
信号捕捉補助データを取得するためのシステム及び方法
【課題】信号捕捉補助データを取得するためのシステム及び方法。
【解決手段】信号捕捉補助データは、衛星本体及び基地局のような、任意のソースからの信号を検索する無線所在地補助された位置決定装置のような受信する装置に対して取得される。データは、有効性を危うくすることがある時間及び位置のようなパラメータの変化の評価に基づいて、以前に捕捉されたデータから取得されることができる。ある場合には、データは、パラメータの変化に対して調節されることができる。特に遠隔エンティティにより提供された捕捉補助データが一般的に提供されてきたものよりもより明確なパラメータを含むのであれば、より正確にされたデータは、信号セットの部分的な測定値を使用して受信機により計算されることができる。補正できない移動局の動きが検出され、以前のデータの有効性が危うくされない限り、新たなデータは、ドップラー係数を使用した時間の外挿の限界のために以前のデータの有効性が消失するまで取得される必要がない。
【解決手段】信号捕捉補助データは、衛星本体及び基地局のような、任意のソースからの信号を検索する無線所在地補助された位置決定装置のような受信する装置に対して取得される。データは、有効性を危うくすることがある時間及び位置のようなパラメータの変化の評価に基づいて、以前に捕捉されたデータから取得されることができる。ある場合には、データは、パラメータの変化に対して調節されることができる。特に遠隔エンティティにより提供された捕捉補助データが一般的に提供されてきたものよりもより明確なパラメータを含むのであれば、より正確にされたデータは、信号セットの部分的な測定値を使用して受信機により計算されることができる。補正できない移動局の動きが検出され、以前のデータの有効性が危うくされない限り、新たなデータは、ドップラー係数を使用した時間の外挿の限界のために以前のデータの有効性が消失するまで取得される必要がない。
【発明の詳細な説明】
【技術分野】
【0001】
本出願は、2003年4月25日に出願した米国仮特許出願第60/465,371号、及び2003年4月30日に出願した米国仮特許出願第60/467,258号に優先権を主張し、これらは、本明細書中に引用文献として取り込まれている。
【0002】
開示された方法及び装置は、ワイアレス通信に係り、より具体的には、選択された信号を捕捉する際に受信局を補助するために信号捕捉補助データを使用するワイアレス・システムに関する。
【背景技術】
【0003】
ワイアレス通信工業は、ワイアレス端末に関する正確な所在地情報を発生させるサービスを開発している。この開発は、非常呼び出しに迅速に対応するための公共安全性サービス・プロバイダの努力の成果における彼らの必要性により一部が動機づけられる。多くの例では、呼び出しをする相手方は、正確な所在地情報を提供することを望まない又は提供できないことがある。そのような情報が自動的に提供される場合に、公共安全係職員は、迅速に応答でき、サービスを実行できる。一般に、その場所において公共安全性構成員が緊急‘911’電話呼び出しを受け取る場所は、公共安全性応答点(Public Safety Answering Point)(以降‘PSAP’と表す)として知られる。
【0004】
周知の全地球位置決定システム(Global Positioning System)(GPS)は、ワイアレス端末所在地決定を提供するための1つの可能性のある取り組み方を提供する。GPS技術を使用して、ワイアレス端末の所在地情報及び速度情報は、FCC報告及び命令により必要とされる精度要求の範囲内で決定されることができる。十分に正確なワイアレス端末所在地情報を提供することに加えて、一旦GPS技術がユニットに追加されると、新たなGPSの特徴は、ワイアレス電話機に容易に統合される。追加価値の特徴は、ワイアレス電話機の市場価値を増加させるために、及びそのような電話機のエンド・ユーザに追加のサービスの提供を通して収入を高めるために使用されることが可能である。
【0005】
良く知られているように、GPSナビゲーション・システムは、地球の周りの軌道上を回っている複数の衛星を使用する。GPSのいかなるユーザも、地球上のどこでも、3次元所在地、速度及び1日の時間を含む正確なナビゲーション情報を導き出せる。GSPシステムは、24個の衛星を含み、衛星は、赤道に対して55°傾斜した3つの平面で26,600キロメートルの半径を有する円形の軌道に、互いに120°の間隔で配置される。8個の衛星は、3つの軌道経路の各々の中で等間隔に配置される。GPSを使用する所在地測定は、軌道を回っている衛星からGPS受信機へGPS信号同報通信の伝播遅延時間の測定に基づく。通常、4個の衛星からの信号の受信が、4次元(緯度、経度、高さ、及び時間)の正確な所在地決定のために要求される。受信機がそれぞれの信号伝播遅延を測定した後で、各衛星への距離は、各遅延を光の速度で掛け算することにより計算される。位置及び時間は、測定された距離に取り込まれている4個の未知数と既知の衛星の位置を有する4つの方程式の組を解くことにより見出される。GSPシステムの正確な能力は、衛星の時計及び軌道パラメータを連続的にモニタし補正する追跡局(tracking station)とともに、各衛星に対して搭載されている原子時計を使用して維持される。
【0006】
各GPS衛星本体(satellite vehicle)(SV)は、L−バンドの2つの直接系列符号化されたスペクトル拡散信号:1.57542GHzのキャリア周波数のL1信号、及び1.2276GHzのL2信号、を送信する。L1信号は、位相矩象(phase quadrature)中に変調された2つの位相シフト・キーされた(phase-shift keyed)(PSK)スペクトル拡散信号:P−符号信号(Pは“正確さ”の代わりである)及びC/A−符号信号(C/Aは“粗い/捕捉”の代わりである)からなる。L2信号は、P−符号信号のみを含有する。P符号及びC/A符号は、キャリア上に変調されるビット(電気通信業者により“チップ”と呼ばれる)のそれぞれの擬似ランダム(擬似ノイズ又は“PN”とも呼ばれる)系列である。これらの符号の時計に類似の性質は、時間遅延測定を行う際に受信機によって利用される。各SVに関するPN符号は、固有であり、複数のPN符号が同じキャリア周波数において全て送信されたとしても、どの衛星が与えられた符号を送信したかを受信機が識別することを可能にする。ナビゲーション計算に有用なシステム状態情報及び衛星軌道パラメータを包含する50ビット/秒のデータ・ストリームも、各キャリア上に変調される。P−符号信号は、暗号化され、そして一般に商業的なユーザ及び私的なユーザに対して利用可能ではない。C/A信号は、全てのユーザに利用可能である。
【0007】
GPS受信機によって実行される動作は、大部分が、直接系列スペクトル拡散受信機によって実行されるものの典型例である。PNコード変調の拡散効果は、“逆拡散”として知られる処理において、時間を合わせられ(time-aligned)、ローカルに発生された符号のコピーと各信号とを掛け算するとことにより各信号から除去されなければならない。適切な時間の合わせ、すなわち符号遅延、は、受信機の始動時に知られていない可能性があるので、符号遅延は、GPS受信機動作の初期の“捕捉”フェーズの間に検索することにより決定される必要がある。
【0008】
逆拡散が実行された後で、各信号は、中間キャリア周波数で50ビット/秒のPSK信号から構成される。このPSK信号の正確な周波数は、衛星と端末ユニットとの間の相対的な動きによって生ずるドップラー効果に起因し、そしてローカル受信機のGPS時計基準時間の誤差に起因して不確定である。ドップラー周波数が通常は信号捕捉の前に未知であるために、ドップラー周波数の検索は、初期の信号捕捉の間に実行される必要がある。一旦、ドップラー周波数がほぼ決定されると、キャリア復調が行える。
【0009】
キャリア復調を実行した後で、データ・ビット・タイミングは、ビット同期化ループを使用して導出され、データ・ストリームが、最終的に検出される。一旦、4個の衛星からの信号が捕捉されかつ固定され、時間遅延及びドップラー測定値が得られると、そして(GPSタイミング基準及び軌道パラメータを決定するために十分である)十分な数のデータ・ビットが受信されると、ナビゲーション計算は、着手されることができる。
【0010】
位置決定に関するGSPシステムの1つの欠点は、信号捕捉を実行するために比較的長時間を必要とすることである。上記されたように、SV信号は、2次元検索“空間”、この次元は符号位相遅延及びドップラー周波数シフトである、において検索することによりSV信号が最初に位置決めされるまで追跡されることはできない。一般的に、もし、この検索空間の中で信号の位置の事前の知識がなければ、受信機“コールド・スタート(cold start)”の後の場合であるかのように、非常に多数の符号遅延(約2000)及びドップラー周波数(約15)が、捕捉され追跡されようとしている各SV信号に対して検索される必要がある。それゆえ、各信号に対して、検索空間において30,000個の位置まで検査される必要がある。一般的に、これらの位置は、1回に1個、連続的に検査され、処理は、5分から10分の長さかかることがある。受信しているアンテナの視野内で4個の衛星の身元(すなわち、PN符号)が未知であるならば、捕捉時間は、さらに長くなる。
【0011】
信号捕捉は、GPS受信機が信号を見失った場合に、少なくとも必要である、これは、例えば、電源を切った後で生じることがある、又は信号がある時間の期間にわたり阻止されている場合に生じることがある。信号を捕捉した後で、これらは維持される又は“追跡される”。
【0012】
しかしながら、セルラ電話機移動局(MS)のような多くの装置は、装置の基本的な目的というよりは追加の特徴又は拡張としてGPS機能性を所有する。これらの装置にとって、GPS SV信号を継続的に追跡することの必要性は、コストを増加させるはずであり、電池の寿命を減少させる、又は本来の装置の機能性(例えば、セルラ電話機として基本的に機能すること)を低減する。例えば、GPS SV信号がセルラ電話機の信号周波数とは異なる周波数で与えられるために、1個の受信機は、両方の周波数を同時にモニタできない。これを実行するために、MSは、増設の受信機ユニットを必要とするはずであり、それによって、装置のコストに追加される。さらに、システムの処理能力は、両方の信号を同時にモニタするために増加させられる必要があるはずであり、これはコストと電力消費の両方を増加させるはずである。したがって、多くのそのようなシステムは、ほとんどGPS SV信号を追跡せずに、むしろ要求に応じて必要とされる信号だけを捕捉する。
【0013】
全てのGPS能力があるシステムは、GPS SV信号の捕捉を必要とする。あるシステムは、そのような捕捉を時々必要とするだけであるが、その他のシステムは、GPS機能を要求される各回毎にGPS SV信号の捕捉を必要とする。不幸にして、信号捕捉に関する必要性は、GPS機能が緊急に必要とされることを妨げない、例えば、MSの位置が緊急事態への対応を容易にするために急いで必要とされる場合である。そのような状況では、所在地決定が取得される前に、GPS/ワイアレス端末ユニットによる5分から10分のGPS衛星信号捕捉のコールド・スタートに付随する時間遅延は、非常に好ましくない。
【0014】
この遅延を削減するために、情報は、特定の信号を捕捉する際に受信機を助けるために提供されることができる。そのような捕捉補助情報は、“符号ウィンドウ(code window)”を与えることにより、信号の位置を決定するために検索される必要がある空間を受信機が狭くすることを可能にする。符号ウィンドウは、その中で“符号位相(code phase)”(実効的に、信号到着の時間)が見出されるはずの縮小された範囲、又は信号に関係するドップラー・シフトの予測される範囲を与える。捕捉補助は、しかも、自身のPN(擬似ノイズ又は擬似ランダム)符号、周波数、変調、及び内容のような、信号に関するその他の情報も含むことができる。信号の不確定性についていのウィンドウがより狭いことは、受信機がより迅速に信号を捕捉できることである。これらのウィンドウを狭くすることは、信号のより早い捕捉を可能にする、これは位置決定が生成されることができる前の遅延を短くするだけでなく、受信機の処理負荷を削減し、これは電力消費を削減できる。システム内部の他の1つのソースから提供される情報の補助で、その中で受信機が要求によって所在地位置決定のための照準信号(raging signal)(例えば、SV GPS信号)の位置を決めるシステムは、一般に“無線補助の所在地位置決定(wireless assisted position location)”システムとして呼ばれる。
【0015】
それらの導入以来、無線補助の所在地位置決定システムは、好ましい所在地位置決定技術として人気を得てきている。これらは、与えられた信号ソースから照準信号を測定することが可能なユーザ端末が、照準信号の迅速な捕捉を容易にする情報を取得するためにデータ・ベースをアクセスできる任意のシステムに適用可能である。他のものの間で、アプリケーションの1つは、1若しくはそれより多くの基地局(base station)(BS)と通信する所在地位置決定能力があるワイアレス移動局(mobile station)(MS)による使用であり、ここで、BSは、信号捕捉補助データを提供できる1若しくはそれより多くのデータ・ベース・サーバ、これは所在地決定エンティティ(Position Determination Entity)(PDE)とも呼ばれる、に接続される。
【0016】
MSに送信された信号捕捉補助情報は、MSに対して利用可能な照準信号のタイプの説明及びこれらの信号の特徴付け、例えば、周波数、PNオフセット、期待される符号位相、等、を含む。これらのパラメータのあるものの決定は、MSの位置及び内部状態のおおよその知識に基づく。そのような捕捉補助情報のゴールは、MSが特定のSV信号の到着の時間、又は符号位相、及び適用可能であるならばSV信号のドップラー・シフト、これは一般に符号位相予測として呼ばれることができる、を予測することを可能にする。考えは、発生、伝達、及び符号位相予測情報の使用を含む。
【0017】
符号位相予測は、その計算のために入力されたパラメータと同程度の精度であるだけである。望まれている特定の信号のソースに対して相対的なMSのクロック・オフセット、所在地及び動きは、一般に正確に知られないため、予測された符号位相は、ある種の不確定性を有する。この不確定性は、予測された符号位相のまわりの不確定性ウィンドウ及び信号の予測されたドップラー・シフトのまわりの不確定性ウィンドウとして表されることができる。
【0018】
無線補助の所在地位置決定システムは、例えば、GPS機能が要求される場合に、捕捉補助情報を受信することの自身の必要性に起因する待ち時間の欠点の影響を受ける。待ち時間は、必要な信号を捕捉するために必要とされる時間だけでなく、そのエンティティに対する捕捉補助を収集し提供すること及び受信されようとしている捕捉補助のために、一般に電気通信システム内部の他の1つのエンティティから、捕捉補助情報を要求するために必要とされる時間にも起因する。その上、捕捉補助情報を伝達することは、通信システム搬送能力に負荷を与える。
【0019】
それゆえ、捕捉補助を使用して正確な符号位相予測を可能にする一方で、無線補助の所在地位置決定システム中で受信機に負荷を与える処理及び通信を削減するシステム及び方法に対するニーズがある。
【特許文献1】米国特許第6,429,815号明細書
【特許文献2】米国特許第6,353,412号明細書
【発明の概要】
【0020】
[サマリー]
本明細書中に開示されたシステム及び方法は、ユーザ端末へ捕捉補助情報を伝達するための特徴、並びにネットワーク・インフラストラクチャにおいて及びユーザ端末において捕捉補助パラメータを決定するための特徴を含む。記載されたシステム及び方法の種々の態様は、捕捉補助を使用して正確な符号位相予測を可能にする一方で、無線補助の所在地位置決定システム中で受信機に負荷を与える処理及び通信を削減するための上記に認識されたニーズに向けられる。当業者は、記述されたシステム及び方法の種々の態様がその他の利点も提供することを理解するであろう。
【0021】
1態様は、与えられた信号を捕捉する際にMSによる使用のために以前に受信した捕捉情報が未だ有効であることを決定することによって、与えられた信号を捕捉しようと試みる場合に、それによってセルラ電気通信システム中の移動局(MS)が捕捉補助情報を受信する必要性を回避する方法を含む。
【0022】
他の1態様は、それによって捕捉補助が複数の信号を捕捉するために利用されることができる方法を含む。複数のうちの第1の信号は、捕捉されることができ、第1の信号の測定値は、検索された複数のものの中の他の信号に関係する捕捉補助データを改善するために採用されることができる。
【0023】
しかも他の1態様は、移動局(MS)において信号を捕捉する方法を含む。本方法は、MSが第1の位置にいる場合に捕捉補助を取得すること、そしてそれから、別の新たな位置に移動しているMSにしたがって取得された捕捉補助データを補正することを含む。
【0024】
さらなる態様は、セルラ電気通信システムにおいてMS位置に対する変化を決定する方法を含む。本方法は、MSの位置に関係のある選択基準を満足する基地局(base station)(BS)のリストを利用する。本方法は、ある時刻においてそのようなリストに属するBSを後の時刻において“同じ”リストに属するBS(すなわち、同じ選択基準を満足するBSのリスト)と比較するステップを含む。
【図面の簡単な説明】
【0025】
【図1】図1は、移動局、サービスしている基地局、及びその信号が捕捉されようとしている衛星本体の代表的な基本配置を図示する。
【図2】図2は、複数の基地局を図示し、移動局の内部の基地局のリストが、移動局が位置を移動したという結論を引き出すために、どのように使用されるかを説明する際に使用される。
【図3】図3は、移動局により開始された所在地位置決定セッションのためのメッセージ・フローを図示する。
【図4】図4は、移動局により終了された所在地位置決定セッションのためのメッセージ・フローを図示する。
【0026】
[詳細な説明]
開示された方法及び装置の実施形態は、添付の図面に示される。図面では、同様の参照番号及び名称は、同様の要素又は類似の要素を指示する。
【0027】
本明細書中に説明されるシステム及び方法は、信号を捕捉する際に受信機を援助するために捕捉補助データを利用する、無線補助の所在地位置決定システムのようなシステムに対して適用可能である。大部分の無線補助の所在地位置決定システムは、全地球位置決定システム(global positioning system)(GPS)衛星本体(satellite vehicle)(SV)信号を捕捉すること及び利用することが可能である。上記に説明したように、現在のGPS SV信号は、CDMA電気通信信号に密接に関係するフォーマットを有する信号を送信する。したがって、本明細書中で説明される具体例のシステムは、CDMAセルラ電気通信システムに基づいている。しかしながら、いずれかの他の通信無線インターフェースが同様に使用されることができることは、当業者により理解されるであろう。
【0028】
信号捕捉位置及び照準(ranging)の両方の目的に対して、選択された通信信号のタイミングに関係する情報は、有用である。与えられた信号の認識できる特徴の到着を期待する時に、確認するために有用であり、その結果、信号の検索は、限られた時間の期間をカバーするだけが必要であり、そして、しかも、種々の信号の到着の時間を相互にできるだけ正確に決定するためにも有用である。この後者の情報は、下記に説明されるように照準目的のために使用されることができる。これらの両方のタイミングの問題は、信号の認識可能な特徴の“到着の時間(time of arrival)”を包含する。
【0029】
通信システムに関して知識のある者は、そのような到着の時間情報が信号の“符号位相(code phase)”と多くの場合に等価であること、を理解する。“符号位相”は、受信された符号と基準時刻において開始する同一符号との間の位相オフセットに関する到着した信号のタイミングを記述する。そのようにして、信号の“符号位相”を識別することは、信号の“到着の時間”を効果的に識別し、到着の時間を取得するために符号位相と信号の周波数との掛け算だけを必要とする。これら2つは、密接にかつ単純に関係するので、“到着の時間”は、“符号位相”とほぼ互換可能である。“到着の時間”の用語は、所在地決定システムにおいて、特に、通信システムの“符号”態様を共有しないシステムにおいて、しばしば使用される。
【0030】
本明細書中に説明されるシステム及び方法は、全てのワイアレス・システムにおいて容易に採用されることができる。照準目的のために捕捉される必要がある信号は、CDMA信号に限定されることなく、多くのその他のタイプを含むことができる。照準信号も、GPS SV信号に限定されることはない。例えば、基地局(BS)信号は、一般に照準のために使用され、照準信号は通信される必要がない。それにも拘らず、本明細書中で説明される具体例のシステムは、CDMA通信システムであり、“符号位相”が、そのようなシステムに関してより一般的に使用される。知識のあるものは、これらの用語の関係する本質を理解し、他の用語がより頻繁に使用されるシステムにおいてこれらの用語のうちの1つを使用して説明される概念を困難なく採用する。
【0031】
以下の記号表示が、本明細書全体を通して使用される:
・Rは、MS位置不確定性領域の半径である
・bSVは、SVクロック・バイアスである
・b^BSは、推定されたBSクロック・バイアスである
・b%BSは、BSクロック・バイアス不確定性である
・bMSは、MSクロック・バイアスである
・b^MSは、推定されたMSクロック・バイアスである
・b%MSは、MSクロック・バイアス不確定性である
・d^MSは、GPSとMSのCDMA受信チェーンとの間の推定された時間遅延差である
・d%MSは、GPSとMSのCDMA受信チェーンとの間の推定された時間遅延差の不確定性である
・Δf^MSは、推定されたMS周波数オフセットである
・Δf%MSは、推定されたMS周波数オフセットの不確定性である
・fSVは、SVドップラーである
・αは、SV仰角である
・cは、光速である
・fcは、チップ・レートである(GPS C/A符号に対して、fc=1.023MHz)
・rVBS_MSは、BSからMSに向かうベクトルである
・rVBS_SVは、BSからSVに向かうベクトルである
・rVMS_SVは、MSからSVに向かうベクトルである
