
信号処理装置、撮像装置および信号処理プログラム

【課題】 非定常音を効率的に除去することができる技術を提供することを目的とする。
【解決手段】 録音した音声信号の周波数特性から取得した複数の特徴量からなる第1の特徴量データを生成する解析部と、撮像装置の駆動音信号の周波数特性から取得した複数の特徴量からなる第2の特徴量データを記憶する記憶部と、第1の特徴量データおよび第2の特徴量データを用いて内積の演算を行う演算部と、内積の値に基づいて音声信号に駆動音信号が重畳しているか否かを判定する判定部と、を備える。
【解決手段】 録音した音声信号の周波数特性から取得した複数の特徴量からなる第1の特徴量データを生成する解析部と、撮像装置の駆動音信号の周波数特性から取得した複数の特徴量からなる第2の特徴量データを記憶する記憶部と、第1の特徴量データおよび第2の特徴量データを用いて内積の演算を行う演算部と、内積の値に基づいて音声信号に駆動音信号が重畳しているか否かを判定する判定部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、非定常音を除去することができる信号処理装置、撮像装置および信号処理プログラムに関する。
【背景技術】
【0002】
従来、デジタルカメラやデジタルビデオカメラ等による音声記録や動画撮像において、周囲の音声だけでなく、デジタルカメラやデジタルビデオカメラ自身が発する駆動音のような非定常音まで記録される。そこで、そうした非定常音を除去して、必要な音声のみを記録する様々な技術が開発されている。
【0003】
例えば、特許文献1は、予め撮影動作に伴って発生する機械音をスペクトル化したスペクトル信号を記憶手段に記憶し、撮影中に機械音の発生タイミングに基づいて、入力音声信号のスペクトル信号から所定の係数を乗じた機械音のスペクトル信号を減算することにより、機械音を除去する技術を開示している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−279185号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1のような従来技術では、駆動音の発生タイミングが、モータ等を駆動させる操作信号等に基づいて決定されるが、その操作信号等と実際の駆動音の発生タイミングとは必ずしも一致しないことから、完全に駆動音を除去することはできない。
【0006】
上記従来技術が有する問題に鑑み、本発明の目的は、非定常音を効率的に除去することができる技術を提供することにある。
【課題を解決するための手段】
【0007】
上記従来技術が有する問題を解決するために、本発明の信号処理装置は、録音した音声信号の周波数特性から取得した複数の特徴量からなる第1の特徴量データを生成する解析部と、撮像装置の駆動音信号の周波数特性から取得した複数の特徴量からなる第2の特徴量データを記憶する記憶部と、第1の特徴量データおよび第2の特徴量データを用いて内積の演算を行う演算部と、内積の値に基づいて音声信号に駆動音信号が重畳しているか否かを判定する判定部と、を備える。
【0008】
また、第1の特徴量データおよび第2の特徴量データを正規化する正規化部を備え、演算部は、正規化された第1の特徴量データおよび第2の特徴量データを用いて内積の演算を行ってもよい。
【0009】
また、判定部により音声信号に駆動音信号が重畳していると判定された場合、第1の特徴量データおよび第2の特徴量データを用いて音声信号から駆動音信号が除去された特徴量データを生成する除去部を備えてもよい。
【0010】
また、解析部は、音声信号を所定の時間間隔で解析して第1の特徴量データを生成してもよい。
【0011】
また、解析部は、所定の時間間隔の音声信号を複数の時間区分に分割し、複数の時間区分毎に周波数特性から特徴量を取得し、複数の時間区分で取得した複数の特徴量のうち最小、最大または平均の値を求めて第1の特徴量データを生成してもよい。
【0012】
また、記憶部は、駆動音信号を所定の時間間隔毎に解析して求まる複数の第2の特徴量データを記憶してもよい。
【0013】
また、第2の特徴量データの複数の特徴量のそれぞれは、所定の時間間隔の駆動音信号を複数の時間区分に分割し、複数の時間区分毎に周波数特性から特徴量を取得し、複数の時間区分で取得した複数の特徴量のうち最小、最大または平均の値であってもよい。
【0014】
また、第2の特徴量データは、駆動音信号から背景ノイズ信号が除去された信号の周波数特性から取得した複数の特徴量であってもよい。
【0015】
また、除去部により音声信号から駆動音信号が除去された特徴量データを逆変換して音声信号を出力する逆変換部を備え、解析部は、音声信号の周波数特性から取得した複数の特徴量それぞれに対応した位相情報を出力する位相出力部をさらに備え、逆変換部は、位相情報に基づいて逆変換してもよい。
【0016】
本発明の撮像装置は、被写体像を撮像して画像を生成する撮像部と、外部からの音声を音声信号として出力するマイクロホンと、本発明の信号処理装置と、を備える。
【0017】
本発明の信号処理プログラムは、コンピュータを本発明の信号処理装置として機能させる。
【発明の効果】
【0018】
本発明によれば、非定常音を効率的に除去することができる。
【図面の簡単な説明】
【0019】
【図1】一の実施形態に係るデジタルカメラ1の構成の一例を示すブロック図
【図2】デジタルカメラ1がAF制御動作時に発する駆動音信号の時間変化を示す図
【図3】デジタルカメラ1による駆動音の除去処理動作を示す流れ図
【図4】内積値eS×eNAおよび音声信号の時間変化を示す図
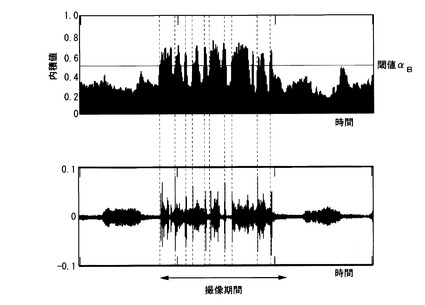
【図5】内積値eS×eNBおよび音声信号の時間変化を示す図
【発明を実施するための形態】
【0020】
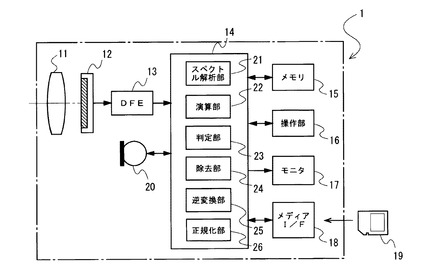
図1は、一の実施形態に係るデジタルカメラ1の構成の一例を示すブロック図である。
【0021】
本実施形態のデジタルカメラ1は、撮像光学系11、撮像素子12、DFE13、CPU14、メモリ15、操作部ン16、モニタ17、メディアI/F18およびマイクロホ20を有する。ここで、DFE13、メモリ15、操作部16、モニタ17、メディアI/F18およびマイクロホン20は、それぞれCPU14に接続されている。
【0022】
撮像素子12は、撮像光学系11を通過した光束による被写体の結像を撮像するデバイスである。この撮像素子12の出力はDFE13に接続されている。なお、本実施形態の撮像素子12は、順次走査方式の固体撮像素子(CCDなど)であってもよく、XYアドレス方式の固体撮像素子(CMOSなど)であってもよい。
【0023】
撮像素子12の受光面には、複数の受光素子がマトリックス状に配列されている。撮像素子12の各受光素子には、赤色(R)、緑色(G)、青色(B)のカラーフィルタが公知のベイヤ配列にしたがって配置されている。そのため、撮像素子12の各受光素子は、カラーフィルタでの色分解によってそれぞれの色に対応する画像信号を出力する。これにより、撮像素子12は、撮像時にカラーの画像を取得できる。撮像素子12は、全受光素子に画像信号を出力させて静止画像等を撮像し、間引いた一部の受光素子に画像信号を出力させて動画や構図確認用の低解像画像(スルー画)等を撮像する。
