
信号情報提供装置
【課題】信号機の通過可能性に関連して運転者が判断した走行計画に基づいて、運転者が主体的に運転操作を行えるようにする。
【解決手段】ディスプレイ10に表示、信号機の通過可能性を示すためのリング状の回転体K(K1、K2、K3)が表示される。リング状回転体Kは、1回転する時間が、信号機の全ての表示状態が一巡する1サイクルの時間とされる。リング状回転体Kに、信号機の青色表示時間割合に応じた周方向長さを有する青色表示領域α1が設定される。リング状回転体Kの手前中央が、信号機の現在時刻での表示状態に対応したものとされる。
【解決手段】ディスプレイ10に表示、信号機の通過可能性を示すためのリング状の回転体K(K1、K2、K3)が表示される。リング状回転体Kは、1回転する時間が、信号機の全ての表示状態が一巡する1サイクルの時間とされる。リング状回転体Kに、信号機の青色表示時間割合に応じた周方向長さを有する青色表示領域α1が設定される。リング状回転体Kの手前中央が、信号機の現在時刻での表示状態に対応したものとされる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、信号情報提供装置に関するものである。
【背景技術】
【0002】
道路の交差点には信号機が設置されて、この信号機の表示(例えば青色、赤色、黄色のいずれかの表示)にしたがって、車両は信号機のある交差点を通過したりその手前で停止する等を行うことになる。
【0003】
また、最近では、車両(の運転者)に対して、各種の運転支援のための情報を提供することも行われるようになっている。特許文献1には、信号機における現在の表示状態の残り時間(現在の表示状態から次の表示状態に切換わるまでの時間)を車両に提供するものが開示されている。特許文献2には、カーブ等を安全に走行できるようにするための推奨速度を提供することが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−170864号公報
【特許文献2】特開2005−234758号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、運転者にとって、走行計画、特に近い将来の走行計画の一環として、自車両の走行方向にある交差点を、例えば現在の車速を維持した状態で通過できるか否かを知ることが重要となる。しかしながら、特許文献1のものでは、信号機の表示状態が切換わるまでの残り時間が提供されるだけなので、走行計画に有効に活用することが難しいものとなる。また、特許文献2に記載の技術を応用して、次の信号機(のある交差点)を通過できるような推奨速度を運転者に提供することも考えられるが、この場合は、推奨速度を強要されるような感覚を運転者へ与えてしまい、運転者が主体的な運転操作を行なうという点では好ましくないものとなる。
【0006】
本発明は以上のような事情を勘案してなされたもので、その目的は、信号機の通過可能性に関連して運転者が判断した走行計画に基づいて、運転者が主体的に運転操作を行えるようにした信号情報提供装置を提供することにある。
【課題を解決するための手段】
【0007】
前記目的を達成するため、本発明にあっては、基本的に、リング状の回転体を表示することによって運転者に対して信号機の表示状態に関する情報を提供するようにしてある。そして、リング状回転体が1回転する時間を、信号機の全ての表示状態が切換えられる1サイクルの時間となるように対応づけてある。さらに、リング状回転体に、信号機の青色表示時間割合に応じた長さを識別させる表示を行うようにしてある。以上に加えて、リング状回転体の手前中央部分が信号機の現在の表示状態に対応したものとなるようにしてある(時刻の同期性)。
【0008】
具体的には、本発明にあっては次のような解決手法を採択してある。すなわち、特許請求の範囲における請求項1に記載のように、
自車両の走行方向にある信号機の通過可能性に関する情報を自車両の運転者に提供する信号情報提供装置であって、
リング状回転体を表示する表示手段を備え、
前記リング状回転体は、信号機が青色から再び青色になるまでの1サイクルの時間でもって1回転するように表示され、
前記リング状回転体には、前記1サイクルの時間に対する信号機の青色表示時間割合に応じた周方向長さを有する青色対応領域が設定され、
前記リング状回転体は、その手前中央部分に現在の信号機の表示状態が位置するように表示される、
ようにしてある。上記解決手法によれば、運転者は、リング状回転体における青色表示領域とリング状回転体の手前中央部との位置関係を把握しつつ、リング状回転体の回転速度をも勘案して、信号機の通過可能性を直感的に把握できるようになる。これにより、運転者は、信号機の通過可能性が高いと判断したときは現在の車速を維持したまま走行したり、やや速度を上げても通過不可能と判断したときは早めに減速する等、運転者自身が判断した走行計画に基づいて主体的な運転操作を行うことができる。このことは、不必要に急停止や急加速等を行ってしまう事態を防止あるいは抑制する上でも好ましいものとなる。
【0009】
上記解決手法を前提とした好ましい態様は、次のとおりである。
【0010】
前記リング状回転体が、自車両の走行方向において近い順となる複数の信号機に対応させて複数並べて表示される、ようにしてある(請求項2対応)。この場合、走行方向にある複数の信号機についての通過可能性をそれぞれ直感的に把握して、かなり先までの走行計画を主体的に決定して、それに応じた適切な運転操作を行う上で好ましいものとなる。例えば、次の信号機の通過可能性は高いが、その次の信号機での通過可能性が極めて低いと判断したときは、その次の信号機での停車に備えて、例えば音楽CDの交換を計画したり、ナビゲーション装置での誘導経路の変更を計画したりする等、かなり先のことまでも主体的に計画して、それに応じた運転操作を適切に行う等の上で極めて好ましいものである。
【0011】
前記複数のリング状回転体は、前記複数の信号機間の距離に応じた間隔を有するように直列に表示される、ようにしてある(請求項3対応)。この場合、信号機間隔をも考慮して、かなり先までの走行計画をより適切に決定して、より適切な運転操作を促す上で好ましいものとなる。
【0012】
前記リング状回転体は、現在の車速を維持した状態で走行したときに、信号機を通過できる場合は全体的に青色で表示される一方、通過できない場合は全体的に赤色で表示される、ようにしてある(請求項4対応)。この場合、信号機の通過可能性について、色分け表示によって明確に知ることができる。
【0013】
リング状回転体は、その周方向において切れ目を有し、
前記切れ目の一端と他端との間の周方向長さが、前記青色表示領域の長さとされている、
ようにしてある(請求項5対応)。この場合、リング状回転体に設定される切れ目という空間が、通過できるということに直感的に作用して、通過可能性を示す表示として極めて好ましいものとなる。
【0014】
リング状回転体には、前記青色表示領域の他に、信号機の赤色表示時間割合に応じた周方向長さを有する赤色表示領域と、信号機の黄色表示時間割合に応じた周方向長さを有する黄色表示領域とが設定され、
前記青色表示領域が青色で表示され、前記赤青色表示領域が赤色で表示され、前記黄色表示領域が黄色で表示される、
ようにしてある(請求項6対応)。この場合、信号機の通過可能性を、実際の信号機の青色、赤色、黄色の表示に対応させて知ることができる。
【0015】
前記リング状回転体の直径が、現在の車速を維持した状態で走行したときに、信号機を通過できる可能性が高いときは低いときに比して大きくなるように表示される、ようにしてある(請求項7対応)。この場合、信号機の通過可能性を、リング状回転体の直径の大きさによって視覚的に明確に知ることができる。
【0016】
前記リング状回転体の幅が、信号機設置位置での交差道路の幅が大きいほど大きくなるように表示される、ようにしてある(請求項8対応)。この場合、交差道路の規模をリング状回転体の幅を見ることによって直感的に知ることができる。
【0017】
特定の信号機で停止される可能性の高い場合は、該特定の信号機より先にある信号機に対応したリング状回転体の表示が、非表示とされるかまたは該特定の信号機に対応したリング状回転体の表示よりも目立たなくなるような表示とされる、ようにしてある(請求項9対応)。この場合、運転者の主体的な運転計画に関与する度合が低くなるリング状回転体を非表示あるいは目立たない表示とすることによって、運転者の注意を他のリング状回転体に向けさせる等の上で好ましいものとなる。
【0018】
通過できる可能性の低い信号機に対応したリング状回転体の回転方向が、他のリング状回転体の回転方向とは逆方向とされる、ようにしてある(請求項10対応)。この場合、リング状回転体の回転方向によって、信号機の通過可能性を明確に知ることができる。
【0019】
前記複数のリング状回転体が、略上下方向に伸びる同一直線上にその中心が位置するように直列に表示され、
前記表示手段に、前記同一軸線上において自車両位置が表示される、
ようにしてある(請求項11対応)。この場合、自車両位置と信号機位置との距離関係が明確となって、信号機での通過可能性をより直感的かつ明確に認識させる上で好ましいものとなる。
【0020】
自車両の速度に応じて、自車両の表示位置に対する複数のリング状回転体の接近速度が変化するように表示される、ようにしてある(請求項12対応)。この場合、自車両位置と信号機位置との関係がより明確となって、信号機での通過可能性をさらに直感的かつ明確に認識させる上で好ましいものとなる。
