
信号処理装置および信号処理方法
【課題】回転座標変換を行ってから所定の処理を行った後に静止座標変換を行うのと等価の処理を行うことができ、かつ、線形性および時不変性を有する信号処理装置を提供する。
【解決手段】所定の処理を表す伝達関数をF(s)とし、所定の角周波数をω0、虚数単位をjとした場合、信号処理装置が下記伝達関数の行列Gで表される処理を行うようにする。当該信号処理装置で行われる処理は線形時不変の処理なので、制御系の設計やシステム解析が容易になる。
【数1】

【解決手段】所定の処理を表す伝達関数をF(s)とし、所定の角周波数をω0、虚数単位をjとした場合、信号処理装置が下記伝達関数の行列Gで表される処理を行うようにする。当該信号処理装置で行われる処理は線形時不変の処理なので、制御系の設計やシステム解析が容易になる。
【数1】
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、信号処理装置および信号処理方法に関する。
【背景技術】
【0002】
従来、太陽電池などによって生成される直流電力を交流電力に変換して、電力系統に供給する系統連系インバータシステムが開発されている。
【0003】
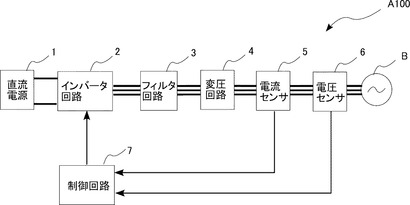
図13は、従来の一般的な系統連系インバータシステムを説明するためのブロック図である。
【0004】
系統連系インバータシステムA100は、直流電源1が生成した電力を変換して三相電力系統Bに供給するものである。なお、以下では3つの相をU相、V相およびW相とする。
【0005】
インバータ回路2は、直流電源1から入力される直流電圧をスイッチング素子(図示しない)のスイッチングにより交流電圧に変換する。フィルタ回路3は、インバータ回路2から出力される交流電圧に含まれるスイッチング周波数成分を除去する。変圧回路4は、フィルタ回路3から出力される交流電圧を三相電力系統Bの系統電圧に昇圧(または降圧)する。制御回路7は、電流センサ5および電圧センサ6などが検出した電流信号および電圧信号を入力され、これに基づいてPWM信号を生成してインバータ回路2に出力する。インバータ回路2は、制御回路7から入力されるPWM信号に基づいてスイッチング素子のスイッチングを行う。
【0006】
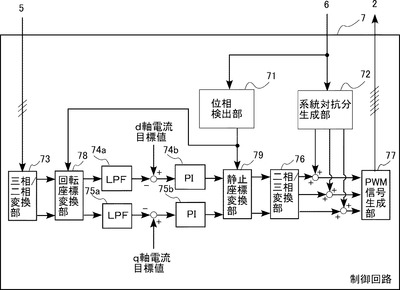
図14は、制御回路7の内部構成を説明するためのブロック図である。
【0007】
電流センサ5から入力された各相の電流信号は三相/二相変換部73に入力される。
【0008】
三相/二相変換部73は、入力された3つの電流信号Iu,Iv,Iwを、α軸電流信号Iαおよびβ軸電流信号Iβに変換するものである。三相/二相変換部73は、いわゆる三相/二相変換処理(αβ変換処理)を行うものであり、電流信号Iu,Iv,Iwを互いに直交するα軸成分とβ軸成分とにそれぞれ分解して、各軸成分をまとめることでα軸電流信号Iαおよびβ軸電流信号Iβを生成する。
【0009】
三相/二相変換部73で行われる変換処理は、下記(1)式に示す行列式で表される。
【数1】
【0010】
回転座標変換部78は、三相/二相変換部73から入力されるα軸電流信号Iαおよびβ軸電流信号Iβを、回転座標系のd軸電流信号Idおよびq軸電流信号Iqに変換するものである。回転座標系は、直交するd軸とq軸とを有し、三相電力系統Bの系統電圧の基本波と同一の角速度で同一の回転方向に回転する直交座標系である。回転座標系の反対概念として、回転しない座標系を静止座標系とする。回転座標変換部78は、いわゆる回転座標変換処理(dq変換処理)を行うものであり、静止座標系のα軸電流信号Iαおよびβ軸電流信号Iβを、位相検出部71が検出した系統電圧の基本波の位相θに基づいて、回転座標系のd軸電流信号Idおよびq軸電流信号Iqに変換する。
【0011】
回転座標変換部78で行われる変換処理は、下記(2)式に示す行列式で表される。
【数2】
【0012】
LPF74aおよびLPF75aは、ローパスフィルタであり、それぞれd軸電流信号Idおよびq軸電流信号Iqの直流成分だけを通過させる。回転座標変換処理によって、α軸電流信号Iαおよびβ軸電流信号Iβの基本波成分が、それぞれd軸電流信号Idおよびq軸電流信号Iqの直流成分に変換されている。PI制御部74bおよびPI制御部75bは、それぞれd軸電流信号Idおよびq軸電流信号Iqの直流成分とその目標値との偏差に基づいてPI制御を行い、補正値信号Xd,Xqを出力するものである。目標値として直流成分を用いることができるので、PI制御部74bおよびPI制御部75bは、精度のよい制御を行うことができる。
【0013】
静止座標変換部79は、PI制御部74bおよびPI制御部75bからそれぞれ入力される補正値信号Xd,Xqを、静止座標系の2つの補正値信号Xα,Xβに変換するものであり、回転座標変換部78とは逆の変換処理を行うものである。静止座標変換部79は、いわゆる静止座標変換処理(逆dq変換処理)を行うものであり、回転座標系の補正値信号Xd,Xqを、位相θに基づいて、静止座標系の補正値信号Xα,Xβに変換する。
【0014】
静止座標変換部79で行われる変換処理は、下記(3)式に示す行列式で表される。
【数3】
【0015】
二相/三相変換部76は、静止座標変換部79から入力される補正値信号Xα,Xβを、3つの補正値信号Xu,Xv,Xwに変換するものである。二相/三相変換部76は、いわゆる二相/三相変換処理(逆αβ変換処理)を行うものであり、三相/二相変換部73とは逆の変換処理を行うものである。
【0016】
二相/三相変換部76で行われる変換処理は、下記(4)式に示す行列式で表される。
【数4】
【0017】
PWM信号生成部77は、二相/三相変換部76が出力した補正値信号Xu,Xv,Xwに基づいてPWM信号を生成して出力する。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特開2009−44897号公報
【発明の概要】
【発明が解決しようとする課題】
【0019】
しかしながら、制御回路7の制御系を設計することに大変な労力が必要であるという問題がある。最近の系統連系インバータシステムには、瞬低に対して所定の時間以内に出力を復帰させるなど、制御に高速な応答性が求められている。このような要求を満たすように制御系を設計するために、LPF74aおよびLPF75aのパラメータや、PI制御部74bおよびPI制御部75bの比例ゲインおよび積分ゲインを最適に設計する必要がある。しかし、回転座標変換部78および静止座標変換部79は非線形時変処理を行うために、線形制御理論を用いて制御系を設計することができなかった。また、制御系が非線形時変処理を含むため、システム解析もできなかった。
【0020】
同様に、回転座標変換を行ってから所定の処理を行った後に静止座標変換を行う信号処理が含まれる制御系には線形制御理論に基づいた設計法を用いることができなかったし、このような制御系のシステム解析もできなかった。
【0021】
本発明は上記した事情のもとで考え出されたものであって、回転座標変換を行ってから所定の処理を行った後に静止座標変換を行うのと等価の処理を行うことができ、かつ、線形性および時不変性を有する信号処理装置を提供することをその目的としている。
【課題を解決するための手段】
【0022】
上記課題を解決するため、本発明では、次の技術的手段を講じている。
【0023】
本発明の第1の側面によって提供される信号処理装置は、入力された信号のうち所定の角周波数の正弦波信号の位相を90度進ませるか90度遅らせる第1の処理手段と、入力された信号のうち前記所定の角周波数の正弦波信号の位相を90度遅らせるか90度進ませる第2の処理手段と、入力された信号のうち前記所定の角周波数の正弦波信号の位相を変化させない第3の処理手段とを備えていることを特徴とする。
【0024】
本発明の好ましい実施の形態においては、第1の入力信号と第2の入力信号とを入力する入力手段と、前記第1の入力信号を前記第3の処理手段によって信号処理し、前記第2の入力信号を前記第1の処理手段によって信号処理し、両者を加算した第3の信号を生成する第1の信号処理手段と、前記第1の入力信号を前記第2の処理手段によって信号処理し、前記第2の入力信号を前記第3の処理手段によって信号処理し、両者を加算した第4の信号を生成する第2の信号処理手段と、前記第3の信号と前記第4の信号とを出力する出力手段とを備えている。
【0025】
本発明の好ましい実施の形態においては、所定の伝達関数をF(s)とし、前記所定の角周波数をω0、虚数単位をjとした場合、
【数5】
【0026】
本発明の好ましい実施の形態においては、前記所定の伝達関数がF(s)=KI/s(但し、KIは積分ゲイン)であって、
【数6】
【0027】
本発明の好ましい実施の形態においては、前記所定の伝達関数がF(s)=KP+KI/s(但し、KPおよびKIは、それぞれ比例ゲインおよび積分ゲイン)であって、
【数7】
【0028】
本発明の好ましい実施の形態においては、前記所定の伝達関数がF(s)=1/(T・s+1)(但し、Tは、時定数)であって、
【数8】
【0029】
本発明の好ましい実施の形態においては、前記所定の伝達関数がF(s)=T・s/(T・s+1)(但し、Tは、時定数)であって、
【数9】
【0030】
本発明の第2の側面によって提供される信号処理装置は、入力された信号のうち所定の角周波数の正弦波信号の位相を120度進ませるか120度遅らせる第1の処理手段と、入力された信号のうち前記所定の角周波数の正弦波信号の位相を120度遅らせるか120度進ませる第2の処理手段と、入力された信号のうち前記所定の角周波数の正弦波信号の位相を変化させない第3の処理手段とを備えていることを特徴とする。
【0031】
本発明の好ましい実施の形態においては、第1の入力信号、第2の入力信号、および第3の入力信号を入力する入力手段と、
前記第1の入力信号を前記第3の処理手段によって信号処理し、前記第2の入力信号を前記第1の処理手段によって信号処理し、前記第3の入力信号を前記第2の処理手段によって信号処理し、これらを加算した第4の信号を生成する第1の信号処理手段と、
前記第1の入力信号を前記第2の処理手段によって信号処理し、前記第2の入力信号を前記第3の処理手段によって信号処理し、前記第3の入力信号を前記第1の処理手段によって信号処理し、これらを加算した第5の信号を生成する第2の信号処理手段と、
前記第1の入力信号を前記第1の処理手段によって信号処理し、前記第2の入力信号を前記第2の処理手段によって信号処理し、前記第3の入力信号を前記第3の処理手段によって信号処理し、これらを加算した第6の信号を生成する第3の信号処理手段と、
前記第4の信号、前記第5の信号、および前記第6の信号を出力する出力手段と、
を備えている。
【0032】
本発明の好ましい実施の形態においては、所定の伝達関数をF(s)とし、前記所定の角周波数をω0、虚数単位をjとした場合、
【数10】
本発明の第3の側面によって提供される信号処理方法は、第1の入力信号と第2の入力信号とを入力する第1の工程と、前記第1の入力信号に第3の伝達関数で表される信号処理を行い、前記第2の入力信号に第1の伝達関数で表される信号処理を行い、両者を加算した第3の信号を生成する第2の工程と、前記第1の入力信号に前記第2の伝達関数で表される信号処理を行い、前記第2の入力信号に前記第3の伝達関数で表される信号処理を行い、両者を加算した第4の信号を生成する第3の工程と、前記第3の信号と前記第4の信号とを出力する第4の工程とを備えており、
【数11】
【発明の効果】
【0033】
本発明によれば、入力された信号のうち所定の角周波数の正弦波信号の位相を90度進ませ、90度遅らせ、または、そのままとする処理を行っている。これらの処理は線形性および時不変性を有する。入力された信号にこれらの処理を行ったものを加算して出力する場合、全体としても線形性および時不変性を有する。そして、伝達関数F(s)を用いた上記伝達関数G1(s)、G2(s)、G3(s)を用いた場合、回転座標変換を行ってから伝達関数F(s)で表される処理を行った後に静止座標変換を行うのと等価の処理を行うことができる。また、全体として線形性および時不変性を有するので、線形制御理論に基づいた設計法を用いることができ、制御系の設計を容易にすることができる。また、システム解析も行うことができる。
【0034】
本発明のその他の特徴および利点は、添付図面を参照して以下に行う詳細な説明によって、より明らかとなろう。
【図面の簡単な説明】
【0035】
【図1】回転座標変換および静止座標変換を伴う処理を線形時不変の処理に変換する方法について説明するためのブロック線図である。
【図2】回転座標変換および静止座標変換を伴う処理を線形時不変の処理に変換する方法について説明するためのブロック線図であり、行列で表したものである。
【図3】行列の計算を説明するためのブロック線図である。
【図4】回転座標変換を行ってからPI制御を行った後に静止座標変換を行う処理を示すブロック線図である。
【図5】第1実施形態に係る系統連系インバータシステムを説明するためのブロック図である。
【図6】行列GPIの各要素である伝達関数を解析するためのボード線図である。
【図7】第2実施形態に係る制御回路を説明するためのブロック図である。
