると、直流モータ42を所定の方向に回転させ、スイッチング素子Tr2とTr3をオンにし、Tr1とTr4をオフにすると、モータ42をこれとは逆の方向に回転させることができる。制御部522のCPUは、これらスイッチング素子Tr1〜Tr4の動作を出力VO1〜VO4によりそれぞれ制御できる。
【0024】
そして、モータ42への出力端ノードに検出抵抗R1、R2をそれぞれ接続し、この電位をV11、V12としてCPUに取り込むことにより、手動操作に伴うモータ42の回転を検出できる。
【0025】
図5及び図6は、手動操作に伴う逆起電力の作用を表した模式図である。
すなわち、図2に関して前述したように、本発明においては、操作ハンドル100とモータ42とが、少なくとも手動操作ストロークの一部において直結されるので、操作ハンドル100を手動により回転させると、モータ42の回転軸も回転する。すると、モータ42において逆起電力が生じ、その回転方向に対応して、図5及び図6に例示した如く回生電流Irが流れる。例えば、図5に例示したように、逆起電力による回生電流IrがダイオードD3、モータ42、ダイオードD2の方向に流れた時には、検出抵抗R1の両端で電位Vrが生ずる。従って、V11の電位をモニタすることにより、モータ42の逆起電力を検出できる。
同様に、図6に例示したように、逆起電力による回生電流IrがダイオードD4、モータ42、ダイオードD1の方向に流れた時には、検出抵抗R2の両端で電位Vrが生ずる。従って、V12の電位をモニタすることにより、モータ42の逆起電力を検出できる。
【0026】
このように、モータ42の出力端ノードに検出抵抗R1、R2を接続し、その電位をモニタすることにより、手動操作の有無を検出できる。
【0027】
図7及び図8は、操作ハンドル100を手動操作した時の電位V11、V12及び放出水量の変化を例示するタイミングチャートである。
すなわち、図7に表したように、操作ハンドル100を中立位置から半時計回りに回転させた場合、回転動作に対応してV11に回生電流による電位Vrが生ずる。所定時間の経過後、操作ハンドル100を時計回りに回転させて再び中立位置に戻す時には、その回転動作に対応してV12に電位Vrが生ずる。
また、操作ハンドル100の操作に伴い、ロータンクの排水バルブが開かれて、便器に洗浄水が流される。その積算水量は、操作ハンドル100を中立位置に戻すまでの時間に応じて増加する。
【0028】
操作ハンドル100を反対方向に回転させた場合についても、図8に例示した如く、V12、V11に電位がそれぞれ生じ、便器に洗浄水が流される。
【0029】
以上説明したように、本発明においては、操作ハンドル100を手動操作する時にモータ42に生ずる回生電流を検出することにより、手動操作の有無や、その回転方向、操作ハンドル100を回転させた状態から中立位置に戻すまでの時間などを検出できる。本発明においては、これらの検出結果に基づいて、自動洗浄の可否判断や動作モードの設定などを実施できる。
【0030】
図9は、本発明の便器洗浄システムにおいて実行される処理の一例を表すフローチャートである。
本具体例においては、操作ハンドル100を用いた手動洗浄が実施された後、ロータンクに再び水が満たされるまでの所定の待機時間(S秒間)の間は、自動洗浄の実行を保留する。すなわち、手動洗浄を検出(ステップS11)した後に、例えば、リモコンユニット510(図1参照)が操作されて自動洗浄の命令が出された(ステップS12)場合、手動洗浄からS秒間が経過したか否かが判断される(ステップS13)。このS秒間は、ロータンクに水を充填するために必要とされる時間、あるいはこれに所定の調整時間を加算あるいは減算した時間とすることができる。
手動洗浄からS秒間が経過しない時(ステップS13:NO)は、経過するまで待機する。そして、S秒間が経過すると、自動洗浄を実行する(ステップS14)。
【0031】