【発明の効果】
【0021】
本発明によれば、信号機の通過可能性を直感的に運転者に把握させることにより、運転者自身が判断した走行計画に基づいて主体的な運転操作を行なうことができる。
【図面の簡単な説明】
【0022】
【図1】本発明が適用された車両と交通情報基地局とを示す図。
【図2】信号機の表示状態の切換えを示すサイクル図。
【図3】リング状回転体の表示例を示す図。
【図4】リング状回転体の別の表示例を示す図。
【図5】複数の信号機に応じた複数のリング状回転体を自車両位置と共に示した表示例を示す図。
【図6】信号機の通過可能性をリング状回転体に施す色によって区別するときの一例を示す図。
【図7】信号機の通過可能性をリング状回転体に設定した切れ目の長さによって区別するときの一例を示す図。
【図8】信号機の通過可能性をリング状回転体の直径の大きさによって区別するときの一例を示す図。
【図9】通過可能性が低い信号機の先にある信号機に対応したリング状回転体の表示例を示す図。
【図10】交差道路の大きさをリング状回転体の幅によって示すようにした例を示す図。
【図11】通過可能性の低い信号機に対応したリング状回転体を逆回転させる例を示す図。
【図12】通過可能性を別表示で示したときの一例を示す図。
【図13】通過可能性を別表示で示したときの別の例を示す図。
【図14】曲がりを含む誘導経路に沿う複数の信号機についてリング状回転体を表示したときの一例を示す図。
【図15】複数の信号機についての通過可能速度範囲を表示した一例を示す図。
【図16】複数のルートと各ルートに設定された信号機の配置例を示す図。
【図17】複数のルートについてそれぞれ複数のリング状回転体を表示した例を示す図。
【図18】ナビゲーション装置を利用してリング状回転体の表示を行う場合の制御系統例を示すブロック図。
【図19】リング状回転体の表示を行う制御例を示すフローチャート。
【発明を実施するための形態】
【0023】
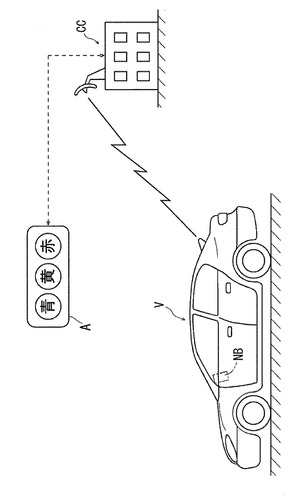
図1において、Vは車両(自車両)、CCは交通基地局、Aは信号機である。信号機Aは実際には多数存在するが、図1では代表的に1つのみ示してある。交通基地局CCは、多数の信号機Aに関する表示状態の情報、特に、信号の表示状態の1サイクル時間、各表示状態の表示時間および表示時刻に関する情報を一元管理している。具体的には、例えば信号機Aが、その表示状態として、青色表示(青色点灯)、赤色表示(赤色点灯)、黄色表示(黄色点灯)の3種類の間で順次変更(切換)えられる場合に、例えば青色表示の開始から再び青色表示になるまでの1サイクルの時間と、各色表示の時間と、その表示時刻(例えば表示開始時刻あるいは表示終了時刻)についての情報を一元管理している。このため、各信号機Aと交通基地局CCとの間では、有線あるいは無線により、上記表示状態に関する情報が授受される。
【0024】
車両Vには、既知のナビゲーション装置NBが装備されている。そして、実施形態では、ナビゲーション送致NBのディスプレイ(表示画面)において、後述するように、リング状回転体を利用した信号機Aの表示状態に関する情報が表示されるようになっている。
【0025】
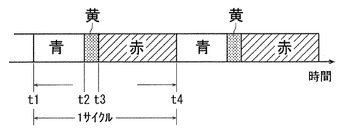
図2は、信号機Aの表示状態が変化する様子の一例を示してある。この図2の例では、時刻t1において、青色表示となり、時刻t2となった時点で、青色表示から黄色表示に切換えられ、時刻t3となった時点で黄色表示から赤色表示に切換えられ、時刻t4となった時点で再び青色表示に切換えられる。そして、時刻t1からt4までの時間が、全ての表示状態が一巡する1サイクルの時間となる。
【0026】
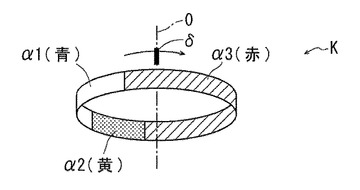
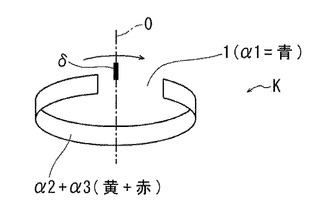
図3は、図2に示すような態様で切換えられる信号機Aについてのリング状回転体Kの表示例が示される。リング状回転体Kは、帯状体を円状に丸めた形状とされて、扁平形状となる斜視図状態で示されている。このリング状回転体Kの周方向全長は、信号機Aの1サイクルの時間(図2におけるt4−t1)に相当している。そして、リング状回転体Kには、その周方向において、信号機Aの各表示状態の時間割合の長さを有する複数(実施形態では3つ)の表示領域α1,α2,α3が設定されている。表示領域α1は、青色表示に対応するもので、その周方向長さは、青色表示時間(図2におけるt2-t1)の割合に対応したものとなっている。つまり、周方向長さ割合が、(t2-t1)/(t4−t1)とされている。同様に、表示領域α2は、黄色表示に対応するもので、その周方向長さは、黄色表示時間(図2におけるt3-t2)の割合に対応したものとなっている。表示領域α3は、赤色表示に対応するもので、その周方向長さは、赤色表示時間(図2におけるt4-t3)の割合に対応したものとなっている。そして、図3の例では、青色表示領域α1については青色で表示され、黄色表示領域α2は黄色で表示され、赤色表示領域α3は赤色で表示される。
【0027】
図3のようなリング状回転体Kは、実施形態では、斜視図でもって扁平状に示されると共に、上下方向に伸びる中心線Oを中心として左右対称形状となるように表示される。そして、リング状回転体Kは、信号機Aの1サイクルの時間でもって1回転するように回転表示される(図3の例では、矢印で示す方向に回転)。そして、中心線Oの位置が現在時刻での信号機Aの表示状態と時刻的に同期するように対応づけられる。図3の場合は、現在時刻においては、赤色表示領域α3が中心線O上に位置しているので、信号機Aは現在赤色であることが示される。また、図3の例では、現在時刻となる中心線Oの位置では、赤色表示領域α3はそろそろ終わりでであり、近々青色表示領域α1が中心線O上に位置する(近々青色表示に切換わる)ということが理解される。ディスプレイに表示された回転するリング状回転体Kを目視することにより、車両Vの運転者は、信号機Aの表示状態の切換わりタイミングを直感的に認識して、その後の走行計画に役立てることになる。なお、現在時刻位置を明示するための指標δを別途表示するようにしてもよく、この指標δを別途表示しないようにしてもよい。また、明確に表示した中心線Oによって現在時刻位置を示すようにしてもよく、この中心線Oを表示しないようにしてもよい。
【0028】
図4は、リング状回転体Kの別の表示例を示すものである。本例では、リング状回転体Kに切れ目1(帯状体が存在しない箇所)を設定して、この切れ目1の周方向長さ(切れ目1の一端と他端との間の周方向長さ)が青色表示領域α1の長さに対応するようにしてある。そして、リング状回転体Kは、全体的に無色あるいは単色(例えば白色にする等、信号機Aで用いる色とは別の色とするのが好ましい)としてある。つまり、図4の例では、信号機Aを通過できる青色表示領域α1を強調して表示できる態様としてある(運転者は、信号機Aを通過できるか否かを知りたいので)。この図4の場合も、リング状回転体Kは、斜視図でもって扁平状に示されると共に、現在軸位置となる中心線Oを中心として左右対称形状となるように表示される。そして、リング状回転体Kの手前中央に、現在時刻位置を示す指標δが表示されて、この指標δの位置が現在時刻における信号機Aの表示状態となるように対応づけられる。図4の場合、現在時刻においては、信号機Aが青色表示であって、しかもまもなく青色表示の終了付近である、ということが理解される。
【0029】
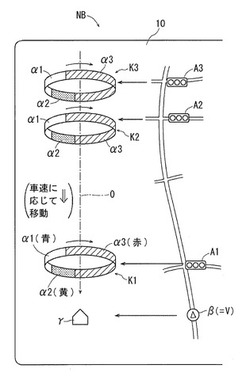
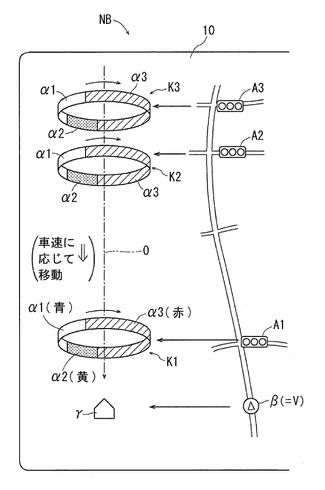
図5は、ナビゲーション装置NBのディスプレイ10に対して、複数の信号機A1、A2,A3について、それぞれ対応するリング状回転体K1〜K3を表示する場合の例を示す。すなわち、ディスプレイ10に表示された地図上に、車両Vの位置表示が符合βで表示される。そして、現在走行している走行路上のうち、走行方向(の前方)にある信号機のうち、近い順に所定数(実施形態では3つ)の信号機が、A1、A2、A3が存在するものとなっている。もっとも近い信号機A1についてのリング状回転体がK1で示され、1番目に近い信号機A2についてのリング状回転体がK2で示され、3番目に近い信号機A3についてのリング状回転体が符合K3で示される。各リング状回転体K1〜K3の表示状態は、図3に対応したものとなっている(青、黄、赤の3色でその表示領域を色分け)。
【0030】
各リング状回転体K1〜K3は、中心線Oを中心として左右対称形状となるように扁平状(斜視図)で示される。勿論、中心線Oの位置が現在時刻に対応している。そして、各リング状回転体K1〜K3は、それぞれ中心線Oを中心として矢印方向に回転されている。勿論、リング状回転体K1が1回転する時間は、対応する信号機A1の1サイクルの時間である。同様に、リング状回転体K2が1回転する時間は、対応する信号機A2の1サイクルの時間であり、リング状回転体K3が1回転する時間は、対応する信号機A3の1サイクルの時間である。信号機A1〜A3の間での1サイクルの時間の相違に応じて、リング状回転体K1〜K3が1回転する時間が相違することになる。
【0031】
