
信号捕捉方法、通信信号受信方法、GNSS信号受信方法、信号捕捉プログラム、通信信号受信プログラム、GNSS信号受信プログラム、信号捕捉装置、通信信号受信装置、GNSS信号受信装置、および移動端末
【課題】従来の方法よりも簡素な方法で素早く確実に、所望のGPS信号を捕捉できる信号捕捉方法を実現する。
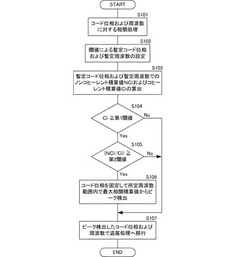
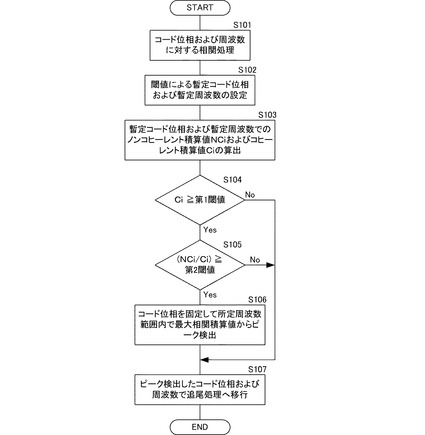
【解決手段】暫定コード位相および暫定周波数で、ノンコヒーレント積算値NCiとコヒーレント積算Ciとを算出する(S103)。ノンコヒーレント積算値NCiとコヒーレント積算Ciとが共に検証用閾値より低い(S104:Yes)、もしくはノンコヒーレント積算値NCiが検証用閾値より高く、ノンコヒーレント積算値NCiとコヒーレント積算Ciとが同程度であれば(S105:Yes)、暫定コード位相および暫定周波数を真のコード位相および真の周波数に設定する(S107)。ノンコヒーレント積算値NCiが検証用閾値より高く、ノンコヒーレント積算値NCiとコヒーレント積算Ciとに所定強度以上の差があれば、コード位相を固定して再度捕捉処理を行い(S106)、真の周波数を検出する(S107)。
【解決手段】暫定コード位相および暫定周波数で、ノンコヒーレント積算値NCiとコヒーレント積算Ciとを算出する(S103)。ノンコヒーレント積算値NCiとコヒーレント積算Ciとが共に検証用閾値より低い(S104:Yes)、もしくはノンコヒーレント積算値NCiが検証用閾値より高く、ノンコヒーレント積算値NCiとコヒーレント積算Ciとが同程度であれば(S105:Yes)、暫定コード位相および暫定周波数を真のコード位相および真の周波数に設定する(S107)。ノンコヒーレント積算値NCiが検証用閾値より高く、ノンコヒーレント積算値NCiとコヒーレント積算Ciとに所定強度以上の差があれば、コード位相を固定して再度捕捉処理を行い(S106)、真の周波数を検出する(S107)。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、受信信号から所望とする信号を捕捉する信号捕捉方法に関する。より具体的な一例としては、拡散コードでコード変調されたGNSS測位信号の捕捉方法に関する。
【背景技術】
【0002】
現在、GNSS(Global Navigation Satellite System)の一つとして、GPS(Global Positioning System)がある。GPS信号受信装置は、測位衛星からのGPS信号を受信すると、所定のコード位相及び周波数で捕捉し、追尾する。GPS信号受信装置は、捕捉・追尾処理により得た航法メッセージ、コード位相、キャリア位相を用いて、測位演算を行う。
【0003】
このようなGPS信号の捕捉において、クロスコリレーションによる誤った捕捉が問題となっている。クロスコリレーションとは、例えば、捕捉しようとしている所望のGPS衛星からのGPS衛星の信号レベルが低く、他のGPS衛星からの信号レベルが高いような場合に発生する。そして、クロスコリレーションは、当該他のGPS衛星からのGPS信号を受信することにより、所望とするGPS信号とは異なるコード位相および周波数で相関ピークが検出されて、所望のGPS信号とは異なる他のGPS信号を捕捉してしまう現象である。
【0004】
このようなクロスコリレーションに対して、例えば特許文献1の方法では、相関値の積算値の飽和タイミングまでの時間により、所望とするGPS衛星からのGPS信号を捕捉したか、クロスコリレーションの影響を受けているかを検出している。
【0005】
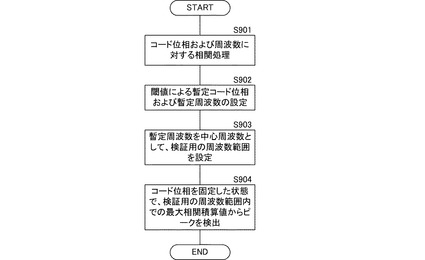
また、従来の一般的なGPS信号の捕捉方法について、図を参照して説明する。図1は従来の一般的なGPS信号の捕捉方法を示すフローチャートである。
【0006】
従来のGPS信号の捕捉方法では、複数の相関器に対して、それぞれ異なる周波数および異なるコード位相タイミングでレプリカ信号を与える。各相関器は、GPS信号(より具体的にはGPS信号に基づくIF信号)とレプリカ信号とを相関処理する。相関値は、所定時間長(例えば1msec.)に亘り積算され、コード位相と周波数の組合せ毎に、相関積算値が算出される(S901)。
【0007】
あるコード位相および周波数で、相関積算値が、予め設定した暫定検出用の閾値以上であることを検出すると、当該コード位相および周波数を捕捉用の暫定コード位相および暫定周波数に設定する(S902)。
【0008】
次に、前記暫定周波数を中心周波数として、検証用の周波数範囲(例えば、400Hz帯域)を設定する(S903)。
【0009】
次に、暫定コード位相にコード位相を固定し、所定周波数間隔(例えば50Hz間隔)で順次周波数を変化させて相関積算値を取得し、検証用の周波数範囲内で、最も高い相関積算値となる周波数を検出する(S904)。そして、当該周波数を所望のGPS信号のメインローブのピーク周波数として判断し、当該コード位相と周波数で所望のGPS信号を捕捉したと判断する。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2008−160642号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、特許文献1に示す方法では、クロスコリレーションの影響が有ると判断した場合、例えば1秒程度以上に亘り積算を続けなければならず、さらに、積算後に別途クロスコリレーションの判別処理を行わなければならない。したがって、捕捉処理に係る負荷が大きくなるとともに、捕捉にかかる時間が長くなってしまう。
【0012】
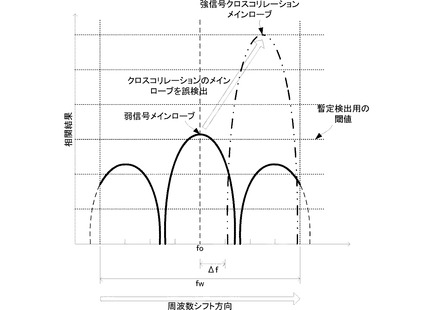
また、上述の従来の一般的なGPS信号の捕捉方法では、図2に示すような問題を生じる可能性がある。図2は、捕捉対象のGPS信号の相関積算値が低く、他のGPS信号の相関積算値が高い場合の信号捕捉状態を示す概念図である。
【0013】
上述の従来の一般的なGPS信号の捕捉方法では、図2に示すように、所望のGPS信号が弱信号(受信時の信号レベルが低く相関値の低い信号)であれば、メインローブによる相関値が低いので、メインローブが直接検出される可能性がある。ここで、図2に示すように、強信号のクロスコリレーションが周波数範囲内に存在する場合を考える。
【0014】
この場合、メインローブによる相関積算値よりもクロスコリレーションによる相関積算値の方が高くなる。したがって、クロスコリレーションのメインローブの周波数およびコード位相を、所望のGPS信号の周波数およびコード位相として誤検出してしまい、誤った捕捉を行ってしまう。
【0015】
本発明の目的は、従来の方法よりも簡素な方法で素早く確実に、所望のGPS信号を捕捉できる信号捕捉方法を実現することにある。
【課題を解決するための手段】
【0016】
この発明は、所定周波数の搬送波を拡散コードでコード変調してなる通信信号を捕捉する信号捕捉方法に関する。この信号捕捉方法では、次の処理を実行する各工程を有する。
【0017】
(A)拡散コードのレプリカコードを有するレプリカ信号と前記通信信号の受信信号とを相関処理する。
【0018】
(B)相関処理の結果に基づいて、所望の通信信号を捕捉する暫定周波数を設定する。
【0019】
(C)暫定周波数での相関値から、異なる演算方法で複数の相関積算値を算出する。
【0020】
(D)複数の相関積算値と暫定周波数とから通信信号の周波数を設定する。
【0021】
この方法では、一般的な信号捕捉(サーチ)方法を用いて、通信信号の暫定周波数が決定された後に、これらの検証が、暫定周波数による相関積算値のみを用いて実行される。
【0022】
また、この発明の信号捕捉方法における相関処理を行う工程では、拡散コードのレプリカコードを有するレプリカ信号と通信信号の受信信号とを所定周波数間隔でそれぞれ相関処理する。この方法では、相関処理を行う具体的な方法について示している。
【0023】
また、この発明の信号捕捉方法における複数の相関積算値を算出する異なる演算方法は、相関値としてI相関値とQ相関値とを用い、次の二種類の積算方法を用いている。ノンコヒーレント積算は、I相関値とQ相関値とから相関値パワーを算出し、当該相関値パワーを所定期間に亘り積算する処理である。コヒーレント積算は、I相関値とQ相関値とをそれぞれ所定期間に亘り積算し、該積算値のパワーを算出する処理である。
【0024】
この方法では、上述の複数の相関積算値の具体的な算出方法について示しており、同じI相関値およびQ相関値を用いながら演算方法が異なる、コヒーレント積算とノンコヒーレント積算とを用いる場合を示している。
【0025】
また、この発明の信号捕捉方法では、コヒーレント積算値が第1閾値以上であり、該コヒーレント積算値を基準としたノンコヒーレント積算値の比が第2の閾値以上である場合に、暫定周波数に基づく所定周波数範囲内で周波数を変化させながら、レプリカ信号と受信信号とをそれぞれ相関処理する。そして、相関処理結果に基づいて、該所定周波数範囲内における最大の相関積算値となる周波数を、所望の通信信号の周波数に設定する。
【0026】
