
便器洗浄装置
【課題】ドップラーセンサを用いた便器洗浄装置において、外乱による便器洗浄バルブの誤作動を少なくし、特定動体に応じた便器洗浄バルブの制御精度の低下も回避する。
【解決手段】便器洗浄装置は、ドップラーセンサ2と、ドップラーセンサ2からのドップラー信号における第1の周波数帯域Bのレベルが第1のレベルTBであることにより特定動体10を判別し、該判別に応じて便器洗浄バルブ50を制御する制御手段3とを有する。制御手段は、ドップラー信号が第1の周波数帯域より低い第2の周波数帯域Aの成分を含み、かつ第1の周波数帯域における一部の周波数部分B1のレベルが第1のレベルである場合は、第1の周波数帯域における該一部の周波数部分を除く他の周波数部分B2を第1の周波数帯域に再設定し、再設定された第1の周波数帯域のレベルが第1のレベルであることにより特定動体を判別する。
【解決手段】便器洗浄装置は、ドップラーセンサ2と、ドップラーセンサ2からのドップラー信号における第1の周波数帯域Bのレベルが第1のレベルTBであることにより特定動体10を判別し、該判別に応じて便器洗浄バルブ50を制御する制御手段3とを有する。制御手段は、ドップラー信号が第1の周波数帯域より低い第2の周波数帯域Aの成分を含み、かつ第1の周波数帯域における一部の周波数部分B1のレベルが第1のレベルである場合は、第1の周波数帯域における該一部の周波数部分を除く他の周波数部分B2を第1の周波数帯域に再設定し、再設定された第1の周波数帯域のレベルが第1のレベルであることにより特定動体を判別する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ドップラーセンサを用いて動体を検出し、電磁バルブ等の便器洗浄バルブを制御して便器に洗浄水を供給する便器洗浄装置に関する。
【背景技術】
【0002】
便器洗浄装置において、マイクロ波やミリ波等の電波を送信し、人体や尿で反射した電波を受信して人体の動きや尿流を検出するドップラーセンサが用いられる場合がある(特許文献1参照)。
【0003】
特許文献1にて開示された便器洗浄装置では、ドップラーセンサによって得られるドップラー信号の周波数(ドップラー周波数:送信電波と受信反射波との周波数差)の違いを利用して人体の動きと尿流とを判別する。
【0004】
ただし、ドップラーセンサは、下水管内の水圧変動に伴う封水面の動きやトイレのドアの開閉等に代表される外乱の影響を受け易いため、このような外乱が人体の動きとして誤判別される場合がある。そして、このような誤判別によって便器洗浄バルブが誤動作し、便器に無駄な洗浄水が供給されてしまう。
【0005】
このため、特許文献1にて開示された便器洗浄装置では、ドップラーセンサによる尿流の検出の有無に応じて、人体の動きを判別するためのドップラー信号レベルの閾値を変更することで、外乱が人体の動きとして誤判別されることを回避している。
【特許文献1】特開2006−214156号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、人体の動きを判別するためのドップラー信号レベルの閾値が高くなるように変更されると、本来判別すべき人体の動きを判別しにくくなる可能性がある。
【0007】
そこで、本発明は、ドップラーセンサを用いた便器洗浄装置において、外乱による特定動体(人体)の誤判別及び便器洗浄バルブの誤作動を少なくすることができるとともに、特定動体に応じた便器洗浄バルブの制御精度の低下も回避できるようにした便器洗浄装置を提供する。
【課題を解決するための手段】
【0008】
本発明の一側面としての便器洗浄装置は、便器への洗浄水の供給を制御する便器洗浄バルブと、電波を送信し、動体によって反射された電波を受信してドップラー信号を生成するドップラーセンサと、ドップラー信号における第1の周波数帯域のレベルが第1のレベルであることにより特定動体を判別し、該判別に応じて便器洗浄バルブを制御する制御手段とを有する。制御手段は、ドップラー信号が第1の周波数帯域に隣接する低い周波数帯域である第2の周波数帯域の成分を含み、かつ第1の周波数帯域における一部の周波数部分のレベルが第1のレベルである場合は、第1の周波数帯域における該一部の周波数部分を除く他の周波数部分を第1の周波数帯域に再設定し、該再設定された第1の周波数帯域のレベルが第1のレベルであることにより特定動体を判別することを特徴とする。
【0009】
本発明においては、第1の周波数帯域を主として便器に対して接近又は離反する人体(特定動体)に対応するように設定し、第1の周波数帯域に隣接する低い周波数帯域である第2の周波数帯域を主として封水の変動等を含む外乱に対応するように設定する。この場合において、第2の周波数帯域の成分が得られ、かつ第1の周波数帯域のレベルにおける一部の周波数部分のレベルが第1のレベルである場合は、この一部の周波数部分のセンサ出力は外乱に起因するものとして扱う。つまり、第1周波数帯域における該一部の周波数部分のレベルが第1のレベルである場合でも人体の動きによるものとして判別せず、該第1の周波数帯域における他の周波数部分のレベルが第1のレベルであることをもって人体の動きを判別する。
【0010】
このように、本発明によれば、ドップラー信号のうち第1の周波数帯域(人体の動きに対応する周波数帯域)に隣接する低い周波数帯域である第2の周波数帯域(封水面の動き等の外乱に対応する周波数帯域)の成分がある場合には、第1の周波数帯域のうち一部の(例えば低い側の)周波数帯域を除外して人体の動きを判別する。つまり、外乱が人体の動きを検出する第1の周波数帯域の一部に影響を及ぼしている可能性がある場合には、その一部の周波数部分を除く周波数帯域で人体の動きを判断する。これにより、便器洗浄バルブの誤作動を少なくしつつ、人体の動きに応じた便器洗浄バルブの制御精度が低下することを回避できる。
【0011】
なお、上記発明において、第2の周波数帯域のレベルが、第1のレベルより大きい第2のレベルであることを条件として、上記他の周波数部分を第1の周波数帯域に再設定し、該再設定された第1の周波数帯域のレベルが第1のレベルであることにより特定動体を判別するようにしてもよい。
【0012】
第2の周波数帯域(外乱に対応する周波数帯域)のレベルが第1のレベルより大きい場合には、外乱が第1の周波数帯域に影響を与えている可能性が高いので、これを条件とすることにより、さらに正確に人体の動きを判断することが可能となる。
【0013】
また、上記発明において、ドップラー信号が第2の周波数帯域の成分を含み、かつ該第2の周波数帯域のレベルが第1のレベルより大きい第2のレベルであり、上記一部の周波数部分のレベルが第1のレベルである場合において、その後に第1の周波数帯域に隣接する高い周波数帯域である第3の周波数帯域の成分が得られないときに、上記他の周波数部分のレベルを第1の周波数帯域に再設定し、該再設定された第1の周波数帯域のレベルが第1のレベルであることにより特定動体を判別するようにしてもよい。
【0014】
第1の周波数帯域によって人体の動きを検出した後に第3の周波数帯域(尿流に対応する周波数帯域)の成分が検出されない場合は、外乱が第1の周波数帯域に影響を与えている可能性が高い。このため、このような場合には、第1の周波数帯域を、もとの第1の周波数帯域における一部の周波数部分を除いた周波数帯域に再設定することにより、正確に人体の動きを判断することが可能となる。
【0015】
すなわち、第1の周波数帯域における一部の周波数部分のレベルが第1のレベルであるというだけでは、該一部の周波数部分の成分が外乱に起因するものか人体の動きに起因するものを確定することが難しい。しかし、その一部の周波数部分の成分が人体の動きに起因したものであれば、その後に尿流に起因する第3又は特定の周波数帯域の成分が出現するはずである。したがって、尿流に起因する成分が得られない場合は、上記一部の周波数部分の成分を外乱に起因するものと扱うことができる。そこで、このことを条件として周波数部分除外処理を行うことで、誤判別や便器洗浄バルブの誤作動をより確実に回避することができる。
【0016】
そして、これらの便器洗浄装置を含む便器システムによれば、人体の動きに応じて正確に洗浄水を便器に供給することができ、無駄な洗浄水の使用を少なくすることができる。
【発明の効果】
【0017】
本発明によれば、ドップラーセンサを用いた便器洗浄装置において、外乱に起因した特定動体の誤判別及び便器洗浄バルブの誤作動を少なくしつつ、特定動体に応じた便器洗浄バルブの制御精度が低下することを回避できる。
【発明を実施するための最良の形態】
【0018】
以下、本発明の実施例について図面を参照しながら説明する。
【実施例1】
【0019】
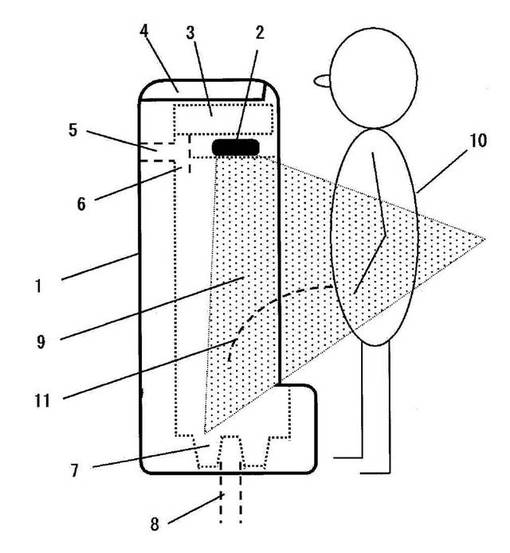
図1には、本発明の実施例1である便器洗浄装置を内蔵した小便器システムの構成を示す。
【0020】
小便器1の上部には、便器洗浄装置を構成するドップラーセンサ2と制御手段としてのコントローラ3とが収容されている。小便器1の上端蓋4は開閉が可能であり、ドップラーセンサ2及びコントローラ3のメンテナンス作業を容易に行うことができる。
【0021】
小便器1の上部背面側には、小便器1のボール部に洗浄水を供給する給水部5が設けられている。給水部5には、後述する便器洗浄バルブが設けられている。給水部5の下部には、便器洗浄バルブからの洗浄水をボール部内に吐出する吐出口6が設けられている。
【0022】
また、ボール部の下部には、封水を形成するためのトラップ部7と排水口8とが設けられている。
【0023】
ドップラーセンサ2は、マイクロ波やミリ波等の電波を送信する。9はドップラーセンサ2からの電波の送信範囲である。この送信範囲9内で人体10が動いたり排尿がなされたりすると、動体である人体(特定動体)10及び尿11によって電波が反射される。このとき、ドップラー効果により、反射した電波(以下、反射波という)の周波数が送信された電波(以下、送信波という)の周波数に対してずれる。この送信波と反射波との周波数の差に基づいて、人体10の動きや尿流を判別することができる。
【0024】
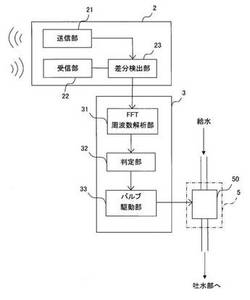
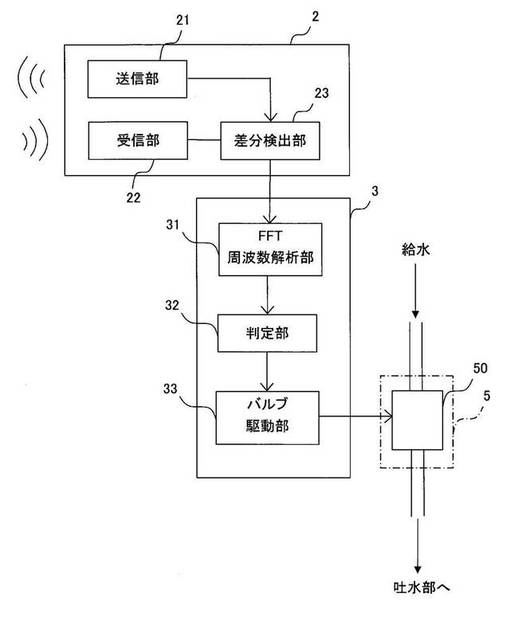
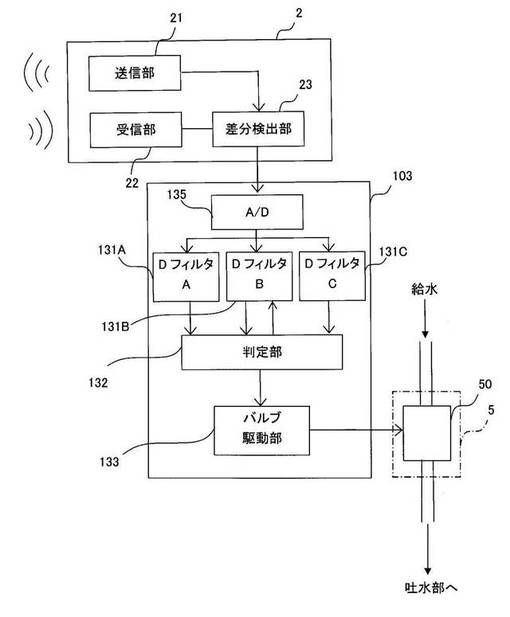
図2には、ドップラーセンサ2とコントローラ3の構成を示している。ドップラーセンサ2において、21は送信波を出力する送信部であり、22は反射波を受信する受信部である。23は送信波と反射波との周波数の差分に相当する周波数を持つドップラー信号を出力する差分検出部である。
【0025】
ドップラー信号は、以下のドップラー周波数ΔFを有する信号である。
【0026】
ΔF=FS−Fb=2×FS×ν/c …(1)
FS:送信波の周波数(10.525GHz)
Fb:反射波の周波数
ν:動体の移動速度
c:光速(約300×106 m/s)
なお、ドップラーセンサ2は、差分検出部23から出力されたドップラー信号を不図示の増幅器によって増幅して出力するが、以下の説明においてはこの増幅後の信号をドップラー信号という。
【0027】
(1)式から分かるように、動体である人体10及び尿11の移動速度に応じて、ドップラー周波数ΔFが変化する。したがって、ドップラー信号の周波数(ドップラー周波数ΔF)とそのレベルとから、動体が人体10か尿11かを判別することができる。
【0028】
ここで、送信波の周波数が10.525GHzである場合、小便器1に対して接近(又は離反)する人体10の一般的な移動速度に対するドップラー周波数ΔFは、例えば20〜50Hzの周波数帯域となる。また、一般的な尿流速度に対するドップラー周波数ΔFは、例えば50〜150Hzの周波数帯域となる。
【0029】
