
信号処理方法、信号処理装置、及び振動型密度計
【課題】被測定流体の温度変化、気泡混入、気体から液体への急速な変化があっても、常に一定の精度で計測でき、位相及び密度計測を少ない演算量で行える信号処理装置を提供する。
【解決手段】測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置により加振させ、前記フローチューブを交番駆動して、振動検出センサである速度センサ若しくは加速度センサによってフローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出して、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,可変調な周波数信号を発信出力する発信器90と,速度センサ若しくは加速度センサによって検出される入力周波数と、発信器90の出力周波数FXを加算(又は減算)して周波数変換し、該周波数変換後の周波数値が常に一定になるように周波数シフトする周波数変換部85とによって構成する。
【解決手段】測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置により加振させ、前記フローチューブを交番駆動して、振動検出センサである速度センサ若しくは加速度センサによってフローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出して、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,可変調な周波数信号を発信出力する発信器90と,速度センサ若しくは加速度センサによって検出される入力周波数と、発信器90の出力周波数FXを加算(又は減算)して周波数変換し、該周波数変換後の周波数値が常に一定になるように周波数シフトする周波数変換部85とによって構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、流管に作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより被計測流体の質量流量及び/又は密度を得るコリオリ流量計に関する。
【背景技術】
【0002】
未知の流体の密度を測定するために、コリオリ流量計を用いることが知られている。
コリオリ流量計は、被測定流体の流通する流管の両端を支持し、その支持点回りに流管の流れ方向と垂直な方向に振動を加えたときに、流管(以下、振動が加えられるべき流管をフローチューブという)に作用するコリオリの力が質量流量に比例することを利用して質量流量を測定するものである。
一方、振動式密度計は、流体が流れる流管(以下、振動が加えられるべき流管をフローチューブという)の共振周波数が密度の変化によって変化することを利用して、被測定流体の密度を測定するものである。
このような振動式密度計は、その主要構成が、コリオリ流量計と共通しているために、被測定流体の質量流量を測定するためのコリオリ流量計を用いて構成して、質量流量と同時に密度を計測することが従来より行われている。
したがって、フローチューブが共振振動する周期或いは周波数を測定すること
によって、流体の密度を計測することが可能となる。このフローチューブの形状は直管式と湾曲管式とに大別されている。
【0003】
湾曲管式のフローチューブを用いる場合は、被測定流体が流れるフローチューブを両端で支持し、支持されたフローチューブの中央部を支持線に対し、直角な方向に交番駆動したとき、フローチューブの両端支持部と中央部との間の対称位置に質量流量を測定するものである。
フローチューブの交番駆動の周波数をフローチューブの固有の振動数と等しくすると、被測定流体の密度に応じた一定の駆動周波数が得られ、小さい駆動エネルギで駆動することが可能となる。そこで、フローチューブを固有振動数で駆動するのが一般的となっている。
【0004】
このような湾曲管式のフローチューブを用いて密度の測定を行う場合、フローチューブを駆動するための駆動手段としては、コイルとマグネットの組み合わせで用いられることが一般的になっている。そのコイルとマグネットの取り付けに関しては、フローチューブの振動方向に対してオフセットしてない位置に取り付けることが、コイルとマグネットの位置関係のズレを最小にする上で好ましい。そこで、並列二本のフローチューブを備える湾曲管式のコリオリ流量計のような並列二本のフローチューブにあっては、コイルとマグネットとを挟み込む状態に取り付けられている。そのため、相対する二本のフローチューブの距離が少なくともコイルとマグネットとを挟み込む分だけ離れるような設計がなされている。
【0005】
二本のフローチューブがそれぞれ平行する面内に存在するコリオリ流量計であって、口径が大きいフローチューブを用いたり、剛性が高いフローチューブを用いた場合には、駆動手段のパワーを高める必要があることから、大きな駆動手段を二本のフローチューブの間に挟み込まなければならない。そのため、フローチューブの根元である固定端部においても、そのフローチューブ同士の距離が必然的に広くなるように設計されている。
【0006】
一般的に知られているU字管の測定チューブを備えるコリオリ流量計1は、図13に示す如く、2本のU字管状の測定チューブ2,3の検出器4と、変換器5とを有して構成されている。
測定チューブ2,3の検出器4には、測定チューブ2,3を共振振動させる加振器6と、該加振器6によって振動したときに測定チューブ2,3の左側に生じる振動速度を検出する左速度センサ7と、該加振器6によって振動したときに測定チューブ2,3の右側に生じる振動速度を検出する右速度センサ8と、振動速度検出時の測定チューブ2,3内を流れる被測定流体の温度を検出する温度センサ9とを備えている。これら加振器6と、左速度センサ7と、右速度センサ8と、温度センサ9は、それぞれ変換器5に接続されている。
【0007】
このコリオリ流量計1の測定チューブ2,3内に流れる被測定流体は、測定チューブ2,3の右側(右速度センサ8が設置されている側)から左側(左速度センサ7が設置されている側)に流れるようになっている。
したがって、右速度センサ8によって検出される速度信号は、測定チューブ2,3に流入する被測定流体の入口側速度信号となる。また、左速度センサ7によって検出される速度信号は、測定チューブ2,3から流出する被測定流体の出口側速度信号となる。
【0008】
この変換器5は、駆動制御部10と、位相計測部11と、温度計測部12とによって構成されている。
変換器5は、図14に示す如きブロック構成を有している。
すなわち、変換器5は、入出力ポート15を有している。この入出力ポート15には、駆動制御部10を構成する駆動信号出力端子16が設けられている。駆動制御部10は、測定チューブ2,3に取り付けられた加振器6に、所定のモードの信号を駆動信号出力端子16から出力し、測定チューブ2,3が共振振動させている。
なお、振動速度を検出する左速度センサ7、右速度センサ8は、各々加速度センサであっても、もちろんよい。
【0009】
この駆動信号出力端子16には、増幅器17を介して、駆動回路18が接続されている。この駆動回路18においては、測定チューブ2,3を共振振動させる駆動信号を生成し、該駆動信号を増幅器17に出力する。この増幅器においては、入力した駆動信号を増幅して、駆動信号出力端子16に出力する。この駆動信号出力端子16においては、増幅器17から出力されてくる駆動信号を加振器6に出力する。
【0010】
また、入出力ポート15には、加振器6によって振動したときに測定チューブ2,3の左側に生じる振動速度の検出信号を入力する左速度信号入力端子19が設けられており、この左速度信号入力端子19は、位相計測部11を構成している。
また、入出力ポート15には、加振器6によって振動したときに測定チューブ2,3の右側に生じる振動速度の検出信号を入力する右速度信号入力端子20が設けられており、この右速度信号入力端子20は、位相計測部11を構成している。
【0011】
位相計測部11は、測定チューブ2,3に取り付けられた加振器6に、所定のモードの信号を駆動信号出力端子16から出力して、加振器6によって測定チューブ2,3を振動したときの一対の速度センサの振動信号をA/D変換しデジタル変換処理をした後、変換された信号の位相差を求めている。
左速度信号入力端子19には、増幅器21の入力端子が接続されており、この増幅器21の出力端子には、A/D変換器22が接続されている。このA/D変換器22においては、左速度信号入力端子19から出力される振動信号を増幅器21で増幅したアナログ信号をデジタル値に変換している。
A/D変換器22には、演算器23が接続されている。
【0012】
また、右速度信号入力端子20には、増幅器24の入力端子が接続されており、この増幅器24の出力端子には、A/D変換器25が接続されている。このA/D変換器25においては、右速度信号入力端子20から出力される振動信号を増幅器24で増幅したアナログ信号をデジタル値に変換している。
そして、A/D変換器25の出力されるデジタル信号は、演算器23に入力される。
【0013】
さらに、入出力ポート15には、温度センサ9からの検出値を入力する温度計測部11を構成する温度信号入力端子26が設けられている。温度計測部11は、測定チューブ2,3内に設けられ測定チューブ2,3内の温度を検出する温度センサ9による検出温度によってチューブ温度の補償を行っている。
この温度センサ9には、一般に抵抗型温度センサが用いられており、抵抗値を計測することによって温度を算出している。
温度信号入力端子26には、温度計測回路27が接続されており、この温度計測回路27によって温度センサ9から出力される抵抗値に基づいて測定チューブ2,3内の温度を算出している。この温度計測回路27において算出した測定チューブ2,3内の温度は、演算器23に入力されるようになっている。
【0014】
このようなコリオリ流量計1による位相計測方法は、測定チューブ2,3に取り付けられた加振器6から、測定チューブ2,3に1次モードで振動が与えられ、この振動が与えられた状態で、測定チューブ2,3内に被測定流体が流れると、測定チューブ2,3に位相モードが生成される。
したがって、コリオリ流量計1の右速度センサ8からの信号(入口側速度信号)と左速度センサ7からの信号(出口側速度信号)は、この2つの信号が重畳された形で出力される。この2つの信号が重畳された形で出力される信号は、流量信号だけでなく不要なノイズ成分を多く含んでおり、さらに計測流体の密度変化などによっても振動数が変化してしまう。
【0015】
そのために、左速度センサ7と右速度センサ8からの信号の内、不要な信号を取り除く必要がある。しかしながら、左速度センサ7と右速度センサ8からの信号の内、不要な信号を取り除き、位相を計算することは非常に難しい。
さらに、コリオリ流量計1は、非常に高精度な計測と高速な応答性を要求されることがしばしばある。この要求を満足するためには、非常に複雑な演算と高い処理能力をもった演算器を必要とし、コリオリ流量計そのものが非常に高価なものになっている。
このようなことから、コリオリ流量計には、常に計測周波数に合わせた最適なフィルタと高速な演算方法を併せ持った位相差計測方法とフローチューブの共振周波数計測の確立が必要とされている。
【0016】
従来の流量を計算するための位相差計測方法において、ノイズを除去するためのフィルタ処理方法としては、アナログフィルタを用いた方法と、デジタルフィルタを用いた方法とがある。
アナログフィルタを用いた方法は、比較的安価に構成できる(例えば、特許文献1、特許文献2参照)。しかし、この特許文献1、特許文献2においてフィルタの能力を上げることには限界があり、コリオリ流量計のフィルタとしては、十分ではないという問題点がある。
【0017】
近年、デジタル信号処理を用いたコリオリ流量計が数多く開発されており、
従来の流量を計算するための位相差計測方法において、ノイズを除去するためのフィルタ処理方法としてデジタルフィルタを用いた方法が開発されている。
デジタル信号処理を用いたコリオリ流量計のタイプとしては、従来、フーリエ変換を用いて位相を計測する方法(例えば、特許文献3参照)、ノッチフィルタ、バンドパスフィルタなどのフィルタテーブルを持つことによって、入力周波数に併せた最適なテーブルを選択し、位相を計測する方法(例えば、特許文献4、特許文献5参照)などがある。
【0018】
《フーリエ変換を用いた位相計測方法》
フーリエ変換を用いた位相計測方法による変換器は、図15に示す如きブロック構成を用いて行われる。
図15において、左速度センサ7によって検出される加振器6によって振動したときに測定チューブ2,3の左側に生じる振動速度の検出信号(出口側速度信号)を入力する入出力ポート15に設けられている左速度信号入力端子19には、ローパスフィルタ30が接続されている。このローパスフィルタ30は、加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3の左側に生じる振動速度を検出する左速度センサ7から出力される左速度信号(出口側速度信号)を周波数フィルタを通して、低い周波数の左速度信号(出口側速度信号)のみを取り出す回路である。
【0019】
このローパスフィルタ30には、A/Dコンバータ31が接続されている。このA/Dコンバータ31は、ローパスフィルタ30から出力されてくるアナログ信号である左速度信号をデジタル信号に変換するものである。このA/Dコンバータ31においてデジタル信号に変換された左速度信号は、位相差計測器32に入力される。
また、このA/Dコンバータ31には、タイミング発生器33が接続されている。このタイミング発生器33は、入力周波数のM倍(Mは自然数)のサンプリングのタイミングを生成するものである。
【0020】
一方、右速度センサ8によって検出される加振器6によって振動したときに測定チューブ2,3の右側に生じる振動速度の検出信号(入口側速度信号)を入力する入出力ポート15に設けられている右速度信号入力端子20には、ローパスフィルタ34が接続されている。このローパスフィルタ34は、加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3の右側に生じる振動速度を検出する右速度センサ8から出力される右速度信号(入口側速度信号)を周波数フィルタを通して、低い周波数の右速度信号(入口側速度信号)のみを取り出す回路である。
【0021】
このローパスフィルタ34には、A/Dコンバータ35が接続されている。このA/Dコンバータ35は、ローパスフィルタ34から出力されてくるアナログ信号である右速度信号をデジタル信号に変換するものである。このA/Dコンバータ35においてデジタル信号に変換された右速度信号は、位相差計測器32に入力される。
また、このA/Dコンバータ35には、タイミング発生器33が接続されている。このタイミング発生器33は、入力周波数のM倍(Mは自然数)のサンプリングのタイミングを生成するものである。
【0022】
また、右速度センサ8によって検出される加振器6によって振動したときに測定チューブ2,3の右側に生じる振動速度の検出信号(入口側速度信号)を入力する入出力ポート15に設けられている右速度信号入力端子20には、周波数計測器36が接続されている。この周波数計測器36は、右速度センサ8によって検出される加振器6によって振動したときに測定チューブ2,3の右側に生じる振動速度の検出信号(入口側速度信号)の周波数を計測するものである。
この周波数計測器36には、タイミング発生器33が接続されている。この周波数計測器36において計測された周波数は、タイミング発生器33に出力され、タイミング発生器33において入力周波数のM倍(Mは自然数)のサンプリングのタイミングが生成され、A/Dコンバータ31,35に出力される。
この位相差計測器32と、タイミング発生器33と、周波数計測器36とによって位相計測演算器40が構成されている。
【0023】
図15に示すように構成されるフーリエ変換を用いた位相計測方法においては、右速度センサ8からの入力信号(入口側速度信号)が、まず、周波数計測器36に入力され周波数が計測される。この周波数計測器36において計測された周波数は、タイミング発生器33に入力され、このタイミング発生器33においては、入力周波数のM倍(Mは自然数)のサンプリングのタイミングが生成され、A/Dコンバータ31,35に入力される。
また、A/Dコンバータ31においてデジタル信号に変換された測定チューブ2,3の左側に生じる振動速度の検出信号(出口側速度信号)と、A/Dコンバータ35においてデジタル信号に変換された測定チューブ2,3の右側に生じる振動速度の検出信号(入口側速度信号)は、位相差計測器32に入力される。そして、この位相差計測器32において、内蔵されるディスクリートフーリエ変換器でフーリエ変換され、その変換された信号の実数成分と虚数成分との比から位相差が演算される。
【0024】
《デジタルフィルタを用いた位相計測方法》
デジタルフィルタを用いた位相計測方法における変換器について、図16,図17に示されるブロック構成図を用いて説明する。
デジタルフィルタには、ノッチフィルタやバンドパスフィルタなどの周波数選択手段があり、このノッチフィルタやバンドパスフィルタなどの周波数選択手段を用い入力信号のS/N比を向上させるものである。
図16には、デジタルフィルタとしてノッチフィルタを用いた変換器のブロック構成が示されている。
図16に図示の入出力ポート15、左速度信号入力端子19、右速度信号入力端子20、ローパスフィルタ30,34、A/Dコンバータ31,35は、図15に図示の入出力ポート15、左速度信号入力端子19、右速度信号入力端子20、ローパスフィルタ30,34、A/Dコンバータ31,35と同一の構成を有するものである。
【0025】
図16において、A/Dコンバータ31には、ノッチフィルタ51が接続されている。このノッチフィルタ51は、A/Dコンバータ31においてデジタル信号に変換された左速度信号を基に周波数を選択し、入力信号のS/N比を向上して出力するものである。
このノッチフィルタ51には、位相計測器52が接続されており、この位相計測器52は、ノッチフィルタ51によってS/N比を向上させた後のデジタル信号に変換された左速度信号の位相を計測するものである。
また、ノッチフィルタ51には、周波数計測器53が接続されている。この周波数計測器53は、ノッチフィルタ51によってS/N比を向上させた後のデジタル信号に変換された左速度信号の周波数を計測するものである。
そして、この周波数計測器53において計測された周波数は、ノッチフィルタ51に入力される。
【0026】
また、A/Dコンバータ35には、ノッチフィルタ54が接続されている。このノッチフィルタ54は、A/Dコンバータ31においてデジタル信号に変換された左速度信号を基に周波数を選択し、入力信号のS/N比を向上して出力するものである。
このノッチフィルタ54には、位相計測器52が接続されており、この位相計測器52は、ノッチフィルタ54によってS/N比を向上させた後のデジタル信号に変換された右速度信号の位相を計測するものである。
また、ノッチフィルタ54には、周波数計測器53において計測された周波数が、入力されるようになっている。
【0027】
図16において、クロック55は、同期を取るためのもので、A/Dコンバータ31,35に入力され、A/Dコンバータ31とA/Dコンバータ35の同期を取っている。
このノッチフィルタ51,54と、位相差計測器52と、周波数計測器53と、クロック55とによって位相計測演算器50が構成されている。
【0028】
図17には、デジタルフィルタとしてバンドパスフィルタ(BPF)を用いた変換器のブロック構成が示されている。
図17に図示の入出力ポート15、左速度信号入力端子19、右速度信号入力端子20、ローパスフィルタ30,34、A/Dコンバータ31,35は、図16に図示の入出力ポート15、左速度信号入力端子19、右速度信号入力端子20、ローパスフィルタ30,34、A/Dコンバータ31,35と同一の構成を有するものである。
【0029】
図17において、A/Dコンバータ31には、バンドパスフィルタ(BPF)61が接続されている。このバンドパスフィルタ61は、A/Dコンバータ31においてデジタル信号に変換された加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3の左側に生じる振動速度を検出する左速度センサ7から出力される左速度信号(出口側速度信号)を、周波数フィルタを通して、設定された周波数の左速度信号(出口側速度信号)のみを取り出す回路である。
このバンドパスフィルタ61には、位相計測器62が接続されており、この位相計測器62は、バンドパスフィルタ61によってS/N比を向上させた後のデジタル信号に変換された左速度信号の位相を計測するものである。
【0030】
また、バンドパスフィルタ61には、周波数計測器63が接続されている。この周波数計測器63は、A/Dコンバータ31によってデジタル信号に変換され、バンドパスフィルタ61によってS/N比を向上させた後の左速度信号の周波数を計測するものである。
そして、この周波数計測器63において計測された周波数は、バンドパスフィルタ61に入力される。
【0031】
また、A/Dコンバータ35には、バンドパスフィルタ64が接続されている。このバンドパスフィルタ64は、A/Dコンバータ35においてデジタル信号に変換された加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3の右側に生じる振動速度を検出する右速度センサ8から出力される右速度信号(入口側速度信号)を、周波数フィルタを通して、設定された周波数の右速度信号(入口側速度信号)のみを取り出す回路である。
このバンドパスフィルタ64には、位相計測器62が接続されており、この位相計測器62は、バンドパスフィルタ64によってS/N比を向上させた後のデジタル信号に変換された左速度信号の位相を計測するものである。
【0032】
また、バンドパスフィルタ64には、周波数計測器63が接続されている。そして、この周波数計測器63において計測された周波数は、バンドパスフィルタ64に入力される。
図17において、クロック65は、同期を取るためのもので、クロック65からのクロック信号は、A/Dコンバータ31,35に入力され、A/Dコンバータ31とA/Dコンバータ35の同期を取っている。
このバンドパスフィルタ61,64と、位相計測器62と、周波数計測器63と、クロック65とによって位相計測演算器60が構成されている。
【先行技術文献】
【特許文献】
【0033】
【特許文献1】特開平2−66410号公報
【特許文献2】特表平10−503017号公報
【特許文献3】特許第2799243号公報
【特許文献4】特許第2930430号公報
【特許文献5】特許第3219122号公報
【発明の概要】
【発明が解決しようとする課題】
【0034】
特許文献3に示すようなフーリエ変換を用いた位相計測方法にあっては、入力される振動速度の検出信号の入力周波数が一定である場合、周波数の選択においてフーリエ変換を用いるために、非常に周波数選択性の高い位相計測方法を行うことができる。
しかし、この特許文献3に示すようなフーリエ変換を使う方法にあっては、入力される振動速度の検出信号の入力周波数が、密度や温度などによって変化した場合、変換方法やサンプリングレートを変えなければならないために、演算周期や演算方法が変わり、測定値が変動し不安定になってしまう。
【0035】
さらに、特許文献3に示すようなフーリエ変換を使う方法にあっては、入力される振動速度の検出信号の入力周波数が、密度や温度などによって変化した場合、サンプリングレートを入力される振動速度信号の入力周波数に正確に同期させなければならないために、設計が非常に複雑なものになる。
このために被測定流体の温度や、気泡などが流体に混ざり密度が急激に変化した場合、極端に計測精度が落ちてしまうという問題点を有している。
加えて、特許文献3に示すようなフーリエ変換を使う方法にあっては、フーリエ変換を行うため、非常に演算処理が多くなってしまうという問題点を有している。
【0036】
特許文献4、特許文献5に示すようなノッチフィルタ、バンドパスフィルタなどのフィルタテーブルを持つことによって、入力周波数に併せた最適なテーブルを選択し、位相を計測する方法にあっては、サンプリングレートを固定することによって設計を単純化することができる。
しかし、特許文献4、特許文献5に示すようなデジタルフィルタを用いた位相計測方法も特許文献3に示すようなフーリエ変換を使う方法と同様に、入力周波数の変化に対して非常に多くのフィルタテーブルを持つこととなり、演算器のメモリの消費が大きくなってしまうという問題点を有している。
【0037】
また、特許文献4、特許文献5に示すようなデジタルフィルタを用いた位相計測方法にあっては、入力周波数が急激に変化した場合に最適なフィルタを選択することが困難になってしまうという問題点を有している。
さらに、特許文献4、特許文献5に示すようなデジタルフィルタを用いた位相計測方法にあっては、周波数の選択能力を上げるために、非常に多くの演算をしなければならないという問題点を有している。
【0038】
この特許文献4、特許文献5に示すようなデジタルフィルタを用いた位相計測方法にあっては、以下に示す如き問題を有している。
(1)入力周波数の変化に対して精度良く追従することができない。すなわち、被測定流体の密度が急速に変化する気泡混入時での計測などを実現することが非常に困難である。
