
信号処理装置
【課題】 レーダと、ESMによる目標探知・識別を同時に行なうシステムにおいて、レーダ送信中は、ESMによる受信が行なえないため、ESMにて受信したパルスに不可視領域が生じる。このような状況下でも、目標を正しく探知することを目的とする。
【解決手段】 信号同期手段13からレーダ送信時に発生するESMでの不可視領域の時刻を知らせる同期信号を作成し、ESM用A/D変換同期手段4にて、信号同期手段13からの同期信号に基づいてESMからの受信信号に不可視領域を示すフラグを付加する。ESM用信号処理判定手段5にて、ESM受信信号からパルス諸元を算出する際に、不可視領域を示すフラグに基づいてパルスが有効か否かを判定する。目標追尾識別手段12にて、有効と判定されたパルス情報に基づいて、目標識別や目標追尾を行なう。
【解決手段】 信号同期手段13からレーダ送信時に発生するESMでの不可視領域の時刻を知らせる同期信号を作成し、ESM用A/D変換同期手段4にて、信号同期手段13からの同期信号に基づいてESMからの受信信号に不可視領域を示すフラグを付加する。ESM用信号処理判定手段5にて、ESM受信信号からパルス諸元を算出する際に、不可視領域を示すフラグに基づいてパルスが有効か否かを判定する。目標追尾識別手段12にて、有効と判定されたパルス情報に基づいて、目標識別や目標追尾を行なう。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダとESM(Electronic Support Measures)による目標探知、追尾、識別を同時に行なう信号処理装置に関するものである。
【背景技術】
【0002】
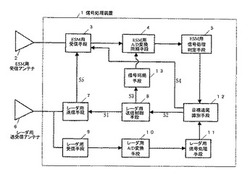
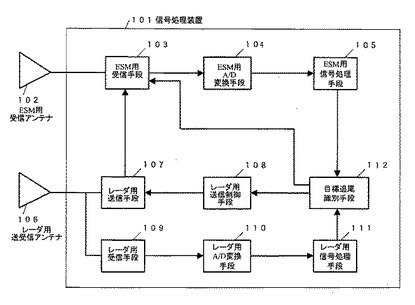
図6は、従来のレーダとESMによる目標探知、追尾、識別を同時に行なう信号処理装置の一例を示す構成図である。図6において、ESM用受信アンテナ102およびレーダ用送受信アンテナ106は、信号処理装置101に接続される。信号処理装置101は、ESM用受信手段103、ESM用A/D変換手段104、ESM用信号処理手段105、レーダ用送信手段107、レーダ用送信制御手段108、レーダ用受信手段109、レーダ用A/D変換手段110、レーダ用信号処理手段111、および目標追尾識別手段112を備えている。
【0003】
ESM用受信手段103は、目標追尾識別手段112からの指示に基づいて、ESM用受信アンテナ102の方位、受信する周波数帯等を決め、ESM用受信アンテナ102を制御する。ESM用受信アンテナ102で受信された外部からの受信信号は、ESM用受信手段103で増幅、位相検波された後、ESM用A/D変換手段104でディジタルビデオ信号に変換され、ESM用信号処理手段105に送られる。受信信号に周期的なパルス信号があった場合には、ESM用信号処理手段105は、各パルス信号の周波数、振幅、到来時刻等の諸元を算出し、算出結果を目標追尾識別手段112に送る。
【0004】
また、レーダ用送信制御手段108は、目標追尾識別手段112からの指示に基づいて、レーダで目標探索・追尾を行なうレーダ送信波の周波数帯、パルス間隔、パルス幅等の諸元を決め、レーダ送信手段107に諸元データを送る。レーダ用送信手段107は、諸元データに基づいて送信パルス信号を発生させ、送信パルス信号はレーダ用送受信アンテナ106から外部に放出される。送信パルス信号は、目標等に到達した後反射し、反射された信号がレーダ用送受信アンテナ106で受信される。
【0005】
レーダ用送受信アンテナ106で受信された受信信号(反射波)は、レーダ用受信手段109で増幅、位相検波された後、レーダ用A/D変換手段110でディジタルビデオ信号に変換され、レーダ用信号処理手段111に送られる。レーダ用信号処理手段111は、受信信号の中の反射されたパルス信号の周波数、振幅、到来時刻等の諸元を算出し、算出結果を目標追尾識別手段112に送る。
【0006】
目標追尾識別手段112は、ESM用信号処理手段105とレーダ用信号処理手段111から送られてきた各受信パルスの諸元から、クラッタ等を除去し目標を探知する。また、ESMからのパルス諸元から目標の識別を行なう。さらに、パルス諸元を時系列に処理することで目標の追尾を行い、ESM用受信アンテナ102とレーダ用送受信アンテナ106を向ける方位とレーダ送信波の諸元を定め、必要な情報をESM用受信手段103とレーダ用送信手段107に送る。
【0007】
なお、従来のESMおよびレーダを搭載した信号処理装置に関連する従来例として、特許文献1に、レーダ信号処理装置と、ESM信号処理装置を併用したシステムが示されている。また、特許文献2には、アクティブフェーズドアレーアンテナの開口面をn個に分割して、n個の機能(レーダ、電波妨害、ESM等)を割り付けるシステムが示されている。
【0008】
【特許文献1】特開2001-264420公報
【特許文献2】特開2001-7640公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
レーダと、ESMによる目標探知・識別を同時に行なうシステムにおいて、レーダ送信中は、レーダアンテナからESMアンテナへの漏れ込みや回り込みが発生する。航空機や飛しょう体等に搭載するESM装置は遠方の目標が送信する微弱なレーダパルス波の受信を目的としていることが多く、レーダアンテナとESMアンテナ間の距離が近いため、自身の送信するレーダ信号の漏れ込みや回り込みの電力の方が目標からの受信電力に比べて極端に大きくなる。このため、ESM側の受信装置が破損する恐れもあり、レーダ送信中はESM側の受信手段を停止する。例えば、従来の信号処理装置101では、レーダ用送信手段107は、自身のレーダ送信時に、レーダ送信中を示す信号をESM用受信手段103に送り、ESM用受信手段103での受信動作を停止させる。
【0010】
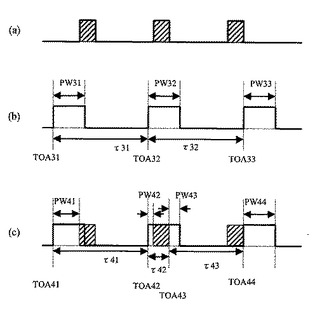
上記のように、レーダ送信中は、ESM用アンテナによる目標パルスの受信ができないため、ESMにて受信したパルスに不可視領域が生じる。図7は自身のレーダ送信信号によりESM受信信号に不可視領域(ブラインド)が生じた状態を説明するための図である。図7の(a)は自身のレーダが送信する送信パルス、(b)は目標が送信したパルス波をディジタル化して表現したものである。実際には複素数の多bitの信号となるが、ここでは簡略化のためパルスの振幅値を1bitで表現し、信号が高い状態(1の状態)をパルスあり、信号が低い状態(0の状態)を信号なし(白色雑音のみ受信)とする。また、図7の(c)も(b)と同様であるが、この図では(a)の送信パルスを重ねている。
【0011】
