
信号処理装置、レーダ装置、及び信号処理方法
【課題】 車両制御上重要な目標物体を示すピーク信号を高い確度で優先的に抽出する。
【解決手段】 周波数変調が施された送信信号の反射信号を受信して前記送信信号と受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置は、前記ビート信号の周波数スペクトルにおけるピーク信号に基づき目標物体の方位角を検出する方位角検出手段と、所定の方位角範囲及び所定の相対距離範囲に対応するピーク信号を優先的に抽出するピーク信号抽出手段と、前記抽出されたピーク信号から前記目標物体を検出する目標物体検出手段とを有するので、車両制御上重要度の高い方位角範囲及び相対距離範囲にある目標物体を示すピーク信号をもれなく検出できる。
【解決手段】 周波数変調が施された送信信号の反射信号を受信して前記送信信号と受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置は、前記ビート信号の周波数スペクトルにおけるピーク信号に基づき目標物体の方位角を検出する方位角検出手段と、所定の方位角範囲及び所定の相対距離範囲に対応するピーク信号を優先的に抽出するピーク信号抽出手段と、前記抽出されたピーク信号から前記目標物体を検出する目標物体検出手段とを有するので、車両制御上重要度の高い方位角範囲及び相対距離範囲にある目標物体を示すピーク信号をもれなく検出できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、周波数変調された送信信号の目標物体による反射信号を受信して前記送信信号と受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置等に関し、特に、前記ビート信号の周波数スペクトルにおけるピーク信号に基づき目標物体を検出する信号処理装置等に関する。
【背景技術】
【0002】
近年、車両の衝突回避・衝突対応制御における障害物検出手段として、FM−CW(Frequency Modulated-Continuous Wave)式のレーダ装置が車両に搭載されて用いられる。特許文献1には、車載用のFM−CW式レーダ装置の例が記載されている。
【0003】
車載用のFM−CW式レーダ装置は、三角波状の周波数変調信号に従ってミリ波長の連続波(電磁波)に周波数変調を施して探索領域に送信し、目標物体による反射信号を受信する。このとき、反射信号の周波数は目標物体の相対距離に応じた時間的遅延と相対速度に応じたドップラシフトの影響を受けて偏移するので、送受信信号には周波数差が生じる。レーダ装置は、この周波数差を検出するために、送受信信号をミキシングして両者の周波数差に対応する周波数(ビート周波数)を有するビート信号を生成する。
【0004】
ここで、探索領域に相対距離と相対速度のいずれかが異なる複数の目標物体が存在する場合、目標物体ごとに周波数が異なる反射信号が受信信号に含まれる。よって、ビート信号をFFT(高速フーリエ変換)処理して得られる周波数スペクトルでは、目標物体ごとに異なる周波数で極大値が形成される。以下では、極大値を形成するビート信号をピーク信号といい、そのビート周波数をピーク周波数という。
【0005】
レーダ装置は、ピーク信号の位相やピーク周波数を用いて目標物体ごとの方位角、相対距離、及び相対速度を検出して、検出結果を車両の挙動を制御する車両制御装置に出力する。すると、車両制御装置は、検出された複数の目標物体のうち、その相対速度、相対距離、あるいは方位角に基づき衝突の蓋然性の大きさを判断し、衝突が予測される場合に衝突回避動作や乗員保護動作を行う各種アクチュエータを駆動する。
【0006】
ここで、車両制御装置が限られた時間内で衝突の蓋然性を判断できる目標物体の数は、車両制御装置の処理能力に応じて制限される。よって、レーダ装置は、複数のピーク信号が検出された場合には、その全てについての検出結果を車両制御装置に出力するのではなく、車両制御上重要度の高い目標物体の検出結果を優先的に出力する。そのために、レーダ装置は、ビート信号から目標物体の数に応じた数のピーク信号を検出した段階で、かかる目標物体を示すピーク信号を優先的に抽出し、抽出したピーク信号に基づき目標物体を検出する。
【0007】
車両の前方を監視するレーダ装置の場合、衝突の蓋然性が大きい目標物体、すなわち車両正面の近距離に位置する目標物体を重要度の高い目標物体とみなす。そして、かかる目標物体を示すピーク信号の抽出方法は、従来より種々提案されている。
【0008】
その1つめとして、レーダ装置のアンテナパターンによれば車両正面からの反射信号のレベルが最大であることに着目し、レベルの大きいピーク信号を優先的に抽出する方法があげられる。また、2つめとして、目標物体の相対距離が小さいほどピーク周波数が低くなることに着目して、ピーク周波数が低いピーク信号を優先的に抽出する方法があげられる。
【特許文献1】特開平11−271433号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、上記のような従来の方法には次のような問題がある。
【0010】
図1は、レーダ装置と目標物体の位置関係と、各目標物体を示すピーク信号の状態とを説明する図である。ここでは、説明の便宜上、2つの目標物体を示すピーク信号のうちの1つを優先的に抽出する場合を例とする。
【0011】
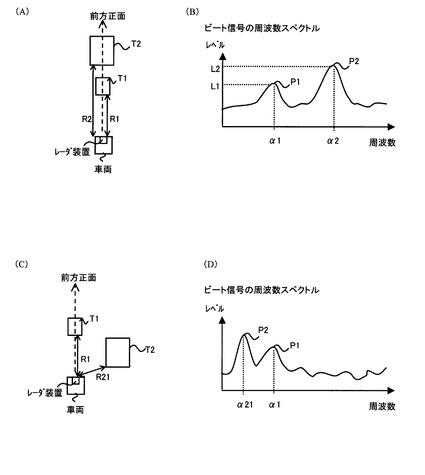
まず、図1(A)に示すように、レーダ装置正面の近距離に目標物体T1(例えば乗用車)が位置し、目標物体T1の前方に反射断面積がさらに大きい目標物体T2(例えば大型のトラック)が位置する場合には、目標物体T1、T2を示すピーク信号は図1(B)に示すようになる。ここで、車両制御上の重要度からすると目標物体T1を優先して抽出すべきであるが、レベルの大きいピーク信号を優先して抽出する方法では、反射断面積が大きい目標物体T2を示すピーク信号P2のレベルL2が目標物体T1を示すピーク信号P1のレベルL1を上回るため、目標物体T2を示すピーク信号P2が優先的に抽出される。
【0012】
この点、ピーク周波数が低いピーク信号を優先的に抽出する方法によれば、目標物体T1の相対距離R1が目標物体T2の相対距離R2より小さいので、ピーク信号P1のピーク周波数α1の方がピーク信号P2の周波数α2より低くなり、したがって、ピーク信号P1が優先して抽出される。しかし、図1(C)に示すように、目標物体T2が例えば隣接車線など至近距離に位置すると、目標物体T2の相対距離R21が目標物体T1の相対距離R1より小さくなる。すると、図1(D)に示すように、ピーク信号P2の周波数α21の方がピーク信号P1の周波数α1より低くなり、ピーク信号P2が優先的に抽出される。
【0013】
このように、従来の方法では、車両制御上の重要度が高い、車両前方正面かつ近距離に位置する目標物体を示すピーク信号が抽出されず、したがってその目標物体が検出されないおそれがある。
【0014】
そこで、本発明の目的は、車両制御上重要な目標物体を示すピーク信号を高い確度で優先的に抽出する信号処理装置等を提供することにある。
【課題を解決するための手段】
【0015】
