
信号処理回路
【課題】不要波を送信する目標の距離を追跡する際、不要波の受信を高精度で検出でき、目標距離の追跡を行える信号処理回路を提供する。
【解決手段】反射波を含む電波を受信検波する送受信部と、レンジゲート、進みゲート、遅れゲート、2個の前段追加ゲート及び2個の後段追加ゲートを発生させるゲート発生部2と、これらのゲートを用いて抽出された受信信号を周波数解析して得たゲート情報に基づき目標距離の距離誤差を計算し、ゲート情報を記憶部に記憶する距離誤差計算部18と、前段追加ゲート及び後段追加ゲートの各信号レベルと閾値とを比較して不要波の受信を検出する不要波検出部17と、受信検出後不要波が消失するまでの時間を予測する時間予測部20とを備え、距離誤差計算部18は不要波の受信が検出される以前に計算したゲート情報を用いて距離誤差を計算する。
【解決手段】反射波を含む電波を受信検波する送受信部と、レンジゲート、進みゲート、遅れゲート、2個の前段追加ゲート及び2個の後段追加ゲートを発生させるゲート発生部2と、これらのゲートを用いて抽出された受信信号を周波数解析して得たゲート情報に基づき目標距離の距離誤差を計算し、ゲート情報を記憶部に記憶する距離誤差計算部18と、前段追加ゲート及び後段追加ゲートの各信号レベルと閾値とを比較して不要波の受信を検出する不要波検出部17と、受信検出後不要波が消失するまでの時間を予測する時間予測部20とを備え、距離誤差計算部18は不要波の受信が検出される以前に計算したゲート情報を用いて距離誤差を計算する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は信号処理回路に関し、例えばこの信号処理回路が搭載される飛翔体が目標を距離追跡し続けるための受信ゲートの位置の設け方に関するものである。
【背景技術】
【0002】
スプリットゲート方式により移動目標との相対距離を算出する装置では、信号処理回路が目標探知距離を決定するためのゲート(ゲート信号)を発生させて、時間軸上で目標からの反射波が帰って来るであろう時間にこのゲートのゲート幅の中央位置を合わせた状態でこの反射波を待受けしている。この信号処理回路は、目標距離までの往復時間に相当するレンジゲートであるM(Middle)ゲートの位置を設定し、検波出力された受信信号を、進みゲートであるE(Early)ゲートと、遅れゲートであるL(Late)ゲートとを同時に通過させて、この受信信号がMゲートの前後いずれにずれているかを計算し、これらのEゲート及びMゲートからの各出力信号の電圧を用いて距離誤差を算出するようにしている。信号処理回路は、この距離誤差とMゲートの位置とを加算することによって目標までの距離を特定している。
【0003】
飛翔体と目標との距離は、飛翔体から送信される電波が目標において反射されて、再び飛翔体に戻ってくるまでの時間に基づいて計算される。この戻ってきた電波は、飛翔体に設けられた目標追跡装置の信号処理回路が生成するゲートが持続している時間だけ受信処理される。
【0004】
信号処理回路は、Mゲート、Eゲート及びLゲートの3つのゲートが重なり合うようにこれらのゲートの位置を設定している。Mゲートの位置は、目標から戻ってきた電波の受信時間が、このMゲートが開いている時間の中心に来るように計算されて設定されている。Mゲートが開き始めた時刻をt、このMゲートが開いている時間をTとすると、Eゲートは、t−T/2からt+T/2までの間、ゲートが開くように設定されている。Lゲートは、t+T/2からt+3T/2までの間、ゲートが開くように設定されている。この3つのゲートから出力される受信信号の電圧により、これらのゲートのうちの受信電力が最も大きいゲートを特定し、どこのゲートに反射波が戻ってきたのかが計算される。これより、予測していた距離と実際の距離との距離誤差が計算される。
【0005】
距離追跡に関する技術としては、追跡レーダの距離系の追跡に使用する距離追跡装置が知られている(例えば特許文献1参照)。この特許文献1は、距離追跡装置が、検出目標が複数の場合、その検出された目標のレンジビン番号を比較し、最も小さいレンジビン番号すなわち最も近接した目標に対してゲートの中心位置を距離追跡部に指示するプロセッサを備えている点を開示している。
【0006】
近年、不要波を送信する目標が出現している。ECM(Electric Counter Measures)の手段の一つとして、目標が不要波を放射することにより、目標へ向かう飛翔体のレーダ機能を混乱させる手段が使われるようになってきている。目標からの不要波には、レーダ波が反射したタイミングとずれたタイミングで放射される電波等が含まれる。この不要波を、信号処理回路が目標で反射された電波と認識してしまうと、距離誤差の計算結果が不正確になり距離追跡ができなくなる。
【0007】
目標からの反射波と不要波とが重なって受信されたときに、時間領域においてこれらの反射波及び不要波を分離する機能を持つ信号処理回路を作成することはハードウェアの規模が大型化するため困難である。
【0008】
そこで、従来、不要波が受信されたことを周波数領域において検出する機能を持つ信号処理回路が使われている。この信号処理回路は、反射波のドップラシフト周波数を計算し、このドップラシフト周波数と、目標の距離との相関の度合いを計算する機能を有する。この相関の計算は、不要波が受信されていない間はドップラシフト周波数と目標距離との相関がとれており、不要波が受信されている間はこの相関がとれていないということを利用した計算である。相関の計算を行う回路は、ドップラシフト周波数と、目標距離あるいは距離誤差との相関の度合いを算出し、この相関の度合いが劣化した場合、相関がとれなくなったと判定し、不要波が受信されたことを検出するようにしている。
【特許文献1】特開平6−138222号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、目標からの反射波の受信信号のレベルは変動するため、距離誤差の検出精度は、ドップラシフト周波数の検出精度に比べて元々悪い。ドップラシフト周波数の検出精度を上げることは帯域に対するサンプル数を増やすことによって可能である。一方、距離誤差の検出は受信ゲートのゲート幅に基づくものであり、この受信ゲートを用いた検出では距離自体の精度の分解能を高くすることができないため、距離誤差の検出精度を上げることは難しい。
【0010】
ドップラシフト周波数と距離誤差との相関の度合いを測る手法は、一例として、ドップラシフト周波数と目標距離との差を累積的に加算していき、この累積値が予め決めておいた閾値を超えた場合、判定手段が相関の度合いが劣化したと判定するものである。ところが、この累積値がある程度大きくなるまでには時間がかかる。不要波が受信されたことを信号処理回路が判定できない場合がある。信号処理回路が不要波が受信されたことを検出した後、再度目標追跡をし直す処理を行う必要があり、その上この目標追跡をすぐに行えないことがある。この場合、信号処理回路が目標を捉えることは難しい。不要波が受信されたことを検出する手法として、相関の度合いを測る手法では、高い精度で検出を行えず、不要波の検出に時間を要することがある。
【0011】
本発明は、上記事情を考慮してなされたもので、不要波を送信する目標の距離を追跡する信号処理回路において、不要波が受信されたことを高い精度で検出できるようにし、且つ目標距離の追跡を行える信号処理回路を提供することを目的とする。
【課題を解決するための手段】
【0012】
このような課題を解決するため、本発明の一態様によれば、搬送波を所定のパルス幅のパルス信号でパルス変調しパルス変調波を送信し、目標からの反射波を含む電波を受信検波する送受信部と、この送受信部からの検波出力に基づき、このパルス幅に相当する時間の受信信号を抽出するためのレンジゲート、それぞれこのレンジゲートの前後に位置する進みゲート及び遅れゲート、それぞれがこのレンジゲートのゲート幅を有し前記レンジゲートの開始位置の前方から始まりこの開始位置で終わる複数の前段追加ゲート、及びそれぞれがこのゲート幅を有し前記レンジゲートの終了位置から始まりこの終了位置よりも後方で終わる複数の後段追加ゲートを発生させるゲート発生部と、これらのレンジゲート、進みゲート、遅れゲート、複数の前段追加ゲート及び複数の後段追加ゲートを用いて抽出された受信信号を周波数解析してゲート情報を求め、このゲート情報に基づき目標距離の距離誤差を計算し、前記ゲート情報を記憶部に記憶する距離誤差計算部と、前記複数の前段追加ゲートの信号レベル及び前記複数の後段追加ゲートの信号レベルと、予め保持する各閾値とを比較することにより、前記目標からの不要波の受信を検出する不要波検出部と、前記複数の前段追加ゲートの信号レベル及び前記複数の後段追加ゲートの信号レベルと、これらの前段追加ゲートの位置及びこれらの後段追加ゲートの位置とに基づいて、この不要波の受信の検出後、前記不要波が消失するまでの時間を予測する時間予測部と、を備え、この時間予測部が予測したこの時間の情報が前記距離誤差計算部に通知されると、この距離誤差計算部は前記不要波の受信が検出される以前に計算したゲート情報を前記記憶部から読出しこのゲート情報を用いて前記距離誤差を計算することを特徴とする信号処理回路が提供される。