(2)周波数の選択能力を向上させるためには、非常に多くの演算をしなければならない。このため高速な応答性を実現させることが困難であり、短時間でのバッチ処理などに不向きである。
(3)演算器メモリの消費が大きく、設計が複雑になってしまう。したがって、回路構成や設計が複雑になり、コスト的に非常にデメリットになる。
【0039】
以上総合すると、従来のデジタルフィルタ処理による位相計測方法にあっては、いずれも測定チューブ2,3のチューブ振動数以外の帯域のノイズを取り除くため、常に測定チューブ2,3のチューブ周波数に追従するようにフィルタテーブルの切り替えや演算方法の変更、さらには、サンプリングレートの変更などを行う必要があるために、非常に複雑且つ高速性に欠ける演算を行わなければならないという問題点を有していた。
このため、加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3の右側に生じる振動速度を検出する右速度センサ8,測定チューブ2,3の左側に生じる振動速度を検出する左速度センサ7によって検出される振動速度信号の入力周波数が変動するたびに演算誤差を生じ易く、非常に計測精度が悪いものであるという問題点を有していた。
【0040】
本発明の目的は、被測定流体の温度が変化したり、被測定流体に気泡が混入したり、被測定流体が気体から液体に急速に変化した場合であっても、常に一定の精度で計測することができ、高いフィルタリング能力をもった位相計測、及び周波数計測を実現し、極めて少ない演算処理量で行うことのできる信号処理方法、信号処理装置、及びコリオリ流量計を提供することにある。
【課題を解決するための手段】
【0041】
上記課題を解決するためなされた請求項1に記載の信号処理方法は、測定用の流管を構成する少なくとも一本、又は一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである2つの速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
前記速度センサ若しくは加速度センサから検出される前記フローチューブに作用するコリオリの力に比例した振動周波数の入力信号をA/D変換して得る2つの流量信号の各々について任意の発振周波数に基づいて合成して周波数変換し,
少なくとも一方のセンサの合成波形の周波数を計測し,
前記計測した周波数に基づいて制御信号を発信し,
前記合成周波数信号の合成した合成成分の和分または差分の成分の周波数が常に一定となるように制御し,
前記制御信号よりフローチューブの共振周波数を求め、被計測流体の密度を算出し、
前記制御された各々の変換合成周波数の和分または差分の信号から位相を計測することを特徴としている。
【0042】
上記課題を解決するためなされた請求項2に記載の信号処理方法は、請求項1に記載の信号処理方法の前記任意の発振周波数に基づく合成周波数変換を,
前記一方のセンサからの入力信号SINθ1と、前記発信する制御信号cosθ2とを掛け算し,
前記掛け算して出力される出力信号を周波数フィルタを通して、低い周波数の信号のみ取り出すようにしたものである。
【0043】
上記課題を解決するためなされた請求項3に記載の信号処理方法は、請求項1に記載の信号処理方法の前記任意の発振周波数に基づく合成周波数変換を,
前記一方のセンサからの入力信号SINθ1と、前記発信する制御信号cosθ2とを掛け算し,
前記掛け算して出力される出力信号を周波数フィルタを通して、高い周波数の信号のみ取り出すようにしたものである。
【0044】
上記課題を解決するためなされた請求項4に記載の信号処理方法は、請求項1に記載の信号処理方法の前記速度センサ若しくは加速度センサから検出される前記フローチューブに作用するコリオリの力に比例した振動周波数の入力信号は、
前記A/D変換においてサンプリングしてデジタル信号化が行われ,
前記発信する制御信号に基づいて合成周波数変換して得られる各々の変換合成周波数信号は,
合成した合成成分の和分または差分の成分の周波数が前記A/D変換時のサンプリング周波数の1/4になるように制御するようにしたものである。
【0045】
上記課題を解決するためなされた請求項5に記載の信号処理装置は、測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器90と,
前記速度センサ若しくは加速度センサによって検出される入力信号からの入力周波数と、前記発信器90の出力周波数FXを加算(又は減算)して周波数変換し、該周波数変換後の周波数値が常に一定になるように周波数シフトする周波数変換器85と,
前記周波数変換器85から出力される変換された周波数信号の位相差の計測を行う位相差計測部95と,
によって構成したことを特徴としている。
【0046】
上記課題を解決するためなされた請求項6に記載の信号処理装置は、測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該少なくとも一本、若しくは一対のフローチューブを振動させて、振動検出センサである一対の速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器120と,
前記一対の振動検出センサの一方のセンサを第1のA/Dコンバータ31によってデジタル信号に変換された該入力信号周波数θと、前記発信器120から出力される出力周波数θXnとを加算(または減算)して該周波数変換後の周波数値が常に一定になるように周波数変換する第1の周波数変換部110と,
前記一対の振動検出センサの他方のセンサを第2のA/Dコンバータ35によってデジタル信号に変換された該入力信号周波数θと、前記発信器120から出力される出力周波数θXnとを加算(または減算)して該周波数変換後の周波数値が常に一定になるように周波数変換する第2の周波数変換部140と,
によって構成したことを特徴としている。
【0047】
上記課題を解決するためなされた請求項7に記載の信号処理装置は、測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである一対の振動検出センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器120と,
前記一対の振動検出センサの一方の速度センサを第1のA/Dコンバータ31によってデジタル信号に変換された該入力信号周波数θを、前記発信器120から出力される出力周波数θXnを用いて、特定した一定周波数信号に周波数シフトして所望の周波数帯域に移動する第1の周波数変換部110と,
前記一対の振動検出センサの他方の速度センサを第2のA/Dコンバータ35によってデジタル信号に変換された該入力信号周波数θを、前記発信器120から出力される出力周波数θXnを用いて、常に一定の一定周波数信号に周波数シフトして所望の周波数帯域に移動する第2の周波数変換部140と,
前記第1の周波数変換部110から出力される特定した一定周波数信号に変換された第1の周波数信号の周波数を計測し、該計測した第1の周波数信号の周波数値を前記発信器120に出力して、前記周波数変換部110において周波数変換を行った後の周波数が、前記第1のA/Dコンバータ31によってデジタル信号に変換されて入力される一対の振動検出センサの一方の速度センサ信号の入力周波数を所望の周波数になるように第1及び第2の周波数変換部の出力周波数をコントロールする周波数計測部160と,
によって構成したことを特徴としている。
【0048】
上記課題を解決するためなされた請求項8に記載の信号処理装置は、請求項5,6又は7に記載の信号処理装置の前記周波数変換部110を,
前記発信器120からの参照信号cosθ2と、前記第1のA/Dコンバータ31からの入力信号SINθ1を掛け算する掛け算器111と,
前記掛け算器111において掛け算して出力されてくる出力信号を周波数フィルタを通して、低い周波数の信号のみ取り出すローパスフィルタ112と,
によって構成したことを特徴としている。
【0049】
上記課題を解決するためなされた請求項9に記載の信号処理装置は、請求項5,6又は7に記載の信号処理装置の前記周波数変換部110を,
前記発信器120からの参照信号cosθ2と、前記第1のA/Dコンバータ31からの入力信号SINθ1を掛け算する掛け算器111と,
前記掛け算器111において掛け算して出力されてくる出力信号を周波数フィルタを通して、高い周波数の信号のみ取り出すハイパスフィルタ112と,
によって構成したことを特徴としている。
【0050】
上記課題を解決するためなされた請求項10に記載の信号処理装置は、請求項7,8又は9に記載の信号処理装置の前記周波数計測部160を,
前記第1の周波数変換部110に接続される掛け算器161と、該掛け算器161に接続されるローパスフィルタ162と、該ローパスフィルタ162に接続され、該ローパスフィルタ162からの出力信号を入力する周波数計測用発信器163とからなり,
前記掛け算器161は、周波数変換部110から出力される出力信号sin(θ+θXn)と、周波数計測用発信器163から出力される出力信号cosδの位相を比較し、その差信号と和信号として後段のローパスフィルタ162に出力するもので,
前記ローパスフィルタ162は、前記掛け算器161から出力される出力信号を周波数フィルタを通して、低い周波数の信号のみ取り出す回路で,
該ローパスフィルタ162から出力される低い周波数の信号を基に基本出力波形の位相量Vが生成され,該位相量Vは前記周波数計測用発信器163によって常に、
V=0
なる条件を満たす
ことを特徴としている。
【0051】
上記課題を解決するためなされた請求項11に記載の信号処理装置は、請求項7,8,9又は10に記載の信号処理装置の前記第1のA/Dコンバータ31と前記第2のA/Dコンバータ35の出力の同期を取るクロックを設け,
前記第1のA/Dコンバータ31から出力される一対の振動検出センサの一方のデジタル信号と、前記第2のA/Dコンバータ35から出力される一対の振動検出センサの他方のデジタル信号との同期を取るようにしたことを特徴としている。
【0052】
上記課題を解決するためなされた請求項12に記載の信号処理装置は、請求項7,8,9,10又は11に記載の信号処理装置の前記位相計測部の処理を,DFT(Discrete Fourier Transform:離散フーリエ変換)又は、FFT(Fast Fourier Transform:高速フーリエ変換)で構成したものである。
【0053】
上記課題を解決するためなされた請求項13に記載のコリオリ流量計は、測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである一対の速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器120と,
前記一対の振動検出センサの一方の速度センサを第1のA/Dコンバータ31によってデジタル信号に変換された該入力信号周波数θを、前記発信器120から出力される出力周波数θXnを用いて、特定した一定周波数信号に周波数シフトして所望の周波数帯域に移動する第1の周波数変換部110と,
前記一対の振動検出センサの他方の速度センサを第2のA/Dコンバータ35によってデジタル信号に変換された該入力信号周波数θを、前記発信器120から出力される出力周波数θXnを用いて、特定した一定周波数信号に周波数シフトして所望の周波数帯域に移動する第2の周波数変換部140と,
前記第1の周波数変換部110から出力される特定した一定周波数信号に変換された第1の周波数信号の周波数を計測し、該計測した第1の周波数信号の周波数値を前記発信器120に出力して、前記周波数変換部110において周波数変換を行った後の周波数が、前記第1のA/Dコンバータ31によってデジタル信号に変換されて入力される一対の振動検出センサの一方の速度センサ信号の入力周波数を所望の周波数になるように第1及び第2の周波数変換部の出力周波数をコントロールする周波数計測部160と,
によって構成したことを特徴としている。
【発明の効果】
【0054】
コリオリ式流量計のフローチューブには、たとえば湾曲管のものやストレート管などである。また測定管を駆動するモードにおいても1次や2次のモードなどさまざまなモードにおいて駆動されるタイプが存在する。
周知の如くフローチューブから得られる駆動周波数帯域は数十Hz〜数KHzに及ぶ、たとえばU字管を用いて1次のモードでフローチューブを振動させた場合、周波数は100Hz前後であり、またストレート形状のフローチューブを1次のモードで振動させた場合は、500Hz〜1000Hz程度が実現されている。
しかし、ひとつの流量計変換器に於いて、コリオリ流量計の位相、及び周波数計測を、数十Hz〜数KHzの周波数帯域で常に同様な処理を用いて位相計測を行うことは非常に困難で、数種のタイプに分けて設計する必要があった。
【0055】
本発明に係る信号処理方法によれば、同定のアルゴリズムに基づく有利な信号処理によって、上記の如き本質的な課題を払拭でき、かつ被測定流体の温度変化や、気泡混入、さらに被測定流体が気体から液体に急速に変化した場合であっても、常に安定した精度で位相、及び周波数計測を行うことができ、高い性能を提供できる。
【0056】
本発明に係る信号処理装置によれば、被測定流体の温度が変化したり、被測定流体に気泡が混入したり、被測定流体が気体から液体に急速に変化した場合であっても、常に安定した精度で計測することができ、位相、及び周波数計測を少ない演算量で行うことができる。
【0057】
本発明に係るコリオリ流量計によれば、被測定流体の温度が変化したり、被測定流体に気泡が混入したり、被測定流体が気体から液体に急速に変化した場合であっても、常に安定した精度で計測することができ、位相、及び周波数計測を少ない演算量で行うことができる。
【図面の簡単な説明】
【0058】
【図1】本発明に係る信号処理装置の原理を示すブロック図である。
【図2】図1に図示の信号処理装置の具体的構成を示すブロック図である。
【図3】図2に図示の信号処理装置のフィードバック制御の方法による具体的構成を示すブロック図である。
【図4】図3に図示のLPFからの出力信号を示す図である。
【図5】図3に図示のA/Dコンバータからの出力信号を示す図である。
【図6】図3に図示の発信器からの出力信号を示す図である。
【図7】図3に図示の周波数変換部の掛け算器における出力信号を示す図である。
【図8】図3に図示の周波数変換部からの出力信号を示す図である。
【図9】図3に図示の信号処理装置の具体的構成図のタイムチャートを示す図である。
【図10】図3に図示の信号処理装置の具体的構成図の動作フローチャートである。
【図11】図3に図示の信号処理装置の周波数変換部のブロック構成図である。
【図12】図3に図示の信号処理装置の周波数計測部のブロック構成図である。
【図13】本発明が適用される一般的なコリオリ流量計の構成図である。
【図14】図13に図示のコリオリ流量計の変換器のブロック構成図である。
【図15】図14に図示の変換器のフーリエ変換を用いた位相計測方法を示すブロック図である。
【図16】図14に図示の変換器のノッチフィルタを用いた位相計測方法を示すブロック図である。
【図17】図14に図示の変換器のバンドパスフィルタを用いた位相計測方法を示すブロック図である。
【発明を実施するための形態】
【0059】
本発明は、常に一定の精度で計測することができ、極めて少ない演算処理量で行うことができるという目的を、被測定流体の温度が変化したり、被測定流体に気泡が混入したり、被測定流体が気体から液体に急速に変化した場合においても、実現できるようにした。
【実施例1】
【0060】
以下、本発明を実施するための形態の実施例1について図1〜図9を用いて説明する。
図1は本発明に係る信号処理方法、およびその装置の原理図、図2は図1に図示の原理図の詳細回路図、図3は図2に図示の信号処理装置のフィードバック制御の方法による具体的構成を示すブロック図、図4は図3に図示のLPFからの出力信号を示す図、図5は図3に図示のA/Dコンバータからの出力信号を示す図、図6は図3に図示の発信器からの出力信号を示す図、図7は図3に図示の周波数変換部の掛け算器における出力信号を示す図、図8は図3に図示の周波数変換部からの出力信号を示す図、図9は図3に図示の信号処理装置の具体的構成図のタイムチャートを示す図である。
【0061】
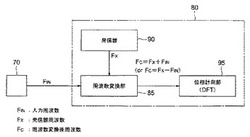
図1において、加振器(例えば、電磁オシレータ)6によって測定チューブ2,3を振動したときに、測定チューブ2,3に生じる振動速度は、振動速度センサ(例えば、速度センサ又は加速度センサ)70によって検出され、この検出された振動速度は、振動速度信号演算器80において演算処理される。この振動速度センサ70は、図13における左速度センサ7と右速度センサ8に相当している。
【0062】
振動速度信号演算器80は、周波数変換部85と、発信器90と、位相差計測器95とによって構成される。
周波数変換部85は、振動速度センサ70によって検出される加振器6によって測定チューブ2,3を振動したときに測定チューブ2,3に生じる振動速度を周波数変換するものである。この周波数変換部85には、発信器90からの信号が入力されるようになっている。
そして、この周波数変換部85において周波数変換された信号は、周波数変換部85の後段に設けられている位相差計測器95に入力される。この位相差計測器95は、振動速度センサ70からの速度信号をA/D変換しデジタル変換処理をした後、その位相差を求めるものである。
【0063】
図1に図示の信号処理方法、およびその装置は、入力信号を周波数変換し、周波数変換後の周波数が一定になるようにコントロールし、周波数変換後に位相計測を行うことによって、入力信号の周波数が変化しても高速で、かつ常に一定な高精度な位相計測を行なうことができるフィルタ処理装置を実現している。
すなわち、図1に図示の信号処理方法、およびその装置80は、振動速度センサ70入力信号からの入力周波数FINと発信器90の出力周波数FXを周波数変換器85で掛け算し、その結果、両信号の位相差を加算(又は減算)し、周波数変換後の周波数が一定になるように発信器90をコントロールすることによって、位相計測部95に入力される周波数が常に一定となるように制御し、周波数変換後の信号から位相計測を行うものである。
【0064】
このように構成することにより、入力周波数に応じた多くのフィルタや、演算方法の変更など複雑な処理を一切行うことなく、常に一定で誤差のほとんどない高速な演算を行うことができる。
〔式1〕
Fc=FX+FIN (or Fc=FX−FIN) ……………(1)
この〔式1〕の演算式において、Fcは、周波数変換後の周波数を、FINは、入力周波数(測定用流管の振動周波数)を、FXは、発信器の発信周波数をそれぞれ示している。
【0065】
ここで、被計測流体の密度を得る方法について説明する。
密度の計測をするに当っては、測定チューブ2,3の振動周波数を計測する必要がある。したがって、周波数変換をする前の周波数値を求めればよいことになる。
図1に示される信号処理方法、及び信号処理装置においては、振動速度センサ7から出力される加振器6によって測定チューブ2,3を振動したときに測定チューブ2,3に生じる振動速度を周波数変換部85において周波数変換し、この周波数変換部85における周波数変換後の周波数が一定になるようにコントロールしている。
【0066】
この〔式1〕の演算式において、周波数変換後の周波数Fcは、常に一定になるように制御されるため既知の値である。
さらに、FXは、発信器90の発信周波数であり、この発信器90の発信周波数FXの値をコントロールすることによって周波数変換後の周波数Fcを一定にするためには、当然のことではあるが、発信器90の発信周波数FXは、既知の値である。この発信器90の発信周波数FXの値が既知の値でなければコントロールできない。
したがって、既知の値である周波数変換後の周波数Fcと発信器90の発信周波数FXを〔式1〕に代入すると、入力周波数FIN(測定用流管の振動周波数)を求めることができる。
フローチューブの振動周期Tと、流体密度ρの関係は、密度計測装置固有の定数(使用される装置固有の値を有している)をA,Bとすると、
〔式2〕
ρ=AT2+B …………………………(2)
で表せることが知られている。要するに、装置固有のA,Bを知ることができれば、フローチューブ振動周期Tを測定することにより、流体密度ρを求めることができる。 この処理は、リアルタイムで行われているため測定チューブ2,3管の被測定流体の密度を得ることができる。
なお、詳細な密度の演算式は、特願2001−34989号(特開2002−243613号)において明らかにしてある。
【0067】
図2には、図1に図示の信号処理装置の具体的構成が示されている。
図2において、レフトピックオフ(LPO)7(左速度センサ7に相当)には、ローパスフィルタ30が接続されている。すなわち、加振器6によって振動したときに測定チューブ2,3の左側に生じる振動速度の検出信号(出口側速度信号)をレフトピックオフ7が検出すると、この振動速度の検出信号(出口側速度信号)は、ローパスフィルタ30に入力される。
このローパスフィルタ30は、加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3の左側に生じる振動速度を検出する左速度センサ7から出力される左速度信号(出口側速度信号)を周波数フィルタを通して、低い周波数の左速度信号(出口側速度信号)のみを取り出す回路である。
【0068】
このローパスフィルタ30には、A/Dコンバータ31が接続されている。このA/Dコンバータ31は、ローパスフィルタ30から出力されてくるアナログ信号である左速度信号(出口側速度信号)をデジタル信号に変換するものである。このA/Dコンバータ31においてデジタル信号に変換された左速度信号(出口側速度信号)は、信号処理装置100に入力される。
また、この信号処理装置100は、A/Dコンバータ31に接続されている。この信号処理装置100は、入力信号(出口側速度信号)を後段の位相計測器で処理される所望な周波数に周波数変換し、周波数変換後に位相計測を行うことによって、入力周波数の帯域をシフトさせ、かつ安定的な位相計測が行えるようにするものである。
【0069】
一方、ライトピックオフ(RPO)8(右速度センサ8に相当)には、ローパスフィルタ34が接続されている。すなわち、加振器6によって振動したときに測定チューブ2,3の右側に生じる振動速度の検出信号(入口側速度信号)をライトピックオフ8が検出すると、この振動速度の検出信号(入口側速度信号)は、ローパスフィルタ34に入力される。
このローパスフィルタ34は、加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3の右側に生じる振動速度を検出する右速度センサ8から出力される右速度信号(入口側速度信号)を周波数フィルタを通して、低い周波数の右速度信号(入口側速度信号)のみを取り出す回路である。
【0070】
このローパスフィルタ34には、A/Dコンバータ35が接続されている。このA/Dコンバータ35は、ローパスフィルタ34から出力されてくるアナログ信号である右速度信号(入口側速度信号)をデジタル信号に変換するものである。 また、この信号処理装置100は、A/Dコンバータ35に接続されている。この信号処理装置100は、入力信号(入口側速度信号)を後段の位相計測器で処理される所望な周波数に周波数変換し、周波数変換後に位相計測を行うことによって、入力周波数の帯域をシフトさせ、かつ安定的な位相計測が行えるようにするものである。
【0071】
A/Dコンバータ31には、周波数変換部110が接続されている。この周波数変換部110は、A/Dコンバータ31から出力されて入力される左速度信号(出口側速度信号)のデジタル信号を後段の位相計測器で処理される所望な周波数に周波数変換するものである。
また、A/Dコンバータ35には、周波数変換部140が接続されている。この周波数変換部140は、A/Dコンバータ35から出力されて入力される右速度信号(入口側速度信号)のデジタル信号を前記同様、所望な周波数に周波数変換するものである。
【0072】
また、周波数変換部110には、発信器120からの信号が入力するように構成されている。この発信器120から出力される信号が周波数変換部110に入力されることによって、周波数変換部110においては、レフトピックオフ7から入力される入力信号(出口側速度信号)を発信器120から出力される信号によって周波数変換している。
この周波数変換部110において周波数変換された信号は、発信器120の出力信号によって所望の一定の周波数信号に変換されるようになっている。
【0073】
また、周波数変換部140にも、発信器120からの信号が入力するように構成されている。この発信器120から出力される信号が周波数変換部140に入力されることによって周波数変換部140においては、ライトピックオフ8から入力される入力信号(入口側速度信号)を発信器120から出力される信号によって周波数変換している。
この周波数変換部140において周波数変換された信号は、発信器120の出力信号によって所望の一定の周波数信号に変換されるようになっている。
【0074】
このように発信器120によってコントロールされると、この発信器120から出力される出力周波数によって、周波数変換部110同様、周波数変換部140においても、周波数変換を行った後の周波数が、A/Dコンバータ35から入力される右速度信号(入口側速度信号)は後段の位相計測器130で処理される所望な周波数に制御される。