各リング状回転体K1〜K3の位置は、信号機A1〜A3の位置に対応した位置とされる。すなわち、信号機A1とA2との間の実際の距離に応じて、リング状回転体K1とK2との間隔が設定される。同様に、信号機A2とA3との間の実際の距離に応じて、リング状回転体K2とK3との間の間隔が設定される。そして、中心線Oのもっとも手前側には、車両Vの位置を示す車両位置表示γが表示されるが、この車両位置表示γとリング状回転体K1との間の間隔が、車両Vと信号機A1との間の実際の距離に応じたものとされる。そして、例えば、車両位置表示γの位置が不変とされて、車両Vが信号機A1に向けて走行するのに応じた速度でもって、リング状回転体K1〜K3が車両表示位置γに向けて接近するように表示される。
【0032】
実施形態では、常時所定数(実施形態では3つ)のリング状回転体が表示されるように設定してある。すなわち、車両Vが、信号機A1を通過すると、信号機A1に対応したリング状回転体K1の表示が消去される。つまり、信号機A2に対応したリング状回転体K2が車両位置表示γにもっとも近い位置に表示される。そして、信号機A3の次にくる信号機(図示を略す)が、新たに表示されることになる。
【0033】
車両Vの運転者は、リング状回転体K1を目視することにより、もっとも近い信号機A1についての通過可能性を直感的に判断できることになる。これに加えて、信号機A2、A3についての通過可能性をもリング状回転体K2、K3を目視することにより直感的に判断できることになる。これにより、運転者は、複数の信号機についての通過可能性を考慮した走行計画を主体的に立てて、その後の運転操作を行うことになる。
【0034】
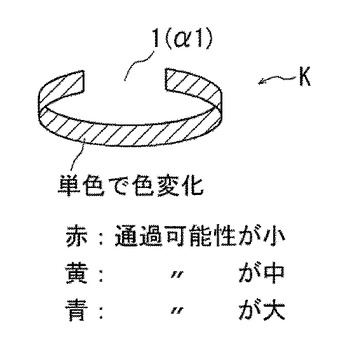
次に、図6〜図16を参照しつつ、リング状回転体の種々の表示の仕方について説明する。まず、図6は、リング状回転体Kを、図4に示す場合と同様に、切れ目1でもって青色表示領域α1を示すものとなっている。そして、リング状回転体Kを全体的に単色で表示するが、その色表示を、信号機の通過可能性の大きさによって変更するようにしてある。すなわち、現在の車速を維持した状態であることを前提として、信号機を通過できる可能性が高い場合はリング状回転体Kが全体的に青色表示される。また、信号機を通過できる可能性が中程度の場合は、リング状回転体Kが全体的に黄色表示される。さらに、信号機を通過できる可能性が低い場合は、リング状回転体Kが全体的に赤色表示される。このように、リング状回転体Kの色を全体的に変更することによって、信号機の通過可能性をより直感的に判断できるようになる。
【0035】
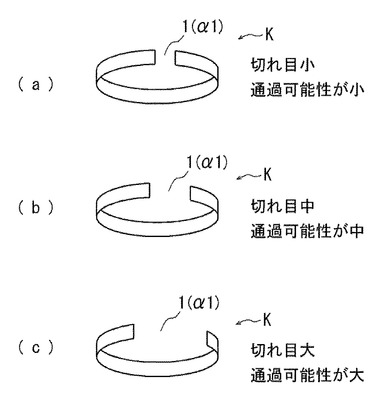
図7は、切れ目1でもって青色表示領域α1を示す場合に、信号機の通過可能性の大きさに応じて、切れ目1の長さを補正するようにしてある。まず、通過可能性が中程度の場合は、図7の(b)で示すように、切れ目1の長さは補正されない(基本の長さ)。通過可能性の低い場合は、図7の(a)で示すように、基本長さに対して、切れ目1の長さが短くなるように補正される。通過可能性の高い場合は、図7の(c)で示すように、基本長さに対して、切れ目1の長さが長くなるように補正される。このような設定により運転者は、切れ目1の長さの大小を見ることにより、信号機の通過可能性について、より直感的に判断できる。
【0036】
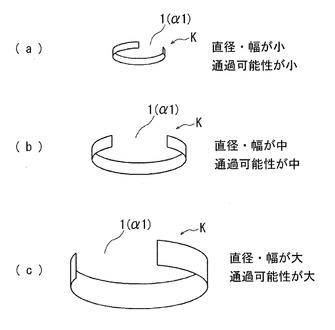
図8は、切れ目1でもって青色表示領域α1を示す場合に、信号機の通過可能性の大きさに応じて、リング状回転体Kの大きさを補正するようにしてある。通過可能性が中程度の場合は、図8の(b)で示すように、リング状回転体Kの直径および幅(帯状体の幅)が基本の大きさとされる。通過可能性の低い場合は、図8の(a)で示すように、基本の大きさに対して、直径および幅共に小さくなるように補正される。通過可能性の高い場合は、図8の(c)で示すように、基本の大きさに対して、直径および幅が共に大きくされる。なお、直径のみあるいは幅のみを通過可能性に応じて変更するようにしてもよい。
【0037】
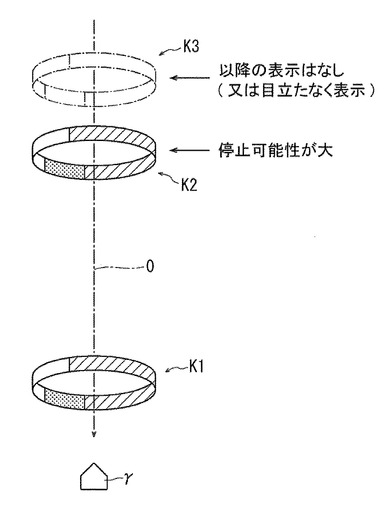
図9は、図5で示すような複数のリング状回転体K1〜K3を表示する場合に、通過可能性の低い信号機よりも遠方の信号機に対応したリング状回転体Kの表示を消去あるいは目立たなくさせるようにしたものである。すなわち、図9の例では、信号機A2の通過可能性が低いために、その後に通過する信号機A3に対応したリング状回転体K3の表示を、消去するか(表示なし)、他のリング状回転体K1、K2よりも目立たないような表示にしてある(目立たない表示としては、例えば、薄く表示したり、輪郭を破線で表示する等)。
【0038】
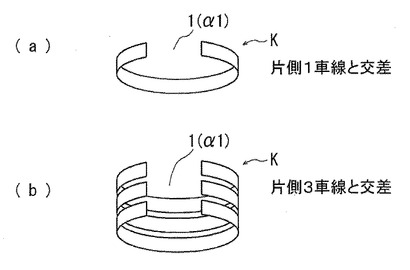
図10は、信号機のある交差点で交差する交差路の大きさ(幅)を、リング状回転体Kを利用して表示するようにした例を示す。すなわち、交差路の大きさが片側1車線のときは、図10の(a)で示すように、リング状回転体Kの幅が、基本の幅とされる。交差路の大きさが片側3車線の場合は、図10の(b)で示すように、リング状回転体Kの幅が、基本幅の3倍とされる。この場合、車線数が明確となるように、基本幅のリング状回転体を微少間隔をあけて3個並べるようにしてある。図示を略すが、片側2車線の場合は、基本幅のリング状回転体Kを微少間隔をあけて2個並べて表示すればよい。なお、微少間隔をあけることなく、車線数が多いほどリング状回転体の幅を大きくするようにしてもよい。
【0039】
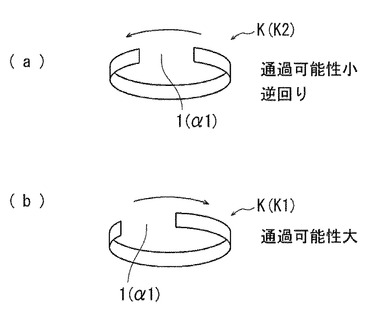
図11は、信号機の通過可能性を、リング状回転体の回転方向によって示すようにした場合を示す。すなわち、通過可能性が高い場合あるいは中程度の場合(つまり通過可能性が低くない場合)は、図11の(b)に示すように、基本方向にリング状回転体Kが回転される。これに対して、通過可能性の低い信号機に対応したリング状回転体Kについては、上記基本方向とは逆方向に回転させるようにしてある。運転者は、リング状回転体Kの回転方向をみることによって、信号機の通過可能性を直感的に即座に判断することができる。
【0040】
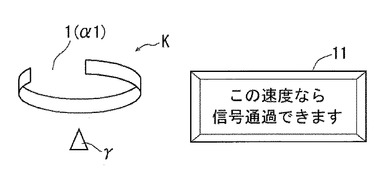
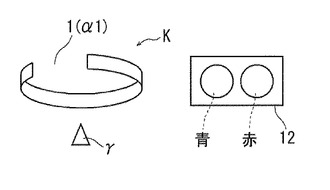
図12、図13は、リング状回転体Kの脇に、信号機の通過可能性に関する補助情報を合わせて表示するようにした例を示す。すなわち、図12の場合は、リング状回転体Kの脇に、現在の速度を維持した状態であれば信号機を通過できる旨の補助表示11が表示される。補助表示11は、例えば、「この速度なら信号通過できます」という文字表示とされている。図13の例は、リング状回転体Kの脇に、赤色と青色とを選択的に表示可能な補助表示灯(パイロットランプ)12を表示するようにしてある。すなわち、信号機の通過可能性が高い場合は、補助表示灯12が青色点灯され、通過可能性が低い場合は補助表示灯12が赤色点灯される。なお、通過可能性が中程度の場合は、青色、赤色共に消灯される。
【0041】
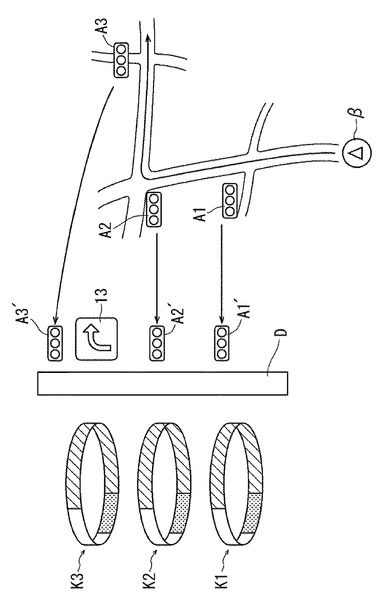
図14は、信号機A1〜A3のうち、信号機A3が、右折した後に現れる場合が示される。すなわち、図14では、車両V(のディスプレイ上での位置が符合βで示される)が目的地に向けて経路誘導されているとき、経路誘導にしたがうと、信号機A2の位置(交差点)で右折して、その後に信号機A3が設置された状態となっている。この場合、信号機A3に対応したリング状回転体K3の脇に、方向変更マーク13(図14の場合は右折マーク)が表示される。これにより、運転者は、信号機A3については、右折後のものであることが直感的に理解できる。なお、図14では、右折の場合を示したが、現在走行している走行路から外れる走行となるときは、方向変更マーク13は、外れた方向を表示されることになり、例えば、左折、斜め右方向、斜め左方向等。なお、図14では、リング状回転体K1〜K3に対応させて、その脇に車両Vの走行路に対応した走行路表示Dが象徴的に表示されると共に、走行路表示Dの脇に、信号機A1〜A3に対応した信号機表示A1′〜A3′表示を行うようにしてある。
【0042】
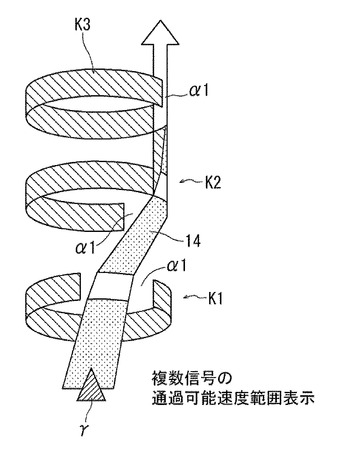
図15は、複数の信号機を通過可能となる車両Vの速度範囲を表示する場合を示す。すなわち、リング状回転体Kは、切れ目1が青色表示領域α1を示すものとされ、ある幅を有する速度表示体14(実施形態では帯状矢印)が、複数の切れ目1を通過する様子が示される。この場合、速度表示体14の幅の右端が上限速度を示し、幅の左端が下限速度を示す。つまり、速度表示体14の幅が大きいほど、複数の信号機を通過できる速度の許容範囲が広いということを示す。なお、速度表示体14の幅の右端と左端に、速度を数値表示してもよく、また図15左右方向(X軸方向)に速度目盛りを付しておくようにしてもよい。
【0043】
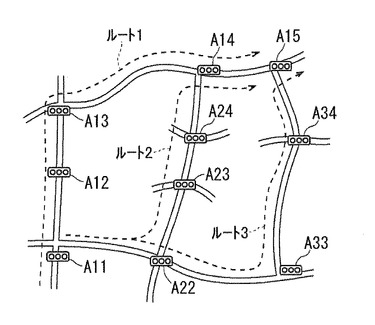
図16は、複数のルートの信号機について、それぞれ複数のリング状回転体Kによって信号機の通過可能性を表示するようにした例を示す。すなわち、図16においては、現在の経路誘導路がルート1とされて、信号機A11,A12、A13,A14,A15を経るルートとなっている。また、ルート2は、迂回路となるもので、信号機A11から、A22,A23,A24、A14、A15を経るルートとされる。さらに、ルート3は、迂回路となるもので、信号機A11、A22、A33、A34、A15を経るルートとなっている。