この方法では、上述のように、暫定コード位相および暫定周波数で捕捉した通信信号がサイドローブであった場合の判断基準を示している。強信号(振幅の高い通信信号)のサイドローブではノンコヒーレント積算値が高く、ノンコヒーレント積算値はコヒーレント積算値と比較して、所定強度以上低くなる。例えば、シミュレーションを行った結果では、コヒーレント積算値は、メインローブに隣接するサイドローブではメインローブに対して13dB程度低い値となる。一方、ノンコヒーレント積算値はサイロローブでもメインローブでも殆ど変化しない。
【0027】
したがって、ノンコヒーレント積算値が高く、ノンコヒーレント積算値がコヒーレント積算値と比較して所定強度以上高い場合には、暫定周波数として捕捉した周波数のタイミングは、所望とする(捕捉対象である)通信信号が強信号であって、当該通信信号のサイドローブによる相関結果に基づくものと判断できる。
【0028】
そして、このようにサイドローブを捕捉したとしても、通信信号が強信号であり、捕捉したサイドローブの近傍に、より相関積算値が高いメインローブが確実に存在するので、当該暫定周波数を中心周波数として周波数範囲を決定し、再捕捉処理を行っても、クロスコリレーションに影響されることなく、確実にメインローブを捕捉することができる。
【0029】
また、この発明の信号捕捉方法では、暫定周波数に基づく所定周波数範囲内で周波数間隔を、暫定周波数を設定する工程で用いる周波数間隔よりも小さくする。
【0030】
この方法では、暫定周波数でサイドローブを検出した場合であっても、メインローブをサーチする周波数間隔が狭くなり、メインローブの周波数を高精度に検出することができる。
【0031】
また、この発明の信号捕捉方法では、コヒーレント積算値とノンコヒーレント積算値との比が第2の閾値未満である場合に、暫定周波数を、所望の通信信号の周波数とする、信号捕捉方法。
【0032】
この方法では、上述のコヒーレント積算値とノンコヒーレント積算値とを用いた場合での判断基準を示している。通信信号の相関特性は、受信した通信信号の振幅が高くても低くても、積算時間が同じであればメインローブではノンコヒーレント積算値もコヒーレント積算値も同程度である。ただし、受信した通信信号の振幅が高ければ当然にこれらの積算値も高くなり、受信した通信信号の振幅が低ければ当然にこれらの積算値も低くなる。
【0033】
したがって、ノンコヒーレント積算値が高く、該ノンコヒーレント積算値とコヒーレント積算値とが略同じである場合、もしくは、ノンコヒーレント積算値とコヒーレント積算値とがともに低い場合には、暫定コード位相および暫定周波数として捕捉したコード位相および周波数のタイミングは、所望とする(捕捉対象である)通信信号のメインローブによる相関結果に基づくものと判断できる。
【0034】
また、この発明の通信信号受信方法では、上述の信号捕捉方法によって捕捉した通信信号を追尾する工程と、追尾した通信信号に含まれる情報を復調する工程と、を有する。
【0035】
この方法では、上述の信号捕捉方法を利用した信号受信方法について示している。上述の方法を用いることで、クロスコリレーションの影響等を受けることなく、確実に通信信号を捕捉できるので、通信信号に含まれる情報を確実に復調することができる。
【0036】
また、この発明のGNSS信号受信方法では、上述の通信信号受信方法を利用する。この場合、通信信号はGNSS信号であって、情報は航法メッセージである。そして、GNSS信号受信方法は、GNSS信号から疑似距離を算出する工程と、疑似距離と航法メッセージとを用いて測位演算を行う工程と、を有する。
【0037】
この方法では、上述の信号捕捉方法を含む通信信号受信方法を用いたGNSS信号受信方法について示している。上述の通信信号受信方法を用いていることで、GNSS信号を確実に捕捉・追尾し、航法メッセージおよび疑似距離を、正確に取得することができる。これにより、高精度な測位演算が可能となる。
【発明の効果】
【0038】
この発明によれば、簡素な方法で素早く確実に所望のGPS信号を捕捉することができる。特に、クロスコリレーションによる誤った捕捉を防ぐことができる。
【図面の簡単な説明】
【0039】
【図1】従来の一般的なGPS信号の捕捉方法を示すフローチャートである。
【図2】従来法による捕捉対象のGPS信号の相関積算値が低く、他のGPS信号の相関積算値が高い場合の信号捕捉状態を示す概念図である。
【図3】本発明の実施形態に係るGPS信号受信装置1の主要機能部を示すブロック図である。
【図4】ベースバンド処理部30の機能ブロック図である。
【図5】ベースバンド処理部30で実行されるGPS信号捕捉処理のフローチャートである。
【図6】強信号および弱信号のコヒーレント積算値Ciおよびノンコヒーレント積算値NCiの周波数特性を示す図である。
【図7】本発明の実施形態のGPS信号受信装置1を備えた移動端末100の主要構成を示すブロック図である。
【発明を実施するための形態】
【0040】
本発明の実施形態に係る信号捕捉方法、信号捕捉プログラムについて、図を参照して説明する。また、当該信号捕捉方法を機構的に実現するための信号捕捉装置についても説明する。なお、本実施形態では、信号捕捉方法としてGNSS信号(特にGPS信号)の捕捉方法を示すとともに、当該捕捉方法で捕捉したGNSS信号を追尾し、航法メッセージ等を復調して測位演算を行うGNSS信号受信方法について示す。
【0041】
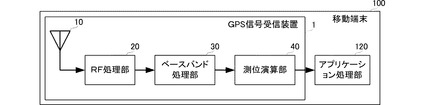
図3は本実施形態に係るGPS信号受信装置1の主要機能部を示すブロック図である。図3に示すように、GPS信号受信装置1は、GPS受信アンテナ10、RF処理部20、ベースバンド処理部30、測位演算部40を備える。
【0042】
GPS受信アンテナ10は、GPS衛星(図示せず)で放送されるGPS信号を受信する。GPS信号は、所定の周波数(L1波の場合1575.42MHz)の搬送波に対して、航法メッセージが重畳され、さらに、所定の拡散コード(L1波の場合C/Aコード)によるコード変調が行われた信号である。GPS受信アンテナ10による受信信号は、RF処理部20へ出力する。この受信信号には、捕捉・追尾対象である所望のGPS衛星からのGPS信号を含み、他のGPS衛星からのGPS信号等を含む信号である。
【0043】
RF処理部20は、受信信号に対してダウンサンプリングを行うことで中間周波数信号(IF信号)を生成し、ベースバンド処理部30へ出力する。
【0044】
ベースバンド処理部30は、本願の信号捕捉装置に相当する機能部であり、詳細な構成及び処理については後述する。ベースバンド処理部30は、所望とするGPS信号の拡散コードを有するレプリカ信号とIF信号とを相関処理した結果に基づいて、所望とするGPS信号の捕捉・追尾処理を行う。ベースバンド処理部30は、航法メッセージの元となる追尾時の相関処理結果を測位演算部40へ出力する。ベースバンド処理部30は、追尾処理用のコード位相差に基づいて疑似距離を算出し、測位演算部40へ出力する。
【0045】
測位演算部40は、ベースバンド処理部30から得られる追尾時の相関処理結果に基づいて航法メッセージを復調する。測位演算部40は、復調した航法メッセージと、ベースバンド処理部30からの疑似距離を用いて測位演算を行い、自装置位置を算出する。
【0046】
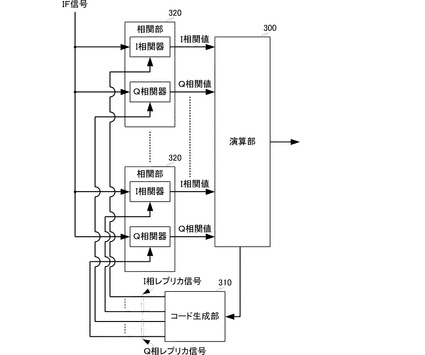
次に、ベースバンド処理部30で実行される詳細なGPS信号捕捉処理について説明する。図4はベースバンド処理部30の機能ブロック図である。
【0047】
ベースバンド処理部30は、演算部300、コード生成部310、所定数の相関部320を備える。演算部300は、GPS信号の捕捉処理とともに、捕捉したGPS信号の追尾処理、および疑似距離算出処理を実行する。演算部300は、これらの処理を実行するための処理プログラムが記憶された記憶部と、これら処理プログラムを読み出し実行するCPU等の演算素子とを備える。
【0048】
コード生成部310は、演算部300から設定されたコード位相および周波数に基づいて、所定のコード位相および所定の周波数からなり、所望とするGPS信号の拡散コードを含むレプリカ信号を生成する。コード生成部310は、コード位相が異なる複数のレプリカ信号を各相関部320へ出力する。この際、コード生成部310は、レプリカ信号として複素信号における実数部であるI相レプリカ信号と虚数部であるQ相レプリカ信号とを組にして、各相関部320へ出力する。
【0049】
各相関部320は、I相レプリカ信号とIF信号とを相関処理してI相関値を出力するとともに、Q相レプリカ信号とIF信号とを相関処理してQ相関値を出力する。なお、相関部320の数は、同時に相関処理を行うコード位相数および周波数の数に基づいて決定される。例えば、1023chipを一単位とするC/Aコードに対して1chipのコード位相間隔で、コード全体を一周波数で同時に相関処理する場合、相関部320を1024個用意すればよい。
【0050】
このような構成のベースバンド処理部30は、信号の捕捉時に図5に示すような処理を実行する。図5はベースバンド処理部30で実行されるGPS信号捕捉処理のフローチャートである。
【0051】
まず、ベースバンド処理部30の相関部320は、所定コード位相間隔および所定周波数間隔のレプリカ信号とIF信号とを相関処理する(S101)。具体的には、例えば、1023chipのC/Aコードに対して1chip間隔でコード全体に亘り、且つ、1575.42MHzを基準周波数として8000Hzの周波数幅に対して1kHz間隔で、相関処理を行い、それぞれにI相関値およびQ相関値を算出する。