現在のシステムにおいて、全地球位置決定システム(GPS)衛星本体(SV)信号に関する捕捉補助データは、移動局(MS)に提供される。この捕捉補助データを提供するための正確な手順が、例えば、TIA/EIA IS−801−1のような、種々の所在地位置決定シグナリング規格に規定されている。これらの規格の少なくともあるものは、セルラBSに関係する類似の捕捉補助情報を伝達するための方法を提供し損なう。よく知られたように、GPS SV信号以外の信号、例えば、セルラBSパイロット信号、も、照準信号ソースとして使用されることができる。現在まで、この欠点は、深刻であると見られていていない。これは、BS捕捉補助情報が、一般的にその他のワイアレス・シグナリング方法を介して、例えば、TIA/EIA IS−2000の近接者リスト・メッセージ(Neighbor List Message)の形式で、MSに提供される。しかしながら、そのような捕捉補助は、ワイアレス・ネットワークにおいて一体となったハンドオフを容易にするために調整されていて、所在地位置決定測定を容易にするためではない。したがって、既存の捕捉補助技術が最適な性能より低い性能を与えるものの、その有効性は、所在地位置決定メッセージに中に明確なBS捕捉補助を加えることにより改善されることができる。所在地位置決定メッセージ中のさらに追加の明確な捕捉補助は、無線補助の所在地位置決定システムへの他の改善の実施も容易にする。
【0032】
信号ドップラー・シフトの捕捉の補助
下記の比較的簡単な方法は、信号捕捉補助を提供するために使用されることができる。予測されたドップラー周波数が、MSにより非常に正確に知られる必要がないので、SV信号のドップラー周波数オフセットの検索は、下記の方法を使用して狭められることができる。
【0033】
予測されたドップラー,D^,は、次式として導出されることができる
D^=fSV−Δf^MS (1)
そして、ドップラー検索ウィンドウ,WD,は、次式として計算されることができる
WD=R・q1+Δf%MS (2)
ここで、q1は、位置不確定性の原因である要因である。一般的に、q1=10−3Hz/mが使用される。
【0034】
簡単な符号位相補助法
図1は、サービスしている(serving)BS(又は基地送信局BTS)104と通信しているMS102を図示する。BS104と通信するMSは、MS102がBS104の交信領域の中に位置することを意味する。サービスしているアンテナ106が、示されたようにサービスしている基地局から直接的に作動されるのであれば、(例えば、通信経路中に中継器が何もなければ)、BS104の交信領域の適切な第1の推定値は、BSアンテナ106を中心とする円である。順に、この交信領域は、移動局102の位置に関する不確定性領域と一致する。その場合には、SV112のアンテナ110と移動局102のアンテナ114との間の信号108に関する符号位相予測(すなわち、符号位相ウィンドウ中心)及び符号位相予測不確定性(すなわち、符号位相ウィンドウ・サイズ)は、米国特許第6,429,815号に記載されたもののようないずれかの適切な計算技術を使用して、幾何学的な方法により容易に決定されることが可能である。最大符号位相116は、SV112からサービスしているセル118の最も遠い点への距離に対応し、一方で最小符号位相120は、SV112に最も近いサービスしているセル118の点に対応する。
【0035】
MSは、次式として表される符号位相Pを観測する
【数1】

【0036】
予測された符号位相、P^、は、次式として表されることができる
【数2】
【0037】
そして、ウィンドウ・サイズ、W、は、次式として表されることができる
【数3】
【0038】
算出された符号位相予測パラメータ、P^及びW、は、セルラ通信シグナリングに関する既存のメッセージ・フォーマットを使用して、BSからMSに送信されることができる。実際の符号位相108を図示する図1の線は、rVMS_SVに対応することに注意する。BSアンテナ106からMSアンテナ114への信号(補助)を示している線122も、照準ベクトルrVBS_MS・rVBS_SVがBSアンテナ106からSVアンテナ110へのベクトル、これは図1に対応する線で示されていない、であることも示している。
【0039】
この簡単な方法は、MS及びSVの中のクロック・オフセット(クロック・バイアス)が既知である限り良好に機能する。SVクロック・オフセット(バイアス)は、ワイアレス・システムの所在地決定エンティティ(Position Determination Entity)(PDE)(図1に図示されず)に対して利用可能な天体暦パラメータから決定されることができる。例えば、もし、以前の良好に行われた所在地位置決定測定の間に算出された後でそれが記憶されたのであれば、MSクロック・オフセット(バイアス)も、利用可能である。しかしながら、以前に決定されたMSクロック・オフセットが、継続して有効でないことがある。MSクロック・オフセット(バイアス)が利用可能であると決定されてしまうと、データがクロック周波数誤差について情報を用いて取得されてからの時間を比較することにより、有効性をテストされることができる。もし、クロック周波数誤差が無視できることを記憶されたデータが示すのであれば、又は正確な情報が周波数誤差を補正することを可能にするのであれば、MSクロック・オフセット値は(補正されたとして)、有効であると見なされることができる。もし、MSクロック・オフセットが信頼性良く知られないのであれば、式(5)に示されたように、符号位相ウィンドウWは、追加のゼロでない余裕、b%MS(MSクロック・バイアス不確定性)だけ拡大されるはずである。CDMA規格使用における既存のメッセージ・フォーマットにしたがって、信号値は、PDEからMSに送信されるはずであり、全体の検索ウィンドウ・サイズを表す。
【0040】
拡大符号位相補助法
そこではBSがGPS時間と同期されている、IS−95、IS−2000又はIS−856のようなワイアレス・システムは、これもGPS時間にほぼ同期されているMSを有する利点を提供する。これらの場合には、MSクロック・バイアスは、BSからMSへの信号伝播遅延と組み合せられたBSシステム時間オフセットに基本的に帰すべきである。MSにより観測される符号位相Pは、下記のように表されることができる:
【数4】
【0041】
利用可能なデータの与えられたセットに関する最小符号位相ウィンドウ・サイズを生成するために使用されることができる符号位相補助パラメータ・セットが、望まれ、下記のように取得されることができる。MS位置不確定性領域内の各点に対して、式(6)にしたがって値Pを算出し、そして不確定性領域内のすべての点にわたり、P^min及びP^maxにより表されるこれらの値の最小値及び最大値を決定する。次に、符号位相補助パラメータは、以下のように算出される
P^=(P^min+P^max)/2 (7)
そして
W=P^max−P^min+fc・(b%BS+d%MS) (8)
式(8)にしたがって算出されたWは、BSからMSへの信号伝播遅延に起因するMSクロック・バイアス不確定性の成分を既に考慮していることに、注意する。したがって、追加の余裕b%BS及びd%MSは、BS及びMSのハードウェア遅延の不確定性だけを考慮する必要がある。よく校正されたMSに対して、d%MSは、しばしばゼロになると考えられることができる。SVクロック・バイアス中の不確定性も、一般的に小さく、多くの目的に対して、ゼロになると考えられることができる。
【0042】
不確定性領域内の全ての点にわたる最大値及び最小値を検索することにより最適化された捕捉補助パラメータ・セットを生成することは、計算には不都合であるが、単純化がわずかな精度の低下で使用されることができる。例えば、PがMS所在地の連続関数であるけれども、実際的な検索は、チップ長及びサンプリング分解能のような因子により有限なステップ・サイズに制限される。したがって、検索は、隣接する格子点がc/(q2・fc)だけ分離されている格子の点に限定されることができる。ここで、q2は、ほぼ選択された定数、例えば、q2=4、である。計算上の負荷を削減する他の1つのアプローチは、ニュートン反復のような反復検索アルゴリズムを採用することである。
【0043】
検索空間は、下記の観察を考慮することにより削減されることができる。最小値及び最大値、P^min及びP^maxがMS位置不確定性領域の周辺上のどこかで発生することが、示されることができる。したがって、外部の値の検索は、周辺への検索を制限することにより促進されることができる。一般に、不確定性領域は、3−Dの対象物であり、それゆえ検索は、‘表面’にわたり行われるはずであることを、注意する。
【0044】
その中では上記の方法が計算された符号位相ウィンドウ・サイズを削減するために使用されることができる1つの方式の図式的な理解は、極端な場合を考えることにより得られることができる。MSの位置から見ることによりSVがBSの後に“見られる” (一般的に低高度のSVを含む)場合に、ベクトルrVBS_MS及びrVBS_SVは、平行であるが、逆方向を向いている。符号位相不確定性は、この幾何学配置により規定される線に沿って本質的にゼロである。MSからBSへの符号位相及びMSからSVへの符号位相が正確に前後に並んで変化しなければならないので、その通りである。MSがBSからさらに遠くへ移動すると、MSクロック・バイアスは、追加の遅延だけ増加する。MSクロックのこの変化は、SV信号の実際の符号位相の増加と正確に等しく、MSの立場から遅延を相殺する。式6の後半部分を考察すると、2つのベクトルの大きさは、幾何学的に加算されて一定値になり、残りの大きさは、一定値又は重要ではない。そのようにして、観測された符号位相、P、は、MSからSVへの距離に無関係である。言い換えると、MS位置不確定性及びMSクロック・バイアス不確定性のいずれもがゼロでなくとも、符号位相ウィンドウWは、ゼロに削減される。
【0045】
Wが、その信号が検索されるSVからまっすぐに離れるBSアンテナから伸びる線に沿ってだけゼロに削減されるけれども、原理は、BSとSVとの間の線に沿って位置するものを除いて全てのMS位置に対するWの削減をもたらす。したがって、拡大符号位相補助法は、前に説明された簡単な方法に好ましく、その理由は、一般に、これがより小さな検索ウィンドウ・サイズを与えるためである。もし、そのようなその他のBSが、その信号が検索されるSVに偶然したがっているのであれば、この技術は、サービスしているBS(これがMSクロック・バイアスを決定する)以外のその他のBSに拡大されることが可能であることに、注意する。この目的のために、そのような他のBSのパイロットの測定値は、MSクロック・バイアスを相殺するために使用されることができる測定値を与える。実効的に、その他のBSは、特定のSV捕捉の目的のためにクロック・ソースとして使用されることができる。
【0046】
部分測定値を用いた推定値の改善
特定のシステムにおいて、複数のSV信号の捕捉は、同時に検索される。しかしながら、全ての所望のSV信号に対する測定は、限られたハードウェア・リソースのために、通常は同時に試みられない。たとえ、複数の信号に対する検索が同時に始められたとしても、あるSVは、その他のものよりも早く見つけられるはずである。その理由は、符号位相ウィンドウにおけるそれらの所在地が早い時期に検索されるように計画されているからである、又はこれらがより短い集積時間しか必要としないためである、若しくは両者のためである。この事実は、複数の信号を捕捉しようと検索する場合に、検索の結果既に捕捉されてしまった1又はそれより多くの信号の測定値に基づいて未だ捕捉されていない信号に対する検索ウィンドウを連続的に狭めることにより活用されることができる。
【0047】
もし、SVがほぼα=90°の仰角であり、MS及びBSの高度が既知であるならば、MSクロック・バイアスの良い近似は、1つのSV測定値を取得した後で達せられることができる。BSの高度(より厳密にはBSアンテナの高度)は、一般的に既知であり、MSの高度は、援助している補助データの高度から良く近似されることが可能であることに、注意する。頭上の衛星は、しかも、おそらくMSにより容易に見分けられる比較的強い信号を有し、したがって、SV信号のグループが検索される場合に、そのようなSVからの信号を最初に捕捉しようと努力することは有用であり得る。
【0048】
SVがほぼα=90°の仰角であるとき、次式で表される
|rVMS_SV|−|rVBS_SV|≒h^MS−hMS (9)
ここで、hMSは、MSの高度であり、h^MSは、MSの推定された高度である。(rVBS_SVにおいて、BSの高度は、推定されたMSの高度と同じに調整されることに、注意する。)しかも、BSが、P^の算出において、b^MS=0である式(4)を使用すると仮定する。次に、式(3)、(4)及び(9)から、真のMSクロック・バイアスbMSは、次のように算出されることができる
bMS=(P^−P)/fc+(hBS−hMS)/c (10)
一旦、MSクロック・バイアスが決定されると、MSクロック・バイアス不確定性値が正確に既知である限り、以前にWの中に含まれていた追加の余裕、fc・b%MSは、削除されることができる、又は少なくとも削減されることができる。したがって、残りのSV信号に対する検索時間は、削減されることが可能である。MSにおいてWにそのような連続的な減少をもたらすために、余裕b%MSは、式(5)に提案されたように全検索ウィンドウ・サイズの中に織り込まれるよりはむしろ、別々の値としてPDEからMSに送信されるべきである。これは、現在の規格によって現在規定されているように既存のメッセージ・フォーマットに対して小さな変更を要求する。
【0049】
部分的なSV測定値に基づいて、MSにおいて検索ウィンドウを連続的に削減することは、PDEにより使用されたクロック・バイアス推定値b^MSがMSにも利用可能であるならば、最も良く作用する。上記の例において、これは、b^MS=0に設定することにより実現された。b^MSの値を正確にMSへ送信することは、任意のb^MS値に対して良い解であるが、既存のシグナリング・メッセージへの別の小さな変更を必要とする。
【0050】
このように、信号のリストの部分捕捉は、符号位相推定値又は不確定性ウィンドウのMSクロック不確定性成分を削減するために使用されることができる。これは、他方で、もし(MSのような)算出しているエンティティに利用可能なデータが、MSクロック不確定性成分を正確に含むのであり、及び検索リストから既に捕捉された信号が、ほぼ真上にあるSVからである場合に、特に有用である可能性がある。他方で、MSとSVが、MSによって受信されたBSの反対側である時に、幾何学的な考慮は、低い高度であるSVにより送信されたSV信号に対するWを実質的に削減できる。上記したように、MS計算があたかもそのような測定可能なBSのパイロット信号に基づいているかのように調整されるのであれば、任意の測定可能なBSは、この目的のために使用されることができる。これらの技術に加えて、その他の適切なナビゲーション技術が、部分測定値とともに採用されることができ、引き続く信号捕捉のための捕捉補助を改善する。
【0051】
符号位相ウィンドウ・サイズの最小化
追加の捕捉情報要素
MSは、PDEのようなシステム中の別のエンティティからBSを介して予測された符号位相パラメータを単に受信するよりはむしろ、予測された符号位相パラメータを算出するようにプログラムされることができる。この目的のために、MSに提供された捕捉補助は、推定されたMSの位置に対して相対的なBS及びSVコンステレーションの配置を説明する情報要素を都合よく含むことができる。これらの情報要素のあるものは、少なくとも複数の現在の規格により規定されるBSからMSへの捕捉補助メッセージの中に含まれていない。そのような追加のデータを送信することは、補助データの一部分として正確な符号位相検索ウィンドウ・サイズ及びドップラー検索ウィンドウ・サイズ情報を省略することにより少なくとも部分的に相殺されることができ、その結果、シグナリング・オーバーヘッドへの正味の影響は、小さくなる。
【0052】
ある種のセルラ電気通信捕捉補助規格に含まれていない有用な情報要素は、いくつかのカテゴリーに分類される。以下に説明される情報要素の任意の組合せは、計算された符号位相ウィンドウ・サイズの削減を支援するために、通常の工学的な考えにしたがって、特定の実行において使用されることができる。第1のそのようなカテゴリーは、“SV信号捕捉補助情報”と名付けられ、これは受信しているMSによりサービスしているBSから受信されようとしているものである。このカテゴリーは、例えば、下記の情報を含むことができる:
1)(複数の)SV信号PRN系列識別名;
2)(複数の)SV及びMS(rVMS_SV)の推定された相対的な(複数の)所在地、これは:(a)SVとMSの推定された位置との間の距離、及び(b)MSの推定された位置から見たとして、与えられた座標系におけるSVの方位角及び高度、として記述されることができる;
3)(複数の)SVクロック・バイアス(bSV)値(しかしながら、この項は、一般に1つの粗い捕捉(C/A)チップと等価な最小検索ウィンドウ・サイズと比較して小さいために、代わりに、これは、省略される、又は、c)を用いてスケーリングした後で、SVからMSへの距離に対する補正項として使用されることができる);又は
4)推定されたMS位置から見られたとして、ドップラー周波数に関する方程式の1次導関数、2次導関数、又は高次導関数さえ含む、SVドップラー周波数情報(fSV)、ドップラー周波数は、MSが将来の時間の中に符号位相及びドップラー予測を外挿することを可能にすることを含むことができる。
【0053】
捕捉補助要求メッセージの中に有用に組み込まれることができる情報要素の第2のカテゴリーは、もし、存在しなければ、“BS信号捕捉補助情報”と名付けられる。これは、MSからサービスしているBSにより受信されるべきである。このカテゴリーの情報は、例えば、下記を含むことができる:
1)(複数の)パイロット信号PNシーケンス識別名;
2)サービスしているBS及びMS(−rVBS_MS)の推定された相対的な所在地、これは:(a)BSとMSの推定された位置との間の距離、及び(b)MSの推定された位置から見られたとして、与えられた座標系におけるBSの方位角、として記述されることができる;
3)BSクロック・バイアス(b^BS);又は
4)BSクロック・バイアス不確定性(b%BS)。
【0054】
“MS位置不確定性”は、有用な情報要素の第3のカテゴリーであり、MSの推定された位置の周囲の領域を説明する。このカテゴリーの情報の要素は、BSから受信されることができる、又はMSの内部で算出されることができる。これらの要素は、例えば、下記を含むことができる:
1)3次元(3−D)不確定性楕円体、3−D共分散行列と等価である;又は
2)垂直不確定性値を有する2次元不確定性楕円。
これらの2つの要素は、一般的に、同時にというよりはむしろ、代案において使用されるはずである。
【0055】
“推定されたMSクロック情報”は、有用な情報要素の第4のカテゴリーであり、捕捉補助要求メッセージの中に有用に組み込まれることができ、もし存在しなければ、BSからMSにより受信されることができる、又はMSの内部で算出されることができる。このカテゴリーの情報は、例えば、下記を含むことができる:
1)MSクロック・バイアス(b^MS);
2)MSクロック・バイアス不確定性(b%MS);
3)MSクロック周波数オフセット(Δf^MS);
4)MSクロック周波数オフセット不確定性(Δf%MS);又は
5)MSクロック・バイアス推定値(T0)に関する有効性の時間、これは、例えば、正確な時間又は基準数、例えば、MS中に記憶された以前の測定基準時間を参照した測定系列数、のいずれかであることができる。
【0056】
“MS較正情報”は、有用な情報要素の第5のカテゴリーであり、符号位相計算及びウィンドウ計算を容易にするために、もし存在しなければ、捕捉補助要求メッセージの中に組み込まれることができる。これらの要素は、MSの内部に記憶されることができる。このカテゴリーの情報は、例えば、下記を含むことができる:
1)GPSとMS(d^MS)中のCDMA受信チェーンとの間の推定された時間遅延差;又は
2)GPSとMS(d%MS)中のCDMA受信チェーンとの間の推定された時間遅延差の不確定性。
【0057】
本明細書中で説明する方法及び装置とともに採用されることができる情報メッセージ及びプロトコルの一例は、添付された資料A(“総合的捕捉補助メッセージ(General acquisition assistance message)”と題される)に詳細に説明されている。添付された総合的捕捉補助メッセージは、CDMA規格IS−801−Aに含まれている特定のメッセージ、フォーマット、及びプロトコルを記述し、本明細書中のさらなる教示にしたがって、改善された無線補助の所在地決定を容易にするために提案されたそのようなメッセージ、フォーマット及びプロトコルへの変更を示す。
【0058】
MSのための捕捉補助データ算出法
上記に説明されたような適切な情報を受け取った後で、MSは、本明細書中で下記に述べられる方法にしたがって、符号位相推定値及び不確定性ウィンドウを計算できる。本方法は、捕捉されようとしている又は測定されようとしている信号に関する用語“SV信号”を使用する。その理由は、これが一般的な慣行であり、幾何学的に明白であるためである。しかしながら、その捕捉が検索される任意の信号は、下記の方法において測定されようとしている1つの“SV信号”のセットに対して説明されるとして取り扱われることができる。未追跡のBS信号のような、測定されようとしているその他の信号に関する全ての手順は、下記に参照されるものと、実質的に同様である又は同一であり、その結果、当業者は、本明細書中で厳密な指示を必要とせずにそのようなその他の信号に対する計算を容易に修正できる。したがって、捕捉補助(例えば、符号位相推定値及びウィンドウ)は、BS信号のような他の信号を容易に計算でき、他の信号はその後さらに容易に捕捉されることができる。そのような他の信号は、例えば、照準決定及び位置決定に関して、複数のSV信号と同じ目的の多くを供することができ、実際に必要であればSV信号を完全に補える。
【0059】