【0044】
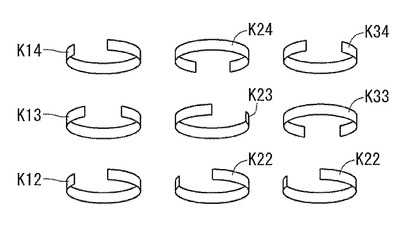
図17において、車両Vは、信号機A11にしたがってその手前で停車しており、この状態で、各ルートについての信号機の通過可能性がリング状回転体によって表示される。すなわち、図17では、信号機A11に対応したリング状回転体は表示されないで、その後の信号機に対応したリング状回転体が表示される。具体的には、ルート1についての信号機A12,A13、A14に対応したリング状回転体が、K12,K13、K14として示される。また、ルート2についての信号機A22,A23,A24に対応したリング状回転体が、K22、K23、K24として示される。さらに、ルート3についての信号機A22,A33、A34に対応したリング状回転体が、K22、K33、K34として示される。
【0045】
運転者は、各ルート1〜ルート3についての信号機の通過可能性について、各ルートに対応したリング状回転体をみることによって判断して、現在のルート1のまま走行するのか、それともルート2あるいはルート3に経路変更するかを判断できることになる。なお、図17では、各ルートについて3個のリング状回転体を示したが、4個〜5個というようにより数多く表示することにより、ルート選択をより精度よく判断できることになる。特に、各ルートでのリング状回転体の最大表示数を例えば6に設定して、この最大表示数の範囲内であれば、最終的に各ルートの集合地点となる信号機A15までの表示を行うのが好ましいものとなる。なお、経路誘導していない場合は、現在の走行路と並行する道路についての複数の信号機に対応した複数のリング状回転体を図17のように並列表示して、運転者による走行路選択の補助とすることもできる。
【0046】
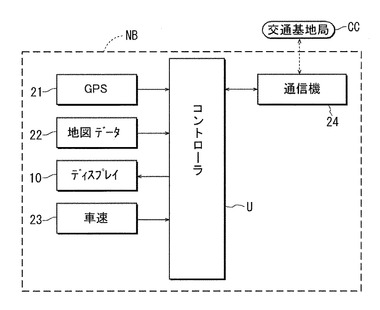
図18は、ナビゲーション装置NBの制御系統をブロック図的に示すものである。この図18において、Uはマイクロコンピュータを利用して構成されたコントローラ(制御ユニット)である。この図18において、コントローラUには、地図やリング状回転体を表示するディスプレイ10の他、GPS21、地図データ22が接続され、さらに、車速センサ23から車速信号が入力される。また、通信機24を介して(例えば路車間通信やインターネット通信、電話回線通信)、交通基地局CCから多数の信号機に関する情報が入力される。
【0047】
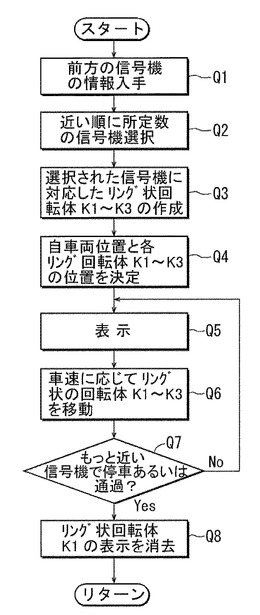
図19は、図18に示すコントローラUの制御例を示すものである。なお、図19に示す制御例は、図5で示すように、ディスプレイ10の一部に、通常のナビゲーション用の地図表示と合わせて所定数(実施形態では3個)のリング状回転体を表示するようにしてある。
【0048】
以下、図19の制御例について説明するが、以下の説明でQはステップを示す。まず、Q1において、車両Vは、交通基地局CCと交信して、車両Vの現在の走行路の延長方向にある複数の信号機に関する情報が入手される。経路誘導中のときは、誘導経路にある信号機に関する情報が入手される。Q1で入手する情報としては、各信号機のそれぞれについて、表示状態が一巡する1サイクルの時間と、各表示状態の表示時間と、少なくともある1つの表示状態についての表示開始時刻とされる。この後、Q2において、入手された複数の信号機(に関する情報)のうち、車両Vの近い順に所定数(実施形態では3つ)の信号機(に関する情報が)選択される。
【0049】
この後、Q3において、選択された3つの信号機についてそれぞれ、Q1で入手された情報に基づいて、図4に示すようなリング状回転体K1〜K3が、各信号機に対応して作成される。この後、Q4において、現在時刻を意味する中心線O上において、車両Vの現在位置を表示する車両位置表示γに対する各リング状回転体K1〜K3の間隔が決定される(車両Vの現在位置に対する各信号機の実際の距離に応じて間隔決定)。
【0050】
Q4の後、Q5において、ディスプレイ10に対して、車両位置表示γと各リング状回転体K1〜K3とが図5に示すように表示される。勿論、各リング状回転体K1〜K3は、対応する信号機の表示切換えの1サイクルで1回転するように同方向に回転され、また、中心線Oの位置が、各信号機での現在の表示状態に対応するように表示される(中心線Oを表示することに加えてあるいは代えて、現在時刻を示す指標δを表示してもよい)。この後、Q6において、車両Vの現在の車速に応じて、各リング状回転体K1〜K3が車両位置表示γに接近するように移動される。
【0051】
Q6の後、Q7において、車両Vがもっとも近い位置にある信号機A1の位置で停車したかあるいはこの信号機を通過したか否かが判別される。このQ7の判別でNOのときは、Q5に戻る。Q7の判別でYESのときは、Q8において、通過した信号機に対応したリング状回転体K1の表示が消去された後、Q1に戻る。これにより、次の表示状態では、リング状回転体K2がK1となり、K3がK2となり、新たにリング状回転体K3が出現することになる(リング状回転体の更新)。
【0052】
以上実施形態について説明したが、本発明は、実施形態に限定されるものではなく、特許請求の範囲の記載された範囲において適宜の変更が可能であり、例えば次のような場合をも含むものである。リング状回転体Kは、扁平状の斜視図形式で表示することなく、真円状に表示するようにしてもよい。リング状回転体Kを、ナビゲーション装置NB用のディスプレイ以外に表示するようにしてもよい。例えば、リング状回転体をフロントウインドガラスの前方に表示する(ヘッドアップディスプレイ)等、リング状回転体の表示位置は適宜選択できる。車両Vにもっとも近い位置にある信号機についてのみリング状回転体Kを表示するようにしてもよい(リング状回転体Kを1つのみ表示する)。複数のリング状回転体を表示する場合に、縦方向(上下方向)に直列に表示する場合に限らず、横方向(水平方向)に直列に表示するようにしてもよい。リング状回転体Kの各種表示の仕方は、互いに排他的でない限り、任意の組み合わせでもって表示することが可能である(例えば、図8の表示状態と図10の表示状態との組み合わせで表示する等)。勿論、本発明の目的は、明記されたものに限らず、実質的に好ましいあるいは利点として表現されたものを提供することをも暗黙的に含むものである。また、本発明は、信号機通過情報の表示方法として把握することも可能である。
【産業上の利用可能性】
【0053】
本発明は、信号機の通過可能性を運転者に直観的に把握させて、運転者による主体的な走行計画を立てさせる上で役立つものである。
【符号の説明】
【0054】
V:車両
CC:交通基地局
NB:ナビゲーション装置
A、A1、A2、A3:信号機
K、K1、K2、K3:リング状回転体
α1:青色表示領域
α2:黄色表示領域
α3:赤色表示領域
β:自車両位置表示(地図対応)
γ:車両位置表示(リング状回転体に対応)
δ:指標(現在時刻対応)
O:中心線(現在時刻対応)
1:切れ目(青色表示領域対応)
10:ディスプレイ
【技術分野】
【0001】
本発明は、信号情報提供装置に関するものである。
【背景技術】
【0002】
道路の交差点には信号機が設置されて、この信号機の表示(例えば青色、赤色、黄色のいずれかの表示)にしたがって、車両は信号機のある交差点を通過したりその手前で停止する等を行うことになる。
【0003】
また、最近では、車両(の運転者)に対して、各種の運転支援のための情報を提供することも行われるようになっている。特許文献1には、信号機における現在の表示状態の残り時間(現在の表示状態から次の表示状態に切換わるまでの時間)を車両に提供するものが開示されている。特許文献2には、カーブ等を安全に走行できるようにするための推奨速度を提供することが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−170864号公報
【特許文献2】特開2005−234758号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、運転者にとって、走行計画、特に近い将来の走行計画の一環として、自車両の走行方向にある交差点を、例えば現在の車速を維持した状態で通過できるか否かを知ることが重要となる。しかしながら、特許文献1のものでは、信号機の表示状態が切換わるまでの残り時間が提供されるだけなので、走行計画に有効に活用することが難しいものとなる。また、特許文献2に記載の技術を応用して、次の信号機(のある交差点)を通過できるような推奨速度を運転者に提供することも考えられるが、この場合は、推奨速度を強要されるような感覚を運転者へ与えてしまい、運転者が主体的な運転操作を行なうという点では好ましくないものとなる。
【0006】
本発明は以上のような事情を勘案してなされたもので、その目的は、信号機の通過可能性に関連して運転者が判断した走行計画に基づいて、運転者が主体的に運転操作を行えるようにした信号情報提供装置を提供することにある。
【課題を解決するための手段】
【0007】
前記目的を達成するため、本発明にあっては、基本的に、リング状の回転体を表示することによって運転者に対して信号機の表示状態に関する情報を提供するようにしてある。そして、リング状回転体が1回転する時間を、信号機の全ての表示状態が切換えられる1サイクルの時間となるように対応づけてある。さらに、リング状回転体に、信号機の青色表示時間割合に応じた長さを識別させる表示を行うようにしてある。以上に加えて、リング状回転体の手前中央部分が信号機の現在の表示状態に対応したものとなるようにしてある(時刻の同期性)。