上記の目的を達成するために、本発明の第1の側面によれば、周波数変調された送信信号の目標物体による反射信号を受信して前記送信信号と受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置であって、前記ビート信号の周波数スペクトルにおけるピーク信号に基づき前記目標物体の方位角を検出する方位角検出手段と、所定の方位角範囲及び前記目標物体の所定の相対距離範囲に対応するピーク信号を優先的に抽出するピーク信号抽出手段と、前記抽出されたピーク信号から前記目標物体を検出する目標物体検出手段とを有する信号処理装置が提供される。
【発明の効果】
【0016】
上記側面によれば、ピーク信号抽出手段が所定の方位角範囲及び所定の相対距離範囲に対応するピーク信号を優先的に抽出するので、車両制御上重要度の高い方位角範囲及び相対距離範囲にある目標物体を示すピーク信号をもれなく検出できる。
【発明を実施するための最良の形態】
【0017】
以下、図面にしたがって本発明の実施の形態について説明する。但し、本発明の技術的範囲はこれらの実施の形態に限定されず、特許請求の範囲に記載された事項とその均等物まで及ぶものである。
【0018】
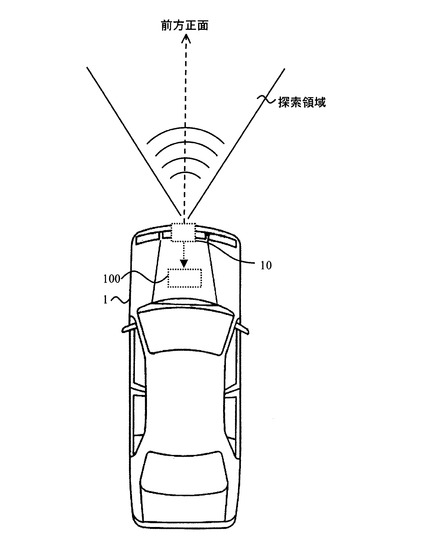
図2は、本発明が適用されるレーダ装置の使用状況を説明する図である。FM−CW式のレーダ装置10は、一例として、車両1の前部フロントグリル内、あるいはバンパー内に搭載され、フロントグリルやバンパー前面に形成されるレドームを透過して車両1前方の探索領域にレーダ信号(電磁波)を送信し、探索領域からの反射信号を受信する。
【0019】
そして、レーダ装置10は、送受信信号からビート信号を生成して、これをマイクロコンピュータなどの信号処理装置により処理することで、探索領域内の目標物体の方位角、相対距離、及び相対速度を検出する。目標物体は、例えば車両1の先行車両、対向車両、あるいは歩行者などである。そして、検出結果に基づいて、車両制御装置100が目標物体との衝突が生じる蓋然性の大きさを判断し、衝突が予測される場合には衝突を回避するように車両1の各種アクチュエータを駆動して車両1の挙動を制御し、または、乗員へ警報を発する警報装置や乗員を保護する安全装置を作動させる。
【0020】
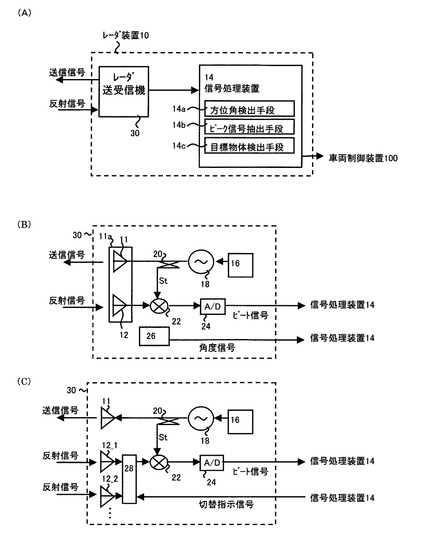
図3は、本実施形態におけるレーダ装置の構成を説明する図である。レーダ装置全体の構成を示す図3(A)において、FM−CW式のレーダ装置10は、周波数変調を施したミリ波長の連続波(電磁波)を送信信号として送信してその反射信号を受信し、送受信信号の周波数差に対応する周波数のビート信号を生成するレーダ送受信機30と、レーダ送受信機30が生成するビート信号を処理する信号処理装置14とを有する。
【0021】
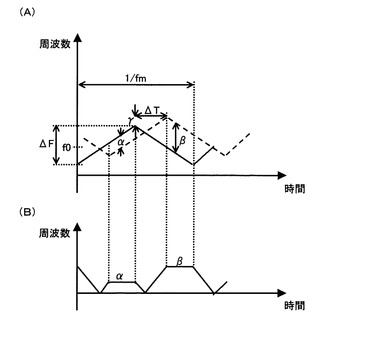
ここで、送信信号と受信信号の周波数変化を図4(A)に示すと、送信信号は、実線で示すように、周波数fm(例えば400Hz)の三角波の周波数変調信号に従って、中心周波数f0(例えば76.5GHz)、周波数変調幅ΔF(例えば200MHz)で周波数が直線的に上昇及び下降する。これに対し、受信信号は、破線で示すように、これを反射した目標物体の相対距離による時間的遅延ΔTと、相対速度に応じたドップ周波数γ分の周波数偏移を受ける。その結果、送受信信号には、送信信号の周波数上昇期間(アップ期間)で周波数差α、周波数下降期間(ダウン期間)で周波数差βが生じる。よって、両者の周波数差に対応する周波数のビート信号のビート周波数は、図4(B)に示すように、アップ期間でビート周波数α、ダウン期間でビート周波数βとなる。そして、この周波数α、βと目標物体の相対距離R、相対速度Vには次の式(1)、(2)で示す関係が成立する。ただし、ここでCは光速である。
【0022】
R=C・(α+β)/(8・ΔF・fm) …式(1)
V=C・(β−α)/(4・f0)…式(2)
図3(A)に戻り、レーダ送受信機30は、メカニカルスキャン式または電子スキャン式により送信信号または受信信号の指向性を変化させ、探索領域をスキャンする。
【0023】
図3(B)は、メカニカルスキャン式を採用した場合のレーダ送受信機30の構成を示す。レーダ送受信機30では、周波数変調指示部16が三角波状の周波数変調信号を生成すると、電圧制御発振器(VCO)18が周波数変調信号に従って図4(A)に示したように三角波の上昇区間で周波数が直線的に上昇し、三角波の下降区間で周波数が直線的に下降する送信信号を出力する。この送信信号は分配器20により電力分配され、その一部が送信アンテナ11から送出される。そして、反射信号が受信用アンテナ12により受信され、受信信号がミキサ22に入力される。ミキサ22は、電力分配された送信信号の一部と受信信号とを混合し、両者の周波数差に対応する周波数のビート信号を生成する。そして、ビート信号は、AD変換器24によりデジタルデータ化され、信号処理装置14に出力される。
【0024】
また、レーダ送受信機30は、送信アンテナ11と受信アンテナ12を備えたアンテナ部11aを往復回動させる機構と、アンテナ部11aの回動角度を検出するエンコーダとを備えた回動部26を有する。回動部26のエンコーダからはアンテナ部11aの回動角度を示す角度信号が信号処理装置14に出力される。信号処理装置14は、角度信号に基づき受信信号を受信したときのアンテナ部11aの角度を検出し、目標物体の方位角を検出する。また、この場合、信号処理装置14は、アンテナ部11が探索領域に対応する角度範囲を片側に1回動して探索領域を1回スキャンする期間を1検出サイクルとして目標物体の検出を行う。
【0025】
図3(C)は、電子スキャン式を採用した場合のレーダ送受信機30の構成を示す。レーダ送受信機30は、反射信号を受信する複数の受信用アンテナ12_1、12_2、…を所定間隔離間して備え、受信用アンテナ12_1、12_2、…による受信信号を、信号処理装置14からの切替指示信号に従って時分割でミキサ22に入力するスイッチ回路28とを有する。ミキサ22は受信用アンテナ12_1、12_2、…それぞれを送信信号と混合して、ビート信号を生成する。
【0026】
この場合、信号処理装置14は、受信信号の利得が最大となるときのアンテナ全体として指向性を求めることにより、その指向性に対応する目標物体の方位角を検出する。具体的には、受信用アンテナ12_1、12_2、…間でのビート信号の位相差を制御してビート信号の合成振幅が最大となるときの位相差を求め、その位相差に対応する方位角を検出する。
【0027】
あるいは、電子スキャン式の一形態である位相モノパルス式では、信号処理装置14は、アンテナ間の受信位相差、つまりアンテナ間でのビート信号の位相差から受信信号の到来方向である目標物体の方位角を直接的に検出する。こうした電子スキャン式では、信号処理装置14は、送信信号のアップ期間とダウン期間を1検出サイクルとして目標物体の検出処理を行う。
【0028】