【発明の効果】
【0013】
本発明によれば、例えば目標距離の追跡に用いられる信号処理回路が、この目標から不要波が放射されても、目標距離の追跡を高い精度で行うことができるようになる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施の形態に係る信号処理回路について、図1乃至図3を参照しながら説明する。尚、各図において同一箇所については同一の符号を付すとともに、重複した説明は省略する。
【0015】
本実施形態に係る信号処理回路は、飛翔体に搭載されてこの飛翔体と移動目標との距離を算出する装置に設けられている。この装置は例えば目標追跡装置であり、パルス状の送信波をパルス繰返し周期で繰返し送信するとともに、目標において反射されたこの送信波についての反射波を検波しIQ信号を出力する送受信部と、これらのIQ信号について高速サンプリング処理や移動平均処理を行い、M、E、Lの3つのゲート及び後述する4つの追加ゲートを発生させて、これらの受信ゲートで得られた信号電圧により目標との相対距離を算出する目標距離算出部とを備えている。この信号処理回路はこの目標距離算出部に用いられている。
【0016】
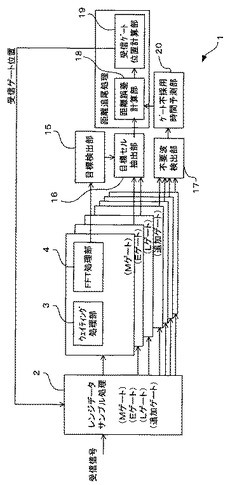
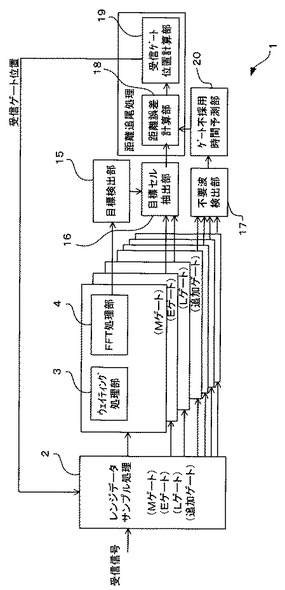
図1は本実施形態に係る信号処理回路のブロック図である。信号処理回路1は、図示しない受信部から検波出力された受信信号をAD変換し、AD変換出力されたデータのうちの所定個数のデータについてゲート毎の移動平均処理を行うことにより7つの受信ゲートを生成するとともに、このAD変換出力されたデータをパルス繰返し周期毎にサンプリングし、ゲート毎にN個(例えば2000個、4000個)のサンプリング結果を取得するレンジデータサンプル処理部(ゲート発生部)2と、それぞれこのN個のサンプリング結果に窓関数を掛け合わす重み付け演算を行う7つのウェイティング処理部3と、それぞれ各ウェイティング処理部3により重み付けされたN個のサンプリングデータについてFFT処理を行うFFT処理部4とを備えている。
【0017】
レンジデータサンプル処理部2は、検波出力された受信信号の振幅について、FFT処理に必要なN回のサンプリング処理を行う。ウェイティング処理部3は、サンプリングデータが重み付けされずにFFT処理された際に生じる高調波成分が発生することを抑えるために、N個のサンプリング結果の振幅を調整している。
【0018】
FFT処理部4は、Nポイントのデータの収集が完了する毎にこれらの収集データのFFT処理を行う。FFT処理部4はFFT処理を行うと、Mゲートの位置に基づき距離を予測計算し、この距離をレジスタに記憶しておくようにしている。また、FFT処理部4は、FFT解析を行うことにより、このMゲートについてのドップラシフト周波数を検出してこのドップラシフト周波数をレジスタに記憶するようにしている。
【0019】
このFFT処理部4は、決められたデータ収集期間内で、1つのゲート当たりに2000ポイントあるいは4000ポイントのサンプリングを行うことによって、2000個あるいは4000個のデータを収集し、高い精度のドップラシフト周波数の分解能が確保されるようにされている。FFT処理部4によるFFT処理が実施されることにより、クラッタ及び目標信号を含む広い周波数帯域での周波数スペクトラムが算出されるようになっている。レンジデータサンプル処理部2、各ウェイティング処理部3及び各FFT処理部4にはFPGA(Field Programmable Gate Array)が用いられる。
【0020】
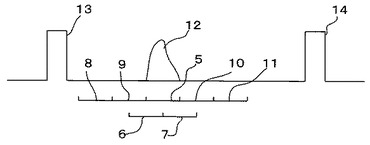
図2はレンジデータサンプル処理部2が発生させる7つ受信ゲートの位置の配置関係を示す図である。横軸は時間を表し縦軸は電圧を表す。レンジデータサンプル処理部2は、Mゲート5、Eゲート6、Lゲート7と、それぞれMゲート5が設けられる位置よりも前に設けられた2つの追加ゲート8、9と、それぞれMゲート5が設けられる位置よりも後に設けられた2つの追加ゲート10、11とを発生させている。12は目標において反射されて受信部により検波出力された信号を表す。13、14は、送信部から送信されるパルス変調信号のパルス持続時間を表す。レンジデータサンプル処理部2は、Mゲート5、Eゲート6及びLゲート7の各位置を、これらが互いに半分ずつ重なり合うようにして設定している。
【0021】
信号処理回路1では、レンジデータサンプル処理部2が、追加ゲート8、9をMゲート5の位置よりも前にそれぞれ2サイクル分及び1サイクル分ずらして発生させている。サイクルとはMゲート5のゲート持続時間を指す。レンジデータサンプル処理部2は、追加ゲート10、11を、Mゲート5の位置よりも後にそれぞれ1サイクル分及び2サイクル分ずらして発生させている。図2中、Eゲート5の両脇に、4つの追加ゲート8〜11を設けることによって、これらの追加ゲート8〜11によって不要波の進入を検出可能にしている。5サイクル分の時間幅についてのゲート設定を行うことによって、従来例よりも広い時間幅を設けて不要波が受信されたかどうかを検出できるようにしている。
【0022】
更に図1の信号処理回路1は、FFT処理部4からの出力と、予め保持する振幅レベル閾値とを比較することにより目標信号を検出する目標検出部15と、この目標信号のドップラシフト周波数の周波数位置(セル)を抽出する目標セル抽出部16と、FFT処理部4からの出力と予め保持する振幅レベル閾値とを比較することにより不要波が受信されたことを検出する不要波検出部17とを備えている。
【0023】
目標検出部15による検出処理は、Mゲート5を生成するFFT処理部4がFFT処理して得た周波数スペクトル波形中、振幅レベル閾値よりも大きい振幅を有するピークが現れる周波数をドップラシフト周波数として出力する処理である。目標信号のドップラシフト周波数の値と、クラッタのドップラシフト周波数の値とは異なるため、目標検出部15は、これらの値が違うことを利用して目標信号を検出している。
【0024】
目標セル抽出部16による抽出処理は、それぞれ所定帯域幅を有する複数のセルの中から、目標についてのドップラシフト周波数をその帯域幅の中心とする目標セルを抽出する処理である。サンプリング周期はパルス繰返し周期にされている。このパルス繰返し周期をPRI(Pulse Repetition Interval)とすると、FFT処理部4が出力する信号の周波数スペクトラムは、送信波の搬送周波数を中心とし、周波数間隔を1/PRIとする複数の線スペクトラム状の波形形状を有する。この抽出処理では、目標セル抽出部16が多数の線スペクトルの中から、目標付近の帯域の周波数ポイントを抜き出す処理を行っている。
【0025】
この目標セル抽出部16は、MEL各ゲート5〜7及び追加ゲート8〜11のそれぞれについてのセルを抽出するようにしている。目標セル抽出部16からは、時間軸上で並ぶこれらE、M、L及び追加の各ゲート5〜11について、周波数軸上でこれらのゲート5〜11に対応する各ドップラシフト周波数信号が出力されるようになっている。
【0026】
不要波検出部17による検出処理は、ゲート5〜11を生成する各FFT処理部4がFFT処理して得た周波数スペクトル信号の波形中、振幅レベル閾値よりも大きい振幅を有するピークが現れる周波数を不要波の周波数として出力する処理である。目標信号のドップラシフト周波数の値と、クラッタのドップラシフト周波数の値と、不要波のドップラシフト周波数とは互いに異なるため、不要波検出部17は、これらの値が違うことを利用して不要波を検出している。
【0027】
この不要波検出部17は、MEL各ゲート5〜7についての検出処理に用いるレベル閾値と、追加ゲート8〜11についての検出処理に用いるレベル閾値と別々に保持している。Mゲート5、Eゲート6及びLゲート7について、不要波検出部17は、第1の振幅レベル閾値と、これらのゲートで観測される信号レベルとを比較し、この信号レベルが第1の振幅レベル閾値を超えた場合、不要波が進入したことを検出する。追加ゲート8〜11について、不要波検出部17は、第2の振幅レベル閾値と、これらの追加ゲート8〜11で観測される信号レベルとを比較し、この信号レベルが第2の振幅レベル閾値を超えた場合、不要波進入を検出する。Mゲート5、Eゲート6及びLゲート7についての各第1の振幅レベル閾値は、追加ゲート8〜11についての各第2の振幅レベル閾値よりも大きい値に予め設定されている。
【0028】
