
信頼度判定
この発明は、分析プロセスの品質、好ましくは信頼値Cを求めるための方法、システム、ニューラルネットワーク、およびコンピュータプログラム製品に関する。分析プロセスは、マイクロ流体装置のマイクロチャネル構造において実行され、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得される。上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納される。

【発明の詳細な説明】
【技術分野】
【0001】
この発明は、マイクロ流体システムと、分析プロセスの品質を判定するためのプロセスとに関する。
【0002】
より詳細には、この発明は、分析プロセスの品質、好ましくは信頼値Cを判定するための方法、システム、ニューラルネットワーク、およびコンピュータプログラム製品にも関する。
【背景技術】
【0003】
発明の背景
「マイクロ流体」という用語は、たとえば少なくとも1つの断面寸法が約0.1μm〜約500μmの範囲にあるような微小規模の寸法を有するチャンバおよび/またはチャネルの単体もしくはネットワークを有するシステムまたは装置を指す。取扱われる体積はナノリットルの範囲、つまり5000ηl未満、概して1000ηl未満である。マイクロ流体基板はしばしば、フォトリソグラフィ、湿式化学エッチング、射出成型、エンボス加工、および半導体業界で採用されているものと同様の他の手法を用いて作製される。結果として得られる装置を用いて、さまざまな高度の化学的および生物学的分析手法を行なうことができる。
【0004】
マイクロ流体分析システムは、従来の化学的または物理的な実験室手法をしのぐ多数の利点を有する。たとえば、マイクロ流体システムは、およそナノリットル、さらにはピコリットルのサンプルを通常使用した小さなサンプルサイズを分析するために特に良好に適合される。チャネルを規定する基板は比較的低コストで生産され、チャネルは、混合、計量配分、バルブ調整、反応、検出、電気泳動などを含む数々の分析演算を行なうよう構成可能である。マイクロ流体システムの分析能力は一般に、ネットワークチャネル、反応チャンバなどの数および複雑性を増加させることによって高められる。
【0005】
近年、流量制御、およびサンプルと支持分析構造との物理的相互作用という一般的な分野において、著しい進展があった。
【0006】
流量制御管理は、(たとえば界面動電流または電気泳動分離を誘発および/または制御するために)基板への電圧、電流、または電力のパターン化された印加を含むさまざまな機構を使用してもよい。また、これに代えて、流体流が、毛管現象引力によって、または差圧、音響エネルギなどの印加を通して機械的に誘発されてもよい。選択的な加熱、冷却、光または他の放射の照射、もしくは他の入力が、基板の周囲に分布する選択された場所で提供されて、所望の化学的および/または生物学的相互作用を促進してもよい。同様に、光または他の放射物、電気/電気化学信号、およびpHの測定値を基板から得て、分析結果を提供してもよい。これらの分野の各々において研究が進むにつれて、チャネルサイズは徐々に減少し、一方、チャネルネットワークは複雑性が高まっており、マイクロ流体システムの全体的な能力を著しく高めている。
【0007】
マイクロ流体工学技術/装置は、生物学的検定が統合されて小規模で達成されるように、微量の液体を制御および移送することができる。
【0008】
マイクロ流体工学は、生物学的な分離および検定手法を、掌の上に十分適合するほど小さい「チップ」上で多数の「実験」が達成可能となる程度にまで小さくしたものである。微量の溶媒、サンプル、および試薬がチップ上の狭いチャネルを通って攪拌され、そこで
それらは混合され、電気泳動、蛍光検出、免疫学的検定、または実際にほぼすべての伝統的な実験室方式などの手法によって分析される。
【発明の開示】
【発明が解決しようとする課題】
【0009】
今日では、多くの点で異なる多数の生成物が利用可能である。実験室チップはプラスチック、ガラス、石英またはシリコンからも作られてもよい。流体は、遠心力、機械的圧力または真空ポンプによって、慣性によって、もしくはいくつかの電気的方法のうちの1つによって駆動されてもよい。つまり、流体流は、機械弁、表面張力、電圧勾配、または電磁気力によっても、チップのまわりを迂回され得る。
【0010】
遠心力を用いて流体を駆動する手法では、スピン可能なディスクが使用される。ディスクの中には、従来のCDと同じ物理的フォーマットを有するものもあった。サンプルはディスクの内側の位置に配置され、ディスクが回転するにつれて生じる遠心力が、プラスチックに切込まれたチャネルを通してサンプルを押出し、高度の界面動電学的または機械的ポンピング構造を設計する必要性を回避する。
【0011】
以下の説明で明らかとなるように、この発明は、しばしば「ラボ・オン・チップ」と呼ばれる回転可能な、通常プラスチックのディスクに形成されたマイクロチャネルに基づくマイクロ分析システムに特に適用可能である(がそれに限定されない)。そのようなディスクは、微量の流体に対して分析および分離を行なうために使用可能である。コストを削減するには、ディスクがたった1種類の試薬または流体での使用に限定されず、さまざまな流体を扱えることが望ましい。
【0012】
さらに、サンプルの調製中、ディスクを修正せずに、ディスクによりユーザが流体またはサンプルの任意の所望の組合せの体積を計量配分できるようになることが、しばしば望ましい。回転可能なディスクに設けられた流体用のマイクロ分析装置は、たとえば、WO−0146465に記載されている。
【0013】
分析的手順はすべて、さらに他の決定のために要求される、または必要とされる情報を生成する目的で行なわれる。有用であるためには、情報はある品質目標を満たす必要がある。低品質の検定は、有用な情報を生成するためにしばしば数回の反復を必要とし、顧客にとって、実行により費用がかかる。これらは、不適切な情報に対して行なわれるプロセスおよび決定結果によって非常に異なる場合がある。
【0014】
発明の簡単な説明
とりわけ、分析プロセスは、それらがどのように設計されたかに従って機能する。しかしながら、プロセスは、サンプル組成、試薬挙動、洗浄手順などの変化によって生じ得る検定の異常挙動に敏感な場合がある。異常な結果がいかにして生じるか、およびその原因の知識を用いて、いかにしてそのようなエラーを識別し、最終結果を承認/否認する可能性を生み出すかについても学んでもよい。このように、データ生成プロセスにおける顕著な特性を評価することによって、結果が規格に従って生じたように見えるかどうかがわかる。異常に見える結果は、品質逸脱について警告されるべきである。
【0015】
不均質な検定および均質な検定双方において蛍光放射線を信号発生子として使用して、品質に関連する情報を抽出する、優れた可能性がある。不均質な検定では、粒子床のスキャンから生成された生データがある特性を満たすことが期待される。信号強度は、粒子床の上部区分でより高く、粒子床の底部で低くなるべきであり、床全体にわたって切れ目なく滑らかに変化するべきである。
【0016】
したがって、分析の正常または異常な挙動を、それがプロセス、サンプルまたは試薬によるものかどうかに関係なく示すある種の信号プロファイルを予測することが可能である。この発明の好ましい実施例の説明に関連して、正常または異常な信号プロファイルの数例を挙げる。
【0017】
マイクロ流体システムのユーザにとって、生データが「正常か否か」、許容可能か否かを立証できるようにする方法および自動システムを有することは、特に関心が高いことである。これは、粒子床にわたる信号の分布の説明を含む。正常な信号分布からの収差も、不具合の推定原因となるとして分類され得る。信頼できる結果を得るために、各個々の反応について品質の目安を作り出す手順が提案される。ユーザの観点からは、そのような情報は、反復されるサンプルの分析を信頼できる単一のサンプルへと減らす手助けをする。このように、プロセスの品質が高まると、分析にかかるコストが下がる。
【0018】
信頼値とはデータ信頼性の目安であり、ある結果が予想された完全な結果にどの程度近いかについての評価、たとえば、各列での信号分布が予想されたものにどの程度近いかについての評価である。分析プロセスについての高い信頼値は、高品質、および信頼性があるデータ結果を示す。これに対し、低い信頼値は、低品質、およびある特定のプロセスからのデータがプロセス中の1つ以上の妨害に依存して許容可能ではないかもしれないということを示す。プロセス中に起こり得る欠陥および問題に依存する妨害は、図4〜15においてより詳細に説明する。
【0019】
この発明の一般的な一目的は、マイクロ流体システムの性能を高めることである。
【0020】
この発明の別の目的は、結果が規格に従って生じたように見えるかどうかを分析可能なデータ生成プロセスにおける顕著な特性を評価するための方法、コンピュータプログラム製品、ニューラルネットワークおよびシステムを提供することである。
【0021】
この発明のより特定的な目的は、マイクロ流体装置およびマイクロ流体システムにおいて、プロセスの品質を判定するための、特にプロセスの信頼値を求めるための強力なツールを提供することである。
【0022】
また、この発明の一目的は、不均質な検定および均質な検定双方において蛍光放射線を信号生成子として使用して、品質に関連する情報を抽出する、優れた能力を提供することである。
【0023】
さらに別の一目的は、検定を分析するための自動方法およびシステムを提供することであり、この方法およびシステムは、実験室プロセスを最初から実施および実行し、プロセスの結果を分析し、プロセスおよび分析の結果を提示し、各検定について少なくとも1つの品質値、たとえば信頼値を提示する。
【課題を解決するための手段】
【0024】
この発明は、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値Cを求めるための方法であって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、上記方法は、信頼値(C)を求めるために、取得されたデータ情報をデータ処理するステップを含むことを特徴とする、方法を提供する。
【0025】
発明された方法の変形は、従属方法クレームおよび詳細な説明に含まれている。
【0026】
この発明の一局面によれば、データ処理中、信頼値(C)を求めるために、取得されたデータ情報のすべてまたは一部を用いて、少なくとも1つの特性パラメータ値が求められ、および/または計算される。
【0027】
この発明の別の局面によれば、データ処理中、取得されたデータ情報のすべてまたは一部を用いて、少なくとも1つの特性パラメータ値が求められ、および/または計算され、上記少なくとも1つの特性パラメータ値は、信頼値(C)を求めるための分類子への入力として使用される。
【0028】
この発明のさらに別の局面によれば、データ処理中、取得されたデータ情報のすべてまたは一部を用いて、少なくとも1つの特性パラメータ値が求められ、および/または計算され、上記少なくとも1つの特性パラメータ値は、信頼値(C)を求めるための分類子への入力として使用され、上記分類子はニューラルネットワークである。
【0029】
この発明はまた、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値を求めるためのシステムであって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、上記システムは、信頼値を求めるために、取得されたデータ情報をデータ処理するための手段をさらに含むことを特徴とする、システムも提供する。
