
信号処理装置、及びレーダ装置
【課題】 個々のピーク信号グループが目標物体ごとに検出されたか否かを判断し、目標物体の誤検出や検出もれを回避する。
【解決手段】 周波数変調したレーダ信号を探索領域内の方位角ごとに送受信し、送受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置は、方位角ごとにビート信号の周波数スペクトルにおけるピーク信号を検出し、隣接する複数の方位角で周波数が一致または近似し、かつ極大値を形成するピーク信号グループを検出し、前記ピーク信号グループに基づき相対距離もしくは相対速度、及び方位角を含む目標物体情報を検出する際に、前記探索領域の撮影画像から認識された前記目標物体の方位角に複数のピーク信号グループの方位角が対応する場合には、当該複数のピーク信号グループにおける代表ピーク信号グループに基づき前記目標物体情報を検出する。
【解決手段】 周波数変調したレーダ信号を探索領域内の方位角ごとに送受信し、送受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置は、方位角ごとにビート信号の周波数スペクトルにおけるピーク信号を検出し、隣接する複数の方位角で周波数が一致または近似し、かつ極大値を形成するピーク信号グループを検出し、前記ピーク信号グループに基づき相対距離もしくは相対速度、及び方位角を含む目標物体情報を検出する際に、前記探索領域の撮影画像から認識された前記目標物体の方位角に複数のピーク信号グループの方位角が対応する場合には、当該複数のピーク信号グループにおける代表ピーク信号グループに基づき前記目標物体情報を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、探索領域内の方位角ごとにレーダ信号を送受信し、送受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置等に関し、特に、方位角ごとにビート信号の周波数スペクトルにおけるピーク信号を検出して、複数の方位角で周波数が一致または近似し、かつ極大値を形成するピーク信号グループに基づき目標物体情報を検出する信号処理装置等に関する。
【背景技術】
【0002】
車両走行の自動制御を支援する車載用レーダ装置は、目標物体の相対速度、相対距離、及び方位角といった目標物体情報を検出し、車両の制御装置に出力することが求められる。レーダ装置が目標物体の相対速度、相対距離を検出する方法として、FM−CW(Frequency Modulated Continuous Wave)方式が知られている。
【0003】
FM−CW方式のレーダ装置は、周波数が直線的な上昇と下降とを交互に繰り返すように周波数変調した電磁波をレーダ信号として探索領域に送信し、目標物体からの反射信号を受信する。このとき、反射信号の周波数は、目標物体の相対距離に応じた時間的遅延と相対速度に応じたドップラシフトの影響を受けて偏移する。よってレーダ装置は、送受信信号の周波数差を解析することにより、目標物体の相対速度と相対距離を検出する。
【0004】
また、レーダ装置が目標物体の方位角を検出する方法として、アンテナを機械的に回動させることにより探索領域内の方位角ごとにレーダ信号を送受信し、受信時のアンテナの回動角度に基づいて目標物体の方位角を検出するメカニカルスキャン方式が知られている。車載用レーダ装置においては、FM−CW方式とメカニカルスキャン方式とが組み合わせて用いられる。
【0005】
かかるレーダ装置は、まず方位角ごとに送信信号と受信信号とを乗算し、送受信信号の周波数差を有するビート信号を生成する。上述したように、ビート信号の周波数(ビート周波数)は反射信号を反射した物体の相対速度、相対距離に応じて異なるので、路面などによる反射信号から得られたビート信号と目標物体による反射信号から得られたビート信号とを分離するために、レーダ装置は方位角ごとにビート信号の周波数スペクトルを検出し、さらにその周波数スペクトルからピーク信号を検出する。
【0006】
すると、方位角方向にある程度の反射断面積を有する目標物体からは、隣接する複数の方位角においてその目標物体の相対速度、相対距離を反映したビート周波数を有し、かつ分布形状の中心付近で極大値を形成するピーク信号グループが検出される。
【0007】
かかるピーク信号グループは単一の目標物体から得られた蓋然性が大きいことから、レーダ装置はピーク信号グループに基づいて目標物体の相対速度、相対距離、及び方位角を検出する。このようにして目標物体情報を検出する車載用レーダ装置の例が、特許文献1に記載されている。
【特許文献1】特開2003−149325号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、上記のような車載用のレーダ装置においては、次のような問題が生じる。まず、目標物体の反射断面積の形状によっては、単一の目標物体から複数のピーク信号グループが検出される場合がある。例えば、トラックの荷台などは凹凸があるので反射位置によってピーク信号に強弱が生じ、反射面の中心部以外で複数の極大値が形成される。すると、実際は単一の目標物体しか存在しないにも関わらず、複数の目標物体についての目標物体情報を誤検出するおそれがある。
【0009】
また、反射断面積が異なる複数の目標物体が近接して一時的に並走するようなときに、複数の目標物体から単一のピーク信号グループが検出される場合がある。例えば、大型車と小型のバイクとが互いに近接して一時的に並走するような場合には、両者の相対速度と相対距離は一時的に一致または近似する。このため、ピーク信号のビート周波数も一致または近似するので、大型車から得られるレベルが大きいピーク信号グループに小型バイクから得られるレベルが小さいピーク信号グループが埋もれてしまう。すると、小型のバイクが目標物体として検出されないおそれがある。
【0010】
このように、従来のレーダ装置は、単一の目標物体から複数のピーク信号グループが検出されることによる目標物体情報の誤検出や、複数の目標物体から単一のピーク信号グループが検出されることによる目標物体情報の検出もれという問題がある。
【0011】
そこで、本発明の目的は、個々のピーク信号グループが目標物体ごとに検出されたか否かを判断し、目標物体情報の誤検出や検出もれを回避できる、レーダ装置とその信号処理装置を提供することにある。
【課題を解決するための手段】
【0012】
本発明の第1の側面における信号処理装置は、周波数変調したレーダ信号を探索領域内の方位角ごとに送受信し、送受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置であって、前記方位角ごとに前記ビート信号の周波数スペクトルにおけるピーク信号を検出するピーク信号検出手段と、複数の方位角で周波数が一致または近似し、かつ極大値を形成するピーク信号グループを検出するグループ検出手段と、前記ピーク信号グループに基づき相対距離を含む目標物体情報を検出する目標物体情報検出手段とを有し、前記グループ検出手段は、前記探索領域の画像認識結果に基づき導出された単一の目標物体の方位角に複数のピーク信号グループの方位角が対応する場合には、当該複数のピーク信号グループを代表するピーク信号グループを検出することを特徴とする。
【0013】
本発明の第2の側面における信号処理装置は、周波数変調したレーダ信号を探索領域内の方位角ごとに送受信し、送受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置であって、前記方位角ごとに前記ビート信号の周波数スペクトルにおけるピーク信号を検出するピーク信号検出手段と、複数の方位角で周波数が一致または近似し、かつ極大値を形成するピーク信号グループを検出するグループ検出手段と、前記ピーク信号グループに基づき相対距離を含む目標物体情報を検出する目標物体情報検出手段とを有し、前記グループ検出手段は、前記探索領域の画像認識結果に基づき導出された複数の目標物体の方位角に単一のピーク信号グループの方位角が対応する場合には、当該ピーク信号グループを前記複数の目標物体の方位角にそれぞれ対応する複数のピーク信号グループに分離することを特徴とする。
【発明の効果】
【0014】
本発明によれば、個々のピーク信号グループが目標物体ごとに検出されたか否かを判断することにより、目標物体の誤検出や検出もれを回避できる。
【発明を実施するための最良の形態】
【0015】
以下、図面にしたがって本発明の実施の形態について説明する。但し、本発明の技術的範囲はこれらの実施の形態に限定されず、特許請求の範囲に記載された事項とその均等物まで及ぶものである。
【0016】
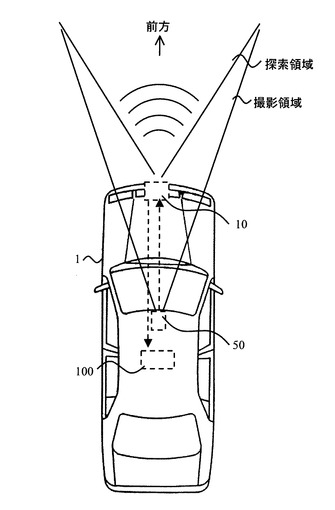
図1は、本実施形態におけるレーダ装置の使用状況を説明する図である。ここでは、周囲の状況に応じて車両1の走行を自動制御する、車両制御システムの構成例が示される。レーダ装置10は、かかるシステムにおいて画像認識装置50とともに車両1の周囲の状況を検出する手段として用いられる。
【0017】
レーダ装置10は、FM−CW方式とメカニカルスキャン方式とを組み合わせたレーダ装置である。レーダ装置10は、車両1の前部バンパー内部やフロントグリル内部に搭載され、周波数変調した電磁波をレーダ信号として送受信する。レーダ装置10は、アンテナを回動させることにより車両1前方の探索領域内の方位角ごとにレーダ信号を送信し、目標物体による反射信号を受信する。そしてレーダ装置10は、送受信信号からビート信号を生成してこれをマイクロコンピュータなどの信号処理装置により処理し、目標物体の相対距離、相対速度、及び方位角といった目標物体情報を検出する。ここで目標物体は、例えば車両1の先行車両、対向車両などである。
【0018】
画像認識装置50は、車両1前方の画像を撮影する画像センサ(画像収集装置)とこれによる撮影画像データを処理する画像認識部とを有する。画像認識装置50は、車両1のフロントガラス上部近傍の車室内に搭載され、画像センサの撮影領域がレーダ装置10の探索領域と重複し、かつ撮影領域と探索領域の中心が一致するように位置決めされる。そして、画像認識装置50は、フロントガラス越しに車両1前方の探索領域を画像センサにより撮影し、画像認識部により撮影画像内の目標物体を画像認識してその位置を検出する。
【0019】
本実施形態では、レーダ装置10は目標物体情報を検出する際に画像認識装置50による画像認識結果を用いて誤検出や検出もれを回避する。そして、レーダ装置10は検出した目標物体情報を車両制御装置100に出力する。
【0020】
車両制御装置100は、目標物体情報に基づいて車両1の各種アクチュエータを駆動することにより車両1の走行を自動制御する。例えば、先行車両を追尾して一定の車間距離で追従走行したり、相対速度や相対距離から先行車両や対向車との衝突が予測されるときには衝突を回避したり、あるいは、警報装置や乗員保護装置を作動させたりする。
【0021】
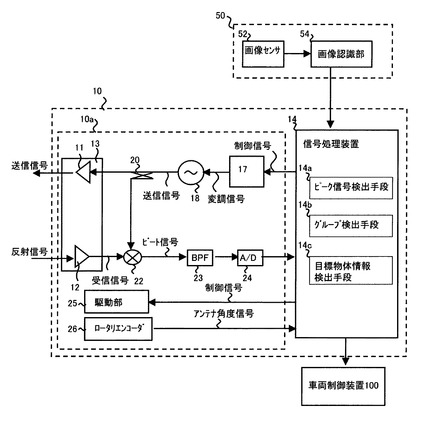
図2は、レーダ装置10を中心とする上記車両制御システムの概略構成を説明する図である。レーダ装置10は、上述したようにFM−CW方式とメカニカルスキャン方式とを組み合わせたレーダ装置であり、周波数変調したレーダ信号を探索領域内の方位角ごとに送受信し、送受信信号の周波数差を有するビート信号を生成するレーダ送受信機10aと、ビート信号を処理する信号処理装置14とを有する。
【0022】
レーダ送受信機10aは、送信用レーダ信号を生成する構成として、三角波状に電圧が変化する変調信号を生成する変調信号生成部17と、変調信号の電圧に対応した周波数のレーダ信号を発振するVCO(電圧制御発振器)18を有し、さらに送信用レーダ信号を送信するアンテナ素子11を備えたアンテナ13を有する。また、レーダ送受信機10aは、目標物体に反射された反射信号を受信するアンテナ素子12をアンテナ13に備え、さらにビート信号を生成する構成として、送信信号の一部を分配する分配器20と、分配された送信信号と受信信号を乗算して両者の周波数差を有するビート信号を生成するミキサ22と、ミキサ22から高周波ノイズや直流成分を除去する帯域通過フィルタ23とを有する。そして、レーダ送受信機10aが生成したビート信号はA/D変換器24によりデジタルデータに変換されて、信号処理装置14に入力される。なお、A/D変換器24は、信号処理装置14側に設けてもよい。
【0023】
また、レーダ送受信機10aは、探索領域内の方位角ごとにレーダ信号を送受信する手段として、モータとクランク機構とを備えアンテナ13を往復回動させる駆動部25を有し、さらにアンテナ13の回動角度(アンテナ角度)を検知するロータリエンコーダ26を有する。ロータリエンコーダ26が検知したアンテナ角度信号は、信号処理装置14に入力される。
【0024】
信号処理装置14は、一例として、ビート信号をFFT(高速フーリエ変換)処理して周波数スペクトルを検出するDSP(Digital Signal Processor)などのプロセッサと、マイクロコンピュータとを有する。そしてマイクロコンピュータは、入力されるデータを用いて各種演算処理を行うCPU(Central Processing Unit)と、CPUが実行する処理手順が記述されたプログラムを格納したROM(Read Only Memory)と、作業領域としてのRAM(Random Access Memory)とを有する。
【0025】
ここで、ピーク信号検出手段14a、グループ検出手段14b、及び目標物体情報検出手段14cは、後述するそれぞれの処理手順を記述した処理プログラムとこれに従って動作するマイクロコンピュータのCPUにより構成される。
【0026】
また、信号処理装置14は、後述するように、アンテナ13の回動角度とレーダ信号の周波数変調周期を同期させるための制御信号を、変調信号生成部17と駆動部25に出力する。また、信号処理装置14は、ロータリエンコーダ26からのアンテナ角度信号に基づいてアンテナ13の回動角度を検出することで、アンテナ13が指向する方位角を検出する。
【0027】
一方、画像認識装置50は、画像センサ52と、画像センサ52による撮影画像データを処理する画像認識部54とを有する。画像認識部54は、一例として、ASIC(Application Specific Integrated Circuit)で構成され、撮影画像を構成する画素の階調値を二値化し、二値化された画素の分布形状に基づき被写体の輪郭(エッジ)を検出する。画像認識部54は、予め目標物体のエッジ形状パターンを内蔵のROMに格納しており、撮影画像内における被写体のエッジ形状を照合して目標物体を検出する。そして、画像認識部54は、撮影画像内における目標物体のエッジ位置を検出し、これをレーダ装置10の信号処理装置14に画像認識結果として出力する。
【0028】
上記構成におけるレーダ送受信機10aの、探索領域内の方位角ごとにレーダ信号を送受信し、送受信信号の周波数差を有するビート信号を生成する動作について、図3、図4を用いて説明する。
【0029】