【0052】
このようなコード位相軸および周波数軸の二次元における相関処理を、上述のような同時に1コード分の各コード位相での相関処理が可能な構成で実行する。この場合、図示しないバッファメモリ等により一次記憶しておいたIF信号に対して、周波数を所定間隔で変化させることで可能になる。
【0053】
ベースバンド処理部30の演算部300は、各相関部320から出力された相関値を、暫定捕捉用の積算時間だけ、コヒーレント積算し、暫定捕捉用のコヒーレント積算値を算出する。具体的には、暫定捕捉用の積算時間は、例えば1msec.である。また、暫定捕捉用のコヒーレント積算値は、I相関値とQ相関値をそれぞれ暫定捕捉用の積算時間分(この場合、1msec.)、積算した後に、パワー算出する処理で得られる。そして、このパワー算出とは、I相関値の積算値の二乗とQ相関値の二乗とを加算し、加算値の平方根を算出する処理である。
【0054】
演算処理部300は、コード位相軸と周波数軸の二次元で得られた暫定捕捉用コヒーレント積算値を、コード位相軸方向および周波数軸方向に掃引しながら、順次、捕捉用閾値以上であるかどうかを判断する。ここで、具体的なコード位相軸方向および周波数軸方向の掃引方法としては、まず一周波数(例えば、最低周波数)において、コード位相軸方向に沿って、暫定捕捉用コヒーレント積算値と暫定捕捉用閾値とを比較していく。ここで、暫定捕捉用閾値以上の暫定捕捉用コヒーレント積算値が無ければ、周波数を変化させて(例えば周波数を、上記周波数間隔分だけ高く設定し)、同様の比較処理を行っていく。なお、暫定捕捉用閾値は、予め対象とするGPS信号の仕様や受信装置の受信感度等に応じて捕捉の実験及びシミュレーション等を行っておくことで、適宜設定されている。
【0055】
そして、演算部300は、最初に捕捉用閾値以上となる暫定捕捉用コヒーレント積算値を検出すると、当該暫定捕捉用コヒーレント積算値に対応するコード位相および周波数を、暫定コード位相および暫定周波数に設定する(S102)。
【0056】
演算部300は、暫定コード位相および暫定周波数での相関値を、暫定捕捉用の積算時間よりも長い検証用の積算時間分、順次取得し、検証用のコヒーレント積算値Ciおよびノンコヒーレント積算NCiを算出する(S103)。具体的には、検証用の積算時間は、例えば10msec.である。
【0057】
ここで、検証用のコヒーレント積算値Ciは、I相関値とQ相関値をそれぞれ暫定捕捉用の積算時間分(この場合、10msec.)、積算した後に、パワー算出することで得られる。そして、このパワー算出とは、I相関値の積算値の二乗とQ相関値の二乗とを加算し、加算値の平方根を算出する処理である。
【0058】
検証用のノンコヒーレント積算値NCiは、I相関値とQ相関値とからパワー算出を行い、パワーを検証用の積算時間分(この場合、10msec.)、積算する処理で得られる。したがって、ノンコヒーレント積算で算出するパワーは、コヒーレント積算と異なり、I相関値の二乗とQ相関値の二乗とを加算し、加算値の平方根を算出する処理となる。
【0059】
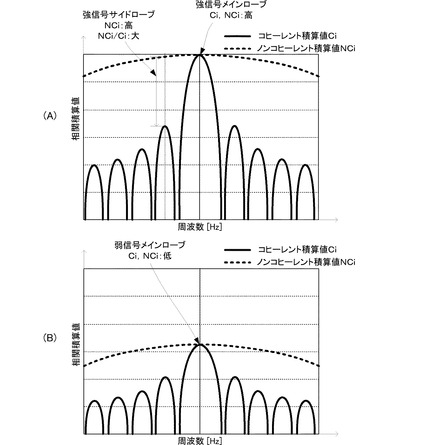
このように算出されるコヒーレント積算値Ciとノンコヒーレント積算値NCiは、図6に示すような周波数特性を有する。図6は強信号および弱信号のコヒーレント積算値Ciおよびノンコヒーレント積算値NCiの周波数特性を示す図であり、図6(A)が強信号の場合、図6(B)が弱信号の場合を示す。また、図6において、実線がコヒーレント積算値Ciの特性であり、破線がノンコヒーレント積算値NCiの特性である。ここで、強信号とは受信時の信号強度が高い信号であり、例えば受信環境が良好な場合に得られる信号である。また、弱信号とは受信時の信号強度が低い信号であり、例えば受信環境が比較的良くない場合に得られる信号である。
【0060】
図6(A)、(B)に示すように、メインローブに対するコヒーレント積算値Ciおよびノンコヒーレント積算値NCiは、信号の強弱に限らず、略一致した値となる。
【0061】
弱信号の場合には、図6(B)に示すように、これらコヒーレント積算値Ciおよびノンコヒーレント積算値NCiは共に低くなる。したがって、検証用のコヒーレント積算値Ciおよびノンコヒーレント積算値NCiが共に低ければ、暫定コード位相および暫定周波数は、弱信号である所望のGPS信号のメインローブから得られたものと判断できる。
【0062】
強信号の場合には、図6(A)に示すように、これらコヒーレント積算値Ciおよびノンコヒーレント積算値NCiは共に高くなる。したがって、検証用のコヒーレント積算値Ciおよびノンコヒーレント積算値NCiが共に高ければ、暫定コード位相および暫定周波数は、強信号である所望のGPS信号のメインローブから得られたものと判断できる。
【0063】
この特性を利用して、検証用閾値(第1閾値に相当する。)を設定し、コヒーレント積算値Ciおよびノンコヒーレント積算値NCiが共に検証用閾値よりも低ければ、所望のGPS信号は弱信号であるものの、暫定捕捉で所望のGPS信号を捕捉できたものする。そして、暫定コード位相および暫定周波数を、捕捉処理による正式なコード位相および周波数に設定する。なお、検証用閾値は、上述の暫定捕捉用閾値に基づいて、積算時間の差等を加味して設定されている。
【0064】
また、前記検証用閾値に対してコヒーレント積算値Ciが高く、コヒーレント積算値Ciとノンコヒーレント積算NCiとが略一致すれば(所定の比率内であれば)、所望のGPS信号は強信号であり、暫定捕捉で所望のGPS信号を捕捉できたものとする。そして、暫定コード位相および暫定周波数を、捕捉処理による正式なコード位相および周波数に設定する。
【0065】
ここで、強信号の場合に、コヒーレント積算値Ciとノンコヒーレント積算値NCiとが共に検証用閾値以上の場合に、単純にメインローブによる相関と判定しないのは、次の理由による。
【0066】
図6(A)に示すように、強信号の場合、メインローブに隣接する(本実施形態の捕捉処理では、±150Hz離間した位置の)サイドローブであっても、ノンコヒーレント積算値NCiとコヒーレント積算Ciとが高くなる。したがって、単に、ノンコヒーレント積算値NCiとコヒーレント積算Ciとが共に検証用閾値以上に設定すると、サイドローブの周波数を、捕捉の周波数に誤設定してしまうことになる。
【0067】
ここで、図6(A)に示すように、サイドローブの場合、ノンコヒーレント積算値NCiはメインローブ同様に高くなるが、コヒーレント積算値Ciは低くなる。具体的には、実験的に得られた結果では、50dBの強度を有するメインローブを有する強信号の場合、ノンコヒーレント積算値NCiに対して、コヒーレント積算値Ciが13dB程度低くなる。この特性を利用し、コヒーレント積算値Ciを基準としたノンコヒーレント積算値NCiの比を算出する。そして、この比がサイドローブ検出用の閾値(第2閾値に相当する。)以上であれば、暫定捕捉により、サイドローブを捕捉したもの判断する。なお、このサイドローブ検出用の閾値は、別処理により得られる信号強度に関連する値(例えばC/No等)から適宜設定すればよい。
【0068】
このような概念を利用し、演算部300は、コヒーレント積算値Ciが前記検出用閾値に相当する第1閾値よりも低ければ(S104:No)、暫定コード位相および暫定周波数を、捕捉の正式なコード位相および周波数に設定し、当該コード位相および周波数を初期値とする追尾処理へ移行する(S107)。
【0069】
演算部300は、コヒーレント積算値NCiが第1閾値以上であり(S104:Yes)、コヒーレント積算値Ciを基準としたノンコヒーレント積算値NCiの比(NCi/Ci)が第2閾値未満であれば(S105:No)、暫定コード位相および暫定周波数を、捕捉の正式なコード位相および周波数に設定し、当該コード位相および周波数を初期値とする追尾処理へ移行する(S107)。ここで、第2閾値は、例えば3〜4程度に設定すればよい。言い換えれば、コヒーレント積算値Ciに対してノンコヒーレント積算値NCiが3倍〜4倍未満であることを目安とすればよい。なお、ここでは、比を用いているが、コヒーレント積算値Ciとノンコヒーレント積算値NCiとの差分値を用いてもよい。
【0070】
このような処理を行うことで、所望のGPS信号のメインローブを暫定捕捉で直接捕捉した場合に、当該所望とするGPS信号の捕捉周波数および捕捉コード位相を確実に取得することができる。特に弱信号の場合、従来技術に示すようなクロスコリレーションを誤って捕捉することを防止できる。
【0071】
なお、本実施形態の説明では、S104の処理後にS105の処理を実行する例を示したが、S105の処理後にS104の処理を実行してもよい。
【0072】
演算部300は、コヒーレント積算値NCiが第1閾値以上であり(S104:Yes)、コヒーレント積算値Ciを基準としたノンコヒーレント積算値NCiの比(NCi/Ci)が第2閾値以上であれば(S105:Yes)、暫定コード位相を固定し、コード位相を固定した状態で、暫定周波数を中心周波数として、再捕捉用の周波数範囲を設定する。例えば、具体的には、この再捕捉用の周波数範囲を±500Hzに設定し、50Hzの周波数間隔に設定する。このように周波数範囲を広げて再捕捉を行っても、ノンコヒーレント積算値NCiが高いので、所望のGPS信号は強信号であり、クロスコリレーションの影響を受けないので問題とはならない。また、周波数間隔を小さくすることで、より高精度に周波数を捕捉することが可能になる。