更に図1の信号処理回路1は、FFT処理部4が予測した飛翔体−目標間の距離と実際の距離との距離誤差を計算する距離誤差計算部18と、受信ゲートの位置を計算しこの位置を表す信号をレンジデータサンプル処理部2に対して出力する受信ゲート位置計算部19と、不要波検出部17において不要波が受信したことが検出された場合、不要波が進入する前の最後に計算された距離情報を使って受信ゲート位置計算部19に位置を計算させるための時間の情報を出力するゲート不採用時間予測部(時間予測部)20とを備えている。
【0029】
距離誤差計算部18による距離誤差の計算処理は、FFT処理部4により得られたMゲート5を通過した受信信号の周波数信号の電圧と、Eゲート6を通過した受信信号の周波数信号の電圧と、Lゲートを通過した受信信号の周波数信号の電圧を用いて距離誤差電圧Δrを計算しこの距離誤差電圧Δrから距離誤差ΔRを計算する処理である。距離誤差計算部18は、時間領域でMゲート5から例えばEゲート6寄りに受信電力が観測される場合の距離誤差電圧Δrを、周波数領域におけるE−M/E+Mを計算することによって得ている。Lゲート7寄りに受信信号がある場合の例も同様である。この距離誤差ΔRによって、信号がMゲートに対して前後いずれの側にどれだけの量ずれているかが得られて、このずれ量の情報によりゲートが制御されるようになっている。距離誤差計算部18の機能はCPU、ROM及びRAMにより実現されている。
【0030】
受信ゲート位置計算部19は、距離誤差計算部18により計算された距離誤差を積分計算することによって受信ゲート位置を示す信号を生成する。この受信ゲート位置信号がレンジデータサンプル処理部2へ出力されることにより、Mゲート5の位置の位置決め制御が行われるようになっている。
【0031】
ゲート不採用時間予測部20がゲート不採用時間の情報を距離誤差計算部18へ出力すると、距離誤差計算部18及び受信ゲート位置計算部19の状態はいずれもゲート情報を使わない計算を行う状態にされて、距離誤差計算部18及び受信ゲート位置計算部19は、目標セル抽出部16からのゲート情報を使わないでそれぞれの計算処理を実施するようにしている。ここで、ゲートの採用とは、距離誤差計算部18が計算した距離誤差を、受信ゲートの位置の計算に使うことを意味する。ゲートの不採用とは、距離誤差計算部18が計算した距離誤差を、受信ゲートの位置の計算に使わないことを意味する。
【0032】
ゲート情報が採用されているとき、及びゲート情報が採用されていないときのいずれにおいても、レンジデータサンプル処理部2、ウェイティング処理部3及びFFT処理部4における計算処理は続けられている。ゲート情報が不採用にされている最中は、距離誤差計算部18は不要波が進入する前に計算してレジスタに格納しておいた一定値の距離誤差を出力するようにしている。目標セル抽出部16から常時出力されるゲート情報を使って距離誤差を計算するか、あるいは一定値の距離誤差を使って距離誤差を計算するかがスイッチされるようになっている。
【0033】
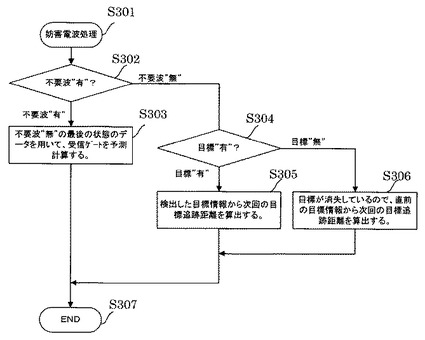
上述の構成の本実施形態に係る信号処理回路1の動作について説明する。図3は、信号処理回路1の距離誤差の計算処理を説明するためのフローチャートである。
【0034】
ステップS301において、図2における追加ゲート8から追加ゲート11用の各FFT処理部4は、予め保持する閾値と、受信信号を周波数変換して得られた周波数信号のレベルとを比較して、不要波が受信されたかどうかを判断する処理を行う。ステップS302において、不要波検出部17は、この処理の結果から、不要波の有無の判定を実施する。
【0035】
ステップS302において、不要波有りと不要波検出部17が判定した場合、不要波“有”と付されたルートを通り、この不要波検出部17は不要波が検出されたことをゲート不採用時間予測部20に対して通知する。また、距離誤差計算部18は、ゲート不採用時間予測部20から、このゲート不採用時間予測部20が予測したゲート不採用時間の情報も通知される。ゲート不採用時間予測部20を介して距離誤差計算部18がこの通知を受け取ると、ステップS303において、距離誤差計算部18は、不要波が入っていない状況で最後に計算された距離誤差のデータを、レジスタから読出し、このレジスタに格納された距離誤差を用いて、受信ゲートの位置を予測する計算を行う。距離誤差計算部18が行う計算処理では、ゲート不採用時間が始まってから、ゲート不採用時間が経過するまでの間、レジスタに格納されておいた距離誤差が使い続けられる。受信ゲート位置計算部19は、一定値の距離誤差を用いて受信ゲートの位置を計算し、受信ゲート位置信号をレンジデータサンプル処理部2に対して出力する。
【0036】
ステップS302において、不要波が無いと不要波検出部17が判定した場合、不要波“無”と付されたルートを通り、ステップS304において、目標検出部15は、Mゲート5用のFFT処理部4からのゲート情報を用いて、目標が検出されたかどうかの判定処理を実施する。
【0037】
このステップS304において、目標検出部15が目標が有ると判定した場合、目標“有”と付されたルートを通り、ステップS305において、目標セル抽出部16は、周波数領域で現れる多数のセルの中から、目標についてのセルを抽出して、抽出したセルの情報を距離誤差計算部18へ出力する。距離誤差計算部18は、出力されたセルの情報と、FFT処理部4にて演算された目標についての情報とを用いて、目標までの追跡距離を算出する。この算出した距離を距離誤差計算部18は受信ゲート位置計算部19へ出力し、この受信ゲート位置計算部19は、受信ゲートの位置を計算して、計算結果から、受信ゲート位置信号をレンジデータサンプル処理部2に対して出力する。
【0038】
ステップS304において、目標検出部15が目標が無いと判定した場合、目標“無”と付されたルートを通り、ステップS306において、距離誤差計算部18は、出力されたセルの情報と、直前までにFFT処理部4にて演算されてあった目標についての情報とを用いて、目標までの追跡距離を算出する。この算出した距離を、距離誤差計算部18はレジスタに書込む。目標を捉えられなくなった場合、目標が消失している状況下で計算を行うため、この距離は次回の目標追跡計算の際に参照される。また、受信ゲート位置計算部19は、算出された距離誤差を用いて受信ゲートの位置を計算し、受信ゲート位置信号をレンジデータサンプル処理部2に対して出力する。
【0039】
このように、本実施形態に係る信号処理回路1は、不要波検出部17からの出力に応じて、距離誤差の計算の仕方を、不要波有りの場合、不要波無し且つ目標有りの場合、及び不要波無し且つ目標無しの場合の3通りに分けて、処理の切替えを行う。
【0040】
不要波有りと判定された場合に距離誤差計算部18から出力される距離誤差は、不要波無しの状況で計算された距離誤差である。既に計算されてある以前のデータを使って距離誤差が求められている。不要波無しで且つ目標有りと判定された場合に距離誤差計算部18から出力される距離誤差は、EMLの各ゲート5〜7から出力された結果としてゲート情報を使って計算された距離誤差である。不要波無しで且つ目標が無いと判定された場合に距離誤差計算部18から出力される距離誤差は、目標が直前に見えていたときに距離誤差計算部18で得られた距離誤差でありこの距離誤差がそのまま出て行く。不要波無しで且つ目標有りであるときだけ、EMLの各ゲート5〜7からのゲート情報を用いて計算された結果が距離誤差の計算に使われる。それ以外の状況では、不要波が無かった直前の状況で計算された距離誤差や、目標が存在していた直前の情報が距離誤差計算部18から出力されるようにして出力が切り替えられている。
【0041】
図1の信号処理回路1の中で、EML各ゲート5〜7の電圧は計算されて常時距離誤差計算部18まで来ている。本実施形態に係る信号処理回路1では、不要波が検出されたときだけ、距離誤差計算部18は不要波が入る前の情報を切替え出力するため、この距離誤差計算部18から出てくる距離誤差は一定値となる。すなわち、ゲート不採用時間では、不要波が目標からの反射波に重畳する前の情報が常に出される。不要波が消失したり、あるいはゲート不採用時間が経過したならば、距離誤差計算部18は、レンジデータサンプル処理部2から各FFT処理部4までの計算によって実際に計算されたEML各ゲート5〜7のゲート情報の値から距離誤差を計算する。不要波検出部17によって不要波が消えたかどうかが判定されており、この不要波検出部17は不要波が入った場合、ゲート情報を使った計算を不採用にする時間を予測する。ゲート不採用時間が経過した時点で、ゲート情報を使った計算自体が再び有効になって、入力してきたIQ信号から距離誤差が計算されて、この距離誤差が出力される。
【0042】
反射波自体の受信信号の電圧レベルと、この反射波に不要波が重畳したときの受信信号の電圧レベルとは全く異なるため、信号処理回路1は追加ゲート8〜11での受信レベルを使って不要波を検出する。検出後、信号処理回路1は不要波が重畳する直前の距離情報を使って受信ゲートの位置を計算するように制御を行う。
【0043】