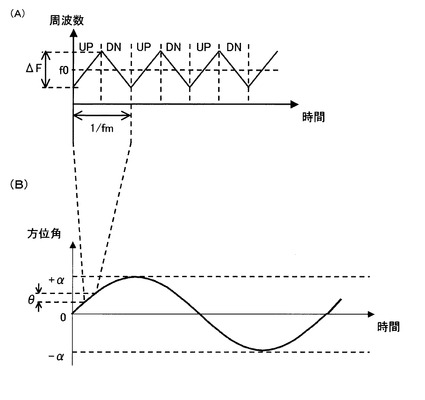
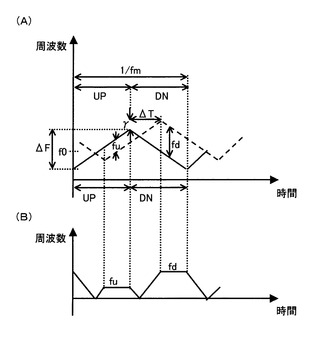
図3は、レーダ送受信機10aの送信動作について説明する図である。まず、図3(A)は、送信信号の周波数(縦軸)の時間(横軸)に対する変化を示す。変調信号生成部17が生成する変調信号は、直線的に電圧が上昇する上り変調区間と、直線的に電圧が下降する下り変調区間を有する三角波を形成する。よって、これに従ってVCO18が生成する送信信号の周波数は、図示するように、上り変調区間UPで上昇し、下り変調区間DNで下降する。以下では、送信信号の変調周期を1/fm(例えばfm=400Hz)、周波数偏移幅をΔF(例えばΔF=100MHz)、中心周波数f0(例えばf0=76.5GHz)とする。
【0030】
図3(B)は、アンテナ13の回動角度に対応する方位角(縦軸)の時間(横軸)に対する変化を示す。レーダ送受信機10aは、車両1の前方正面に対応する方向を0度として、探索領域に対応する角度範囲±α(例えば、±10度)でアンテナ13を往復回動させる。
【0031】
このとき、信号処理装置14が出力する制御信号に同期して変調信号生成部17、駆動部25が動作することにより、図3(A)、(B)に示すように、方位角θ(例えば1度)につき一対の上り変調区間UPと下り変調区間DNが対応するようにアンテナ13の回動速度と送信信号の周波数変調周期の同期がとられる。このような動作により、レーダ送受信機10aは、方位角θごとに周波数偏移幅をΔFで周波数が上昇及び下降するレーダ信号を送信し、その方位角に存在する目標物体から反射信号を受信する。すなわち、探索領域内をレーダ信号により走査する。
【0032】
図4は、送信信号と受信信号との対応関係を説明する図である。図4(A)は、各信号における周波数(縦軸)の時間(横軸)に対する変化を示す。実線で示す送信信号の周波数に対し、破線で示す受信信号の周波数は、目標物体の相対距離による遅延ΔTと、相対速度に応じたドップラ効果による周波数偏移γを受ける。その結果、送受信信号には、上り変調区間UPで周波数fu、下り変調区間DNで周波数fdの周波数差が生じる。
【0033】
図4(B)は、送受信信号を乗算することにより生成されるビート信号の周波数(縦軸)の時間(横軸)に対する変化を示す。以下では便宜上、上り変調区間におけるビート信号をアップビート信号、その周波数をアップビート周波数といい、下り変調区間におけるビート信号をダウンビート信号、その周波数をダウンビート周波数という。よって、アップビート信号はアップビート周波数fu、ダウンビート信号はダウンビート周波数fdを有する。
【0034】
このようにしてレーダ送受信機10aは、探索領域内の方位角θごとにレーダ信号を送受信し、上り変調区間と下り変調区間のそれぞれで送受信信号をミキシングして送受信信号の周波数差を有するアップ/ダウンビート信号を生成する。
【0035】
このようなアップ/ダウンビート信号は、A/D変換されて信号処理装置14に取り込まれる。そして、信号処理装置14は、アンテナ13の回動角度から送受信時にアンテナ13が指向する方位角θを検出し、方位角θごとにアップ/ダウンビート信号それぞれをFFT処理して周波数スペクトルを検出する。
【0036】
次に、ピーク信号検出手段14a、グループ検出手段14b、及び目標物体情報検出手段14cの動作について説明する。
【0037】
まず、ピーク信号検出手段14aは、方位角θごとにアップ/ダウンビート信号の周波数スペクトルにおけるピーク信号を検出する。
【0038】
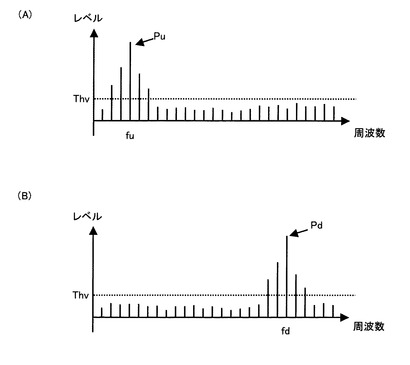
図5は、方位角θごとのピーク信号について説明する図である。図5(A)はアップビート信号の周波数スペクトル、図5(B)はダウンビート信号の周波数スペクトルの例を示す。
【0039】
ピーク信号検出手段14aは、このような方位角ごとのビート信号の周波数スペクトルにおいて、閾値Thv(ノイズ成分を除去するための閾値であって、任意に定める閾値)以上のレベルで極大値を形成するピーク信号を検出する。ここでは、説明の便宜のために1つのピークが検出される場合を示すと、図5(A)に示すように、アップビート信号では、アップビート周波数fuで極大値を形成するピーク信号Puが検出される。また、図5(B)に示すように、ダウンビート信号では、ダウンビート周波数fdで極大値を形成するピーク信号Pdが検出される。なお、以下では説明の便宜上、アップビート信号におけるピーク信号をアップピーク信号、ダウンビート信号におけるピーク信号をダウンピーク信号という。
【0040】
このような処理を方位角θごとに実行することにより、ある程度の反射断面積を有する目標物体からは、隣接する複数の方位角においてその目標物体の相対速度、相対距離を反映したアップ/ダウンビート周波数を有するアップ/ダウンピーク信号が検出される。
【0041】
そして、一般的に1つの目標物体はその反射断面の中心部で最大の反射断面積を有し、したがって中心部付近からの反射信号により生成されたピーク信号のレベルが最大となることから、グループ検出手段14bは、複数の方位角でアップ/ダウンビート周波数が一致または近似(同一目標物体とみなせる程度の誤差範囲であって、任意に設定できる誤差範囲内にあれば近似とみなす)し、かつ極大値を形成するピーク信号グループを検出する。
【0042】
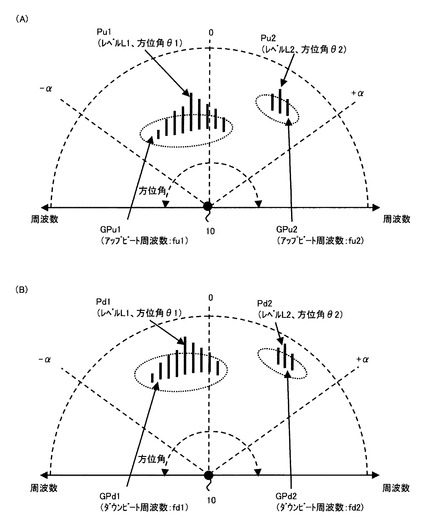
図6は、アップ/ダウンピーク信号グループについて説明する図である。図6(A)は、レーダ装置10を基準として、方位角−α〜+αの範囲におけるアップピーク信号の周波数分布を示す。また、図6(B)は、レーダ装置10を基準として、方位角−α〜+αの範囲におけるダウンピーク信号の周波数分布を示す。
【0043】
ここでは、アップ/ダウンピーク信号のそれぞれで2つのアップ/ダウンピーク信号グループが検出される場合を示す。また、アップ/ダウンピーク信号を示す棒線の長さは、各ピーク信号のレベルの大きさに対応する。グループ検出手段14bは、図6(A)に示すように、アップピーク信号からは、隣接する複数の方位角においてアップピーク信号Pu1で極大値を形成するアップビート周波数fu1のアップピーク信号グループGPu1と、アップピーク信号Pu2で極大値を形成するアップビート周波数fu2のアップピーク信号グループGPu2を検出する。また、図6(B)に示すように、ダウンピーク信号からは、隣接する複数の方位角においてダウンピーク信号Pd1で極大値を形成するダウンビート周波数fd1のダウンピーク信号グループGPd1と、ダウンピーク信号Pd2で極大値を形成するダウンビート周波数fd2のダウンピーク信号グループGPd2を検出する。なお、極大値は、グループ内のアップ/ダウンピーク信号の最大値を求めてもよいし、グループ内のアップ/ダウンピーク信号のレベルを曲線近似することにより求めてもよい。かかるアップ/ダウンピーク信号グループを検出する処理を、グルーピング処理という。
【0044】
そして、目標物体情報検出手段14cは、アップ/ダウンピーク信号グループに基づき、目標物体の相対距離もしくは相対速度、及び方位角を含む目標物体情報を検出する。具体的な方法としては、目標物体情報検出手段14cは、まず各アップ/ダウンピーク信号グループで極大値を形成するアップ/ダウンピーク信号にそれぞれのアップ/ダウンピーク信号グループを代表させ、代表のアップ/ダウンピーク信号のレベルまたは方位角が一致または近似するアップ/ダウンピーク信号グループを対応付けする、ペアリング処理を行う。このとき代表のアップ/ダウンピーク信号のレベルまたは方位角が、同一目標物体とみなせる程度の誤差範囲であって、任意に設定できる誤差範囲内にあれば近似とみなす。よって上記の例では、アップピーク信号グループGPu1を代表するアップピーク信号Pu1のレベルL1または方位角θ1と、ダウンピーク信号グループGPd1を代表するダウンピーク信号Pd1のレベルL1または方位角θ1がそれぞれ一致するので、アップピーク信号グループGPu1とダウンピーク信号グループGPd1とがペアリングされる。また、アップピーク信号グループGPu2を代表するアップピーク信号Pu2のレベルL2または方位角θ2と、ダウンピーク信号グループGPd2を代表するダウンピーク信号Pd2のレベルL2または方位角θ2がそれぞれ一致するので、アップピーク信号グループGPu2とダウンピーク信号グループGPd2とがペアリングされる。
【0045】
ここにおいて、同一目標物体から得られた蓋然性の高いアップピーク信号グループのアップビート周波数と、ダウンピーク信号グループのダウンビート周波数とが対応づけされる。すなわち、アップピーク信号グループGPu1とダウンピーク信号グループGPd1のペアではアップビート周波数fu1とダウンビート周波数fd1が対応づけされ、アップピーク信号グループGPu2とダウンピーク信号グループGPd2のペアではアップビート周波数fu2とダウンビート周波数fd2が対応づけされる。
【0046】
そして、目標物体情報検出手段14cは、次式に従って、各ペアごとに目標物体の相対速度、相対距離を算出する。ここで、fuはアップビート周波数、fdはダウンビート周波数、Cは光速、fmは三角波の周波数、f0は送信信号の中心周波数、ΔFは周波数偏移幅を示す。
【0047】
相対距離:R=C・(fu1+fd1)/(8・ΔF・fm) …式(1)
相対速度:V=C・(fd1−fu1)/(4・f0) …式(2)
また、目標物体情報検出手段14cは、ペアリングにより対応づけしたアップ/ダウンピーク信号グループそれぞれを代表するアップ/ダウンピーク信号の方位角の平均、あるいは、アップ/ダウンピーク信号グループの中心の方位角が目標物体の方位角として検出する。
【0048】
上記のような処理を実行することにより、目標物体の相対速度、相対距離、及び方位角といった目標物体情報が検出される。
【0049】
ここで、上述した処理動作を含む信号処理装置14によるメインの動作手順を説明する。
【0050】
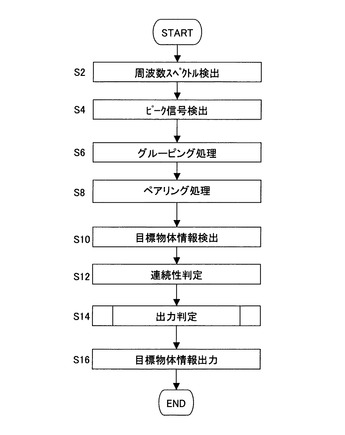
図7は、本実施形態における信号処理装置14の動作手順を説明するフローチャート図である。図7の手順は、レーダ送受信機10aが探索領域内をレーダ信号により1回走査するごとに実行される。ピーク信号検出手段14aは、探索領域内の方位角θごとにアップ/ダウンビート信号それぞれをFFT処理して周波数スペクトルを検出する(S2)。そして、周波数スペクトルにおけるピーク信号を検出する(S4)。
【0051】
次に、グループ検出手段14bは、方位角方向におけるアップ/ダウンピーク信号から、周波数が一致または近似し、かつ極大値を形成するアップ/ダウンピーク信号グループを検出するグルーピング処理を行う(S6)。
【0052】
次に、目標物体情報検出手段14cは、アップ/ダウンピーク信号グループのそれぞれで、各グループを代表するアップ/ダウンピーク信号を基準にして、アップ/ダウンピーク信号グループ同士を対応付けするペアリング処理を行う(S8)。そして、ペアリングされたアップ/ダウンピーク信号グループごとに、目標物体情報を検出する(S10)。
【0053】
そして、目標物体検出手段14cは、過去に検出された目標物体情報の履歴との連続性の有無を判定し(S12)、車両制御上の優先順、たとえば相対速度、相対距離から算出される衝突予測時間が短い順に目標物体情報をソートする出力判定を実行する(S14)。そして、優先順に目標物体情報を車両制御装置100に向けて出力する(S16)。
【0054】
ところで、上記のグルーピング処理(手順S6)では、目標物体の反射断面積の形状によっては、単一の目標物体から複数のピーク信号グループが検出される場合がある。例えば、トラックの荷台などは凹凸があるので反射位置によってピーク信号に強弱が生じ、反射面の中心部以外で複数の極大値が形成される場合である。この場合、実在しない目標物体について目標物体情報を誤検出するおそれがある。
【0055】
また、複数の目標物体から単一のアップ/ダウンピーク信号グループしか検出されない場合がある。例えば、大型車と小型のバイクとが互いに近接して一時的に並走するような場合には、両者の相対速度と相対距離は一時的に一致または近似する。このため、ピーク信号のビート周波数も一致または近似するので、大型車から得られるレベルが大きいピーク信号グループに小型バイクから得られるレベルが小さいピーク信号グループが埋もれてしまう場合である。この場合、実在する目標物体について目標物体情報の検出もれのおそれがある。
【0056】
この点、画像認識装置50によれば、撮影画像中エッジに囲まれた領域として目標物体を認識するので、例えば分解能が低い画像センサを用いたり、単眼の画像認識装置を用いたりした場合であっても、単一の目標物体を複数の異なる目標物体として認識したり、複数の異なる目標物体を単一の目標物体として認識したりする可能性はレーダ装置より低い。
【0057】
本実施形態ではかかる画像認識の特徴を利用して、個々のアップ/ダウンピーク信号グループが目標物体ごとに検出されたか否かを判断する。すなわち、グループ検出手段14bは、画像認識装置50による探索領域の画像認識結果に基づき導出した目標物体の方位角に複数のアップ/ダウンピーク信号グループの方位角が対応する場合には、当該複数のアップ/ダウンピーク信号グループを代表するアップ/ダウンピーク信号グループを検出する。そして、目標物体情報検出手段14cは、複数のアップ/ダウンピーク信号グループを代表するアップ/ダウンピーク信号グループに基づいて目標物体情報を検出する。よって、単一の目標物体から複数のアップ/ダウンピーク信号グループが検出された場合に、実在しない目標物体についての目標物体情報を誤検出することを回避できる。
【0058】
また、グループ検出手段14bは、画像認識装置50による探索領域の画像認識結果に基づき導出した複数の目標物体の方位角に単一のアップ/ダウンピーク信号グループの方位角が対応する場合には、当該アップ/ダウンピーク信号グループを前記複数の目標物体の方位角にそれぞれ対応する複数のアップ/ダウンピーク信号グループに分離する。そして、目標物体情報検出手段14cは、分離されたアップ/ダウンピーク信号グループごとに目標物体情報を検出する。よって、レベルの小さいアップ/ダウンピーク信号グループがレベルの大きいアップ/ダウンピーク信号グループに埋もれる場合に、実在する目標物体についての目標物体情報の検出もれを回避できる。
【0059】
ここで、グループ手段14bの具体的な動作の説明に先立ち、画像認識装置50による画像認識結果と目標物体の方位角との対応関係について、図8を用いて説明する。
【0060】
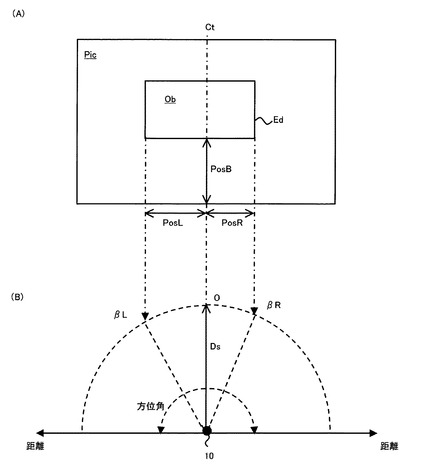