【0024】
DFE13は、撮像素子12から入力される画像信号のA/D変換や、欠陥画素補正などの信号処理を行うデジタルフロントエンド回路である。このDFE13は、本実施形態において撮像素子12とともに撮像部を構成し、撮像素子12より入力される画像信号を画像のデータとしてCPU14に出力する。
【0025】
CPU14は、デジタルカメラ1の各部を統括的に制御するプロセッサである。例えば、CPU14は、撮像素子12の出力に基づいて、公知のコントラスト検出によるオートフォーカス(AF)制御や公知の自動露出(AE)演算などをそれぞれ実行する。また、CPU14は、DEF13からの画像データに対して、デジタル処理を施す。一例として、デジタル処理には、補間処理、ホワイトバランス処理、階調変換処理、輪郭強調処理、色変換処理などが含まれる。さらに、CPU14は、プログラムの実行により、スペクトル解析部21、演算部22、判定部23、除去部24、逆変換部25、正規化部26として動作する。
【0026】
スペクトル解析部21は、デジタルカメラ1による動画等の撮像時において、後述するマイクロホン20によって取得される周囲の音声の時系列信号をスペクトル解析する。本実施形態のスペクトル解析は、高速フーリエ変換、Z変換、または離散コサイン変換等の公知の手法を用いて行われる。スペクトル解析部21は、そのスペクトル解析から求めた音声信号の周波数スペクトルの複数の特徴量、すなわち複数の周波数成分の振幅をベクトルの成分とする特徴ベクトルVSを生成する。また、スペクトル解析部21は、特徴ベクトルVSの各成分、すなわち各周波数成分の振幅に対応した位相も求める。スペクトル解析部21は、求めた位相を位相情報として逆変換部25に出力する不図示の位相出力部を有する。
【0027】
また、本実施形態では、CPU14が、デジタルカメラ1による撮像を行う前に、周囲の音声が無い無音状態で、ユーザにより操作部16の操作(例えば、レリーズ釦の半押し操作等)に応じて、マイクロホン20を介しデジタルカメラ1が発する駆動音の時系列信号を取得する。スペクトル解析部21は、取得した駆動音信号をスペクトル解析して、特徴ベクトルVNを生成する。スペクトル解析部21は、その特徴ベクトルVNをメモリ15に記録する。なお、駆動音は、AF制御や撮像光学系11のズーミング動作に伴って発せられる非定常音であり、あるいはユーザによる手動フォーカス動作や操作部16の操作(例えば釦操作やダイヤル操作等)に伴って発せられる非定常音である。
【0028】
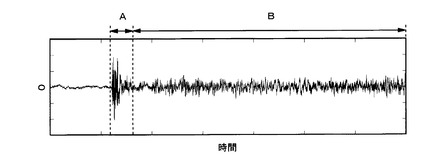
図2は、デジタルカメラ1が発する駆動音の一例として、マイクロホン20が取得したAF制御動作時の駆動音信号の時間変化を示す。図2に示すように、AF制御動作時の駆動音は、一般的に大きく2つの区間、撮像光学系11が不図示のレンズ駆動部によって停止状態から定常の駆動動作になるまでの区間Aと、定常の駆動動作の区間Bとに分けられる。そこで、本実施形態において、スペクトル解析部21は、区間AおよびBの駆動音信号をスペクトル解析し、特徴ベクトルVNAおよびVNBをそれぞれ生成してメモリ15に記録するものとする。これにより、音声信号に駆動音信号が重畳した箇所を正確に特定することが可能となる。
【0029】
なお、駆動音信号の特徴ベクトルVNは、一度求められたら他の撮像において何度も用いられてもよいし、撮像を行う度に駆動音を取得して更新されてもよい。また、スペクトル解析部21は、区間Aおよび区間Bだけでなく、定常の駆動動作から停止状態になるまでの区間の特徴ベクトルVNをも生成しメモリ15に記憶してもよい。
【0030】
演算部22は、正規化部26で正規化された特徴ベクトルVSおよびVNの単位特徴ベクトルeSおよびeNによる内積値を求める。
【0031】
判定部23は、演算部22が求めた内積値と閾値αとの比較に基づいて、マイクロホン20が取得した音声信号に駆動音信号が重畳しているか否かを判定する。ここで、内積値は0から1までの値であり、内積値が大きな値ほど音声信号に駆動音信号が重畳していることを示す。具体的には、内積値=0の場合、音声信号に駆動音信号が重畳していないことを示し、内積値=1の場合、音声信号=駆動音信号であることを示す。
【0032】
除去部24は、判定部23によって音声信号に駆動音信号が重畳していると判定された場合、音声信号の特徴ベクトルVS、駆動音信号の特徴ベクトルVNおよび閾値αを用いて、音声信号から重畳する駆動音信号が除去された特徴ベクトルV’Sを出力する。
【0033】
逆変換部25は、スペクトル解析部21の位相出力部(不図示)からの位相情報を用いて、除去部24によって駆動音信号が除去された特徴ベクトルV’Sから音声信号に逆変換する。
【0034】
メモリ15は、CPU14によって実行される各種のプログラムや画像ファイルなどとともに、上記駆動音信号の特徴ベクトルVNおよび閾値αを記憶する不揮発性のフラッシュメモリである。
【0035】
操作部16は、例えば、記録モードの切換入力や、後述する記憶媒体19への記録を伴う静止画や動画の撮像指示等をユーザから受け付ける。
【0036】
モニタ17は、液晶モニタ等のモニタであり、CPU14の制御によって各種画像を表示する。例えば、動画の撮像後において、CPU14の制御指示に応じて、モニタ17は、撮像された動画を再生表示する。また、本実施形態のモニタ17は、演算部22の生成した情報等を表示する。
【0037】
メディアI/F18には、不揮発性の記憶媒体19を着脱可能に接続できる。そして、メディアI/F18は、記憶媒体19に対してデータの書き込み/読み込みを実行する。上記の記憶媒体19は、ハードディスクや、半導体メモリを内蔵したメモリカードなどで構成される。なお、図1では記憶媒体19の一例としてメモリカードを図示する。
【0038】
マイクロホン20は、周囲の音声だけでなく、デジタルカメラ1が発する駆動音を受信して音声信号や駆動音信号の電気信号を出力する。また、マイクロホン20は、動画再生時等の場合、記録された音声信号を音波として出力するスピーカとして動作する。
【0039】
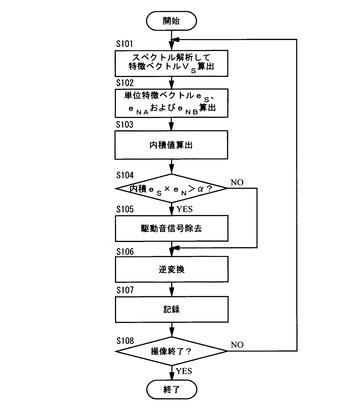
次に、図3の流れ図を参照しつつ、本実施形態のデジタルカメラ1による駆動音信号の除去処理動作について説明する。なお、除去対象となる装置はデジタルカメラ1自身とする。また、以下の説明では、駆動音信号としてAF制御動作時の駆動音とし、メモリ15には、特徴ベクトルVNAおよびVNBが記憶されているとする。
【0040】
具体的には、CPU14が、ユーザからの動画撮像指示(例えば、操作部16に含まれるレリーズ釦の全押し操作など)を受け付ける。CPU14は、撮像素子12に間引いた一部の受光素子から画像信号を出力させて被写体の動画撮像を開始する。同時に、CPU14は、マイクロホン20に被写体およびその周囲の音声を取得させ音声信号を出力させる。CPU14は、ステップS101〜ステップS108の処理を開始する。