【0073】
演算部300は、当該周波数範囲において、従来技術に示したように、所定の周波数間隔で相関処理を行い、コヒーレント積算値を算出する。そして、演算部300は、コヒーレント積算値が最大値となる周波数を、捕捉の周波数に設定する(S106)。このような処理を行うことで、所望のGPS信号が強信号であり、サイドローブを暫定捕捉しても、確実にメインローブを捕捉しなおすことができる。演算部300は、このように再取得した周波数と固定したコード位相を初期値として、追尾処理へ移行する(S107)。
【0074】
以上のように、本実施形態の構成及び処理を用いることで、信号強度やクロスコリレーションの影響を受けることなく、所望のGPS信号を正確且つ確実に捕捉することができる。この際、従来のような煩雑な処理を行うことなく、所望のGPS信号を捕捉できるので、簡素且つ高速な捕捉処理が可能になる。
【0075】
また、このように所望のGPS信号を正確に捕捉することで、追尾処理を、より正確且つ高速に行うことができる。そして、追尾処理が正確になることで、高精度な疑似距離が得られるとともに、航法メッセージを正確且つ確実に復調することができる。この結果、測位演算を高精度に行うことができる。
【0076】
なお、上述の説明では、GNSS信号の捕捉、受信方法を例に説明したが、拡散コードによりコード変調された通信信号を捕捉して利用する装置や分野であれば、当該発明の構成及び方法、プログラムを適用し、同様の作用効果を得ることができる。
【0077】
また、上述の説明では、コヒーレント積算値Ciの積算時間とノンコヒーレント積算値NCiの積算時間を同じに設定したが、異ならせてもよい。この場合、積算時間の差もしくは比に応じて、第2閾値を適宜設定すればよい。
【0078】
また、上述の説明では、捕捉用の全てのコード位相を一括で出力して周波数を順次変化させる方法を用いたが、捕捉用の全ての周波数を一括で出力してコード位相を順次変化させる方法を用いることも可能である。
【0079】
そして、このようなGPS信号受信装置1やGPS信号受信機能は、図7に示すような移動端末100に利用される。図7は、本実施形態のGPS信号受信装置1を備えた移動端末100の主要構成を示すブロック図である。
【0080】
図7に示すような移動端末100は、例えば携帯電話機、カーナビゲーション装置、PND、カメラ、時計等であり、アンテナ10、RF処理部20、ベースバンド処理部30、測位演算部40、アプリケーション処理部130を備える。アンテナ10、RF処理部20、ベースバンド処理部30、測位演算部40は、上述の構成のものであり、これらにより上述のようにGPS信号受信装置1が構成されている。
【0081】
アプリケーション処理部130は、GPS信号受信装置1から出力された測位結果に基づいて、自装置位置や自装置速度を表示したり、ナビゲーション等に利用するための処理を実行する。
【0082】
このような構成において、上述の高精度な測位結果を得られることで、高精度な位置表示やナビゲーション等を実現することができる。
【符号の説明】
【0083】
1:GPS信号受信装置、10:GPS受信アンテナ、20:RF処理部、30:ベースバンド処理部、40:測位演算部、300:演算部、310:コード生成部、320:相関部、
100:移動端末、130:アプリケーション処理部
【技術分野】
【0001】
この発明は、受信信号から所望とする信号を捕捉する信号捕捉方法に関する。より具体的な一例としては、拡散コードでコード変調されたGNSS測位信号の捕捉方法に関する。
【背景技術】
【0002】
現在、GNSS(Global Navigation Satellite System)の一つとして、GPS(Global Positioning System)がある。GPS信号受信装置は、測位衛星からのGPS信号を受信すると、所定のコード位相及び周波数で捕捉し、追尾する。GPS信号受信装置は、捕捉・追尾処理により得た航法メッセージ、コード位相、キャリア位相を用いて、測位演算を行う。
【0003】
このようなGPS信号の捕捉において、クロスコリレーションによる誤った捕捉が問題となっている。クロスコリレーションとは、例えば、捕捉しようとしている所望のGPS衛星からのGPS衛星の信号レベルが低く、他のGPS衛星からの信号レベルが高いような場合に発生する。そして、クロスコリレーションは、当該他のGPS衛星からのGPS信号を受信することにより、所望とするGPS信号とは異なるコード位相および周波数で相関ピークが検出されて、所望のGPS信号とは異なる他のGPS信号を捕捉してしまう現象である。
【0004】
このようなクロスコリレーションに対して、例えば特許文献1の方法では、相関値の積算値の飽和タイミングまでの時間により、所望とするGPS衛星からのGPS信号を捕捉したか、クロスコリレーションの影響を受けているかを検出している。
【0005】
また、従来の一般的なGPS信号の捕捉方法について、図を参照して説明する。図1は従来の一般的なGPS信号の捕捉方法を示すフローチャートである。
【0006】
従来のGPS信号の捕捉方法では、複数の相関器に対して、それぞれ異なる周波数および異なるコード位相タイミングでレプリカ信号を与える。各相関器は、GPS信号(より具体的にはGPS信号に基づくIF信号)とレプリカ信号とを相関処理する。相関値は、所定時間長(例えば1msec.)に亘り積算され、コード位相と周波数の組合せ毎に、相関積算値が算出される(S901)。
【0007】
あるコード位相および周波数で、相関積算値が、予め設定した暫定検出用の閾値以上であることを検出すると、当該コード位相および周波数を捕捉用の暫定コード位相および暫定周波数に設定する(S902)。
【0008】
次に、前記暫定周波数を中心周波数として、検証用の周波数範囲(例えば、400Hz帯域)を設定する(S903)。
【0009】
次に、暫定コード位相にコード位相を固定し、所定周波数間隔(例えば50Hz間隔)で順次周波数を変化させて相関積算値を取得し、検証用の周波数範囲内で、最も高い相関積算値となる周波数を検出する(S904)。そして、当該周波数を所望のGPS信号のメインローブのピーク周波数として判断し、当該コード位相と周波数で所望のGPS信号を捕捉したと判断する。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2008−160642号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、特許文献1に示す方法では、クロスコリレーションの影響が有ると判断した場合、例えば1秒程度以上に亘り積算を続けなければならず、さらに、積算後に別途クロスコリレーションの判別処理を行わなければならない。したがって、捕捉処理に係る負荷が大きくなるとともに、捕捉にかかる時間が長くなってしまう。
【0012】
また、上述の従来の一般的なGPS信号の捕捉方法では、図2に示すような問題を生じる可能性がある。図2は、捕捉対象のGPS信号の相関積算値が低く、他のGPS信号の相関積算値が高い場合の信号捕捉状態を示す概念図である。
【0013】
上述の従来の一般的なGPS信号の捕捉方法では、図2に示すように、所望のGPS信号が弱信号(受信時の信号レベルが低く相関値の低い信号)であれば、メインローブによる相関値が低いので、メインローブが直接検出される可能性がある。ここで、図2に示すように、強信号のクロスコリレーションが周波数範囲内に存在する場合を考える。
【0014】
この場合、メインローブによる相関積算値よりもクロスコリレーションによる相関積算値の方が高くなる。したがって、クロスコリレーションのメインローブの周波数およびコード位相を、所望のGPS信号の周波数およびコード位相として誤検出してしまい、誤った捕捉を行ってしまう。
【0015】
本発明の目的は、従来の方法よりも簡素な方法で素早く確実に、所望のGPS信号を捕捉できる信号捕捉方法を実現することにある。
【課題を解決するための手段】
【0016】
この発明は、所定周波数の搬送波を拡散コードでコード変調してなる通信信号を捕捉する信号捕捉方法に関する。この信号捕捉方法では、次の処理を実行する各工程を有する。
【0017】
(A)拡散コードのレプリカコードを有するレプリカ信号と前記通信信号の受信信号とを相関処理する。
【0018】
(B)相関処理の結果に基づいて、所望の通信信号を捕捉する暫定周波数を設定する。
【0019】
(C)暫定周波数での相関値から、異なる演算方法で複数の相関積算値を算出する。
【0020】
(D)複数の相関積算値と暫定周波数とから通信信号の周波数を設定する。
【0021】
この方法では、一般的な信号捕捉(サーチ)方法を用いて、通信信号の暫定周波数が決定された後に、これらの検証が、暫定周波数による相関積算値のみを用いて実行される。
【0022】
また、この発明の信号捕捉方法における相関処理を行う工程では、拡散コードのレプリカコードを有するレプリカ信号と通信信号の受信信号とを所定周波数間隔でそれぞれ相関処理する。この方法では、相関処理を行う具体的な方法について示している。
【0023】