【図8】回転座標変換を行ってからI制御を行った後に静止座標変換を行う処理を示すブロック線図である。
【図9】行列GIの各要素である伝達関数を解析するためのボード線図である。
【図10】回転座標変換を行ってからフィルタ処理を行った後に静止座標変換を行う処理を示すブロック線図である。
【図11】行列GLPFの各要素である伝達関数を解析するためのボード線図である。
【図12】行列GHPFの各要素である伝達関数を解析するためのボード線図である。
【図13】従来の一般的な系統連系インバータシステムを説明するためのブロック図である。
【図14】制御回路の内部構成を説明するためのブロック図である。
【発明を実施するための形態】
【0036】
以下、本発明の実施の形態を、図面を参照して具体的に説明する。
【0037】
まず、回転座標変換および静止座標変換を伴う処理を線形時不変の処理に変換する方法について説明する。
【0038】
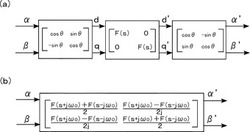
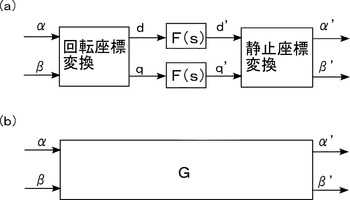
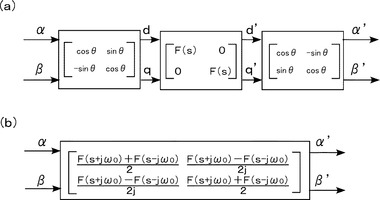
図1(a)は、回転座標変換および静止座標変換を伴う処理を説明するための図である。当該処理では、まず、信号αおよびβが、回転座標変換によって、信号dおよびqに変換される。信号dおよびqに対して、それぞれ所定の伝達関数F(s)で表される処理が行われ、信号d’およびq’が出力される。次に、信号d’およびq’が静止座標変換によって、信号α’およびβ’に変換される。図1(a)に示す非線形時変の処理を、図1(b)に示す線形時不変の伝達関数の行列Gを用いた処理に変換する。
【0039】
図1(a)に示す回転座標変換は下記(5)式の行列式で表され、静止座標変換は下記(6)式の行列式で表される。
【数12】
【0040】
したがって、図1(a)に示す処理を、行列を用いて、図2(a)のように表すことができる。図2(a)に示す3つの行列の積を計算し、算出された行列を線形時不変の行列にすることで、図1(b)に示す行列Gを算出することができる。このとき、静止座標変換および回転座標変換の行列を行列の積に変換したうえで、算出を行う。
【0041】
回転座標変換の行列は、下記(7)式に示す右辺の行列の積に変換することができる。
【数13】
但し、jは虚数単位であり、exp()は自然対数の底eの指数関数であり、
【数14】
である。なお、T-1は、Tの逆行列である。
【0042】
【数15】
となり、オイラーの公式より、exp(jθ)=cosθ+jsinθ、exp(−jθ)=cosθ−jsinθを代入して計算すると、
【数16】
であることが、確認できる。
【0043】
また、静止座標変換の行列は、下記(8)式に示す右辺の行列の積に変換することができる。
【数17】
但し、jは虚数単位であり、exp()は自然対数の底eの指数関数であり、
【数18】
である。なお、T-1は、Tの逆行列である。
【0044】
【数19】
となり、オイラーの公式より、exp(jθ)=cosθ+jsinθ、exp(−jθ)=cosθ−jsinθを代入して計算すると、
【数20】
であることが、確認できる。
【0045】
上記(7)式および(8)式を用いて、図2(a)に示す3つの行列の積を計算して、行列Gを算出すると、下記(9)式のように計算される。
【数21】
【0046】
上記(9)式の中央の3つの行列の1行1列目の要素に注目し、これをブロック線図で表すと、図3に示すブロック線図になる。図3に示すブロック線図の入出力特性を計算すると、
【数22】
となる。ただし、F(s)はインパルス応答f(t)をもつ一入力一出力伝達関数である 。
【0047】
ここで、θ(t)=ω0tとすると、θ(t)−θ(τ)=ω0t−ω0τ=ω0(t−τ)=θ(t−τ)となるので、図3に示すブロック線図の入出力特性は、インパルス応答f(t)exp(−jω0t)を持つ線形時不変系のものに等しい。インパルス応答f(t)exp(−jω0t)をラプラス変換すると、伝達関数F(s+jω0)が得られる。また、図3に示すブロック線図のexp(jθ(t))とexp(−jθ(t))とを入れ換えた場合の入出力特性は、伝達関数F(s−jω0)の入出力特性になる。
【0048】
したがって、上記(9)式からさらに計算を進めると、
【数23】
と計算される。
【0049】
これにより、図2(a)に示す処理を、図2(b)に示す処理に変換することができる。図2(b)に示す処理は、回転座標変換を行ってから所定の伝達関数F(s)で表される処理を行った後に静止座標変換を行う処理と等価の処理であって、当該処理のシステムは線形時不変のシステムである。
【0050】
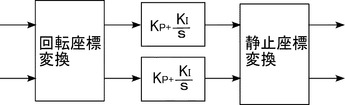
PI制御(比例積分制御)コントローラの伝達関数は、比例ゲインおよび積分ゲインをそれぞれKPおよびKIとすると、F(s)=KP+KI/sで表される。したがって、図4に示す処理、すなわち、回転座標変換を行ってからPI制御を行った後に静止座標変換を行う処理と等価の処理を示す伝達関数の行列GPIは、上記(10)式を用いて、下記(11)式のように算出される。
【数24】
【0051】
以下に、上記(11)式の伝達関数の行列GPIで表される処理を行う信号処理装置を系統連系インバータシステムに適用した場合を、本発明の第1実施形態として説明する。
【0052】
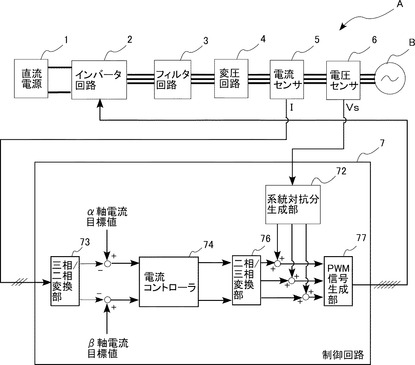
図5は、第1実施形態に係る系統連系インバータシステムを説明するためのブロック図である。
【0053】
同図に示すように、系統連系インバータシステムAは、直流電源1、インバータ回路2、フィルタ回路3、変圧回路4、電流センサ5、電圧センサ6、および制御回路7を備えている。
【0054】
直流電源1は、インバータ回路2に接続している。インバータ回路2、フィルタ回路3、および変圧回路4は、この順で、U相、V相、W相の出力電圧の出力ラインに直列に接続されて、三相交流の電力系統B(以下、「系統B」と略称する。)に接続している。電流センサ5および電圧センサ6は、変圧回路4の出力側に設置されている。制御回路7は、インバータ回路2に接続されている。系統連系インバータシステムAは、直流電源1が出力する直流電力を交流電力に変換して系統Bに供給する。なお、系統連系インバータシステムAの構成は、これに限られない。例えば、電流センサ5および電圧センサ6を変圧回路4の入力側に設けてもよいし、インバータ回路2の制御に必要な他のセンサを設けていてもよい。また、変圧回路4をフィルタ回路3の入力側に設けるようにしてもよいし、変圧回路4を設けない、いわゆるトランスレス方式にしてもよい。また、直流電源1とインバータ回路2との間にDC/DCコンバータ回路を設けるようにしてもよい。
【0055】
直流電源1は、直流電力を出力するものであり、例えば太陽電池を備えている。太陽電池は、太陽光エネルギーを電気エネルギーに変換することで、直流電力を生成する。直流電源1は、生成された直流電力を、インバータ回路2に出力する。なお、直流電源1は、太陽電池により直流電力を生成するものに限定されない。例えば、直流電源1は、燃料電池、蓄電池、電気二重層コンデンサやリチウムイオン電池であってもよいし、ディーゼルエンジン発電機、マイクロガスタービン発電機や風力タービン発電機などにより生成された交流電力を直流電力に変換して出力する装置であってもよい。
【0056】
インバータ回路2は、直流電源1から入力される直流電圧を交流電圧に変換して、フィルタ回路3に出力するものである。インバータ回路2は、三相インバータであり、図示しない3組6個のスイッチング素子を備えたPWM制御型インバータ回路である。インバータ回路2は、制御回路7から入力されるPWM信号に基づいて、各スイッチング素子のオンとオフとを切り替えることで、直流電源1から入力される直流電圧を交流電圧に変換する。なお、インバータ回路2はこれに限定されず、例えば、マルチレベルインバータであってもよい。
【0057】
フィルタ回路3は、インバータ回路2から入力される交流電圧から、スイッチングによる高周波成分を除去するものである。フィルタ回路3は、リアクトルとコンデンサとからなるローパスフィルタを備えている。フィルタ回路3で高周波成分を除去された交流電圧は、変圧回路4に出力される。なお、フィルタ回路3の構成はこれに限定されず、高周波成分を除去するための周知のフィルタ回路であればよい。変圧回路4は、フィルタ回路3から出力される交流電圧を系統Bの電圧(以下では、「系統電圧」という。)とほぼ同一のレベルに昇圧または降圧する。
【0058】
電流センサ5は、変圧回路4から出力される各相の交流電流(すなわち、系統連系インバータシステムAの出力電流)を検出するものである。検出された交流電流信号I(Iu,Iv,Iw)は、制御回路7に入力される。電圧センサ6は、系統Bの各相の系統電圧を検出するものである。検出された系統電圧信号Vs(Vsu,Vsv,Vsw)は、制御回路7に入力される。
【0059】
制御回路7は、インバータ回路2を制御するものであり、例えばマイクロコンピュータなどによって実現されている。制御回路7は、電流センサ5から入力される交流電流信号I、および、電圧センサ6から入力される系統電圧信号Vsに基づいて、PWM信号を生成してインバータ回路2に出力する。制御回路7は、系統連系インバータシステムAが出力する出力電圧の波形を指令するための指令値信号を各センサから入力される検出信号に基づいて生成し、当該指令値信号に基づいて生成されるパルス信号をPWM信号として出力する。インバータ回路2は、入力されるPWM信号に基づいて各スイッチング素子のオンとオフとを切り替えることで、指令値信号に対応した波形の交流電圧を出力する。制御回路7は、指令値信号の波形を変化させて系統連系インバータシステムAの出力電圧の波形を変化させることで、出力電流を制御している。これにより、制御回路7は、各種フィードバック制御を行っている。
【0060】
図5においては、出力電流制御を行うための構成のみを記載して、その他の制御のための構成を省略している。実際には、制御回路7は、直流電圧制御(入力直流電圧が予め設定された電圧目標値となるように行うフィードバック制御)や無効電力制御(出力無効電力が予め設定された無効電力目標値となるように行うフィードバック制御)なども行っている。なお、制御回路7が行う制御の手法は、これに限られない。例えば、出力電圧制御や有効電力制御を行うようにしてもよい。
【0061】
制御回路7は、系統対抗分生成部72、三相/二相変換部73、電流コントローラ74、二相/三相変換部76、およびPWM信号生成部77を備えている。
【0062】
系統対抗分生成部72は、電圧センサ6から系統電圧信号Vsを入力されて、系統指令値信号Ku,Kv,Kwを生成して出力する。系統指令値信号Ku,Kv,Kwは系統連系インバータシステムAが出力する出力電圧の波形を指令するための指令値信号の基準となるものであり、系統指令値信号Ku,Kv,Kwが後述する補正値信号Xu,Xv,Xwで補正されることにより指令値信号が生成される。
【0063】
三相/二相変換部73は、図14に示す三相/二相変換部73と同じものであり、電流センサ5より入力される3つの電流信号Iu,Iv,Iwを、α軸電流信号Iαおよびβ軸電流信号Iβに変換するものである。三相/二相変換部73で行われる変換処理は、上記(1)式に示す行列式で表される。
【0064】
電流コントローラ74は、三相/二相変換部73より出力されるα軸電流信号Iαおよびβ軸電流信号Iβとそれぞれの目標値との偏差を入力され、電流制御のための補正値信号Xα,Xβを出力するものである。電流コントローラ74は、上記(11)式の伝達関数の行列GPIで表される処理を行う。つまり、α軸電流信号Iαおよびβ軸電流信号Iβとそれぞれの目標値との偏差をそれぞれΔIαおよびΔIβとすると、下記(12)式に示す処理を行っている。角周波数ω0は系統電圧の基本波の角周波数(例えば、ω0=120π[rad/sec](60[Hz]))があらかじめ設定されている。また、比例ゲインKPおよび積分ゲインKIは、あらかじめ設計されている。
【数25】
【0065】
本実施形態において、α軸電流目標値およびβ軸電流目標値には、d軸電流目標値およびq軸電流目標値を静止座標変換したものが用いられる。d軸電流目標値には図示しない直流電圧制御のための補正値が用いられ、q軸電流目標値には、図示しない無効電力制御のための補正値が用いられる。なお、三相の電流目標値が与えられる場合は、当該目標値を三相/二相変換して、α軸電流目標値およびβ軸電流目標値とすればよい。また、α軸電流目標値およびβ軸電流目標値が直接与えられる場合は、当該目標値をそのまま用いればよい。
【0066】
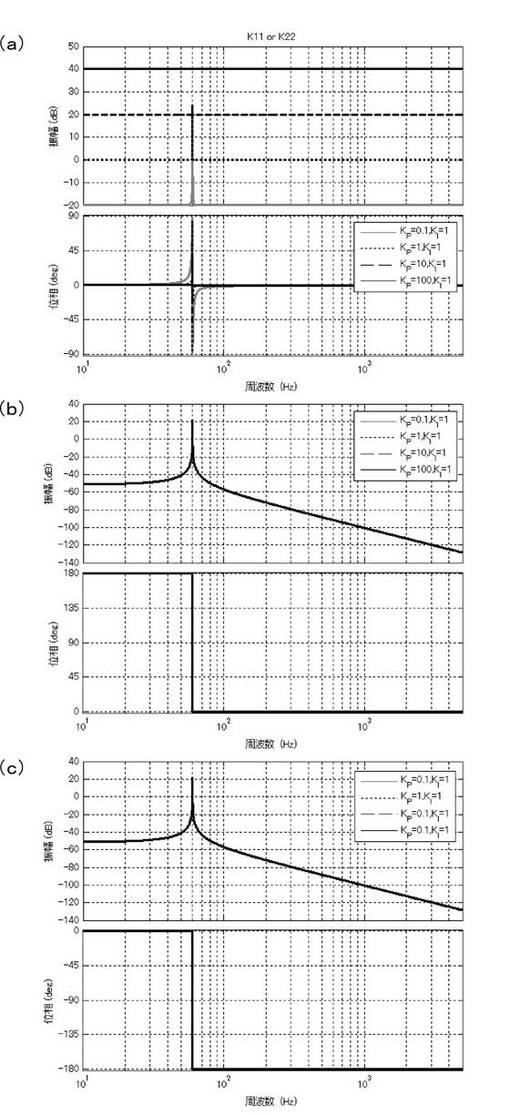
図6は、行列GPIの各要素である伝達関数を解析するためのボード線図である。同図(a)は行列GPIの1行1列要素(以下では、「(1,1)要素」と記載する。他の要素についても同様に記載する。)および(2,2)要素の伝達関数を示しており、同図(b)は行列GPIの(1,2)要素の伝達関数を示しており、同図(c)は行列GPIの(2,1)要素の伝達関数を示している。同図は、系統電圧の基本波の周波数(以下では、「中心周波数」とする。また、中心周波数に対応する角周波数を「中心角周波数」とする。)が60Hzの場合(すなわち、角周波数ω0=120πの場合)のものであり、積分ゲインKIを1に固定して、比例ゲインKPを「0.1」,「1」,「10」,「100」とした場合を示している。