ただし、ドップラーセンサ2は、排水口8に接続されている下水管内の水圧変動に伴う封水面の動きや便器1に近接したトイレのドアの開閉といった外乱も検出する。封水面の動きに対するドップラー周波数ΔFは、例えば0〜35Hzの周波数帯域となる。つまり、封水面の動きに対応するドップラー信号の周波数帯域と人体10の動きに対するドップラー信号の周波数帯域とが一部重複する場合がある。この周波数帯域の重複によって、封水面の動きが人体10の動きと誤って判別されるおそれがある。
【0030】
コントローラ3は、周波数解析部31と、判別部32と、バルブ駆動部33とにより構成されている。
【0031】
周波数解析部31は、高速フーリエ変換(FFT:Fast Fourier Transform)によって、ドップラーセンサ2から出力されたドップラー信号における所定周波数幅ごとの成分のレベルを解析する。本実施例では、0〜150Hzを5Hzの幅で分割し、各5Hz幅(周波数部分)でのドップラー信号のレベルを解析する。
【0032】
なお、以下の説明において、ドップラーセンサ2から得られるドップラー信号のうち各周波数帯域及び周波数部分の成分を、それら周波数帯域及び周波数部分のドップラー信号という。
【0033】
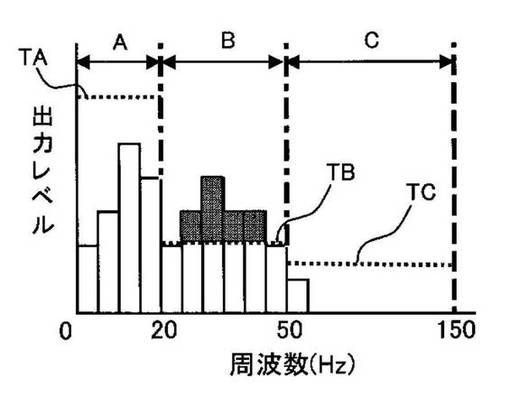
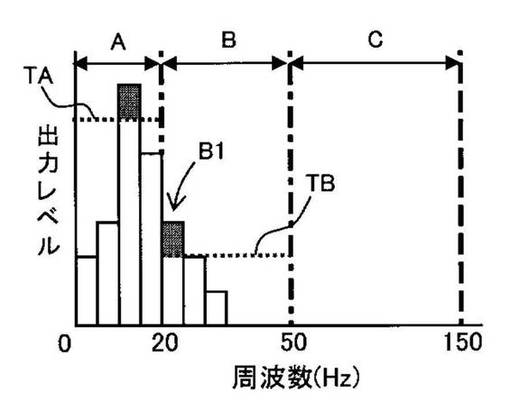
図3には、ドップラーセンサ2から得られるドップラー信号の周波数解析結果の例を示す。図3において、横軸は周波数を、縦軸はドップラー信号のレベル(出力レベル)を示す。Aで示す周波数帯域(0〜20Hz)は、主として封水面の動きに対応して現れるドップラー信号の周波数帯域(第2の周波数帯域:以下、封水周波数帯域という)である。また、Bで示す周波数帯域(20〜50Hz)は、主として人体の動き(接近及び離反)に対応して現れるドップラー信号の周波数帯域(第1の周波数帯域:以下、人体周波数帯域という)である。
【0034】
さらに、Cで示す周波数帯域(50〜150Hz)は、主として尿流に対応して現れるドップラー信号の周波数帯域(第3の周波数帯域及び特定周波数帯域:以下、尿流周波数帯域という)である。図中の縦棒は、5Hz幅ごとのドップラー信号のレベルを示す。このことは、後述する他の周波数解析結果についても同じである。また、ここにいう周波数帯域の隣接とは、Aで示す周波数帯域(0〜20Hz)とBで示す周波数帯域(20〜50Hz)のように、20Hzを境に分けられて、隣り合っていることを示す。実際にはこのAとBの間に、多少の幅の不感帯域を持っていてもいい。BとCについても同様で、この間に商用電源周波数50Hz、60Hzを含む領域は検知判定領域から除いている。
【0035】
この図では、人体周波数帯域Bにおいてドップラー信号のレベルが人体判別閾値TBよりも高いため、後述する判別部33によって、人体10の動きが判別される。なお、人体判別閾値TBより高いレベルが、請求項にいう「第1のレベル」に相当する。また、本実施例及び後述する実施例2において、「(判別閾値)より高い」は、判別閾値と同じ値を含まなくてもよいし含んでもよいものとする。
【0036】
判別部32は、周波数解析部31によって解析された所定周波数幅ごとのドップラー信号のレベルに基づいて、人体10の動きや尿流11の有無を判別(検出)する。
【0037】
判別部32は、図3に示すようなドップラー信号のレベルが得られた場合、前述したように人体10の動き(ここでは、便器1への接近とする)を判別する。
【0038】
なお、図3では、人体10の動きに伴って封水及び尿流周波数帯域A,Cにおいてもノイズとしてのドップラー信号が現れているが、そのレベルは封水及び尿流判別閾値TA,TCよりも低いため、封水面の動きや尿流としては判別されない。
【0039】
図4には、別のドップラー信号の周波数解析結果の例を示す。この図では、封水周波数帯域Aにおいてドップラー信号のレベルが封水判別閾値TAより高いため、封水面の動きがあると考えられる。しかし、人体周波数帯域Bのうち封水周波数帯域Aに隣接した一部の周波数部分(ここでは、20〜25Hzの周波数部分)においても、封水面の動きに伴うノイズとしてのドップラー信号のレベルが人体判別閾値TBよりも高くなっている。このため、従来では、このノイズとしてのドップラー信号によって人体10の接近があると誤判別されてしまう。
【0040】
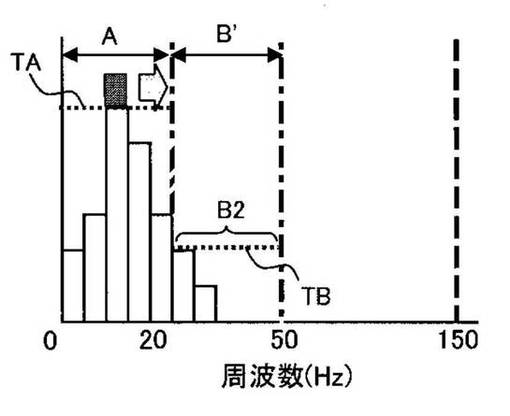
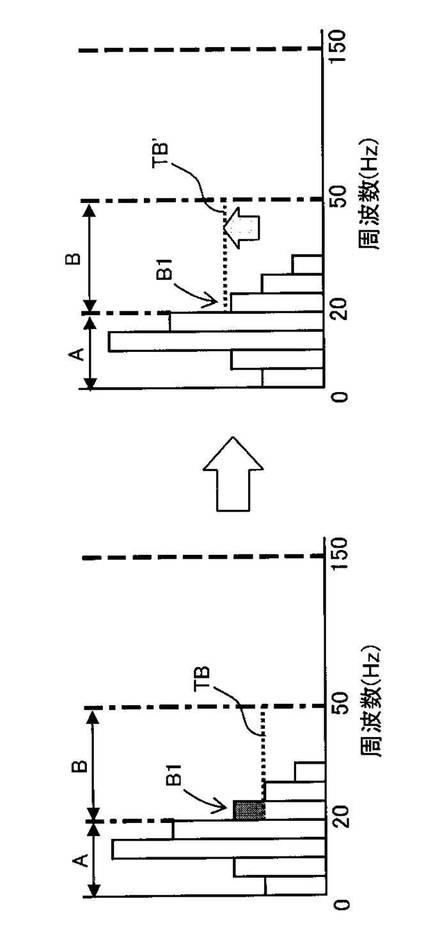
そこで、本実施例では、図4に示すように、封水周波数帯域Aにおいて封水判別閾値TAよりも高いレベルのドップラー信号が現れ、かつ人体周波数帯域Bのうち一部の周波数部分B1において人体判別閾値TBよりも高いレベルの(第1のレベルの)ドップラー信号が現れた場合(以下、第1の場合という)は、図5に示すように、人体周波数帯域Bから周波数部分B1を除外する。これにより、この後は、人体周波数帯域Bとして、周波数部分B1を除いた他の周波数部分B2に対応する周波数帯域B′が再設定される。このように人体周波数帯域Bから周波数部分B1を除外する処理を、以下、周波数部分除外処理という。
【0041】
なお、周波数部分除外処理は、人体周波数帯域Bを人体周波数帯域B′に変更する周波数帯域変更処理ということもできる。
【0042】
このような周波数部分除外処理を行うことにより、周波数部分B1のドップラー信号のレベルが人体判別閾値TBより高くても、周波数部分B2(変更後の人体周波数帯域B′)のドップラー信号のレベルは人体判別閾値TBよりも低いので、周波数部分B1のドップラー信号によって人体10の接近があるものと誤判別されてしまうことを回避できる。そして、この後は、変更後の人体周波数帯域B′のドップラー信号のレベルが人体判別閾値TBよりも高い(第1のレベルである)ことに応じて人体10の接近が判別される。
【0043】
なお、図5では、人体周波数帯域Bを人体周波数帯域B′に変更したことに伴って封水周波数帯域Aが周波数部分B1を含むように変更されているが、必ずしも封水周波数帯域Aを周波数部分B1を含むように変更する必要はない。
【0044】
また、図5では、封水周波数帯域Aでの封水判別閾値TAよりも高いレベルのドップラー信号の出現を条件として周波数部分除外処理を行う場合について説明したが、封水周波数帯域Aでのドップラー信号の出現を条件とし、そのドップラー信号のレベルが封水判別閾値TAよりも高いことを条件としなくてもよい。
【0045】
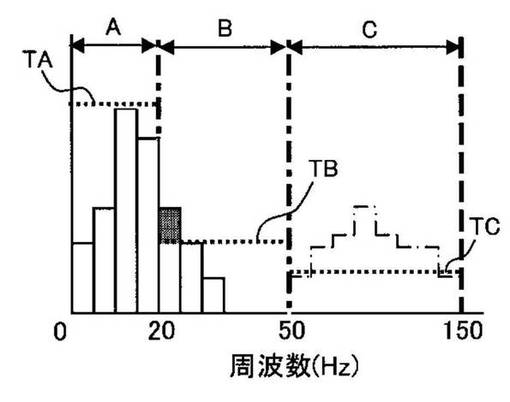
図6には、さらに別のドップラー信号の周波数解析結果の例を示す。この図では、周波数帯域Aにおいてドップラー信号のレベルは封水判別閾値TAよりも低いが、周波数帯域Bのうち周波数部分B1のみのドップラー信号のレベルが人体判別閾値TBよりも高い。一方、実際に人体10の接近がある場合は、図3に示すように、周波数部分B1を含む周波数帯域Bのより広い範囲でドップラー信号のレベルが人体判別閾値TBより高くなることが多いものの、周波数部分B1のみでドップラー信号のレベルが人体判別閾値TBよりも高くなる場合もあり得る。したがって、図6に示すような状態では、周波数部分B1のドップラー信号が封水面の動きによるものか人体10の接近によるものかを明確に判別することができない。
【0046】
しかし、便器1に接近した人体10は、この後排尿をするはずであり、その結果、図6中に一点鎖線で示すように、周波数帯域Cで尿流判別閾値TCよりも高いレベルのドップラー信号が現れるはずである。逆に言えば、尿流判別閾値TCよりも高いレベルのドップラー信号が現れなければ、周波数部分B1のドップラー信号は人体10の接近によるものではなく、封水面の動きによるものとみなすことができる。
【0047】
そこで、本実施例では、周波数帯域Aにおいてドップラー信号が現れ、かつ周波数帯域Bのうち一部の周波数部分B1において人体判別閾値TBよりも高いレベルのドップラー信号が現れた場合において、その後に尿流周波数帯域Cで尿流判別閾値TCよりも高いレベルのドップラー信号が現れないとき(以下、第2の場合という)には、図5にて説明したように、周波数帯域Bから周波数部分B1を除外する周波数部分除外処理(又は周波数帯域変更処理)を行う。
【0048】
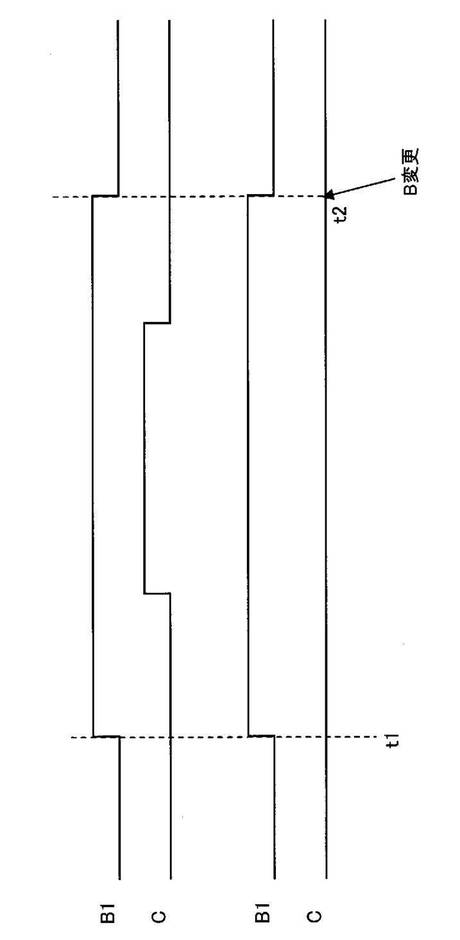
つまり、図7の上図に示すように、時刻t1にて周波数部分B1のドップラー信号のレベルが人体判別閾値TBよりも高い場合において、時刻t2までに尿流周波数帯域Cで尿流判別閾値TCよりも高いレベルのドップラー信号が現れた場合には、周波数部分除外処理は行わない。一方、図7の下図に示すように、時刻t1にて周波数部分B1のドップラー信号のレベルが人体判別閾値TBよりも高い場合において、時刻t2までに尿流周波数帯域Cで尿流判別閾値TCよりも高いレベルのドップラー信号が現れない場合には、周波数部分除外処理を行う。
【0049】
これにより、前述した第1の場合(図5)と同様に、周波数部分B1のドップラー信号のレベルが人体判別閾値TBより高くても、周波数部分B2(変更後の人体周波数帯域B′)のドップラー信号のレベルは人体判別閾値TBよりも低いので、周波数部分B1のドップラー信号によって人体10の接近があるものと誤判別されてしまうことを回避できる。そして、この後は、再設定された人体周波数帯域B′のドップラー信号のレベルが人体判別閾値TBよりも高い(第1のレベルである)ことに応じて人体10の接近が判別される。
【0050】
なお、図4に示すようなドップラー信号が得られた場合(第1の場合)でも、上記のように尿流周波数帯域Cでの尿流判別閾値TCより高いレベルのドップラー信号の出現を条件として周波数部分除外処理を行うこともできる。この場合、第1の場合において周波数部分除外処理を行う条件を厳しくすることができるので、その分、周波数部分除外処理をより適正に行うことができる。
【0051】
以上のように、本実施例によれば、第1及び第2の場合のように封水面の動きに起因して周波数部分B1のドップラー信号のレベルが人体判別閾値TBよりも高くても、人体10の接近があるものと誤判別されることを回避できる。
【0052】
従来では、誤判別を回避するために、図8に示すような方法が採られていた。すなわち、図8の左図に示すように、封水面の動きに起因して周波数部分B1で人体判別閾値TBよりも高いレベルのドップラー信号が現れた場合には、右図に示すように、人体周波数帯域Bでの人体判別閾値TBをそれよりも高いTB′に変更する。これにより、周波数部分B1のドップラー信号が人体判別閾値TB′より低くなるため、人体10の接近によるものとして誤判別される可能性を低くすることができる。
【0053】
しかし、人体判別閾値TB′が高く変更されることによって、実際に人体10の接近によって生じた人体周波数帯域Bのドップラー信号のレベルが人体判別閾値TB′よりも低くなる可能性が高くなる。つまり、人体10の動きの判別を失敗してしまう確率が高くなる。
【0054】
これに対し、本実施例では、前述した第1及び第2の場合に、人体判別閾値TBを変更せずに周波数部分B1を人体周波数帯域Bから除外する(人体周波数帯域B′に変更する)ようにしている。このため、実際に人体10の接近によって人体周波数帯域B′でドップラー信号が現れれば、高い確率で人体判別閾値TBよりも高くなる。したがって、人体10の動きの判別を失敗してしまう確率を低く抑えることができ、該判別の精度が低下することを回避できる。
【0055】
なお、判別部32は、人体10の接近を判別した後に、再度人体周波数帯域B(又はB′)のドップラー信号のレベルが人体判別閾値TBより高いことにより、人体10の離反を判別する。人体10の離反を判別する場合には、人体10の接近を判別する場合と人体周波数帯域Bや人体判別閾値TBを異ならせてもよい。
【0056】
図2に示したバルブ駆動部33は、判別部32での判別結果に応じて、便器洗浄バルブ50を制御する。便器洗浄バルブ50としては、電磁バルブ等の電気信号により制御可能なバルブを用いることができる。なお、以下の説明では、便器洗浄バルブ50は電磁バルブとする。バルブ駆動部33は、判別部32で人体10の接近を検出した場合には、便器洗浄バルブ50を所定のプレ洗浄時間の間、開動作させて便器1(ボール部)に洗浄水を供給し、尿石のボール部への堆積をより生じにくくするための、いわゆるプレ洗浄を行う。
