
信号処理装置、レーダ装置、および、信号処理方法
【課題】送信波の出力時間を短縮化して物体の角度検出精度を向上させることを目的とする技術に関する。
【解決手段】
ビート信号をAD変換してデジタルデータを導出し、デジタルデータを複数のデータ群に分割する。次に、データ群を高速フーリエ変換してデータ群の数に対応する複数の変換データを取得し、変換データを複数の組に分けて組ごとの相関行列を取得して、相関行列を平均した値を算出する。そして、相関行列を平均した値に基づいて検知点の角度を演算する。これにより、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。
【解決手段】
ビート信号をAD変換してデジタルデータを導出し、デジタルデータを複数のデータ群に分割する。次に、データ群を高速フーリエ変換してデータ群の数に対応する複数の変換データを取得し、変換データを複数の組に分けて組ごとの相関行列を取得して、相関行列を平均した値を算出する。そして、相関行列を平均した値に基づいて検知点の角度を演算する。これにより、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体検出における信号処理に関する。
【背景技術】
【0002】
送信波が物体に反射した反射波を受信するレーダ装置がある。反射波を受信したレーダ装置は、送信波に対応する送信信号と、受信波に対応する受信信号との差分を示すビート信号を生成する。そして、レーダ装置の信号処理装置がビート信号を高速フーリエ変換して変換データを導出する。さらに、送信信号の周波数が上昇する第1期間と周波数が下降する第2期間のそれぞれの期間での変換データにおける所定の閾値を超えるレベルの信号(以下、「ピーク信号」という。)を信号処理装置が導出する。導出されたピーク信号を演算して、物体に係る検知点の位置等を算出する。
【0003】
なお、レーダ装置が複数のアレーアンテナを備えている場合は、DBF(Digital Beam Forming)、PRISM(Propagator method based on an Improved Spatial-smoothing Matrix)、MUSIC(Multiple Signal Classification)、および、ESPRIT(Estimation of Signal Parameters via Rotational Invariance Techniques)などのうちいずれかのアルゴリズムが検知点の角度を演算するときに用いられる。そして、上述のアルゴリズムのうち例えば、ESPRITを用いる場合は、検知点の角度算出に用いる相関行列の導出に空間平均法を用いるときがある。
【0004】
空間平均法は、複数のアレーアンテナのうち所定の数のアンテナの組み合わせであるサブアレーによる相関行列を複数生成し、当該複数の相関行例を足し合わせて平均を導出することで、受信信号の相互干渉成分を減少させ、所望波に対応する理想的な信号成分を導出する処理である。つまり、複数の受信アンテナで受信した受信信号を高速フーリエ変換して取得された複数の変換データに基づく複数の相関行列を足し合わせて、当該相関行列の平均の値を導出することで、相互干渉成分の影響が低減された信号が導出される。
【0005】
そして、送信信号の周波数が上昇する第1期間と周波数が下降する第2期間とを送信信号の1周期とした場合、送信信号の連続的な周期の数の増加に比例して生成される相関行列の数は増加し、空間平均法の処理に用いられる相関行列の数も増加する。そして、空間平均法の処理に用いられる相関行列の数が多ければ多いほど、受信信号の相互干渉成分の低減率も増加する。そのため、できるだけ連続的な周期の数を増やして相関行列を生成することが望ましい。つまり、送信信号に対応する送信波を連続的に出力する時間を増加させて、送信信号における各周期において相関行列を生成して、全ての相関行列を足し合わせて平均の値を導出する。これにより、受信信号の相互干渉成分はより大きく低減し、物体に係る複数の検知点のそれぞれの角度が精度よく正確に導出できる。なお、本発明と関連する技術を説明する資料としては特許文献1がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−25928号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、一のレーダ装置から送信波を連続的に送信する時間が増加すると、他のレーダ装置が一のレーダ装置からの送信波および反射波の少なくともいずれか一方を受信する可能性が高くなることがあった。このような場合には、他のレーダ装置が検知点の誤った位置を検出することがあった。
【0008】
さらに、レーダ装置から送信波を連続的に送信する時間が増加することに伴いレーダ装置内部の発熱量が増加する。これにより、レーダ装置を構成する部品への負荷を増加させる場合があった。そのため、送信波を連続的に出力する時間をできるだけ短くする、つまり、送信信号の連続的な周期の数を低減させる必要があった。しかし、送信波を連続的に出力する時間を短くすると、空間平均法の処理に用いる相関行列の数が減少し、複数の検知点のそれぞれの角度が正確に導出されない場合があった。
【0009】
本発明は、送信波の出力時間を短縮化して物体の角度検出精度を向上させることを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決するために、本発明は、物体に対応する検知点の角度を複数のアレーアンテナの受信信号に基づいて演算する信号処理装置であって、所定周期で周波数が変わる送信信号と、該送信信号に基づく送信波の前記検知点での反射波を受信した受信信号との差分によりビート信号を生成する生成手段と、前記ビート信号をAD変換してデジタルデータを導出する導出手段と、前記デジタルデータを複数のデータ群に分割する分割手段と、前記データ群を高速フーリエ変換して前記データ群の数に対応する複数の変換データを取得する取得手段と、前記変換データを複数の組に分けて前記組ごとの相関行列を取得して、前記相関行列を平均した値を算出する算出手段と、前記相関行列を平均した値に基づいて前記検知点の角度を演算する演算手段と、を備える。
【0011】
また、本発明の信号処理装置の分割手段は、前記デジタルデータを所定のデータ数ごとの複数のデータ群に分割する。
【0012】
また、本発明の信号処理装置の分割手段は、前記送信信号の周波数が上昇する第1期間と、前記送信信号の周波数が下降する第2期間のそれぞれの期間の中で分割する。
【0013】
また、本発明は信号処理装置と、前記送信波を送信する送信手段と、前記反射波を受信する受信手段と、前記信号処理装置で検出した検知点の情報を車両の各部を制御する車両制御装置に出力する。
【0014】
また、本発明は、物体に対応する検知点の角度を複数のアレーアンテナの受信信号に基づいて演算する信号処理方法であって、所定周期で周波数が変わる送信信号と、該送信信号に基づく送信波の前記検知点での反射波を受信した受信信号との差分によりビート信号を生成する工程と、前記ビート信号をAD変換してデジタルデータを導出する工程と、前記デジタルデータを複数のデータ群に分割する工程と、前記データ群を高速フーリエ変換して前記データ群の数に対応した複数の変換データを取得する工程と、前記変換データを複数の組に分けて前記組ごとの相関行列を取得して、前記相関行列を平均した値を算出する工程と、前記相関行列を平均した値に基づいて前記検知点の角度を演算する工程と、を備える。
【発明の効果】
【0015】
本発明によれば、デジタルデータを複数のデータ群に分割して変換データの数を増やすことで、送信波の送信時間が減少した場合でも変換データ数の減少を防ぎ、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。
【0016】
また、本発明によれば、分割手段がデジタルデータを所定のデータ数ごとの複数のデータ群に分割することで、デジタルデータの数を同数とする複数のデータ群を得ることができ、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。
【0017】
また、本発明によれば、分割手段は、送信信号の周波数が上昇する第1期間と、送信信号の周波数が下降する第2期間のそれぞれの期間の中で分割することで、第1期間および第2期間のそれぞれのデータ群の数を増加させて、検知点に対応する複数の物体のそれぞれの角度を精度よく導出できる。
【0018】
さらに、本発明によれば、信号処理装置で検出した検知点の情報を車両の各部を制御する車両制御装置に出力することで、検知点に対応した物体の位置等に応じた車両制御を行える。
【図面の簡単な説明】
【0019】
【図1】図1は、レーダ装置のブロック図である。
【図2】図2は、FM−CW方式信号を示す図である。
【図3】図3は、信号処理装置における角度演算を詳細に説明する図である。
【図4】図4は、UP区間の変換データを詳細に説明する図である。
【図5】図5は、DOWN区間の変換データを詳細に説明する図である。
【図6】図6は、物体に係る検知点の角度スペクトラムを示す図である。
【図7】図7は、レーダ装置の処理について説明するフローチャートである。
【図8】図8は、レーダ装置の処理について説明するフローチャートである。
【発明を実施するための形態】
【0020】
以下、図面を参照しつつ本発明の実施の形態について説明する。以下に示す実施の形態は例示であり、本願発明の技術的範囲をこれらに限定するものではない。
【0021】
<第1の実施の形態>
<1.ブロック図>
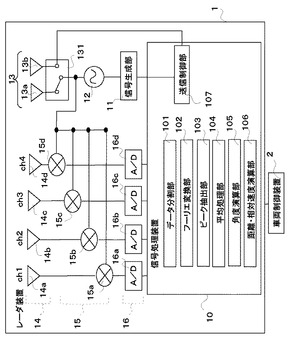
図1は、レーダ装置1のブロック図である。レーダ装置1は、車両の周辺の他の車両などの物体に係る検知点を検出する。検知点の検出結果は、車両の各部に制御信号を出力する車両制御装置2に送信されて、アクセル開度の調整、および、車両のユーザが装着するシートベルトの引き締めなどの車両の制御に用いられる。
【0022】
レーダ装置1は、信号処理装置10、信号生成部11、発振器12、送信アンテナ13、受信アンテナ14、ミキサ15、および、AD(Analog to Digital)変換器16を主に備えている。
【0023】
信号処理装置10は、レーダ装置1が受信した受信信号に基づいて、物体に係る検知点の位置等を検出する。信号処理装置10の詳細な処理については、後述する。
【0024】
信号生成部11は、後述する送信制御部107の指示信号に基づいて、三角波状に電圧が変化する変調信号を生成する。
【0025】
発振器12は、信号生成部11で生成された変調信号に基づき所定の周波数帯の信号(例えば、76.5GHz)を周波数変調し、送信信号として送信アンテナ13に出力する。
【0026】
送信アンテナ13は、送信信号に対応する送信波を車両外部に出力する。本実施の形態のレーダ装置1は送信アンテナ13a、および、送信アンテナ13bの2本の送信アンテナを有している。送信アンテナ13a、および、13bは、切替部131のスイッチングにより所定の周期で切替られ、発振器12と接続された送信アンテナ13から送信波が連続的に車両外部に出力される。
【0027】
切替部131は、発振器12と送信アンテナ13との接続を切替えるスイッチであり、送信制御部107の指示信号により送信アンテナ13a、および、送信アンテナ13bのいずれかの送信アンテナと発振器12とを接続する。