このようにすれば、操作ハンドル100を用いた手動洗浄が実行された後に、ロータンクに水が充填されない状態で自動洗浄が実行されることを防ぐことができる。その結果として、不十分な水量の自動洗浄が実行されてしまい、その後、再びロータンクに水が充填されるのを待ってもう一度自動洗浄を実施するという煩雑さを解消し、水資源の節約にも資することができる。
【0032】
図10は、待機時間(S秒間)を可変とした処理の一例を表すフローチャートである。
【0033】
すなわち、本具体例においては、操作ハンドル100を用いた手動洗浄を検出する(ステップS11)と、その検出データから待機時間(S秒間)を算出する。これは、例えば、図7及び図8に関して前述したように、操作ハンドル100を中立位置から回転させ、再び中立位置に戻す際に、V11、V12にそれぞれ電位Vrが表れることから判定できる。例えば、図7及び図8において、V11とV12に電位Vrが表れる時間間隔Tから放出水量を推定できる。このようにして推定した放出水量から、ロータンクに再び水が充填されるまでの時間を算出し、この算出結果に基づいて、待機時間(S秒間)を決定できる。
【0034】
また一方、例えば、ロータンクの構造によっては、操作ハンドル100の右回転で「大洗浄」、左回転で「小洗浄」が実施される場合がある。このような場合に、図7及び図8に関して前述したように、V11、V12の電位を適宜モニタすることにより操作ハンドル100の回転方向を検出し、「大洗浄」が実施された場合には、第1の待機時間(S秒間)を設定し、「小洗浄」が実施された場合には、第2の待機時間(S秒間)を設定するようにしてもよい。この場合、第1及び第2の待機時間は、それぞれ、「大洗浄」、「小洗浄」が実施された後に、ロータンクが水で充填されるまでの時間に基づいて決定される。
【0035】
以上説明したように、図10に例示したフローチャートによれば、操作ハンドル100を用いた手動操作により流された洗浄水の量に応じて待機時間(S秒間)を可変とする。このようにすれば、例えば、手動操作により「小洗浄」が実施された場合には、短時間で再びロータンクが水で充填され、これに対応して直ちに自動洗浄を実行でき、一方、手動操作で「大洗浄」が実行された場合には、ロータンクが再び水で充填されるまで待機してから自動洗浄を実行できる。
【0036】
以上、手動操作が実施された後に、所定の待機時間を設ける具体例について説明した。
【0037】
次に、操作ハンドルを手動操作することにより、便器洗浄システムの動作モードを設定可能とした具体例について説明する。まず、ロータンクの形式に対応して、便器洗浄システムの動作モードを変える必要がある点について説明する。
図11は、既存のロータンクの形態のいくつかを例示する模式図である。すなわち、同図(a)に表したものは、ロータンク200の正面左側に操作ハンドル100が設けられた、いわゆる「前ハンドル型」のロータンクである。また、図11(b)に表したものは、ロータンク200の向かって右側側面に操作ハンドル100が設けられた、いわゆる「右ハンドル型」のロータンクである。一方、図11(c)に表したものは、手洗い室のコーナーに配置可能な、いわゆる「隅付き型」のロータンクである。
【0038】
これらの具体例からも分かるように、ロータンク200の形状とその操作ハンドル100の取り付け位置だけを見ても、各種の形式が存在する。そしてさらに、その大小の洗浄水の流し分けの機構についてみると、さらに多種多様なモードが存在する。
【0039】
例えば、「大」用の洗浄水を流す際に、操作ハンドル100を右側に回転させるものと、左側に回転させるものが存在する。また、図12に例示したように、「小」用の洗浄水を流す際に、「大」用の洗浄水を流す場合と同方向に操作ハンドル100を回すものと、図13に表したように、互いに逆に回すものがある。
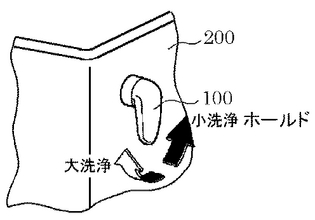
またさらに、図14に例示したように、「小」用の洗浄水を流す際に、操作ハンドル100を回した状態で保持する「ホールド」操作を必要とするものもある。