【0057】
また、バルブ駆動部33は、判別部32で尿流ありと判別し、さらに人体10が離反したと判別した場合は、便器洗浄バルブ50を所定の本洗浄時間の間、開動作させて便器1(ボール部)に洗浄水を供給し、本洗浄を行う。
【0058】
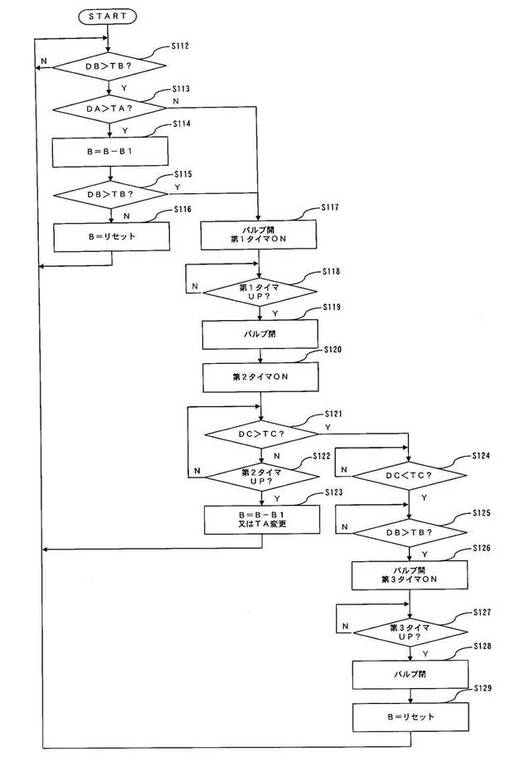
以下、コントローラ3(判別部32及びバルブ駆動部33)での処理手順について、図9のフローチャートを用いて説明する。この処理は、コントローラ3内の不図示のメモリに格納されたコンピュータプログラムに従って実行される。
【0059】
なお先の説明では、便宜上、判別部32が封水、人体10の動き及び尿流の存在そのものを判別するかのように説明した。しかし、実際には、判別部32は、3つの周波数帯域A,B,Cにおいてドップラー信号のレベルが判別閾値TA,TB,TCよりも高いか否かの判定を、封水、人体10の動き及び尿流の判別処理として行う。
【0060】
まず、ステップ(図にはSと略記する)112では、判別部32は、ドップラーセンサ2からのドップラー信号のうち人体周波数帯域Bにおける一部の周波数部分B1のドップラー信号DBのレベルが人体判別閾値TBよりも高いか否か(第1のレベルであるか否か)を判定する。周波数部分B1は、例えば封水周波数帯域Aに隣接した1又は複数の5Hz幅の周波数部分として設定することができる。なお、前述したように、「人体判別閾値TBよりも高いか否か」は、「人体判別閾値TB以上か否か」としてもよい。このことは、後述する他のドップラー信号と判別閾値との大小関係の判定でも同じである。ドップラー信号DBのレベルが人体判別閾値TBよりも高い場合はステップ113に進み、人体判別閾値TBよりも低い場合は本ステップを繰り返す。
【0061】
ステップ113では、判別部32は、ドップラーセンサ2からのドップラー信号に、封水周波数帯域Aのドップラー信号DAが含まれているか否かを判定する。ドップラー信号DAが含まれている場合は、さらに封水周波数帯域Aのドップラー信号DAのレベルが封水判別閾値TAよりも高いか否かを判定する。封水判別閾値TAよりも高い場合はステップ114に進み、封水判別閾値TAよりも低い場合(及びドップラー信号DAが含まれていない場合)はステップ117に進む。
【0062】
ステップ114では、判別部32は、人体周波数帯域Bから周波数部分B1を除いた他の周波数部分(B2)を新たな人体周波数帯域B(B′)として再設定する。言い換えれば、もとの人体周波数帯域Bから周波数部分B1を除外する周波数部分除外処理(又は人体周波数帯域Bを周波数部分B2に対応する人体周波数帯域B′に変更する周波数帯域変更処理)を行う。そして、ステップ115に進む。
【0063】
ステップ115では、判別部32は、ステップ114で再設定された人体周波数帯域Bのドップラー信号DBのレベルが人体判別閾値TBよりも高いか否かを判定する。ドップラー信号DBのレベルが人体判別閾値TBよりも高い場合は、人体10の接近があるものとして、ステップ117に進む。一方、ドップラー信号DBのレベルが人体判別閾値TBよりも低い場合は、ステップ112で得られた人体判別閾値TBよりも高いレベルのドップラー信号DBが封水面の動きに起因したものであったとして、ステップ116に進む。
【0064】
ステップ116では、判別部32は、人体周波数帯域Bをもとの(ステップ114で再設定される前の)人体周波数帯域Bにリセットする(初期値に戻す)。そして、ステップ112に戻る。
【0065】
ステップ117では、バルブ駆動部33は、人体10の接近に応じて便器洗浄バルブ50を開動作させるとともに、判別部32は、第1の所定時間を計測するための第1タイマのカウントをスタート(ON)する。これにより、プレ洗浄が開始される。
【0066】
続いてステップ118では、バルブ駆動部33は、第1タイマによる第1の所定時間の計測が終了したか否かを判定する。計測が終了していない場合は、再度このステップを繰り返す。一方、計測が終了した場合は、ステップ119に進み、便器洗浄バルブ50を閉動作させる。これにより、プレ洗浄が終了される。
【0067】
次にステップ120では、判別部32は、第2の所定時間を計測するための第2タイマのカウントをスタート(ON)する。
【0068】
そして、ステップ121では、判別部32は、尿流周波数帯域Cにおいて、尿流判別閾値TCよりも高いレベルのドップラー信号DCが得られたか否かを判定する。この判定は、人体周波数帯域Bにおいて人体判別閾値TBよりも高いレベルのドップラー信号DBが得られた後に、尿流が生じたか否かの判定である。言い換えれば、人体判別閾値TBよりも高いレベルのドップラー信号DBが人体10の接近によるものか否かの判定である。尿流判別閾値TCよりも高いレベルのドップラー信号DCが得られた場合はステップ124に進み、尿流判別閾値TCよりも高いレベルのドップラー信号DCが得られない場合はステップ122に進む。
【0069】
ステップ122では、判別部32は、第2タイマによる第2の所定時間の計測が終了したか否かを判定する。計測が終了していない場合は、ステップ121に戻る。一方、計測が終了した場合は、ステップ115で判定した人体判別閾値TBよりも高いレベルのドップラー信号DBが、封水面の動きに起因したものであるとして、ステップ123に進む。
【0070】
ステップ123では、判別部32は、人体周波数帯域Bから周波数部分B1を除いた他の周波数部分(B2)を新たな人体周波数帯域B(B′)として再設定する。または、封水判別閾値TAをステップ113で検出された封水周波数帯域Aのドップラー信号DAのレベルまで低くなるように変更する。そして、ステップ112に戻る。
【0071】
ステップ124では、判別部32は、ドップラー信号DCが尿流判別閾値TCよりも低くなったか否か(排尿が終了したか否か)を判定する。ドップラー信号DCが尿流判別閾値TCよりも低くなっていない場合(まだ排尿が続いている場合)は本ステップを繰り返す。また、ドップラー信号DCが尿流判別閾値TCよりも低くなった場合はステップ125に進む。
【0072】
ステップ125では、判別部32は、人体周波数帯域Bのドップラー信号DBのレベルが人体判別閾値TBよりも高いか否かを判定する。この判定での人体周波数帯域B及び人体判別閾値TBは、ステップ115での人体10の接近判別で用いた人体周波数帯域B及び人体判別閾値TBと異ならせてもよい。人体判別閾値TBよりも高いレベルのドップラー信号DBが得られた場合は、人体10が離反したものとして、ステップ126に進む。一方、人体判別閾値TBよりも高いレベルのドップラー信号DBが得られない場合(まだ人体10が離反していない場合)は、このステップを繰り返す。
【0073】
ステップ126では、バルブ駆動部33は、人体10の離反判別に応じて便器洗浄バルブ50を開動作させる。また、判別部32は、第3の所定時間(本洗浄時間)を計測するための第3タイマのカウントをスタート(ON)する。これにより、本洗浄が開始される。
【0074】
続いてステップ127では、判定部32は、第3タイマによる第3の所定時間の計測が終了したか否かを判定する。計測が終了していない場合は、再度このステップを繰り返す。一方、計測が終了した場合は、ステップ128に進み、便器洗浄バルブ50を閉動作させる。そして、ステップ129に進む。
【0075】
ステップ129では、判別部32は、ステップ13で人体周波数帯域Bが再設定された場合は、その人体周波数帯域Bをもとの人体周波数帯域Bにリセットする(初期値に戻す)。そして、ステップ112に戻る。
【0076】
以上説明したように、本実施例では、封水周波数帯域Aのドップラー信号(封水判別閾値TAより高いレベルのドップラー信号)が得られ、かつ人体周波数帯域Bにおける一部の周波数部分B1において人体判別閾値TBより高いレベルのドップラー信号が得られた場合(第1の場合)には、この周波数部分B1のドップラー信号は封水面の動き(外乱)に起因するものとして扱う。
【0077】
また、本実施例では、封水周波数帯域Aのドップラー信号(封水判別閾値TAより低いレベルのドップラー信号)が得られ、かつ人体周波数帯域Bにおける一部の周波数部分B1において人体判別閾値TBより高いレベルのドップラー信号が得られた場合において、その後に尿流周波数帯域Cでのドップラー信号が得られないとき(第2の場合)も、周波数部分B1でのセンサ出力を封水面の動き(外乱)に起因するものと扱う。そして、上記第1及び第2の場合に、人体周波数帯域Bから周波数部分B1を除外(人体周波数帯域Bを再設定)する。言い換えれば、該周波数部分B1のドップラー信号を人体10の動き判別には使用しない。
【0078】
このように、本実施例では、人体10の動き判別を行うためのドップラー信号レベル(人体判別閾値TB)を変更することなく外乱に起因したドップラー信号を除外して人体10の動判別を行うので、外乱に起因した人体10の動きの誤判別及び便器洗浄バルブ50の誤作動を少なくしつつ、人体10の動きに応じた便器洗浄バルブ50の制御精度が低下することも回避できる。
【実施例2】
【0079】
図10には、本発明の実施例2である便器洗浄装置の構成を示している。本実施例において、ドップラーセンサ2は、実施例1で説明したものと同じものである。
【0080】
コントローラ103は、A/D変換器135と、デジタル(D)フィルタ131A,131B,131Cと、判別部132と、バルブ駆動部133とを有する。
【0081】
A/D変換器135は、ドップラーセンサ2からのドップラー信号(アナログ信号)をデジタル信号に変換する。
【0082】
デジタルフィルタ131A,131B,131Cはそれぞれ、デジタル化されたドップラー信号のうち、封水周波数帯域A、人体周波数帯域B及び尿流周波数帯域Cでの成分を通過させる。
【0083】
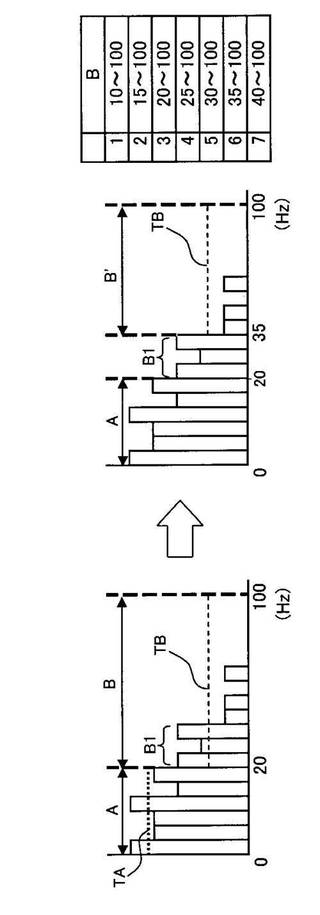
ここで、デジタルフィルタ131Bは、図11の右側の表に示すように、ドップラー信号の通過周波数帯域としての人体周波数帯域Bを、高周波数側が100Hzに固定されて低周波側が5Hzずつ高くなる複数の周波数帯域(ステップ1〜7)で切り換えることができる。
【0084】
判別部132は、デジタルフィルタ131A,131B,131Cからの出力(ドップラー信号)に基づいて、実施例1の判別部32と基本的に同じ処理を行う。ただし、判別部132は、周波数部分除外処理(又は周波数帯域変更処理)として、デジタルフィルタ131Bにおける通過周波数帯域を上記ステップ1〜7の間で切り換えるように該フィルタ131Bを制御する。
【0085】
例えば、図11の左図のように、封水周波数帯域Aが0〜20Hzの帯域に設定され、人体周波数帯域Bが20〜100Hzのステップ3に設定されているとする。このとき、封水周波数帯域Aにて封水判別閾値TAを超えるドップラー信号が現れ、かつ人体周波数帯域Bのうち一部の周波数部分B1(20〜35Hz)にて人体判別閾値TBを超えるドップラー信号が現れた場合(第1の場合)には、判別部132は、デジタルフィルタ131Bに対して、図11の中央図に示すように、人体周波数帯域Bを35〜100Hzのステップ6である人体周波数帯域B′に切り換える(再設定する)よう指示する。
【0086】
これにより、実施例1での人体周波数帯域Bの再設定(周波数部分除外処理又は周波数帯域変更処理)と同じ処理がなされることになる。なお、ここでは封水周波数帯域Aは変更していないが、周波数部分B1を含むように封水周波数帯域Aを変更してもよい。
【0087】
また、図示はしないが、判別部132は、実施例1で説明した第2の場合においても同様に、デジタルフィルタ131Bにおける通過周波数帯域を切り換える。
【0088】
このようにデジタルフィルタ131A,131B,131Cを用いることにより、実施例1のようなFFTによる周波数解析を行う場合に比べて、より簡単にかつ速く、周波数帯域A,B,Cでのドップラー信号を得ることができる。