【0030】
発明されたシステムの異なる実施例は、従属システムクレームおよび詳細な説明に含まれている。
【0031】
さらに、この発明は、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値を求めるためのコンピュータプログラム製品であって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、上記コンピュータプログラム製品は、コンピュータ読取可能および実行可能プログラムコード手段が内部に設けられたコンピュータ読取可能記憶媒体を含み、コンピュータ読取可能プログラムコード手段は、信頼値を求めるために、画像において取得されたデータ情報をデータ処理するためのコンピュータ読取可能プログラムコード手段を含むことを特徴とする、コンピュータプログラム製品を提供する。
【0032】
発明されたコンピュータプログラム製品の異なる実施例は、従属コンピュータプログラム製品クレームおよび詳細な説明に含まれている。
【0033】
加えて、この発明は、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値を求めるためのニューラルネットワークであって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、上記ニューラルネットワークは、請求項1〜10に記載の方法ステップの各々を行なうための手段をさらに含むことを特徴とする、ニューラルネットワークを提供する。
【発明の効果】
【0034】
この発明での一利点は、信頼できる結果を得るために各個々の反応について品質の目安を自動的に生成し、提示することである。ユーザの観点からは、そのような情報は、反復されるサンプルの分析を信頼できる単一のサンプルへと減らす手助けをする。このように、プロセスの品質が高まると、分析にかかるコストが下がる。
【0035】
さらに、この発明の一利点は、マイクロ流体システムの性能向上である。
【0036】
別の利点は、この発明が、マイクロ流体装置およびマイクロ流体システムにおいて、プロセスの品質を判定するための、特にプロセスの信頼値を求めるための強力なツールを提供することである。
【発明を実施するための最良の形態】
【0037】
この発明のより完全な理解のために、ここで、以下の説明を添付図面とともに参照する。
【0038】
発明の詳細な説明
この発明の範囲および精神から逸脱することなく、この出願に開示された発明にさまざまな実施例および修正がなされ得ることは、当業者には容易に明らかである。
【0039】
ここに使用されるように、“a”または“an”という単語は、文中および/または明細書中の「含む」という用語とともに使用する場合、「1つの」という意味を有するが、「1つ以上の」、「少なくとも1つの」、および「1つまたは2つ以上の」という意味とも合致する。ここに使用されるように、「回転する」という用語は、スピンするという意味を有する。さらに、「回転する」という用語は、ディスクの段階的回転も含んでいてもよいが、それに限定されない。
【0040】
ここに使用されるように、「試薬」という用語は、分析物を含むが、それに限定されない。
【0041】
ここに使用されるように、「円形に」という用語は、ディスクの中心のまわり(円周方向)を意味する。
【0042】
「複数のマイクロチャネル構造」という用語は、2つ、3つ、またはそれを越えるマイクロチャネル構造を意味する。通常、「複数」という用語は、≧10、たとえば≧50または≧100のマイクロチャネル構造を意味する。
【0043】
「ノイズ除去」および「ノイズ削減」という用語は、測定されたデータ(値)におけるノイズの寄与がゼロに削減されているか、または取るに足りないことを意味する。「減少」および「除去」という単語は文中交互に使用されるが、この明細書ではこの2つの単語の意味に違いはない。それらは同等であると見なされるべきである。
【0044】
マイクロ流体実験室システムは、ディスクに加え、制御ユニットとマイクロ流体機器とを含んでいてもよい。そのようなシステムはスタンドアロンシステムと呼ばれる。各システムはそれ自体のデータを有し、完全にスタンドアロンで作動する。システムとの相互作用は、関連するパーソナルコンピュータ(PC)で行なわれてもよい。
【0045】
別のシステムは、機器群に共通永続的格納先、たとえばデータベースを加えたものとして考えられ得る。多くの機器が、同じ一組のデータ(方法データ、マイクロ流体装置データなど)に対して作動可能である。システムとの相互作用はすべて、機器に接続されたコ
ンピュータで行なわれる必要がある。この第2のシステムはしばしば、分散型データベース解決策と呼ばれる。
【0046】
第3の解決策、分散型解決策では、システムは、機器群、共通永続的格納先(データベース)、および多数のクライアントとして考えられる。この解決策により、上述の分散型データベース解決策と同じ機能性に達する。加えて、機器に接続されていないコンピュータから、システムと相互作用する可能性がある。追加で提供される機能性の例を以下に挙げる。
・機器の遠隔監視。
・機器に特有ではない機能の実行(方法開発、処理データの評価など)。
【0047】
この第3の解決策により、処理を遠隔から、つまり機器に接続されていないコンピュータから制御(開始、休止、中止)することが可能である。
【0048】
オペレータ/ユーザは、制御ユニットから、マイクロ流体機器の性能を制御および監視できる。マイクロ流体機器は多数の異なるステーションを含み、各ステーションは、1つまたは多数の規定された動作を実行可能である。異なるタイプのマイクロ流体機器は、異なる種類または数のステーションからなる。したがって、動作の中には、あるタイプのマイクロ流体機器に対して提供されない、または適用できないものもある。
【0049】
動作は制御ユニットから開始される。
【0050】
図1は、制御ユニット110と機器120とを含むマイクロ流体システム100を概略的に示すブロック図であり、機器120は、サンプルおよび試薬ステーション130、洗浄ステーション140、液体移送ステーション150、マイクロ流体装置内での液体の移送を実現するための少なくとも1つのステーション160(たとえばスピナーステーション)、および検出器ステーション170を含む。
【0051】
制御ユニット110は、機器外の1つ以上のコンピュータ、および/または機器内の1つ以上の中央プロセッサ、特化コンピュータ、サーバ、パーソナルコンピュータ、デジタルプロセッサ、中央処理ユニットなどであってもよい。制御ユニットは、機器120およびその異なるステーションに、導体またはデータバス180を介して接続され、動作命令が、電気信号または光信号として送信されるか、もしくは、ステーション間で配信されるハードウェア回路への好適な予め定められたプロトコルに含まれる。
【0052】
サンプルおよび試薬ステーション130は、サンプル、試薬または他の液体を格納するための手段を含む。上記サンプル、試薬または他の液体は、ある種の容器、たとえばマイクロプレートまたはマルチウェルプレート、試験管立て、もしくは試験管に格納される。上記プレートは、小さな容器またはウェルの行列として設計されてもよい。上記プレートは、ウェルの数に依存して異なるサイズを有し得る。容器は、容器ホルダ、たとえば円形回転プレートであるいわゆるカルーセルに緩く固定されてもよい。
【0053】
液体移送ステーション150は、一度に少なくとも1つのサンプルまたは任意の他の予め定められた液体アリコートを、サンプルおよび試薬ステーション130から、たとえばスピン可能なディスクの形をしたマイクロ流体装置へ移送するロボット150aを有する。このステーションは、液体サンプルおよび他の液体の移送のための手段を有し、たとえば、シリンジポンプに接続された多数の注射針、または多数の硬いピンがサンプルの移送に使用されてもよい。上記針およびピンは、双方向において異なるチップ間距離を有する異なる数の行および列で構成されてもよい。別の代替例は、WO−9701085に記載されたマイクロディスペンサである。
【0054】
上記針およびピンは、サンプルおよび試薬の移送の合い間に洗浄溶液で洗浄されてもされなくてもよい。洗浄は、洗浄ステーション140に配置された手段によって行なわれる。
【0055】
マイクロ流体装置に計量配分された液体は、液体移送を実現するためのステーション160に関連する手段によって、装置内で運ばれる。このステーションは、マイクロ流体装置がスピンにより生じる液体搬送を可能にするようになっている場合、スピナーステーションであってもよい。マイクロ流体装置内で実行されたプロセスの結果は、検出器ステーション170に位置する検出用手段(検出器)によって判定される。
【0056】
円形のディスクに適合されたマイクロチャネル構造(301a、b、cなど)の一設計を図2に示す。これらの構造は、共通分布チャネル(302)および共通廃棄物チャネル(303)によってともに連結されている。共通対称軸のまわりのマイクロチャネル構造の向きは明らかである。ディスクの円周(304)は定位置マーク(305)を有する。組合された反応/検出マイクロキャビティまたはマイクロチャンバ(306a、b、cなど)の各々は、下流方向では共通廃棄物チャネル(303)と、上流方向では別個の連結部を介して共通分布チャネル(302)および別個の体積測定ユニット(307a、b、cなど)と連通している。検出区域(317a、b、cなど)が、各検出マイクロキャビティと関連付けられている。共通分布チャネル(302)は、その端の一方および中間位置で、注入ポート(それぞれ308および309)を所持している。別の種類の注入ポート(310)が、各体積測定ユニット(307a、b、cなど)に位置する。各マイクロチャネル構造(301a、b、cなど)はまた、共通廃棄物チャネル(303)への出口、および、共通分布チャネル(302)の残りの端での放出ポート(318)も有する。周囲空気への吸気口(311)が、共通通気チャネル(312)を介して共通分布チャネルに接続されている。周期空気への他の通気口(313および314)が、共通廃棄物チャネル(303)に、および、各反応/検出マイクロキャビティ(306a、b、cなど)と共通廃棄物チャネル(303)との間の接続マイクロダクトに配置されている。適切なバルブが、各マイクロチャネル構造(301a、b、cなど)の315および316に位置付けられている。
【0057】
図1に示すように、上記ステーションの各々は、制御ユニット110に接続され、多数の動作によって制御ユニット110から制御および監視される。ソフトウェア動作は、以下のようなある機能を達成するために行なわれるハードウェア命令の論理グループとして規定される。
・液体の搬送を実現する。たとえば、装置がスピン可能なディスクの形をしている場合、液体流を誘発するために装置をスピンさせる。
・サンプルを、特定の共通分布チャネルまたは特定のマイクロ構造に移送する。
・試薬を、特定の共通分布チャネルまたは特定のマイクロ構造に移送する。
・マイクロ流体装置を位置付ける。
・液体を、特定の時間、マイクロ構造のある位置で培養する。
・検出する。つまりマイクロ流体装置で実行された方法の結果を検出する。
【0058】
動作は多数のステップからなり得る。1つのステップは、たとえばスピン動作におけるランプといった、分割できない命令である。1つの組は、多数のこれらの動作を所望の順序でまとめることによって構成される。そのような1組は方法として規定され、機器内で行なわれるすべての部分を制御する。それは、マイクロ流体装置のタイプを指示し、1組の作用、動作を規定する。それは、たとえば、方法が細胞培養に関する場合、一定温度での培養といった機器外でのステップの実行のために、停止を指示してもよい。