図3(A)に戻り、信号処理装置14の構成について説明する。信号処理装置14は、デジタルデータ化されたビート信号に対しFFT(高速フーリエ変換)処理を施してその周波数スペクトルを検出するDSP(Digital Signal Processor)などの演算処理装置と、ビート信号の周波数スペクトルを処理して目標物体の位置等をするマイクロコンピュータを有する。このマイクロコンピュータは、CPU(Central Processing Unit)と、CPUが実行する各種処理プログラムや制御プログラムが格納されたROM(Read Only Memory)と、CPUが各種データを一時的に格納するRAM(Random Access Memory)とを有する。よって、ビート信号の周波数スペクトルにおけるピーク信号に基づき、上記のメカニカルスキャン式または電子スキャン式のいずれかにより目標物体の方位角を検出する方位角検出手段14a、所定の方位角範囲及び所定の相対距離範囲に対応するピーク信号を優先的に抽出するピーク信号抽出手段14b、ピーク信号から目標物体を検出する目標物体検出手段14cは、各処理手順を定めたプログラムと、これを実行するCPUにより構成される。
【0029】
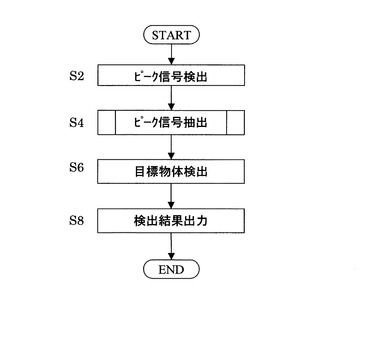
図5は、信号処理装置14のメインの動作手順を説明するフローチャート図である。図5に示す手順は、1検出サイクルごとに実行される。まず、信号処理装置14は、送信信号のアップ期間、ダウン期間ごとにビート信号をFFT処理してその周波数スペクトルを生成し、ピーク信号を検出する(S2)。このとき、ノイズの影響を排除するために、所定レベルの閾値を上回るピーク信号を検出する。また、電子スキャン式の場合には、受信用アンテナ12_1、12_2、…ごとにピーク信号を検出してもよいし、ビート信号を平均することでノイズを平滑化し、平均におけるピーク信号を各アンテナのピーク信号として検出してもよい。
【0030】
そして、信号処理装置14は、詳細な手順は後述するが、検出されたピーク信号から車両制御上重要な目標物体を示すピーク信号を抽出する(S4)。
【0031】
そして、信号処理装置14は、抽出されたピーク信号に基づき目標物体を検出する(S6)。このとき、アップ期間とダウン期間とでピーク信号の対応付けが行われ、それぞれのピーク周波数を用いて上述した式(1)、(2)により目標物体の相対距離、相対速度が検出される。そして、信号処理装置14は、検出結果を車両制御装置100に出力する(S8)。
【0032】
次に、本実施形態におけるピーク信号抽出方法について説明する。
【0033】
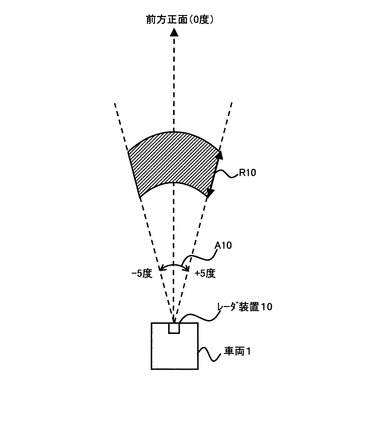
図6は、車両制御上重要な方位角範囲と相対距離範囲を説明する図である。図6には、車両正面を0度とする例えば±5度の方位角範囲A10において、例えば相対距離10メートル〜50メートルの相対距離範囲R10が示される。本実施形態では、図6に示す方位角範囲と相対距離範囲が重複した範囲(ハッチングで図示される)にある目標物体、つまり車両正面かつ近距離に位置する目標物体を衝突の蓋然性が大きい目標物体とみなす。そして、車両の制御に要する時間と目標物体が接近する時間とを考慮した場合に、かかる目標物体を車両制御上最も重要な目標物体とみなす。
【0034】
よって、ピーク信号抽出手段14bが、この方位角範囲A10と相対距離範囲R10とに対応するピーク信号を抽出することで、目標物体検出手段14cがそのピーク信号から重要度の高い目標物体をもれなく検出する。
【0035】
具体的な方法としては、まず方位角検出手段14aが、検出されたピーク信号を用いて方位角を検出する。ここで、メカニカルスキャン式の場合は、方位角検出手段14aは、ピーク信号が得られた受信信号を受信したときのアンテナ部の回動角度に基づき方位角を求める。あるいは、電子スキャン式の場合は、方位角検出手段14aは、受信用アンテナ間で同じピーク周波数を有するピーク信号同士の位相差に基づき、方位角を求める。
【0036】
そして、ピーク信号抽出手段14bが、方位角範囲A10内の方位角が検出されたピーク信号のうち、ピーク周波数が上記の相対距離範囲R10に対応する周波数範囲に含まれるピーク信号を抽出する。このとき、ピーク信号の抽出は、アップ期間のピーク信号とダウン期間のピーク信号のそれぞれにおいて実行される。さらに、電子スキャン式の場合には、受信用アンテナごとのアップ期間のピーク信号とダウン期間のピーク信号のそれぞれにおいて実行される。
【0037】
ここで、相対距離範囲R10に対応する周波数範囲は、予め次のようにして求められ、信号処理装置14のROMに記憶される。すなわち、上述した式(1)、(2)によりアップ期間のピーク周波数とダウン期間のピーク周波数から相対速度と相対距離とが求まることを利用し、上記相対距離範囲R10に加え、車両制御上重要な相対速度範囲(例えば-10メートル/秒〜+10メートル/秒)を特定する。ここで、車両制御上重要な相対速度範囲は、その目標物体を検出してから車両1に接近する時間と、車両1の制御に要する時間とを考慮して、有る程度の大きさ(絶対値)の相対速度範囲に設定される。
【0038】
そして、かかる相対距離範囲と相対速度範囲に対応するピーク周波数の周波数範囲を、次の式(3)〜(6)により逆算する。なお、ここでは、相対距離範囲R10における最小値をR_min、最大値をR_max、相対速度範囲における最小値をV_min、最大値をV_maxとし、アップ期間のピーク周波数に対する周波数範囲をα_min〜α_max、ダウン期間のピーク周波数に対する周波数範囲をβ_min〜β_maxとして算出する。
【0039】
α_min=4・ΔF・fm・R_min/C + 2・f0・V_min/C …式(3)
α_max=4・ΔF・fm・R_max/C + 2・f0・V_max/C …式(4)
β_min=4・ΔF・fm・R_min/C - 2・f0・V_min/C …式(5)
β_max=4・ΔF・fm・R_max/C - 2・f0・V_max/C …式(6)
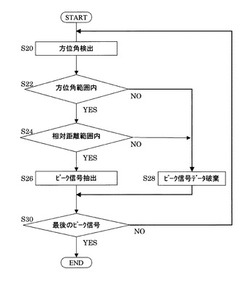
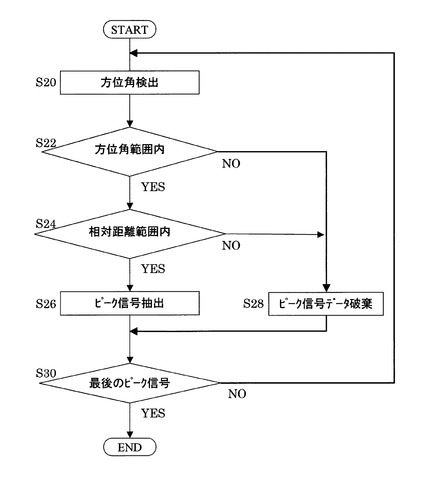
図7は、本実施形態におけるピーク信号抽出処理の詳細な手順を示すフローチャート図である。図7に示す手順は、図5に示した手順S4のサブルーチンに対応する。図7の手順は、図5の手順S2で検出されたアップ期間とダウン期間の全てのピーク信号について実行される。
【0040】
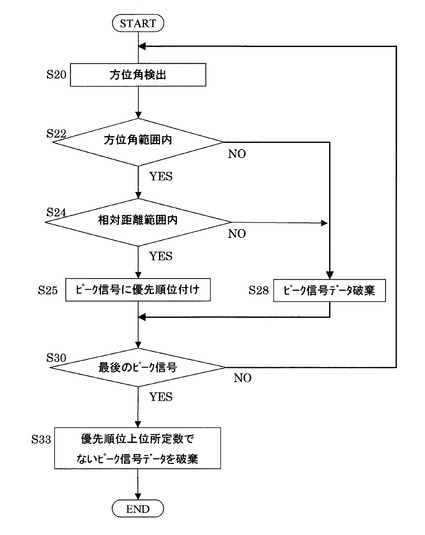
方位角検出手段14aは、全てのピーク信号について、それぞれが示す目標物体の方位角を検出する(S20)。そして、各ピーク信号から検出された方位角が、上記の方位角範囲A10に含まれるか否かを確認する(S22)。方位角範囲A10に含まれる場合には(S22のYES)、そのピーク信号のピーク周波数が上記の相対距離範囲R10に対応する周波数範囲、つまり、アップ期間のピーク信号であれば上記の周波数範囲α_min〜α_max、ダウン期間のピーク信号であれば上記の周波数範囲β_min〜β_maxに含まれるか否かを確認する(S24)。そして、含まれる場合には(S24のYES)、そのピーク信号を抽出する(S26)。なお、手順S22で方位角が方位角範囲A10に含まれない場合(S22のNO)、及び手順S24でピーク周波数が周波数範囲に含まれない場合(S24のNO)には、そのピーク信号のデータを破棄する(S28)。そして、全てのピーク信号について処理が終了したら(S30のYES)、本処理を終了する。
【0041】
このような手順により、ピーク信号抽出手段14bは、車両制御上重要な目標物体を示すピーク信号をもれなく抽出できる。そして、抽出されたピーク信号に基づき、目標物体検出手段が目標物体検出を行う(図5の手順S6)。
【0042】