図8(A)は、画像センサ52による撮影画像を模式的に示す。ここでは、説明の便宜上、1つの目標物体が撮影された場合を例とする。画像認識装置50は、図示するような探索領域の撮影画像Pic内に含まれる目標物体画像ObのエッジEdを検出すると、エッジEdの下端部、及び左右端部の撮影画像Pic内での位置を検出する。ここでは、エッジEdの下端部の位置は撮影画像Pic下端部からの距離PosB、エッジEdの左右端部の位置は、撮影画像Picの中心Ctからの距離PosL、PosRとする。このようにして検出されたエッジ位置は、画像認識結果としてレーダ装置10の信号処理装置14に入力される。
【0061】
次に、レーダ装置10を基準とする探索領域の平面図を図8(B)に示すと、画像センサ52とレーダ装置10の位置関係は固定されており、撮影画像Picの中心Ctは方位角0度に一致しているので、平地で撮影された場合における目標物体画像ObのエッジEd下端の撮影画像Pic内での位置は、レーダ装置10から方位角0度方向の相対距離に概ね対応している。よって、上記のエッジEd下端の撮影画像Pic内での位置PosBに対応するレーダ装置10から方位角0度方向の相対距離を距離Dsとすると、目標物体画像ObのエッジEd左右端の撮影画像Pic内での位置PosL、PosRに対応する方位角βL、βRが、距離Dsに対応して求められる。
【0062】
このことを利用し、グループ検出手段14bは、画像認識装置50から入力されるエッジ位置に対応する目標物体の左右端部の方位角角βL、βRを算出する。あるいは、画像認識部54がエッジ位置に対応する目標物体の左右端部の方位角角βL、βRを算出し、グループ検出手段14bは算出結果を取得してもよい。ここにおいて、目標物体の左右端部の方位角角βL、βRが、「画像認識結果に基づき導出された目標物体の方位角」に対応する。そして、グループ検出手段14bは、方位角角βL、βRに基づいて、アップ/ダウンピーク信号グループが目標物体ごとに検出されたか否かを判断する。
【0063】
なお、以下でのグループ検出手段14bの動作の説明は、アップ/ダウンピーク信号グループのそれぞれに対して適用される。このため説明の便宜上、アップピーク信号グループ、ダウンピーク信号グループを区別せず、単にピーク信号グループとして説明する。
【0064】
[第1の実施例]
第1の実施例では、グループ検出手段14bは、複数のピーク信号グループが同一の目標物体から検出されたか否かを判断する。
【0065】
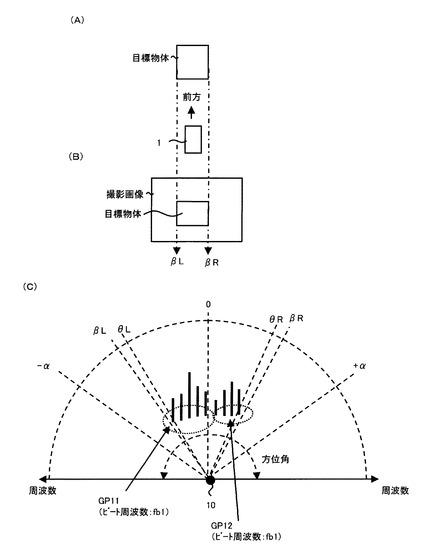
図9は、かかる判断の方法を説明する図である。図9(A)は、第1の実施例における車両1の周囲の状況を示す平面図である。車両1の前方を目標物体(例えば大型トラック)が走行している。図9(B)は、図9(A)の状況で得られる撮影画像と、画像認識結果に基づく目標物体の方位角βL、βRの対応を示す。図9(C)は、レーダ装置10を基準として、方位角−α〜+αの範囲におけるピーク信号(棒線の長さはピーク信号のレベルを示す)の周波数分布を示す。ここでは、ビート周波数fb1を有するピーク信号グループGP11、GP12が検出された場合が示される。
【0066】
ここで、図9(C)に、画像認識結果に基づき導出した目標物体の左右端部の方位角βL、βRを示す。すると、図示するように、ピーク信号グループGP11における左端の方位角θLは方位角βLより大きく、かつピーク信号グループGP12における右端の方位角θRは方位角βRより小さいので、ピーク信号グループGP11、GP12は方位角βL〜βRの範囲内に含まれる。よってこの場合、グループ検出手段14bは、ピーク信号グループGP11、GP12は同一の目標物体から得られたものと判断する。なおここにおいて、ピーク信号グループGP11における左端の方位角θL、ピーク信号グループGP12における右端の方位角θRがそれぞれ「ピーク信号グループの方位角」に対応する。
【0067】
上記のように判断した場合、グループ検出手段14bは、ピーク信号グループGP11、GP12を代表する代表ピーク信号グループを検出する。例えば、ピーク信号グループGP11、GP12のうち例えばピーク信号グループGP11の方が極大値のレベルが大きいとすると、ピーク信号グループGP11を代表のピーク信号グループとして検出する。それとともに、ピーク信号グループGP12を除外する。
【0068】
そして、目標物体情報検出手段14cは、代表のピーク信号グループGP11に対するペアリング処理を行うことにより、目標物体情報を検出する。そうすることにより、実在しない目標物体についての目標物体情報を誤検出することを回避できる。
【0069】
なお、ピーク信号グループGP11、GP12を代表する代表ピーク信号グループを検出する際に、ピーク信号グループGP11、GP12のビート周波数が多少異なる場合(つまり、ビート周波数が近似する場合)には、低いビート周波数を有するピーク信号グループを代表のピーク信号グループとして検出してもよい。上述した式(1)に示すように、アップ/ダウンビート周波数が低いほど検出される相対距離が小さくなるので、より近距離にあって車両制御上重要度の高い目標物体の目標物体情報を確実に検出できる。
【0070】
図10は、第1の実施例における目標物体情報検出手段14cの動作手順を説明するフローチャート図である。図9を参照しつつ、目標物体情報検出手段14cの動作手順を説明する。
【0071】
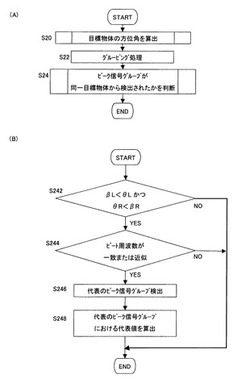
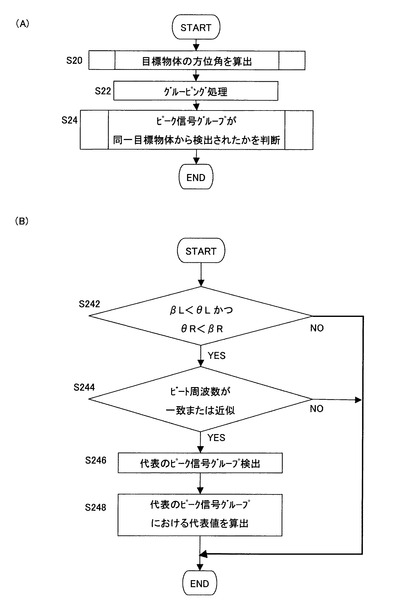
図10(A)の手順は、図7に示した手順S6を代替する手順である。グループ検出手段14bは、画像認識装置50から取得した画像認識結果に基づいて、目標物体の方位角を算出する(S20)。あるいは、グループ検出手段14bは、画像認識装置50が画像認識結果に基づいて算出した目標物体の方位角を画像認識装置50から取得してもよい。そして、手順S8と同様のグルーピング処理を実行する(S22)。そして、複数のピーク信号グループGP11、GP12が同一の目標物体から検出されたか否かを判断する処理を実行する(S24)。なお、手順S24は、アップピーク信号グループ、ダウンピーク信号グループそれぞれについて実行される。
【0072】
図10(B)は、図10(A)の手順S24のサブルーチンに対応する手順である。グループ検出手段14bは、ピーク信号グループGP11における左端の方位角θLが方位角βLより大きく、かつGP12における右端の方位角θRが方位角βRより小さいかを判断する。すなわち、アップピーク信号グループGP11、GP12が方位角βL〜βRの範囲内に含まれるか否かを判断する(S242)。結果がYESの場合には、ピーク信号グループGP11、GP12のビート周波数が一致または近似するかを判断する(S244)。ここで、ピーク信号グループGP11、GP12のビート周波数が、同一目標物体として判断可能な誤差範囲内であって任意に設定される誤差範囲内にあれば近似と判断する。図9の例では、ピーク信号グループGP11、GP12のビート周波数はfb1で一致しているので判断結果は「YES」であるから、ピーク信号グループGP11、GP12の代表ピーク信号グループGP11を検出する(S246)。そして、ペアリング処理を実行する際の代表値として、代表アップピーク信号グループGP11におけるレベルが最大のアップピーク信号のレベルまたは方位角を算出する(S248)。
【0073】
複数のピーク信号グループが同一の目標物体から検出された場合であっても上記のような手順を実行することにより、代表のピーク信号グループに基づくペアリング処理(図7の手順S8)が実行される。よって、実在しない目標物体についての目標物体情報を誤検出することを回避できる。
【0074】
[第2の実施例]
第2の実施例では、グループ検出手段14bが、単一のピーク信号グループが複数の目標物体から検出されたか否かを判断する。
【0075】
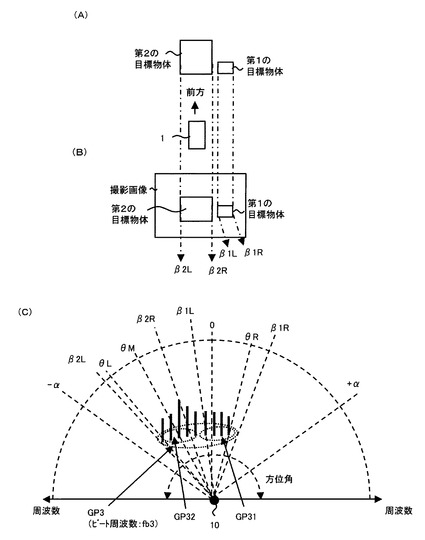
図11は、かかる判断の方法を説明する図である。図11(A)は、第2の実施例における車両1の周囲の状況を示す平面図である。車両1の前方を第1の目標物体(例えば小型バイク)と第2の目標物体(例えば大型トラック)が並走している。図11(B)は、図11(A)の状況で得られる撮影画像と、画像認識結果に基づく第1の目標物体の方位角β1L、β1R、及び第2の目標物体の方位角β2L、β2の対応を示す。そして、図11(C)は、レーダ装置10を基準として、方位角−α〜+αの範囲におけるピーク信号(棒線の長さはピーク信号のレベルを示す)の周波数分布を示す。ここでは、ビート周波数fb3を有するピーク信号グループGP3が検出された場合が示される。
【0076】
ここで、図11(C)に、第1の目標物体の左右端部に対応する方位角β1L、β1Rと、第2の目標物体の左右端部に対応する方位角β2L、β2Rとを示す。この場合、まず第1の目標物体の左右端部に対応する方位角β1L、β1Rとピーク信号グループGP3における左右端の方位角θL、θR、及び極大値の方位角θMの関係を見てみる。ここにおいて、方位角θL、θR、及びθMが、ピーク信号グループGP3の方位角に対応する。すると、ピーク信号グループGP3における左端の方位角θLは方位角β1Lより小さく、かつピーク信号グループGP3における右端の方位角θRは方位角β1Lより大きい。さらに、ピーク信号グループGP3における極大値の方位角θMは、方位角β1Lより小さい。よってまず、グループ検出手段14bは、ピーク信号グループGP3のうち、第1の目標物体に対応する方位角β1L〜β1Rに対応する部分をピーク信号グループGP31として分離する。
【0077】
次に、第2の目標物体の左右端部に対応する方位角β2L、β2Rとピーク信号グループGP3における左右端の方位角θL、θR、及び極大値の方位角θMの関係を見てみると、ピーク信号グループGP3における左端の方位角θLは方位角β2Rより小さく、かつピーク信号グループGP3における右端の方位角θRは方位角β2Rより大きい。さらに、ピーク信号グループGP3における極大値の方位角θMは、方位角β2Rより小さい。よってこの場合、ピーク信号グループGP3における極大値は、第2の目標物体に対応する方位角β2L〜β2Rの範囲で形成されるので、グループ検出手段14bは、ピーク信号グループGP3からピーク信号グループGP31を分離した残りの部分から、方位角β2L〜β2Rに対応する部分をピーク信号グループGP32として検出する。この場合、ピーク信号グループGP32はピーク信号グループGP31より反射断面積が大きい目標物体を示す蓋然性が大きい。
【0078】
そして、目標物体情報検出手段14cは、分離したピーク信号グループについて上述したペアリング処理を実行することにより、目標物体情報を検出する。このようにして、小型の目標物体についての目標物体情報の検出もれを回避できる。
【0079】
図12は、第2の実施例におけるグループ検出手段14bの動作手順を説明するフローチャート図である。図11を参照しつつ、グループ検出手段14bの動作手順を説明する。
【0080】
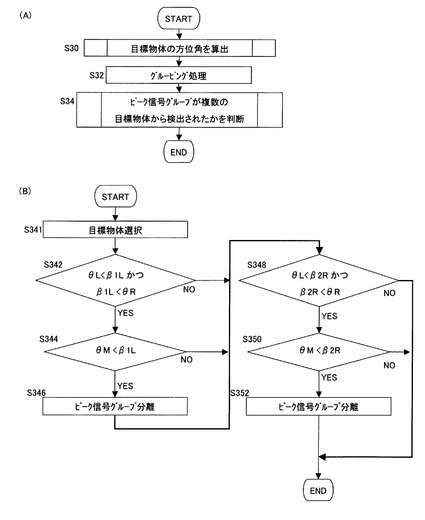
図12(A)の手順は、図7に示した手順S6を代替する手順である。グループ検出手段14bは、画像認識装置50から取得した画像認識結果に基づいて、目標物体の方位角を算出する(S30)。あるいは、グループ検出手段14bは、画像認識装置50が画像認識結果に基づいて算出した目標物体の方位角を画像認識装置50から取得してもよい。そして、手順S8と同様のグルーピング処理を実行する(S32)。そして、アップピーク信号グループ、ダウンピーク信号グループごとに、ピーク信号グループGP3が複数の目標物体から検出されたか否かを判断する処理を実行する(S34)。
【0081】
図12(B)は、図12(A)の手順S34のサブルーチンに対応する手順である。グループ検出手段14bは、まず複数の目標物体の方位角を算出した場合に、どの目標物体の方位角を用いるかを選択する(S341)。選択方法としては、画像認識装置50からの画像認識結果に基づき検出した目標物体の相対距離の順にソートした結果と、ピーク信号グループのビート周波数の順にソートした結果とを対応づけることが可能である。上述した式(1)によれば、ビート周波数と目標物体の相対距離は比例するので、かかる方法によれば、画像認識された目標物体に対応する蓋然性が大きいピーク信号グループを選択することができる。
【0082】
あるいは、過去の検出履歴とビート周波数から各ピーク信号グループに対応する相対距離を予測し、この相対距離と画像認識装置50により検出された目標物体の距離とが一致または近似する場合に(同一目標物体と判断可能な誤差範囲であって任意に設定可能な誤差範囲内にあれば近似と判断する)、両者を対応づけてもよい。
【0083】
そして、グループ検出手段14bは、方位角β1L〜β1Rに位置する第1の目標物体について、ピーク信号グループGP3における左端の方位角θLが方位角β1Lより小さく、かつGP3における右端の方位角θRが方位角β1Lより大きいかを判断する(S342)。そして、「YES」の場合、ピーク信号グループGP3における極大値の方位角θMが方位角β1Lより小さいかを判断する(S344)。そして、「YES」の場合、ピーク信号グループGP3のうち方位角β1L〜β1Rに対応するピーク信号を、ピーク信号グループGP31として分離する(S346)。
【0084】
次に、グループ検出手段14bは、方位角β2L〜β2Rに位置する第2の目標物体について、ピーク信号グループGP3における左端の方位角θLが方位角β2Rより小さく、かつGP3における右端の方位角θRが方位角β2Rより大きいかを判断する(S348)。そして、「YES」の場合、ピーク信号グループGP3における極大値の方位角θMが方位角β2Rより小さいかを判断する(S350)。そして、「YES」の場合、ピーク信号グループGP3のうち方位角β2L〜β2Rに対応するピーク信号を、ピーク信号グループGP32として分離する(S352)。
【0085】
ピーク信号グループが複数の目標物体から検出された場合であっても、上記のような手順を実行することにより、分離されたピーク信号グループに基づくペアリング処理(図7の手順S8)が実行される。よって、目標物体情報の検出もれを回避できる。
【0086】
なお、上述した第2の実施例の手順の後に、第1の実施例の手順を実行することも可能である。例えば、大型のトラックと小型のバイクなどが近接しており、大型のトラックからは複数のピーク信号グループが検出され、そのうちの1つが小型バイクからのピーク信号グループを含むような場合に、まず、小型バイクからのピーク信号グループを分離することにより小型バイクを確実に検出し、さらに、小型バイクから分離されたピーク信号グループと大型トラックから得られたピーク信号グループを代表するピーク信号グループを検出することにより、実在しない目標物体の誤検出を防止できる。
【0087】
[第3の実施例]
図8(B)で示したように、グループ検出手段14bは、画像認識装置50から取得した目標物体画像のエッジ位置に基づきその方位角を算出する際に、まずエッジ下端部から目標物体までの相対距離を算出して、これを方位角算出のパラメータとして用いる。このとき、画像センサ52の画素数が少ないと、画像認識装置50が検出したエッジ位置の検出精度が低い場合がある。すると、エッジ位置から求められる距離に誤差が生じ、その結果として方位角に誤差が生じるおそれがある。