【0008】
具体的には、本発明にあっては次のような解決手法を採択してある。すなわち、特許請求の範囲における請求項1に記載のように、
自車両の走行方向にある信号機の通過可能性に関する情報を自車両の運転者に提供する信号情報提供装置であって、
リング状回転体を表示する表示手段を備え、
前記リング状回転体は、信号機が青色から再び青色になるまでの1サイクルの時間でもって1回転するように表示され、
前記リング状回転体には、前記1サイクルの時間に対する信号機の青色表示時間割合に応じた周方向長さを有する青色対応領域が設定され、
前記リング状回転体は、その手前中央部分に現在の信号機の表示状態が位置するように表示される、
ようにしてある。上記解決手法によれば、運転者は、リング状回転体における青色表示領域とリング状回転体の手前中央部との位置関係を把握しつつ、リング状回転体の回転速度をも勘案して、信号機の通過可能性を直感的に把握できるようになる。これにより、運転者は、信号機の通過可能性が高いと判断したときは現在の車速を維持したまま走行したり、やや速度を上げても通過不可能と判断したときは早めに減速する等、運転者自身が判断した走行計画に基づいて主体的な運転操作を行うことができる。このことは、不必要に急停止や急加速等を行ってしまう事態を防止あるいは抑制する上でも好ましいものとなる。
【0009】
上記解決手法を前提とした好ましい態様は、次のとおりである。
【0010】
前記リング状回転体が、自車両の走行方向において近い順となる複数の信号機に対応させて複数並べて表示される、ようにしてある(請求項2対応)。この場合、走行方向にある複数の信号機についての通過可能性をそれぞれ直感的に把握して、かなり先までの走行計画を主体的に決定して、それに応じた適切な運転操作を行う上で好ましいものとなる。例えば、次の信号機の通過可能性は高いが、その次の信号機での通過可能性が極めて低いと判断したときは、その次の信号機での停車に備えて、例えば音楽CDの交換を計画したり、ナビゲーション装置での誘導経路の変更を計画したりする等、かなり先のことまでも主体的に計画して、それに応じた運転操作を適切に行う等の上で極めて好ましいものである。
【0011】
前記複数のリング状回転体は、前記複数の信号機間の距離に応じた間隔を有するように直列に表示される、ようにしてある(請求項3対応)。この場合、信号機間隔をも考慮して、かなり先までの走行計画をより適切に決定して、より適切な運転操作を促す上で好ましいものとなる。
【0012】
前記リング状回転体は、現在の車速を維持した状態で走行したときに、信号機を通過できる場合は全体的に青色で表示される一方、通過できない場合は全体的に赤色で表示される、ようにしてある(請求項4対応)。この場合、信号機の通過可能性について、色分け表示によって明確に知ることができる。
【0013】
リング状回転体は、その周方向において切れ目を有し、
前記切れ目の一端と他端との間の周方向長さが、前記青色表示領域の長さとされている、
ようにしてある(請求項5対応)。この場合、リング状回転体に設定される切れ目という空間が、通過できるということに直感的に作用して、通過可能性を示す表示として極めて好ましいものとなる。
【0014】
リング状回転体には、前記青色表示領域の他に、信号機の赤色表示時間割合に応じた周方向長さを有する赤色表示領域と、信号機の黄色表示時間割合に応じた周方向長さを有する黄色表示領域とが設定され、
前記青色表示領域が青色で表示され、前記赤青色表示領域が赤色で表示され、前記黄色表示領域が黄色で表示される、
ようにしてある(請求項6対応)。この場合、信号機の通過可能性を、実際の信号機の青色、赤色、黄色の表示に対応させて知ることができる。
【0015】
前記リング状回転体の直径が、現在の車速を維持した状態で走行したときに、信号機を通過できる可能性が高いときは低いときに比して大きくなるように表示される、ようにしてある(請求項7対応)。この場合、信号機の通過可能性を、リング状回転体の直径の大きさによって視覚的に明確に知ることができる。
【0016】
前記リング状回転体の幅が、信号機設置位置での交差道路の幅が大きいほど大きくなるように表示される、ようにしてある(請求項8対応)。この場合、交差道路の規模をリング状回転体の幅を見ることによって直感的に知ることができる。
【0017】
特定の信号機で停止される可能性の高い場合は、該特定の信号機より先にある信号機に対応したリング状回転体の表示が、非表示とされるかまたは該特定の信号機に対応したリング状回転体の表示よりも目立たなくなるような表示とされる、ようにしてある(請求項9対応)。この場合、運転者の主体的な運転計画に関与する度合が低くなるリング状回転体を非表示あるいは目立たない表示とすることによって、運転者の注意を他のリング状回転体に向けさせる等の上で好ましいものとなる。
【0018】
通過できる可能性の低い信号機に対応したリング状回転体の回転方向が、他のリング状回転体の回転方向とは逆方向とされる、ようにしてある(請求項10対応)。この場合、リング状回転体の回転方向によって、信号機の通過可能性を明確に知ることができる。
【0019】
前記複数のリング状回転体が、略上下方向に伸びる同一直線上にその中心が位置するように直列に表示され、
前記表示手段に、前記同一軸線上において自車両位置が表示される、
ようにしてある(請求項11対応)。この場合、自車両位置と信号機位置との距離関係が明確となって、信号機での通過可能性をより直感的かつ明確に認識させる上で好ましいものとなる。
【0020】
自車両の速度に応じて、自車両の表示位置に対する複数のリング状回転体の接近速度が変化するように表示される、ようにしてある(請求項12対応)。この場合、自車両位置と信号機位置との関係がより明確となって、信号機での通過可能性をさらに直感的かつ明確に認識させる上で好ましいものとなる。
【発明の効果】
【0021】
本発明によれば、信号機の通過可能性を直感的に運転者に把握させることにより、運転者自身が判断した走行計画に基づいて主体的な運転操作を行なうことができる。
【図面の簡単な説明】
【0022】
【図1】本発明が適用された車両と交通情報基地局とを示す図。
【図2】信号機の表示状態の切換えを示すサイクル図。
【図3】リング状回転体の表示例を示す図。
【図4】リング状回転体の別の表示例を示す図。
【図5】複数の信号機に応じた複数のリング状回転体を自車両位置と共に示した表示例を示す図。
【図6】信号機の通過可能性をリング状回転体に施す色によって区別するときの一例を示す図。
【図7】信号機の通過可能性をリング状回転体に設定した切れ目の長さによって区別するときの一例を示す図。
【図8】信号機の通過可能性をリング状回転体の直径の大きさによって区別するときの一例を示す図。
【図9】通過可能性が低い信号機の先にある信号機に対応したリング状回転体の表示例を示す図。
【図10】交差道路の大きさをリング状回転体の幅によって示すようにした例を示す図。
【図11】通過可能性の低い信号機に対応したリング状回転体を逆回転させる例を示す図。
【図12】通過可能性を別表示で示したときの一例を示す図。
【図13】通過可能性を別表示で示したときの別の例を示す図。
【図14】曲がりを含む誘導経路に沿う複数の信号機についてリング状回転体を表示したときの一例を示す図。
【図15】複数の信号機についての通過可能速度範囲を表示した一例を示す図。
【図16】複数のルートと各ルートに設定された信号機の配置例を示す図。
【図17】複数のルートについてそれぞれ複数のリング状回転体を表示した例を示す図。
【図18】ナビゲーション装置を利用してリング状回転体の表示を行う場合の制御系統例を示すブロック図。
【図19】リング状回転体の表示を行う制御例を示すフローチャート。
【発明を実施するための形態】
【0023】
図1において、Vは車両(自車両)、CCは交通基地局、Aは信号機である。信号機Aは実際には多数存在するが、図1では代表的に1つのみ示してある。交通基地局CCは、多数の信号機Aに関する表示状態の情報、特に、信号の表示状態の1サイクル時間、各表示状態の表示時間および表示時刻に関する情報を一元管理している。具体的には、例えば信号機Aが、その表示状態として、青色表示(青色点灯)、赤色表示(赤色点灯)、黄色表示(黄色点灯)の3種類の間で順次変更(切換)えられる場合に、例えば青色表示の開始から再び青色表示になるまでの1サイクルの時間と、各色表示の時間と、その表示時刻(例えば表示開始時刻あるいは表示終了時刻)についての情報を一元管理している。このため、各信号機Aと交通基地局CCとの間では、有線あるいは無線により、上記表示状態に関する情報が授受される。
【0024】
車両Vには、既知のナビゲーション装置NBが装備されている。そして、実施形態では、ナビゲーション送致NBのディスプレイ(表示画面)において、後述するように、リング状回転体を利用した信号機Aの表示状態に関する情報が表示されるようになっている。
【0025】
図2は、信号機Aの表示状態が変化する様子の一例を示してある。この図2の例では、時刻t1において、青色表示となり、時刻t2となった時点で、青色表示から黄色表示に切換えられ、時刻t3となった時点で黄色表示から赤色表示に切換えられ、時刻t4となった時点で再び青色表示に切換えられる。そして、時刻t1からt4までの時間が、全ての表示状態が一巡する1サイクルの時間となる。
【0026】