【0059】
上述のように、制御ユニットは、マイクロ流体装置におけるサンプル調製、液体処理、さまざまな化学的および生化学的ステップなどを含むさまざまなプロセスを開始、実行、制御および停止することができる。さらに、制御ユニットは、マイクロ流体装置のスキャニング、分析結果についての検出、検出された結果のデジタルデータ情報への変換、およびデータ情報のデータ記憶装置への格納を開始、実行、制御および停止することができる。
【0060】
マイクロ流体装置のマイクロチャネル構造において分析プロセスを実行するためのマイクロ流体実験室システムの動作は、以下のステップを含んでいてもよい:
・分析プロセスを実行する;
・信号データについて、マイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって、分析プロセスのデータ情報を取得する;
・上記取得されたデータ情報を、多数の次元を含む画像として、スキャンされた各サーチ区域につき1画像を格納する。
【0061】
物質の生データ画像の生成および処理
粒子床の使用により検出可能なアルゴリズム、またはむしろ自動化された方法を、以下に提示する。このアルゴリズムは、スキャンされた当該各サーチ区域/検出区域/粒子床について開始されてもよい。
【0062】
ここでこの発明を、コンパクトディスク(CD)と同等のディスクフォーマットで、ディスク平面に垂直な対称軸を有し、かつ、粒子床を含む検出マイクロキャビティの各々の対称軸から半径流方向を有するマイクロ流体装置(図2参照)を含むある特定の例に関して、さらに詳述する。この種のマイクロ流体装置を以下にCDと呼ぶ。検出および測定された信号は、抗体蛍光色素共役(抗体−蛍光色素)からの蛍光であってもよい。各床は、ディスクの表面における検出区域を規定する。たとえばWO−02075312(ジャイロスAB(Gyros AB))を参照されたい。検出区域は、検出区域のまわりに規定された小さいゾーンも含むサーチ区域の一部である。この例に概説する原理は、他の装置にも適合され得る。この原理はまた、この文章の別の場所で述べるような他の種類の放射にも適用可能である。
【0063】
物質の生データ画像の生成
制御ユニットは、スキャニングおよび検出を制御するようプログラムされている。
【0064】
各サーチ区域は、放射能により生じる放射線、蛍光、化学発光、生物発光、酵素活性、光の散乱、光の吸収、光の反射といった、マイクロキャビティに存在する物質に由来する検出可能な物理的構造を検出できる検出器ヘッドによってスキャンされる。測定されたデータは、処理ユニットに接続された、または接続可能なデータストレージ、画像データストレージに格納され、処理ユニットはコントローラ手段に含まれても、または、別の可能な実施例でのように別個のコンピュータシステムに取入れられてもよい。各サーチ区域は、アドレスとして使用され得る識別子によって識別される。識別子は、システムおよびコントローラ手段が、CD上の単一の各サーチ区域およびその検出区域の場所を突止め、画像ストレージ内の対応する格納された測定データをリンクさせるようにする。
【0065】
ここで図3Aおよび図3Bを参照すると、各サーチ区域402は、予め規定された半径方向開始位置Xstart、予め規定された角度開始位置Ystart、予め規定された角度停止位置Ystop、および予め規定された半径方向停止位置Xstopを有する。データ収集の開始は、ある位置で、主として意図された検出区域の前にある角度および/または半径方向位置で始まり、同じ検出区域の後の位置で収集を終了する。サーチ区域はしたがって、検出区域404を包囲する外側区域406をカバーする。サーチ区域402は検出器によって、ディ
スクラップごとに半径方向にスキャンされる。半径方向開始位置Xstartは、サーチ区域のスキャニングが始まるとスピン開始位置Spinstart(図示せず)からカウントされるディスクラップ/回転の数であり、半径方向停止位置は、サーチ区域の最後の角度スキャニングが行なわれるとスピン開始位置からカウントされるラップの数である。角度方向におけるサーチ区域のスキャニングは、半径方向の開始位置によって規定されるラップ中に、角度方向における角度開始位置において開始し,当該角度方向は、上記ディスクのスピン方向と、上記CD上の定位置マークに対する検出器の位置とによって規定される。角度方向でのスキャニングは、角度停止位置で停止される。
【0066】
図3Aは、回転可能な装置のサーチ区域が通常、a)外側位置からCDの中心へと内側へ向かう際若干狭くなり、b)若干アーチ型である、という意味で概略的である。たとえば、各ラップについてのYstart位置が常に同じ角度位置にある(Ystop位置にも当てはまる)ことを比較されたい。
【0067】
ラップ中、角度開始位置から角度停止位置へ、サーチ区域からの収集データの流れは、ストレージに格納される測定データの対応する流れを生成する。これはラップごとに、半径方向開始値から半径方向停止値へと繰返される。コントローラ120の処理ユニットは、測定データを正しい識別された検出区域にリンクし、異なるサーチおよび/または検出区域からの測定値が混ざることはない。スキャンされた各サーチ区域は、対応する一組の収集された測定データを有する。処理ユニットはデータをそのような順序で、測定データの各組において位置ごとに編成する。したがって、画像プロセッサは、その組におけるある測定値の場所を突止めることができる。一組の測定値はしたがって、電子的に、および/またはデジタルで格納された画像に対して類似性を有する。画像は、画素と呼ばれる非常に小さい要素で規定される。各画素は、サーチ区域における測定区域の位置に対応している。
【0068】
スキャニング、検出および格納が終了すると、サーチ区域の測定データは、処理ユニットにより使用されるプリンタ/プロッタソフトウェアプログラムの使用により、三次元の図にプロット可能であり、ここで水平面は2つの次元xとyとによって、この場合、半径方向x軸とx軸に垂直な角度方向y軸とによって規定される。正のx方向は、検出区域404の入口408からその出口へと検出区域を通る主流方向(下流)として規定される。正のy方向は、半径(または流れ方向)に直交する/垂直なスキャニング方向として規定される。x軸およびy軸によって規定される水平面に垂直な第3の次元、z軸は、たとえば蛍光強度の測定値といった測定値の大きさである。測定データは、山と谷とを有する測定データの表面を規定する。上述のように、三次元の図は、各画素について規定される強度値を有する画像と本質的類似性を有しており、測定データの表面はしたがって、測定された信号をもたらす物質を含むサーチ区域/検出区域/粒子床の画像と呼ばれる。この出願の説明では、画像とは、サーチ区域/検出区域/粒子床に属する、格納された検出器測定データである。画素はここでは、サーチ区域/検出区域内の離散的測定区域として規定され、各画素は測定された強度値、画素値を有していてもよい。画像の解像度は、サーチ区域内のy方向での離散的測定点の数とx方向でのラップの数とに依存している。解像度は、測定点およびスキャニングラップの密度が増加するにつれて増加し、その結果、1つの画素の区域は減少する。電磁放射源がレーザである場合、可能な最小画素区域は、サーチ区域を有するレーザビームの最小断面によって限定される。
【0069】
サーチ区域のスキャニング中、画素強度は検出プロセスによって判定され、サーチ区域の生データ画像を表わすデジタル画素データとして格納される。
【0070】
サーチ区域/検出区域についての測定データの表面と基準面との間の、基準面の2つの軸によって規定される空間は、体積を構成する。この体積の全部または一部が、化学的プ
ロセスに対して望まれる目安、すなわち反応変数を表わしてもよい。この値は、数学的方法、たとえば検出区域の全区域、または統合区域とも呼ばれる1つのサブ区域410(図3A)、もしくは検出区域の多数のサブ区域にわたった測定データの加算または積分を用いることによって計算できる。時として、目的は、検出区域内部の、ここに正規化区域と呼ばれるサブ区域についての分量、すなわち画素の予め規定された分量を計算することである。これは、検出された構造間の差異を最小限に抑えるために行なわれる。この差異はとりわけ、検出区域からの蛍光などのバックグラウンド放射に依存する。
【0071】
図3Bは、詳細が図3Aと同様で、唯一の違いは、図3Bがいくつかの計算で使用されるサブ区域A1、A2およびA3の位置を示していることであり、この説明でそれを以下にさらに説明する。
【0072】
検出表面の理想的な画像では、区域は、検出器からの測定された生データ信号にノイズのあるバックグラウンドの寄与がないために、滑らかである。この画像は、物質信号からの測定データ、すなわち検出および測定された生のデータ信号への物質の寄与のみを含んでいる。実際には、物質の生データ画像は、測定された物質データおよびノイズデータを含む。ノイズは表面にノイズピークに似たでこぼこをもたらし、明らかに、1つまたは多くのノイズピークを有する区域における体積の計算は、化学的プロセスに対する真の目安をもたらさない。
【0073】
したがって、目安の計算前に物質の生データ画像におけるノイズの寄与をできるだけ減らすことが、時として必要である。
【0074】
物質の生データ画像における物質生データ情報からノイズを除去するための方法は、以前にWO−03056517から公知である。各画像は、検出マイクロチャンバとも呼ばれる1つの検出マイクロキャビティに、かつ、マイクロ流体装置のマイクロ流体構造の検出マイクロキャビティに存在する1つの物質に関連付けられている。物質生データ情報は、検出マイクロキャビティに関連付けられた検出区域に関連するサーチ区域をスキャン可能な検出器構成の使用によって取得される。この検出器構成は、サーチ区域から放射を発する、たとえば蛍光、発光といった上述の多数の検出可能な物理的構造のうちの少なくとも1つを検出し、検出可能な作用の大きさに比例する出力を生成することができる。この出力は、組となった物質生データとしてデータストレージに格納可能な測定データに変換される。この方法は、物質の生データ画像において異なるノイズ信号の寄与を任意の順序で段階的に除去するための以下のステップを任意の順序で含んでいてもよい:
・バックグラウンド放射を減少させる(ステップα);
・ピーク妨害を減少させる(ステップβ);
・サーチ区域内の検出区域の位置を突止める(ステップχ);
・バイナリ人工産物を除去する(ステップδ);
・検出区域の不要な区域を除去する(ステップε);
・ノイズのある画像にデフォルト検出区域を適用する(ステップφ)。
【0075】
ステップα〜φの各々は多数のサブステップを含む。ステップα〜φは1つのアルゴリズムとして見なされてもよいが、ステップα〜φのすべてが全画像について行なわれる必要はない。ステップの順序および種類は通常予め選択され、とりわけ、各個々のステップにおいて必要とされる感度および精度に依存する。一般に、高い感度が望まれる場合には、より多くのステップを含むことが必要とされる。
【0076】
バックグラウンド処理済画像はステップの結果であり、それをここにより詳細に提示する。
【0077】
ステップα:バックグラウンド放射を減少させ、バックグラウンド処理済画像を構築する。
【0078】
この目的は、画像に見え得る電子ノイズ、光ノイズ、およびダストノイズを除去することである。この方法は主として2つの変形を含む。
【0079】
第1の変形では、バックグラウンド放射画像が使用される。以下のステップが使用され得る:
・利用可能であれば、バックグラウンド放射画像にアクセスし、利用可能でなければ、バックグラウンド放射画像を生成する(ステップα′1);