【0075】
この位相差計測器130では、A/Dコンバータ31から出力され周波数変換部110に入力される左速度信号(出口側速度信号)の入力周波数と、A/Dコンバータ35から出力され周波数変換部140に入力される右速度信号(入口側速度信号)の入力周波数とが同時に周波数変換されて入力され、位相差計測が行われる。
このように構成することにより、本実施の形態によれば、入力周波数(左速度信号,右速度信号)を所望の周波数帯域に同時に変換することによって、入力周波数(左速度信号,右速度信号)が変わっても、常に位相計測処理周波数を一定化して、フィルタのテーブル数を大幅に減らし、また位相計測処理をより効果的に行うことができる。
本発明の効果として、入力周波数に応じた多くのフィルタや、演算方法の変更など複雑な処理を一切行うことなく、常に一定で誤差のほとんどない高速な演算を行うことが可能となることである。もちろん位相計測部の処理は、DFT(Discrete Fourier Transform:離散フーリエ変換)でも、FFT(Fast Fourier Transform:高速フーリエ変換)でも実現が可能である。
【0076】
A/Dコンバータ31とA/Dコンバータ35には、クロック150から、クロック信号が入力するようになっている。このクロック150は、A/Dコンバータ31から出力される左速度信号のデジタル信号と、A/Dコンバータ35から出力される右速度信号のデジタル信号の同期を計り、同時サンプリングを実現している。
この周波数変換部110と、発信器120と、位相差計測器130と、周波数変換部140と、クロック150とによって信号処理装置100が構成されている。
【0077】
このようにA/Dコンバータ31,35によってデジタル信号に変換されたそれぞれの入力信号(左速度信号,右速度信号)は、周波数変換部110,140において、発信器120からの出力信号を用いて周波数変換される。
【0078】
次に、図2に図示の信号処理装置100における位相差計測演算の具体的な演算方法について説明する。
コリオリ流量計1の加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3に設けられる振動速度センサ70(レフトピックオフ7,ライトピックオフ8)からの出力信号(左速度信号,右速度信号)を図2に図示の如く、LPO(レフトピックオフ7)、RPO(ライトピックオフ8)の入力信号として得る。
このとき、LPO、RPOの入力信号を定義すると、(δφ:LPOとRPO間の位相差とする)
〔式3〕
ライトピックオフ : sin(θ) ………………(3)
〔式4〕
レフトピックオフ : sin(θ+δφ) ………………(4)
となる。
【0079】
この2つの振動速度センサ(レフトピックオフ7,ライトピックオフ8)からの出力信号(左速度信号LPO,右速度信号RPO)は、コリオリ流量計1の変換器5の内部のローパスフィルタ30,34をそれぞれ通って、A/D変換器31,35によってアナログ値からデジタル値に変換され、信号処理装置100に送られる。
この信号処理装置100は、前述した如く、周波数変換部110と、発信器120と、位相差計測部130と,周波数変換部140の4つのブロックによって構成されており、レフトピックオフ7からの出力信号LPOと、ライトピックオフ8からの出力信号RPOの位相差を演算した後、振動速度センサから出力される周波数と、温度センサ9によって検出される温度のデータをもとに流量信号に変換する。
なお、温度計測については、図中において説明しない。
【0080】
この周波数変換部110から出力される変換周波数は、レフトピックオフ(左速度センサ)7によって検出され、ローパスフィルタ30によって取り出された低い周波数の左速度信号(出口側速度信号)がA/Dコンバータ31においてデジタル信号に変換され出力されてくる入力信号周波数θと、発信器120から出力される出力周波数θXnとを加算(または減算)して求められる。
このように、周波数変換部110から出力され位相計測部130に入力される入力信号周波数は、周波数変換部110において、発信器120から出力される出力周波数θXnを用いて、A/Dコンバータ31から出力されるデジタル信号の低い周波数の左速度信号(出口側速度信号)である入力信号周波数θを周波数シフトして別の周波数帯域に移動したものとなる。
【0081】
このように周波数変換部110において周波数シフトされ出力される信号と、同様に処理される周波数変換部140において周波数シフトされ出力される信号は、位相計測部130において位相計算が行われる。
【0082】
周波数変換部110から出力される周波数計測値(θ+θXn)の値は、
〔式5〕
θC=θ+θXn ………………(5)
と、最終的に任意に設定した位相計測周波数設定値θCとなるように制御する。
このように位相計測部130に入力される周波数計測値(θ+θXn)が常に一定周波数θCになるように発信器120をコントロールすることによって後段の位相計測の高速処理を可能にすることができる。
【0083】
本発明における周波数の制御方法は、式(5)の条件をすべて周波数変換部(110,140)の出力周波数がθcに等しくなる様に発信器120の周波数を変化させる方式、すなわちフィードバック制御の方法によって構成してある。
以下、本発明に係る信号処理方法、信号処理装置の実施の形態について説明する。
図3には、図2に図示の信号処理装置のフィードバック制御の方法による具体的構成が示されている。
図3に図示の信号処理装置100は、入力信号(出入口側速度信号)を所望の周波数に周波数変換し、周波数変換後に位相計測を行うことによって、入力周波数の帯域を気遣うことなしに、かつ安定的な位相計測が行えるようにするものである。
【0084】
図3において、A/Dコンバータ31には、周波数変換部110が接続されている。この周波数変換部110は、A/Dコンバータ31から出力されて入力される左速度信号(出口側速度信号)のデジタル信号を周波数変換するものである。
また、A/Dコンバータ35には、周波数変換部140が接続されている。この周波数変換部140は、A/Dコンバータ35から出力されて入力される右速度信号(入口側速度信号)のデジタル信号を周波数変換するものである。
【0085】
また、周波数変換部110には、発信器120からの信号が入力するように構成されている。この発信器120から出力される信号が周波数変換部110に入力されることによって、周波数変換部110においては、レフトピックオフ7から入力される入力信号(出口側速度信号)を発信器120から出力される信号によって周波数変換している。
この周波数変換部110において周波数変換された信号は、発信器120の出力信号によって一定の周波数信号に変換されるようになっている。
【0086】
また、周波数変換部140にも、発信器120からの信号が入力するように構成されている。この発信器120から出力される信号が周波数変換部140に入力されることによって周波数変換部140においては、ライトピックオフ8から入力される入力信号(入口側速度信号)を発信器120から出力される信号によって周波数変換している。
この周波数変換部140において周波数変換された信号は、発信器120の出力信号によって一定の周波数信号に変換されるようになっている。
【0087】
このように可変調な発信器120によってコントロールされると、この発信器120から出力される出力周波数によって、周波数変換部110と同様、周波数変換部140においても、周波数変換される。
【0088】
また、周波数変換部110の出力端には、周波数計測部160と位相差計測部130が接続されている。この周波数計測部160は、周波数変換部110において周波数変換された出力周波数を計測するものである。
また、周波数変換部140には、位相差計測器130が接続されている。
この周波数計測部160は、周波数変換部110において、レフトピックオフ(左速度センサ)7によって検出され、ローパスフィルタ30によって取り出された低い周波数の左速度信号(出口側速度信号)をA/Dコンバータ31によってデジタル信号に変換され出力される入力信号周波数θと、発信器120から出力される出力周波数θXnとを加算(または減算)して求められる出力信号の周波数(θCn=θ+θXn)を計測するものである。
【0089】
この周波数計測部160において計測された周波数計測値は、発信器120に出力される。この発信器120においては、周波数計測部160から出力される出力信号周波数(θCn=θ+θXn)の計測値を入力すると、この出力信号周波数(θCn=θ+θXn)の計測値に基づいて、所定の周波数信号(θXn)を発信し、発信器120から周波数変換部110と周波数変換部140に出力する。
このような周波数変換部110→周波数計測部160→発信器120→周波数変換部110のフィードバックループによって、A/Dコンバータ31からの入力される左速度信号(出口側速度信号)の入力周波数と発信器120から出力される出力周波数を周波数変換部110で加算、又は減算をし、周波数変換部110において周波数変換される。
【0090】
この周波数変換部140から出力される変換周波数は、ライトピックオフ(右速度センサ)8によって検出され、ローパスフィルタ34によって取り出された低い周波数の右速度信号(入口側速度信号)がA/Dコンバータ35においてデジタル信号に変換された入力信号周波数(θ+δφ)と、発信器120から出力される出力周波数θXnとを加算(または減算)して求められる。
このように、周波数変換部140から出力され位相計測部130に入力される入力信号周波数は、周波数変換部140において、発信器120から出力される出力周波数θXnを用いて、A/Dコンバータ35から出力されるデジタル信号の低い周波数の右速度信号(入口側速度信号)である入力信号周波数(θ+δφ)を周波数シフトして別の周波数帯域に移動させることが可能となる。
【0091】
このように発信器120がコントロールされると、この発信器120から出力される出力周波数θXnによって、周波数変換部110と同様、周波数変換部140においても、周波数変換が行なわれる。
可変調な発信器120は、このように極めて容易な算式によって周波数コントロールされる。
【0092】
また、周波数変換部110には、位相差計測器130が接続されている。また、周波数変換部140には、位相差計測器130が接続されている。
この位相差計測器130は、A/Dコンバータ31から出力され周波数変換部110に入力される左速度信号(出口側速度信号)の周波数θと、A/Dコンバータ35から出力され周波数変換部140に入力される右速度信号(入口側速度信号)の周波数(θ+δφ)は共に同一の一定した所望の周波数に変換されて位相差計測を行う。
【0093】
このように構成することにより、本実施の形態によれば、入力周波数(左速度信号,右速度信号)を所望の周波数帯域に変換することによって、入力周波数(左速度信号,右速度信号)の帯域をシフトさせ、フィルタのテーブル数を大幅に減らし、また位相計測処理をより効果的に行うことができる。
本発明の効果として、入力周波数に応じた多くのフィルタや、演算方法の変更など複雑な処理を一切行うことなく、常に一定で誤差のほとんどない高速な演算を行うことが可能となることである。もちろん位相計測部の処理は、DFT(Discrete Fourier Transform:離散フーリエ変換)でも、FFT(Fast Fourier Transform:高速フーリエ変換)でも実現が可能である。
【0094】
A/Dコンバータ31とA/Dコンバータ35には、クロック150から、クロック信号が入力するようになっている。このクロック150は、A/Dコンバータ31とA/Dコンバータ35の出力の同期を取るもので、A/Dコンバータ31から出力される左速度信号のデジタル信号と、A/Dコンバータ35から出力される右速度信号のデジタル信号とのサンプリング誤差をなくす重要な役割を担っている。
このようにA/Dコンバータ31,35によってデジタル信号に変化されたそれぞれの入力信号(左速度信号,右速度信号)は、周波数変換部110,140において、発信器120からの出力信号を用いて周波数変換される。
【0095】
次に、図3に図示の信号処理装置100における位相差計測演算の具体的な演算方法について説明する。
ここでは、変調合成周波数の和成分信号による位相計測について説明する。
周波数変換部110の出力周波数を周波数計測部160によって計測し、その値を用いて発信器120の発信周波数をコントロールする。
信号処理装置100では、周波数変換部110の出力周波数を周波数計測部160によって計測する。
【0096】
初期状態においては、発信器120の出力信号θXnは、発信器120から出力されていないので、初期の発信器120からの出力信号θX0は、
〔式6〕
θX0=0 ………………(6)
となっている。
したがって、コリオリ流量計1の加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3に設けられるレフトピックオフ7から出力される出力信号(左速度信号)である流量信号LPOに対し、被周波数変調周波数の和成分周波数は、(θ+θXn)と表すことができるので、θXn=θX0で、周波数変換器110の出力信号周波数は、式(6)より、
〔式7〕
θco=θ+θX0=θ ………………(7)
となり、初期の計測周波数は、LPO信号周波数θにより起動される。
【0097】
次の第一次ステップの発信器120からの出力信号θX1において、位相計測周波数θC=目標周波数設定値=constとすべく初期計測周波数を比較する。そして次式(8)に示す如くこの差分が発信器120の出力信号となるように、θX1を決定する。
〔式8〕
θX1=θC−θ ………………(8)
と、発信器周波数θX1を求める。
そして、第一次ステップの発信器周波数θX1を求めることによってθC=constとなる。
次のステップの発信器120からの出力信号θX2において設定されるべき周波数変換部110の出力信号周波数は、
〔式9〕
θ+θX1=θC1 ………………(9)
となる。
【0098】
したがって、次のステップの発信器120からの出力信号θX2は、式(8)を元にして、
〔式10〕
θX2=θX1+θC−(θ+θX1) ………………(10)
となる。
【0099】
以上の動作を繰り返し行うと、
〔式11〕

となる。
【0100】
このようにクロック150の実時間処理クロックにしたがって、発信器120からの出力周波数θXnがコントロールされると、θXn≒θXn−1となる。
このことから、最終的に周波数変換部110の出力信号周波数(θ+θXn)は、
〔式12〕
θC=θ+θXn …………………(12)
となる。
したがって、時系列的処理において、式(12)により後段の位相計測の高速処理を可能にすることができる。
【0101】
図3に図示のローパスフィルタ30において、高調波ノイズを取り除きA/D変換時の折り返しノイズの影響を取り除くと、図4に示す如きsin信号(sinθ)が出力される。
このローパスフィルタ30から出力された図4に示す如きsin信号(sinθ)は、A/Dコンバータ31において、任意の一定周期でサンプリングしてデジタル信号化が行われ、図5に示す如きサンプリング信号(sinθ)が得られ、A/Dコンバータ31から出力される。
【0102】
このローパスフィルタ30から出力され、A/Dコンバータ31においてサンプリングされデジタル信号化が行われた図5に示す如き信号(sinθ)は、図3に図示の信号処理装置100の周波数変換部110に入力される。また、この周波数変換部110には、発信器120から出力される発信器出力信号が入力される。
この発信器120においては、周波数計測部160から出力される出力信号周波数(θCn=θ+θXn)の計測値の入力によって、この出力信号周波数(θCn=θ+θXn)の計測値に基づいて、所望な周波数で発信器120における発信周波数信号(θXn)を発信し、発信出力レートを入力信号のA/Dコンバータ31におけるサンプリング周期と同じレートで図6に示す如きcos信号(cosθXn)が出力する。
【0103】
発信器120からの出力信号(cosθXn)が周波数変換部110に入力されると、周波数変換部110においては、A/Dコンバータ31においてサンプリングされデジタル信号化が行われた図5に示す如き信号(sinθ)と、発信器120から出力される図6に示す如き出力信号(cosθXn)とを周波数変換部110内の掛け算器において掛け算(sinθ×cosθXn)を行って、図7に示す如き信号(sinθ×cosθXn)を得る。
この周波数変換部110内の掛け算器において掛け算(sinθ×cosθXn)を行って得た図7に示す如き信号(sinθ×cosθXn)は、周波数変換部110内において、ハイパスフィルタ(HPF)を通して、低い周波数成分を取り除いて、図8に示す如き信号(sinθC)を得る。この図8に示す如き信号(sinθC)は、周波数変換部110から出力されて、周波数計測部160と、位相差計測器130に入力される。
【0104】
コリオリ流量計1の加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3に設けられる振動速度センサ70(レフトピックオフ7,ライトピックオフ8)からの出力信号(左速度信号,右速度信号)は、図3に図示の信号処理装置100を構成する周波数変換部110,140と、発信器120と、位相差計測器130と、周波数計測部160の4つのブロックにおいて、位相差が演算された後、周波数計測部160から出力される周波数信号と、温度センサ9によって検出される温度のデータをもとに流量信号に変換される。
【0105】
次に、図9に示すタイムチャートを用いて、図3に図示の信号処理装置100における動作について説明する。
まず、図3に図示のローパスフィルタ30において、高調波ノイズを取り除きA/D変換時の折り返しノイズの影響を取り除くと、図5に示す如きsin信号(sinθ)が出力される。
この図5に示されるsin信号(sinθ)が出力されると、この図5に図示のsin信号(sinθ)がA/Dコンバータ31に入力される。そして、このA/Dコンバータ31においては、任意の一定周期でサンプリングしてデジタル信号化が行われ、図9(A)に示す如きサンプリング信号(Y1=sinθ)が得られ、A/Dコンバータ31から出力される。
【0106】
このA/Dコンバータ31から出力された図9(A)に図示のサンプリング信号(sinθ)は、図3に図示の信号処理装置100の周波数変換部110に入力される。
一方、信号処理装置100の周波数計測部160においては、周波数変換部110から出力される信号に基づいて計測された周波数(θCn=θ+θXn)信号が出力される。この周波数計測部160から出力される出力信号周波数(θCn=θ+θXn)の計測値が入力される発信器120においては、この出力信号周波数(θCn=θ+θXn)の計測値に基づいて、所望の発信周波数信号(θXn)を発信し、発信出力レートを入力信号のA/Dコンバータ31におけるサンプリング周期と同じレートで図9(B)に示す如きcos信号(Y2=cosθXn)を出力する。
【0107】
発信器120から図9(B)に図示のcos信号(Y2=cosθXn)が周波数変換部110に入力されると、周波数変換部110内の掛け算器においては、A/Dコンバータ31から出力される図9(A)に図示のサンプリング信号(Y1=sinθ)と掛け算(sinθ×cosθXn)を行って、図9(C)に示す如き信号(Y3=sinθ×cosθXn)を得る。
この周波数変換部110内の掛け算器において掛け算(sinθ×cosθXn)を行って得た図9(C)に図示の信号(Y3=sinθ×cosθXn)は、周波数変換部110内において、ハイパスフィルタ(HPF)を通して、低い周波数成分を取り除いて、図9(D)に示す如き信号(Y4=1/2・sinθC)を得る。この図9(D)図示の信号(Y4=1/2・sinθC)は、周波数変換部110から出力されて、周波数計測部160と、位相差計測器130に入力される。
【0108】
また、図3に図示のローパスフィルタ34において、高調波ノイズを取り除きA/D変換時の折り返しノイズの影響を取り除くと、sin信号(sin(θ+δφ))が出力される。
このsin信号(sin(θ+δφ))が出力されると、このsin信号(sin(θ+δφ))は、A/Dコンバータ35に入力される。そして、このA/Dコンバータ35においては、任意の一定周期でサンプリングしてデジタル信号化が行われる。
そして、このA/Dコンバータ35から出力される信号と、A/Dコンバータ35から出力されるサンプリング信号とを周波数変換部140内の掛け算器において掛け算を行って信号を得る。
【0109】
この周波数変換部140内の掛け算器において掛け算を行って得た信号は、周波数変換部110内において、ハイパスフィルタ(HPF)を通して、低い周波数成分を取り除いて、図9(E)に示す如き信号(Y5=1/2・sin(θC+δφ))を得る。この図9(E)図示の信号(Y5=1/2・sin(θC+δφ))は、周波数変換部110から出力されて、周波数計測部160と、位相差計測器130に入力される。
位相差計測器130においては、周波数変換部110から出力されて、位相差計測器130に入力される図9(D)図示の信号(Y4=1/2・sinθC)と、周波数変換部140から出力されて、位相差計測器130に入力される図9(E)図示の信号(Y5=1/2・sin(θC+δφ))とに基づいて、図9(F)に示す如き信号(Y6=δφ)を、その位相差δφとして出力する。
【0110】
このように演算周期をサンプリング時間と同期させることによって、位相計測時のリアルタイム性をあげることができる。
また、一対の振動速度信号(sinθ,sin(θ+δφ))は、どちらも同じ処理を行い位相計算されるため演算誤差がほとんど無く、正確な位相計算を行うことができる。
【実施例2】
【0111】
次に、図10に図示の動作フローチャートを用いて、信号処理方法について説明する。
図10には、フィードバックループを用いた場合の周波数変調および位相計測におけるフローチャートが示されている。
図10において、ステップ200では、演算器である信号処理装置100のパラメータを初期化する。この信号処理装置100のパラメータの初期化が行われると、ステップ200において、周波数変調における目標周波数、すなわち、周波数変調後の目標周波数の設定を行い、さらに、初期参照波形の周波数を設定、すなわち、参照信号周波数の初期設定を行う。
【0112】
ステップ200において、演算器である信号処理装置100のパラメータの初期化が行われ、周波数変調後の目標周波数の設定、参照信号周波数の初期設定が行われると、ステップ210において、レフトピックオフ(LPO)7(左速度センサ7)から出力される位相/及び速度信号をA/Dコンバータ31において任意のサンプリング周期でサンプリングしてデジタル信号化し、ライトピックオフ(RPO)8(右速度センサ8)から出力される位相/及び速度信号をA/Dコンバータ35において任意のサンプリング周期でサンプリングしてデジタル信号化する。
そして、このA/Dコンバータ31において任意のサンプリング周期でサンプリングしてデジタル信号化された位相/及び速度信号は、周波数変換器110に、A/Dコンバータ35において任意のサンプリング周期でサンプリングしてデジタル信号化された位相/及び速度信号は、周波数変換器140に、それぞれ入力される。
【0113】
このステップ210において任意のサンプリング周期でサンプリングしデジタル信号化されると、ステップ220において、参照信号用の発信器120に出力周波数を設定し、参照信号の生成を行う。参照信号の生成が行われると、この発信器120から、発信器120において設定された周波数の参照信号が出力され、周波数変換器110,140に入力される。
【0114】
このステップ220において発信器120に参照信号の生成が行われると、ステップ230において、周波数変換器110,140の処理が行われる。すなわち、発信器120から出力される参照周波数信号が入力された周波数変換器110においては、A/Dコンバータ31から出力されてくる位相/及び速度信号を発信器120から出力される参照信号を用いて、任意の周波数の位相/及び速度信号に変換する。
また、発信器120から出力される参照周波数信号が入力された周波数変換器140においては、A/Dコンバータ35から出力されてくる位相/及び速度信号を発信器120から出力される参照信号を用いて、任意の周波数の位相/及び速度信号に変換する。
【0115】
このステップ230において任意の周波数の位相/及び速度信号への変換が行われると、ステップ240において、周波数変換後の周波数が計測され、初期設定時の周波数変調における目標周波数と比較する。
すなわち、周波数変換器110において任意の周波数変換されたA/Dコンバータ31から出力されてくる位相及び速度信号は、周波数計測器160と位相計測器130に入力される。そして、この周波数計測器160において、周波数変換後の周波数が計測され、発信器120から出力される初期設定時の周波数変調における目標周波数と比較される。
【0116】
このステップ240において初期設定時の周波数変調における目標周波数と比較が行われると、ステップ250において、発信器120から出力される次回の参照信号の発信周波数の決定を行う。