【0089】
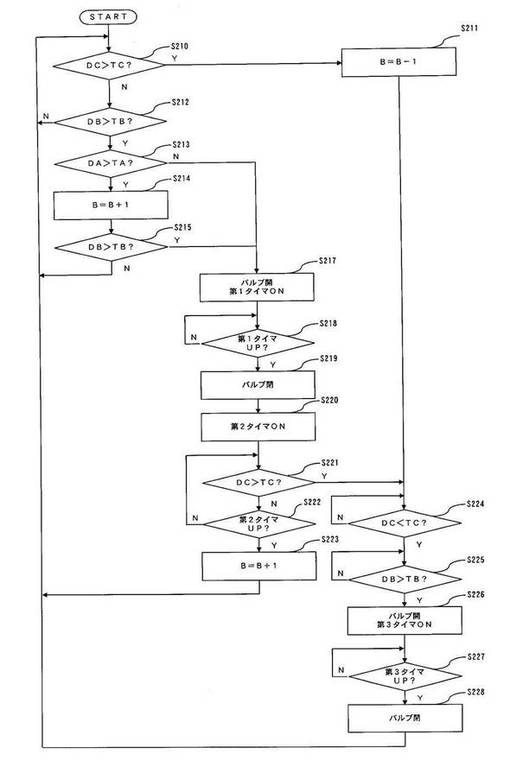
図12には、本実施例におけるコントローラ3(判別部132及びバルブ駆動部133)での処理手順を示している。この処理は、コントローラ103内の不図示のメモリに格納されたコンピュータプログラムに従って実行される。
【0090】
まず、ステップ210では、判別部132は、尿流周波数帯域Cにおいて得られたドップラー信号DCが尿流判別閾値TCよりも高いレベルか否かを判定する。ドップラー信号DCが尿流閾値TCよりも高い場合はステップ211に進む。また、ドップラー信号DCが尿流周波数帯域Cよりも低い場合はステップ212に進む。
【0091】
ステップ211では、人体周波数帯域Bの設定範囲を、図11に示す表中で1つ小さいステップに切り換える(再設定する)。例えば、人体周波数帯域Bの設定範囲を、図11に示すステップ2からステップ1に切り換える。そして、後述するステップ224に進む。
【0092】
ステップ212では、判別部132は、ドップラーセンサ2からのドップラー信号のうち人体周波数帯域Bにおける一部の周波数部分B1のドップラー信号DBのレベルが人体判別閾値TBよりも高いか否か(第1のレベルであるか否か)を判定する。人体周波数帯域Bの初期設定範囲は、図11に示すステップ1である。また、周波数部分B1は、例えば封水周波数帯域Aに隣接した1又は複数の5Hz幅の周波数部分として設定することができる。ドップラー信号DBのレベルが人体判別閾値TBよりも高い場合はステップ213に進み、人体判別閾値TBよりも低い場合はステップ210に戻る。
【0093】
ステップ213では、判別部132は、ドップラーセンサ2からのドップラー信号に、封水周波数帯域Aのドップラー信号DAが含まれているか否かを判定する。ドップラー信号DAが含まれている場合は、さらに封水周波数帯域Aのドップラー信号DAのレベルが封水判別閾値TAよりも高いか否かを判定する。封水判別閾値TAよりも高い場合はステップ214に進み、封水判別閾値TAよりも低い場合(及びドップラー信号DAが含まれていない場合)はステップ217に進む。
【0094】
ステップ214では、判別部132は、人体周波数帯域Bの設定範囲を、図11に示す表中で1大きいステップに切り換える(再設定する)。例えば、人体周波数帯域Bの設定範囲を、図11に示すステップ1からステップ2に切り換える。そして、ステップ215に進む。
【0095】
ステップ215では、判別部132は、ステップ214で再設定された人体周波数帯域Bのドップラー信号DBのレベルが人体判別閾値TBよりも高いか否かを判定する。ドップラー信号DBのレベルが人体判別閾値TBよりも高い場合は、人体10の接近があるものとして、ステップ217に進む。一方、ドップラー信号DBのレベルが人体判別閾値TBよりも低い場合は、ステップ212で得られた人体判別閾値TBよりも高いレベルのドップラー信号DBが封水面の動きに起因したものであったとして、ステップ210に戻る。
【0096】
ステップ217では、バルブ駆動部133は、人体10の接近に応じて便器洗浄バルブ50を開動作させるとともに、判別部132は、第1の所定時間を計測するための第1タイマのカウントをスタート(ON)する。これにより、プレ洗浄が開始される。
【0097】
続いてステップ218では、バルブ駆動部133は、第1タイマによる第1の所定時間の計測が終了したか否かを判定する。計測が終了していない場合は、再度このステップを繰り返す。一方、計測が終了した場合は、ステップ219に進み、便器洗浄バルブ50を閉動作させる。これにより、プレ洗浄が終了される。
【0098】
次にステップ220では、判別部132は、第2の所定時間を計測するための第2タイマのカウントをスタート(ON)する。
【0099】
そして、ステップ221では、判別部132は、尿流周波数帯域Cにおいて、尿流判別閾値TCよりも高いレベルのドップラー信号DCが得られたか否かを判定する。この判定は、人体周波数帯域Bにおいて人体判別閾値TBよりも高いレベルのドップラー信号DBが得られた後に、尿流が生じたか否かの判定である。言い換えれば、人体判別閾値TBよりも高いレベルのドップラー信号DBが人体10の接近によるものか否かの判定である。尿流判別閾値TCよりも高いレベルのドップラー信号DCが得られた場合はステップ224に進み、尿流判別閾値TCよりも高いレベルのドップラー信号DCが得られない場合はステップ222に進む。
【0100】
ステップ222では、判別部132は、第2タイマによる第2の所定時間の計測が終了したか否かを判定する。計測が終了していない場合は、ステップ221に戻る。一方、計測が終了した場合は、ステップ215で判定した人体判別閾値TBよりも高いレベルのドップラー信号DBが、封水面の動きに起因したものであるとして、ステップ223に進む。
【0101】
ステップ223では、判別部132は、人体周波数帯域Bの設定範囲を、図11に示す表中で1大きいステップに切り換える(再設定する)。すなわち、人体周波数帯域Bにおける一部の周波数部分B1において人体判別閾値TBより高いレベルのドップラー信号が得られた場合において、その後に尿流周波数帯域Cでのドップラー信号が得られないときは、周波数部分B1でのセンサ出力を封水面の動き(外乱)に起因するものと扱い、人体周波数帯域Bから周波数部分B1を除く処理を行う。そして、ステップ210に戻る。
【0102】
また、判別部132は、ステップ221で尿流判別閾値TCよりも高いレベルのドップラー信号DCが得られた場合は、ステップ224に進む。
【0103】
ステップ224では、判別部132は、ドップラー信号DCが尿流判別閾値TCよりも低くなったか否か(排尿が終了したか否か)を判定する。ドップラー信号DCが尿流判別閾値TCよりも低くなっていない場合(まだ排尿が続いている場合)は本ステップを繰り返す。また、ドップラー信号DCが尿流判別閾値TCよりも低くなった場合はステップ225に進む。
【0104】
ステップ225では、判別部132は、人体周波数帯域Bのドップラー信号DBのレベルが人体判別閾値TBよりも高いか否かを判定する。この判定での人体周波数帯域B及び人体判別閾値TBは、ステップ215での人体10の接近判別で用いた人体周波数帯域B及び人体判別閾値TBと異ならせてもよい。人体判別閾値TBよりも高いレベルのドップラー信号DBが得られた場合は、人体10が離反したものとして、ステップ226に進む。一方、人体判別閾値TBよりも高いレベルのドップラー信号DBが得られない場合(まだ人体10が離反していない場合)は、このステップを繰り返す。
【0105】
ステップ226では、バルブ駆動部133は、人体10の離反判別に応じて便器洗浄バルブ50を開動作させる。また、判別部132は、第3の所定時間(本洗浄時間)を計測するための第3タイマのカウントをスタート(ON)する。これにより、本洗浄が開始される。
【0106】
続いてステップ227では、判定部132は、第3タイマによる第3の所定時間の計測が終了したか否かを判定する。計測が終了していない場合は、再度このステップを繰り返す。一方、計測が終了した場合は、ステップ228に進み、便器洗浄バルブ50を閉動作させる。そして、ステップ210に戻る。
【0107】
本実施例でも、人体10の動き判別を行うためのドップラー信号レベル(人体判別閾値TB)を変更することなく外乱に起因したドップラー信号を除外して人体10の動判別を行うので、外乱に起因した人体10の動きの誤判別及び便器洗浄バルブ50の誤作動を少なくしつつ、人体10の動きに応じた便器洗浄バルブ50の制御精度が低下することも回避できる。
【0108】
以上説明した各実施例は代表的な例にすぎず、本発明の実施に際しては、各実施例に対して種々の変形や変更が可能である。
【0109】
例えば、上記各実施例では、封水周波数帯域Aのドップラー信号が得られたことを条件として周波数部分除外処理を行う場合について説明した。しかし、封水周波数帯域Aのドップラー信号が得られない場合でも、人体周波数帯域Bにおける一部の周波数部分B1において人体判別閾値TBよりも高いレベルのドップラー信号が得られ、その後に尿流周波数帯域Cのドップラー信号が得られないことを条件として、人体周波数帯域Bの周波数部分除外処理(又は周波数帯域変更処理)を行うようにしてもよい。
【0110】
これにより、封水面の動きによって、封水周波数帯域Aのドップラー信号は現れないが周波数部分B1のドップラー信号が現れたような場合において、周波数部分B1を人体周波数帯域Bから除外することができ、封水面の動きを人体10の動きと誤判別することを回避できる。
【0111】
さらに、本実施例では、上記第1及び第2の場合に、人体周波数帯域Bから周波数部分B1を除外する(人体周波数帯域Bを他の周波数帯域B′に変更する)場合について説明した。しかし、人体周波数帯域Bを変更せずに、人体周波数帯域Bのドップラー信号のうち周波数部分B1のドップラー信号を無効とし、他の周波数部分B2のドップラー信号のみを用いて人物10の動き判別を行うようにしてもよい。
【図面の簡単な説明】
【0112】
【図1】本発明の実施例1である便器洗浄装置を備えた便器システムを示す概略図。
【図2】実施例1の便器洗浄装置の構成を示すブロック図。
【図3】実施例1におけるドップラー信号の周波数解析結果の例を示す図。
【図4】実施例1におけるドップラー信号の周波数解析結果の他の例を示す図。
【図5】実施例1における周波数部分除外処理を示す図。
【図6】実施例1におけるドップラー信号の周波数解析結果のさらに他の例を示す図。
【図7】実施例1における人体検出と尿流検出との関係を示すタイムチャート。
【図8】従来の人体判別閾値の変更処理を示す図。
【図9】実施例1での処理手順を示すフローチャート。
【図10】本発明の実施例2である便器洗浄装置の構成を示すブロック図。
【図11】実施例2における周波数帯域変更処理を示す図。
【図12】実施例2での処理手順を示すフローチャート。
【符号の説明】
【0113】
1 小便器
2 ドップラーセンサ
3,103 コントローラ
5 給水部
9 センサ検出範囲
7 トラップ部
8 排水口
10 人体
11 尿
21 送信部
22 受信部
23 差分検出部
31 周波数解析部
32,132 判別部
33,133 バルブ駆動部
50 便器洗浄バルブ
131A,131B,131C デジタルフィルタ
【技術分野】
【0001】
本発明は、ドップラーセンサを用いて動体を検出し、電磁バルブ等の便器洗浄バルブを制御して便器に洗浄水を供給する便器洗浄装置に関する。
【背景技術】
【0002】
便器洗浄装置において、マイクロ波やミリ波等の電波を送信し、人体や尿で反射した電波を受信して人体の動きや尿流を検出するドップラーセンサが用いられる場合がある(特許文献1参照)。
【0003】
特許文献1にて開示された便器洗浄装置では、ドップラーセンサによって得られるドップラー信号の周波数(ドップラー周波数:送信電波と受信反射波との周波数差)の違いを利用して人体の動きと尿流とを判別する。
【0004】
ただし、ドップラーセンサは、下水管内の水圧変動に伴う封水面の動きやトイレのドアの開閉等に代表される外乱の影響を受け易いため、このような外乱が人体の動きとして誤判別される場合がある。そして、このような誤判別によって便器洗浄バルブが誤動作し、便器に無駄な洗浄水が供給されてしまう。
【0005】
このため、特許文献1にて開示された便器洗浄装置では、ドップラーセンサによる尿流の検出の有無に応じて、人体の動きを判別するためのドップラー信号レベルの閾値を変更することで、外乱が人体の動きとして誤判別されることを回避している。
【特許文献1】特開2006−214156号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、人体の動きを判別するためのドップラー信号レベルの閾値が高くなるように変更されると、本来判別すべき人体の動きを判別しにくくなる可能性がある。
【0007】