【0067】
同図(a)が示す振幅特性は中心周波数にピークがあり、比例ゲインKPが大きくなると、中心周波数以外の振幅特性が大きくなっている。また、位相特性は、中心周波数で0度になる。つまり、行列GPIの(1,1)要素および(2,2)要素の伝達関数は、中心周波数(中心角周波数)の信号を位相を変化させることなく通過させる。なお、電流コントローラ74のうち行列GPIの(1,1)要素および(2,2)要素に対応する部分が、本発明の「第3の処理手段」に相当する。
【0068】
同図(b)および(c)が示す振幅特性も、中心周波数にピークがある。また、振幅特性および位相特性は、比例ゲインKPに関係なく一定である。また、同図(b)が示す位相特性は、中心周波数で90度になる。つまり、行列GPIの(1,2)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度進めて通過させる。一方、同図(c)が示す位相特性は、中心周波数で−90度になる。つまり、行列GPIの(2,1)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度遅らせて通過させる。なお、電流コントローラ74のうち行列GPIの(1,2)要素に対応する部分が、本発明の「第1の処理手段」に相当し、(2,1)要素に対応する部分が、本発明の「第2の処理手段」に相当する。
【0069】
二相/三相変換部76は、図14に示す二相/三相変換部76と同じものであり、電流コントローラ74から入力される補正値信号Xα,Xβを、3つの補正値信号Xu,Xv,Xwに変換するものである。二相/三相変換部76で行われる変換処理は、上記(4)式に示す行列式で表される。
【0070】
系統対抗分生成部72が出力する系統指令値信号Ku,Kv,Kwと、二相/三相変換部76が出力する補正値信号Xu,Xv,Xwとがそれぞれ加算されて、指令値信号X’u,X’v,X’wが算出され、PWM信号生成部77に入力される。
【0071】
PWM信号生成部77は、入力される指令値信号X’u,X’v,X’wと、所定の周波数(例えば、4kHz)の三角波信号として生成されたキャリア信号とに基づいて、三角波比較法によりPWM信号Pu,Pv,Pwを生成する。三角波比較法では、指令値信号X’u,X’v,X’wとキャリア信号とがそれぞれ比較され、例えば、指令値信号X’uがキャリア信号より大きい場合にハイレベルとなり、小さい場合にローレベルとなるパルス信号がPWM信号Puとして生成される。生成されたPWM信号Pu,Pv,Pwは、インバータ回路2に出力される。
【0072】
本実施形態において、制御回路7は、回転座標変換および静止座標変換を行うことなく、静止座標系で制御を行っている。上述したように、伝達関数の行列GPIは、回転座標変換を行ってからPI制御を行った後に静止座標変換を行う処理と等価の処理を示す伝達関数の行列である。したがって、伝達関数の行列GPIで表される処理を行う電流コントローラ74は、図14に示す回転座標変換部78、静止座標変換部79、PI制御部74bおよび75bで行われる処理と等価の処理を行っている。また、図6の各ボード線図が示すように、行列GPIの各要素の伝達関数の振幅特性は、中心周波数でピークを形成している。つまり、電流コントローラ74は、中心周波数成分だけがハイゲインになっている。したがって、図14に示すLPF74aおよび75aを設ける必要がない。
【0073】
また、電流コントローラ74で行われる処理は、伝達関数の行列GPIで示されるので、線形時不変の処理である。また、制御回路7には非線形時変処理である回転座標変換処理および静止座標変換処理が含まれておらず、電流制御システム全体が線形時不変システムになっている。したがって、線形制御理論を用いた制御系設計やシステム解析が可能となる。
【0074】
このように、上記(10)式に示す行列を用いることで、パワーエレクトロニクスの分野で多く用いられてきた回転座標変換を行ってから伝達関数F(s)で表される処理を行った後に静止座標変換を行う非線形の処理を、線形時不変の多入出力系へ帰着させることができ、これによりシステム解析や制御系設計が容易になる。
【0075】
なお、上記実施形態においては、電流コントローラ74で上記(12)式に示す処理を行っているが、行列GPIの各要素の比例ゲインKPおよび積分ゲインKIに要素毎に異なる値を用いるようにしてもよい。すなわち、各要素である伝達関数毎に異なる比例ゲインKPおよび積分ゲインKIを設計して用いるようにしてもよい。この場合でも、各要素である伝達関数の位相特性は変化しない。したがって、(1,1)要素および(2,2)要素の伝達関数は中心周波数の信号を位相を変化させることなく通過させ、(1,2)要素の伝達関数は中心周波数の信号の位相を90度進めて通過させ、(2,1)要素の伝達関数は中心周波数の信号の位相を90度遅らせて通過させることができる。
【0076】
上記実施形態においては、3つの電流信号Iu,Iv,Iwをα軸電流信号Iαおよびβ軸電流信号Iβに変換して制御する場合について説明したが、これに限られない。例えば、3つの電流信号Iu,Iv,Iwを用いて直接制御するようにしてもよい。以下に、この場合の実施形態を第2実施形態として説明する。
【0077】
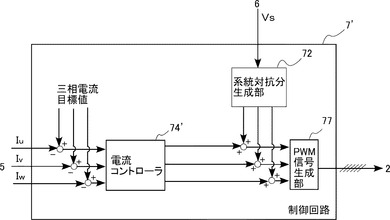
図7は、第2実施形態に係る制御回路を説明するためのブロック図である。同図において、図5に示す制御回路7と同一または類似の要素には、同一の符号を付している。
【0078】
図7に示す制御回路7’は、三相/二相変換部73および二相/三相変換部76を備えておらず、電流コントローラ74’が3つの電流信号Iu,Iv,Iwを用いて直接制御を行う点で、第1実施形態に係る制御回路7と異なる(図5参照)。
【0079】
三相/二相変換および二相/三相変換は、上記(1)式および(4)式で表されるので、三相/二相変換を行ってから伝達関数の行列Gで表される処理を行った後に二相/三相変換を行う処理は、下記(13)式に示す伝達関数の行列G’で表される。
【数26】
【0080】
したがって、電流コントローラ74’が行う処理を表す伝達関数の行列G’PIは、下記(14)式で表される。
【数27】
【0081】
電流コントローラ74’は、電流センサ5より出力される3つの電流信号Iu,Iv,Iwとそれぞれの目標値との偏差を入力され、電流制御のための補正値信号Xu,Xv,Xwを出力するものである。電流コントローラ74’は、上記(14)式の伝達関数の行列G’PIで表される処理を行う。つまり、電流信号Iu,Iv,Iwとそれぞれの目標値との偏差をそれぞれΔIu,ΔIv,ΔIwとすると、下記(15)式に示す処理を行っている。
【数28】
【0082】
本実施形態において、電流信号Iu,Iv,Iwの目標値には、d軸電流目標値およびq軸電流目標値を静止座標変換してさらに二相/三相変換したものが用いられる。なお、三相の電流目標値が直接与えられる場合は、当該目標値をそのまま用いればよい。また、α軸電流目標値およびβ軸電流目標値が与えられる場合は、二相/三相変換したものを用いればよい。
【0083】
本実施形態において、伝達関数の行列G’PIで表される処理を行う電流コントローラ74’は、図14に示す三相/二相変換部73、二相/三相変換部76、回転座標変換部78、静止座標変換部79、PI制御部74bおよび75bで行われる処理と等価の処理を行っている。また、電流コントローラ74’で行われる処理は、伝達関数の行列G’PIで示されるので、線形時不変の処理である。したがって、電流制御システム全体が線形時不変システムになっているので、線形制御理論を用いた制御系設計やシステム解析が可能となる。
【0084】
上記第1および第2実施形態においては、電流コントローラ74(74’)がPI制御を行う場合について説明したがこれに限られない。例えば、I制御(積分制御)を行うようにしてもよい。
【0085】
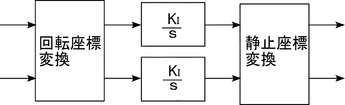
I制御コントローラの伝達関数は、積分ゲインをKIとすると、F(s)=KI/sで表される。したがって、図8に示す処理、すなわち、回転座標変換を行ってからI制御を行った後に静止座標変換を行う処理と等価の処理を示す伝達関数の行列GIは、上記(10)式を用いて、下記(16)式のように算出される。
【数29】
【0086】
したがって、電流コントローラ74(74’)がI制御を行うようにする場合は、上記(16)式に示される伝達関数の行列GIを用いればよい。
【0087】
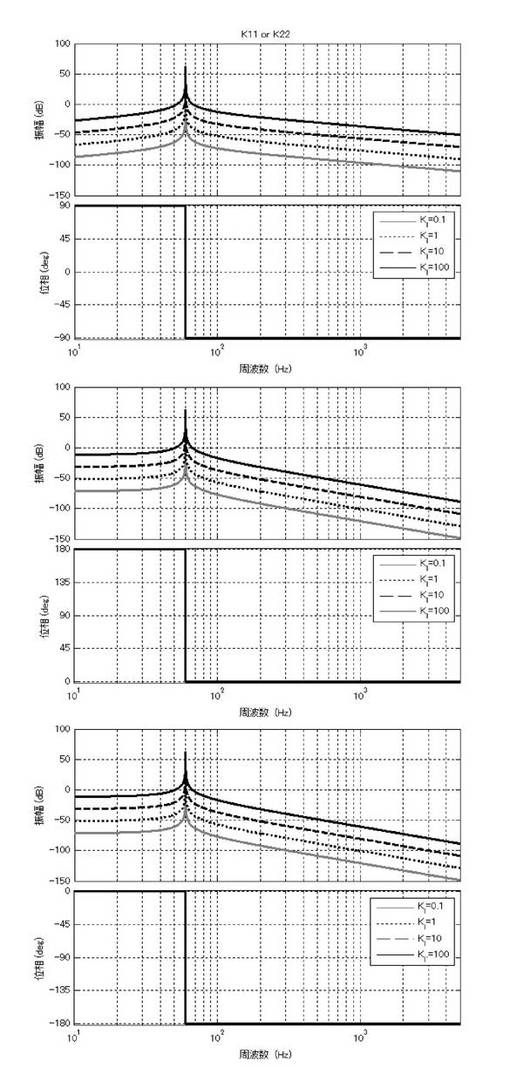
図9は、行列GIの各要素である伝達関数を解析するためのボード線図である。同図(a)は行列GIの(1,1)要素および(2,2)要素の伝達関数を示しており、同図(b)は行列GIの(1,2)要素の伝達関数を示しており、同図(c)は行列GIの(2,1)要素の伝達関数を示している。同図は、中心周波数が60Hzの場合のものであり、積分ゲインKIを「0.1」,「1」,「10」,「100」とした場合を示している。
【0088】
同図(a),(b)および(c)が示す振幅特性は、いずれも、中心周波数にピークがあり、積分ゲインKIが大きくなると、振幅特性が大きくなっている。また、同図(a)が示す位相特性は、中心周波数で0度になる。つまり、行列GIの(1,1)要素および(2,2)要素の伝達関数は、中心周波数(中心角周波数)の信号を位相を変化させることなく通過させる。同図(b)が示す位相特性は、中心周波数で90度になる。つまり、行列GIの(1,2)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度進めて通過させる。一方、同図(c)が示す位相特性は、中心周波数で−90度になる。つまり、行列GIの(2,1)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度遅らせて通過させる。
【0089】
上記第1および第2実施形態においては、電流信号Iu,Iv,Iwの基本波成分(正相分)の制御を行う場合について説明したが、これに限られない。電流信号Iu,Iv,Iwの逆相分の制御を行うようにしてもよい。
【0090】
三相/二相変換部73(図5参照)から出力されるα軸電流信号Iαの中心周波数成分は、β軸電流信号Iβの中心周波数成分より90度位相が進んでいる。したがって、目標値との偏差ΔIαの中心周波数成分もΔIβの中心周波数成分より90度位相が進んでいる。偏差ΔIαに行列GPIの(1,1)要素の伝達関数に示す処理を行うと、中心周波数成分の位相は変化しない(図6(a)参照)。また、偏差ΔIβに行列GPIの(1,2)要素の伝達関数に示す処理を行うと、中心周波数成分の位相が90度進む(図6(b)参照)。したがって、両者の位相が偏差ΔIαの中心周波数成分と同じ位相になるので、両者を加算することで強め合うことになる。一方、偏差ΔIαに行列GPIの(2,1)要素の伝達関数に示す処理を行うと、中心周波数成分の位相が90度遅れる(図6(c)参照)。また、偏差ΔIβに行列GPIの(2,2)要素の伝達関数に示す処理を行うと、中心周波数成分の位相は変化しない。したがって、両者の位相が偏差ΔIβの中心周波数成分と同じ位相になるので、両者を加算することで強め合うことになる。
【0091】
逆相分は相順が正相分とは逆方向になっている成分である。したがって、三相/二相変換部73より出力されるβ軸電流信号Iβにおいて、正相分とは位相が180度異なる成分として含まれている。偏差ΔIβに行列GPIの(1,2)要素の伝達関数に示す処理を行うと、逆相分の位相も90度進んで、偏差ΔIαの中心周波数成分と逆位相になり、打ち消し合うことになる。また、偏差ΔIαに行列GPIの(2,1)要素の伝達関数に示す処理を行うと位相が90度遅れて、偏差ΔIβの逆相分と逆位相になり、打ち消し合うことになる。したがって、電流コントローラ74は、正相分の制御を行ない、逆相分の制御は行なわない。
【0092】
伝達関数の行列GPIの(1,2)要素と(2,1)要素とを入れ換えた場合、上記とは逆に、正相分が打ち消しあって、逆相成分が強めあうことになる。したがって、第1実施形態において逆相分の制御を行う場合には、伝達関数の行列GPI(GI)の(1,2)要素と(2,1)要素とを入れ換えた行列を用いればよい。また、第2実施形態において逆相分の制御を行う場合には、伝達関数の行列G’PIの要素の内、GPI12(s)、GPI23(s)およびGPI31(s)と、GPI13(s)、GPI21(s)およびGPI32(s)とを入れ換えた行列(すなわち、行列G’PIの転置行列)を用いればよい。I制御の場合は伝達関数の行列を記載していないが、PI制御の場合と同様である。
【0093】