下記は、(典型的にSV)信号のセットを捕捉するために必要な捕捉補助データを取得し更新するためにMSによって使用されることができるステップの具体例のアルゴリズムである。このアルゴリズムは、時間に敏感なデータを含む−PN符号及び信号周波数のような、時間に敏感でないパラメータも、信号捕捉のために必要であるが、これらのパラメータは、一般にこのアルゴリズムにより取り扱われない。特定の信号を捕捉するために最終的に必要とされる補助は、特定の信号に対するドップラー周波数推定値及び不確定性ウィンドウとともに、符号位相推定値(又は到着の時間推定値)、及びその推定値の周囲の不確定性ウィンドウ・サイズを含む。下記のアルゴリズムは、概してMSにより使用されるステップを示すけれども、そのステップは、その他のエンティティにより代わりに実施されることができる。MSは、一般的に“最終的な”捕捉補助データ(符号位相、ドップラー・ウィンドウ及び対応する不確定性ウィンドウ)を計算する。そのような計算は、(PDEのような)遠隔エンティティから受信された捕捉補助データ・パラメータに基づいて、同様にMS内部での演算により以前に取得されてきていることがあり得る捕捉補助データ・パラメータに基づいて、及びある場合にはMSにより行われた測定値にさらに基づいて、実施される。MSは、しかも、中間パラメータも計算でき、例えば、時間又は所在地の変化を反映させるためにこれらを再計算できる。“取得及び更新捕捉補助(obtain and update acquisition assistance)”アルゴリズムの詳細は、下記に述べられる:
1.既存の捕捉補助データに関する利用可能性及び有効性を評価する、並びに下記のように測定されようとしているSV信号のセットに関する補助データを計算する:
a.MSクロック情報が利用可能ならば、可能な限り利用可能な補正項にしたがってMSクロック周波数を計算する:
i.MSクロック周波数補正情報が利用可能ならば、クロック・バイアスに次の値、Δf^MS・(t−T0)、を加えることにより(時刻T0の)推定されたクロック・バイアスb^MSを補正する、ここで、SV測定は、時刻tにおいて行われる。
【0060】
ii.MSクロック・バイアス不確定性補正情報が利用可能ならば、Δf%MS・(t−T0)を加えることにより(時刻T0の)クロック・バイアス不確定性b%MSを補正する。
【0061】
iii.もし、ステップi又はiiにしたがった補正が実行できないならば、直接関係する量の未補正値を使用する。
【0062】
b.もし、それが便利であるならば、高い仰角のSVから始めて、その信号が第1の信号捕捉のために測定されようとしているSVのセットから1つのSVを選択する。
【0063】
c.測定されようとしているSV信号のセットのうち少なくとも第1番目に対する予測された符号位相及び検索ウィンドウ・サイズを算出するために式(4)及び(5)を使用する。
【0064】
d.測定されようとしているSV信号のセットのうち少なくとも第1番目に対する予測されたドップラー及びドップラー検索ウィンドウ・サイズを算出するために式(1)及び(2)を使用する。
【0065】
e.もし、MSクロック情報が利用できないのであれば又は現在の測定に対して有効でないのであれば、MSは、MS測定に対してCDMA基準時間を使用する。
【0066】
i.測定されようとしているSV信号のセットのうち少なくとも第1番目に対する予測された符号位相及び検索ウィンドウ・サイズを算出するために式(7)及び(8)を使用する。
【0067】
ii.測定されようとしているSV信号のセットのうち少なくとも第1番目に対する予測されたドップラー及びドップラー検索ウィンドウ・サイズを算出するために式(1)及び(2)を使用する。
【0068】
2.このアルゴリズムのステップ1で説明したように計算された補助データに基づいて、測定された符号位相値を取得するために少なくとも1つのSV信号を測定する。
【0069】
3.任意の適切なナビゲーション・アルゴリズムにしたがって測定されようとしているSV信号のセットからの1又はそれより多くの信号からの測定結果を使用して:
a.MSパラメータR,b^MS,b%MS,Δf^MS,及びΔf%MSのいくつか又は全てを再算出する;
b.オプションとして、必要に応じてその他のパラメータ、例えば、rVBS_MS、rVBS_SV,及びrVMS_SV、を再算出する。
【0070】
c.オプションとして、測定されようとしているSV信号のセットから残っている1若しくはそれより多くの未測定のSV信号に関するα及び方位角を算出する。
【0071】
4.測定されようとしているSV信号のセットの全てが、捕捉された又は測定されたかを決定する。
全てが測定されたのであれば、捕捉測定を停止し(STOP)、MS位置の算出のような、所望の引き続くステップに進む。
【0072】
もし、測定されるべきSV信号が残っているのであれば、未だ測定されていないSV信号だけを反映させるために、測定されようとしているSV信号のセットを修正し、上記に説明されたようにステップ1に戻る。
【0073】
適切なナビゲーション・アルゴリズムの例が、米国特許第6,353,412号の中に見出されることができる。
【0074】
下記は、上記に説明された方法のステップ3を説明する一例であり、MSクロック・バイアス推定値が、既知であると仮定する。SV信号に対する符号位相Pが測定されていて、MSは、SV位置上の同心の2つの球の間の空間Vの中に囲まれていると決定されることができる。球の半径は、次の式により与えられる:
c[(P+bMS+bSV)+/−(|b%MS|+|Puncertainty|)],
MS位置は、空間Vと最も妥当な以前に推定されたMS位置不確定性領域との交差部分に制限されるので、更新されることができる。交差部分が以前に推定されたMS位置不確定性領域よりも小さければ、(Pの測定値の不確定性を認めた後で)MSクロック・バイアス不確定性を削減することが可能である。MSクロック・バイアス不確定性を削減する一例として、SVがα=90°の仰角である場合を考える。この場合には、Vは、2つの水平面によりほぼ規定される。したがって、MSクロック・バイアス不確定性は、測定不確定性を認めて、高度位置の不確定性と等価である高さに削減されることができる。
【0075】
下記の例は、本方法のステップ3の第2の手段(implementation)を説明する。この手段は、MSクロック・バイアスの推定値が利用できない場合、及びMSがサービスしているBSパイロット信号から自身の時間基準を導出することが知られている場合に、使用されるはずである。MSは、SVに1つの焦点を及びサービスしているBSに他の焦点をそれぞれが有する2つの双曲面の間の空間Vに位置する。2つの双曲面の特性距離差異(characteristic distance difference)は、(cにより掛け算された)fc・(b^BS+d^MS)により補正された測定された符号位相に基づく、ここで、b^BSは、推定されたBSクロック・バイアスであり、d^MSは、GPSとMSにおけるCDMA受信チェーンとの間の推定された時間遅延差である。2つの双曲面は、測定された符号位相中の不確定性及びb^BS及びd^MS中の不確定性を反映する距離だけ離される。更新されたMS位置は、Vと以前に推定されたMS位置不確定性領域との交差部分により与えられる。交差部分が以前に推定されたMS位置不確定性領域よりも小さければ、位置不確定性は、削減されることができる。
【0076】
上に述べられたステップ3の第2の手段は、サービスしているBSの代わりに、MSにより追跡された任意の2次の信号ソースを用いた使用のために修正されることができる(その結果、そのようなソースへの符号位相測定値がMSにおいて利用可能である)。そうするために、SVに対して測定されたPは、もし、時間基準、すなわち測定値、を提供されたそのような2次のソースが2次のソース信号の相対的な到着時間だけオフセットされることができるならば、MSが使用するはずである基準時間から再計算されることができる。そのような2次のソースに関連する対応する情報を使用して、それ以外は、計算は、サービスしているBSに関して上記に説明されたように進む。
【0077】
捕捉補助データ有効性の拡大−時間の考慮
捕捉補助データの有効期間は、その期間に、補助データがMSからのBSとSVの距離を正確に記述できる時間の期間の長さとして規定されることができる。有効期間は、SV及びMSの動きの程度に依存し、BSは静止していると考えることができると仮定する。静止MSに対して、SV捕捉補助データの有効期間は、SVドップラー・シフトを記述する方程式中の高次の項に対して与えられる係数の利用可能性及び精度に応じて、30秒から1時間の範囲である。
【0078】
補助データの(可能性のある実質的な)有効期間を利用することは、信号を捕捉するために必要な時間を削減するために、及び頻繁な補助データの更新のための必要性を削減することによって通信リソースを保存するための両方に、利益をもたらす。しかしながら、補助データの効果的な利用は、MSクロック同期及びMS位置に関係する現在のシステム特性により妨害される。
【0079】
第1に、MSは、基地局のハンドオフ(又は、サービスしているBSのその他の変更)に起因して、自身の時間基準をしばしば変更する。これは、信号の減衰、トラフィックの状態、又はその他の原因からの結果であり得る。時間基準として使用されるパイロット信号に変更が生じる場合に、その信号の捕捉が検索されている(SV又はBSからの)信号の観測された符号位相は、元々の符号位相補助が役に立たなくなるほど大きな値だけオフセットされることがある。そのような場合には、MSは、適切な補助データを算出するために、新しいサービスしているBSを基準にするようにrVBS_MS値を更新することができる。
【0080】
捕捉補助データ有効性の拡大−動きの考慮
補助データの効率的な利用に対する第2の障害は、静止していないMSが以前の符号位相補助データを無効にするのに十分な距離だけ位置を変えることがあるという事実から発生する。もし、MSが捕捉補助データの受信から移動し、そしてMSが自身の新しい位置の推定値を取得できるのであれば、以前に受信されたその他の捕捉補助情報(これは未だ有効であると仮定する)に基づいて、MSは、捕捉補助データを計算するために新しい位置推定値を単に使用できる。MSは、いずれかの利用可能な都合の良い手段により新しい位置推定値を取得できる。例えば、MSは、比較的狭い所在地推定値を導出するために高度順方向リンク三角測量(Advanced Forward Link Trilateration)(AFLT)を行える。位置の推定値は、新しいサービスしているBS単独のサービスしているセクタに基づいて設定されることが可能である。サービスしているセクタ推定値は、部分的な測定値、例えば、移動局により追跡されている第2のBSへの符号位相、によりさらに制限されることがある。そのような部分的な測定値は、サービスしているセクタとサービスしているBS及び(例えば)第2のBSの焦点により規定される双曲面の周りの不確定性領域の交差部分に限定された不確定性領域を規定できる。この例では、双曲面は、サービスしているBSに関する第2のBSの相対的な符号位相により決定される特性距離を有する。不確定性値、すなわち通常の双曲面のどちらかの側の範囲は、2つのBSに関するクロック不確定性の合計、及び(cを掛け算した)各々に対する符号位相の測定値の不確定性の合計を含む。必要に応じてMS位置情報を更新することによって、多くの捕捉補助データの有効な寿命は、将来に向けて外挿する能力により課せられた時間制限まで延長されることができる。これは、上記に説明されたように、信号ソース(SV)のドップラー・シフトを説明するより方程式の高次のものに対する係数の精度及び利用可能性により制限される。
【0081】
MSが移動したかどうかを決定するために使用されることができる他の1つの技術は、“BSリスト比較”である。複数のBSは、そのリストに対して固有である基準にしたがってリスト中の構成員に対して選択される。条件が変化すると、これらの固有の基準は、更新されたリストの構成員を構成するBSの異なるセットを識別する。したがって、その用語が本明細書中で使用されるように、“同じリスト”は、矛盾のない基準及び手順により達したリストを呼び、そのようなリストの構成員は、変化している条件を反映させるために時間にわたり変化することを期待される。
【0082】
BSリストは、リスト中の構成員に対する基準がMS位置を顕著に反映するのであれば、MSの動きを決定するために適切であり得る。この目的のために適切なリストの例は、“近接者リスト(Neighbor List)”、“アクティブ・セット(Active Set)”、又はサービスしている(serving)BSを含む。その他のリストは、特に、これらの固有のリストを全く使用しない、非CDMA方法において、当然、適切であり得る。“サービスしている”BSは、サービスされているMSと主に通信しているBSである。“近接者リスト”は、サービスされているMSに対してサービスしているBSにより与えられ、比較的近くであるBSを識別するが、一般に、MSの“アクティブ・セット”の中にあるBSを含まない。“アクティブ・セット”は、MSによりアクティブに追跡される強いパイロット信号を有する(一般的に1−6)のBSのリスト又はグループである。
【0083】
BSリスト比較技術は、MS位置を再計算すべきかどうか、及び新しい位置に関する捕捉補助データを補正すべきかどうかを決定するために使用されることができる。あるいは、この技術は、現在のMS所在地に基づいて、以前の捕捉補助データ(又はその他のデータ)が未だ有効であるかどうか、又は有効でないかどうかの指標として単に使用されることができる。複数の目的のために、この技術は、MSが既存のワイアレス通信規格にしたがってMSに対して通常は利用可能にさせない任意の情報を取得することを必要としない、そのようにして、本技術は、そのような規格の中に述べられた要求の変更に関係なく実施されることができる。さらに、MSが移動したかどうかに関する決定は、捕捉情報が有効なままで残っているかどうかを決定することだけでなく、その他の位置に敏感な課題に関しても有用であり得る。例えば、実質的なMSの動きの決定は、新しい所在地位置決定セッションをトリガするある種の状況において使用されることができる。MSの動きの決定は、BS暦(BS almanac)、中継器暦、等のような位置に敏感なデータの更新もトリガできる。
【0084】
MSの可能な動きは、下記の過去の版と現在の版との間のいずれかの項目に何時でも変更があると推定されることができる。その項目は、(a)MSに対するBSの近接者リスト、(b)MSに対するBSのアクティブ・セット、又は(c)MSに対してサービスしているBSである。それゆえ、いかなる変更もなければ、何の動きも生じなかったと推定されることができる。この結果は、例えば、MS位置推定値を更新する必要性を回避でき、以前に取得された捕捉情報(又はその他のMSの所在地に敏感な情報)が有効なまま留まっていることを示すことができる。もし、この比較の組合せのある部分が変化すれば、最も単純な場合では、その有効性が問題になっているデータが、無効であると仮定される。しかしながら、既存の位置に敏感な情報の精度、及びそれゆえ有効性を危うくする(jeopardize)のに十分なMSの動きが実際に生じたかどうかを、無効であることを過度に結論することなく決定するために、より詳細な解析が必要とされることがある。
【0085】
MSが著しく移動したかどうかに関するより詳細な解析は、例えば、直接関係のあるBSリスト中のいずれかの小さな変化によりトリガされることができる。その目的ために動きが検出されようとしている目的に依存して、適切な複雑さで、解析は、簡単である、又は複雑であり得る。例えば、動きを検出する目的がローカル中継器、又はSVのリストを更新するかどうかを単に決定するためであるならば、解析は、サービスしているBSが変更されたかどうか、及びアクティブ・セットも変更されたかどうかを単に検査するように簡単である。しかしながら、E991緊急時位置決定の目的のためには、高感度の解析が望まれることがある。解析の感度及び複雑性は、通常の技術的考慮、例えば捕捉の速度に対する処理の労力をバランスさせること、にしたがって選択される。
【0086】
図2に示されたように、ある領域のまわりに複数のBSが設置されていると考える。この議論の目的に対して、BS1とBS10との間の距離が約10マイルであると仮定できる。特定のMSがBS2,BS3及びBS4からなるBSのアクティブ・セットを初めに有すること、及びサービスしているBSがBS3であると、さらに仮定する。BS4とBS6は、互いに比較的近くであり、MSは、どちらのBSもMSのアクティブ・セットに含まれることに同等に適しているような位置であることができる。したがって、BS4がアクティブ・セットから落とされて、一方でBS6が追加されるのであれば、除かれたBSと追加されたBSの近さは、MSの動きの結論がこの変更だけからは信頼できるように導くことができないことを意味する。それゆえ、アクティブ・セットに対してBS4を削除してBS6を追加するような小さな変更は、重要なMS位置の変化を表さないと扱われるはずである。しかしながら、リストに対するそのような小さな変更でさえも、小さな変更を示すMSの動きの弱い形跡の確証に関する1又はそれより多くの追加の指標の調査をトリガするために使用されることができる。そのような確証は、例えば、その他のリストの調査、又は照準信号データの調査から取得されることができる。
【0087】
MSのアクティブ・セットにおいてBS4に置き換わるBS6の小さな変更は、実質的な動きを示していないとして(自身によって)解釈される(interpreted)ことができる。同じ初期のアクティブ・セット(BS2,BS3及びBS4)が与えられるが、しかしながら、BS3,BS5及びBS7への変更は、サービスしているBSが同じ(BS3)に留まったとしても、著しいMSの動きが生じたことを示唆する。したがって、アクティブ・セット中でそのような変更の後で、位置情報及び捕捉補助は、それがサービスしているBSのセルより狭い位置不確定性を示すとしても、無効になると仮定されることができる。(勿論、サービスしているBSが同じままで残るのであれば、サービスしているセル境界の内部で位置を示している非常に粗い情報は、有効なまま留まることができる。)情報が無効になると見られるならば、MSにおける捕捉補助に対する必要性は、サービスしているBSからの新たな捕捉補助に関する要求を保証するはずである。
【0088】
近接者リストは、上記に説明されたアクティブ・セットの使用と同様な方法で使用されることができる。例えば、(アクティブ・セット中にBS3,BS4及びBSを有し)BS1,BS2及びBS5を含む元々の近接者リスト、そしてそれがBS5を削除しBS7を追加するように変更することは、特にBS6がサービスしているBSで留まるのであれば、実質的なMSの動きを示さないことがあり得る。しかしながら、アクティブ・セットが、BS3,BS4及びBS6を含み続けつつ、近接者リストがBS1及びBS2を削除し代わりにBS7及びBS8を追加する(したがって、BS5,BS7及びBS8だけを含む)のであれば、BS6がサービスしているBSに留まっているとしても、MSの動きは、推定されることができる。
【0089】
(サーバBS、アクティブ・セット及び近接者リストのいずれか又は全ての組合せにおける)特定の変化が実質的な動きを示唆するように取られるべきであるか否かに関する決定は、定量化されることができる。任意の適切な技術が使用されることができる実際に異なる技術が、異なる目的のために(例えば、異なるデータに関して)又は異なるBSのセット (例えば、全ての認識できるBS,アクティブ・セットBS、又はサービスしているBS) に対して使用されることができる。
【0090】
“重要な”MSの動き又はMSの動きを“危うくするデータの有効性”が生じたかどうかについての決定を定量化するために採用され得る1つの技術は、早い時刻におけるBSのリストを表している第1の点と後の時刻における同じBSのリストを表している第2の点との間の“見かけの変化”ベクトルを決定することである。もし、リスト上のBSのそれぞれまでの距離の二乗和が最小にされるようにある点が位置するのであれば、ある点は、BSの固有のリストを表すと考えられることができる。第1の点から第2の点へのベクトルは、“見かけの変化”ベクトルと呼ばれることがある。“見かけの変化”ベクトルは、任意の関係のあるBSのセット(例えば、近接者リスト、アクティブ・セット、組合せリスト、等)に対して計算されることができる。各“見かけの変化”ベクトルは、独立していると考えられる、あるいは、異なるリストから生成されたベクトルは、ベクトル的に統合される(その他の統合も、当然可能である)。結果としてのベクトルは、適切に選択されたしきい値に対して(個別に、又は統合された後で)比較されることができる。選択されたしきい値を超えている結果は、MSの実質的な、データを危うくする動きを表しているとして解釈されることができる、一方で、そのようなしきい値より下の差異は、取るに足らないとして解釈されることができる。
【0091】
“見かけの変化”を計算する簡単な一例は、再び図2を参照して説明される。時刻T0において、BSの第1のセット(アクティブ・セット)は、BS1,BS2及びBS3から構成される。後の時刻tにおいて、アクティブ・セットは、BS3,BS4及びBS6から構成される。Sum1=(d1 202)2+(d2 204)2+(d3 206)2を最小にすることによって、第1の点208は、位置を決定される。第2の点210は、Sum2=(d4 212)2+(d5 214)2+(d6 216)2を最小にすることによって位置を決定される。“見かけの変化”ベクトル218は、第1の点208と第2の点210との間に存在する。アクティブ・セット及び近接者リストのようなBSセットが相互に排他的であるならば、2つのBSが2つ異なるセットにおいて場所を交換する場合に、1つのセットの“見かけの変化”ベクトルは、他のセットの“見かけの変化”ベクトルをある程度相殺する傾向がある。重み付けは、改善として追加されることができる。適切なしきい値は、BSグループ結果が統合されるかどうかに依存する。開始しきい値は、以前の位置不確定性及び現在の位置不確定性の合計の1/6に設定されることができる。代わりのしきい値は、複数のBS間の平均距離の45%として計算されることができる。
【0092】
そのようにして、現在及び以前のサーバBS、近接者リストBS、及びアクティブ・セットBSのある種の組合せの比較に基づいてMSの動きを評価する方法は、開発されることができる。その方法は、技術的な考慮及びその他の要因に応じて、望まれるように可能な限り単純である、又は複雑であることがある。そのような考慮は、BS位置情報の利用可能性、それにより近接者リスト及びアクティブ・セットが選択される方法、及びそれに対してそのような評価が行われる課題の位置感度を含むことができる。
【0093】