すなわち、ステップ250においては、ステップ240において比較された差分の周波数が0Hzになるように、発信器120から出力される次回の参照信号の発信周波数の決定を行う。
このステップ250において発信器120から出力される次回の参照信号の発信周波数の決定を行うと、ステップ260において、位相計測を行う。
すなわち、ステップ260においては、発信器120から出力される参照信号の発信周波数に基づいて任意の一定周波数に変換された位相及び速度信号が位相計測器130に入力される。この位相計測器130においては、周波数変換器110から出力される任意の一定周波数に変換された位相及び速度信号に基づいて、FFT等を用いて位相計測する。このようにFFT等を用いて位相計測することによって、常に同じ演算周期で高精度な位相差計測が行える。
【0117】
以下に、信号処理装置100を構成する周波数変換部110,140と、発信器120と、位相差計測器130と、周波数計測部160の4つのブロックについて説明する。
(1)周波数変換部
信号処理装置100の周波数変換部110は、図11に示す如き構成を有している。
図11において、周波数変換部110は、掛け算器111と、ローパスフィルタ(LPF)112(又は、ハイパスフィルタ(HPF))で構成されている。
発信器120からの参照信号cosθ2と、A/Dコンバータ31からの入力信号SINθ1を掛け算し、その後、ローパスフィルタ112によってフィルタ処理を行う。
【0118】
まず、発信器120からの参照信号cosθ2と、レフトピックオフ(左速度センサ)7によって検出され、ローパスフィルタ30によって取り出された低い周波数の左速度信号(出口側速度信号)がA/Dコンバータ31においてデジタル信号に変換され出力される入力信号sinθ1を掛け算し、
〔式13〕
と、和と差の周波数信号を合成する。
この和と差の合成信号にローパスフィルタ(又は、ハイパスフィルタ)112を掛けることによって差の信号(又は、和の信号)のみを取り出す。
ここでは、具体的な説明をするため、和の信号を取り出すこととしているが、差の信号でも問題なく、周波数変換方法に応じてフィルタの処理方法は、適宜対応される。
【0119】
ローパスフィルタ(又は、ハイパスフィルタ)112からの出力は、
〔式14〕
となり、このときのローパスフィルタ(又は、ハイパスフィルタ)112からの出力信号周波数θ3は、常に一定になるようにコントロールされる。
このため、使用するフィルタは、入力信号によらず、常に同一のフィルタを用いることができる。
また、このことによって、周波数変換部110の後段の位相差計測器130における位相計測を非常に画一的に、かつ単純化して処理を行うことができる。
【0120】
(2)周波数計測部
周波数の計測方法としては、本実施の形態においては、PLL(PLL; Phase-locked loop 位相同期回路)の原理を用いる。このPLLは、入力される交流信号と周波数が等しく、かつ位相が同期した信号を、フィードバック制御により別の発振器から出力する電子回路が知られている。
このようにPLLは、もともと位相を同期するための回路で、入力信号に対して位相の同期した信号を作ることができるようになっている。
このPLLは、外部から入力された基準信号と、ループ内の発振器からの出力との位相差が一定になるよう、ループ内発振器にフィードバック制御をかけて発振させる発振回路で、演算器で構成することが比較的簡単で、さらに高速で演算することが可能である。
【0121】
信号処理装置100の周波数計測部160は、図12に示す如き構成を有している。
図12において、周波数計測部160は、掛け算器161と、ローパスフィルタ(LPF)162と、周波数計測用発信器163とによって構成されている。
周波数変換部110には、掛け算器161が接続されている。この周波数変換部110からは、レフトピックオフ(左速度センサ)7によって検出され、ローパスフィルタ30によって取り出された低い周波数の左速度信号(出口側速度信号)がA/Dコンバータ31においてデジタル信号に変換され出力されてくる入力信号周波数θと、発信器120から出力される出力周波数θXnとを加算(または減算)された変換周波数信号sin(θ+θXn)が出力され、掛け算器161に入力される。
【0122】
そして、この掛け算器161は、周波数変換部110の出力信号と、周波数計測用発信器163から出力される出力信号cosδの位相を比較し、その差信号と和信号としてローパスフィルタ162に出力するものである。
したがって、掛け算器161の出力端には、ローパスフィルタ162が接続されている。このローパスフィルタ162は、掛け算器161から出力される出力信号を周波数フィルタを通して、低い周波数の信号のみ取り出すものである。
したがって、ここでは、掛け算器161から出力される出力信号の中で差の成分のみを取り出している。
【0123】
また、ローパスフィルタ162には、周波数計測用発信器163が接続されている。この周波数計測用発信器163は、ローパスフィルタ162から出力される低い周波数の信号を基に位相データδを生成するものである。
そして、このローパスフィルタ162によって濾波出力される差の成分のみの出力データV(周波数演算関数V)が0になるように帰還ループが形成される。
【0124】
図12に図示のように周波数変換部110から出力され掛け算器161に入力される入力信号をSINθ、発信器120から出力され掛け算器161に入力される出力信号をcosδとおき、その2つの波形を掛け算器161において掛け算すると、
〔式15〕
となる。
この式(15)に示される掛け算器161における掛け算結果をローパスフィルタ162を掛けることによって、高い周波数成分が除去され、
〔式16〕
V=sin(θ−δ) …………………(16)
となる。
【0125】
式(15)の(θ−δ)の値が十分小さい値(V≒0)のとき、掛け算器161における掛け算結果を示す周波数演算関数Vは、
〔式17〕
V=θ−δ≒0 …………………(17)
で近似することができる。
ここで、周波数演算関数Vが0になるように周波数計測用発信器163の出力波形をコントロールすることによって、周波数変換部110において周波数変換した後の位相θを求めることができる。
【0126】
このようにして求めた周波数変換部110から出力される周波数変換後の位相θを、次の式(17)、式(18)を用いて演算することによって周波数fを求めることができる。
〔式18〕
ここで、ΔTは、時間変化を表しており、演算周期(サンプリングレート)と等しくなる。
したがって、位相変化(θ)は、
〔式19〕
θ=2・π・f・Ta ……………………(19)
但)Ta:時間変化(サンプリング周期)(sec)
f:入力周波数(Hz)
θ:位相変化(rad)
となる。
【0127】
そして、入力周波数fは、
〔式20〕
となる。
このような計算を周波数計測器160において行うことによって、高速な周波数計測を行うことができる。
【0128】
(3)発信器
図3において可変調な発信器120は、周波数計測部160の計測結果(θ+θXn)に基づいて出力周波数が制御される。
すなわち、発信器120は、加振器6によって測定チューブ2,3を振動したときにレフトピックオフ7によって検出され周波数変換部110に入力される測定チューブ2,3の左側に生じる振動速度の検出信号(出口側速度信号)の周波数θを位相差計測器130で処理される所望な周波数に制御する。
この周波数変換部110と周波数変換部140とは、同じ構成となっている。このため、周波数変換部110から出力される周波数同様、周波数変換部140から出力される周波数は、加振器6によって測定チューブ2,3を振動したときにライトピックオフ8によって検出され周波数変換部140に入力される測定チューブ2,3の右側に生じる振動速度の検出信号(入口側速度信号)の周波数(θ+δφ)を所望な周波数に変換する。
【0129】
(4)位相計測器
位相計測の方法には、種々な方法があるが、フーリエ変換を用いた位相計測の場合、周波数が固定されているため、非常に演算を高速に行うことが可能となる。
以下に、離散フーリエ変換(Discrete Fourier Transform;DFT)を例にとって説明する。この離散フーリエ変換というのは、離散群上のフーリエ変換であり、信号処理などで離散化されたデジタル信号の周波数解析などによく使われ、偏微分方程式や畳み込み積分を効率的に計算するためにも使われるものである。この離散フーリエ変換は(計算機上で)高速フーリエ変換(FFT)を使って高速に計算することができる。
【0130】
いま、位相差計測器130において、サンプリングされた入力信号をg(n)とすると、そのDFT G(k)は、
〔式21〕
と定義される。
【0131】
さらに表現を簡潔にするために、複素指数関数の部分を、
〔式22〕
と置き換えて表現すると、式(21)は、
〔式23〕
となる。
【0132】
ここで、複素指数関数WNnkに注目し、さらにNを、N=2M(M:整数)たとえば、N=8として考えると、入力周波数がサンプリング周波数の1/4の時、三角関数の周期性より実数部と虚数部の関数を、
〔式24〕
と、0.1,−1で表現することができる。
このようにして、サンプリング周波数の1/4に周波数変換した入力信号LPO,RPOを非常に簡単にフーリエ変換することができ、さらに通常位相計測においては、単一の周波数(振動周波数)のみフーリエ変換すればよいので、他の周波数帯域について変換は行わないため、加減算のみで演算することが可能である。
【0133】
実際には、位相差計測器130に入力された入力信号をg(n)とし、入力信号をg(n)がサンプリングレートの1/4の周波数とし、さらにNを、N=2M(M:整数)とした場合、そのDFT G(n)の演算は、
〔式25〕
のように演算することができる。
Mの値が大きくなっても基本的な演算は全く変わらないので、Mを大きくするほど非常に精度良く計算することが可能であり、演算負荷もほとんど変わらない。
【0134】
さらに、2つの入力信号を前述の手順によって離散フーリエ変換(DFT)した結果、RPO信号を、
〔式26〕
とおき、LPO信号を、
〔式27〕
とおくことが可能である。
【0135】
このときの入力信号の位相角tanδφは、
〔式28〕
となる。
【0136】
この式(28)において、入力信号の位相角tanδφを求めた後、そのtan−1δφを演算して位相差信号δφを求めることができる。
また、被測定流体の質量流量Qは、位相角に比例し駆動周波数Fに反比例することから、
〔式29〕
Q=S(t)・δφ/F …………………(29)
但)S(t):測定流体の温度に関連した補正係数
と表され、この式(29)に計測した位相角δφと駆動周波数Fを代入することによって質量流量Qを計算することができる。
このようにして求めた質量流量Qは、適切なスケーリングや単位換算が行われ、アナログ出力、パルス出力、シリアル通信など後段の処理を追加することによって様々な形態で外部に出力することができる。
【0137】
《周波数変換を用いた位相計測方法の特長》
本発明に係る位相計測システムの特徴は、レフトピックオフ(左速度センサ)7によって検出され、ローパスフィルタ30によって取り出された低い周波数の左速度信号(出口側速度信号)をA/Dコンバータ31によってデジタル信号に変換され出力され、周波数変換部110に入力される入力信号の周波数θとは無関係なサンプリング周期で信号をサンプリングできるので、非常に構成が簡単で、さらにフィルタのテーブルを必要とせず、さらに演算誤差が少ない非常に高速な演算が可能となる。
【0138】
また、本発明に係る位相計測システムによると、レフトピックオフ(左速度センサ)7によって検出され、ローパスフィルタ30によって取り出された低い周波数の左速度信号(出口側速度信号)をA/Dコンバータ31によってデジタル信号に変換され出力され、周波数変換部110に入力される入力信号に急激な周波数変化が生じても、周波数変換のフィードバックループによって、応答良く追従することができ、周波数変換後の周波数を直接計測し、位相計測を行うため、周波数変換に伴う周波数変換誤差が最小限に抑えら、非常に高安定性で正確な位相計測に適している。
そして位相計測だけでなく同時に周波数変換後の周波数と発信器120の発信周波数より入力信号の周波数を求めることができる。
ここで求められた周波数は、高速なフィードバックループより応答性の高い極めて安定な周波数となる。
【0139】
さらに、本発明に係る位相計測システムによると、周波数変換部110に入力される入力信号の入力周波数による位相計測の帯域制限が殆ど無いため、さまざまな駆動周波数のセンサと結合することが可能となり、さらに入力周波数によって演算精度が影響されないため、常に高精度な位相計測が可能となる。
【実施例3】
【0140】
測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブからなる測定チューブ2,3を駆動装置によって加振器6を作動させる。この一本、若しくは一対のフローチューブからなる測定チューブ2,3を交番駆動して、このフローチューブを振動させる。そして、レフトピックオフ(LPO)7とライトピックオフ(RPO)8とによって構成される振動検出センサである一対の速度センサ若しくは加速度センサによって、一本、若しくは一対のフローチューブからなる測定チューブ2,3に作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計が構成されている。
【0141】
このコリオリ流量計に、可変調な周波数信号を発信出力する発信器120を設ける。
さらに、一対の振動検出センサ(レフトピックオフ7,ライトピックオフ8)の内、一方の速度センサ(例えば、レフトピックオフ7から入力される入力信号(出口側速度信号))を第1のA/Dコンバータ31によってデジタル信号に変換する。そして、この入力信号周波数θを、発信器120から出力される出力周波数θXnを用いて、特定した一定周波数信号に周波数シフトして所望の周波数帯域に移動する第1の周波数変換部110を設ける。
【0142】
一対の振動検出センサ(レフトピックオフ7,ライトピックオフ8)の内、他方の速度センサ(例えば、ライトピックオフ8から入力される入力信号(入口側速度信号))を第2のA/Dコンバータ35によってデジタル信号に変換された入力信号周波数θを、発信器120から出力される出力周波数θXnを用いて、特定した一定周波数信号に周波数シフトして所望の周波数帯域に移動する第2の周波数変換部140を設ける。
【0143】
第1の周波数変換部110から出力される一定の周波数信号に変換された第1の周波数信号の周波数を計測し、この計測した第1の周波数信号の周波数値を発信器120に出力して、周波数変換部110において周波数変換を行った後の周波数が、常に一定周波数となるように出力周波数をコントロールする周波数計測部160を設ける。
さらに、第1の周波数変換部110から一定の周波数信号に変換された第1の周波数信号と、第2の周波数変換部140から出力される一定の周波数信号に変換された第2の周波数信号との位相差の計測を行う位相差計測部130を設ける。
【0144】
そして、第1の周波数変換部110から出力される一定の周波数信号に変換された第1の周波数信号と、第2の周波数変換部140から出力される一定の周波数信号に変換された第2の周波数信号との位相差を得る信号処理装置100を設けてコリオリ流量計を構成する。
【符号の説明】
【0145】
1………………………コリオリ流量計
2,3…………………測定チューブ
4………………………検出器
5………………………変換器
6………………………加振器
7………………………左速度センサ
8………………………右速度センサ
9………………………温度センサ
10……………………駆動制御部
11……………………位相計測部
12……………………温度計測部
30,34……………ローパスフィルタ
31,35……………A/Dコンバータ
70……………………振動速度センサ
80……………………振動速度信号演算器
85……………………周波数変換部
90……………………発信器
95……………………位相差計測器
100…………………信号処理装置
110…………………周波数変換部
111…………………掛け算器
112…………………ローパスフィルタ
120…………………発信器
130…………………位相差計測器
140…………………周波数変換部
150…………………クロック
160…………………周波数計測部
161…………………掛け算器
162…………………ローパスフィルタ
163…………………周波数計測用発信器
【技術分野】
【0001】
本発明は、流管に作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより被計測流体の質量流量及び/又は密度を得るコリオリ流量計に関する。
【背景技術】
【0002】
未知の流体の密度を測定するために、コリオリ流量計を用いることが知られている。
コリオリ流量計は、被測定流体の流通する流管の両端を支持し、その支持点回りに流管の流れ方向と垂直な方向に振動を加えたときに、流管(以下、振動が加えられるべき流管をフローチューブという)に作用するコリオリの力が質量流量に比例することを利用して質量流量を測定するものである。
一方、振動式密度計は、流体が流れる流管(以下、振動が加えられるべき流管をフローチューブという)の共振周波数が密度の変化によって変化することを利用して、被測定流体の密度を測定するものである。
このような振動式密度計は、その主要構成が、コリオリ流量計と共通しているために、被測定流体の質量流量を測定するためのコリオリ流量計を用いて構成して、質量流量と同時に密度を計測することが従来より行われている。
したがって、フローチューブが共振振動する周期或いは周波数を測定すること
によって、流体の密度を計測することが可能となる。このフローチューブの形状は直管式と湾曲管式とに大別されている。
【0003】
湾曲管式のフローチューブを用いる場合は、被測定流体が流れるフローチューブを両端で支持し、支持されたフローチューブの中央部を支持線に対し、直角な方向に交番駆動したとき、フローチューブの両端支持部と中央部との間の対称位置に質量流量を測定するものである。
フローチューブの交番駆動の周波数をフローチューブの固有の振動数と等しくすると、被測定流体の密度に応じた一定の駆動周波数が得られ、小さい駆動エネルギで駆動することが可能となる。そこで、フローチューブを固有振動数で駆動するのが一般的となっている。
【0004】
このような湾曲管式のフローチューブを用いて密度の測定を行う場合、フローチューブを駆動するための駆動手段としては、コイルとマグネットの組み合わせで用いられることが一般的になっている。そのコイルとマグネットの取り付けに関しては、フローチューブの振動方向に対してオフセットしてない位置に取り付けることが、コイルとマグネットの位置関係のズレを最小にする上で好ましい。そこで、並列二本のフローチューブを備える湾曲管式のコリオリ流量計のような並列二本のフローチューブにあっては、コイルとマグネットとを挟み込む状態に取り付けられている。そのため、相対する二本のフローチューブの距離が少なくともコイルとマグネットとを挟み込む分だけ離れるような設計がなされている。
【0005】
二本のフローチューブがそれぞれ平行する面内に存在するコリオリ流量計であって、口径が大きいフローチューブを用いたり、剛性が高いフローチューブを用いた場合には、駆動手段のパワーを高める必要があることから、大きな駆動手段を二本のフローチューブの間に挟み込まなければならない。そのため、フローチューブの根元である固定端部においても、そのフローチューブ同士の距離が必然的に広くなるように設計されている。
【0006】
一般的に知られているU字管の測定チューブを備えるコリオリ流量計1は、図13に示す如く、2本のU字管状の測定チューブ2,3の検出器4と、変換器5とを有して構成されている。
測定チューブ2,3の検出器4には、測定チューブ2,3を共振振動させる加振器6と、該加振器6によって振動したときに測定チューブ2,3の左側に生じる振動速度を検出する左速度センサ7と、該加振器6によって振動したときに測定チューブ2,3の右側に生じる振動速度を検出する右速度センサ8と、振動速度検出時の測定チューブ2,3内を流れる被測定流体の温度を検出する温度センサ9とを備えている。これら加振器6と、左速度センサ7と、右速度センサ8と、温度センサ9は、それぞれ変換器5に接続されている。
【0007】
このコリオリ流量計1の測定チューブ2,3内に流れる被測定流体は、測定チューブ2,3の右側(右速度センサ8が設置されている側)から左側(左速度センサ7が設置されている側)に流れるようになっている。
したがって、右速度センサ8によって検出される速度信号は、測定チューブ2,3に流入する被測定流体の入口側速度信号となる。また、左速度センサ7によって検出される速度信号は、測定チューブ2,3から流出する被測定流体の出口側速度信号となる。
【0008】
この変換器5は、駆動制御部10と、位相計測部11と、温度計測部12とによって構成されている。
変換器5は、図14に示す如きブロック構成を有している。
すなわち、変換器5は、入出力ポート15を有している。この入出力ポート15には、駆動制御部10を構成する駆動信号出力端子16が設けられている。駆動制御部10は、測定チューブ2,3に取り付けられた加振器6に、所定のモードの信号を駆動信号出力端子16から出力し、測定チューブ2,3が共振振動させている。
なお、振動速度を検出する左速度センサ7、右速度センサ8は、各々加速度センサであっても、もちろんよい。
【0009】
この駆動信号出力端子16には、増幅器17を介して、駆動回路18が接続されている。この駆動回路18においては、測定チューブ2,3を共振振動させる駆動信号を生成し、該駆動信号を増幅器17に出力する。この増幅器においては、入力した駆動信号を増幅して、駆動信号出力端子16に出力する。この駆動信号出力端子16においては、増幅器17から出力されてくる駆動信号を加振器6に出力する。
【0010】
また、入出力ポート15には、加振器6によって振動したときに測定チューブ2,3の左側に生じる振動速度の検出信号を入力する左速度信号入力端子19が設けられており、この左速度信号入力端子19は、位相計測部11を構成している。
また、入出力ポート15には、加振器6によって振動したときに測定チューブ2,3の右側に生じる振動速度の検出信号を入力する右速度信号入力端子20が設けられており、この右速度信号入力端子20は、位相計測部11を構成している。
【0011】
位相計測部11は、測定チューブ2,3に取り付けられた加振器6に、所定のモードの信号を駆動信号出力端子16から出力して、加振器6によって測定チューブ2,3を振動したときの一対の速度センサの振動信号をA/D変換しデジタル変換処理をした後、変換された信号の位相差を求めている。
左速度信号入力端子19には、増幅器21の入力端子が接続されており、この増幅器21の出力端子には、A/D変換器22が接続されている。このA/D変換器22においては、左速度信号入力端子19から出力される振動信号を増幅器21で増幅したアナログ信号をデジタル値に変換している。
A/D変換器22には、演算器23が接続されている。
【0012】
また、右速度信号入力端子20には、増幅器24の入力端子が接続されており、この増幅器24の出力端子には、A/D変換器25が接続されている。このA/D変換器25においては、右速度信号入力端子20から出力される振動信号を増幅器24で増幅したアナログ信号をデジタル値に変換している。
そして、A/D変換器25の出力されるデジタル信号は、演算器23に入力される。
【0013】
さらに、入出力ポート15には、温度センサ9からの検出値を入力する温度計測部11を構成する温度信号入力端子26が設けられている。温度計測部11は、測定チューブ2,3内に設けられ測定チューブ2,3内の温度を検出する温度センサ9による検出温度によってチューブ温度の補償を行っている。
この温度センサ9には、一般に抵抗型温度センサが用いられており、抵抗値を計測することによって温度を算出している。
温度信号入力端子26には、温度計測回路27が接続されており、この温度計測回路27によって温度センサ9から出力される抵抗値に基づいて測定チューブ2,3内の温度を算出している。この温度計測回路27において算出した測定チューブ2,3内の温度は、演算器23に入力されるようになっている。
【0014】
このようなコリオリ流量計1による位相計測方法は、測定チューブ2,3に取り付けられた加振器6から、測定チューブ2,3に1次モードで振動が与えられ、この振動が与えられた状態で、測定チューブ2,3内に被測定流体が流れると、測定チューブ2,3に位相モードが生成される。
したがって、コリオリ流量計1の右速度センサ8からの信号(入口側速度信号)と左速度センサ7からの信号(出口側速度信号)は、この2つの信号が重畳された形で出力される。この2つの信号が重畳された形で出力される信号は、流量信号だけでなく不要なノイズ成分を多く含んでおり、さらに計測流体の密度変化などによっても振動数が変化してしまう。
【0015】
そのために、左速度センサ7と右速度センサ8からの信号の内、不要な信号を取り除く必要がある。しかしながら、左速度センサ7と右速度センサ8からの信号の内、不要な信号を取り除き、位相を計算することは非常に難しい。
さらに、コリオリ流量計1は、非常に高精度な計測と高速な応答性を要求されることがしばしばある。この要求を満足するためには、非常に複雑な演算と高い処理能力をもった演算器を必要とし、コリオリ流量計そのものが非常に高価なものになっている。