そこで、本発明は、ドップラーセンサを用いた便器洗浄装置において、外乱による特定動体(人体)の誤判別及び便器洗浄バルブの誤作動を少なくすることができるとともに、特定動体に応じた便器洗浄バルブの制御精度の低下も回避できるようにした便器洗浄装置を提供する。
【課題を解決するための手段】
【0008】
本発明の一側面としての便器洗浄装置は、便器への洗浄水の供給を制御する便器洗浄バルブと、電波を送信し、動体によって反射された電波を受信してドップラー信号を生成するドップラーセンサと、ドップラー信号における第1の周波数帯域のレベルが第1のレベルであることにより特定動体を判別し、該判別に応じて便器洗浄バルブを制御する制御手段とを有する。制御手段は、ドップラー信号が第1の周波数帯域に隣接する低い周波数帯域である第2の周波数帯域の成分を含み、かつ第1の周波数帯域における一部の周波数部分のレベルが第1のレベルである場合は、第1の周波数帯域における該一部の周波数部分を除く他の周波数部分を第1の周波数帯域に再設定し、該再設定された第1の周波数帯域のレベルが第1のレベルであることにより特定動体を判別することを特徴とする。
【0009】
本発明においては、第1の周波数帯域を主として便器に対して接近又は離反する人体(特定動体)に対応するように設定し、第1の周波数帯域に隣接する低い周波数帯域である第2の周波数帯域を主として封水の変動等を含む外乱に対応するように設定する。この場合において、第2の周波数帯域の成分が得られ、かつ第1の周波数帯域のレベルにおける一部の周波数部分のレベルが第1のレベルである場合は、この一部の周波数部分のセンサ出力は外乱に起因するものとして扱う。つまり、第1周波数帯域における該一部の周波数部分のレベルが第1のレベルである場合でも人体の動きによるものとして判別せず、該第1の周波数帯域における他の周波数部分のレベルが第1のレベルであることをもって人体の動きを判別する。
【0010】
このように、本発明によれば、ドップラー信号のうち第1の周波数帯域(人体の動きに対応する周波数帯域)に隣接する低い周波数帯域である第2の周波数帯域(封水面の動き等の外乱に対応する周波数帯域)の成分がある場合には、第1の周波数帯域のうち一部の(例えば低い側の)周波数帯域を除外して人体の動きを判別する。つまり、外乱が人体の動きを検出する第1の周波数帯域の一部に影響を及ぼしている可能性がある場合には、その一部の周波数部分を除く周波数帯域で人体の動きを判断する。これにより、便器洗浄バルブの誤作動を少なくしつつ、人体の動きに応じた便器洗浄バルブの制御精度が低下することを回避できる。
【0011】
なお、上記発明において、第2の周波数帯域のレベルが、第1のレベルより大きい第2のレベルであることを条件として、上記他の周波数部分を第1の周波数帯域に再設定し、該再設定された第1の周波数帯域のレベルが第1のレベルであることにより特定動体を判別するようにしてもよい。
【0012】
第2の周波数帯域(外乱に対応する周波数帯域)のレベルが第1のレベルより大きい場合には、外乱が第1の周波数帯域に影響を与えている可能性が高いので、これを条件とすることにより、さらに正確に人体の動きを判断することが可能となる。
【0013】
また、上記発明において、ドップラー信号が第2の周波数帯域の成分を含み、かつ該第2の周波数帯域のレベルが第1のレベルより大きい第2のレベルであり、上記一部の周波数部分のレベルが第1のレベルである場合において、その後に第1の周波数帯域に隣接する高い周波数帯域である第3の周波数帯域の成分が得られないときに、上記他の周波数部分のレベルを第1の周波数帯域に再設定し、該再設定された第1の周波数帯域のレベルが第1のレベルであることにより特定動体を判別するようにしてもよい。
【0014】
第1の周波数帯域によって人体の動きを検出した後に第3の周波数帯域(尿流に対応する周波数帯域)の成分が検出されない場合は、外乱が第1の周波数帯域に影響を与えている可能性が高い。このため、このような場合には、第1の周波数帯域を、もとの第1の周波数帯域における一部の周波数部分を除いた周波数帯域に再設定することにより、正確に人体の動きを判断することが可能となる。
【0015】
すなわち、第1の周波数帯域における一部の周波数部分のレベルが第1のレベルであるというだけでは、該一部の周波数部分の成分が外乱に起因するものか人体の動きに起因するものを確定することが難しい。しかし、その一部の周波数部分の成分が人体の動きに起因したものであれば、その後に尿流に起因する第3又は特定の周波数帯域の成分が出現するはずである。したがって、尿流に起因する成分が得られない場合は、上記一部の周波数部分の成分を外乱に起因するものと扱うことができる。そこで、このことを条件として周波数部分除外処理を行うことで、誤判別や便器洗浄バルブの誤作動をより確実に回避することができる。
【0016】
そして、これらの便器洗浄装置を含む便器システムによれば、人体の動きに応じて正確に洗浄水を便器に供給することができ、無駄な洗浄水の使用を少なくすることができる。
【発明の効果】
【0017】
本発明によれば、ドップラーセンサを用いた便器洗浄装置において、外乱に起因した特定動体の誤判別及び便器洗浄バルブの誤作動を少なくしつつ、特定動体に応じた便器洗浄バルブの制御精度が低下することを回避できる。
【発明を実施するための最良の形態】
【0018】
以下、本発明の実施例について図面を参照しながら説明する。
【実施例1】
【0019】
図1には、本発明の実施例1である便器洗浄装置を内蔵した小便器システムの構成を示す。
【0020】
小便器1の上部には、便器洗浄装置を構成するドップラーセンサ2と制御手段としてのコントローラ3とが収容されている。小便器1の上端蓋4は開閉が可能であり、ドップラーセンサ2及びコントローラ3のメンテナンス作業を容易に行うことができる。
【0021】
小便器1の上部背面側には、小便器1のボール部に洗浄水を供給する給水部5が設けられている。給水部5には、後述する便器洗浄バルブが設けられている。給水部5の下部には、便器洗浄バルブからの洗浄水をボール部内に吐出する吐出口6が設けられている。
【0022】
また、ボール部の下部には、封水を形成するためのトラップ部7と排水口8とが設けられている。
【0023】
ドップラーセンサ2は、マイクロ波やミリ波等の電波を送信する。9はドップラーセンサ2からの電波の送信範囲である。この送信範囲9内で人体10が動いたり排尿がなされたりすると、動体である人体(特定動体)10及び尿11によって電波が反射される。このとき、ドップラー効果により、反射した電波(以下、反射波という)の周波数が送信された電波(以下、送信波という)の周波数に対してずれる。この送信波と反射波との周波数の差に基づいて、人体10の動きや尿流を判別することができる。
【0024】
図2には、ドップラーセンサ2とコントローラ3の構成を示している。ドップラーセンサ2において、21は送信波を出力する送信部であり、22は反射波を受信する受信部である。23は送信波と反射波との周波数の差分に相当する周波数を持つドップラー信号を出力する差分検出部である。
【0025】
ドップラー信号は、以下のドップラー周波数ΔFを有する信号である。
【0026】
ΔF=FS−Fb=2×FS×ν/c …(1)
FS:送信波の周波数(10.525GHz)
Fb:反射波の周波数
ν:動体の移動速度
c:光速(約300×106 m/s)
なお、ドップラーセンサ2は、差分検出部23から出力されたドップラー信号を不図示の増幅器によって増幅して出力するが、以下の説明においてはこの増幅後の信号をドップラー信号という。
【0027】
(1)式から分かるように、動体である人体10及び尿11の移動速度に応じて、ドップラー周波数ΔFが変化する。したがって、ドップラー信号の周波数(ドップラー周波数ΔF)とそのレベルとから、動体が人体10か尿11かを判別することができる。
【0028】
ここで、送信波の周波数が10.525GHzである場合、小便器1に対して接近(又は離反)する人体10の一般的な移動速度に対するドップラー周波数ΔFは、例えば20〜50Hzの周波数帯域となる。また、一般的な尿流速度に対するドップラー周波数ΔFは、例えば50〜150Hzの周波数帯域となる。
【0029】
ただし、ドップラーセンサ2は、排水口8に接続されている下水管内の水圧変動に伴う封水面の動きや便器1に近接したトイレのドアの開閉といった外乱も検出する。封水面の動きに対するドップラー周波数ΔFは、例えば0〜35Hzの周波数帯域となる。つまり、封水面の動きに対応するドップラー信号の周波数帯域と人体10の動きに対するドップラー信号の周波数帯域とが一部重複する場合がある。この周波数帯域の重複によって、封水面の動きが人体10の動きと誤って判別されるおそれがある。
【0030】
コントローラ3は、周波数解析部31と、判別部32と、バルブ駆動部33とにより構成されている。
【0031】
周波数解析部31は、高速フーリエ変換(FFT:Fast Fourier Transform)によって、ドップラーセンサ2から出力されたドップラー信号における所定周波数幅ごとの成分のレベルを解析する。本実施例では、0〜150Hzを5Hzの幅で分割し、各5Hz幅(周波数部分)でのドップラー信号のレベルを解析する。
【0032】
なお、以下の説明において、ドップラーセンサ2から得られるドップラー信号のうち各周波数帯域及び周波数部分の成分を、それら周波数帯域及び周波数部分のドップラー信号という。
【0033】
図3には、ドップラーセンサ2から得られるドップラー信号の周波数解析結果の例を示す。図3において、横軸は周波数を、縦軸はドップラー信号のレベル(出力レベル)を示す。Aで示す周波数帯域(0〜20Hz)は、主として封水面の動きに対応して現れるドップラー信号の周波数帯域(第2の周波数帯域:以下、封水周波数帯域という)である。また、Bで示す周波数帯域(20〜50Hz)は、主として人体の動き(接近及び離反)に対応して現れるドップラー信号の周波数帯域(第1の周波数帯域:以下、人体周波数帯域という)である。
【0034】
さらに、Cで示す周波数帯域(50〜150Hz)は、主として尿流に対応して現れるドップラー信号の周波数帯域(第3の周波数帯域及び特定周波数帯域:以下、尿流周波数帯域という)である。図中の縦棒は、5Hz幅ごとのドップラー信号のレベルを示す。このことは、後述する他の周波数解析結果についても同じである。また、ここにいう周波数帯域の隣接とは、Aで示す周波数帯域(0〜20Hz)とBで示す周波数帯域(20〜50Hz)のように、20Hzを境に分けられて、隣り合っていることを示す。実際にはこのAとBの間に、多少の幅の不感帯域を持っていてもいい。BとCについても同様で、この間に商用電源周波数50Hz、60Hzを含む領域は検知判定領域から除いている。
【0035】
この図では、人体周波数帯域Bにおいてドップラー信号のレベルが人体判別閾値TBよりも高いため、後述する判別部33によって、人体10の動きが判別される。なお、人体判別閾値TBより高いレベルが、請求項にいう「第1のレベル」に相当する。また、本実施例及び後述する実施例2において、「(判別閾値)より高い」は、判別閾値と同じ値を含まなくてもよいし含んでもよいものとする。
【0036】
判別部32は、周波数解析部31によって解析された所定周波数幅ごとのドップラー信号のレベルに基づいて、人体10の動きや尿流11の有無を判別(検出)する。
【0037】
判別部32は、図3に示すようなドップラー信号のレベルが得られた場合、前述したように人体10の動き(ここでは、便器1への接近とする)を判別する。
【0038】
なお、図3では、人体10の動きに伴って封水及び尿流周波数帯域A,Cにおいてもノイズとしてのドップラー信号が現れているが、そのレベルは封水及び尿流判別閾値TA,TCよりも低いため、封水面の動きや尿流としては判別されない。
【0039】