また、この発明の信号捕捉方法における複数の相関積算値を算出する異なる演算方法は、相関値としてI相関値とQ相関値とを用い、次の二種類の積算方法を用いている。ノンコヒーレント積算は、I相関値とQ相関値とから相関値パワーを算出し、当該相関値パワーを所定期間に亘り積算する処理である。コヒーレント積算は、I相関値とQ相関値とをそれぞれ所定期間に亘り積算し、該積算値のパワーを算出する処理である。
【0024】
この方法では、上述の複数の相関積算値の具体的な算出方法について示しており、同じI相関値およびQ相関値を用いながら演算方法が異なる、コヒーレント積算とノンコヒーレント積算とを用いる場合を示している。
【0025】
また、この発明の信号捕捉方法では、コヒーレント積算値が第1閾値以上であり、該コヒーレント積算値を基準としたノンコヒーレント積算値の比が第2の閾値以上である場合に、暫定周波数に基づく所定周波数範囲内で周波数を変化させながら、レプリカ信号と受信信号とをそれぞれ相関処理する。そして、相関処理結果に基づいて、該所定周波数範囲内における最大の相関積算値となる周波数を、所望の通信信号の周波数に設定する。
【0026】
この方法では、上述のように、暫定コード位相および暫定周波数で捕捉した通信信号がサイドローブであった場合の判断基準を示している。強信号(振幅の高い通信信号)のサイドローブではノンコヒーレント積算値が高く、ノンコヒーレント積算値はコヒーレント積算値と比較して、所定強度以上低くなる。例えば、シミュレーションを行った結果では、コヒーレント積算値は、メインローブに隣接するサイドローブではメインローブに対して13dB程度低い値となる。一方、ノンコヒーレント積算値はサイロローブでもメインローブでも殆ど変化しない。
【0027】
したがって、ノンコヒーレント積算値が高く、ノンコヒーレント積算値がコヒーレント積算値と比較して所定強度以上高い場合には、暫定周波数として捕捉した周波数のタイミングは、所望とする(捕捉対象である)通信信号が強信号であって、当該通信信号のサイドローブによる相関結果に基づくものと判断できる。
【0028】
そして、このようにサイドローブを捕捉したとしても、通信信号が強信号であり、捕捉したサイドローブの近傍に、より相関積算値が高いメインローブが確実に存在するので、当該暫定周波数を中心周波数として周波数範囲を決定し、再捕捉処理を行っても、クロスコリレーションに影響されることなく、確実にメインローブを捕捉することができる。
【0029】
また、この発明の信号捕捉方法では、暫定周波数に基づく所定周波数範囲内で周波数間隔を、暫定周波数を設定する工程で用いる周波数間隔よりも小さくする。
【0030】
この方法では、暫定周波数でサイドローブを検出した場合であっても、メインローブをサーチする周波数間隔が狭くなり、メインローブの周波数を高精度に検出することができる。
【0031】
また、この発明の信号捕捉方法では、コヒーレント積算値とノンコヒーレント積算値との比が第2の閾値未満である場合に、暫定周波数を、所望の通信信号の周波数とする、信号捕捉方法。
【0032】
この方法では、上述のコヒーレント積算値とノンコヒーレント積算値とを用いた場合での判断基準を示している。通信信号の相関特性は、受信した通信信号の振幅が高くても低くても、積算時間が同じであればメインローブではノンコヒーレント積算値もコヒーレント積算値も同程度である。ただし、受信した通信信号の振幅が高ければ当然にこれらの積算値も高くなり、受信した通信信号の振幅が低ければ当然にこれらの積算値も低くなる。
【0033】
したがって、ノンコヒーレント積算値が高く、該ノンコヒーレント積算値とコヒーレント積算値とが略同じである場合、もしくは、ノンコヒーレント積算値とコヒーレント積算値とがともに低い場合には、暫定コード位相および暫定周波数として捕捉したコード位相および周波数のタイミングは、所望とする(捕捉対象である)通信信号のメインローブによる相関結果に基づくものと判断できる。
【0034】
また、この発明の通信信号受信方法では、上述の信号捕捉方法によって捕捉した通信信号を追尾する工程と、追尾した通信信号に含まれる情報を復調する工程と、を有する。
【0035】
この方法では、上述の信号捕捉方法を利用した信号受信方法について示している。上述の方法を用いることで、クロスコリレーションの影響等を受けることなく、確実に通信信号を捕捉できるので、通信信号に含まれる情報を確実に復調することができる。
【0036】
また、この発明のGNSS信号受信方法では、上述の通信信号受信方法を利用する。この場合、通信信号はGNSS信号であって、情報は航法メッセージである。そして、GNSS信号受信方法は、GNSS信号から疑似距離を算出する工程と、疑似距離と航法メッセージとを用いて測位演算を行う工程と、を有する。
【0037】
この方法では、上述の信号捕捉方法を含む通信信号受信方法を用いたGNSS信号受信方法について示している。上述の通信信号受信方法を用いていることで、GNSS信号を確実に捕捉・追尾し、航法メッセージおよび疑似距離を、正確に取得することができる。これにより、高精度な測位演算が可能となる。
【発明の効果】
【0038】
この発明によれば、簡素な方法で素早く確実に所望のGPS信号を捕捉することができる。特に、クロスコリレーションによる誤った捕捉を防ぐことができる。
【図面の簡単な説明】
【0039】
【図1】従来の一般的なGPS信号の捕捉方法を示すフローチャートである。
【図2】従来法による捕捉対象のGPS信号の相関積算値が低く、他のGPS信号の相関積算値が高い場合の信号捕捉状態を示す概念図である。
【図3】本発明の実施形態に係るGPS信号受信装置1の主要機能部を示すブロック図である。
【図4】ベースバンド処理部30の機能ブロック図である。
【図5】ベースバンド処理部30で実行されるGPS信号捕捉処理のフローチャートである。
【図6】強信号および弱信号のコヒーレント積算値Ciおよびノンコヒーレント積算値NCiの周波数特性を示す図である。
【図7】本発明の実施形態のGPS信号受信装置1を備えた移動端末100の主要構成を示すブロック図である。
【発明を実施するための形態】
【0040】
本発明の実施形態に係る信号捕捉方法、信号捕捉プログラムについて、図を参照して説明する。また、当該信号捕捉方法を機構的に実現するための信号捕捉装置についても説明する。なお、本実施形態では、信号捕捉方法としてGNSS信号(特にGPS信号)の捕捉方法を示すとともに、当該捕捉方法で捕捉したGNSS信号を追尾し、航法メッセージ等を復調して測位演算を行うGNSS信号受信方法について示す。
【0041】
図3は本実施形態に係るGPS信号受信装置1の主要機能部を示すブロック図である。図3に示すように、GPS信号受信装置1は、GPS受信アンテナ10、RF処理部20、ベースバンド処理部30、測位演算部40を備える。
【0042】
GPS受信アンテナ10は、GPS衛星(図示せず)で放送されるGPS信号を受信する。GPS信号は、所定の周波数(L1波の場合1575.42MHz)の搬送波に対して、航法メッセージが重畳され、さらに、所定の拡散コード(L1波の場合C/Aコード)によるコード変調が行われた信号である。GPS受信アンテナ10による受信信号は、RF処理部20へ出力する。この受信信号には、捕捉・追尾対象である所望のGPS衛星からのGPS信号を含み、他のGPS衛星からのGPS信号等を含む信号である。
【0043】
RF処理部20は、受信信号に対してダウンサンプリングを行うことで中間周波数信号(IF信号)を生成し、ベースバンド処理部30へ出力する。
【0044】
ベースバンド処理部30は、本願の信号捕捉装置に相当する機能部であり、詳細な構成及び処理については後述する。ベースバンド処理部30は、所望とするGPS信号の拡散コードを有するレプリカ信号とIF信号とを相関処理した結果に基づいて、所望とするGPS信号の捕捉・追尾処理を行う。ベースバンド処理部30は、航法メッセージの元となる追尾時の相関処理結果を測位演算部40へ出力する。ベースバンド処理部30は、追尾処理用のコード位相差に基づいて疑似距離を算出し、測位演算部40へ出力する。
【0045】
測位演算部40は、ベースバンド処理部30から得られる追尾時の相関処理結果に基づいて航法メッセージを復調する。測位演算部40は、復調した航法メッセージと、ベースバンド処理部30からの疑似距離を用いて測位演算を行い、自装置位置を算出する。
【0046】
次に、ベースバンド処理部30で実行される詳細なGPS信号捕捉処理について説明する。図4はベースバンド処理部30の機能ブロック図である。
【0047】
ベースバンド処理部30は、演算部300、コード生成部310、所定数の相関部320を備える。演算部300は、GPS信号の捕捉処理とともに、捕捉したGPS信号の追尾処理、および疑似距離算出処理を実行する。演算部300は、これらの処理を実行するための処理プログラムが記憶された記憶部と、これら処理プログラムを読み出し実行するCPU等の演算素子とを備える。
【0048】
コード生成部310は、演算部300から設定されたコード位相および周波数に基づいて、所定のコード位相および所定の周波数からなり、所望とするGPS信号の拡散コードを含むレプリカ信号を生成する。コード生成部310は、コード位相が異なる複数のレプリカ信号を各相関部320へ出力する。この際、コード生成部310は、レプリカ信号として複素信号における実数部であるI相レプリカ信号と虚数部であるQ相レプリカ信号とを組にして、各相関部320へ出力する。
【0049】