上記第1および第2実施形態においては、本発明に係る信号処理装置をPI制御(I制御)に用いた場合について説明したが、本発明の適用範囲はこれに限られない。本発明は、回転座標変換を行ってから所定の処理を行った後に静止座標変換を行うのと等価の処理を行う信号処理装置であり、所定の処理が線形時不変の処理であれば、信号処理装置全体として線形時不変とすることができる。したがって、例えば、所定の処理をD制御(微分制御:伝達関数は、微分ゲインをKDとすると、F(s)=KD・sで表される。)、P制御(比例制御:伝達関数は、比例ゲインをKPとすると、F(s)=KPで表される。)、PD制御、ID制御、PID制御などとした場合にも、本発明を適用することができる。また、例えば、所定の処理をフィルタ処理とした場合などにも、本発明を適用することができる。
【0094】
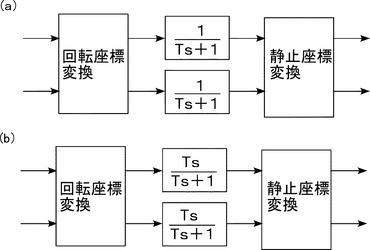
ローパスフィルタの伝達関数は、時定数をTとすると、F(s)=1/(Ts+1)で表される。したがって、図10(a)に示す処理、すなわち、回転座標変換を行ってからローパスフィルタ処理を行った後に静止座標変換を行う処理と等価の処理を示す伝達関数の行列GLPFは、上記(10)式を用いて、下記(17)式のように算出される。
【数30】
【0095】
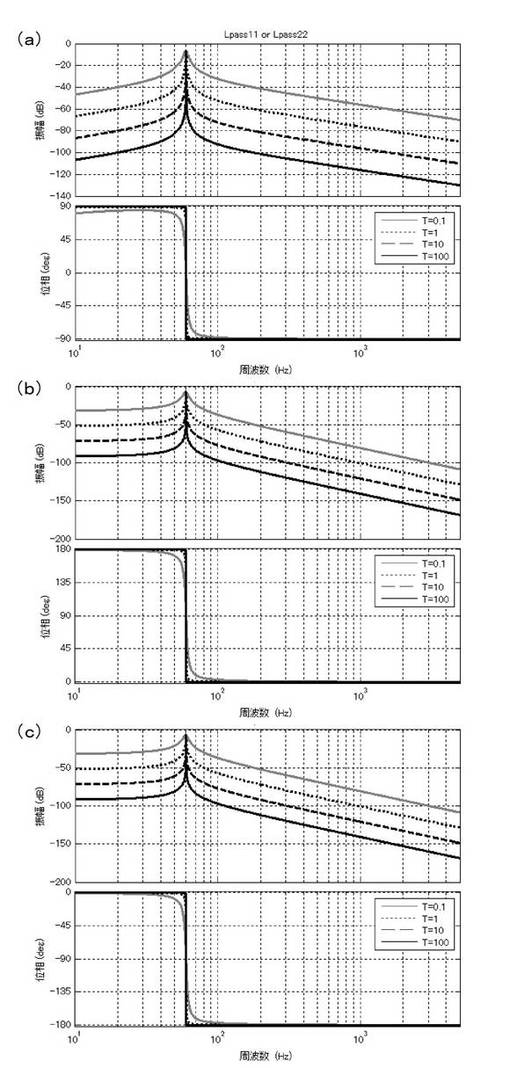
図11は、行列GLPFの各要素である伝達関数を解析するためのボード線図である。同図(a)は行列GLPFの(1,1)要素および(2,2)要素の伝達関数を示しており、同図(b)は行列GLPFの(1,2)要素の伝達関数を示しており、同図(c)は行列GLPFの(2,1)要素の伝達関数を示している。同図は、中心角周波数が60Hzの場合のものであり、時定数Tを「0.1」,「1」,「10」,「100」とした場合を示している。
【0096】
同図(a),(b)および(c)が示す振幅特性は、いずれも、中心周波数にピークがあり、時定数Tが大きくなると、通過帯域が小さくなっている。また、同図(a)が示す位相特性は、中心周波数で0度になる。つまり、行列GLPFの(1,1)要素および(2,2)要素の伝達関数は、中心周波数(中心角周波数)の信号を位相を変化させることなく通過させる。同図(b)が示す位相特性は、中心周波数で90度になる。つまり、行列GLPFの(1,2)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度進めて通過させる。一方、同図(c)が示す位相特性は、中心周波数で−90度になる。つまり、行列GLPFの(2,1)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度遅らせて通過させる。
【0097】
また、図11(a),(b)および(c)が示す振幅特性のピークは、−6dB(=1/2)である。三相/二相変換後の2つの信号αとβ(αの中心周波数成分の位相がβの中心周波数成分の位相より90度進んでいるとする)に対する伝達関数の行列GLPFに示す処理を考える。信号αに行列GLPFの(1,1)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相が変化しない(図11(a)参照)。また、信号βに行列GLPFの(1,2)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相が90度進む(図11(b)参照)。したがって、両者を加算することで、信号αの中心周波数成分が抽出できる。一方、信号αに行列GLPFの(2,1)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相が90度遅れる(図11(c)参照)。また、信号βに行列GLPFの(2,2)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相は変化しない。したがって、両者を加算することで、信号βの中心周波数成分が抽出できる。つまり、伝達関数の行列GLPFに示す処理は、信号αとβから中心周波数成分を抽出するものである。
【0098】
信号βに行列GLPFの(1,2)要素の伝達関数に示す処理を行うと、逆相分の位相も90度進んで、信号αの逆相分と逆位相になり、打ち消し合うことになる。また、信号αに行列GLPFの(2,1)要素の伝達関数に示す処理を行うと、逆相分の位相も90度遅れて、信号βの逆相分と逆位相になり、打ち消し合うことになる。したがって、伝達関数の行列GLPFに示す処理は、逆相分を遮断する。
【0099】
なお、中心周波数成分(正相分)ではなく、逆相分を抽出する場合には、伝達関数の行列GLPFの(1,2)要素と(2,1)要素とを入れ換えた行列を用いればよい。
【0100】
ハイパスフィルタの伝達関数は、時定数をTとすると、F(s)=Ts/(Ts+1)で表される。したがって、図10(b)に示す処理、すなわち、回転座標変換を行ってからハイパスフィルタ処理を行った後に静止座標変換を行う処理と等価の処理を示す伝達関数の行列GHPFは、上記(10)式を用いて、下記(18)式のように算出される。
【数31】
【0101】
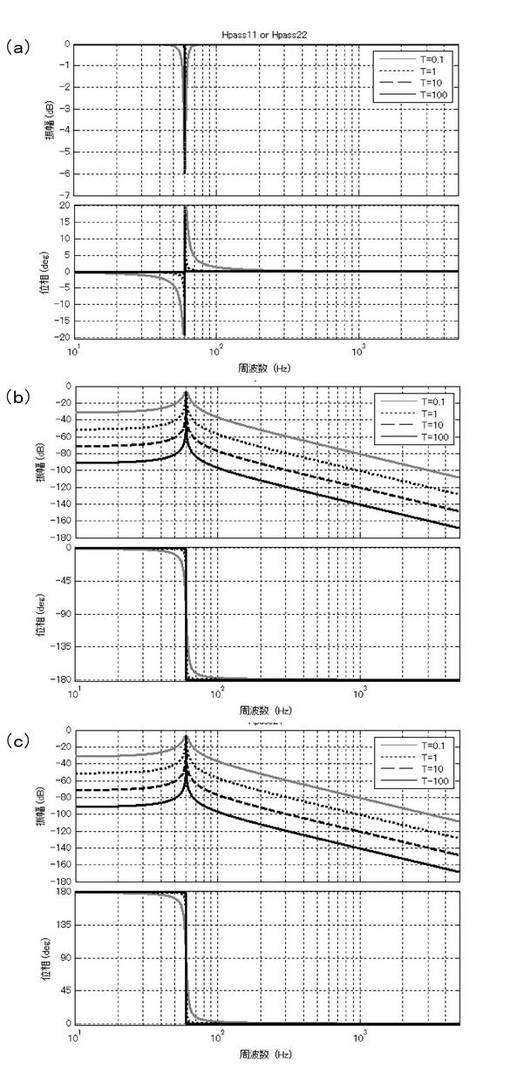
図12は、行列GHPFの各要素である伝達関数を解析するためのボード線図である。同図(a)は行列GHPFの(1,1)要素および(2,2)要素の伝達関数を示しており、同図(b)は行列GHPFの(1,2)要素の伝達関数を示しており、同図(c)は行列GHPFの(2,1)要素の伝達関数を示している。同図は、中心角周波数が60Hzの場合のものであり、時定数Tを「0.1」,「1」,「10」,「100」とした場合を示している。
【0102】
同図(a)が示す振幅特性は、中心周波数のみが減衰している。また、時定数Tが大きくなると、遮断帯域が小さくなっている。同図(b)および(c)が示す振幅特性は、いずれも、中心周波数にピークがあり、時定数Tが大きくなると、通過帯域が小さくなっている。また、同図(a)が示す位相特性は、中心周波数で0度になる。つまり、行列GHPFの(1,1)要素および(2,2)要素の伝達関数は、中心周波数(中心角周波数)の信号を位相を変化させることなく通過させる。同図(b)が示す位相特性は、中心周波数で−90度になる。つまり、行列GHPFの(1,2)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度遅らせて通過させる。一方、同図(c)が示す位相特性は、中心周波数で90度になる。つまり、行列GHPFの(2,1)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度進めて通過させる。
【0103】
図12(b)および(c)が示す振幅特性のピークは、−6dB(=1/2)である。また、図12(a)が示す振幅特性も、中心周波数で−6dB(=1/2)である。三相/二相変換後の2つの信号αとβ(αの中心周波数成分の位相がβの中心周波数成分の位相より90度進んでいるとする)に対する伝達関数の行列GHPFに示す処理を考える。信号αに行列GHPFの(1,1)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相が変化せず、他の成分はそのまま通過する(図12(a)参照)。また、信号βに行列GHPFの(1,2)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相が90度遅れる(図12(b)参照)。したがって、両者を加算すると中心周波数成分が打ち消しあうので、信号αの中心周波数成分だけが除去される。一方、信号αに行列GHPFの(2,1)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相が90度進む(図12(c)参照)。また、信号βに行列GHPFの(2,2)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相は変化せず、他の成分はそのまま通過する。したがって、両者を加算すると中心周波数成分が打ち消しあうので、信号βの中心周波数成分だけが除去される。つまり、伝達関数の行列GHPFに示す処理は、信号αとβから中心周波数成分だけを除去するものであり、ノッチフィルタの特性を有する。
【0104】
信号βに行列GHPFの(1,2)要素の伝達関数に示す処理を行うと、逆相分の位相も90度遅れて、信号αの逆相分と同位相になり、強め合うことになる。また、信号αに行列GHPFの(2,1)要素の伝達関数に示す処理を行うと位相が90度進んで、信号βの逆相分と同位相になり、強め合うことになる。したがって、伝達関数の行列GHPFに示す処理は、逆相分を通過させる。
【0105】
なお、中心周波数成分(正相分)ではなく、逆相分を遮断する場合には、伝達関数の行列GHPFの(1,2)要素と(2,1)要素とを入れ換えた行列を用いればよい。
【0106】
上記第1および第2実施形態においては、本発明に係る信号処理装置を系統連系インバータシステムに用いた場合について説明したが、これに限られない。本発明に係る信号処理装置は、どのようなシステムにおいても、用いることができる。すなわち、従来、回転座標変換を行って回転座標系で処理を行っていた信号処理を、本発明に係る信号処理装置の処理に置き換えることができる。例えば、アクティブフィルタや電動モータ、発電機、高周波電源、通信機器、画像処理装置、音響装置などの制御装置にも、本発明に係る信号処理装置を用いることができる。
【0107】
本発明に係る信号処理装置および信号処理方法は、上述した実施形態に限定されるものではない。本発明に係る信号処理装置および信号処理方法の各部の具体的な構成は、種々に設計変更自在である。
【符号の説明】
【0108】
A 系統連系インバータシステム
1 直流電源
2 インバータ回路
3 フィルタ回路
4 変圧回路
5 電流センサ
6 電圧センサ
7,7’ 制御回路
72 系統対抗分生成部
73 三相/二相変換部
74,74’ 電流コントローラ(信号処理装置)
76 二相/三相変換部
77 PWM信号生成部
B 電力系統
【技術分野】
【0001】
本発明は、信号処理装置および信号処理方法に関する。
【背景技術】
【0002】
従来、太陽電池などによって生成される直流電力を交流電力に変換して、電力系統に供給する系統連系インバータシステムが開発されている。
【0003】
図13は、従来の一般的な系統連系インバータシステムを説明するためのブロック図である。
【0004】
系統連系インバータシステムA100は、直流電源1が生成した電力を変換して三相電力系統Bに供給するものである。なお、以下では3つの相をU相、V相およびW相とする。
【0005】
インバータ回路2は、直流電源1から入力される直流電圧をスイッチング素子(図示しない)のスイッチングにより交流電圧に変換する。フィルタ回路3は、インバータ回路2から出力される交流電圧に含まれるスイッチング周波数成分を除去する。変圧回路4は、フィルタ回路3から出力される交流電圧を三相電力系統Bの系統電圧に昇圧(または降圧)する。制御回路7は、電流センサ5および電圧センサ6などが検出した電流信号および電圧信号を入力され、これに基づいてPWM信号を生成してインバータ回路2に出力する。インバータ回路2は、制御回路7から入力されるPWM信号に基づいてスイッチング素子のスイッチングを行う。
【0006】
図14は、制御回路7の内部構成を説明するためのブロック図である。
【0007】
電流センサ5から入力された各相の電流信号は三相/二相変換部73に入力される。
【0008】
三相/二相変換部73は、入力された3つの電流信号Iu,Iv,Iwを、α軸電流信号Iαおよびβ軸電流信号Iβに変換するものである。三相/二相変換部73は、いわゆる三相/二相変換処理(αβ変換処理)を行うものであり、電流信号Iu,Iv,Iwを互いに直交するα軸成分とβ軸成分とにそれぞれ分解して、各軸成分をまとめることでα軸電流信号Iαおよびβ軸電流信号Iβを生成する。
【0009】
三相/二相変換部73で行われる変換処理は、下記(1)式に示す行列式で表される。
【数1】
【0010】
回転座標変換部78は、三相/二相変換部73から入力されるα軸電流信号Iαおよびβ軸電流信号Iβを、回転座標系のd軸電流信号Idおよびq軸電流信号Iqに変換するものである。回転座標系は、直交するd軸とq軸とを有し、三相電力系統Bの系統電圧の基本波と同一の角速度で同一の回転方向に回転する直交座標系である。回転座標系の反対概念として、回転しない座標系を静止座標系とする。回転座標変換部78は、いわゆる回転座標変換処理(dq変換処理)を行うものであり、静止座標系のα軸電流信号Iαおよびβ軸電流信号Iβを、位相検出部71が検出した系統電圧の基本波の位相θに基づいて、回転座標系のd軸電流信号Idおよびq軸電流信号Iqに変換する。
【0011】
回転座標変換部78で行われる変換処理は、下記(2)式に示す行列式で表される。
【数2】
【0012】
LPF74aおよびLPF75aは、ローパスフィルタであり、それぞれd軸電流信号Idおよびq軸電流信号Iqの直流成分だけを通過させる。回転座標変換処理によって、α軸電流信号Iαおよびβ軸電流信号Iβの基本波成分が、それぞれd軸電流信号Idおよびq軸電流信号Iqの直流成分に変換されている。PI制御部74bおよびPI制御部75bは、それぞれd軸電流信号Idおよびq軸電流信号Iqの直流成分とその目標値との偏差に基づいてPI制御を行い、補正値信号Xd,Xqを出力するものである。目標値として直流成分を用いることができるので、PI制御部74bおよびPI制御部75bは、精度のよい制御を行うことができる。
