
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】干渉以外のエコーに対する抑圧を低減しつつ、干渉成分を的確に除去することができる信号処理装置を提供する。
【解決手段】スイープ間のレベル変化(例えば差分値)を検出し、基準パターンに照合してレベル変化パターンを出力する。スイープデータx(n)に対して、スイープデータx(n+1)が大きくなるパターン(パターンP)、スイープデータx(n)に対して、スイープデータx(n+1)が小さくなるパターン(パターンN)、それ以外のパターン(パターンZ)に分類する。干渉検出部153は、レベル変化パターンのうち少なくとも2つのレベル変化パターンに基づいて干渉を判定する。例えば、注目スイープデータx(n)の1つ前のスイープデータx(n−1)との変化パターンがパターンPであり、1つ後のスイープデータx(n+1)との変化パターンがパターンNである場合、干渉であると判定する。
【解決手段】スイープ間のレベル変化(例えば差分値)を検出し、基準パターンに照合してレベル変化パターンを出力する。スイープデータx(n)に対して、スイープデータx(n+1)が大きくなるパターン(パターンP)、スイープデータx(n)に対して、スイープデータx(n+1)が小さくなるパターン(パターンN)、それ以外のパターン(パターンZ)に分類する。干渉検出部153は、レベル変化パターンのうち少なくとも2つのレベル変化パターンに基づいて干渉を判定する。例えば、注目スイープデータx(n)の1つ前のスイープデータx(n−1)との変化パターンがパターンPであり、1つ後のスイープデータx(n+1)との変化パターンがパターンNである場合、干渉であると判定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、エコー信号に種々の処理を行う信号処理装置に関するものである。
【背景技術】
【0002】
従来、レーダ装置等においては、他船から送信された電磁波(干渉成分)がエコー信号に含まれていると、レーダ画像の表示品質を劣化させるという課題があった。
【0003】
そこで、同一方位および同一距離における時間的に連続する3つ以上の信号のうち、1つ過去のスイープだけ閾値を超える場合に干渉であると判定し、非表示(ゼロ置換)として干渉除去を行うものが提案されている(例えば特許文献1を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平5−27011号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、実際には低レベルの干渉が発生することもあり、閾値を高くして干渉除去処理を弱くすると、干渉を除去しきれないという課題がある。一方で、閾値を低く設定すると物標からのエコー信号まで除去してしまうことがある。
【0006】
そこで、この発明は、干渉以外のエコーに対する抑圧を低減しつつ、干渉成分を的確に除去することができる信号処理装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の信号処理装置は、エコー信号入力部と、エコー信号レベル検出部と、レベル変化検出部と、パターン出力部と、干渉判定部と、を備えている。エコー信号入力部は、アンテナから発射された電磁波の物標からの反射によるエコー信号が入力される。エコー信号レベル検出部は、アンテナからの距離と方位に対応させて前記エコー信号のそれぞれのレベルを検出する。レベル変化検出部は、エコー信号のうち、アンテナからの距離が略等しく方位が異なる、互いに近接する地点からの前記エコー信号間のレベル変化(例えば差分値)を検出する。
【0008】
そして、パターン出力部は、レベル変化をそれぞれあらかじめ定められた基準パターンに照合してレベル変化パターンを出力する。例えば、あるスイープのデータx(n)に対して、次のスイープのデータx(n+1)が大きくなるパターン(第1のパターンP)、あるスイープのデータx(n)に対して、次のスイープのデータx(n+1)が小さくなるパターン(第2のパターンN)、それ以外のパターン(第3のパターンZ)、等に分類する。
【0009】
干渉判定部は、レベル変化パターンのうち少なくとも2つのレベル変化パターンに基づいて干渉を判定する。例えば、注目スイープのデータx(n)の1つ前のスイープデータx(n−1)との変化パターンがパターンPであり、1つ後のスイープデータx(n+1)との変化パターンがパターンNである場合、干渉であると判定する。また、干渉成分は、方位方向に複数連続する場合もあるため、注目スイープのデータx(n)の1つ前のスイープデータx(n−1)との変化パターンがパターンPであり、1つ後のスイープデータx(n+1)との変化パターンがパターンZである場合や、注目スイープのデータx(n)の1つ前のスイープデータx(n−1)との変化パターンがパターンZであり、1つ後のスイープデータx(n+1)との変化パターンがパターンNである場合についても干渉と判定する態様でもよい。
【0010】
これにより、方位方向に急峻に立ち上がり、その後急峻に立ち下がる干渉成分特有のレベル変化パターンを抽出することができる。この場合、従来の様に、ある位置の時間軸上のデータから閾値を超えるか否かで判定する場合よりも干渉成分だけを的確に抽出することができる。
【0011】
さらに、注目スイープと前後スイープの3点だけでなく、より多数のスイープのデータを用いてもよい。例えば、注目スイープのデータx(n)の2つ前のスイープデータx(n−2)から1つ前のスイープデータx(n−1)への変化パターンがパターンPであり、スイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンZであり、スイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンZである場合、干渉と判定する。また、スイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンZであり、スイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンZであり、スイープデータx(n+1)からスイープデータx(n+2)への変化パターンがパターンNである場合も、干渉と判定してもよい。これにより、方位方向に連続する干渉成分の検出を行うことができる。
【0012】
さらに、方位方向に連続する複数のレベル変化のパターンが、連続してパターンPである場合も干渉成分と判定する態様でもよい。例えば、スイープデータx(n−2)からスイープデータx(n−1)への変化パターンがパターンPであり、かつスイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンPである場合や、スイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンPであり、かつスイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンPである場合等である。また、方位方向に連続する複数のレベル変化のパターンが、連続してパターンNである場合も干渉成分と判定する態様でもよい。例えば、スイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンNであり、かつスイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンNである場合や、スイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンNであり、かつスイープデータx(n+1)からスイープデータx(n+2)への変化パターンがパターンNである場合等である。
この場合、方位方向に異なる信号レベルを有する干渉成分を検出することができる。
【0013】
また、本発明の信号処理装置は、距離方向のレベル変化を考慮する態様であってもよい。例えば、レベル変化検出部は、各方位のレベル変化を距離方向の信号を用いて平均化する。この場合、パターン出力部は、平均化した後の前記レベル変化を照合する。あるいは、隣接する距離方向のレベル変化をさらに検出し、所定の距離範囲内のレベル変化パターンのうち、最も多いレベル変化パターンを、各方位および各距離のレベル変化パターンとして出力態様等であってもよい。
【発明の効果】
【0014】
この発明のエコー信号処理装置によれば、干渉以外のエコーに対する抑圧を低減しつつ、干渉成分を的確に除去することができる。
