
信号処理装置及び方法、記録媒体、並びにプログラム
【課題】 超音波診断装置のプローブに含まれる複数の振動子間の位置関係が固定されていなくても、簡単な構成で適切なビームフォーミングができるようにする。
【解決手段】 受信BF部は、相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の複数の振動子における反射波の信号の各位相差と、複数の振動子の配列が基準配列であると仮定した場合の複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、複数の振動子間の相対的な位置ずれを示す位相差を算出する。遅延計算部は、位相差算出部により算出された位相差に基づいて、ビームフォーミングで用いる、複数の振動子の各々の遅延量を計算する。本技術は、超音波診断装置に適用することができる。
【解決手段】 受信BF部は、相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の複数の振動子における反射波の信号の各位相差と、複数の振動子の配列が基準配列であると仮定した場合の複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、複数の振動子間の相対的な位置ずれを示す位相差を算出する。遅延計算部は、位相差算出部により算出された位相差に基づいて、ビームフォーミングで用いる、複数の振動子の各々の遅延量を計算する。本技術は、超音波診断装置に適用することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本技術は、信号処理装置及び方法、記録媒体、並びにプログラムに関し、特に、超音波診断装置のプローブに含まれる複数の振動子間の位置関係が固定されていなくても、簡単な構成で適切なビームフォーミングを可能にする、信号処理装置及び方法、記録媒体、並びにプログラムに関する。
【背景技術】
【0002】
従来、超音波診断装置は、プローブ内に含まれる複数の振動子から生体内に向けて送信した超音波の反射波を再びプローブで受信する。そして、超音波診断装置は、受信した反射波に処理を施すことによって、測定対象を画像化する。このとき、超音波診断装置では、ビームフォーミングが行われている。ビームフォーミングとは、各振動子が超音波を送受信するタイミングを、超音波の遅延量に基づいて個別に制御する処理である。
【0003】
プローブのなかには、各振動子の配置位置が固定されているものもある。このようなプローブを有する超音波診断装置では、ビームフォーミングを行うための各振動子の遅延量が、プローブ毎に各振動子の配置位置に基づいて予め計算されて、超音波診断装置内の記憶装置に固定値として記憶されている。そして、ビームフォーミングが行われる場合には、プローブ毎に、対応する遅延量が記憶装置から読み出されて用いられる。
【0004】
このような遅延量を記憶する記憶装置の容量を削減するために、プローブ内の振動子の配置位置に基づいて、ビームフォーミングを行う毎に遅延量が計算される手法が存在する(例えば、特許文献1参照)。
【0005】
一方、配置位置が固定されていない複数のプローブが連結され、各プローブにより得られる画像データが合成されて画像化される手法が存在する(例えば、特許文献2参照)。当該手法においては、プローブの連結部分に角度センサが設けられ、角度センサにより検出された角度に基づいて、各プローブに含まれる振動子の相対的な位置関係が計算される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平5−31107号公報
【特許文献2】特開2005−137581号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1の手法は、プローブ内の振動子の配置位置が既知である場合にのみ適用可能であり、振動子の配置位置が不明である場合、例えば振動子の位置関係が固定されていない場合には適用が困難である。
【0008】
また、特許文献2の手法は、各プローブに含まれる振動子の相対的な位置関係を算出するために、各プローブに角度センサが実装される必要がある。したがって、プローブの数が増えた場合には、それに対応する数の角度センサが必要となり、構成が複雑となる。
【0009】
本技術は、このような状況に鑑みてなされたものであり、超音波診断装置のプローブに含まれる複数の振動子間の位置関係が固定されていなくても、簡単な構成で適切なビームフォーミングを可能にするようにしたものである。
【課題を解決するための手段】
【0010】
本技術の一側面の信号処理装置は、相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の前記複数の振動子における反射波の信号の各位相差と、前記複数の振動子の配列が基準配列であると仮定した場合の前記複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、前記複数の振動子間の相対的な位置ずれを示す位相差を算出する位相差算出部と、前記位相差算出部により算出された前記位相差に基づいて、ビームフォーミングで用いる、前記複数の振動子の各々の遅延量を計算する遅延計算部とを備える。
【0011】
前記位相差算出部によって、前記位置ずれを示す前記位相差の算出が1回行われる毎に、前記複数の振動子のうちの1つを前記送信対象として選択することができる。
【0012】
前記位相差算出部によって、前記位置ずれを示す前記位相差の算出が1回行われる毎に、前記複数の振動子のうちの2つ以上を前記送信対象として選択することができる。
【0013】
前記位相差算出部は、前記複数の振動子の位置ずれが存在しない配列を前記基準配列として採用することができる。
【0014】
前記位相差算出部は、前記位置ずれを示す前記位相差の算出が、初回の場合には、前記複数の振動子の位置ずれが存在しない配列を前記基準配列として採用し、2回目以降の場合には、前回に算出した前記位相差が示す位置ずれが存在した状態の前記複数の振動子の配列を、前記基準配列として採用することができる。
【0015】
前記複数の振動子は、1次元に配列することができる。
【0016】
前記複数の振動子は、2次元に配列することができる。
【0017】
前記複数の振動子が、所定の数の前記振動子の組を機能ブロックとして、複数の機能ブロックに分割され、前記位相差算出手段は、前記機能ブロックを単位として、前記位置ずれを示す前記位相差を前記単位毎に算出することができる。
【0018】
本技術の一側面の信号処理方法、記録媒体、及びプログラムは、上述した本技術の一側面の信号処理装置に対応する方法、記録媒体、及びプログラムである。
【0019】
本技術の一側面の信号処理装置及び方法、記録媒体、並びにプログラムにおいては、相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の前記複数の振動子における反射波の信号の各位相差と、前記複数の振動子の配列が基準配列であると仮定した場合の前記複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、前記複数の振動子間の相対的な位置ずれを示す位相差が算出され、算出された前記位相差に基づいて、ビームフォーミングで用いる、前記複数の振動子の各々の遅延量が計算される。
【発明の効果】
【0020】
以上のごとく、本技術によれば、超音波診断装置のプローブに含まれる複数の振動子間の位置関係が固定されていなくても、簡単な構成で適切なビームフォーミングを可能にすることができる。
【図面の簡単な説明】
【0021】
【図1】振動子と対象点との関係を示す図である。
【図2】本技術の概要について説明する図である。
【図3】本技術が適用される超音波診断装置の構成例を示すブロック図である。
【図4】超音波信号処理の流れについて説明するフローチャートである。
【図5】実測処理の流れについて説明するフローチャートである。
【図6】複数の振動子を用いたキャリブレーション処理における振動子の配置を示す図である。
【図7】第2のキャリブレーション処理の繰り返し回数と対象点Fからの反射波の音圧の関係を示す図である。
【図8】第2のキャリブレーション処理を含む超音波信号処理の流れを説明するフローチャートである。
【図9】cMUTを示す図である。
【図10】複数の機能ブロックからなるプローブを示す図である。
【図11】本技術が適用される信号処理装置のハードウエアの構成例を示すブロック図である。
【発明を実施するための形態】
【0022】
[受信ビームフォーミング]
はじめに、本技術の理解を容易なものとすべく、超音波診断装置における受信ビームフォーミングについて説明する。
【0023】
図1は、振動子と対象点との関係を示す図である。
【0024】
受信ビームフォーミングとは、測定領域内の対象点からプローブ内の各振動子までの距離に基づいて、各振動子の受信波の各々を遅延させた各信号を加算する処理(以下、整相加算処理と適宜称する)によって受信波の位相をそろえ、測定領域内の対象点からの反射波の強度を示す信号(以下、反射波検出信号と称する)を生成することをいう。
【0025】
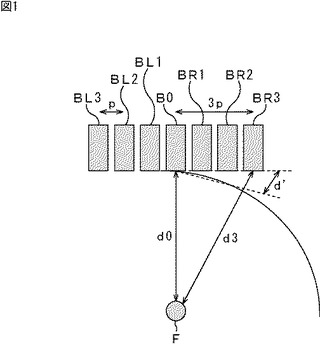
図1に示されるように、1次元に並んだアレイ状の振動子BL3,BL2,BL1,B0,BR1,BR2,BR3のそれぞれから超音波が送信され、超音波ビームが形成される。この超音波ビームは、対象点Fに当たり反射する。対象点Fからの反射波は、点音源からの反射と考えることができるため、送出方向に同心円状に伝わる。対象点Fからの反射波が各振動子に到達する時刻は、各振動子の位置によって微小な差異が生ずる。この微小な差異は、反射波が対象点Fから同心円状に放射されるのに対して、各振動子は直線状に配置されているため、対象点Fから各振動子の各々までの距離が異なるために生ずる。
【0026】
例えば、対象点Fからの反射波は、距離d0を進んで振動子B0に到達する一方で、振動子BR3に到達するためには距離d3を進む必要がある。図1に示されるように、振動子B0と振動子BR3との間の距離は、各振動子間の距離pの3倍(3×p=3p)になる。したがって、振動子B0と振動子BR3との間の距離(3×p=3p)、対象点Fから振動子B0までの距離d0、及び対象点Fから振動子BR3までの距離d3の関係は、三角定理から、次の式(1)により表される。
【0027】
【数1】

【0028】
したがって、対象点Fから振動子BR3までの距離d3は、距離d0,3pを用いて次の式(2)により算出される。
【0029】
【数2】
【0030】
したがって、対象点Fから振動子BR3までの距離d3と、対象点Fから振動子B0までの距離d0の距離差Δd’は、次の式(3)により算出される。
【0031】
【数3】
【0032】
ここで、生体内の音速を1530m/sとした場合、距離差Δd’を時間差Δt’に変換すると、次の式(4)のように表される。この時間差Δt’が、基準となる振動子B0に対する、振動子BR3における遅延量である。
【0033】
【数4】
【0034】
なお、上述の演算をデジタル処理する場合、サンプリング周波数を50MHzとすると、サンプル間隔は20ns(=1/50000Hz)、0.0306mm(=1530×20/1000000)に相当する。したがって、距離差Δd’に相当する遅延ステップ数Delaystep=Δd’/0.0306となる。
【0035】
対象点Fから同心円状に広がった反射波が、振動子で効率よく受信されるためには、広がった反射波の全てが振動子で受信されて、各振動子における反射波の信号が、上述の時間差Δt’等の各振動子毎の遅延量分だけそれぞれ遅延されながら加算される処理、すなわち整相加算処理が行われるとよい。これにより、S/N比が高い信号を、反射波検出信号として検出することができる。
【0036】
精度良い整相加算処理の実現のためには、次の2つの条件が満たされる必要がある。第1の条件は、振動子間の相対的な位置関係が既知である、という条件である。この第1の条件から、距離差Δd’の算出が可能となる。第2の条件は、音速が一定であると仮定できる、という条件である。この第2の条件から、時間差Δt’の算出が可能となる。
【0037】
通常の場合、音速は一定であると仮定できるので、第2の条件は満たされる。第1の条件が満たされるためには、振動子間の位置関係が固定されていないプローブ(以下、フレキシブルプローブと称する)の場合、何らかの手法を用いて振動子間の相対的な位置関係を把握する必要がある。フレキシブルプローブの場合、例えば、上述の特許文献2の手法のように、センサ等を用いて振動子間の相対的な位置関係を求めることが可能であるが、この場合、構成が複雑になる。そこで、本技術の手法においては、このようなセンサを実装せずとも、振動子間の相対的な位置関係の取得が可能になるように、超音波ビームの送受信が複数回繰り返される。すなわち、本技術の手法においては、フレキシブルプローブを採用したとしても、センサを実装することなく簡単な構成でビームフォーミングの実現が可能になる。
【0038】
[本技術の概要]
図2は、本技術の概要について説明する図である。
【0039】
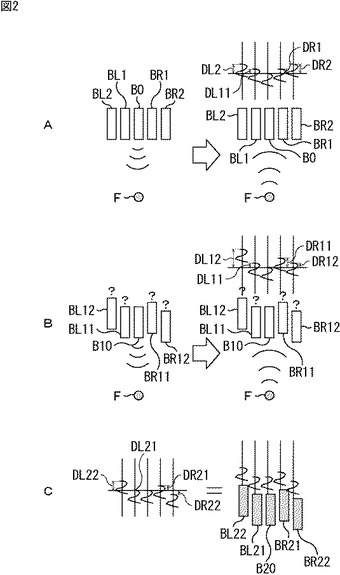
図2Aに示される例では、複数の振動子BL2,BL1,B0,BR1,BR2が、等距離に1次元に固定された状態(以下、直列固定状態と称する)で配列されている。この場合、振動子間の相対的な位置関係は既知である。図2Aの左側に示されるように、振動子B0から対象点Fの方向に超音波ビームが送信されたとする。
【0040】
すると、図2Aの右側に示されるように、振動子B0から送信された超音波ビームは、対象点Fに当たり反射する。このとき、対象点Fからの反射波は、同心円状に伝わって各振動子に到達する。ここで、図2Aの場合、振動子間の相対的な位置関係は既知であり、対象点Fからの反射波は、最初に、対象点Fから最短距離の振動子B0において受信波として到達するため、当該振動子B0における受信波を、以下、基準受信波と称する。この場合、各振動子BL2,BL1,BR1,BR2におけるそれぞれの受信波についての、基準受信波に対する遅延量(すなわち、位相差)DL2,DL1,DR1,DR2の各々は、一意に算出することができる。
【0041】
具体的には、直列固定状態では、振動子B0の左側に隣接する振動子BL1における遅延量DL1,さらに当該振動子BL1の左側に隣接する振動子BL2の遅延量DL2の順に、その値は大きくなっていく。同様に、直列固定状態では、振動子B0の右側に隣接する振動子BR1における遅延量DR1,さらに当該振動子BR1の右側に隣接する振動子BR2の遅延量DR2の順に、その値は大きくなっていく。
【0042】
このように、直列固定状態では、各振動子の遅延量は既知の位置関係により算出可能であるため、実際に超音波ビームを送受信させて実測する必要はない。
【0043】