図3は、図2に示すような態様で切換えられる信号機Aについてのリング状回転体Kの表示例が示される。リング状回転体Kは、帯状体を円状に丸めた形状とされて、扁平形状となる斜視図状態で示されている。このリング状回転体Kの周方向全長は、信号機Aの1サイクルの時間(図2におけるt4−t1)に相当している。そして、リング状回転体Kには、その周方向において、信号機Aの各表示状態の時間割合の長さを有する複数(実施形態では3つ)の表示領域α1,α2,α3が設定されている。表示領域α1は、青色表示に対応するもので、その周方向長さは、青色表示時間(図2におけるt2-t1)の割合に対応したものとなっている。つまり、周方向長さ割合が、(t2-t1)/(t4−t1)とされている。同様に、表示領域α2は、黄色表示に対応するもので、その周方向長さは、黄色表示時間(図2におけるt3-t2)の割合に対応したものとなっている。表示領域α3は、赤色表示に対応するもので、その周方向長さは、赤色表示時間(図2におけるt4-t3)の割合に対応したものとなっている。そして、図3の例では、青色表示領域α1については青色で表示され、黄色表示領域α2は黄色で表示され、赤色表示領域α3は赤色で表示される。
【0027】
図3のようなリング状回転体Kは、実施形態では、斜視図でもって扁平状に示されると共に、上下方向に伸びる中心線Oを中心として左右対称形状となるように表示される。そして、リング状回転体Kは、信号機Aの1サイクルの時間でもって1回転するように回転表示される(図3の例では、矢印で示す方向に回転)。そして、中心線Oの位置が現在時刻での信号機Aの表示状態と時刻的に同期するように対応づけられる。図3の場合は、現在時刻においては、赤色表示領域α3が中心線O上に位置しているので、信号機Aは現在赤色であることが示される。また、図3の例では、現在時刻となる中心線Oの位置では、赤色表示領域α3はそろそろ終わりでであり、近々青色表示領域α1が中心線O上に位置する(近々青色表示に切換わる)ということが理解される。ディスプレイに表示された回転するリング状回転体Kを目視することにより、車両Vの運転者は、信号機Aの表示状態の切換わりタイミングを直感的に認識して、その後の走行計画に役立てることになる。なお、現在時刻位置を明示するための指標δを別途表示するようにしてもよく、この指標δを別途表示しないようにしてもよい。また、明確に表示した中心線Oによって現在時刻位置を示すようにしてもよく、この中心線Oを表示しないようにしてもよい。
【0028】
図4は、リング状回転体Kの別の表示例を示すものである。本例では、リング状回転体Kに切れ目1(帯状体が存在しない箇所)を設定して、この切れ目1の周方向長さ(切れ目1の一端と他端との間の周方向長さ)が青色表示領域α1の長さに対応するようにしてある。そして、リング状回転体Kは、全体的に無色あるいは単色(例えば白色にする等、信号機Aで用いる色とは別の色とするのが好ましい)としてある。つまり、図4の例では、信号機Aを通過できる青色表示領域α1を強調して表示できる態様としてある(運転者は、信号機Aを通過できるか否かを知りたいので)。この図4の場合も、リング状回転体Kは、斜視図でもって扁平状に示されると共に、現在軸位置となる中心線Oを中心として左右対称形状となるように表示される。そして、リング状回転体Kの手前中央に、現在時刻位置を示す指標δが表示されて、この指標δの位置が現在時刻における信号機Aの表示状態となるように対応づけられる。図4の場合、現在時刻においては、信号機Aが青色表示であって、しかもまもなく青色表示の終了付近である、ということが理解される。
【0029】
図5は、ナビゲーション装置NBのディスプレイ10に対して、複数の信号機A1、A2,A3について、それぞれ対応するリング状回転体K1〜K3を表示する場合の例を示す。すなわち、ディスプレイ10に表示された地図上に、車両Vの位置表示が符合βで表示される。そして、現在走行している走行路上のうち、走行方向(の前方)にある信号機のうち、近い順に所定数(実施形態では3つ)の信号機が、A1、A2、A3が存在するものとなっている。もっとも近い信号機A1についてのリング状回転体がK1で示され、1番目に近い信号機A2についてのリング状回転体がK2で示され、3番目に近い信号機A3についてのリング状回転体が符合K3で示される。各リング状回転体K1〜K3の表示状態は、図3に対応したものとなっている(青、黄、赤の3色でその表示領域を色分け)。
【0030】
各リング状回転体K1〜K3は、中心線Oを中心として左右対称形状となるように扁平状(斜視図)で示される。勿論、中心線Oの位置が現在時刻に対応している。そして、各リング状回転体K1〜K3は、それぞれ中心線Oを中心として矢印方向に回転されている。勿論、リング状回転体K1が1回転する時間は、対応する信号機A1の1サイクルの時間である。同様に、リング状回転体K2が1回転する時間は、対応する信号機A2の1サイクルの時間であり、リング状回転体K3が1回転する時間は、対応する信号機A3の1サイクルの時間である。信号機A1〜A3の間での1サイクルの時間の相違に応じて、リング状回転体K1〜K3が1回転する時間が相違することになる。
【0031】
各リング状回転体K1〜K3の位置は、信号機A1〜A3の位置に対応した位置とされる。すなわち、信号機A1とA2との間の実際の距離に応じて、リング状回転体K1とK2との間隔が設定される。同様に、信号機A2とA3との間の実際の距離に応じて、リング状回転体K2とK3との間の間隔が設定される。そして、中心線Oのもっとも手前側には、車両Vの位置を示す車両位置表示γが表示されるが、この車両位置表示γとリング状回転体K1との間の間隔が、車両Vと信号機A1との間の実際の距離に応じたものとされる。そして、例えば、車両位置表示γの位置が不変とされて、車両Vが信号機A1に向けて走行するのに応じた速度でもって、リング状回転体K1〜K3が車両表示位置γに向けて接近するように表示される。
【0032】
実施形態では、常時所定数(実施形態では3つ)のリング状回転体が表示されるように設定してある。すなわち、車両Vが、信号機A1を通過すると、信号機A1に対応したリング状回転体K1の表示が消去される。つまり、信号機A2に対応したリング状回転体K2が車両位置表示γにもっとも近い位置に表示される。そして、信号機A3の次にくる信号機(図示を略す)が、新たに表示されることになる。
【0033】
車両Vの運転者は、リング状回転体K1を目視することにより、もっとも近い信号機A1についての通過可能性を直感的に判断できることになる。これに加えて、信号機A2、A3についての通過可能性をもリング状回転体K2、K3を目視することにより直感的に判断できることになる。これにより、運転者は、複数の信号機についての通過可能性を考慮した走行計画を主体的に立てて、その後の運転操作を行うことになる。
【0034】
次に、図6〜図16を参照しつつ、リング状回転体の種々の表示の仕方について説明する。まず、図6は、リング状回転体Kを、図4に示す場合と同様に、切れ目1でもって青色表示領域α1を示すものとなっている。そして、リング状回転体Kを全体的に単色で表示するが、その色表示を、信号機の通過可能性の大きさによって変更するようにしてある。すなわち、現在の車速を維持した状態であることを前提として、信号機を通過できる可能性が高い場合はリング状回転体Kが全体的に青色表示される。また、信号機を通過できる可能性が中程度の場合は、リング状回転体Kが全体的に黄色表示される。さらに、信号機を通過できる可能性が低い場合は、リング状回転体Kが全体的に赤色表示される。このように、リング状回転体Kの色を全体的に変更することによって、信号機の通過可能性をより直感的に判断できるようになる。
【0035】
図7は、切れ目1でもって青色表示領域α1を示す場合に、信号機の通過可能性の大きさに応じて、切れ目1の長さを補正するようにしてある。まず、通過可能性が中程度の場合は、図7の(b)で示すように、切れ目1の長さは補正されない(基本の長さ)。通過可能性の低い場合は、図7の(a)で示すように、基本長さに対して、切れ目1の長さが短くなるように補正される。通過可能性の高い場合は、図7の(c)で示すように、基本長さに対して、切れ目1の長さが長くなるように補正される。このような設定により運転者は、切れ目1の長さの大小を見ることにより、信号機の通過可能性について、より直感的に判断できる。
【0036】
図8は、切れ目1でもって青色表示領域α1を示す場合に、信号機の通過可能性の大きさに応じて、リング状回転体Kの大きさを補正するようにしてある。通過可能性が中程度の場合は、図8の(b)で示すように、リング状回転体Kの直径および幅(帯状体の幅)が基本の大きさとされる。通過可能性の低い場合は、図8の(a)で示すように、基本の大きさに対して、直径および幅共に小さくなるように補正される。通過可能性の高い場合は、図8の(c)で示すように、基本の大きさに対して、直径および幅が共に大きくされる。なお、直径のみあるいは幅のみを通過可能性に応じて変更するようにしてもよい。
【0037】
図9は、図5で示すような複数のリング状回転体K1〜K3を表示する場合に、通過可能性の低い信号機よりも遠方の信号機に対応したリング状回転体Kの表示を消去あるいは目立たなくさせるようにしたものである。すなわち、図9の例では、信号機A2の通過可能性が低いために、その後に通過する信号機A3に対応したリング状回転体K3の表示を、消去するか(表示なし)、他のリング状回転体K1、K2よりも目立たないような表示にしてある(目立たない表示としては、例えば、薄く表示したり、輪郭を破線で表示する等)。