【図面の簡単な説明】
【0015】
【図1】本実施形態のレーダ装置の構成を示すブロック図である。
【図2】スイープ間のレベル変化のパターンを示す図である。
【図3】干渉であると判定するパターンを示す図である。
【図4】レベル低減処理の態様を示す図である。
【図5】エコー画像を示す図である。
【図6】従来の干渉検出と本実施形態の干渉検出との違いを示す図である。
【図7】従来の干渉検出と本実施形態の干渉検出との違いを示す図である。
【図8】方位方向に連続する5つのスイープデータを用いて干渉判定を行う場合の変化パターンを示す図である。
【図9】方位方向に連続する5つのスイープデータを用いて干渉判定を行う場合の変化パターンを示す図である。
【図10】エコー画像を示す図である。
【図11】エコー画像を示す図である。
【図12】距離方向のサンプルを考慮した変化パターンの分類を示す図である。
【発明を実施するための形態】
【0016】
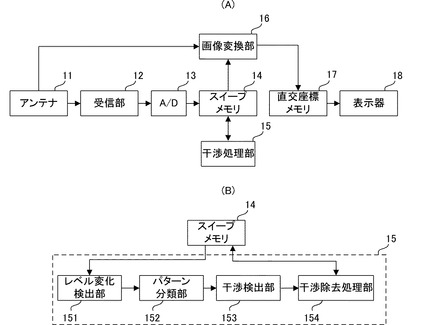
図1(A)は、本発明の信号処理装置を内蔵したレーダ装置の構成を示すブロック図である。レーダ装置は、例えば船舶に設置され、自船の周囲に電磁波を送受信し、他船等の物標を探知する装置である。
【0017】
図1(A)において、レーダ装置は、アンテナ11、受信部12、A/D変換器13、スイープメモリ14、干渉処理部15、画像変換部16、直交座標メモリ17、および表示器18を備えている。
【0018】
アンテナ11は、自船の周囲の各方位に電磁波を送信し、エコー信号を受信する。受信部12は、アンテナ11で受信したエコー信号のレベルに応じた値をA/D変換器13に出力する。A/D変換器13は、入力されたアナログ値のエコー信号をデジタル変換し、測定データとしてスイープメモリ14に出力する。
【0019】
スイープメモリ14は、測定1周期分(自船の周り360度分)の測定データを記憶する。各測定データは、極座標系の方位および距離と対応付けられたサンプルデータ(スイープデータ)として記憶される。
【0020】
画像変換部16は、スイープメモリ14からスイープデータを入力し、自船の位置を原点とした直交座標系に変換して、各スイープデータのレベルに応じた階調の画素輝度値として出力する。この直交座標系の画素輝度値が直交座標データとして直交座標メモリ17に記憶される。
【0021】
表示器18は、直交座標メモリ17に記憶されている直交座標データを読み出し、図5に示すようなレーダ画像(エコー画像)を表示する。なお、本実施形態では、背景色が黒で、画素輝度値が高い画素ほど白く表示される例を示すが、逆に、背景色が白で、画素輝度値が高い画素ほど黒く表示されるようにしてもよい。また、カラー画像として表示される態様であってもよい。
【0022】
アンテナ11が受信するエコー信号には、物標で反射した電磁波以外にも、他船等から発射された電磁波が干渉成分として含まれている場合がある。エコー信号に干渉成分が含まれていると、図5(A)に示すように、距離方向に細長く延びるエコー画像が表示されてしまう。
【0023】
ここで、本実施形態のレーダ装置は、干渉処理部15で干渉成分を検出してレベル低減処理を行い、スイープメモリ14のスイープデータの内容を更新する。その結果、画像変換部16には、干渉低減処理後のスイープデータが入力され、表示器18には干渉成分だけが的確に除去されたエコー画像が表示される。
【0024】
以下、干渉処理部15の処理内容について具体的に説明する。図1(B)は、干渉処理部15の構成を示すブロック図である。干渉処理部15は、レベル変化検出部151、パターン分類部(本発明におけるパターン出力部)152、干渉検出部153、および干渉除去処理部154を備えている。干渉処理部15は、これら構成部により、スイープデータに含まれる干渉成分を検出し、レベル低減処理を行う。
【0025】
レベル変化検出部151は、スイープメモリ14からスイープデータを読み出し、各距離のスイープ間のレベル変化を検出する。あるスイープのサンプルをx(n)、同じ距離の次のスイープのサンプルをx(n+1)とすると、レベル変化検出部151は、スイープ間のレベル差x(n+1)−x(n)を全サンプルについて求める。
【0026】
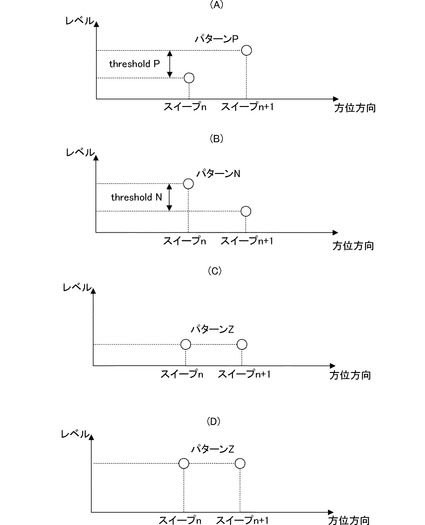
パターン分類部152は、レベル変化検出部151で求めたスイープ間のレベル変化を複数のパターンに分類する。図2は、スイープ間のレベル変化のパターンを示す図である。図2に示すように、パターン分類部152は、スイープ間のレベル変化を以下の数式1に示すような3つのパターンに分類する。
【0027】
【数1】

【0028】
すなわち、パターン分類部152は、図2(A)に示すように、あるスイープのサンプルx(n)のレベルに対し、次のスイープのサンプルx(n+1)のレベルが所定値以上大きくなるパターン(レベル差が所定のしきい値thresholdPよりも大きい場合)をパターンP(Positive)とする(なお、以下の図中において、thresholdPと記載している箇所は、スイープ間のレベル差がthresholdP以上の値であったとして説明する)。
【0029】
また、図2(B)に示すように、スイープデータx(n)のレベルに対し、スイープデータx(n+1)のレベルが所定値以上小さくなるパターン(レベル差が所定のしきい値thresholdNよりも小さい場合)をパターンN(Negative)とする(ただし、thresholdP>thresholdNとし、以下の図中において、thresholdNと記載している箇所は、スイープ間のレベル差がthresholdN以下の値であったとして説明する)。図2(C)および図2(D)に示すように、これらパターンNにもパターンPにもあてはまらない場合、つまり、スイープ間でのレベル変化が少ない場合は、パターンZとされる。
【0030】
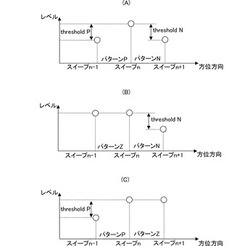
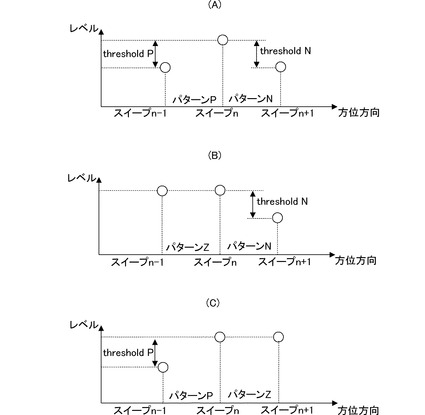
干渉検出部153は、スイープデータの各サンプルについて、パターン分類部152が分類したパターンに基づいて干渉に起因するエコー信号であるか否かの判定を行う。図3は、干渉であると判定するパターンを示す図である。干渉検出部153は、注目スイープデータx(n)について、方位方向に連続する複数のサンプル(この例では前後2つのサンプルを含む3つのサンプル)のレベル変化パターンに基づいて干渉を判定する。例えば、図3(A)に示すように、x(n−1)からx(n)のレベル変化パターンがパターンPであり、x(n)からx(n+1)のレベル変化パターンがパターンNとなる場合、注目スイープデータx(n)が干渉に起因するエコー信号であると判定する。干渉成分は、方位方向に急峻に立ち上がった後に急峻に立ち下がる特性を有する。したがって、干渉検出部153は、干渉成分に特有のレベル変化パターンを抽出することで、干渉成分だけを的確に抽出することができる。
【0031】
また、干渉成分は、方位方向に複数連続する場合もあるため、図3(B)に示すように、x(n−1)からx(n)の変化パターンがパターンZであり、かつx(n)からx(n+1)の変化パターンがパターンNである場合や、図3(C)に示すように、x(n−1)からx(n)の変化パターンがパターンPであり、x(n)からx(n+1)の変化パターンがパターンZである場合についても干渉と判定する態様でもよい。
【0032】
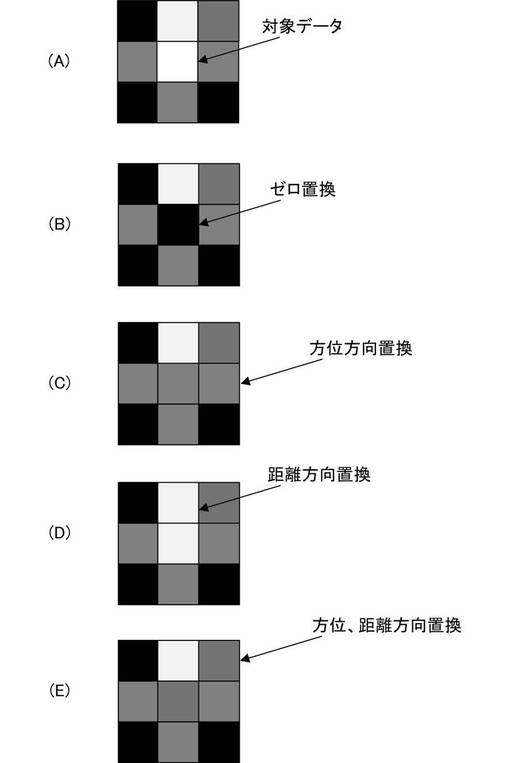
そして、干渉除去処理部154は、干渉検出部153で干渉であると判定されたスイープデータのレベル低減処理を行う。図4(A)は、レベル低減処理前の各サンプルをエコー画像として示した図である。レベル低減処理は、図4(B)に示すように、干渉であると判定した対象データをゼロに置換する処理であってもよいが、以下の様な処理を行ってもよい。
【0033】
例えば、干渉除去処理部154は、図4(C)に示すように、方位方向に隣接する前後いずれかのデータに置換する。このとき、方位方向に隣接する前後のデータの平均値に置換する態様であってもよい。また、干渉除去処理部154は、図4(D)に示すように、距離方向に隣接するデータに置換する処理を行ってもよい。この場合においても、距離方向に隣接する前後のデータの平均値に置換する態様であってもよい。また、図4(E)に示すように、方位方向に隣接する前後いずれかのデータのうち、さらに距離方向に隣接する前後いずれかのデータに置換する態様であってもよい。この場合においても、複数のデータ(例えば4つのデータ)の平均値に置換する態様であってもよい。また、干渉成分のレベルを推定し、干渉成分のレベルだけを減算する処理を行う態様であってもよい。