【0088】
第3の実施例では、グループ検出手段14bは、画像認識装置50から取得したエッジ位置に基づき算出する相対距離と、過去に目標物体情報検出手段14cが検出した相対距離とが一定の誤差範囲(例えば数十センチ〜1メートル程度)内で一致する場合に、エッジ位置から算出した距離を過去に検出した相対距離により置換して、方位角を算出する。そうすることにより、方位角の誤差を防止する。
【0089】
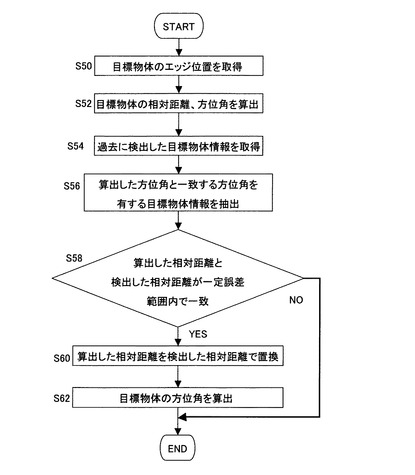
図13は、第3の実施例におけるグループ検出手段14bの動作手順を説明するフローチャート図である。図13の手順は、図10(A)の手順S20、または図12(A)の手順S30のサブルーチンに対応する。
【0090】
まず、グループ検出手段14bは、画像認識装置50から目標物体のエッジ位置を取得する(S50)。そして、エッジ位置下端部に基づいて目標物体までの相対距離を算出するとともに、その相対距離を用いて目標物体の方位角を算出する(S52)。そして、過去に目標物体情報検出手段14cが検出して信号処理装置14のRAMに格納した目標物体情報を取得する(S54)。
【0091】
そして、手順S52で算出した方位角と一定の誤差範囲(例えば、車両の横幅に対応する方位角範囲)で一致する方位角を有する目標物体情報を抽出する(S56)。
【0092】
そして、手順S52で算出した目標物体の相対距離と、手順S56で抽出した目標物体情報に含まれる相対距離が一定の誤差範囲(例えば、数十センチ〜数メートル)にある場合には(S58のYES)、同一の目標物体である蓋然性が高いので、手順S52で算出した相対距離を手順S56で抽出した過去の相対距離で置換する(S60)。そして、置換した相対距離に基づき目標物体の方位角を算出する(S62)。
【0093】
このような手順によれば、エッジ位置から算出した距離に基づき画像認識された目標物体の方位角を算出する際の誤差を防止できる。よって、精度の低い画像認識装置を用いた場合であっても、個々のピーク信号グループが目標物体ごとに検出されたか否かを判断する処理をより精度よく実行できる。
【0094】
[第4の実施例]
第4の実施例では、目標物体情報検出手段14cは、図7で示したメイン手順における出力判定(手順S14)を行う際、画像認識結果を用いることにより判定の精度を向上させることができる。
【0095】
具体的な状況として、レーダ送受信機10aによる受信信号のレベルがミキサ22、帯域通過フィルタ23、A/D変換器24などの飽和レベルに達すると、信号処理装置14がビート信号をFFT処理する際に高調波が検出される場合がある。かかる高調波に基づくピーク信号を検出し、さらにこのようなピーク信号グループに基づく処理を行うと、実在しない目標物体、つまり虚像を誤検出するおそれがある。
【0096】
あるいは、レーダ装置10をメカニカルスキャン方式ではなく、複数の受信アンテナにおける受信位相差に基づき目標物体の方位角を検出する位相モノパルス方式のレーダ装置として構成した場合において、受信アンテナ間の距離が受信信号の波長を超えるようなときには虚像が検出されることがある。
【0097】
かかる場合に、画像認識結果を用いることで、上記のような虚像を判別することができる。その場合、かかる虚像の目標物体情報について車両制御装置100への出力優先度を低下させて、虚像に基づく車両1の誤制御の可能性を低下させることができる。
【0098】
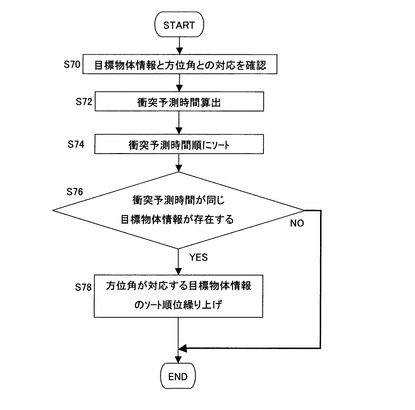
図14は、第4の実施例における目標物体情報検出手段14cの動作手順を説明するフローチャート図である。図14の手順は、図7の手順S14における1つのサブルーチンに対応する。
【0099】
目標物体情報検出手段14cは、図7の手順S12で連続性が確認された目標物体情報を対象に、画像認識装置50から取得した画像認識結果に基づき算出した方位角が対応するかを確認する(S70)。そして、目標物体情報の相対速度、相対距離から、衝突予測時間を計算する(S72)。そして、目標物体情報を、衝突予測時間が小さい順にソートする(S74)。ここにおいて、衝突予測時間が短いほど車両制御上重要な目標物体であるので、車両制御上の優先順に目標物体情報がソートされる。
【0100】
そして、目標物体方法検出手段14cは、衝突予測時間が同じ目標物体情報が存在する場合に(S76のYES)、手順S70で方位角が対応づけられた目標物体情報の優先順位を繰り上げる(S78)。
【0101】
このような手順によれば、車両制御上重要度の高い目標物体情報から順に車両制御装置100に出力する際に、車両制御装置100側の処理能力の限界に応じて目標物体情報の数に上限を設けることで、虚像に基づく目標物体情報を出力する可能性を低下させることができる。
【0102】
よって、車両1の誤制御の可能性を低下させることができる。
【0103】
[第5の実施例]
目標物体としての他車両が路側のガードレールの付近や、路面上方の高架などの下を通過するときには、一時的に目標物体の相対距離とガードレールや高架などの設置物の相対距離が近似する。そのようなときには、他車両などの目標物体から得られたアップピーク信号グループまたはダウンピーク信号グループのいずれかが、路側のガードレールや、路面上方の高架などの設置物からのピーク信号とビート周波数が近似することにより、これらに埋もれてしまうことがある。かかる場合には、車両の制御上必要な他車両についての目標物体情報が検出されないおそれがある。第5の実施例では、画像認識結果を用いてかかる事態を回避する。
【0104】
画像認識装置50は、画像認識部54内のメモリにガードレールや高架などのエッジ形状パターンを予め格納しておくことで、これらを画像認識することができる。あるいは、レーダ装置10側の信号処理装置14内のメモリにガードレールや高架などのエッジ形状パターンを予め格納しておき、グループ検出手段14bが設置物であることを判断してもよい。
【0105】
そして、かかる画像認識結果が得られたときには、グループ検出手段14bは、設置物からのピーク信号に埋もれたピーク信号グループの方位角を推定する処理を行う。具体的には、アップピーク信号とダウンピーク信号とではアップビート周波数とダウンビート周波数が異なるので、いずれかのピーク信号グループが埋もれた場合であっても、他方のピーク信号グループが検出される場合がある。かかる場合に、埋もれていないピーク信号グループの方位角から埋もれたピーク信号グループの方位角を推定する。さらに、埋もれていないピーク信号グループのビート周波数と、過去に検出された相対速度、相対距離とから、上述の式(1)、(2)を用いて、埋もれたピーク信号グループのビート周波数を推定する。
【0106】
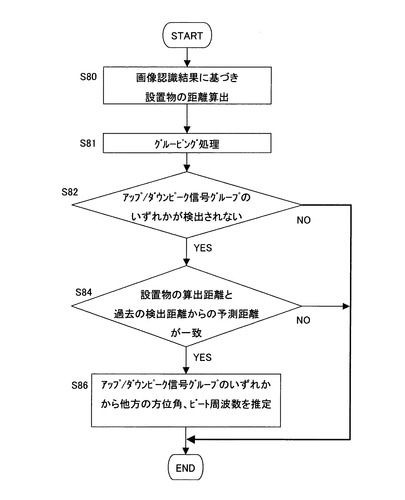
図15は、第5の実施例におけるグループ検出手段14bの動作手順を説明するフローチャート図である。図15の手順は、図7に示した手順S6を代替する手順である。
【0107】
まず、グループ検出手段14bは、画像認識結果に基づき設置物の距離を算出する(S80)。この場合、ガードレールや高架などの設置物は、そのエッジ形状が撮影画像内で占める面積から距離を算出することができる。そして、グループ検出手段14bは、図7の手順S6に示したグルーピング処理を実行する(S81)。
【0108】
次に、グループ検出手段14bは、アップ/ダウンピーク信号グループのいずれかが検出されていないかを判断する(S82)。たとえば、ピーク信号グループの数が一致しなければ、「YES」と判断する。その場合に、画像認識結果に基づく設置物の距離と、過去に検出された目標物体の相対距離から予測される相対距離とが一致するかを確認する(S84)。結果が「YES」の場合には、目標物体のピーク信号グループが設置物のピーク信号に埋もれていると判断し、埋もれていないピーク信号グループから埋もれているピーク信号グループの方位角、ビート周波数を推定する(S86)。
【0109】
このような手順によれば、推定されたピーク信号グループを用いてペアリング処理を実行することができるので、目標物体の検出もれを防止できる。
【0110】
[第6の実施例]
上述した第1の実施例では、反射断面積が方位角方向に広い目標物体、たとえば、大型の荷台を備えたトラックなどから複数のピーク信号グループが検出される場合に、単一の代表ピーク信号グループを検出する手順を示した。大型のトラックなどでは、このような場合のほかに、車両後方の荷台と、車両前方の運転席などからの反射信号が得られ、それぞれがピーク信号グループを形成する場合がある。かかる場合に、大型車だと車両長が数メートル以上に及ぶため、反射点までの相対距離に差が生じ、したがって複数のピーク信号グループのビート周波数に差が生じる。このため、ビート周波数が一致または近似する複数のピーク信号グループを対象とする第1の実施例では処理することができない。
【0111】
そこで第6の実施例では、目標物体情報検出手段14cは、図7で示したメイン手順における出力判定(手順S14)を行う際、画像認識結果から車両長を推定し、車両長に基づく相対距離差を有する複数の目標物体情報があるときには、複数の目標物体情報を出力する代わりにより相対距離が近い方を出力する。そうすることにより、車両制御上重要度の高い目標物体情報を出力することができ、車両制御上の誤動作を防止できる。
【0112】
図16は、第6の実施例における目標物体情報検出手段14cの動作手順を説明するフローチャート図である。図16の手順は、図7の手順S14における1つのサブルーチンに対応する。
【0113】
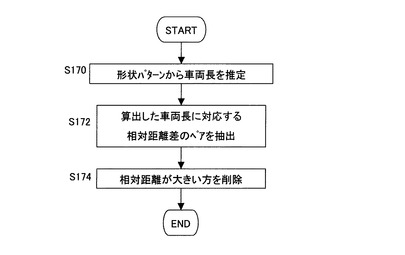
目標物体情報検出手段14cは、まず、画像認識装置50から取得した形状パターンから、車両長を推定する(S170)。この場合、形状パターンと車両長とを対応づけたマップデータをマイクロコンピュータのROMに格納しておき、これを参照する。例えば、乗用車の形状パターンの場合には車両長を5メートル、大型トラックの形状パターンの場合には、車両長を8メートルとして推定する。
【0114】
そして、図7の手順S12で連続性が確認された目標物体情報から、算出した車両長に対応する相対距離差を有する目標物体情報のペアを抽出する(S172)。そして、抽出したペアのうち、相対距離が大きい方を削除する(S174)。
【0115】
このような手順によれば、車両制御上重要度の高い目標物体情報を出力することができ、車両制御上の誤動作を防止できる。
【0116】
上述において、アップ/ダウンピーク信号の別を特定せずに、個々のピーク信号グループが目標物体ごとに検出されたか否かを判断する方法を説明した。かかる判断処理をアップ/ダウンピーク信号の両方において行う場合に、アップ/ダウンピーク信号グループの両方で同じ判断結果、つまり、複数のピーク信号グループが単一の目標物体に対応していたり、単一のピーク信号グループが複数の目標物体に対応していたりという判断結果が得られるときには、アップ/ダウンピーク信号グループの両方で上述した処理を行うことで、目標物体情報の誤検出や検出もれを回避できる。また、アップ/ダウンピーク信号グループのいずれかのみで複数のピーク信号グループが単一の目標物体に対応していたり、単一のピーク信号グループが複数の目標物体に対応していたりという判断結果が得られるときには、そのピーク信号グループに対し上述した処理を行うことにより、正確なペアリング処理が可能となる。よって、目標物体情報の誤検出や検出もれを回避できる。
【0117】
なお、上述の説明では、車両の前方監視用レーダ装置を例としたが、車両の前側方や後方監視レーダ装置にも本実施形態が適用できる。
【0118】
以上説明したとおり、本実施形態によれば、個々のピーク信号グループが目標物体ごとに検出されたか否かを判断し、目標物体の誤検出や検出もれを回避できる。
【図面の簡単な説明】
【0119】
【図1】本実施形態におけるレーダ装置の使用状況を説明する図である。
【図2】レーダ装置10を中心とする上記車両制御システムの概略構成を説明する図である。
【図3】レーダ送受信機10aの送信動作について説明する図である。
【図4】送信信号と受信信号との対応関係を説明する図である。
【図5】方位角θごとのピーク信号について説明する図である。
【図6】アップ/ダウンピーク信号グループについて説明する図である。
【図7】本実施形態における信号処理装置14の動作手順を説明するフローチャート図である。
【図8】画像認識結果から導出される目標物体の方位角について説明する図である。
【図9】第1の実施例におけるグループ検出手段14bの判断方法を説明する図である。
【図10】第1の実施例におけるグループ検出手段14bの動作手順を説明するフローチャート図である。
【図11】第2の実施例におけるグループ検出手段14bの判断方法を説明する図である。
【図12】第2の実施例におけるグループ検出手段14bの動作手順を説明するフローチャート図である。
【図13】第3の実施例におけるグループ検出手段14bの動作手順を説明するフローチャート図である。
【図14】第4の実施例における目標物体情報検出手段14cの動作手順を説明するフローチャート図である。
【図15】第5の実施例におけるグループ検出手段14bの動作手順を説明するフローチャート図である。
【図16】第6の実施例における目標物体情報検出手段14cの動作手順を説明するフローチャート図である。
【符号の説明】
【0120】
1:車両、10:レーダ装置、10a:レーダ送受信機、14:信号処理装置、14a:ピーク信号検出手段、14b:グループ検出手段、14c:目標物体情報検出手段、100:車両制御装置
【技術分野】
【0001】
本発明は、探索領域内の方位角ごとにレーダ信号を送受信し、送受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置等に関し、特に、方位角ごとにビート信号の周波数スペクトルにおけるピーク信号を検出して、複数の方位角で周波数が一致または近似し、かつ極大値を形成するピーク信号グループに基づき目標物体情報を検出する信号処理装置等に関する。
【背景技術】
【0002】
車両走行の自動制御を支援する車載用レーダ装置は、目標物体の相対速度、相対距離、及び方位角といった目標物体情報を検出し、車両の制御装置に出力することが求められる。レーダ装置が目標物体の相対速度、相対距離を検出する方法として、FM−CW(Frequency Modulated Continuous Wave)方式が知られている。
【0003】
FM−CW方式のレーダ装置は、周波数が直線的な上昇と下降とを交互に繰り返すように周波数変調した電磁波をレーダ信号として探索領域に送信し、目標物体からの反射信号を受信する。このとき、反射信号の周波数は、目標物体の相対距離に応じた時間的遅延と相対速度に応じたドップラシフトの影響を受けて偏移する。よってレーダ装置は、送受信信号の周波数差を解析することにより、目標物体の相対速度と相対距離を検出する。