【0038】
図10は、信号機のある交差点で交差する交差路の大きさ(幅)を、リング状回転体Kを利用して表示するようにした例を示す。すなわち、交差路の大きさが片側1車線のときは、図10の(a)で示すように、リング状回転体Kの幅が、基本の幅とされる。交差路の大きさが片側3車線の場合は、図10の(b)で示すように、リング状回転体Kの幅が、基本幅の3倍とされる。この場合、車線数が明確となるように、基本幅のリング状回転体を微少間隔をあけて3個並べるようにしてある。図示を略すが、片側2車線の場合は、基本幅のリング状回転体Kを微少間隔をあけて2個並べて表示すればよい。なお、微少間隔をあけることなく、車線数が多いほどリング状回転体の幅を大きくするようにしてもよい。
【0039】
図11は、信号機の通過可能性を、リング状回転体の回転方向によって示すようにした場合を示す。すなわち、通過可能性が高い場合あるいは中程度の場合(つまり通過可能性が低くない場合)は、図11の(b)に示すように、基本方向にリング状回転体Kが回転される。これに対して、通過可能性の低い信号機に対応したリング状回転体Kについては、上記基本方向とは逆方向に回転させるようにしてある。運転者は、リング状回転体Kの回転方向をみることによって、信号機の通過可能性を直感的に即座に判断することができる。
【0040】
図12、図13は、リング状回転体Kの脇に、信号機の通過可能性に関する補助情報を合わせて表示するようにした例を示す。すなわち、図12の場合は、リング状回転体Kの脇に、現在の速度を維持した状態であれば信号機を通過できる旨の補助表示11が表示される。補助表示11は、例えば、「この速度なら信号通過できます」という文字表示とされている。図13の例は、リング状回転体Kの脇に、赤色と青色とを選択的に表示可能な補助表示灯(パイロットランプ)12を表示するようにしてある。すなわち、信号機の通過可能性が高い場合は、補助表示灯12が青色点灯され、通過可能性が低い場合は補助表示灯12が赤色点灯される。なお、通過可能性が中程度の場合は、青色、赤色共に消灯される。
【0041】
図14は、信号機A1〜A3のうち、信号機A3が、右折した後に現れる場合が示される。すなわち、図14では、車両V(のディスプレイ上での位置が符合βで示される)が目的地に向けて経路誘導されているとき、経路誘導にしたがうと、信号機A2の位置(交差点)で右折して、その後に信号機A3が設置された状態となっている。この場合、信号機A3に対応したリング状回転体K3の脇に、方向変更マーク13(図14の場合は右折マーク)が表示される。これにより、運転者は、信号機A3については、右折後のものであることが直感的に理解できる。なお、図14では、右折の場合を示したが、現在走行している走行路から外れる走行となるときは、方向変更マーク13は、外れた方向を表示されることになり、例えば、左折、斜め右方向、斜め左方向等。なお、図14では、リング状回転体K1〜K3に対応させて、その脇に車両Vの走行路に対応した走行路表示Dが象徴的に表示されると共に、走行路表示Dの脇に、信号機A1〜A3に対応した信号機表示A1′〜A3′表示を行うようにしてある。
【0042】
図15は、複数の信号機を通過可能となる車両Vの速度範囲を表示する場合を示す。すなわち、リング状回転体Kは、切れ目1が青色表示領域α1を示すものとされ、ある幅を有する速度表示体14(実施形態では帯状矢印)が、複数の切れ目1を通過する様子が示される。この場合、速度表示体14の幅の右端が上限速度を示し、幅の左端が下限速度を示す。つまり、速度表示体14の幅が大きいほど、複数の信号機を通過できる速度の許容範囲が広いということを示す。なお、速度表示体14の幅の右端と左端に、速度を数値表示してもよく、また図15左右方向(X軸方向)に速度目盛りを付しておくようにしてもよい。
【0043】
図16は、複数のルートの信号機について、それぞれ複数のリング状回転体Kによって信号機の通過可能性を表示するようにした例を示す。すなわち、図16においては、現在の経路誘導路がルート1とされて、信号機A11,A12、A13,A14,A15を経るルートとなっている。また、ルート2は、迂回路となるもので、信号機A11から、A22,A23,A24、A14、A15を経るルートとされる。さらに、ルート3は、迂回路となるもので、信号機A11、A22、A33、A34、A15を経るルートとなっている。
【0044】
図17において、車両Vは、信号機A11にしたがってその手前で停車しており、この状態で、各ルートについての信号機の通過可能性がリング状回転体によって表示される。すなわち、図17では、信号機A11に対応したリング状回転体は表示されないで、その後の信号機に対応したリング状回転体が表示される。具体的には、ルート1についての信号機A12,A13、A14に対応したリング状回転体が、K12,K13、K14として示される。また、ルート2についての信号機A22,A23,A24に対応したリング状回転体が、K22、K23、K24として示される。さらに、ルート3についての信号機A22,A33、A34に対応したリング状回転体が、K22、K33、K34として示される。
【0045】
運転者は、各ルート1〜ルート3についての信号機の通過可能性について、各ルートに対応したリング状回転体をみることによって判断して、現在のルート1のまま走行するのか、それともルート2あるいはルート3に経路変更するかを判断できることになる。なお、図17では、各ルートについて3個のリング状回転体を示したが、4個〜5個というようにより数多く表示することにより、ルート選択をより精度よく判断できることになる。特に、各ルートでのリング状回転体の最大表示数を例えば6に設定して、この最大表示数の範囲内であれば、最終的に各ルートの集合地点となる信号機A15までの表示を行うのが好ましいものとなる。なお、経路誘導していない場合は、現在の走行路と並行する道路についての複数の信号機に対応した複数のリング状回転体を図17のように並列表示して、運転者による走行路選択の補助とすることもできる。
【0046】
図18は、ナビゲーション装置NBの制御系統をブロック図的に示すものである。この図18において、Uはマイクロコンピュータを利用して構成されたコントローラ(制御ユニット)である。この図18において、コントローラUには、地図やリング状回転体を表示するディスプレイ10の他、GPS21、地図データ22が接続され、さらに、車速センサ23から車速信号が入力される。また、通信機24を介して(例えば路車間通信やインターネット通信、電話回線通信)、交通基地局CCから多数の信号機に関する情報が入力される。
【0047】
図19は、図18に示すコントローラUの制御例を示すものである。なお、図19に示す制御例は、図5で示すように、ディスプレイ10の一部に、通常のナビゲーション用の地図表示と合わせて所定数(実施形態では3個)のリング状回転体を表示するようにしてある。
【0048】
以下、図19の制御例について説明するが、以下の説明でQはステップを示す。まず、Q1において、車両Vは、交通基地局CCと交信して、車両Vの現在の走行路の延長方向にある複数の信号機に関する情報が入手される。経路誘導中のときは、誘導経路にある信号機に関する情報が入手される。Q1で入手する情報としては、各信号機のそれぞれについて、表示状態が一巡する1サイクルの時間と、各表示状態の表示時間と、少なくともある1つの表示状態についての表示開始時刻とされる。この後、Q2において、入手された複数の信号機(に関する情報)のうち、車両Vの近い順に所定数(実施形態では3つ)の信号機(に関する情報が)選択される。
【0049】
この後、Q3において、選択された3つの信号機についてそれぞれ、Q1で入手された情報に基づいて、図4に示すようなリング状回転体K1〜K3が、各信号機に対応して作成される。この後、Q4において、現在時刻を意味する中心線O上において、車両Vの現在位置を表示する車両位置表示γに対する各リング状回転体K1〜K3の間隔が決定される(車両Vの現在位置に対する各信号機の実際の距離に応じて間隔決定)。
【0050】
Q4の後、Q5において、ディスプレイ10に対して、車両位置表示γと各リング状回転体K1〜K3とが図5に示すように表示される。勿論、各リング状回転体K1〜K3は、対応する信号機の表示切換えの1サイクルで1回転するように同方向に回転され、また、中心線Oの位置が、各信号機での現在の表示状態に対応するように表示される(中心線Oを表示することに加えてあるいは代えて、現在時刻を示す指標δを表示してもよい)。この後、Q6において、車両Vの現在の車速に応じて、各リング状回転体K1〜K3が車両位置表示γに接近するように移動される。
【0051】
Q6の後、Q7において、車両Vがもっとも近い位置にある信号機A1の位置で停車したかあるいはこの信号機を通過したか否かが判別される。このQ7の判別でNOのときは、Q5に戻る。Q7の判別でYESのときは、Q8において、通過した信号機に対応したリング状回転体K1の表示が消去された後、Q1に戻る。これにより、次の表示状態では、リング状回転体K2がK1となり、K3がK2となり、新たにリング状回転体K3が出現することになる(リング状回転体の更新)。
【0052】