レーダ送信中で無ければ、ESMアンテナでは(b)のようなパルスが受信され、各パルスの到来時刻(TOA: Time of Arrival)は、TOA31,TOA32,TOA33、パルス幅はPW31,PW32,PW33と検知され、パルス間隔(PRI: Pulse Repetitional Interval)はTOAからτ31,τ32と算出される。しかし、レーダ送信中では不可視領域が生じるため、(c)のように、各パルスは欠落ないし分断されて、TOAは、TOA41,TOA42,TOA43,TOA44、パルス幅はPW41,PW42,PW43,PW44となり、PRIは、τ41,τ42,τ43と算出される。
【0012】
受信信号がクラッタか、同一の目標から発信されたものか判定する際に、同一のパルス幅を複数回受信してから同一のパルス間隔を複数回受信する等の手順をとる。このため、上記の(c)のようなパルスが検知された場合、パルス幅、PRI共にまちまちであり、クラッタと認識されてしまうという問題があった。
【0013】
上記のような場合、自身のレーダ送信時間、間隔は目標との相対距離等により変化し、ESMが受信する目標からのパルス信号も常に変化するため、受信したパルスが不可視領域により形成されたものか、また、不可視領域でどのようなパルスが受信されたかを単純には推定できない。このため、ESM受信信号から目標の諸元(パルス幅、パルス間隔等)を正確に復元することは出来ない。
【0014】
この発明は、かかる問題点を解決するためになされたものであり、レーダと、ESMによる目標探知、識別を同時に行なうシステムにおいて、ESM受信信号に自身のレーダ送信信号による不可視領域が生じた場合であっても、目標を正しく探知することを目的とする。
【課題を解決するための手段】
【0015】
この発明によれば、レーダとESM(Electronic Support Measures)による目標探知および識別を同時に行なうシステムにおいて、自身のレーダ送信時に発生する前記ESMの受信不可視領域の時刻を知らせる信号同期手段と、前記信号同期手段からの同期信号に基づいて前記ESMからの受信信号に不可視領域を示すフラグを付加するESM用A/D変換同期手段と、前記ESM用A/D変換同期手段が付加した不可視領域を示すフラグに基づいて、前記ESMからの受信信号から得られるパルスが有効か否かを判定し、判定結果に基づいてパルスの諸元情報を出力するESM用信号処理判定手段と、前記ESM用信号処理判定手段が出力したパルスの諸元情報に基づいて、目標識別および目標追尾を行なう目標追尾識別手段と、を備えたものである。
【発明の効果】
【0016】
この発明によれば、自身のレーダ送信を示す同期信号を発生し、この同期信号によりレーダ送信中に生じるESM受信信号の不可視領域を識別して、無効なパルスを除くことができるため、誤ったパルス諸元を利用して目標の識別等をすることが無くなり、適切な信号のみで目標の識別、追尾処理を行うことができるという効果が得られる。
【発明を実施するための最良の形態】
【0017】
実施の形態1.
この発明に係る実施の形態1について、図を用いて説明する。
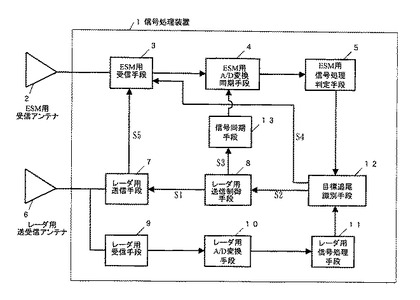
図1は、実施の形態1による信号処理装置1の構成を説明するブロック図である。図1において、信号処理装置1は、ESM用受信アンテナ2およびレーダ用送受信アンテナ6が接続されて、レーダとESMの信号処理を行なう。ESM用受信アンテナ2は目標からの信号を受信する。ESM用受信手段3はESM用受信アンテナ2で受信した信号について増幅、位相検波等の信号処理を行なう。ESM用A/D変換同期手段4はESM用受信手段3の出力するアナログ信号をディジタル信号に変換する。ESM用信号処理判定手段5はESM用A/D変換同期手段4の出力結果から目標の諸元情報を算出する。レーダ用送受信アンテナ6はレーダ送信波を送信し目標からの反射波を受信する。レーダ用送信手段7は送信パルス信号の諸元データS1に基づいてレーダ用送受信アンテナ6が送信する送信パルス信号を発生し、高出力信号に増幅する。レーダ用送信制御手段8は目標追尾識別手段12からの指示情報S2に基づいて、レーダ用送信手段7が発生する送信パルス信号の諸元を決め、レーダ用送信手段7に送信パルス信号の諸元データS1を送信する。また、レーダ用送信制御手段8は同期信号を生成するためのレーダ送信開始時刻の情報S3を信号同期手段13に送信する。レーダ用受信手段9はレーダ用送受信アンテナ6で受信した目標からの反射波を増幅・位相検波等する。レーダ用A/D変換手段10はレーダ用受信手段9の出力するアナログ信号をディジタル信号に変換する。レーダ用信号処理手段11はレーダ用A/D変換手段10の出力結果から受信信号の諸元情報を算出する。目標追尾識別手段12はESM用信号処理判定手段5からの目標の諸元情報と、レーダ用信号処理手段11の受信信号の諸元情報とから、目標を識別し追尾する。また、目標追尾識別手段12はESM用受信手段3に対しESM用受信アンテナ2の方位、受信する周波数帯等の指示情報S4を送り、レーダ用送信制御手段8に対しレーダを照射する方位・距離等の指示情報S2を送る。信号同期手段13はレーダ送信時に発生するESMでの不可視領域との同期信号を生成し、生成した同期信号をESM用A/D変換同期手段4に送る。
【0018】
図1のESM用受信アンテナ2とレーダ用送受信アンテナ6には、アレイ状に並べられた放射素子の給電位相を電気的に制御するか又は放射素子を電気的に選択することにより所望の方向に所望のタイミングで送受信ビームを形成することが可能なフェーズドアレイアンテナ等を用いることができる。
【0019】
次に、動作について説明する。
図1において、レーダ用送信制御手段8は、目標追尾識別手段12からの指示情報S2に基づいて、レーダで目標探索・追尾を行なうレーダ送信波の周波数帯、パルス間隔、パルス幅等の諸元を決め、レーダ用送信手段7に諸元データS1を送る。レーダ用送信手段7は、この諸元データS1に基づいて送信パルス信号を発生し、発生した送信パルス信号がレーダ用送受信アンテナ6から外部に放出される。外部に放出された送信パルス信号は、目標等に到達した後反射し、反射された信号がレーダ用送受信アンテナ6で受信される。
【0020】
レーダ用送受信アンテナ6で受信された受信信号(目標からの反射波)は、レーダ用受信手段9で増幅、位相検波された後、レーダ用A/D変換手段10でアナログ信号からディジタルビデオ信号に変換され、レーダ用信号処理手段11に送られる。レーダ用信号処理手段11は、受信信号の中の反射されたパルス信号の周波数、振幅、到来時刻等の諸元を算出し、算出結果を目標追尾識別手段12に送る。目標追尾識別手段12は、得られた諸元情報から目標までの距離と目標との相対速度を算出し、目標の移動先を予測して追尾を行い、次のレーダを照射する方位・距離等を定めレーダ用送信制御手段8に指示情報S2を送信する。レーダでの目標探索・追尾ではこれらの処理を繰り返す。
【0021】