選択されたMSが動いたかどうかを評価する目的のために、BSのグループへの変化は、上に述べられたように検査されることができる。しかしながら、グループは、幅広く変化することがあり、BSに制限される必要性はないが、いずれかの有用な信号ソースを含むことができる。グループ(又はリスト)中に包含するための基準がMSへの近さに主に基づくのであれば、1つのグループは、直接関係する可能性がある。種々のグループの構成員であることの変更の価値及び重要性は、そのようなグループの特有な特性に依存し、異なるグループからの結果は、その他のグループからの結果と統合される前に重み付けされる必要がある。任意のグループの名前は、無関係であり、アクティブ・セット、近接者リスト及びサービスしているBSの固有の名前は、MS位置決定に関係のあるCDMAシステムにおいて知られたグループへの便利な参照を与えるという理由だけで、本明細書中に使用される。その他のシステムでは、包含するための基準がこれらの特定のBSグループに対する基準から著しく異なる場合でさえ、異なるグループが直接関係することがあり得る。種々のグループにおいて構成員の直接の関係性と重要性との間の相違は、ケース・バイ・ケースで考慮される必要があり、重み付けは、異なる重要性又は感度のグループへの変化から導出されたMS移動の表示を統合する時に課せられる必要があり得る。
【0094】
CDMA電気通信システムにおける捕捉補助メッセージのための通話フロー
図3は、MSが所在地位置決定セッションを開始する時の、又はそれ以外は捕捉補助に関する必要性を識別する時のメッセージ・フローを説明する。そのような必要性は、例えば、ユーザがMSから位置情報を要求する場合に生じることがある。図3において、MSは、時間302の間に捕捉補助情報に関する必要性を認識する。引き続く時間304の間に、MSは、複数の動作を開始し、これは連続である必要はない。メッセージ306は、準備され、サービスしているBSへ送信される、そこでは、システム内部の所在地決定エンティティ(Position Determining Entity)(PDE)に通信されようとしている。メッセージ306は、MSの能力についてサービスしているBSに情報を提供でき、高度な位置情報を解釈する、及びローカルに位置情報パラメータを計算し、必要とされる捕捉補助パラメータに関する情報を計算する。メッセージ306は、しかも、MSの位置に関するそのような情報、MSに対して既に利用可能な情報(しかしながら、その情報は粗い可能性がある)、例えば、サービスしているBSの認識、アクティブ・セットBS及び対応するパイロット測定値のリスト、近接者リスト、CDMAオーバーヘッド・メッセージからのLAT/LONG、等、のような情報も提供できる。PDEを援助するいずれかの又は全ての情報は、送信されることができ、PDEとデータ通信していない可能性があるサービスしているBSについての情報を含む。捕捉補助を要求しているメッセージも、“総合的捕捉補助の提供(Provide General Acquisition Assistance)”と名付けられたメッセージのように、BSを介してPDEに送信される。
【0095】
捕捉補助要求メッセージ306を用意すること及び送信することに加えて、時間期間304の間に、MSは、しかも、有用である可能性のあるBS信号に関する情報を捕捉することも開始できる。これは、MSが未だ追跡していないBS信号を捕捉すること、及び有用な照準情報を提供できるBS信号を測定することを含むことができる。この時間の間に、MSは、MSがそのようなBSに関して利用可能な暦情報に加えてなされたBS測定値を使用する高度順方向リンク三角測量(AFLT)によるように、自身が有する位置情報を改善するために努力することもできる。任意のBSパイロット信号が中継器を介して到着したように見られるかどうかを決定することに有用である可能性があり、その結果、そのような信号が、適切に処理されることができ、サービスしているBSから直接送信されてきているように取り扱われないことがあることに、注意する。もし、これらの処理(task)が、捕捉補助情報がBSを介してPDEから来る前に完了するのであれば、MSは、そのような捕捉補助情報を受信する前に、MSが必要であるいずれかの信号を捕捉することを試みることが可能である。
【0096】
PDEがBSを介してMSに捕捉補助情報信号308を送信した後で、時間310の間に、PDEから与えられた捕捉補助情報にしたがって、同様にローカルなBS符号位相の測定値にしたがって捕捉補助パラメータを算出する。そのような算出に関する種々の技術が、上に述べられている。
【0097】
捕捉されようとしている少なくとも第1の信号に関する捕捉補助情報をMSが算出した後の時間312の間に、MSは、実際に信号を捕捉するために、結果としての推定された符号位相とウィンドウ、及び信号の特性を使用する。MSクロック・バイアス不確定性を削減することを可能にし、そしてその後、所望の信号のリストの一部分だけの測定値に基づいて符号位相不確定性を連続的に“狭くすること”にしたがって、引き続く信号に対して算出された捕捉ウィンドウを削減することを可能にするために、ほぼ真上にあるSVから始めることは、有利である可能性がある。この時間の間に、MSは、必要に応じて照準信号を捕捉することを一般に完了する。もしそれがMSの範囲内であるならば、MSは、自身の位置も算出できる、又はそれ以外はMSが測定する生の照準情報を解釈できる。これらの処理を完了した後で、MSは、適切な1つのエンティティ又は複数のエンティティにメッセージ314を送信して戻す。メッセージ314は、もし決定されているならば、一般に照準信号測定値及び位置の結果を含む。メッセージは、“総合的測定メッセージの提供(Provide General Measurement Message)”と名付けられた標準メッセージであり得る。
【0098】
図4は、他の1つのエンティティが所在地位置決定セッションを開始する場合の、それ以外は、MSがその信号に対して捕捉補助が必要とされる信号を検索するように管理する場合の、メッセージ・フローを説明する。そのような場合には、MSは、メッセージ402によって必要性を知らされるまでさらなるそのような所在地決定の行動を開始しない。メッセージ402は、総合的捕捉補助を提供することができる。総合的捕捉補助では、BS又はPDEは、初期の捕捉補助データ及び初期の位置情報を決定するために、自身が有する情報、例えばMSに対してサービスしているセルの位置のような情報を使用する。メッセージは、一般的に総合的測定に対する要求を含み、所在地決定に対して使用されるべき信号のリスト、その他のような、さらなる情報を含むことができる。そのようにして、MSは、メッセージ402を受信した後で時刻404において、信号を捕捉することの必要性を決定する。
【0099】
メッセージ402を受信した後で、MSは、図3に関して上記に説明したと同様に進めることができる。近接者リストのBSのような関係のあるBSの捕捉は、時間の期間406の間に行われることができるが、この時間の期間は、メッセージ402中に初期の要求とともにMSに提供されるさらなる情報のために、図3の対応する時間の期間304と比較して短くされることができる。
【0100】
MSは、有用なBSを測定した後で、時間の期間408の間に捕捉パラメータを算出するために進むことができる。これらの行動は、示された期間の間に事実上は部分的に重なることがある。時間の期間410の間に、期間408における算出から、又は要求メッセージ402から、そしてその上にMSにおいて行われた測定値から取得された捕捉補助を使用でき、関心のある信号を実際に捕捉し、測定する。捕捉が完了した後で、MSは、メッセージ412においてBSを介して要求しているエンティティに測定データを単純に送り返すことができる。望むのであれば、MSは、メッセージ412の中に含まれるべき実際の照準の値及び位置の値を算出できる。
【0101】
電気通信システムにおける追加のメッセージ
開示された方法及び装置の1つの実施形態にしたがって、MSは、BSからMSへ送信されたメッセージの1つの中で“全測定値送信(Send All Measurements)”(SAM)フラッグを受信する。SAMフラッグは、その信号に対してMSが相対的な到着の時間(あるいは、MSが実際の時間で到着の時間を測定できる場合には、実際の到着の時間)を測定した全ての通信信号に関する測定値を提供するはずであることを示す。従来の環境下では、MSは、MSが実行できるはずの全ての可能性のある測定値の中からMSにより受信された特定の信号の測定値を選択する。
【0102】
従来のシステムにおいて送られた測定値の数を制限する理由は、各BSからの最も早く到着する信号だけがMSの位置を計算することに割り当てられた装置に値を提供されると仮定することである。これは、MSにより受信された早く到着する信号と同じBSからMSに送信された後で到着する信号が、反射(“マルチパス信号”としても一般に呼ばれる)であると仮定されるためである。そのようなマルチパス信号は、BSからMSへの間接的な経路を取っている。BSとMSとの間の最も早い経路が最も直接的な経路であることを注意することにより理解されるように、より早く到着する信号は、最も直接的な経路を伝わっている。最も直接的な経路に沿った距離は、BSとMSとの間の距離の最も正確な表示である。したがって、BSとMSとの間のその他の直接的でない経路の測定値は、ほとんど価値がないと仮定される。その上、ある場合には、受信された信号の出力は、所望の出力しきい値の上でなければならない、又は、例え、その信号が同じソースから受信された信号の中から最も早く到着する信号であっても、MSは、その信号の測定値を報告しない。
【0103】
しかしながら、出力しきい値より下であるか又は間接経路を伝わったのいずれかである信号は、MSの位置を最終的に計算する装置への追加の情報を提供できる。したがって、ここに開示された方法及び装置は、BSがSAMフラッグを送ることを可能にし、MSがなすことができる全ての測定値を送ることにより、MSがSAMフラッグを含むメッセージに応答することを可能にする。あるいは、SAMフラッグを受信すると、MSは、全ての可能性のある測定値の下位セットを送り、その下位セットはもしSAMフラッグがMSにより受信されなければ、それ以外は送られるはずの測定値の下位セットよりも大きい。
【0104】
結論
上記の記述は、ワイアレス通信における使用のために捕捉補助情報を取得するための方法及びシステムの具体的な実施例、及び新奇な特徴を説明する。本方法及びシステムが通信システムの多数のエンティティ間での相互作用を含むことがあるので、本方法及びシステムへの複数の態様がある。本方法及びシステムの異なる態様は、例えば、元々の捕捉補助データを取得すること、そのようなデータの寿命を延長すること、以前に取得された捕捉補助データを使用して計算することにより又は周囲の変化を反映させるために以前の捕捉情報を更新することによりある種の捕捉データを取得すること、及び以前に取得された捕捉補助データの有効性を評価すること、を包含できる。一方で、ある種の提案が方法及び装置の代わりの使用及び実施を提供するが、網羅的にリストすること又はそのような代案を説明することは勿論実際的ではない。したがって、本発明の範囲は、添付された特許請求の範囲を参照することによってのみ決定されるべきであり、それ以外は、限定が添付された特許請求の範囲に列挙されるその限りであることを除いて、本明細書中に説明された特徴により制限されるべきではない。
【0105】
上記の説明が種々の実施形態に適用されたとして開示された方法及び装置の新奇な特徴を示してきているが、当業者は、説明された方法及びシステムの形式及び詳細における種々の省略、置き換え、及び変更が、本発明の範囲から逸脱せずになされること、を理解する。例えば、当業者は、広い範囲の変調技術、送信機アーキテクチャ及び受信機アーキテクチャ、並びに一般に任意の数の異なるフォーマットを有する通信システムに本明細書中に説明された詳細を適用できる。特に、任意のシステム送信機は、この開示の目的に関する基地局として機能でき、CDMA技術を利用する必要がないのみならずセルラ電気通信基地局であることさえも必要ない。任意の送信機は、SVがそのような送信機からの信号の捕捉の際に援助するために、論理的に導き出され、取得されかつ使用された捕捉補助情報を用いて本明細書中で扱われたものと同様に取り扱われることができる。
【0106】
本明細書中に上記に説明された要素の各々の実際的な組合せ及び新奇な組合せ、並びにそのような要素と同等なものの各々の実際的な組合せは、本発明の実施形態として予期される。複数のより多くの要素の組合せが、妥当に本明細書中に正確に列挙されるというよりは、本発明の実施形態としてある部分が予期されるために、本発明の範囲は、上記の記載によるというよりはむしろ添付された特許請求の範囲により正当に規定される。さらに、上記に説明された特徴の任意の実行可能な組合せは、明白にかつ正確に本明細書中に開示されてきているとして考えられるべきである。種々の請求項の要素の等価性の意味及び範囲の中から来る全ての変形は、対応する請求項の範囲内に包含される。このために、各請求項中の各記述された要素は、可能な限り広く解釈されるべきであり、さらに、しかも従来技術に包含されることなく可能な程度にそのような要素と等価な任意のものを包含するように理解されるべきである。
【符号の説明】
【0107】
102…移動局(MS),104…基地局(BS),106…BSアンテナ,108…信号,110…SVアンテナ,112…衛星本体(SV),114…MSアンテナ,118…セル,208…第1の点,210…第2の点,218…見かけのベクトル。
【技術分野】
【0001】
本出願は、2003年4月25日に出願した米国仮特許出願第60/465,371号、及び2003年4月30日に出願した米国仮特許出願第60/467,258号に優先権を主張し、これらは、本明細書中に引用文献として取り込まれている。
【0002】
開示された方法及び装置は、ワイアレス通信に係り、より具体的には、選択された信号を捕捉する際に受信局を補助するために信号捕捉補助データを使用するワイアレス・システムに関する。
【背景技術】
【0003】
ワイアレス通信工業は、ワイアレス端末に関する正確な所在地情報を発生させるサービスを開発している。この開発は、非常呼び出しに迅速に対応するための公共安全性サービス・プロバイダの努力の成果における彼らの必要性により一部が動機づけられる。多くの例では、呼び出しをする相手方は、正確な所在地情報を提供することを望まない又は提供できないことがある。そのような情報が自動的に提供される場合に、公共安全係職員は、迅速に応答でき、サービスを実行できる。一般に、その場所において公共安全性構成員が緊急‘911’電話呼び出しを受け取る場所は、公共安全性応答点(Public Safety Answering Point)(以降‘PSAP’と表す)として知られる。
【0004】
周知の全地球位置決定システム(Global Positioning System)(GPS)は、ワイアレス端末所在地決定を提供するための1つの可能性のある取り組み方を提供する。GPS技術を使用して、ワイアレス端末の所在地情報及び速度情報は、FCC報告及び命令により必要とされる精度要求の範囲内で決定されることができる。十分に正確なワイアレス端末所在地情報を提供することに加えて、一旦GPS技術がユニットに追加されると、新たなGPSの特徴は、ワイアレス電話機に容易に統合される。追加価値の特徴は、ワイアレス電話機の市場価値を増加させるために、及びそのような電話機のエンド・ユーザに追加のサービスの提供を通して収入を高めるために使用されることが可能である。
【0005】
良く知られているように、GPSナビゲーション・システムは、地球の周りの軌道上を回っている複数の衛星を使用する。GPSのいかなるユーザも、地球上のどこでも、3次元所在地、速度及び1日の時間を含む正確なナビゲーション情報を導き出せる。GSPシステムは、24個の衛星を含み、衛星は、赤道に対して55°傾斜した3つの平面で26,600キロメートルの半径を有する円形の軌道に、互いに120°の間隔で配置される。8個の衛星は、3つの軌道経路の各々の中で等間隔に配置される。GPSを使用する所在地測定は、軌道を回っている衛星からGPS受信機へGPS信号同報通信の伝播遅延時間の測定に基づく。通常、4個の衛星からの信号の受信が、4次元(緯度、経度、高さ、及び時間)の正確な所在地決定のために要求される。受信機がそれぞれの信号伝播遅延を測定した後で、各衛星への距離は、各遅延を光の速度で掛け算することにより計算される。位置及び時間は、測定された距離に取り込まれている4個の未知数と既知の衛星の位置を有する4つの方程式の組を解くことにより見出される。GSPシステムの正確な能力は、衛星の時計及び軌道パラメータを連続的にモニタし補正する追跡局(tracking station)とともに、各衛星に対して搭載されている原子時計を使用して維持される。
【0006】
各GPS衛星本体(satellite vehicle)(SV)は、L−バンドの2つの直接系列符号化されたスペクトル拡散信号:1.57542GHzのキャリア周波数のL1信号、及び1.2276GHzのL2信号、を送信する。L1信号は、位相矩象(phase quadrature)中に変調された2つの位相シフト・キーされた(phase-shift keyed)(PSK)スペクトル拡散信号:P−符号信号(Pは“正確さ”の代わりである)及びC/A−符号信号(C/Aは“粗い/捕捉”の代わりである)からなる。L2信号は、P−符号信号のみを含有する。P符号及びC/A符号は、キャリア上に変調されるビット(電気通信業者により“チップ”と呼ばれる)のそれぞれの擬似ランダム(擬似ノイズ又は“PN”とも呼ばれる)系列である。これらの符号の時計に類似の性質は、時間遅延測定を行う際に受信機によって利用される。各SVに関するPN符号は、固有であり、複数のPN符号が同じキャリア周波数において全て送信されたとしても、どの衛星が与えられた符号を送信したかを受信機が識別することを可能にする。ナビゲーション計算に有用なシステム状態情報及び衛星軌道パラメータを包含する50ビット/秒のデータ・ストリームも、各キャリア上に変調される。P−符号信号は、暗号化され、そして一般に商業的なユーザ及び私的なユーザに対して利用可能ではない。C/A信号は、全てのユーザに利用可能である。
【0007】
GPS受信機によって実行される動作は、大部分が、直接系列スペクトル拡散受信機によって実行されるものの典型例である。PNコード変調の拡散効果は、“逆拡散”として知られる処理において、時間を合わせられ(time-aligned)、ローカルに発生された符号のコピーと各信号とを掛け算するとことにより各信号から除去されなければならない。適切な時間の合わせ、すなわち符号遅延、は、受信機の始動時に知られていない可能性があるので、符号遅延は、GPS受信機動作の初期の“捕捉”フェーズの間に検索することにより決定される必要がある。
【0008】
逆拡散が実行された後で、各信号は、中間キャリア周波数で50ビット/秒のPSK信号から構成される。このPSK信号の正確な周波数は、衛星と端末ユニットとの間の相対的な動きによって生ずるドップラー効果に起因し、そしてローカル受信機のGPS時計基準時間の誤差に起因して不確定である。ドップラー周波数が通常は信号捕捉の前に未知であるために、ドップラー周波数の検索は、初期の信号捕捉の間に実行される必要がある。一旦、ドップラー周波数がほぼ決定されると、キャリア復調が行える。
【0009】
キャリア復調を実行した後で、データ・ビット・タイミングは、ビット同期化ループを使用して導出され、データ・ストリームが、最終的に検出される。一旦、4個の衛星からの信号が捕捉されかつ固定され、時間遅延及びドップラー測定値が得られると、そして(GPSタイミング基準及び軌道パラメータを決定するために十分である)十分な数のデータ・ビットが受信されると、ナビゲーション計算は、着手されることができる。
【0010】
位置決定に関するGSPシステムの1つの欠点は、信号捕捉を実行するために比較的長時間を必要とすることである。上記されたように、SV信号は、2次元検索“空間”、この次元は符号位相遅延及びドップラー周波数シフトである、において検索することによりSV信号が最初に位置決めされるまで追跡されることはできない。一般的に、もし、この検索空間の中で信号の位置の事前の知識がなければ、受信機“コールド・スタート(cold start)”の後の場合であるかのように、非常に多数の符号遅延(約2000)及びドップラー周波数(約15)が、捕捉され追跡されようとしている各SV信号に対して検索される必要がある。それゆえ、各信号に対して、検索空間において30,000個の位置まで検査される必要がある。一般的に、これらの位置は、1回に1個、連続的に検査され、処理は、5分から10分の長さかかることがある。受信しているアンテナの視野内で4個の衛星の身元(すなわち、PN符号)が未知であるならば、捕捉時間は、さらに長くなる。
【0011】
信号捕捉は、GPS受信機が信号を見失った場合に、少なくとも必要である、これは、例えば、電源を切った後で生じることがある、又は信号がある時間の期間にわたり阻止されている場合に生じることがある。信号を捕捉した後で、これらは維持される又は“追跡される”。
【0012】
しかしながら、セルラ電話機移動局(MS)のような多くの装置は、装置の基本的な目的というよりは追加の特徴又は拡張としてGPS機能性を所有する。これらの装置にとって、GPS SV信号を継続的に追跡することの必要性は、コストを増加させるはずであり、電池の寿命を減少させる、又は本来の装置の機能性(例えば、セルラ電話機として基本的に機能すること)を低減する。例えば、GPS SV信号がセルラ電話機の信号周波数とは異なる周波数で与えられるために、1個の受信機は、両方の周波数を同時にモニタできない。これを実行するために、MSは、増設の受信機ユニットを必要とするはずであり、それによって、装置のコストに追加される。さらに、システムの処理能力は、両方の信号を同時にモニタするために増加させられる必要があるはずであり、これはコストと電力消費の両方を増加させるはずである。したがって、多くのそのようなシステムは、ほとんどGPS SV信号を追跡せずに、むしろ要求に応じて必要とされる信号だけを捕捉する。
【0013】
全てのGPS能力があるシステムは、GPS SV信号の捕捉を必要とする。あるシステムは、そのような捕捉を時々必要とするだけであるが、その他のシステムは、GPS機能を要求される各回毎にGPS SV信号の捕捉を必要とする。不幸にして、信号捕捉に関する必要性は、GPS機能が緊急に必要とされることを妨げない、例えば、MSの位置が緊急事態への対応を容易にするために急いで必要とされる場合である。そのような状況では、所在地決定が取得される前に、GPS/ワイアレス端末ユニットによる5分から10分のGPS衛星信号捕捉のコールド・スタートに付随する時間遅延は、非常に好ましくない。