【0004】
また、レーダ装置が目標物体の方位角を検出する方法として、アンテナを機械的に回動させることにより探索領域内の方位角ごとにレーダ信号を送受信し、受信時のアンテナの回動角度に基づいて目標物体の方位角を検出するメカニカルスキャン方式が知られている。車載用レーダ装置においては、FM−CW方式とメカニカルスキャン方式とが組み合わせて用いられる。
【0005】
かかるレーダ装置は、まず方位角ごとに送信信号と受信信号とを乗算し、送受信信号の周波数差を有するビート信号を生成する。上述したように、ビート信号の周波数(ビート周波数)は反射信号を反射した物体の相対速度、相対距離に応じて異なるので、路面などによる反射信号から得られたビート信号と目標物体による反射信号から得られたビート信号とを分離するために、レーダ装置は方位角ごとにビート信号の周波数スペクトルを検出し、さらにその周波数スペクトルからピーク信号を検出する。
【0006】
すると、方位角方向にある程度の反射断面積を有する目標物体からは、隣接する複数の方位角においてその目標物体の相対速度、相対距離を反映したビート周波数を有し、かつ分布形状の中心付近で極大値を形成するピーク信号グループが検出される。
【0007】
かかるピーク信号グループは単一の目標物体から得られた蓋然性が大きいことから、レーダ装置はピーク信号グループに基づいて目標物体の相対速度、相対距離、及び方位角を検出する。このようにして目標物体情報を検出する車載用レーダ装置の例が、特許文献1に記載されている。
【特許文献1】特開2003−149325号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、上記のような車載用のレーダ装置においては、次のような問題が生じる。まず、目標物体の反射断面積の形状によっては、単一の目標物体から複数のピーク信号グループが検出される場合がある。例えば、トラックの荷台などは凹凸があるので反射位置によってピーク信号に強弱が生じ、反射面の中心部以外で複数の極大値が形成される。すると、実際は単一の目標物体しか存在しないにも関わらず、複数の目標物体についての目標物体情報を誤検出するおそれがある。
【0009】
また、反射断面積が異なる複数の目標物体が近接して一時的に並走するようなときに、複数の目標物体から単一のピーク信号グループが検出される場合がある。例えば、大型車と小型のバイクとが互いに近接して一時的に並走するような場合には、両者の相対速度と相対距離は一時的に一致または近似する。このため、ピーク信号のビート周波数も一致または近似するので、大型車から得られるレベルが大きいピーク信号グループに小型バイクから得られるレベルが小さいピーク信号グループが埋もれてしまう。すると、小型のバイクが目標物体として検出されないおそれがある。
【0010】
このように、従来のレーダ装置は、単一の目標物体から複数のピーク信号グループが検出されることによる目標物体情報の誤検出や、複数の目標物体から単一のピーク信号グループが検出されることによる目標物体情報の検出もれという問題がある。
【0011】
そこで、本発明の目的は、個々のピーク信号グループが目標物体ごとに検出されたか否かを判断し、目標物体情報の誤検出や検出もれを回避できる、レーダ装置とその信号処理装置を提供することにある。
【課題を解決するための手段】
【0012】
本発明の第1の側面における信号処理装置は、周波数変調したレーダ信号を探索領域内の方位角ごとに送受信し、送受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置であって、前記方位角ごとに前記ビート信号の周波数スペクトルにおけるピーク信号を検出するピーク信号検出手段と、複数の方位角で周波数が一致または近似し、かつ極大値を形成するピーク信号グループを検出するグループ検出手段と、前記ピーク信号グループに基づき相対距離を含む目標物体情報を検出する目標物体情報検出手段とを有し、前記グループ検出手段は、前記探索領域の画像認識結果に基づき導出された単一の目標物体の方位角に複数のピーク信号グループの方位角が対応する場合には、当該複数のピーク信号グループを代表するピーク信号グループを検出することを特徴とする。
【0013】
本発明の第2の側面における信号処理装置は、周波数変調したレーダ信号を探索領域内の方位角ごとに送受信し、送受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置であって、前記方位角ごとに前記ビート信号の周波数スペクトルにおけるピーク信号を検出するピーク信号検出手段と、複数の方位角で周波数が一致または近似し、かつ極大値を形成するピーク信号グループを検出するグループ検出手段と、前記ピーク信号グループに基づき相対距離を含む目標物体情報を検出する目標物体情報検出手段とを有し、前記グループ検出手段は、前記探索領域の画像認識結果に基づき導出された複数の目標物体の方位角に単一のピーク信号グループの方位角が対応する場合には、当該ピーク信号グループを前記複数の目標物体の方位角にそれぞれ対応する複数のピーク信号グループに分離することを特徴とする。
【発明の効果】
【0014】
本発明によれば、個々のピーク信号グループが目標物体ごとに検出されたか否かを判断することにより、目標物体の誤検出や検出もれを回避できる。
【発明を実施するための最良の形態】
【0015】
以下、図面にしたがって本発明の実施の形態について説明する。但し、本発明の技術的範囲はこれらの実施の形態に限定されず、特許請求の範囲に記載された事項とその均等物まで及ぶものである。
【0016】
図1は、本実施形態におけるレーダ装置の使用状況を説明する図である。ここでは、周囲の状況に応じて車両1の走行を自動制御する、車両制御システムの構成例が示される。レーダ装置10は、かかるシステムにおいて画像認識装置50とともに車両1の周囲の状況を検出する手段として用いられる。
【0017】
レーダ装置10は、FM−CW方式とメカニカルスキャン方式とを組み合わせたレーダ装置である。レーダ装置10は、車両1の前部バンパー内部やフロントグリル内部に搭載され、周波数変調した電磁波をレーダ信号として送受信する。レーダ装置10は、アンテナを回動させることにより車両1前方の探索領域内の方位角ごとにレーダ信号を送信し、目標物体による反射信号を受信する。そしてレーダ装置10は、送受信信号からビート信号を生成してこれをマイクロコンピュータなどの信号処理装置により処理し、目標物体の相対距離、相対速度、及び方位角といった目標物体情報を検出する。ここで目標物体は、例えば車両1の先行車両、対向車両などである。
【0018】
画像認識装置50は、車両1前方の画像を撮影する画像センサ(画像収集装置)とこれによる撮影画像データを処理する画像認識部とを有する。画像認識装置50は、車両1のフロントガラス上部近傍の車室内に搭載され、画像センサの撮影領域がレーダ装置10の探索領域と重複し、かつ撮影領域と探索領域の中心が一致するように位置決めされる。そして、画像認識装置50は、フロントガラス越しに車両1前方の探索領域を画像センサにより撮影し、画像認識部により撮影画像内の目標物体を画像認識してその位置を検出する。
【0019】
本実施形態では、レーダ装置10は目標物体情報を検出する際に画像認識装置50による画像認識結果を用いて誤検出や検出もれを回避する。そして、レーダ装置10は検出した目標物体情報を車両制御装置100に出力する。
【0020】
車両制御装置100は、目標物体情報に基づいて車両1の各種アクチュエータを駆動することにより車両1の走行を自動制御する。例えば、先行車両を追尾して一定の車間距離で追従走行したり、相対速度や相対距離から先行車両や対向車との衝突が予測されるときには衝突を回避したり、あるいは、警報装置や乗員保護装置を作動させたりする。
【0021】
図2は、レーダ装置10を中心とする上記車両制御システムの概略構成を説明する図である。レーダ装置10は、上述したようにFM−CW方式とメカニカルスキャン方式とを組み合わせたレーダ装置であり、周波数変調したレーダ信号を探索領域内の方位角ごとに送受信し、送受信信号の周波数差を有するビート信号を生成するレーダ送受信機10aと、ビート信号を処理する信号処理装置14とを有する。
【0022】
レーダ送受信機10aは、送信用レーダ信号を生成する構成として、三角波状に電圧が変化する変調信号を生成する変調信号生成部17と、変調信号の電圧に対応した周波数のレーダ信号を発振するVCO(電圧制御発振器)18を有し、さらに送信用レーダ信号を送信するアンテナ素子11を備えたアンテナ13を有する。また、レーダ送受信機10aは、目標物体に反射された反射信号を受信するアンテナ素子12をアンテナ13に備え、さらにビート信号を生成する構成として、送信信号の一部を分配する分配器20と、分配された送信信号と受信信号を乗算して両者の周波数差を有するビート信号を生成するミキサ22と、ミキサ22から高周波ノイズや直流成分を除去する帯域通過フィルタ23とを有する。そして、レーダ送受信機10aが生成したビート信号はA/D変換器24によりデジタルデータに変換されて、信号処理装置14に入力される。なお、A/D変換器24は、信号処理装置14側に設けてもよい。
【0023】
また、レーダ送受信機10aは、探索領域内の方位角ごとにレーダ信号を送受信する手段として、モータとクランク機構とを備えアンテナ13を往復回動させる駆動部25を有し、さらにアンテナ13の回動角度(アンテナ角度)を検知するロータリエンコーダ26を有する。ロータリエンコーダ26が検知したアンテナ角度信号は、信号処理装置14に入力される。
【0024】
信号処理装置14は、一例として、ビート信号をFFT(高速フーリエ変換)処理して周波数スペクトルを検出するDSP(Digital Signal Processor)などのプロセッサと、マイクロコンピュータとを有する。そしてマイクロコンピュータは、入力されるデータを用いて各種演算処理を行うCPU(Central Processing Unit)と、CPUが実行する処理手順が記述されたプログラムを格納したROM(Read Only Memory)と、作業領域としてのRAM(Random Access Memory)とを有する。
【0025】
ここで、ピーク信号検出手段14a、グループ検出手段14b、及び目標物体情報検出手段14cは、後述するそれぞれの処理手順を記述した処理プログラムとこれに従って動作するマイクロコンピュータのCPUにより構成される。
【0026】
また、信号処理装置14は、後述するように、アンテナ13の回動角度とレーダ信号の周波数変調周期を同期させるための制御信号を、変調信号生成部17と駆動部25に出力する。また、信号処理装置14は、ロータリエンコーダ26からのアンテナ角度信号に基づいてアンテナ13の回動角度を検出することで、アンテナ13が指向する方位角を検出する。
【0027】
一方、画像認識装置50は、画像センサ52と、画像センサ52による撮影画像データを処理する画像認識部54とを有する。画像認識部54は、一例として、ASIC(Application Specific Integrated Circuit)で構成され、撮影画像を構成する画素の階調値を二値化し、二値化された画素の分布形状に基づき被写体の輪郭(エッジ)を検出する。画像認識部54は、予め目標物体のエッジ形状パターンを内蔵のROMに格納しており、撮影画像内における被写体のエッジ形状を照合して目標物体を検出する。そして、画像認識部54は、撮影画像内における目標物体のエッジ位置を検出し、これをレーダ装置10の信号処理装置14に画像認識結果として出力する。
【0028】
上記構成におけるレーダ送受信機10aの、探索領域内の方位角ごとにレーダ信号を送受信し、送受信信号の周波数差を有するビート信号を生成する動作について、図3、図4を用いて説明する。
【0029】
図3は、レーダ送受信機10aの送信動作について説明する図である。まず、図3(A)は、送信信号の周波数(縦軸)の時間(横軸)に対する変化を示す。変調信号生成部17が生成する変調信号は、直線的に電圧が上昇する上り変調区間と、直線的に電圧が下降する下り変調区間を有する三角波を形成する。よって、これに従ってVCO18が生成する送信信号の周波数は、図示するように、上り変調区間UPで上昇し、下り変調区間DNで下降する。以下では、送信信号の変調周期を1/fm(例えばfm=400Hz)、周波数偏移幅をΔF(例えばΔF=100MHz)、中心周波数f0(例えばf0=76.5GHz)とする。
【0030】
図3(B)は、アンテナ13の回動角度に対応する方位角(縦軸)の時間(横軸)に対する変化を示す。レーダ送受信機10aは、車両1の前方正面に対応する方向を0度として、探索領域に対応する角度範囲±α(例えば、±10度)でアンテナ13を往復回動させる。
【0031】
このとき、信号処理装置14が出力する制御信号に同期して変調信号生成部17、駆動部25が動作することにより、図3(A)、(B)に示すように、方位角θ(例えば1度)につき一対の上り変調区間UPと下り変調区間DNが対応するようにアンテナ13の回動速度と送信信号の周波数変調周期の同期がとられる。このような動作により、レーダ送受信機10aは、方位角θごとに周波数偏移幅をΔFで周波数が上昇及び下降するレーダ信号を送信し、その方位角に存在する目標物体から反射信号を受信する。すなわち、探索領域内をレーダ信号により走査する。
【0032】
図4は、送信信号と受信信号との対応関係を説明する図である。図4(A)は、各信号における周波数(縦軸)の時間(横軸)に対する変化を示す。実線で示す送信信号の周波数に対し、破線で示す受信信号の周波数は、目標物体の相対距離による遅延ΔTと、相対速度に応じたドップラ効果による周波数偏移γを受ける。その結果、送受信信号には、上り変調区間UPで周波数fu、下り変調区間DNで周波数fdの周波数差が生じる。
【0033】
図4(B)は、送受信信号を乗算することにより生成されるビート信号の周波数(縦軸)の時間(横軸)に対する変化を示す。以下では便宜上、上り変調区間におけるビート信号をアップビート信号、その周波数をアップビート周波数といい、下り変調区間におけるビート信号をダウンビート信号、その周波数をダウンビート周波数という。よって、アップビート信号はアップビート周波数fu、ダウンビート信号はダウンビート周波数fdを有する。
【0034】
このようにしてレーダ送受信機10aは、探索領域内の方位角θごとにレーダ信号を送受信し、上り変調区間と下り変調区間のそれぞれで送受信信号をミキシングして送受信信号の周波数差を有するアップ/ダウンビート信号を生成する。
【0035】
このようなアップ/ダウンビート信号は、A/D変換されて信号処理装置14に取り込まれる。そして、信号処理装置14は、アンテナ13の回動角度から送受信時にアンテナ13が指向する方位角θを検出し、方位角θごとにアップ/ダウンビート信号それぞれをFFT処理して周波数スペクトルを検出する。
【0036】