図2中4つの追加ゲート8〜11間の受信電波の強さの変動によって、不要波自体が追加ゲート8から追加ゲート11へどの程度の速さで動いているかが検知される。左端の追加ゲート8により不要波が検出されて、この追加ゲート8から右端の追加ゲート11に不要波についての電圧が移るのに例えば5サイクルかかるとする。追加ゲート8において所定のレベル閾値を超えたときからこの電圧が追加ゲート11を抜け切るまで、5サイクルかかるということを周波数領域の計算によって予測することができる。
【0044】
信号処理回路1は、不要波の受信電圧が受信ゲートを抜け切ってMゲート5を使った計算に影響がなくなる時間を見つけてやり、この時間の経過後はもう一回Mゲート5を使った計算を有効にしている。追加ゲート8〜11を、MEL各ゲート5〜7の前後に設けているため、この信号処理回路1によれば、不要波についての電圧が追加ゲート8で観測され始めて追加ゲート11から抜けていくまでの必要最小限の時間を予測でき、且つ予測処理の時間を短くすることができる。予測処理が行われている最中は、ゲート情報を使った誤差計算をオフしているかのような処理を信号処理回路1は行う。
【0045】
このように、追加ゲート8〜11からの受信電力のレベルの大きさの動きを見ることによって、ゲートを不採用にする時間の経過を予測できる。また、追加ゲート8〜11を通過する受信電力のレベルに基づき、ゲートを不採用にしている最中でも不要波が消失したことを判定でき、元のゲート情報を使った誤差計算処理に戻るようにすることができる。
【0046】
本実施形態に係る信号処理回路1では、不要波が受信されたときにゲート情報が使われないため、不要波の受信電力によって生ずるMゲート5の位置の時間軸上前後へ引っ張られることが生じない。従って、この信号処理回路1では、不要波についての電圧がMEL各ゲート5〜7間を通り過ぎるまで距離追跡処理を止めるといった処理が行われない。このため、目標を再度捉え直すような処理を行う必要がなくなる。
【0047】
従来例による信号処理回路は、不要波が受信されたことを、ドップラシフト周波数と距離誤差との相関の度合いを累積演算処理により検出していたため、不要波の受信を検出するために時間を要するが、本実施形態に係る信号処理回路1によれば、不要波の受信を短時間に検出することができる。また、この信号処理回路1によれば、不要波の受信を高い精度で検出することができるようになる。
【0048】
一般に不要波についての角度情報や距離情報は本物の目標についての角度情報や距離情報と同じである。従来例の信号処理回路では、不要波が受信された場合の距離誤差の計算の仕方と、不要波が受信されない場合の距離誤差の計算の仕方とは常に同じであるのに対し、本実施形態に係る信号処理回路1は逆に不要波がある間は不要波自体に追跡し、不要波がなくなったときには本物の反射波を再度捉えるようにしている。この信号処理回路1は、不要波自体を認識できる機能を追加ゲート8〜11により実現しているので、この不要波自体に追跡をかけることができる。この信号処理回路1ではEML各ゲート5〜7の電圧を用いたFFT計算自体は常時行われているが、不要波が無くなった場合や、ゲート不採用時間が経過した場合、距離誤差計算部18から出力される情報だけが切り替わる。距離誤差計算部18は、不要波有りと判定された場合、一回前の情報を保持しておき、常にこの情報を出し続ける。距離誤差のアウトプットがスイッチされる。
【0049】
また、不要波が検出されたときにMゲート5の位置を無効にするような処理を使うこともとり得るが、位置を無効にするような処理では、不要波が入っている時間が長い場合、目標追跡して得た位置自体がずれてしまう可能性がある。本実施形態に係る信号処理回路1によれば、ゲート情報を不採用にする時間を予測してやり、不要波が通り抜けて計算に影響がなくなる時間になるまで待ち、ゲート不採用時間が経過した場合、Mゲート5の位置をもう一回有効にする。不要波が抜けるために要する時間を予測することによって、不要波が受信系に入ってきてから、この受信系から抜けていくまでの時間を少しでも短くすることができる。予測時間を計算してこれを使うことによって、目標を再度最初から捉える計算処理をする必要がなくなる。
【0050】
不要波について検波出力された信号は、時間をかけて少しずつゲートに侵入し、反射波について検波出力された信号12(図2)と重なる。不要波の信号と反射波の信号12とが重なると、どちらの信号が目標を表す正しい信号かを信号処理回路1は分からなくなる。そのため、本実施形態に係る信号処理回路1は、新たにゲートに入ってきた信号が、反射波の信号12と重なる前に、この新たにゲートに入ってきた信号が不要波のものだと判定することを可能としている。
【0051】
図1、図2の追加ゲート8〜11により、ゲート処理のため、信号処理回路1のほうが従来例よりも電波を受信する時間が長くなる。これより、不要波が検出されてからこの不要波の信号が反射波の信号12と重なるまでの時間を長くとれる。そのため、不要波と反射波とが重なる前に、不要波がどのようなタイミングで送信されているのかを信号処理回路1は計算できる。また、不要波についての信号がゲート内に侵入した場合、不要波の信号電力に起因して反射波の検出タイミングが大きくずれるとゲート不採用時間予測部20が予想し、このゲート不採用時間予測部20はこの検出タイミングがずれると予想される時間を計算する。その間、即ちゲート不採用時間の間、距離誤差計算部18、および受信ゲート位置計算部19は予測計算結果を用いた計算によりそれぞれの値を求める。
【0052】
以上のように、本実施形態に係る信号処理回路1では、不要波を目標と誤認識せず、距離追跡を続けることができる。本実施形態に係る信号処理回路1によれば、目標から不要波が放射されても目標距離の追跡を高い精度で行うことができるようになる。また、この信号処理回路1によれば、受信ゲートによるECM対策が行えるようになる。
【0053】
尚、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。上記の実施形態では、信号処理回路は、飛翔体に搭載された距離追跡装置に設けられていたが、この信号処理回路は、地上局のパルスレーダ装置等に実装されてもよい。信号処理回路が発生させる追加ゲートの数は5個又は6個以上でもよい。
【0054】
また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。
【図面の簡単な説明】
【0055】
【図1】本発明の実施の形態に係る信号処理回路のブロック図である。
【図2】レンジデータサンプル処理部が発生させる複数の受信ゲートの位置の配置関係を示す図である。
【図3】本発明の実施の形態に係る信号処理回路の距離誤差計算処理を説明するためのフローチャートである。
【符号の説明】
【0056】
1…信号処理回路、2…レンジデータサンプル処理部(ゲート発生部)、3…ウェイティング処理部、4…FFT処理部、5…Mゲート(レンジゲート)、6…Eゲート(進みゲート)、7…Lゲート(遅れゲート)、8,9…追加ゲート(前段追加ゲート)、10,11…追加ゲート(後段追加ゲート)、12…受信信号、13,14…送信信号(パルス変調波)、15…目標検出部、16…目標セル抽出部、17…不要波検出部、18…距離誤差計算部、19…受信ゲート位置計算部、20…ゲート不採用時間予測部(時間予測部)。
【技術分野】
【0001】
本発明は信号処理回路に関し、例えばこの信号処理回路が搭載される飛翔体が目標を距離追跡し続けるための受信ゲートの位置の設け方に関するものである。
【背景技術】
【0002】
スプリットゲート方式により移動目標との相対距離を算出する装置では、信号処理回路が目標探知距離を決定するためのゲート(ゲート信号)を発生させて、時間軸上で目標からの反射波が帰って来るであろう時間にこのゲートのゲート幅の中央位置を合わせた状態でこの反射波を待受けしている。この信号処理回路は、目標距離までの往復時間に相当するレンジゲートであるM(Middle)ゲートの位置を設定し、検波出力された受信信号を、進みゲートであるE(Early)ゲートと、遅れゲートであるL(Late)ゲートとを同時に通過させて、この受信信号がMゲートの前後いずれにずれているかを計算し、これらのEゲート及びMゲートからの各出力信号の電圧を用いて距離誤差を算出するようにしている。信号処理回路は、この距離誤差とMゲートの位置とを加算することによって目標までの距離を特定している。
【0003】
飛翔体と目標との距離は、飛翔体から送信される電波が目標において反射されて、再び飛翔体に戻ってくるまでの時間に基づいて計算される。この戻ってきた電波は、飛翔体に設けられた目標追跡装置の信号処理回路が生成するゲートが持続している時間だけ受信処理される。
【0004】