【0014】
この遅延を削減するために、情報は、特定の信号を捕捉する際に受信機を助けるために提供されることができる。そのような捕捉補助情報は、“符号ウィンドウ(code window)”を与えることにより、信号の位置を決定するために検索される必要がある空間を受信機が狭くすることを可能にする。符号ウィンドウは、その中で“符号位相(code phase)”(実効的に、信号到着の時間)が見出されるはずの縮小された範囲、又は信号に関係するドップラー・シフトの予測される範囲を与える。捕捉補助は、しかも、自身のPN(擬似ノイズ又は擬似ランダム)符号、周波数、変調、及び内容のような、信号に関するその他の情報も含むことができる。信号の不確定性についていのウィンドウがより狭いことは、受信機がより迅速に信号を捕捉できることである。これらのウィンドウを狭くすることは、信号のより早い捕捉を可能にする、これは位置決定が生成されることができる前の遅延を短くするだけでなく、受信機の処理負荷を削減し、これは電力消費を削減できる。システム内部の他の1つのソースから提供される情報の補助で、その中で受信機が要求によって所在地位置決定のための照準信号(raging signal)(例えば、SV GPS信号)の位置を決めるシステムは、一般に“無線補助の所在地位置決定(wireless assisted position location)”システムとして呼ばれる。
【0015】
それらの導入以来、無線補助の所在地位置決定システムは、好ましい所在地位置決定技術として人気を得てきている。これらは、与えられた信号ソースから照準信号を測定することが可能なユーザ端末が、照準信号の迅速な捕捉を容易にする情報を取得するためにデータ・ベースをアクセスできる任意のシステムに適用可能である。他のものの間で、アプリケーションの1つは、1若しくはそれより多くの基地局(base station)(BS)と通信する所在地位置決定能力があるワイアレス移動局(mobile station)(MS)による使用であり、ここで、BSは、信号捕捉補助データを提供できる1若しくはそれより多くのデータ・ベース・サーバ、これは所在地決定エンティティ(Position Determination Entity)(PDE)とも呼ばれる、に接続される。
【0016】
MSに送信された信号捕捉補助情報は、MSに対して利用可能な照準信号のタイプの説明及びこれらの信号の特徴付け、例えば、周波数、PNオフセット、期待される符号位相、等、を含む。これらのパラメータのあるものの決定は、MSの位置及び内部状態のおおよその知識に基づく。そのような捕捉補助情報のゴールは、MSが特定のSV信号の到着の時間、又は符号位相、及び適用可能であるならばSV信号のドップラー・シフト、これは一般に符号位相予測として呼ばれることができる、を予測することを可能にする。考えは、発生、伝達、及び符号位相予測情報の使用を含む。
【0017】
符号位相予測は、その計算のために入力されたパラメータと同程度の精度であるだけである。望まれている特定の信号のソースに対して相対的なMSのクロック・オフセット、所在地及び動きは、一般に正確に知られないため、予測された符号位相は、ある種の不確定性を有する。この不確定性は、予測された符号位相のまわりの不確定性ウィンドウ及び信号の予測されたドップラー・シフトのまわりの不確定性ウィンドウとして表されることができる。
【0018】
無線補助の所在地位置決定システムは、例えば、GPS機能が要求される場合に、捕捉補助情報を受信することの自身の必要性に起因する待ち時間の欠点の影響を受ける。待ち時間は、必要な信号を捕捉するために必要とされる時間だけでなく、そのエンティティに対する捕捉補助を収集し提供すること及び受信されようとしている捕捉補助のために、一般に電気通信システム内部の他の1つのエンティティから、捕捉補助情報を要求するために必要とされる時間にも起因する。その上、捕捉補助情報を伝達することは、通信システム搬送能力に負荷を与える。
【0019】
それゆえ、捕捉補助を使用して正確な符号位相予測を可能にする一方で、無線補助の所在地位置決定システム中で受信機に負荷を与える処理及び通信を削減するシステム及び方法に対するニーズがある。
【特許文献1】米国特許第6,429,815号明細書
【特許文献2】米国特許第6,353,412号明細書
【発明の概要】
【0020】
[サマリー]
本明細書中に開示されたシステム及び方法は、ユーザ端末へ捕捉補助情報を伝達するための特徴、並びにネットワーク・インフラストラクチャにおいて及びユーザ端末において捕捉補助パラメータを決定するための特徴を含む。記載されたシステム及び方法の種々の態様は、捕捉補助を使用して正確な符号位相予測を可能にする一方で、無線補助の所在地位置決定システム中で受信機に負荷を与える処理及び通信を削減するための上記に認識されたニーズに向けられる。当業者は、記述されたシステム及び方法の種々の態様がその他の利点も提供することを理解するであろう。
【0021】
1態様は、与えられた信号を捕捉する際にMSによる使用のために以前に受信した捕捉情報が未だ有効であることを決定することによって、与えられた信号を捕捉しようと試みる場合に、それによってセルラ電気通信システム中の移動局(MS)が捕捉補助情報を受信する必要性を回避する方法を含む。
【0022】
他の1態様は、それによって捕捉補助が複数の信号を捕捉するために利用されることができる方法を含む。複数のうちの第1の信号は、捕捉されることができ、第1の信号の測定値は、検索された複数のものの中の他の信号に関係する捕捉補助データを改善するために採用されることができる。
【0023】
しかも他の1態様は、移動局(MS)において信号を捕捉する方法を含む。本方法は、MSが第1の位置にいる場合に捕捉補助を取得すること、そしてそれから、別の新たな位置に移動しているMSにしたがって取得された捕捉補助データを補正することを含む。
【0024】
さらなる態様は、セルラ電気通信システムにおいてMS位置に対する変化を決定する方法を含む。本方法は、MSの位置に関係のある選択基準を満足する基地局(base station)(BS)のリストを利用する。本方法は、ある時刻においてそのようなリストに属するBSを後の時刻において“同じ”リストに属するBS(すなわち、同じ選択基準を満足するBSのリスト)と比較するステップを含む。
【図面の簡単な説明】
【0025】
【図1】図1は、移動局、サービスしている基地局、及びその信号が捕捉されようとしている衛星本体の代表的な基本配置を図示する。
【図2】図2は、複数の基地局を図示し、移動局の内部の基地局のリストが、移動局が位置を移動したという結論を引き出すために、どのように使用されるかを説明する際に使用される。
【図3】図3は、移動局により開始された所在地位置決定セッションのためのメッセージ・フローを図示する。
【図4】図4は、移動局により終了された所在地位置決定セッションのためのメッセージ・フローを図示する。
【0026】
[詳細な説明]
開示された方法及び装置の実施形態は、添付の図面に示される。図面では、同様の参照番号及び名称は、同様の要素又は類似の要素を指示する。
【0027】
本明細書中に説明されるシステム及び方法は、信号を捕捉する際に受信機を援助するために捕捉補助データを利用する、無線補助の所在地位置決定システムのようなシステムに対して適用可能である。大部分の無線補助の所在地位置決定システムは、全地球位置決定システム(global positioning system)(GPS)衛星本体(satellite vehicle)(SV)信号を捕捉すること及び利用することが可能である。上記に説明したように、現在のGPS SV信号は、CDMA電気通信信号に密接に関係するフォーマットを有する信号を送信する。したがって、本明細書中で説明される具体例のシステムは、CDMAセルラ電気通信システムに基づいている。しかしながら、いずれかの他の通信無線インターフェースが同様に使用されることができることは、当業者により理解されるであろう。
【0028】
信号捕捉位置及び照準(ranging)の両方の目的に対して、選択された通信信号のタイミングに関係する情報は、有用である。与えられた信号の認識できる特徴の到着を期待する時に、確認するために有用であり、その結果、信号の検索は、限られた時間の期間をカバーするだけが必要であり、そして、しかも、種々の信号の到着の時間を相互にできるだけ正確に決定するためにも有用である。この後者の情報は、下記に説明されるように照準目的のために使用されることができる。これらの両方のタイミングの問題は、信号の認識可能な特徴の“到着の時間(time of arrival)”を包含する。
【0029】
通信システムに関して知識のある者は、そのような到着の時間情報が信号の“符号位相(code phase)”と多くの場合に等価であること、を理解する。“符号位相”は、受信された符号と基準時刻において開始する同一符号との間の位相オフセットに関する到着した信号のタイミングを記述する。そのようにして、信号の“符号位相”を識別することは、信号の“到着の時間”を効果的に識別し、到着の時間を取得するために符号位相と信号の周波数との掛け算だけを必要とする。これら2つは、密接にかつ単純に関係するので、“到着の時間”は、“符号位相”とほぼ互換可能である。“到着の時間”の用語は、所在地決定システムにおいて、特に、通信システムの“符号”態様を共有しないシステムにおいて、しばしば使用される。
【0030】
本明細書中に説明されるシステム及び方法は、全てのワイアレス・システムにおいて容易に採用されることができる。照準目的のために捕捉される必要がある信号は、CDMA信号に限定されることなく、多くのその他のタイプを含むことができる。照準信号も、GPS SV信号に限定されることはない。例えば、基地局(BS)信号は、一般に照準のために使用され、照準信号は通信される必要がない。それにも拘らず、本明細書中で説明される具体例のシステムは、CDMA通信システムであり、“符号位相”が、そのようなシステムに関してより一般的に使用される。知識のあるものは、これらの用語の関係する本質を理解し、他の用語がより頻繁に使用されるシステムにおいてこれらの用語のうちの1つを使用して説明される概念を困難なく採用する。
【0031】
以下の記号表示が、本明細書全体を通して使用される:
・Rは、MS位置不確定性領域の半径である
・bSVは、SVクロック・バイアスである
・b^BSは、推定されたBSクロック・バイアスである
・b%BSは、BSクロック・バイアス不確定性である
・bMSは、MSクロック・バイアスである
・b^MSは、推定されたMSクロック・バイアスである
・b%MSは、MSクロック・バイアス不確定性である
・d^MSは、GPSとMSのCDMA受信チェーンとの間の推定された時間遅延差である
・d%MSは、GPSとMSのCDMA受信チェーンとの間の推定された時間遅延差の不確定性である
・Δf^MSは、推定されたMS周波数オフセットである
・Δf%MSは、推定されたMS周波数オフセットの不確定性である
・fSVは、SVドップラーである
・αは、SV仰角である
・cは、光速である
・fcは、チップ・レートである(GPS C/A符号に対して、fc=1.023MHz)
・rVBS_MSは、BSからMSに向かうベクトルである
・rVBS_SVは、BSからSVに向かうベクトルである
・rVMS_SVは、MSからSVに向かうベクトルである
現在のシステムにおいて、全地球位置決定システム(GPS)衛星本体(SV)信号に関する捕捉補助データは、移動局(MS)に提供される。この捕捉補助データを提供するための正確な手順が、例えば、TIA/EIA IS−801−1のような、種々の所在地位置決定シグナリング規格に規定されている。これらの規格の少なくともあるものは、セルラBSに関係する類似の捕捉補助情報を伝達するための方法を提供し損なう。よく知られたように、GPS SV信号以外の信号、例えば、セルラBSパイロット信号、も、照準信号ソースとして使用されることができる。現在まで、この欠点は、深刻であると見られていていない。これは、BS捕捉補助情報が、一般的にその他のワイアレス・シグナリング方法を介して、例えば、TIA/EIA IS−2000の近接者リスト・メッセージ(Neighbor List Message)の形式で、MSに提供される。しかしながら、そのような捕捉補助は、ワイアレス・ネットワークにおいて一体となったハンドオフを容易にするために調整されていて、所在地位置決定測定を容易にするためではない。したがって、既存の捕捉補助技術が最適な性能より低い性能を与えるものの、その有効性は、所在地位置決定メッセージに中に明確なBS捕捉補助を加えることにより改善されることができる。所在地位置決定メッセージ中のさらに追加の明確な捕捉補助は、無線補助の所在地位置決定システムへの他の改善の実施も容易にする。
【0032】
信号ドップラー・シフトの捕捉の補助
下記の比較的簡単な方法は、信号捕捉補助を提供するために使用されることができる。予測されたドップラー周波数が、MSにより非常に正確に知られる必要がないので、SV信号のドップラー周波数オフセットの検索は、下記の方法を使用して狭められることができる。
【0033】
予測されたドップラー,D^,は、次式として導出されることができる
D^=fSV−Δf^MS (1)
そして、ドップラー検索ウィンドウ,WD,は、次式として計算されることができる
WD=R・q1+Δf%MS (2)
ここで、q1は、位置不確定性の原因である要因である。一般的に、q1=10−3Hz/mが使用される。
【0034】
簡単な符号位相補助法
図1は、サービスしている(serving)BS(又は基地送信局BTS)104と通信しているMS102を図示する。BS104と通信するMSは、MS102がBS104の交信領域の中に位置することを意味する。サービスしているアンテナ106が、示されたようにサービスしている基地局から直接的に作動されるのであれば、(例えば、通信経路中に中継器が何もなければ)、BS104の交信領域の適切な第1の推定値は、BSアンテナ106を中心とする円である。順に、この交信領域は、移動局102の位置に関する不確定性領域と一致する。その場合には、SV112のアンテナ110と移動局102のアンテナ114との間の信号108に関する符号位相予測(すなわち、符号位相ウィンドウ中心)及び符号位相予測不確定性(すなわち、符号位相ウィンドウ・サイズ)は、米国特許第6,429,815号に記載されたもののようないずれかの適切な計算技術を使用して、幾何学的な方法により容易に決定されることが可能である。最大符号位相116は、SV112からサービスしているセル118の最も遠い点への距離に対応し、一方で最小符号位相120は、SV112に最も近いサービスしているセル118の点に対応する。
【0035】
MSは、次式として表される符号位相Pを観測する
【数1】
【0036】
予測された符号位相、P^、は、次式として表されることができる
【数2】
【0037】
そして、ウィンドウ・サイズ、W、は、次式として表されることができる
【数3】
【0038】
算出された符号位相予測パラメータ、P^及びW、は、セルラ通信シグナリングに関する既存のメッセージ・フォーマットを使用して、BSからMSに送信されることができる。実際の符号位相108を図示する図1の線は、rVMS_SVに対応することに注意する。BSアンテナ106からMSアンテナ114への信号(補助)を示している線122も、照準ベクトルrVBS_MS・rVBS_SVがBSアンテナ106からSVアンテナ110へのベクトル、これは図1に対応する線で示されていない、であることも示している。
【0039】
この簡単な方法は、MS及びSVの中のクロック・オフセット(クロック・バイアス)が既知である限り良好に機能する。SVクロック・オフセット(バイアス)は、ワイアレス・システムの所在地決定エンティティ(Position Determination Entity)(PDE)(図1に図示されず)に対して利用可能な天体暦パラメータから決定されることができる。例えば、もし、以前の良好に行われた所在地位置決定測定の間に算出された後でそれが記憶されたのであれば、MSクロック・オフセット(バイアス)も、利用可能である。しかしながら、以前に決定されたMSクロック・オフセットが、継続して有効でないことがある。MSクロック・オフセット(バイアス)が利用可能であると決定されてしまうと、データがクロック周波数誤差について情報を用いて取得されてからの時間を比較することにより、有効性をテストされることができる。もし、クロック周波数誤差が無視できることを記憶されたデータが示すのであれば、又は正確な情報が周波数誤差を補正することを可能にするのであれば、MSクロック・オフセット値は(補正されたとして)、有効であると見なされることができる。もし、MSクロック・オフセットが信頼性良く知られないのであれば、式(5)に示されたように、符号位相ウィンドウWは、追加のゼロでない余裕、b%MS(MSクロック・バイアス不確定性)だけ拡大されるはずである。CDMA規格使用における既存のメッセージ・フォーマットにしたがって、信号値は、PDEからMSに送信されるはずであり、全体の検索ウィンドウ・サイズを表す。
【0040】
拡大符号位相補助法
そこではBSがGPS時間と同期されている、IS−95、IS−2000又はIS−856のようなワイアレス・システムは、これもGPS時間にほぼ同期されているMSを有する利点を提供する。これらの場合には、MSクロック・バイアスは、BSからMSへの信号伝播遅延と組み合せられたBSシステム時間オフセットに基本的に帰すべきである。MSにより観測される符号位相Pは、下記のように表されることができる:
【数4】
【0041】
利用可能なデータの与えられたセットに関する最小符号位相ウィンドウ・サイズを生成するために使用されることができる符号位相補助パラメータ・セットが、望まれ、下記のように取得されることができる。MS位置不確定性領域内の各点に対して、式(6)にしたがって値Pを算出し、そして不確定性領域内のすべての点にわたり、P^min及びP^maxにより表されるこれらの値の最小値及び最大値を決定する。次に、符号位相補助パラメータは、以下のように算出される
P^=(P^min+P^max)/2 (7)
そして
W=P^max−P^min+fc・(b%BS+d%MS) (8)
式(8)にしたがって算出されたWは、BSからMSへの信号伝播遅延に起因するMSクロック・バイアス不確定性の成分を既に考慮していることに、注意する。したがって、追加の余裕b%BS及びd%MSは、BS及びMSのハードウェア遅延の不確定性だけを考慮する必要がある。よく校正されたMSに対して、d%MSは、しばしばゼロになると考えられることができる。SVクロック・バイアス中の不確定性も、一般的に小さく、多くの目的に対して、ゼロになると考えられることができる。
【0042】
不確定性領域内の全ての点にわたる最大値及び最小値を検索することにより最適化された捕捉補助パラメータ・セットを生成することは、計算には不都合であるが、単純化がわずかな精度の低下で使用されることができる。例えば、PがMS所在地の連続関数であるけれども、実際的な検索は、チップ長及びサンプリング分解能のような因子により有限なステップ・サイズに制限される。したがって、検索は、隣接する格子点がc/(q2・fc)だけ分離されている格子の点に限定されることができる。ここで、q2は、ほぼ選択された定数、例えば、q2=4、である。計算上の負荷を削減する他の1つのアプローチは、ニュートン反復のような反復検索アルゴリズムを採用することである。
【0043】
検索空間は、下記の観察を考慮することにより削減されることができる。最小値及び最大値、P^min及びP^maxがMS位置不確定性領域の周辺上のどこかで発生することが、示されることができる。したがって、外部の値の検索は、周辺への検索を制限することにより促進されることができる。一般に、不確定性領域は、3−Dの対象物であり、それゆえ検索は、‘表面’にわたり行われるはずであることを、注意する。
【0044】
その中では上記の方法が計算された符号位相ウィンドウ・サイズを削減するために使用されることができる1つの方式の図式的な理解は、極端な場合を考えることにより得られることができる。MSの位置から見ることによりSVがBSの後に“見られる” (一般的に低高度のSVを含む)場合に、ベクトルrVBS_MS及びrVBS_SVは、平行であるが、逆方向を向いている。符号位相不確定性は、この幾何学配置により規定される線に沿って本質的にゼロである。MSからBSへの符号位相及びMSからSVへの符号位相が正確に前後に並んで変化しなければならないので、その通りである。MSがBSからさらに遠くへ移動すると、MSクロック・バイアスは、追加の遅延だけ増加する。MSクロックのこの変化は、SV信号の実際の符号位相の増加と正確に等しく、MSの立場から遅延を相殺する。式6の後半部分を考察すると、2つのベクトルの大きさは、幾何学的に加算されて一定値になり、残りの大きさは、一定値又は重要ではない。そのようにして、観測された符号位相、P、は、MSからSVへの距離に無関係である。言い換えると、MS位置不確定性及びMSクロック・バイアス不確定性のいずれもがゼロでなくとも、符号位相ウィンドウWは、ゼロに削減される。
【0045】
Wが、その信号が検索されるSVからまっすぐに離れるBSアンテナから伸びる線に沿ってだけゼロに削減されるけれども、原理は、BSとSVとの間の線に沿って位置するものを除いて全てのMS位置に対するWの削減をもたらす。したがって、拡大符号位相補助法は、前に説明された簡単な方法に好ましく、その理由は、一般に、これがより小さな検索ウィンドウ・サイズを与えるためである。もし、そのようなその他のBSが、その信号が検索されるSVに偶然したがっているのであれば、この技術は、サービスしているBS(これがMSクロック・バイアスを決定する)以外のその他のBSに拡大されることが可能であることに、注意する。この目的のために、そのような他のBSのパイロットの測定値は、MSクロック・バイアスを相殺するために使用されることができる測定値を与える。実効的に、その他のBSは、特定のSV捕捉の目的のためにクロック・ソースとして使用されることができる。
【0046】
部分測定値を用いた推定値の改善