・利用可能であれば、対応する物質の生データ画像にアクセスし、利用可能でなければ、物質の生データ画像を生成する(ステップα′2);
・2つの画像を相関させ、相関画像を生成する(ステップα′3);
・最大画素値の位置を特定する(ステップα′4);
・画像を正しく位置付け、対応する画素値を減算し、生成されたバックグラウンド処理済画像を格納する(ステップα′5)。
【0080】
この第1の変形をここでより詳細に説明する。
【0081】
第1の変形では、第1のステップ、ステップα′1は、たとえば、物質の分量を判定するための方法のステップb)の前に、ディスクをスキャンし、検出区域から測定信号を生じさせる物質の存在なしで放射、たとえば蛍光の強度を測定して、ディスクの検出区域/粒子床がたとえば抗体−蛍光色素で処理される前に、放射に関連する物質を保つことである。サーチ区域/検出区域はすべてスキャンされ、測定データの対応する組の各々がバックグラウンド放射画像に格納される。抗体−蛍光色素を用いる場合、対応する画像はバックグラウンド蛍光画像と呼ばれる。この画像は、バックグラウンド放射ノイズ信号および他のノイズ信号の測定データを含む。好ましい変形では、バックグラウンド放射画像についてのスキャニングは、放射をもたらす物質が検出マイクロキャビティに形成される、および/または保たれるステップのできるだけ近くで実行される。好ましくはないものの、製造業者は、たとえば同じ種類の多くのCDの平均に基づいたバックグラウンド放射画像を提供してもよい。
【0082】
第2のステップ、ステップα′2は、この第1の変形では、上述の物質の分量を判定するための方法のステップc)と同じである。物質はここでは検出マイクロキャビティ内に存在し、たとえば、抗体−蛍光色素などで処理後、洗浄された粒子床に保たれている。この画像は上述の物質生データ画像である。
【0083】
バックグラウンド放射画像および対応する物質生データ画像が既に存在し、利用可能に格納されている場合、スキャニングおよび検出プロセスによって画像を再度生成する代わりに、結局ただ、ステップα′1およびステップα′2の画像に(たとえばコピーまたは読出によって)アクセスする結果となる。
【0084】
2つの画像は同じ条件下で、たとえば検出原理が蛍光に基づくものである場合には同じレーザ出力および同じ検出器感度で、検出されるべきである。
【0085】
第1の変形の第3のステップ、ステップα′3は、2つの画像を二次元で相関させることであり、それは二次元相関性の使用によって相関画像を規定する。二次元相関性の使用は、信号処理の分野では周知であり、参考文献[1]の90〜92頁を参照されたい。こうして、このステップは相関画像をもたらす。
【0086】
変形の第4のステップ、ステップα′4では、相関画像において最大の強度値を有する画素の位置が特定される。これは単純な比較アルゴリズムを用いることによって実行可能であり、最近で最大の値が格納されて、以前の画素データのどれともまだ比較されていない次のデータ、たとえば強度値と比較される。最大画素値、最大強度値を有する画素の位置が格納され、次のステップ、ステップα′5で使用される。
【0087】
ステップα′5では、識別された画素位置を使用することによって、バックグラウンド放射画像が、相関画像の正しい位置へ動かされる。画像の重なり合う部分は、画素ごとに減算される。
【0088】
これら5つのステップは、新しい画像、バックグラウンド処理済画像をもたらす。
【0089】
物質生データ画像は、望まれる物質放射データを含む。測定信号を生じさせる物質をマイクロキャビティに導入することにより(ステップbの一部)、新しいノイズが全く導入されない場合、ノイズ除去のプロセスは停止されてもよい。
【0090】
第2の変形では、バックグラウンド放射データの中央値が使用される。以下のステップが使用されてもよい:
・物質生データ画像にアクセスする。または、物質生データ画像生成する(ステップα″1);
・バックグラウンド放射データについての中央値を判定する(ステップα″2);
・中央値を用いて物質生データ画像の画素値を減算し、バックグラウンド処理済画像を格納する(ステップα″3)。
【0091】
バックグラウンド放射を減少させ、バックグラウンド処理済画像を構築する第2の変形を、ここにより詳細に説明する。
【0092】
蛍光などのバックグラウンド放射を除去するための、特に検出区域外のサーチ区域に存在する電子ノイズおよび光ノイズを除去するためのこの第2の変形は、上述の5つのステップの代わりに使用できる。この代替的な変形は、サイズが大きい不要のオブジェクトが検出区域外になく、かつ、バックグラウンド信号強度が画像内で一定であるという条件下で、非常に良好に作用する。この変形は、ディスクが1回しかスキャンされないという利点を有しており、それを以下に説明する。
【0093】
この代替的な変形における第1のステップ、ステップα″1は、放射に関連する物質が検出マイクロキャビティに取入れられた後で始まるべきである。上述の物質の分量を判定するための方法では、これはたとえば、検出区域が抗体−蛍光色素で処理された後、すなわちステップcに対応する。上述のように、放射についてのサーチ区域のスキャニング中、物質生データ画像の画素値が検出され、求められて、デジタル画素データとして格納される。物質生データ画像が既に存在し、利用可能に格納されている場合、スキャニングおよび検出プロセスによって画像を再度生成する代わりに、結局ただ、画像をコピーする/読出す結果となる。
【0094】
第2のステップ、ステップα″2では、検出区域外のサーチ区域の少なくとも一部についての画素値の中央値が計算され、バックグラウンド放射値として、たとえばバックグラウンド蛍光についての値として使用される。中央値とは、バックグラウンド放射(強度)についての推定値である。
【0095】
ステップα″3では、画素がすべて処理されてバックグラウンド処理済画像が提供されるまで、物質生データは中央値の寄与で、たとえば画素ごとの減算によって減少される。
【0096】
潜在的に、中央値を求めるためのステップは、何か別の形の平均値を求め、この値を次のステップで中央値の代わりに使用することと置き換えられ得る。
【0097】
α′およびα″の双方の方法は、スキャンされた各サーチ区域についてのバックグラウンド処理済画像、すなわち、蛍光などのバックグラウンド放射が低減した画像を提供し、この革新的な方法の他のステップとは別個に、または他のステップと組合せて使用可能であるが、現時点では前者が好ましい。
【0098】
ステップβ:ピーク妨害を減少させる。
【0099】
この方法は、埃、化学および他の人工産物から生じる、たとえばファイバからのピークの減少といったピーク妨害を減少させる1つ以上のステップを含んでいてもよい。妨害ピークは通常、比較的高い振幅と比較的狭い分布とを有する。しかしながら、理想的な検出区域の画像は滑らかで、妨害ピークを全く含まない。
【0100】
以下のステップが使用されてもよい:
・ラプラシアンフィルタを二次元で使用することによって、以前に格納された画像、通常バックグラウンド処理済画像から、ラプラシアン処理済画像を生成する(ステップβ1);
・前のステップで作成された画像、通常バックグラウンド処理済画像から、妨害しきい値を計算する(ステップβ2);
・しきい値計算に使用された画像に妨害しきい値限度を適用することによって、バイナリコード化ラプラシアン処理済画像を生成する(ステップβ3);
・クラスタにおける開始点を見つける(ステップβ4);
・開始点を包囲する最小矩形区域を判定する(ステップβ5);
・各ピーク区域内の補間値を計算し、ピークの元データを代入し、妨害がフィルタ処理された画像を格納する(ステップβ6)。
【0101】
ピーク妨害を減少させるためのプロセスを、ここでより詳細に説明する。
【0102】
こうして第1のステップ、ステップβ1では、放射強度画像、たとえば上述のようなバックグラウンド処理済画像が、ラプラシアンフィルタによって二次元で処理されてもよい。これは、以前に参照文献[1]から公知の標準的な方法である。このステップの結果、バックグラウンド処理済画像におけるピークが増幅される。この結果はバックグラウンド画像における最大放射(強度)で正規化される。このステップはラプラシアン処理済画像を提供する。
【0103】
第2のステップ、ステップβ2では、ステップβ1で使用された画像から計算された、確率的バックグラウンドノイズの標準統計関数平均および標準偏差の使用によって、妨害しきい値限度が計算される。このステップは、画像の妨害ピークを強調する。
【0104】
第3のステップ、ステップβ3では、ラプラシアン処理済画像がバイナリコード化される。コード化プロセスでは、しきい値限度に等しいかまたはそれよりも高い画素強度/値は、2つの対応するバイナリ値の一方、たとえば「1」または「正」に設定され、妨害しきい値限度未満の画素強度は、バイナリ値の他方、たとえば「0」または「負」に設定される。ステップβ2で求められた判定済妨害しきい値限度を、ステップβ3でコード化のために使用してもよい。このステップは画像を生成し、ピークの高強度画素は、クラスタとも呼ばれる群として現われる。
【0105】
第4のステップ、ステップβ4では、バイナリラプラシアン処理済画像のクラスタからの位置情報を用いることによって、最大値を有する各ピークでの画素を見つけるために、ラプラシアン処理済画像が処理されてもよい。クラスタでの最大値を有する各画素は、中心かつ開始点であると規定される。クラスタの他の画素は、バイナリラプラシアン処理済画像においてローに設定される。このステップはクラスタ画像をもたらす。
【0106】
第5のステップ、ステップβ5では、異なる区域サイズを用いた反復型検査によって最小矩形区域を判定するために、クラスタ画像において規定された開始点が使用される。前のステップでの規定に従って、かつ以前に行なわれたラプラシアンフィルタ処理の結果として、最小矩形区域が負の強度値またはゼロ値を有する画素しか含まない場合、ラプラシアン処理済画像に作用するこの反復は停止される。上記画素は対応する開始点を包囲し、対応する妨害ピークの位置、区域、およびピーク区域外のボーダー画素を規定する。
【0107】
第6のステップ、ステップβ6では、バックグラウンド処理済画像の妨害ピークは、対応するピークのボーダー画素間の補間値を用いて各ピーク区域内の元データを代入することによって除去される。この補間値は、適切な補間関数の使用によって計算され、線形関数および非線形関数の双方が可能な選択肢である。
【0108】
プロセスはこうして、検出区域の放射強度、たとえば蛍光強度の「妨害フィルタ処理済画像」を生成した。
【0109】
ステップχ:グローバルしきい値を求める。
【0110】
この目的は、測定された物質信号、すなわち検出区域における物質からの信号をバックグラウンド信号から分離するグローバルしきい値を求めることによって、妨害フィルタ処理済画像などの放射強度画像をバイナリにすることである。たとえば、検出区域画素はバイナリハイ、たとえば「1」と等しく、画像の残りはバイナリロー、たとえば「0」と等しくなるべきである。
【0111】
以下のステップの目的は、有効なグローバルしきい値を求めることである。これは、異なるしきい値を検査する反復によって行なわれる。グローバルしきい値は、検出区域に接続されていないサーチ区域の一部において、検出区域の画素よりも強度が高い画素が少ししかない場合に有効である。
【0112】
以下のステップが使用されてもよい:
・y合計グラフを生成する(ステップχ1);
・y合計グラフの中央値フィルタ処理を行なう(ステップχ2);
・検出区域の中央位置を判定する(ステップχ3);
・検出区域の、半径方向に向けられたエッジを判定する(ステップχ4);