前記のレーダ送信の動作とは独立して、ESM用受信手段3は、目標追尾識別手段12からの指示情報S4に基づいて、ESM用受信アンテナ2の方位、受信する周波数帯等を決め、ESM用受信アンテナ2を制御する。ESM用受信アンテナ2で受信された外部からの受信信号は、ESM用受信手段3で増幅、位相検波された後、ESM用A/D変換同期手段4でディジタルビデオ信号に変換され、ESM用信号処理判定手段5に送られる。受信信号に周期的なパルス信号等があった場合には、ESM用信号処理判定手段5は、各パルス信号の周波数、振幅、到来時刻、パルス幅等の諸元情報を算出し、算出結果を目標追尾識別手段12に送る。目標追尾識別手段12は、これらの諸元情報からESM用受信手段3に探索する方位・周波数帯などを指示するための指示情報S4を送信する。また、目標が探知された場合は、レーダでの探索に切り替える等の判断をする。
【0022】
また、レーダ用送信手段7は、自身のレーダ送信時に、レーダ送信中を示す信号S5をESM用受信手段3に送り、ESM用受信手段3での受信動作を停止させる。ESM用受信手段3の受信動作停止中は、ESM用受信手段3からESM用A/D変換同期手段4に白色雑音レベルの信号が送信される。さらに、レーダ送信時に、レーダ用送信制御手段8は、レーダ送信開始時刻の情報S3を信号同期手段13に送る。信号同期手段13は、ESM用A/D変換同期手段4にレーダ送信中を示す同期信号を送る。この際、レーダ用送信制御手段8からレーダ用送信手段7への転送遅延、ESM用受信手段3からESM用A/D変換同期手段4への転送遅延等を考慮して、信号同期手段13からESM用A/D変換同期手段4への同期信号の到着が、ESM用受信手段3からESM用A/D変換同期手段4への受信動作停止中の雑音レベルの信号の到着と同時になるようにする。
【0023】
ESM用A/D変換同期手段4は信号同期手段13からレーダ送信中を示す同期信号が来た際に、A/D変換されたディジタルビデオ信号にレーダ送信中に受信された信号であることを示すブラインドフラグをつけて、ESM用信号処理判定手段5にディジタルビデオ信号を送る。ESM用信号処理判定手段5は、ディジタルビデオ信号からパルス幅、到来時刻を算出する際に、ブラインドフラグの付いた領域にかかるようなパルスがある場合、そのパルスのパルス幅と到来時刻は、目標の探知等には利用できない無効な情報と判断して、目標追尾識別手段12にブラインド状態の情報を付加してパルス幅、TOA等の情報を送る。
【0024】
目標追尾識別手段12は、ブラインド状態の目標は識別・追尾等には利用しないようにする。また、ブラインド状態の探知情報しかない場合等で追尾に利用できる情報が少ない場合は、同一方向、同一周波数帯の探知を再度行なう等の判断をし、ESM用受信手段3等に制御情報を送る。
【0025】
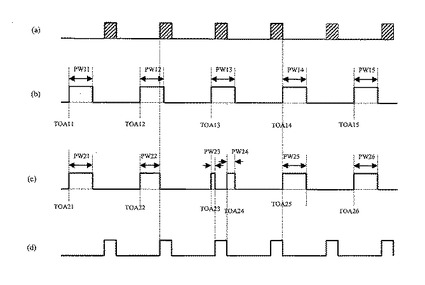
次に、レーダ送信中のESM用A/D変換同期手段4とESM用信号処理判定手段5での細部の動作について、図2、図3を用いて説明する。図2は自身のレーダ送信信号と、レーダ送信信号によりESM受信信号に不可視領域(ブラインド)が生じた状態を説明するための図である。図3は、実施の形態1におけるESM用信号処理判定手段でのパルスの検知結果を示す図である。ここで、図2の(a)は、自身のレーダが送信する送信パルス、図2の(b)は目標が送信したパルス波をディジタル化して表現したものである。図2の(c)は自身のレーダ送信による不可視領域が入り、ESM用A/D変換同期手段4に送られる信号を示す。図2の(d)は信号同期手段13からESM用A/D変換同期手段4に送られる、レーダ送信中を示す同期信号を示すものである。なお、図2(b)、(c)において、実際には複素数の多bitの信号となるが、ここでは簡略化のためパルスの振幅値を1bitで表現し、信号が高い状態(1の状態)をパルスあり、信号が低い状態(0の状態)を信号なし(白色雑音のみ受信)とする。
【0026】
レーダ送信中の場合、ESM用アンテナ2では図2の(b)のようなパルスが受信されるが、ESM用受信手段3で増幅・位相検波する際に、レーダ送信による不可視領域が入り、ESM用A/D変換同期手段4に信号が送られる際には図2の(c)のような信号となる。また、信号同期手段13からESM用A/D変換同期手段4に、図2の(d)のような、レーダ送信中を示す同期信号が送られる。なお、実際には、図2の(b)と(c)の間には、ESM用受信手段3からESM用A/D変換同期手段4に送信される際の時間遅延が生じ、(a)と(d)にも信号同期手段13で同期をとる分の時間差が生じるが、ここでは説明を容易にするため省略する。
【0027】
ESM用A/D変換同期手段4では、図2の(c)の信号をディジタル化する際に、(d)の同期信号をブラインドフラグとして追加してESM用信号処理判定手段5に送る。実際には、多bitのディジタルデータに、ブラインドフラグを1bit追加する等の処理を行なう。
【0028】
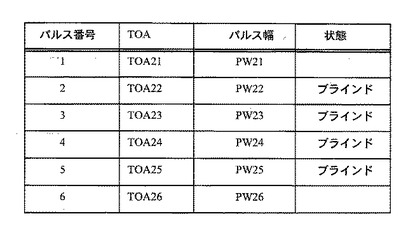
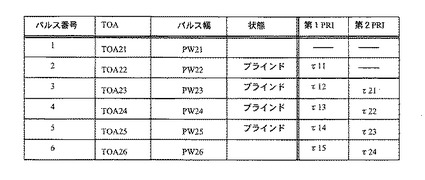
ESM用信号処理判定手段5では、ESM用A/D変換同期手段4から送られてきた信号からパルスを検知して、図3のようなパルス幅とTOA等の諸元を算出するとともに、ブラインドフラグを復元する。この際に、各パルスの先頭、もしくはパルスの末尾にブラインドフラグがかかるようなパルスは、ブラインドを示す状態を付加する。図2の(c)のパルスの例では、2番目と3番目のパルスの末尾、4番目と5番目のパルスの先頭にブラインドフラグがかかるため、2〜5番目のパルスがブラインド状態として出力される。
【0029】
目標追尾識別手段12では、ESM用信号処理判定手段5から送られてきた図3の結果から目標の識別等の処理を行なう。図3の場合、2〜5番目のパルスがブラインド状態のため、目標の識別等には利用しないようにする。また、PRIの算出は2つのパルスのTOAの差をとるため、図3の1番目と2番目のパルス間のPRI、5番目と6番目のパルス間のPRIも、ブラインド状態と判断されて、目標の識別等には利用されない。この後、目標追尾識別手段12でブラインド状態ではないパルスのみを利用して識別等を行なう。また、ブラインド状態のパルスしかない場合は、それらのパルス幅等を利用して単なる誤警報か識別不能か等の判断を行い、これらのパルスが識別不能のパルスと判定されて場合には再度同じ領域を探知し、全てノイズ等による誤検知と判断された場合には次の領域への探知に移行する。
【0030】
以上のように、本実施の形態1によれば、レーダとESM(Electronic Support Measures)による目標探知および識別を同時に行なうシステムにおいて、自身のレーダ送信時に発生する前記ESMの受信不可視領域の時刻を知らせる信号同期手段と、前記信号同期手段からの同期信号に基づいて前記ESMからの受信信号に不可視領域を示すフラグを付加するESM用A/D変換同期手段と、前記ESM用A/D変換同期手段が付加した不可視領域を示すフラグに基づいて、前記ESMからの受信信号から得られるパルスが有効か否かを判定し、判定結果に基づいてパルスの諸元情報を出力するESM用信号処理判定手段と、前記ESM用信号処理判定手段が出力したパルスの諸元情報に基づいて、目標識別および目標追尾を行なう目標追尾識別手段と、を備えることを特徴とする。