本実施形態によれば、例えば図1(A)、(B)で示した状況において、優先すべき目標物体T1を示すピーク信号P1の方位角が方位角範囲内A10にあり、さらに相対距離R1に対応するピーク周波数α1が周波数範囲α_min〜α_max(アップ期間の場合)、またはβ_min〜β_max(ダウン期間の場合)にあることを判断できれば、ピーク信号P1を優先的に抽出できる。また、図1(C)、(D)で示した状況においては、目標物体T1を示すピーク信号P1が上記条件を満たすとともに、目標物体T2を示すピーク信号P2から検出される方位角が方位角範囲A10内にないことからピーク信号P2が排除される。よって、ピーク信号P1を優先的に抽出できる。
【0043】
上述では、方位角範囲A10及び相対距離範囲R10に対応するピーク信号を抽出する例について説明したが、次に、相対距離範囲と相対速度範囲の組合せによる相対距離・相対速度範囲を細分化して優先順位を対応づけ、相対速度・相対距離範囲に対応するピーク信号をその相対距離・相対速度範囲の優先順位に基づいて抽出する実施例を説明する。
【0044】
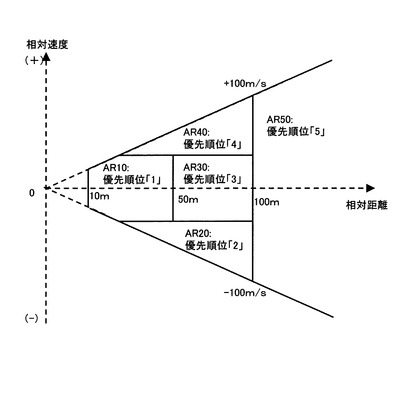
図8は、横軸を相対距離、縦軸を相対速度として、相対距離・相対速度範囲の組合せに対する車両制御上の重要度に応じた優先順位を示す。ここでは、相対距離が小さい順に衝突の蓋然性が大きく、すなわち重要度が高いと判断する。よって、相対距離・相対速度範囲AR10、AR30、AR50は、相対距離が小さい順に優先順位付けされる。
【0045】
また、同じ相対距離範囲に対応する相対距離・相対速度範囲AR20、AR40は、負の相対速度(つまり、接近するときの速度)の方が、正の相対速度(つまり、遠ざかるときの速度)より衝突の蓋然性が大きく、すなわち重要度が高いと判断する。よって、負の相対速度を有する相対距離・相対速度範囲AR20が、正の相対速度を有する相対距離・相対速度範囲AR40に優先される。
【0046】
その結果、相対距離・相対速度範囲AR10は近距離かつある程度の相対速度を有するので衝突の蓋然性が最も大きく、優先順位「1」が付される。次いで、相対距離・相対速度範囲AR20に優先順位「2」、相対距離・相対速度範囲AR30に優先順位「3」、相対距離・相対速度範囲AR40に優先順位「4」、そして、相対距離・相対速度範囲AR50に優先順位「5」が付される。なお、相対距離・相対速度範囲AR10より相対距離が小さい至近距離は、車両制御のタイミング上、不適切であるので、除外されている。
【0047】
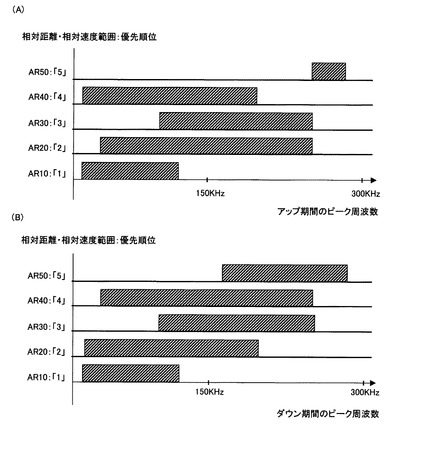
図9は、図8に示す相対距離・相対速度範囲に対応するピーク周波数の周波数範囲を示す図である。図9(A)はアップ期間のピーク周波数について、図9(B)はダウン期間のピーク周波数について、図8に示す相対距離・相対速度範囲に対応する周波数範囲を示す図である。図9(A)、(B)に示す各周波数範囲は、図8の相対距離・相対速度範囲ごとに相対距離の最大値R_maxと最小値R_min、相対速度の最大値V_max、最小値V_minを用いて上述の式(3)〜(6)により算出される。そして、各周波数範囲には、それぞれに対応する相対距離・相対速度範囲に付された優先順位が対応づけられる。本実施例では、このような周波数範囲と優先順位の対応関係のデータが、予め信号処理装置14のROMに格納される。
【0048】
ここで、図9に示す周波数範囲は重複している部分があるので、1つのピーク周波数に対し複数の優先順位が対応する場合がある。よって、その場合にピーク信号を抽出する際の優先順位は、例えば対応する最優先の順位を用いることが可能である。最優先の順位を用いることで安全寄りの判断を行うことができ、ピーク信号の検出漏れを防ぐことができる。
【0049】
図10は、本実施例におけるピーク信号抽出処理の動作手順を説明するフローチャート図である。ここでは、図7で示した手順S24の代わりに、ピーク信号に対しその周波数が含まれる周波数範囲の優先順位に基づき優先順位付けを行う(S25)。
【0050】
そして、優先順位に基づいて上位所定数のピーク信号を抽出して、残りのピーク信号のデータを破棄する(S33)。
【0051】
このように、本実施例によれば、相対速度を考慮に入れた優先順位付けに従い、車両制御上の重要度に応じてピーク信号を抽出することができる。
【0052】
上述のレーダ装置10は、車両の前方監視用のレーダ装置として用いられる場合を例として説明したが、レーダ装置10を車両1の側面に搭載して車両1の側方を監視するために用いたり、車両1の後部に搭載して車両1の後方を監視するために用いたりすることも可能である。あるいは、レーダ装置10を車両1の前側部に搭載して車両1の前側方を監視するために用いたり、車両1の後側部に搭載して車両1の後側方を監視するために用いたりすることも可能である。
【0053】
また、上述の説明における方位角範囲、相対距離範囲、及び相対速度範囲に対する優先順位付けの例のほかにも、車両制御上の重要度に応じた優先順位付けが可能である。
【0054】
以上説明したとおり、本実施の形態によれば、車両制御上重要度の高い方位角範囲及び相対距離範囲にある目標物体を示すピーク信号を抽出することで、重要な目標物体をもれなく検出できる。
【図面の簡単な説明】
【0055】
【図1】レーダ装置と目標物体の位置関係と、各目標物体のピーク信号の状態とを示す図である。
【図2】本発明が適用されるレーダ装置の使用状況を説明する図である。
【図3】本実施形態におけるレーダ装置の構成を説明する図である。
【図4】送信信号と受信信号の周波数変化を説明する図である。
【図5】信号処理装置14の動作手順を説明するフローチャート図である。
【図6】車両制御上重要な方位角範囲と相対距離範囲を説明する図である。
【図7】本実施形態におけるピーク信号抽出処理の詳細な手順を示すフローチャート図である。
【図8】相対距離・相対速度範囲に対する車両制御上の重要度に応じた優先順位を説明する図である。
【図9】図8に示す相対距離・相対速度範囲に対応するピーク周波数の周波数範囲を示す図である。
【図10】本実施例におけるピーク信号抽出処理の動作手順を説明するフローチャート図である。
【符号の説明】
【0056】
1:車両、10:レーダ装置、14:信号処理装置、14a:方位角検出手段、14b:ピーク信号抽出手段、14c:目標物体検出手段、30:レーダ送受信機、100:車両制御装置
【技術分野】
【0001】
本発明は、周波数変調された送信信号の目標物体による反射信号を受信して前記送信信号と受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置等に関し、特に、前記ビート信号の周波数スペクトルにおけるピーク信号に基づき目標物体を検出する信号処理装置等に関する。
【背景技術】
【0002】
近年、車両の衝突回避・衝突対応制御における障害物検出手段として、FM−CW(Frequency Modulated-Continuous Wave)式のレーダ装置が車両に搭載されて用いられる。特許文献1には、車載用のFM−CW式レーダ装置の例が記載されている。
【0003】