図4には、別のドップラー信号の周波数解析結果の例を示す。この図では、封水周波数帯域Aにおいてドップラー信号のレベルが封水判別閾値TAより高いため、封水面の動きがあると考えられる。しかし、人体周波数帯域Bのうち封水周波数帯域Aに隣接した一部の周波数部分(ここでは、20〜25Hzの周波数部分)においても、封水面の動きに伴うノイズとしてのドップラー信号のレベルが人体判別閾値TBよりも高くなっている。このため、従来では、このノイズとしてのドップラー信号によって人体10の接近があると誤判別されてしまう。
【0040】
そこで、本実施例では、図4に示すように、封水周波数帯域Aにおいて封水判別閾値TAよりも高いレベルのドップラー信号が現れ、かつ人体周波数帯域Bのうち一部の周波数部分B1において人体判別閾値TBよりも高いレベルの(第1のレベルの)ドップラー信号が現れた場合(以下、第1の場合という)は、図5に示すように、人体周波数帯域Bから周波数部分B1を除外する。これにより、この後は、人体周波数帯域Bとして、周波数部分B1を除いた他の周波数部分B2に対応する周波数帯域B′が再設定される。このように人体周波数帯域Bから周波数部分B1を除外する処理を、以下、周波数部分除外処理という。
【0041】
なお、周波数部分除外処理は、人体周波数帯域Bを人体周波数帯域B′に変更する周波数帯域変更処理ということもできる。
【0042】
このような周波数部分除外処理を行うことにより、周波数部分B1のドップラー信号のレベルが人体判別閾値TBより高くても、周波数部分B2(変更後の人体周波数帯域B′)のドップラー信号のレベルは人体判別閾値TBよりも低いので、周波数部分B1のドップラー信号によって人体10の接近があるものと誤判別されてしまうことを回避できる。そして、この後は、変更後の人体周波数帯域B′のドップラー信号のレベルが人体判別閾値TBよりも高い(第1のレベルである)ことに応じて人体10の接近が判別される。
【0043】
なお、図5では、人体周波数帯域Bを人体周波数帯域B′に変更したことに伴って封水周波数帯域Aが周波数部分B1を含むように変更されているが、必ずしも封水周波数帯域Aを周波数部分B1を含むように変更する必要はない。
【0044】
また、図5では、封水周波数帯域Aでの封水判別閾値TAよりも高いレベルのドップラー信号の出現を条件として周波数部分除外処理を行う場合について説明したが、封水周波数帯域Aでのドップラー信号の出現を条件とし、そのドップラー信号のレベルが封水判別閾値TAよりも高いことを条件としなくてもよい。
【0045】
図6には、さらに別のドップラー信号の周波数解析結果の例を示す。この図では、周波数帯域Aにおいてドップラー信号のレベルは封水判別閾値TAよりも低いが、周波数帯域Bのうち周波数部分B1のみのドップラー信号のレベルが人体判別閾値TBよりも高い。一方、実際に人体10の接近がある場合は、図3に示すように、周波数部分B1を含む周波数帯域Bのより広い範囲でドップラー信号のレベルが人体判別閾値TBより高くなることが多いものの、周波数部分B1のみでドップラー信号のレベルが人体判別閾値TBよりも高くなる場合もあり得る。したがって、図6に示すような状態では、周波数部分B1のドップラー信号が封水面の動きによるものか人体10の接近によるものかを明確に判別することができない。
【0046】
しかし、便器1に接近した人体10は、この後排尿をするはずであり、その結果、図6中に一点鎖線で示すように、周波数帯域Cで尿流判別閾値TCよりも高いレベルのドップラー信号が現れるはずである。逆に言えば、尿流判別閾値TCよりも高いレベルのドップラー信号が現れなければ、周波数部分B1のドップラー信号は人体10の接近によるものではなく、封水面の動きによるものとみなすことができる。
【0047】
そこで、本実施例では、周波数帯域Aにおいてドップラー信号が現れ、かつ周波数帯域Bのうち一部の周波数部分B1において人体判別閾値TBよりも高いレベルのドップラー信号が現れた場合において、その後に尿流周波数帯域Cで尿流判別閾値TCよりも高いレベルのドップラー信号が現れないとき(以下、第2の場合という)には、図5にて説明したように、周波数帯域Bから周波数部分B1を除外する周波数部分除外処理(又は周波数帯域変更処理)を行う。
【0048】
つまり、図7の上図に示すように、時刻t1にて周波数部分B1のドップラー信号のレベルが人体判別閾値TBよりも高い場合において、時刻t2までに尿流周波数帯域Cで尿流判別閾値TCよりも高いレベルのドップラー信号が現れた場合には、周波数部分除外処理は行わない。一方、図7の下図に示すように、時刻t1にて周波数部分B1のドップラー信号のレベルが人体判別閾値TBよりも高い場合において、時刻t2までに尿流周波数帯域Cで尿流判別閾値TCよりも高いレベルのドップラー信号が現れない場合には、周波数部分除外処理を行う。
【0049】
これにより、前述した第1の場合(図5)と同様に、周波数部分B1のドップラー信号のレベルが人体判別閾値TBより高くても、周波数部分B2(変更後の人体周波数帯域B′)のドップラー信号のレベルは人体判別閾値TBよりも低いので、周波数部分B1のドップラー信号によって人体10の接近があるものと誤判別されてしまうことを回避できる。そして、この後は、再設定された人体周波数帯域B′のドップラー信号のレベルが人体判別閾値TBよりも高い(第1のレベルである)ことに応じて人体10の接近が判別される。
【0050】
なお、図4に示すようなドップラー信号が得られた場合(第1の場合)でも、上記のように尿流周波数帯域Cでの尿流判別閾値TCより高いレベルのドップラー信号の出現を条件として周波数部分除外処理を行うこともできる。この場合、第1の場合において周波数部分除外処理を行う条件を厳しくすることができるので、その分、周波数部分除外処理をより適正に行うことができる。
【0051】
以上のように、本実施例によれば、第1及び第2の場合のように封水面の動きに起因して周波数部分B1のドップラー信号のレベルが人体判別閾値TBよりも高くても、人体10の接近があるものと誤判別されることを回避できる。
【0052】
従来では、誤判別を回避するために、図8に示すような方法が採られていた。すなわち、図8の左図に示すように、封水面の動きに起因して周波数部分B1で人体判別閾値TBよりも高いレベルのドップラー信号が現れた場合には、右図に示すように、人体周波数帯域Bでの人体判別閾値TBをそれよりも高いTB′に変更する。これにより、周波数部分B1のドップラー信号が人体判別閾値TB′より低くなるため、人体10の接近によるものとして誤判別される可能性を低くすることができる。
【0053】
しかし、人体判別閾値TB′が高く変更されることによって、実際に人体10の接近によって生じた人体周波数帯域Bのドップラー信号のレベルが人体判別閾値TB′よりも低くなる可能性が高くなる。つまり、人体10の動きの判別を失敗してしまう確率が高くなる。
【0054】
これに対し、本実施例では、前述した第1及び第2の場合に、人体判別閾値TBを変更せずに周波数部分B1を人体周波数帯域Bから除外する(人体周波数帯域B′に変更する)ようにしている。このため、実際に人体10の接近によって人体周波数帯域B′でドップラー信号が現れれば、高い確率で人体判別閾値TBよりも高くなる。したがって、人体10の動きの判別を失敗してしまう確率を低く抑えることができ、該判別の精度が低下することを回避できる。
【0055】
なお、判別部32は、人体10の接近を判別した後に、再度人体周波数帯域B(又はB′)のドップラー信号のレベルが人体判別閾値TBより高いことにより、人体10の離反を判別する。人体10の離反を判別する場合には、人体10の接近を判別する場合と人体周波数帯域Bや人体判別閾値TBを異ならせてもよい。
【0056】
図2に示したバルブ駆動部33は、判別部32での判別結果に応じて、便器洗浄バルブ50を制御する。便器洗浄バルブ50としては、電磁バルブ等の電気信号により制御可能なバルブを用いることができる。なお、以下の説明では、便器洗浄バルブ50は電磁バルブとする。バルブ駆動部33は、判別部32で人体10の接近を検出した場合には、便器洗浄バルブ50を所定のプレ洗浄時間の間、開動作させて便器1(ボール部)に洗浄水を供給し、尿石のボール部への堆積をより生じにくくするための、いわゆるプレ洗浄を行う。
【0057】
また、バルブ駆動部33は、判別部32で尿流ありと判別し、さらに人体10が離反したと判別した場合は、便器洗浄バルブ50を所定の本洗浄時間の間、開動作させて便器1(ボール部)に洗浄水を供給し、本洗浄を行う。
【0058】
以下、コントローラ3(判別部32及びバルブ駆動部33)での処理手順について、図9のフローチャートを用いて説明する。この処理は、コントローラ3内の不図示のメモリに格納されたコンピュータプログラムに従って実行される。
【0059】
なお先の説明では、便宜上、判別部32が封水、人体10の動き及び尿流の存在そのものを判別するかのように説明した。しかし、実際には、判別部32は、3つの周波数帯域A,B,Cにおいてドップラー信号のレベルが判別閾値TA,TB,TCよりも高いか否かの判定を、封水、人体10の動き及び尿流の判別処理として行う。
【0060】
まず、ステップ(図にはSと略記する)112では、判別部32は、ドップラーセンサ2からのドップラー信号のうち人体周波数帯域Bにおける一部の周波数部分B1のドップラー信号DBのレベルが人体判別閾値TBよりも高いか否か(第1のレベルであるか否か)を判定する。周波数部分B1は、例えば封水周波数帯域Aに隣接した1又は複数の5Hz幅の周波数部分として設定することができる。なお、前述したように、「人体判別閾値TBよりも高いか否か」は、「人体判別閾値TB以上か否か」としてもよい。このことは、後述する他のドップラー信号と判別閾値との大小関係の判定でも同じである。ドップラー信号DBのレベルが人体判別閾値TBよりも高い場合はステップ113に進み、人体判別閾値TBよりも低い場合は本ステップを繰り返す。
【0061】
ステップ113では、判別部32は、ドップラーセンサ2からのドップラー信号に、封水周波数帯域Aのドップラー信号DAが含まれているか否かを判定する。ドップラー信号DAが含まれている場合は、さらに封水周波数帯域Aのドップラー信号DAのレベルが封水判別閾値TAよりも高いか否かを判定する。封水判別閾値TAよりも高い場合はステップ114に進み、封水判別閾値TAよりも低い場合(及びドップラー信号DAが含まれていない場合)はステップ117に進む。
【0062】
ステップ114では、判別部32は、人体周波数帯域Bから周波数部分B1を除いた他の周波数部分(B2)を新たな人体周波数帯域B(B′)として再設定する。言い換えれば、もとの人体周波数帯域Bから周波数部分B1を除外する周波数部分除外処理(又は人体周波数帯域Bを周波数部分B2に対応する人体周波数帯域B′に変更する周波数帯域変更処理)を行う。そして、ステップ115に進む。
【0063】
ステップ115では、判別部32は、ステップ114で再設定された人体周波数帯域Bのドップラー信号DBのレベルが人体判別閾値TBよりも高いか否かを判定する。ドップラー信号DBのレベルが人体判別閾値TBよりも高い場合は、人体10の接近があるものとして、ステップ117に進む。一方、ドップラー信号DBのレベルが人体判別閾値TBよりも低い場合は、ステップ112で得られた人体判別閾値TBよりも高いレベルのドップラー信号DBが封水面の動きに起因したものであったとして、ステップ116に進む。
【0064】
ステップ116では、判別部32は、人体周波数帯域Bをもとの(ステップ114で再設定される前の)人体周波数帯域Bにリセットする(初期値に戻す)。そして、ステップ112に戻る。
【0065】
ステップ117では、バルブ駆動部33は、人体10の接近に応じて便器洗浄バルブ50を開動作させるとともに、判別部32は、第1の所定時間を計測するための第1タイマのカウントをスタート(ON)する。これにより、プレ洗浄が開始される。
【0066】
続いてステップ118では、バルブ駆動部33は、第1タイマによる第1の所定時間の計測が終了したか否かを判定する。計測が終了していない場合は、再度このステップを繰り返す。一方、計測が終了した場合は、ステップ119に進み、便器洗浄バルブ50を閉動作させる。これにより、プレ洗浄が終了される。