【0034】
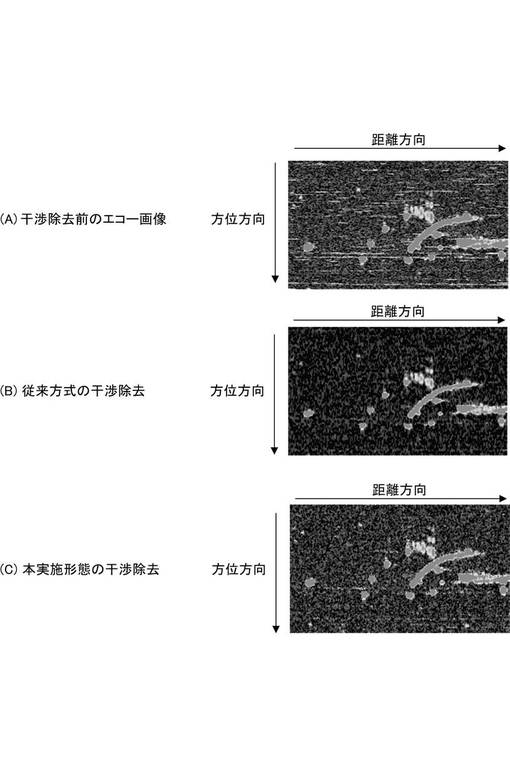
干渉除去処理154は、以上のような処理により、干渉成分を除去し、スイープデータを更新する。図5(A)に示すように、エコー信号に干渉成分が含まれていると、距離方向に細長く延びる高レベルのエコー画像が表示され、表示品質を劣化させてしまう。
【0035】
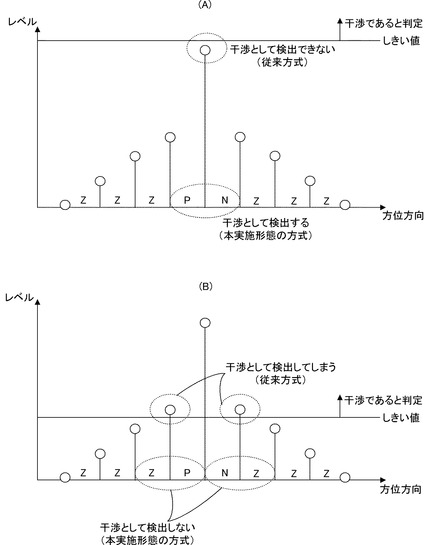
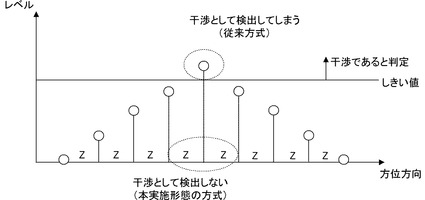
従来の干渉検出処理では、例えば、ある位置のスイープデータがしきい値を超えるか否かで判定するため、図6(A)に示すように、しきい値を高く設定すると干渉を検出することができず、図6(B)に示すように、仮にしきい値を低く設定すると、干渉以外の部分まで干渉であると判定してしまう場合がある。また、図7に示すように、物標からのエコー信号まで干渉として検出してしまう場合もある。
【0036】
また、同じ距離の複数スイープデータのうち、最小値を注目スイープデータに置き換える処理を行った場合も、干渉以外の部分まで除去してしまうおそれがある。したがって、最小値を注目スィープに置き換える処理を行う従来の方式でも、図5(B)に示すように、物標のエコー画像の面積が大きく減少してしまう。
【0037】
一方、本実施形態のレーダ装置では、方位方向に急峻に立ち上がった後に急峻に立ち下がる部分を干渉として検出し、低減処理を行うため、図6(A)および図6(B)に示すように、干渉部分だけを的確に抽出することができる。また、図7に示すように、物標からのエコー信号を干渉として検出するおそれも少ない。したがって、図5(C)に示すように、距離方向に細長く延びる高レベルのエコー画像の部分だけを的確に除去することができる。
【0038】
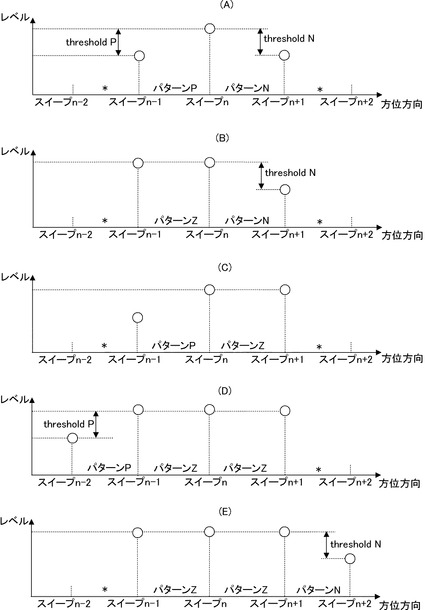
なお、干渉判定に用いるスイープデータ数は3つに限らず、4つ以上であってもよい。例えば、図8や図9に示す様に、方位方向に連続する5つのスイープデータを用いて干渉判定を行う態様も可能である。まず、図8を参照して5つのスイープデータを用いて干渉であると判定するレベル変化パターンについて説明する。
【0039】
干渉検出部153は、図8(A)に示すように、注目スイープの前後のレベル変化が、パターンPからパターンNである場合、他の部分(スイープn−2からスイープn−1、スイープn+1からスイープn+2)のレベル変化に関わらず、3つのスイープデータと同様に干渉であると判定する。同様に、図8(B)に示すように、注目スイープの前後のレベル変化が、パターンZからパターンNである場合、他の部分のレベル変化に関わらず、3つのスイープデータと同様に干渉であると判定し、図8(C)に示すように、注目スイープの前後のレベル変化が、パターンPからパターンZである場合、他の部分のレベル変化に関わらず、3つのスイープデータと同様に干渉であると判定する。
【0040】
また、干渉検出部153は、図8(D)に示すように、注目スイープの前後の変化パターンが、いずれもパターンZであり、スイープデータx(n−2)からスイープデータx(n−1)の変化パターンがパターンPである場合も干渉であると判定する。同様に、図8(E)に示すように、注目スイープの前後の変化パターンが、いずれもパターンZであり、スイープデータx(n+1)からスイープデータx(n+2)の変化パターンがパターンNである場合も干渉であると判定する。これにより、方位方向に同程度のレベルが連続している場合の干渉成分も検出することができる。
【0041】
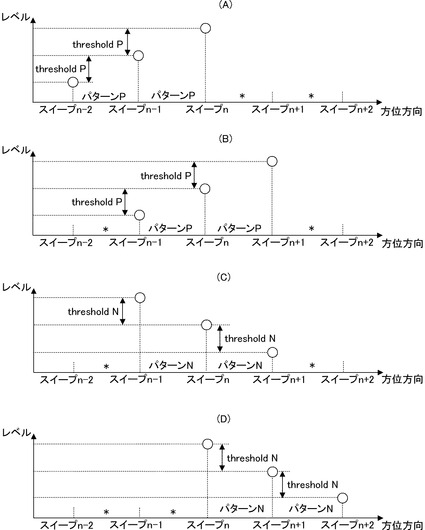
さらに、以下のようにして、方位方向に連続してパターンPやパターンNの変化パターンとなる場合も干渉であると判定してもよい。すなわち、干渉検出部153は、図9(A)に示すように、スイープデータx(n−2)からスイープデータx(n−1)への変化パターンがパターンPであり、かつスイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンPである場合や、図9(B)に示すように、スイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンPであり、かつスイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンPである場合も干渉であると判定する。また、図9(C)に示すように、スイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンNであり、かつスイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンNである場合や、図9(D)に示すように、スイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンNであり、かつスイープデータx(n+1)からスイープデータx(n+2)への変化パターンがパターンNである場合も干渉であると判定する。この場合、方位方向に異なる信号レベルを有する干渉成分を検出することができる。
【0042】
図10を参照して、上記方式の干渉除去の効果について説明する。図10(A)は、干渉除去前のエコー画像である。従来の干渉検出処理(複数スイープにおいて最小値を採用した場合)では、図10(B)に示すように、小さい物標のエコー画像は、ほとんど認識できない状態にまで除去されてしまっている。
【0043】
一方、方位方向の5つのスイープ間のレベル変化から干渉であるか否かを判定する方式では、図10(C)に示すように、干渉部分だけを的確に除去し、小さい物標のエコー画像を認識できるようになっている。
【0044】
なお、干渉の発生頻度に応じて3本のスイープデータで判定を行う場合と、5本のスイープデータで判定を行う場合と、を変化させる態様も可能である。例えば、通常時は5本のスイープデータで判定を行い、方位方向に複数サンプル連続して干渉であると判定した時点で3本のスイープデータの判定に切り換える、等である。
【0045】
上述の実施形態では、方位方向のレベル変化だけを考慮しているが、距離方向のレベルを考慮して判定を行ってもよい。この場合、例えば、以下の数式2に示すようにして距離方向に平均化したサンプルを用いて変化パターンを算出する。
【0046】
【数2】
【0047】
干渉成分は、方位方向には急峻に立ち上がった後に急峻に立ち下がる特性を有するが、距離方向に広いサンプルに渡って高レベルの信号となることが多い。したがって、レベル変化検出部151は、各サンプルのレベル変化を距離方向の信号を用いて平均化し、パターン分類部152は、平均化した後のレベル変化を複数のパターンに分類し、数式2のように、距離方向の複数サンプルで平均化したサンプルを用いた変化パターンを算出することにより、距離方向に短い小さい物標を干渉として誤検出することを防止することができる。
【0048】
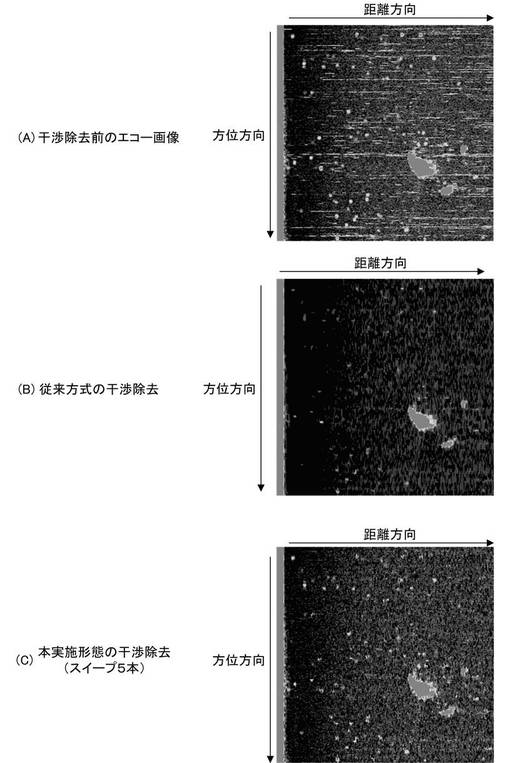
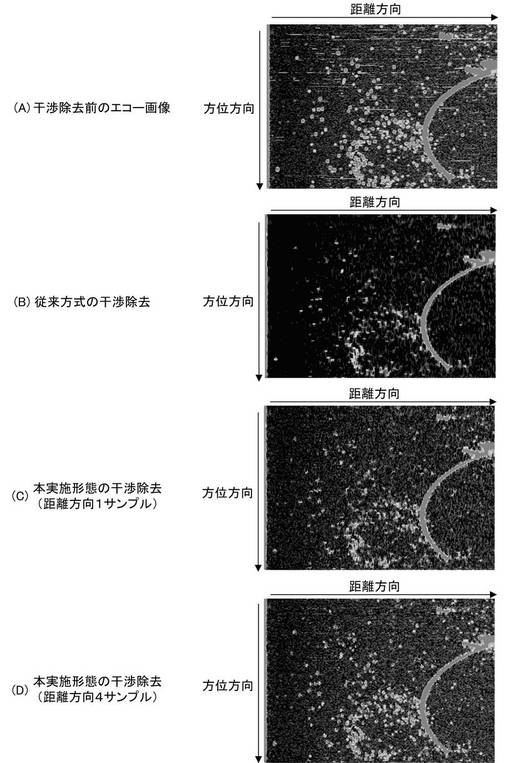
図11を参照して、距離方向を考慮した場合の干渉除去の効果について説明する。図11(A)は、干渉除去前のエコー画像である。従来の干渉検出処理では、図11(B)に示すように、小さい物標のエコー画像は、ほとんど認識できない状態にまで除去されてしまっている。
【0049】
一方、距離方向に1サンプルだけを用いてレベル変化を算出し、パターン分類により干渉検出を行う場合、図11(C)に示すように、従来方式に比べると干渉部分だけを的確に除去し、小さい物標のエコー画像は認識できるようになっている。ここで、さらに、図11(D)に示すように、距離方向に複数サンプル(例えば4サンプル)で平均化したレベル変化を算出し、パターン分類により干渉検出を行うと、より小さい物標のエコー画像まで認識できるようになる。
【0050】
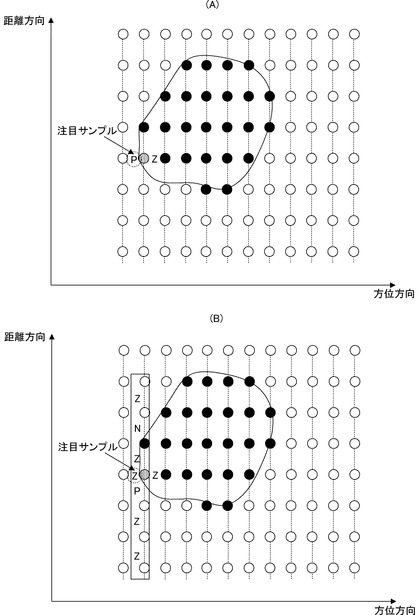
また、図12に示すような距離方向のレベル変化を考慮して判定を行う態様も可能である。この例では、レベル変化検出部151は、まず図12(A)に示すように、隣接する方位方向のレベル変化を検出する。パターン分類部152は、方位方向のレベル変化を複数のパターン(パターンP,N,Z)に分類する。さらに、レベル変化検出部151は、同図(B)に示すように、各方位のサンプルについて、隣接する距離方向のレベル変化をさらに検出する。そして、パターン分類部152は、距離方向のレベル変化を複数のパターン(パターンP,N,Z)に分類する。