これに対して、図2Bにおいては、複数の振動子BL12,BL11,B10,BR11,BR12は、相対的な位置関係が不明な状態で配置されている。図2Bの場合には、これらの遅延量DL12,DL11,DR11,DR12のそれぞれは、上述の式(1)乃至式(4)のような計算により算出することができず、実際に超音波ビームを送受信させて実測する必要がある。
【0044】
例えば、図2Bの左側に示されるように、振動子B10から対象点Fの方向に超音波ビームが送信されたものとする。
【0045】
この場合、図2Bの右側に示されるように、振動子B10から送信された超音波ビームは、対象点Fに当たり反射する。このとき、対象点Fからの反射波は、同心円状に伝わり各振動子BL12,BL11,B10,BR11,BR12に到達する。その際の各振動子BL12,BL11,BR11,BR12におけるそれぞれの受信波についての、基準受信波に対する実測の到達時間の差異が、遅延量DL12,DL11,DR11,DR12の各々となる。
【0046】
振動子間の相対的な位置関係が既知である場合(すなわち、直列固定状態)の遅延量DL2,DL1,DR1,DR2の各々(図2Aの右側)と、振動子間の相対的な位置関係が未知である場合の実測により算出された遅延量DL12,DL11,DR11,DR12の各々(図2Bの右側)との差分のそれぞれが、各振動子の位置の差(すなわち、位置ずれ)を示す遅延量DL22,DL21,DR21,DR22の各々(図2Cの左側)を示すことになる。
【0047】
この各振動子の位置の差(すなわち、位置ずれ)を示す遅延量DL22,DL21,DR21,DR22の各々(図2Cの左側)は、基準となる振動子B20に対する、振動子BL22,BL21,BR21,BR22の各々との位置の差(すなわち、位置ずれ)に簡単に変換することが可能になる。このようにして、位置関係が不明であった振動子の位置関係が、センサを採用せずとも簡単な演算のみで明確になる。
【0048】
このようにして算出された振動子の位置関係に対応する遅延量が、ビームフォーミングに用いられることにより、高画質の超音波画像の生成が可能となる。
【0049】
[超音波診断装置の構成例]
図3は、本技術が適用される超音波診断装置の構成例を示すブロック図である。
【0050】
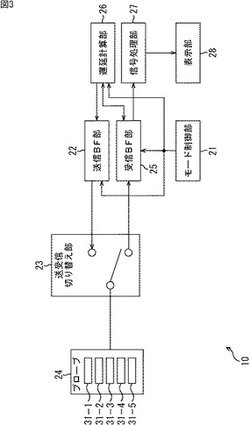
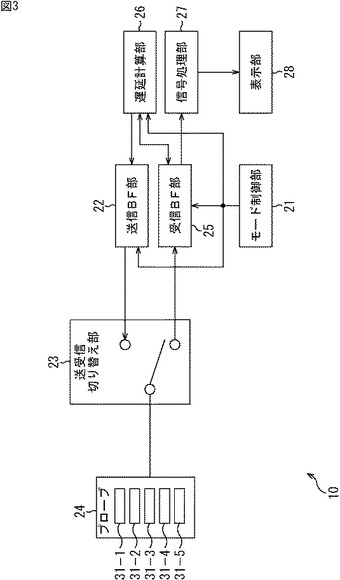
図3に示されるように、超音波診断装置10は、モード制御部21、送信BF(Beam Forming)部22、送受信切り替え部23、プローブ24、受信BF部25、遅延計算部26、信号処理部27、及び表示部28を有する。
【0051】
プローブ24は、図3の例では説明の簡略上、5つの振動子31−1乃至31−5を有するものとする。なお、以下では、振動子31−1乃至31−5を個々に区別する必要がない場合、これらをまとめて振動子31と称する。振動子31の相対的な位置関係は不明であるとする。また、振動子31の数は、図3の例では5つとされたが、特にこれに限定されない。
【0052】
モード制御部21は、超音波診断装置10のモードをキャリブレーションモードまたは実測モードのどちらか一方に切り替える。キャリブレーションモードにおいては、プローブ24内の振動子31の相対的な位置関係を算出するキャリブレーション処理が実行される。実測モードにおいては、キャリブレーションモードにおいて算出された振動子31の相対的な位置関係を用いて、測定対象が測定され画像化されて表示される。
【0053】
本実施形態においては、各振動子31の相対的な位置関係は固定されていないため、各振動子31の位置が変化した場合に、キャリブレーション処理が実行されると好適である。また、例えば、測定対象の測定が実行される前に、毎回キャリブレーション処理が行われるようにしてもよい。
【0054】
送信BF部22は、キャリブレーションモード時には、振動子を駆動して、当該振動子から送信する超音波ビームを形成する。送信BF部22は、実測モード時には、遅延計算部26により算出された遅延量分だけ遅延して送信されるように、各振動子31から送信される超音波ビームを形成する。
【0055】
送受信切り替え部23は、内蔵するスイッチを切り替えることにより、送信BF部22および受信BF部25のいずれか一方を選択して、プローブ24からの超音波ビームの送受信を切り替える。
【0056】
プローブ24に含まれる振動子31は、送信BF部22により形成された超音波ビームを送信する。また、プローブ24に含まれる振動子31は、送信した超音波ビームに対応する反射波を受信して、受信した反射波の信号を受信BF部25に供給する。
【0057】
受信BF部25は、キャリブレーションモード時には、各振動子31から供給された反射波の信号を、各振動子31の基準となる配列(以下、基準配列と称する)に基づいてそれぞれ遅延させる。また、受信BF部25は、遅延した各振動子31の信号列で相関を計算して、位相差を算出して、遅延計算部26に供給する。受信BF部25は、実測モード時には、各振動子31が受信した反射波の信号を、遅延計算部26により算出された遅延量分だけ遅延させながら加算する整相加算処理を行うことによって、反射波検出信号を生成する。受信BF部25は、生成した反射波検出信号を信号処理部27に供給する。
【0058】
遅延計算部26は、キャリブレーションモード時に、受信BF部25から供給された位相差を、前回までの処理で供給された位相差と平均化して、各振動子31の位相差を算出する。そして、遅延計算部26は、算出した位相差に基づいて、送信ビームフォーミングおよび受信ビームフォーミングのそれぞれで用いられる遅延量を計算し、計算された遅延量を上書きすることによって、遅延量の更新を行う。
【0059】
信号処理部27は、実測モード時に、受信BF部25から供給される反射波検出信号に基づいて、測定対象の超音波画像の信号を生成する。
【0060】
表示部28は、実測モード時に、信号処理部27により生成された信号に基づく超音波画像を表示する。
【0061】
[超音波信号処理]
次に、このような超音波診断装置10が実行する、測定対象の超音波画像を表示するまでの一連の処理(以下、超音波信号処理と称する)について、図4を参照して説明する。
【0062】
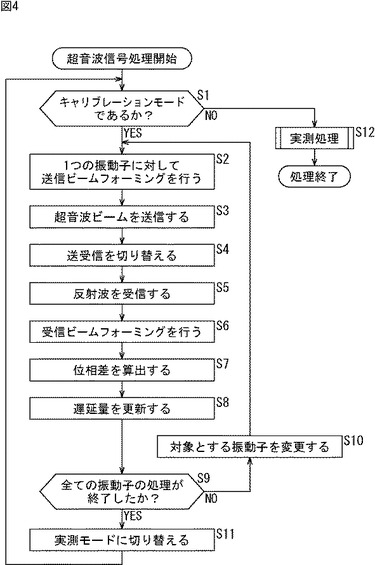
図4は、超音波信号処理の流れを説明するフローチャートである。
【0063】
ステップS1において、モード制御部21は、ユーザから指示され、設定したモードがキャリブレーションモードであるかを判定する。
【0064】
キャリブレーションモードが設定されている場合、ステップS1においてYESであると判定されて、処理はステップS2に進む。
【0065】
ステップS2において、送信BF部22は、1つの振動子31に対して送信ビームフォーミングを行う。すなわち、送信BF部22は、1つの振動子31を送信対象の振動子31として駆動して、当該振動子31から超音波ビームを送信するための信号を形成する。このとき、送受信切り替え部23は、スイッチの位置を送信BF部22側に切り替える。
【0066】
ステップS3において、プローブ24の送信対象の振動子31(例えば、振動子31−1)は、送信BF部22によりステップS2で形成された信号に基づく超音波ビームを発生し、送信する。
【0067】
ステップS4において、送受信切り替え部23は、スイッチの位置を送信BF部22側から受信BF部25側に切り替えることにより、送受信を切り替える。
【0068】
ステップS5において、各振動子31は、ステップS3において送信された超音波ビームに対応する反射波を受信する。各振動子31は、受信した反射波の信号を、受信BF部25に供給する。
【0069】
ステップS6において、受信BF部25は、受信ビームフォーミングを行う。すなわち、受信BF部25は、各振動子31から供給された反射波の信号を、各振動子31の基準配列を直列固定状態、すなわち位置ずれが存在しない配列であると仮定してそれぞれ遅延させる。
【0070】
ステップS7において、受信BF部25は、位相差を算出する。すなわち、受信BF部25は、ステップS6において遅延された各振動子31の信号列で相関を計算して、位相差を算出する。受信BF部25は、算出した位相差を、遅延計算部26に供給する。より具体的には、ステップS6の受信ビームフォーミングにおいては、図2Aの右側と図2Bの右側との差分を求める演算と等価な処理が実行されて、図2Cの左側の信号がそれぞれ出力されることになる。この図2Cの左側の信号の各位相差は、各振動子31の位置ずれを示していることになる。すなわち、各振動子31の位置ずれを示す位相差が、ステップS7の処理で算出される。
【0071】
ステップS8において、遅延計算部26は、遅延量を更新する。遅延計算部26は、受信BF部25から供給された位相差(すなわち、各振動子の位置ずれ)を、前回までの処理で供給された位相差(すなわち、各振動子の位置ずれ)と平均化して、各振動子31の位相差を算出する。そして、遅延計算部26は、算出した位相差(すなわち、平均化された各振動子の位置ずれ)に基づいて、送信ビームフォーミングおよび受信ビームフォーミングのそれぞれの遅延量を計算し、計算された遅延量を上書きすることによって、遅延量の更新を行う。
【0072】
ステップS9において、送信BF部22は、全ての振動子31の処理が終了したか、すなわち全ての振動子31から超音波ビームが送信されたかを判定する。
【0073】
まだ全ての振動子31から超音波ビームが送信されていない場合、ステップS9においてNOであると判定されて、処理はステップS10に進む。
【0074】
ステップS10において、送信BF部22は、送信ビームフォーミングの対象とする振動子31を変更する。例えば、次の振動子31−2に変更される。その後、処理はステップS2に戻され、それ以降の処理が繰り返される。すなわち、全ての振動子31の各々による送信ビームフォーミングが繰り返し実行され、その都度、ステップS2乃至S10のループ処理が繰り返されることで、送信ビームフォーミングおよび受信ビームフォーミングのそれぞれの遅延量が更新されていく。
【0075】
全ての振動子31の処理が終了した場合、ステップS9においてYESであると判定されて、処理はステップS11に進む。
【0076】
ステップS11において、モード制御部21は、実測モードに切り替える。すると、処理はステップS1に戻される。
【0077】
ステップS1において、モード制御部21は、設定されているモードがキャリブレーションモードであるかを判定する。
【0078】
いまの場合、実測モードが設定されているので、ステップS1においてNOであると判定されて、処理はステップS12に進む。
【0079】
ステップS12において、超音波診断装置20は、実測処理を行う。実測処理の詳細について図5を参照して説明する。
【0080】
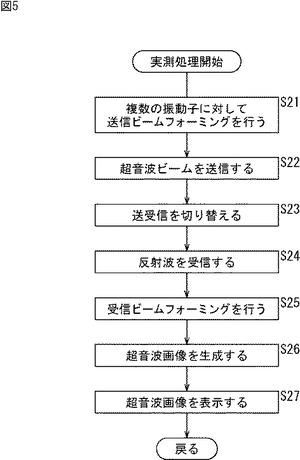
図5は、実測処理の流れを説明するフローチャートである。
【0081】
ステップS21において、送信BF部22は、複数の振動子31に対して送信ビームフォーミングを行う。すなわち、送信BF部22は、各振動子31から送信する超音波ビームが、最後の回(すなわち、直前の回)のステップS8で遅延計算部26により算出(すなわち、キャリブレーション処理時の最終更新)された遅延量分だけ遅延して送信されるように、各振動子31から送信される超音波ビームを形成するための信号を生成する。このとき、送受信切り替え部23は、スイッチの位置を送信BF部22側に切り替える。
【0082】
ステップS22において、各振動子31は、送信BF部22によりステップS21で形成された信号に基づく超音波ビームを発生し、送信する。
【0083】
ステップS23において、送受信切り替え部23は、スイッチの位置を送信BF部22側から受信BF部25側に切り替えることにより、送受信を切り替える。
【0084】
ステップS24において、各振動子31は、ステップS22において送信された超音波ビームに対応する反射波を受信する。各振動子31は、受信した反射波の信号を、受信BF部25に供給する。
【0085】
ステップS25において、受信BF部25は、受信ビームフォーミングを行う。すなわち、受信BF部25は、各振動子31が受信した反射波の信号を、最後の回(すなわち、直前の回)のステップS8で遅延計算部26により更新(すなわち、キャリブレーション処理時の最終更新)された遅延量分だけ遅延させながら加算する整相加算処理を行うことによって受信波の位相をそろえ、反射波検出信号を生成する。受信BF部25は、反射波検出信号を信号処理部27に供給する。
【0086】
ステップS26において、信号処理部27は、受信BF部25から供給される反射波検出信号に基づいて、測定対象の超音波画像の信号を生成する。
【0087】
ステップS27において、表示部28は、ステップS26で信号処理部27により生成された信号に基づく超音波画像を表示する。これにより実測処理は終了する。
【0088】
図4のフローチャートに戻り、以上のステップS12の実測処理が終了すると、超音波信号処理は終了する。
【0089】
[第2のキャリブレーション処理]
図4の例のキャリブレーション処理(以下、第1のキャリブレーション処理と称する)においては、1回の送信ビームフォーミングにおいて超音波ビームが送信される振動子31の数、すなわち送信対象の振動子31は1つであった。しかしながら、この場合、1つの振動子31から送信された超音波ビームは拡散するため、送信方向の真下にある対象点Fだけではなく、様々な位置にある対象点に当たって反射する場合がある。受信対象の振動子31が、様々な位置にある対象点からの反射波を受信した場合、第1のキャリブレーション処理の精度が低くなり、各振動子31の相対的な位置関係が正しく算出されないおそれがある。
【0090】
そこで、超音波診断装置10は、1回の送信ビームフォーミングにおいて複数の振動子31の組を送信対象の振動子31として、当該複数の振動子31から超音波ビームを送信する第2のキャリブレーション処理を実行することができる。超音波診断装置10は、このような第2のキャリブレーション処理の繰り返し処理を、複数の振動子31の組を変化させて実行する。これにより、振動子31の相対的な位置関係の算出の精度をより向上させることができる。第2のキャリブレーション処理について、図6乃至図8を参照して説明する。
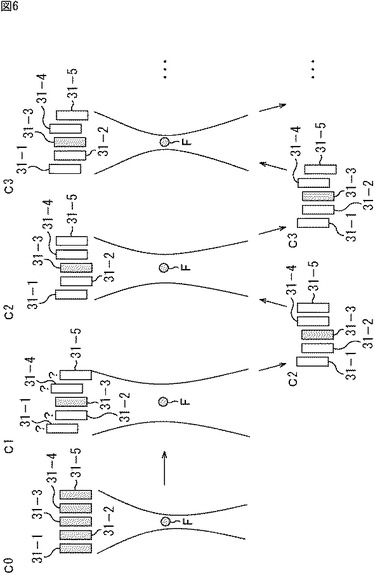
【0091】
図6は、第2のキャリブレーション処理における振動子の配置を示す図である。図6においては、5つの振動子31−1乃至31−5が一組として、第2のキャリブレーションン処理が繰り返し実行される。
【0092】
具体的には、図6の状態C1は、振動子31−1乃至31−5の実際の配置状態を表わしている。ただし、振動子31−1乃至31−5の配置はまだ推定されておらず、その相対的な位置関係はまだ不明な状態である。
【0093】