各相関部320は、I相レプリカ信号とIF信号とを相関処理してI相関値を出力するとともに、Q相レプリカ信号とIF信号とを相関処理してQ相関値を出力する。なお、相関部320の数は、同時に相関処理を行うコード位相数および周波数の数に基づいて決定される。例えば、1023chipを一単位とするC/Aコードに対して1chipのコード位相間隔で、コード全体を一周波数で同時に相関処理する場合、相関部320を1024個用意すればよい。
【0050】
このような構成のベースバンド処理部30は、信号の捕捉時に図5に示すような処理を実行する。図5はベースバンド処理部30で実行されるGPS信号捕捉処理のフローチャートである。
【0051】
まず、ベースバンド処理部30の相関部320は、所定コード位相間隔および所定周波数間隔のレプリカ信号とIF信号とを相関処理する(S101)。具体的には、例えば、1023chipのC/Aコードに対して1chip間隔でコード全体に亘り、且つ、1575.42MHzを基準周波数として8000Hzの周波数幅に対して1kHz間隔で、相関処理を行い、それぞれにI相関値およびQ相関値を算出する。
【0052】
このようなコード位相軸および周波数軸の二次元における相関処理を、上述のような同時に1コード分の各コード位相での相関処理が可能な構成で実行する。この場合、図示しないバッファメモリ等により一次記憶しておいたIF信号に対して、周波数を所定間隔で変化させることで可能になる。
【0053】
ベースバンド処理部30の演算部300は、各相関部320から出力された相関値を、暫定捕捉用の積算時間だけ、コヒーレント積算し、暫定捕捉用のコヒーレント積算値を算出する。具体的には、暫定捕捉用の積算時間は、例えば1msec.である。また、暫定捕捉用のコヒーレント積算値は、I相関値とQ相関値をそれぞれ暫定捕捉用の積算時間分(この場合、1msec.)、積算した後に、パワー算出する処理で得られる。そして、このパワー算出とは、I相関値の積算値の二乗とQ相関値の二乗とを加算し、加算値の平方根を算出する処理である。
【0054】
演算処理部300は、コード位相軸と周波数軸の二次元で得られた暫定捕捉用コヒーレント積算値を、コード位相軸方向および周波数軸方向に掃引しながら、順次、捕捉用閾値以上であるかどうかを判断する。ここで、具体的なコード位相軸方向および周波数軸方向の掃引方法としては、まず一周波数(例えば、最低周波数)において、コード位相軸方向に沿って、暫定捕捉用コヒーレント積算値と暫定捕捉用閾値とを比較していく。ここで、暫定捕捉用閾値以上の暫定捕捉用コヒーレント積算値が無ければ、周波数を変化させて(例えば周波数を、上記周波数間隔分だけ高く設定し)、同様の比較処理を行っていく。なお、暫定捕捉用閾値は、予め対象とするGPS信号の仕様や受信装置の受信感度等に応じて捕捉の実験及びシミュレーション等を行っておくことで、適宜設定されている。
【0055】
そして、演算部300は、最初に捕捉用閾値以上となる暫定捕捉用コヒーレント積算値を検出すると、当該暫定捕捉用コヒーレント積算値に対応するコード位相および周波数を、暫定コード位相および暫定周波数に設定する(S102)。
【0056】
演算部300は、暫定コード位相および暫定周波数での相関値を、暫定捕捉用の積算時間よりも長い検証用の積算時間分、順次取得し、検証用のコヒーレント積算値Ciおよびノンコヒーレント積算NCiを算出する(S103)。具体的には、検証用の積算時間は、例えば10msec.である。
【0057】
ここで、検証用のコヒーレント積算値Ciは、I相関値とQ相関値をそれぞれ暫定捕捉用の積算時間分(この場合、10msec.)、積算した後に、パワー算出することで得られる。そして、このパワー算出とは、I相関値の積算値の二乗とQ相関値の二乗とを加算し、加算値の平方根を算出する処理である。
【0058】
検証用のノンコヒーレント積算値NCiは、I相関値とQ相関値とからパワー算出を行い、パワーを検証用の積算時間分(この場合、10msec.)、積算する処理で得られる。したがって、ノンコヒーレント積算で算出するパワーは、コヒーレント積算と異なり、I相関値の二乗とQ相関値の二乗とを加算し、加算値の平方根を算出する処理となる。
【0059】
このように算出されるコヒーレント積算値Ciとノンコヒーレント積算値NCiは、図6に示すような周波数特性を有する。図6は強信号および弱信号のコヒーレント積算値Ciおよびノンコヒーレント積算値NCiの周波数特性を示す図であり、図6(A)が強信号の場合、図6(B)が弱信号の場合を示す。また、図6において、実線がコヒーレント積算値Ciの特性であり、破線がノンコヒーレント積算値NCiの特性である。ここで、強信号とは受信時の信号強度が高い信号であり、例えば受信環境が良好な場合に得られる信号である。また、弱信号とは受信時の信号強度が低い信号であり、例えば受信環境が比較的良くない場合に得られる信号である。
【0060】
図6(A)、(B)に示すように、メインローブに対するコヒーレント積算値Ciおよびノンコヒーレント積算値NCiは、信号の強弱に限らず、略一致した値となる。
【0061】
弱信号の場合には、図6(B)に示すように、これらコヒーレント積算値Ciおよびノンコヒーレント積算値NCiは共に低くなる。したがって、検証用のコヒーレント積算値Ciおよびノンコヒーレント積算値NCiが共に低ければ、暫定コード位相および暫定周波数は、弱信号である所望のGPS信号のメインローブから得られたものと判断できる。
【0062】
強信号の場合には、図6(A)に示すように、これらコヒーレント積算値Ciおよびノンコヒーレント積算値NCiは共に高くなる。したがって、検証用のコヒーレント積算値Ciおよびノンコヒーレント積算値NCiが共に高ければ、暫定コード位相および暫定周波数は、強信号である所望のGPS信号のメインローブから得られたものと判断できる。
【0063】
この特性を利用して、検証用閾値(第1閾値に相当する。)を設定し、コヒーレント積算値Ciおよびノンコヒーレント積算値NCiが共に検証用閾値よりも低ければ、所望のGPS信号は弱信号であるものの、暫定捕捉で所望のGPS信号を捕捉できたものする。そして、暫定コード位相および暫定周波数を、捕捉処理による正式なコード位相および周波数に設定する。なお、検証用閾値は、上述の暫定捕捉用閾値に基づいて、積算時間の差等を加味して設定されている。
【0064】
また、前記検証用閾値に対してコヒーレント積算値Ciが高く、コヒーレント積算値Ciとノンコヒーレント積算NCiとが略一致すれば(所定の比率内であれば)、所望のGPS信号は強信号であり、暫定捕捉で所望のGPS信号を捕捉できたものとする。そして、暫定コード位相および暫定周波数を、捕捉処理による正式なコード位相および周波数に設定する。
【0065】
ここで、強信号の場合に、コヒーレント積算値Ciとノンコヒーレント積算値NCiとが共に検証用閾値以上の場合に、単純にメインローブによる相関と判定しないのは、次の理由による。
【0066】
図6(A)に示すように、強信号の場合、メインローブに隣接する(本実施形態の捕捉処理では、±150Hz離間した位置の)サイドローブであっても、ノンコヒーレント積算値NCiとコヒーレント積算Ciとが高くなる。したがって、単に、ノンコヒーレント積算値NCiとコヒーレント積算Ciとが共に検証用閾値以上に設定すると、サイドローブの周波数を、捕捉の周波数に誤設定してしまうことになる。
【0067】
ここで、図6(A)に示すように、サイドローブの場合、ノンコヒーレント積算値NCiはメインローブ同様に高くなるが、コヒーレント積算値Ciは低くなる。具体的には、実験的に得られた結果では、50dBの強度を有するメインローブを有する強信号の場合、ノンコヒーレント積算値NCiに対して、コヒーレント積算値Ciが13dB程度低くなる。この特性を利用し、コヒーレント積算値Ciを基準としたノンコヒーレント積算値NCiの比を算出する。そして、この比がサイドローブ検出用の閾値(第2閾値に相当する。)以上であれば、暫定捕捉により、サイドローブを捕捉したもの判断する。なお、このサイドローブ検出用の閾値は、別処理により得られる信号強度に関連する値(例えばC/No等)から適宜設定すればよい。
【0068】
このような概念を利用し、演算部300は、コヒーレント積算値Ciが前記検出用閾値に相当する第1閾値よりも低ければ(S104:No)、暫定コード位相および暫定周波数を、捕捉の正式なコード位相および周波数に設定し、当該コード位相および周波数を初期値とする追尾処理へ移行する(S107)。
【0069】
演算部300は、コヒーレント積算値NCiが第1閾値以上であり(S104:Yes)、コヒーレント積算値Ciを基準としたノンコヒーレント積算値NCiの比(NCi/Ci)が第2閾値未満であれば(S105:No)、暫定コード位相および暫定周波数を、捕捉の正式なコード位相および周波数に設定し、当該コード位相および周波数を初期値とする追尾処理へ移行する(S107)。ここで、第2閾値は、例えば3〜4程度に設定すればよい。言い換えれば、コヒーレント積算値Ciに対してノンコヒーレント積算値NCiが3倍〜4倍未満であることを目安とすればよい。なお、ここでは、比を用いているが、コヒーレント積算値Ciとノンコヒーレント積算値NCiとの差分値を用いてもよい。
【0070】
このような処理を行うことで、所望のGPS信号のメインローブを暫定捕捉で直接捕捉した場合に、当該所望とするGPS信号の捕捉周波数および捕捉コード位相を確実に取得することができる。特に弱信号の場合、従来技術に示すようなクロスコリレーションを誤って捕捉することを防止できる。