【0028】
受信アンテナ14は、送信アンテナ13から連続的に送信された送信波が物体に反射した反射波を受信する複数のアレーアンテナである。本実施の形態では、受信アンテナ14a(ch1)、14b(ch2)、14c(ch3)、および、14d(ch4)の4本の受信アンテナを備えている。なお、受信アンテナ14a〜14dのそれぞれのアンテナは等間隔に配置されている。
【0029】
ミキサ15は、各受信アンテナごとに設けられている。ミキサ15は、受信信号と送信信号とを混合する。そして、受信信号と送信信号との混合により送信信号と受信信号との差分のビート信号が生成されて、AD変換器16に出力される。
【0030】
AD変換器16は、アナログ信号であるビート信号を所定周期でサンプリングして、複数のサンプリングデータを導出する。そして、サンプリングされたデータを量子化し、アナログデータのビート信号をデジタルデータに変換し、当該デジタルデータを信号処理装置10に出力する。なお、AD変換器16もミキサ15と同様に各受信アンテナごとに設けられている。
【0031】
信号処理装置10は、データ分割部101、フーリエ変換部102、ピーク抽出部103、平均処理部104、角度演算部105、距離・相対速度演算部106、および、送信制御部107の機能を主に備えている。以下、各機能について説明する。
【0032】
データ分割部101は、AD変換器16から出力されたデジタルデータを複数のデータ群に分割する。例えば、ビート信号をAD変換して取得されるデジタルデータが2500個の場合に、1250個のデジタルデータを有する2つのデータ群にデータ分割部101が分割する。なお、データ分割部101によるデータ分割は、各受信アンテナごとに行われる。そのため、上述のように1つの受信アンテナのビート信号をAD変換して、2500個のデジタルデータを2つのデータ群に分割する場合に、4本の受信アンテナが存在するときは、各受信アンテナのデータ群を合計すると8つのデータ群が当該処理により取得される。なお、データ分割部101の詳細な処理については後述する。
【0033】
フーリエ変換部102は、分割したデータ群のそれぞれに対して高速フーリエ変換処理を行う。これにより、周波数を基準とした信号レベルを示す複数の変換データが取得される。つまり、データ群の数が8つの場合は8つの変換データが取得される。
【0034】
ピーク抽出部103は、各変換データの信号のうち信号レベルが所定の閾値を超える信号(以下、「ピーク信号」という。)を抽出する。
【0035】
平均処理部104は、複数の変換データを複数の組に分けて、組ごとの相関行列を取得する。詳細には、平均処理部104は、複数の変換データのうち一の変換データごとの対応するピーク信号を複数の組に分けて、組ごとの相関行列を取得する。ここで、対応するピーク信号とは、一の変換データのピーク信号と他の変換データのピーク信号のうち、ピーク信号の周波数および信号レベルが略同じ値を示すピーク信号である。つまり、同一の検知点からの反射波を複数の受信アンテナ14で受信することで、周波数および信号レベルが略同一で、アンテナ間隔に応じて異なる位相を有するピーク信号が各変換データごとに存在し、当該ピーク信号が対応するピーク信号となる。
【0036】
そして、組ごとの相関行列を取得した後に、各組の相関行列を足し合わせて平均した値を導出する。なお、組ごとの相関行列を足し合わせて平均した値は次の数式で求められる。また、数式の、Rnxxは変換データの第n組の相関行列、znは各相関行列に対する重み付けを示す。
【0037】
【数1】

角度演算部105は、平均処理部104で導出された相関行列を平均した値に基づいて物体に係る検知点の角度を演算する。角度の演算は、例えばESPRITなどのアルゴリズムが用いられ、平均処理部104で導出された相関行列の平均の値の固有値、および、固有ベクトルに基づいて検知点の角度が演算される。これにより、検知点に対応する物体の角度を精度よく検出できる。
【0038】
距離・相対速度演算部106は、変換データ中のピーク周波数に基づいて検知点とレーダ装置1を搭載した車両との距離、および、検知点とレーダ装置1を搭載した車両との相対速度の情報を演算する。ここで、距離は次の(1)式、相対速度は次の(2)式により求められる。また、Rは距離、fupは周波数が上昇する区間における複数の変換データのピーク信号を平均した周波数、fdnは周波数が下降する区間における複数の変換データのピーク信号を平均した周波数、ΔFは送信波の変調幅(例えば、200MHz)、fmは変調周波数、f0は中心周波数(例えば、76.5GHz)、cは送信波の伝搬速度である。
【0039】
【数2】
また、相対速度は次の数式により導出され、Vは相対速度を示す。
【0040】
【数3】
なお、距離・相対速度演算部106の詳細な処理については後述する。
【0041】
送信制御部107は、信号生成部11に変調信号を生成する指示信号を出力する。つまり、後述する図2に示す送信信号TXの送信タイミングを制御する。また、送信制御部107は、切替部131の送信アンテナ13の切替を制御する。つまり、発振器12から出力される送信信号を送信波として送信アンテナ13aおよび13bのうちのいずれの送信アンテナから車両外部に送信するかを決定する。
【0042】
<2.FM−CWの信号処理>
次に、物体検出の信号処理の一例としてFM−CW(Frequency Modulated Continuous Wave)方式における信号処理について説明する。なお、本実施形態では、FM−CWの方式を例に説明を行うが、周波数が上昇する区間と周波数が下降する区間のような複数の区間を組み合わせて物体の位置等を検出する方式であれば、FM−CW方式に限定されない。
【0043】
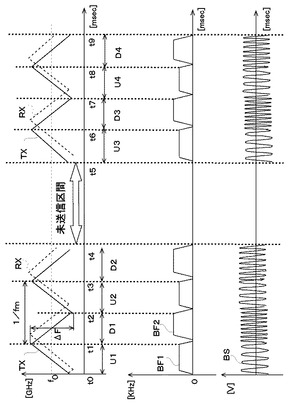
図2はFM−CW方式の信号を示す図である。図2の上段の図はFM−CW方式の送信信号TX、および、受信信号RXの信号波形を示す図である。また、図2の中段の図は送信信号TXと受信信号RXとの差分により生じるビート周波数を示す図である。さらに、図2の下段の図はビート周波数に対応するビート信号を示す図である。
【0044】
図2上段の図は、縦軸が周波数[GHz]、横軸が時間[msec]を示す図である。図中の送信信号TXは、中心周波数をf0(例えば、76.5GHz)として、所定周波数(例えば76.6GHz)まで上昇した後に所定周波数(例えば、76.4GHz)まで下降をするように200MHzの間で一定の変化を繰り返す。このように所定周波数まで周波数が上昇する区間(以下、「UP区間」ともいい、例えば、図2に示す、区間U1、U2、U3、および、U4がUP区間に該当する。)と、所定周波数まで上昇した後に所定の周波数まで下降する区間(以下、「DOWN区間」ともいい、例えば、区間D1、D2、D3、および、D4がDOWN区間に該当する。)がある。
【0045】
なお、本実施の形態のレーダ装置1では、送信アンテナ13から出力される送信波は、一のUP区間である区間U1と一のDOWN区間である区間D1の組み合わせを送信信号TXの1周期として、送信信号TXの2周期分に相当する送信波を車両外部に送信する。
【0046】
また、送信信号TXに対応する送信波の出力については、送信アンテナ13からの送信波の出力を所定時間の間、中止する未送信区間を設けている。つまり、1周期分の送信信号TXに対応する送信波を連続的に車両外部に出力することで、合計2周期分の送信信号TXに対応する送信波を車両外部に出力する。そして、未送信区間に対応する時間が経過した後に、再び2周期分の送信信号TXに対応する送信波を車両外部に出力する。これにより、例えば、4周期分の送信信号TXに対応する送信波を送信することと比べると、レーダ装置1から車両外部へ送信波を出力する時間を短縮でき、他のレーダ装置に対する影響を低減できる。
【0047】
しかし、ESPRITなどのアルゴリズムを用いて物体に係る検知点の角度を算出する場合に、4周期分の送信信号TXに対応する送信波を車両外部に出力する場合と比べると、2周期分の送信信号TXに対応する送信波を出力することは、空間平均法を用いて相関行列の平均を導出することによる相互干渉成分の低減率は低くなる。
【0048】
そのため、以下の<3.信号処理装置の詳細処理>において説明するように、送信波を出力する時間を変えずに(送信信号TXの周期を2周期としたままで)、AD変換器16により変換されたデジタルデータを複数のデータ群に分割して空間平均法に用いる変換データの数を増加させる。これにより、2周期分の送信信号TXに対応する送信波を出力する場合に、空間平均法を用いて相関行列の平均を導出することによる相互干渉成分の低減の効果は、4周期分の送信信号TXに対応する送信波を出力する場合と略同じ効果となる。
【0049】
なお、送信波の車両外部への出力は、送信アンテナ13を切替えて送信する。例えば、送信アンテナ13aから2周期分の送信信号のうち最初の1周期の送信信号に対応する送信波が送信された後に、送信制御部107の指示信号により切替部131が発振器12と接続されるアンテナを送信アンテナが13aから送信アンテナ13bに切り替えて、2周期分のうちの残りの1周期の送信信号に対応する送信波を送信アンテナ13bから送信する。
【0050】
また、送信アンテナ13から送信された送信波が物体にあたって反射波として受信アンテナ14に受信されると、受信アンテナ14を介して受信信号RXとしてミキサ15に入力される。さらに、受信信号RXについても送信信号TXと同じように所定周波数まで周波数が上昇する区間と、所定周波数まで周波数が下降する区間とが存在する。
【0051】
また、レーダ装置1を搭載した車両と物体に係る検知点との距離に応じて、送信信号に比べて受信信号に時間的な遅れが生じる。さらに、レーダ装置1を搭載した車両に対する物体間に速度差を有する場合は、送信信号に対して受信信号にドップラーシフト分の差が生じる。
【0052】
図2中段の図は縦軸が周波数[kHz]、横軸が時間[msec]を示す図であり、図中にはUP区間およびDOWN区間の送信信号と受信信号との差を示すビート周波数が示されている。例えば、区間U1ではビート周波数BF1が導出され、区間D1ではビート周波数BF2が導出されている。このように各区間において、ビート周波数が導出される。
【0053】
図2の下段の図は、縦軸が振幅[V]、横軸が時間[msec]を示す図である。図中には、ビート周波数に対応するアナログ信号のビート信号BSが示されており、当該ビート信号BSがAD変換器16によりデジタルデータに変換される。なお、図2では一の検知点から受信した場合のビート信号BSが示されているが、送信信号TXに対応する送信波が複数の検知点に反射し、複数の反射波として受信アンテナ14に受信された場合は、受信信号RXは複数の反射波が合成されたものとなり、送信信号TXとの差分を示すビート信号BSも複数の反射波が合成されたものとなる。
【0054】
<3.信号処理装置の詳細処理>
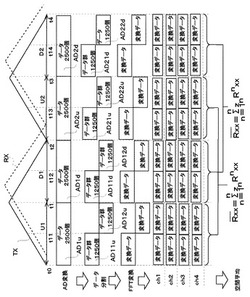
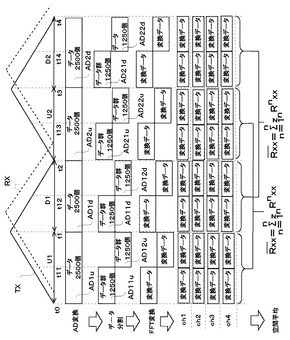
図3は、信号処理装置10における角度演算を詳細に説明する図である。図3には、送信信号TXのUP区間およびDOWN区間の組み合わせが2周期分示されており、2周期分の送信信号TXに対応する送信波が送信アンテナ13から送信される。そして、送信波が物体に反射して反射波として受信された受信信号RXが示されている。また、送信信号TXと受信信号RXとの差分であるビート信号をAD変換器16がデジタルデータに変換する。