【0051】
また、パターン分類部152は、各サンプルについて、複数(例えば前後3つ)の距離方向の変化パターンを参照し、最も多い変化パターンを方位方向の変化パターンとして分類する処理を行う。例えば、図12(A)に示すように、ある注目サンプルについて、1つ前のスイープからの変化パターンがパターンPであったとしても、同図(B)に示すように、距離方向の前後3つの変化パターンのうち、最も多い変化パターンであるパターンZに置き換える処理を行う。その結果、物標のエッジ部分等、方位方向の判定だけでは、干渉であると判定される注目サンプル(パターンP→パターンZ)であったとしても、干渉ではないと判定することができる。
【0052】
さらには、方位方向のレベル変化の判定に加えて、距離方向のレベル変化の判定を行う態様も可能である。例えば、方位方向にパターンP→パターンN、パターンP→パターンZ、またはパターンZ→パターンNと変化する場合で、かつ距離方向にパターンZ→パターンZと変化する場合のサンプルを干渉であると判定する態様である。
【0053】
あるいは、注目サンプルは1点だけでなく、方位方向および距離方向の複数のサンプルを注目サンプルとして、変化パターンの2次元配列態様から干渉であるか否かを判定してもよい。この場合、干渉であると判定する変化パターンの配列態様(リファレンス)をメモリ(不図示)に記憶しおておき、リファレンスとのマッチングによって干渉であるか否かを判定する。このとき、ファジィ推論やニューラルネットワーク等のパターンマッチング手法を用いるようにしてもよい。
【0054】
なお、本実施形態においては、レベル変化のしきい値(thresholdPおよびthresholdN)を固定値であるとして説明したが、適応的に変化させるようにする態様も可能である。例えば、スイープ間でエコー信号のゲインが変更される場合、スイープ間のゲイン差に応じてしきい値を変更する(ゲイン比を考慮したしきい値とする)。
【0055】
また、方位方向や距離方向に隣接するスイープデータのレベル変化を検出したが、例えば1スイープ毎にデータを無視する(間引く)等して、近接したスイープデータ間のレベル変化を検出する態様であってもよい。
【符号の説明】
【0056】
11…アンテナ
12…受信部
13…A/D変換器
14…スイープメモリ
15…干渉処理部
16…画像変換部
17…直交座標メモリ
18…表示器
【技術分野】
【0001】
この発明は、エコー信号に種々の処理を行う信号処理装置に関するものである。
【背景技術】
【0002】
従来、レーダ装置等においては、他船から送信された電磁波(干渉成分)がエコー信号に含まれていると、レーダ画像の表示品質を劣化させるという課題があった。
【0003】
そこで、同一方位および同一距離における時間的に連続する3つ以上の信号のうち、1つ過去のスイープだけ閾値を超える場合に干渉であると判定し、非表示(ゼロ置換)として干渉除去を行うものが提案されている(例えば特許文献1を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平5−27011号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、実際には低レベルの干渉が発生することもあり、閾値を高くして干渉除去処理を弱くすると、干渉を除去しきれないという課題がある。一方で、閾値を低く設定すると物標からのエコー信号まで除去してしまうことがある。
【0006】
そこで、この発明は、干渉以外のエコーに対する抑圧を低減しつつ、干渉成分を的確に除去することができる信号処理装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の信号処理装置は、エコー信号入力部と、エコー信号レベル検出部と、レベル変化検出部と、パターン出力部と、干渉判定部と、を備えている。エコー信号入力部は、アンテナから発射された電磁波の物標からの反射によるエコー信号が入力される。エコー信号レベル検出部は、アンテナからの距離と方位に対応させて前記エコー信号のそれぞれのレベルを検出する。レベル変化検出部は、エコー信号のうち、アンテナからの距離が略等しく方位が異なる、互いに近接する地点からの前記エコー信号間のレベル変化(例えば差分値)を検出する。
【0008】
そして、パターン出力部は、レベル変化をそれぞれあらかじめ定められた基準パターンに照合してレベル変化パターンを出力する。例えば、あるスイープのデータx(n)に対して、次のスイープのデータx(n+1)が大きくなるパターン(第1のパターンP)、あるスイープのデータx(n)に対して、次のスイープのデータx(n+1)が小さくなるパターン(第2のパターンN)、それ以外のパターン(第3のパターンZ)、等に分類する。
【0009】
干渉判定部は、レベル変化パターンのうち少なくとも2つのレベル変化パターンに基づいて干渉を判定する。例えば、注目スイープのデータx(n)の1つ前のスイープデータx(n−1)との変化パターンがパターンPであり、1つ後のスイープデータx(n+1)との変化パターンがパターンNである場合、干渉であると判定する。また、干渉成分は、方位方向に複数連続する場合もあるため、注目スイープのデータx(n)の1つ前のスイープデータx(n−1)との変化パターンがパターンPであり、1つ後のスイープデータx(n+1)との変化パターンがパターンZである場合や、注目スイープのデータx(n)の1つ前のスイープデータx(n−1)との変化パターンがパターンZであり、1つ後のスイープデータx(n+1)との変化パターンがパターンNである場合についても干渉と判定する態様でもよい。
【0010】
これにより、方位方向に急峻に立ち上がり、その後急峻に立ち下がる干渉成分特有のレベル変化パターンを抽出することができる。この場合、従来の様に、ある位置の時間軸上のデータから閾値を超えるか否かで判定する場合よりも干渉成分だけを的確に抽出することができる。
【0011】
さらに、注目スイープと前後スイープの3点だけでなく、より多数のスイープのデータを用いてもよい。例えば、注目スイープのデータx(n)の2つ前のスイープデータx(n−2)から1つ前のスイープデータx(n−1)への変化パターンがパターンPであり、スイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンZであり、スイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンZである場合、干渉と判定する。また、スイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンZであり、スイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンZであり、スイープデータx(n+1)からスイープデータx(n+2)への変化パターンがパターンNである場合も、干渉と判定してもよい。これにより、方位方向に連続する干渉成分の検出を行うことができる。
【0012】
さらに、方位方向に連続する複数のレベル変化のパターンが、連続してパターンPである場合も干渉成分と判定する態様でもよい。例えば、スイープデータx(n−2)からスイープデータx(n−1)への変化パターンがパターンPであり、かつスイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンPである場合や、スイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンPであり、かつスイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンPである場合等である。また、方位方向に連続する複数のレベル変化のパターンが、連続してパターンNである場合も干渉成分と判定する態様でもよい。例えば、スイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンNであり、かつスイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンNである場合や、スイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンNであり、かつスイープデータx(n+1)からスイープデータx(n+2)への変化パターンがパターンNである場合等である。