車載用のFM−CW式レーダ装置は、三角波状の周波数変調信号に従ってミリ波長の連続波(電磁波)に周波数変調を施して探索領域に送信し、目標物体による反射信号を受信する。このとき、反射信号の周波数は目標物体の相対距離に応じた時間的遅延と相対速度に応じたドップラシフトの影響を受けて偏移するので、送受信信号には周波数差が生じる。レーダ装置は、この周波数差を検出するために、送受信信号をミキシングして両者の周波数差に対応する周波数(ビート周波数)を有するビート信号を生成する。
【0004】
ここで、探索領域に相対距離と相対速度のいずれかが異なる複数の目標物体が存在する場合、目標物体ごとに周波数が異なる反射信号が受信信号に含まれる。よって、ビート信号をFFT(高速フーリエ変換)処理して得られる周波数スペクトルでは、目標物体ごとに異なる周波数で極大値が形成される。以下では、極大値を形成するビート信号をピーク信号といい、そのビート周波数をピーク周波数という。
【0005】
レーダ装置は、ピーク信号の位相やピーク周波数を用いて目標物体ごとの方位角、相対距離、及び相対速度を検出して、検出結果を車両の挙動を制御する車両制御装置に出力する。すると、車両制御装置は、検出された複数の目標物体のうち、その相対速度、相対距離、あるいは方位角に基づき衝突の蓋然性の大きさを判断し、衝突が予測される場合に衝突回避動作や乗員保護動作を行う各種アクチュエータを駆動する。
【0006】
ここで、車両制御装置が限られた時間内で衝突の蓋然性を判断できる目標物体の数は、車両制御装置の処理能力に応じて制限される。よって、レーダ装置は、複数のピーク信号が検出された場合には、その全てについての検出結果を車両制御装置に出力するのではなく、車両制御上重要度の高い目標物体の検出結果を優先的に出力する。そのために、レーダ装置は、ビート信号から目標物体の数に応じた数のピーク信号を検出した段階で、かかる目標物体を示すピーク信号を優先的に抽出し、抽出したピーク信号に基づき目標物体を検出する。
【0007】
車両の前方を監視するレーダ装置の場合、衝突の蓋然性が大きい目標物体、すなわち車両正面の近距離に位置する目標物体を重要度の高い目標物体とみなす。そして、かかる目標物体を示すピーク信号の抽出方法は、従来より種々提案されている。
【0008】
その1つめとして、レーダ装置のアンテナパターンによれば車両正面からの反射信号のレベルが最大であることに着目し、レベルの大きいピーク信号を優先的に抽出する方法があげられる。また、2つめとして、目標物体の相対距離が小さいほどピーク周波数が低くなることに着目して、ピーク周波数が低いピーク信号を優先的に抽出する方法があげられる。
【特許文献1】特開平11−271433号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、上記のような従来の方法には次のような問題がある。
【0010】
図1は、レーダ装置と目標物体の位置関係と、各目標物体を示すピーク信号の状態とを説明する図である。ここでは、説明の便宜上、2つの目標物体を示すピーク信号のうちの1つを優先的に抽出する場合を例とする。
【0011】
まず、図1(A)に示すように、レーダ装置正面の近距離に目標物体T1(例えば乗用車)が位置し、目標物体T1の前方に反射断面積がさらに大きい目標物体T2(例えば大型のトラック)が位置する場合には、目標物体T1、T2を示すピーク信号は図1(B)に示すようになる。ここで、車両制御上の重要度からすると目標物体T1を優先して抽出すべきであるが、レベルの大きいピーク信号を優先して抽出する方法では、反射断面積が大きい目標物体T2を示すピーク信号P2のレベルL2が目標物体T1を示すピーク信号P1のレベルL1を上回るため、目標物体T2を示すピーク信号P2が優先的に抽出される。
【0012】
この点、ピーク周波数が低いピーク信号を優先的に抽出する方法によれば、目標物体T1の相対距離R1が目標物体T2の相対距離R2より小さいので、ピーク信号P1のピーク周波数α1の方がピーク信号P2の周波数α2より低くなり、したがって、ピーク信号P1が優先して抽出される。しかし、図1(C)に示すように、目標物体T2が例えば隣接車線など至近距離に位置すると、目標物体T2の相対距離R21が目標物体T1の相対距離R1より小さくなる。すると、図1(D)に示すように、ピーク信号P2の周波数α21の方がピーク信号P1の周波数α1より低くなり、ピーク信号P2が優先的に抽出される。
【0013】
このように、従来の方法では、車両制御上の重要度が高い、車両前方正面かつ近距離に位置する目標物体を示すピーク信号が抽出されず、したがってその目標物体が検出されないおそれがある。
【0014】
そこで、本発明の目的は、車両制御上重要な目標物体を示すピーク信号を高い確度で優先的に抽出する信号処理装置等を提供することにある。
【課題を解決するための手段】
【0015】
上記の目的を達成するために、本発明の第1の側面によれば、周波数変調された送信信号の目標物体による反射信号を受信して前記送信信号と受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置であって、前記ビート信号の周波数スペクトルにおけるピーク信号に基づき前記目標物体の方位角を検出する方位角検出手段と、所定の方位角範囲及び前記目標物体の所定の相対距離範囲に対応するピーク信号を優先的に抽出するピーク信号抽出手段と、前記抽出されたピーク信号から前記目標物体を検出する目標物体検出手段とを有する信号処理装置が提供される。
【発明の効果】
【0016】
上記側面によれば、ピーク信号抽出手段が所定の方位角範囲及び所定の相対距離範囲に対応するピーク信号を優先的に抽出するので、車両制御上重要度の高い方位角範囲及び相対距離範囲にある目標物体を示すピーク信号をもれなく検出できる。
【発明を実施するための最良の形態】
【0017】
以下、図面にしたがって本発明の実施の形態について説明する。但し、本発明の技術的範囲はこれらの実施の形態に限定されず、特許請求の範囲に記載された事項とその均等物まで及ぶものである。
【0018】
図2は、本発明が適用されるレーダ装置の使用状況を説明する図である。FM−CW式のレーダ装置10は、一例として、車両1の前部フロントグリル内、あるいはバンパー内に搭載され、フロントグリルやバンパー前面に形成されるレドームを透過して車両1前方の探索領域にレーダ信号(電磁波)を送信し、探索領域からの反射信号を受信する。
【0019】
そして、レーダ装置10は、送受信信号からビート信号を生成して、これをマイクロコンピュータなどの信号処理装置により処理することで、探索領域内の目標物体の方位角、相対距離、及び相対速度を検出する。目標物体は、例えば車両1の先行車両、対向車両、あるいは歩行者などである。そして、検出結果に基づいて、車両制御装置100が目標物体との衝突が生じる蓋然性の大きさを判断し、衝突が予測される場合には衝突を回避するように車両1の各種アクチュエータを駆動して車両1の挙動を制御し、または、乗員へ警報を発する警報装置や乗員を保護する安全装置を作動させる。
【0020】
図3は、本実施形態におけるレーダ装置の構成を説明する図である。レーダ装置全体の構成を示す図3(A)において、FM−CW式のレーダ装置10は、周波数変調を施したミリ波長の連続波(電磁波)を送信信号として送信してその反射信号を受信し、送受信信号の周波数差に対応する周波数のビート信号を生成するレーダ送受信機30と、レーダ送受信機30が生成するビート信号を処理する信号処理装置14とを有する。
【0021】