はじめに、送信BF部22は、振動子31−1乃至31−5の配置を、状態C0に示されるような直列固定状態であると仮定して、すなわち直列固定状態を基準配列として超音波ビームの信号を形成する。そして、状態C0の配置であると仮定された振動子31−1乃至31−5から超音波ビームが送信される。
【0094】
そして、受信BF部25及び遅延計算部26は、振動子31−1乃至31−5の各々の受信波に対して受信ビームフォーミングを行い、出力された各信号の相関に基づいて位相差(すなわち、各振動子31の位置ずれの推定量)を算出する。このようにして算出された位相差に基づく、振動子31−1乃至31−5の配置の推定位置を示す状態が、図6の状態C2である。
【0095】
ここで、状態C0の配置であると仮定した振動子31−1乃至31−5から送信された超音波ビームは、対象点Fに当たり反射する。しかしながら、この場合、振動子31−1乃至31−5から送信された超音波ビームは、仮定した配置でビームフォーミングされているため(超音波ビームの信号が形成されているため)、正しく絞られていないので拡散し、対象点F以外の対象点にも当たり反射する。したがって、対象点Fからの反射波に基づいて算出される位相差は、雑音が多く精度が低いものとなる。すなわち、図6の状態C0示す、振動子31−1乃至31−5の配置の推定位置(すなわち、位置ずれの推定量)における、実際の配置位置(すなわち、実際の位置ずれ)に対する誤差は、大きいものとなる。
【0096】
そこで、次に、送信BF部22は、振動子31−1乃至31−5の配置を状態C2であると仮定して、すなわち状態C2を基準配列として超音波ビームの信号を形成する。具体的には、状態C1における振動子31−1,31−5の配置位置を仮想的に変更して、状態C2の配置であると仮定する。そして、状態C2の配置であると仮定された振動子31−1乃至31−5から超音波ビームが送信される。
【0097】
そして、受信BF部25及び遅延計算部26は、振動子31−1乃至31−5の各々の受信波に対して受信ビームフォーミングを行い、出力された各信号の相関に基づいて位相差(すなわち、各振動子31の位置ずれの推定量)を再度算出する。このようにして再度算出された位相差に基づく、振動子31−1乃至31−5の配置の推定位置を示す状態が、図6の状態C3である。
【0098】
ここで、状態C3に示す、振動子31−1乃至31−5の配置の推定位置(すなわち、位置ずれの推定量)における、実際の配置位置(すなわち、実際の位置ずれ)に対する誤差は、状態C2の配置の場合の誤差と比較して小さくなっている。これは次の理由による。
【0099】
すなわち、状態C2の配置であると仮定した振動子31−1乃至31−5から送信された超音波ビームは、対象点Fに当たり反射する。また、この場合も、振動子31−1乃至31−5から送信された超音波ビームは、対象点F以外の対象点にも当たり反射する。しかしながら、振動子31の配置が状態C2の配置であると仮定した場合に送信される超音波ビームは、振動子31の配置が状態C0の配置であると仮定した場合に送信される超音波ビームと比較すると、絞られたものになっている。したがって、振動子31の配置が状態C2の配置であると仮定した場合に送信される超音波ビームの、対象点F以外の対象点からの反射波は減少するからである。
【0100】
そこで、次に、送信BF部22は、振動子31−1乃至31−5の配置を、状態C3であると仮定して、すなわち状態C3を基準配列として超音波ビームの信号を形成する。具体的には、状態C2における振動子31−5の配置位置を仮想的に変更して、状態C3の配置であると仮定する。そして、状態C3の配置であると仮定された振動子31−1乃至31−5から超音波ビームが送信される。
【0101】
このように、各振動子31の配置位置の推定位置を正解(すなわち、実際の配置位置)に近付けながら、位相差(すなわち、位置ずれの推定量)を計算する第2のキャリブレーション処理を繰り返し実行することで、各振動子31から送信される超音波ビームを絞ることができる。すなわち、各振動子31から送信される超音波ビームにより波面が合成され、仮想的に凹状に配置された振動子31から超音波ビームが送信される状態となるので、超音波ビームが絞られる。これにより、対象点F以外の対象点からの反射波が低減されるので、第2のキャリブレーション処理の精度を向上させることができる。
【0102】
また、各振動子31から送信される超音波ビームが絞られるということは、音圧が集中することと等価である。したがって、対象点Fからの反射波の音圧も高くなる。さらに、各振動子31の配置位置の推定位置が正解(すなわち、実際の配置位置)に近づくので、受信BF部25による整相加算処理の位相差が少なくなり、加算される音圧が高くなる。したがって、測定対象の測定の精度を向上させることができる。
【0103】
[第2のキャリブレーション処理の繰り返し回数]
ここで、第2のキャリブレーション処理の繰り返し回数について説明する。
【0104】
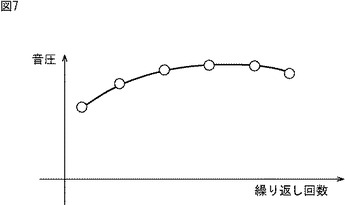
図7は、第2のキャリブレーション処理の繰り返し回数と、対象点Fからの反射波の音圧の関係とを示す図である。図7において、縦軸は、対象点Fからの反射波の音圧を示しており、横軸は、第2のキャリブレーション処理の繰り返し回数を示している。
【0105】
図7に示されるように、各振動子31の配置位置の推定位置を正解(すなわち、実際の配置位置)に近付けるように変化させながら、位相差(すなわち、位置ずれの推定量)を計算する第2のキャリブレーション処理の繰り返し回数が増えていく毎に、対象点Fからの反射波の音圧は変化する。
【0106】
ここで、上述したように、各振動子31の配置位置の推定位置が正解(すなわち、実際の配置位置)に近づくにつれ、対象点Fからの反射波の音圧が高くなる。すなわち、各振動子31の配置位置の推定位置が正解に近づいている間は、音圧の変化は上昇方向(正の方向)に向かっている。そして、理想的には、各振動子31の配置位置の推定位置が正解に一致すると、対象点Fからの反射波の音圧は最高値になり、それ以降、第2のキャリブレーションの処理が繰り返されても、各振動子31の配置位置の推定位置が正解に一致し続けるならば、音圧も最高値を保ったまま変化しないことになる。すなわち、対象点Fからの反射波の音圧の変化量がほぼ無くなれば、各振動子31の配置位置の推定位置が正解にほぼ一致したとして、第2のキャリブレーションの繰り返しを停止させるとよい。或いはまた、対象点Fからの反射波の音圧の変化が上昇方向(正の方向)から下降方向(負の方向)に変化した場合は、各振動子31の配置位置の推定位置が正解から離れる方向に向かうことを意味しているので、音圧の変化が負の方向に変化した時点で(すなわち、変極点で)、第2のキャリブレーションの繰り返しを停止させるとよい。
【0107】
そこで、対象点Fからの反射波の音圧の変化量が所定の閾値よりも低くなるか、または変化が負の方向に変化したときを収束条件として、第2のキャリブレーション処理の繰り返し回数を決定することができる。なお、この場合、第2のキャリブレーション処理の繰り返し回数の上限も予め決めておく。
【0108】
次に、上述の収束条件に用いられる対象点Fの決定の手法について説明する。1列に配列された各振動子31に対して、どれくらい離れた距離にある対象点Fを収束条件に用いるかは、例えば、次のようにして決定することができる。
【0109】
中心点と、その中心点に対して水平方向に左右に1画素分ずつずらした2点との集合を、複数組抽出する。次に、各集合毎に、3点の音圧をそれぞれ求め、中心点の音圧が最高となる集合を、対象点Fが含まれる集合の候補として抽出する。この場合、垂直方向に幾つもの候補が抽出されるので、これらの候補の中から、最も音圧が高い中心点を、対象点Fとして決定する。
【0110】
[超音波信号処理]
次に、第2のキャリブレーション処理を含む超音波信号処理について、図8を参照して説明する。
【0111】
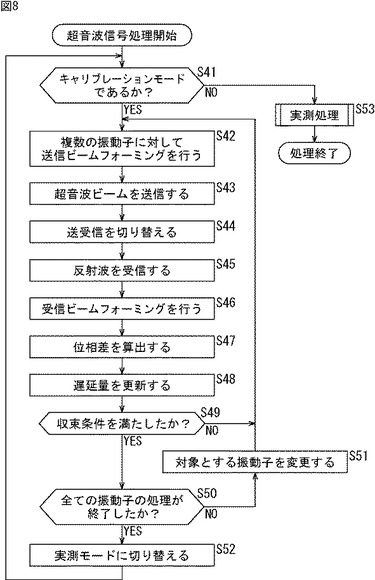
図8は、第2のキャリブレーション処理を含む超音波信号処理の流れを説明するフローチャートである。
【0112】
ステップS41において、モード制御部21は、ユーザから指示され、設定したモードがキャリブレーションモードであるかを判定する。
【0113】
キャリブレーションモードが設定されている場合、ステップS41においてYESであると判定されて、処理はステップS42に進む。
【0114】
ステップS42において、送信BF部22は、複数の振動子に対して送信ビームフォーミングを行う。すなわち、初回のステップS42の処理では、送信BF部22は、複数の振動子を送信対象の振動子として駆動して、当該複数の振動子の基準配列を直列固定状態、すなわち位置ずれが存在しない配列であると仮定して超音波ビームを送信するための信号を形成する。また、2回目以降のステップS42の処理では、送信BF部22は、複数の振動子を送信対象の振動子として駆動して、当該複数の振動子が直前の回のステップS47の処理で算出された位相差により特定される各振動子31の配置位置(すなわち、各振動子31の配置位置の推定位置)の状態であると仮定して、当該配置位置を基準配列として超音波ビームを送信するための信号を形成する。このとき、送受信切り替え部23は、スイッチの位置を送信BF部22側に切り替える。
【0115】
ステップS43において、プローブ24の複数の振動子31(例えば、振動子31−1乃至31−5)は、送信BF部22によりステップS42で形成された信号に基づく超音波ビームを発生し、送信する。
【0116】
ステップS44において、送受信切り替え部23は、スイッチの位置を送信BF部22側から受信BF部25側に切り替えることにより、送受信を切り替える。
【0117】
ステップS45において、各振動子31は、ステップS43において送信された超音波ビームに対応する反射波を受信する。各振動子31は、受信した反射波の信号を、受信BF部25に供給する。
【0118】
ステップS46において、受信BF部25は、受信ビームフォーミングを行う。すなわち、初回のステップS46の処理では、受信BF部25は、各振動子31から供給された反射波の信号を、各振動子31の基準配列を直列固定状態であると仮定してそれぞれ遅延させる。また、2回目以降のステップS46の処理では、受信BF部25は、各振動子31から供給された反射波の信号を、各振動子31の基準配列を直前の回のステップS47の処理で算出された位相差により特定される各振動子31の配置位置(すなわち、各振動子31の配置位置の推定位置)の状態であると仮定して、それぞれ遅延させる。
【0119】
ステップS47において、受信BF部25は、位相差を算出する。すなわち、受信BF部25は、ステップS46において遅延された各振動子31の信号列で相関を計算して、位相差を算出する。受信BF部25は、算出した位相差を、遅延計算部26に供給する。
【0120】
ステップS48において、遅延計算部26は、遅延量を更新する。遅延計算部26は、受信BF部25から供給された位相差(すなわち、各振動子の位置ずれ)を、前回までの処理で供給された位相差(すなわち、各振動子の位置ずれ)と平均化して、各振動子31の位相差を算出する。そして、遅延計算部26は、算出した位相差(すなわち、平均化された各振動子の位置ずれ)に基づいて、送信ビームフォーミングおよび受信ビームフォーミングのそれぞれの遅延量を算出し、算出された遅延量を上書きすることによって、遅延量の更新を行う。
【0121】
ステップS49において、受信BF部25は、収束条件を満たしたかを判定する。すなわち、受信BF部25は、対象点Fからの反射波の音圧の変化量が所定の閾値よりも小さくなったか、または負の値となったかを判定する。
【0122】
収束条件を満たしていない場合、ステップS49においてNOであると判定されて、処理はステップS42に戻され、それ以降の処理が繰り返される。すなわち、収束条件を満たすまでの間、ステップS42乃至S49のループ処理が繰り返される。なお、ステップS42乃至S49のループ処理が繰り返される間、各振動子31の配置位置の推定位置は、実際の配置位置に近づくように変化されながら位相差が算出される。そして、算出された位相差に基づいて遅延量が更新される。
【0123】
その後、収束条件を満たした場合、ステップS49においてYESであると判定されて、処理はステップS50に進む。
【0124】
ステップS50において、送信BF部22は、全ての振動子31の処理が終了したか、すなわち複数の振動子31の組からの超音波ビームの送信の処理が、全ての組においてなされたかを判定する。
【0125】
まだ全ての振動子31から超音波ビームが送信されていない場合、ステップS50においてNOであると判定されて、処理はステップ51に進む。
【0126】
ステップS51において、送信BF部22は、送信ビームフォーミングの対象とする振動子31の組を変更する。例えば、図示せぬ次の振動子31−6乃至31−10に変更される。その後、処理はステップS42に戻され、それ以降の処理が繰り返される。すなわち、全ての振動子31の組による送信ビームフォーミングが繰り返し実行され、その都度、ステップS42乃至S51のループ処理が繰り返されることで、送信ビームフォーミングおよび受信ビームフォーミングのそれぞれの遅延量が更新されていく。
【0127】
全ての振動子31の処理が終了した場合、ステップS50においてYESであると判定されて、処理はステップS52に進む。
【0128】
ステップS52において、モード制御部21は、実測モードに切り替える。すると、処理はステップS41に戻される。
【0129】
ステップS41において、モード制御部21は、設定されているモードがキャリブレーションモードであるかを判定する。
【0130】
いまの場合、実測モードが設定されているので、ステップS41においてNOであると判定されて、処理はステップS53に進む。
【0131】
ステップS53において、超音波診断装置20は、実測処理を行う。実測処理の詳細については、図5を用いて説明済みであり、重複するので省略する。
【0132】
ステップS53の実測処理が終了すると、第2のキャリブレーション処理を含む超音波信号処理は終了する。
【0133】
このように、各振動子31の配置位置の推定位置を正解(すなわち、実際の配置位置)に近付けながら、位相差(すなわち、位置ずれの推定量)を計算する第2のキャリブレーション処理を繰り返し実行することで、各振動子31から送信される超音波ビームを絞ることができる。これにより、対象点F以外の対象点からの反射波が低減されるので、第2のキャリブレーション処理の精度を向上させることができる。また、受信BF部25による整相加算処理の位相差が少なくなり、加算される音圧が高くなるので、測定対象の測定の精度を向上させることができる。
【0134】