・x合計グラフを生成する(ステップχ5);
・x合計グラフの中央値フィルタ処理を行なう(ステップχ6);
・エッジ曲線(相関性)を求める(ステップχ7);
・エッジ曲線における妨害ピークを抑制する(ステップχ8);
・検出区域の開始位置および終了位置を判定する(ステップχ9);
・グローバルしきい値の開始値を求める(ステップχ10);
・グローバルしきい値を、正しい検出区域幅を与える値に調節する(ステップχ11);
・グローバルしきい値の使用により、バイナリコード化された妨害フィルタ処理済画像を生成する(ステップχ12)。
【0113】
ここで、このプロセスをより詳細に説明する。
【0114】
第1のステップ、ステップχ1では、放射強度画像、典型的には妨害フィルタ処理済画像において、画素値が半径方向においてライン毎に集約され、放射強度、たとえば蛍光強度のy方向(スピンするディスク上の角度方向)における一次元y合計グラフが得られる。グラフ上の各y座標は、同じy座標を有する半径方向の画素値の合計となる。
【0115】
第2のステップ、ステップχ2では、y合計グラフが、たとえば中央フィルタ関数を用いて、妨害ピークを除去するようフィルタ処理される。
【0116】
第3のステップ、ステップχ3では、y方向(スピンするディスク上の角度方向)における検出区域の中心が、相関性の使用によって、かつフィルタ処理されたy合計グラフと相関長への入力値としての公知の検出区域幅とを用いて、計算され、位置が特定される。これは通常、1つの大きなピークを有するグラフを与えるはずである。
【0117】
第4のステップ、ステップχ4では、最大ピークの中心が検出区域の中心に設定される。ここで、中心および検出区域/粒子床幅についての公知のデータの使用によって、粒子床エッジの位置および半径方向の広がりを計算することができる。これにより、半径方向に向けられたボーダー/エッジ画素が公知となる。
【0118】
第5のステップ、ステップχ5では、前のステップで求められた境界(ボーダー)を用いて、放射強度が画像においてy方向(スピンするディスク上の角度方向)で集約され、放射強度のx方向(半径方向)におけるx合計グラフ(半径方向合計グラフ)が得られる。画素値の合計はステップχ1と同様に行なわれるが、同じ平面において直交する方向において行なわれる。
【0119】
次のステップ、ステップχ6では、x合計グラフが、中央値フィルタ関数を用いてフィルタ処理され、妨害ピークが除去される。
【0120】
第7のステップ、ステップχ7では、x方向における検出区域の開始が、ステップ関数とフィルタ処理されたx合計グラフとの相関性の使用によって判定される。数学的プロセスが、図9に示すエッジ曲線をもたらす。
【0121】
ステップχ8では、入口に対向して位置するエッジに近い妨害ピークが、ランプ関数を用いてエッジ曲線を乗算することによって抑制される。
【0122】
ステップχ9の目的は、(ステップχ8からの)フィルタ処理されたエッジ曲線における正の最高ピーク中心を見つけて最小検出区域長を用いることによって、検出区域の開始位置を見つけ、検出区域の終了位置を計算することである。
【0123】
検出区域エッジ、ボーダー画素の近似位置はここで公知となる。
【0124】
第10のステップ、ステップχ10では、グローバルしきい値が、画像処理のための最適なしきい値手法(参照文献[1]、360頁から開始)の使用によってここで求められる。バックグラウンドピークおよび粒子床ピークは同じ分散で正規分布していると仮定する。妨害フィルタ処理済画像から、推定バックグラウンド強度を、(区域A1+A3での中央バックグラウンド強度、または区域A2での中央強度バックグラウンド)の最大値として計算する。区域A1、A2およびA3の位置および向きを図3Bに示す。推定物質強度を検出区域の中央値として計算する。反復ステップについての開始値を、推定バックグラウンド強度と推定物質強度との平均として計算する。
【0125】
ステップχ11では、グローバルしきい値が、推定物質強度により規定される最大強度値と推定バックグラウンド強度により規定される最小値との間で反復調節され、検出区域の近似位置内部のy方向(角度方向)での画素の平均数が検出区域幅と等しくなるようにされる。
【0126】
ステップχ12では、格納された画像、特に格納された妨害フィルタ処理済画像をバイナリコード化して、バイナリコード化妨害フィルタ処理済画像にするために、計算されたグローバルしきい値が使用される。
【0127】
ステップδ:バイナリオブジェクトを検出区域外に除去する。
【0128】
以下のステップδ1〜δ2の目的は、妨害をすべて検出区域外に除去することである。以下のアルゴリズムは、オブジェクトがすべて1、すなわちバイナリハイに設定されている、バイナリコード化された妨害フィルタ処理済画像のデータを処理する。さらに、近似計算された検出区域位置のボーダー内には除去すべきオブジェクトがなく、検出区域が画像の最大区域である、と仮定する。
【0129】
第1のステップ、ステップδ1は、バイナリコード化された妨害フィルタ処理済画像においてオブジェクトをすべてラベル付けすることであり、各オブジェクトの接続された画素の数、すなわち区域が判定される。ラベル付けは、画像処理において公知の方法である。
【0130】
第2のステップ、ステップδ2は、近似検出区域位置内の最大オブジェクト以外はすべて除去することにより、バイナリ検出区域画像を生成することである。
【0131】
ステップε:検出区域の不要な区域を除去する。
【0132】
この目的は、時として、検出区域内の「正規化された」区域についての量、すなわち予め規定された量の画素を計算することである。これは、同じマイクロ流体装置における検出区域間の差異を最小限に抑えるために行なわれる。この差異は、とりわけ、検出区域からのバックグラウンド放射、たとえば蛍光に依存する。検出区域内の強度信号の3D分布が、検出区域長の小さな変動とは無関係であると仮定する。物質信号は、対応する検出マイクロキャビティの入口に最も近いかもしれない検出区域の部分から生じる。使用されるアルゴリズムは、CDの内側部分から始まるバイナリ検出区域画像における正規化区域((最小検出区域長)×(検出区域幅))内のみに画素を含む新しいバイナリ画像を生成するためのプロセスである。
【0133】
第1のステップ、ステップε1は、バイナリ検出区域画像において正規化区域((最小検出区域長)×(検出区域幅))の場所外のバイナリハイと示された画素をすべてバイナリ「ロー」に設定することによって、正規化区域画像を生成することである。
【0134】
第2のステップ、ステップε2は、発明されたプロセスにおいて以前に生成され格納された妨害フィルタ処理済画像、および正規化区域画像における各対応画素を互いに乗算し、正規化区域に対して計算、たとえば積分を行なうことである。
【0135】
ステップφ:ノイズのある画像にデフォルト検出区域を適用する。
【0136】
物質信号を隠す、非常にノイズのある画像については、上述の方法は適切には、または全く機能しない。処理済画像がすべて検出区域の同じ組、たとえば同じCDから生じる場
合、以下のアルゴリズムが作用する。検出区域はその場合、角度位置において良好に、半径方向においてかなり良好に規定される。
【0137】
サーチ区域内の検出区域の位置を特定するアルゴリズムの最中、信頼度が高い検出区域についての位置はすべて格納される。
【0138】
ノイズのある画像にデフォルト検出区域を適用するための方法は、以下のステップを含んでいてもよい:
ステップφ1:高い信頼度基準を満たす、判定された検出区域位置(ステップχ)をすべて自動的に保存する;
ステップφ2:平均検出区域位置を計算する;
ステップφ3:1つ以上の予め定められた条件が満たされた場合に、平均検出区域位置を自動的に使用する。
【0139】
検出区域についての平均位置は、以下の条件をすべて満たす計算された検出区域すべてに対して自動的に適用される。
・その角度開始位置と平均開始位置との差が、[量]×[検出区域幅]を越えており、式中、[量]は0−1で選択される。
・正規化区域画像における、全半径についての角度方向でのバイナリハイ画素の平均個数が、[量]×[検出区域幅]未満であり、式中、[量]は0−1で選択される。
・角度停止位置と角度開始位置との差が[量]×[検出区域幅]よりも大きく、式中、[量]は1−10で選択される。
・正規化区域画像における、全半径についての角度方向でのバイナリハイ画素の個数が、[量]×[検出区域幅]×[最小検出区域長]未満であり、式中、[量]は0−1で選択される。
【0140】
画像データの分析
この発明は、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから信頼値を求めるための方法であって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納される方法に関する。各画像は、サーチ区域の平面(二次元)における画素の場所/アドレスと、スキャニング動作により提供されるその画素の場所についての少なくとも1つの検出/測定された測定値、たとえば蛍光強度とによって形成される。物質生データ画像において物質生データ情報からノイズを除去するための異なるステップα−φを、すべて一緒に、または選択されたステップのみ使用して、ノイズが減少した画像を生成してもよい。
【0141】
上述のように、ノイズを除去する方法におけるステップα−φの最中、多数の異なる画像が作成される。スキャンされた生データ画像を含むこれらの画像の各々は、以下に説明する信頼値を求めるためのプロセスにおいて使用されてもよい。
【0142】
この方法は、少なくとも1つの信頼値を求めるために、取得されたデータ情報をデータ処理するステップを含む。この発明の一実施例では、上記少なくとも求められた信頼値は、各画像について、スクリーン、ブラウン管(CRT)ディスプレイ、液晶ディスプレイ(LCD)または他の表示装置、もしくはプリンタなどの出力装置上に提示されてもよい。
【0143】
この発明の異なる実施例に従って信頼値を求める場合、格納された画像全体、または格納された画像の一部のデータ情報が仕様されてもよい。
【0144】
この発明の一実施例では、信頼値は、画像における信号データ分布によって求められる。
【0145】
信頼値を求めるための異なるアルゴリズム例
以下、文字Cで示される信頼値は、データ情報である画像内容、たとえば画像の強度信号分布を用いた計算により、または画像内容の分析により、もしくは分析および計算の組合せにより、求められる。Cは、画像毎、検定毎などで変わる変数である。
【0146】
以下に、信頼値を計算する3つの異なる方法を説明する。
【0147】
すべての例において、信頼値Cは最初、1に設定されている。信頼値の範囲は0−1である。
【0148】
例1:電子的に飽和した信号
1.最大可能強度の99.5%よりも強い、バックグラウンド処理済画像(上述)における(画素の個数)、飽和画素の個数Npsを発見する。
2.飽和画素の個数Npsを画像サイズAIで除算することによって、飽和画素の正規化個数NpsNを求める。
NpsN=Nps/AI
3.信頼値
【数1】
に従って、信頼値を修正する。
【0149】
このアルゴリズムのC、CMod1は、格納された画像のデータがどれくらい、電子的に飽和した信号として規定された問題または欠陥に依存しているかを示す(図9参照)。
【0150】
例2:ノイズピーク
1.上述のようなアルゴリズムβのステップ(特にステップβ4を参照)を用いることによって、ノイズピークについての開始点を計算する。