このようなことから、コリオリ流量計には、常に計測周波数に合わせた最適なフィルタと高速な演算方法を併せ持った位相差計測方法とフローチューブの共振周波数計測の確立が必要とされている。
【0016】
従来の流量を計算するための位相差計測方法において、ノイズを除去するためのフィルタ処理方法としては、アナログフィルタを用いた方法と、デジタルフィルタを用いた方法とがある。
アナログフィルタを用いた方法は、比較的安価に構成できる(例えば、特許文献1、特許文献2参照)。しかし、この特許文献1、特許文献2においてフィルタの能力を上げることには限界があり、コリオリ流量計のフィルタとしては、十分ではないという問題点がある。
【0017】
近年、デジタル信号処理を用いたコリオリ流量計が数多く開発されており、
従来の流量を計算するための位相差計測方法において、ノイズを除去するためのフィルタ処理方法としてデジタルフィルタを用いた方法が開発されている。
デジタル信号処理を用いたコリオリ流量計のタイプとしては、従来、フーリエ変換を用いて位相を計測する方法(例えば、特許文献3参照)、ノッチフィルタ、バンドパスフィルタなどのフィルタテーブルを持つことによって、入力周波数に併せた最適なテーブルを選択し、位相を計測する方法(例えば、特許文献4、特許文献5参照)などがある。
【0018】
《フーリエ変換を用いた位相計測方法》
フーリエ変換を用いた位相計測方法による変換器は、図15に示す如きブロック構成を用いて行われる。
図15において、左速度センサ7によって検出される加振器6によって振動したときに測定チューブ2,3の左側に生じる振動速度の検出信号(出口側速度信号)を入力する入出力ポート15に設けられている左速度信号入力端子19には、ローパスフィルタ30が接続されている。このローパスフィルタ30は、加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3の左側に生じる振動速度を検出する左速度センサ7から出力される左速度信号(出口側速度信号)を周波数フィルタを通して、低い周波数の左速度信号(出口側速度信号)のみを取り出す回路である。
【0019】
このローパスフィルタ30には、A/Dコンバータ31が接続されている。このA/Dコンバータ31は、ローパスフィルタ30から出力されてくるアナログ信号である左速度信号をデジタル信号に変換するものである。このA/Dコンバータ31においてデジタル信号に変換された左速度信号は、位相差計測器32に入力される。
また、このA/Dコンバータ31には、タイミング発生器33が接続されている。このタイミング発生器33は、入力周波数のM倍(Mは自然数)のサンプリングのタイミングを生成するものである。
【0020】
一方、右速度センサ8によって検出される加振器6によって振動したときに測定チューブ2,3の右側に生じる振動速度の検出信号(入口側速度信号)を入力する入出力ポート15に設けられている右速度信号入力端子20には、ローパスフィルタ34が接続されている。このローパスフィルタ34は、加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3の右側に生じる振動速度を検出する右速度センサ8から出力される右速度信号(入口側速度信号)を周波数フィルタを通して、低い周波数の右速度信号(入口側速度信号)のみを取り出す回路である。
【0021】
このローパスフィルタ34には、A/Dコンバータ35が接続されている。このA/Dコンバータ35は、ローパスフィルタ34から出力されてくるアナログ信号である右速度信号をデジタル信号に変換するものである。このA/Dコンバータ35においてデジタル信号に変換された右速度信号は、位相差計測器32に入力される。
また、このA/Dコンバータ35には、タイミング発生器33が接続されている。このタイミング発生器33は、入力周波数のM倍(Mは自然数)のサンプリングのタイミングを生成するものである。
【0022】
また、右速度センサ8によって検出される加振器6によって振動したときに測定チューブ2,3の右側に生じる振動速度の検出信号(入口側速度信号)を入力する入出力ポート15に設けられている右速度信号入力端子20には、周波数計測器36が接続されている。この周波数計測器36は、右速度センサ8によって検出される加振器6によって振動したときに測定チューブ2,3の右側に生じる振動速度の検出信号(入口側速度信号)の周波数を計測するものである。
この周波数計測器36には、タイミング発生器33が接続されている。この周波数計測器36において計測された周波数は、タイミング発生器33に出力され、タイミング発生器33において入力周波数のM倍(Mは自然数)のサンプリングのタイミングが生成され、A/Dコンバータ31,35に出力される。
この位相差計測器32と、タイミング発生器33と、周波数計測器36とによって位相計測演算器40が構成されている。
【0023】
図15に示すように構成されるフーリエ変換を用いた位相計測方法においては、右速度センサ8からの入力信号(入口側速度信号)が、まず、周波数計測器36に入力され周波数が計測される。この周波数計測器36において計測された周波数は、タイミング発生器33に入力され、このタイミング発生器33においては、入力周波数のM倍(Mは自然数)のサンプリングのタイミングが生成され、A/Dコンバータ31,35に入力される。
また、A/Dコンバータ31においてデジタル信号に変換された測定チューブ2,3の左側に生じる振動速度の検出信号(出口側速度信号)と、A/Dコンバータ35においてデジタル信号に変換された測定チューブ2,3の右側に生じる振動速度の検出信号(入口側速度信号)は、位相差計測器32に入力される。そして、この位相差計測器32において、内蔵されるディスクリートフーリエ変換器でフーリエ変換され、その変換された信号の実数成分と虚数成分との比から位相差が演算される。
【0024】
《デジタルフィルタを用いた位相計測方法》
デジタルフィルタを用いた位相計測方法における変換器について、図16,図17に示されるブロック構成図を用いて説明する。
デジタルフィルタには、ノッチフィルタやバンドパスフィルタなどの周波数選択手段があり、このノッチフィルタやバンドパスフィルタなどの周波数選択手段を用い入力信号のS/N比を向上させるものである。
図16には、デジタルフィルタとしてノッチフィルタを用いた変換器のブロック構成が示されている。
図16に図示の入出力ポート15、左速度信号入力端子19、右速度信号入力端子20、ローパスフィルタ30,34、A/Dコンバータ31,35は、図15に図示の入出力ポート15、左速度信号入力端子19、右速度信号入力端子20、ローパスフィルタ30,34、A/Dコンバータ31,35と同一の構成を有するものである。
【0025】
図16において、A/Dコンバータ31には、ノッチフィルタ51が接続されている。このノッチフィルタ51は、A/Dコンバータ31においてデジタル信号に変換された左速度信号を基に周波数を選択し、入力信号のS/N比を向上して出力するものである。
このノッチフィルタ51には、位相計測器52が接続されており、この位相計測器52は、ノッチフィルタ51によってS/N比を向上させた後のデジタル信号に変換された左速度信号の位相を計測するものである。
また、ノッチフィルタ51には、周波数計測器53が接続されている。この周波数計測器53は、ノッチフィルタ51によってS/N比を向上させた後のデジタル信号に変換された左速度信号の周波数を計測するものである。
そして、この周波数計測器53において計測された周波数は、ノッチフィルタ51に入力される。
【0026】
また、A/Dコンバータ35には、ノッチフィルタ54が接続されている。このノッチフィルタ54は、A/Dコンバータ31においてデジタル信号に変換された左速度信号を基に周波数を選択し、入力信号のS/N比を向上して出力するものである。
このノッチフィルタ54には、位相計測器52が接続されており、この位相計測器52は、ノッチフィルタ54によってS/N比を向上させた後のデジタル信号に変換された右速度信号の位相を計測するものである。
また、ノッチフィルタ54には、周波数計測器53において計測された周波数が、入力されるようになっている。
【0027】
図16において、クロック55は、同期を取るためのもので、A/Dコンバータ31,35に入力され、A/Dコンバータ31とA/Dコンバータ35の同期を取っている。
このノッチフィルタ51,54と、位相差計測器52と、周波数計測器53と、クロック55とによって位相計測演算器50が構成されている。
【0028】
図17には、デジタルフィルタとしてバンドパスフィルタ(BPF)を用いた変換器のブロック構成が示されている。
図17に図示の入出力ポート15、左速度信号入力端子19、右速度信号入力端子20、ローパスフィルタ30,34、A/Dコンバータ31,35は、図16に図示の入出力ポート15、左速度信号入力端子19、右速度信号入力端子20、ローパスフィルタ30,34、A/Dコンバータ31,35と同一の構成を有するものである。
【0029】
図17において、A/Dコンバータ31には、バンドパスフィルタ(BPF)61が接続されている。このバンドパスフィルタ61は、A/Dコンバータ31においてデジタル信号に変換された加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3の左側に生じる振動速度を検出する左速度センサ7から出力される左速度信号(出口側速度信号)を、周波数フィルタを通して、設定された周波数の左速度信号(出口側速度信号)のみを取り出す回路である。
このバンドパスフィルタ61には、位相計測器62が接続されており、この位相計測器62は、バンドパスフィルタ61によってS/N比を向上させた後のデジタル信号に変換された左速度信号の位相を計測するものである。
【0030】
また、バンドパスフィルタ61には、周波数計測器63が接続されている。この周波数計測器63は、A/Dコンバータ31によってデジタル信号に変換され、バンドパスフィルタ61によってS/N比を向上させた後の左速度信号の周波数を計測するものである。
そして、この周波数計測器63において計測された周波数は、バンドパスフィルタ61に入力される。
【0031】
また、A/Dコンバータ35には、バンドパスフィルタ64が接続されている。このバンドパスフィルタ64は、A/Dコンバータ35においてデジタル信号に変換された加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3の右側に生じる振動速度を検出する右速度センサ8から出力される右速度信号(入口側速度信号)を、周波数フィルタを通して、設定された周波数の右速度信号(入口側速度信号)のみを取り出す回路である。
このバンドパスフィルタ64には、位相計測器62が接続されており、この位相計測器62は、バンドパスフィルタ64によってS/N比を向上させた後のデジタル信号に変換された左速度信号の位相を計測するものである。
【0032】
また、バンドパスフィルタ64には、周波数計測器63が接続されている。そして、この周波数計測器63において計測された周波数は、バンドパスフィルタ64に入力される。
図17において、クロック65は、同期を取るためのもので、クロック65からのクロック信号は、A/Dコンバータ31,35に入力され、A/Dコンバータ31とA/Dコンバータ35の同期を取っている。
このバンドパスフィルタ61,64と、位相計測器62と、周波数計測器63と、クロック65とによって位相計測演算器60が構成されている。
【先行技術文献】
【特許文献】
【0033】
【特許文献1】特開平2−66410号公報
【特許文献2】特表平10−503017号公報
【特許文献3】特許第2799243号公報
【特許文献4】特許第2930430号公報
【特許文献5】特許第3219122号公報
【発明の概要】
【発明が解決しようとする課題】
【0034】
特許文献3に示すようなフーリエ変換を用いた位相計測方法にあっては、入力される振動速度の検出信号の入力周波数が一定である場合、周波数の選択においてフーリエ変換を用いるために、非常に周波数選択性の高い位相計測方法を行うことができる。
しかし、この特許文献3に示すようなフーリエ変換を使う方法にあっては、入力される振動速度の検出信号の入力周波数が、密度や温度などによって変化した場合、変換方法やサンプリングレートを変えなければならないために、演算周期や演算方法が変わり、測定値が変動し不安定になってしまう。
【0035】
さらに、特許文献3に示すようなフーリエ変換を使う方法にあっては、入力される振動速度の検出信号の入力周波数が、密度や温度などによって変化した場合、サンプリングレートを入力される振動速度信号の入力周波数に正確に同期させなければならないために、設計が非常に複雑なものになる。
このために被測定流体の温度や、気泡などが流体に混ざり密度が急激に変化した場合、極端に計測精度が落ちてしまうという問題点を有している。
加えて、特許文献3に示すようなフーリエ変換を使う方法にあっては、フーリエ変換を行うため、非常に演算処理が多くなってしまうという問題点を有している。
【0036】
特許文献4、特許文献5に示すようなノッチフィルタ、バンドパスフィルタなどのフィルタテーブルを持つことによって、入力周波数に併せた最適なテーブルを選択し、位相を計測する方法にあっては、サンプリングレートを固定することによって設計を単純化することができる。
しかし、特許文献4、特許文献5に示すようなデジタルフィルタを用いた位相計測方法も特許文献3に示すようなフーリエ変換を使う方法と同様に、入力周波数の変化に対して非常に多くのフィルタテーブルを持つこととなり、演算器のメモリの消費が大きくなってしまうという問題点を有している。
【0037】
また、特許文献4、特許文献5に示すようなデジタルフィルタを用いた位相計測方法にあっては、入力周波数が急激に変化した場合に最適なフィルタを選択することが困難になってしまうという問題点を有している。
さらに、特許文献4、特許文献5に示すようなデジタルフィルタを用いた位相計測方法にあっては、周波数の選択能力を上げるために、非常に多くの演算をしなければならないという問題点を有している。
【0038】
この特許文献4、特許文献5に示すようなデジタルフィルタを用いた位相計測方法にあっては、以下に示す如き問題を有している。
(1)入力周波数の変化に対して精度良く追従することができない。すなわち、被測定流体の密度が急速に変化する気泡混入時での計測などを実現することが非常に困難である。
(2)周波数の選択能力を向上させるためには、非常に多くの演算をしなければならない。このため高速な応答性を実現させることが困難であり、短時間でのバッチ処理などに不向きである。
(3)演算器メモリの消費が大きく、設計が複雑になってしまう。したがって、回路構成や設計が複雑になり、コスト的に非常にデメリットになる。
【0039】
以上総合すると、従来のデジタルフィルタ処理による位相計測方法にあっては、いずれも測定チューブ2,3のチューブ振動数以外の帯域のノイズを取り除くため、常に測定チューブ2,3のチューブ周波数に追従するようにフィルタテーブルの切り替えや演算方法の変更、さらには、サンプリングレートの変更などを行う必要があるために、非常に複雑且つ高速性に欠ける演算を行わなければならないという問題点を有していた。
このため、加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3の右側に生じる振動速度を検出する右速度センサ8,測定チューブ2,3の左側に生じる振動速度を検出する左速度センサ7によって検出される振動速度信号の入力周波数が変動するたびに演算誤差を生じ易く、非常に計測精度が悪いものであるという問題点を有していた。
【0040】
本発明の目的は、被測定流体の温度が変化したり、被測定流体に気泡が混入したり、被測定流体が気体から液体に急速に変化した場合であっても、常に一定の精度で計測することができ、高いフィルタリング能力をもった位相計測、及び周波数計測を実現し、極めて少ない演算処理量で行うことのできる信号処理方法、信号処理装置、及びコリオリ流量計を提供することにある。
【課題を解決するための手段】
【0041】
上記課題を解決するためなされた請求項1に記載の信号処理方法は、測定用の流管を構成する少なくとも一本、又は一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである2つの速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
前記速度センサ若しくは加速度センサから検出される前記フローチューブに作用するコリオリの力に比例した振動周波数の入力信号をA/D変換して得る2つの流量信号の各々について任意の発振周波数に基づいて合成して周波数変換し,
少なくとも一方のセンサの合成波形の周波数を計測し,
前記計測した周波数に基づいて制御信号を発信し,
前記合成周波数信号の合成した合成成分の和分または差分の成分の周波数が常に一定となるように制御し,
前記制御信号よりフローチューブの共振周波数を求め、被計測流体の密度を算出し、
前記制御された各々の変換合成周波数の和分または差分の信号から位相を計測することを特徴としている。
【0042】
上記課題を解決するためなされた請求項2に記載の信号処理方法は、請求項1に記載の信号処理方法の前記任意の発振周波数に基づく合成周波数変換を,
前記一方のセンサからの入力信号SINθ1と、前記発信する制御信号cosθ2とを掛け算し,
前記掛け算して出力される出力信号を周波数フィルタを通して、低い周波数の信号のみ取り出すようにしたものである。
【0043】
上記課題を解決するためなされた請求項3に記載の信号処理方法は、請求項1に記載の信号処理方法の前記任意の発振周波数に基づく合成周波数変換を,
前記一方のセンサからの入力信号SINθ1と、前記発信する制御信号cosθ2とを掛け算し,
前記掛け算して出力される出力信号を周波数フィルタを通して、高い周波数の信号のみ取り出すようにしたものである。
【0044】
上記課題を解決するためなされた請求項4に記載の信号処理方法は、請求項1に記載の信号処理方法の前記速度センサ若しくは加速度センサから検出される前記フローチューブに作用するコリオリの力に比例した振動周波数の入力信号は、
前記A/D変換においてサンプリングしてデジタル信号化が行われ,
前記発信する制御信号に基づいて合成周波数変換して得られる各々の変換合成周波数信号は,
合成した合成成分の和分または差分の成分の周波数が前記A/D変換時のサンプリング周波数の1/4になるように制御するようにしたものである。
【0045】
上記課題を解決するためなされた請求項5に記載の信号処理装置は、測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器90と,
前記速度センサ若しくは加速度センサによって検出される入力信号からの入力周波数と、前記発信器90の出力周波数FXを加算(又は減算)して周波数変換し、該周波数変換後の周波数値が常に一定になるように周波数シフトする周波数変換器85と,
前記周波数変換器85から出力される変換された周波数信号の位相差の計測を行う位相差計測部95と,
によって構成したことを特徴としている。
【0046】
上記課題を解決するためなされた請求項6に記載の信号処理装置は、測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該少なくとも一本、若しくは一対のフローチューブを振動させて、振動検出センサである一対の速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器120と,
前記一対の振動検出センサの一方のセンサを第1のA/Dコンバータ31によってデジタル信号に変換された該入力信号周波数θと、前記発信器120から出力される出力周波数θXnとを加算(または減算)して該周波数変換後の周波数値が常に一定になるように周波数変換する第1の周波数変換部110と,
前記一対の振動検出センサの他方のセンサを第2のA/Dコンバータ35によってデジタル信号に変換された該入力信号周波数θと、前記発信器120から出力される出力周波数θXnとを加算(または減算)して該周波数変換後の周波数値が常に一定になるように周波数変換する第2の周波数変換部140と,
によって構成したことを特徴としている。
【0047】
上記課題を解決するためなされた請求項7に記載の信号処理装置は、測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである一対の振動検出センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器120と,
前記一対の振動検出センサの一方の速度センサを第1のA/Dコンバータ31によってデジタル信号に変換された該入力信号周波数θを、前記発信器120から出力される出力周波数θXnを用いて、特定した一定周波数信号に周波数シフトして所望の周波数帯域に移動する第1の周波数変換部110と,
前記一対の振動検出センサの他方の速度センサを第2のA/Dコンバータ35によってデジタル信号に変換された該入力信号周波数θを、前記発信器120から出力される出力周波数θXnを用いて、常に一定の一定周波数信号に周波数シフトして所望の周波数帯域に移動する第2の周波数変換部140と,
前記第1の周波数変換部110から出力される特定した一定周波数信号に変換された第1の周波数信号の周波数を計測し、該計測した第1の周波数信号の周波数値を前記発信器120に出力して、前記周波数変換部110において周波数変換を行った後の周波数が、前記第1のA/Dコンバータ31によってデジタル信号に変換されて入力される一対の振動検出センサの一方の速度センサ信号の入力周波数を所望の周波数になるように第1及び第2の周波数変換部の出力周波数をコントロールする周波数計測部160と,
によって構成したことを特徴としている。
【0048】
上記課題を解決するためなされた請求項8に記載の信号処理装置は、請求項5,6又は7に記載の信号処理装置の前記周波数変換部110を,
前記発信器120からの参照信号cosθ2と、前記第1のA/Dコンバータ31からの入力信号SINθ1を掛け算する掛け算器111と,
前記掛け算器111において掛け算して出力されてくる出力信号を周波数フィルタを通して、低い周波数の信号のみ取り出すローパスフィルタ112と,
によって構成したことを特徴としている。
【0049】
上記課題を解決するためなされた請求項9に記載の信号処理装置は、請求項5,6又は7に記載の信号処理装置の前記周波数変換部110を,
前記発信器120からの参照信号cosθ2と、前記第1のA/Dコンバータ31からの入力信号SINθ1を掛け算する掛け算器111と,
前記掛け算器111において掛け算して出力されてくる出力信号を周波数フィルタを通して、高い周波数の信号のみ取り出すハイパスフィルタ112と,
によって構成したことを特徴としている。
【0050】
上記課題を解決するためなされた請求項10に記載の信号処理装置は、請求項7,8又は9に記載の信号処理装置の前記周波数計測部160を,
前記第1の周波数変換部110に接続される掛け算器161と、該掛け算器161に接続されるローパスフィルタ162と、該ローパスフィルタ162に接続され、該ローパスフィルタ162からの出力信号を入力する周波数計測用発信器163とからなり,
前記掛け算器161は、周波数変換部110から出力される出力信号sin(θ+θXn)と、周波数計測用発信器163から出力される出力信号cosδの位相を比較し、その差信号と和信号として後段のローパスフィルタ162に出力するもので,
前記ローパスフィルタ162は、前記掛け算器161から出力される出力信号を周波数フィルタを通して、低い周波数の信号のみ取り出す回路で,
該ローパスフィルタ162から出力される低い周波数の信号を基に基本出力波形の位相量Vが生成され,該位相量Vは前記周波数計測用発信器163によって常に、
V=0
なる条件を満たす
ことを特徴としている。
【0051】
上記課題を解決するためなされた請求項11に記載の信号処理装置は、請求項7,8,9又は10に記載の信号処理装置の前記第1のA/Dコンバータ31と前記第2のA/Dコンバータ35の出力の同期を取るクロックを設け,
前記第1のA/Dコンバータ31から出力される一対の振動検出センサの一方のデジタル信号と、前記第2のA/Dコンバータ35から出力される一対の振動検出センサの他方のデジタル信号との同期を取るようにしたことを特徴としている。
【0052】
上記課題を解決するためなされた請求項12に記載の信号処理装置は、請求項7,8,9,10又は11に記載の信号処理装置の前記位相計測部の処理を,DFT(Discrete Fourier Transform:離散フーリエ変換)又は、FFT(Fast Fourier Transform:高速フーリエ変換)で構成したものである。
【0053】
上記課題を解決するためなされた請求項13に記載のコリオリ流量計は、測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである一対の速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器120と,