【0055】
図3を用いて具体的に説明すると、送信信号TXの第1周期のUP区間(区間U1)に対応する時間(時間t0〜t1)のビート信号をAD変換器16で変換したデータであるデジタルデータAD1uのデータ数が2500個となる。そして、第1周期のDOWN区間(区間D1)に対応する時間(時間t1〜t2)のデジタルデータAD1dのデータ数が2500個となる。さらに、第2周期のUP区間(区間U2)に対応する時間(時間t2〜t3)のデジタルデータAD2u、および、第2周期のDOWN区間(区間D2)に対応する時間(時間t3〜t4)のデジタルデータAD2dのデータ数もそれぞれ2500個となっている。このようなデータ数の取得は、UP区間(DOWN区間)に対応する時間でのサンプリング周期を予め所定のサンプリング周期に定めることで実現される。
【0056】
次に、UP区間とDOWN区間のそれぞれの区間の中でAD変換したデジタルデータをデータ分割部101が複数のデータ群に分割する。つまり、4つの区間(区間U1、D1、U2、D2)のそれぞれの区間おいてAD変換したデジタルデータ(デジタルデータAD1u、AD1d、AD2u、AD2d)をデータ分割部101が複数のデータ群に分割する。具体的には、時間t0〜t1に対応する区間U1の2500個のデジタルデータAD1uを時間t0〜t1に対して半分の時間である時間t0〜t11に対応するデータ群AD11uとしてデータ分割部101が分割する。つまり、2500個のデジタルデータを所定のデータ数(例えば、本実施の形態では2500個の半分のデータ数である1250個)のデジタルデータにデータ分割部101が分割する。
【0057】
そして、分割の結果、時間t0〜t11に対応するデータ数1250個のデータ群AD11uと、時間t11〜t1に対応するデータ数1250個のデータ群AD12uとが導出される。これにより、デジタルデータの数を同数とする複数のデータ群を得ることができ、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。
【0058】
同様に、時間t1〜t2に対応する区間D1のデータ数2500個のデジタルデータAD1dを時間t1〜t12に対応するデータ数1250個のデータ群AD11dと、時間t12〜t2に対応するデータ数1250個のデータ群AD12dとにデータ分割部101が分割する。
【0059】
また、時間t2〜t3に対応する区間U2のデータ数2500個のデジタルデータAD2uを時間t2〜t13に対応するデータ数1250個のデータ群AD21uと、時間t13〜t3に対応するデータ数1250個のデータ群AD22uとにデータ分割部101が分割する。
【0060】
さらに、時間t3〜t4に対応する区間D2のデータ数2500個のデジタルデータAD2dを時間t3〜t14に対応するデータ数1250個のデータ群AD21dと、時間t14〜t4に対応するデータ数1250個のデータ群AD22dとにデータ分割部101が分割する。このようにデジタルデータを所定のデータ数ごとの複数のデータ群に分割することで、受信アンテナ数を増加させることなく、複数のデータ群を取得できる。また、検知点に対応する複数の物体のそれぞれの角度を精度よく導出できる。
【0061】
次にデジタルデータを分割した8個のデータ群(データ群AD11u、AD12u、AD11d、AD12d、AD21u、AD22u、AD21d、AD22d)のぞれぞれのデータ群に対してフーリエ変換部102が高速フーリエ変換処理を行い、8個のデータ群の数に対応した8個の変換データを取得する。
【0062】
なお、データ群の数は受信アンテナの数に比例した数となる。つまり、これまで説明した8個のデータ群は例えば、受信アンテナ14a(ch1)の2周期分の送信信号に対応するビート信号をAD変換器16aを用いてAD変換し、当該AD変換したデジタルデータを複数のデータ群に分割したデータ群の数である。
【0063】
そして、本実施の形態のレーダ装置1は受信アンテナ14a(ch1)、14b(ch2)、14c(ch3)、14d(ch4)の4本の受信アンテナを備えている。つまり、受信アンテナ1本に対して8個のデータ群を取得でき、4本の受信アンテナがレーダ装置1に備えられているので、取得できるデータ群の合計は32個となる。その結果、フーリエ変換部102により得られる変換データは、32個のデータ群の数に対応する32個の変換データ(図3に示すch1〜ch4の変換データ)となる。
【0064】
次に、これらの32個の変換データのうち、UP区間(区間U1およびU2)に含まれる変換データ(変換データ数16個)から一のピーク信号(例えば、ピーク信号Pu1)の属する周波数fu1と略同じ周波数のピーク信号(例えば、図4に示す変換データFT1u〜FT16uのピーク信号Pu1〜Pu16)をピーク抽出部103が抽出する。
【0065】
ここで、ある検知点からの反射波はほぼ同時期に各受信アンテナで受信されるため、各受信アンテナの受信信号RXに含まれる検知点の周波数情報はほぼ等しい(ただし、位相情報は異なる)。即ち、高速フーリエ変換を行った周波数スペクトラム上でのピーク信号は各受信信号RXに対してほぼ等しい周波数の位置に現れる。したがって、同じ検知点からの反射波に基づく情報として周波数fu1のピーク信号Pu1〜Pu16をピーク抽出部103が抽出する。なお、異なる周波数(周波数fu2)における各ピーク信号についても同様にピーク抽出部103が抽出する。
【0066】
そして、平均処理部104が16個の変換データを並べたときの隣り合う3つの変換データのピーク信号を1組とした14組の相関行列(例えば図4に示す相関行列R1xx〜R14xx)を演算し、演算した14組の相関行列を足し合わせた平均の値を空間平均法を用いて導出する。
【0067】
また、32個の変換データのうち、DOWN区間(区間D1およびD2)に含まれる変換データ(変換データ数16個)から一のピーク信号(例えば、ピーク信号Pd1)の属する周波数fd1と略同じ周波数のピーク信号(例えば、図5に示す変換データFT1d〜FT16dのピーク信号Pd1〜Pd16)をピーク抽出部103が抽出する。なお、異なる周波数(周波数fd2)における各ピーク信号についても同様にピーク抽出部103が抽出する。
そして、平均処理部104が16個の変換データを並べたときの隣り合う3つの変換データのピーク信号を1組とした14組の相関行列(例えば図5に示す相関行列R21xx〜R34xx)を演算し、演算した14組の相関行列を足し合わせた平均の値を空間平均法を用いて算出する。
【0068】
図4は、UP区間である区間U1およびU2に対応する変換データを詳細に説明する図である。図4に示す変換データFT1u〜FT16uは上述の32個の変換データのうちのUP区間に含まれる変換データであり、各変換データの縦軸が信号レベル[dBv]、横軸が周波数[kHz]を示している。各変換データには複数のピーク信号が存在する。そして、各変換データではピーク抽出部103が所定の閾値を超え、略同じ周波数の信号であるピーク信号Pu1〜Pu16を抽出する。なお、これらのピーク信号(ピーク信号Pu1〜PU16)は、同一の検知点に基づく対応するピーク信号である。
【0069】
次に、変換データごとの対応するピーク信号を複数の組に分けて組ごとの相関行列を取得する。つまり、変換データFT1u、FT2u、FT3uの3つの変換データを1組としてそれぞれの変換データごとの対応するピーク信号であるピーク信号Pu1、Pu2、および、Pu3の相関行列R1xxを平均処理部104が導出する。
【0070】
そして、変換データを1つずらして、変換データFTu2、FT3u、FT4uの3つの変換データごとの対応するピーク信号を1組とする相関行列R2xxを平均処理部104が導出する。このように3つの変換データごとの対応するピーク信号を1組とする14組の相関行列(相関行列R1xx〜R14xx)を平均処理部104が生成し、当該14組の相関行列を平均した値を平均処理部104が算出する。
【0071】
図5は、DOWN区間である区間D1およびD2に対応する変換データを詳細に説明する図である。図5に示す変換データFT1d〜FT16dは上述の32個の変換データのうちのDOWN区間に含まれる変換データであり、各変換データの縦軸が信号レベル[dBv]、横軸が周波数[kHz]を示している。各変換データには複数のピーク信号が存在する。そして、各変換データではピーク抽出部103が所定の閾値を超え、ほぼ同じ周波数の信号であるピーク信号Pd1〜Pd16を抽出する。
【0072】
そして、変換データを複数の組に分けて組ごとの相関行列を取得する。つまり、変換データFT1d、FT2d、FT3dの3つの変換データごとの対応するピーク信号を1組とする相関行列R21xxを平均処理部104が導出する。次に変換データを1つずらして、変換データFTu2、FT3u、FT4uの3つの変換データごとの対応するピーク信号を1組とする相関行列R22xxを平均処理部104が導出する。このように3つの変換データごとの対応するピーク信号を1組とする14組の相関行列(相関行列R21xx〜R34xx)を平均処理部104が生成し、当該14組の相関行列を平均した値を平均処理部104が算出する。このようにして得られた相関行列を平均した値の固有値、および、固有ベクトルに基づいて、以下の<4.角度スペクトラム>で詳細に説明するように角度演算部105が検知点の角度を導出する。これにより、送信波の送信時間が減少した場合でも変換データ数の減少を防ぎ、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。なお、各変換データに存在する他の周波数ピークについても同様の処理が行われる。
【0073】
<4.角度スペクトラム>
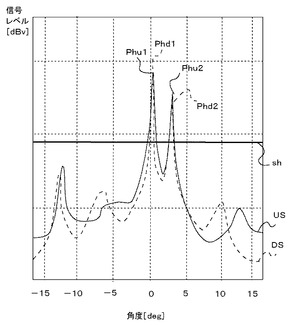
図6は、物体に係る検知点の角度スペクトラムを示す図である。スペクトラムUSはUP区間における検知点の角度を示すものであり、閾値shを超えた信号である角度ピークPhu1、および、角度ピークPhu2は図4で説明したピーク周波数fu1におけるピーク信号Pu1〜Pu16に基づいて生成された14組の相関行列を平均した値の固有値、および、固有ベクトルから導出された検知点の角度を示す。即ち、ピーク周波数fu1のピーク信号の情報から2つの検知点の角度情報に分離したことを示す。
【0074】
ここで、変換データにおける一のピーク信号は、一の検知点からの反射波に基づく場合以外に、複数の検知点からの反射波に基づく場合がある。つまり、レーダ装置を搭載した車両に対する複数の検知点のそれぞれの角度の値が異なる場合で、レーダ装置を搭載した車両に対する複数の検知点のそれぞれの距離の値が同じ場合は、一のピーク信号に複数の検知点の情報が含まれている場合がある。
【0075】
そのため、図6のスペクトラムUSに示されるように角度ピークPhu1、および、Phu2の2つの角度ピークが存在する場合は、図4の変換データのピーク信号(ピーク信号Pu1〜Pu16)に角度ピークPhu1、および、Phu2に対応する2つの検知点の情報が含まれることを示している。
【0076】
また、スペクトラムDSはDOWN区間における検知点の角度を示すものであり、閾値shを超えた信号である角度ピークPhd1、および、角度ピークPhd2は図5で説明したピーク周波数fd1におけるピーク信号Pd1〜Pd16により生成14組の相関行列の平均した値の固有値、および、固有ベクトルから導出された検知点の角度を示す。