ここで、送信信号と受信信号の周波数変化を図4(A)に示すと、送信信号は、実線で示すように、周波数fm(例えば400Hz)の三角波の周波数変調信号に従って、中心周波数f0(例えば76.5GHz)、周波数変調幅ΔF(例えば200MHz)で周波数が直線的に上昇及び下降する。これに対し、受信信号は、破線で示すように、これを反射した目標物体の相対距離による時間的遅延ΔTと、相対速度に応じたドップ周波数γ分の周波数偏移を受ける。その結果、送受信信号には、送信信号の周波数上昇期間(アップ期間)で周波数差α、周波数下降期間(ダウン期間)で周波数差βが生じる。よって、両者の周波数差に対応する周波数のビート信号のビート周波数は、図4(B)に示すように、アップ期間でビート周波数α、ダウン期間でビート周波数βとなる。そして、この周波数α、βと目標物体の相対距離R、相対速度Vには次の式(1)、(2)で示す関係が成立する。ただし、ここでCは光速である。
【0022】
R=C・(α+β)/(8・ΔF・fm) …式(1)
V=C・(β−α)/(4・f0)…式(2)
図3(A)に戻り、レーダ送受信機30は、メカニカルスキャン式または電子スキャン式により送信信号または受信信号の指向性を変化させ、探索領域をスキャンする。
【0023】
図3(B)は、メカニカルスキャン式を採用した場合のレーダ送受信機30の構成を示す。レーダ送受信機30では、周波数変調指示部16が三角波状の周波数変調信号を生成すると、電圧制御発振器(VCO)18が周波数変調信号に従って図4(A)に示したように三角波の上昇区間で周波数が直線的に上昇し、三角波の下降区間で周波数が直線的に下降する送信信号を出力する。この送信信号は分配器20により電力分配され、その一部が送信アンテナ11から送出される。そして、反射信号が受信用アンテナ12により受信され、受信信号がミキサ22に入力される。ミキサ22は、電力分配された送信信号の一部と受信信号とを混合し、両者の周波数差に対応する周波数のビート信号を生成する。そして、ビート信号は、AD変換器24によりデジタルデータ化され、信号処理装置14に出力される。
【0024】
また、レーダ送受信機30は、送信アンテナ11と受信アンテナ12を備えたアンテナ部11aを往復回動させる機構と、アンテナ部11aの回動角度を検出するエンコーダとを備えた回動部26を有する。回動部26のエンコーダからはアンテナ部11aの回動角度を示す角度信号が信号処理装置14に出力される。信号処理装置14は、角度信号に基づき受信信号を受信したときのアンテナ部11aの角度を検出し、目標物体の方位角を検出する。また、この場合、信号処理装置14は、アンテナ部11が探索領域に対応する角度範囲を片側に1回動して探索領域を1回スキャンする期間を1検出サイクルとして目標物体の検出を行う。
【0025】
図3(C)は、電子スキャン式を採用した場合のレーダ送受信機30の構成を示す。レーダ送受信機30は、反射信号を受信する複数の受信用アンテナ12_1、12_2、…を所定間隔離間して備え、受信用アンテナ12_1、12_2、…による受信信号を、信号処理装置14からの切替指示信号に従って時分割でミキサ22に入力するスイッチ回路28とを有する。ミキサ22は受信用アンテナ12_1、12_2、…それぞれを送信信号と混合して、ビート信号を生成する。
【0026】
この場合、信号処理装置14は、受信信号の利得が最大となるときのアンテナ全体として指向性を求めることにより、その指向性に対応する目標物体の方位角を検出する。具体的には、受信用アンテナ12_1、12_2、…間でのビート信号の位相差を制御してビート信号の合成振幅が最大となるときの位相差を求め、その位相差に対応する方位角を検出する。
【0027】
あるいは、電子スキャン式の一形態である位相モノパルス式では、信号処理装置14は、アンテナ間の受信位相差、つまりアンテナ間でのビート信号の位相差から受信信号の到来方向である目標物体の方位角を直接的に検出する。こうした電子スキャン式では、信号処理装置14は、送信信号のアップ期間とダウン期間を1検出サイクルとして目標物体の検出処理を行う。
【0028】
図3(A)に戻り、信号処理装置14の構成について説明する。信号処理装置14は、デジタルデータ化されたビート信号に対しFFT(高速フーリエ変換)処理を施してその周波数スペクトルを検出するDSP(Digital Signal Processor)などの演算処理装置と、ビート信号の周波数スペクトルを処理して目標物体の位置等をするマイクロコンピュータを有する。このマイクロコンピュータは、CPU(Central Processing Unit)と、CPUが実行する各種処理プログラムや制御プログラムが格納されたROM(Read Only Memory)と、CPUが各種データを一時的に格納するRAM(Random Access Memory)とを有する。よって、ビート信号の周波数スペクトルにおけるピーク信号に基づき、上記のメカニカルスキャン式または電子スキャン式のいずれかにより目標物体の方位角を検出する方位角検出手段14a、所定の方位角範囲及び所定の相対距離範囲に対応するピーク信号を優先的に抽出するピーク信号抽出手段14b、ピーク信号から目標物体を検出する目標物体検出手段14cは、各処理手順を定めたプログラムと、これを実行するCPUにより構成される。
【0029】
図5は、信号処理装置14のメインの動作手順を説明するフローチャート図である。図5に示す手順は、1検出サイクルごとに実行される。まず、信号処理装置14は、送信信号のアップ期間、ダウン期間ごとにビート信号をFFT処理してその周波数スペクトルを生成し、ピーク信号を検出する(S2)。このとき、ノイズの影響を排除するために、所定レベルの閾値を上回るピーク信号を検出する。また、電子スキャン式の場合には、受信用アンテナ12_1、12_2、…ごとにピーク信号を検出してもよいし、ビート信号を平均することでノイズを平滑化し、平均におけるピーク信号を各アンテナのピーク信号として検出してもよい。
【0030】
そして、信号処理装置14は、詳細な手順は後述するが、検出されたピーク信号から車両制御上重要な目標物体を示すピーク信号を抽出する(S4)。
【0031】
そして、信号処理装置14は、抽出されたピーク信号に基づき目標物体を検出する(S6)。このとき、アップ期間とダウン期間とでピーク信号の対応付けが行われ、それぞれのピーク周波数を用いて上述した式(1)、(2)により目標物体の相対距離、相対速度が検出される。そして、信号処理装置14は、検出結果を車両制御装置100に出力する(S8)。
【0032】
次に、本実施形態におけるピーク信号抽出方法について説明する。
【0033】
図6は、車両制御上重要な方位角範囲と相対距離範囲を説明する図である。図6には、車両正面を0度とする例えば±5度の方位角範囲A10において、例えば相対距離10メートル〜50メートルの相対距離範囲R10が示される。本実施形態では、図6に示す方位角範囲と相対距離範囲が重複した範囲(ハッチングで図示される)にある目標物体、つまり車両正面かつ近距離に位置する目標物体を衝突の蓋然性が大きい目標物体とみなす。そして、車両の制御に要する時間と目標物体が接近する時間とを考慮した場合に、かかる目標物体を車両制御上最も重要な目標物体とみなす。
【0034】
よって、ピーク信号抽出手段14bが、この方位角範囲A10と相対距離範囲R10とに対応するピーク信号を抽出することで、目標物体検出手段14cがそのピーク信号から重要度の高い目標物体をもれなく検出する。
【0035】