【0041】
ステップS101:スペクトル解析部21は、マイクロホン20から出力される音声信号を、所定の時間間隔(例えば10m秒等)で所定の窓関数を適用して高速フーリエ変換、Z変換、または離散コサイン変換等の公知の手法を用いスペクトル解析する。スペクトル解析部21は、そのスペクトル解析によって求まる音声信号の周波数スペクトルから特徴ベクトルVSを生成する。また、スペクトル解析部21は、特徴ベクトルVSの各周波数成分の位相も求めて、逆変換部25へ出力する。
【0042】
ステップS102:演算部22は、メモリ15から駆動音信号の特徴ベクトルVNAおよびVNBを読み込む。正規化部26は、音声信号の特徴ベクトルVS、駆動音信号の特徴ベクトルVNAおよびVNBを正規化して、単位ベクトルeS、eNAおよびeNBを求める。
【0043】
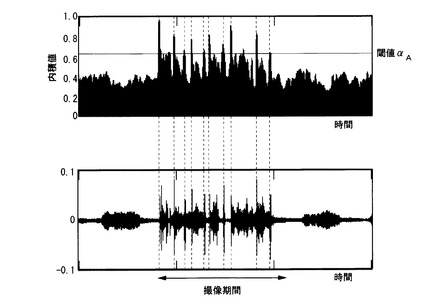
ステップS103:演算部22は、単位ベクトルeSとeNAとの内積値eS×eNA、および単位ベクトルeSとeNBとの内積値eS×eNBをそれぞれ求める。図4は、内積値eS×eNA(上図)および音声信号(下図)の時間変化を示したものである。また、図5は、内積値eS×eNB(上図)および音声信号(下図)の時間変化を示したものである。なお、図4および5に示す点線は、撮像期間に、AF制御動作に伴う駆動音のうち区間Aの開始位置を示す。また、本実施形態における音声信号は、例えば、被写体として風景を動画撮像している場合で、マイクロホン20が、AF制御動作に伴う駆動音とともに周囲からセミの声を取得するものとする。図4および図5に示すように、区間Aの開始位置と内積値eS×eNAとがよく一致し、区間Bが区間Aの後に続いている。
【0044】
ステップS104:判定部23は、求めた内積値eS×eNAと閾値αAおよび内積値eS×eNBと閾値αBとの比較を行い、音声信号に区間Aの駆動音信号または区間Bの駆動音信号が音声信号に重畳しているか否かを判定する。なお、閾値αAおよびαBの各々は、動画撮像前に、ユーザによる操作部16の操作に基づいて、撮像状況に応じて予め設定されることが好ましい。本実施形態における閾値αAおよびαBは、例えば、0.65および0.5に設定されている(図4および図5)。
【0045】
判定部23は、内積値eS×eNAが閾値αAより大きい場合、音声信号に区間Aの駆動音信号が重畳していると判定して、ステップS105(YES側)へ移行する。一方、内積値eS×eNAが閾値αA以下の場合、判定部23は、音声信号に区間Aの駆動音信号が重畳していないと判定して、ステップS106(NO側)へ移行する。
【0046】
同様に、判定部23は、内積値eS×eNBが閾値αBより大きい場合、音声信号に区間Bの駆動音信号が重畳していると判定して、ステップS105(YES側)へ移行する。一方、内積値eS×eNBが閾値αB以下の場合、判定部23は、音声信号に区間Bの駆動音信号が重畳していないと判定して、ステップS106(NO側)へ移行する。
【0047】
ステップS105:除去部24は、内積値eS×eNAが閾値αAより大きい場合、音声信号の特徴ベクトルVSから区間Aの駆動音信号の特徴ベクトルVNAを閾値αAに応じて減算して、音声信号から区間Aの駆動音信号が除去された特徴ベクトルV’Sを出力する。
【0048】
一方、内積値eS×eNBが閾値αBより大きい場合、除去部24は、音声信号の特徴ベクトルVSから区間Bの駆動音の信号の特徴ベクトルVNBを閾値αBに応じて減算して、音声信号から区間Bの駆動音信号が除去された特徴ベクトルV’Sを出力する。
【0049】
ステップS106:逆変換部25は、スペクトル解析部21の位相出力部(不図示)からの位相情報を用いて、ステップS104の特徴ベクトルVS、または、ステップS105で駆動音信号が除去された特徴ベクトルV’Sを音声信号に逆変換する。
【0050】
ステップS107:CPU14は、Audio Video Interleave(AVI)やMotion JPEG等の所定の動画形式に応じて、画像データとステップS106で逆変換された音声信号とを動画データとしてメモリ15に一時的に記録する。
【0051】
ステップS108:CPU14は、ユーザによるレリーズ釦の全押しが解除されたか否かを判定する。CPU14は、レリーズ釦の全押しが解除されたと判定した場合(YES側)、メモリ15に一時的に記録された動画データのファイルを生成して、メモリ15や記憶媒体19に記録する。CPU14は、一連の処理を終了する。一方、CPU14は、レリーズ釦の全押しが解除されていないと判定した場合、ステップS101(NO側)へ移行する。CPU14は、ステップS101〜ステップS107の処理を、レリーズ釦の全押しが解除されるまで行う。
【0052】
このように、本実施形態は、レンズ駆動部(不図示)等を駆動させる操作信号等ではなく、音声信号の単位ベクトルeSと駆動音信号の単位ベクトルeNとの内積値eS×eNに基づいて、音声信号に駆動音信号が重畳した箇所を特定することにより、確度高く駆動音信号を除去することができる。
《実施形態の補足事項》
(1)本発明の信号処理装置は、上記実施形態のデジタルカメラ1の例に限定されない。例えば、コンピュータを本発明の信号処理装置として機能させてもよい。
【0053】
(2)上記実施形態では、デジタルカメラ1のスペクトル解析部21、演算部22、判定部23、除去部24、逆変換部25、正規化部26の各処理を、CPU14がソフトウエア的に実現する例を説明したが、ASICを用いてこれらの各処理をハードウエア的に実現しても勿論かまわない。
【0054】
(3)上記実施形態では、メモリ15は駆動音信号の特徴ベクトルVNAおよびVNBを記憶したが、メモリ15は特徴ベクトルVNAのみを記憶してもよい。すなわち、区間Bの駆動音信号は、区間Aの駆動音信号の後に続くことから、判定部23が区間Aの駆動音信号が重畳していると判定した箇所に基づいて、区間Bの駆動音信号の箇所を推定してもよい。
【0055】
(4)上記実施形態では、デジタルカメラ1による動画撮像で取得された音声信号に重畳した駆動音信号を除去したが、静止画像に付加される音声信号に対する駆動音信号の除去処理についても適用可能である。
【0056】
また、デジタルカメラ1が撮像した動画再生時に、重畳した駆動音信号の除去処理に対しても適用可能である。この場合、モニタ17が、CPU14からの制御指示に応じて、図4や図5の上図に示すような内積値eS×eNの時間変化等のグラフや、駆動音信号が重畳しているか否かの判断部23による判定結果を、動画とともに表示することが好ましい。さらに、モニタ17が内積値eS×eNの時間変化等のグラフを表示する場合、CPU14が、モニタ17の前面に配置された操作部16のタッチパネル等を介して、ユーザからの駆動音信号を除去する期間等の指示を受け付けられることが好ましい。