【0040】
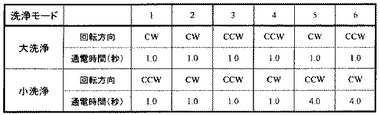
図15は、市場に出回っている各種のロータンクの洗浄モードの典型的なものをまとめた一覧表である。
すなわち、同図には、代表的な6種類の洗浄モードを表した。例えば、「洗浄モード1」の場合、「大」の洗浄水を流すためには、操作ハンドル100をCW(時計回り)に約1秒間回転させる。また、「小」の洗浄水を流すためには、操作ハンドル100を反時計回り(CCW)に約1秒間回転させる。
また、例えば「洗浄モード5」における「小洗浄」の場合、操作ハンドル100を反時計回りに約4秒間、回転させた状態にする。これは、いわゆる「ホールドモード」であり、ロータンク200の小洗浄水用の排水バルブを約4秒間、開けた状態に保持させる動作に対応する。
【0041】
以上説明したような多種多様な既存のロータンクに便器洗浄システムを適合させるためには、それぞれのロータンクの構造に応じて、操作ハンドル100(シャフト82)の回転方向や回転角度、ホールドの有無などの動作モードを設定する必要がある。
【0042】
本実施形態においては、モータユニット10をロータンクに取り付けた後の、初期設定に際して、操作ハンドル100を手動操作することにより、そのロータンクに適した動作モードを自動的に設定することが可能となる。
【0043】
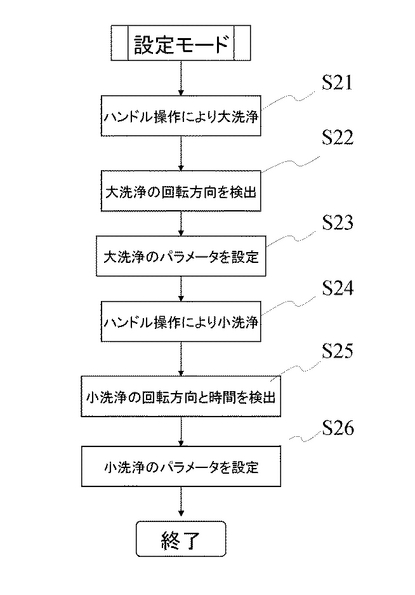
図16は、本発明の便器洗浄システムの設定モードを例示するフローチャートである。
【0044】
すなわち、設定モードに入った後に、まず、使用者(設定者)は、操作ハンドル100を手動操作して「大洗浄」を実行する(ステップS21)。この時、図7及び図8に関して前述したように、V11とV12の電位をモニタすることによって操作ハンドル100の回転方向を検出できる(ステップS22)。この検出結果に基づき、「大洗浄」の回転方向などの動作パラメータを設定し記憶部528に格納する(ステップS23)。
しかる後に、使用者(設定者)は、操作ハンドル100を手動操作して「小洗浄」を実行する(ステップS24)。この時も、図7及び図8に関して前述したように、V11とV12の電位を適宜モニタすることによって操作ハンドル100の回転方向と回転時間(例えば、図7及び図8の時間T)を検出する(ステップS25)。この際に、回転時間を検出することにより、ホールド(図14及び図15参照)の有無を検出できる。この検出結果に基づき、「小洗浄」の動作パラメータを設定し記憶部528に格納する(ステップS26)。
なお、ステップS21及びS22と、ステップS23及びS24の順序は、逆転させてもよい。つまり、「小洗浄」の設定を実施した後に、「大洗浄」の設定を実施してもよい。
【0045】
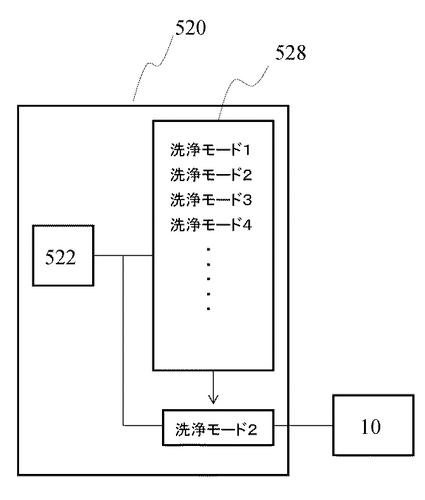
また、ステップS23、S26における動作パラメータは、検出した回転方向や回転時間をそのまま動作パラメータとして設定してもよく、または、これらの検出値に所定の調整をして動作パラメータとしてもよい。またあるいは、図17に例示した如く、予め格納部528に複数の洗浄モード1、2、・・・の動作パラメータを格納しておき、ステップS22、S25において検出された回転方向や回転時間などの結果に基づいて、これら複数の洗浄モードのうちで最適なものを選択(図17の具体例では「洗浄モード2」)して設定するようにしてもよい。
【0046】
以上説明したように、設定モードにおいて操作ハンドル100を手動操作し、その回転方向や回転時間を検出することにより、ロータンクに適合した動作モードを自動的に設定することが可能となる。操作ハンドル100の回転方向や回転時間などの動作パラメータは記憶部528に格納される。これらパラメータを格納するためには、E2PROMなどの不揮発性メモリを用いることが望ましい。
【0047】
以上説明した設定モードは、モータユニット10をロータンク200に取り付けた後の初期設定作業として実行することができる。