【0071】
なお、本実施形態の説明では、S104の処理後にS105の処理を実行する例を示したが、S105の処理後にS104の処理を実行してもよい。
【0072】
演算部300は、コヒーレント積算値NCiが第1閾値以上であり(S104:Yes)、コヒーレント積算値Ciを基準としたノンコヒーレント積算値NCiの比(NCi/Ci)が第2閾値以上であれば(S105:Yes)、暫定コード位相を固定し、コード位相を固定した状態で、暫定周波数を中心周波数として、再捕捉用の周波数範囲を設定する。例えば、具体的には、この再捕捉用の周波数範囲を±500Hzに設定し、50Hzの周波数間隔に設定する。このように周波数範囲を広げて再捕捉を行っても、ノンコヒーレント積算値NCiが高いので、所望のGPS信号は強信号であり、クロスコリレーションの影響を受けないので問題とはならない。また、周波数間隔を小さくすることで、より高精度に周波数を捕捉することが可能になる。
【0073】
演算部300は、当該周波数範囲において、従来技術に示したように、所定の周波数間隔で相関処理を行い、コヒーレント積算値を算出する。そして、演算部300は、コヒーレント積算値が最大値となる周波数を、捕捉の周波数に設定する(S106)。このような処理を行うことで、所望のGPS信号が強信号であり、サイドローブを暫定捕捉しても、確実にメインローブを捕捉しなおすことができる。演算部300は、このように再取得した周波数と固定したコード位相を初期値として、追尾処理へ移行する(S107)。
【0074】
以上のように、本実施形態の構成及び処理を用いることで、信号強度やクロスコリレーションの影響を受けることなく、所望のGPS信号を正確且つ確実に捕捉することができる。この際、従来のような煩雑な処理を行うことなく、所望のGPS信号を捕捉できるので、簡素且つ高速な捕捉処理が可能になる。
【0075】
また、このように所望のGPS信号を正確に捕捉することで、追尾処理を、より正確且つ高速に行うことができる。そして、追尾処理が正確になることで、高精度な疑似距離が得られるとともに、航法メッセージを正確且つ確実に復調することができる。この結果、測位演算を高精度に行うことができる。
【0076】
なお、上述の説明では、GNSS信号の捕捉、受信方法を例に説明したが、拡散コードによりコード変調された通信信号を捕捉して利用する装置や分野であれば、当該発明の構成及び方法、プログラムを適用し、同様の作用効果を得ることができる。
【0077】
また、上述の説明では、コヒーレント積算値Ciの積算時間とノンコヒーレント積算値NCiの積算時間を同じに設定したが、異ならせてもよい。この場合、積算時間の差もしくは比に応じて、第2閾値を適宜設定すればよい。
【0078】
また、上述の説明では、捕捉用の全てのコード位相を一括で出力して周波数を順次変化させる方法を用いたが、捕捉用の全ての周波数を一括で出力してコード位相を順次変化させる方法を用いることも可能である。
【0079】
そして、このようなGPS信号受信装置1やGPS信号受信機能は、図7に示すような移動端末100に利用される。図7は、本実施形態のGPS信号受信装置1を備えた移動端末100の主要構成を示すブロック図である。
【0080】
図7に示すような移動端末100は、例えば携帯電話機、カーナビゲーション装置、PND、カメラ、時計等であり、アンテナ10、RF処理部20、ベースバンド処理部30、測位演算部40、アプリケーション処理部130を備える。アンテナ10、RF処理部20、ベースバンド処理部30、測位演算部40は、上述の構成のものであり、これらにより上述のようにGPS信号受信装置1が構成されている。
【0081】
アプリケーション処理部130は、GPS信号受信装置1から出力された測位結果に基づいて、自装置位置や自装置速度を表示したり、ナビゲーション等に利用するための処理を実行する。
【0082】
このような構成において、上述の高精度な測位結果を得られることで、高精度な位置表示やナビゲーション等を実現することができる。
【符号の説明】
【0083】
1:GPS信号受信装置、10:GPS受信アンテナ、20:RF処理部、30:ベースバンド処理部、40:測位演算部、300:演算部、310:コード生成部、320:相関部、
100:移動端末、130:アプリケーション処理部
【特許請求の範囲】
【請求項1】
所定周波数の搬送波を拡散コードでコード変調してなる通信信号を捕捉する信号捕捉方法であって、
前記拡散コードのレプリカコードを有するレプリカ信号と前記通信信号の受信信号とを相関処理する工程と、
前記相関処理の結果に基づいて、所望の通信信号を捕捉する暫定周波数を設定する工程と、
前記暫定周波数での相関値から、複数の相関積算値をそれぞれ異なる演算方法で算出する工程と、
前記複数の相関積算値と前記暫定周波数とから前記通信信号の周波数を設定する工程と、
を有する信号捕捉方法。
【請求項2】
請求項1に記載の信号捕捉方法であって、
前記相関処理する工程は、前記拡散コードのレプリカコードを有するレプリカ信号と前記通信信号の受信信号とを所定周波数間隔でそれぞれ相関処理する、信号捕捉方法。
【請求項3】
請求項1または請求項2に記載の信号捕捉方法であって、
前記複数の相関積算値を算出する異なる演算方法は、
前記相関値としてI相関値とQ相関値とを取得し、I相関値とQ相関値とから相関値パワーを算出し、当該相関値パワーを所定期間に亘り積算してなるノンコヒーレント積算と、
前記相関値としてI相関値とQ相関値とを取得し、該I相関値とQ相関値とをそれぞれ所定期間に亘り積算し、該積算値のパワーを算出してなるコヒーレント積算と、からなる、信号捕捉方法。
【請求項4】
請求項3に記載の信号捕捉方法であって、
前記コヒーレント積算値が第1閾値以上であり、該コヒーレント積算値を基準とした前記ノンコヒーレント積算値の比が第2の閾値以上である場合に、
前記暫定周波数に基づく所定周波数範囲内で周波数を変化させながら、前記レプリカ信号と前記受信信号とをそれぞれ相関処理し、
相関処理結果に基づいて、該所定周波数範囲内における最大の相関積算値となる周波数を、前記所望の通信信号の周波数に設定する、信号捕捉方法。
【請求項5】
請求項4に記載の信号捕捉方法であって、
前記暫定周波数に基づく所定周波数範囲内で周波数間隔を、前記暫定周波数を設定する工程で用いる周波数間隔よりも小さくする、信号捕捉方法。
【請求項6】
請求項4または請求項5に記載の信号捕捉方法であって、
前記コヒーレント積算値と前記ノンコヒーレント積算値との比が前記第2の閾値未満である場合に、
前記暫定周波数を、前記所望の通信信号の周波数とする、信号捕捉方法。
【請求項7】
請求項1乃至請求項6のいずれかに記載の信号捕捉方法によって捕捉した通信信号を追尾する工程と、
追尾した通信信号に含まれる情報を復調する工程と、を有する通信信号受信方法。
【請求項8】
請求項7に記載の通信信号受信方法を利用し、
前記通信信号はGNSS信号であって、前記情報は航法メッセージであり、
前記GNSS信号から疑似距離を算出する工程と、
前記疑似距離と前記航法メッセージとを用いて、測位演算を行う工程と、を有するGNSS信号受信方法。
【請求項9】
所定周波数の搬送波を拡散コードでコード変調してなる通信信号を捕捉する処理をコンピュータに実行させるための信号捕捉プログラムであって、
前記拡散コードのレプリカコードを有するレプリカ信号と前記通信信号の受信信号とを相関処理する処理と、
前記相関処理の結果に基づいて、所望の通信信号を捕捉する暫定周波数を設定する処理と、
前記暫定周波数での相関値から、複数の相関積算値をそれぞれ異なる演算方法で算出する処理と、
前記複数の相関積算値と前記暫定周波数とから前記通信信号の周波数を設定する処理と、
を有する信号捕捉プログラム。
【請求項10】
請求項9に記載の信号捕捉プログラムであって、
前記相関処理する処理では、前記拡散コードのレプリカコードを有するレプリカ信号と前記通信信号の受信信号とを所定周波数間隔でそれぞれ相関処理する、信号捕捉プログラム。
【請求項11】
請求項9または請求項10に記載の信号捕捉プログラムであって、
前記複数の相関積算値を算出する異なる演算処理は、
前記相関値としてI相関値とQ相関値とを取得し、I相関値とQ相関値とから相関値パワーを算出し、当該相関値パワーを所定期間に亘り積算してなるノンコヒーレント積算処理と、
前記相関値としてI相関値とQ相関値とを取得し、該I相関値とQ相関値とをそれぞれ所定期間に亘り積算し、該積算値のパワーを算出してなるコヒーレント積算処理と、からなる、信号捕捉プログラム。
【請求項12】
請求項8乃至請求項10のいずれかに記載の信号捕捉プログラムの各処理を含み、
捕捉した通信信号を追尾する処理と、
追尾した通信信号に含まれる情報を復調する処理と、を有する通信信号受信プログラム。
【請求項13】
請求項12に記載の通信信号受信プログラムの各処理を含み、
前記通信信号としてGNSS信号が設定され、前記情報として航法メッセージが設定され、
前記GNSS信号から疑似距離を算出する処理と、
前記疑似距離と前記航法メッセージとを用いて、測位演算を行う処理と、を有するGNSS信号受信プログラム。
【請求項14】
所定周波数の搬送波を拡散コードでコード変調してなる通信信号を捕捉する信号捕捉装置であって、