【0031】
この構成により、レーダ送信を示す同期信号に基づいて、レーダ送信中に生じるESM受信信号の不可視領域を正しく識別し、無効なパルスを除くことができるため、誤ったパルス諸元を利用して目標の識別等をすることが無くなり、適切な信号のみで目標の識別、追尾等の処理ができるという効果が得られる。これにより、誤警報を削減することができ、レーダ・ESMシステムの探知性能向上という効果が得られる。また、不要な処理を減らせるため、識別・追尾処理装置の演算を削減でき、装置の軽量化できるという効果が得られる。
【0032】
実施の形態2.
図1、図3〜図5を用いて、実施の形態2について説明する。図4は、実施の形態2におけるESM受信信号とTOA,PRI,パルス幅の関係を示す図である。図5は、実施の形態2における目標追尾識別手段での各パルスのPRI算出の結果を示す図である。上述の実施の形態1では、レーダ送信を示す同期信号によりレーダ送信中に生じるESM受信信号の不可視領域を正しく識別し、ブラインドされたパルスを除くことにより、適切な信号のみを処理するようにしていた。しかし、ブラインドされたパルスを利用して諸元情報を抽出し、目標識別等に利用することもできる。
【0033】
この実施の形態2における信号処理装置のブロック構成自体は、実施の形態1の図1に示した構成と同様である。また、動作については、目標追尾識別手段12での処理以外は、実施の形態1の動作と同じである。
【0034】
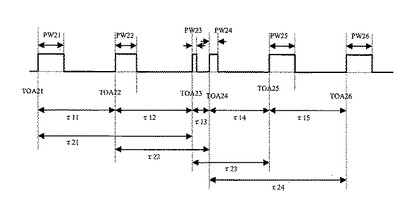
次に、レーダ送信中に図3のようなブラインド状態の探知結果をESM用信号処理判定手段5から受け取った場合の目標追尾識別手段12の動作について説明する。目標追尾識別手段12は図3のような探知結果を受け取った際、PRIを算出するときに、隣接するパルスだけでなく、図4のように1個飛びに隣接するパルスのPRI(1個飛びのPRI)も算出する。図4では、隣接するパルスのPRIは、τ11〜τ15であり、1個飛びのPRIは、τ21〜τ24となる。ここで、各々のPRIは、2つのTOAの差であり、次式1〜4のようになる。
【0035】
【数1】

【0036】
目標追尾識別手段12はこれらの演算結果を図5のように算出する。図5で隣接するPRIは第1PRI、1個飛びのPRIは第2PRIとした。
【0037】
次に、目標追尾識別手段12は、図5の結果の中で、同一のPRIを探す。図4、図5では、τ11,τ12,τ23,τ15が同値のPRIとなる。次に、目標追尾識別手段12は、これらのPRIと対応するTOAを抽出する。この場合、TOAとPRIの関係から、連続したパルスであると判断され、目標識別に利用される。例えば、τ23がτ11,τ12,τ15と同一のPRIであること、τ23がTOA23とTOA25から得られなおかつTOA23とTOA25の間にTOA24があることから、TOA23とTOA24が連続したパルスであると判明する。
【0038】
また、上記の例では、第2PRIまでを算出したが、第nPRIまで算出して、目標識別に利用するしてもよい。この場合、1つのパルスが複数に分断されていても正しいPRIを算出できる。また、上記の例では、同値のPRIを抽出したが、抽出するPRIにある程度の誤差を許容するようにしても良い。例えば、2つのPRIの差がΔε以下であれば、同一諸元のPRIとみなして、目標識別に利用する。この場合、パルスの先頭がブラインドによりΔε分だけ欠けるような場合でも、正しい諸元を抽出できる。
【0039】
以上のように、本実施の形態2によれば、目標追尾識別手段12が、ESMの受信不可視領域を含む複数のパルスの諸元情報から、パルス間隔の候補を複数作成し、同一のパルス間隔の諸元情報に基づいて目標識別および目標追尾を行なうことを特徴とする。この際、レーダ送信中に生じるESM受信信号のブラインド状態のパルスのTOAの諸元から、PRIの候補を算出して、同一のPRIを抽出することにより、有効なパルス諸元を利用することができるため、ブラインド状態のパルスであっても目標の識別等ができるという効果が得られる。これにより、探知した目標を失うことを回避することができ、レーダ・ESMシステムの探知性能向上という効果が得られる。
【図面の簡単な説明】
【0040】
【図1】この発明の実施の形態1における信号処理装置の構成を示す図である。
【図2】この発明の実施の形態1におけるレーダ送信信号とESM受信信号とブラインド状態を示す図である。
【図3】この発明の実施の形態1におけるESM用信号処理判定手段でのパルスの検知結果を示す図である。
【図4】この発明の実施の形態2におけるESM受信信号とTOA,PRI,パルス幅の関係を示す図である。
【図5】この発明の実施の形態2における目標追尾識別手段での各パルスのPRI算出の結果を示す図である。
【図6】従来の信号処理装置を説明する説明図である。
【図7】従来の信号処理装置でのレーダ送信信号とESM受信信号とブラインド状態を示す図である。
【符号の説明】
【0041】
1 信号処理装置、2 ESM用受信アンテナ、3 ESM用受信手段、4 ESM用A/D変換同期手段、5 ESM用信号処理判定手段、6 レーダ用送受信アンテナ、7 レーダ用送信手段、8 レーダ用送信制御手段、9 レーダ用受信手段、10 レーダ用A/D変換手段、11 レーダ用信号処理手段、12 目標追尾識別手段、13 信号同期手段、101 信号処理装置、102 ESM用受信アンテナ、103 ESM用受信手段、104 ESM用A/D変換同期手段、105 ESM信号処理手段、106 レーダ用送受信アンテナ、107 レーダ用送信手段、108 レーダ用送信制御手段、109 レーダ用受信手段、110 レーダ用A/D変換手段、111 レーダ用信号処理手段、112 目標追尾手段。
【技術分野】
【0001】
本発明は、レーダとESM(Electronic Support Measures)による目標探知、追尾、識別を同時に行なう信号処理装置に関するものである。
【背景技術】
【0002】
図6は、従来のレーダとESMによる目標探知、追尾、識別を同時に行なう信号処理装置の一例を示す構成図である。図6において、ESM用受信アンテナ102およびレーダ用送受信アンテナ106は、信号処理装置101に接続される。信号処理装置101は、ESM用受信手段103、ESM用A/D変換手段104、ESM用信号処理手段105、レーダ用送信手段107、レーダ用送信制御手段108、レーダ用受信手段109、レーダ用A/D変換手段110、レーダ用信号処理手段111、および目標追尾識別手段112を備えている。
【0003】