次に、ピーク信号検出手段14a、グループ検出手段14b、及び目標物体情報検出手段14cの動作について説明する。
【0037】
まず、ピーク信号検出手段14aは、方位角θごとにアップ/ダウンビート信号の周波数スペクトルにおけるピーク信号を検出する。
【0038】
図5は、方位角θごとのピーク信号について説明する図である。図5(A)はアップビート信号の周波数スペクトル、図5(B)はダウンビート信号の周波数スペクトルの例を示す。
【0039】
ピーク信号検出手段14aは、このような方位角ごとのビート信号の周波数スペクトルにおいて、閾値Thv(ノイズ成分を除去するための閾値であって、任意に定める閾値)以上のレベルで極大値を形成するピーク信号を検出する。ここでは、説明の便宜のために1つのピークが検出される場合を示すと、図5(A)に示すように、アップビート信号では、アップビート周波数fuで極大値を形成するピーク信号Puが検出される。また、図5(B)に示すように、ダウンビート信号では、ダウンビート周波数fdで極大値を形成するピーク信号Pdが検出される。なお、以下では説明の便宜上、アップビート信号におけるピーク信号をアップピーク信号、ダウンビート信号におけるピーク信号をダウンピーク信号という。
【0040】
このような処理を方位角θごとに実行することにより、ある程度の反射断面積を有する目標物体からは、隣接する複数の方位角においてその目標物体の相対速度、相対距離を反映したアップ/ダウンビート周波数を有するアップ/ダウンピーク信号が検出される。
【0041】
そして、一般的に1つの目標物体はその反射断面の中心部で最大の反射断面積を有し、したがって中心部付近からの反射信号により生成されたピーク信号のレベルが最大となることから、グループ検出手段14bは、複数の方位角でアップ/ダウンビート周波数が一致または近似(同一目標物体とみなせる程度の誤差範囲であって、任意に設定できる誤差範囲内にあれば近似とみなす)し、かつ極大値を形成するピーク信号グループを検出する。
【0042】
図6は、アップ/ダウンピーク信号グループについて説明する図である。図6(A)は、レーダ装置10を基準として、方位角−α〜+αの範囲におけるアップピーク信号の周波数分布を示す。また、図6(B)は、レーダ装置10を基準として、方位角−α〜+αの範囲におけるダウンピーク信号の周波数分布を示す。
【0043】
ここでは、アップ/ダウンピーク信号のそれぞれで2つのアップ/ダウンピーク信号グループが検出される場合を示す。また、アップ/ダウンピーク信号を示す棒線の長さは、各ピーク信号のレベルの大きさに対応する。グループ検出手段14bは、図6(A)に示すように、アップピーク信号からは、隣接する複数の方位角においてアップピーク信号Pu1で極大値を形成するアップビート周波数fu1のアップピーク信号グループGPu1と、アップピーク信号Pu2で極大値を形成するアップビート周波数fu2のアップピーク信号グループGPu2を検出する。また、図6(B)に示すように、ダウンピーク信号からは、隣接する複数の方位角においてダウンピーク信号Pd1で極大値を形成するダウンビート周波数fd1のダウンピーク信号グループGPd1と、ダウンピーク信号Pd2で極大値を形成するダウンビート周波数fd2のダウンピーク信号グループGPd2を検出する。なお、極大値は、グループ内のアップ/ダウンピーク信号の最大値を求めてもよいし、グループ内のアップ/ダウンピーク信号のレベルを曲線近似することにより求めてもよい。かかるアップ/ダウンピーク信号グループを検出する処理を、グルーピング処理という。
【0044】
そして、目標物体情報検出手段14cは、アップ/ダウンピーク信号グループに基づき、目標物体の相対距離もしくは相対速度、及び方位角を含む目標物体情報を検出する。具体的な方法としては、目標物体情報検出手段14cは、まず各アップ/ダウンピーク信号グループで極大値を形成するアップ/ダウンピーク信号にそれぞれのアップ/ダウンピーク信号グループを代表させ、代表のアップ/ダウンピーク信号のレベルまたは方位角が一致または近似するアップ/ダウンピーク信号グループを対応付けする、ペアリング処理を行う。このとき代表のアップ/ダウンピーク信号のレベルまたは方位角が、同一目標物体とみなせる程度の誤差範囲であって、任意に設定できる誤差範囲内にあれば近似とみなす。よって上記の例では、アップピーク信号グループGPu1を代表するアップピーク信号Pu1のレベルL1または方位角θ1と、ダウンピーク信号グループGPd1を代表するダウンピーク信号Pd1のレベルL1または方位角θ1がそれぞれ一致するので、アップピーク信号グループGPu1とダウンピーク信号グループGPd1とがペアリングされる。また、アップピーク信号グループGPu2を代表するアップピーク信号Pu2のレベルL2または方位角θ2と、ダウンピーク信号グループGPd2を代表するダウンピーク信号Pd2のレベルL2または方位角θ2がそれぞれ一致するので、アップピーク信号グループGPu2とダウンピーク信号グループGPd2とがペアリングされる。
【0045】
ここにおいて、同一目標物体から得られた蓋然性の高いアップピーク信号グループのアップビート周波数と、ダウンピーク信号グループのダウンビート周波数とが対応づけされる。すなわち、アップピーク信号グループGPu1とダウンピーク信号グループGPd1のペアではアップビート周波数fu1とダウンビート周波数fd1が対応づけされ、アップピーク信号グループGPu2とダウンピーク信号グループGPd2のペアではアップビート周波数fu2とダウンビート周波数fd2が対応づけされる。
【0046】
そして、目標物体情報検出手段14cは、次式に従って、各ペアごとに目標物体の相対速度、相対距離を算出する。ここで、fuはアップビート周波数、fdはダウンビート周波数、Cは光速、fmは三角波の周波数、f0は送信信号の中心周波数、ΔFは周波数偏移幅を示す。
【0047】
相対距離:R=C・(fu1+fd1)/(8・ΔF・fm) …式(1)
相対速度:V=C・(fd1−fu1)/(4・f0) …式(2)
また、目標物体情報検出手段14cは、ペアリングにより対応づけしたアップ/ダウンピーク信号グループそれぞれを代表するアップ/ダウンピーク信号の方位角の平均、あるいは、アップ/ダウンピーク信号グループの中心の方位角が目標物体の方位角として検出する。
【0048】
上記のような処理を実行することにより、目標物体の相対速度、相対距離、及び方位角といった目標物体情報が検出される。
【0049】
ここで、上述した処理動作を含む信号処理装置14によるメインの動作手順を説明する。
【0050】
図7は、本実施形態における信号処理装置14の動作手順を説明するフローチャート図である。図7の手順は、レーダ送受信機10aが探索領域内をレーダ信号により1回走査するごとに実行される。ピーク信号検出手段14aは、探索領域内の方位角θごとにアップ/ダウンビート信号それぞれをFFT処理して周波数スペクトルを検出する(S2)。そして、周波数スペクトルにおけるピーク信号を検出する(S4)。
【0051】
次に、グループ検出手段14bは、方位角方向におけるアップ/ダウンピーク信号から、周波数が一致または近似し、かつ極大値を形成するアップ/ダウンピーク信号グループを検出するグルーピング処理を行う(S6)。
【0052】
次に、目標物体情報検出手段14cは、アップ/ダウンピーク信号グループのそれぞれで、各グループを代表するアップ/ダウンピーク信号を基準にして、アップ/ダウンピーク信号グループ同士を対応付けするペアリング処理を行う(S8)。そして、ペアリングされたアップ/ダウンピーク信号グループごとに、目標物体情報を検出する(S10)。
【0053】
そして、目標物体検出手段14cは、過去に検出された目標物体情報の履歴との連続性の有無を判定し(S12)、車両制御上の優先順、たとえば相対速度、相対距離から算出される衝突予測時間が短い順に目標物体情報をソートする出力判定を実行する(S14)。そして、優先順に目標物体情報を車両制御装置100に向けて出力する(S16)。
【0054】
ところで、上記のグルーピング処理(手順S6)では、目標物体の反射断面積の形状によっては、単一の目標物体から複数のピーク信号グループが検出される場合がある。例えば、トラックの荷台などは凹凸があるので反射位置によってピーク信号に強弱が生じ、反射面の中心部以外で複数の極大値が形成される場合である。この場合、実在しない目標物体について目標物体情報を誤検出するおそれがある。
【0055】
また、複数の目標物体から単一のアップ/ダウンピーク信号グループしか検出されない場合がある。例えば、大型車と小型のバイクとが互いに近接して一時的に並走するような場合には、両者の相対速度と相対距離は一時的に一致または近似する。このため、ピーク信号のビート周波数も一致または近似するので、大型車から得られるレベルが大きいピーク信号グループに小型バイクから得られるレベルが小さいピーク信号グループが埋もれてしまう場合である。この場合、実在する目標物体について目標物体情報の検出もれのおそれがある。
【0056】
この点、画像認識装置50によれば、撮影画像中エッジに囲まれた領域として目標物体を認識するので、例えば分解能が低い画像センサを用いたり、単眼の画像認識装置を用いたりした場合であっても、単一の目標物体を複数の異なる目標物体として認識したり、複数の異なる目標物体を単一の目標物体として認識したりする可能性はレーダ装置より低い。
【0057】
本実施形態ではかかる画像認識の特徴を利用して、個々のアップ/ダウンピーク信号グループが目標物体ごとに検出されたか否かを判断する。すなわち、グループ検出手段14bは、画像認識装置50による探索領域の画像認識結果に基づき導出した目標物体の方位角に複数のアップ/ダウンピーク信号グループの方位角が対応する場合には、当該複数のアップ/ダウンピーク信号グループを代表するアップ/ダウンピーク信号グループを検出する。そして、目標物体情報検出手段14cは、複数のアップ/ダウンピーク信号グループを代表するアップ/ダウンピーク信号グループに基づいて目標物体情報を検出する。よって、単一の目標物体から複数のアップ/ダウンピーク信号グループが検出された場合に、実在しない目標物体についての目標物体情報を誤検出することを回避できる。
【0058】
また、グループ検出手段14bは、画像認識装置50による探索領域の画像認識結果に基づき導出した複数の目標物体の方位角に単一のアップ/ダウンピーク信号グループの方位角が対応する場合には、当該アップ/ダウンピーク信号グループを前記複数の目標物体の方位角にそれぞれ対応する複数のアップ/ダウンピーク信号グループに分離する。そして、目標物体情報検出手段14cは、分離されたアップ/ダウンピーク信号グループごとに目標物体情報を検出する。よって、レベルの小さいアップ/ダウンピーク信号グループがレベルの大きいアップ/ダウンピーク信号グループに埋もれる場合に、実在する目標物体についての目標物体情報の検出もれを回避できる。
【0059】
ここで、グループ手段14bの具体的な動作の説明に先立ち、画像認識装置50による画像認識結果と目標物体の方位角との対応関係について、図8を用いて説明する。
【0060】
図8(A)は、画像センサ52による撮影画像を模式的に示す。ここでは、説明の便宜上、1つの目標物体が撮影された場合を例とする。画像認識装置50は、図示するような探索領域の撮影画像Pic内に含まれる目標物体画像ObのエッジEdを検出すると、エッジEdの下端部、及び左右端部の撮影画像Pic内での位置を検出する。ここでは、エッジEdの下端部の位置は撮影画像Pic下端部からの距離PosB、エッジEdの左右端部の位置は、撮影画像Picの中心Ctからの距離PosL、PosRとする。このようにして検出されたエッジ位置は、画像認識結果としてレーダ装置10の信号処理装置14に入力される。
【0061】
次に、レーダ装置10を基準とする探索領域の平面図を図8(B)に示すと、画像センサ52とレーダ装置10の位置関係は固定されており、撮影画像Picの中心Ctは方位角0度に一致しているので、平地で撮影された場合における目標物体画像ObのエッジEd下端の撮影画像Pic内での位置は、レーダ装置10から方位角0度方向の相対距離に概ね対応している。よって、上記のエッジEd下端の撮影画像Pic内での位置PosBに対応するレーダ装置10から方位角0度方向の相対距離を距離Dsとすると、目標物体画像ObのエッジEd左右端の撮影画像Pic内での位置PosL、PosRに対応する方位角βL、βRが、距離Dsに対応して求められる。
【0062】
このことを利用し、グループ検出手段14bは、画像認識装置50から入力されるエッジ位置に対応する目標物体の左右端部の方位角角βL、βRを算出する。あるいは、画像認識部54がエッジ位置に対応する目標物体の左右端部の方位角角βL、βRを算出し、グループ検出手段14bは算出結果を取得してもよい。ここにおいて、目標物体の左右端部の方位角角βL、βRが、「画像認識結果に基づき導出された目標物体の方位角」に対応する。そして、グループ検出手段14bは、方位角角βL、βRに基づいて、アップ/ダウンピーク信号グループが目標物体ごとに検出されたか否かを判断する。
【0063】
なお、以下でのグループ検出手段14bの動作の説明は、アップ/ダウンピーク信号グループのそれぞれに対して適用される。このため説明の便宜上、アップピーク信号グループ、ダウンピーク信号グループを区別せず、単にピーク信号グループとして説明する。
【0064】
[第1の実施例]
第1の実施例では、グループ検出手段14bは、複数のピーク信号グループが同一の目標物体から検出されたか否かを判断する。
【0065】
図9は、かかる判断の方法を説明する図である。図9(A)は、第1の実施例における車両1の周囲の状況を示す平面図である。車両1の前方を目標物体(例えば大型トラック)が走行している。図9(B)は、図9(A)の状況で得られる撮影画像と、画像認識結果に基づく目標物体の方位角βL、βRの対応を示す。図9(C)は、レーダ装置10を基準として、方位角−α〜+αの範囲におけるピーク信号(棒線の長さはピーク信号のレベルを示す)の周波数分布を示す。ここでは、ビート周波数fb1を有するピーク信号グループGP11、GP12が検出された場合が示される。
【0066】
ここで、図9(C)に、画像認識結果に基づき導出した目標物体の左右端部の方位角βL、βRを示す。すると、図示するように、ピーク信号グループGP11における左端の方位角θLは方位角βLより大きく、かつピーク信号グループGP12における右端の方位角θRは方位角βRより小さいので、ピーク信号グループGP11、GP12は方位角βL〜βRの範囲内に含まれる。よってこの場合、グループ検出手段14bは、ピーク信号グループGP11、GP12は同一の目標物体から得られたものと判断する。なおここにおいて、ピーク信号グループGP11における左端の方位角θL、ピーク信号グループGP12における右端の方位角θRがそれぞれ「ピーク信号グループの方位角」に対応する。
【0067】