この場合、方位方向に異なる信号レベルを有する干渉成分を検出することができる。
【0013】
また、本発明の信号処理装置は、距離方向のレベル変化を考慮する態様であってもよい。例えば、レベル変化検出部は、各方位のレベル変化を距離方向の信号を用いて平均化する。この場合、パターン出力部は、平均化した後の前記レベル変化を照合する。あるいは、隣接する距離方向のレベル変化をさらに検出し、所定の距離範囲内のレベル変化パターンのうち、最も多いレベル変化パターンを、各方位および各距離のレベル変化パターンとして出力態様等であってもよい。
【発明の効果】
【0014】
この発明のエコー信号処理装置によれば、干渉以外のエコーに対する抑圧を低減しつつ、干渉成分を的確に除去することができる。
【図面の簡単な説明】
【0015】
【図1】本実施形態のレーダ装置の構成を示すブロック図である。
【図2】スイープ間のレベル変化のパターンを示す図である。
【図3】干渉であると判定するパターンを示す図である。
【図4】レベル低減処理の態様を示す図である。
【図5】エコー画像を示す図である。
【図6】従来の干渉検出と本実施形態の干渉検出との違いを示す図である。
【図7】従来の干渉検出と本実施形態の干渉検出との違いを示す図である。
【図8】方位方向に連続する5つのスイープデータを用いて干渉判定を行う場合の変化パターンを示す図である。
【図9】方位方向に連続する5つのスイープデータを用いて干渉判定を行う場合の変化パターンを示す図である。
【図10】エコー画像を示す図である。
【図11】エコー画像を示す図である。
【図12】距離方向のサンプルを考慮した変化パターンの分類を示す図である。
【発明を実施するための形態】
【0016】
図1(A)は、本発明の信号処理装置を内蔵したレーダ装置の構成を示すブロック図である。レーダ装置は、例えば船舶に設置され、自船の周囲に電磁波を送受信し、他船等の物標を探知する装置である。
【0017】
図1(A)において、レーダ装置は、アンテナ11、受信部12、A/D変換器13、スイープメモリ14、干渉処理部15、画像変換部16、直交座標メモリ17、および表示器18を備えている。
【0018】
アンテナ11は、自船の周囲の各方位に電磁波を送信し、エコー信号を受信する。受信部12は、アンテナ11で受信したエコー信号のレベルに応じた値をA/D変換器13に出力する。A/D変換器13は、入力されたアナログ値のエコー信号をデジタル変換し、測定データとしてスイープメモリ14に出力する。
【0019】
スイープメモリ14は、測定1周期分(自船の周り360度分)の測定データを記憶する。各測定データは、極座標系の方位および距離と対応付けられたサンプルデータ(スイープデータ)として記憶される。
【0020】
画像変換部16は、スイープメモリ14からスイープデータを入力し、自船の位置を原点とした直交座標系に変換して、各スイープデータのレベルに応じた階調の画素輝度値として出力する。この直交座標系の画素輝度値が直交座標データとして直交座標メモリ17に記憶される。
【0021】
表示器18は、直交座標メモリ17に記憶されている直交座標データを読み出し、図5に示すようなレーダ画像(エコー画像)を表示する。なお、本実施形態では、背景色が黒で、画素輝度値が高い画素ほど白く表示される例を示すが、逆に、背景色が白で、画素輝度値が高い画素ほど黒く表示されるようにしてもよい。また、カラー画像として表示される態様であってもよい。
【0022】
アンテナ11が受信するエコー信号には、物標で反射した電磁波以外にも、他船等から発射された電磁波が干渉成分として含まれている場合がある。エコー信号に干渉成分が含まれていると、図5(A)に示すように、距離方向に細長く延びるエコー画像が表示されてしまう。
【0023】
ここで、本実施形態のレーダ装置は、干渉処理部15で干渉成分を検出してレベル低減処理を行い、スイープメモリ14のスイープデータの内容を更新する。その結果、画像変換部16には、干渉低減処理後のスイープデータが入力され、表示器18には干渉成分だけが的確に除去されたエコー画像が表示される。
【0024】
以下、干渉処理部15の処理内容について具体的に説明する。図1(B)は、干渉処理部15の構成を示すブロック図である。干渉処理部15は、レベル変化検出部151、パターン分類部(本発明におけるパターン出力部)152、干渉検出部153、および干渉除去処理部154を備えている。干渉処理部15は、これら構成部により、スイープデータに含まれる干渉成分を検出し、レベル低減処理を行う。
【0025】
レベル変化検出部151は、スイープメモリ14からスイープデータを読み出し、各距離のスイープ間のレベル変化を検出する。あるスイープのサンプルをx(n)、同じ距離の次のスイープのサンプルをx(n+1)とすると、レベル変化検出部151は、スイープ間のレベル差x(n+1)−x(n)を全サンプルについて求める。
【0026】
パターン分類部152は、レベル変化検出部151で求めたスイープ間のレベル変化を複数のパターンに分類する。図2は、スイープ間のレベル変化のパターンを示す図である。図2に示すように、パターン分類部152は、スイープ間のレベル変化を以下の数式1に示すような3つのパターンに分類する。
【0027】
【数1】
【0028】
すなわち、パターン分類部152は、図2(A)に示すように、あるスイープのサンプルx(n)のレベルに対し、次のスイープのサンプルx(n+1)のレベルが所定値以上大きくなるパターン(レベル差が所定のしきい値thresholdPよりも大きい場合)をパターンP(Positive)とする(なお、以下の図中において、thresholdPと記載している箇所は、スイープ間のレベル差がthresholdP以上の値であったとして説明する)。
【0029】
また、図2(B)に示すように、スイープデータx(n)のレベルに対し、スイープデータx(n+1)のレベルが所定値以上小さくなるパターン(レベル差が所定のしきい値thresholdNよりも小さい場合)をパターンN(Negative)とする(ただし、thresholdP>thresholdNとし、以下の図中において、thresholdNと記載している箇所は、スイープ間のレベル差がthresholdN以下の値であったとして説明する)。図2(C)および図2(D)に示すように、これらパターンNにもパターンPにもあてはまらない場合、つまり、スイープ間でのレベル変化が少ない場合は、パターンZとされる。
【0030】
干渉検出部153は、スイープデータの各サンプルについて、パターン分類部152が分類したパターンに基づいて干渉に起因するエコー信号であるか否かの判定を行う。図3は、干渉であると判定するパターンを示す図である。干渉検出部153は、注目スイープデータx(n)について、方位方向に連続する複数のサンプル(この例では前後2つのサンプルを含む3つのサンプル)のレベル変化パターンに基づいて干渉を判定する。例えば、図3(A)に示すように、x(n−1)からx(n)のレベル変化パターンがパターンPであり、x(n)からx(n+1)のレベル変化パターンがパターンNとなる場合、注目スイープデータx(n)が干渉に起因するエコー信号であると判定する。干渉成分は、方位方向に急峻に立ち上がった後に急峻に立ち下がる特性を有する。したがって、干渉検出部153は、干渉成分に特有のレベル変化パターンを抽出することで、干渉成分だけを的確に抽出することができる。
【0031】
また、干渉成分は、方位方向に複数連続する場合もあるため、図3(B)に示すように、x(n−1)からx(n)の変化パターンがパターンZであり、かつx(n)からx(n+1)の変化パターンがパターンNである場合や、図3(C)に示すように、x(n−1)からx(n)の変化パターンがパターンPであり、x(n)からx(n+1)の変化パターンがパターンZである場合についても干渉と判定する態様でもよい。
【0032】
そして、干渉除去処理部154は、干渉検出部153で干渉であると判定されたスイープデータのレベル低減処理を行う。図4(A)は、レベル低減処理前の各サンプルをエコー画像として示した図である。レベル低減処理は、図4(B)に示すように、干渉であると判定した対象データをゼロに置換する処理であってもよいが、以下の様な処理を行ってもよい。
【0033】