ESM用受信手段103は、目標追尾識別手段112からの指示に基づいて、ESM用受信アンテナ102の方位、受信する周波数帯等を決め、ESM用受信アンテナ102を制御する。ESM用受信アンテナ102で受信された外部からの受信信号は、ESM用受信手段103で増幅、位相検波された後、ESM用A/D変換手段104でディジタルビデオ信号に変換され、ESM用信号処理手段105に送られる。受信信号に周期的なパルス信号があった場合には、ESM用信号処理手段105は、各パルス信号の周波数、振幅、到来時刻等の諸元を算出し、算出結果を目標追尾識別手段112に送る。
【0004】
また、レーダ用送信制御手段108は、目標追尾識別手段112からの指示に基づいて、レーダで目標探索・追尾を行なうレーダ送信波の周波数帯、パルス間隔、パルス幅等の諸元を決め、レーダ送信手段107に諸元データを送る。レーダ用送信手段107は、諸元データに基づいて送信パルス信号を発生させ、送信パルス信号はレーダ用送受信アンテナ106から外部に放出される。送信パルス信号は、目標等に到達した後反射し、反射された信号がレーダ用送受信アンテナ106で受信される。
【0005】
レーダ用送受信アンテナ106で受信された受信信号(反射波)は、レーダ用受信手段109で増幅、位相検波された後、レーダ用A/D変換手段110でディジタルビデオ信号に変換され、レーダ用信号処理手段111に送られる。レーダ用信号処理手段111は、受信信号の中の反射されたパルス信号の周波数、振幅、到来時刻等の諸元を算出し、算出結果を目標追尾識別手段112に送る。
【0006】
目標追尾識別手段112は、ESM用信号処理手段105とレーダ用信号処理手段111から送られてきた各受信パルスの諸元から、クラッタ等を除去し目標を探知する。また、ESMからのパルス諸元から目標の識別を行なう。さらに、パルス諸元を時系列に処理することで目標の追尾を行い、ESM用受信アンテナ102とレーダ用送受信アンテナ106を向ける方位とレーダ送信波の諸元を定め、必要な情報をESM用受信手段103とレーダ用送信手段107に送る。
【0007】
なお、従来のESMおよびレーダを搭載した信号処理装置に関連する従来例として、特許文献1に、レーダ信号処理装置と、ESM信号処理装置を併用したシステムが示されている。また、特許文献2には、アクティブフェーズドアレーアンテナの開口面をn個に分割して、n個の機能(レーダ、電波妨害、ESM等)を割り付けるシステムが示されている。
【0008】
【特許文献1】特開2001-264420公報
【特許文献2】特開2001-7640公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
レーダと、ESMによる目標探知・識別を同時に行なうシステムにおいて、レーダ送信中は、レーダアンテナからESMアンテナへの漏れ込みや回り込みが発生する。航空機や飛しょう体等に搭載するESM装置は遠方の目標が送信する微弱なレーダパルス波の受信を目的としていることが多く、レーダアンテナとESMアンテナ間の距離が近いため、自身の送信するレーダ信号の漏れ込みや回り込みの電力の方が目標からの受信電力に比べて極端に大きくなる。このため、ESM側の受信装置が破損する恐れもあり、レーダ送信中はESM側の受信手段を停止する。例えば、従来の信号処理装置101では、レーダ用送信手段107は、自身のレーダ送信時に、レーダ送信中を示す信号をESM用受信手段103に送り、ESM用受信手段103での受信動作を停止させる。
【0010】
上記のように、レーダ送信中は、ESM用アンテナによる目標パルスの受信ができないため、ESMにて受信したパルスに不可視領域が生じる。図7は自身のレーダ送信信号によりESM受信信号に不可視領域(ブラインド)が生じた状態を説明するための図である。図7の(a)は自身のレーダが送信する送信パルス、(b)は目標が送信したパルス波をディジタル化して表現したものである。実際には複素数の多bitの信号となるが、ここでは簡略化のためパルスの振幅値を1bitで表現し、信号が高い状態(1の状態)をパルスあり、信号が低い状態(0の状態)を信号なし(白色雑音のみ受信)とする。また、図7の(c)も(b)と同様であるが、この図では(a)の送信パルスを重ねている。
【0011】
レーダ送信中で無ければ、ESMアンテナでは(b)のようなパルスが受信され、各パルスの到来時刻(TOA: Time of Arrival)は、TOA31,TOA32,TOA33、パルス幅はPW31,PW32,PW33と検知され、パルス間隔(PRI: Pulse Repetitional Interval)はTOAからτ31,τ32と算出される。しかし、レーダ送信中では不可視領域が生じるため、(c)のように、各パルスは欠落ないし分断されて、TOAは、TOA41,TOA42,TOA43,TOA44、パルス幅はPW41,PW42,PW43,PW44となり、PRIは、τ41,τ42,τ43と算出される。
【0012】
受信信号がクラッタか、同一の目標から発信されたものか判定する際に、同一のパルス幅を複数回受信してから同一のパルス間隔を複数回受信する等の手順をとる。このため、上記の(c)のようなパルスが検知された場合、パルス幅、PRI共にまちまちであり、クラッタと認識されてしまうという問題があった。
【0013】
上記のような場合、自身のレーダ送信時間、間隔は目標との相対距離等により変化し、ESMが受信する目標からのパルス信号も常に変化するため、受信したパルスが不可視領域により形成されたものか、また、不可視領域でどのようなパルスが受信されたかを単純には推定できない。このため、ESM受信信号から目標の諸元(パルス幅、パルス間隔等)を正確に復元することは出来ない。
【0014】
この発明は、かかる問題点を解決するためになされたものであり、レーダと、ESMによる目標探知、識別を同時に行なうシステムにおいて、ESM受信信号に自身のレーダ送信信号による不可視領域が生じた場合であっても、目標を正しく探知することを目的とする。
【課題を解決するための手段】
【0015】
この発明によれば、レーダとESM(Electronic Support Measures)による目標探知および識別を同時に行なうシステムにおいて、自身のレーダ送信時に発生する前記ESMの受信不可視領域の時刻を知らせる信号同期手段と、前記信号同期手段からの同期信号に基づいて前記ESMからの受信信号に不可視領域を示すフラグを付加するESM用A/D変換同期手段と、前記ESM用A/D変換同期手段が付加した不可視領域を示すフラグに基づいて、前記ESMからの受信信号から得られるパルスが有効か否かを判定し、判定結果に基づいてパルスの諸元情報を出力するESM用信号処理判定手段と、前記ESM用信号処理判定手段が出力したパルスの諸元情報に基づいて、目標識別および目標追尾を行なう目標追尾識別手段と、を備えたものである。
【発明の効果】
【0016】
この発明によれば、自身のレーダ送信を示す同期信号を発生し、この同期信号によりレーダ送信中に生じるESM受信信号の不可視領域を識別して、無効なパルスを除くことができるため、誤ったパルス諸元を利用して目標の識別等をすることが無くなり、適切な信号のみで目標の識別、追尾処理を行うことができるという効果が得られる。
【発明を実施するための最良の形態】
【0017】
実施の形態1.