例えば、図18に例示したリモコンユニット510の大洗浄スイッチ512と小洗浄スイッチ514を両方とも5秒以上押した時に、設定モードに入るようにすることができる。そして、設定モードに入ったら、リモコンユニット510あるいはコントローラ520から「ピッ!」という確認音を出して使用者(設定者)に大洗浄の手動操作(ステップS21)を促し、その設定後、「ピッピッ!」という確認音を出して使用者(設定者)に小洗浄の手動操作(ステップS23)の実施を促すようにすることができる。また、これら確認音の代わりに、音声ROMなどを利用して、「大洗浄を実施してください。」あるいは「小洗浄を実施してください。」などのアナウンス音声を再生してもよい。
【0048】
次に、本発明の便器洗浄システムにおいて実施可能な学習モードについて説明する。
例えば、「小洗浄」にホールドモードが設けられているロータンクの場合、使用者によって好みのホールドの時間が異なることがある。従って、設定者により初期設定が実施された後に、その便器洗浄システムが別の使用者により使用された時に、「小洗浄」のホールド時間を自動的に修正できると便利である。
【0049】
図19は、「小洗浄」のホールド時間を自動修正する学習モードを表すフローチャートである。
すなわち、操作ハンドル100を用いて手動操作により小洗浄が実施(ステップS31)されたら、図7及び図8に関して前述したように、その回転時間を検出する(ステップS32)。そして、この検出結果に基づき、「小洗浄」のホールド時間の設定値を修正する(ステップS33)。
このような学習モードは、手動操作が実施された度に実行してもよく、または、手動操作の頻度に応じて適宜実行するようにしてもよい。
【0050】
本具体例によれば、使用者が操作ハンドル100を用いて好みのホールド時間の「小洗浄」を実施すると、便器洗浄システムがそのホールド時間を再現した自動洗浄を実施するので、使用感に優れたシステムを実現できる。
【0051】
図20は、本発明において用いることができるモータユニット10の具体例を表す斜視組立図である。
また、図21はその縦断面図であり、図22はその横断面図である。
【0052】
また、図23は、本具体例に内蔵されたギアの配置関係を表す正面図である。
【0053】
このモータユニット10は、図2に表した構成を具体化したものであり、駆動源であるモータ42と、減速手段4して5段のギア43〜47が設けられている。5段目のギア47の回転トルクが、シャフト82に出力される。モータ42として、DC24ボルトで動作するブラシ型の高速モータを用いた場合、1段目から5段目までの減速比は、例えば1/100程度とすることができる。また、4段目のギア46のシャフト22には操作ハンドル100が取り付けられ、モータ42と直結している。つまり、操作ハンドル100を手動操作すると、その回転がそのままモータ42に伝達される。この際にモータ42の逆起電力を検出することによって、手動操作を検出することができる。
なお、前述したように、本発明においては、モータ42と操作ハンドル100とは必ずしも常に直結されている必要はなく、操作ハンドル100の回転ストロークのうちの一部のみにおいてモータ42と結合されるようにしてもよい。
【0054】
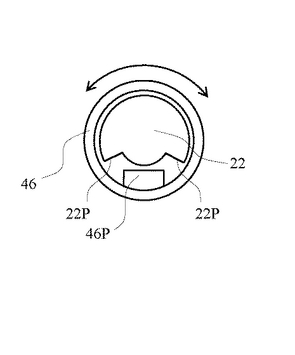
図24は、モータ42の出力に設けられたクラッチ機構を例示する模式断面である。同図については、図2に関して前述したものに対応する要素に同一の符号を付した。
すなわち、4段目のギア46の内心にシャフト22が配置されている。シャフト22は、操作ハンドル100及び5段目のギア47に結合されている。そして、これらシャフト22の外面とギア46の内面には、凸部22P、46Pがそれぞれ設けられている。
図24は、中立状態を表し、モータ42により駆動させる際には、図24に表した中立状態からギア46が矢印の方向に空転し、その凸部46Pがシャフト22の凸部22Pに当接すると、シャフト22に結合されてトルクが出力軸に伝達される。つまり、凸部46Pが凸部22Pに当接するまでの範囲が空転角として設けられている。