上記のように判断した場合、グループ検出手段14bは、ピーク信号グループGP11、GP12を代表する代表ピーク信号グループを検出する。例えば、ピーク信号グループGP11、GP12のうち例えばピーク信号グループGP11の方が極大値のレベルが大きいとすると、ピーク信号グループGP11を代表のピーク信号グループとして検出する。それとともに、ピーク信号グループGP12を除外する。
【0068】
そして、目標物体情報検出手段14cは、代表のピーク信号グループGP11に対するペアリング処理を行うことにより、目標物体情報を検出する。そうすることにより、実在しない目標物体についての目標物体情報を誤検出することを回避できる。
【0069】
なお、ピーク信号グループGP11、GP12を代表する代表ピーク信号グループを検出する際に、ピーク信号グループGP11、GP12のビート周波数が多少異なる場合(つまり、ビート周波数が近似する場合)には、低いビート周波数を有するピーク信号グループを代表のピーク信号グループとして検出してもよい。上述した式(1)に示すように、アップ/ダウンビート周波数が低いほど検出される相対距離が小さくなるので、より近距離にあって車両制御上重要度の高い目標物体の目標物体情報を確実に検出できる。
【0070】
図10は、第1の実施例における目標物体情報検出手段14cの動作手順を説明するフローチャート図である。図9を参照しつつ、目標物体情報検出手段14cの動作手順を説明する。
【0071】
図10(A)の手順は、図7に示した手順S6を代替する手順である。グループ検出手段14bは、画像認識装置50から取得した画像認識結果に基づいて、目標物体の方位角を算出する(S20)。あるいは、グループ検出手段14bは、画像認識装置50が画像認識結果に基づいて算出した目標物体の方位角を画像認識装置50から取得してもよい。そして、手順S8と同様のグルーピング処理を実行する(S22)。そして、複数のピーク信号グループGP11、GP12が同一の目標物体から検出されたか否かを判断する処理を実行する(S24)。なお、手順S24は、アップピーク信号グループ、ダウンピーク信号グループそれぞれについて実行される。
【0072】
図10(B)は、図10(A)の手順S24のサブルーチンに対応する手順である。グループ検出手段14bは、ピーク信号グループGP11における左端の方位角θLが方位角βLより大きく、かつGP12における右端の方位角θRが方位角βRより小さいかを判断する。すなわち、アップピーク信号グループGP11、GP12が方位角βL〜βRの範囲内に含まれるか否かを判断する(S242)。結果がYESの場合には、ピーク信号グループGP11、GP12のビート周波数が一致または近似するかを判断する(S244)。ここで、ピーク信号グループGP11、GP12のビート周波数が、同一目標物体として判断可能な誤差範囲内であって任意に設定される誤差範囲内にあれば近似と判断する。図9の例では、ピーク信号グループGP11、GP12のビート周波数はfb1で一致しているので判断結果は「YES」であるから、ピーク信号グループGP11、GP12の代表ピーク信号グループGP11を検出する(S246)。そして、ペアリング処理を実行する際の代表値として、代表アップピーク信号グループGP11におけるレベルが最大のアップピーク信号のレベルまたは方位角を算出する(S248)。
【0073】
複数のピーク信号グループが同一の目標物体から検出された場合であっても上記のような手順を実行することにより、代表のピーク信号グループに基づくペアリング処理(図7の手順S8)が実行される。よって、実在しない目標物体についての目標物体情報を誤検出することを回避できる。
【0074】
[第2の実施例]
第2の実施例では、グループ検出手段14bが、単一のピーク信号グループが複数の目標物体から検出されたか否かを判断する。
【0075】
図11は、かかる判断の方法を説明する図である。図11(A)は、第2の実施例における車両1の周囲の状況を示す平面図である。車両1の前方を第1の目標物体(例えば小型バイク)と第2の目標物体(例えば大型トラック)が並走している。図11(B)は、図11(A)の状況で得られる撮影画像と、画像認識結果に基づく第1の目標物体の方位角β1L、β1R、及び第2の目標物体の方位角β2L、β2の対応を示す。そして、図11(C)は、レーダ装置10を基準として、方位角−α〜+αの範囲におけるピーク信号(棒線の長さはピーク信号のレベルを示す)の周波数分布を示す。ここでは、ビート周波数fb3を有するピーク信号グループGP3が検出された場合が示される。
【0076】
ここで、図11(C)に、第1の目標物体の左右端部に対応する方位角β1L、β1Rと、第2の目標物体の左右端部に対応する方位角β2L、β2Rとを示す。この場合、まず第1の目標物体の左右端部に対応する方位角β1L、β1Rとピーク信号グループGP3における左右端の方位角θL、θR、及び極大値の方位角θMの関係を見てみる。ここにおいて、方位角θL、θR、及びθMが、ピーク信号グループGP3の方位角に対応する。すると、ピーク信号グループGP3における左端の方位角θLは方位角β1Lより小さく、かつピーク信号グループGP3における右端の方位角θRは方位角β1Lより大きい。さらに、ピーク信号グループGP3における極大値の方位角θMは、方位角β1Lより小さい。よってまず、グループ検出手段14bは、ピーク信号グループGP3のうち、第1の目標物体に対応する方位角β1L〜β1Rに対応する部分をピーク信号グループGP31として分離する。
【0077】
次に、第2の目標物体の左右端部に対応する方位角β2L、β2Rとピーク信号グループGP3における左右端の方位角θL、θR、及び極大値の方位角θMの関係を見てみると、ピーク信号グループGP3における左端の方位角θLは方位角β2Rより小さく、かつピーク信号グループGP3における右端の方位角θRは方位角β2Rより大きい。さらに、ピーク信号グループGP3における極大値の方位角θMは、方位角β2Rより小さい。よってこの場合、ピーク信号グループGP3における極大値は、第2の目標物体に対応する方位角β2L〜β2Rの範囲で形成されるので、グループ検出手段14bは、ピーク信号グループGP3からピーク信号グループGP31を分離した残りの部分から、方位角β2L〜β2Rに対応する部分をピーク信号グループGP32として検出する。この場合、ピーク信号グループGP32はピーク信号グループGP31より反射断面積が大きい目標物体を示す蓋然性が大きい。
【0078】
そして、目標物体情報検出手段14cは、分離したピーク信号グループについて上述したペアリング処理を実行することにより、目標物体情報を検出する。このようにして、小型の目標物体についての目標物体情報の検出もれを回避できる。
【0079】
図12は、第2の実施例におけるグループ検出手段14bの動作手順を説明するフローチャート図である。図11を参照しつつ、グループ検出手段14bの動作手順を説明する。
【0080】
図12(A)の手順は、図7に示した手順S6を代替する手順である。グループ検出手段14bは、画像認識装置50から取得した画像認識結果に基づいて、目標物体の方位角を算出する(S30)。あるいは、グループ検出手段14bは、画像認識装置50が画像認識結果に基づいて算出した目標物体の方位角を画像認識装置50から取得してもよい。そして、手順S8と同様のグルーピング処理を実行する(S32)。そして、アップピーク信号グループ、ダウンピーク信号グループごとに、ピーク信号グループGP3が複数の目標物体から検出されたか否かを判断する処理を実行する(S34)。
【0081】
図12(B)は、図12(A)の手順S34のサブルーチンに対応する手順である。グループ検出手段14bは、まず複数の目標物体の方位角を算出した場合に、どの目標物体の方位角を用いるかを選択する(S341)。選択方法としては、画像認識装置50からの画像認識結果に基づき検出した目標物体の相対距離の順にソートした結果と、ピーク信号グループのビート周波数の順にソートした結果とを対応づけることが可能である。上述した式(1)によれば、ビート周波数と目標物体の相対距離は比例するので、かかる方法によれば、画像認識された目標物体に対応する蓋然性が大きいピーク信号グループを選択することができる。
【0082】
あるいは、過去の検出履歴とビート周波数から各ピーク信号グループに対応する相対距離を予測し、この相対距離と画像認識装置50により検出された目標物体の距離とが一致または近似する場合に(同一目標物体と判断可能な誤差範囲であって任意に設定可能な誤差範囲内にあれば近似と判断する)、両者を対応づけてもよい。
【0083】
そして、グループ検出手段14bは、方位角β1L〜β1Rに位置する第1の目標物体について、ピーク信号グループGP3における左端の方位角θLが方位角β1Lより小さく、かつGP3における右端の方位角θRが方位角β1Lより大きいかを判断する(S342)。そして、「YES」の場合、ピーク信号グループGP3における極大値の方位角θMが方位角β1Lより小さいかを判断する(S344)。そして、「YES」の場合、ピーク信号グループGP3のうち方位角β1L〜β1Rに対応するピーク信号を、ピーク信号グループGP31として分離する(S346)。
【0084】
次に、グループ検出手段14bは、方位角β2L〜β2Rに位置する第2の目標物体について、ピーク信号グループGP3における左端の方位角θLが方位角β2Rより小さく、かつGP3における右端の方位角θRが方位角β2Rより大きいかを判断する(S348)。そして、「YES」の場合、ピーク信号グループGP3における極大値の方位角θMが方位角β2Rより小さいかを判断する(S350)。そして、「YES」の場合、ピーク信号グループGP3のうち方位角β2L〜β2Rに対応するピーク信号を、ピーク信号グループGP32として分離する(S352)。
【0085】
ピーク信号グループが複数の目標物体から検出された場合であっても、上記のような手順を実行することにより、分離されたピーク信号グループに基づくペアリング処理(図7の手順S8)が実行される。よって、目標物体情報の検出もれを回避できる。
【0086】
なお、上述した第2の実施例の手順の後に、第1の実施例の手順を実行することも可能である。例えば、大型のトラックと小型のバイクなどが近接しており、大型のトラックからは複数のピーク信号グループが検出され、そのうちの1つが小型バイクからのピーク信号グループを含むような場合に、まず、小型バイクからのピーク信号グループを分離することにより小型バイクを確実に検出し、さらに、小型バイクから分離されたピーク信号グループと大型トラックから得られたピーク信号グループを代表するピーク信号グループを検出することにより、実在しない目標物体の誤検出を防止できる。
【0087】
[第3の実施例]
図8(B)で示したように、グループ検出手段14bは、画像認識装置50から取得した目標物体画像のエッジ位置に基づきその方位角を算出する際に、まずエッジ下端部から目標物体までの相対距離を算出して、これを方位角算出のパラメータとして用いる。このとき、画像センサ52の画素数が少ないと、画像認識装置50が検出したエッジ位置の検出精度が低い場合がある。すると、エッジ位置から求められる距離に誤差が生じ、その結果として方位角に誤差が生じるおそれがある。
【0088】
第3の実施例では、グループ検出手段14bは、画像認識装置50から取得したエッジ位置に基づき算出する相対距離と、過去に目標物体情報検出手段14cが検出した相対距離とが一定の誤差範囲(例えば数十センチ〜1メートル程度)内で一致する場合に、エッジ位置から算出した距離を過去に検出した相対距離により置換して、方位角を算出する。そうすることにより、方位角の誤差を防止する。
【0089】
図13は、第3の実施例におけるグループ検出手段14bの動作手順を説明するフローチャート図である。図13の手順は、図10(A)の手順S20、または図12(A)の手順S30のサブルーチンに対応する。
【0090】
まず、グループ検出手段14bは、画像認識装置50から目標物体のエッジ位置を取得する(S50)。そして、エッジ位置下端部に基づいて目標物体までの相対距離を算出するとともに、その相対距離を用いて目標物体の方位角を算出する(S52)。そして、過去に目標物体情報検出手段14cが検出して信号処理装置14のRAMに格納した目標物体情報を取得する(S54)。
【0091】
そして、手順S52で算出した方位角と一定の誤差範囲(例えば、車両の横幅に対応する方位角範囲)で一致する方位角を有する目標物体情報を抽出する(S56)。
【0092】
そして、手順S52で算出した目標物体の相対距離と、手順S56で抽出した目標物体情報に含まれる相対距離が一定の誤差範囲(例えば、数十センチ〜数メートル)にある場合には(S58のYES)、同一の目標物体である蓋然性が高いので、手順S52で算出した相対距離を手順S56で抽出した過去の相対距離で置換する(S60)。そして、置換した相対距離に基づき目標物体の方位角を算出する(S62)。
【0093】
このような手順によれば、エッジ位置から算出した距離に基づき画像認識された目標物体の方位角を算出する際の誤差を防止できる。よって、精度の低い画像認識装置を用いた場合であっても、個々のピーク信号グループが目標物体ごとに検出されたか否かを判断する処理をより精度よく実行できる。
【0094】
[第4の実施例]
第4の実施例では、目標物体情報検出手段14cは、図7で示したメイン手順における出力判定(手順S14)を行う際、画像認識結果を用いることにより判定の精度を向上させることができる。
【0095】
具体的な状況として、レーダ送受信機10aによる受信信号のレベルがミキサ22、帯域通過フィルタ23、A/D変換器24などの飽和レベルに達すると、信号処理装置14がビート信号をFFT処理する際に高調波が検出される場合がある。かかる高調波に基づくピーク信号を検出し、さらにこのようなピーク信号グループに基づく処理を行うと、実在しない目標物体、つまり虚像を誤検出するおそれがある。
【0096】
あるいは、レーダ装置10をメカニカルスキャン方式ではなく、複数の受信アンテナにおける受信位相差に基づき目標物体の方位角を検出する位相モノパルス方式のレーダ装置として構成した場合において、受信アンテナ間の距離が受信信号の波長を超えるようなときには虚像が検出されることがある。
【0097】
かかる場合に、画像認識結果を用いることで、上記のような虚像を判別することができる。その場合、かかる虚像の目標物体情報について車両制御装置100への出力優先度を低下させて、虚像に基づく車両1の誤制御の可能性を低下させることができる。
【0098】
図14は、第4の実施例における目標物体情報検出手段14cの動作手順を説明するフローチャート図である。図14の手順は、図7の手順S14における1つのサブルーチンに対応する。
【0099】
目標物体情報検出手段14cは、図7の手順S12で連続性が確認された目標物体情報を対象に、画像認識装置50から取得した画像認識結果に基づき算出した方位角が対応するかを確認する(S70)。そして、目標物体情報の相対速度、相対距離から、衝突予測時間を計算する(S72)。そして、目標物体情報を、衝突予測時間が小さい順にソートする(S74)。ここにおいて、衝突予測時間が短いほど車両制御上重要な目標物体であるので、車両制御上の優先順に目標物体情報がソートされる。