この発明に係る実施の形態1について、図を用いて説明する。
図1は、実施の形態1による信号処理装置1の構成を説明するブロック図である。図1において、信号処理装置1は、ESM用受信アンテナ2およびレーダ用送受信アンテナ6が接続されて、レーダとESMの信号処理を行なう。ESM用受信アンテナ2は目標からの信号を受信する。ESM用受信手段3はESM用受信アンテナ2で受信した信号について増幅、位相検波等の信号処理を行なう。ESM用A/D変換同期手段4はESM用受信手段3の出力するアナログ信号をディジタル信号に変換する。ESM用信号処理判定手段5はESM用A/D変換同期手段4の出力結果から目標の諸元情報を算出する。レーダ用送受信アンテナ6はレーダ送信波を送信し目標からの反射波を受信する。レーダ用送信手段7は送信パルス信号の諸元データS1に基づいてレーダ用送受信アンテナ6が送信する送信パルス信号を発生し、高出力信号に増幅する。レーダ用送信制御手段8は目標追尾識別手段12からの指示情報S2に基づいて、レーダ用送信手段7が発生する送信パルス信号の諸元を決め、レーダ用送信手段7に送信パルス信号の諸元データS1を送信する。また、レーダ用送信制御手段8は同期信号を生成するためのレーダ送信開始時刻の情報S3を信号同期手段13に送信する。レーダ用受信手段9はレーダ用送受信アンテナ6で受信した目標からの反射波を増幅・位相検波等する。レーダ用A/D変換手段10はレーダ用受信手段9の出力するアナログ信号をディジタル信号に変換する。レーダ用信号処理手段11はレーダ用A/D変換手段10の出力結果から受信信号の諸元情報を算出する。目標追尾識別手段12はESM用信号処理判定手段5からの目標の諸元情報と、レーダ用信号処理手段11の受信信号の諸元情報とから、目標を識別し追尾する。また、目標追尾識別手段12はESM用受信手段3に対しESM用受信アンテナ2の方位、受信する周波数帯等の指示情報S4を送り、レーダ用送信制御手段8に対しレーダを照射する方位・距離等の指示情報S2を送る。信号同期手段13はレーダ送信時に発生するESMでの不可視領域との同期信号を生成し、生成した同期信号をESM用A/D変換同期手段4に送る。
【0018】
図1のESM用受信アンテナ2とレーダ用送受信アンテナ6には、アレイ状に並べられた放射素子の給電位相を電気的に制御するか又は放射素子を電気的に選択することにより所望の方向に所望のタイミングで送受信ビームを形成することが可能なフェーズドアレイアンテナ等を用いることができる。
【0019】
次に、動作について説明する。
図1において、レーダ用送信制御手段8は、目標追尾識別手段12からの指示情報S2に基づいて、レーダで目標探索・追尾を行なうレーダ送信波の周波数帯、パルス間隔、パルス幅等の諸元を決め、レーダ用送信手段7に諸元データS1を送る。レーダ用送信手段7は、この諸元データS1に基づいて送信パルス信号を発生し、発生した送信パルス信号がレーダ用送受信アンテナ6から外部に放出される。外部に放出された送信パルス信号は、目標等に到達した後反射し、反射された信号がレーダ用送受信アンテナ6で受信される。
【0020】
レーダ用送受信アンテナ6で受信された受信信号(目標からの反射波)は、レーダ用受信手段9で増幅、位相検波された後、レーダ用A/D変換手段10でアナログ信号からディジタルビデオ信号に変換され、レーダ用信号処理手段11に送られる。レーダ用信号処理手段11は、受信信号の中の反射されたパルス信号の周波数、振幅、到来時刻等の諸元を算出し、算出結果を目標追尾識別手段12に送る。目標追尾識別手段12は、得られた諸元情報から目標までの距離と目標との相対速度を算出し、目標の移動先を予測して追尾を行い、次のレーダを照射する方位・距離等を定めレーダ用送信制御手段8に指示情報S2を送信する。レーダでの目標探索・追尾ではこれらの処理を繰り返す。
【0021】
前記のレーダ送信の動作とは独立して、ESM用受信手段3は、目標追尾識別手段12からの指示情報S4に基づいて、ESM用受信アンテナ2の方位、受信する周波数帯等を決め、ESM用受信アンテナ2を制御する。ESM用受信アンテナ2で受信された外部からの受信信号は、ESM用受信手段3で増幅、位相検波された後、ESM用A/D変換同期手段4でディジタルビデオ信号に変換され、ESM用信号処理判定手段5に送られる。受信信号に周期的なパルス信号等があった場合には、ESM用信号処理判定手段5は、各パルス信号の周波数、振幅、到来時刻、パルス幅等の諸元情報を算出し、算出結果を目標追尾識別手段12に送る。目標追尾識別手段12は、これらの諸元情報からESM用受信手段3に探索する方位・周波数帯などを指示するための指示情報S4を送信する。また、目標が探知された場合は、レーダでの探索に切り替える等の判断をする。
【0022】
また、レーダ用送信手段7は、自身のレーダ送信時に、レーダ送信中を示す信号S5をESM用受信手段3に送り、ESM用受信手段3での受信動作を停止させる。ESM用受信手段3の受信動作停止中は、ESM用受信手段3からESM用A/D変換同期手段4に白色雑音レベルの信号が送信される。さらに、レーダ送信時に、レーダ用送信制御手段8は、レーダ送信開始時刻の情報S3を信号同期手段13に送る。信号同期手段13は、ESM用A/D変換同期手段4にレーダ送信中を示す同期信号を送る。この際、レーダ用送信制御手段8からレーダ用送信手段7への転送遅延、ESM用受信手段3からESM用A/D変換同期手段4への転送遅延等を考慮して、信号同期手段13からESM用A/D変換同期手段4への同期信号の到着が、ESM用受信手段3からESM用A/D変換同期手段4への受信動作停止中の雑音レベルの信号の到着と同時になるようにする。
【0023】