2.ここにノイズピーク強度アレイと呼ばれるノイズピーク強度のアレイを、各ノイズピーク位置についてのバックグラウンド処理済画像(上述)から強度を計算することによって求め、バックグラウンド処理済画像における最大強度IMAXを求め、アレイについて、最悪の妨害の予め規定された最大個数nd(デフォルトは10に設定)、この場合、最高ノイズピークを選択する。
3.ノイズピーク強度IP(ノイズピーク開始点画素)がすべて加算され、バックグラウンド処理済画像における最大強度IMAXで除算されたものの合計として、ノイズピーク強度SIPを計算する。
SIP=Σ(IP(ノイズピーク開始点画素)/IMAX)
4.ノイズピーク強度SIPを許容妨害の予め規定された最大個数nd(デフォルトは10に設定)で除算することによって、ノイズピーク正規化強度SIPNを計算する。
SIPN=SIP/nd
(このアルゴリズムは、許容妨害の最大個数を越えて考慮することはない。)
5.式CMod2=C*(1−0.5*SIPN)に従って、Cを修正する。
(たとえば、画像において最高強度を有するノイズピークが10個ある場合、信頼度は半減する。)
【0151】
このアルゴリズムのC、CMod2は、格納された画像のデータがどれくらい、ノイズピー
クとして規定された問題または欠陥に依存しているかを示す(図7参照)。
【0152】
例3:ランダムノイズ
1.一定のバックグラウンドノイズ強度IBCを、ステップχ10から、IBA1A3(区域A1+A3の中央バックグラウンド強度(図3b、および説明内の対応する文を参照))またはIBA2(区域A2における中央強度バックグラウンド(図3b、および説明内の対応する文を参照))の最大値として設定する。
2.IBSTDA1およびIBSTDA3の最小値を計算し、選択することによって、バックグラウンド強度標準偏差IBSTD、バックグラウンドstdを、計算する。ここで、IBSTDA1は区域A1の強度標準偏差であり、IBSTDA3は区域A3の強度標準偏差である。
3.IBCまたは2*IBSTDの最大値として、バックグラウンドノイズIBを設定する。
4.バックグラウンドノイズIBを、画像(検出区域)の強度中央値を用いた推定物質強度値、Imvで除算したものとして、正規化バックグラウンドノイズIBNを計算する。
IBN=IB/Imv
5.CMod3=C*(1−(0.3*IBN))に従って、Cを修正する。
【0153】
このアルゴリズムのC、CMod3は、格納された画像のデータがどれくらい、ランダムノイズとして規定された問題または欠陥に依存しているかを示す(図10参照)。
【0154】
当業者であれば、上述の例における異なる式の係数は、この発明の範囲を限定しない例としてのみ考慮されるべきであること、および、値の好適な範囲内で設定され得ることを理解するであろう。
【0155】
信頼値の設定
したがって、画像データを分析する際、妨害のいくつかのケースが取扱われ得る。したがって、この発明の一実施例に従った方法は、この説明で先に述べたような格納された画像のデータ情報により、画像の検出された問題またはある欠陥に関連する信頼値を求めるステップをさらに伴う。問題/欠陥の種類と、1つの検出された問題/欠陥または検出された問題/欠陥の組合せによって生じる妨害の量とを検出できるよう、多数の異なる信頼度計算が実行されてもよい。
【0156】
起こり得る問題/欠陥の種類は、異なる条件に依存する。たとえば、反応マイクロチャンバ/マイクロキャビティが、上記データ情報を取得した源である固相または通常均質な溶液を含む場合である。
【0157】
反応マイクロチャンバが、上記データ情報を取得した源である固相を含む場合、上記固相は、たとえば、
a) 反応チャンバの壁の一部、または、
b) 多孔質床、たとえば多孔質モノリシックプラグ、または多孔質粒子もしくは非多孔質粒子の充填床、または、
c)懸濁粒子、
であり、データ処理ステップは、
・乾燥した床、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・ノイズピーク、
・床の孔、
・電子的に飽和した信号、
・洗浄不良、
・抗体の捕捉不良、
・化学的に飽和した信号、
・ランダムノイズ、
という問題および欠陥のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値Cを設定するステップをさらに伴う。
【0158】
反応マイクロチャンバが、上記データ情報を取得した源である、通常均質な溶液を含む場合、データ処理ステップは、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・不均一な信号分布、
・電子的に飽和した信号、
・ランダムノイズ、
という問題および欠陥のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値Cを設定するステップをさらに伴う。
【0159】
以下の図は、取扱う公知の妨害をすべて示している。黒い点が妨害である。粒子床の始まりとは、CDの内側部分から見える最初の粒子である。粒子床の終わりとは、CDの外側部分から見える最初の粒子である。
【0160】
図4:乾燥した床の画像は、強度が非常に高い画素の小さなグループ(図では黒)と、それらの間の強度が非常に低い画素(図では白)とによって特徴付けられる。非常に高い強度の画素は粒子床区域の内部に位置すべきである。粒子床区域は通常、画像のバックグラウンドよりも高い強度を有するべきである。
【0161】
図5:角度方向における較正不良は、期待される構造幅を有するバックグラウンドよりも強度が高い既存オブジェクトがないことによって特徴付けられる。または、オブジェクトが画像の角度方向エッジの一方に位置する。これは、1つのCD上のほぼすべての画像について同一であるべきである。
【0162】
図6:半径方向における較正不良については、粒子床が画像の外側CDエッジまたは内側CDエッジに位置する。これは、1つのCD上のほぼすべての画像について同一であるべきである。
【0163】
図7:ノイズピークは、通常小さな画素区域を有する非常に高い強度の(しばしば画像において最高の)ピークによって特徴付けられる。埃および化学的人工産物がノイズピークを作り得る。
【0164】
図8:床の孔の画像は、粒子床外のバックグラウンドに近い強度レベルを有する粒子床内の比較的大きな区域によって特徴付けられる。
【0165】
図9:電子的に飽和した強度信号を有する画像では、1つまたはいくつかの画素が、電子機器からの最大可能値と同一である(画像内の黒い区域)。
【0166】
図10:画像のランダムノイズ問題は、構造幅と通常の粒子床長さとを有する有意な信号がまったくないことによって特徴付けられる。
【0167】
以下の図は、画像の境界(またはボーダー)の1つからy方向(スピンするディスク上の角度方向)における画像での放射強度を集約することによって計算された合計グラフを示している。各ボーダー画素(ボーダー上の画素)について、対応するボーダー上の画素を含む、角度方向における同じ水平線上にある全画素の強度が集約される。グラフは、角
度集約強度の変動を、半径方向の関数として示している。
【0168】
図11:画像の通常強度信号分布は、粒子床の始まりにおける大きな信号ピークによって特徴付けられる。このピークは連続的に下がり、粒子床からの信号のみを有して終わる。それはもう1度、より低い粒子床へと下がり、画像の外側部分で、バックグラウンドからの信号のみを有して終わる。
【0169】
図12:蛍光液体は、期待される信号ピークと比較して、CDの内側部分に向かう、バックグラウンドよりも高い平坦な強度レベルによって特徴付けられる。
【0170】
図13:化学的に飽和した信号画像は、粒子床の始まりでは信号強度が比較的長い距離にわたってほぼ同じレベルの高さを有し、粒子床および画像の終わりに向けて連続的に強度が下がることによって特徴付けられる。
【0171】
図14:洗浄不良の問題は、期待された信号ピークの後で、列の外側部分に向け、画像の信号強度が増加することによって特徴付けられる。増加した信号は、粒子床が終わると急速に降下する。
【0172】
図15:サンプル内に存在するヒト抗マウス抗体(HAMA)によって、サンドイッチ検定における抗体を捕捉および検出する架橋結合である。HAMA抗体の存在は、サンプルの分析物内容を誇張する。それは、画像の始まりに位置していない幅広いピークと、粒子床の終わりの比較的高い強度とによって特徴付けられる。固相に対する捕捉不良、または、固相へのラベル付けされた反応物質/試薬の不要な結合である。捕捉不良は、捕捉反応物質/試薬の不良で、および/または、捕捉ステップ中に反応マイクロチャンバを通る流量が高過ぎたことで説明される。不要な結合は、分析物以外のサンプル反応物質の望ましくない結合と、そのようなサンプル反応物質への、ラベル付けされた反応物質のその後の結合とによって説明され得る。典型的な一例は、同じ種の捕捉抗体およびラベル付けされた抗体を利用して、この特定の種(HAMA−抗体)に対して敏感な個人から得たサンプルにおける分析物を検定するためのサンドイッチ検定である。
【0173】
この発明はまた、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから信頼値Cを求めるためのシステムであって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、上記システムは、信頼値を求めるために、取得されたデータ情報をデータ処理するための手段をさらに含む、システムにも関する。上記システムはコンピュータ装置を含み、上記データ処理するための手段は、発明された方法のステップを上記コンピュータ装置に実行させるためのコンピュータプログラム読取可能コードを含むコンピュータプログラムソフトウェアとして実現されてもよい。
【0174】
データ処理するための手段は、格納された画像全体または格納された画像の一部のデータ情報を使用して信頼値を求めるための手段をさらに含む。
【0175】
システムは、信頼値Cを提示するための手段をさらに含んでいてもよい。発明されたシステムの一実施例は、信頼値に基づいて、結果が許容可能か許容不能かを提示するための手段を含む。
【0176】
さらに、システムは、画像のデータ情報により、画像の検出された問題またはある欠陥に関連する信頼値を設定するための手段を含んでいてもよい。
【0177】
反応マイクロチャンバが、上記データ情報を取得した源である固相を含む場合、上記固相は、
a) 反応チャンバの壁の一部、または、
b) 多孔質床、たとえば多孔質モノリシックプラグ、または多孔質粒子もしくは非多孔質粒子の充填床、または、
c)懸濁粒子、
であり、データ処理するための手段は、
・乾燥した床、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・ノイズピーク、
・床の孔、
・電子的に飽和した信号、
・洗浄不良、
・抗体の捕捉不良、
・化学的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するための手段をさらに含む。
【0178】
反応マイクロチャンバが、上記データ情報を取得した源である、通常均質な溶液を含む場合、データ処理するための手段は、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・不均一な信号分布、
・電子的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するための手段をさらに含む。
【0179】
発明されたシステムの一実施例では、データ処理のための手段は、画像方向の1つにおける信号データを集約した結果であるグラフから、サーチ区域についての信頼値を求めるための手段を含む。たとえば、図11は、画像の境界(またはボーダー)の1つからy方向(スピンするディスク上の角度方向)における画像での放射強度を集約することによって計算された合計グラフを示している。各ボーダー画素(ボーダー上の画素)について、対応するボーダー上の画素を含む、角度方向における同じ水平線上にある全画素の強度が集約される。グラフは、角度集約強度の変動を、半径方向の関数として示している。