【0077】
図6のスペクトラムDSに示されるように角度ピークPhd1、および、Phd2の2つの角度ピークが存在する場合は、図5の変換データのピーク信号(ピーク信号Pd1〜Pd16)に角度ピークPhd1、および、Phd2に対応する2つの検知点の情報が含まれていることを示している。
【0078】
そして、UP区間の角度スペクトラムUSと、DOWN区間の角度スペクトラムDSとを信号レベルおよび角度に基づきペアリングする。図6では角度ピークPhu1およびPhd1は信号レベル、および、角度が略同一のピークであるため、角度ピークPhu1とPhd1がペアリングされる。また、角度ピークPhu2およびPhd2とは信号レベル,および,角度が略同一のピークであるため、角度ピークPhu2とPhd2がペアリングされる。そのため次の数式4により2つの角度ピークの平均を導出して、2つの検知点のそれぞれの角度を角度演算部105が演算する。これによりレーダ装置1を搭載した車両から略同じ距離に存在する複数の検知点(例えば、一の検知点と他の検知点)のそれぞれの角度を正確に取得できる。なお、数式のθmは検知点の角度を示し、θupは角度ピークphu1(phu2)に対応する角度を示す。また、θdnは角度ピークphd1(phd2)に対応する角度を示す。
【0079】
【数4】
また、図6に示す角度スペクトラムUS(DS)では複数の角度ピークが導出されている。変換データの一のピーク信号に複数の検知点の情報が含まれている場合に、デジタルデータのデータ群の数が少ないと、相関行列の数が少なくなり当該相関行列を用いて処理する空間平均法による相互干渉成分の低下率が下がる。その結果、複数の角度ピークが1つの角度ピークに合成され、検知点の角度を誤って算出する可能性がある。
【0080】
そのため、デジタルデータをデータ分割部101が分割してデータ群の数を増加させることで、相関行列の数が増加し、当該相関行列を用いて処理する空間平均法による相互干渉成分の低下率が高まる。そして、空間平均法により導出された相関行列の平均の値を用いて導出する固有値および固有ベクトルにより角度演算部105が検知点の角度を導出することで、変換データの一のピークに含まれる検知点の数に応じた角度ピークが導出される。これにより、複数の検知点の角度をそれぞれ正確に算出できる。
【0081】
検知点の角度を算出した後、距離・相対速度演算部106が各検知点について距離、相対速度を算出する。図6において、一の検知点のUP区間の角度ピークPhu1の周波数は図4に示す周波数fu1である。また、DOWN区間の角度ピークPhd1の周波数は図5に示す周波数fd1である。これらの周波数fu1、および、fd1の値を用いて、数2、および、数3により一の検知点の距離および相対速度を算出する。
【0082】
また、図6において他の検知点のUP区間の角度ピークPhu2の周波数は一の検知点と同じく周波数fu1であり、DOWN区間の角度ピークPhd2の周波数は一の検知点と同じく周波数fd1である。そして、これらの周波数fu1、および、fd1の値を用いて、数2、および、数3により他の検知点の距離および相対速度を算出する。これにより物体の位置および相対速度を精度よく導出できる。
【0083】
<5.処理フローチャート>
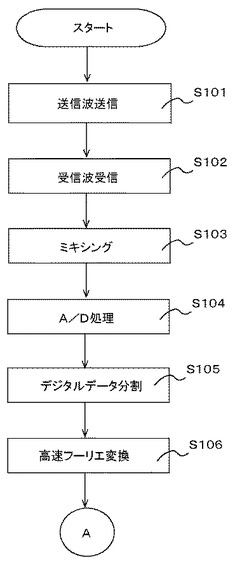
図7および図8はレーダ装置1の処理について説明するフローチャートである。ステップS101では、発振器12から出力された送信信号に対応する送信波を送信アンテナ13が車両外部に出力して、ステップS102の処理に進む。
【0084】
なお、送信アンテナ13からの送信波は送信信号TXにおける一のUP区間および一のDOWN区間を1周期とした場合に、1周期目に対応する送信波を一方の送信アンテナ13aから車両外部に出力し、2周期目に対応する送信波を他方の送信アンテナである送信アンテナ13bから車両外部に出力する。なお、2周期経過後は、所定期間送信波を車両外部に送信しない未送信区間を設けており、当該未送信区間に対応する時間が経過した後は、再び2周期分の送信信号TXに対応する送信波を車両外部に出力する。
【0085】
ステップS102では、送信波が物体に反射した反射波を受信アンテナ14が受信して、ステップS103の処理に進む。
【0086】
ステップS103では、受信アンテナ14で受信した反射波に対応する受信信号RXと送信信号TXとをミキサ15が混合し、送信信号TXと受信信号RXとの差分であるビート信号BSを生成してステップS104の処理に進む。
【0087】
ステップS104では、アナログ信号であるビート信号BSをAD変換器16がAD変換を行い、デジタルデータに変換してステップS105の処理に進む。
【0088】
ステップS105では、AD変換器16から出力されたデジタルデータをデータ分割部101が複数のデータ群に分割してステップS106の処理に進む。
【0089】
ステップS106では、分割した複数のデータ群のそれぞれに対してフーリエ変換部102が高速フーリエ変換処理を行って変換データを生成して、ステップS107の処理に進む。
【0090】
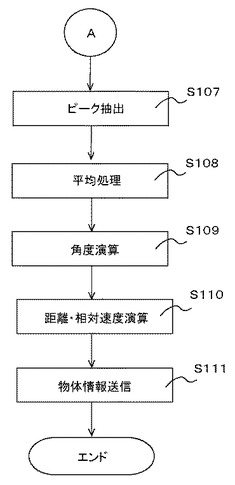
図8に示すステップS107では、高速フーリエ変換した変換データの信号のうち所定の閾値を超えるピーク信号をピーク抽出部103が抽出して、ステップS108の処理に進む。
【0091】
ステップS108では、UP区間およびDOWN区間のそれぞれの区間において、変換データごとの対応するピーク信号を複数の組に分けて組ごとの相関行列を平均処理部104が取得して、各組の相関行列を足し合わせて平均した値を平均処理部104が導出してステップS109の処理に進む。
【0092】
ステップS109では、平均処理部104で導出された相関行列を平均した値の固有値、および、固有ベクトルに基づいて物体に係る検知点の角度を演算して、ステップS110の処理に進む。
【0093】
ステップS110では、ステップS109で角度分離された各検知点について、変換データ中のピーク周波数に基づいて検知点とレーダ装置1を搭載した車両との距離、および、検知点とレーダ装置1を搭載した車両との相対速度を距離・相対速度演算部106が演算して、ステップS111の処理に進む。
【0094】
ステップS111では、物体に係る検知点の情報(距離、相対速度、角度)が車両の各部に制御信号を出力する車両制御装置2に出力される。これにより、検知点に対応する物体の位置等に応じた車両制御を行うことができる。
【0095】
<変形例>
以上、本発明の実施の形態について説明してきたが、この発明は上記実施の形態に限定されるものではなく様々な変形が可能である。以下では、このような変形例について説明する。なお、上記実施の形態で説明した形態、および、以下で説明する形態を含む全ての形態は、適宜に組み合わせ可能である。
【0096】
上記実施の形態において、レーダ装置1は、車両に搭載する以外の各種用途(例えば、飛行中の航空機および航行中の船舶の監視の少なくともいずれか1つ)に用いてもよい。
【0097】
また、上記実施の形態において、送信アンテナを2本、受信アンテナを4本として説明しているが、各アンテナの本数がこれ以外の本数でもよく、例えば、送信アンテナが1本、受信アンテナが5本であってもよい。
【0098】
また、上記実施の形態において、レーダ装置1は、受信アンテナ14と送信アンテナ13とをそれぞれ独立に設けているが、受信アンテナが送信アンテナを兼ねるようにしてもよい。この場合、各アンテナは送信波を送信した直後に受信状態に切り替わり、送信波が物体に反射した反射波を受信することが可能となる。
【0099】
また、上記実施の形態において、レーダ装置1は、受信アンテナ14ごとに専用の処理回路(ミキサ15、および、AD変換器16)を設けてもよいが、全受信アンテナによる受信信号をまとめて処理する回路を設けてもよい。この場合、時分割で処理回路が対応する受信アンテナ14を受信アンテナ14aから14dに順次切替える制御が必要となるが、レーダ装置1の回路構成をコンパクトにできる。
【0100】
また、上記実施の形態において、データ分割部101が複数のデジタルデータをデータ群に分割する場合、上記実施の形態では所定のデータ数ごとに分割することについて述べたが、これ以外にデジタルデータの数を異なるデータ数として分割するようにしてもよい。具体的には2500個のデジタルデータをデータ数を1500個のデータ群と、データ数が1000個のデータ群となるようにデジタルデータをデータ分割部101が分割するようにしてもよい。さらに、データ数がそれぞれ異なる1200個、800個、500個のデータ群となるように3つ以上のデータ群にデータ分割部101が分割するようにしてもよい。
【0101】
また、上記実施の形態において、デジタルデータのデータ分割を行い、空間平均法に用いられる相関行列の数を増加させて相互干渉成分を低減することで、距離が同一で角度が異なる複数の検知点のそれぞれの角度を精度よく算出することについて述べた。これに加えて、距離が同一で角度が異なる検知点が複数存在しない場合、つまりピーク信号に含まれる検知点の情報が一つの場合でも、一の検知点の角度を精度よく算出できる。
【符号の説明】
【0102】
1・・・・・レーダ装置
10・・・・信号処理装置
11・・・・信号生成部
12・・・・発振器
13・・・・送信アンテナ
14・・・・受信アンテナ
15・・・・ミキサ
16・・・・AD変換器
【技術分野】
【0001】
本発明は、物体検出における信号処理に関する。
【背景技術】
【0002】
送信波が物体に反射した反射波を受信するレーダ装置がある。反射波を受信したレーダ装置は、送信波に対応する送信信号と、受信波に対応する受信信号との差分を示すビート信号を生成する。そして、レーダ装置の信号処理装置がビート信号を高速フーリエ変換して変換データを導出する。さらに、送信信号の周波数が上昇する第1期間と周波数が下降する第2期間のそれぞれの期間での変換データにおける所定の閾値を超えるレベルの信号(以下、「ピーク信号」という。)を信号処理装置が導出する。導出されたピーク信号を演算して、物体に係る検知点の位置等を算出する。
【0003】
なお、レーダ装置が複数のアレーアンテナを備えている場合は、DBF(Digital Beam Forming)、PRISM(Propagator method based on an Improved Spatial-smoothing Matrix)、MUSIC(Multiple Signal Classification)、および、ESPRIT(Estimation of Signal Parameters via Rotational Invariance Techniques)などのうちいずれかのアルゴリズムが検知点の角度を演算するときに用いられる。そして、上述のアルゴリズムのうち例えば、ESPRITを用いる場合は、検知点の角度算出に用いる相関行列の導出に空間平均法を用いるときがある。
【0004】
空間平均法は、複数のアレーアンテナのうち所定の数のアンテナの組み合わせであるサブアレーによる相関行列を複数生成し、当該複数の相関行例を足し合わせて平均を導出することで、受信信号の相互干渉成分を減少させ、所望波に対応する理想的な信号成分を導出する処理である。つまり、複数の受信アンテナで受信した受信信号を高速フーリエ変換して取得された複数の変換データに基づく複数の相関行列を足し合わせて、当該相関行列の平均の値を導出することで、相互干渉成分の影響が低減された信号が導出される。