【0100】
そして、目標物体方法検出手段14cは、衝突予測時間が同じ目標物体情報が存在する場合に(S76のYES)、手順S70で方位角が対応づけられた目標物体情報の優先順位を繰り上げる(S78)。
【0101】
このような手順によれば、車両制御上重要度の高い目標物体情報から順に車両制御装置100に出力する際に、車両制御装置100側の処理能力の限界に応じて目標物体情報の数に上限を設けることで、虚像に基づく目標物体情報を出力する可能性を低下させることができる。
【0102】
よって、車両1の誤制御の可能性を低下させることができる。
【0103】
[第5の実施例]
目標物体としての他車両が路側のガードレールの付近や、路面上方の高架などの下を通過するときには、一時的に目標物体の相対距離とガードレールや高架などの設置物の相対距離が近似する。そのようなときには、他車両などの目標物体から得られたアップピーク信号グループまたはダウンピーク信号グループのいずれかが、路側のガードレールや、路面上方の高架などの設置物からのピーク信号とビート周波数が近似することにより、これらに埋もれてしまうことがある。かかる場合には、車両の制御上必要な他車両についての目標物体情報が検出されないおそれがある。第5の実施例では、画像認識結果を用いてかかる事態を回避する。
【0104】
画像認識装置50は、画像認識部54内のメモリにガードレールや高架などのエッジ形状パターンを予め格納しておくことで、これらを画像認識することができる。あるいは、レーダ装置10側の信号処理装置14内のメモリにガードレールや高架などのエッジ形状パターンを予め格納しておき、グループ検出手段14bが設置物であることを判断してもよい。
【0105】
そして、かかる画像認識結果が得られたときには、グループ検出手段14bは、設置物からのピーク信号に埋もれたピーク信号グループの方位角を推定する処理を行う。具体的には、アップピーク信号とダウンピーク信号とではアップビート周波数とダウンビート周波数が異なるので、いずれかのピーク信号グループが埋もれた場合であっても、他方のピーク信号グループが検出される場合がある。かかる場合に、埋もれていないピーク信号グループの方位角から埋もれたピーク信号グループの方位角を推定する。さらに、埋もれていないピーク信号グループのビート周波数と、過去に検出された相対速度、相対距離とから、上述の式(1)、(2)を用いて、埋もれたピーク信号グループのビート周波数を推定する。
【0106】
図15は、第5の実施例におけるグループ検出手段14bの動作手順を説明するフローチャート図である。図15の手順は、図7に示した手順S6を代替する手順である。
【0107】
まず、グループ検出手段14bは、画像認識結果に基づき設置物の距離を算出する(S80)。この場合、ガードレールや高架などの設置物は、そのエッジ形状が撮影画像内で占める面積から距離を算出することができる。そして、グループ検出手段14bは、図7の手順S6に示したグルーピング処理を実行する(S81)。
【0108】
次に、グループ検出手段14bは、アップ/ダウンピーク信号グループのいずれかが検出されていないかを判断する(S82)。たとえば、ピーク信号グループの数が一致しなければ、「YES」と判断する。その場合に、画像認識結果に基づく設置物の距離と、過去に検出された目標物体の相対距離から予測される相対距離とが一致するかを確認する(S84)。結果が「YES」の場合には、目標物体のピーク信号グループが設置物のピーク信号に埋もれていると判断し、埋もれていないピーク信号グループから埋もれているピーク信号グループの方位角、ビート周波数を推定する(S86)。
【0109】
このような手順によれば、推定されたピーク信号グループを用いてペアリング処理を実行することができるので、目標物体の検出もれを防止できる。
【0110】
[第6の実施例]
上述した第1の実施例では、反射断面積が方位角方向に広い目標物体、たとえば、大型の荷台を備えたトラックなどから複数のピーク信号グループが検出される場合に、単一の代表ピーク信号グループを検出する手順を示した。大型のトラックなどでは、このような場合のほかに、車両後方の荷台と、車両前方の運転席などからの反射信号が得られ、それぞれがピーク信号グループを形成する場合がある。かかる場合に、大型車だと車両長が数メートル以上に及ぶため、反射点までの相対距離に差が生じ、したがって複数のピーク信号グループのビート周波数に差が生じる。このため、ビート周波数が一致または近似する複数のピーク信号グループを対象とする第1の実施例では処理することができない。
【0111】
そこで第6の実施例では、目標物体情報検出手段14cは、図7で示したメイン手順における出力判定(手順S14)を行う際、画像認識結果から車両長を推定し、車両長に基づく相対距離差を有する複数の目標物体情報があるときには、複数の目標物体情報を出力する代わりにより相対距離が近い方を出力する。そうすることにより、車両制御上重要度の高い目標物体情報を出力することができ、車両制御上の誤動作を防止できる。
【0112】
図16は、第6の実施例における目標物体情報検出手段14cの動作手順を説明するフローチャート図である。図16の手順は、図7の手順S14における1つのサブルーチンに対応する。
【0113】
目標物体情報検出手段14cは、まず、画像認識装置50から取得した形状パターンから、車両長を推定する(S170)。この場合、形状パターンと車両長とを対応づけたマップデータをマイクロコンピュータのROMに格納しておき、これを参照する。例えば、乗用車の形状パターンの場合には車両長を5メートル、大型トラックの形状パターンの場合には、車両長を8メートルとして推定する。
【0114】
そして、図7の手順S12で連続性が確認された目標物体情報から、算出した車両長に対応する相対距離差を有する目標物体情報のペアを抽出する(S172)。そして、抽出したペアのうち、相対距離が大きい方を削除する(S174)。
【0115】
このような手順によれば、車両制御上重要度の高い目標物体情報を出力することができ、車両制御上の誤動作を防止できる。
【0116】
上述において、アップ/ダウンピーク信号の別を特定せずに、個々のピーク信号グループが目標物体ごとに検出されたか否かを判断する方法を説明した。かかる判断処理をアップ/ダウンピーク信号の両方において行う場合に、アップ/ダウンピーク信号グループの両方で同じ判断結果、つまり、複数のピーク信号グループが単一の目標物体に対応していたり、単一のピーク信号グループが複数の目標物体に対応していたりという判断結果が得られるときには、アップ/ダウンピーク信号グループの両方で上述した処理を行うことで、目標物体情報の誤検出や検出もれを回避できる。また、アップ/ダウンピーク信号グループのいずれかのみで複数のピーク信号グループが単一の目標物体に対応していたり、単一のピーク信号グループが複数の目標物体に対応していたりという判断結果が得られるときには、そのピーク信号グループに対し上述した処理を行うことにより、正確なペアリング処理が可能となる。よって、目標物体情報の誤検出や検出もれを回避できる。
【0117】
なお、上述の説明では、車両の前方監視用レーダ装置を例としたが、車両の前側方や後方監視レーダ装置にも本実施形態が適用できる。
【0118】
以上説明したとおり、本実施形態によれば、個々のピーク信号グループが目標物体ごとに検出されたか否かを判断し、目標物体の誤検出や検出もれを回避できる。
【図面の簡単な説明】
【0119】
【図1】本実施形態におけるレーダ装置の使用状況を説明する図である。
【図2】レーダ装置10を中心とする上記車両制御システムの概略構成を説明する図である。
【図3】レーダ送受信機10aの送信動作について説明する図である。
【図4】送信信号と受信信号との対応関係を説明する図である。
【図5】方位角θごとのピーク信号について説明する図である。
【図6】アップ/ダウンピーク信号グループについて説明する図である。
【図7】本実施形態における信号処理装置14の動作手順を説明するフローチャート図である。
【図8】画像認識結果から導出される目標物体の方位角について説明する図である。
【図9】第1の実施例におけるグループ検出手段14bの判断方法を説明する図である。
【図10】第1の実施例におけるグループ検出手段14bの動作手順を説明するフローチャート図である。
【図11】第2の実施例におけるグループ検出手段14bの判断方法を説明する図である。
【図12】第2の実施例におけるグループ検出手段14bの動作手順を説明するフローチャート図である。
【図13】第3の実施例におけるグループ検出手段14bの動作手順を説明するフローチャート図である。
【図14】第4の実施例における目標物体情報検出手段14cの動作手順を説明するフローチャート図である。
【図15】第5の実施例におけるグループ検出手段14bの動作手順を説明するフローチャート図である。
【図16】第6の実施例における目標物体情報検出手段14cの動作手順を説明するフローチャート図である。
【符号の説明】
【0120】
1:車両、10:レーダ装置、10a:レーダ送受信機、14:信号処理装置、14a:ピーク信号検出手段、14b:グループ検出手段、14c:目標物体情報検出手段、100:車両制御装置
【特許請求の範囲】
【請求項1】
周波数変調したレーダ信号を探索領域内の方位角ごとに送受信し、送受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置において、
前記方位角ごとに前記ビート信号の周波数スペクトルにおけるピーク信号を検出するピーク信号検出手段と、
複数の方位角で周波数が一致または近似し、かつ極大値を形成するピーク信号グループを検出するグループ検出手段と、
前記ピーク信号グループに基づき相対距離を含む目標物体情報を検出する目標物体情報検出手段とを有し、
前記グループ検出手段は、前記探索領域の画像認識結果に基づき導出された単一の目標物体の方位角に複数のピーク信号グループの方位角が対応する場合には、当該複数のピーク信号グループを代表するピーク信号グループを検出することを特徴とする信号処理装置。
【請求項2】
周波数変調したレーダ信号を探索領域内の方位角ごとに送受信し、送受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置において、
前記方位角ごとに前記ビート信号の周波数スペクトルにおけるピーク信号を検出するピーク信号検出手段と、
複数の方位角で周波数が一致または近似し、かつ極大値を形成するピーク信号グループを検出するグループ検出手段と、
前記ピーク信号グループに基づき相対距離を含む目標物体情報を検出する目標物体情報検出手段とを有し、
前記グループ検出手段は、前記探索領域の画像認識結果に基づき導出された複数の目標物体の方位角に単一のピーク信号グループの方位角が対応する場合には、当該ピーク信号グループを前記複数の目標物体の方位角にそれぞれ対応する複数のピーク信号グループに分離することを特徴とする信号処理装置。
【請求項3】
請求項1または2において、
前記グループ検出手段は、前記画像認識結果に基づき導出された目標物体の第1の相対距離と前記目標物体情報検出手段が検出した前記目標物体の第2の相対距離とが所定の誤差範囲内で一致するときには、前記画像認識結果と前記第2の相対距離に基づき前記目標物体の方位角を導出することを特徴とする信号処理装置。
【請求項4】
請求項1乃至3のいずれかにおいて、
前記目標物体情報検出手段は、前記検出した目標物体情報を他の制御装置に出力するときに、当該目標物体情報が前記探索領域の画像認識結果に対応するかを確認することを特徴とする信号処理装置。
【請求項5】
請求項1乃至4に記載のレーダ送受信機と信号処理装置とを備えたレーダ装置。
【請求項1】
周波数変調したレーダ信号を探索領域内の方位角ごとに送受信し、送受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置において、
前記方位角ごとに前記ビート信号の周波数スペクトルにおけるピーク信号を検出するピーク信号検出手段と、
複数の方位角で周波数が一致または近似し、かつ極大値を形成するピーク信号グループを検出するグループ検出手段と、
前記ピーク信号グループに基づき相対距離を含む目標物体情報を検出する目標物体情報検出手段とを有し、
前記グループ検出手段は、前記探索領域の画像認識結果に基づき導出された単一の目標物体の方位角に複数のピーク信号グループの方位角が対応する場合には、当該複数のピーク信号グループを代表するピーク信号グループを検出することを特徴とする信号処理装置。
【請求項2】
周波数変調したレーダ信号を探索領域内の方位角ごとに送受信し、送受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置において、
前記方位角ごとに前記ビート信号の周波数スペクトルにおけるピーク信号を検出するピーク信号検出手段と、
複数の方位角で周波数が一致または近似し、かつ極大値を形成するピーク信号グループを検出するグループ検出手段と、
前記ピーク信号グループに基づき相対距離を含む目標物体情報を検出する目標物体情報検出手段とを有し、
前記グループ検出手段は、前記探索領域の画像認識結果に基づき導出された複数の目標物体の方位角に単一のピーク信号グループの方位角が対応する場合には、当該ピーク信号グループを前記複数の目標物体の方位角にそれぞれ対応する複数のピーク信号グループに分離することを特徴とする信号処理装置。
【請求項3】
請求項1または2において、
前記グループ検出手段は、前記画像認識結果に基づき導出された目標物体の第1の相対距離と前記目標物体情報検出手段が検出した前記目標物体の第2の相対距離とが所定の誤差範囲内で一致するときには、前記画像認識結果と前記第2の相対距離に基づき前記目標物体の方位角を導出することを特徴とする信号処理装置。
【請求項4】
請求項1乃至3のいずれかにおいて、
前記目標物体情報検出手段は、前記検出した目標物体情報を他の制御装置に出力するときに、当該目標物体情報が前記探索領域の画像認識結果に対応するかを確認することを特徴とする信号処理装置。
【請求項5】
請求項1乃至4に記載のレーダ送受信機と信号処理装置とを備えたレーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2010−151621(P2010−151621A)
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願番号】特願2008−330214(P2008−330214)
【出願日】平成20年12月25日(2008.12.25)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願日】平成20年12月25日(2008.12.25)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]