信号処理回路は、Mゲート、Eゲート及びLゲートの3つのゲートが重なり合うようにこれらのゲートの位置を設定している。Mゲートの位置は、目標から戻ってきた電波の受信時間が、このMゲートが開いている時間の中心に来るように計算されて設定されている。Mゲートが開き始めた時刻をt、このMゲートが開いている時間をTとすると、Eゲートは、t−T/2からt+T/2までの間、ゲートが開くように設定されている。Lゲートは、t+T/2からt+3T/2までの間、ゲートが開くように設定されている。この3つのゲートから出力される受信信号の電圧により、これらのゲートのうちの受信電力が最も大きいゲートを特定し、どこのゲートに反射波が戻ってきたのかが計算される。これより、予測していた距離と実際の距離との距離誤差が計算される。
【0005】
距離追跡に関する技術としては、追跡レーダの距離系の追跡に使用する距離追跡装置が知られている(例えば特許文献1参照)。この特許文献1は、距離追跡装置が、検出目標が複数の場合、その検出された目標のレンジビン番号を比較し、最も小さいレンジビン番号すなわち最も近接した目標に対してゲートの中心位置を距離追跡部に指示するプロセッサを備えている点を開示している。
【0006】
近年、不要波を送信する目標が出現している。ECM(Electric Counter Measures)の手段の一つとして、目標が不要波を放射することにより、目標へ向かう飛翔体のレーダ機能を混乱させる手段が使われるようになってきている。目標からの不要波には、レーダ波が反射したタイミングとずれたタイミングで放射される電波等が含まれる。この不要波を、信号処理回路が目標で反射された電波と認識してしまうと、距離誤差の計算結果が不正確になり距離追跡ができなくなる。
【0007】
目標からの反射波と不要波とが重なって受信されたときに、時間領域においてこれらの反射波及び不要波を分離する機能を持つ信号処理回路を作成することはハードウェアの規模が大型化するため困難である。
【0008】
そこで、従来、不要波が受信されたことを周波数領域において検出する機能を持つ信号処理回路が使われている。この信号処理回路は、反射波のドップラシフト周波数を計算し、このドップラシフト周波数と、目標の距離との相関の度合いを計算する機能を有する。この相関の計算は、不要波が受信されていない間はドップラシフト周波数と目標距離との相関がとれており、不要波が受信されている間はこの相関がとれていないということを利用した計算である。相関の計算を行う回路は、ドップラシフト周波数と、目標距離あるいは距離誤差との相関の度合いを算出し、この相関の度合いが劣化した場合、相関がとれなくなったと判定し、不要波が受信されたことを検出するようにしている。
【特許文献1】特開平6−138222号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、目標からの反射波の受信信号のレベルは変動するため、距離誤差の検出精度は、ドップラシフト周波数の検出精度に比べて元々悪い。ドップラシフト周波数の検出精度を上げることは帯域に対するサンプル数を増やすことによって可能である。一方、距離誤差の検出は受信ゲートのゲート幅に基づくものであり、この受信ゲートを用いた検出では距離自体の精度の分解能を高くすることができないため、距離誤差の検出精度を上げることは難しい。
【0010】
ドップラシフト周波数と距離誤差との相関の度合いを測る手法は、一例として、ドップラシフト周波数と目標距離との差を累積的に加算していき、この累積値が予め決めておいた閾値を超えた場合、判定手段が相関の度合いが劣化したと判定するものである。ところが、この累積値がある程度大きくなるまでには時間がかかる。不要波が受信されたことを信号処理回路が判定できない場合がある。信号処理回路が不要波が受信されたことを検出した後、再度目標追跡をし直す処理を行う必要があり、その上この目標追跡をすぐに行えないことがある。この場合、信号処理回路が目標を捉えることは難しい。不要波が受信されたことを検出する手法として、相関の度合いを測る手法では、高い精度で検出を行えず、不要波の検出に時間を要することがある。
【0011】
本発明は、上記事情を考慮してなされたもので、不要波を送信する目標の距離を追跡する信号処理回路において、不要波が受信されたことを高い精度で検出できるようにし、且つ目標距離の追跡を行える信号処理回路を提供することを目的とする。
【課題を解決するための手段】
【0012】
このような課題を解決するため、本発明の一態様によれば、搬送波を所定のパルス幅のパルス信号でパルス変調しパルス変調波を送信し、目標からの反射波を含む電波を受信検波する送受信部と、この送受信部からの検波出力に基づき、このパルス幅に相当する時間の受信信号を抽出するためのレンジゲート、それぞれこのレンジゲートの前後に位置する進みゲート及び遅れゲート、それぞれがこのレンジゲートのゲート幅を有し前記レンジゲートの開始位置の前方から始まりこの開始位置で終わる複数の前段追加ゲート、及びそれぞれがこのゲート幅を有し前記レンジゲートの終了位置から始まりこの終了位置よりも後方で終わる複数の後段追加ゲートを発生させるゲート発生部と、これらのレンジゲート、進みゲート、遅れゲート、複数の前段追加ゲート及び複数の後段追加ゲートを用いて抽出された受信信号を周波数解析してゲート情報を求め、このゲート情報に基づき目標距離の距離誤差を計算し、前記ゲート情報を記憶部に記憶する距離誤差計算部と、前記複数の前段追加ゲートの信号レベル及び前記複数の後段追加ゲートの信号レベルと、予め保持する各閾値とを比較することにより、前記目標からの不要波の受信を検出する不要波検出部と、前記複数の前段追加ゲートの信号レベル及び前記複数の後段追加ゲートの信号レベルと、これらの前段追加ゲートの位置及びこれらの後段追加ゲートの位置とに基づいて、この不要波の受信の検出後、前記不要波が消失するまでの時間を予測する時間予測部と、を備え、この時間予測部が予測したこの時間の情報が前記距離誤差計算部に通知されると、この距離誤差計算部は前記不要波の受信が検出される以前に計算したゲート情報を前記記憶部から読出しこのゲート情報を用いて前記距離誤差を計算することを特徴とする信号処理回路が提供される。
【発明の効果】
【0013】
本発明によれば、例えば目標距離の追跡に用いられる信号処理回路が、この目標から不要波が放射されても、目標距離の追跡を高い精度で行うことができるようになる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施の形態に係る信号処理回路について、図1乃至図3を参照しながら説明する。尚、各図において同一箇所については同一の符号を付すとともに、重複した説明は省略する。
【0015】
本実施形態に係る信号処理回路は、飛翔体に搭載されてこの飛翔体と移動目標との距離を算出する装置に設けられている。この装置は例えば目標追跡装置であり、パルス状の送信波をパルス繰返し周期で繰返し送信するとともに、目標において反射されたこの送信波についての反射波を検波しIQ信号を出力する送受信部と、これらのIQ信号について高速サンプリング処理や移動平均処理を行い、M、E、Lの3つのゲート及び後述する4つの追加ゲートを発生させて、これらの受信ゲートで得られた信号電圧により目標との相対距離を算出する目標距離算出部とを備えている。この信号処理回路はこの目標距離算出部に用いられている。
【0016】
図1は本実施形態に係る信号処理回路のブロック図である。信号処理回路1は、図示しない受信部から検波出力された受信信号をAD変換し、AD変換出力されたデータのうちの所定個数のデータについてゲート毎の移動平均処理を行うことにより7つの受信ゲートを生成するとともに、このAD変換出力されたデータをパルス繰返し周期毎にサンプリングし、ゲート毎にN個(例えば2000個、4000個)のサンプリング結果を取得するレンジデータサンプル処理部(ゲート発生部)2と、それぞれこのN個のサンプリング結果に窓関数を掛け合わす重み付け演算を行う7つのウェイティング処理部3と、それぞれ各ウェイティング処理部3により重み付けされたN個のサンプリングデータについてFFT処理を行うFFT処理部4とを備えている。
【0017】
レンジデータサンプル処理部2は、検波出力された受信信号の振幅について、FFT処理に必要なN回のサンプリング処理を行う。ウェイティング処理部3は、サンプリングデータが重み付けされずにFFT処理された際に生じる高調波成分が発生することを抑えるために、N個のサンプリング結果の振幅を調整している。
【0018】
FFT処理部4は、Nポイントのデータの収集が完了する毎にこれらの収集データのFFT処理を行う。FFT処理部4はFFT処理を行うと、Mゲートの位置に基づき距離を予測計算し、この距離をレジスタに記憶しておくようにしている。また、FFT処理部4は、FFT解析を行うことにより、このMゲートについてのドップラシフト周波数を検出してこのドップラシフト周波数をレジスタに記憶するようにしている。
【0019】