【0013】
静止座標変換部79は、PI制御部74bおよびPI制御部75bからそれぞれ入力される補正値信号Xd,Xqを、静止座標系の2つの補正値信号Xα,Xβに変換するものであり、回転座標変換部78とは逆の変換処理を行うものである。静止座標変換部79は、いわゆる静止座標変換処理(逆dq変換処理)を行うものであり、回転座標系の補正値信号Xd,Xqを、位相θに基づいて、静止座標系の補正値信号Xα,Xβに変換する。
【0014】
静止座標変換部79で行われる変換処理は、下記(3)式に示す行列式で表される。
【数3】
【0015】
二相/三相変換部76は、静止座標変換部79から入力される補正値信号Xα,Xβを、3つの補正値信号Xu,Xv,Xwに変換するものである。二相/三相変換部76は、いわゆる二相/三相変換処理(逆αβ変換処理)を行うものであり、三相/二相変換部73とは逆の変換処理を行うものである。
【0016】
二相/三相変換部76で行われる変換処理は、下記(4)式に示す行列式で表される。
【数4】
【0017】
PWM信号生成部77は、二相/三相変換部76が出力した補正値信号Xu,Xv,Xwに基づいてPWM信号を生成して出力する。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特開2009−44897号公報
【発明の概要】
【発明が解決しようとする課題】
【0019】
しかしながら、制御回路7の制御系を設計することに大変な労力が必要であるという問題がある。最近の系統連系インバータシステムには、瞬低に対して所定の時間以内に出力を復帰させるなど、制御に高速な応答性が求められている。このような要求を満たすように制御系を設計するために、LPF74aおよびLPF75aのパラメータや、PI制御部74bおよびPI制御部75bの比例ゲインおよび積分ゲインを最適に設計する必要がある。しかし、回転座標変換部78および静止座標変換部79は非線形時変処理を行うために、線形制御理論を用いて制御系を設計することができなかった。また、制御系が非線形時変処理を含むため、システム解析もできなかった。
【0020】
同様に、回転座標変換を行ってから所定の処理を行った後に静止座標変換を行う信号処理が含まれる制御系には線形制御理論に基づいた設計法を用いることができなかったし、このような制御系のシステム解析もできなかった。
【0021】
本発明は上記した事情のもとで考え出されたものであって、回転座標変換を行ってから所定の処理を行った後に静止座標変換を行うのと等価の処理を行うことができ、かつ、線形性および時不変性を有する信号処理装置を提供することをその目的としている。
【課題を解決するための手段】
【0022】
上記課題を解決するため、本発明では、次の技術的手段を講じている。
【0023】
本発明の第1の側面によって提供される信号処理装置は、入力された信号のうち所定の角周波数の正弦波信号の位相を90度進ませるか90度遅らせる第1の処理手段と、入力された信号のうち前記所定の角周波数の正弦波信号の位相を90度遅らせるか90度進ませる第2の処理手段と、入力された信号のうち前記所定の角周波数の正弦波信号の位相を変化させない第3の処理手段とを備えていることを特徴とする。
【0024】
本発明の好ましい実施の形態においては、第1の入力信号と第2の入力信号とを入力する入力手段と、前記第1の入力信号を前記第3の処理手段によって信号処理し、前記第2の入力信号を前記第1の処理手段によって信号処理し、両者を加算した第3の信号を生成する第1の信号処理手段と、前記第1の入力信号を前記第2の処理手段によって信号処理し、前記第2の入力信号を前記第3の処理手段によって信号処理し、両者を加算した第4の信号を生成する第2の信号処理手段と、前記第3の信号と前記第4の信号とを出力する出力手段とを備えている。
【0025】
本発明の好ましい実施の形態においては、所定の伝達関数をF(s)とし、前記所定の角周波数をω0、虚数単位をjとした場合、
【数5】
【0026】
本発明の好ましい実施の形態においては、前記所定の伝達関数がF(s)=KI/s(但し、KIは積分ゲイン)であって、
【数6】
【0027】
本発明の好ましい実施の形態においては、前記所定の伝達関数がF(s)=KP+KI/s(但し、KPおよびKIは、それぞれ比例ゲインおよび積分ゲイン)であって、
【数7】
【0028】
本発明の好ましい実施の形態においては、前記所定の伝達関数がF(s)=1/(T・s+1)(但し、Tは、時定数)であって、
【数8】
【0029】
本発明の好ましい実施の形態においては、前記所定の伝達関数がF(s)=T・s/(T・s+1)(但し、Tは、時定数)であって、
【数9】
【0030】
本発明の第2の側面によって提供される信号処理装置は、入力された信号のうち所定の角周波数の正弦波信号の位相を120度進ませるか120度遅らせる第1の処理手段と、入力された信号のうち前記所定の角周波数の正弦波信号の位相を120度遅らせるか120度進ませる第2の処理手段と、入力された信号のうち前記所定の角周波数の正弦波信号の位相を変化させない第3の処理手段とを備えていることを特徴とする。
【0031】
本発明の好ましい実施の形態においては、第1の入力信号、第2の入力信号、および第3の入力信号を入力する入力手段と、
前記第1の入力信号を前記第3の処理手段によって信号処理し、前記第2の入力信号を前記第1の処理手段によって信号処理し、前記第3の入力信号を前記第2の処理手段によって信号処理し、これらを加算した第4の信号を生成する第1の信号処理手段と、
前記第1の入力信号を前記第2の処理手段によって信号処理し、前記第2の入力信号を前記第3の処理手段によって信号処理し、前記第3の入力信号を前記第1の処理手段によって信号処理し、これらを加算した第5の信号を生成する第2の信号処理手段と、
前記第1の入力信号を前記第1の処理手段によって信号処理し、前記第2の入力信号を前記第2の処理手段によって信号処理し、前記第3の入力信号を前記第3の処理手段によって信号処理し、これらを加算した第6の信号を生成する第3の信号処理手段と、
前記第4の信号、前記第5の信号、および前記第6の信号を出力する出力手段と、
を備えている。
【0032】
本発明の好ましい実施の形態においては、所定の伝達関数をF(s)とし、前記所定の角周波数をω0、虚数単位をjとした場合、
【数10】
本発明の第3の側面によって提供される信号処理方法は、第1の入力信号と第2の入力信号とを入力する第1の工程と、前記第1の入力信号に第3の伝達関数で表される信号処理を行い、前記第2の入力信号に第1の伝達関数で表される信号処理を行い、両者を加算した第3の信号を生成する第2の工程と、前記第1の入力信号に前記第2の伝達関数で表される信号処理を行い、前記第2の入力信号に前記第3の伝達関数で表される信号処理を行い、両者を加算した第4の信号を生成する第3の工程と、前記第3の信号と前記第4の信号とを出力する第4の工程とを備えており、
【数11】
【発明の効果】
【0033】
本発明によれば、入力された信号のうち所定の角周波数の正弦波信号の位相を90度進ませ、90度遅らせ、または、そのままとする処理を行っている。これらの処理は線形性および時不変性を有する。入力された信号にこれらの処理を行ったものを加算して出力する場合、全体としても線形性および時不変性を有する。そして、伝達関数F(s)を用いた上記伝達関数G1(s)、G2(s)、G3(s)を用いた場合、回転座標変換を行ってから伝達関数F(s)で表される処理を行った後に静止座標変換を行うのと等価の処理を行うことができる。また、全体として線形性および時不変性を有するので、線形制御理論に基づいた設計法を用いることができ、制御系の設計を容易にすることができる。また、システム解析も行うことができる。
【0034】
本発明のその他の特徴および利点は、添付図面を参照して以下に行う詳細な説明によって、より明らかとなろう。
【図面の簡単な説明】
【0035】
【図1】回転座標変換および静止座標変換を伴う処理を線形時不変の処理に変換する方法について説明するためのブロック線図である。
【図2】回転座標変換および静止座標変換を伴う処理を線形時不変の処理に変換する方法について説明するためのブロック線図であり、行列で表したものである。
【図3】行列の計算を説明するためのブロック線図である。
【図4】回転座標変換を行ってからPI制御を行った後に静止座標変換を行う処理を示すブロック線図である。
【図5】第1実施形態に係る系統連系インバータシステムを説明するためのブロック図である。
【図6】行列GPIの各要素である伝達関数を解析するためのボード線図である。
【図7】第2実施形態に係る制御回路を説明するためのブロック図である。
【図8】回転座標変換を行ってからI制御を行った後に静止座標変換を行う処理を示すブロック線図である。
【図9】行列GIの各要素である伝達関数を解析するためのボード線図である。
【図10】回転座標変換を行ってからフィルタ処理を行った後に静止座標変換を行う処理を示すブロック線図である。
【図11】行列GLPFの各要素である伝達関数を解析するためのボード線図である。
【図12】行列GHPFの各要素である伝達関数を解析するためのボード線図である。
【図13】従来の一般的な系統連系インバータシステムを説明するためのブロック図である。
【図14】制御回路の内部構成を説明するためのブロック図である。
【発明を実施するための形態】
【0036】
以下、本発明の実施の形態を、図面を参照して具体的に説明する。
【0037】
まず、回転座標変換および静止座標変換を伴う処理を線形時不変の処理に変換する方法について説明する。
【0038】
図1(a)は、回転座標変換および静止座標変換を伴う処理を説明するための図である。当該処理では、まず、信号αおよびβが、回転座標変換によって、信号dおよびqに変換される。信号dおよびqに対して、それぞれ所定の伝達関数F(s)で表される処理が行われ、信号d’およびq’が出力される。次に、信号d’およびq’が静止座標変換によって、信号α’およびβ’に変換される。図1(a)に示す非線形時変の処理を、図1(b)に示す線形時不変の伝達関数の行列Gを用いた処理に変換する。
【0039】
図1(a)に示す回転座標変換は下記(5)式の行列式で表され、静止座標変換は下記(6)式の行列式で表される。
【数12】
【0040】
したがって、図1(a)に示す処理を、行列を用いて、図2(a)のように表すことができる。図2(a)に示す3つの行列の積を計算し、算出された行列を線形時不変の行列にすることで、図1(b)に示す行列Gを算出することができる。このとき、静止座標変換および回転座標変換の行列を行列の積に変換したうえで、算出を行う。
【0041】
回転座標変換の行列は、下記(7)式に示す右辺の行列の積に変換することができる。
【数13】
但し、jは虚数単位であり、exp()は自然対数の底eの指数関数であり、
【数14】
である。なお、T-1は、Tの逆行列である。
【0042】
【数15】
となり、オイラーの公式より、exp(jθ)=cosθ+jsinθ、exp(−jθ)=cosθ−jsinθを代入して計算すると、
【数16】
であることが、確認できる。
【0043】
また、静止座標変換の行列は、下記(8)式に示す右辺の行列の積に変換することができる。
【数17】
但し、jは虚数単位であり、exp()は自然対数の底eの指数関数であり、
【数18】
である。なお、T-1は、Tの逆行列である。
【0044】
【数19】
となり、オイラーの公式より、exp(jθ)=cosθ+jsinθ、exp(−jθ)=cosθ−jsinθを代入して計算すると、
【数20】
であることが、確認できる。
【0045】
上記(7)式および(8)式を用いて、図2(a)に示す3つの行列の積を計算して、行列Gを算出すると、下記(9)式のように計算される。
【数21】
【0046】
上記(9)式の中央の3つの行列の1行1列目の要素に注目し、これをブロック線図で表すと、図3に示すブロック線図になる。図3に示すブロック線図の入出力特性を計算すると、
【数22】
となる。ただし、F(s)はインパルス応答f(t)をもつ一入力一出力伝達関数である 。
【0047】
ここで、θ(t)=ω0tとすると、θ(t)−θ(τ)=ω0t−ω0τ=ω0(t−τ)=θ(t−τ)となるので、図3に示すブロック線図の入出力特性は、インパルス応答f(t)exp(−jω0t)を持つ線形時不変系のものに等しい。インパルス応答f(t)exp(−jω0t)をラプラス変換すると、伝達関数F(s+jω0)が得られる。また、図3に示すブロック線図のexp(jθ(t))とexp(−jθ(t))とを入れ換えた場合の入出力特性は、伝達関数F(s−jω0)の入出力特性になる。
【0048】
したがって、上記(9)式からさらに計算を進めると、
【数23】
と計算される。
【0049】
これにより、図2(a)に示す処理を、図2(b)に示す処理に変換することができる。図2(b)に示す処理は、回転座標変換を行ってから所定の伝達関数F(s)で表される処理を行った後に静止座標変換を行う処理と等価の処理であって、当該処理のシステムは線形時不変のシステムである。