【0067】
次にステップ120では、判別部32は、第2の所定時間を計測するための第2タイマのカウントをスタート(ON)する。
【0068】
そして、ステップ121では、判別部32は、尿流周波数帯域Cにおいて、尿流判別閾値TCよりも高いレベルのドップラー信号DCが得られたか否かを判定する。この判定は、人体周波数帯域Bにおいて人体判別閾値TBよりも高いレベルのドップラー信号DBが得られた後に、尿流が生じたか否かの判定である。言い換えれば、人体判別閾値TBよりも高いレベルのドップラー信号DBが人体10の接近によるものか否かの判定である。尿流判別閾値TCよりも高いレベルのドップラー信号DCが得られた場合はステップ124に進み、尿流判別閾値TCよりも高いレベルのドップラー信号DCが得られない場合はステップ122に進む。
【0069】
ステップ122では、判別部32は、第2タイマによる第2の所定時間の計測が終了したか否かを判定する。計測が終了していない場合は、ステップ121に戻る。一方、計測が終了した場合は、ステップ115で判定した人体判別閾値TBよりも高いレベルのドップラー信号DBが、封水面の動きに起因したものであるとして、ステップ123に進む。
【0070】
ステップ123では、判別部32は、人体周波数帯域Bから周波数部分B1を除いた他の周波数部分(B2)を新たな人体周波数帯域B(B′)として再設定する。または、封水判別閾値TAをステップ113で検出された封水周波数帯域Aのドップラー信号DAのレベルまで低くなるように変更する。そして、ステップ112に戻る。
【0071】
ステップ124では、判別部32は、ドップラー信号DCが尿流判別閾値TCよりも低くなったか否か(排尿が終了したか否か)を判定する。ドップラー信号DCが尿流判別閾値TCよりも低くなっていない場合(まだ排尿が続いている場合)は本ステップを繰り返す。また、ドップラー信号DCが尿流判別閾値TCよりも低くなった場合はステップ125に進む。
【0072】
ステップ125では、判別部32は、人体周波数帯域Bのドップラー信号DBのレベルが人体判別閾値TBよりも高いか否かを判定する。この判定での人体周波数帯域B及び人体判別閾値TBは、ステップ115での人体10の接近判別で用いた人体周波数帯域B及び人体判別閾値TBと異ならせてもよい。人体判別閾値TBよりも高いレベルのドップラー信号DBが得られた場合は、人体10が離反したものとして、ステップ126に進む。一方、人体判別閾値TBよりも高いレベルのドップラー信号DBが得られない場合(まだ人体10が離反していない場合)は、このステップを繰り返す。
【0073】
ステップ126では、バルブ駆動部33は、人体10の離反判別に応じて便器洗浄バルブ50を開動作させる。また、判別部32は、第3の所定時間(本洗浄時間)を計測するための第3タイマのカウントをスタート(ON)する。これにより、本洗浄が開始される。
【0074】
続いてステップ127では、判定部32は、第3タイマによる第3の所定時間の計測が終了したか否かを判定する。計測が終了していない場合は、再度このステップを繰り返す。一方、計測が終了した場合は、ステップ128に進み、便器洗浄バルブ50を閉動作させる。そして、ステップ129に進む。
【0075】
ステップ129では、判別部32は、ステップ13で人体周波数帯域Bが再設定された場合は、その人体周波数帯域Bをもとの人体周波数帯域Bにリセットする(初期値に戻す)。そして、ステップ112に戻る。
【0076】
以上説明したように、本実施例では、封水周波数帯域Aのドップラー信号(封水判別閾値TAより高いレベルのドップラー信号)が得られ、かつ人体周波数帯域Bにおける一部の周波数部分B1において人体判別閾値TBより高いレベルのドップラー信号が得られた場合(第1の場合)には、この周波数部分B1のドップラー信号は封水面の動き(外乱)に起因するものとして扱う。
【0077】
また、本実施例では、封水周波数帯域Aのドップラー信号(封水判別閾値TAより低いレベルのドップラー信号)が得られ、かつ人体周波数帯域Bにおける一部の周波数部分B1において人体判別閾値TBより高いレベルのドップラー信号が得られた場合において、その後に尿流周波数帯域Cでのドップラー信号が得られないとき(第2の場合)も、周波数部分B1でのセンサ出力を封水面の動き(外乱)に起因するものと扱う。そして、上記第1及び第2の場合に、人体周波数帯域Bから周波数部分B1を除外(人体周波数帯域Bを再設定)する。言い換えれば、該周波数部分B1のドップラー信号を人体10の動き判別には使用しない。
【0078】
このように、本実施例では、人体10の動き判別を行うためのドップラー信号レベル(人体判別閾値TB)を変更することなく外乱に起因したドップラー信号を除外して人体10の動判別を行うので、外乱に起因した人体10の動きの誤判別及び便器洗浄バルブ50の誤作動を少なくしつつ、人体10の動きに応じた便器洗浄バルブ50の制御精度が低下することも回避できる。
【実施例2】
【0079】
図10には、本発明の実施例2である便器洗浄装置の構成を示している。本実施例において、ドップラーセンサ2は、実施例1で説明したものと同じものである。
【0080】
コントローラ103は、A/D変換器135と、デジタル(D)フィルタ131A,131B,131Cと、判別部132と、バルブ駆動部133とを有する。
【0081】
A/D変換器135は、ドップラーセンサ2からのドップラー信号(アナログ信号)をデジタル信号に変換する。
【0082】
デジタルフィルタ131A,131B,131Cはそれぞれ、デジタル化されたドップラー信号のうち、封水周波数帯域A、人体周波数帯域B及び尿流周波数帯域Cでの成分を通過させる。
【0083】
ここで、デジタルフィルタ131Bは、図11の右側の表に示すように、ドップラー信号の通過周波数帯域としての人体周波数帯域Bを、高周波数側が100Hzに固定されて低周波側が5Hzずつ高くなる複数の周波数帯域(ステップ1〜7)で切り換えることができる。
【0084】
判別部132は、デジタルフィルタ131A,131B,131Cからの出力(ドップラー信号)に基づいて、実施例1の判別部32と基本的に同じ処理を行う。ただし、判別部132は、周波数部分除外処理(又は周波数帯域変更処理)として、デジタルフィルタ131Bにおける通過周波数帯域を上記ステップ1〜7の間で切り換えるように該フィルタ131Bを制御する。
【0085】
例えば、図11の左図のように、封水周波数帯域Aが0〜20Hzの帯域に設定され、人体周波数帯域Bが20〜100Hzのステップ3に設定されているとする。このとき、封水周波数帯域Aにて封水判別閾値TAを超えるドップラー信号が現れ、かつ人体周波数帯域Bのうち一部の周波数部分B1(20〜35Hz)にて人体判別閾値TBを超えるドップラー信号が現れた場合(第1の場合)には、判別部132は、デジタルフィルタ131Bに対して、図11の中央図に示すように、人体周波数帯域Bを35〜100Hzのステップ6である人体周波数帯域B′に切り換える(再設定する)よう指示する。
【0086】
これにより、実施例1での人体周波数帯域Bの再設定(周波数部分除外処理又は周波数帯域変更処理)と同じ処理がなされることになる。なお、ここでは封水周波数帯域Aは変更していないが、周波数部分B1を含むように封水周波数帯域Aを変更してもよい。
【0087】
また、図示はしないが、判別部132は、実施例1で説明した第2の場合においても同様に、デジタルフィルタ131Bにおける通過周波数帯域を切り換える。
【0088】
このようにデジタルフィルタ131A,131B,131Cを用いることにより、実施例1のようなFFTによる周波数解析を行う場合に比べて、より簡単にかつ速く、周波数帯域A,B,Cでのドップラー信号を得ることができる。
【0089】
図12には、本実施例におけるコントローラ3(判別部132及びバルブ駆動部133)での処理手順を示している。この処理は、コントローラ103内の不図示のメモリに格納されたコンピュータプログラムに従って実行される。
【0090】
まず、ステップ210では、判別部132は、尿流周波数帯域Cにおいて得られたドップラー信号DCが尿流判別閾値TCよりも高いレベルか否かを判定する。ドップラー信号DCが尿流閾値TCよりも高い場合はステップ211に進む。また、ドップラー信号DCが尿流周波数帯域Cよりも低い場合はステップ212に進む。
【0091】
ステップ211では、人体周波数帯域Bの設定範囲を、図11に示す表中で1つ小さいステップに切り換える(再設定する)。例えば、人体周波数帯域Bの設定範囲を、図11に示すステップ2からステップ1に切り換える。そして、後述するステップ224に進む。
【0092】
ステップ212では、判別部132は、ドップラーセンサ2からのドップラー信号のうち人体周波数帯域Bにおける一部の周波数部分B1のドップラー信号DBのレベルが人体判別閾値TBよりも高いか否か(第1のレベルであるか否か)を判定する。人体周波数帯域Bの初期設定範囲は、図11に示すステップ1である。また、周波数部分B1は、例えば封水周波数帯域Aに隣接した1又は複数の5Hz幅の周波数部分として設定することができる。ドップラー信号DBのレベルが人体判別閾値TBよりも高い場合はステップ213に進み、人体判別閾値TBよりも低い場合はステップ210に戻る。
【0093】
ステップ213では、判別部132は、ドップラーセンサ2からのドップラー信号に、封水周波数帯域Aのドップラー信号DAが含まれているか否かを判定する。ドップラー信号DAが含まれている場合は、さらに封水周波数帯域Aのドップラー信号DAのレベルが封水判別閾値TAよりも高いか否かを判定する。封水判別閾値TAよりも高い場合はステップ214に進み、封水判別閾値TAよりも低い場合(及びドップラー信号DAが含まれていない場合)はステップ217に進む。
【0094】
ステップ214では、判別部132は、人体周波数帯域Bの設定範囲を、図11に示す表中で1大きいステップに切り換える(再設定する)。例えば、人体周波数帯域Bの設定範囲を、図11に示すステップ1からステップ2に切り換える。そして、ステップ215に進む。
【0095】
ステップ215では、判別部132は、ステップ214で再設定された人体周波数帯域Bのドップラー信号DBのレベルが人体判別閾値TBよりも高いか否かを判定する。ドップラー信号DBのレベルが人体判別閾値TBよりも高い場合は、人体10の接近があるものとして、ステップ217に進む。一方、ドップラー信号DBのレベルが人体判別閾値TBよりも低い場合は、ステップ212で得られた人体判別閾値TBよりも高いレベルのドップラー信号DBが封水面の動きに起因したものであったとして、ステップ210に戻る。
【0096】
ステップ217では、バルブ駆動部133は、人体10の接近に応じて便器洗浄バルブ50を開動作させるとともに、判別部132は、第1の所定時間を計測するための第1タイマのカウントをスタート(ON)する。これにより、プレ洗浄が開始される。
【0097】
続いてステップ218では、バルブ駆動部133は、第1タイマによる第1の所定時間の計測が終了したか否かを判定する。計測が終了していない場合は、再度このステップを繰り返す。一方、計測が終了した場合は、ステップ219に進み、便器洗浄バルブ50を閉動作させる。これにより、プレ洗浄が終了される。
【0098】
次にステップ220では、判別部132は、第2の所定時間を計測するための第2タイマのカウントをスタート(ON)する。
【0099】
そして、ステップ221では、判別部132は、尿流周波数帯域Cにおいて、尿流判別閾値TCよりも高いレベルのドップラー信号DCが得られたか否かを判定する。この判定は、人体周波数帯域Bにおいて人体判別閾値TBよりも高いレベルのドップラー信号DBが得られた後に、尿流が生じたか否かの判定である。言い換えれば、人体判別閾値TBよりも高いレベルのドップラー信号DBが人体10の接近によるものか否かの判定である。尿流判別閾値TCよりも高いレベルのドップラー信号DCが得られた場合はステップ224に進み、尿流判別閾値TCよりも高いレベルのドップラー信号DCが得られない場合はステップ222に進む。