前記一対の振動検出センサの一方の速度センサを第1のA/Dコンバータ31によってデジタル信号に変換された該入力信号周波数θを、前記発信器120から出力される出力周波数θXnを用いて、特定した一定周波数信号に周波数シフトして所望の周波数帯域に移動する第1の周波数変換部110と,
前記一対の振動検出センサの他方の速度センサを第2のA/Dコンバータ35によってデジタル信号に変換された該入力信号周波数θを、前記発信器120から出力される出力周波数θXnを用いて、特定した一定周波数信号に周波数シフトして所望の周波数帯域に移動する第2の周波数変換部140と,
前記第1の周波数変換部110から出力される特定した一定周波数信号に変換された第1の周波数信号の周波数を計測し、該計測した第1の周波数信号の周波数値を前記発信器120に出力して、前記周波数変換部110において周波数変換を行った後の周波数が、前記第1のA/Dコンバータ31によってデジタル信号に変換されて入力される一対の振動検出センサの一方の速度センサ信号の入力周波数を所望の周波数になるように第1及び第2の周波数変換部の出力周波数をコントロールする周波数計測部160と,
によって構成したことを特徴としている。
【発明の効果】
【0054】
コリオリ式流量計のフローチューブには、たとえば湾曲管のものやストレート管などである。また測定管を駆動するモードにおいても1次や2次のモードなどさまざまなモードにおいて駆動されるタイプが存在する。
周知の如くフローチューブから得られる駆動周波数帯域は数十Hz〜数KHzに及ぶ、たとえばU字管を用いて1次のモードでフローチューブを振動させた場合、周波数は100Hz前後であり、またストレート形状のフローチューブを1次のモードで振動させた場合は、500Hz〜1000Hz程度が実現されている。
しかし、ひとつの流量計変換器に於いて、コリオリ流量計の位相、及び周波数計測を、数十Hz〜数KHzの周波数帯域で常に同様な処理を用いて位相計測を行うことは非常に困難で、数種のタイプに分けて設計する必要があった。
【0055】
本発明に係る信号処理方法によれば、同定のアルゴリズムに基づく有利な信号処理によって、上記の如き本質的な課題を払拭でき、かつ被測定流体の温度変化や、気泡混入、さらに被測定流体が気体から液体に急速に変化した場合であっても、常に安定した精度で位相、及び周波数計測を行うことができ、高い性能を提供できる。
【0056】
本発明に係る信号処理装置によれば、被測定流体の温度が変化したり、被測定流体に気泡が混入したり、被測定流体が気体から液体に急速に変化した場合であっても、常に安定した精度で計測することができ、位相、及び周波数計測を少ない演算量で行うことができる。
【0057】
本発明に係るコリオリ流量計によれば、被測定流体の温度が変化したり、被測定流体に気泡が混入したり、被測定流体が気体から液体に急速に変化した場合であっても、常に安定した精度で計測することができ、位相、及び周波数計測を少ない演算量で行うことができる。
【図面の簡単な説明】
【0058】
【図1】本発明に係る信号処理装置の原理を示すブロック図である。
【図2】図1に図示の信号処理装置の具体的構成を示すブロック図である。
【図3】図2に図示の信号処理装置のフィードバック制御の方法による具体的構成を示すブロック図である。
【図4】図3に図示のLPFからの出力信号を示す図である。
【図5】図3に図示のA/Dコンバータからの出力信号を示す図である。
【図6】図3に図示の発信器からの出力信号を示す図である。
【図7】図3に図示の周波数変換部の掛け算器における出力信号を示す図である。
【図8】図3に図示の周波数変換部からの出力信号を示す図である。
【図9】図3に図示の信号処理装置の具体的構成図のタイムチャートを示す図である。
【図10】図3に図示の信号処理装置の具体的構成図の動作フローチャートである。
【図11】図3に図示の信号処理装置の周波数変換部のブロック構成図である。
【図12】図3に図示の信号処理装置の周波数計測部のブロック構成図である。
【図13】本発明が適用される一般的なコリオリ流量計の構成図である。
【図14】図13に図示のコリオリ流量計の変換器のブロック構成図である。
【図15】図14に図示の変換器のフーリエ変換を用いた位相計測方法を示すブロック図である。
【図16】図14に図示の変換器のノッチフィルタを用いた位相計測方法を示すブロック図である。
【図17】図14に図示の変換器のバンドパスフィルタを用いた位相計測方法を示すブロック図である。
【発明を実施するための形態】
【0059】
本発明は、常に一定の精度で計測することができ、極めて少ない演算処理量で行うことができるという目的を、被測定流体の温度が変化したり、被測定流体に気泡が混入したり、被測定流体が気体から液体に急速に変化した場合においても、実現できるようにした。
【実施例1】
【0060】
以下、本発明を実施するための形態の実施例1について図1〜図9を用いて説明する。
図1は本発明に係る信号処理方法、およびその装置の原理図、図2は図1に図示の原理図の詳細回路図、図3は図2に図示の信号処理装置のフィードバック制御の方法による具体的構成を示すブロック図、図4は図3に図示のLPFからの出力信号を示す図、図5は図3に図示のA/Dコンバータからの出力信号を示す図、図6は図3に図示の発信器からの出力信号を示す図、図7は図3に図示の周波数変換部の掛け算器における出力信号を示す図、図8は図3に図示の周波数変換部からの出力信号を示す図、図9は図3に図示の信号処理装置の具体的構成図のタイムチャートを示す図である。
【0061】
図1において、加振器(例えば、電磁オシレータ)6によって測定チューブ2,3を振動したときに、測定チューブ2,3に生じる振動速度は、振動速度センサ(例えば、速度センサ又は加速度センサ)70によって検出され、この検出された振動速度は、振動速度信号演算器80において演算処理される。この振動速度センサ70は、図13における左速度センサ7と右速度センサ8に相当している。
【0062】
振動速度信号演算器80は、周波数変換部85と、発信器90と、位相差計測器95とによって構成される。
周波数変換部85は、振動速度センサ70によって検出される加振器6によって測定チューブ2,3を振動したときに測定チューブ2,3に生じる振動速度を周波数変換するものである。この周波数変換部85には、発信器90からの信号が入力されるようになっている。
そして、この周波数変換部85において周波数変換された信号は、周波数変換部85の後段に設けられている位相差計測器95に入力される。この位相差計測器95は、振動速度センサ70からの速度信号をA/D変換しデジタル変換処理をした後、その位相差を求めるものである。
【0063】
図1に図示の信号処理方法、およびその装置は、入力信号を周波数変換し、周波数変換後の周波数が一定になるようにコントロールし、周波数変換後に位相計測を行うことによって、入力信号の周波数が変化しても高速で、かつ常に一定な高精度な位相計測を行なうことができるフィルタ処理装置を実現している。
すなわち、図1に図示の信号処理方法、およびその装置80は、振動速度センサ70入力信号からの入力周波数FINと発信器90の出力周波数FXを周波数変換器85で掛け算し、その結果、両信号の位相差を加算(又は減算)し、周波数変換後の周波数が一定になるように発信器90をコントロールすることによって、位相計測部95に入力される周波数が常に一定となるように制御し、周波数変換後の信号から位相計測を行うものである。
【0064】
このように構成することにより、入力周波数に応じた多くのフィルタや、演算方法の変更など複雑な処理を一切行うことなく、常に一定で誤差のほとんどない高速な演算を行うことができる。
〔式1〕
Fc=FX+FIN (or Fc=FX−FIN) ……………(1)
この〔式1〕の演算式において、Fcは、周波数変換後の周波数を、FINは、入力周波数(測定用流管の振動周波数)を、FXは、発信器の発信周波数をそれぞれ示している。
【0065】
ここで、被計測流体の密度を得る方法について説明する。
密度の計測をするに当っては、測定チューブ2,3の振動周波数を計測する必要がある。したがって、周波数変換をする前の周波数値を求めればよいことになる。
図1に示される信号処理方法、及び信号処理装置においては、振動速度センサ7から出力される加振器6によって測定チューブ2,3を振動したときに測定チューブ2,3に生じる振動速度を周波数変換部85において周波数変換し、この周波数変換部85における周波数変換後の周波数が一定になるようにコントロールしている。
【0066】
この〔式1〕の演算式において、周波数変換後の周波数Fcは、常に一定になるように制御されるため既知の値である。
さらに、FXは、発信器90の発信周波数であり、この発信器90の発信周波数FXの値をコントロールすることによって周波数変換後の周波数Fcを一定にするためには、当然のことではあるが、発信器90の発信周波数FXは、既知の値である。この発信器90の発信周波数FXの値が既知の値でなければコントロールできない。
したがって、既知の値である周波数変換後の周波数Fcと発信器90の発信周波数FXを〔式1〕に代入すると、入力周波数FIN(測定用流管の振動周波数)を求めることができる。
フローチューブの振動周期Tと、流体密度ρの関係は、密度計測装置固有の定数(使用される装置固有の値を有している)をA,Bとすると、
〔式2〕
ρ=AT2+B …………………………(2)
で表せることが知られている。要するに、装置固有のA,Bを知ることができれば、フローチューブ振動周期Tを測定することにより、流体密度ρを求めることができる。 この処理は、リアルタイムで行われているため測定チューブ2,3管の被測定流体の密度を得ることができる。
なお、詳細な密度の演算式は、特願2001−34989号(特開2002−243613号)において明らかにしてある。
【0067】
図2には、図1に図示の信号処理装置の具体的構成が示されている。
図2において、レフトピックオフ(LPO)7(左速度センサ7に相当)には、ローパスフィルタ30が接続されている。すなわち、加振器6によって振動したときに測定チューブ2,3の左側に生じる振動速度の検出信号(出口側速度信号)をレフトピックオフ7が検出すると、この振動速度の検出信号(出口側速度信号)は、ローパスフィルタ30に入力される。
このローパスフィルタ30は、加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3の左側に生じる振動速度を検出する左速度センサ7から出力される左速度信号(出口側速度信号)を周波数フィルタを通して、低い周波数の左速度信号(出口側速度信号)のみを取り出す回路である。
【0068】
このローパスフィルタ30には、A/Dコンバータ31が接続されている。このA/Dコンバータ31は、ローパスフィルタ30から出力されてくるアナログ信号である左速度信号(出口側速度信号)をデジタル信号に変換するものである。このA/Dコンバータ31においてデジタル信号に変換された左速度信号(出口側速度信号)は、信号処理装置100に入力される。
また、この信号処理装置100は、A/Dコンバータ31に接続されている。この信号処理装置100は、入力信号(出口側速度信号)を後段の位相計測器で処理される所望な周波数に周波数変換し、周波数変換後に位相計測を行うことによって、入力周波数の帯域をシフトさせ、かつ安定的な位相計測が行えるようにするものである。
【0069】
一方、ライトピックオフ(RPO)8(右速度センサ8に相当)には、ローパスフィルタ34が接続されている。すなわち、加振器6によって振動したときに測定チューブ2,3の右側に生じる振動速度の検出信号(入口側速度信号)をライトピックオフ8が検出すると、この振動速度の検出信号(入口側速度信号)は、ローパスフィルタ34に入力される。
このローパスフィルタ34は、加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3の右側に生じる振動速度を検出する右速度センサ8から出力される右速度信号(入口側速度信号)を周波数フィルタを通して、低い周波数の右速度信号(入口側速度信号)のみを取り出す回路である。
【0070】
このローパスフィルタ34には、A/Dコンバータ35が接続されている。このA/Dコンバータ35は、ローパスフィルタ34から出力されてくるアナログ信号である右速度信号(入口側速度信号)をデジタル信号に変換するものである。 また、この信号処理装置100は、A/Dコンバータ35に接続されている。この信号処理装置100は、入力信号(入口側速度信号)を後段の位相計測器で処理される所望な周波数に周波数変換し、周波数変換後に位相計測を行うことによって、入力周波数の帯域をシフトさせ、かつ安定的な位相計測が行えるようにするものである。
【0071】
A/Dコンバータ31には、周波数変換部110が接続されている。この周波数変換部110は、A/Dコンバータ31から出力されて入力される左速度信号(出口側速度信号)のデジタル信号を後段の位相計測器で処理される所望な周波数に周波数変換するものである。
また、A/Dコンバータ35には、周波数変換部140が接続されている。この周波数変換部140は、A/Dコンバータ35から出力されて入力される右速度信号(入口側速度信号)のデジタル信号を前記同様、所望な周波数に周波数変換するものである。
【0072】
また、周波数変換部110には、発信器120からの信号が入力するように構成されている。この発信器120から出力される信号が周波数変換部110に入力されることによって、周波数変換部110においては、レフトピックオフ7から入力される入力信号(出口側速度信号)を発信器120から出力される信号によって周波数変換している。
この周波数変換部110において周波数変換された信号は、発信器120の出力信号によって所望の一定の周波数信号に変換されるようになっている。
【0073】
また、周波数変換部140にも、発信器120からの信号が入力するように構成されている。この発信器120から出力される信号が周波数変換部140に入力されることによって周波数変換部140においては、ライトピックオフ8から入力される入力信号(入口側速度信号)を発信器120から出力される信号によって周波数変換している。
この周波数変換部140において周波数変換された信号は、発信器120の出力信号によって所望の一定の周波数信号に変換されるようになっている。
【0074】
このように発信器120によってコントロールされると、この発信器120から出力される出力周波数によって、周波数変換部110同様、周波数変換部140においても、周波数変換を行った後の周波数が、A/Dコンバータ35から入力される右速度信号(入口側速度信号)は後段の位相計測器130で処理される所望な周波数に制御される。
【0075】
この位相差計測器130では、A/Dコンバータ31から出力され周波数変換部110に入力される左速度信号(出口側速度信号)の入力周波数と、A/Dコンバータ35から出力され周波数変換部140に入力される右速度信号(入口側速度信号)の入力周波数とが同時に周波数変換されて入力され、位相差計測が行われる。
このように構成することにより、本実施の形態によれば、入力周波数(左速度信号,右速度信号)を所望の周波数帯域に同時に変換することによって、入力周波数(左速度信号,右速度信号)が変わっても、常に位相計測処理周波数を一定化して、フィルタのテーブル数を大幅に減らし、また位相計測処理をより効果的に行うことができる。
本発明の効果として、入力周波数に応じた多くのフィルタや、演算方法の変更など複雑な処理を一切行うことなく、常に一定で誤差のほとんどない高速な演算を行うことが可能となることである。もちろん位相計測部の処理は、DFT(Discrete Fourier Transform:離散フーリエ変換)でも、FFT(Fast Fourier Transform:高速フーリエ変換)でも実現が可能である。
【0076】
A/Dコンバータ31とA/Dコンバータ35には、クロック150から、クロック信号が入力するようになっている。このクロック150は、A/Dコンバータ31から出力される左速度信号のデジタル信号と、A/Dコンバータ35から出力される右速度信号のデジタル信号の同期を計り、同時サンプリングを実現している。
この周波数変換部110と、発信器120と、位相差計測器130と、周波数変換部140と、クロック150とによって信号処理装置100が構成されている。
【0077】
このようにA/Dコンバータ31,35によってデジタル信号に変換されたそれぞれの入力信号(左速度信号,右速度信号)は、周波数変換部110,140において、発信器120からの出力信号を用いて周波数変換される。
【0078】
次に、図2に図示の信号処理装置100における位相差計測演算の具体的な演算方法について説明する。
コリオリ流量計1の加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3に設けられる振動速度センサ70(レフトピックオフ7,ライトピックオフ8)からの出力信号(左速度信号,右速度信号)を図2に図示の如く、LPO(レフトピックオフ7)、RPO(ライトピックオフ8)の入力信号として得る。
このとき、LPO、RPOの入力信号を定義すると、(δφ:LPOとRPO間の位相差とする)
〔式3〕
ライトピックオフ : sin(θ) ………………(3)
〔式4〕
レフトピックオフ : sin(θ+δφ) ………………(4)
となる。
【0079】
この2つの振動速度センサ(レフトピックオフ7,ライトピックオフ8)からの出力信号(左速度信号LPO,右速度信号RPO)は、コリオリ流量計1の変換器5の内部のローパスフィルタ30,34をそれぞれ通って、A/D変換器31,35によってアナログ値からデジタル値に変換され、信号処理装置100に送られる。
この信号処理装置100は、前述した如く、周波数変換部110と、発信器120と、位相差計測部130と,周波数変換部140の4つのブロックによって構成されており、レフトピックオフ7からの出力信号LPOと、ライトピックオフ8からの出力信号RPOの位相差を演算した後、振動速度センサから出力される周波数と、温度センサ9によって検出される温度のデータをもとに流量信号に変換する。
なお、温度計測については、図中において説明しない。
【0080】
この周波数変換部110から出力される変換周波数は、レフトピックオフ(左速度センサ)7によって検出され、ローパスフィルタ30によって取り出された低い周波数の左速度信号(出口側速度信号)がA/Dコンバータ31においてデジタル信号に変換され出力されてくる入力信号周波数θと、発信器120から出力される出力周波数θXnとを加算(または減算)して求められる。
このように、周波数変換部110から出力され位相計測部130に入力される入力信号周波数は、周波数変換部110において、発信器120から出力される出力周波数θXnを用いて、A/Dコンバータ31から出力されるデジタル信号の低い周波数の左速度信号(出口側速度信号)である入力信号周波数θを周波数シフトして別の周波数帯域に移動したものとなる。
【0081】
このように周波数変換部110において周波数シフトされ出力される信号と、同様に処理される周波数変換部140において周波数シフトされ出力される信号は、位相計測部130において位相計算が行われる。
【0082】
周波数変換部110から出力される周波数計測値(θ+θXn)の値は、
〔式5〕
θC=θ+θXn ………………(5)
と、最終的に任意に設定した位相計測周波数設定値θCとなるように制御する。
このように位相計測部130に入力される周波数計測値(θ+θXn)が常に一定周波数θCになるように発信器120をコントロールすることによって後段の位相計測の高速処理を可能にすることができる。
【0083】
本発明における周波数の制御方法は、式(5)の条件をすべて周波数変換部(110,140)の出力周波数がθcに等しくなる様に発信器120の周波数を変化させる方式、すなわちフィードバック制御の方法によって構成してある。
以下、本発明に係る信号処理方法、信号処理装置の実施の形態について説明する。
図3には、図2に図示の信号処理装置のフィードバック制御の方法による具体的構成が示されている。
図3に図示の信号処理装置100は、入力信号(出入口側速度信号)を所望の周波数に周波数変換し、周波数変換後に位相計測を行うことによって、入力周波数の帯域を気遣うことなしに、かつ安定的な位相計測が行えるようにするものである。
【0084】
図3において、A/Dコンバータ31には、周波数変換部110が接続されている。この周波数変換部110は、A/Dコンバータ31から出力されて入力される左速度信号(出口側速度信号)のデジタル信号を周波数変換するものである。
また、A/Dコンバータ35には、周波数変換部140が接続されている。この周波数変換部140は、A/Dコンバータ35から出力されて入力される右速度信号(入口側速度信号)のデジタル信号を周波数変換するものである。
【0085】
また、周波数変換部110には、発信器120からの信号が入力するように構成されている。この発信器120から出力される信号が周波数変換部110に入力されることによって、周波数変換部110においては、レフトピックオフ7から入力される入力信号(出口側速度信号)を発信器120から出力される信号によって周波数変換している。
この周波数変換部110において周波数変換された信号は、発信器120の出力信号によって一定の周波数信号に変換されるようになっている。
【0086】
また、周波数変換部140にも、発信器120からの信号が入力するように構成されている。この発信器120から出力される信号が周波数変換部140に入力されることによって周波数変換部140においては、ライトピックオフ8から入力される入力信号(入口側速度信号)を発信器120から出力される信号によって周波数変換している。
この周波数変換部140において周波数変換された信号は、発信器120の出力信号によって一定の周波数信号に変換されるようになっている。
【0087】
このように可変調な発信器120によってコントロールされると、この発信器120から出力される出力周波数によって、周波数変換部110と同様、周波数変換部140においても、周波数変換される。
【0088】
また、周波数変換部110の出力端には、周波数計測部160と位相差計測部130が接続されている。この周波数計測部160は、周波数変換部110において周波数変換された出力周波数を計測するものである。
また、周波数変換部140には、位相差計測器130が接続されている。
この周波数計測部160は、周波数変換部110において、レフトピックオフ(左速度センサ)7によって検出され、ローパスフィルタ30によって取り出された低い周波数の左速度信号(出口側速度信号)をA/Dコンバータ31によってデジタル信号に変換され出力される入力信号周波数θと、発信器120から出力される出力周波数θXnとを加算(または減算)して求められる出力信号の周波数(θCn=θ+θXn)を計測するものである。
【0089】
この周波数計測部160において計測された周波数計測値は、発信器120に出力される。この発信器120においては、周波数計測部160から出力される出力信号周波数(θCn=θ+θXn)の計測値を入力すると、この出力信号周波数(θCn=θ+θXn)の計測値に基づいて、所定の周波数信号(θXn)を発信し、発信器120から周波数変換部110と周波数変換部140に出力する。
このような周波数変換部110→周波数計測部160→発信器120→周波数変換部110のフィードバックループによって、A/Dコンバータ31からの入力される左速度信号(出口側速度信号)の入力周波数と発信器120から出力される出力周波数を周波数変換部110で加算、又は減算をし、周波数変換部110において周波数変換される。
【0090】
この周波数変換部140から出力される変換周波数は、ライトピックオフ(右速度センサ)8によって検出され、ローパスフィルタ34によって取り出された低い周波数の右速度信号(入口側速度信号)がA/Dコンバータ35においてデジタル信号に変換された入力信号周波数(θ+δφ)と、発信器120から出力される出力周波数θXnとを加算(または減算)して求められる。
このように、周波数変換部140から出力され位相計測部130に入力される入力信号周波数は、周波数変換部140において、発信器120から出力される出力周波数θXnを用いて、A/Dコンバータ35から出力されるデジタル信号の低い周波数の右速度信号(入口側速度信号)である入力信号周波数(θ+δφ)を周波数シフトして別の周波数帯域に移動させることが可能となる。
【0091】
このように発信器120がコントロールされると、この発信器120から出力される出力周波数θXnによって、周波数変換部110と同様、周波数変換部140においても、周波数変換が行なわれる。
可変調な発信器120は、このように極めて容易な算式によって周波数コントロールされる。
【0092】
また、周波数変換部110には、位相差計測器130が接続されている。また、周波数変換部140には、位相差計測器130が接続されている。
この位相差計測器130は、A/Dコンバータ31から出力され周波数変換部110に入力される左速度信号(出口側速度信号)の周波数θと、A/Dコンバータ35から出力され周波数変換部140に入力される右速度信号(入口側速度信号)の周波数(θ+δφ)は共に同一の一定した所望の周波数に変換されて位相差計測を行う。
【0093】
このように構成することにより、本実施の形態によれば、入力周波数(左速度信号,右速度信号)を所望の周波数帯域に変換することによって、入力周波数(左速度信号,右速度信号)の帯域をシフトさせ、フィルタのテーブル数を大幅に減らし、また位相計測処理をより効果的に行うことができる。