【0050】
PI制御(比例積分制御)コントローラの伝達関数は、比例ゲインおよび積分ゲインをそれぞれKPおよびKIとすると、F(s)=KP+KI/sで表される。したがって、図4に示す処理、すなわち、回転座標変換を行ってからPI制御を行った後に静止座標変換を行う処理と等価の処理を示す伝達関数の行列GPIは、上記(10)式を用いて、下記(11)式のように算出される。
【数24】
【0051】
以下に、上記(11)式の伝達関数の行列GPIで表される処理を行う信号処理装置を系統連系インバータシステムに適用した場合を、本発明の第1実施形態として説明する。
【0052】
図5は、第1実施形態に係る系統連系インバータシステムを説明するためのブロック図である。
【0053】
同図に示すように、系統連系インバータシステムAは、直流電源1、インバータ回路2、フィルタ回路3、変圧回路4、電流センサ5、電圧センサ6、および制御回路7を備えている。
【0054】
直流電源1は、インバータ回路2に接続している。インバータ回路2、フィルタ回路3、および変圧回路4は、この順で、U相、V相、W相の出力電圧の出力ラインに直列に接続されて、三相交流の電力系統B(以下、「系統B」と略称する。)に接続している。電流センサ5および電圧センサ6は、変圧回路4の出力側に設置されている。制御回路7は、インバータ回路2に接続されている。系統連系インバータシステムAは、直流電源1が出力する直流電力を交流電力に変換して系統Bに供給する。なお、系統連系インバータシステムAの構成は、これに限られない。例えば、電流センサ5および電圧センサ6を変圧回路4の入力側に設けてもよいし、インバータ回路2の制御に必要な他のセンサを設けていてもよい。また、変圧回路4をフィルタ回路3の入力側に設けるようにしてもよいし、変圧回路4を設けない、いわゆるトランスレス方式にしてもよい。また、直流電源1とインバータ回路2との間にDC/DCコンバータ回路を設けるようにしてもよい。
【0055】
直流電源1は、直流電力を出力するものであり、例えば太陽電池を備えている。太陽電池は、太陽光エネルギーを電気エネルギーに変換することで、直流電力を生成する。直流電源1は、生成された直流電力を、インバータ回路2に出力する。なお、直流電源1は、太陽電池により直流電力を生成するものに限定されない。例えば、直流電源1は、燃料電池、蓄電池、電気二重層コンデンサやリチウムイオン電池であってもよいし、ディーゼルエンジン発電機、マイクロガスタービン発電機や風力タービン発電機などにより生成された交流電力を直流電力に変換して出力する装置であってもよい。
【0056】
インバータ回路2は、直流電源1から入力される直流電圧を交流電圧に変換して、フィルタ回路3に出力するものである。インバータ回路2は、三相インバータであり、図示しない3組6個のスイッチング素子を備えたPWM制御型インバータ回路である。インバータ回路2は、制御回路7から入力されるPWM信号に基づいて、各スイッチング素子のオンとオフとを切り替えることで、直流電源1から入力される直流電圧を交流電圧に変換する。なお、インバータ回路2はこれに限定されず、例えば、マルチレベルインバータであってもよい。
【0057】
フィルタ回路3は、インバータ回路2から入力される交流電圧から、スイッチングによる高周波成分を除去するものである。フィルタ回路3は、リアクトルとコンデンサとからなるローパスフィルタを備えている。フィルタ回路3で高周波成分を除去された交流電圧は、変圧回路4に出力される。なお、フィルタ回路3の構成はこれに限定されず、高周波成分を除去するための周知のフィルタ回路であればよい。変圧回路4は、フィルタ回路3から出力される交流電圧を系統Bの電圧(以下では、「系統電圧」という。)とほぼ同一のレベルに昇圧または降圧する。
【0058】
電流センサ5は、変圧回路4から出力される各相の交流電流(すなわち、系統連系インバータシステムAの出力電流)を検出するものである。検出された交流電流信号I(Iu,Iv,Iw)は、制御回路7に入力される。電圧センサ6は、系統Bの各相の系統電圧を検出するものである。検出された系統電圧信号Vs(Vsu,Vsv,Vsw)は、制御回路7に入力される。
【0059】
制御回路7は、インバータ回路2を制御するものであり、例えばマイクロコンピュータなどによって実現されている。制御回路7は、電流センサ5から入力される交流電流信号I、および、電圧センサ6から入力される系統電圧信号Vsに基づいて、PWM信号を生成してインバータ回路2に出力する。制御回路7は、系統連系インバータシステムAが出力する出力電圧の波形を指令するための指令値信号を各センサから入力される検出信号に基づいて生成し、当該指令値信号に基づいて生成されるパルス信号をPWM信号として出力する。インバータ回路2は、入力されるPWM信号に基づいて各スイッチング素子のオンとオフとを切り替えることで、指令値信号に対応した波形の交流電圧を出力する。制御回路7は、指令値信号の波形を変化させて系統連系インバータシステムAの出力電圧の波形を変化させることで、出力電流を制御している。これにより、制御回路7は、各種フィードバック制御を行っている。
【0060】
図5においては、出力電流制御を行うための構成のみを記載して、その他の制御のための構成を省略している。実際には、制御回路7は、直流電圧制御(入力直流電圧が予め設定された電圧目標値となるように行うフィードバック制御)や無効電力制御(出力無効電力が予め設定された無効電力目標値となるように行うフィードバック制御)なども行っている。なお、制御回路7が行う制御の手法は、これに限られない。例えば、出力電圧制御や有効電力制御を行うようにしてもよい。
【0061】
制御回路7は、系統対抗分生成部72、三相/二相変換部73、電流コントローラ74、二相/三相変換部76、およびPWM信号生成部77を備えている。
【0062】
系統対抗分生成部72は、電圧センサ6から系統電圧信号Vsを入力されて、系統指令値信号Ku,Kv,Kwを生成して出力する。系統指令値信号Ku,Kv,Kwは系統連系インバータシステムAが出力する出力電圧の波形を指令するための指令値信号の基準となるものであり、系統指令値信号Ku,Kv,Kwが後述する補正値信号Xu,Xv,Xwで補正されることにより指令値信号が生成される。
【0063】
三相/二相変換部73は、図14に示す三相/二相変換部73と同じものであり、電流センサ5より入力される3つの電流信号Iu,Iv,Iwを、α軸電流信号Iαおよびβ軸電流信号Iβに変換するものである。三相/二相変換部73で行われる変換処理は、上記(1)式に示す行列式で表される。
【0064】
電流コントローラ74は、三相/二相変換部73より出力されるα軸電流信号Iαおよびβ軸電流信号Iβとそれぞれの目標値との偏差を入力され、電流制御のための補正値信号Xα,Xβを出力するものである。電流コントローラ74は、上記(11)式の伝達関数の行列GPIで表される処理を行う。つまり、α軸電流信号Iαおよびβ軸電流信号Iβとそれぞれの目標値との偏差をそれぞれΔIαおよびΔIβとすると、下記(12)式に示す処理を行っている。角周波数ω0は系統電圧の基本波の角周波数(例えば、ω0=120π[rad/sec](60[Hz]))があらかじめ設定されている。また、比例ゲインKPおよび積分ゲインKIは、あらかじめ設計されている。
【数25】
【0065】
本実施形態において、α軸電流目標値およびβ軸電流目標値には、d軸電流目標値およびq軸電流目標値を静止座標変換したものが用いられる。d軸電流目標値には図示しない直流電圧制御のための補正値が用いられ、q軸電流目標値には、図示しない無効電力制御のための補正値が用いられる。なお、三相の電流目標値が与えられる場合は、当該目標値を三相/二相変換して、α軸電流目標値およびβ軸電流目標値とすればよい。また、α軸電流目標値およびβ軸電流目標値が直接与えられる場合は、当該目標値をそのまま用いればよい。
【0066】
図6は、行列GPIの各要素である伝達関数を解析するためのボード線図である。同図(a)は行列GPIの1行1列要素(以下では、「(1,1)要素」と記載する。他の要素についても同様に記載する。)および(2,2)要素の伝達関数を示しており、同図(b)は行列GPIの(1,2)要素の伝達関数を示しており、同図(c)は行列GPIの(2,1)要素の伝達関数を示している。同図は、系統電圧の基本波の周波数(以下では、「中心周波数」とする。また、中心周波数に対応する角周波数を「中心角周波数」とする。)が60Hzの場合(すなわち、角周波数ω0=120πの場合)のものであり、積分ゲインKIを1に固定して、比例ゲインKPを「0.1」,「1」,「10」,「100」とした場合を示している。
【0067】
同図(a)が示す振幅特性は中心周波数にピークがあり、比例ゲインKPが大きくなると、中心周波数以外の振幅特性が大きくなっている。また、位相特性は、中心周波数で0度になる。つまり、行列GPIの(1,1)要素および(2,2)要素の伝達関数は、中心周波数(中心角周波数)の信号を位相を変化させることなく通過させる。なお、電流コントローラ74のうち行列GPIの(1,1)要素および(2,2)要素に対応する部分が、本発明の「第3の処理手段」に相当する。
【0068】
同図(b)および(c)が示す振幅特性も、中心周波数にピークがある。また、振幅特性および位相特性は、比例ゲインKPに関係なく一定である。また、同図(b)が示す位相特性は、中心周波数で90度になる。つまり、行列GPIの(1,2)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度進めて通過させる。一方、同図(c)が示す位相特性は、中心周波数で−90度になる。つまり、行列GPIの(2,1)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度遅らせて通過させる。なお、電流コントローラ74のうち行列GPIの(1,2)要素に対応する部分が、本発明の「第1の処理手段」に相当し、(2,1)要素に対応する部分が、本発明の「第2の処理手段」に相当する。
【0069】
二相/三相変換部76は、図14に示す二相/三相変換部76と同じものであり、電流コントローラ74から入力される補正値信号Xα,Xβを、3つの補正値信号Xu,Xv,Xwに変換するものである。二相/三相変換部76で行われる変換処理は、上記(4)式に示す行列式で表される。
【0070】
系統対抗分生成部72が出力する系統指令値信号Ku,Kv,Kwと、二相/三相変換部76が出力する補正値信号Xu,Xv,Xwとがそれぞれ加算されて、指令値信号X’u,X’v,X’wが算出され、PWM信号生成部77に入力される。
【0071】
PWM信号生成部77は、入力される指令値信号X’u,X’v,X’wと、所定の周波数(例えば、4kHz)の三角波信号として生成されたキャリア信号とに基づいて、三角波比較法によりPWM信号Pu,Pv,Pwを生成する。三角波比較法では、指令値信号X’u,X’v,X’wとキャリア信号とがそれぞれ比較され、例えば、指令値信号X’uがキャリア信号より大きい場合にハイレベルとなり、小さい場合にローレベルとなるパルス信号がPWM信号Puとして生成される。生成されたPWM信号Pu,Pv,Pwは、インバータ回路2に出力される。
【0072】
本実施形態において、制御回路7は、回転座標変換および静止座標変換を行うことなく、静止座標系で制御を行っている。上述したように、伝達関数の行列GPIは、回転座標変換を行ってからPI制御を行った後に静止座標変換を行う処理と等価の処理を示す伝達関数の行列である。したがって、伝達関数の行列GPIで表される処理を行う電流コントローラ74は、図14に示す回転座標変換部78、静止座標変換部79、PI制御部74bおよび75bで行われる処理と等価の処理を行っている。また、図6の各ボード線図が示すように、行列GPIの各要素の伝達関数の振幅特性は、中心周波数でピークを形成している。つまり、電流コントローラ74は、中心周波数成分だけがハイゲインになっている。したがって、図14に示すLPF74aおよび75aを設ける必要がない。
【0073】
また、電流コントローラ74で行われる処理は、伝達関数の行列GPIで示されるので、線形時不変の処理である。また、制御回路7には非線形時変処理である回転座標変換処理および静止座標変換処理が含まれておらず、電流制御システム全体が線形時不変システムになっている。したがって、線形制御理論を用いた制御系設計やシステム解析が可能となる。
【0074】
このように、上記(10)式に示す行列を用いることで、パワーエレクトロニクスの分野で多く用いられてきた回転座標変換を行ってから伝達関数F(s)で表される処理を行った後に静止座標変換を行う非線形の処理を、線形時不変の多入出力系へ帰着させることができ、これによりシステム解析や制御系設計が容易になる。
【0075】
なお、上記実施形態においては、電流コントローラ74で上記(12)式に示す処理を行っているが、行列GPIの各要素の比例ゲインKPおよび積分ゲインKIに要素毎に異なる値を用いるようにしてもよい。すなわち、各要素である伝達関数毎に異なる比例ゲインKPおよび積分ゲインKIを設計して用いるようにしてもよい。この場合でも、各要素である伝達関数の位相特性は変化しない。したがって、(1,1)要素および(2,2)要素の伝達関数は中心周波数の信号を位相を変化させることなく通過させ、(1,2)要素の伝達関数は中心周波数の信号の位相を90度進めて通過させ、(2,1)要素の伝達関数は中心周波数の信号の位相を90度遅らせて通過させることができる。