【0057】
(5)上記実施形態では、デジタルカメラ1が発する駆動音信号をスペクトル解析して求めた特徴ベクトルVNをメモリ15に記憶したが、次のようにしてもよい。例えば、CPU14は、デジタルカメラ1による撮像を行う前で、且つ周囲の音声や駆動音が無い無音状態で、マイクロホン20自身が有するホワイトノイズ等の背景ノイズを取得して、メモリ15に記憶する。CPU14は、スペクトル減算法等の公知の手法を用いて駆動音信号に含まれる背景ノイズを除去する。スペクトル解析部21は、背景ノイズが除去された駆動音信号をスペクトル解析して特徴ベクトルVNを生成しメモリ15に記憶してもよい。
【0058】
上記駆動音信号から背景ノイズを除去した後で特徴ベクトルVNを生成する理由は、次の通りである。駆動音に占める背景ノイズの割合が大きい場合、演算部22が音声信号の単位ベクトルeSと駆動音信号の単位ベクトルeNとの内積の演算を行うと、内積値eS×eNは、背景ノイズ同士の内積成分に引っ張られて全体的に大きな値になる。その結果、判定部23は、駆動音信号が重畳していない箇所であっても、駆動音信号が重畳していると判定してしまう。この判定部23による誤判定を回避するために、駆動音信号の特徴ベクトルVNを求める際に、駆動音信号から背景ノイズを除去する。これにより、音声信号の単位ベクトルeSと駆動音信号の単位ベクトルeNとの内積値eS×eNに基づいて、音声信号に駆動音信号が重畳した箇所をより正確に特定することができ、確度高く重畳した駆動音信号を除去することができる。
【0059】
(6)上記実施形態では、スペクトル解析部21が、所定の時間間隔毎の音声信号から特徴ベクトルVSを生成し、区間Aや区間Bの駆動音信号から特徴ベクトルVNAやVNBを生成したが、次のようにしてもよい。例えば、スペクトル解析部21は、特徴ベクトルVSを求めるにあたり、所定の時間間隔の音声信号を、さらに複数の時間区分に分割する。スペクトル解析部21は、各時間区分の音声信号をスペクトル解析し周波数スペクトルの複数の周波数成分の振幅を求める。スペクトル解析部21は、周波数成分毎に、各時間区分で求めた振幅のうち最小値、最大値または平均値をその周波数成分の振幅としてもよい。駆動音信号の特徴ベクトルVNについても同様である。
【0060】
これにより、例えば、各時間区分で求めた各周波数成分の振幅のうち最小値を選択して生成された駆動音信号の特徴ベクトルVNは、最小の振幅の値には駆動音信号のみの成分しかないものと見なすことができる。よって、上記背景ノイズを除去しなくても音声信号に駆動音の信号が重畳した箇所を正確に特定することができる。
【0061】
また、スペクトル解析部21は、上記各時間区分で駆動音信号の特徴ベクトルV’Nを求めて、それら複数の特徴ベクトルV’Nを時系列順に並べて特徴行列を生成する。スペクトル解析部21は、生成された特徴行列を非負値行列分解(NMF)等の手法を用いて分解することにより得られる1つあるいは複数の特徴ベクトルを駆動音信号の特徴ベクトルVNとして生成してもよい。
【0062】
以上の詳細な説明により、実施形態の特徴点および利点は明らかになるであろう。これは、特許請求の範囲が、その精神および権利範囲を逸脱しない範囲で前述のような実施形態の特徴点および利点にまで及ぶことを意図する。また、当該技術分野において通常の知識を有する者であれば、あらゆる改良および変更に容易に想到できるはずであり、発明性を有する実施形態の範囲を前述したものに限定する意図はなく、実施形態に開示された範囲に含まれる適当な改良物および均等物によることも可能である。
【符号の説明】
【0063】
1…デジタルカメラ、11…撮像光学系、12…撮像素子、13…DEF、14…CPU、15…メモリ、16…操作部、17…モニタ、18…メディアI/F、19…記憶媒体、20…マイクロホン、21…スペクトル解析部、22…演算部、23…判定部、24…除去部、25…逆変換部、26…正規化部
【技術分野】
【0001】
本発明は、非定常音を除去することができる信号処理装置、撮像装置および信号処理プログラムに関する。
【背景技術】
【0002】
従来、デジタルカメラやデジタルビデオカメラ等による音声記録や動画撮像において、周囲の音声だけでなく、デジタルカメラやデジタルビデオカメラ自身が発する駆動音のような非定常音まで記録される。そこで、そうした非定常音を除去して、必要な音声のみを記録する様々な技術が開発されている。
【0003】
例えば、特許文献1は、予め撮影動作に伴って発生する機械音をスペクトル化したスペクトル信号を記憶手段に記憶し、撮影中に機械音の発生タイミングに基づいて、入力音声信号のスペクトル信号から所定の係数を乗じた機械音のスペクトル信号を減算することにより、機械音を除去する技術を開示している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−279185号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1のような従来技術では、駆動音の発生タイミングが、モータ等を駆動させる操作信号等に基づいて決定されるが、その操作信号等と実際の駆動音の発生タイミングとは必ずしも一致しないことから、完全に駆動音を除去することはできない。
【0006】
上記従来技術が有する問題に鑑み、本発明の目的は、非定常音を効率的に除去することができる技術を提供することにある。
【課題を解決するための手段】
【0007】
上記従来技術が有する問題を解決するために、本発明の信号処理装置は、録音した音声信号の周波数特性から取得した複数の特徴量からなる第1の特徴量データを生成する解析部と、撮像装置の駆動音信号の周波数特性から取得した複数の特徴量からなる第2の特徴量データを記憶する記憶部と、第1の特徴量データおよび第2の特徴量データを用いて内積の演算を行う演算部と、内積の値に基づいて音声信号に駆動音信号が重畳しているか否かを判定する判定部と、を備える。
【0008】
また、第1の特徴量データおよび第2の特徴量データを正規化する正規化部を備え、演算部は、正規化された第1の特徴量データおよび第2の特徴量データを用いて内積の演算を行ってもよい。
【0009】
また、判定部により音声信号に駆動音信号が重畳していると判定された場合、第1の特徴量データおよび第2の特徴量データを用いて音声信号から駆動音信号が除去された特徴量データを生成する除去部を備えてもよい。
【0010】
また、解析部は、音声信号を所定の時間間隔で解析して第1の特徴量データを生成してもよい。
【0011】
また、解析部は、所定の時間間隔の音声信号を複数の時間区分に分割し、複数の時間区分毎に周波数特性から特徴量を取得し、複数の時間区分で取得した複数の特徴量のうち最小、最大または平均の値を求めて第1の特徴量データを生成してもよい。
【0012】
また、記憶部は、駆動音信号を所定の時間間隔毎に解析して求まる複数の第2の特徴量データを記憶してもよい。
【0013】