このFFT処理部4は、決められたデータ収集期間内で、1つのゲート当たりに2000ポイントあるいは4000ポイントのサンプリングを行うことによって、2000個あるいは4000個のデータを収集し、高い精度のドップラシフト周波数の分解能が確保されるようにされている。FFT処理部4によるFFT処理が実施されることにより、クラッタ及び目標信号を含む広い周波数帯域での周波数スペクトラムが算出されるようになっている。レンジデータサンプル処理部2、各ウェイティング処理部3及び各FFT処理部4にはFPGA(Field Programmable Gate Array)が用いられる。
【0020】
図2はレンジデータサンプル処理部2が発生させる7つ受信ゲートの位置の配置関係を示す図である。横軸は時間を表し縦軸は電圧を表す。レンジデータサンプル処理部2は、Mゲート5、Eゲート6、Lゲート7と、それぞれMゲート5が設けられる位置よりも前に設けられた2つの追加ゲート8、9と、それぞれMゲート5が設けられる位置よりも後に設けられた2つの追加ゲート10、11とを発生させている。12は目標において反射されて受信部により検波出力された信号を表す。13、14は、送信部から送信されるパルス変調信号のパルス持続時間を表す。レンジデータサンプル処理部2は、Mゲート5、Eゲート6及びLゲート7の各位置を、これらが互いに半分ずつ重なり合うようにして設定している。
【0021】
信号処理回路1では、レンジデータサンプル処理部2が、追加ゲート8、9をMゲート5の位置よりも前にそれぞれ2サイクル分及び1サイクル分ずらして発生させている。サイクルとはMゲート5のゲート持続時間を指す。レンジデータサンプル処理部2は、追加ゲート10、11を、Mゲート5の位置よりも後にそれぞれ1サイクル分及び2サイクル分ずらして発生させている。図2中、Eゲート5の両脇に、4つの追加ゲート8〜11を設けることによって、これらの追加ゲート8〜11によって不要波の進入を検出可能にしている。5サイクル分の時間幅についてのゲート設定を行うことによって、従来例よりも広い時間幅を設けて不要波が受信されたかどうかを検出できるようにしている。
【0022】
更に図1の信号処理回路1は、FFT処理部4からの出力と、予め保持する振幅レベル閾値とを比較することにより目標信号を検出する目標検出部15と、この目標信号のドップラシフト周波数の周波数位置(セル)を抽出する目標セル抽出部16と、FFT処理部4からの出力と予め保持する振幅レベル閾値とを比較することにより不要波が受信されたことを検出する不要波検出部17とを備えている。
【0023】
目標検出部15による検出処理は、Mゲート5を生成するFFT処理部4がFFT処理して得た周波数スペクトル波形中、振幅レベル閾値よりも大きい振幅を有するピークが現れる周波数をドップラシフト周波数として出力する処理である。目標信号のドップラシフト周波数の値と、クラッタのドップラシフト周波数の値とは異なるため、目標検出部15は、これらの値が違うことを利用して目標信号を検出している。
【0024】
目標セル抽出部16による抽出処理は、それぞれ所定帯域幅を有する複数のセルの中から、目標についてのドップラシフト周波数をその帯域幅の中心とする目標セルを抽出する処理である。サンプリング周期はパルス繰返し周期にされている。このパルス繰返し周期をPRI(Pulse Repetition Interval)とすると、FFT処理部4が出力する信号の周波数スペクトラムは、送信波の搬送周波数を中心とし、周波数間隔を1/PRIとする複数の線スペクトラム状の波形形状を有する。この抽出処理では、目標セル抽出部16が多数の線スペクトルの中から、目標付近の帯域の周波数ポイントを抜き出す処理を行っている。
【0025】
この目標セル抽出部16は、MEL各ゲート5〜7及び追加ゲート8〜11のそれぞれについてのセルを抽出するようにしている。目標セル抽出部16からは、時間軸上で並ぶこれらE、M、L及び追加の各ゲート5〜11について、周波数軸上でこれらのゲート5〜11に対応する各ドップラシフト周波数信号が出力されるようになっている。
【0026】
不要波検出部17による検出処理は、ゲート5〜11を生成する各FFT処理部4がFFT処理して得た周波数スペクトル信号の波形中、振幅レベル閾値よりも大きい振幅を有するピークが現れる周波数を不要波の周波数として出力する処理である。目標信号のドップラシフト周波数の値と、クラッタのドップラシフト周波数の値と、不要波のドップラシフト周波数とは互いに異なるため、不要波検出部17は、これらの値が違うことを利用して不要波を検出している。
【0027】
この不要波検出部17は、MEL各ゲート5〜7についての検出処理に用いるレベル閾値と、追加ゲート8〜11についての検出処理に用いるレベル閾値と別々に保持している。Mゲート5、Eゲート6及びLゲート7について、不要波検出部17は、第1の振幅レベル閾値と、これらのゲートで観測される信号レベルとを比較し、この信号レベルが第1の振幅レベル閾値を超えた場合、不要波が進入したことを検出する。追加ゲート8〜11について、不要波検出部17は、第2の振幅レベル閾値と、これらの追加ゲート8〜11で観測される信号レベルとを比較し、この信号レベルが第2の振幅レベル閾値を超えた場合、不要波進入を検出する。Mゲート5、Eゲート6及びLゲート7についての各第1の振幅レベル閾値は、追加ゲート8〜11についての各第2の振幅レベル閾値よりも大きい値に予め設定されている。
【0028】
更に図1の信号処理回路1は、FFT処理部4が予測した飛翔体−目標間の距離と実際の距離との距離誤差を計算する距離誤差計算部18と、受信ゲートの位置を計算しこの位置を表す信号をレンジデータサンプル処理部2に対して出力する受信ゲート位置計算部19と、不要波検出部17において不要波が受信したことが検出された場合、不要波が進入する前の最後に計算された距離情報を使って受信ゲート位置計算部19に位置を計算させるための時間の情報を出力するゲート不採用時間予測部(時間予測部)20とを備えている。
【0029】
距離誤差計算部18による距離誤差の計算処理は、FFT処理部4により得られたMゲート5を通過した受信信号の周波数信号の電圧と、Eゲート6を通過した受信信号の周波数信号の電圧と、Lゲートを通過した受信信号の周波数信号の電圧を用いて距離誤差電圧Δrを計算しこの距離誤差電圧Δrから距離誤差ΔRを計算する処理である。距離誤差計算部18は、時間領域でMゲート5から例えばEゲート6寄りに受信電力が観測される場合の距離誤差電圧Δrを、周波数領域におけるE−M/E+Mを計算することによって得ている。Lゲート7寄りに受信信号がある場合の例も同様である。この距離誤差ΔRによって、信号がMゲートに対して前後いずれの側にどれだけの量ずれているかが得られて、このずれ量の情報によりゲートが制御されるようになっている。距離誤差計算部18の機能はCPU、ROM及びRAMにより実現されている。
【0030】
受信ゲート位置計算部19は、距離誤差計算部18により計算された距離誤差を積分計算することによって受信ゲート位置を示す信号を生成する。この受信ゲート位置信号がレンジデータサンプル処理部2へ出力されることにより、Mゲート5の位置の位置決め制御が行われるようになっている。
【0031】
ゲート不採用時間予測部20がゲート不採用時間の情報を距離誤差計算部18へ出力すると、距離誤差計算部18及び受信ゲート位置計算部19の状態はいずれもゲート情報を使わない計算を行う状態にされて、距離誤差計算部18及び受信ゲート位置計算部19は、目標セル抽出部16からのゲート情報を使わないでそれぞれの計算処理を実施するようにしている。ここで、ゲートの採用とは、距離誤差計算部18が計算した距離誤差を、受信ゲートの位置の計算に使うことを意味する。ゲートの不採用とは、距離誤差計算部18が計算した距離誤差を、受信ゲートの位置の計算に使わないことを意味する。
【0032】
ゲート情報が採用されているとき、及びゲート情報が採用されていないときのいずれにおいても、レンジデータサンプル処理部2、ウェイティング処理部3及びFFT処理部4における計算処理は続けられている。ゲート情報が不採用にされている最中は、距離誤差計算部18は不要波が進入する前に計算してレジスタに格納しておいた一定値の距離誤差を出力するようにしている。目標セル抽出部16から常時出力されるゲート情報を使って距離誤差を計算するか、あるいは一定値の距離誤差を使って距離誤差を計算するかがスイッチされるようになっている。
【0033】
上述の構成の本実施形態に係る信号処理回路1の動作について説明する。図3は、信号処理回路1の距離誤差の計算処理を説明するためのフローチャートである。
【0034】
ステップS301において、図2における追加ゲート8から追加ゲート11用の各FFT処理部4は、予め保持する閾値と、受信信号を周波数変換して得られた周波数信号のレベルとを比較して、不要波が受信されたかどうかを判断する処理を行う。ステップS302において、不要波検出部17は、この処理の結果から、不要波の有無の判定を実施する。
【0035】