なお、図8の第2のキャリブレーション処理を含む超音波信号処理が実行される前に、図4の第1のキャリブレーション処理を含む超音波信号処理が実行されるようにしてもよい。この場合、はじめに、第1のキャリブレーション処理を含む超音波信号処理によって、各振動子31の相対的な位置関係が算出される。したがって、算出された当該位置関係を各振動子31の配置の推定位置の初期状態として、第2のキャリブレーション処理を含む超音波信号処理が実行されることにより、第2のキャリブレーション処理の精度をより向上させることができる。
【0135】
[2次元配列の振動子]
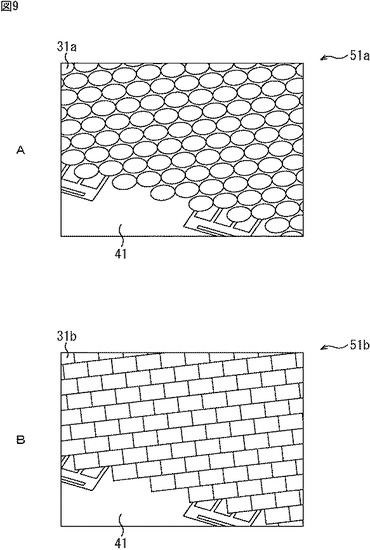
各振動子31は、上述のように1次元アレイでもよいが、2次元アレイでもよい。2次元アレイの複数の振動子31として、例えば、cMUT(Capacitive Micro-machined Ultrasonic Transducers)に実装される微細構造の振動子を採用できる。cMUTは、MEMS(Micro-Electro-Mechanical systems)技術によって、微細構造の各振動子が、フレキシブル基板上に実装された超音波トランスデューサである。cMUTにおける各振動子31の形状は、特に限定されず、例えば、図9に示されるような形状であってもよい。
【0136】
図9は、cMUTを示す図である。図9Aには、フレキシブル基板41に円形の振動子31aが実装されて構成されるcMUT51aが示されている。図9Bには、フレキシブル基板41に四角形の振動子31bが実装されて構成されるcMUT51bが示されている。
【0137】
cMUTに用いられるフレキシブル基板41は、形状が自由に変形可能である。したがって、cMUTをプローブ24として用いる場合、その形状を、ベルト状、帯状、シート状等に整形することができる。しかしながら、cMUTにおいては、各振動子31が微細構造であることから、各振動子31の位置関係を算出するために、各振動子31にセンサを実装するのは困難である。そこで、本技術の手法をcMUTに適用することにより、センサを実装せずとも各振動子31の位置関係を算出することが可能となる。
【0138】
本技術の手法をcMUTに適用した場合の超音波信号処理は、基本的に上述の処理と同様である。ただし、この場合、各振動子31の構造が微細であることから、隣接する振動子31の位置関係は、ほぼ平面に位置すると仮定することができる。したがって、第2のキャリブレーション処理を含む超音波信号処理において、第2のキャリブレーション処理の繰り返し回数を増やさなくても、第2のキャリブレーション処理の精度を向上させることができる。
【0139】
第2のキャリブレーション処理においては、振動子31の位置関係が未知である場合、多くの振動子31から超音波ビームが送信されると、振動子31の配置の推定位置における、実際の振動子31の配置位置に対する誤差は、大きいものとなる。しかしながら、隣接する振動子31の位置関係を平面に位置すると仮定すると、振動子31の配置の推定の誤差をある程度抑制することが可能となる。したがって、第2のキャリブレーション処理がたとえ1回だけ実行されたとしても、第2のキャリブレーション処理の精度を向上させることができるのである。
【0140】
[機能ブロック]
さらに、例えば、位置関係が固定された複数の振動子31を1つの組(以下、このような組を機能ブロックと称する)として、複数の機能ブロックを定義して、これらの複数の機能ブロックの相互の位置関係を、本技術の手法により算出してもよい。
【0141】
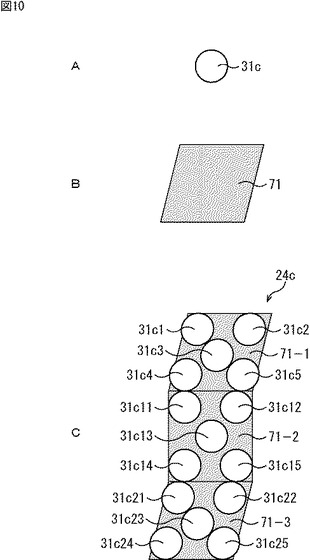
図10は、複数の機能ブロックからなるプローブを示す図である。
【0142】
図10Aには、円形の振動子31cが示されている。なお、振動子31cの形状は、特に円形に限定されない。図10Bには、機能ブロック71が示されている。図10Cには、全部で15個の振動子31cからなるプローブ24cが示されている。プローブ24cは、3つの機能ブロック71−1乃至71−3から構成される。また、機能ブロック71−1乃至71−3には、それぞれ5つの振動子31が含まれる。具体的には、機能ブロック71−1には、振動子31c1乃至振動子31c5が含まれる。また、機能ブロック71−2には、振動子31c11乃至振動子31c15が含まれる。また、機能ブロック71−3には、振動子31c21乃至振動子31c25が含まれる。
【0143】
機能ブロック71−1乃至71−3にそれぞれ含まれる5つの振動子31cは、物理的に固定されていて、位置関係が変動しない。なお、5つの振動子31cは、振動子31c間で接続されることにより、物理的に固定されてもよい。また、機能ブロック71−1乃至71−3において、5つの振動子31cが実装される基板を非フレキシブル基板として、5つの振動子31cが非フレキシブル基板に実装されることにより、物理的に固定されてもよい。
【0144】
このような構成のブローブ24cにおいては、送信BF部22は、1回の送信ビームフォーミングにおいて、機能ブロック71−1乃至71−3の各々を1つの単位として超音波ビームを送信するキャリブレーション処理を実行する。そして、受信BF部25及び遅延計算部26は、機能ブロック71−1乃至71−3の各々を単位とする受信波に対して受信ビームフォーミングを行い、出力された各信号の相関に基づいて位相差を単位毎に算出する。このようにして単位毎に算出された位相差に基づいて、各単位間の相対的な位置関係、すなわち隣接する機能ブロック71−1乃至71−3間の相対的な位置関係を算出することができる。
【0145】
このように、本技術の手法においては、センサを実装せずとも、振動子間の相対的な位置関係の取得が可能になる。したがって、本技術の手法においては、フレキシブルプローブを採用したとしても、センサを実装しない簡単な構成でビームフォーミングの実現が可能になる。
【0146】
[本技術のプログラムへの適用]
上述した一連の処理は、ハードウエアにより実行することもできるし、ソフトウエアにより実行することもできる。一連の処理をソフトウエアにより実行する場合には、そのソフトウエアを構成するプログラムが、コンピュータにインストールされる。ここで、コンピュータには、専用のハードウエアに組み込まれているコンピュータや、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピュータなどが含まれる。
【0147】
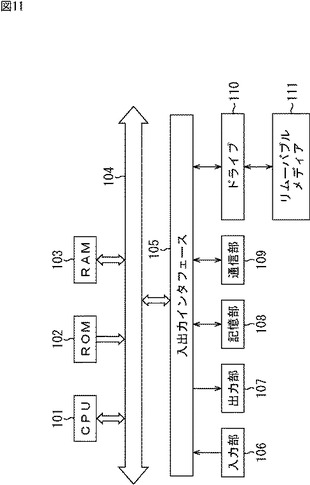
図11は、上述した一連の処理をプログラムにより実行するコンピュータのハードウエアの構成例を示すブロック図である。
【0148】
コンピュータにおいて、CPU(Central Processing Unit)101,ROM(Read Only Memory)102,RAM(Random Access Memory)103は、バス104により相互に接続されている。
【0149】
バス104には、さらに、入出力インタフェース105が接続されている。入出力インタフェース105には、入力部106、出力部107、記憶部108、通信部109、及びドライブ110が接続されている。
【0150】
入力部106は、キーボード、マウス、マイクロフォンなどよりなる。出力部107は、ディスプレイ、スピーカなどよりなる。記憶部108は、ハードディスクや不揮発性のメモリなどよりなる。通信部109は、ネットワークインタフェースなどよりなる。ドライブ110は、磁気ディスク、光ディスク、光磁気ディスク、又は半導体メモリなどのリムーバブルメディア111を駆動する。
【0151】
以上のように構成されるコンピュータでは、CPU101が、例えば、記憶部108に記憶されているプログラムを、入出力インタフェース105及びバス104を介して、RAM103にロードして実行することにより、上述した一連の処理が行われる。
【0152】
コンピュータ(CPU101)が実行するプログラムは、例えば、パッケージメディア等としてのリムーバブルメディア111に記録して提供することができる。また、プログラムは、ローカルエリアネットワーク、インターネット、デジタル衛星放送といった、有線または無線の伝送媒体を介して提供することができる。
【0153】
コンピュータでは、プログラムは、リムーバブルメディア111をドライブ110に装着することにより、入出力インタフェース105を介して、記憶部108にインストールすることができる。また、プログラムは、有線または無線の伝送媒体を介して、通信部109で受信し、記憶部108にインストールすることができる。その他、プログラムは、ROM102や記憶部108に、あらかじめインストールしておくことができる。
【0154】
なお、コンピュータが実行するプログラムは、本明細書で説明する順序に沿って時系列に処理が行われるプログラムであっても良いし、並列に、あるいは呼び出しが行われたとき等の必要なタイミングで処理が行われるプログラムであっても良い。
【0155】
本技術の実施の形態は、上述した実施の形態に限定されるものではなく、本技術の要旨を逸脱しない範囲において種々の変更が可能である。
【0156】
例えば、本技術は、1つの機能をネットワークを介して複数の装置で分担、共同して処理するクラウドコンピューティングの構成をとることができる。
【0157】
また、上述のフローチャートで説明した各ステップは、1つの装置で実行する他、複数の装置で分担して実行することができる。
【0158】
さらに、1つのステップに複数の処理が含まれる場合には、その1つのステップに含まれる複数の処理は、1つの装置で実行する他、複数の装置で分担して実行することができる。
【0159】
なお、本技術は、以下のような構成もとることができる。
(1)
相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の前記複数の振動子における反射波の信号の各位相差と、前記複数の振動子の配列が基準配列であると仮定した場合の前記複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、前記複数の振動子間の相対的な位置ずれを示す位相差を算出する位相差算出部と、
前記位相差算出部により算出された前記位相差に基づいて、ビームフォーミングで用いる、前記複数の振動子の各々の遅延量を計算する遅延計算部と
を備える信号処理装置。
(2)
前記位相差算出部によって、前記位置ずれを示す前記位相差の算出が1回行われる毎に、前記複数の振動子のうちの1つが前記送信対象として選択される
前記(1)に記載の信号処理装置。
(3)
前記位相差算出部によって、前記位置ずれを示す前記位相差の算出が1回行われる毎に、前記複数の振動子のうちの2つ以上が前記送信対象として選択される
前記(1)または(2)に記載の信号処理装置。
(4)
前記位相差算出部は、前記複数の振動子の位置ずれが存在しない配列を前記基準配列として採用する
前記(1)乃至(3)のいずれかに記載の信号処理装置。
(5)
前記位相差算出部は、前記位置ずれを示す前記位相差の算出が、初回の場合には、前記複数の振動子の位置ずれが存在しない配列を前記基準配列として採用し、2回目以降の場合には、前回に算出した前記位相差が示す位置ずれが存在した状態の前記複数の振動子の配列を、前記基準配列として採用する
前記(1)乃至(4)のいずれかに記載の信号処理装置。
(6)
前記複数の振動子は、1次元に配列されている
前記(1)乃至(5)のいずれかに記載の信号処理装置。
(7)
前記複数の振動子は、2次元に配列されている
前記(1)乃至(6)のいずれかに記載の信号処理装置。
(8)
前記複数の振動子が、所定の数の前記振動子の組を機能ブロックとして、複数の機能ブロックに分割され、
前記位相差算出手段は、前記機能ブロックを単位として、前記位置ずれを示す前記位相差を前記単位毎に算出する
前記(1)乃至(7)のいずれかに記載の信号処理装置。
【0160】
本技術は、コンテンツを編集する編集装置に適用することができる。
【符号の説明】
【0161】
10 超音波診断装置, 21 モード制御部, 22 送信BF部, 23 送受信切り替え部, 24 プローブ, 25 受信BF部, 26 遅延計算部, 27 信号処理部, 28 表示部, 31 振動子, 41 フレキシブル基板, 51a,51b cMUT, 71 機能ブロック
【技術分野】
【0001】
本技術は、信号処理装置及び方法、記録媒体、並びにプログラムに関し、特に、超音波診断装置のプローブに含まれる複数の振動子間の位置関係が固定されていなくても、簡単な構成で適切なビームフォーミングを可能にする、信号処理装置及び方法、記録媒体、並びにプログラムに関する。
【背景技術】
【0002】
従来、超音波診断装置は、プローブ内に含まれる複数の振動子から生体内に向けて送信した超音波の反射波を再びプローブで受信する。そして、超音波診断装置は、受信した反射波に処理を施すことによって、測定対象を画像化する。このとき、超音波診断装置では、ビームフォーミングが行われている。ビームフォーミングとは、各振動子が超音波を送受信するタイミングを、超音波の遅延量に基づいて個別に制御する処理である。
【0003】
プローブのなかには、各振動子の配置位置が固定されているものもある。このようなプローブを有する超音波診断装置では、ビームフォーミングを行うための各振動子の遅延量が、プローブ毎に各振動子の配置位置に基づいて予め計算されて、超音波診断装置内の記憶装置に固定値として記憶されている。そして、ビームフォーミングが行われる場合には、プローブ毎に、対応する遅延量が記憶装置から読み出されて用いられる。
【0004】
このような遅延量を記憶する記憶装置の容量を削減するために、プローブ内の振動子の配置位置に基づいて、ビームフォーミングを行う毎に遅延量が計算される手法が存在する(例えば、特許文献1参照)。
【0005】
一方、配置位置が固定されていない複数のプローブが連結され、各プローブにより得られる画像データが合成されて画像化される手法が存在する(例えば、特許文献2参照)。当該手法においては、プローブの連結部分に角度センサが設けられ、角度センサにより検出された角度に基づいて、各プローブに含まれる振動子の相対的な位置関係が計算される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平5−31107号公報
【特許文献2】特開2005−137581号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1の手法は、プローブ内の振動子の配置位置が既知である場合にのみ適用可能であり、振動子の配置位置が不明である場合、例えば振動子の位置関係が固定されていない場合には適用が困難である。
【0008】
また、特許文献2の手法は、各プローブに含まれる振動子の相対的な位置関係を算出するために、各プローブに角度センサが実装される必要がある。したがって、プローブの数が増えた場合には、それに対応する数の角度センサが必要となり、構成が複雑となる。
【0009】
本技術は、このような状況に鑑みてなされたものであり、超音波診断装置のプローブに含まれる複数の振動子間の位置関係が固定されていなくても、簡単な構成で適切なビームフォーミングを可能にするようにしたものである。