【0005】
そして、送信信号の周波数が上昇する第1期間と周波数が下降する第2期間とを送信信号の1周期とした場合、送信信号の連続的な周期の数の増加に比例して生成される相関行列の数は増加し、空間平均法の処理に用いられる相関行列の数も増加する。そして、空間平均法の処理に用いられる相関行列の数が多ければ多いほど、受信信号の相互干渉成分の低減率も増加する。そのため、できるだけ連続的な周期の数を増やして相関行列を生成することが望ましい。つまり、送信信号に対応する送信波を連続的に出力する時間を増加させて、送信信号における各周期において相関行列を生成して、全ての相関行列を足し合わせて平均の値を導出する。これにより、受信信号の相互干渉成分はより大きく低減し、物体に係る複数の検知点のそれぞれの角度が精度よく正確に導出できる。なお、本発明と関連する技術を説明する資料としては特許文献1がある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−25928号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、一のレーダ装置から送信波を連続的に送信する時間が増加すると、他のレーダ装置が一のレーダ装置からの送信波および反射波の少なくともいずれか一方を受信する可能性が高くなることがあった。このような場合には、他のレーダ装置が検知点の誤った位置を検出することがあった。
【0008】
さらに、レーダ装置から送信波を連続的に送信する時間が増加することに伴いレーダ装置内部の発熱量が増加する。これにより、レーダ装置を構成する部品への負荷を増加させる場合があった。そのため、送信波を連続的に出力する時間をできるだけ短くする、つまり、送信信号の連続的な周期の数を低減させる必要があった。しかし、送信波を連続的に出力する時間を短くすると、空間平均法の処理に用いる相関行列の数が減少し、複数の検知点のそれぞれの角度が正確に導出されない場合があった。
【0009】
本発明は、送信波の出力時間を短縮化して物体の角度検出精度を向上させることを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決するために、本発明は、物体に対応する検知点の角度を複数のアレーアンテナの受信信号に基づいて演算する信号処理装置であって、所定周期で周波数が変わる送信信号と、該送信信号に基づく送信波の前記検知点での反射波を受信した受信信号との差分によりビート信号を生成する生成手段と、前記ビート信号をAD変換してデジタルデータを導出する導出手段と、前記デジタルデータを複数のデータ群に分割する分割手段と、前記データ群を高速フーリエ変換して前記データ群の数に対応する複数の変換データを取得する取得手段と、前記変換データを複数の組に分けて前記組ごとの相関行列を取得して、前記相関行列を平均した値を算出する算出手段と、前記相関行列を平均した値に基づいて前記検知点の角度を演算する演算手段と、を備える。
【0011】
また、本発明の信号処理装置の分割手段は、前記デジタルデータを所定のデータ数ごとの複数のデータ群に分割する。
【0012】
また、本発明の信号処理装置の分割手段は、前記送信信号の周波数が上昇する第1期間と、前記送信信号の周波数が下降する第2期間のそれぞれの期間の中で分割する。
【0013】
また、本発明は信号処理装置と、前記送信波を送信する送信手段と、前記反射波を受信する受信手段と、前記信号処理装置で検出した検知点の情報を車両の各部を制御する車両制御装置に出力する。
【0014】
また、本発明は、物体に対応する検知点の角度を複数のアレーアンテナの受信信号に基づいて演算する信号処理方法であって、所定周期で周波数が変わる送信信号と、該送信信号に基づく送信波の前記検知点での反射波を受信した受信信号との差分によりビート信号を生成する工程と、前記ビート信号をAD変換してデジタルデータを導出する工程と、前記デジタルデータを複数のデータ群に分割する工程と、前記データ群を高速フーリエ変換して前記データ群の数に対応した複数の変換データを取得する工程と、前記変換データを複数の組に分けて前記組ごとの相関行列を取得して、前記相関行列を平均した値を算出する工程と、前記相関行列を平均した値に基づいて前記検知点の角度を演算する工程と、を備える。
【発明の効果】
【0015】
本発明によれば、デジタルデータを複数のデータ群に分割して変換データの数を増やすことで、送信波の送信時間が減少した場合でも変換データ数の減少を防ぎ、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。
【0016】
また、本発明によれば、分割手段がデジタルデータを所定のデータ数ごとの複数のデータ群に分割することで、デジタルデータの数を同数とする複数のデータ群を得ることができ、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。
【0017】
また、本発明によれば、分割手段は、送信信号の周波数が上昇する第1期間と、送信信号の周波数が下降する第2期間のそれぞれの期間の中で分割することで、第1期間および第2期間のそれぞれのデータ群の数を増加させて、検知点に対応する複数の物体のそれぞれの角度を精度よく導出できる。
【0018】
さらに、本発明によれば、信号処理装置で検出した検知点の情報を車両の各部を制御する車両制御装置に出力することで、検知点に対応した物体の位置等に応じた車両制御を行える。
【図面の簡単な説明】
【0019】
【図1】図1は、レーダ装置のブロック図である。
【図2】図2は、FM−CW方式信号を示す図である。
【図3】図3は、信号処理装置における角度演算を詳細に説明する図である。
【図4】図4は、UP区間の変換データを詳細に説明する図である。
【図5】図5は、DOWN区間の変換データを詳細に説明する図である。
【図6】図6は、物体に係る検知点の角度スペクトラムを示す図である。
【図7】図7は、レーダ装置の処理について説明するフローチャートである。
【図8】図8は、レーダ装置の処理について説明するフローチャートである。
【発明を実施するための形態】
【0020】
以下、図面を参照しつつ本発明の実施の形態について説明する。以下に示す実施の形態は例示であり、本願発明の技術的範囲をこれらに限定するものではない。
【0021】
<第1の実施の形態>
<1.ブロック図>
図1は、レーダ装置1のブロック図である。レーダ装置1は、車両の周辺の他の車両などの物体に係る検知点を検出する。検知点の検出結果は、車両の各部に制御信号を出力する車両制御装置2に送信されて、アクセル開度の調整、および、車両のユーザが装着するシートベルトの引き締めなどの車両の制御に用いられる。
【0022】
レーダ装置1は、信号処理装置10、信号生成部11、発振器12、送信アンテナ13、受信アンテナ14、ミキサ15、および、AD(Analog to Digital)変換器16を主に備えている。
【0023】
信号処理装置10は、レーダ装置1が受信した受信信号に基づいて、物体に係る検知点の位置等を検出する。信号処理装置10の詳細な処理については、後述する。
【0024】
信号生成部11は、後述する送信制御部107の指示信号に基づいて、三角波状に電圧が変化する変調信号を生成する。
【0025】
発振器12は、信号生成部11で生成された変調信号に基づき所定の周波数帯の信号(例えば、76.5GHz)を周波数変調し、送信信号として送信アンテナ13に出力する。
【0026】
送信アンテナ13は、送信信号に対応する送信波を車両外部に出力する。本実施の形態のレーダ装置1は送信アンテナ13a、および、送信アンテナ13bの2本の送信アンテナを有している。送信アンテナ13a、および、13bは、切替部131のスイッチングにより所定の周期で切替られ、発振器12と接続された送信アンテナ13から送信波が連続的に車両外部に出力される。
【0027】
切替部131は、発振器12と送信アンテナ13との接続を切替えるスイッチであり、送信制御部107の指示信号により送信アンテナ13a、および、送信アンテナ13bのいずれかの送信アンテナと発振器12とを接続する。
【0028】
受信アンテナ14は、送信アンテナ13から連続的に送信された送信波が物体に反射した反射波を受信する複数のアレーアンテナである。本実施の形態では、受信アンテナ14a(ch1)、14b(ch2)、14c(ch3)、および、14d(ch4)の4本の受信アンテナを備えている。なお、受信アンテナ14a〜14dのそれぞれのアンテナは等間隔に配置されている。
【0029】
ミキサ15は、各受信アンテナごとに設けられている。ミキサ15は、受信信号と送信信号とを混合する。そして、受信信号と送信信号との混合により送信信号と受信信号との差分のビート信号が生成されて、AD変換器16に出力される。
【0030】
AD変換器16は、アナログ信号であるビート信号を所定周期でサンプリングして、複数のサンプリングデータを導出する。そして、サンプリングされたデータを量子化し、アナログデータのビート信号をデジタルデータに変換し、当該デジタルデータを信号処理装置10に出力する。なお、AD変換器16もミキサ15と同様に各受信アンテナごとに設けられている。
【0031】
信号処理装置10は、データ分割部101、フーリエ変換部102、ピーク抽出部103、平均処理部104、角度演算部105、距離・相対速度演算部106、および、送信制御部107の機能を主に備えている。以下、各機能について説明する。
【0032】
データ分割部101は、AD変換器16から出力されたデジタルデータを複数のデータ群に分割する。例えば、ビート信号をAD変換して取得されるデジタルデータが2500個の場合に、1250個のデジタルデータを有する2つのデータ群にデータ分割部101が分割する。なお、データ分割部101によるデータ分割は、各受信アンテナごとに行われる。そのため、上述のように1つの受信アンテナのビート信号をAD変換して、2500個のデジタルデータを2つのデータ群に分割する場合に、4本の受信アンテナが存在するときは、各受信アンテナのデータ群を合計すると8つのデータ群が当該処理により取得される。なお、データ分割部101の詳細な処理については後述する。
【0033】
フーリエ変換部102は、分割したデータ群のそれぞれに対して高速フーリエ変換処理を行う。これにより、周波数を基準とした信号レベルを示す複数の変換データが取得される。つまり、データ群の数が8つの場合は8つの変換データが取得される。
【0034】
ピーク抽出部103は、各変換データの信号のうち信号レベルが所定の閾値を超える信号(以下、「ピーク信号」という。)を抽出する。
【0035】
平均処理部104は、複数の変換データを複数の組に分けて、組ごとの相関行列を取得する。詳細には、平均処理部104は、複数の変換データのうち一の変換データごとの対応するピーク信号を複数の組に分けて、組ごとの相関行列を取得する。ここで、対応するピーク信号とは、一の変換データのピーク信号と他の変換データのピーク信号のうち、ピーク信号の周波数および信号レベルが略同じ値を示すピーク信号である。つまり、同一の検知点からの反射波を複数の受信アンテナ14で受信することで、周波数および信号レベルが略同一で、アンテナ間隔に応じて異なる位相を有するピーク信号が各変換データごとに存在し、当該ピーク信号が対応するピーク信号となる。