特定のシステムにおいて、複数のSV信号の捕捉は、同時に検索される。しかしながら、全ての所望のSV信号に対する測定は、限られたハードウェア・リソースのために、通常は同時に試みられない。たとえ、複数の信号に対する検索が同時に始められたとしても、あるSVは、その他のものよりも早く見つけられるはずである。その理由は、符号位相ウィンドウにおけるそれらの所在地が早い時期に検索されるように計画されているからである、又はこれらがより短い集積時間しか必要としないためである、若しくは両者のためである。この事実は、複数の信号を捕捉しようと検索する場合に、検索の結果既に捕捉されてしまった1又はそれより多くの信号の測定値に基づいて未だ捕捉されていない信号に対する検索ウィンドウを連続的に狭めることにより活用されることができる。
【0047】
もし、SVがほぼα=90°の仰角であり、MS及びBSの高度が既知であるならば、MSクロック・バイアスの良い近似は、1つのSV測定値を取得した後で達せられることができる。BSの高度(より厳密にはBSアンテナの高度)は、一般的に既知であり、MSの高度は、援助している補助データの高度から良く近似されることが可能であることに、注意する。頭上の衛星は、しかも、おそらくMSにより容易に見分けられる比較的強い信号を有し、したがって、SV信号のグループが検索される場合に、そのようなSVからの信号を最初に捕捉しようと努力することは有用であり得る。
【0048】
SVがほぼα=90°の仰角であるとき、次式で表される
|rVMS_SV|−|rVBS_SV|≒h^MS−hMS (9)
ここで、hMSは、MSの高度であり、h^MSは、MSの推定された高度である。(rVBS_SVにおいて、BSの高度は、推定されたMSの高度と同じに調整されることに、注意する。)しかも、BSが、P^の算出において、b^MS=0である式(4)を使用すると仮定する。次に、式(3)、(4)及び(9)から、真のMSクロック・バイアスbMSは、次のように算出されることができる
bMS=(P^−P)/fc+(hBS−hMS)/c (10)
一旦、MSクロック・バイアスが決定されると、MSクロック・バイアス不確定性値が正確に既知である限り、以前にWの中に含まれていた追加の余裕、fc・b%MSは、削除されることができる、又は少なくとも削減されることができる。したがって、残りのSV信号に対する検索時間は、削減されることが可能である。MSにおいてWにそのような連続的な減少をもたらすために、余裕b%MSは、式(5)に提案されたように全検索ウィンドウ・サイズの中に織り込まれるよりはむしろ、別々の値としてPDEからMSに送信されるべきである。これは、現在の規格によって現在規定されているように既存のメッセージ・フォーマットに対して小さな変更を要求する。
【0049】
部分的なSV測定値に基づいて、MSにおいて検索ウィンドウを連続的に削減することは、PDEにより使用されたクロック・バイアス推定値b^MSがMSにも利用可能であるならば、最も良く作用する。上記の例において、これは、b^MS=0に設定することにより実現された。b^MSの値を正確にMSへ送信することは、任意のb^MS値に対して良い解であるが、既存のシグナリング・メッセージへの別の小さな変更を必要とする。
【0050】
このように、信号のリストの部分捕捉は、符号位相推定値又は不確定性ウィンドウのMSクロック不確定性成分を削減するために使用されることができる。これは、他方で、もし(MSのような)算出しているエンティティに利用可能なデータが、MSクロック不確定性成分を正確に含むのであり、及び検索リストから既に捕捉された信号が、ほぼ真上にあるSVからである場合に、特に有用である可能性がある。他方で、MSとSVが、MSによって受信されたBSの反対側である時に、幾何学的な考慮は、低い高度であるSVにより送信されたSV信号に対するWを実質的に削減できる。上記したように、MS計算があたかもそのような測定可能なBSのパイロット信号に基づいているかのように調整されるのであれば、任意の測定可能なBSは、この目的のために使用されることができる。これらの技術に加えて、その他の適切なナビゲーション技術が、部分測定値とともに採用されることができ、引き続く信号捕捉のための捕捉補助を改善する。
【0051】
符号位相ウィンドウ・サイズの最小化
追加の捕捉情報要素
MSは、PDEのようなシステム中の別のエンティティからBSを介して予測された符号位相パラメータを単に受信するよりはむしろ、予測された符号位相パラメータを算出するようにプログラムされることができる。この目的のために、MSに提供された捕捉補助は、推定されたMSの位置に対して相対的なBS及びSVコンステレーションの配置を説明する情報要素を都合よく含むことができる。これらの情報要素のあるものは、少なくとも複数の現在の規格により規定されるBSからMSへの捕捉補助メッセージの中に含まれていない。そのような追加のデータを送信することは、補助データの一部分として正確な符号位相検索ウィンドウ・サイズ及びドップラー検索ウィンドウ・サイズ情報を省略することにより少なくとも部分的に相殺されることができ、その結果、シグナリング・オーバーヘッドへの正味の影響は、小さくなる。
【0052】
ある種のセルラ電気通信捕捉補助規格に含まれていない有用な情報要素は、いくつかのカテゴリーに分類される。以下に説明される情報要素の任意の組合せは、計算された符号位相ウィンドウ・サイズの削減を支援するために、通常の工学的な考えにしたがって、特定の実行において使用されることができる。第1のそのようなカテゴリーは、“SV信号捕捉補助情報”と名付けられ、これは受信しているMSによりサービスしているBSから受信されようとしているものである。このカテゴリーは、例えば、下記の情報を含むことができる:
1)(複数の)SV信号PRN系列識別名;
2)(複数の)SV及びMS(rVMS_SV)の推定された相対的な(複数の)所在地、これは:(a)SVとMSの推定された位置との間の距離、及び(b)MSの推定された位置から見たとして、与えられた座標系におけるSVの方位角及び高度、として記述されることができる;
3)(複数の)SVクロック・バイアス(bSV)値(しかしながら、この項は、一般に1つの粗い捕捉(C/A)チップと等価な最小検索ウィンドウ・サイズと比較して小さいために、代わりに、これは、省略される、又は、c)を用いてスケーリングした後で、SVからMSへの距離に対する補正項として使用されることができる);又は
4)推定されたMS位置から見られたとして、ドップラー周波数に関する方程式の1次導関数、2次導関数、又は高次導関数さえ含む、SVドップラー周波数情報(fSV)、ドップラー周波数は、MSが将来の時間の中に符号位相及びドップラー予測を外挿することを可能にすることを含むことができる。
【0053】
捕捉補助要求メッセージの中に有用に組み込まれることができる情報要素の第2のカテゴリーは、もし、存在しなければ、“BS信号捕捉補助情報”と名付けられる。これは、MSからサービスしているBSにより受信されるべきである。このカテゴリーの情報は、例えば、下記を含むことができる:
1)(複数の)パイロット信号PNシーケンス識別名;
2)サービスしているBS及びMS(−rVBS_MS)の推定された相対的な所在地、これは:(a)BSとMSの推定された位置との間の距離、及び(b)MSの推定された位置から見られたとして、与えられた座標系におけるBSの方位角、として記述されることができる;
3)BSクロック・バイアス(b^BS);又は
4)BSクロック・バイアス不確定性(b%BS)。
【0054】
“MS位置不確定性”は、有用な情報要素の第3のカテゴリーであり、MSの推定された位置の周囲の領域を説明する。このカテゴリーの情報の要素は、BSから受信されることができる、又はMSの内部で算出されることができる。これらの要素は、例えば、下記を含むことができる:
1)3次元(3−D)不確定性楕円体、3−D共分散行列と等価である;又は
2)垂直不確定性値を有する2次元不確定性楕円。
これらの2つの要素は、一般的に、同時にというよりはむしろ、代案において使用されるはずである。
【0055】
“推定されたMSクロック情報”は、有用な情報要素の第4のカテゴリーであり、捕捉補助要求メッセージの中に有用に組み込まれることができ、もし存在しなければ、BSからMSにより受信されることができる、又はMSの内部で算出されることができる。このカテゴリーの情報は、例えば、下記を含むことができる:
1)MSクロック・バイアス(b^MS);
2)MSクロック・バイアス不確定性(b%MS);
3)MSクロック周波数オフセット(Δf^MS);
4)MSクロック周波数オフセット不確定性(Δf%MS);又は
5)MSクロック・バイアス推定値(T0)に関する有効性の時間、これは、例えば、正確な時間又は基準数、例えば、MS中に記憶された以前の測定基準時間を参照した測定系列数、のいずれかであることができる。
【0056】
“MS較正情報”は、有用な情報要素の第5のカテゴリーであり、符号位相計算及びウィンドウ計算を容易にするために、もし存在しなければ、捕捉補助要求メッセージの中に組み込まれることができる。これらの要素は、MSの内部に記憶されることができる。このカテゴリーの情報は、例えば、下記を含むことができる:
1)GPSとMS(d^MS)中のCDMA受信チェーンとの間の推定された時間遅延差;又は
2)GPSとMS(d%MS)中のCDMA受信チェーンとの間の推定された時間遅延差の不確定性。
【0057】
本明細書中で説明する方法及び装置とともに採用されることができる情報メッセージ及びプロトコルの一例は、添付された資料A(“総合的捕捉補助メッセージ(General acquisition assistance message)”と題される)に詳細に説明されている。添付された総合的捕捉補助メッセージは、CDMA規格IS−801−Aに含まれている特定のメッセージ、フォーマット、及びプロトコルを記述し、本明細書中のさらなる教示にしたがって、改善された無線補助の所在地決定を容易にするために提案されたそのようなメッセージ、フォーマット及びプロトコルへの変更を示す。
【0058】
MSのための捕捉補助データ算出法
上記に説明されたような適切な情報を受け取った後で、MSは、本明細書中で下記に述べられる方法にしたがって、符号位相推定値及び不確定性ウィンドウを計算できる。本方法は、捕捉されようとしている又は測定されようとしている信号に関する用語“SV信号”を使用する。その理由は、これが一般的な慣行であり、幾何学的に明白であるためである。しかしながら、その捕捉が検索される任意の信号は、下記の方法において測定されようとしている1つの“SV信号”のセットに対して説明されるとして取り扱われることができる。未追跡のBS信号のような、測定されようとしているその他の信号に関する全ての手順は、下記に参照されるものと、実質的に同様である又は同一であり、その結果、当業者は、本明細書中で厳密な指示を必要とせずにそのようなその他の信号に対する計算を容易に修正できる。したがって、捕捉補助(例えば、符号位相推定値及びウィンドウ)は、BS信号のような他の信号を容易に計算でき、他の信号はその後さらに容易に捕捉されることができる。そのような他の信号は、例えば、照準決定及び位置決定に関して、複数のSV信号と同じ目的の多くを供することができ、実際に必要であればSV信号を完全に補える。
【0059】
下記は、(典型的にSV)信号のセットを捕捉するために必要な捕捉補助データを取得し更新するためにMSによって使用されることができるステップの具体例のアルゴリズムである。このアルゴリズムは、時間に敏感なデータを含む−PN符号及び信号周波数のような、時間に敏感でないパラメータも、信号捕捉のために必要であるが、これらのパラメータは、一般にこのアルゴリズムにより取り扱われない。特定の信号を捕捉するために最終的に必要とされる補助は、特定の信号に対するドップラー周波数推定値及び不確定性ウィンドウとともに、符号位相推定値(又は到着の時間推定値)、及びその推定値の周囲の不確定性ウィンドウ・サイズを含む。下記のアルゴリズムは、概してMSにより使用されるステップを示すけれども、そのステップは、その他のエンティティにより代わりに実施されることができる。MSは、一般的に“最終的な”捕捉補助データ(符号位相、ドップラー・ウィンドウ及び対応する不確定性ウィンドウ)を計算する。そのような計算は、(PDEのような)遠隔エンティティから受信された捕捉補助データ・パラメータに基づいて、同様にMS内部での演算により以前に取得されてきていることがあり得る捕捉補助データ・パラメータに基づいて、及びある場合にはMSにより行われた測定値にさらに基づいて、実施される。MSは、しかも、中間パラメータも計算でき、例えば、時間又は所在地の変化を反映させるためにこれらを再計算できる。“取得及び更新捕捉補助(obtain and update acquisition assistance)”アルゴリズムの詳細は、下記に述べられる:
1.既存の捕捉補助データに関する利用可能性及び有効性を評価する、並びに下記のように測定されようとしているSV信号のセットに関する補助データを計算する:
a.MSクロック情報が利用可能ならば、可能な限り利用可能な補正項にしたがってMSクロック周波数を計算する:
i.MSクロック周波数補正情報が利用可能ならば、クロック・バイアスに次の値、Δf^MS・(t−T0)、を加えることにより(時刻T0の)推定されたクロック・バイアスb^MSを補正する、ここで、SV測定は、時刻tにおいて行われる。
【0060】
ii.MSクロック・バイアス不確定性補正情報が利用可能ならば、Δf%MS・(t−T0)を加えることにより(時刻T0の)クロック・バイアス不確定性b%MSを補正する。
【0061】
iii.もし、ステップi又はiiにしたがった補正が実行できないならば、直接関係する量の未補正値を使用する。
【0062】
b.もし、それが便利であるならば、高い仰角のSVから始めて、その信号が第1の信号捕捉のために測定されようとしているSVのセットから1つのSVを選択する。
【0063】
c.測定されようとしているSV信号のセットのうち少なくとも第1番目に対する予測された符号位相及び検索ウィンドウ・サイズを算出するために式(4)及び(5)を使用する。
【0064】
d.測定されようとしているSV信号のセットのうち少なくとも第1番目に対する予測されたドップラー及びドップラー検索ウィンドウ・サイズを算出するために式(1)及び(2)を使用する。
【0065】
e.もし、MSクロック情報が利用できないのであれば又は現在の測定に対して有効でないのであれば、MSは、MS測定に対してCDMA基準時間を使用する。
【0066】
i.測定されようとしているSV信号のセットのうち少なくとも第1番目に対する予測された符号位相及び検索ウィンドウ・サイズを算出するために式(7)及び(8)を使用する。
【0067】
ii.測定されようとしているSV信号のセットのうち少なくとも第1番目に対する予測されたドップラー及びドップラー検索ウィンドウ・サイズを算出するために式(1)及び(2)を使用する。
【0068】
2.このアルゴリズムのステップ1で説明したように計算された補助データに基づいて、測定された符号位相値を取得するために少なくとも1つのSV信号を測定する。
【0069】
3.任意の適切なナビゲーション・アルゴリズムにしたがって測定されようとしているSV信号のセットからの1又はそれより多くの信号からの測定結果を使用して:
a.MSパラメータR,b^MS,b%MS,Δf^MS,及びΔf%MSのいくつか又は全てを再算出する;
b.オプションとして、必要に応じてその他のパラメータ、例えば、rVBS_MS、rVBS_SV,及びrVMS_SV、を再算出する。
【0070】
c.オプションとして、測定されようとしているSV信号のセットから残っている1若しくはそれより多くの未測定のSV信号に関するα及び方位角を算出する。
【0071】
4.測定されようとしているSV信号のセットの全てが、捕捉された又は測定されたかを決定する。
全てが測定されたのであれば、捕捉測定を停止し(STOP)、MS位置の算出のような、所望の引き続くステップに進む。
【0072】
もし、測定されるべきSV信号が残っているのであれば、未だ測定されていないSV信号だけを反映させるために、測定されようとしているSV信号のセットを修正し、上記に説明されたようにステップ1に戻る。
【0073】
適切なナビゲーション・アルゴリズムの例が、米国特許第6,353,412号の中に見出されることができる。
【0074】
下記は、上記に説明された方法のステップ3を説明する一例であり、MSクロック・バイアス推定値が、既知であると仮定する。SV信号に対する符号位相Pが測定されていて、MSは、SV位置上の同心の2つの球の間の空間Vの中に囲まれていると決定されることができる。球の半径は、次の式により与えられる:
c[(P+bMS+bSV)+/−(|b%MS|+|Puncertainty|)],
MS位置は、空間Vと最も妥当な以前に推定されたMS位置不確定性領域との交差部分に制限されるので、更新されることができる。交差部分が以前に推定されたMS位置不確定性領域よりも小さければ、(Pの測定値の不確定性を認めた後で)MSクロック・バイアス不確定性を削減することが可能である。MSクロック・バイアス不確定性を削減する一例として、SVがα=90°の仰角である場合を考える。この場合には、Vは、2つの水平面によりほぼ規定される。したがって、MSクロック・バイアス不確定性は、測定不確定性を認めて、高度位置の不確定性と等価である高さに削減されることができる。
【0075】
下記の例は、本方法のステップ3の第2の手段(implementation)を説明する。この手段は、MSクロック・バイアスの推定値が利用できない場合、及びMSがサービスしているBSパイロット信号から自身の時間基準を導出することが知られている場合に、使用されるはずである。MSは、SVに1つの焦点を及びサービスしているBSに他の焦点をそれぞれが有する2つの双曲面の間の空間Vに位置する。2つの双曲面の特性距離差異(characteristic distance difference)は、(cにより掛け算された)fc・(b^BS+d^MS)により補正された測定された符号位相に基づく、ここで、b^BSは、推定されたBSクロック・バイアスであり、d^MSは、GPSとMSにおけるCDMA受信チェーンとの間の推定された時間遅延差である。2つの双曲面は、測定された符号位相中の不確定性及びb^BS及びd^MS中の不確定性を反映する距離だけ離される。更新されたMS位置は、Vと以前に推定されたMS位置不確定性領域との交差部分により与えられる。交差部分が以前に推定されたMS位置不確定性領域よりも小さければ、位置不確定性は、削減されることができる。
【0076】
上に述べられたステップ3の第2の手段は、サービスしているBSの代わりに、MSにより追跡された任意の2次の信号ソースを用いた使用のために修正されることができる(その結果、そのようなソースへの符号位相測定値がMSにおいて利用可能である)。そうするために、SVに対して測定されたPは、もし、時間基準、すなわち測定値、を提供されたそのような2次のソースが2次のソース信号の相対的な到着時間だけオフセットされることができるならば、MSが使用するはずである基準時間から再計算されることができる。そのような2次のソースに関連する対応する情報を使用して、それ以外は、計算は、サービスしているBSに関して上記に説明されたように進む。
【0077】
捕捉補助データ有効性の拡大−時間の考慮
捕捉補助データの有効期間は、その期間に、補助データがMSからのBSとSVの距離を正確に記述できる時間の期間の長さとして規定されることができる。有効期間は、SV及びMSの動きの程度に依存し、BSは静止していると考えることができると仮定する。静止MSに対して、SV捕捉補助データの有効期間は、SVドップラー・シフトを記述する方程式中の高次の項に対して与えられる係数の利用可能性及び精度に応じて、30秒から1時間の範囲である。
【0078】
補助データの(可能性のある実質的な)有効期間を利用することは、信号を捕捉するために必要な時間を削減するために、及び頻繁な補助データの更新のための必要性を削減することによって通信リソースを保存するための両方に、利益をもたらす。しかしながら、補助データの効果的な利用は、MSクロック同期及びMS位置に関係する現在のシステム特性により妨害される。
【0079】
第1に、MSは、基地局のハンドオフ(又は、サービスしているBSのその他の変更)に起因して、自身の時間基準をしばしば変更する。これは、信号の減衰、トラフィックの状態、又はその他の原因からの結果であり得る。時間基準として使用されるパイロット信号に変更が生じる場合に、その信号の捕捉が検索されている(SV又はBSからの)信号の観測された符号位相は、元々の符号位相補助が役に立たなくなるほど大きな値だけオフセットされることがある。そのような場合には、MSは、適切な補助データを算出するために、新しいサービスしているBSを基準にするようにrVBS_MS値を更新することができる。
【0080】
捕捉補助データ有効性の拡大−動きの考慮
補助データの効率的な利用に対する第2の障害は、静止していないMSが以前の符号位相補助データを無効にするのに十分な距離だけ位置を変えることがあるという事実から発生する。もし、MSが捕捉補助データの受信から移動し、そしてMSが自身の新しい位置の推定値を取得できるのであれば、以前に受信されたその他の捕捉補助情報(これは未だ有効であると仮定する)に基づいて、MSは、捕捉補助データを計算するために新しい位置推定値を単に使用できる。MSは、いずれかの利用可能な都合の良い手段により新しい位置推定値を取得できる。例えば、MSは、比較的狭い所在地推定値を導出するために高度順方向リンク三角測量(Advanced Forward Link Trilateration)(AFLT)を行える。位置の推定値は、新しいサービスしているBS単独のサービスしているセクタに基づいて設定されることが可能である。サービスしているセクタ推定値は、部分的な測定値、例えば、移動局により追跡されている第2のBSへの符号位相、によりさらに制限されることがある。そのような部分的な測定値は、サービスしているセクタとサービスしているBS及び(例えば)第2のBSの焦点により規定される双曲面の周りの不確定性領域の交差部分に限定された不確定性領域を規定できる。この例では、双曲面は、サービスしているBSに関する第2のBSの相対的な符号位相により決定される特性距離を有する。不確定性値、すなわち通常の双曲面のどちらかの側の範囲は、2つのBSに関するクロック不確定性の合計、及び(cを掛け算した)各々に対する符号位相の測定値の不確定性の合計を含む。必要に応じてMS位置情報を更新することによって、多くの捕捉補助データの有効な寿命は、将来に向けて外挿する能力により課せられた時間制限まで延長されることができる。これは、上記に説明されたように、信号ソース(SV)のドップラー・シフトを説明するより方程式の高次のものに対する係数の精度及び利用可能性により制限される。