【課題を解決するための手段】
【0010】
本技術の一側面の信号処理装置は、相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の前記複数の振動子における反射波の信号の各位相差と、前記複数の振動子の配列が基準配列であると仮定した場合の前記複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、前記複数の振動子間の相対的な位置ずれを示す位相差を算出する位相差算出部と、前記位相差算出部により算出された前記位相差に基づいて、ビームフォーミングで用いる、前記複数の振動子の各々の遅延量を計算する遅延計算部とを備える。
【0011】
前記位相差算出部によって、前記位置ずれを示す前記位相差の算出が1回行われる毎に、前記複数の振動子のうちの1つを前記送信対象として選択することができる。
【0012】
前記位相差算出部によって、前記位置ずれを示す前記位相差の算出が1回行われる毎に、前記複数の振動子のうちの2つ以上を前記送信対象として選択することができる。
【0013】
前記位相差算出部は、前記複数の振動子の位置ずれが存在しない配列を前記基準配列として採用することができる。
【0014】
前記位相差算出部は、前記位置ずれを示す前記位相差の算出が、初回の場合には、前記複数の振動子の位置ずれが存在しない配列を前記基準配列として採用し、2回目以降の場合には、前回に算出した前記位相差が示す位置ずれが存在した状態の前記複数の振動子の配列を、前記基準配列として採用することができる。
【0015】
前記複数の振動子は、1次元に配列することができる。
【0016】
前記複数の振動子は、2次元に配列することができる。
【0017】
前記複数の振動子が、所定の数の前記振動子の組を機能ブロックとして、複数の機能ブロックに分割され、前記位相差算出手段は、前記機能ブロックを単位として、前記位置ずれを示す前記位相差を前記単位毎に算出することができる。
【0018】
本技術の一側面の信号処理方法、記録媒体、及びプログラムは、上述した本技術の一側面の信号処理装置に対応する方法、記録媒体、及びプログラムである。
【0019】
本技術の一側面の信号処理装置及び方法、記録媒体、並びにプログラムにおいては、相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の前記複数の振動子における反射波の信号の各位相差と、前記複数の振動子の配列が基準配列であると仮定した場合の前記複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、前記複数の振動子間の相対的な位置ずれを示す位相差が算出され、算出された前記位相差に基づいて、ビームフォーミングで用いる、前記複数の振動子の各々の遅延量が計算される。
【発明の効果】
【0020】
以上のごとく、本技術によれば、超音波診断装置のプローブに含まれる複数の振動子間の位置関係が固定されていなくても、簡単な構成で適切なビームフォーミングを可能にすることができる。
【図面の簡単な説明】
【0021】
【図1】振動子と対象点との関係を示す図である。
【図2】本技術の概要について説明する図である。
【図3】本技術が適用される超音波診断装置の構成例を示すブロック図である。
【図4】超音波信号処理の流れについて説明するフローチャートである。
【図5】実測処理の流れについて説明するフローチャートである。
【図6】複数の振動子を用いたキャリブレーション処理における振動子の配置を示す図である。
【図7】第2のキャリブレーション処理の繰り返し回数と対象点Fからの反射波の音圧の関係を示す図である。
【図8】第2のキャリブレーション処理を含む超音波信号処理の流れを説明するフローチャートである。
【図9】cMUTを示す図である。
【図10】複数の機能ブロックからなるプローブを示す図である。
【図11】本技術が適用される信号処理装置のハードウエアの構成例を示すブロック図である。
【発明を実施するための形態】
【0022】
[受信ビームフォーミング]
はじめに、本技術の理解を容易なものとすべく、超音波診断装置における受信ビームフォーミングについて説明する。
【0023】
図1は、振動子と対象点との関係を示す図である。
【0024】
受信ビームフォーミングとは、測定領域内の対象点からプローブ内の各振動子までの距離に基づいて、各振動子の受信波の各々を遅延させた各信号を加算する処理(以下、整相加算処理と適宜称する)によって受信波の位相をそろえ、測定領域内の対象点からの反射波の強度を示す信号(以下、反射波検出信号と称する)を生成することをいう。
【0025】
図1に示されるように、1次元に並んだアレイ状の振動子BL3,BL2,BL1,B0,BR1,BR2,BR3のそれぞれから超音波が送信され、超音波ビームが形成される。この超音波ビームは、対象点Fに当たり反射する。対象点Fからの反射波は、点音源からの反射と考えることができるため、送出方向に同心円状に伝わる。対象点Fからの反射波が各振動子に到達する時刻は、各振動子の位置によって微小な差異が生ずる。この微小な差異は、反射波が対象点Fから同心円状に放射されるのに対して、各振動子は直線状に配置されているため、対象点Fから各振動子の各々までの距離が異なるために生ずる。
【0026】
例えば、対象点Fからの反射波は、距離d0を進んで振動子B0に到達する一方で、振動子BR3に到達するためには距離d3を進む必要がある。図1に示されるように、振動子B0と振動子BR3との間の距離は、各振動子間の距離pの3倍(3×p=3p)になる。したがって、振動子B0と振動子BR3との間の距離(3×p=3p)、対象点Fから振動子B0までの距離d0、及び対象点Fから振動子BR3までの距離d3の関係は、三角定理から、次の式(1)により表される。
【0027】
【数1】
【0028】
したがって、対象点Fから振動子BR3までの距離d3は、距離d0,3pを用いて次の式(2)により算出される。
【0029】
【数2】
【0030】
したがって、対象点Fから振動子BR3までの距離d3と、対象点Fから振動子B0までの距離d0の距離差Δd’は、次の式(3)により算出される。
【0031】
【数3】
【0032】
ここで、生体内の音速を1530m/sとした場合、距離差Δd’を時間差Δt’に変換すると、次の式(4)のように表される。この時間差Δt’が、基準となる振動子B0に対する、振動子BR3における遅延量である。
【0033】
【数4】
【0034】
なお、上述の演算をデジタル処理する場合、サンプリング周波数を50MHzとすると、サンプル間隔は20ns(=1/50000Hz)、0.0306mm(=1530×20/1000000)に相当する。したがって、距離差Δd’に相当する遅延ステップ数Delaystep=Δd’/0.0306となる。
【0035】
対象点Fから同心円状に広がった反射波が、振動子で効率よく受信されるためには、広がった反射波の全てが振動子で受信されて、各振動子における反射波の信号が、上述の時間差Δt’等の各振動子毎の遅延量分だけそれぞれ遅延されながら加算される処理、すなわち整相加算処理が行われるとよい。これにより、S/N比が高い信号を、反射波検出信号として検出することができる。
【0036】
精度良い整相加算処理の実現のためには、次の2つの条件が満たされる必要がある。第1の条件は、振動子間の相対的な位置関係が既知である、という条件である。この第1の条件から、距離差Δd’の算出が可能となる。第2の条件は、音速が一定であると仮定できる、という条件である。この第2の条件から、時間差Δt’の算出が可能となる。
【0037】
通常の場合、音速は一定であると仮定できるので、第2の条件は満たされる。第1の条件が満たされるためには、振動子間の位置関係が固定されていないプローブ(以下、フレキシブルプローブと称する)の場合、何らかの手法を用いて振動子間の相対的な位置関係を把握する必要がある。フレキシブルプローブの場合、例えば、上述の特許文献2の手法のように、センサ等を用いて振動子間の相対的な位置関係を求めることが可能であるが、この場合、構成が複雑になる。そこで、本技術の手法においては、このようなセンサを実装せずとも、振動子間の相対的な位置関係の取得が可能になるように、超音波ビームの送受信が複数回繰り返される。すなわち、本技術の手法においては、フレキシブルプローブを採用したとしても、センサを実装することなく簡単な構成でビームフォーミングの実現が可能になる。
【0038】
[本技術の概要]
図2は、本技術の概要について説明する図である。
【0039】
図2Aに示される例では、複数の振動子BL2,BL1,B0,BR1,BR2が、等距離に1次元に固定された状態(以下、直列固定状態と称する)で配列されている。この場合、振動子間の相対的な位置関係は既知である。図2Aの左側に示されるように、振動子B0から対象点Fの方向に超音波ビームが送信されたとする。
【0040】
すると、図2Aの右側に示されるように、振動子B0から送信された超音波ビームは、対象点Fに当たり反射する。このとき、対象点Fからの反射波は、同心円状に伝わって各振動子に到達する。ここで、図2Aの場合、振動子間の相対的な位置関係は既知であり、対象点Fからの反射波は、最初に、対象点Fから最短距離の振動子B0において受信波として到達するため、当該振動子B0における受信波を、以下、基準受信波と称する。この場合、各振動子BL2,BL1,BR1,BR2におけるそれぞれの受信波についての、基準受信波に対する遅延量(すなわち、位相差)DL2,DL1,DR1,DR2の各々は、一意に算出することができる。
【0041】
具体的には、直列固定状態では、振動子B0の左側に隣接する振動子BL1における遅延量DL1,さらに当該振動子BL1の左側に隣接する振動子BL2の遅延量DL2の順に、その値は大きくなっていく。同様に、直列固定状態では、振動子B0の右側に隣接する振動子BR1における遅延量DR1,さらに当該振動子BR1の右側に隣接する振動子BR2の遅延量DR2の順に、その値は大きくなっていく。
【0042】
このように、直列固定状態では、各振動子の遅延量は既知の位置関係により算出可能であるため、実際に超音波ビームを送受信させて実測する必要はない。
【0043】
これに対して、図2Bにおいては、複数の振動子BL12,BL11,B10,BR11,BR12は、相対的な位置関係が不明な状態で配置されている。図2Bの場合には、これらの遅延量DL12,DL11,DR11,DR12のそれぞれは、上述の式(1)乃至式(4)のような計算により算出することができず、実際に超音波ビームを送受信させて実測する必要がある。
【0044】
例えば、図2Bの左側に示されるように、振動子B10から対象点Fの方向に超音波ビームが送信されたものとする。
【0045】
この場合、図2Bの右側に示されるように、振動子B10から送信された超音波ビームは、対象点Fに当たり反射する。このとき、対象点Fからの反射波は、同心円状に伝わり各振動子BL12,BL11,B10,BR11,BR12に到達する。その際の各振動子BL12,BL11,BR11,BR12におけるそれぞれの受信波についての、基準受信波に対する実測の到達時間の差異が、遅延量DL12,DL11,DR11,DR12の各々となる。
【0046】
振動子間の相対的な位置関係が既知である場合(すなわち、直列固定状態)の遅延量DL2,DL1,DR1,DR2の各々(図2Aの右側)と、振動子間の相対的な位置関係が未知である場合の実測により算出された遅延量DL12,DL11,DR11,DR12の各々(図2Bの右側)との差分のそれぞれが、各振動子の位置の差(すなわち、位置ずれ)を示す遅延量DL22,DL21,DR21,DR22の各々(図2Cの左側)を示すことになる。
【0047】
この各振動子の位置の差(すなわち、位置ずれ)を示す遅延量DL22,DL21,DR21,DR22の各々(図2Cの左側)は、基準となる振動子B20に対する、振動子BL22,BL21,BR21,BR22の各々との位置の差(すなわち、位置ずれ)に簡単に変換することが可能になる。このようにして、位置関係が不明であった振動子の位置関係が、センサを採用せずとも簡単な演算のみで明確になる。
【0048】
このようにして算出された振動子の位置関係に対応する遅延量が、ビームフォーミングに用いられることにより、高画質の超音波画像の生成が可能となる。
【0049】
[超音波診断装置の構成例]
図3は、本技術が適用される超音波診断装置の構成例を示すブロック図である。
【0050】
図3に示されるように、超音波診断装置10は、モード制御部21、送信BF(Beam Forming)部22、送受信切り替え部23、プローブ24、受信BF部25、遅延計算部26、信号処理部27、及び表示部28を有する。
【0051】
プローブ24は、図3の例では説明の簡略上、5つの振動子31−1乃至31−5を有するものとする。なお、以下では、振動子31−1乃至31−5を個々に区別する必要がない場合、これらをまとめて振動子31と称する。振動子31の相対的な位置関係は不明であるとする。また、振動子31の数は、図3の例では5つとされたが、特にこれに限定されない。
【0052】
モード制御部21は、超音波診断装置10のモードをキャリブレーションモードまたは実測モードのどちらか一方に切り替える。キャリブレーションモードにおいては、プローブ24内の振動子31の相対的な位置関係を算出するキャリブレーション処理が実行される。実測モードにおいては、キャリブレーションモードにおいて算出された振動子31の相対的な位置関係を用いて、測定対象が測定され画像化されて表示される。
【0053】
本実施形態においては、各振動子31の相対的な位置関係は固定されていないため、各振動子31の位置が変化した場合に、キャリブレーション処理が実行されると好適である。また、例えば、測定対象の測定が実行される前に、毎回キャリブレーション処理が行われるようにしてもよい。
【0054】
送信BF部22は、キャリブレーションモード時には、振動子を駆動して、当該振動子から送信する超音波ビームを形成する。送信BF部22は、実測モード時には、遅延計算部26により算出された遅延量分だけ遅延して送信されるように、各振動子31から送信される超音波ビームを形成する。
【0055】
送受信切り替え部23は、内蔵するスイッチを切り替えることにより、送信BF部22および受信BF部25のいずれか一方を選択して、プローブ24からの超音波ビームの送受信を切り替える。
【0056】
プローブ24に含まれる振動子31は、送信BF部22により形成された超音波ビームを送信する。また、プローブ24に含まれる振動子31は、送信した超音波ビームに対応する反射波を受信して、受信した反射波の信号を受信BF部25に供給する。
【0057】