具体的な方法としては、まず方位角検出手段14aが、検出されたピーク信号を用いて方位角を検出する。ここで、メカニカルスキャン式の場合は、方位角検出手段14aは、ピーク信号が得られた受信信号を受信したときのアンテナ部の回動角度に基づき方位角を求める。あるいは、電子スキャン式の場合は、方位角検出手段14aは、受信用アンテナ間で同じピーク周波数を有するピーク信号同士の位相差に基づき、方位角を求める。
【0036】
そして、ピーク信号抽出手段14bが、方位角範囲A10内の方位角が検出されたピーク信号のうち、ピーク周波数が上記の相対距離範囲R10に対応する周波数範囲に含まれるピーク信号を抽出する。このとき、ピーク信号の抽出は、アップ期間のピーク信号とダウン期間のピーク信号のそれぞれにおいて実行される。さらに、電子スキャン式の場合には、受信用アンテナごとのアップ期間のピーク信号とダウン期間のピーク信号のそれぞれにおいて実行される。
【0037】
ここで、相対距離範囲R10に対応する周波数範囲は、予め次のようにして求められ、信号処理装置14のROMに記憶される。すなわち、上述した式(1)、(2)によりアップ期間のピーク周波数とダウン期間のピーク周波数から相対速度と相対距離とが求まることを利用し、上記相対距離範囲R10に加え、車両制御上重要な相対速度範囲(例えば-10メートル/秒〜+10メートル/秒)を特定する。ここで、車両制御上重要な相対速度範囲は、その目標物体を検出してから車両1に接近する時間と、車両1の制御に要する時間とを考慮して、有る程度の大きさ(絶対値)の相対速度範囲に設定される。
【0038】
そして、かかる相対距離範囲と相対速度範囲に対応するピーク周波数の周波数範囲を、次の式(3)〜(6)により逆算する。なお、ここでは、相対距離範囲R10における最小値をR_min、最大値をR_max、相対速度範囲における最小値をV_min、最大値をV_maxとし、アップ期間のピーク周波数に対する周波数範囲をα_min〜α_max、ダウン期間のピーク周波数に対する周波数範囲をβ_min〜β_maxとして算出する。
【0039】
α_min=4・ΔF・fm・R_min/C + 2・f0・V_min/C …式(3)
α_max=4・ΔF・fm・R_max/C + 2・f0・V_max/C …式(4)
β_min=4・ΔF・fm・R_min/C - 2・f0・V_min/C …式(5)
β_max=4・ΔF・fm・R_max/C - 2・f0・V_max/C …式(6)
図7は、本実施形態におけるピーク信号抽出処理の詳細な手順を示すフローチャート図である。図7に示す手順は、図5に示した手順S4のサブルーチンに対応する。図7の手順は、図5の手順S2で検出されたアップ期間とダウン期間の全てのピーク信号について実行される。
【0040】
方位角検出手段14aは、全てのピーク信号について、それぞれが示す目標物体の方位角を検出する(S20)。そして、各ピーク信号から検出された方位角が、上記の方位角範囲A10に含まれるか否かを確認する(S22)。方位角範囲A10に含まれる場合には(S22のYES)、そのピーク信号のピーク周波数が上記の相対距離範囲R10に対応する周波数範囲、つまり、アップ期間のピーク信号であれば上記の周波数範囲α_min〜α_max、ダウン期間のピーク信号であれば上記の周波数範囲β_min〜β_maxに含まれるか否かを確認する(S24)。そして、含まれる場合には(S24のYES)、そのピーク信号を抽出する(S26)。なお、手順S22で方位角が方位角範囲A10に含まれない場合(S22のNO)、及び手順S24でピーク周波数が周波数範囲に含まれない場合(S24のNO)には、そのピーク信号のデータを破棄する(S28)。そして、全てのピーク信号について処理が終了したら(S30のYES)、本処理を終了する。
【0041】
このような手順により、ピーク信号抽出手段14bは、車両制御上重要な目標物体を示すピーク信号をもれなく抽出できる。そして、抽出されたピーク信号に基づき、目標物体検出手段が目標物体検出を行う(図5の手順S6)。
【0042】
本実施形態によれば、例えば図1(A)、(B)で示した状況において、優先すべき目標物体T1を示すピーク信号P1の方位角が方位角範囲内A10にあり、さらに相対距離R1に対応するピーク周波数α1が周波数範囲α_min〜α_max(アップ期間の場合)、またはβ_min〜β_max(ダウン期間の場合)にあることを判断できれば、ピーク信号P1を優先的に抽出できる。また、図1(C)、(D)で示した状況においては、目標物体T1を示すピーク信号P1が上記条件を満たすとともに、目標物体T2を示すピーク信号P2から検出される方位角が方位角範囲A10内にないことからピーク信号P2が排除される。よって、ピーク信号P1を優先的に抽出できる。
【0043】
上述では、方位角範囲A10及び相対距離範囲R10に対応するピーク信号を抽出する例について説明したが、次に、相対距離範囲と相対速度範囲の組合せによる相対距離・相対速度範囲を細分化して優先順位を対応づけ、相対速度・相対距離範囲に対応するピーク信号をその相対距離・相対速度範囲の優先順位に基づいて抽出する実施例を説明する。
【0044】
図8は、横軸を相対距離、縦軸を相対速度として、相対距離・相対速度範囲の組合せに対する車両制御上の重要度に応じた優先順位を示す。ここでは、相対距離が小さい順に衝突の蓋然性が大きく、すなわち重要度が高いと判断する。よって、相対距離・相対速度範囲AR10、AR30、AR50は、相対距離が小さい順に優先順位付けされる。
【0045】
また、同じ相対距離範囲に対応する相対距離・相対速度範囲AR20、AR40は、負の相対速度(つまり、接近するときの速度)の方が、正の相対速度(つまり、遠ざかるときの速度)より衝突の蓋然性が大きく、すなわち重要度が高いと判断する。よって、負の相対速度を有する相対距離・相対速度範囲AR20が、正の相対速度を有する相対距離・相対速度範囲AR40に優先される。
【0046】
その結果、相対距離・相対速度範囲AR10は近距離かつある程度の相対速度を有するので衝突の蓋然性が最も大きく、優先順位「1」が付される。次いで、相対距離・相対速度範囲AR20に優先順位「2」、相対距離・相対速度範囲AR30に優先順位「3」、相対距離・相対速度範囲AR40に優先順位「4」、そして、相対距離・相対速度範囲AR50に優先順位「5」が付される。なお、相対距離・相対速度範囲AR10より相対距離が小さい至近距離は、車両制御のタイミング上、不適切であるので、除外されている。
【0047】
図9は、図8に示す相対距離・相対速度範囲に対応するピーク周波数の周波数範囲を示す図である。図9(A)はアップ期間のピーク周波数について、図9(B)はダウン期間のピーク周波数について、図8に示す相対距離・相対速度範囲に対応する周波数範囲を示す図である。図9(A)、(B)に示す各周波数範囲は、図8の相対距離・相対速度範囲ごとに相対距離の最大値R_maxと最小値R_min、相対速度の最大値V_max、最小値V_minを用いて上述の式(3)〜(6)により算出される。そして、各周波数範囲には、それぞれに対応する相対距離・相対速度範囲に付された優先順位が対応づけられる。本実施例では、このような周波数範囲と優先順位の対応関係のデータが、予め信号処理装置14のROMに格納される。
【0048】