【0081】
MSが移動したかどうかを決定するために使用されることができる他の1つの技術は、“BSリスト比較”である。複数のBSは、そのリストに対して固有である基準にしたがってリスト中の構成員に対して選択される。条件が変化すると、これらの固有の基準は、更新されたリストの構成員を構成するBSの異なるセットを識別する。したがって、その用語が本明細書中で使用されるように、“同じリスト”は、矛盾のない基準及び手順により達したリストを呼び、そのようなリストの構成員は、変化している条件を反映させるために時間にわたり変化することを期待される。
【0082】
BSリストは、リスト中の構成員に対する基準がMS位置を顕著に反映するのであれば、MSの動きを決定するために適切であり得る。この目的のために適切なリストの例は、“近接者リスト(Neighbor List)”、“アクティブ・セット(Active Set)”、又はサービスしている(serving)BSを含む。その他のリストは、特に、これらの固有のリストを全く使用しない、非CDMA方法において、当然、適切であり得る。“サービスしている”BSは、サービスされているMSと主に通信しているBSである。“近接者リスト”は、サービスされているMSに対してサービスしているBSにより与えられ、比較的近くであるBSを識別するが、一般に、MSの“アクティブ・セット”の中にあるBSを含まない。“アクティブ・セット”は、MSによりアクティブに追跡される強いパイロット信号を有する(一般的に1−6)のBSのリスト又はグループである。
【0083】
BSリスト比較技術は、MS位置を再計算すべきかどうか、及び新しい位置に関する捕捉補助データを補正すべきかどうかを決定するために使用されることができる。あるいは、この技術は、現在のMS所在地に基づいて、以前の捕捉補助データ(又はその他のデータ)が未だ有効であるかどうか、又は有効でないかどうかの指標として単に使用されることができる。複数の目的のために、この技術は、MSが既存のワイアレス通信規格にしたがってMSに対して通常は利用可能にさせない任意の情報を取得することを必要としない、そのようにして、本技術は、そのような規格の中に述べられた要求の変更に関係なく実施されることができる。さらに、MSが移動したかどうかに関する決定は、捕捉情報が有効なままで残っているかどうかを決定することだけでなく、その他の位置に敏感な課題に関しても有用であり得る。例えば、実質的なMSの動きの決定は、新しい所在地位置決定セッションをトリガするある種の状況において使用されることができる。MSの動きの決定は、BS暦(BS almanac)、中継器暦、等のような位置に敏感なデータの更新もトリガできる。
【0084】
MSの可能な動きは、下記の過去の版と現在の版との間のいずれかの項目に何時でも変更があると推定されることができる。その項目は、(a)MSに対するBSの近接者リスト、(b)MSに対するBSのアクティブ・セット、又は(c)MSに対してサービスしているBSである。それゆえ、いかなる変更もなければ、何の動きも生じなかったと推定されることができる。この結果は、例えば、MS位置推定値を更新する必要性を回避でき、以前に取得された捕捉情報(又はその他のMSの所在地に敏感な情報)が有効なまま留まっていることを示すことができる。もし、この比較の組合せのある部分が変化すれば、最も単純な場合では、その有効性が問題になっているデータが、無効であると仮定される。しかしながら、既存の位置に敏感な情報の精度、及びそれゆえ有効性を危うくする(jeopardize)のに十分なMSの動きが実際に生じたかどうかを、無効であることを過度に結論することなく決定するために、より詳細な解析が必要とされることがある。
【0085】
MSが著しく移動したかどうかに関するより詳細な解析は、例えば、直接関係のあるBSリスト中のいずれかの小さな変化によりトリガされることができる。その目的ために動きが検出されようとしている目的に依存して、適切な複雑さで、解析は、簡単である、又は複雑であり得る。例えば、動きを検出する目的がローカル中継器、又はSVのリストを更新するかどうかを単に決定するためであるならば、解析は、サービスしているBSが変更されたかどうか、及びアクティブ・セットも変更されたかどうかを単に検査するように簡単である。しかしながら、E991緊急時位置決定の目的のためには、高感度の解析が望まれることがある。解析の感度及び複雑性は、通常の技術的考慮、例えば捕捉の速度に対する処理の労力をバランスさせること、にしたがって選択される。
【0086】
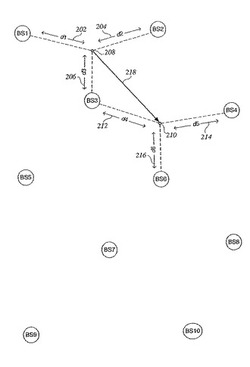
図2に示されたように、ある領域のまわりに複数のBSが設置されていると考える。この議論の目的に対して、BS1とBS10との間の距離が約10マイルであると仮定できる。特定のMSがBS2,BS3及びBS4からなるBSのアクティブ・セットを初めに有すること、及びサービスしているBSがBS3であると、さらに仮定する。BS4とBS6は、互いに比較的近くであり、MSは、どちらのBSもMSのアクティブ・セットに含まれることに同等に適しているような位置であることができる。したがって、BS4がアクティブ・セットから落とされて、一方でBS6が追加されるのであれば、除かれたBSと追加されたBSの近さは、MSの動きの結論がこの変更だけからは信頼できるように導くことができないことを意味する。それゆえ、アクティブ・セットに対してBS4を削除してBS6を追加するような小さな変更は、重要なMS位置の変化を表さないと扱われるはずである。しかしながら、リストに対するそのような小さな変更でさえも、小さな変更を示すMSの動きの弱い形跡の確証に関する1又はそれより多くの追加の指標の調査をトリガするために使用されることができる。そのような確証は、例えば、その他のリストの調査、又は照準信号データの調査から取得されることができる。
【0087】
MSのアクティブ・セットにおいてBS4に置き換わるBS6の小さな変更は、実質的な動きを示していないとして(自身によって)解釈される(interpreted)ことができる。同じ初期のアクティブ・セット(BS2,BS3及びBS4)が与えられるが、しかしながら、BS3,BS5及びBS7への変更は、サービスしているBSが同じ(BS3)に留まったとしても、著しいMSの動きが生じたことを示唆する。したがって、アクティブ・セット中でそのような変更の後で、位置情報及び捕捉補助は、それがサービスしているBSのセルより狭い位置不確定性を示すとしても、無効になると仮定されることができる。(勿論、サービスしているBSが同じままで残るのであれば、サービスしているセル境界の内部で位置を示している非常に粗い情報は、有効なまま留まることができる。)情報が無効になると見られるならば、MSにおける捕捉補助に対する必要性は、サービスしているBSからの新たな捕捉補助に関する要求を保証するはずである。
【0088】
近接者リストは、上記に説明されたアクティブ・セットの使用と同様な方法で使用されることができる。例えば、(アクティブ・セット中にBS3,BS4及びBSを有し)BS1,BS2及びBS5を含む元々の近接者リスト、そしてそれがBS5を削除しBS7を追加するように変更することは、特にBS6がサービスしているBSで留まるのであれば、実質的なMSの動きを示さないことがあり得る。しかしながら、アクティブ・セットが、BS3,BS4及びBS6を含み続けつつ、近接者リストがBS1及びBS2を削除し代わりにBS7及びBS8を追加する(したがって、BS5,BS7及びBS8だけを含む)のであれば、BS6がサービスしているBSに留まっているとしても、MSの動きは、推定されることができる。
【0089】
(サーバBS、アクティブ・セット及び近接者リストのいずれか又は全ての組合せにおける)特定の変化が実質的な動きを示唆するように取られるべきであるか否かに関する決定は、定量化されることができる。任意の適切な技術が使用されることができる実際に異なる技術が、異なる目的のために(例えば、異なるデータに関して)又は異なるBSのセット (例えば、全ての認識できるBS,アクティブ・セットBS、又はサービスしているBS) に対して使用されることができる。
【0090】
“重要な”MSの動き又はMSの動きを“危うくするデータの有効性”が生じたかどうかについての決定を定量化するために採用され得る1つの技術は、早い時刻におけるBSのリストを表している第1の点と後の時刻における同じBSのリストを表している第2の点との間の“見かけの変化”ベクトルを決定することである。もし、リスト上のBSのそれぞれまでの距離の二乗和が最小にされるようにある点が位置するのであれば、ある点は、BSの固有のリストを表すと考えられることができる。第1の点から第2の点へのベクトルは、“見かけの変化”ベクトルと呼ばれることがある。“見かけの変化”ベクトルは、任意の関係のあるBSのセット(例えば、近接者リスト、アクティブ・セット、組合せリスト、等)に対して計算されることができる。各“見かけの変化”ベクトルは、独立していると考えられる、あるいは、異なるリストから生成されたベクトルは、ベクトル的に統合される(その他の統合も、当然可能である)。結果としてのベクトルは、適切に選択されたしきい値に対して(個別に、又は統合された後で)比較されることができる。選択されたしきい値を超えている結果は、MSの実質的な、データを危うくする動きを表しているとして解釈されることができる、一方で、そのようなしきい値より下の差異は、取るに足らないとして解釈されることができる。
【0091】
“見かけの変化”を計算する簡単な一例は、再び図2を参照して説明される。時刻T0において、BSの第1のセット(アクティブ・セット)は、BS1,BS2及びBS3から構成される。後の時刻tにおいて、アクティブ・セットは、BS3,BS4及びBS6から構成される。Sum1=(d1 202)2+(d2 204)2+(d3 206)2を最小にすることによって、第1の点208は、位置を決定される。第2の点210は、Sum2=(d4 212)2+(d5 214)2+(d6 216)2を最小にすることによって位置を決定される。“見かけの変化”ベクトル218は、第1の点208と第2の点210との間に存在する。アクティブ・セット及び近接者リストのようなBSセットが相互に排他的であるならば、2つのBSが2つ異なるセットにおいて場所を交換する場合に、1つのセットの“見かけの変化”ベクトルは、他のセットの“見かけの変化”ベクトルをある程度相殺する傾向がある。重み付けは、改善として追加されることができる。適切なしきい値は、BSグループ結果が統合されるかどうかに依存する。開始しきい値は、以前の位置不確定性及び現在の位置不確定性の合計の1/6に設定されることができる。代わりのしきい値は、複数のBS間の平均距離の45%として計算されることができる。
【0092】
そのようにして、現在及び以前のサーバBS、近接者リストBS、及びアクティブ・セットBSのある種の組合せの比較に基づいてMSの動きを評価する方法は、開発されることができる。その方法は、技術的な考慮及びその他の要因に応じて、望まれるように可能な限り単純である、又は複雑であることがある。そのような考慮は、BS位置情報の利用可能性、それにより近接者リスト及びアクティブ・セットが選択される方法、及びそれに対してそのような評価が行われる課題の位置感度を含むことができる。
【0093】
選択されたMSが動いたかどうかを評価する目的のために、BSのグループへの変化は、上に述べられたように検査されることができる。しかしながら、グループは、幅広く変化することがあり、BSに制限される必要性はないが、いずれかの有用な信号ソースを含むことができる。グループ(又はリスト)中に包含するための基準がMSへの近さに主に基づくのであれば、1つのグループは、直接関係する可能性がある。種々のグループの構成員であることの変更の価値及び重要性は、そのようなグループの特有な特性に依存し、異なるグループからの結果は、その他のグループからの結果と統合される前に重み付けされる必要がある。任意のグループの名前は、無関係であり、アクティブ・セット、近接者リスト及びサービスしているBSの固有の名前は、MS位置決定に関係のあるCDMAシステムにおいて知られたグループへの便利な参照を与えるという理由だけで、本明細書中に使用される。その他のシステムでは、包含するための基準がこれらの特定のBSグループに対する基準から著しく異なる場合でさえ、異なるグループが直接関係することがあり得る。種々のグループにおいて構成員の直接の関係性と重要性との間の相違は、ケース・バイ・ケースで考慮される必要があり、重み付けは、異なる重要性又は感度のグループへの変化から導出されたMS移動の表示を統合する時に課せられる必要があり得る。
【0094】
CDMA電気通信システムにおける捕捉補助メッセージのための通話フロー
図3は、MSが所在地位置決定セッションを開始する時の、又はそれ以外は捕捉補助に関する必要性を識別する時のメッセージ・フローを説明する。そのような必要性は、例えば、ユーザがMSから位置情報を要求する場合に生じることがある。図3において、MSは、時間302の間に捕捉補助情報に関する必要性を認識する。引き続く時間304の間に、MSは、複数の動作を開始し、これは連続である必要はない。メッセージ306は、準備され、サービスしているBSへ送信される、そこでは、システム内部の所在地決定エンティティ(Position Determining Entity)(PDE)に通信されようとしている。メッセージ306は、MSの能力についてサービスしているBSに情報を提供でき、高度な位置情報を解釈する、及びローカルに位置情報パラメータを計算し、必要とされる捕捉補助パラメータに関する情報を計算する。メッセージ306は、しかも、MSの位置に関するそのような情報、MSに対して既に利用可能な情報(しかしながら、その情報は粗い可能性がある)、例えば、サービスしているBSの認識、アクティブ・セットBS及び対応するパイロット測定値のリスト、近接者リスト、CDMAオーバーヘッド・メッセージからのLAT/LONG、等、のような情報も提供できる。PDEを援助するいずれかの又は全ての情報は、送信されることができ、PDEとデータ通信していない可能性があるサービスしているBSについての情報を含む。捕捉補助を要求しているメッセージも、“総合的捕捉補助の提供(Provide General Acquisition Assistance)”と名付けられたメッセージのように、BSを介してPDEに送信される。
【0095】
捕捉補助要求メッセージ306を用意すること及び送信することに加えて、時間期間304の間に、MSは、しかも、有用である可能性のあるBS信号に関する情報を捕捉することも開始できる。これは、MSが未だ追跡していないBS信号を捕捉すること、及び有用な照準情報を提供できるBS信号を測定することを含むことができる。この時間の間に、MSは、MSがそのようなBSに関して利用可能な暦情報に加えてなされたBS測定値を使用する高度順方向リンク三角測量(AFLT)によるように、自身が有する位置情報を改善するために努力することもできる。任意のBSパイロット信号が中継器を介して到着したように見られるかどうかを決定することに有用である可能性があり、その結果、そのような信号が、適切に処理されることができ、サービスしているBSから直接送信されてきているように取り扱われないことがあることに、注意する。もし、これらの処理(task)が、捕捉補助情報がBSを介してPDEから来る前に完了するのであれば、MSは、そのような捕捉補助情報を受信する前に、MSが必要であるいずれかの信号を捕捉することを試みることが可能である。
【0096】
PDEがBSを介してMSに捕捉補助情報信号308を送信した後で、時間310の間に、PDEから与えられた捕捉補助情報にしたがって、同様にローカルなBS符号位相の測定値にしたがって捕捉補助パラメータを算出する。そのような算出に関する種々の技術が、上に述べられている。
【0097】
捕捉されようとしている少なくとも第1の信号に関する捕捉補助情報をMSが算出した後の時間312の間に、MSは、実際に信号を捕捉するために、結果としての推定された符号位相とウィンドウ、及び信号の特性を使用する。MSクロック・バイアス不確定性を削減することを可能にし、そしてその後、所望の信号のリストの一部分だけの測定値に基づいて符号位相不確定性を連続的に“狭くすること”にしたがって、引き続く信号に対して算出された捕捉ウィンドウを削減することを可能にするために、ほぼ真上にあるSVから始めることは、有利である可能性がある。この時間の間に、MSは、必要に応じて照準信号を捕捉することを一般に完了する。もしそれがMSの範囲内であるならば、MSは、自身の位置も算出できる、又はそれ以外はMSが測定する生の照準情報を解釈できる。これらの処理を完了した後で、MSは、適切な1つのエンティティ又は複数のエンティティにメッセージ314を送信して戻す。メッセージ314は、もし決定されているならば、一般に照準信号測定値及び位置の結果を含む。メッセージは、“総合的測定メッセージの提供(Provide General Measurement Message)”と名付けられた標準メッセージであり得る。
【0098】
図4は、他の1つのエンティティが所在地位置決定セッションを開始する場合の、それ以外は、MSがその信号に対して捕捉補助が必要とされる信号を検索するように管理する場合の、メッセージ・フローを説明する。そのような場合には、MSは、メッセージ402によって必要性を知らされるまでさらなるそのような所在地決定の行動を開始しない。メッセージ402は、総合的捕捉補助を提供することができる。総合的捕捉補助では、BS又はPDEは、初期の捕捉補助データ及び初期の位置情報を決定するために、自身が有する情報、例えばMSに対してサービスしているセルの位置のような情報を使用する。メッセージは、一般的に総合的測定に対する要求を含み、所在地決定に対して使用されるべき信号のリスト、その他のような、さらなる情報を含むことができる。そのようにして、MSは、メッセージ402を受信した後で時刻404において、信号を捕捉することの必要性を決定する。
【0099】
メッセージ402を受信した後で、MSは、図3に関して上記に説明したと同様に進めることができる。近接者リストのBSのような関係のあるBSの捕捉は、時間の期間406の間に行われることができるが、この時間の期間は、メッセージ402中に初期の要求とともにMSに提供されるさらなる情報のために、図3の対応する時間の期間304と比較して短くされることができる。
【0100】
MSは、有用なBSを測定した後で、時間の期間408の間に捕捉パラメータを算出するために進むことができる。これらの行動は、示された期間の間に事実上は部分的に重なることがある。時間の期間410の間に、期間408における算出から、又は要求メッセージ402から、そしてその上にMSにおいて行われた測定値から取得された捕捉補助を使用でき、関心のある信号を実際に捕捉し、測定する。捕捉が完了した後で、MSは、メッセージ412においてBSを介して要求しているエンティティに測定データを単純に送り返すことができる。望むのであれば、MSは、メッセージ412の中に含まれるべき実際の照準の値及び位置の値を算出できる。
【0101】
電気通信システムにおける追加のメッセージ
開示された方法及び装置の1つの実施形態にしたがって、MSは、BSからMSへ送信されたメッセージの1つの中で“全測定値送信(Send All Measurements)”(SAM)フラッグを受信する。SAMフラッグは、その信号に対してMSが相対的な到着の時間(あるいは、MSが実際の時間で到着の時間を測定できる場合には、実際の到着の時間)を測定した全ての通信信号に関する測定値を提供するはずであることを示す。従来の環境下では、MSは、MSが実行できるはずの全ての可能性のある測定値の中からMSにより受信された特定の信号の測定値を選択する。
【0102】
従来のシステムにおいて送られた測定値の数を制限する理由は、各BSからの最も早く到着する信号だけがMSの位置を計算することに割り当てられた装置に値を提供されると仮定することである。これは、MSにより受信された早く到着する信号と同じBSからMSに送信された後で到着する信号が、反射(“マルチパス信号”としても一般に呼ばれる)であると仮定されるためである。そのようなマルチパス信号は、BSからMSへの間接的な経路を取っている。BSとMSとの間の最も早い経路が最も直接的な経路であることを注意することにより理解されるように、より早く到着する信号は、最も直接的な経路を伝わっている。最も直接的な経路に沿った距離は、BSとMSとの間の距離の最も正確な表示である。したがって、BSとMSとの間のその他の直接的でない経路の測定値は、ほとんど価値がないと仮定される。その上、ある場合には、受信された信号の出力は、所望の出力しきい値の上でなければならない、又は、例え、その信号が同じソースから受信された信号の中から最も早く到着する信号であっても、MSは、その信号の測定値を報告しない。
【0103】
しかしながら、出力しきい値より下であるか又は間接経路を伝わったのいずれかである信号は、MSの位置を最終的に計算する装置への追加の情報を提供できる。したがって、ここに開示された方法及び装置は、BSがSAMフラッグを送ることを可能にし、MSがなすことができる全ての測定値を送ることにより、MSがSAMフラッグを含むメッセージに応答することを可能にする。あるいは、SAMフラッグを受信すると、MSは、全ての可能性のある測定値の下位セットを送り、その下位セットはもしSAMフラッグがMSにより受信されなければ、それ以外は送られるはずの測定値の下位セットよりも大きい。
【0104】
結論
上記の記述は、ワイアレス通信における使用のために捕捉補助情報を取得するための方法及びシステムの具体的な実施例、及び新奇な特徴を説明する。本方法及びシステムが通信システムの多数のエンティティ間での相互作用を含むことがあるので、本方法及びシステムへの複数の態様がある。本方法及びシステムの異なる態様は、例えば、元々の捕捉補助データを取得すること、そのようなデータの寿命を延長すること、以前に取得された捕捉補助データを使用して計算することにより又は周囲の変化を反映させるために以前の捕捉情報を更新することによりある種の捕捉データを取得すること、及び以前に取得された捕捉補助データの有効性を評価すること、を包含できる。一方で、ある種の提案が方法及び装置の代わりの使用及び実施を提供するが、網羅的にリストすること又はそのような代案を説明することは勿論実際的ではない。したがって、本発明の範囲は、添付された特許請求の範囲を参照することによってのみ決定されるべきであり、それ以外は、限定が添付された特許請求の範囲に列挙されるその限りであることを除いて、本明細書中に説明された特徴により制限されるべきではない。