【0055】
一方、図24に表した中立状態から矢印の方向にシャフト22(すなわち操作ハンドル100)を回転させた場合、その凸部22Pがギア46の凸部46Pと当接するまでの範囲においては、ギア46から独立に回転させることができる。つまり、この範囲においては、シャフト22は、モータ42のコギングトルクの負荷を受けることなく、回転させることができる。このようにして、操作ハンドル100による手動操作を軽快に行うことができる。
【0056】
そして、操作ハンドル100をさらに回転させると、「大洗浄」や「小洗浄」の所定の回転角度の範囲内において、凸部22Pと凸部46Pとが当接し、その後はモータ42を回転させつつストロークの終端に至る。つまり、「大洗浄」や「小洗浄」のための操作ハンドル100の回転ストロークの一部のみに対応してモータ42を回転させる。この時の逆起電力を検出することにより、手動操作を検出できる。
【0057】
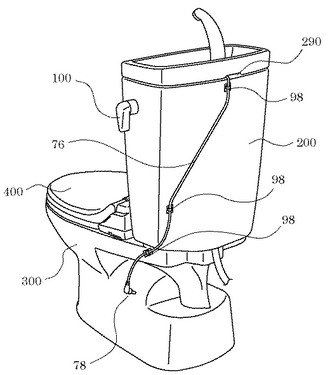
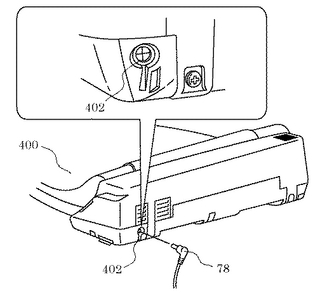
図25及び図26は、モータユニット10と、便座400に内蔵されたコントローラ520との接続を例示する模式図である。
【0058】
すなわち、便器300の上に設けられた便座400の背面に接続口402が設けられている。そして、ロータンク200の中に収容されたモータユニット10に接続された接続コード76は、ロータンク200の背面に設けられた空気抜き穴290から引き出され、コードフック98により適宜固定され、その先端の接続プラグ78が便座400の接続口402に接続される。
【0059】
便座400には、コントローラ520が内蔵され、例えば、DC24ボルトの駆動信号を適宜供給することより、モータユニット10の動作を適宜制御することができる。また、その信号の出力端ノードに検出回路を接続することにより、逆起電力による回生電流を検出して手動操作を検出できる。
【0060】
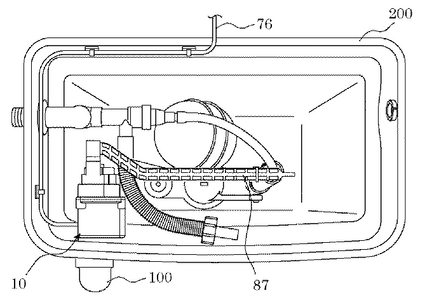
図27は、いわゆる「前ハンドル型」のロータンクに本実施形態の便器洗浄システムを取り付けた状態を例示する斜視図である。
また、図28は、このロータンクの内部を上方から眺めた模式図である。
【0061】
「前ハンドル型」のロータンクの場合、ストロークの長いレバー87を介して排水バルブ240を引き上げるため、モータユニット10のシャフト72の回転ストロークは小さい。このような場合でも、本発明によれば、操作ハンドル100を手動操作することによりモータに生ずる逆起電力を確実に検出し、待機時間の設定や動作モードの設定などを確実に実施させることができる。
【0062】
以上、具体例を参照しつつ本発明の実施の形態について説明した。しかし、本発明はこれら具体例に限定されるものではない。
【0063】
例えば、モータユニット10の外形状、サイズ、内蔵するモータの種類、減速手段が有するギアの数やそれらの減速比、あるいはこれらの配置関係などについては、当業者が適宜設計変更を加えたものも本発明の範囲に包含される。
また、コントローラ520の具体的な構造や操作手順、格納する洗浄モードの種類などについては、当業者が適宜設計変更を加えたものも、本発明の要旨を備える限り、本発明の範囲に包含される。
【0064】
その他、本発明の便器洗浄システムを構成する要素について当業者が設計変更を加えたものであっても、本発明の要旨を備えたものであれば、本発明の範囲に包含される。
【図面の簡単な説明】
【0065】
【図1】本発明の実施の形態にかかる便器洗浄システムを取り付けた水洗便器を例示した概念図である。
【図2】モータユニット10の内部構造を模式的に表した概念図である。
【図3】コントローラ520の要部構成を例示するブロック図である。