ESM用A/D変換同期手段4は信号同期手段13からレーダ送信中を示す同期信号が来た際に、A/D変換されたディジタルビデオ信号にレーダ送信中に受信された信号であることを示すブラインドフラグをつけて、ESM用信号処理判定手段5にディジタルビデオ信号を送る。ESM用信号処理判定手段5は、ディジタルビデオ信号からパルス幅、到来時刻を算出する際に、ブラインドフラグの付いた領域にかかるようなパルスがある場合、そのパルスのパルス幅と到来時刻は、目標の探知等には利用できない無効な情報と判断して、目標追尾識別手段12にブラインド状態の情報を付加してパルス幅、TOA等の情報を送る。
【0024】
目標追尾識別手段12は、ブラインド状態の目標は識別・追尾等には利用しないようにする。また、ブラインド状態の探知情報しかない場合等で追尾に利用できる情報が少ない場合は、同一方向、同一周波数帯の探知を再度行なう等の判断をし、ESM用受信手段3等に制御情報を送る。
【0025】
次に、レーダ送信中のESM用A/D変換同期手段4とESM用信号処理判定手段5での細部の動作について、図2、図3を用いて説明する。図2は自身のレーダ送信信号と、レーダ送信信号によりESM受信信号に不可視領域(ブラインド)が生じた状態を説明するための図である。図3は、実施の形態1におけるESM用信号処理判定手段でのパルスの検知結果を示す図である。ここで、図2の(a)は、自身のレーダが送信する送信パルス、図2の(b)は目標が送信したパルス波をディジタル化して表現したものである。図2の(c)は自身のレーダ送信による不可視領域が入り、ESM用A/D変換同期手段4に送られる信号を示す。図2の(d)は信号同期手段13からESM用A/D変換同期手段4に送られる、レーダ送信中を示す同期信号を示すものである。なお、図2(b)、(c)において、実際には複素数の多bitの信号となるが、ここでは簡略化のためパルスの振幅値を1bitで表現し、信号が高い状態(1の状態)をパルスあり、信号が低い状態(0の状態)を信号なし(白色雑音のみ受信)とする。
【0026】
レーダ送信中の場合、ESM用アンテナ2では図2の(b)のようなパルスが受信されるが、ESM用受信手段3で増幅・位相検波する際に、レーダ送信による不可視領域が入り、ESM用A/D変換同期手段4に信号が送られる際には図2の(c)のような信号となる。また、信号同期手段13からESM用A/D変換同期手段4に、図2の(d)のような、レーダ送信中を示す同期信号が送られる。なお、実際には、図2の(b)と(c)の間には、ESM用受信手段3からESM用A/D変換同期手段4に送信される際の時間遅延が生じ、(a)と(d)にも信号同期手段13で同期をとる分の時間差が生じるが、ここでは説明を容易にするため省略する。
【0027】
ESM用A/D変換同期手段4では、図2の(c)の信号をディジタル化する際に、(d)の同期信号をブラインドフラグとして追加してESM用信号処理判定手段5に送る。実際には、多bitのディジタルデータに、ブラインドフラグを1bit追加する等の処理を行なう。
【0028】
ESM用信号処理判定手段5では、ESM用A/D変換同期手段4から送られてきた信号からパルスを検知して、図3のようなパルス幅とTOA等の諸元を算出するとともに、ブラインドフラグを復元する。この際に、各パルスの先頭、もしくはパルスの末尾にブラインドフラグがかかるようなパルスは、ブラインドを示す状態を付加する。図2の(c)のパルスの例では、2番目と3番目のパルスの末尾、4番目と5番目のパルスの先頭にブラインドフラグがかかるため、2〜5番目のパルスがブラインド状態として出力される。
【0029】
目標追尾識別手段12では、ESM用信号処理判定手段5から送られてきた図3の結果から目標の識別等の処理を行なう。図3の場合、2〜5番目のパルスがブラインド状態のため、目標の識別等には利用しないようにする。また、PRIの算出は2つのパルスのTOAの差をとるため、図3の1番目と2番目のパルス間のPRI、5番目と6番目のパルス間のPRIも、ブラインド状態と判断されて、目標の識別等には利用されない。この後、目標追尾識別手段12でブラインド状態ではないパルスのみを利用して識別等を行なう。また、ブラインド状態のパルスしかない場合は、それらのパルス幅等を利用して単なる誤警報か識別不能か等の判断を行い、これらのパルスが識別不能のパルスと判定されて場合には再度同じ領域を探知し、全てノイズ等による誤検知と判断された場合には次の領域への探知に移行する。
【0030】
以上のように、本実施の形態1によれば、レーダとESM(Electronic Support Measures)による目標探知および識別を同時に行なうシステムにおいて、自身のレーダ送信時に発生する前記ESMの受信不可視領域の時刻を知らせる信号同期手段と、前記信号同期手段からの同期信号に基づいて前記ESMからの受信信号に不可視領域を示すフラグを付加するESM用A/D変換同期手段と、前記ESM用A/D変換同期手段が付加した不可視領域を示すフラグに基づいて、前記ESMからの受信信号から得られるパルスが有効か否かを判定し、判定結果に基づいてパルスの諸元情報を出力するESM用信号処理判定手段と、前記ESM用信号処理判定手段が出力したパルスの諸元情報に基づいて、目標識別および目標追尾を行なう目標追尾識別手段と、を備えることを特徴とする。
【0031】
この構成により、レーダ送信を示す同期信号に基づいて、レーダ送信中に生じるESM受信信号の不可視領域を正しく識別し、無効なパルスを除くことができるため、誤ったパルス諸元を利用して目標の識別等をすることが無くなり、適切な信号のみで目標の識別、追尾等の処理ができるという効果が得られる。これにより、誤警報を削減することができ、レーダ・ESMシステムの探知性能向上という効果が得られる。また、不要な処理を減らせるため、識別・追尾処理装置の演算を削減でき、装置の軽量化できるという効果が得られる。
【0032】
実施の形態2.