ここで、図9に示す周波数範囲は重複している部分があるので、1つのピーク周波数に対し複数の優先順位が対応する場合がある。よって、その場合にピーク信号を抽出する際の優先順位は、例えば対応する最優先の順位を用いることが可能である。最優先の順位を用いることで安全寄りの判断を行うことができ、ピーク信号の検出漏れを防ぐことができる。
【0049】
図10は、本実施例におけるピーク信号抽出処理の動作手順を説明するフローチャート図である。ここでは、図7で示した手順S24の代わりに、ピーク信号に対しその周波数が含まれる周波数範囲の優先順位に基づき優先順位付けを行う(S25)。
【0050】
そして、優先順位に基づいて上位所定数のピーク信号を抽出して、残りのピーク信号のデータを破棄する(S33)。
【0051】
このように、本実施例によれば、相対速度を考慮に入れた優先順位付けに従い、車両制御上の重要度に応じてピーク信号を抽出することができる。
【0052】
上述のレーダ装置10は、車両の前方監視用のレーダ装置として用いられる場合を例として説明したが、レーダ装置10を車両1の側面に搭載して車両1の側方を監視するために用いたり、車両1の後部に搭載して車両1の後方を監視するために用いたりすることも可能である。あるいは、レーダ装置10を車両1の前側部に搭載して車両1の前側方を監視するために用いたり、車両1の後側部に搭載して車両1の後側方を監視するために用いたりすることも可能である。
【0053】
また、上述の説明における方位角範囲、相対距離範囲、及び相対速度範囲に対する優先順位付けの例のほかにも、車両制御上の重要度に応じた優先順位付けが可能である。
【0054】
以上説明したとおり、本実施の形態によれば、車両制御上重要度の高い方位角範囲及び相対距離範囲にある目標物体を示すピーク信号を抽出することで、重要な目標物体をもれなく検出できる。
【図面の簡単な説明】
【0055】
【図1】レーダ装置と目標物体の位置関係と、各目標物体のピーク信号の状態とを示す図である。
【図2】本発明が適用されるレーダ装置の使用状況を説明する図である。
【図3】本実施形態におけるレーダ装置の構成を説明する図である。
【図4】送信信号と受信信号の周波数変化を説明する図である。
【図5】信号処理装置14の動作手順を説明するフローチャート図である。
【図6】車両制御上重要な方位角範囲と相対距離範囲を説明する図である。
【図7】本実施形態におけるピーク信号抽出処理の詳細な手順を示すフローチャート図である。
【図8】相対距離・相対速度範囲に対する車両制御上の重要度に応じた優先順位を説明する図である。
【図9】図8に示す相対距離・相対速度範囲に対応するピーク周波数の周波数範囲を示す図である。
【図10】本実施例におけるピーク信号抽出処理の動作手順を説明するフローチャート図である。
【符号の説明】
【0056】
1:車両、10:レーダ装置、14:信号処理装置、14a:方位角検出手段、14b:ピーク信号抽出手段、14c:目標物体検出手段、30:レーダ送受信機、100:車両制御装置
【特許請求の範囲】
【請求項1】
周波数変調された送信信号の目標物体による反射信号を受信して前記送信信号と受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置であって、
前記ビート信号の周波数スペクトルにおけるピーク信号に基づき前記目標物体の方位角を検出する方位角検出手段と、
所定の方位角範囲及び前記目標物体の所定の相対距離範囲に対応するピーク信号を優先的に抽出するピーク信号抽出手段と、
前記抽出されたピーク信号から前記目標物体を検出する目標物体検出手段とを有する信号処理装置。
【請求項2】
請求項1において、
前記ピーク信号抽出手段は、第1の相対距離範囲に対応するピーク信号を前記第1の相対距離範囲より大きい第2の相対距離範囲に対応するピーク信号より優先的に抽出することを特徴とする信号処理装置。
【請求項3】
請求項1において、
前記ピーク信号抽出手段は、前記所定の方位角範囲及び前記所定の相対距離範囲に対応するピーク信号であってさらに前記目標物体の所定の相対速度範囲に対応するピーク信号を優先的に抽出することを特徴とする信号処理装置。
【請求項4】
請求項1乃至3のいずれかに記載されたレーダ送受信機と信号処理装置とを備えたレーダ装置。
【請求項5】
周波数変調された送信信号の目標物体による反射信号を受信するレーダ送受信機にて生成される前記送信信号と受信信号の周波数差を有するビート信号の信号処理方法であって、
前記ビート信号の周波数スペクトルにおけるピーク信号に基づき前記目標物体の方位角を検出する方位角検出工程と、
所定の方位角範囲及び前記目標物体の所定の相対距離範囲に対応するピーク信号を優先的に抽出するピーク信号抽出工程と、
前記抽出されたピーク信号から前記目標物体を検出する目標物体検出工程とを有する信号処理方法。
【請求項1】
周波数変調された送信信号の目標物体による反射信号を受信して前記送信信号と受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置であって、
前記ビート信号の周波数スペクトルにおけるピーク信号に基づき前記目標物体の方位角を検出する方位角検出手段と、
所定の方位角範囲及び前記目標物体の所定の相対距離範囲に対応するピーク信号を優先的に抽出するピーク信号抽出手段と、
前記抽出されたピーク信号から前記目標物体を検出する目標物体検出手段とを有する信号処理装置。
【請求項2】
請求項1において、
前記ピーク信号抽出手段は、第1の相対距離範囲に対応するピーク信号を前記第1の相対距離範囲より大きい第2の相対距離範囲に対応するピーク信号より優先的に抽出することを特徴とする信号処理装置。
【請求項3】
請求項1において、
前記ピーク信号抽出手段は、前記所定の方位角範囲及び前記所定の相対距離範囲に対応するピーク信号であってさらに前記目標物体の所定の相対速度範囲に対応するピーク信号を優先的に抽出することを特徴とする信号処理装置。
【請求項4】
請求項1乃至3のいずれかに記載されたレーダ送受信機と信号処理装置とを備えたレーダ装置。
【請求項5】
周波数変調された送信信号の目標物体による反射信号を受信するレーダ送受信機にて生成される前記送信信号と受信信号の周波数差を有するビート信号の信号処理方法であって、
前記ビート信号の周波数スペクトルにおけるピーク信号に基づき前記目標物体の方位角を検出する方位角検出工程と、
所定の方位角範囲及び前記目標物体の所定の相対距離範囲に対応するピーク信号を優先的に抽出するピーク信号抽出工程と、
前記抽出されたピーク信号から前記目標物体を検出する目標物体検出工程とを有する信号処理方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−38704(P2010−38704A)
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願番号】特願2008−201379(P2008−201379)
【出願日】平成20年8月5日(2008.8.5)
【出願人】(000237592)富士通テン株式会社 (3,383)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願日】平成20年8月5日(2008.8.5)
【出願人】(000237592)富士通テン株式会社 (3,383)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]