【図4】制御部522の回路構成を例示する模式図である。
【図5】手動操作に伴う逆起電力の作用を表した模式図である。
【図6】手動操作に伴う逆起電力の作用を表した模式図である。
【図7】操作ハンドル100を手動操作した時の電位V11、V12及び放出水量の変化を例示するタイミングチャートである。
【図8】操作ハンドル100を手動操作した時の電位V11、V12及び放出水量の変化を例示するタイミングチャートである。
【図9】本発明の便器洗浄システムにおいて実行される処理の一例を表すフローチャートである。
【図10】待機時間(S秒間)を可変とした処理の一例を表すフローチャートである。
【図11】既存のロータンクの形態のいくつかを例示する模式図である。
【図12】「小」用の洗浄水を流す際に、「大」用の洗浄水を流す場合と同方向に操作ハンドル100を回すものを表す模式図である。
【図13】「小」と「大」で、互いに逆に回すものを表す模式図である。
【図14】「小」用の洗浄水を流す際に、操作ハンドル100を回した状態で保持する「ホールド」操作を必要とするものを表す模式図である。
【図15】市場に出回っている各種のロータンクの洗浄モードの典型的なものをまとめた一覧表である。
【図16】本発明の便器洗浄システムの設定モードを例示するフローチャートである。
【図17】予め格納部528に複数の洗浄モード1、2、・・・の動作パラメータを格納しておき、これら複数の洗浄モードのうちで最適なものを選択する態様を表す模式図である。
【図18】リモコンユニット510を例示する斜視図である。
【図19】「小洗浄」のホールド時間を自動修正する学習モードを表すフローチャートである。
【図20】本発明において用いることができるモータユニット10の具体例を表す斜視組立図である。
【図21】モータユニット10の縦断面図である。
【図22】モータユニット10の横断面図である。
【図23】モータユニットに内蔵されたギアの配置関係を表す正面図である。
【図24】モータ42の出力に設けられたクラッチ機構を例示する模式断面である。
【図25】モータユニット10と、便座400に内蔵されたコントローラ520との接続を例示する模式図である。
【図26】モータユニット10と、便座400に内蔵されたコントローラ520との接続を例示する模式図である。
【図27】いわゆる「前ハンドル型」のロータンクに本実施形態の便器洗浄システムを取り付けた状態を例示する斜視図である。
【図28】図27のロータンクの内部を上方から眺めた模式図である。
【符号の説明】
【0066】
10 モータユニット
22 シャフト
22P 凸部
42 モータ
43〜47 ギア
46P 凸部
52 シャフトリターンスプリング
72 シャフト
76 接続コード
78 接続プラグ
82 シャフト
84 玉鎖レバー
87 レバー
98 コードフック
100 操作ハンドル
200 ロータンク
220 玉鎖
240 排水バルブ
300 便器
400 便座
402 接続口
510 リモコンユニット
512 大洗浄スイッチ
514 小洗浄スイッチ
520 コントローラ
522 制御部
524 駆動部
526 検出部
528 格納部
528 記憶部
Ir 回生電流
R1、R2 検出抵抗
【特許請求の範囲】
【請求項1】
排水バルブを引き上げることによりロータンク内の水を排出させる引き上げ部と、
前記引き上げ部の前記引き上げの動作を実行させるモータと、
前記引き上げ部の前記引き上げの動作を実行させる手動操作ハンドルと、
前記手動操作ハンドルを操作した時に前記モータの駆動軸に生ずる回転を検出する検出部と、
を備えたことを特徴とする便器洗浄システム。
【請求項2】
前記モータの前記駆動軸と、前記手動操作ハンドルと、が減速手段を介して連動することを特徴とする請求項1記載の便器洗浄システム。
【請求項3】
前記モータの駆動軸と、前記手動操作ハンドルと、は、前記引き上げ部の前記引き上げの動作を実行させるために必要なストロークの少なくとも一部において連動することを特徴とする請求項1記載の便器洗浄システム。