また、第2の特徴量データの複数の特徴量のそれぞれは、所定の時間間隔の駆動音信号を複数の時間区分に分割し、複数の時間区分毎に周波数特性から特徴量を取得し、複数の時間区分で取得した複数の特徴量のうち最小、最大または平均の値であってもよい。
【0014】
また、第2の特徴量データは、駆動音信号から背景ノイズ信号が除去された信号の周波数特性から取得した複数の特徴量であってもよい。
【0015】
また、除去部により音声信号から駆動音信号が除去された特徴量データを逆変換して音声信号を出力する逆変換部を備え、解析部は、音声信号の周波数特性から取得した複数の特徴量それぞれに対応した位相情報を出力する位相出力部をさらに備え、逆変換部は、位相情報に基づいて逆変換してもよい。
【0016】
本発明の撮像装置は、被写体像を撮像して画像を生成する撮像部と、外部からの音声を音声信号として出力するマイクロホンと、本発明の信号処理装置と、を備える。
【0017】
本発明の信号処理プログラムは、コンピュータを本発明の信号処理装置として機能させる。
【発明の効果】
【0018】
本発明によれば、非定常音を効率的に除去することができる。
【図面の簡単な説明】
【0019】
【図1】一の実施形態に係るデジタルカメラ1の構成の一例を示すブロック図
【図2】デジタルカメラ1がAF制御動作時に発する駆動音信号の時間変化を示す図
【図3】デジタルカメラ1による駆動音の除去処理動作を示す流れ図
【図4】内積値eS×eNAおよび音声信号の時間変化を示す図
【図5】内積値eS×eNBおよび音声信号の時間変化を示す図
【発明を実施するための形態】
【0020】
図1は、一の実施形態に係るデジタルカメラ1の構成の一例を示すブロック図である。
【0021】
本実施形態のデジタルカメラ1は、撮像光学系11、撮像素子12、DFE13、CPU14、メモリ15、操作部ン16、モニタ17、メディアI/F18およびマイクロホ20を有する。ここで、DFE13、メモリ15、操作部16、モニタ17、メディアI/F18およびマイクロホン20は、それぞれCPU14に接続されている。
【0022】
撮像素子12は、撮像光学系11を通過した光束による被写体の結像を撮像するデバイスである。この撮像素子12の出力はDFE13に接続されている。なお、本実施形態の撮像素子12は、順次走査方式の固体撮像素子(CCDなど)であってもよく、XYアドレス方式の固体撮像素子(CMOSなど)であってもよい。
【0023】
撮像素子12の受光面には、複数の受光素子がマトリックス状に配列されている。撮像素子12の各受光素子には、赤色(R)、緑色(G)、青色(B)のカラーフィルタが公知のベイヤ配列にしたがって配置されている。そのため、撮像素子12の各受光素子は、カラーフィルタでの色分解によってそれぞれの色に対応する画像信号を出力する。これにより、撮像素子12は、撮像時にカラーの画像を取得できる。撮像素子12は、全受光素子に画像信号を出力させて静止画像等を撮像し、間引いた一部の受光素子に画像信号を出力させて動画や構図確認用の低解像画像(スルー画)等を撮像する。
【0024】
DFE13は、撮像素子12から入力される画像信号のA/D変換や、欠陥画素補正などの信号処理を行うデジタルフロントエンド回路である。このDFE13は、本実施形態において撮像素子12とともに撮像部を構成し、撮像素子12より入力される画像信号を画像のデータとしてCPU14に出力する。
【0025】
CPU14は、デジタルカメラ1の各部を統括的に制御するプロセッサである。例えば、CPU14は、撮像素子12の出力に基づいて、公知のコントラスト検出によるオートフォーカス(AF)制御や公知の自動露出(AE)演算などをそれぞれ実行する。また、CPU14は、DEF13からの画像データに対して、デジタル処理を施す。一例として、デジタル処理には、補間処理、ホワイトバランス処理、階調変換処理、輪郭強調処理、色変換処理などが含まれる。さらに、CPU14は、プログラムの実行により、スペクトル解析部21、演算部22、判定部23、除去部24、逆変換部25、正規化部26として動作する。
【0026】
スペクトル解析部21は、デジタルカメラ1による動画等の撮像時において、後述するマイクロホン20によって取得される周囲の音声の時系列信号をスペクトル解析する。本実施形態のスペクトル解析は、高速フーリエ変換、Z変換、または離散コサイン変換等の公知の手法を用いて行われる。スペクトル解析部21は、そのスペクトル解析から求めた音声信号の周波数スペクトルの複数の特徴量、すなわち複数の周波数成分の振幅をベクトルの成分とする特徴ベクトルVSを生成する。また、スペクトル解析部21は、特徴ベクトルVSの各成分、すなわち各周波数成分の振幅に対応した位相も求める。スペクトル解析部21は、求めた位相を位相情報として逆変換部25に出力する不図示の位相出力部を有する。
【0027】
また、本実施形態では、CPU14が、デジタルカメラ1による撮像を行う前に、周囲の音声が無い無音状態で、ユーザにより操作部16の操作(例えば、レリーズ釦の半押し操作等)に応じて、マイクロホン20を介しデジタルカメラ1が発する駆動音の時系列信号を取得する。スペクトル解析部21は、取得した駆動音信号をスペクトル解析して、特徴ベクトルVNを生成する。スペクトル解析部21は、その特徴ベクトルVNをメモリ15に記録する。なお、駆動音は、AF制御や撮像光学系11のズーミング動作に伴って発せられる非定常音であり、あるいはユーザによる手動フォーカス動作や操作部16の操作(例えば釦操作やダイヤル操作等)に伴って発せられる非定常音である。
【0028】
図2は、デジタルカメラ1が発する駆動音の一例として、マイクロホン20が取得したAF制御動作時の駆動音信号の時間変化を示す。図2に示すように、AF制御動作時の駆動音は、一般的に大きく2つの区間、撮像光学系11が不図示のレンズ駆動部によって停止状態から定常の駆動動作になるまでの区間Aと、定常の駆動動作の区間Bとに分けられる。そこで、本実施形態において、スペクトル解析部21は、区間AおよびBの駆動音信号をスペクトル解析し、特徴ベクトルVNAおよびVNBをそれぞれ生成してメモリ15に記録するものとする。これにより、音声信号に駆動音信号が重畳した箇所を正確に特定することが可能となる。
【0029】
なお、駆動音信号の特徴ベクトルVNは、一度求められたら他の撮像において何度も用いられてもよいし、撮像を行う度に駆動音を取得して更新されてもよい。また、スペクトル解析部21は、区間Aおよび区間Bだけでなく、定常の駆動動作から停止状態になるまでの区間の特徴ベクトルVNをも生成しメモリ15に記憶してもよい。
【0030】
演算部22は、正規化部26で正規化された特徴ベクトルVSおよびVNの単位特徴ベクトルeSおよびeNによる内積値を求める。
【0031】
判定部23は、演算部22が求めた内積値と閾値αとの比較に基づいて、マイクロホン20が取得した音声信号に駆動音信号が重畳しているか否かを判定する。ここで、内積値は0から1までの値であり、内積値が大きな値ほど音声信号に駆動音信号が重畳していることを示す。具体的には、内積値=0の場合、音声信号に駆動音信号が重畳していないことを示し、内積値=1の場合、音声信号=駆動音信号であることを示す。