ステップS302において、不要波有りと不要波検出部17が判定した場合、不要波“有”と付されたルートを通り、この不要波検出部17は不要波が検出されたことをゲート不採用時間予測部20に対して通知する。また、距離誤差計算部18は、ゲート不採用時間予測部20から、このゲート不採用時間予測部20が予測したゲート不採用時間の情報も通知される。ゲート不採用時間予測部20を介して距離誤差計算部18がこの通知を受け取ると、ステップS303において、距離誤差計算部18は、不要波が入っていない状況で最後に計算された距離誤差のデータを、レジスタから読出し、このレジスタに格納された距離誤差を用いて、受信ゲートの位置を予測する計算を行う。距離誤差計算部18が行う計算処理では、ゲート不採用時間が始まってから、ゲート不採用時間が経過するまでの間、レジスタに格納されておいた距離誤差が使い続けられる。受信ゲート位置計算部19は、一定値の距離誤差を用いて受信ゲートの位置を計算し、受信ゲート位置信号をレンジデータサンプル処理部2に対して出力する。
【0036】
ステップS302において、不要波が無いと不要波検出部17が判定した場合、不要波“無”と付されたルートを通り、ステップS304において、目標検出部15は、Mゲート5用のFFT処理部4からのゲート情報を用いて、目標が検出されたかどうかの判定処理を実施する。
【0037】
このステップS304において、目標検出部15が目標が有ると判定した場合、目標“有”と付されたルートを通り、ステップS305において、目標セル抽出部16は、周波数領域で現れる多数のセルの中から、目標についてのセルを抽出して、抽出したセルの情報を距離誤差計算部18へ出力する。距離誤差計算部18は、出力されたセルの情報と、FFT処理部4にて演算された目標についての情報とを用いて、目標までの追跡距離を算出する。この算出した距離を距離誤差計算部18は受信ゲート位置計算部19へ出力し、この受信ゲート位置計算部19は、受信ゲートの位置を計算して、計算結果から、受信ゲート位置信号をレンジデータサンプル処理部2に対して出力する。
【0038】
ステップS304において、目標検出部15が目標が無いと判定した場合、目標“無”と付されたルートを通り、ステップS306において、距離誤差計算部18は、出力されたセルの情報と、直前までにFFT処理部4にて演算されてあった目標についての情報とを用いて、目標までの追跡距離を算出する。この算出した距離を、距離誤差計算部18はレジスタに書込む。目標を捉えられなくなった場合、目標が消失している状況下で計算を行うため、この距離は次回の目標追跡計算の際に参照される。また、受信ゲート位置計算部19は、算出された距離誤差を用いて受信ゲートの位置を計算し、受信ゲート位置信号をレンジデータサンプル処理部2に対して出力する。
【0039】
このように、本実施形態に係る信号処理回路1は、不要波検出部17からの出力に応じて、距離誤差の計算の仕方を、不要波有りの場合、不要波無し且つ目標有りの場合、及び不要波無し且つ目標無しの場合の3通りに分けて、処理の切替えを行う。
【0040】
不要波有りと判定された場合に距離誤差計算部18から出力される距離誤差は、不要波無しの状況で計算された距離誤差である。既に計算されてある以前のデータを使って距離誤差が求められている。不要波無しで且つ目標有りと判定された場合に距離誤差計算部18から出力される距離誤差は、EMLの各ゲート5〜7から出力された結果としてゲート情報を使って計算された距離誤差である。不要波無しで且つ目標が無いと判定された場合に距離誤差計算部18から出力される距離誤差は、目標が直前に見えていたときに距離誤差計算部18で得られた距離誤差でありこの距離誤差がそのまま出て行く。不要波無しで且つ目標有りであるときだけ、EMLの各ゲート5〜7からのゲート情報を用いて計算された結果が距離誤差の計算に使われる。それ以外の状況では、不要波が無かった直前の状況で計算された距離誤差や、目標が存在していた直前の情報が距離誤差計算部18から出力されるようにして出力が切り替えられている。
【0041】
図1の信号処理回路1の中で、EML各ゲート5〜7の電圧は計算されて常時距離誤差計算部18まで来ている。本実施形態に係る信号処理回路1では、不要波が検出されたときだけ、距離誤差計算部18は不要波が入る前の情報を切替え出力するため、この距離誤差計算部18から出てくる距離誤差は一定値となる。すなわち、ゲート不採用時間では、不要波が目標からの反射波に重畳する前の情報が常に出される。不要波が消失したり、あるいはゲート不採用時間が経過したならば、距離誤差計算部18は、レンジデータサンプル処理部2から各FFT処理部4までの計算によって実際に計算されたEML各ゲート5〜7のゲート情報の値から距離誤差を計算する。不要波検出部17によって不要波が消えたかどうかが判定されており、この不要波検出部17は不要波が入った場合、ゲート情報を使った計算を不採用にする時間を予測する。ゲート不採用時間が経過した時点で、ゲート情報を使った計算自体が再び有効になって、入力してきたIQ信号から距離誤差が計算されて、この距離誤差が出力される。
【0042】
反射波自体の受信信号の電圧レベルと、この反射波に不要波が重畳したときの受信信号の電圧レベルとは全く異なるため、信号処理回路1は追加ゲート8〜11での受信レベルを使って不要波を検出する。検出後、信号処理回路1は不要波が重畳する直前の距離情報を使って受信ゲートの位置を計算するように制御を行う。
【0043】
図2中4つの追加ゲート8〜11間の受信電波の強さの変動によって、不要波自体が追加ゲート8から追加ゲート11へどの程度の速さで動いているかが検知される。左端の追加ゲート8により不要波が検出されて、この追加ゲート8から右端の追加ゲート11に不要波についての電圧が移るのに例えば5サイクルかかるとする。追加ゲート8において所定のレベル閾値を超えたときからこの電圧が追加ゲート11を抜け切るまで、5サイクルかかるということを周波数領域の計算によって予測することができる。
【0044】
信号処理回路1は、不要波の受信電圧が受信ゲートを抜け切ってMゲート5を使った計算に影響がなくなる時間を見つけてやり、この時間の経過後はもう一回Mゲート5を使った計算を有効にしている。追加ゲート8〜11を、MEL各ゲート5〜7の前後に設けているため、この信号処理回路1によれば、不要波についての電圧が追加ゲート8で観測され始めて追加ゲート11から抜けていくまでの必要最小限の時間を予測でき、且つ予測処理の時間を短くすることができる。予測処理が行われている最中は、ゲート情報を使った誤差計算をオフしているかのような処理を信号処理回路1は行う。
【0045】
このように、追加ゲート8〜11からの受信電力のレベルの大きさの動きを見ることによって、ゲートを不採用にする時間の経過を予測できる。また、追加ゲート8〜11を通過する受信電力のレベルに基づき、ゲートを不採用にしている最中でも不要波が消失したことを判定でき、元のゲート情報を使った誤差計算処理に戻るようにすることができる。
【0046】
本実施形態に係る信号処理回路1では、不要波が受信されたときにゲート情報が使われないため、不要波の受信電力によって生ずるMゲート5の位置の時間軸上前後へ引っ張られることが生じない。従って、この信号処理回路1では、不要波についての電圧がMEL各ゲート5〜7間を通り過ぎるまで距離追跡処理を止めるといった処理が行われない。このため、目標を再度捉え直すような処理を行う必要がなくなる。
【0047】
従来例による信号処理回路は、不要波が受信されたことを、ドップラシフト周波数と距離誤差との相関の度合いを累積演算処理により検出していたため、不要波の受信を検出するために時間を要するが、本実施形態に係る信号処理回路1によれば、不要波の受信を短時間に検出することができる。また、この信号処理回路1によれば、不要波の受信を高い精度で検出することができるようになる。
【0048】
一般に不要波についての角度情報や距離情報は本物の目標についての角度情報や距離情報と同じである。従来例の信号処理回路では、不要波が受信された場合の距離誤差の計算の仕方と、不要波が受信されない場合の距離誤差の計算の仕方とは常に同じであるのに対し、本実施形態に係る信号処理回路1は逆に不要波がある間は不要波自体に追跡し、不要波がなくなったときには本物の反射波を再度捉えるようにしている。この信号処理回路1は、不要波自体を認識できる機能を追加ゲート8〜11により実現しているので、この不要波自体に追跡をかけることができる。この信号処理回路1ではEML各ゲート5〜7の電圧を用いたFFT計算自体は常時行われているが、不要波が無くなった場合や、ゲート不採用時間が経過した場合、距離誤差計算部18から出力される情報だけが切り替わる。距離誤差計算部18は、不要波有りと判定された場合、一回前の情報を保持しておき、常にこの情報を出し続ける。距離誤差のアウトプットがスイッチされる。
【0049】