【0036】
そして、組ごとの相関行列を取得した後に、各組の相関行列を足し合わせて平均した値を導出する。なお、組ごとの相関行列を足し合わせて平均した値は次の数式で求められる。また、数式の、Rnxxは変換データの第n組の相関行列、znは各相関行列に対する重み付けを示す。
【0037】
【数1】
角度演算部105は、平均処理部104で導出された相関行列を平均した値に基づいて物体に係る検知点の角度を演算する。角度の演算は、例えばESPRITなどのアルゴリズムが用いられ、平均処理部104で導出された相関行列の平均の値の固有値、および、固有ベクトルに基づいて検知点の角度が演算される。これにより、検知点に対応する物体の角度を精度よく検出できる。
【0038】
距離・相対速度演算部106は、変換データ中のピーク周波数に基づいて検知点とレーダ装置1を搭載した車両との距離、および、検知点とレーダ装置1を搭載した車両との相対速度の情報を演算する。ここで、距離は次の(1)式、相対速度は次の(2)式により求められる。また、Rは距離、fupは周波数が上昇する区間における複数の変換データのピーク信号を平均した周波数、fdnは周波数が下降する区間における複数の変換データのピーク信号を平均した周波数、ΔFは送信波の変調幅(例えば、200MHz)、fmは変調周波数、f0は中心周波数(例えば、76.5GHz)、cは送信波の伝搬速度である。
【0039】
【数2】
また、相対速度は次の数式により導出され、Vは相対速度を示す。
【0040】
【数3】
なお、距離・相対速度演算部106の詳細な処理については後述する。
【0041】
送信制御部107は、信号生成部11に変調信号を生成する指示信号を出力する。つまり、後述する図2に示す送信信号TXの送信タイミングを制御する。また、送信制御部107は、切替部131の送信アンテナ13の切替を制御する。つまり、発振器12から出力される送信信号を送信波として送信アンテナ13aおよび13bのうちのいずれの送信アンテナから車両外部に送信するかを決定する。
【0042】
<2.FM−CWの信号処理>
次に、物体検出の信号処理の一例としてFM−CW(Frequency Modulated Continuous Wave)方式における信号処理について説明する。なお、本実施形態では、FM−CWの方式を例に説明を行うが、周波数が上昇する区間と周波数が下降する区間のような複数の区間を組み合わせて物体の位置等を検出する方式であれば、FM−CW方式に限定されない。
【0043】
図2はFM−CW方式の信号を示す図である。図2の上段の図はFM−CW方式の送信信号TX、および、受信信号RXの信号波形を示す図である。また、図2の中段の図は送信信号TXと受信信号RXとの差分により生じるビート周波数を示す図である。さらに、図2の下段の図はビート周波数に対応するビート信号を示す図である。
【0044】
図2上段の図は、縦軸が周波数[GHz]、横軸が時間[msec]を示す図である。図中の送信信号TXは、中心周波数をf0(例えば、76.5GHz)として、所定周波数(例えば76.6GHz)まで上昇した後に所定周波数(例えば、76.4GHz)まで下降をするように200MHzの間で一定の変化を繰り返す。このように所定周波数まで周波数が上昇する区間(以下、「UP区間」ともいい、例えば、図2に示す、区間U1、U2、U3、および、U4がUP区間に該当する。)と、所定周波数まで上昇した後に所定の周波数まで下降する区間(以下、「DOWN区間」ともいい、例えば、区間D1、D2、D3、および、D4がDOWN区間に該当する。)がある。
【0045】
なお、本実施の形態のレーダ装置1では、送信アンテナ13から出力される送信波は、一のUP区間である区間U1と一のDOWN区間である区間D1の組み合わせを送信信号TXの1周期として、送信信号TXの2周期分に相当する送信波を車両外部に送信する。
【0046】
また、送信信号TXに対応する送信波の出力については、送信アンテナ13からの送信波の出力を所定時間の間、中止する未送信区間を設けている。つまり、1周期分の送信信号TXに対応する送信波を連続的に車両外部に出力することで、合計2周期分の送信信号TXに対応する送信波を車両外部に出力する。そして、未送信区間に対応する時間が経過した後に、再び2周期分の送信信号TXに対応する送信波を車両外部に出力する。これにより、例えば、4周期分の送信信号TXに対応する送信波を送信することと比べると、レーダ装置1から車両外部へ送信波を出力する時間を短縮でき、他のレーダ装置に対する影響を低減できる。
【0047】
しかし、ESPRITなどのアルゴリズムを用いて物体に係る検知点の角度を算出する場合に、4周期分の送信信号TXに対応する送信波を車両外部に出力する場合と比べると、2周期分の送信信号TXに対応する送信波を出力することは、空間平均法を用いて相関行列の平均を導出することによる相互干渉成分の低減率は低くなる。
【0048】
そのため、以下の<3.信号処理装置の詳細処理>において説明するように、送信波を出力する時間を変えずに(送信信号TXの周期を2周期としたままで)、AD変換器16により変換されたデジタルデータを複数のデータ群に分割して空間平均法に用いる変換データの数を増加させる。これにより、2周期分の送信信号TXに対応する送信波を出力する場合に、空間平均法を用いて相関行列の平均を導出することによる相互干渉成分の低減の効果は、4周期分の送信信号TXに対応する送信波を出力する場合と略同じ効果となる。
【0049】
なお、送信波の車両外部への出力は、送信アンテナ13を切替えて送信する。例えば、送信アンテナ13aから2周期分の送信信号のうち最初の1周期の送信信号に対応する送信波が送信された後に、送信制御部107の指示信号により切替部131が発振器12と接続されるアンテナを送信アンテナが13aから送信アンテナ13bに切り替えて、2周期分のうちの残りの1周期の送信信号に対応する送信波を送信アンテナ13bから送信する。
【0050】
また、送信アンテナ13から送信された送信波が物体にあたって反射波として受信アンテナ14に受信されると、受信アンテナ14を介して受信信号RXとしてミキサ15に入力される。さらに、受信信号RXについても送信信号TXと同じように所定周波数まで周波数が上昇する区間と、所定周波数まで周波数が下降する区間とが存在する。
【0051】
また、レーダ装置1を搭載した車両と物体に係る検知点との距離に応じて、送信信号に比べて受信信号に時間的な遅れが生じる。さらに、レーダ装置1を搭載した車両に対する物体間に速度差を有する場合は、送信信号に対して受信信号にドップラーシフト分の差が生じる。
【0052】
図2中段の図は縦軸が周波数[kHz]、横軸が時間[msec]を示す図であり、図中にはUP区間およびDOWN区間の送信信号と受信信号との差を示すビート周波数が示されている。例えば、区間U1ではビート周波数BF1が導出され、区間D1ではビート周波数BF2が導出されている。このように各区間において、ビート周波数が導出される。
【0053】
図2の下段の図は、縦軸が振幅[V]、横軸が時間[msec]を示す図である。図中には、ビート周波数に対応するアナログ信号のビート信号BSが示されており、当該ビート信号BSがAD変換器16によりデジタルデータに変換される。なお、図2では一の検知点から受信した場合のビート信号BSが示されているが、送信信号TXに対応する送信波が複数の検知点に反射し、複数の反射波として受信アンテナ14に受信された場合は、受信信号RXは複数の反射波が合成されたものとなり、送信信号TXとの差分を示すビート信号BSも複数の反射波が合成されたものとなる。
【0054】
<3.信号処理装置の詳細処理>
図3は、信号処理装置10における角度演算を詳細に説明する図である。図3には、送信信号TXのUP区間およびDOWN区間の組み合わせが2周期分示されており、2周期分の送信信号TXに対応する送信波が送信アンテナ13から送信される。そして、送信波が物体に反射して反射波として受信された受信信号RXが示されている。また、送信信号TXと受信信号RXとの差分であるビート信号をAD変換器16がデジタルデータに変換する。
【0055】
図3を用いて具体的に説明すると、送信信号TXの第1周期のUP区間(区間U1)に対応する時間(時間t0〜t1)のビート信号をAD変換器16で変換したデータであるデジタルデータAD1uのデータ数が2500個となる。そして、第1周期のDOWN区間(区間D1)に対応する時間(時間t1〜t2)のデジタルデータAD1dのデータ数が2500個となる。さらに、第2周期のUP区間(区間U2)に対応する時間(時間t2〜t3)のデジタルデータAD2u、および、第2周期のDOWN区間(区間D2)に対応する時間(時間t3〜t4)のデジタルデータAD2dのデータ数もそれぞれ2500個となっている。このようなデータ数の取得は、UP区間(DOWN区間)に対応する時間でのサンプリング周期を予め所定のサンプリング周期に定めることで実現される。
【0056】
次に、UP区間とDOWN区間のそれぞれの区間の中でAD変換したデジタルデータをデータ分割部101が複数のデータ群に分割する。つまり、4つの区間(区間U1、D1、U2、D2)のそれぞれの区間おいてAD変換したデジタルデータ(デジタルデータAD1u、AD1d、AD2u、AD2d)をデータ分割部101が複数のデータ群に分割する。具体的には、時間t0〜t1に対応する区間U1の2500個のデジタルデータAD1uを時間t0〜t1に対して半分の時間である時間t0〜t11に対応するデータ群AD11uとしてデータ分割部101が分割する。つまり、2500個のデジタルデータを所定のデータ数(例えば、本実施の形態では2500個の半分のデータ数である1250個)のデジタルデータにデータ分割部101が分割する。
【0057】
そして、分割の結果、時間t0〜t11に対応するデータ数1250個のデータ群AD11uと、時間t11〜t1に対応するデータ数1250個のデータ群AD12uとが導出される。これにより、デジタルデータの数を同数とする複数のデータ群を得ることができ、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。
【0058】
同様に、時間t1〜t2に対応する区間D1のデータ数2500個のデジタルデータAD1dを時間t1〜t12に対応するデータ数1250個のデータ群AD11dと、時間t12〜t2に対応するデータ数1250個のデータ群AD12dとにデータ分割部101が分割する。
【0059】
また、時間t2〜t3に対応する区間U2のデータ数2500個のデジタルデータAD2uを時間t2〜t13に対応するデータ数1250個のデータ群AD21uと、時間t13〜t3に対応するデータ数1250個のデータ群AD22uとにデータ分割部101が分割する。
【0060】
さらに、時間t3〜t4に対応する区間D2のデータ数2500個のデジタルデータAD2dを時間t3〜t14に対応するデータ数1250個のデータ群AD21dと、時間t14〜t4に対応するデータ数1250個のデータ群AD22dとにデータ分割部101が分割する。このようにデジタルデータを所定のデータ数ごとの複数のデータ群に分割することで、受信アンテナ数を増加させることなく、複数のデータ群を取得できる。また、検知点に対応する複数の物体のそれぞれの角度を精度よく導出できる。