【0076】
上記実施形態においては、3つの電流信号Iu,Iv,Iwをα軸電流信号Iαおよびβ軸電流信号Iβに変換して制御する場合について説明したが、これに限られない。例えば、3つの電流信号Iu,Iv,Iwを用いて直接制御するようにしてもよい。以下に、この場合の実施形態を第2実施形態として説明する。
【0077】
図7は、第2実施形態に係る制御回路を説明するためのブロック図である。同図において、図5に示す制御回路7と同一または類似の要素には、同一の符号を付している。
【0078】
図7に示す制御回路7’は、三相/二相変換部73および二相/三相変換部76を備えておらず、電流コントローラ74’が3つの電流信号Iu,Iv,Iwを用いて直接制御を行う点で、第1実施形態に係る制御回路7と異なる(図5参照)。
【0079】
三相/二相変換および二相/三相変換は、上記(1)式および(4)式で表されるので、三相/二相変換を行ってから伝達関数の行列Gで表される処理を行った後に二相/三相変換を行う処理は、下記(13)式に示す伝達関数の行列G’で表される。
【数26】
【0080】
したがって、電流コントローラ74’が行う処理を表す伝達関数の行列G’PIは、下記(14)式で表される。
【数27】
【0081】
電流コントローラ74’は、電流センサ5より出力される3つの電流信号Iu,Iv,Iwとそれぞれの目標値との偏差を入力され、電流制御のための補正値信号Xu,Xv,Xwを出力するものである。電流コントローラ74’は、上記(14)式の伝達関数の行列G’PIで表される処理を行う。つまり、電流信号Iu,Iv,Iwとそれぞれの目標値との偏差をそれぞれΔIu,ΔIv,ΔIwとすると、下記(15)式に示す処理を行っている。
【数28】
【0082】
本実施形態において、電流信号Iu,Iv,Iwの目標値には、d軸電流目標値およびq軸電流目標値を静止座標変換してさらに二相/三相変換したものが用いられる。なお、三相の電流目標値が直接与えられる場合は、当該目標値をそのまま用いればよい。また、α軸電流目標値およびβ軸電流目標値が与えられる場合は、二相/三相変換したものを用いればよい。
【0083】
本実施形態において、伝達関数の行列G’PIで表される処理を行う電流コントローラ74’は、図14に示す三相/二相変換部73、二相/三相変換部76、回転座標変換部78、静止座標変換部79、PI制御部74bおよび75bで行われる処理と等価の処理を行っている。また、電流コントローラ74’で行われる処理は、伝達関数の行列G’PIで示されるので、線形時不変の処理である。したがって、電流制御システム全体が線形時不変システムになっているので、線形制御理論を用いた制御系設計やシステム解析が可能となる。
【0084】
上記第1および第2実施形態においては、電流コントローラ74(74’)がPI制御を行う場合について説明したがこれに限られない。例えば、I制御(積分制御)を行うようにしてもよい。
【0085】
I制御コントローラの伝達関数は、積分ゲインをKIとすると、F(s)=KI/sで表される。したがって、図8に示す処理、すなわち、回転座標変換を行ってからI制御を行った後に静止座標変換を行う処理と等価の処理を示す伝達関数の行列GIは、上記(10)式を用いて、下記(16)式のように算出される。
【数29】
【0086】
したがって、電流コントローラ74(74’)がI制御を行うようにする場合は、上記(16)式に示される伝達関数の行列GIを用いればよい。
【0087】
図9は、行列GIの各要素である伝達関数を解析するためのボード線図である。同図(a)は行列GIの(1,1)要素および(2,2)要素の伝達関数を示しており、同図(b)は行列GIの(1,2)要素の伝達関数を示しており、同図(c)は行列GIの(2,1)要素の伝達関数を示している。同図は、中心周波数が60Hzの場合のものであり、積分ゲインKIを「0.1」,「1」,「10」,「100」とした場合を示している。
【0088】
同図(a),(b)および(c)が示す振幅特性は、いずれも、中心周波数にピークがあり、積分ゲインKIが大きくなると、振幅特性が大きくなっている。また、同図(a)が示す位相特性は、中心周波数で0度になる。つまり、行列GIの(1,1)要素および(2,2)要素の伝達関数は、中心周波数(中心角周波数)の信号を位相を変化させることなく通過させる。同図(b)が示す位相特性は、中心周波数で90度になる。つまり、行列GIの(1,2)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度進めて通過させる。一方、同図(c)が示す位相特性は、中心周波数で−90度になる。つまり、行列GIの(2,1)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度遅らせて通過させる。
【0089】
上記第1および第2実施形態においては、電流信号Iu,Iv,Iwの基本波成分(正相分)の制御を行う場合について説明したが、これに限られない。電流信号Iu,Iv,Iwの逆相分の制御を行うようにしてもよい。
【0090】
三相/二相変換部73(図5参照)から出力されるα軸電流信号Iαの中心周波数成分は、β軸電流信号Iβの中心周波数成分より90度位相が進んでいる。したがって、目標値との偏差ΔIαの中心周波数成分もΔIβの中心周波数成分より90度位相が進んでいる。偏差ΔIαに行列GPIの(1,1)要素の伝達関数に示す処理を行うと、中心周波数成分の位相は変化しない(図6(a)参照)。また、偏差ΔIβに行列GPIの(1,2)要素の伝達関数に示す処理を行うと、中心周波数成分の位相が90度進む(図6(b)参照)。したがって、両者の位相が偏差ΔIαの中心周波数成分と同じ位相になるので、両者を加算することで強め合うことになる。一方、偏差ΔIαに行列GPIの(2,1)要素の伝達関数に示す処理を行うと、中心周波数成分の位相が90度遅れる(図6(c)参照)。また、偏差ΔIβに行列GPIの(2,2)要素の伝達関数に示す処理を行うと、中心周波数成分の位相は変化しない。したがって、両者の位相が偏差ΔIβの中心周波数成分と同じ位相になるので、両者を加算することで強め合うことになる。
【0091】
逆相分は相順が正相分とは逆方向になっている成分である。したがって、三相/二相変換部73より出力されるβ軸電流信号Iβにおいて、正相分とは位相が180度異なる成分として含まれている。偏差ΔIβに行列GPIの(1,2)要素の伝達関数に示す処理を行うと、逆相分の位相も90度進んで、偏差ΔIαの中心周波数成分と逆位相になり、打ち消し合うことになる。また、偏差ΔIαに行列GPIの(2,1)要素の伝達関数に示す処理を行うと位相が90度遅れて、偏差ΔIβの逆相分と逆位相になり、打ち消し合うことになる。したがって、電流コントローラ74は、正相分の制御を行ない、逆相分の制御は行なわない。
【0092】
伝達関数の行列GPIの(1,2)要素と(2,1)要素とを入れ換えた場合、上記とは逆に、正相分が打ち消しあって、逆相成分が強めあうことになる。したがって、第1実施形態において逆相分の制御を行う場合には、伝達関数の行列GPI(GI)の(1,2)要素と(2,1)要素とを入れ換えた行列を用いればよい。また、第2実施形態において逆相分の制御を行う場合には、伝達関数の行列G’PIの要素の内、GPI12(s)、GPI23(s)およびGPI31(s)と、GPI13(s)、GPI21(s)およびGPI32(s)とを入れ換えた行列(すなわち、行列G’PIの転置行列)を用いればよい。I制御の場合は伝達関数の行列を記載していないが、PI制御の場合と同様である。
【0093】
上記第1および第2実施形態においては、本発明に係る信号処理装置をPI制御(I制御)に用いた場合について説明したが、本発明の適用範囲はこれに限られない。本発明は、回転座標変換を行ってから所定の処理を行った後に静止座標変換を行うのと等価の処理を行う信号処理装置であり、所定の処理が線形時不変の処理であれば、信号処理装置全体として線形時不変とすることができる。したがって、例えば、所定の処理をD制御(微分制御:伝達関数は、微分ゲインをKDとすると、F(s)=KD・sで表される。)、P制御(比例制御:伝達関数は、比例ゲインをKPとすると、F(s)=KPで表される。)、PD制御、ID制御、PID制御などとした場合にも、本発明を適用することができる。また、例えば、所定の処理をフィルタ処理とした場合などにも、本発明を適用することができる。
【0094】
ローパスフィルタの伝達関数は、時定数をTとすると、F(s)=1/(Ts+1)で表される。したがって、図10(a)に示す処理、すなわち、回転座標変換を行ってからローパスフィルタ処理を行った後に静止座標変換を行う処理と等価の処理を示す伝達関数の行列GLPFは、上記(10)式を用いて、下記(17)式のように算出される。
【数30】
【0095】
図11は、行列GLPFの各要素である伝達関数を解析するためのボード線図である。同図(a)は行列GLPFの(1,1)要素および(2,2)要素の伝達関数を示しており、同図(b)は行列GLPFの(1,2)要素の伝達関数を示しており、同図(c)は行列GLPFの(2,1)要素の伝達関数を示している。同図は、中心角周波数が60Hzの場合のものであり、時定数Tを「0.1」,「1」,「10」,「100」とした場合を示している。
【0096】
同図(a),(b)および(c)が示す振幅特性は、いずれも、中心周波数にピークがあり、時定数Tが大きくなると、通過帯域が小さくなっている。また、同図(a)が示す位相特性は、中心周波数で0度になる。つまり、行列GLPFの(1,1)要素および(2,2)要素の伝達関数は、中心周波数(中心角周波数)の信号を位相を変化させることなく通過させる。同図(b)が示す位相特性は、中心周波数で90度になる。つまり、行列GLPFの(1,2)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度進めて通過させる。一方、同図(c)が示す位相特性は、中心周波数で−90度になる。つまり、行列GLPFの(2,1)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度遅らせて通過させる。
【0097】
また、図11(a),(b)および(c)が示す振幅特性のピークは、−6dB(=1/2)である。三相/二相変換後の2つの信号αとβ(αの中心周波数成分の位相がβの中心周波数成分の位相より90度進んでいるとする)に対する伝達関数の行列GLPFに示す処理を考える。信号αに行列GLPFの(1,1)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相が変化しない(図11(a)参照)。また、信号βに行列GLPFの(1,2)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相が90度進む(図11(b)参照)。したがって、両者を加算することで、信号αの中心周波数成分が抽出できる。一方、信号αに行列GLPFの(2,1)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相が90度遅れる(図11(c)参照)。また、信号βに行列GLPFの(2,2)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相は変化しない。したがって、両者を加算することで、信号βの中心周波数成分が抽出できる。つまり、伝達関数の行列GLPFに示す処理は、信号αとβから中心周波数成分を抽出するものである。
【0098】
信号βに行列GLPFの(1,2)要素の伝達関数に示す処理を行うと、逆相分の位相も90度進んで、信号αの逆相分と逆位相になり、打ち消し合うことになる。また、信号αに行列GLPFの(2,1)要素の伝達関数に示す処理を行うと、逆相分の位相も90度遅れて、信号βの逆相分と逆位相になり、打ち消し合うことになる。したがって、伝達関数の行列GLPFに示す処理は、逆相分を遮断する。
【0099】
なお、中心周波数成分(正相分)ではなく、逆相分を抽出する場合には、伝達関数の行列GLPFの(1,2)要素と(2,1)要素とを入れ換えた行列を用いればよい。
【0100】
ハイパスフィルタの伝達関数は、時定数をTとすると、F(s)=Ts/(Ts+1)で表される。したがって、図10(b)に示す処理、すなわち、回転座標変換を行ってからハイパスフィルタ処理を行った後に静止座標変換を行う処理と等価の処理を示す伝達関数の行列GHPFは、上記(10)式を用いて、下記(18)式のように算出される。
【数31】
【0101】
図12は、行列GHPFの各要素である伝達関数を解析するためのボード線図である。同図(a)は行列GHPFの(1,1)要素および(2,2)要素の伝達関数を示しており、同図(b)は行列GHPFの(1,2)要素の伝達関数を示しており、同図(c)は行列GHPFの(2,1)要素の伝達関数を示している。同図は、中心角周波数が60Hzの場合のものであり、時定数Tを「0.1」,「1」,「10」,「100」とした場合を示している。
【0102】