【0105】
上記の説明が種々の実施形態に適用されたとして開示された方法及び装置の新奇な特徴を示してきているが、当業者は、説明された方法及びシステムの形式及び詳細における種々の省略、置き換え、及び変更が、本発明の範囲から逸脱せずになされること、を理解する。例えば、当業者は、広い範囲の変調技術、送信機アーキテクチャ及び受信機アーキテクチャ、並びに一般に任意の数の異なるフォーマットを有する通信システムに本明細書中に説明された詳細を適用できる。特に、任意のシステム送信機は、この開示の目的に関する基地局として機能でき、CDMA技術を利用する必要がないのみならずセルラ電気通信基地局であることさえも必要ない。任意の送信機は、SVがそのような送信機からの信号の捕捉の際に援助するために、論理的に導き出され、取得されかつ使用された捕捉補助情報を用いて本明細書中で扱われたものと同様に取り扱われることができる。
【0106】
本明細書中に上記に説明された要素の各々の実際的な組合せ及び新奇な組合せ、並びにそのような要素と同等なものの各々の実際的な組合せは、本発明の実施形態として予期される。複数のより多くの要素の組合せが、妥当に本明細書中に正確に列挙されるというよりは、本発明の実施形態としてある部分が予期されるために、本発明の範囲は、上記の記載によるというよりはむしろ添付された特許請求の範囲により正当に規定される。さらに、上記に説明された特徴の任意の実行可能な組合せは、明白にかつ正確に本明細書中に開示されてきているとして考えられるべきである。種々の請求項の要素の等価性の意味及び範囲の中から来る全ての変形は、対応する請求項の範囲内に包含される。このために、各請求項中の各記述された要素は、可能な限り広く解釈されるべきであり、さらに、しかも従来技術に包含されることなく可能な程度にそのような要素と等価な任意のものを包含するように理解されるべきである。
【符号の説明】
【0107】
102…移動局(MS),104…基地局(BS),106…BSアンテナ,108…信号,110…SVアンテナ,112…衛星本体(SV),114…MSアンテナ,118…セル,208…第1の点,210…第2の点,218…見かけのベクトル。
【特許請求の範囲】
【請求項1】
捕捉補助データの助けを借りて電気通信システム受信機において信号を捕捉する方法であって、該方法は下記を具備する:
a)受信機において捕捉補助データを取得すること、該受信機から遠隔したエンティティにより提供されるデータを含む;
b)捕捉補助データを取得する時間に引き続いて、受信機が特定の信号を捕捉することの必要性を決定すること;
c)特定の信号を捕捉する際に使用するために以前に取得された捕捉補助データの有効性を評価すること;及び
d)受信機クロック・バイアスの推定値に一部基づいて特定の信号の予期される到着の時間のパラメータを計算すること。
【請求項2】
前記予期される到着の時間のパラメータは、期待される値である、請求項1の方法。
【請求項3】
前記予期される到着の時間のパラメータは、期待されるウィンドウである、請求項1の方法。
【請求項4】
受信機は、セルラ電気通信システム移動局である、請求項1の方法。
【請求項5】
以前に取得された捕捉補助データから受信機に関するクロック・バイアス推定値を取得すること、及び以前に取得された捕捉補助データが今でも有効であると決定されるならば、特定の信号を捕捉するために該受信機における推定される到着の時間及び到着時間の不確定性ウィンドウを計算するために推定された受信機クロック・バイアスを使用すること、をさらに具備する、請求項4の方法。
【請求項6】
以前の捕捉補助データが取得されてから、時間のしきい量よりも多くの時間が経過したのであれば、受信機から遠隔したエンティティから新たな捕捉補助データを要求すること、をさらに具備する、請求項1の方法。
【請求項7】
前記しきいの値は、当該方程式に対して受信機が正確な係数を有するドップラー・シフトを記述している方程式の次数に依存する、請求項6の方法。
【請求項8】
前記評価することは、以前に取得された捕捉補助データの有効性を危うくする量だけ受信機が移動したかどうかを決定することを具備する、請求項1の方法。
【請求項9】
複数の信号を捕捉する必要性を決定すること;複数の信号の第1番目を捕捉すること;及び複数の信号の他の1つを捕捉するための検索ウィンドウを計算するために複数の信号のうちの第1番目の測定されたパラメータを使用すること、をさらに具備する、請求項1の方法。
【請求項10】
受信機は、セルラ電気通信システム中の移動局である、請求項1の方法。
【請求項11】
捕捉補助データが取得されてからの移動局の移動を補正するために以前に取得された捕捉補助データを修正すること、をさらに具備する、請求項10の方法。
【請求項12】
現在の近接者リストと以前の近接者リストとの間の比較に基づいて移動局が移動したことを決定すること、をさらに具備する、請求項10の方法。
【請求項13】
移動局に関して現在アクティブな基地局のセットと、移動局に関して以前アクティブであった基地局のセットとの間の比較に基づいて該移動局が移動したことを決定すること、をさらに具備する、請求項10の方法。
【請求項14】
移動局に関して現在サービスしている基地局と、移動局に関して以前サービスしていた基地局との間の比較に基づいて該移動局が移動したことを決定すること、をさらに具備する、請求項10の方法。
【請求項15】
捕捉補助データの助けを借りて電気通信システム受信機において信号を捕捉する方法であって、該方法は下記を具備する:
a)受信機において複数の信号を捕捉する必要性を決定すること;
b)受信機において複数の信号の第1番目を捕捉すること;及び
c)複数の信号の第2番目に対する捕捉補助データを計算するために複数の信号のうちの第1番目の測定されたパラメータを使用すること。
【請求項16】
受信機から遠隔したエンティティから捕捉補助データを取得すること、をさらに具備する、請求項15の方法。
【請求項17】
受信機は、電気通信システム中の移動局である、及び該移動局は、複数の信号の第2番目に対する推定される到着の時間を計算するために複数の信号のうちの捕捉された第1番目の測定されたパラメータを使用する、請求項15の方法。
【請求項18】
受信機は、電気通信システム中の移動局である、及び該移動局は、複数の信号の第2番目に対する到着の時間の不確定性ウィンドウを計算するために複数の信号のうちの捕捉された第1番目の測定されたパラメータを使用する、請求項15の方法。
【請求項19】
複数の信号を捕捉することの必要性を決定する前に遠隔エンティティから捕捉補助データを取得すること;及び複数の信号の少なくとも1つを捕捉することに際しての使用のために以前に取得した捕捉補助データの有効性を評価すること、をさらに具備する、請求項15の方法。
【請求項20】
幾つかの以前に受け取られた捕捉補助データが、該捕捉補助データを受け取った後の受信機の移動に起因して無効であることを決定すること、をさらに具備する、請求項15の方法。
【請求項21】
下記から選択された比較の組合せに基づいて移動局が移動したことを決定すること、(a)受信機の以前の近接者リストに対する、受信機の現在の近接者リスト、(b)受信機の以前アクティブであった基地局リストに対する、受信機の現在アクティブな基地局リスト、及び(c)受信機に関して以前サービスしていた基地局に対する、受信機に関して現在サービスしている基地局、をさらに具備する、請求項15の方法。
【請求項22】
以前に取得された捕捉補助データを取得した後の受信機の移動に対して、以前に取得された捕捉補助データに基づいて推定された到着の時間を補正すること、をさらに具備する、請求項17の方法。
【請求項23】
以前に取得された捕捉補助データを取得した後の受信機の移動に対して、以前に取得された捕捉補助データに基づいて計算された到着の時間の不確定性ウィンドウを補正すること、をさらに具備する、請求項17の方法。
【請求項24】
捕捉補助データの助けを借りて移動局電気通信システム受信機において信号を捕捉する方法であって、該方法は下記を具備する:
a)移動局が第1の位置である間に移動局において第1の捕捉補助データを取得すること;及び
b)異なる第2の位置における移動局による信号の検索を援助するために移動局の新たな位置に対して移動局において第1の捕捉補助データを補正すること。
【請求項25】
第1の捕捉補助データは、遠隔エンティティから取得されたデータを含み、かつ推定された到着の時間を含む、請求項24の方法。
【請求項26】
捕捉補助データから移動局クロック・バイアスを導出すること、及び移動局において推定された到着の時間を計算するために該導出された移動局クロック・バイアスを使用すること、をさらに具備する、請求項25の方法。
【請求項27】
第1の捕捉補助データは、遠隔エンティティから取得されたデータを含み、かつ到着の時間の不確定性ウィンドウを含む、請求項24の方法。
【請求項28】
捕捉補助データから移動局クロック・バイアスを導出すること、及び移動局において推定された到着の時間の不確定性ウィンドウを計算するために該導出された移動局クロック・バイアスを使用すること、をさらに具備する、請求項27の方法。
【請求項29】
特定の信号を捕捉する際に援助するために第1の捕捉補助データを使用する前に該第1の捕捉補助データの有効性を評価すること、をさらに具備する、請求項24の方法。
【請求項30】
データが取得されてから、事前に決められた時間の量より少ない時間が経過したのであれば、第1の捕捉補助データの幾つかだけを使用すること、をさらに具備する、請求項24の方法。
【請求項31】
事前に決められた時間の量の値は、当該方程式に対して受信機が正確な係数を有するドップラー・シフトを記述している方程式の次数に依存する、請求項24の方法。
【請求項32】
下記から選択された比較のいずれかの組合せに基づいて、移動局が移動したことを決定すること、(a)受信機の以前の近接者リストに対する、受信機の現在の近接者リスト、又は(b)受信機の以前アクティブであった基地局リストに対する、受信機の現在のアクティブな基地局リスト、又は(c)受信機に対して以前サービスしていた基地局に対する、受信機に関して現在サービスしている基地局、をさらに具備する、請求項24の方法。
【請求項33】
複数の信号を捕捉する必要性を決定すること;複数の信号のうちの第1番目を捕捉すること;及び複数の信号の他の1つの捕捉を援助するために複数の信号のうちの第1番目の測定されたパラメータを使用すること、をさらに具備する、請求項24の方法。
【請求項34】
セルラ電気通信システムにおいて移動局の位置に対する変化を決定する方法であって、該方法は下記を具備する:
a)第1の時刻における固有の基準にしたがって移動局に関係する基地局のリストを取得すること;
b)その後の第2の時刻における固有の基準にしたがって移動局に関係する基地局のリストを取得すること;及び
c)基地局近接者の以前のリストに対して関係する基地局の後のリストを比較すること。
【請求項35】
基地局のリストは、基地局のアクティブ・セットである、請求項34の方法。
【請求項36】
第2の基準のセットにしたがって移動局に関係する第2の基地局のセットに対してステップa),b)及びc)を実行すること、をさらに具備する、請求項34の方法。
【請求項37】
第2の基地局のセットは、近接者リストである、請求項34の方法。
【請求項38】
固有の基準にしたがって移動局に関係するセットに属する第1の基地局と後の基地局とのステップc)における比較の結果を、第2の基準にしたがってMSに関係する異なるセットに属する第1の基地局と後の基地局との比較の結果を統合すること、をさらに具備する、請求項34の方法。
【請求項1】
捕捉補助データの助けを借りて電気通信システム受信機において信号を捕捉する方法であって、該方法は下記を具備する:
a)受信機において捕捉補助データを取得すること、該受信機から遠隔したエンティティにより提供されるデータを含む;
b)捕捉補助データを取得する時間に引き続いて、受信機が特定の信号を捕捉することの必要性を決定すること;
c)特定の信号を捕捉する際に使用するために以前に取得された捕捉補助データの有効性を評価すること;及び
d)受信機クロック・バイアスの推定値に一部基づいて特定の信号の予期される到着の時間のパラメータを計算すること。
【請求項2】
前記予期される到着の時間のパラメータは、期待される値である、請求項1の方法。
【請求項3】
前記予期される到着の時間のパラメータは、期待されるウィンドウである、請求項1の方法。
【請求項4】
受信機は、セルラ電気通信システム移動局である、請求項1の方法。
【請求項5】
以前に取得された捕捉補助データから受信機に関するクロック・バイアス推定値を取得すること、及び以前に取得された捕捉補助データが今でも有効であると決定されるならば、特定の信号を捕捉するために該受信機における推定される到着の時間及び到着時間の不確定性ウィンドウを計算するために推定された受信機クロック・バイアスを使用すること、をさらに具備する、請求項4の方法。
【請求項6】
以前の捕捉補助データが取得されてから、時間のしきい量よりも多くの時間が経過したのであれば、受信機から遠隔したエンティティから新たな捕捉補助データを要求すること、をさらに具備する、請求項1の方法。
【請求項7】
前記しきいの値は、当該方程式に対して受信機が正確な係数を有するドップラー・シフトを記述している方程式の次数に依存する、請求項6の方法。
【請求項8】
前記評価することは、以前に取得された捕捉補助データの有効性を危うくする量だけ受信機が移動したかどうかを決定することを具備する、請求項1の方法。
【請求項9】
複数の信号を捕捉する必要性を決定すること;複数の信号の第1番目を捕捉すること;及び複数の信号の他の1つを捕捉するための検索ウィンドウを計算するために複数の信号のうちの第1番目の測定されたパラメータを使用すること、をさらに具備する、請求項1の方法。
【請求項10】
受信機は、セルラ電気通信システム中の移動局である、請求項1の方法。
【請求項11】
捕捉補助データが取得されてからの移動局の移動を補正するために以前に取得された捕捉補助データを修正すること、をさらに具備する、請求項10の方法。
【請求項12】
現在の近接者リストと以前の近接者リストとの間の比較に基づいて移動局が移動したことを決定すること、をさらに具備する、請求項10の方法。
【請求項13】
移動局に関して現在アクティブな基地局のセットと、移動局に関して以前アクティブであった基地局のセットとの間の比較に基づいて該移動局が移動したことを決定すること、をさらに具備する、請求項10の方法。
【請求項14】
移動局に関して現在サービスしている基地局と、移動局に関して以前サービスしていた基地局との間の比較に基づいて該移動局が移動したことを決定すること、をさらに具備する、請求項10の方法。
【請求項15】
捕捉補助データの助けを借りて電気通信システム受信機において信号を捕捉する方法であって、該方法は下記を具備する:
a)受信機において複数の信号を捕捉する必要性を決定すること;
b)受信機において複数の信号の第1番目を捕捉すること;及び
c)複数の信号の第2番目に対する捕捉補助データを計算するために複数の信号のうちの第1番目の測定されたパラメータを使用すること。
【請求項16】
受信機から遠隔したエンティティから捕捉補助データを取得すること、をさらに具備する、請求項15の方法。
【請求項17】
受信機は、電気通信システム中の移動局である、及び該移動局は、複数の信号の第2番目に対する推定される到着の時間を計算するために複数の信号のうちの捕捉された第1番目の測定されたパラメータを使用する、請求項15の方法。
【請求項18】
受信機は、電気通信システム中の移動局である、及び該移動局は、複数の信号の第2番目に対する到着の時間の不確定性ウィンドウを計算するために複数の信号のうちの捕捉された第1番目の測定されたパラメータを使用する、請求項15の方法。
【請求項19】
複数の信号を捕捉することの必要性を決定する前に遠隔エンティティから捕捉補助データを取得すること;及び複数の信号の少なくとも1つを捕捉することに際しての使用のために以前に取得した捕捉補助データの有効性を評価すること、をさらに具備する、請求項15の方法。
【請求項20】
幾つかの以前に受け取られた捕捉補助データが、該捕捉補助データを受け取った後の受信機の移動に起因して無効であることを決定すること、をさらに具備する、請求項15の方法。
【請求項21】
下記から選択された比較の組合せに基づいて移動局が移動したことを決定すること、(a)受信機の以前の近接者リストに対する、受信機の現在の近接者リスト、(b)受信機の以前アクティブであった基地局リストに対する、受信機の現在アクティブな基地局リスト、及び(c)受信機に関して以前サービスしていた基地局に対する、受信機に関して現在サービスしている基地局、をさらに具備する、請求項15の方法。
【請求項22】
以前に取得された捕捉補助データを取得した後の受信機の移動に対して、以前に取得された捕捉補助データに基づいて推定された到着の時間を補正すること、をさらに具備する、請求項17の方法。
【請求項23】
以前に取得された捕捉補助データを取得した後の受信機の移動に対して、以前に取得された捕捉補助データに基づいて計算された到着の時間の不確定性ウィンドウを補正すること、をさらに具備する、請求項17の方法。
【請求項24】
捕捉補助データの助けを借りて移動局電気通信システム受信機において信号を捕捉する方法であって、該方法は下記を具備する:
a)移動局が第1の位置である間に移動局において第1の捕捉補助データを取得すること;及び
b)異なる第2の位置における移動局による信号の検索を援助するために移動局の新たな位置に対して移動局において第1の捕捉補助データを補正すること。
【請求項25】
第1の捕捉補助データは、遠隔エンティティから取得されたデータを含み、かつ推定された到着の時間を含む、請求項24の方法。
【請求項26】
捕捉補助データから移動局クロック・バイアスを導出すること、及び移動局において推定された到着の時間を計算するために該導出された移動局クロック・バイアスを使用すること、をさらに具備する、請求項25の方法。
【請求項27】
第1の捕捉補助データは、遠隔エンティティから取得されたデータを含み、かつ到着の時間の不確定性ウィンドウを含む、請求項24の方法。
【請求項28】
捕捉補助データから移動局クロック・バイアスを導出すること、及び移動局において推定された到着の時間の不確定性ウィンドウを計算するために該導出された移動局クロック・バイアスを使用すること、をさらに具備する、請求項27の方法。
【請求項29】
特定の信号を捕捉する際に援助するために第1の捕捉補助データを使用する前に該第1の捕捉補助データの有効性を評価すること、をさらに具備する、請求項24の方法。
【請求項30】
データが取得されてから、事前に決められた時間の量より少ない時間が経過したのであれば、第1の捕捉補助データの幾つかだけを使用すること、をさらに具備する、請求項24の方法。
【請求項31】
事前に決められた時間の量の値は、当該方程式に対して受信機が正確な係数を有するドップラー・シフトを記述している方程式の次数に依存する、請求項24の方法。
【請求項32】
下記から選択された比較のいずれかの組合せに基づいて、移動局が移動したことを決定すること、(a)受信機の以前の近接者リストに対する、受信機の現在の近接者リスト、又は(b)受信機の以前アクティブであった基地局リストに対する、受信機の現在のアクティブな基地局リスト、又は(c)受信機に対して以前サービスしていた基地局に対する、受信機に関して現在サービスしている基地局、をさらに具備する、請求項24の方法。
【請求項33】
複数の信号を捕捉する必要性を決定すること;複数の信号のうちの第1番目を捕捉すること;及び複数の信号の他の1つの捕捉を援助するために複数の信号のうちの第1番目の測定されたパラメータを使用すること、をさらに具備する、請求項24の方法。
【請求項34】
セルラ電気通信システムにおいて移動局の位置に対する変化を決定する方法であって、該方法は下記を具備する:
a)第1の時刻における固有の基準にしたがって移動局に関係する基地局のリストを取得すること;
b)その後の第2の時刻における固有の基準にしたがって移動局に関係する基地局のリストを取得すること;及び
c)基地局近接者の以前のリストに対して関係する基地局の後のリストを比較すること。
【請求項35】
基地局のリストは、基地局のアクティブ・セットである、請求項34の方法。
【請求項36】
第2の基準のセットにしたがって移動局に関係する第2の基地局のセットに対してステップa),b)及びc)を実行すること、をさらに具備する、請求項34の方法。
【請求項37】
第2の基地局のセットは、近接者リストである、請求項34の方法。
【請求項38】
固有の基準にしたがって移動局に関係するセットに属する第1の基地局と後の基地局とのステップc)における比較の結果を、第2の基準にしたがってMSに関係する異なるセットに属する第1の基地局と後の基地局との比較の結果を統合すること、をさらに具備する、請求項34の方法。
【図1】

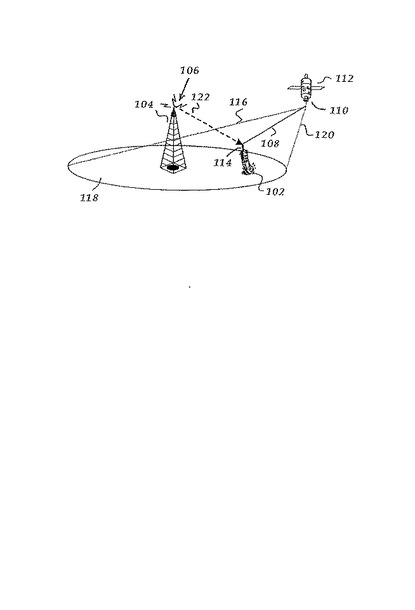
【図2】
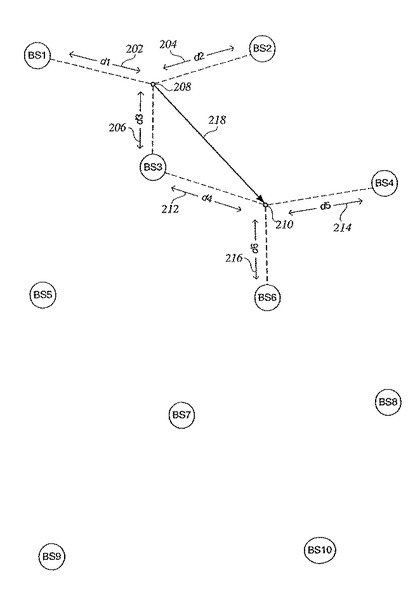
【図3】
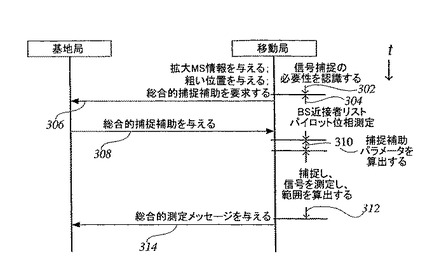
【図4】
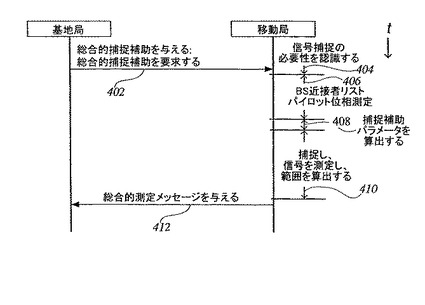
【図2】
【図3】
【図4】
【公開番号】特開2012−252015(P2012−252015A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−181124(P2012−181124)
【出願日】平成24年8月17日(2012.8.17)
【分割の表示】特願2006−509666(P2006−509666)の分割
【原出願日】平成16年4月2日(2004.4.2)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2012−181124(P2012−181124)
【出願日】平成24年8月17日(2012.8.17)
【分割の表示】特願2006−509666(P2006−509666)の分割
【原出願日】平成16年4月2日(2004.4.2)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]