【0061】
次にデジタルデータを分割した8個のデータ群(データ群AD11u、AD12u、AD11d、AD12d、AD21u、AD22u、AD21d、AD22d)のぞれぞれのデータ群に対してフーリエ変換部102が高速フーリエ変換処理を行い、8個のデータ群の数に対応した8個の変換データを取得する。
【0062】
なお、データ群の数は受信アンテナの数に比例した数となる。つまり、これまで説明した8個のデータ群は例えば、受信アンテナ14a(ch1)の2周期分の送信信号に対応するビート信号をAD変換器16aを用いてAD変換し、当該AD変換したデジタルデータを複数のデータ群に分割したデータ群の数である。
【0063】
そして、本実施の形態のレーダ装置1は受信アンテナ14a(ch1)、14b(ch2)、14c(ch3)、14d(ch4)の4本の受信アンテナを備えている。つまり、受信アンテナ1本に対して8個のデータ群を取得でき、4本の受信アンテナがレーダ装置1に備えられているので、取得できるデータ群の合計は32個となる。その結果、フーリエ変換部102により得られる変換データは、32個のデータ群の数に対応する32個の変換データ(図3に示すch1〜ch4の変換データ)となる。
【0064】
次に、これらの32個の変換データのうち、UP区間(区間U1およびU2)に含まれる変換データ(変換データ数16個)から一のピーク信号(例えば、ピーク信号Pu1)の属する周波数fu1と略同じ周波数のピーク信号(例えば、図4に示す変換データFT1u〜FT16uのピーク信号Pu1〜Pu16)をピーク抽出部103が抽出する。
【0065】
ここで、ある検知点からの反射波はほぼ同時期に各受信アンテナで受信されるため、各受信アンテナの受信信号RXに含まれる検知点の周波数情報はほぼ等しい(ただし、位相情報は異なる)。即ち、高速フーリエ変換を行った周波数スペクトラム上でのピーク信号は各受信信号RXに対してほぼ等しい周波数の位置に現れる。したがって、同じ検知点からの反射波に基づく情報として周波数fu1のピーク信号Pu1〜Pu16をピーク抽出部103が抽出する。なお、異なる周波数(周波数fu2)における各ピーク信号についても同様にピーク抽出部103が抽出する。
【0066】
そして、平均処理部104が16個の変換データを並べたときの隣り合う3つの変換データのピーク信号を1組とした14組の相関行列(例えば図4に示す相関行列R1xx〜R14xx)を演算し、演算した14組の相関行列を足し合わせた平均の値を空間平均法を用いて導出する。
【0067】
また、32個の変換データのうち、DOWN区間(区間D1およびD2)に含まれる変換データ(変換データ数16個)から一のピーク信号(例えば、ピーク信号Pd1)の属する周波数fd1と略同じ周波数のピーク信号(例えば、図5に示す変換データFT1d〜FT16dのピーク信号Pd1〜Pd16)をピーク抽出部103が抽出する。なお、異なる周波数(周波数fd2)における各ピーク信号についても同様にピーク抽出部103が抽出する。
そして、平均処理部104が16個の変換データを並べたときの隣り合う3つの変換データのピーク信号を1組とした14組の相関行列(例えば図5に示す相関行列R21xx〜R34xx)を演算し、演算した14組の相関行列を足し合わせた平均の値を空間平均法を用いて算出する。
【0068】
図4は、UP区間である区間U1およびU2に対応する変換データを詳細に説明する図である。図4に示す変換データFT1u〜FT16uは上述の32個の変換データのうちのUP区間に含まれる変換データであり、各変換データの縦軸が信号レベル[dBv]、横軸が周波数[kHz]を示している。各変換データには複数のピーク信号が存在する。そして、各変換データではピーク抽出部103が所定の閾値を超え、略同じ周波数の信号であるピーク信号Pu1〜Pu16を抽出する。なお、これらのピーク信号(ピーク信号Pu1〜PU16)は、同一の検知点に基づく対応するピーク信号である。
【0069】
次に、変換データごとの対応するピーク信号を複数の組に分けて組ごとの相関行列を取得する。つまり、変換データFT1u、FT2u、FT3uの3つの変換データを1組としてそれぞれの変換データごとの対応するピーク信号であるピーク信号Pu1、Pu2、および、Pu3の相関行列R1xxを平均処理部104が導出する。
【0070】
そして、変換データを1つずらして、変換データFTu2、FT3u、FT4uの3つの変換データごとの対応するピーク信号を1組とする相関行列R2xxを平均処理部104が導出する。このように3つの変換データごとの対応するピーク信号を1組とする14組の相関行列(相関行列R1xx〜R14xx)を平均処理部104が生成し、当該14組の相関行列を平均した値を平均処理部104が算出する。
【0071】
図5は、DOWN区間である区間D1およびD2に対応する変換データを詳細に説明する図である。図5に示す変換データFT1d〜FT16dは上述の32個の変換データのうちのDOWN区間に含まれる変換データであり、各変換データの縦軸が信号レベル[dBv]、横軸が周波数[kHz]を示している。各変換データには複数のピーク信号が存在する。そして、各変換データではピーク抽出部103が所定の閾値を超え、ほぼ同じ周波数の信号であるピーク信号Pd1〜Pd16を抽出する。
【0072】
そして、変換データを複数の組に分けて組ごとの相関行列を取得する。つまり、変換データFT1d、FT2d、FT3dの3つの変換データごとの対応するピーク信号を1組とする相関行列R21xxを平均処理部104が導出する。次に変換データを1つずらして、変換データFTu2、FT3u、FT4uの3つの変換データごとの対応するピーク信号を1組とする相関行列R22xxを平均処理部104が導出する。このように3つの変換データごとの対応するピーク信号を1組とする14組の相関行列(相関行列R21xx〜R34xx)を平均処理部104が生成し、当該14組の相関行列を平均した値を平均処理部104が算出する。このようにして得られた相関行列を平均した値の固有値、および、固有ベクトルに基づいて、以下の<4.角度スペクトラム>で詳細に説明するように角度演算部105が検知点の角度を導出する。これにより、送信波の送信時間が減少した場合でも変換データ数の減少を防ぎ、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。なお、各変換データに存在する他の周波数ピークについても同様の処理が行われる。
【0073】
<4.角度スペクトラム>
図6は、物体に係る検知点の角度スペクトラムを示す図である。スペクトラムUSはUP区間における検知点の角度を示すものであり、閾値shを超えた信号である角度ピークPhu1、および、角度ピークPhu2は図4で説明したピーク周波数fu1におけるピーク信号Pu1〜Pu16に基づいて生成された14組の相関行列を平均した値の固有値、および、固有ベクトルから導出された検知点の角度を示す。即ち、ピーク周波数fu1のピーク信号の情報から2つの検知点の角度情報に分離したことを示す。
【0074】
ここで、変換データにおける一のピーク信号は、一の検知点からの反射波に基づく場合以外に、複数の検知点からの反射波に基づく場合がある。つまり、レーダ装置を搭載した車両に対する複数の検知点のそれぞれの角度の値が異なる場合で、レーダ装置を搭載した車両に対する複数の検知点のそれぞれの距離の値が同じ場合は、一のピーク信号に複数の検知点の情報が含まれている場合がある。
【0075】
そのため、図6のスペクトラムUSに示されるように角度ピークPhu1、および、Phu2の2つの角度ピークが存在する場合は、図4の変換データのピーク信号(ピーク信号Pu1〜Pu16)に角度ピークPhu1、および、Phu2に対応する2つの検知点の情報が含まれることを示している。
【0076】
また、スペクトラムDSはDOWN区間における検知点の角度を示すものであり、閾値shを超えた信号である角度ピークPhd1、および、角度ピークPhd2は図5で説明したピーク周波数fd1におけるピーク信号Pd1〜Pd16により生成14組の相関行列の平均した値の固有値、および、固有ベクトルから導出された検知点の角度を示す。
【0077】
図6のスペクトラムDSに示されるように角度ピークPhd1、および、Phd2の2つの角度ピークが存在する場合は、図5の変換データのピーク信号(ピーク信号Pd1〜Pd16)に角度ピークPhd1、および、Phd2に対応する2つの検知点の情報が含まれていることを示している。
【0078】
そして、UP区間の角度スペクトラムUSと、DOWN区間の角度スペクトラムDSとを信号レベルおよび角度に基づきペアリングする。図6では角度ピークPhu1およびPhd1は信号レベル、および、角度が略同一のピークであるため、角度ピークPhu1とPhd1がペアリングされる。また、角度ピークPhu2およびPhd2とは信号レベル,および,角度が略同一のピークであるため、角度ピークPhu2とPhd2がペアリングされる。そのため次の数式4により2つの角度ピークの平均を導出して、2つの検知点のそれぞれの角度を角度演算部105が演算する。これによりレーダ装置1を搭載した車両から略同じ距離に存在する複数の検知点(例えば、一の検知点と他の検知点)のそれぞれの角度を正確に取得できる。なお、数式のθmは検知点の角度を示し、θupは角度ピークphu1(phu2)に対応する角度を示す。また、θdnは角度ピークphd1(phd2)に対応する角度を示す。
【0079】
【数4】
また、図6に示す角度スペクトラムUS(DS)では複数の角度ピークが導出されている。変換データの一のピーク信号に複数の検知点の情報が含まれている場合に、デジタルデータのデータ群の数が少ないと、相関行列の数が少なくなり当該相関行列を用いて処理する空間平均法による相互干渉成分の低下率が下がる。その結果、複数の角度ピークが1つの角度ピークに合成され、検知点の角度を誤って算出する可能性がある。
【0080】
そのため、デジタルデータをデータ分割部101が分割してデータ群の数を増加させることで、相関行列の数が増加し、当該相関行列を用いて処理する空間平均法による相互干渉成分の低下率が高まる。そして、空間平均法により導出された相関行列の平均の値を用いて導出する固有値および固有ベクトルにより角度演算部105が検知点の角度を導出することで、変換データの一のピークに含まれる検知点の数に応じた角度ピークが導出される。これにより、複数の検知点の角度をそれぞれ正確に算出できる。
【0081】
検知点の角度を算出した後、距離・相対速度演算部106が各検知点について距離、相対速度を算出する。図6において、一の検知点のUP区間の角度ピークPhu1の周波数は図4に示す周波数fu1である。また、DOWN区間の角度ピークPhd1の周波数は図5に示す周波数fd1である。これらの周波数fu1、および、fd1の値を用いて、数2、および、数3により一の検知点の距離および相対速度を算出する。
【0082】
また、図6において他の検知点のUP区間の角度ピークPhu2の周波数は一の検知点と同じく周波数fu1であり、DOWN区間の角度ピークPhd2の周波数は一の検知点と同じく周波数fd1である。そして、これらの周波数fu1、および、fd1の値を用いて、数2、および、数3により他の検知点の距離および相対速度を算出する。これにより物体の位置および相対速度を精度よく導出できる。
【0083】
<5.処理フローチャート>