【請求項4】
前記手動操作ハンドルを操作した時に前記モータの駆動軸に生ずる前記回転を前記検出部が検出すると、その後、所定の時間の間は前記モータによる前記引き上げ動作の要求があっても前記モータによる前記引き上げの動作を実行しないことを特徴とする請求項1〜3のいずれか1つに記載の便器洗浄システム。
【請求項5】
前記所定の時間の間に前記モータによる前記引き上げ動作の要求があった場合に、前記所定の時間の経過後に実行することを特徴とする請求項4記載の便器洗浄システム。
【請求項6】
前記所定の時間は、前記手動操作ハンドルの操作方向に応じて異なることを特徴とする請求項4または5に記載の便器洗浄システム。
【請求項7】
前記手動操作ハンドルを操作した時に前記検出部が検出する結果に基づいて前記手動操作ハンドルの回転方向及び回転時間の少なくともいずれかを判定し、その判定結果に基づいて、前記モータによる前記引き上げ動作の条件を決定することを特徴とする請求項1〜6のいずれか1つに記載の便器洗浄システム。
【請求項1】
排水バルブを引き上げることによりロータンク内の水を排出させる引き上げ部と、
前記引き上げ部の前記引き上げの動作を実行させるモータと、
前記引き上げ部の前記引き上げの動作を実行させる手動操作ハンドルと、
前記手動操作ハンドルを操作した時に前記モータの駆動軸に生ずる回転を検出する検出部と、
を備えたことを特徴とする便器洗浄システム。
【請求項2】
前記モータの前記駆動軸と、前記手動操作ハンドルと、が減速手段を介して連動することを特徴とする請求項1記載の便器洗浄システム。
【請求項3】
前記モータの駆動軸と、前記手動操作ハンドルと、は、前記引き上げ部の前記引き上げの動作を実行させるために必要なストロークの少なくとも一部において連動することを特徴とする請求項1記載の便器洗浄システム。
【請求項4】
前記手動操作ハンドルを操作した時に前記モータの駆動軸に生ずる前記回転を前記検出部が検出すると、その後、所定の時間の間は前記モータによる前記引き上げ動作の要求があっても前記モータによる前記引き上げの動作を実行しないことを特徴とする請求項1〜3のいずれか1つに記載の便器洗浄システム。
【請求項5】
前記所定の時間の間に前記モータによる前記引き上げ動作の要求があった場合に、前記所定の時間の経過後に実行することを特徴とする請求項4記載の便器洗浄システム。
【請求項6】
前記所定の時間は、前記手動操作ハンドルの操作方向に応じて異なることを特徴とする請求項4または5に記載の便器洗浄システム。
【請求項7】
前記手動操作ハンドルを操作した時に前記検出部が検出する結果に基づいて前記手動操作ハンドルの回転方向及び回転時間の少なくともいずれかを判定し、その判定結果に基づいて、前記モータによる前記引き上げ動作の条件を決定することを特徴とする請求項1〜6のいずれか1つに記載の便器洗浄システム。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】

【図20】
【図21】
【図22】

【図23】
【図24】
【図25】
【図26】
【図27】

【図28】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【公開番号】特開2006−28816(P2006−28816A)
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願番号】特願2004−206767(P2004−206767)
【出願日】平成16年7月14日(2004.7.14)
【出願人】(000010087)東陶機器株式会社 (3,889)
【Fターム(参考)】
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願日】平成16年7月14日(2004.7.14)
【出願人】(000010087)東陶機器株式会社 (3,889)
【Fターム(参考)】
[ Back to top ]