【0180】
この発明はまた、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから信頼値を求めるためのコンピュータプログラム製品であって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、上記コンピュータプログラム製品は、コンピュータ読取可能プログラムコードが内部に設けられたコンピュータ読取可能記憶媒体を含み、コンピュータ読取可能プログラムコード手段は、発明された方法、請求項1〜10に記載のステップの各々を行なうためのコンピュータ読取可能プログラムコード手段を含むことを特徴とする、コンピュータプログラム製品にも関する。
【0181】
コンピュータ読取可能記憶媒体は、記録媒体、ハードディスク、コンピュータメモリ、読出専用メモリ(ROM)、プログラマブル読出専用メモリ(PROM)、消去可能プログラマブル読出専用メモリ(EPROM)、フラッシュメモリ、ランダムアクセスメモリ(RAM)、リムーバブルデータストレージ、または電気搬送信号のいずれであってもよい。リムーバブルデータストレージは、フロッピー(登録商標)ディスク、ZIP(登録商標)、CD(コンパクトディスク)、フラッシュメモリ、または磁気カードもしくは磁気テープのいずれであってもよい。
【0182】
ニューラルネットワークの使用によって信頼値を求めるための方法
好ましい別の実施例では、分類にニューラルネットワークが使用される。上述のように、物質生データ画像の信頼度が高いか低いかが分類できることは、時としてある種重要である。これは、予め訓練された多層パーセプトロンニューラルネットワークで達成可能であり、それは、「ニューラルコンピューティング入門」("Neural computing, an introduction")R.ビール(Beale)およびT.ジャクソン(Jackson)、1990年発行(ISBN 0−85274−262−2、IOPパブリッシング社(IOP Publishing Ltd.)、テクノハウス(Techno house)、レッドクリフウェイ(Redcliffe way)、ブリストル(Bristol)BS1 6NX UK)という書籍(参考文献2)に記載されている。63頁を参照されたい。この多層ネットワークは、1つまたは2つの隠し層を有する(参考文献2、67頁)。アプリケーションスペシャリストは、訓練および制御データの組を分類する。ニューラルネットワークは、参考文献2の73頁に従って訓練される。ニューラルネットワークへの入力は、以下の小見出しにある計算を使用する。
【0183】
この発明はまた、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから信頼値を求めるためのニューラルネットワークであって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、システムは、請求項1〜10に記載の方法ステップの各々を行なうための手段をさらに含む、ニューラルネットワークにも関する。
【0184】
入力からの出力は、信頼度に対応する0から1の値である。
【0185】
この説明において前述したように、問題/欠陥の種類と、1つの検出された問題/欠陥または検出された問題/欠陥の組合せによって生じる妨害の量とを検出できるよう、多数の異なる分析および計算が実行される必要があり得る。発明された方法およびシステムに従って、ある欠陥を多数の他の欠陥から分離するには、多数のパラメータが規定および計算され、ここで、特定のまたは特徴的なパラメータの各々は、ある特定の特色を捕捉するよう設計される。上記パラメータは、1組の画像特性、特徴セットを形成する。上記パラメータ、または特徴セットは、計算された後、この発明の一実施例ではニューラルネットワークである分類子への入力データとなる。
【0186】
この発明の一局面によれば、信頼値(C)を求めるために、取得されたデータ情報のすべてまたは一部を用いて、少なくとも1つの特性パラメータ値が求められ、および/または計算される。
【0187】
この発明の別の局面によれば、信頼値(C)を求めるために、取得されたデータ情報のすべてまたは一部を用いて、少なくとも1つの特性パラメータ値が求められ、および/または計算され、上記少なくとも1つの特性パラメータ値は、分類子への入力として使用される。
【0188】
この発明のさらに別の局面によれば、信頼値(C)を求めるために、取得されたデータ情報のすべてまたは一部を用いて、少なくとも1つの特性パラメータ値が求められ、および/または計算され、上記少なくとも1つの特性パラメータ値は、分類子への入力として使用され、上記分類子はニューラルネットワークである。
【0189】
パラメータを設計する元となる一組の画像特性は、以下のとおりである。
【0190】
・ピーク妨害、
・電子的飽和、
・洗浄不良、
・捕捉抗体不良、
・ランダムノイズ、
・滑らかな信号、
・流れ抑制、
・マイクロ流体装置の材料から生じる妨害信号。
【0191】
上述の各項目について、手元の画像がどの程度これらの特性からなるかを計算するアルゴリズムが設計されている。このアルゴリズムを以下に詳細に説明する。
【0192】
電子的に飽和した信号
この発明の一実施例によれば、分類および信頼値は、例1のステップ1および2を含むアルゴリズムで計算されたパラメータNpsNによって求めることができる。
【0193】
別の実施例によれば、分類および信頼値は、以下に説明するアルゴリズムによって計算される所望のパラメータによって求めることができる。最大振幅(正規化されている場合、100%、または1に等しい)を有する信号を持つ画像は飽和している。飽和の程度に依存して、画像は良好であると判断される場合もあり、または、価値がないとみなされることもある。
【0194】
このアルゴリズムは以下のように作用する。
【0195】
検出区域内で、最大強度のたとえば95%を超える強度を有する画素の合計である飽和画素合計が求められる。飽和画素合計を区域内の画素の総数で除算することによって、飽和画素の商が計算される。上記商を100で乗算することによって、飽和画素比率rが与えられる。最後に、計算されたrが、以下の特性パラメータを与えるシグモイド関数における入力として使用される。
【0196】
【数2】
【0197】
k=10に設定することにより、急なシグモイドが得られ、それは、ほぼ5までのrの値についてはゼロであり、5よりも若干大きい値については1である。
【0198】
例:
r=2%である場合、それは選択された5%よりも小さく、したがって画像は比較的飽和濃度が低く、シグモイド関数はゼロであり、画像は許容可能であるとみなされる。r=10%である場合、画像は飽和濃度が高いとみなされ、シグモイド関数の結果は1であり、画像は神経網によって無用であると分類される。
【0199】
ピーク妨害およびノイズピーク
この発明の一実施例によれば、分類および信頼値は、例2のステップ1および4を含むアルゴリズムで計算された特性パラメータSIPNによって求めることができる。
【0200】
別の実施例によれば、分類および信頼値は、以下に説明するアルゴリズムに従って計算される所望のパラメータによって求めることができる。画像がピーク妨害によってどの程度含まれているかを判断するには、決定的な要因が多数ある。なかでも最も重要なのは、ピークのサイズ、画像の場所、およびピークの総量である。このアルゴリズムはしたがって、これらの異なる局面を1つに圧縮すること、または各パラメータを別個のものとして扱うことが可能である。しかしながら、すべての局面を1つの単一アルゴリズムに組合せる際、満足のいく結果を得るためには問題がしばしば存在する。以下の例では、各ピークのサイズおよびピークの個数は、場所パラメータとは別個に取扱われる。
【0201】
以下の設計されたアルゴリズムは、最大ピークの量を計算し、それを信号のサイズ、つまり総量に関連付ける。
【0202】
このアルゴリズムの詳細を以下に説明する。
1.ピークの場所は予め、既存のピーク検出アルゴリズムによって特定される。上述の例2を参照されたい。検出されたすべてのピークのうち、検出区域内、たとえば粒子床などの固相内、または、固相/検出区域ボーダーから規定された距離の範囲内にあるピークのみが考慮される。この距離は、画素の個数、好ましくは10画素以下で規定されてもよい。
2.最大強度値を有する画素の周囲の予め定められた区域からのピーク強度値を大きい順に並べ替え、検出された各ピークについて並べ替え手順を繰返す。
3.しきい値レベルが最高ピークの一番上に置かれ、(2)のリストからの次の画素へ下げられる。
4.画像はこのレベルでしきい値設定され、ラベル付けされたバイナリ画像が取得される。ピーク画素を包囲する区域がベクトルで格納される。
5.ピーク画素を包囲する区域において有意な増加があるまでステップ(2)〜(4)が繰返される。前のしきい値レベルが選択され、ピークの量が計算される。
6.最終的なパラメータ値PPD1として、(1)からの検出区域全体における強度量(検出区域内の全画素の合計)によって除算されたピーク量が使用される。
【0203】
効率をさらに高め、ラベル付け(時間のかかる作業であることがわかっている)の使用を最小限に抑えるため、ピーク画素の周囲の区域に有意な増加がない限り、下方へのステップサイズ(ステップ3参照)は2倍にされる。
【0204】
別個のパラメータ値PPD2として、粒子床の前端からの最大ピークの街区距離が計算される。
【0205】
洗浄不良
検出区域に関連する固相、たとえば多孔床の洗浄プロセス中、洗浄液は、固相における不特定の結合剤をすべてうまく除去しないかもしれない。最高画素強度は、完全な条件に関しては、流れが固相に入る場所である固相の始めに集中するが、それに代わり、固相の終わりに集中する。上記画像は「洗浄不良」画像を呼ばれる。そのような画像での信号強度量は、大きな後方へのチルトによって特徴付けられ、「洗浄不良」画像は、多数の異なる強度しきい値レベルの各々について、バイナリ画像(各画素は、信号強度量外にある場合にはゼロであり、上記量内に位置する場合には1である)を作り出すことによって識別可能である。単一のパラメータにおけるチルトを捕捉するために、各バイナリ画像につい
ての質量中心が計算される。以下に好適なアルゴリズムの一例を示す。
【0206】
1.適切なしきい値を得るために、統合区域410における信号強度量の下位四分位点、中間および上位四分位点の強度値が評価される。
2.選択されたしきい値強度値の各々について、信号強度量のバイナリ画像が作成される。
3.バイナリ画像の各々について質量中心座標が計算される。3つのバイナリ画像は、統合区域のゼロ強度レベルを超える、異なる強度レベルに位置する。
4.最小二乗方程式により、直線を、バイナリ画像の3つの質量中心座標を通るよう適合させる。流れ方向における直線のチルト係数は、所望の特性パラメータPPWとして使用される。
【0207】
捕捉反応物質、たとえば抗体の不良
検出区域と関連した固相に固定された捕捉反応物質がその対応物を十分速く捕捉しない場合、捕捉された対応物は検出区域/固相中に均一に分布され、検出区域/固相の始まりだけにある理想的な場合のようにはならない。生データはあまり信頼できなくなり、低い信頼度をもたらしてしまう。捕捉反応物質、たとえば抗体の不良を被る画像は、検出区域/固相、たとえば粒子床の全体にわたって非常に均一に分布された信号を有し、このため大きな量を所有する。所望されるパラメータは、統合区域410における全画素の強度値を積分、またはむしろ加算することにより、かつ、得られた値を統合区域のサイズで除算することにより、計算される。