【0100】
ステップ222では、判別部132は、第2タイマによる第2の所定時間の計測が終了したか否かを判定する。計測が終了していない場合は、ステップ221に戻る。一方、計測が終了した場合は、ステップ215で判定した人体判別閾値TBよりも高いレベルのドップラー信号DBが、封水面の動きに起因したものであるとして、ステップ223に進む。
【0101】
ステップ223では、判別部132は、人体周波数帯域Bの設定範囲を、図11に示す表中で1大きいステップに切り換える(再設定する)。すなわち、人体周波数帯域Bにおける一部の周波数部分B1において人体判別閾値TBより高いレベルのドップラー信号が得られた場合において、その後に尿流周波数帯域Cでのドップラー信号が得られないときは、周波数部分B1でのセンサ出力を封水面の動き(外乱)に起因するものと扱い、人体周波数帯域Bから周波数部分B1を除く処理を行う。そして、ステップ210に戻る。
【0102】
また、判別部132は、ステップ221で尿流判別閾値TCよりも高いレベルのドップラー信号DCが得られた場合は、ステップ224に進む。
【0103】
ステップ224では、判別部132は、ドップラー信号DCが尿流判別閾値TCよりも低くなったか否か(排尿が終了したか否か)を判定する。ドップラー信号DCが尿流判別閾値TCよりも低くなっていない場合(まだ排尿が続いている場合)は本ステップを繰り返す。また、ドップラー信号DCが尿流判別閾値TCよりも低くなった場合はステップ225に進む。
【0104】
ステップ225では、判別部132は、人体周波数帯域Bのドップラー信号DBのレベルが人体判別閾値TBよりも高いか否かを判定する。この判定での人体周波数帯域B及び人体判別閾値TBは、ステップ215での人体10の接近判別で用いた人体周波数帯域B及び人体判別閾値TBと異ならせてもよい。人体判別閾値TBよりも高いレベルのドップラー信号DBが得られた場合は、人体10が離反したものとして、ステップ226に進む。一方、人体判別閾値TBよりも高いレベルのドップラー信号DBが得られない場合(まだ人体10が離反していない場合)は、このステップを繰り返す。
【0105】
ステップ226では、バルブ駆動部133は、人体10の離反判別に応じて便器洗浄バルブ50を開動作させる。また、判別部132は、第3の所定時間(本洗浄時間)を計測するための第3タイマのカウントをスタート(ON)する。これにより、本洗浄が開始される。
【0106】
続いてステップ227では、判定部132は、第3タイマによる第3の所定時間の計測が終了したか否かを判定する。計測が終了していない場合は、再度このステップを繰り返す。一方、計測が終了した場合は、ステップ228に進み、便器洗浄バルブ50を閉動作させる。そして、ステップ210に戻る。
【0107】
本実施例でも、人体10の動き判別を行うためのドップラー信号レベル(人体判別閾値TB)を変更することなく外乱に起因したドップラー信号を除外して人体10の動判別を行うので、外乱に起因した人体10の動きの誤判別及び便器洗浄バルブ50の誤作動を少なくしつつ、人体10の動きに応じた便器洗浄バルブ50の制御精度が低下することも回避できる。
【0108】
以上説明した各実施例は代表的な例にすぎず、本発明の実施に際しては、各実施例に対して種々の変形や変更が可能である。
【0109】
例えば、上記各実施例では、封水周波数帯域Aのドップラー信号が得られたことを条件として周波数部分除外処理を行う場合について説明した。しかし、封水周波数帯域Aのドップラー信号が得られない場合でも、人体周波数帯域Bにおける一部の周波数部分B1において人体判別閾値TBよりも高いレベルのドップラー信号が得られ、その後に尿流周波数帯域Cのドップラー信号が得られないことを条件として、人体周波数帯域Bの周波数部分除外処理(又は周波数帯域変更処理)を行うようにしてもよい。
【0110】
これにより、封水面の動きによって、封水周波数帯域Aのドップラー信号は現れないが周波数部分B1のドップラー信号が現れたような場合において、周波数部分B1を人体周波数帯域Bから除外することができ、封水面の動きを人体10の動きと誤判別することを回避できる。
【0111】
さらに、本実施例では、上記第1及び第2の場合に、人体周波数帯域Bから周波数部分B1を除外する(人体周波数帯域Bを他の周波数帯域B′に変更する)場合について説明した。しかし、人体周波数帯域Bを変更せずに、人体周波数帯域Bのドップラー信号のうち周波数部分B1のドップラー信号を無効とし、他の周波数部分B2のドップラー信号のみを用いて人物10の動き判別を行うようにしてもよい。
【図面の簡単な説明】
【0112】
【図1】本発明の実施例1である便器洗浄装置を備えた便器システムを示す概略図。
【図2】実施例1の便器洗浄装置の構成を示すブロック図。
【図3】実施例1におけるドップラー信号の周波数解析結果の例を示す図。
【図4】実施例1におけるドップラー信号の周波数解析結果の他の例を示す図。
【図5】実施例1における周波数部分除外処理を示す図。
【図6】実施例1におけるドップラー信号の周波数解析結果のさらに他の例を示す図。
【図7】実施例1における人体検出と尿流検出との関係を示すタイムチャート。
【図8】従来の人体判別閾値の変更処理を示す図。
【図9】実施例1での処理手順を示すフローチャート。
【図10】本発明の実施例2である便器洗浄装置の構成を示すブロック図。
【図11】実施例2における周波数帯域変更処理を示す図。
【図12】実施例2での処理手順を示すフローチャート。
【符号の説明】
【0113】
1 小便器
2 ドップラーセンサ
3,103 コントローラ
5 給水部
9 センサ検出範囲
7 トラップ部
8 排水口
10 人体
11 尿
21 送信部
22 受信部
23 差分検出部
31 周波数解析部
32,132 判別部
33,133 バルブ駆動部
50 便器洗浄バルブ
131A,131B,131C デジタルフィルタ
【特許請求の範囲】
【請求項1】
便器への洗浄水の供給を制御する便器洗浄バルブと、
電波を送信し、動体によって反射された電波を受信してドップラー信号を生成するドップラーセンサと、
前記ドップラー信号における第1の周波数帯域のレベルが第1のレベルであることにより特定動体を判別し、該判別に応じて前記便器洗浄バルブを制御する制御手段とを有し、
前記制御手段は、前記ドップラー信号が前記第1の周波数帯域に隣接する低い周波数帯域である第2の周波数帯域の成分を含み、かつ前記第1の周波数帯域における一部の周波数部分のレベルが前記第1のレベルである場合は、前記第1の周波数帯域における該一部の周波数部分を除く他の周波数部分を第1の周波数帯域に再設定し、該再設定された第1の周波数帯域のレベルが前記第1のレベルであることにより前記特定動体を判別することを特徴とする便器洗浄装置。
【請求項2】
前記制御手段は、前記ドップラー信号が前記第2の周波数帯域の成分を含み、かつ該第2の周波数帯域のレベルが前記第1のレベルより大きい第2のレベルであり、前記一部の周波数部分のレベルが前記第1のレベルである場合に、前記他の周波数部分を第1の周波数帯域に再設定し、該再設定された第1の周波数帯域のレベルが前記第1のレベルであることにより前記特定動体を判別することを特徴とする請求項1に記載の便器洗浄装置。
【請求項3】
前記制御手段は、前記ドップラー信号が前記第2の周波数帯域の成分を含み、かつ該第2の周波数帯域のレベルが前記第1のレベルより大きい第2のレベルであり、前記一部の周波数部分のレベルが前記第1のレベルである場合において、その後に前記第1の周波数帯域に隣接する高い周波数帯域である第3の周波数帯域の成分が得られないときに、前記他の周波数部分を第1の周波数帯域に再設定し、該再設定された第1の周波数帯域のレベルが前記第1のレベルであることにより前記特定動体を判別することを特徴とする請求項1に記載の便器洗浄装置。
【請求項4】
前記制御手段は、前記第2の周波数帯域のレベルが前記第2のレベルより低く、前記再設定された第1の周波数部分のレベルが前記第1のレベルである場合において、その後に前記第1の周波数帯域に隣接する高い周波数帯域である第3の周波数帯域の成分が得られないときに、前記他の周波数部分のレベルを第1の周波数帯域に再設定し、該再設定された第1の周波数帯域のレベルが前記第1のレベルであることにより前記特定動体を判別することを特徴とする請求項2に記載の便器洗浄装置。
【請求項5】
請求項1から4のいずれか1つに記載の便器洗浄装置と、
前記便器洗浄バルブからの洗浄水によって洗浄される便器とを含むことを特徴とする便器システム。
【請求項1】
便器への洗浄水の供給を制御する便器洗浄バルブと、
電波を送信し、動体によって反射された電波を受信してドップラー信号を生成するドップラーセンサと、
前記ドップラー信号における第1の周波数帯域のレベルが第1のレベルであることにより特定動体を判別し、該判別に応じて前記便器洗浄バルブを制御する制御手段とを有し、
前記制御手段は、前記ドップラー信号が前記第1の周波数帯域に隣接する低い周波数帯域である第2の周波数帯域の成分を含み、かつ前記第1の周波数帯域における一部の周波数部分のレベルが前記第1のレベルである場合は、前記第1の周波数帯域における該一部の周波数部分を除く他の周波数部分を第1の周波数帯域に再設定し、該再設定された第1の周波数帯域のレベルが前記第1のレベルであることにより前記特定動体を判別することを特徴とする便器洗浄装置。
【請求項2】
前記制御手段は、前記ドップラー信号が前記第2の周波数帯域の成分を含み、かつ該第2の周波数帯域のレベルが前記第1のレベルより大きい第2のレベルであり、前記一部の周波数部分のレベルが前記第1のレベルである場合に、前記他の周波数部分を第1の周波数帯域に再設定し、該再設定された第1の周波数帯域のレベルが前記第1のレベルであることにより前記特定動体を判別することを特徴とする請求項1に記載の便器洗浄装置。
【請求項3】
前記制御手段は、前記ドップラー信号が前記第2の周波数帯域の成分を含み、かつ該第2の周波数帯域のレベルが前記第1のレベルより大きい第2のレベルであり、前記一部の周波数部分のレベルが前記第1のレベルである場合において、その後に前記第1の周波数帯域に隣接する高い周波数帯域である第3の周波数帯域の成分が得られないときに、前記他の周波数部分を第1の周波数帯域に再設定し、該再設定された第1の周波数帯域のレベルが前記第1のレベルであることにより前記特定動体を判別することを特徴とする請求項1に記載の便器洗浄装置。
【請求項4】
前記制御手段は、前記第2の周波数帯域のレベルが前記第2のレベルより低く、前記再設定された第1の周波数部分のレベルが前記第1のレベルである場合において、その後に前記第1の周波数帯域に隣接する高い周波数帯域である第3の周波数帯域の成分が得られないときに、前記他の周波数部分のレベルを第1の周波数帯域に再設定し、該再設定された第1の周波数帯域のレベルが前記第1のレベルであることにより前記特定動体を判別することを特徴とする請求項2に記載の便器洗浄装置。
【請求項5】
請求項1から4のいずれか1つに記載の便器洗浄装置と、
前記便器洗浄バルブからの洗浄水によって洗浄される便器とを含むことを特徴とする便器システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2009−84791(P2009−84791A)
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願番号】特願2007−251987(P2007−251987)
【出願日】平成19年9月27日(2007.9.27)
【出願人】(000010087)TOTO株式会社 (3,889)
【Fターム(参考)】
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願日】平成19年9月27日(2007.9.27)
【出願人】(000010087)TOTO株式会社 (3,889)
【Fターム(参考)】
[ Back to top ]