図7および図8はレーダ装置1の処理について説明するフローチャートである。ステップS101では、発振器12から出力された送信信号に対応する送信波を送信アンテナ13が車両外部に出力して、ステップS102の処理に進む。
【0084】
なお、送信アンテナ13からの送信波は送信信号TXにおける一のUP区間および一のDOWN区間を1周期とした場合に、1周期目に対応する送信波を一方の送信アンテナ13aから車両外部に出力し、2周期目に対応する送信波を他方の送信アンテナである送信アンテナ13bから車両外部に出力する。なお、2周期経過後は、所定期間送信波を車両外部に送信しない未送信区間を設けており、当該未送信区間に対応する時間が経過した後は、再び2周期分の送信信号TXに対応する送信波を車両外部に出力する。
【0085】
ステップS102では、送信波が物体に反射した反射波を受信アンテナ14が受信して、ステップS103の処理に進む。
【0086】
ステップS103では、受信アンテナ14で受信した反射波に対応する受信信号RXと送信信号TXとをミキサ15が混合し、送信信号TXと受信信号RXとの差分であるビート信号BSを生成してステップS104の処理に進む。
【0087】
ステップS104では、アナログ信号であるビート信号BSをAD変換器16がAD変換を行い、デジタルデータに変換してステップS105の処理に進む。
【0088】
ステップS105では、AD変換器16から出力されたデジタルデータをデータ分割部101が複数のデータ群に分割してステップS106の処理に進む。
【0089】
ステップS106では、分割した複数のデータ群のそれぞれに対してフーリエ変換部102が高速フーリエ変換処理を行って変換データを生成して、ステップS107の処理に進む。
【0090】
図8に示すステップS107では、高速フーリエ変換した変換データの信号のうち所定の閾値を超えるピーク信号をピーク抽出部103が抽出して、ステップS108の処理に進む。
【0091】
ステップS108では、UP区間およびDOWN区間のそれぞれの区間において、変換データごとの対応するピーク信号を複数の組に分けて組ごとの相関行列を平均処理部104が取得して、各組の相関行列を足し合わせて平均した値を平均処理部104が導出してステップS109の処理に進む。
【0092】
ステップS109では、平均処理部104で導出された相関行列を平均した値の固有値、および、固有ベクトルに基づいて物体に係る検知点の角度を演算して、ステップS110の処理に進む。
【0093】
ステップS110では、ステップS109で角度分離された各検知点について、変換データ中のピーク周波数に基づいて検知点とレーダ装置1を搭載した車両との距離、および、検知点とレーダ装置1を搭載した車両との相対速度を距離・相対速度演算部106が演算して、ステップS111の処理に進む。
【0094】
ステップS111では、物体に係る検知点の情報(距離、相対速度、角度)が車両の各部に制御信号を出力する車両制御装置2に出力される。これにより、検知点に対応する物体の位置等に応じた車両制御を行うことができる。
【0095】
<変形例>
以上、本発明の実施の形態について説明してきたが、この発明は上記実施の形態に限定されるものではなく様々な変形が可能である。以下では、このような変形例について説明する。なお、上記実施の形態で説明した形態、および、以下で説明する形態を含む全ての形態は、適宜に組み合わせ可能である。
【0096】
上記実施の形態において、レーダ装置1は、車両に搭載する以外の各種用途(例えば、飛行中の航空機および航行中の船舶の監視の少なくともいずれか1つ)に用いてもよい。
【0097】
また、上記実施の形態において、送信アンテナを2本、受信アンテナを4本として説明しているが、各アンテナの本数がこれ以外の本数でもよく、例えば、送信アンテナが1本、受信アンテナが5本であってもよい。
【0098】
また、上記実施の形態において、レーダ装置1は、受信アンテナ14と送信アンテナ13とをそれぞれ独立に設けているが、受信アンテナが送信アンテナを兼ねるようにしてもよい。この場合、各アンテナは送信波を送信した直後に受信状態に切り替わり、送信波が物体に反射した反射波を受信することが可能となる。
【0099】
また、上記実施の形態において、レーダ装置1は、受信アンテナ14ごとに専用の処理回路(ミキサ15、および、AD変換器16)を設けてもよいが、全受信アンテナによる受信信号をまとめて処理する回路を設けてもよい。この場合、時分割で処理回路が対応する受信アンテナ14を受信アンテナ14aから14dに順次切替える制御が必要となるが、レーダ装置1の回路構成をコンパクトにできる。
【0100】
また、上記実施の形態において、データ分割部101が複数のデジタルデータをデータ群に分割する場合、上記実施の形態では所定のデータ数ごとに分割することについて述べたが、これ以外にデジタルデータの数を異なるデータ数として分割するようにしてもよい。具体的には2500個のデジタルデータをデータ数を1500個のデータ群と、データ数が1000個のデータ群となるようにデジタルデータをデータ分割部101が分割するようにしてもよい。さらに、データ数がそれぞれ異なる1200個、800個、500個のデータ群となるように3つ以上のデータ群にデータ分割部101が分割するようにしてもよい。
【0101】
また、上記実施の形態において、デジタルデータのデータ分割を行い、空間平均法に用いられる相関行列の数を増加させて相互干渉成分を低減することで、距離が同一で角度が異なる複数の検知点のそれぞれの角度を精度よく算出することについて述べた。これに加えて、距離が同一で角度が異なる検知点が複数存在しない場合、つまりピーク信号に含まれる検知点の情報が一つの場合でも、一の検知点の角度を精度よく算出できる。
【符号の説明】
【0102】
1・・・・・レーダ装置
10・・・・信号処理装置
11・・・・信号生成部
12・・・・発振器
13・・・・送信アンテナ
14・・・・受信アンテナ
15・・・・ミキサ
16・・・・AD変換器
【特許請求の範囲】
【請求項1】
物体に対応する検知点の角度を複数のアレーアンテナの受信信号に基づいて演算する信号処理装置であって、
所定周期で周波数が変わる送信信号と、該送信信号に基づく送信波の前記検知点での反射波を受信した受信信号との差分によりビート信号を生成する生成手段と、
前記ビート信号をAD変換してデジタルデータを導出する導出手段と、
前記デジタルデータを複数のデータ群に分割する分割手段と、
前記データ群を高速フーリエ変換して前記データ群の数に対応した複数の変換データを取得する取得手段と、
前記変換データを複数の組に分けて前記組ごとの相関行列を取得して、前記相関行列を平均した値を算出する算出手段と、
前記相関行列を平均した値に基づいて前記検知点の角度を演算する演算手段と、
を備えることを特徴とする信号処理装置。
【請求項2】
請求項1に記載の信号処理装置であって、
前記分割手段は、前記デジタルデータを所定のデータ数ごとの複数のデータ群に分割すること、
を特徴とする信号処理装置。
【請求項3】
請求項1または2に記載の信号処理装置において、
前記分割手段は、前記送信信号の周波数が上昇する第1期間と、前記送信信号の周波数が下降する第2期間のそれぞれの期間の中で分割すること、
を特徴とする信号処理装置。
【請求項4】
請求項1ないし3のいずれかに記載の信号処理装置と、
前記送信波を送信する送信手段と、
前記反射波を受信する受信手段と、
前記信号処理装置で検出した検知点の情報を車両の各部を制御する車両制御装置に出力する出力手段と、
を備えることを特徴とするレーダ装置。
【請求項5】
物体に対応する検知点の角度を複数のアレーアンテナの受信信号に基づいて演算する信号処理方法であって、
所定周期で周波数が変わる送信信号と、該送信信号に基づく送信波の前記検知点での反射波を受信した受信信号との差分によりビート信号を生成する工程と、
前記ビート信号をAD変換してデジタルデータを導出する工程と、
前記デジタルデータを複数のデータ群に分割する工程と、
前記データ群を高速フーリエ変換して前記データ群の数に対応した複数の変換データを取得する工程と、
前記変換データを複数の組に分けて前記組ごとの相関行列を取得して、前記相関行列を平均した値を算出する工程と、
前記相関行列を平均した値に基づいて前記検知点の角度を演算する工程と、
を備えることを特徴とする信号処理方法。
【請求項1】
物体に対応する検知点の角度を複数のアレーアンテナの受信信号に基づいて演算する信号処理装置であって、
所定周期で周波数が変わる送信信号と、該送信信号に基づく送信波の前記検知点での反射波を受信した受信信号との差分によりビート信号を生成する生成手段と、
前記ビート信号をAD変換してデジタルデータを導出する導出手段と、
前記デジタルデータを複数のデータ群に分割する分割手段と、
前記データ群を高速フーリエ変換して前記データ群の数に対応した複数の変換データを取得する取得手段と、
前記変換データを複数の組に分けて前記組ごとの相関行列を取得して、前記相関行列を平均した値を算出する算出手段と、
前記相関行列を平均した値に基づいて前記検知点の角度を演算する演算手段と、
を備えることを特徴とする信号処理装置。
【請求項2】
請求項1に記載の信号処理装置であって、
前記分割手段は、前記デジタルデータを所定のデータ数ごとの複数のデータ群に分割すること、
を特徴とする信号処理装置。
【請求項3】
請求項1または2に記載の信号処理装置において、
前記分割手段は、前記送信信号の周波数が上昇する第1期間と、前記送信信号の周波数が下降する第2期間のそれぞれの期間の中で分割すること、
を特徴とする信号処理装置。
【請求項4】
請求項1ないし3のいずれかに記載の信号処理装置と、
前記送信波を送信する送信手段と、
前記反射波を受信する受信手段と、
前記信号処理装置で検出した検知点の情報を車両の各部を制御する車両制御装置に出力する出力手段と、
を備えることを特徴とするレーダ装置。
【請求項5】
物体に対応する検知点の角度を複数のアレーアンテナの受信信号に基づいて演算する信号処理方法であって、
所定周期で周波数が変わる送信信号と、該送信信号に基づく送信波の前記検知点での反射波を受信した受信信号との差分によりビート信号を生成する工程と、
前記ビート信号をAD変換してデジタルデータを導出する工程と、
前記デジタルデータを複数のデータ群に分割する工程と、
前記データ群を高速フーリエ変換して前記データ群の数に対応した複数の変換データを取得する工程と、
前記変換データを複数の組に分けて前記組ごとの相関行列を取得して、前記相関行列を平均した値を算出する工程と、
前記相関行列を平均した値に基づいて前記検知点の角度を演算する工程と、
を備えることを特徴とする信号処理方法。
【図1】

【図2】
【図3】
【図4】

【図5】

【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−32917(P2013−32917A)
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願番号】特願2011−167859(P2011−167859)
【出願日】平成23年7月30日(2011.7.30)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願日】平成23年7月30日(2011.7.30)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]