本発明の効果として、入力周波数に応じた多くのフィルタや、演算方法の変更など複雑な処理を一切行うことなく、常に一定で誤差のほとんどない高速な演算を行うことが可能となることである。もちろん位相計測部の処理は、DFT(Discrete Fourier Transform:離散フーリエ変換)でも、FFT(Fast Fourier Transform:高速フーリエ変換)でも実現が可能である。
【0094】
A/Dコンバータ31とA/Dコンバータ35には、クロック150から、クロック信号が入力するようになっている。このクロック150は、A/Dコンバータ31とA/Dコンバータ35の出力の同期を取るもので、A/Dコンバータ31から出力される左速度信号のデジタル信号と、A/Dコンバータ35から出力される右速度信号のデジタル信号とのサンプリング誤差をなくす重要な役割を担っている。
このようにA/Dコンバータ31,35によってデジタル信号に変化されたそれぞれの入力信号(左速度信号,右速度信号)は、周波数変換部110,140において、発信器120からの出力信号を用いて周波数変換される。
【0095】
次に、図3に図示の信号処理装置100における位相差計測演算の具体的な演算方法について説明する。
ここでは、変調合成周波数の和成分信号による位相計測について説明する。
周波数変換部110の出力周波数を周波数計測部160によって計測し、その値を用いて発信器120の発信周波数をコントロールする。
信号処理装置100では、周波数変換部110の出力周波数を周波数計測部160によって計測する。
【0096】
初期状態においては、発信器120の出力信号θXnは、発信器120から出力されていないので、初期の発信器120からの出力信号θX0は、
〔式6〕
θX0=0 ………………(6)
となっている。
したがって、コリオリ流量計1の加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3に設けられるレフトピックオフ7から出力される出力信号(左速度信号)である流量信号LPOに対し、被周波数変調周波数の和成分周波数は、(θ+θXn)と表すことができるので、θXn=θX0で、周波数変換器110の出力信号周波数は、式(6)より、
〔式7〕
θco=θ+θX0=θ ………………(7)
となり、初期の計測周波数は、LPO信号周波数θにより起動される。
【0097】
次の第一次ステップの発信器120からの出力信号θX1において、位相計測周波数θC=目標周波数設定値=constとすべく初期計測周波数を比較する。そして次式(8)に示す如くこの差分が発信器120の出力信号となるように、θX1を決定する。
〔式8〕
θX1=θC−θ ………………(8)
と、発信器周波数θX1を求める。
そして、第一次ステップの発信器周波数θX1を求めることによってθC=constとなる。
次のステップの発信器120からの出力信号θX2において設定されるべき周波数変換部110の出力信号周波数は、
〔式9〕
θ+θX1=θC1 ………………(9)
となる。
【0098】
したがって、次のステップの発信器120からの出力信号θX2は、式(8)を元にして、
〔式10〕
θX2=θX1+θC−(θ+θX1) ………………(10)
となる。
【0099】
以上の動作を繰り返し行うと、
〔式11〕
となる。
【0100】
このようにクロック150の実時間処理クロックにしたがって、発信器120からの出力周波数θXnがコントロールされると、θXn≒θXn−1となる。
このことから、最終的に周波数変換部110の出力信号周波数(θ+θXn)は、
〔式12〕
θC=θ+θXn …………………(12)
となる。
したがって、時系列的処理において、式(12)により後段の位相計測の高速処理を可能にすることができる。
【0101】
図3に図示のローパスフィルタ30において、高調波ノイズを取り除きA/D変換時の折り返しノイズの影響を取り除くと、図4に示す如きsin信号(sinθ)が出力される。
このローパスフィルタ30から出力された図4に示す如きsin信号(sinθ)は、A/Dコンバータ31において、任意の一定周期でサンプリングしてデジタル信号化が行われ、図5に示す如きサンプリング信号(sinθ)が得られ、A/Dコンバータ31から出力される。
【0102】
このローパスフィルタ30から出力され、A/Dコンバータ31においてサンプリングされデジタル信号化が行われた図5に示す如き信号(sinθ)は、図3に図示の信号処理装置100の周波数変換部110に入力される。また、この周波数変換部110には、発信器120から出力される発信器出力信号が入力される。
この発信器120においては、周波数計測部160から出力される出力信号周波数(θCn=θ+θXn)の計測値の入力によって、この出力信号周波数(θCn=θ+θXn)の計測値に基づいて、所望な周波数で発信器120における発信周波数信号(θXn)を発信し、発信出力レートを入力信号のA/Dコンバータ31におけるサンプリング周期と同じレートで図6に示す如きcos信号(cosθXn)が出力する。
【0103】
発信器120からの出力信号(cosθXn)が周波数変換部110に入力されると、周波数変換部110においては、A/Dコンバータ31においてサンプリングされデジタル信号化が行われた図5に示す如き信号(sinθ)と、発信器120から出力される図6に示す如き出力信号(cosθXn)とを周波数変換部110内の掛け算器において掛け算(sinθ×cosθXn)を行って、図7に示す如き信号(sinθ×cosθXn)を得る。
この周波数変換部110内の掛け算器において掛け算(sinθ×cosθXn)を行って得た図7に示す如き信号(sinθ×cosθXn)は、周波数変換部110内において、ハイパスフィルタ(HPF)を通して、低い周波数成分を取り除いて、図8に示す如き信号(sinθC)を得る。この図8に示す如き信号(sinθC)は、周波数変換部110から出力されて、周波数計測部160と、位相差計測器130に入力される。
【0104】
コリオリ流量計1の加振器6によって測定チューブ2,3を振動したときに、測定チューブ2,3に設けられる振動速度センサ70(レフトピックオフ7,ライトピックオフ8)からの出力信号(左速度信号,右速度信号)は、図3に図示の信号処理装置100を構成する周波数変換部110,140と、発信器120と、位相差計測器130と、周波数計測部160の4つのブロックにおいて、位相差が演算された後、周波数計測部160から出力される周波数信号と、温度センサ9によって検出される温度のデータをもとに流量信号に変換される。
【0105】
次に、図9に示すタイムチャートを用いて、図3に図示の信号処理装置100における動作について説明する。
まず、図3に図示のローパスフィルタ30において、高調波ノイズを取り除きA/D変換時の折り返しノイズの影響を取り除くと、図5に示す如きsin信号(sinθ)が出力される。
この図5に示されるsin信号(sinθ)が出力されると、この図5に図示のsin信号(sinθ)がA/Dコンバータ31に入力される。そして、このA/Dコンバータ31においては、任意の一定周期でサンプリングしてデジタル信号化が行われ、図9(A)に示す如きサンプリング信号(Y1=sinθ)が得られ、A/Dコンバータ31から出力される。
【0106】
このA/Dコンバータ31から出力された図9(A)に図示のサンプリング信号(sinθ)は、図3に図示の信号処理装置100の周波数変換部110に入力される。
一方、信号処理装置100の周波数計測部160においては、周波数変換部110から出力される信号に基づいて計測された周波数(θCn=θ+θXn)信号が出力される。この周波数計測部160から出力される出力信号周波数(θCn=θ+θXn)の計測値が入力される発信器120においては、この出力信号周波数(θCn=θ+θXn)の計測値に基づいて、所望の発信周波数信号(θXn)を発信し、発信出力レートを入力信号のA/Dコンバータ31におけるサンプリング周期と同じレートで図9(B)に示す如きcos信号(Y2=cosθXn)を出力する。
【0107】
発信器120から図9(B)に図示のcos信号(Y2=cosθXn)が周波数変換部110に入力されると、周波数変換部110内の掛け算器においては、A/Dコンバータ31から出力される図9(A)に図示のサンプリング信号(Y1=sinθ)と掛け算(sinθ×cosθXn)を行って、図9(C)に示す如き信号(Y3=sinθ×cosθXn)を得る。
この周波数変換部110内の掛け算器において掛け算(sinθ×cosθXn)を行って得た図9(C)に図示の信号(Y3=sinθ×cosθXn)は、周波数変換部110内において、ハイパスフィルタ(HPF)を通して、低い周波数成分を取り除いて、図9(D)に示す如き信号(Y4=1/2・sinθC)を得る。この図9(D)図示の信号(Y4=1/2・sinθC)は、周波数変換部110から出力されて、周波数計測部160と、位相差計測器130に入力される。
【0108】
また、図3に図示のローパスフィルタ34において、高調波ノイズを取り除きA/D変換時の折り返しノイズの影響を取り除くと、sin信号(sin(θ+δφ))が出力される。
このsin信号(sin(θ+δφ))が出力されると、このsin信号(sin(θ+δφ))は、A/Dコンバータ35に入力される。そして、このA/Dコンバータ35においては、任意の一定周期でサンプリングしてデジタル信号化が行われる。
そして、このA/Dコンバータ35から出力される信号と、A/Dコンバータ35から出力されるサンプリング信号とを周波数変換部140内の掛け算器において掛け算を行って信号を得る。
【0109】
この周波数変換部140内の掛け算器において掛け算を行って得た信号は、周波数変換部110内において、ハイパスフィルタ(HPF)を通して、低い周波数成分を取り除いて、図9(E)に示す如き信号(Y5=1/2・sin(θC+δφ))を得る。この図9(E)図示の信号(Y5=1/2・sin(θC+δφ))は、周波数変換部110から出力されて、周波数計測部160と、位相差計測器130に入力される。
位相差計測器130においては、周波数変換部110から出力されて、位相差計測器130に入力される図9(D)図示の信号(Y4=1/2・sinθC)と、周波数変換部140から出力されて、位相差計測器130に入力される図9(E)図示の信号(Y5=1/2・sin(θC+δφ))とに基づいて、図9(F)に示す如き信号(Y6=δφ)を、その位相差δφとして出力する。
【0110】
このように演算周期をサンプリング時間と同期させることによって、位相計測時のリアルタイム性をあげることができる。
また、一対の振動速度信号(sinθ,sin(θ+δφ))は、どちらも同じ処理を行い位相計算されるため演算誤差がほとんど無く、正確な位相計算を行うことができる。
【実施例2】
【0111】
次に、図10に図示の動作フローチャートを用いて、信号処理方法について説明する。
図10には、フィードバックループを用いた場合の周波数変調および位相計測におけるフローチャートが示されている。
図10において、ステップ200では、演算器である信号処理装置100のパラメータを初期化する。この信号処理装置100のパラメータの初期化が行われると、ステップ200において、周波数変調における目標周波数、すなわち、周波数変調後の目標周波数の設定を行い、さらに、初期参照波形の周波数を設定、すなわち、参照信号周波数の初期設定を行う。
【0112】
ステップ200において、演算器である信号処理装置100のパラメータの初期化が行われ、周波数変調後の目標周波数の設定、参照信号周波数の初期設定が行われると、ステップ210において、レフトピックオフ(LPO)7(左速度センサ7)から出力される位相/及び速度信号をA/Dコンバータ31において任意のサンプリング周期でサンプリングしてデジタル信号化し、ライトピックオフ(RPO)8(右速度センサ8)から出力される位相/及び速度信号をA/Dコンバータ35において任意のサンプリング周期でサンプリングしてデジタル信号化する。
そして、このA/Dコンバータ31において任意のサンプリング周期でサンプリングしてデジタル信号化された位相/及び速度信号は、周波数変換器110に、A/Dコンバータ35において任意のサンプリング周期でサンプリングしてデジタル信号化された位相/及び速度信号は、周波数変換器140に、それぞれ入力される。
【0113】
このステップ210において任意のサンプリング周期でサンプリングしデジタル信号化されると、ステップ220において、参照信号用の発信器120に出力周波数を設定し、参照信号の生成を行う。参照信号の生成が行われると、この発信器120から、発信器120において設定された周波数の参照信号が出力され、周波数変換器110,140に入力される。
【0114】
このステップ220において発信器120に参照信号の生成が行われると、ステップ230において、周波数変換器110,140の処理が行われる。すなわち、発信器120から出力される参照周波数信号が入力された周波数変換器110においては、A/Dコンバータ31から出力されてくる位相/及び速度信号を発信器120から出力される参照信号を用いて、任意の周波数の位相/及び速度信号に変換する。
また、発信器120から出力される参照周波数信号が入力された周波数変換器140においては、A/Dコンバータ35から出力されてくる位相/及び速度信号を発信器120から出力される参照信号を用いて、任意の周波数の位相/及び速度信号に変換する。
【0115】
このステップ230において任意の周波数の位相/及び速度信号への変換が行われると、ステップ240において、周波数変換後の周波数が計測され、初期設定時の周波数変調における目標周波数と比較する。
すなわち、周波数変換器110において任意の周波数変換されたA/Dコンバータ31から出力されてくる位相及び速度信号は、周波数計測器160と位相計測器130に入力される。そして、この周波数計測器160において、周波数変換後の周波数が計測され、発信器120から出力される初期設定時の周波数変調における目標周波数と比較される。
【0116】
このステップ240において初期設定時の周波数変調における目標周波数と比較が行われると、ステップ250において、発信器120から出力される次回の参照信号の発信周波数の決定を行う。
すなわち、ステップ250においては、ステップ240において比較された差分の周波数が0Hzになるように、発信器120から出力される次回の参照信号の発信周波数の決定を行う。
このステップ250において発信器120から出力される次回の参照信号の発信周波数の決定を行うと、ステップ260において、位相計測を行う。
すなわち、ステップ260においては、発信器120から出力される参照信号の発信周波数に基づいて任意の一定周波数に変換された位相及び速度信号が位相計測器130に入力される。この位相計測器130においては、周波数変換器110から出力される任意の一定周波数に変換された位相及び速度信号に基づいて、FFT等を用いて位相計測する。このようにFFT等を用いて位相計測することによって、常に同じ演算周期で高精度な位相差計測が行える。
【0117】
以下に、信号処理装置100を構成する周波数変換部110,140と、発信器120と、位相差計測器130と、周波数計測部160の4つのブロックについて説明する。
(1)周波数変換部
信号処理装置100の周波数変換部110は、図11に示す如き構成を有している。
図11において、周波数変換部110は、掛け算器111と、ローパスフィルタ(LPF)112(又は、ハイパスフィルタ(HPF))で構成されている。
発信器120からの参照信号cosθ2と、A/Dコンバータ31からの入力信号SINθ1を掛け算し、その後、ローパスフィルタ112によってフィルタ処理を行う。
【0118】
まず、発信器120からの参照信号cosθ2と、レフトピックオフ(左速度センサ)7によって検出され、ローパスフィルタ30によって取り出された低い周波数の左速度信号(出口側速度信号)がA/Dコンバータ31においてデジタル信号に変換され出力される入力信号sinθ1を掛け算し、
〔式13〕
と、和と差の周波数信号を合成する。
この和と差の合成信号にローパスフィルタ(又は、ハイパスフィルタ)112を掛けることによって差の信号(又は、和の信号)のみを取り出す。
ここでは、具体的な説明をするため、和の信号を取り出すこととしているが、差の信号でも問題なく、周波数変換方法に応じてフィルタの処理方法は、適宜対応される。
【0119】
ローパスフィルタ(又は、ハイパスフィルタ)112からの出力は、
〔式14〕
となり、このときのローパスフィルタ(又は、ハイパスフィルタ)112からの出力信号周波数θ3は、常に一定になるようにコントロールされる。
このため、使用するフィルタは、入力信号によらず、常に同一のフィルタを用いることができる。
また、このことによって、周波数変換部110の後段の位相差計測器130における位相計測を非常に画一的に、かつ単純化して処理を行うことができる。
【0120】
(2)周波数計測部
周波数の計測方法としては、本実施の形態においては、PLL(PLL; Phase-locked loop 位相同期回路)の原理を用いる。このPLLは、入力される交流信号と周波数が等しく、かつ位相が同期した信号を、フィードバック制御により別の発振器から出力する電子回路が知られている。
このようにPLLは、もともと位相を同期するための回路で、入力信号に対して位相の同期した信号を作ることができるようになっている。
このPLLは、外部から入力された基準信号と、ループ内の発振器からの出力との位相差が一定になるよう、ループ内発振器にフィードバック制御をかけて発振させる発振回路で、演算器で構成することが比較的簡単で、さらに高速で演算することが可能である。
【0121】
信号処理装置100の周波数計測部160は、図12に示す如き構成を有している。
図12において、周波数計測部160は、掛け算器161と、ローパスフィルタ(LPF)162と、周波数計測用発信器163とによって構成されている。
周波数変換部110には、掛け算器161が接続されている。この周波数変換部110からは、レフトピックオフ(左速度センサ)7によって検出され、ローパスフィルタ30によって取り出された低い周波数の左速度信号(出口側速度信号)がA/Dコンバータ31においてデジタル信号に変換され出力されてくる入力信号周波数θと、発信器120から出力される出力周波数θXnとを加算(または減算)された変換周波数信号sin(θ+θXn)が出力され、掛け算器161に入力される。
【0122】
そして、この掛け算器161は、周波数変換部110の出力信号と、周波数計測用発信器163から出力される出力信号cosδの位相を比較し、その差信号と和信号としてローパスフィルタ162に出力するものである。
したがって、掛け算器161の出力端には、ローパスフィルタ162が接続されている。このローパスフィルタ162は、掛け算器161から出力される出力信号を周波数フィルタを通して、低い周波数の信号のみ取り出すものである。
したがって、ここでは、掛け算器161から出力される出力信号の中で差の成分のみを取り出している。
【0123】
また、ローパスフィルタ162には、周波数計測用発信器163が接続されている。この周波数計測用発信器163は、ローパスフィルタ162から出力される低い周波数の信号を基に位相データδを生成するものである。
そして、このローパスフィルタ162によって濾波出力される差の成分のみの出力データV(周波数演算関数V)が0になるように帰還ループが形成される。
【0124】
図12に図示のように周波数変換部110から出力され掛け算器161に入力される入力信号をSINθ、発信器120から出力され掛け算器161に入力される出力信号をcosδとおき、その2つの波形を掛け算器161において掛け算すると、
〔式15〕
となる。
この式(15)に示される掛け算器161における掛け算結果をローパスフィルタ162を掛けることによって、高い周波数成分が除去され、
〔式16〕
V=sin(θ−δ) …………………(16)
となる。
【0125】
式(15)の(θ−δ)の値が十分小さい値(V≒0)のとき、掛け算器161における掛け算結果を示す周波数演算関数Vは、
〔式17〕
V=θ−δ≒0 …………………(17)
で近似することができる。
ここで、周波数演算関数Vが0になるように周波数計測用発信器163の出力波形をコントロールすることによって、周波数変換部110において周波数変換した後の位相θを求めることができる。
【0126】
このようにして求めた周波数変換部110から出力される周波数変換後の位相θを、次の式(17)、式(18)を用いて演算することによって周波数fを求めることができる。
〔式18〕
ここで、ΔTは、時間変化を表しており、演算周期(サンプリングレート)と等しくなる。
したがって、位相変化(θ)は、
〔式19〕
θ=2・π・f・Ta ……………………(19)
但)Ta:時間変化(サンプリング周期)(sec)
f:入力周波数(Hz)
θ:位相変化(rad)
となる。
【0127】
そして、入力周波数fは、
〔式20〕
となる。
このような計算を周波数計測器160において行うことによって、高速な周波数計測を行うことができる。
【0128】
(3)発信器
図3において可変調な発信器120は、周波数計測部160の計測結果(θ+θXn)に基づいて出力周波数が制御される。
すなわち、発信器120は、加振器6によって測定チューブ2,3を振動したときにレフトピックオフ7によって検出され周波数変換部110に入力される測定チューブ2,3の左側に生じる振動速度の検出信号(出口側速度信号)の周波数θを位相差計測器130で処理される所望な周波数に制御する。
この周波数変換部110と周波数変換部140とは、同じ構成となっている。このため、周波数変換部110から出力される周波数同様、周波数変換部140から出力される周波数は、加振器6によって測定チューブ2,3を振動したときにライトピックオフ8によって検出され周波数変換部140に入力される測定チューブ2,3の右側に生じる振動速度の検出信号(入口側速度信号)の周波数(θ+δφ)を所望な周波数に変換する。
【0129】
(4)位相計測器
位相計測の方法には、種々な方法があるが、フーリエ変換を用いた位相計測の場合、周波数が固定されているため、非常に演算を高速に行うことが可能となる。
以下に、離散フーリエ変換(Discrete Fourier Transform;DFT)を例にとって説明する。この離散フーリエ変換というのは、離散群上のフーリエ変換であり、信号処理などで離散化されたデジタル信号の周波数解析などによく使われ、偏微分方程式や畳み込み積分を効率的に計算するためにも使われるものである。この離散フーリエ変換は(計算機上で)高速フーリエ変換(FFT)を使って高速に計算することができる。
【0130】
いま、位相差計測器130において、サンプリングされた入力信号をg(n)とすると、そのDFT G(k)は、
〔式21〕
と定義される。
【0131】
さらに表現を簡潔にするために、複素指数関数の部分を、
〔式22〕
と置き換えて表現すると、式(21)は、
〔式23〕
となる。
【0132】
ここで、複素指数関数WNnkに注目し、さらにNを、N=2M(M:整数)たとえば、N=8として考えると、入力周波数がサンプリング周波数の1/4の時、三角関数の周期性より実数部と虚数部の関数を、
〔式24〕
と、0.1,−1で表現することができる。
このようにして、サンプリング周波数の1/4に周波数変換した入力信号LPO,RPOを非常に簡単にフーリエ変換することができ、さらに通常位相計測においては、単一の周波数(振動周波数)のみフーリエ変換すればよいので、他の周波数帯域について変換は行わないため、加減算のみで演算することが可能である。
【0133】
実際には、位相差計測器130に入力された入力信号をg(n)とし、入力信号をg(n)がサンプリングレートの1/4の周波数とし、さらにNを、N=2M(M:整数)とした場合、そのDFT G(n)の演算は、
〔式25〕
のように演算することができる。
Mの値が大きくなっても基本的な演算は全く変わらないので、Mを大きくするほど非常に精度良く計算することが可能であり、演算負荷もほとんど変わらない。
【0134】
さらに、2つの入力信号を前述の手順によって離散フーリエ変換(DFT)した結果、RPO信号を、
〔式26〕
とおき、LPO信号を、
〔式27〕
とおくことが可能である。
【0135】
このときの入力信号の位相角tanδφは、
〔式28〕
となる。
【0136】
この式(28)において、入力信号の位相角tanδφを求めた後、そのtan−1δφを演算して位相差信号δφを求めることができる。
また、被測定流体の質量流量Qは、位相角に比例し駆動周波数Fに反比例することから、
〔式29〕
Q=S(t)・δφ/F …………………(29)
但)S(t):測定流体の温度に関連した補正係数
と表され、この式(29)に計測した位相角δφと駆動周波数Fを代入することによって質量流量Qを計算することができる。
このようにして求めた質量流量Qは、適切なスケーリングや単位換算が行われ、アナログ出力、パルス出力、シリアル通信など後段の処理を追加することによって様々な形態で外部に出力することができる。
【0137】
《周波数変換を用いた位相計測方法の特長》