【0032】
除去部24は、判定部23によって音声信号に駆動音信号が重畳していると判定された場合、音声信号の特徴ベクトルVS、駆動音信号の特徴ベクトルVNおよび閾値αを用いて、音声信号から重畳する駆動音信号が除去された特徴ベクトルV’Sを出力する。
【0033】
逆変換部25は、スペクトル解析部21の位相出力部(不図示)からの位相情報を用いて、除去部24によって駆動音信号が除去された特徴ベクトルV’Sから音声信号に逆変換する。
【0034】
メモリ15は、CPU14によって実行される各種のプログラムや画像ファイルなどとともに、上記駆動音信号の特徴ベクトルVNおよび閾値αを記憶する不揮発性のフラッシュメモリである。
【0035】
操作部16は、例えば、記録モードの切換入力や、後述する記憶媒体19への記録を伴う静止画や動画の撮像指示等をユーザから受け付ける。
【0036】
モニタ17は、液晶モニタ等のモニタであり、CPU14の制御によって各種画像を表示する。例えば、動画の撮像後において、CPU14の制御指示に応じて、モニタ17は、撮像された動画を再生表示する。また、本実施形態のモニタ17は、演算部22の生成した情報等を表示する。
【0037】
メディアI/F18には、不揮発性の記憶媒体19を着脱可能に接続できる。そして、メディアI/F18は、記憶媒体19に対してデータの書き込み/読み込みを実行する。上記の記憶媒体19は、ハードディスクや、半導体メモリを内蔵したメモリカードなどで構成される。なお、図1では記憶媒体19の一例としてメモリカードを図示する。
【0038】
マイクロホン20は、周囲の音声だけでなく、デジタルカメラ1が発する駆動音を受信して音声信号や駆動音信号の電気信号を出力する。また、マイクロホン20は、動画再生時等の場合、記録された音声信号を音波として出力するスピーカとして動作する。
【0039】
次に、図3の流れ図を参照しつつ、本実施形態のデジタルカメラ1による駆動音信号の除去処理動作について説明する。なお、除去対象となる装置はデジタルカメラ1自身とする。また、以下の説明では、駆動音信号としてAF制御動作時の駆動音とし、メモリ15には、特徴ベクトルVNAおよびVNBが記憶されているとする。
【0040】
具体的には、CPU14が、ユーザからの動画撮像指示(例えば、操作部16に含まれるレリーズ釦の全押し操作など)を受け付ける。CPU14は、撮像素子12に間引いた一部の受光素子から画像信号を出力させて被写体の動画撮像を開始する。同時に、CPU14は、マイクロホン20に被写体およびその周囲の音声を取得させ音声信号を出力させる。CPU14は、ステップS101〜ステップS108の処理を開始する。
【0041】
ステップS101:スペクトル解析部21は、マイクロホン20から出力される音声信号を、所定の時間間隔(例えば10m秒等)で所定の窓関数を適用して高速フーリエ変換、Z変換、または離散コサイン変換等の公知の手法を用いスペクトル解析する。スペクトル解析部21は、そのスペクトル解析によって求まる音声信号の周波数スペクトルから特徴ベクトルVSを生成する。また、スペクトル解析部21は、特徴ベクトルVSの各周波数成分の位相も求めて、逆変換部25へ出力する。
【0042】
ステップS102:演算部22は、メモリ15から駆動音信号の特徴ベクトルVNAおよびVNBを読み込む。正規化部26は、音声信号の特徴ベクトルVS、駆動音信号の特徴ベクトルVNAおよびVNBを正規化して、単位ベクトルeS、eNAおよびeNBを求める。
【0043】
ステップS103:演算部22は、単位ベクトルeSとeNAとの内積値eS×eNA、および単位ベクトルeSとeNBとの内積値eS×eNBをそれぞれ求める。図4は、内積値eS×eNA(上図)および音声信号(下図)の時間変化を示したものである。また、図5は、内積値eS×eNB(上図)および音声信号(下図)の時間変化を示したものである。なお、図4および5に示す点線は、撮像期間に、AF制御動作に伴う駆動音のうち区間Aの開始位置を示す。また、本実施形態における音声信号は、例えば、被写体として風景を動画撮像している場合で、マイクロホン20が、AF制御動作に伴う駆動音とともに周囲からセミの声を取得するものとする。図4および図5に示すように、区間Aの開始位置と内積値eS×eNAとがよく一致し、区間Bが区間Aの後に続いている。
【0044】
ステップS104:判定部23は、求めた内積値eS×eNAと閾値αAおよび内積値eS×eNBと閾値αBとの比較を行い、音声信号に区間Aの駆動音信号または区間Bの駆動音信号が音声信号に重畳しているか否かを判定する。なお、閾値αAおよびαBの各々は、動画撮像前に、ユーザによる操作部16の操作に基づいて、撮像状況に応じて予め設定されることが好ましい。本実施形態における閾値αAおよびαBは、例えば、0.65および0.5に設定されている(図4および図5)。
【0045】
判定部23は、内積値eS×eNAが閾値αAより大きい場合、音声信号に区間Aの駆動音信号が重畳していると判定して、ステップS105(YES側)へ移行する。一方、内積値eS×eNAが閾値αA以下の場合、判定部23は、音声信号に区間Aの駆動音信号が重畳していないと判定して、ステップS106(NO側)へ移行する。
【0046】
同様に、判定部23は、内積値eS×eNBが閾値αBより大きい場合、音声信号に区間Bの駆動音信号が重畳していると判定して、ステップS105(YES側)へ移行する。一方、内積値eS×eNBが閾値αB以下の場合、判定部23は、音声信号に区間Bの駆動音信号が重畳していないと判定して、ステップS106(NO側)へ移行する。
【0047】
ステップS105:除去部24は、内積値eS×eNAが閾値αAより大きい場合、音声信号の特徴ベクトルVSから区間Aの駆動音信号の特徴ベクトルVNAを閾値αAに応じて減算して、音声信号から区間Aの駆動音信号が除去された特徴ベクトルV’Sを出力する。
【0048】
一方、内積値eS×eNBが閾値αBより大きい場合、除去部24は、音声信号の特徴ベクトルVSから区間Bの駆動音の信号の特徴ベクトルVNBを閾値αBに応じて減算して、音声信号から区間Bの駆動音信号が除去された特徴ベクトルV’Sを出力する。
【0049】
ステップS106:逆変換部25は、スペクトル解析部21の位相出力部(不図示)からの位相情報を用いて、ステップS104の特徴ベクトルVS、または、ステップS105で駆動音信号が除去された特徴ベクトルV’Sを音声信号に逆変換する。
【0050】
ステップS107:CPU14は、Audio Video Interleave(AVI)やMotion JPEG等の所定の動画形式に応じて、画像データとステップS106で逆変換された音声信号とを動画データとしてメモリ15に一時的に記録する。
【0051】
ステップS108:CPU14は、ユーザによるレリーズ釦の全押しが解除されたか否かを判定する。CPU14は、レリーズ釦の全押しが解除されたと判定した場合(YES側)、メモリ15に一時的に記録された動画データのファイルを生成して、メモリ15や記憶媒体19に記録する。CPU14は、一連の処理を終了する。一方、CPU14は、レリーズ釦の全押しが解除されていないと判定した場合、ステップS101(NO側)へ移行する。CPU14は、ステップS101〜ステップS107の処理を、レリーズ釦の全押しが解除されるまで行う。