前記拡散コードのレプリカコードを有するレプリカ信号と前記通信信号の受信信号とを相関処理する相関部と、
前記相関処理の結果に基づいて、所望の通信信号を捕捉する暫定周波数を設定し、前記暫定周波数での相関値から複数の相関積算値をそれぞれ異なる演算方法で算出するとともに、前記複数の相関積算値と前記暫定周波数とから前記通信信号の周波数を設定する演算部と、
を備えた信号捕捉装置。
【請求項15】
請求項14に記載の信号捕捉装置であって、
前記相関部は、前記拡散コードのレプリカコードを有するレプリカ信号と前記通信信号の受信信号とを所定周波数間隔でそれぞれ相関処理する、信号捕捉装置。
【請求項16】
請求項14または請求項15に記載の信号捕捉装置であって、
前記演算部は、前記複数の相関積算値を、前記相関値としてI相関値とQ相関値とを取得し、I相関値とQ相関値とから相関値パワーを算出し、当該相関値パワーを所定期間に亘り積算してなるノンコヒーレント積算と、前記相関値としてI相関値とQ相関値とを取得し、該I相関値とQ相関値とをそれぞれ所定期間に亘り積算し、該積算値のパワーを算出してなるコヒーレント積算と、から算出する、信号捕捉装置。
【請求項17】
請求項14乃至請求項16のいずれかに記載の信号捕捉装置を備え、
前記演算部は、捕捉した通信信号を追尾し、該追尾した通信信号に含まれる情報を復調する、通信信号受信装置。
【請求項18】
請求項17に記載の通信信号受信装置を備え、
前記通信信号として航法メッセージを含むGNSS信号を受信し、
前記演算部は、前記GNSS信号の追尾結果から疑似距離を算出し、
該疑似距離と前記航法メッセージとを用いて、測位演算を行う測位演算部を備えた、GNSS信号受信装置。
【請求項19】
請求項18に記載のGNSS信号受信装置と、
前記測位演算部の測位演算結果を用いて所定のアプリケーションを実行するアプリケーション処理部と、を備える移動端末。
【請求項1】
所定周波数の搬送波を拡散コードでコード変調してなる通信信号を捕捉する信号捕捉方法であって、
前記拡散コードのレプリカコードを有するレプリカ信号と前記通信信号の受信信号とを相関処理する工程と、
前記相関処理の結果に基づいて、所望の通信信号を捕捉する暫定周波数を設定する工程と、
前記暫定周波数での相関値から、複数の相関積算値をそれぞれ異なる演算方法で算出する工程と、
前記複数の相関積算値と前記暫定周波数とから前記通信信号の周波数を設定する工程と、
を有する信号捕捉方法。
【請求項2】
請求項1に記載の信号捕捉方法であって、
前記相関処理する工程は、前記拡散コードのレプリカコードを有するレプリカ信号と前記通信信号の受信信号とを所定周波数間隔でそれぞれ相関処理する、信号捕捉方法。
【請求項3】
請求項1または請求項2に記載の信号捕捉方法であって、
前記複数の相関積算値を算出する異なる演算方法は、
前記相関値としてI相関値とQ相関値とを取得し、I相関値とQ相関値とから相関値パワーを算出し、当該相関値パワーを所定期間に亘り積算してなるノンコヒーレント積算と、
前記相関値としてI相関値とQ相関値とを取得し、該I相関値とQ相関値とをそれぞれ所定期間に亘り積算し、該積算値のパワーを算出してなるコヒーレント積算と、からなる、信号捕捉方法。
【請求項4】
請求項3に記載の信号捕捉方法であって、
前記コヒーレント積算値が第1閾値以上であり、該コヒーレント積算値を基準とした前記ノンコヒーレント積算値の比が第2の閾値以上である場合に、
前記暫定周波数に基づく所定周波数範囲内で周波数を変化させながら、前記レプリカ信号と前記受信信号とをそれぞれ相関処理し、
相関処理結果に基づいて、該所定周波数範囲内における最大の相関積算値となる周波数を、前記所望の通信信号の周波数に設定する、信号捕捉方法。
【請求項5】
請求項4に記載の信号捕捉方法であって、
前記暫定周波数に基づく所定周波数範囲内で周波数間隔を、前記暫定周波数を設定する工程で用いる周波数間隔よりも小さくする、信号捕捉方法。
【請求項6】
請求項4または請求項5に記載の信号捕捉方法であって、
前記コヒーレント積算値と前記ノンコヒーレント積算値との比が前記第2の閾値未満である場合に、
前記暫定周波数を、前記所望の通信信号の周波数とする、信号捕捉方法。
【請求項7】
請求項1乃至請求項6のいずれかに記載の信号捕捉方法によって捕捉した通信信号を追尾する工程と、
追尾した通信信号に含まれる情報を復調する工程と、を有する通信信号受信方法。
【請求項8】
請求項7に記載の通信信号受信方法を利用し、
前記通信信号はGNSS信号であって、前記情報は航法メッセージであり、
前記GNSS信号から疑似距離を算出する工程と、
前記疑似距離と前記航法メッセージとを用いて、測位演算を行う工程と、を有するGNSS信号受信方法。
【請求項9】
所定周波数の搬送波を拡散コードでコード変調してなる通信信号を捕捉する処理をコンピュータに実行させるための信号捕捉プログラムであって、
前記拡散コードのレプリカコードを有するレプリカ信号と前記通信信号の受信信号とを相関処理する処理と、
前記相関処理の結果に基づいて、所望の通信信号を捕捉する暫定周波数を設定する処理と、
前記暫定周波数での相関値から、複数の相関積算値をそれぞれ異なる演算方法で算出する処理と、
前記複数の相関積算値と前記暫定周波数とから前記通信信号の周波数を設定する処理と、
を有する信号捕捉プログラム。
【請求項10】
請求項9に記載の信号捕捉プログラムであって、
前記相関処理する処理では、前記拡散コードのレプリカコードを有するレプリカ信号と前記通信信号の受信信号とを所定周波数間隔でそれぞれ相関処理する、信号捕捉プログラム。
【請求項11】
請求項9または請求項10に記載の信号捕捉プログラムであって、
前記複数の相関積算値を算出する異なる演算処理は、
前記相関値としてI相関値とQ相関値とを取得し、I相関値とQ相関値とから相関値パワーを算出し、当該相関値パワーを所定期間に亘り積算してなるノンコヒーレント積算処理と、
前記相関値としてI相関値とQ相関値とを取得し、該I相関値とQ相関値とをそれぞれ所定期間に亘り積算し、該積算値のパワーを算出してなるコヒーレント積算処理と、からなる、信号捕捉プログラム。
【請求項12】
請求項8乃至請求項10のいずれかに記載の信号捕捉プログラムの各処理を含み、
捕捉した通信信号を追尾する処理と、
追尾した通信信号に含まれる情報を復調する処理と、を有する通信信号受信プログラム。
【請求項13】
請求項12に記載の通信信号受信プログラムの各処理を含み、
前記通信信号としてGNSS信号が設定され、前記情報として航法メッセージが設定され、
前記GNSS信号から疑似距離を算出する処理と、
前記疑似距離と前記航法メッセージとを用いて、測位演算を行う処理と、を有するGNSS信号受信プログラム。
【請求項14】
所定周波数の搬送波を拡散コードでコード変調してなる通信信号を捕捉する信号捕捉装置であって、
前記拡散コードのレプリカコードを有するレプリカ信号と前記通信信号の受信信号とを相関処理する相関部と、
前記相関処理の結果に基づいて、所望の通信信号を捕捉する暫定周波数を設定し、前記暫定周波数での相関値から複数の相関積算値をそれぞれ異なる演算方法で算出するとともに、前記複数の相関積算値と前記暫定周波数とから前記通信信号の周波数を設定する演算部と、
を備えた信号捕捉装置。
【請求項15】
請求項14に記載の信号捕捉装置であって、
前記相関部は、前記拡散コードのレプリカコードを有するレプリカ信号と前記通信信号の受信信号とを所定周波数間隔でそれぞれ相関処理する、信号捕捉装置。
【請求項16】
請求項14または請求項15に記載の信号捕捉装置であって、
前記演算部は、前記複数の相関積算値を、前記相関値としてI相関値とQ相関値とを取得し、I相関値とQ相関値とから相関値パワーを算出し、当該相関値パワーを所定期間に亘り積算してなるノンコヒーレント積算と、前記相関値としてI相関値とQ相関値とを取得し、該I相関値とQ相関値とをそれぞれ所定期間に亘り積算し、該積算値のパワーを算出してなるコヒーレント積算と、から算出する、信号捕捉装置。
【請求項17】
請求項14乃至請求項16のいずれかに記載の信号捕捉装置を備え、
前記演算部は、捕捉した通信信号を追尾し、該追尾した通信信号に含まれる情報を復調する、通信信号受信装置。
【請求項18】
請求項17に記載の通信信号受信装置を備え、
前記通信信号として航法メッセージを含むGNSS信号を受信し、
前記演算部は、前記GNSS信号の追尾結果から疑似距離を算出し、
該疑似距離と前記航法メッセージとを用いて、測位演算を行う測位演算部を備えた、GNSS信号受信装置。
【請求項19】
請求項18に記載のGNSS信号受信装置と、
前記測位演算部の測位演算結果を用いて所定のアプリケーションを実行するアプリケーション処理部と、を備える移動端末。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−53972(P2013−53972A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2011−193460(P2011−193460)
【出願日】平成23年9月6日(2011.9.6)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成23年9月6日(2011.9.6)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
[ Back to top ]