例えば、干渉除去処理部154は、図4(C)に示すように、方位方向に隣接する前後いずれかのデータに置換する。このとき、方位方向に隣接する前後のデータの平均値に置換する態様であってもよい。また、干渉除去処理部154は、図4(D)に示すように、距離方向に隣接するデータに置換する処理を行ってもよい。この場合においても、距離方向に隣接する前後のデータの平均値に置換する態様であってもよい。また、図4(E)に示すように、方位方向に隣接する前後いずれかのデータのうち、さらに距離方向に隣接する前後いずれかのデータに置換する態様であってもよい。この場合においても、複数のデータ(例えば4つのデータ)の平均値に置換する態様であってもよい。また、干渉成分のレベルを推定し、干渉成分のレベルだけを減算する処理を行う態様であってもよい。
【0034】
干渉除去処理154は、以上のような処理により、干渉成分を除去し、スイープデータを更新する。図5(A)に示すように、エコー信号に干渉成分が含まれていると、距離方向に細長く延びる高レベルのエコー画像が表示され、表示品質を劣化させてしまう。
【0035】
従来の干渉検出処理では、例えば、ある位置のスイープデータがしきい値を超えるか否かで判定するため、図6(A)に示すように、しきい値を高く設定すると干渉を検出することができず、図6(B)に示すように、仮にしきい値を低く設定すると、干渉以外の部分まで干渉であると判定してしまう場合がある。また、図7に示すように、物標からのエコー信号まで干渉として検出してしまう場合もある。
【0036】
また、同じ距離の複数スイープデータのうち、最小値を注目スイープデータに置き換える処理を行った場合も、干渉以外の部分まで除去してしまうおそれがある。したがって、最小値を注目スィープに置き換える処理を行う従来の方式でも、図5(B)に示すように、物標のエコー画像の面積が大きく減少してしまう。
【0037】
一方、本実施形態のレーダ装置では、方位方向に急峻に立ち上がった後に急峻に立ち下がる部分を干渉として検出し、低減処理を行うため、図6(A)および図6(B)に示すように、干渉部分だけを的確に抽出することができる。また、図7に示すように、物標からのエコー信号を干渉として検出するおそれも少ない。したがって、図5(C)に示すように、距離方向に細長く延びる高レベルのエコー画像の部分だけを的確に除去することができる。
【0038】
なお、干渉判定に用いるスイープデータ数は3つに限らず、4つ以上であってもよい。例えば、図8や図9に示す様に、方位方向に連続する5つのスイープデータを用いて干渉判定を行う態様も可能である。まず、図8を参照して5つのスイープデータを用いて干渉であると判定するレベル変化パターンについて説明する。
【0039】
干渉検出部153は、図8(A)に示すように、注目スイープの前後のレベル変化が、パターンPからパターンNである場合、他の部分(スイープn−2からスイープn−1、スイープn+1からスイープn+2)のレベル変化に関わらず、3つのスイープデータと同様に干渉であると判定する。同様に、図8(B)に示すように、注目スイープの前後のレベル変化が、パターンZからパターンNである場合、他の部分のレベル変化に関わらず、3つのスイープデータと同様に干渉であると判定し、図8(C)に示すように、注目スイープの前後のレベル変化が、パターンPからパターンZである場合、他の部分のレベル変化に関わらず、3つのスイープデータと同様に干渉であると判定する。
【0040】
また、干渉検出部153は、図8(D)に示すように、注目スイープの前後の変化パターンが、いずれもパターンZであり、スイープデータx(n−2)からスイープデータx(n−1)の変化パターンがパターンPである場合も干渉であると判定する。同様に、図8(E)に示すように、注目スイープの前後の変化パターンが、いずれもパターンZであり、スイープデータx(n+1)からスイープデータx(n+2)の変化パターンがパターンNである場合も干渉であると判定する。これにより、方位方向に同程度のレベルが連続している場合の干渉成分も検出することができる。
【0041】
さらに、以下のようにして、方位方向に連続してパターンPやパターンNの変化パターンとなる場合も干渉であると判定してもよい。すなわち、干渉検出部153は、図9(A)に示すように、スイープデータx(n−2)からスイープデータx(n−1)への変化パターンがパターンPであり、かつスイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンPである場合や、図9(B)に示すように、スイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンPであり、かつスイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンPである場合も干渉であると判定する。また、図9(C)に示すように、スイープデータx(n−1)からスイープデータx(n)への変化パターンがパターンNであり、かつスイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンNである場合や、図9(D)に示すように、スイープデータx(n)からスイープデータx(n+1)への変化パターンがパターンNであり、かつスイープデータx(n+1)からスイープデータx(n+2)への変化パターンがパターンNである場合も干渉であると判定する。この場合、方位方向に異なる信号レベルを有する干渉成分を検出することができる。
【0042】
図10を参照して、上記方式の干渉除去の効果について説明する。図10(A)は、干渉除去前のエコー画像である。従来の干渉検出処理(複数スイープにおいて最小値を採用した場合)では、図10(B)に示すように、小さい物標のエコー画像は、ほとんど認識できない状態にまで除去されてしまっている。
【0043】
一方、方位方向の5つのスイープ間のレベル変化から干渉であるか否かを判定する方式では、図10(C)に示すように、干渉部分だけを的確に除去し、小さい物標のエコー画像を認識できるようになっている。
【0044】
なお、干渉の発生頻度に応じて3本のスイープデータで判定を行う場合と、5本のスイープデータで判定を行う場合と、を変化させる態様も可能である。例えば、通常時は5本のスイープデータで判定を行い、方位方向に複数サンプル連続して干渉であると判定した時点で3本のスイープデータの判定に切り換える、等である。
【0045】
上述の実施形態では、方位方向のレベル変化だけを考慮しているが、距離方向のレベルを考慮して判定を行ってもよい。この場合、例えば、以下の数式2に示すようにして距離方向に平均化したサンプルを用いて変化パターンを算出する。
【0046】
【数2】
【0047】
干渉成分は、方位方向には急峻に立ち上がった後に急峻に立ち下がる特性を有するが、距離方向に広いサンプルに渡って高レベルの信号となることが多い。したがって、レベル変化検出部151は、各サンプルのレベル変化を距離方向の信号を用いて平均化し、パターン分類部152は、平均化した後のレベル変化を複数のパターンに分類し、数式2のように、距離方向の複数サンプルで平均化したサンプルを用いた変化パターンを算出することにより、距離方向に短い小さい物標を干渉として誤検出することを防止することができる。
【0048】
図11を参照して、距離方向を考慮した場合の干渉除去の効果について説明する。図11(A)は、干渉除去前のエコー画像である。従来の干渉検出処理では、図11(B)に示すように、小さい物標のエコー画像は、ほとんど認識できない状態にまで除去されてしまっている。
【0049】
一方、距離方向に1サンプルだけを用いてレベル変化を算出し、パターン分類により干渉検出を行う場合、図11(C)に示すように、従来方式に比べると干渉部分だけを的確に除去し、小さい物標のエコー画像は認識できるようになっている。ここで、さらに、図11(D)に示すように、距離方向に複数サンプル(例えば4サンプル)で平均化したレベル変化を算出し、パターン分類により干渉検出を行うと、より小さい物標のエコー画像まで認識できるようになる。
【0050】
また、図12に示すような距離方向のレベル変化を考慮して判定を行う態様も可能である。この例では、レベル変化検出部151は、まず図12(A)に示すように、隣接する方位方向のレベル変化を検出する。パターン分類部152は、方位方向のレベル変化を複数のパターン(パターンP,N,Z)に分類する。さらに、レベル変化検出部151は、同図(B)に示すように、各方位のサンプルについて、隣接する距離方向のレベル変化をさらに検出する。そして、パターン分類部152は、距離方向のレベル変化を複数のパターン(パターンP,N,Z)に分類する。
【0051】