以上実施形態について説明したが、本発明は、実施形態に限定されるものではなく、特許請求の範囲の記載された範囲において適宜の変更が可能であり、例えば次のような場合をも含むものである。リング状回転体Kは、扁平状の斜視図形式で表示することなく、真円状に表示するようにしてもよい。リング状回転体Kを、ナビゲーション装置NB用のディスプレイ以外に表示するようにしてもよい。例えば、リング状回転体をフロントウインドガラスの前方に表示する(ヘッドアップディスプレイ)等、リング状回転体の表示位置は適宜選択できる。車両Vにもっとも近い位置にある信号機についてのみリング状回転体Kを表示するようにしてもよい(リング状回転体Kを1つのみ表示する)。複数のリング状回転体を表示する場合に、縦方向(上下方向)に直列に表示する場合に限らず、横方向(水平方向)に直列に表示するようにしてもよい。リング状回転体Kの各種表示の仕方は、互いに排他的でない限り、任意の組み合わせでもって表示することが可能である(例えば、図8の表示状態と図10の表示状態との組み合わせで表示する等)。勿論、本発明の目的は、明記されたものに限らず、実質的に好ましいあるいは利点として表現されたものを提供することをも暗黙的に含むものである。また、本発明は、信号機通過情報の表示方法として把握することも可能である。
【産業上の利用可能性】
【0053】
本発明は、信号機の通過可能性を運転者に直観的に把握させて、運転者による主体的な走行計画を立てさせる上で役立つものである。
【符号の説明】
【0054】
V:車両
CC:交通基地局
NB:ナビゲーション装置
A、A1、A2、A3:信号機
K、K1、K2、K3:リング状回転体
α1:青色表示領域
α2:黄色表示領域
α3:赤色表示領域
β:自車両位置表示(地図対応)
γ:車両位置表示(リング状回転体に対応)
δ:指標(現在時刻対応)
O:中心線(現在時刻対応)
1:切れ目(青色表示領域対応)
10:ディスプレイ
【特許請求の範囲】
【請求項1】
自車両の走行方向にある信号機の通過可能性に関する情報を自車両の運転者に提供する信号情報提供装置であって、
リング状回転体を表示する表示手段を備え、
前記リング状回転体は、信号機が青色から再び青色になるまでの1サイクルの時間でもって1回転するように表示され、
前記リング状回転体には、前記1サイクルの時間に対する信号機の青色表示時間割合に応じた周方向長さを有する青色対応領域が設定され、
前記リング状回転体は、その手前中央部分に現在の信号機の表示状態が位置するように表示される、
ことを特徴とする信号情報提供装置。
【請求項2】
請求項1において、
前記リング状回転体が、自車両の走行方向において近い順となる複数の信号機に対応させて複数並べて表示される、ことを特徴とする信号情報提供装置。
【請求項3】
請求項2において、
前記複数のリング状回転体は、前記複数の信号機間の距離に応じた間隔を有するように直列に表示される、ことを特徴とする信号情報提供装置。
【請求項4】
請求項1ないし請求項3のいずれか1項において、
前記リング状回転体は、現在の車速を維持した状態で走行したときに、信号機を通過できる場合は全体的に青色で表示される一方、通過できない場合は全体的に赤色で表示される、ことを特徴とする信号情報提供装置。
【請求項5】
請求項1ないし請求項4のいずれか1項において、
リング状回転体は、その周方向において切れ目を有し、
前記切れ目の一端と他端との間の周方向長さが、前記青色表示領域の長さとされている、
ことを特徴とする信号情報提供装置。
【請求項6】
請求項1ないし請求項3のいずれか1項において、
リング状回転体には、前記青色表示領域の他に、信号機の赤色表示時間割合に応じた周方向長さを有する赤色表示領域と、信号機の黄色表示時間割合に応じた周方向長さを有する黄色表示領域とが設定され、
前記青色表示領域が青色で表示され、前記赤青色表示領域が赤色で表示され、前記黄色表示領域が黄色で表示される、
ことを特徴とする信号情報提供装置。
【請求項7】
請求項1ないし請求項6のいずれか1項において、
前記リング状回転体の直径が、現在の車速を維持した状態で走行したときに、信号機を通過できる可能性が高いときは低いときに比して大きくなるように表示される、ことを特徴とする信号情報提供装置。
【請求項8】
請求項1ないし請求項7のいずれか1項において、
前記リング状回転体の幅が、信号機設置位置での交差道路の幅が大きいほど大きくなるように表示される、ことを特徴とする信号情報提供装置。
【請求項9】
請求項2または請求項3において、
特定の信号機で停止される可能性の高い場合は、該特定の信号機より先にある信号機に対応したリング状回転体の表示が、非表示とされるかまたは該特定の信号機に対応したリング状回転体の表示よりも目立たなくなるような表示とされる、ことを特徴とする信号情報提供装置。
【請求項10】
請求項1ないし請求項9のいずれか1項において、
通過できる可能性の低い信号機に対応したリング状回転体の回転方向が、他のリング状回転体の回転方向とは逆方向とされる、ことを特徴とする信号情報提供装置。
【請求項11】
請求項3において、
前記複数のリング状回転体が、略上下方向に伸びる同一直線上にその中心が位置するように直列に表示され、
前記表示手段に、前記同一軸線上において自車両位置が表示される、
ことを特徴とする信号情報提供装置。
【請求項12】
請求項11において、
自車両の速度に応じて、自車両の表示位置に対する複数のリング状回転体の接近速度が変化するように表示される、ことを特徴とする信号情報提供装置。
【請求項1】
自車両の走行方向にある信号機の通過可能性に関する情報を自車両の運転者に提供する信号情報提供装置であって、
リング状回転体を表示する表示手段を備え、
前記リング状回転体は、信号機が青色から再び青色になるまでの1サイクルの時間でもって1回転するように表示され、
前記リング状回転体には、前記1サイクルの時間に対する信号機の青色表示時間割合に応じた周方向長さを有する青色対応領域が設定され、
前記リング状回転体は、その手前中央部分に現在の信号機の表示状態が位置するように表示される、
ことを特徴とする信号情報提供装置。
【請求項2】
請求項1において、
前記リング状回転体が、自車両の走行方向において近い順となる複数の信号機に対応させて複数並べて表示される、ことを特徴とする信号情報提供装置。
【請求項3】
請求項2において、
前記複数のリング状回転体は、前記複数の信号機間の距離に応じた間隔を有するように直列に表示される、ことを特徴とする信号情報提供装置。
【請求項4】
請求項1ないし請求項3のいずれか1項において、
前記リング状回転体は、現在の車速を維持した状態で走行したときに、信号機を通過できる場合は全体的に青色で表示される一方、通過できない場合は全体的に赤色で表示される、ことを特徴とする信号情報提供装置。
【請求項5】
請求項1ないし請求項4のいずれか1項において、
リング状回転体は、その周方向において切れ目を有し、
前記切れ目の一端と他端との間の周方向長さが、前記青色表示領域の長さとされている、
ことを特徴とする信号情報提供装置。
【請求項6】
請求項1ないし請求項3のいずれか1項において、
リング状回転体には、前記青色表示領域の他に、信号機の赤色表示時間割合に応じた周方向長さを有する赤色表示領域と、信号機の黄色表示時間割合に応じた周方向長さを有する黄色表示領域とが設定され、
前記青色表示領域が青色で表示され、前記赤青色表示領域が赤色で表示され、前記黄色表示領域が黄色で表示される、
ことを特徴とする信号情報提供装置。
【請求項7】
請求項1ないし請求項6のいずれか1項において、
前記リング状回転体の直径が、現在の車速を維持した状態で走行したときに、信号機を通過できる可能性が高いときは低いときに比して大きくなるように表示される、ことを特徴とする信号情報提供装置。
【請求項8】
請求項1ないし請求項7のいずれか1項において、
前記リング状回転体の幅が、信号機設置位置での交差道路の幅が大きいほど大きくなるように表示される、ことを特徴とする信号情報提供装置。
【請求項9】
請求項2または請求項3において、
特定の信号機で停止される可能性の高い場合は、該特定の信号機より先にある信号機に対応したリング状回転体の表示が、非表示とされるかまたは該特定の信号機に対応したリング状回転体の表示よりも目立たなくなるような表示とされる、ことを特徴とする信号情報提供装置。
【請求項10】
請求項1ないし請求項9のいずれか1項において、
通過できる可能性の低い信号機に対応したリング状回転体の回転方向が、他のリング状回転体の回転方向とは逆方向とされる、ことを特徴とする信号情報提供装置。
【請求項11】
請求項3において、
前記複数のリング状回転体が、略上下方向に伸びる同一直線上にその中心が位置するように直列に表示され、
前記表示手段に、前記同一軸線上において自車両位置が表示される、
ことを特徴とする信号情報提供装置。
【請求項12】
請求項11において、
自車両の速度に応じて、自車両の表示位置に対する複数のリング状回転体の接近速度が変化するように表示される、ことを特徴とする信号情報提供装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−97721(P2013−97721A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−242497(P2011−242497)
【出願日】平成23年11月4日(2011.11.4)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月4日(2011.11.4)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
[ Back to top ]