同図(a)が示す振幅特性は、中心周波数のみが減衰している。また、時定数Tが大きくなると、遮断帯域が小さくなっている。同図(b)および(c)が示す振幅特性は、いずれも、中心周波数にピークがあり、時定数Tが大きくなると、通過帯域が小さくなっている。また、同図(a)が示す位相特性は、中心周波数で0度になる。つまり、行列GHPFの(1,1)要素および(2,2)要素の伝達関数は、中心周波数(中心角周波数)の信号を位相を変化させることなく通過させる。同図(b)が示す位相特性は、中心周波数で−90度になる。つまり、行列GHPFの(1,2)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度遅らせて通過させる。一方、同図(c)が示す位相特性は、中心周波数で90度になる。つまり、行列GHPFの(2,1)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度進めて通過させる。
【0103】
図12(b)および(c)が示す振幅特性のピークは、−6dB(=1/2)である。また、図12(a)が示す振幅特性も、中心周波数で−6dB(=1/2)である。三相/二相変換後の2つの信号αとβ(αの中心周波数成分の位相がβの中心周波数成分の位相より90度進んでいるとする)に対する伝達関数の行列GHPFに示す処理を考える。信号αに行列GHPFの(1,1)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相が変化せず、他の成分はそのまま通過する(図12(a)参照)。また、信号βに行列GHPFの(1,2)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相が90度遅れる(図12(b)参照)。したがって、両者を加算すると中心周波数成分が打ち消しあうので、信号αの中心周波数成分だけが除去される。一方、信号αに行列GHPFの(2,1)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相が90度進む(図12(c)参照)。また、信号βに行列GHPFの(2,2)要素の伝達関数に示す処理を行うと、中心周波数成分の振幅が半分になって位相は変化せず、他の成分はそのまま通過する。したがって、両者を加算すると中心周波数成分が打ち消しあうので、信号βの中心周波数成分だけが除去される。つまり、伝達関数の行列GHPFに示す処理は、信号αとβから中心周波数成分だけを除去するものであり、ノッチフィルタの特性を有する。
【0104】
信号βに行列GHPFの(1,2)要素の伝達関数に示す処理を行うと、逆相分の位相も90度遅れて、信号αの逆相分と同位相になり、強め合うことになる。また、信号αに行列GHPFの(2,1)要素の伝達関数に示す処理を行うと位相が90度進んで、信号βの逆相分と同位相になり、強め合うことになる。したがって、伝達関数の行列GHPFに示す処理は、逆相分を通過させる。
【0105】
なお、中心周波数成分(正相分)ではなく、逆相分を遮断する場合には、伝達関数の行列GHPFの(1,2)要素と(2,1)要素とを入れ換えた行列を用いればよい。
【0106】
上記第1および第2実施形態においては、本発明に係る信号処理装置を系統連系インバータシステムに用いた場合について説明したが、これに限られない。本発明に係る信号処理装置は、どのようなシステムにおいても、用いることができる。すなわち、従来、回転座標変換を行って回転座標系で処理を行っていた信号処理を、本発明に係る信号処理装置の処理に置き換えることができる。例えば、アクティブフィルタや電動モータ、発電機、高周波電源、通信機器、画像処理装置、音響装置などの制御装置にも、本発明に係る信号処理装置を用いることができる。
【0107】
本発明に係る信号処理装置および信号処理方法は、上述した実施形態に限定されるものではない。本発明に係る信号処理装置および信号処理方法の各部の具体的な構成は、種々に設計変更自在である。
【符号の説明】
【0108】
A 系統連系インバータシステム
1 直流電源
2 インバータ回路
3 フィルタ回路
4 変圧回路
5 電流センサ
6 電圧センサ
7,7’ 制御回路
72 系統対抗分生成部
73 三相/二相変換部
74,74’ 電流コントローラ(信号処理装置)
76 二相/三相変換部
77 PWM信号生成部
B 電力系統
【特許請求の範囲】
【請求項1】
入力された信号のうち所定の角周波数の正弦波信号の位相を90度進ませるか90度遅らせる第1の処理手段と、
入力された信号のうち前記所定の角周波数の正弦波信号の位相を90度遅らせるか90度進ませる第2の処理手段と、
入力された信号のうち前記所定の角周波数の正弦波信号の位相を変化させない第3の処理手段と、
を備えていることを特徴とする信号処理装置。
【請求項2】
第1の入力信号と第2の入力信号とを入力する入力手段と、
前記第1の入力信号を前記第3の処理手段によって信号処理し、前記第2の入力信号を前記第1の処理手段によって信号処理し、両者を加算した第3の信号を生成する第1の信号処理手段と、
前記第1の入力信号を前記第2の処理手段によって信号処理し、前記第2の入力信号を前記第3の処理手段によって信号処理し、両者を加算した第4の信号を生成する第2の信号処理手段と、
前記第3の信号と前記第4の信号とを出力する出力手段と、
を備えている、請求項1に記載の信号処理装置。
【請求項3】
所定の伝達関数をF(s)とし、前記所定の角周波数をω0、虚数単位をjとした場合、
【数1】
請求項1または2に記載の信号処理装置。
【請求項4】
前記所定の伝達関数がF(s)=KI/s(但し、KIは積分ゲイン)であって、
【数2】
請求項3に記載の信号処理装置。
【請求項5】
前記所定の伝達関数がF(s)=KP+KI/s(但し、KPおよびKIは、それぞれ比例ゲインおよび積分ゲイン)であって、
【数3】
請求項3に記載の信号処理装置。
【請求項6】
前記所定の伝達関数がF(s)=1/(T・s+1)(但し、Tは、時定数)であって、
【数4】
請求項3に記載の信号処理装置。
【請求項7】
前記所定の伝達関数がF(s)=T・s/(T・s+1)(但し、Tは、時定数)であって、
【数5】
請求項3に記載の信号処理装置。
【請求項8】
入力された信号のうち所定の角周波数の正弦波信号の位相を120度進ませるか120度遅らせる第1の処理手段と、
入力された信号のうち前記所定の角周波数の正弦波信号の位相を120度遅らせるか120度進ませる第2の処理手段と、
入力された信号のうち前記所定の角周波数の正弦波信号の位相を変化させない第3の処理手段と、
を備えていることを特徴とする信号処理装置。
【請求項9】
第1の入力信号、第2の入力信号、および第3の入力信号を入力する入力手段と、
前記第1の入力信号を前記第3の処理手段によって信号処理し、前記第2の入力信号を前記第1の処理手段によって信号処理し、前記第3の入力信号を前記第2の処理手段によって信号処理し、これらを加算した第4の信号を生成する第1の信号処理手段と、
前記第1の入力信号を前記第2の処理手段によって信号処理し、前記第2の入力信号を前記第3の処理手段によって信号処理し、前記第3の入力信号を前記第1の処理手段によって信号処理し、これらを加算した第5の信号を生成する第2の信号処理手段と、
前記第1の入力信号を前記第1の処理手段によって信号処理し、前記第2の入力信号を前記第2の処理手段によって信号処理し、前記第3の入力信号を前記第3の処理手段によって信号処理し、これらを加算した第6の信号を生成する第3の信号処理手段と、
前記第4の信号、前記第5の信号、および前記第6の信号を出力する出力手段と、
を備えている、請求項8に記載の信号処理装置。
【請求項10】
所定の伝達関数をF(s)とし、前記所定の角周波数をω0、虚数単位をjとした場合、
【数6】
請求項8または9に記載の信号処理装置。
【請求項11】
第1の入力信号と第2の入力信号とを入力する第1の工程と、
前記第1の入力信号に第3の伝達関数で表される信号処理を行い、前記第2の入力信号に第1の伝達関数で表される信号処理を行い、両者を加算した第3の信号を生成する第2の工程と、
前記第1の入力信号に前記第2の伝達関数で表される信号処理を行い、前記第2の入力信号に前記第3の伝達関数で表される信号処理を行い、両者を加算した第4の信号を生成する第3の工程と、
前記第3の信号と前記第4の信号とを出力する第4の工程と、
を備えており、
【数7】
であることを特徴とする信号処理方法。
【請求項1】
入力された信号のうち所定の角周波数の正弦波信号の位相を90度進ませるか90度遅らせる第1の処理手段と、
入力された信号のうち前記所定の角周波数の正弦波信号の位相を90度遅らせるか90度進ませる第2の処理手段と、
入力された信号のうち前記所定の角周波数の正弦波信号の位相を変化させない第3の処理手段と、
を備えていることを特徴とする信号処理装置。
【請求項2】
第1の入力信号と第2の入力信号とを入力する入力手段と、
前記第1の入力信号を前記第3の処理手段によって信号処理し、前記第2の入力信号を前記第1の処理手段によって信号処理し、両者を加算した第3の信号を生成する第1の信号処理手段と、
前記第1の入力信号を前記第2の処理手段によって信号処理し、前記第2の入力信号を前記第3の処理手段によって信号処理し、両者を加算した第4の信号を生成する第2の信号処理手段と、
前記第3の信号と前記第4の信号とを出力する出力手段と、
を備えている、請求項1に記載の信号処理装置。
【請求項3】
所定の伝達関数をF(s)とし、前記所定の角周波数をω0、虚数単位をjとした場合、
【数1】
請求項1または2に記載の信号処理装置。
【請求項4】
前記所定の伝達関数がF(s)=KI/s(但し、KIは積分ゲイン)であって、
【数2】
請求項3に記載の信号処理装置。
【請求項5】
前記所定の伝達関数がF(s)=KP+KI/s(但し、KPおよびKIは、それぞれ比例ゲインおよび積分ゲイン)であって、
【数3】
請求項3に記載の信号処理装置。
【請求項6】
前記所定の伝達関数がF(s)=1/(T・s+1)(但し、Tは、時定数)であって、
【数4】
請求項3に記載の信号処理装置。
【請求項7】
前記所定の伝達関数がF(s)=T・s/(T・s+1)(但し、Tは、時定数)であって、
【数5】
請求項3に記載の信号処理装置。
【請求項8】
入力された信号のうち所定の角周波数の正弦波信号の位相を120度進ませるか120度遅らせる第1の処理手段と、
入力された信号のうち前記所定の角周波数の正弦波信号の位相を120度遅らせるか120度進ませる第2の処理手段と、
入力された信号のうち前記所定の角周波数の正弦波信号の位相を変化させない第3の処理手段と、
を備えていることを特徴とする信号処理装置。
【請求項9】
第1の入力信号、第2の入力信号、および第3の入力信号を入力する入力手段と、
前記第1の入力信号を前記第3の処理手段によって信号処理し、前記第2の入力信号を前記第1の処理手段によって信号処理し、前記第3の入力信号を前記第2の処理手段によって信号処理し、これらを加算した第4の信号を生成する第1の信号処理手段と、
前記第1の入力信号を前記第2の処理手段によって信号処理し、前記第2の入力信号を前記第3の処理手段によって信号処理し、前記第3の入力信号を前記第1の処理手段によって信号処理し、これらを加算した第5の信号を生成する第2の信号処理手段と、
前記第1の入力信号を前記第1の処理手段によって信号処理し、前記第2の入力信号を前記第2の処理手段によって信号処理し、前記第3の入力信号を前記第3の処理手段によって信号処理し、これらを加算した第6の信号を生成する第3の信号処理手段と、
前記第4の信号、前記第5の信号、および前記第6の信号を出力する出力手段と、
を備えている、請求項8に記載の信号処理装置。
【請求項10】
所定の伝達関数をF(s)とし、前記所定の角周波数をω0、虚数単位をjとした場合、
【数6】
請求項8または9に記載の信号処理装置。
【請求項11】
第1の入力信号と第2の入力信号とを入力する第1の工程と、
前記第1の入力信号に第3の伝達関数で表される信号処理を行い、前記第2の入力信号に第1の伝達関数で表される信号処理を行い、両者を加算した第3の信号を生成する第2の工程と、
前記第1の入力信号に前記第2の伝達関数で表される信号処理を行い、前記第2の入力信号に前記第3の伝達関数で表される信号処理を行い、両者を加算した第4の信号を生成する第3の工程と、
前記第3の信号と前記第4の信号とを出力する第4の工程と、
を備えており、
【数7】
であることを特徴とする信号処理方法。
【図1】

【図2】
【図3】

【図4】
【図5】
【図7】
【図8】
【図10】
【図13】
【図14】
【図6】
【図9】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図7】
【図8】
【図10】
【図13】
【図14】
【図6】
【図9】
【図11】
【図12】
【公開番号】特開2013−78180(P2013−78180A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−215737(P2011−215737)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
[ Back to top ]