また、パターン分類部152は、各サンプルについて、複数(例えば前後3つ)の距離方向の変化パターンを参照し、最も多い変化パターンを方位方向の変化パターンとして分類する処理を行う。例えば、図12(A)に示すように、ある注目サンプルについて、1つ前のスイープからの変化パターンがパターンPであったとしても、同図(B)に示すように、距離方向の前後3つの変化パターンのうち、最も多い変化パターンであるパターンZに置き換える処理を行う。その結果、物標のエッジ部分等、方位方向の判定だけでは、干渉であると判定される注目サンプル(パターンP→パターンZ)であったとしても、干渉ではないと判定することができる。
【0052】
さらには、方位方向のレベル変化の判定に加えて、距離方向のレベル変化の判定を行う態様も可能である。例えば、方位方向にパターンP→パターンN、パターンP→パターンZ、またはパターンZ→パターンNと変化する場合で、かつ距離方向にパターンZ→パターンZと変化する場合のサンプルを干渉であると判定する態様である。
【0053】
あるいは、注目サンプルは1点だけでなく、方位方向および距離方向の複数のサンプルを注目サンプルとして、変化パターンの2次元配列態様から干渉であるか否かを判定してもよい。この場合、干渉であると判定する変化パターンの配列態様(リファレンス)をメモリ(不図示)に記憶しおておき、リファレンスとのマッチングによって干渉であるか否かを判定する。このとき、ファジィ推論やニューラルネットワーク等のパターンマッチング手法を用いるようにしてもよい。
【0054】
なお、本実施形態においては、レベル変化のしきい値(thresholdPおよびthresholdN)を固定値であるとして説明したが、適応的に変化させるようにする態様も可能である。例えば、スイープ間でエコー信号のゲインが変更される場合、スイープ間のゲイン差に応じてしきい値を変更する(ゲイン比を考慮したしきい値とする)。
【0055】
また、方位方向や距離方向に隣接するスイープデータのレベル変化を検出したが、例えば1スイープ毎にデータを無視する(間引く)等して、近接したスイープデータ間のレベル変化を検出する態様であってもよい。
【符号の説明】
【0056】
11…アンテナ
12…受信部
13…A/D変換器
14…スイープメモリ
15…干渉処理部
16…画像変換部
17…直交座標メモリ
18…表示器
【特許請求の範囲】
【請求項1】
アンテナから発射された電磁波の物標からの反射によるエコー信号が入力されるエコー信号入力部と、
前記アンテナからの距離と方位に対応させて前記エコー信号のそれぞれのレベルを検出するエコー信号レベル検出部と、
前記エコー信号のうち、アンテナからの距離が略等しく方位が異なる、互いに近接する地点からの前記エコー信号間のレベル変化を検出するレベル変化検出部と、
前記レベル変化をそれぞれあらかじめ定められた基準パターンに照合してレベル変化パターンを出力するパターン出力部と、
前記レベル変化パターンのうち少なくとも2つのレベル変化パターンに基づいて干渉を判定する干渉判定部と、
を備えていることを特徴とする信号処理装置。
【請求項2】
請求項1に記載の信号処理装置において、
前記少なくとも2つのレベル変化パターンを出力するために用いる前記エコー信号の地点は、互いに隣接するものであることを特徴とする信号処理装置。
【請求項3】
請求項1または2に記載の信号処理装置において、
前記パターン出力部は、レベル変化が第1のしきい値を超える第1のパターンと、レベル変化が第2のしきい値未満である第2のパターンと、前記第1のパターンにも前記第2のパターンにも当てはまらない第3のパターンと、に分類することを特徴とする信号処理装置。
【請求項4】
請求項3に記載の信号処理装置において、
前記干渉判定部は、レベル変化のパターンが、前記第1のパターンから前記第2のパターンに変化する場合、干渉であると判定することを特徴とする信号処理装置。
【請求項5】
請求項3または請求項4に記載の信号処理装置において、
前記干渉判定部は、レベル変化のパターンが、前記第1のパターンから前記第3のパターンに変化する場合、干渉であると判定することを特徴とする信号処理装置。
【請求項6】
請求項3乃至請求項5のいずれかに記載の信号処理装置において、
前記干渉判定部は、レベル変化のパターンが、前記第3のパターンから前記第2のパターンに変化する場合、干渉であると判定することを特徴とする信号処理装置。
【請求項7】
請求項1乃至請求項6のいずれかに記載の信号処理装置において、
前記レベル変化は、方位方向に隣接するエコー信号のレベルの差分値であることを特徴とする信号処理装置。
【請求項8】
請求項3乃至請求項7のいずれかに記載の信号処理装置において、
前記干渉判定部は、前記第1のパターンに続く前記第3のパターンと、少なくとも2つの前記第3のパターンの群と、が存在する場合に干渉であると判定することを特徴とする信号処理装置。
【請求項9】
請求項3乃至請求項8のいずれかに記載の信号処理装置において、
前記干渉判定部は、少なくとも2つの前記第3のパターンの群と、前記第3のパターンに続く前記第2のパターンと、が存在する場合に干渉であると判定することを特徴とする信号処理装置。
【請求項10】
請求項3乃至請求項9のいずれかに記載の信号処理装置において、
前記干渉判定部は、少なくとも2つの前記第1のパターンの群が存在する場合に、干渉であると判定することを特徴とする信号処理装置。
【請求項11】
請求項3乃至請求項10のいずれかに記載の信号処理装置において、
前記干渉判定部は、少なくとも2つの前記第2のパターンの群が存在する場合に、干渉であると判定することを特徴とする信号処理装置。
【請求項12】
請求項1乃至請求項11のいずれかに記載の信号処理装置において、
前記レベル変化検出部は、前記レベル変化を距離方向に平均化し、
前記パターン出力部は、平均化した後の前記レベル変化を照合することを特徴とする信号処理装置。
【請求項13】
請求項1乃至請求項11のいずれかに記載の信号処理装置において、
前記レベル変化検出部は、アンテナからの方位が略等しく距離が異なる、互いに近接する地点からの前記エコー信号間のレベル変化をさらに検出し、
前記パターン出力部は、所定の距離範囲内のレベル変化パターンのうち、最も多いレベル変化パターンを、各方位および各距離のレベル変化パターンとして出力することを特徴とする信号処理装置。
【請求項14】
請求項1乃至請求項11のいずれかに記載の信号処理装置において、
前記レベル変化検出部は、アンテナからの方位が略等しく距離が異なる、互いに近接する地点からの前記エコー信号間のレベル変化をさらに検出し、
前記干渉判定部は、さらに、距離方向に近接する複数のレベル変化パターンに基づいて干渉を判定することを特徴とする信号処理装置。
【請求項15】
請求項1乃至請求項14のいずれかに記載の信号処理装置において、
干渉に起因するエコー信号のレベルを制御するエコー信号レベル制御手段を備えたことを特徴とする信号処理装置。
【請求項16】
請求項15に記載の信号処理装置において、
前記エコー信号レベル制御手段は、干渉に起因するエコー信号のレベルを、方位方向に隣接するいずれかのエコー信号のレベルに置き換える処理を行うことを特徴とする信号処理装置。
【請求項17】
請求項15に記載の信号処理装置において、
前記エコー信号レベル制御手段は、干渉に起因するエコー信号のレベルを、方位方向に隣接する複数のエコー信号のレベルの平均値に置き換える処理を行うことを特徴とする信号処理装置。
【請求項18】
請求項15に記載の信号処理装置において、
前記エコー信号レベル制御手段は、干渉に起因するエコー信号のレベルを、方位方向に隣接する複数のエコー信号のレベルに応じて線形補間することを特徴とする信号処理装置。
【請求項19】
請求項1乃至請求項18のいずれかに記載の信号処理装置と、
方位毎に電磁波を発射し、エコー信号を受信しながら回転するアンテナと、を備えたレーダ装置。
【請求項20】
アンテナから発射された電磁波の物標からの反射によるエコー信号が入力されるエコー信号入力ステップと、
前記アンテナからの距離と方位に対応させて前記エコー信号のそれぞれのレベルを検出するエコー信号レベル検出ステップと、
前記エコー信号のうち、アンテナからの距離が略等しく方位が異なる、互いに近接する地点からの前記エコー信号間のレベル変化を検出するレベル変化検出ステップと、
前記レベル変化をそれぞれあらかじめ定められた基準パターンに照合してレベル変化パターンを出力するパターン出力ステップと、
前記レベル変化パターンのうち少なくとも2つのレベル変化パターンに基づいて干渉を判定する干渉判定ステップと、
を備えた信号処理方法。
【請求項21】
アンテナから発射された電磁波の物標からの反射によるエコー信号が入力されるエコー信号入力ステップと、