本発明に係る位相計測システムの特徴は、レフトピックオフ(左速度センサ)7によって検出され、ローパスフィルタ30によって取り出された低い周波数の左速度信号(出口側速度信号)をA/Dコンバータ31によってデジタル信号に変換され出力され、周波数変換部110に入力される入力信号の周波数θとは無関係なサンプリング周期で信号をサンプリングできるので、非常に構成が簡単で、さらにフィルタのテーブルを必要とせず、さらに演算誤差が少ない非常に高速な演算が可能となる。
【0138】
また、本発明に係る位相計測システムによると、レフトピックオフ(左速度センサ)7によって検出され、ローパスフィルタ30によって取り出された低い周波数の左速度信号(出口側速度信号)をA/Dコンバータ31によってデジタル信号に変換され出力され、周波数変換部110に入力される入力信号に急激な周波数変化が生じても、周波数変換のフィードバックループによって、応答良く追従することができ、周波数変換後の周波数を直接計測し、位相計測を行うため、周波数変換に伴う周波数変換誤差が最小限に抑えら、非常に高安定性で正確な位相計測に適している。
そして位相計測だけでなく同時に周波数変換後の周波数と発信器120の発信周波数より入力信号の周波数を求めることができる。
ここで求められた周波数は、高速なフィードバックループより応答性の高い極めて安定な周波数となる。
【0139】
さらに、本発明に係る位相計測システムによると、周波数変換部110に入力される入力信号の入力周波数による位相計測の帯域制限が殆ど無いため、さまざまな駆動周波数のセンサと結合することが可能となり、さらに入力周波数によって演算精度が影響されないため、常に高精度な位相計測が可能となる。
【実施例3】
【0140】
測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブからなる測定チューブ2,3を駆動装置によって加振器6を作動させる。この一本、若しくは一対のフローチューブからなる測定チューブ2,3を交番駆動して、このフローチューブを振動させる。そして、レフトピックオフ(LPO)7とライトピックオフ(RPO)8とによって構成される振動検出センサである一対の速度センサ若しくは加速度センサによって、一本、若しくは一対のフローチューブからなる測定チューブ2,3に作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計が構成されている。
【0141】
このコリオリ流量計に、可変調な周波数信号を発信出力する発信器120を設ける。
さらに、一対の振動検出センサ(レフトピックオフ7,ライトピックオフ8)の内、一方の速度センサ(例えば、レフトピックオフ7から入力される入力信号(出口側速度信号))を第1のA/Dコンバータ31によってデジタル信号に変換する。そして、この入力信号周波数θを、発信器120から出力される出力周波数θXnを用いて、特定した一定周波数信号に周波数シフトして所望の周波数帯域に移動する第1の周波数変換部110を設ける。
【0142】
一対の振動検出センサ(レフトピックオフ7,ライトピックオフ8)の内、他方の速度センサ(例えば、ライトピックオフ8から入力される入力信号(入口側速度信号))を第2のA/Dコンバータ35によってデジタル信号に変換された入力信号周波数θを、発信器120から出力される出力周波数θXnを用いて、特定した一定周波数信号に周波数シフトして所望の周波数帯域に移動する第2の周波数変換部140を設ける。
【0143】
第1の周波数変換部110から出力される一定の周波数信号に変換された第1の周波数信号の周波数を計測し、この計測した第1の周波数信号の周波数値を発信器120に出力して、周波数変換部110において周波数変換を行った後の周波数が、常に一定周波数となるように出力周波数をコントロールする周波数計測部160を設ける。
さらに、第1の周波数変換部110から一定の周波数信号に変換された第1の周波数信号と、第2の周波数変換部140から出力される一定の周波数信号に変換された第2の周波数信号との位相差の計測を行う位相差計測部130を設ける。
【0144】
そして、第1の周波数変換部110から出力される一定の周波数信号に変換された第1の周波数信号と、第2の周波数変換部140から出力される一定の周波数信号に変換された第2の周波数信号との位相差を得る信号処理装置100を設けてコリオリ流量計を構成する。
【符号の説明】
【0145】
1………………………コリオリ流量計
2,3…………………測定チューブ
4………………………検出器
5………………………変換器
6………………………加振器
7………………………左速度センサ
8………………………右速度センサ
9………………………温度センサ
10……………………駆動制御部
11……………………位相計測部
12……………………温度計測部
30,34……………ローパスフィルタ
31,35……………A/Dコンバータ
70……………………振動速度センサ
80……………………振動速度信号演算器
85……………………周波数変換部
90……………………発信器
95……………………位相差計測器
100…………………信号処理装置
110…………………周波数変換部
111…………………掛け算器
112…………………ローパスフィルタ
120…………………発信器
130…………………位相差計測器
140…………………周波数変換部
150…………………クロック
160…………………周波数計測部
161…………………掛け算器
162…………………ローパスフィルタ
163…………………周波数計測用発信器
【特許請求の範囲】
【請求項1】
測定用の流管を構成する少なくとも一本、又は一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである2つの速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
前記速度センサ若しくは加速度センサから検出される前記フローチューブに作用するコリオリの力に比例した振動周波数の入力信号をA/D変換して得る2つの流量信号の各々について任意の発振周波数に基づいて合成して周波数変換し,
少なくとも一方のセンサの合成波形の周波数を計測し,
前記計測した周波数に基づいて制御信号を発信し,
前記合成周波数信号の合成した合成成分の和分または差分の成分の周波数が常に一定となるように制御し,
前記制御信号よりフローチューブの共振周波数を求め、被計測流体の密度を算出し、
前記制御された各々の変換合成周波数の和分または差分の信号から位相を計測する
ことを特徴とする信号処理方法。
【請求項2】
前記任意の発振周波数に基づく合成周波数変換は,
前記一方のセンサからの入力信号SINθ1と、前記発信する制御信号cosθ2とを掛け算し,
前記掛け算して出力される出力信号を周波数フィルタを通して、低い周波数の信号のみ取り出すようにした
ものである請求項1に記載の信号処理方法。
【請求項3】
前記任意の発振周波数に基づく合成周波数変換は,
前記一方のセンサからの入力信号SINθ1と、前記発信する制御信号cosθ2とを掛け算し,
前記掛け算して出力される出力信号を周波数フィルタを通して、高い周波数の信号のみ取り出すようにした
ものである請求項1に記載の信号処理方法。
【請求項4】
前記速度センサ若しくは加速度センサから検出される前記フローチューブに作用するコリオリの力に比例した振動周波数の入力信号は、
前記A/D変換においてサンプリングしてデジタル信号化が行われ,
前記発信する制御信号に基づいて合成周波数変換して得られる各々の変換合成周波数信号は,
合成した合成成分の和分または差分の成分の周波数が前記A/D変換時のサンプリング周波数の1/4になるように制御する
ものである請求項1に記載の信号処理方法。
【請求項5】
測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器と,
前記速度センサ若しくは加速度センサによって検出される入力周波数と、前記発信器の出力周波数FXを加算(又は減算)して周波数変換し、該周波数変換後の周波数値が常に一定になるように周波数シフトする周波数変換部と,
によって構成してなることを特徴とする信号処理装置。
【請求項6】
測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該少なくとも一本、若しくは一対のフローチューブを振動させて、振動検出センサである一対の速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器と,
前記一対の振動検出センサの一方のセンサを第1のA/Dコンバータによってデジタル信号に変換された該入力信号周波数と、前記発信器から出力される出力周波数とを加算(または減算)して該周波数変換後の周波数値が常に一定になるように周波数変換する第1の周波数変換部と,
前記一対の振動検出センサの他方のセンサを第2のA/Dコンバータによってデジタル信号に変換された該入力信号周波数と、前記発信器から出力される出力周波数とを加算(または減算)して該周波数変換後の周波数値が常に一定になるように周波数変換する第2の周波数変換部と,
によって構成したことを特徴とする信号処理装置。
【請求項7】
測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである一対の振動検出センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器と,
前記一対の振動検出センサの一方の速度センサを第1のA/Dコンバータによってデジタル信号に変換されて出力されてくる入力信号周波数を、前記発信器から出力される出力周波数を用いて、常に一定の周波数信号に周波数シフトして別の周波数帯域に移動する第1の周波数変換部と,
前記一対の振動検出センサの他方の速度センサを第2のA/Dコンバータによってデジタル信号に変換されて出力されてくる入力信号周波数を、前記発信器から出力される出力周波数を用いて、常に一定の周波数信号に周波数シフトして別の周波数帯域に移動する第2の周波数変換部と,
前記第1の周波数変換部から出力される一定の周波数信号に変換された第1の周波数信号の周波数を計測し、該計測した第1の周波数信号の周波数値を前記発信器に出力して、前記周波数変換部において周波数変換を行った後の周波数が、前記第1のA/Dコンバータによってデジタル信号に変換されて入力される一対の振動速度センサの一方の速度センサ信号の入力周波数を所望の周波数になるように第1及び第2の周波数変換部の出力周波数をコントロールする周波数計測部と,
によって構成したことを特徴とする信号処理装置。
【請求項8】
前記周波数変換部は,
前記発信器からの参照信号cosθ2と、前記第1のA/Dコンバータからの入力信号SINθ1を掛け算する掛け算器と,
前記掛け算器において掛け算して出力されてくる出力信号を周波数フィルタを通して、低い周波数の信号のみ取り出すローパスフィルタと,
によって構成したことを特徴とする請求項5,6又は7に記載の信号処理装置。
【請求項9】
前記周波数変換部は,
前記発信器からの参照信号cosθ2と、前記第1のA/Dコンバータからの入力信号SINθ1を掛け算する掛け算器と,
前記掛け算器において掛け算して出力されてくる出力信号を周波数フィルタを通して、高い周波数の信号のみ取り出すハイパスフィルタと,
によって構成したことを特徴とする請求項5,6又は7に記載の信号処理装置。
【請求項10】
前記周波数計測部は,
前記第1の周波数変換部に接続される掛け算器と、該掛け算器に接続されるローパスフィルタと、該ローパスフィルタに接続され、該ローパスフィルタからの出力信号を入力する周波数計測用発信器とからなり,
前記掛け算器は、前記第1の周波数変換部から出力される出力信号sin(θ+θXn)と、周波数計測用発信器から出力される出力信号cosδの位相を比較し、その差信号と和信号として後段のローパスフィルタに出力するもので,
前記ローパスフィルタは、前記掛け算器から出力される出力信号を周波数フィルタを通して、低い周波数の信号のみ取り出すもので,
該ローパスフィルタから出力される低い周波数の信号を基に基本出力波形の位相量Vが生成され、該位相量Vは前記周波数計測用発信器によって常に、
V=0
なる条件を満たす
ことを特徴とする請求項7,8又は9に記載の信号処理装置。
【請求項11】
前記第1のA/Dコンバータと前記第2のA/Dコンバータの出力の同期を取るクロックを設け,
前記第1のA/Dコンバータから出力される一対の振動検出センサのいずれか一方のデジタル信号と、前記第2のA/Dコンバータから出力される該振動検出センサの他方のデジタル信号との同期を取るようにしたことを特徴とする請求項7,8,9又は10に記載の信号処理装置。
【請求項12】
前記位相計測部の処理は,
DFT(Discrete Fourier Transform:離散フーリエ変換)又は、FFT(Fast Fourier Transform:高速フーリエ変換)である請求項7,8,9,10又は11に記載の信号処理装置。
【請求項13】
測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである一対の速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器と,
前記一対の振動検出センサの一方の速度センサを第1のA/Dコンバータによってデジタル信号に変換された該入力信号周波数θを、前記発信器から出力される出力周波数θXnを用いて、特定した一定周波数信号に周波数シフトして所望の周波数帯域に移動する第1の周波数変換部と,
前記一対の振動検出センサの他方の速度センサを第2のA/Dコンバータによってデジタル信号に変換された該入力信号周波数θを、前記発信器から出力される出力周波数θXnを用いて、特定した一定周波数信号に周波数シフトして所望の周波数帯域に移動する第2の周波数変換部と,
前記第1の周波数変換部から出力される一定の周波数信号に変換された第1の周波数信号の周波数を計測し、該計測した第1の周波数信号の周波数値を前記発信器に出力して、前記周波数変換部において、周波数変換後の周波数が、常に一定周波数となるように出力周波数をコントロールする周波数計測部と,
を設けたことを特徴とするコリオリ流量計。
【請求項1】
測定用の流管を構成する少なくとも一本、又は一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである2つの速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
前記速度センサ若しくは加速度センサから検出される前記フローチューブに作用するコリオリの力に比例した振動周波数の入力信号をA/D変換して得る2つの流量信号の各々について任意の発振周波数に基づいて合成して周波数変換し,
少なくとも一方のセンサの合成波形の周波数を計測し,
前記計測した周波数に基づいて制御信号を発信し,
前記合成周波数信号の合成した合成成分の和分または差分の成分の周波数が常に一定となるように制御し,
前記制御信号よりフローチューブの共振周波数を求め、被計測流体の密度を算出し、
前記制御された各々の変換合成周波数の和分または差分の信号から位相を計測する
ことを特徴とする信号処理方法。
【請求項2】
前記任意の発振周波数に基づく合成周波数変換は,
前記一方のセンサからの入力信号SINθ1と、前記発信する制御信号cosθ2とを掛け算し,
前記掛け算して出力される出力信号を周波数フィルタを通して、低い周波数の信号のみ取り出すようにした
ものである請求項1に記載の信号処理方法。
【請求項3】
前記任意の発振周波数に基づく合成周波数変換は,
前記一方のセンサからの入力信号SINθ1と、前記発信する制御信号cosθ2とを掛け算し,
前記掛け算して出力される出力信号を周波数フィルタを通して、高い周波数の信号のみ取り出すようにした
ものである請求項1に記載の信号処理方法。
【請求項4】
前記速度センサ若しくは加速度センサから検出される前記フローチューブに作用するコリオリの力に比例した振動周波数の入力信号は、
前記A/D変換においてサンプリングしてデジタル信号化が行われ,
前記発信する制御信号に基づいて合成周波数変換して得られる各々の変換合成周波数信号は,
合成した合成成分の和分または差分の成分の周波数が前記A/D変換時のサンプリング周波数の1/4になるように制御する
ものである請求項1に記載の信号処理方法。
【請求項5】
測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器と,
前記速度センサ若しくは加速度センサによって検出される入力周波数と、前記発信器の出力周波数FXを加算(又は減算)して周波数変換し、該周波数変換後の周波数値が常に一定になるように周波数シフトする周波数変換部と,
によって構成してなることを特徴とする信号処理装置。
【請求項6】
測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該少なくとも一本、若しくは一対のフローチューブを振動させて、振動検出センサである一対の速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器と,
前記一対の振動検出センサの一方のセンサを第1のA/Dコンバータによってデジタル信号に変換された該入力信号周波数と、前記発信器から出力される出力周波数とを加算(または減算)して該周波数変換後の周波数値が常に一定になるように周波数変換する第1の周波数変換部と,
前記一対の振動検出センサの他方のセンサを第2のA/Dコンバータによってデジタル信号に変換された該入力信号周波数と、前記発信器から出力される出力周波数とを加算(または減算)して該周波数変換後の周波数値が常に一定になるように周波数変換する第2の周波数変換部と,
によって構成したことを特徴とする信号処理装置。
【請求項7】
測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである一対の振動検出センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器と,
前記一対の振動検出センサの一方の速度センサを第1のA/Dコンバータによってデジタル信号に変換されて出力されてくる入力信号周波数を、前記発信器から出力される出力周波数を用いて、常に一定の周波数信号に周波数シフトして別の周波数帯域に移動する第1の周波数変換部と,
前記一対の振動検出センサの他方の速度センサを第2のA/Dコンバータによってデジタル信号に変換されて出力されてくる入力信号周波数を、前記発信器から出力される出力周波数を用いて、常に一定の周波数信号に周波数シフトして別の周波数帯域に移動する第2の周波数変換部と,
前記第1の周波数変換部から出力される一定の周波数信号に変換された第1の周波数信号の周波数を計測し、該計測した第1の周波数信号の周波数値を前記発信器に出力して、前記周波数変換部において周波数変換を行った後の周波数が、前記第1のA/Dコンバータによってデジタル信号に変換されて入力される一対の振動速度センサの一方の速度センサ信号の入力周波数を所望の周波数になるように第1及び第2の周波数変換部の出力周波数をコントロールする周波数計測部と,
によって構成したことを特徴とする信号処理装置。
【請求項8】
前記周波数変換部は,
前記発信器からの参照信号cosθ2と、前記第1のA/Dコンバータからの入力信号SINθ1を掛け算する掛け算器と,
前記掛け算器において掛け算して出力されてくる出力信号を周波数フィルタを通して、低い周波数の信号のみ取り出すローパスフィルタと,
によって構成したことを特徴とする請求項5,6又は7に記載の信号処理装置。
【請求項9】
前記周波数変換部は,
前記発信器からの参照信号cosθ2と、前記第1のA/Dコンバータからの入力信号SINθ1を掛け算する掛け算器と,
前記掛け算器において掛け算して出力されてくる出力信号を周波数フィルタを通して、高い周波数の信号のみ取り出すハイパスフィルタと,
によって構成したことを特徴とする請求項5,6又は7に記載の信号処理装置。
【請求項10】
前記周波数計測部は,
前記第1の周波数変換部に接続される掛け算器と、該掛け算器に接続されるローパスフィルタと、該ローパスフィルタに接続され、該ローパスフィルタからの出力信号を入力する周波数計測用発信器とからなり,
前記掛け算器は、前記第1の周波数変換部から出力される出力信号sin(θ+θXn)と、周波数計測用発信器から出力される出力信号cosδの位相を比較し、その差信号と和信号として後段のローパスフィルタに出力するもので,
前記ローパスフィルタは、前記掛け算器から出力される出力信号を周波数フィルタを通して、低い周波数の信号のみ取り出すもので,
該ローパスフィルタから出力される低い周波数の信号を基に基本出力波形の位相量Vが生成され、該位相量Vは前記周波数計測用発信器によって常に、
V=0
なる条件を満たす
ことを特徴とする請求項7,8又は9に記載の信号処理装置。
【請求項11】
前記第1のA/Dコンバータと前記第2のA/Dコンバータの出力の同期を取るクロックを設け,
前記第1のA/Dコンバータから出力される一対の振動検出センサのいずれか一方のデジタル信号と、前記第2のA/Dコンバータから出力される該振動検出センサの他方のデジタル信号との同期を取るようにしたことを特徴とする請求項7,8,9又は10に記載の信号処理装置。
【請求項12】
前記位相計測部の処理は,
DFT(Discrete Fourier Transform:離散フーリエ変換)又は、FFT(Fast Fourier Transform:高速フーリエ変換)である請求項7,8,9,10又は11に記載の信号処理装置。
【請求項13】
測定用の流管を構成する少なくとも一本、若しくは一対のフローチューブを駆動装置によって加振器を作動させ前記フローチューブを交番駆動し、該フローチューブを振動させて、振動検出センサである一対の速度センサ若しくは加速度センサによって前記フローチューブに作用するコリオリの力に比例した位相差及び/又は振動周波数を検出することにより、被計測流体の質量流量及び/又は密度を得るコリオリ流量計において,
可変調な周波数信号を発信出力する発信器と,
前記一対の振動検出センサの一方の速度センサを第1のA/Dコンバータによってデジタル信号に変換された該入力信号周波数θを、前記発信器から出力される出力周波数θXnを用いて、特定した一定周波数信号に周波数シフトして所望の周波数帯域に移動する第1の周波数変換部と,
前記一対の振動検出センサの他方の速度センサを第2のA/Dコンバータによってデジタル信号に変換された該入力信号周波数θを、前記発信器から出力される出力周波数θXnを用いて、特定した一定周波数信号に周波数シフトして所望の周波数帯域に移動する第2の周波数変換部と,
前記第1の周波数変換部から出力される一定の周波数信号に変換された第1の周波数信号の周波数を計測し、該計測した第1の周波数信号の周波数値を前記発信器に出力して、前記周波数変換部において、周波数変換後の周波数が、常に一定周波数となるように出力周波数をコントロールする周波数計測部と,
を設けたことを特徴とするコリオリ流量計。
【図1】

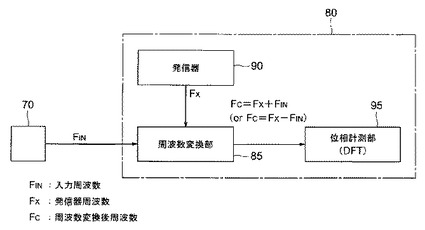
【図2】
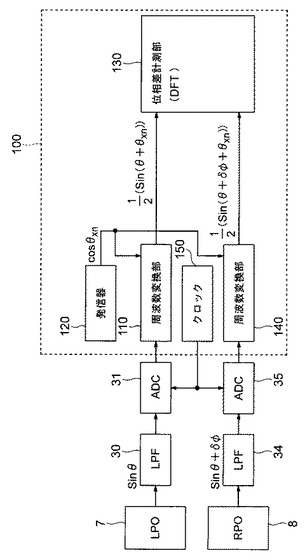
【図3】
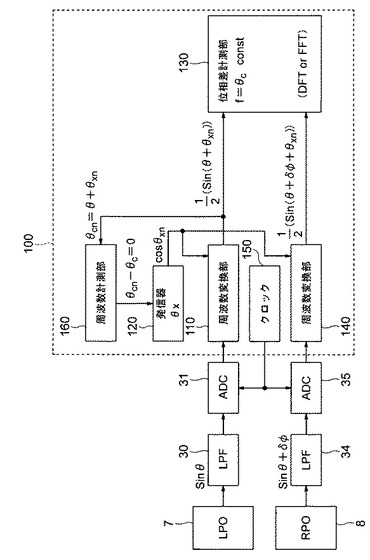
【図4】
【図5】
【図6】
【図7】
【図8】
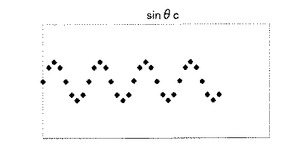
【図9】
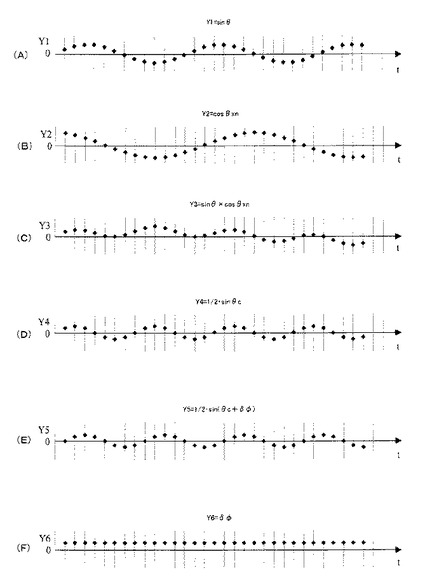
【図10】
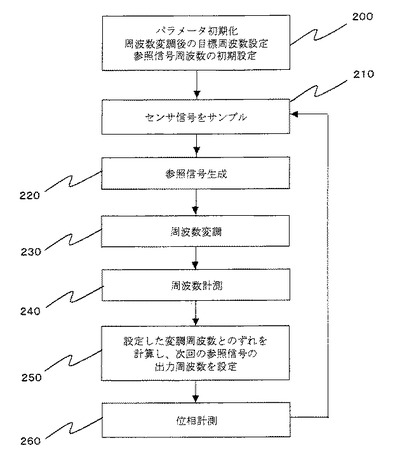
【図11】
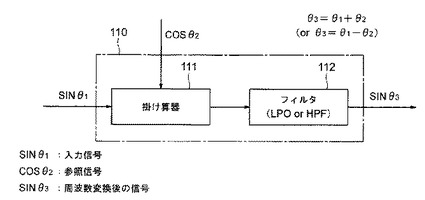
【図12】
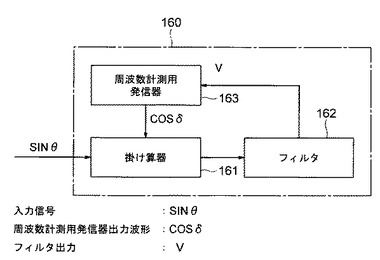
【図13】
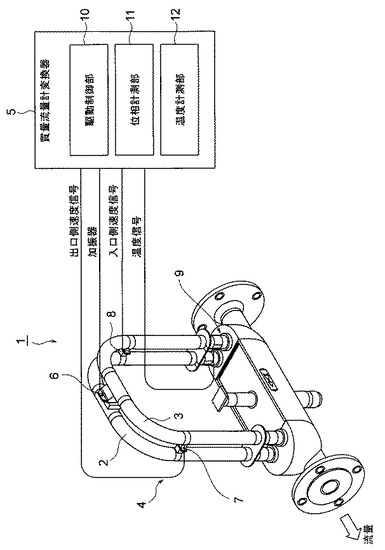
【図14】
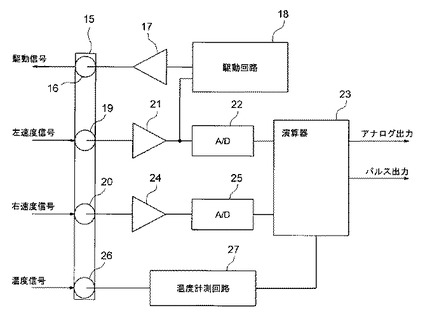
【図15】
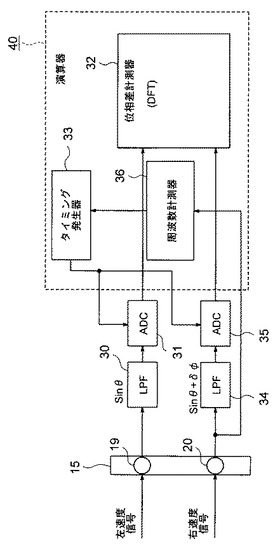
【図16】
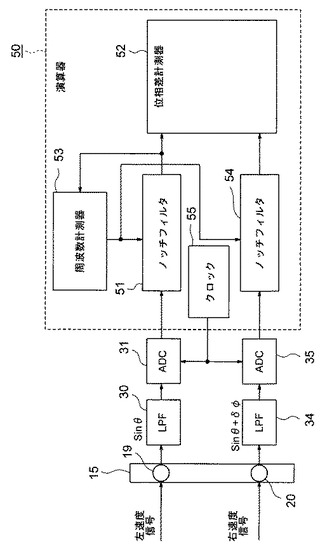
【図17】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2011−169797(P2011−169797A)
【公開日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願番号】特願2010−34760(P2010−34760)
【出願日】平成22年2月19日(2010.2.19)
【特許番号】特許第4694645号(P4694645)
【特許公報発行日】平成23年6月8日(2011.6.8)
【出願人】(000103574)株式会社オーバル (82)
【Fターム(参考)】
【公開日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願日】平成22年2月19日(2010.2.19)
【特許番号】特許第4694645号(P4694645)
【特許公報発行日】平成23年6月8日(2011.6.8)
【出願人】(000103574)株式会社オーバル (82)
【Fターム(参考)】
[ Back to top ]