受信BF部25は、キャリブレーションモード時には、各振動子31から供給された反射波の信号を、各振動子31の基準となる配列(以下、基準配列と称する)に基づいてそれぞれ遅延させる。また、受信BF部25は、遅延した各振動子31の信号列で相関を計算して、位相差を算出して、遅延計算部26に供給する。受信BF部25は、実測モード時には、各振動子31が受信した反射波の信号を、遅延計算部26により算出された遅延量分だけ遅延させながら加算する整相加算処理を行うことによって、反射波検出信号を生成する。受信BF部25は、生成した反射波検出信号を信号処理部27に供給する。
【0058】
遅延計算部26は、キャリブレーションモード時に、受信BF部25から供給された位相差を、前回までの処理で供給された位相差と平均化して、各振動子31の位相差を算出する。そして、遅延計算部26は、算出した位相差に基づいて、送信ビームフォーミングおよび受信ビームフォーミングのそれぞれで用いられる遅延量を計算し、計算された遅延量を上書きすることによって、遅延量の更新を行う。
【0059】
信号処理部27は、実測モード時に、受信BF部25から供給される反射波検出信号に基づいて、測定対象の超音波画像の信号を生成する。
【0060】
表示部28は、実測モード時に、信号処理部27により生成された信号に基づく超音波画像を表示する。
【0061】
[超音波信号処理]
次に、このような超音波診断装置10が実行する、測定対象の超音波画像を表示するまでの一連の処理(以下、超音波信号処理と称する)について、図4を参照して説明する。
【0062】
図4は、超音波信号処理の流れを説明するフローチャートである。
【0063】
ステップS1において、モード制御部21は、ユーザから指示され、設定したモードがキャリブレーションモードであるかを判定する。
【0064】
キャリブレーションモードが設定されている場合、ステップS1においてYESであると判定されて、処理はステップS2に進む。
【0065】
ステップS2において、送信BF部22は、1つの振動子31に対して送信ビームフォーミングを行う。すなわち、送信BF部22は、1つの振動子31を送信対象の振動子31として駆動して、当該振動子31から超音波ビームを送信するための信号を形成する。このとき、送受信切り替え部23は、スイッチの位置を送信BF部22側に切り替える。
【0066】
ステップS3において、プローブ24の送信対象の振動子31(例えば、振動子31−1)は、送信BF部22によりステップS2で形成された信号に基づく超音波ビームを発生し、送信する。
【0067】
ステップS4において、送受信切り替え部23は、スイッチの位置を送信BF部22側から受信BF部25側に切り替えることにより、送受信を切り替える。
【0068】
ステップS5において、各振動子31は、ステップS3において送信された超音波ビームに対応する反射波を受信する。各振動子31は、受信した反射波の信号を、受信BF部25に供給する。
【0069】
ステップS6において、受信BF部25は、受信ビームフォーミングを行う。すなわち、受信BF部25は、各振動子31から供給された反射波の信号を、各振動子31の基準配列を直列固定状態、すなわち位置ずれが存在しない配列であると仮定してそれぞれ遅延させる。
【0070】
ステップS7において、受信BF部25は、位相差を算出する。すなわち、受信BF部25は、ステップS6において遅延された各振動子31の信号列で相関を計算して、位相差を算出する。受信BF部25は、算出した位相差を、遅延計算部26に供給する。より具体的には、ステップS6の受信ビームフォーミングにおいては、図2Aの右側と図2Bの右側との差分を求める演算と等価な処理が実行されて、図2Cの左側の信号がそれぞれ出力されることになる。この図2Cの左側の信号の各位相差は、各振動子31の位置ずれを示していることになる。すなわち、各振動子31の位置ずれを示す位相差が、ステップS7の処理で算出される。
【0071】
ステップS8において、遅延計算部26は、遅延量を更新する。遅延計算部26は、受信BF部25から供給された位相差(すなわち、各振動子の位置ずれ)を、前回までの処理で供給された位相差(すなわち、各振動子の位置ずれ)と平均化して、各振動子31の位相差を算出する。そして、遅延計算部26は、算出した位相差(すなわち、平均化された各振動子の位置ずれ)に基づいて、送信ビームフォーミングおよび受信ビームフォーミングのそれぞれの遅延量を計算し、計算された遅延量を上書きすることによって、遅延量の更新を行う。
【0072】
ステップS9において、送信BF部22は、全ての振動子31の処理が終了したか、すなわち全ての振動子31から超音波ビームが送信されたかを判定する。
【0073】
まだ全ての振動子31から超音波ビームが送信されていない場合、ステップS9においてNOであると判定されて、処理はステップS10に進む。
【0074】
ステップS10において、送信BF部22は、送信ビームフォーミングの対象とする振動子31を変更する。例えば、次の振動子31−2に変更される。その後、処理はステップS2に戻され、それ以降の処理が繰り返される。すなわち、全ての振動子31の各々による送信ビームフォーミングが繰り返し実行され、その都度、ステップS2乃至S10のループ処理が繰り返されることで、送信ビームフォーミングおよび受信ビームフォーミングのそれぞれの遅延量が更新されていく。
【0075】
全ての振動子31の処理が終了した場合、ステップS9においてYESであると判定されて、処理はステップS11に進む。
【0076】
ステップS11において、モード制御部21は、実測モードに切り替える。すると、処理はステップS1に戻される。
【0077】
ステップS1において、モード制御部21は、設定されているモードがキャリブレーションモードであるかを判定する。
【0078】
いまの場合、実測モードが設定されているので、ステップS1においてNOであると判定されて、処理はステップS12に進む。
【0079】
ステップS12において、超音波診断装置20は、実測処理を行う。実測処理の詳細について図5を参照して説明する。
【0080】
図5は、実測処理の流れを説明するフローチャートである。
【0081】
ステップS21において、送信BF部22は、複数の振動子31に対して送信ビームフォーミングを行う。すなわち、送信BF部22は、各振動子31から送信する超音波ビームが、最後の回(すなわち、直前の回)のステップS8で遅延計算部26により算出(すなわち、キャリブレーション処理時の最終更新)された遅延量分だけ遅延して送信されるように、各振動子31から送信される超音波ビームを形成するための信号を生成する。このとき、送受信切り替え部23は、スイッチの位置を送信BF部22側に切り替える。
【0082】
ステップS22において、各振動子31は、送信BF部22によりステップS21で形成された信号に基づく超音波ビームを発生し、送信する。
【0083】
ステップS23において、送受信切り替え部23は、スイッチの位置を送信BF部22側から受信BF部25側に切り替えることにより、送受信を切り替える。
【0084】
ステップS24において、各振動子31は、ステップS22において送信された超音波ビームに対応する反射波を受信する。各振動子31は、受信した反射波の信号を、受信BF部25に供給する。
【0085】
ステップS25において、受信BF部25は、受信ビームフォーミングを行う。すなわち、受信BF部25は、各振動子31が受信した反射波の信号を、最後の回(すなわち、直前の回)のステップS8で遅延計算部26により更新(すなわち、キャリブレーション処理時の最終更新)された遅延量分だけ遅延させながら加算する整相加算処理を行うことによって受信波の位相をそろえ、反射波検出信号を生成する。受信BF部25は、反射波検出信号を信号処理部27に供給する。
【0086】
ステップS26において、信号処理部27は、受信BF部25から供給される反射波検出信号に基づいて、測定対象の超音波画像の信号を生成する。
【0087】
ステップS27において、表示部28は、ステップS26で信号処理部27により生成された信号に基づく超音波画像を表示する。これにより実測処理は終了する。
【0088】
図4のフローチャートに戻り、以上のステップS12の実測処理が終了すると、超音波信号処理は終了する。
【0089】
[第2のキャリブレーション処理]
図4の例のキャリブレーション処理(以下、第1のキャリブレーション処理と称する)においては、1回の送信ビームフォーミングにおいて超音波ビームが送信される振動子31の数、すなわち送信対象の振動子31は1つであった。しかしながら、この場合、1つの振動子31から送信された超音波ビームは拡散するため、送信方向の真下にある対象点Fだけではなく、様々な位置にある対象点に当たって反射する場合がある。受信対象の振動子31が、様々な位置にある対象点からの反射波を受信した場合、第1のキャリブレーション処理の精度が低くなり、各振動子31の相対的な位置関係が正しく算出されないおそれがある。
【0090】
そこで、超音波診断装置10は、1回の送信ビームフォーミングにおいて複数の振動子31の組を送信対象の振動子31として、当該複数の振動子31から超音波ビームを送信する第2のキャリブレーション処理を実行することができる。超音波診断装置10は、このような第2のキャリブレーション処理の繰り返し処理を、複数の振動子31の組を変化させて実行する。これにより、振動子31の相対的な位置関係の算出の精度をより向上させることができる。第2のキャリブレーション処理について、図6乃至図8を参照して説明する。
【0091】
図6は、第2のキャリブレーション処理における振動子の配置を示す図である。図6においては、5つの振動子31−1乃至31−5が一組として、第2のキャリブレーションン処理が繰り返し実行される。
【0092】
具体的には、図6の状態C1は、振動子31−1乃至31−5の実際の配置状態を表わしている。ただし、振動子31−1乃至31−5の配置はまだ推定されておらず、その相対的な位置関係はまだ不明な状態である。
【0093】
はじめに、送信BF部22は、振動子31−1乃至31−5の配置を、状態C0に示されるような直列固定状態であると仮定して、すなわち直列固定状態を基準配列として超音波ビームの信号を形成する。そして、状態C0の配置であると仮定された振動子31−1乃至31−5から超音波ビームが送信される。
【0094】
そして、受信BF部25及び遅延計算部26は、振動子31−1乃至31−5の各々の受信波に対して受信ビームフォーミングを行い、出力された各信号の相関に基づいて位相差(すなわち、各振動子31の位置ずれの推定量)を算出する。このようにして算出された位相差に基づく、振動子31−1乃至31−5の配置の推定位置を示す状態が、図6の状態C2である。
【0095】
ここで、状態C0の配置であると仮定した振動子31−1乃至31−5から送信された超音波ビームは、対象点Fに当たり反射する。しかしながら、この場合、振動子31−1乃至31−5から送信された超音波ビームは、仮定した配置でビームフォーミングされているため(超音波ビームの信号が形成されているため)、正しく絞られていないので拡散し、対象点F以外の対象点にも当たり反射する。したがって、対象点Fからの反射波に基づいて算出される位相差は、雑音が多く精度が低いものとなる。すなわち、図6の状態C0示す、振動子31−1乃至31−5の配置の推定位置(すなわち、位置ずれの推定量)における、実際の配置位置(すなわち、実際の位置ずれ)に対する誤差は、大きいものとなる。
【0096】
そこで、次に、送信BF部22は、振動子31−1乃至31−5の配置を状態C2であると仮定して、すなわち状態C2を基準配列として超音波ビームの信号を形成する。具体的には、状態C1における振動子31−1,31−5の配置位置を仮想的に変更して、状態C2の配置であると仮定する。そして、状態C2の配置であると仮定された振動子31−1乃至31−5から超音波ビームが送信される。
【0097】
そして、受信BF部25及び遅延計算部26は、振動子31−1乃至31−5の各々の受信波に対して受信ビームフォーミングを行い、出力された各信号の相関に基づいて位相差(すなわち、各振動子31の位置ずれの推定量)を再度算出する。このようにして再度算出された位相差に基づく、振動子31−1乃至31−5の配置の推定位置を示す状態が、図6の状態C3である。
【0098】
ここで、状態C3に示す、振動子31−1乃至31−5の配置の推定位置(すなわち、位置ずれの推定量)における、実際の配置位置(すなわち、実際の位置ずれ)に対する誤差は、状態C2の配置の場合の誤差と比較して小さくなっている。これは次の理由による。
【0099】
すなわち、状態C2の配置であると仮定した振動子31−1乃至31−5から送信された超音波ビームは、対象点Fに当たり反射する。また、この場合も、振動子31−1乃至31−5から送信された超音波ビームは、対象点F以外の対象点にも当たり反射する。しかしながら、振動子31の配置が状態C2の配置であると仮定した場合に送信される超音波ビームは、振動子31の配置が状態C0の配置であると仮定した場合に送信される超音波ビームと比較すると、絞られたものになっている。したがって、振動子31の配置が状態C2の配置であると仮定した場合に送信される超音波ビームの、対象点F以外の対象点からの反射波は減少するからである。
【0100】
そこで、次に、送信BF部22は、振動子31−1乃至31−5の配置を、状態C3であると仮定して、すなわち状態C3を基準配列として超音波ビームの信号を形成する。具体的には、状態C2における振動子31−5の配置位置を仮想的に変更して、状態C3の配置であると仮定する。そして、状態C3の配置であると仮定された振動子31−1乃至31−5から超音波ビームが送信される。
【0101】
このように、各振動子31の配置位置の推定位置を正解(すなわち、実際の配置位置)に近付けながら、位相差(すなわち、位置ずれの推定量)を計算する第2のキャリブレーション処理を繰り返し実行することで、各振動子31から送信される超音波ビームを絞ることができる。すなわち、各振動子31から送信される超音波ビームにより波面が合成され、仮想的に凹状に配置された振動子31から超音波ビームが送信される状態となるので、超音波ビームが絞られる。これにより、対象点F以外の対象点からの反射波が低減されるので、第2のキャリブレーション処理の精度を向上させることができる。
【0102】
また、各振動子31から送信される超音波ビームが絞られるということは、音圧が集中することと等価である。したがって、対象点Fからの反射波の音圧も高くなる。さらに、各振動子31の配置位置の推定位置が正解(すなわち、実際の配置位置)に近づくので、受信BF部25による整相加算処理の位相差が少なくなり、加算される音圧が高くなる。したがって、測定対象の測定の精度を向上させることができる。
【0103】
[第2のキャリブレーション処理の繰り返し回数]
ここで、第2のキャリブレーション処理の繰り返し回数について説明する。
【0104】
図7は、第2のキャリブレーション処理の繰り返し回数と、対象点Fからの反射波の音圧の関係とを示す図である。図7において、縦軸は、対象点Fからの反射波の音圧を示しており、横軸は、第2のキャリブレーション処理の繰り返し回数を示している。