【0052】
このように、本実施形態は、レンズ駆動部(不図示)等を駆動させる操作信号等ではなく、音声信号の単位ベクトルeSと駆動音信号の単位ベクトルeNとの内積値eS×eNに基づいて、音声信号に駆動音信号が重畳した箇所を特定することにより、確度高く駆動音信号を除去することができる。
《実施形態の補足事項》
(1)本発明の信号処理装置は、上記実施形態のデジタルカメラ1の例に限定されない。例えば、コンピュータを本発明の信号処理装置として機能させてもよい。
【0053】
(2)上記実施形態では、デジタルカメラ1のスペクトル解析部21、演算部22、判定部23、除去部24、逆変換部25、正規化部26の各処理を、CPU14がソフトウエア的に実現する例を説明したが、ASICを用いてこれらの各処理をハードウエア的に実現しても勿論かまわない。
【0054】
(3)上記実施形態では、メモリ15は駆動音信号の特徴ベクトルVNAおよびVNBを記憶したが、メモリ15は特徴ベクトルVNAのみを記憶してもよい。すなわち、区間Bの駆動音信号は、区間Aの駆動音信号の後に続くことから、判定部23が区間Aの駆動音信号が重畳していると判定した箇所に基づいて、区間Bの駆動音信号の箇所を推定してもよい。
【0055】
(4)上記実施形態では、デジタルカメラ1による動画撮像で取得された音声信号に重畳した駆動音信号を除去したが、静止画像に付加される音声信号に対する駆動音信号の除去処理についても適用可能である。
【0056】
また、デジタルカメラ1が撮像した動画再生時に、重畳した駆動音信号の除去処理に対しても適用可能である。この場合、モニタ17が、CPU14からの制御指示に応じて、図4や図5の上図に示すような内積値eS×eNの時間変化等のグラフや、駆動音信号が重畳しているか否かの判断部23による判定結果を、動画とともに表示することが好ましい。さらに、モニタ17が内積値eS×eNの時間変化等のグラフを表示する場合、CPU14が、モニタ17の前面に配置された操作部16のタッチパネル等を介して、ユーザからの駆動音信号を除去する期間等の指示を受け付けられることが好ましい。
【0057】
(5)上記実施形態では、デジタルカメラ1が発する駆動音信号をスペクトル解析して求めた特徴ベクトルVNをメモリ15に記憶したが、次のようにしてもよい。例えば、CPU14は、デジタルカメラ1による撮像を行う前で、且つ周囲の音声や駆動音が無い無音状態で、マイクロホン20自身が有するホワイトノイズ等の背景ノイズを取得して、メモリ15に記憶する。CPU14は、スペクトル減算法等の公知の手法を用いて駆動音信号に含まれる背景ノイズを除去する。スペクトル解析部21は、背景ノイズが除去された駆動音信号をスペクトル解析して特徴ベクトルVNを生成しメモリ15に記憶してもよい。
【0058】
上記駆動音信号から背景ノイズを除去した後で特徴ベクトルVNを生成する理由は、次の通りである。駆動音に占める背景ノイズの割合が大きい場合、演算部22が音声信号の単位ベクトルeSと駆動音信号の単位ベクトルeNとの内積の演算を行うと、内積値eS×eNは、背景ノイズ同士の内積成分に引っ張られて全体的に大きな値になる。その結果、判定部23は、駆動音信号が重畳していない箇所であっても、駆動音信号が重畳していると判定してしまう。この判定部23による誤判定を回避するために、駆動音信号の特徴ベクトルVNを求める際に、駆動音信号から背景ノイズを除去する。これにより、音声信号の単位ベクトルeSと駆動音信号の単位ベクトルeNとの内積値eS×eNに基づいて、音声信号に駆動音信号が重畳した箇所をより正確に特定することができ、確度高く重畳した駆動音信号を除去することができる。
【0059】
(6)上記実施形態では、スペクトル解析部21が、所定の時間間隔毎の音声信号から特徴ベクトルVSを生成し、区間Aや区間Bの駆動音信号から特徴ベクトルVNAやVNBを生成したが、次のようにしてもよい。例えば、スペクトル解析部21は、特徴ベクトルVSを求めるにあたり、所定の時間間隔の音声信号を、さらに複数の時間区分に分割する。スペクトル解析部21は、各時間区分の音声信号をスペクトル解析し周波数スペクトルの複数の周波数成分の振幅を求める。スペクトル解析部21は、周波数成分毎に、各時間区分で求めた振幅のうち最小値、最大値または平均値をその周波数成分の振幅としてもよい。駆動音信号の特徴ベクトルVNについても同様である。
【0060】
これにより、例えば、各時間区分で求めた各周波数成分の振幅のうち最小値を選択して生成された駆動音信号の特徴ベクトルVNは、最小の振幅の値には駆動音信号のみの成分しかないものと見なすことができる。よって、上記背景ノイズを除去しなくても音声信号に駆動音の信号が重畳した箇所を正確に特定することができる。
【0061】
また、スペクトル解析部21は、上記各時間区分で駆動音信号の特徴ベクトルV’Nを求めて、それら複数の特徴ベクトルV’Nを時系列順に並べて特徴行列を生成する。スペクトル解析部21は、生成された特徴行列を非負値行列分解(NMF)等の手法を用いて分解することにより得られる1つあるいは複数の特徴ベクトルを駆動音信号の特徴ベクトルVNとして生成してもよい。
【0062】
以上の詳細な説明により、実施形態の特徴点および利点は明らかになるであろう。これは、特許請求の範囲が、その精神および権利範囲を逸脱しない範囲で前述のような実施形態の特徴点および利点にまで及ぶことを意図する。また、当該技術分野において通常の知識を有する者であれば、あらゆる改良および変更に容易に想到できるはずであり、発明性を有する実施形態の範囲を前述したものに限定する意図はなく、実施形態に開示された範囲に含まれる適当な改良物および均等物によることも可能である。
【符号の説明】
【0063】
1…デジタルカメラ、11…撮像光学系、12…撮像素子、13…DEF、14…CPU、15…メモリ、16…操作部、17…モニタ、18…メディアI/F、19…記憶媒体、20…マイクロホン、21…スペクトル解析部、22…演算部、23…判定部、24…除去部、25…逆変換部、26…正規化部
【特許請求の範囲】
【請求項1】
録音した音声信号の周波数特性から取得した複数の特徴量からなる第1の特徴量データを生成する解析部と、
撮像装置の駆動音信号の周波数特性から取得した複数の特徴量からなる第2の特徴量データを記憶する記憶部と、
前記第1の特徴量データおよび前記第2の特徴量データを用いて内積の演算を行う演算部と、
前記内積の値に基づいて前記音声信号に前記駆動音信号が重畳しているか否かを判定する判定部と、
を備えることを特徴とする信号処理装置。
【請求項2】
請求項1に記載の信号処理装置において、
前記第1の特徴量データおよび前記第2の特徴量データを正規化する正規化部を備え、
前記演算部は、
正規化された前記第1の特徴量データおよび前記第2の特徴量データを用いて前記内積の演算を行う