前記アンテナからの距離と方位に対応させて前記エコー信号のそれぞれのレベルを検出するエコー信号レベル検出ステップと、
前記エコー信号のうち、アンテナからの距離が略等しく方位が異なる、互いに近接する地点からの前記エコー信号間のレベル変化を検出するレベル変化検出ステップと、
前記レベル変化をそれぞれあらかじめ定められた基準パターンに照合してレベル変化パターンを出力するパターン出力ステップと、
前記レベル変化パターンのうち少なくとも2つのレベル変化パターンに基づいて干渉を判定する干渉判定ステップと、
をコンピュータに実行させる信号処理プログラム。
【請求項1】
アンテナから発射された電磁波の物標からの反射によるエコー信号が入力されるエコー信号入力部と、
前記アンテナからの距離と方位に対応させて前記エコー信号のそれぞれのレベルを検出するエコー信号レベル検出部と、
前記エコー信号のうち、アンテナからの距離が略等しく方位が異なる、互いに近接する地点からの前記エコー信号間のレベル変化を検出するレベル変化検出部と、
前記レベル変化をそれぞれあらかじめ定められた基準パターンに照合してレベル変化パターンを出力するパターン出力部と、
前記レベル変化パターンのうち少なくとも2つのレベル変化パターンに基づいて干渉を判定する干渉判定部と、
を備えていることを特徴とする信号処理装置。
【請求項2】
請求項1に記載の信号処理装置において、
前記少なくとも2つのレベル変化パターンを出力するために用いる前記エコー信号の地点は、互いに隣接するものであることを特徴とする信号処理装置。
【請求項3】
請求項1または2に記載の信号処理装置において、
前記パターン出力部は、レベル変化が第1のしきい値を超える第1のパターンと、レベル変化が第2のしきい値未満である第2のパターンと、前記第1のパターンにも前記第2のパターンにも当てはまらない第3のパターンと、に分類することを特徴とする信号処理装置。
【請求項4】
請求項3に記載の信号処理装置において、
前記干渉判定部は、レベル変化のパターンが、前記第1のパターンから前記第2のパターンに変化する場合、干渉であると判定することを特徴とする信号処理装置。
【請求項5】
請求項3または請求項4に記載の信号処理装置において、
前記干渉判定部は、レベル変化のパターンが、前記第1のパターンから前記第3のパターンに変化する場合、干渉であると判定することを特徴とする信号処理装置。
【請求項6】
請求項3乃至請求項5のいずれかに記載の信号処理装置において、
前記干渉判定部は、レベル変化のパターンが、前記第3のパターンから前記第2のパターンに変化する場合、干渉であると判定することを特徴とする信号処理装置。
【請求項7】
請求項1乃至請求項6のいずれかに記載の信号処理装置において、
前記レベル変化は、方位方向に隣接するエコー信号のレベルの差分値であることを特徴とする信号処理装置。
【請求項8】
請求項3乃至請求項7のいずれかに記載の信号処理装置において、
前記干渉判定部は、前記第1のパターンに続く前記第3のパターンと、少なくとも2つの前記第3のパターンの群と、が存在する場合に干渉であると判定することを特徴とする信号処理装置。
【請求項9】
請求項3乃至請求項8のいずれかに記載の信号処理装置において、
前記干渉判定部は、少なくとも2つの前記第3のパターンの群と、前記第3のパターンに続く前記第2のパターンと、が存在する場合に干渉であると判定することを特徴とする信号処理装置。
【請求項10】
請求項3乃至請求項9のいずれかに記載の信号処理装置において、
前記干渉判定部は、少なくとも2つの前記第1のパターンの群が存在する場合に、干渉であると判定することを特徴とする信号処理装置。
【請求項11】
請求項3乃至請求項10のいずれかに記載の信号処理装置において、
前記干渉判定部は、少なくとも2つの前記第2のパターンの群が存在する場合に、干渉であると判定することを特徴とする信号処理装置。
【請求項12】
請求項1乃至請求項11のいずれかに記載の信号処理装置において、
前記レベル変化検出部は、前記レベル変化を距離方向に平均化し、
前記パターン出力部は、平均化した後の前記レベル変化を照合することを特徴とする信号処理装置。
【請求項13】
請求項1乃至請求項11のいずれかに記載の信号処理装置において、
前記レベル変化検出部は、アンテナからの方位が略等しく距離が異なる、互いに近接する地点からの前記エコー信号間のレベル変化をさらに検出し、
前記パターン出力部は、所定の距離範囲内のレベル変化パターンのうち、最も多いレベル変化パターンを、各方位および各距離のレベル変化パターンとして出力することを特徴とする信号処理装置。
【請求項14】
請求項1乃至請求項11のいずれかに記載の信号処理装置において、
前記レベル変化検出部は、アンテナからの方位が略等しく距離が異なる、互いに近接する地点からの前記エコー信号間のレベル変化をさらに検出し、
前記干渉判定部は、さらに、距離方向に近接する複数のレベル変化パターンに基づいて干渉を判定することを特徴とする信号処理装置。
【請求項15】
請求項1乃至請求項14のいずれかに記載の信号処理装置において、
干渉に起因するエコー信号のレベルを制御するエコー信号レベル制御手段を備えたことを特徴とする信号処理装置。
【請求項16】
請求項15に記載の信号処理装置において、
前記エコー信号レベル制御手段は、干渉に起因するエコー信号のレベルを、方位方向に隣接するいずれかのエコー信号のレベルに置き換える処理を行うことを特徴とする信号処理装置。
【請求項17】
請求項15に記載の信号処理装置において、
前記エコー信号レベル制御手段は、干渉に起因するエコー信号のレベルを、方位方向に隣接する複数のエコー信号のレベルの平均値に置き換える処理を行うことを特徴とする信号処理装置。
【請求項18】
請求項15に記載の信号処理装置において、
前記エコー信号レベル制御手段は、干渉に起因するエコー信号のレベルを、方位方向に隣接する複数のエコー信号のレベルに応じて線形補間することを特徴とする信号処理装置。
【請求項19】
請求項1乃至請求項18のいずれかに記載の信号処理装置と、
方位毎に電磁波を発射し、エコー信号を受信しながら回転するアンテナと、を備えたレーダ装置。
【請求項20】
アンテナから発射された電磁波の物標からの反射によるエコー信号が入力されるエコー信号入力ステップと、
前記アンテナからの距離と方位に対応させて前記エコー信号のそれぞれのレベルを検出するエコー信号レベル検出ステップと、
前記エコー信号のうち、アンテナからの距離が略等しく方位が異なる、互いに近接する地点からの前記エコー信号間のレベル変化を検出するレベル変化検出ステップと、
前記レベル変化をそれぞれあらかじめ定められた基準パターンに照合してレベル変化パターンを出力するパターン出力ステップと、
前記レベル変化パターンのうち少なくとも2つのレベル変化パターンに基づいて干渉を判定する干渉判定ステップと、
を備えた信号処理方法。
【請求項21】
アンテナから発射された電磁波の物標からの反射によるエコー信号が入力されるエコー信号入力ステップと、
前記アンテナからの距離と方位に対応させて前記エコー信号のそれぞれのレベルを検出するエコー信号レベル検出ステップと、
前記エコー信号のうち、アンテナからの距離が略等しく方位が異なる、互いに近接する地点からの前記エコー信号間のレベル変化を検出するレベル変化検出ステップと、
前記レベル変化をそれぞれあらかじめ定められた基準パターンに照合してレベル変化パターンを出力するパターン出力ステップと、
前記レベル変化パターンのうち少なくとも2つのレベル変化パターンに基づいて干渉を判定する干渉判定ステップと、
をコンピュータに実行させる信号処理プログラム。
【図1】

【図2】
【図3】
【図6】
【図7】
【図8】
【図9】
【図12】
【図4】
【図5】
【図10】
【図11】
【図2】
【図3】
【図6】
【図7】
【図8】
【図9】
【図12】
【図4】
【図5】
【図10】
【図11】
【公開番号】特開2011−252822(P2011−252822A)
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願番号】特願2010−127708(P2010−127708)
【出願日】平成22年6月3日(2010.6.3)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願日】平成22年6月3日(2010.6.3)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
[ Back to top ]