また、不要波が検出されたときにMゲート5の位置を無効にするような処理を使うこともとり得るが、位置を無効にするような処理では、不要波が入っている時間が長い場合、目標追跡して得た位置自体がずれてしまう可能性がある。本実施形態に係る信号処理回路1によれば、ゲート情報を不採用にする時間を予測してやり、不要波が通り抜けて計算に影響がなくなる時間になるまで待ち、ゲート不採用時間が経過した場合、Mゲート5の位置をもう一回有効にする。不要波が抜けるために要する時間を予測することによって、不要波が受信系に入ってきてから、この受信系から抜けていくまでの時間を少しでも短くすることができる。予測時間を計算してこれを使うことによって、目標を再度最初から捉える計算処理をする必要がなくなる。
【0050】
不要波について検波出力された信号は、時間をかけて少しずつゲートに侵入し、反射波について検波出力された信号12(図2)と重なる。不要波の信号と反射波の信号12とが重なると、どちらの信号が目標を表す正しい信号かを信号処理回路1は分からなくなる。そのため、本実施形態に係る信号処理回路1は、新たにゲートに入ってきた信号が、反射波の信号12と重なる前に、この新たにゲートに入ってきた信号が不要波のものだと判定することを可能としている。
【0051】
図1、図2の追加ゲート8〜11により、ゲート処理のため、信号処理回路1のほうが従来例よりも電波を受信する時間が長くなる。これより、不要波が検出されてからこの不要波の信号が反射波の信号12と重なるまでの時間を長くとれる。そのため、不要波と反射波とが重なる前に、不要波がどのようなタイミングで送信されているのかを信号処理回路1は計算できる。また、不要波についての信号がゲート内に侵入した場合、不要波の信号電力に起因して反射波の検出タイミングが大きくずれるとゲート不採用時間予測部20が予想し、このゲート不採用時間予測部20はこの検出タイミングがずれると予想される時間を計算する。その間、即ちゲート不採用時間の間、距離誤差計算部18、および受信ゲート位置計算部19は予測計算結果を用いた計算によりそれぞれの値を求める。
【0052】
以上のように、本実施形態に係る信号処理回路1では、不要波を目標と誤認識せず、距離追跡を続けることができる。本実施形態に係る信号処理回路1によれば、目標から不要波が放射されても目標距離の追跡を高い精度で行うことができるようになる。また、この信号処理回路1によれば、受信ゲートによるECM対策が行えるようになる。
【0053】
尚、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。上記の実施形態では、信号処理回路は、飛翔体に搭載された距離追跡装置に設けられていたが、この信号処理回路は、地上局のパルスレーダ装置等に実装されてもよい。信号処理回路が発生させる追加ゲートの数は5個又は6個以上でもよい。
【0054】
また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。
【図面の簡単な説明】
【0055】
【図1】本発明の実施の形態に係る信号処理回路のブロック図である。
【図2】レンジデータサンプル処理部が発生させる複数の受信ゲートの位置の配置関係を示す図である。
【図3】本発明の実施の形態に係る信号処理回路の距離誤差計算処理を説明するためのフローチャートである。
【符号の説明】
【0056】
1…信号処理回路、2…レンジデータサンプル処理部(ゲート発生部)、3…ウェイティング処理部、4…FFT処理部、5…Mゲート(レンジゲート)、6…Eゲート(進みゲート)、7…Lゲート(遅れゲート)、8,9…追加ゲート(前段追加ゲート)、10,11…追加ゲート(後段追加ゲート)、12…受信信号、13,14…送信信号(パルス変調波)、15…目標検出部、16…目標セル抽出部、17…不要波検出部、18…距離誤差計算部、19…受信ゲート位置計算部、20…ゲート不採用時間予測部(時間予測部)。
【特許請求の範囲】
【請求項1】
搬送波を所定のパルス幅のパルス信号でパルス変調しパルス変調波を送信し、目標からの反射波を含む電波を受信検波する送受信部と、
この送受信部からの検波出力に基づき、このパルス幅に相当する時間の受信信号を抽出するためのレンジゲート、それぞれこのレンジゲートの前後に位置する進みゲート及び遅れゲート、それぞれがこのレンジゲートのゲート幅を有し前記レンジゲートの開始位置の前方から始まりこの開始位置で終わる複数の前段追加ゲート、及びそれぞれがこのゲート幅を有し前記レンジゲートの終了位置から始まりこの終了位置よりも後方で終わる複数の後段追加ゲートを発生させるゲート発生部と、
これらのレンジゲート、進みゲート、遅れゲート、複数の前段追加ゲート及び複数の後段追加ゲートを用いて抽出された受信信号を周波数解析してゲート情報を求め、このゲート情報に基づき目標距離の距離誤差を計算し、前記ゲート情報を記憶部に記憶する距離誤差計算部と、
前記複数の前段追加ゲートの信号レベル及び前記複数の後段追加ゲートの信号レベルと、予め保持する各閾値とを比較することにより、前記目標からの不要波の受信を検出する不要波検出部と、
前記複数の前段追加ゲートの信号レベル及び前記複数の後段追加ゲートの信号レベルと、これらの前段追加ゲートの位置及びこれらの後段追加ゲートの位置とに基づいて、この不要波の受信の検出後、前記不要波が消失するまでの時間を予測する時間予測部と、を備え、
この時間予測部が予測したこの時間の情報が前記距離誤差計算部に通知されると、この距離誤差計算部は前記不要波の受信が検出される以前に計算したゲート情報を前記記憶部から読出しこのゲート情報を用いて前記距離誤差を計算することを特徴とする信号処理回路。
【請求項2】
前記不要波検出部は、前記複数の前段追加ゲート及び前記複数の後段追加ゲートのうちの最も大きい信号レベルを有する前段追加ゲート又は後段追加ゲートを、前記不要波を検出した検出追加ゲートとして認識し、
前記時間予測部は、この検出追加ゲートの検出後、前記不要波についての信号レベルが変動し、この信号レベルが最も外側に設けられた前段追加ゲート又は後段追加ゲートから外へ抜け切るまでの時間を計算しこの時間を予測時間として前記距離誤差計算部へ通知することを特徴とする請求項1記載の信号処理回路。
【請求項1】
搬送波を所定のパルス幅のパルス信号でパルス変調しパルス変調波を送信し、目標からの反射波を含む電波を受信検波する送受信部と、
この送受信部からの検波出力に基づき、このパルス幅に相当する時間の受信信号を抽出するためのレンジゲート、それぞれこのレンジゲートの前後に位置する進みゲート及び遅れゲート、それぞれがこのレンジゲートのゲート幅を有し前記レンジゲートの開始位置の前方から始まりこの開始位置で終わる複数の前段追加ゲート、及びそれぞれがこのゲート幅を有し前記レンジゲートの終了位置から始まりこの終了位置よりも後方で終わる複数の後段追加ゲートを発生させるゲート発生部と、
これらのレンジゲート、進みゲート、遅れゲート、複数の前段追加ゲート及び複数の後段追加ゲートを用いて抽出された受信信号を周波数解析してゲート情報を求め、このゲート情報に基づき目標距離の距離誤差を計算し、前記ゲート情報を記憶部に記憶する距離誤差計算部と、
前記複数の前段追加ゲートの信号レベル及び前記複数の後段追加ゲートの信号レベルと、予め保持する各閾値とを比較することにより、前記目標からの不要波の受信を検出する不要波検出部と、
前記複数の前段追加ゲートの信号レベル及び前記複数の後段追加ゲートの信号レベルと、これらの前段追加ゲートの位置及びこれらの後段追加ゲートの位置とに基づいて、この不要波の受信の検出後、前記不要波が消失するまでの時間を予測する時間予測部と、を備え、
この時間予測部が予測したこの時間の情報が前記距離誤差計算部に通知されると、この距離誤差計算部は前記不要波の受信が検出される以前に計算したゲート情報を前記記憶部から読出しこのゲート情報を用いて前記距離誤差を計算することを特徴とする信号処理回路。
【請求項2】
前記不要波検出部は、前記複数の前段追加ゲート及び前記複数の後段追加ゲートのうちの最も大きい信号レベルを有する前段追加ゲート又は後段追加ゲートを、前記不要波を検出した検出追加ゲートとして認識し、
前記時間予測部は、この検出追加ゲートの検出後、前記不要波についての信号レベルが変動し、この信号レベルが最も外側に設けられた前段追加ゲート又は後段追加ゲートから外へ抜け切るまでの時間を計算しこの時間を予測時間として前記距離誤差計算部へ通知することを特徴とする請求項1記載の信号処理回路。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2010−19623(P2010−19623A)
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2008−179074(P2008−179074)
【出願日】平成20年7月9日(2008.7.9)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成20年7月9日(2008.7.9)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]