ことを特徴とする信号処理装置。
【請求項3】
請求項1または請求項2に記載の信号処理装置において、
前記判定部により前記音声信号に前記駆動音信号が重畳していると判定された場合、前記第1の特徴量データおよび前記第2の特徴量データを用いて前記音声信号から前記駆動音信号が除去された特徴量データを生成する除去部を備えることを特徴とする信号処理装置。
【請求項4】
請求項1ないし請求項3のいずれか1項に記載の信号処理装置において、
前記解析部は、
前記音声信号を所定の時間間隔で解析して前記第1の特徴量データを生成する
ことを特徴とする信号処理装置。
【請求項5】
請求項4に記載の信号処理装置において、
前記解析部は、
前記所定の時間間隔の前記音声信号を複数の時間区分に分割し、前記複数の時間区分毎に前記周波数特性から特徴量を取得し、前記複数の時間区分で取得した複数の前記特徴量のうち最小、最大または平均の値を求めて前記第1の特徴量データを生成する
ことを特徴とする信号処理装置。
【請求項6】
請求項1ないし請求項5のいずれか1項に記載の信号処理装置において、
前記記憶部は、
前記駆動音信号を所定の時間間隔毎に解析して求まる複数の前記第2の特徴量データを記憶する
ことを特徴とする信号処理装置。
【請求項7】
請求項6に記載の信号処理装置において、
前記第2の特徴量データの前記複数の特徴量のそれぞれは、前記所定の時間間隔の前記駆動音信号を複数の時間区分に分割し、前記複数の時間区分毎に前記周波数特性から特徴量を取得し、前記複数の時間区分で取得した複数の前記特徴量のうち最小、最大または平均の値であることを特徴とする信号処理装置。
【請求項8】
請求項1ないし請求項7のいずれか1項に記載の信号処理装置において、
前記第2の特徴量データは、前記駆動音信号から背景ノイズ信号が除去された信号の周波数特性から取得した複数の特徴量であることを特徴とする信号処理装置。
【請求項9】
請求項3ないし請求項8のいずれか1項に記載の信号処理装置において、
前記除去部により前記音声信号から前記駆動音信号が除去された特徴量データを逆変換して音声信号を出力する逆変換部を備え、
前記解析部は、
前記音声信号の前記周波数特性から取得した複数の特徴量それぞれに対応した位相情報を出力する位相出力部をさらに備え、
前記逆変換部は、
前記位相情報に基づいて逆変換する
ことを特徴とする信号処理装置。
【請求項10】
被写体像を撮像して画像を生成する撮像部と、
外部からの音声を音声信号として出力するマイクロホンと、
請求項1ないし請求項9のいずれか1項に記載の信号処理装置と、
を備えることを特徴とする撮像装置。
【請求項11】
コンピュータを請求項1ないし請求項9のいずれか1項に記載の信号処理装置として機能させることを特徴とする信号処理プログラム。
【請求項1】
録音した音声信号の周波数特性から取得した複数の特徴量からなる第1の特徴量データを生成する解析部と、
撮像装置の駆動音信号の周波数特性から取得した複数の特徴量からなる第2の特徴量データを記憶する記憶部と、
前記第1の特徴量データおよび前記第2の特徴量データを用いて内積の演算を行う演算部と、
前記内積の値に基づいて前記音声信号に前記駆動音信号が重畳しているか否かを判定する判定部と、
を備えることを特徴とする信号処理装置。
【請求項2】
請求項1に記載の信号処理装置において、
前記第1の特徴量データおよび前記第2の特徴量データを正規化する正規化部を備え、
前記演算部は、
正規化された前記第1の特徴量データおよび前記第2の特徴量データを用いて前記内積の演算を行う
ことを特徴とする信号処理装置。
【請求項3】
請求項1または請求項2に記載の信号処理装置において、
前記判定部により前記音声信号に前記駆動音信号が重畳していると判定された場合、前記第1の特徴量データおよび前記第2の特徴量データを用いて前記音声信号から前記駆動音信号が除去された特徴量データを生成する除去部を備えることを特徴とする信号処理装置。
【請求項4】
請求項1ないし請求項3のいずれか1項に記載の信号処理装置において、
前記解析部は、
前記音声信号を所定の時間間隔で解析して前記第1の特徴量データを生成する
ことを特徴とする信号処理装置。
【請求項5】
請求項4に記載の信号処理装置において、
前記解析部は、
前記所定の時間間隔の前記音声信号を複数の時間区分に分割し、前記複数の時間区分毎に前記周波数特性から特徴量を取得し、前記複数の時間区分で取得した複数の前記特徴量のうち最小、最大または平均の値を求めて前記第1の特徴量データを生成する
ことを特徴とする信号処理装置。
【請求項6】
請求項1ないし請求項5のいずれか1項に記載の信号処理装置において、
前記記憶部は、
前記駆動音信号を所定の時間間隔毎に解析して求まる複数の前記第2の特徴量データを記憶する
ことを特徴とする信号処理装置。
【請求項7】
請求項6に記載の信号処理装置において、
前記第2の特徴量データの前記複数の特徴量のそれぞれは、前記所定の時間間隔の前記駆動音信号を複数の時間区分に分割し、前記複数の時間区分毎に前記周波数特性から特徴量を取得し、前記複数の時間区分で取得した複数の前記特徴量のうち最小、最大または平均の値であることを特徴とする信号処理装置。
【請求項8】
請求項1ないし請求項7のいずれか1項に記載の信号処理装置において、
前記第2の特徴量データは、前記駆動音信号から背景ノイズ信号が除去された信号の周波数特性から取得した複数の特徴量であることを特徴とする信号処理装置。
【請求項9】
請求項3ないし請求項8のいずれか1項に記載の信号処理装置において、
前記除去部により前記音声信号から前記駆動音信号が除去された特徴量データを逆変換して音声信号を出力する逆変換部を備え、
前記解析部は、
前記音声信号の前記周波数特性から取得した複数の特徴量それぞれに対応した位相情報を出力する位相出力部をさらに備え、
前記逆変換部は、
前記位相情報に基づいて逆変換する
ことを特徴とする信号処理装置。
【請求項10】
被写体像を撮像して画像を生成する撮像部と、
外部からの音声を音声信号として出力するマイクロホンと、
請求項1ないし請求項9のいずれか1項に記載の信号処理装置と、
を備えることを特徴とする撮像装置。
【請求項11】
コンピュータを請求項1ないし請求項9のいずれか1項に記載の信号処理装置として機能させることを特徴とする信号処理プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−118316(P2012−118316A)
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願番号】特願2010−268233(P2010−268233)
【出願日】平成22年12月1日(2010.12.1)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願日】平成22年12月1日(2010.12.1)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
[ Back to top ]