図1、図3〜図5を用いて、実施の形態2について説明する。図4は、実施の形態2におけるESM受信信号とTOA,PRI,パルス幅の関係を示す図である。図5は、実施の形態2における目標追尾識別手段での各パルスのPRI算出の結果を示す図である。上述の実施の形態1では、レーダ送信を示す同期信号によりレーダ送信中に生じるESM受信信号の不可視領域を正しく識別し、ブラインドされたパルスを除くことにより、適切な信号のみを処理するようにしていた。しかし、ブラインドされたパルスを利用して諸元情報を抽出し、目標識別等に利用することもできる。
【0033】
この実施の形態2における信号処理装置のブロック構成自体は、実施の形態1の図1に示した構成と同様である。また、動作については、目標追尾識別手段12での処理以外は、実施の形態1の動作と同じである。
【0034】
次に、レーダ送信中に図3のようなブラインド状態の探知結果をESM用信号処理判定手段5から受け取った場合の目標追尾識別手段12の動作について説明する。目標追尾識別手段12は図3のような探知結果を受け取った際、PRIを算出するときに、隣接するパルスだけでなく、図4のように1個飛びに隣接するパルスのPRI(1個飛びのPRI)も算出する。図4では、隣接するパルスのPRIは、τ11〜τ15であり、1個飛びのPRIは、τ21〜τ24となる。ここで、各々のPRIは、2つのTOAの差であり、次式1〜4のようになる。
【0035】
【数1】
【0036】
目標追尾識別手段12はこれらの演算結果を図5のように算出する。図5で隣接するPRIは第1PRI、1個飛びのPRIは第2PRIとした。
【0037】
次に、目標追尾識別手段12は、図5の結果の中で、同一のPRIを探す。図4、図5では、τ11,τ12,τ23,τ15が同値のPRIとなる。次に、目標追尾識別手段12は、これらのPRIと対応するTOAを抽出する。この場合、TOAとPRIの関係から、連続したパルスであると判断され、目標識別に利用される。例えば、τ23がτ11,τ12,τ15と同一のPRIであること、τ23がTOA23とTOA25から得られなおかつTOA23とTOA25の間にTOA24があることから、TOA23とTOA24が連続したパルスであると判明する。
【0038】
また、上記の例では、第2PRIまでを算出したが、第nPRIまで算出して、目標識別に利用するしてもよい。この場合、1つのパルスが複数に分断されていても正しいPRIを算出できる。また、上記の例では、同値のPRIを抽出したが、抽出するPRIにある程度の誤差を許容するようにしても良い。例えば、2つのPRIの差がΔε以下であれば、同一諸元のPRIとみなして、目標識別に利用する。この場合、パルスの先頭がブラインドによりΔε分だけ欠けるような場合でも、正しい諸元を抽出できる。
【0039】
以上のように、本実施の形態2によれば、目標追尾識別手段12が、ESMの受信不可視領域を含む複数のパルスの諸元情報から、パルス間隔の候補を複数作成し、同一のパルス間隔の諸元情報に基づいて目標識別および目標追尾を行なうことを特徴とする。この際、レーダ送信中に生じるESM受信信号のブラインド状態のパルスのTOAの諸元から、PRIの候補を算出して、同一のPRIを抽出することにより、有効なパルス諸元を利用することができるため、ブラインド状態のパルスであっても目標の識別等ができるという効果が得られる。これにより、探知した目標を失うことを回避することができ、レーダ・ESMシステムの探知性能向上という効果が得られる。
【図面の簡単な説明】
【0040】
【図1】この発明の実施の形態1における信号処理装置の構成を示す図である。
【図2】この発明の実施の形態1におけるレーダ送信信号とESM受信信号とブラインド状態を示す図である。
【図3】この発明の実施の形態1におけるESM用信号処理判定手段でのパルスの検知結果を示す図である。
【図4】この発明の実施の形態2におけるESM受信信号とTOA,PRI,パルス幅の関係を示す図である。
【図5】この発明の実施の形態2における目標追尾識別手段での各パルスのPRI算出の結果を示す図である。
【図6】従来の信号処理装置を説明する説明図である。
【図7】従来の信号処理装置でのレーダ送信信号とESM受信信号とブラインド状態を示す図である。
【符号の説明】
【0041】
1 信号処理装置、2 ESM用受信アンテナ、3 ESM用受信手段、4 ESM用A/D変換同期手段、5 ESM用信号処理判定手段、6 レーダ用送受信アンテナ、7 レーダ用送信手段、8 レーダ用送信制御手段、9 レーダ用受信手段、10 レーダ用A/D変換手段、11 レーダ用信号処理手段、12 目標追尾識別手段、13 信号同期手段、101 信号処理装置、102 ESM用受信アンテナ、103 ESM用受信手段、104 ESM用A/D変換同期手段、105 ESM信号処理手段、106 レーダ用送受信アンテナ、107 レーダ用送信手段、108 レーダ用送信制御手段、109 レーダ用受信手段、110 レーダ用A/D変換手段、111 レーダ用信号処理手段、112 目標追尾手段。
【特許請求の範囲】
【請求項1】
レーダとESM(Electronic Support Measures)による目標探知および識別を同時に行なうシステムにおいて、
自身のレーダ送信時に発生する前記ESMの受信不可視領域の時刻を知らせる信号同期手段と、
前記信号同期手段からの同期信号に基づいて前記ESMからの受信信号に不可視領域を示すフラグを付加するESM用A/D変換同期手段と、
前記ESM用A/D変換同期手段が付加した不可視領域を示すフラグに基づいて、前記ESMからの受信信号から得られるパルスが有効か否かを判定し、判定結果に基づいてパルスの諸元情報を出力するESM用信号処理判定手段と、
前記ESM用信号処理判定手段が出力したパルスの諸元情報に基づいて、目標識別および目標追尾を行なう目標追尾識別手段と、
を備えた信号処理装置。
【請求項2】
前記目標追尾識別手段は、ESMの受信不可視領域を含む複数のパルスの諸元情報から、パルス間隔の候補を複数作成し、同一のパルス間隔の諸元情報に基づいて目標識別および目標追尾を行なうことを特徴とする請求項1記載の信号処理装置。
【請求項1】
レーダとESM(Electronic Support Measures)による目標探知および識別を同時に行なうシステムにおいて、
自身のレーダ送信時に発生する前記ESMの受信不可視領域の時刻を知らせる信号同期手段と、
前記信号同期手段からの同期信号に基づいて前記ESMからの受信信号に不可視領域を示すフラグを付加するESM用A/D変換同期手段と、
前記ESM用A/D変換同期手段が付加した不可視領域を示すフラグに基づいて、前記ESMからの受信信号から得られるパルスが有効か否かを判定し、判定結果に基づいてパルスの諸元情報を出力するESM用信号処理判定手段と、
前記ESM用信号処理判定手段が出力したパルスの諸元情報に基づいて、目標識別および目標追尾を行なう目標追尾識別手段と、
を備えた信号処理装置。
【請求項2】
前記目標追尾識別手段は、ESMの受信不可視領域を含む複数のパルスの諸元情報から、パルス間隔の候補を複数作成し、同一のパルス間隔の諸元情報に基づいて目標識別および目標追尾を行なうことを特徴とする請求項1記載の信号処理装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−19678(P2010−19678A)
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2008−180280(P2008−180280)
【出願日】平成20年7月10日(2008.7.10)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成20年7月10日(2008.7.10)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]