【0105】
図7に示されるように、各振動子31の配置位置の推定位置を正解(すなわち、実際の配置位置)に近付けるように変化させながら、位相差(すなわち、位置ずれの推定量)を計算する第2のキャリブレーション処理の繰り返し回数が増えていく毎に、対象点Fからの反射波の音圧は変化する。
【0106】
ここで、上述したように、各振動子31の配置位置の推定位置が正解(すなわち、実際の配置位置)に近づくにつれ、対象点Fからの反射波の音圧が高くなる。すなわち、各振動子31の配置位置の推定位置が正解に近づいている間は、音圧の変化は上昇方向(正の方向)に向かっている。そして、理想的には、各振動子31の配置位置の推定位置が正解に一致すると、対象点Fからの反射波の音圧は最高値になり、それ以降、第2のキャリブレーションの処理が繰り返されても、各振動子31の配置位置の推定位置が正解に一致し続けるならば、音圧も最高値を保ったまま変化しないことになる。すなわち、対象点Fからの反射波の音圧の変化量がほぼ無くなれば、各振動子31の配置位置の推定位置が正解にほぼ一致したとして、第2のキャリブレーションの繰り返しを停止させるとよい。或いはまた、対象点Fからの反射波の音圧の変化が上昇方向(正の方向)から下降方向(負の方向)に変化した場合は、各振動子31の配置位置の推定位置が正解から離れる方向に向かうことを意味しているので、音圧の変化が負の方向に変化した時点で(すなわち、変極点で)、第2のキャリブレーションの繰り返しを停止させるとよい。
【0107】
そこで、対象点Fからの反射波の音圧の変化量が所定の閾値よりも低くなるか、または変化が負の方向に変化したときを収束条件として、第2のキャリブレーション処理の繰り返し回数を決定することができる。なお、この場合、第2のキャリブレーション処理の繰り返し回数の上限も予め決めておく。
【0108】
次に、上述の収束条件に用いられる対象点Fの決定の手法について説明する。1列に配列された各振動子31に対して、どれくらい離れた距離にある対象点Fを収束条件に用いるかは、例えば、次のようにして決定することができる。
【0109】
中心点と、その中心点に対して水平方向に左右に1画素分ずつずらした2点との集合を、複数組抽出する。次に、各集合毎に、3点の音圧をそれぞれ求め、中心点の音圧が最高となる集合を、対象点Fが含まれる集合の候補として抽出する。この場合、垂直方向に幾つもの候補が抽出されるので、これらの候補の中から、最も音圧が高い中心点を、対象点Fとして決定する。
【0110】
[超音波信号処理]
次に、第2のキャリブレーション処理を含む超音波信号処理について、図8を参照して説明する。
【0111】
図8は、第2のキャリブレーション処理を含む超音波信号処理の流れを説明するフローチャートである。
【0112】
ステップS41において、モード制御部21は、ユーザから指示され、設定したモードがキャリブレーションモードであるかを判定する。
【0113】
キャリブレーションモードが設定されている場合、ステップS41においてYESであると判定されて、処理はステップS42に進む。
【0114】
ステップS42において、送信BF部22は、複数の振動子に対して送信ビームフォーミングを行う。すなわち、初回のステップS42の処理では、送信BF部22は、複数の振動子を送信対象の振動子として駆動して、当該複数の振動子の基準配列を直列固定状態、すなわち位置ずれが存在しない配列であると仮定して超音波ビームを送信するための信号を形成する。また、2回目以降のステップS42の処理では、送信BF部22は、複数の振動子を送信対象の振動子として駆動して、当該複数の振動子が直前の回のステップS47の処理で算出された位相差により特定される各振動子31の配置位置(すなわち、各振動子31の配置位置の推定位置)の状態であると仮定して、当該配置位置を基準配列として超音波ビームを送信するための信号を形成する。このとき、送受信切り替え部23は、スイッチの位置を送信BF部22側に切り替える。
【0115】
ステップS43において、プローブ24の複数の振動子31(例えば、振動子31−1乃至31−5)は、送信BF部22によりステップS42で形成された信号に基づく超音波ビームを発生し、送信する。
【0116】
ステップS44において、送受信切り替え部23は、スイッチの位置を送信BF部22側から受信BF部25側に切り替えることにより、送受信を切り替える。
【0117】
ステップS45において、各振動子31は、ステップS43において送信された超音波ビームに対応する反射波を受信する。各振動子31は、受信した反射波の信号を、受信BF部25に供給する。
【0118】
ステップS46において、受信BF部25は、受信ビームフォーミングを行う。すなわち、初回のステップS46の処理では、受信BF部25は、各振動子31から供給された反射波の信号を、各振動子31の基準配列を直列固定状態であると仮定してそれぞれ遅延させる。また、2回目以降のステップS46の処理では、受信BF部25は、各振動子31から供給された反射波の信号を、各振動子31の基準配列を直前の回のステップS47の処理で算出された位相差により特定される各振動子31の配置位置(すなわち、各振動子31の配置位置の推定位置)の状態であると仮定して、それぞれ遅延させる。
【0119】
ステップS47において、受信BF部25は、位相差を算出する。すなわち、受信BF部25は、ステップS46において遅延された各振動子31の信号列で相関を計算して、位相差を算出する。受信BF部25は、算出した位相差を、遅延計算部26に供給する。
【0120】
ステップS48において、遅延計算部26は、遅延量を更新する。遅延計算部26は、受信BF部25から供給された位相差(すなわち、各振動子の位置ずれ)を、前回までの処理で供給された位相差(すなわち、各振動子の位置ずれ)と平均化して、各振動子31の位相差を算出する。そして、遅延計算部26は、算出した位相差(すなわち、平均化された各振動子の位置ずれ)に基づいて、送信ビームフォーミングおよび受信ビームフォーミングのそれぞれの遅延量を算出し、算出された遅延量を上書きすることによって、遅延量の更新を行う。
【0121】
ステップS49において、受信BF部25は、収束条件を満たしたかを判定する。すなわち、受信BF部25は、対象点Fからの反射波の音圧の変化量が所定の閾値よりも小さくなったか、または負の値となったかを判定する。
【0122】
収束条件を満たしていない場合、ステップS49においてNOであると判定されて、処理はステップS42に戻され、それ以降の処理が繰り返される。すなわち、収束条件を満たすまでの間、ステップS42乃至S49のループ処理が繰り返される。なお、ステップS42乃至S49のループ処理が繰り返される間、各振動子31の配置位置の推定位置は、実際の配置位置に近づくように変化されながら位相差が算出される。そして、算出された位相差に基づいて遅延量が更新される。
【0123】
その後、収束条件を満たした場合、ステップS49においてYESであると判定されて、処理はステップS50に進む。
【0124】
ステップS50において、送信BF部22は、全ての振動子31の処理が終了したか、すなわち複数の振動子31の組からの超音波ビームの送信の処理が、全ての組においてなされたかを判定する。
【0125】
まだ全ての振動子31から超音波ビームが送信されていない場合、ステップS50においてNOであると判定されて、処理はステップ51に進む。
【0126】
ステップS51において、送信BF部22は、送信ビームフォーミングの対象とする振動子31の組を変更する。例えば、図示せぬ次の振動子31−6乃至31−10に変更される。その後、処理はステップS42に戻され、それ以降の処理が繰り返される。すなわち、全ての振動子31の組による送信ビームフォーミングが繰り返し実行され、その都度、ステップS42乃至S51のループ処理が繰り返されることで、送信ビームフォーミングおよび受信ビームフォーミングのそれぞれの遅延量が更新されていく。
【0127】
全ての振動子31の処理が終了した場合、ステップS50においてYESであると判定されて、処理はステップS52に進む。
【0128】
ステップS52において、モード制御部21は、実測モードに切り替える。すると、処理はステップS41に戻される。
【0129】
ステップS41において、モード制御部21は、設定されているモードがキャリブレーションモードであるかを判定する。
【0130】
いまの場合、実測モードが設定されているので、ステップS41においてNOであると判定されて、処理はステップS53に進む。
【0131】
ステップS53において、超音波診断装置20は、実測処理を行う。実測処理の詳細については、図5を用いて説明済みであり、重複するので省略する。
【0132】
ステップS53の実測処理が終了すると、第2のキャリブレーション処理を含む超音波信号処理は終了する。
【0133】
このように、各振動子31の配置位置の推定位置を正解(すなわち、実際の配置位置)に近付けながら、位相差(すなわち、位置ずれの推定量)を計算する第2のキャリブレーション処理を繰り返し実行することで、各振動子31から送信される超音波ビームを絞ることができる。これにより、対象点F以外の対象点からの反射波が低減されるので、第2のキャリブレーション処理の精度を向上させることができる。また、受信BF部25による整相加算処理の位相差が少なくなり、加算される音圧が高くなるので、測定対象の測定の精度を向上させることができる。
【0134】
なお、図8の第2のキャリブレーション処理を含む超音波信号処理が実行される前に、図4の第1のキャリブレーション処理を含む超音波信号処理が実行されるようにしてもよい。この場合、はじめに、第1のキャリブレーション処理を含む超音波信号処理によって、各振動子31の相対的な位置関係が算出される。したがって、算出された当該位置関係を各振動子31の配置の推定位置の初期状態として、第2のキャリブレーション処理を含む超音波信号処理が実行されることにより、第2のキャリブレーション処理の精度をより向上させることができる。
【0135】
[2次元配列の振動子]
各振動子31は、上述のように1次元アレイでもよいが、2次元アレイでもよい。2次元アレイの複数の振動子31として、例えば、cMUT(Capacitive Micro-machined Ultrasonic Transducers)に実装される微細構造の振動子を採用できる。cMUTは、MEMS(Micro-Electro-Mechanical systems)技術によって、微細構造の各振動子が、フレキシブル基板上に実装された超音波トランスデューサである。cMUTにおける各振動子31の形状は、特に限定されず、例えば、図9に示されるような形状であってもよい。
【0136】
図9は、cMUTを示す図である。図9Aには、フレキシブル基板41に円形の振動子31aが実装されて構成されるcMUT51aが示されている。図9Bには、フレキシブル基板41に四角形の振動子31bが実装されて構成されるcMUT51bが示されている。
【0137】
cMUTに用いられるフレキシブル基板41は、形状が自由に変形可能である。したがって、cMUTをプローブ24として用いる場合、その形状を、ベルト状、帯状、シート状等に整形することができる。しかしながら、cMUTにおいては、各振動子31が微細構造であることから、各振動子31の位置関係を算出するために、各振動子31にセンサを実装するのは困難である。そこで、本技術の手法をcMUTに適用することにより、センサを実装せずとも各振動子31の位置関係を算出することが可能となる。
【0138】
本技術の手法をcMUTに適用した場合の超音波信号処理は、基本的に上述の処理と同様である。ただし、この場合、各振動子31の構造が微細であることから、隣接する振動子31の位置関係は、ほぼ平面に位置すると仮定することができる。したがって、第2のキャリブレーション処理を含む超音波信号処理において、第2のキャリブレーション処理の繰り返し回数を増やさなくても、第2のキャリブレーション処理の精度を向上させることができる。
【0139】
第2のキャリブレーション処理においては、振動子31の位置関係が未知である場合、多くの振動子31から超音波ビームが送信されると、振動子31の配置の推定位置における、実際の振動子31の配置位置に対する誤差は、大きいものとなる。しかしながら、隣接する振動子31の位置関係を平面に位置すると仮定すると、振動子31の配置の推定の誤差をある程度抑制することが可能となる。したがって、第2のキャリブレーション処理がたとえ1回だけ実行されたとしても、第2のキャリブレーション処理の精度を向上させることができるのである。
【0140】
[機能ブロック]
さらに、例えば、位置関係が固定された複数の振動子31を1つの組(以下、このような組を機能ブロックと称する)として、複数の機能ブロックを定義して、これらの複数の機能ブロックの相互の位置関係を、本技術の手法により算出してもよい。
【0141】
図10は、複数の機能ブロックからなるプローブを示す図である。
【0142】
図10Aには、円形の振動子31cが示されている。なお、振動子31cの形状は、特に円形に限定されない。図10Bには、機能ブロック71が示されている。図10Cには、全部で15個の振動子31cからなるプローブ24cが示されている。プローブ24cは、3つの機能ブロック71−1乃至71−3から構成される。また、機能ブロック71−1乃至71−3には、それぞれ5つの振動子31が含まれる。具体的には、機能ブロック71−1には、振動子31c1乃至振動子31c5が含まれる。また、機能ブロック71−2には、振動子31c11乃至振動子31c15が含まれる。また、機能ブロック71−3には、振動子31c21乃至振動子31c25が含まれる。
【0143】
機能ブロック71−1乃至71−3にそれぞれ含まれる5つの振動子31cは、物理的に固定されていて、位置関係が変動しない。なお、5つの振動子31cは、振動子31c間で接続されることにより、物理的に固定されてもよい。また、機能ブロック71−1乃至71−3において、5つの振動子31cが実装される基板を非フレキシブル基板として、5つの振動子31cが非フレキシブル基板に実装されることにより、物理的に固定されてもよい。
【0144】
このような構成のブローブ24cにおいては、送信BF部22は、1回の送信ビームフォーミングにおいて、機能ブロック71−1乃至71−3の各々を1つの単位として超音波ビームを送信するキャリブレーション処理を実行する。そして、受信BF部25及び遅延計算部26は、機能ブロック71−1乃至71−3の各々を単位とする受信波に対して受信ビームフォーミングを行い、出力された各信号の相関に基づいて位相差を単位毎に算出する。このようにして単位毎に算出された位相差に基づいて、各単位間の相対的な位置関係、すなわち隣接する機能ブロック71−1乃至71−3間の相対的な位置関係を算出することができる。
【0145】
このように、本技術の手法においては、センサを実装せずとも、振動子間の相対的な位置関係の取得が可能になる。したがって、本技術の手法においては、フレキシブルプローブを採用したとしても、センサを実装しない簡単な構成でビームフォーミングの実現が可能になる。
【0146】
[本技術のプログラムへの適用]
上述した一連の処理は、ハードウエアにより実行することもできるし、ソフトウエアにより実行することもできる。一連の処理をソフトウエアにより実行する場合には、そのソフトウエアを構成するプログラムが、コンピュータにインストールされる。ここで、コンピュータには、専用のハードウエアに組み込まれているコンピュータや、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピュータなどが含まれる。
【0147】
図11は、上述した一連の処理をプログラムにより実行するコンピュータのハードウエアの構成例を示すブロック図である。
【0148】
コンピュータにおいて、CPU(Central Processing Unit)101,ROM(Read Only Memory)102,RAM(Random Access Memory)103は、バス104により相互に接続されている。
【0149】
バス104には、さらに、入出力インタフェース105が接続されている。入出力インタフェース105には、入力部106、出力部107、記憶部108、通信部109、及びドライブ110が接続されている。
【0150】
入力部106は、キーボード、マウス、マイクロフォンなどよりなる。出力部107は、ディスプレイ、スピーカなどよりなる。記憶部108は、ハードディスクや不揮発性のメモリなどよりなる。通信部109は、ネットワークインタフェースなどよりなる。ドライブ110は、磁気ディスク、光ディスク、光磁気ディスク、又は半導体メモリなどのリムーバブルメディア111を駆動する。
【0151】
以上のように構成されるコンピュータでは、CPU101が、例えば、記憶部108に記憶されているプログラムを、入出力インタフェース105及びバス104を介して、RAM103にロードして実行することにより、上述した一連の処理が行われる。
【0152】
コンピュータ(CPU101)が実行するプログラムは、例えば、パッケージメディア等としてのリムーバブルメディア111に記録して提供することができる。また、プログラムは、ローカルエリアネットワーク、インターネット、デジタル衛星放送といった、有線または無線の伝送媒体を介して提供することができる。
【0153】
コンピュータでは、プログラムは、リムーバブルメディア111をドライブ110に装着することにより、入出力インタフェース105を介して、記憶部108にインストールすることができる。また、プログラムは、有線または無線の伝送媒体を介して、通信部109で受信し、記憶部108にインストールすることができる。その他、プログラムは、ROM102や記憶部108に、あらかじめインストールしておくことができる。
【0154】
なお、コンピュータが実行するプログラムは、本明細書で説明する順序に沿って時系列に処理が行われるプログラムであっても良いし、並列に、あるいは呼び出しが行われたとき等の必要なタイミングで処理が行われるプログラムであっても良い。
【0155】
本技術の実施の形態は、上述した実施の形態に限定されるものではなく、本技術の要旨を逸脱しない範囲において種々の変更が可能である。
【0156】
例えば、本技術は、1つの機能をネットワークを介して複数の装置で分担、共同して処理するクラウドコンピューティングの構成をとることができる。
【0157】
また、上述のフローチャートで説明した各ステップは、1つの装置で実行する他、複数の装置で分担して実行することができる。
【0158】
さらに、1つのステップに複数の処理が含まれる場合には、その1つのステップに含まれる複数の処理は、1つの装置で実行する他、複数の装置で分担して実行することができる。
【0159】
なお、本技術は、以下のような構成もとることができる。
(1)
相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の前記複数の振動子における反射波の信号の各位相差と、前記複数の振動子の配列が基準配列であると仮定した場合の前記複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、前記複数の振動子間の相対的な位置ずれを示す位相差を算出する位相差算出部と、
前記位相差算出部により算出された前記位相差に基づいて、ビームフォーミングで用いる、前記複数の振動子の各々の遅延量を計算する遅延計算部と
を備える信号処理装置。
(2)
前記位相差算出部によって、前記位置ずれを示す前記位相差の算出が1回行われる毎に、前記複数の振動子のうちの1つが前記送信対象として選択される
前記(1)に記載の信号処理装置。
(3)
前記位相差算出部によって、前記位置ずれを示す前記位相差の算出が1回行われる毎に、前記複数の振動子のうちの2つ以上が前記送信対象として選択される
前記(1)または(2)に記載の信号処理装置。
(4)
前記位相差算出部は、前記複数の振動子の位置ずれが存在しない配列を前記基準配列として採用する
前記(1)乃至(3)のいずれかに記載の信号処理装置。
(5)
前記位相差算出部は、前記位置ずれを示す前記位相差の算出が、初回の場合には、前記複数の振動子の位置ずれが存在しない配列を前記基準配列として採用し、2回目以降の場合には、前回に算出した前記位相差が示す位置ずれが存在した状態の前記複数の振動子の配列を、前記基準配列として採用する
前記(1)乃至(4)のいずれかに記載の信号処理装置。
(6)
前記複数の振動子は、1次元に配列されている
前記(1)乃至(5)のいずれかに記載の信号処理装置。
(7)
前記複数の振動子は、2次元に配列されている
前記(1)乃至(6)のいずれかに記載の信号処理装置。
(8)
前記複数の振動子が、所定の数の前記振動子の組を機能ブロックとして、複数の機能ブロックに分割され、
前記位相差算出手段は、前記機能ブロックを単位として、前記位置ずれを示す前記位相差を前記単位毎に算出する
前記(1)乃至(7)のいずれかに記載の信号処理装置。
【0160】
本技術は、コンテンツを編集する編集装置に適用することができる。
【符号の説明】
【0161】
10 超音波診断装置, 21 モード制御部, 22 送信BF部, 23 送受信切り替え部, 24 プローブ, 25 受信BF部, 26 遅延計算部, 27 信号処理部, 28 表示部, 31 振動子, 41 フレキシブル基板, 51a,51b cMUT, 71 機能ブロック
【特許請求の範囲】
【請求項1】
相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の前記複数の振動子における反射波の信号の各位相差と、前記複数の振動子の配列が基準配列であると仮定した場合の前記複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、前記複数の振動子間の相対的な位置ずれを示す位相差を算出する位相差算出部と、
前記位相差算出部により算出された前記位相差に基づいて、ビームフォーミングで用いる、前記複数の振動子の各々の遅延量を計算する遅延計算部と
を備える信号処理装置。
【請求項2】
前記位相差算出部によって、前記位置ずれを示す前記位相差の算出が1回行われる毎に、前記複数の振動子のうちの1つが前記送信対象として選択される
請求項1に記載の信号処理装置。
【請求項3】
前記位相差算出部によって、前記位置ずれを示す前記位相差の算出が1回行われる毎に、前記複数の振動子のうちの2つ以上が前記送信対象として選択される
請求項1に記載の信号処理装置。
【請求項4】
前記位相差算出部は、前記複数の振動子の位置ずれが存在しない配列を前記基準配列として採用する
請求項2に記載の信号処理装置。
【請求項5】
前記位相差算出部は、前記位置ずれを示す前記位相差の算出が、初回の場合には、前記複数の振動子の位置ずれが存在しない配列を前記基準配列として採用し、2回目以降の場合には、前回に算出した前記位相差が示す位置ずれが存在した状態の前記複数の振動子の配列を、前記基準配列として採用する
請求項3に記載の信号処理装置。
【請求項6】
前記複数の振動子は、1次元に配列されている
請求項1に記載の信号処理装置。
【請求項7】
前記複数の振動子は、2次元に配列されている
請求項1に記載の信号処理装置。
【請求項8】
前記複数の振動子が、所定の数の前記振動子の組を機能ブロックとして、複数の機能ブロックに分割され、
前記位相差算出手段は、前記機能ブロックを単位として、前記位置ずれを示す前記位相差を前記単位毎に算出する
請求項1に記載の信号処理装置。
【請求項9】
前記信号処理装置が、
相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の前記複数の振動子における反射波の信号の各位相差と、前記複数の振動子の配列が基準配列であると仮定した場合の前記複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、前記複数の振動子間の相対的な位置ずれを示す位相差を算出し、
算出された前記位相差に基づいて、ビームフォーミングで用いる、前記複数の振動子の各々の遅延量を計算する
ステップを含む信号処理方法。
【請求項10】
相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の前記複数の振動子における反射波の信号の各位相差と、前記複数の振動子の配列が基準配列であると仮定した場合の前記複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、前記複数の振動子間の相対的な位置ずれを示す位相差を算出し、
算出された前記位相差に基づいて、ビームフォーミングで用いる、前記複数の振動子の各々の遅延量を計算する
ステップを含むプログラムが記録されている記録媒体。
【請求項11】
コンピュータを、
相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の前記複数の振動子における反射波の信号の各位相差と、前記複数の振動子の配列が基準配列であると仮定した場合の前記複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、前記複数の振動子間の相対的な位置ずれを示す位相差を算出する位相差算出部と、
前記位相差算出部により算出された前記位相差に基づいて、ビームフォーミングで用いる、前記複数の振動子の各々の遅延量を計算する遅延計算部と
して機能させるためのプログラム。
【請求項1】
相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の前記複数の振動子における反射波の信号の各位相差と、前記複数の振動子の配列が基準配列であると仮定した場合の前記複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、前記複数の振動子間の相対的な位置ずれを示す位相差を算出する位相差算出部と、
前記位相差算出部により算出された前記位相差に基づいて、ビームフォーミングで用いる、前記複数の振動子の各々の遅延量を計算する遅延計算部と
を備える信号処理装置。
【請求項2】
前記位相差算出部によって、前記位置ずれを示す前記位相差の算出が1回行われる毎に、前記複数の振動子のうちの1つが前記送信対象として選択される
請求項1に記載の信号処理装置。
【請求項3】
前記位相差算出部によって、前記位置ずれを示す前記位相差の算出が1回行われる毎に、前記複数の振動子のうちの2つ以上が前記送信対象として選択される
請求項1に記載の信号処理装置。
【請求項4】
前記位相差算出部は、前記複数の振動子の位置ずれが存在しない配列を前記基準配列として採用する
請求項2に記載の信号処理装置。
【請求項5】
前記位相差算出部は、前記位置ずれを示す前記位相差の算出が、初回の場合には、前記複数の振動子の位置ずれが存在しない配列を前記基準配列として採用し、2回目以降の場合には、前回に算出した前記位相差が示す位置ずれが存在した状態の前記複数の振動子の配列を、前記基準配列として採用する
請求項3に記載の信号処理装置。
【請求項6】
前記複数の振動子は、1次元に配列されている
請求項1に記載の信号処理装置。
【請求項7】
前記複数の振動子は、2次元に配列されている
請求項1に記載の信号処理装置。
【請求項8】
前記複数の振動子が、所定の数の前記振動子の組を機能ブロックとして、複数の機能ブロックに分割され、
前記位相差算出手段は、前記機能ブロックを単位として、前記位置ずれを示す前記位相差を前記単位毎に算出する
請求項1に記載の信号処理装置。
【請求項9】
前記信号処理装置が、
相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の前記複数の振動子における反射波の信号の各位相差と、前記複数の振動子の配列が基準配列であると仮定した場合の前記複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、前記複数の振動子間の相対的な位置ずれを示す位相差を算出し、
算出された前記位相差に基づいて、ビームフォーミングで用いる、前記複数の振動子の各々の遅延量を計算する
ステップを含む信号処理方法。
【請求項10】
相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の前記複数の振動子における反射波の信号の各位相差と、前記複数の振動子の配列が基準配列であると仮定した場合の前記複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、前記複数の振動子間の相対的な位置ずれを示す位相差を算出し、
算出された前記位相差に基づいて、ビームフォーミングで用いる、前記複数の振動子の各々の遅延量を計算する
ステップを含むプログラムが記録されている記録媒体。
【請求項11】
コンピュータを、
相対位置が固定されていない複数の振動子のうち、送信対象の振動子から送信された超音波の前記複数の振動子における反射波の信号の各位相差と、前記複数の振動子の配列が基準配列であると仮定した場合の前記複数の振動子における反射波の信号の既知の各位相差との差分に基づいて、前記複数の振動子間の相対的な位置ずれを示す位相差を算出する位相差算出部と、
前記位相差算出部により算出された前記位相差に基づいて、ビームフォーミングで用いる、前記複数の振動子の各々の遅延量を計算する遅延計算部と
して機能させるためのプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−75072(P2013−75072A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−217369(P2011−217369)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]