【0208】
【数3】
【0209】
ランダムノイズ
この発明の一実施例によれば、分類および信頼値は、例3のステップ1および4を含むアルゴリズムで計算されたパラメータIBNによって求めることができる。
【0210】
別の実施例によれば、分類および信頼値は、以下に説明するアルゴリズムに従って計算される所望のパラメータによって求めることができる。低品質の画像はしばしば、信号の欠落を被り、大量のノイズが画像全体にわたって均一に広がる。一般に、粒子床外の分散が増加するにつれて、品質は悪くなる。チルトパラメータの計算と同様のアプローチがここで提案される。
【0211】
1.生画像全体がその上位四分位点でしきい値設定され、この強度レベルでのバイナリ画像が作成される。
2.バイナリ画像の周囲が計算され、外縁が省略される。
3.最後に、周囲を画像サイズで除算することによって、所望の特性パラメータPRNが得られる。
【0212】
バイナリ画像の周囲を計算する際、いわゆるショットノイズがランダムノイズ画像を特徴付ける。1つの画素自体は4つのエッジをもたらし、一方、大きなバイナリオブジェクトは、多くの画素をエッジなしで内部に所有する。ショットノイズ画像はパラメータについての大きな値につながり、独特の信号を有する画像は、小さな周囲を作り出す1つのカウンタのみを有する。
【0213】
滑らかな信号
信号の形状は、いくつかのパラメータで捕捉することがより難しい重要な特徴である。「良好な形状の」信号を有利に扱うことは望ましい。信号量の形状を判断する際、最も重要な特性は、信号量の滑らかさである。目視分析は、良好な形状の信号については、その形状がほぼ正方形であることを示唆する。角度方向に沿った信号プロファイルは、多数の画素から統合区域に信号の最大値を選び、プロファイルをベクトルで格納することによって得られる。角度方向に沿った信号プロファイルを使用し、近似二次多項式曲線からのずれを計算することは、信号がどれくらい滑らかかを示す。ずれの平均は、特性パラメータPSSとして使用される。
【0214】
【数4】
y=近似二次多項式。
p=前からの信号プロファイル。
【0215】
流れ抑制
マイクロ流体装置、たとえばCDの生産中に起こり得る一問題は、粒子床の形であり得る固相などを含む反応マイクロキャビティに至るチャネルが、埃、粒子またはファイバなどで詰まってしまうことである。結果として得られる画像は、内側半径方向へ向かう隆起を有する、非常に特徴的な外見を有する。設計されたアルゴリズムは、画像内の小さい、予め規定された区域を利用する。
【0216】
区域Cは、統合区域のボーダー間に中心があり、その側の1つが入口側で画像ボーダーと一致している、5×5画素区域である。区域Lは、入口側の画像区域の左隅における5×5の画素区域である。区域Rは、入口側の右隅における5×5の画素区域である。
【0217】
【数5】
【0218】
測定される信号に干渉する材料で作られたマイクロ流体装置
時として、検出区域に関連する反応/検出マイクロキャビティ外の領域が、所望の信号から分離するのが困難な信号を促す場合がある。たとえばCDタイプのマイクロ流体装置におけるプラスチック材料は、所望の信号が蛍光である場合に問題を起こす恐れがある広い帯域の蛍光を生じさせる場合がある。このパラメータについて選択されたアプローチは、再度、しきい値方法である。蛍光といったこの種の望ましくない信号に影響される画像の優勢な区域は、(流れ方向における)底端および側端に向かって集中しているため、この区域は以下に説明する手順によって分離される。
【0219】
1.所望の信号区域、たとえば蛍光区域が、統合区域の上位四分位点でしきい値アプローチによって規定および分離され、バイナリ画像をもたらす。
2.ステップ(1)で得られたバイナリ画像が、画素に関して、元画像(生強度画像)を用いてその上位四分位点で乗算され、「信号量画像」をもたらす。
3.ステップ(2)により提供される画像の信号強度の量を計算することによって、特性パラメータPMDが得られる。
【0220】
上述のアルゴリズムは、信頼値を求めるための発明された方法において使用されるパラメータを生成する。
【0221】
マイクロ流体装置のマイクロチャネル構造における分析プロセスから信頼値を求めるための発明された方法の異なる実施例は、スタンドアロンシステム(図1の参照番号100)において実現されてもよく、上記方法は、
分析プロセスを実行するステップと、
信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって、分析プロセスのデータ情報を取得するステップとを含み、上記サーチ区域は分析プロセスの結果を含んでおり、上記方法はさらに、
上記取得されたデータ情報を、格納された画像として、スキャンされた各サーチ区域につき1画像ずつ格納するステップとを含み、
上記方法は、
信頼値を求めるために、取得されたデータ情報をデータ処理するステップと、
所望すれば、信頼値をディスプレイ装置上に提示するステップとをさらに含むことを特徴とする。
【0222】
発明された方法は、スタンドアロンシステムの制御ユニット(図1の110)に格納され、それによって実行されてもよい。
【0223】
発明された方法はまた、マイクロ流体機器、システムまたは装置に関連付けられていない、もしくは接続されていない、別個のコンピュータ手段/処理ユニット上で実行されてもよい。コンピュータ手段または処理ユニットは、特化コンピュータ、サーバ、パーソナルコンピュータ、デジタルプロセッサ、中央処理ユニットなどであってもよい。
【0224】
この発明のある革新的な局面は、添付の特許請求の範囲において、より詳細に規定される。この発明およびその利点が詳細に説明されたが、添付の特許請求の範囲によって定義されるようなこの発明の精神および範囲から逸脱することなく、さまざまな変更、代替および置換がここになされ得ることが理解されるはずである。さらに、この出願の範囲は、明細書に記載されたプロセス、機械、製造、物質の組成、手段、方法およびステップの特定の実施例に限定されるよう意図されてはいない。当業者であればこの発明の開示から容易に理解するように、ここに記載した対応する実施例と実質的に同じ機能を実行し、または実質的に同じ結果を達成する、現在既存の、または後々開発されるプロセス、機械、製造、物質の組成、手段、方法、またはステップが、この発明に従って利用されてもよい。したがって、添付の特許請求の範囲は、そのようなプロセス、機械、製造、物質の組成、手段、方法、またはステップをその範囲内に含むよう意図されている。
【図面の簡単な説明】
【0225】
【図1】マイクロ流体装置のためのシステムを概略的に示すブロック図である。
【図2】マイクロ流体装置の一実施例を示す図である。
【図3A】サーチ区域の概略的な図である。
【図3B】サーチ区域の概略的な図である。
【図4】粒子床のサーチ区域に対応する画像における信号分布の例を示す図である。
【図5】粒子床のサーチ区域に対応する画像における信号分布の例を示す図である。
【図6】粒子床のサーチ区域に対応する画像における信号分布の例を示す図である。
【図7】粒子床のサーチ区域に対応する画像における信号分布の例を示す図である。
【図8】粒子床のサーチ区域に対応する画像における信号分布の例を示す図である。
【図9】粒子床のサーチ区域に対応する画像における信号分布の例を示す図である。
【図10】粒子床のサーチ区域に対応する画像における信号分布の例を示す図である。
【図11】サーチ区域における信号分布の例を平面図で示す図である。
【図12】サーチ区域における信号分布の例を平面図で示す図である。
【図13】サーチ区域における信号分布の例を平面図で示す図である。
【図14】サーチ区域における信号分布の例を平面図で示す図である。
【図15】サーチ区域における信号分布の例を平面図で示す図である。
【技術分野】
【0001】
この発明は、マイクロ流体システムと、分析プロセスの品質を判定するためのプロセスとに関する。
【0002】
より詳細には、この発明は、分析プロセスの品質、好ましくは信頼値Cを判定するための方法、システム、ニューラルネットワーク、およびコンピュータプログラム製品にも関する。
【背景技術】
【0003】
発明の背景
「マイクロ流体」という用語は、たとえば少なくとも1つの断面寸法が約0.1μm〜約500μmの範囲にあるような微小規模の寸法を有するチャンバおよび/またはチャネルの単体もしくはネットワークを有するシステムまたは装置を指す。取扱われる体積はナノリットルの範囲、つまり5000ηl未満、概して1000ηl未満である。マイクロ流体基板はしばしば、フォトリソグラフィ、湿式化学エッチング、射出成型、エンボス加工、および半導体業界で採用されているものと同様の他の手法を用いて作製される。結果として得られる装置を用いて、さまざまな高度の化学的および生物学的分析手法を行なうことができる。
【0004】
マイクロ流体分析システムは、従来の化学的または物理的な実験室手法をしのぐ多数の利点を有する。たとえば、マイクロ流体システムは、およそナノリットル、さらにはピコリットルのサンプルを通常使用した小さなサンプルサイズを分析するために特に良好に適合される。チャネルを規定する基板は比較的低コストで生産され、チャネルは、混合、計量配分、バルブ調整、反応、検出、電気泳動などを含む数々の分析演算を行なうよう構成可能である。マイクロ流体システムの分析能力は一般に、ネットワークチャネル、反応チャンバなどの数および複雑性を増加させることによって高められる。
【0005】
近年、流量制御、およびサンプルと支持分析構造との物理的相互作用という一般的な分野において、著しい進展があった。
【0006】
流量制御管理は、(たとえば界面動電流または電気泳動分離を誘発および/または制御するために)基板への電圧、電流、または電力のパターン化された印加を含むさまざまな機構を使用してもよい。また、これに代えて、流体流が、毛管現象引力によって、または差圧、音響エネルギなどの印加を通して機械的に誘発されてもよい。選択的な加熱、冷却、光または他の放射の照射、もしくは他の入力が、基板の周囲に分布する選択された場所で提供されて、所望の化学的および/または生物学的相互作用を促進してもよい。同様に、光または他の放射物、電気/電気化学信号、およびpHの測定値を基板から得て、分析結果を提供してもよい。これらの分野の各々において研究が進むにつれて、チャネルサイズは徐々に減少し、一方、チャネルネットワークは複雑性が高まっており、マイクロ流体システムの全体的な能力を著しく高めている。
【0007】
マイクロ流体工学技術/装置は、生物学的検定が統合されて小規模で達成されるように、微量の液体を制御および移送することができる。
【0008】
マイクロ流体工学は、生物学的な分離および検定手法を、掌の上に十分適合するほど小さい「チップ」上で多数の「実験」が達成可能となる程度にまで小さくしたものである。微量の溶媒、サンプル、および試薬がチップ上の狭いチャネルを通って攪拌され、そこで
それらは混合され、電気泳動、蛍光検出、免疫学的検定、または実際にほぼすべての伝統的な実験室方式などの手法によって分析される。
【発明の開示】
【発明が解決しようとする課題】
【0009】
今日では、多くの点で異なる多数の生成物が利用可能である。実験室チップはプラスチック、ガラス、石英またはシリコンからも作られてもよい。流体は、遠心力、機械的圧力または真空ポンプによって、慣性によって、もしくはいくつかの電気的方法のうちの1つによって駆動されてもよい。つまり、流体流は、機械弁、表面張力、電圧勾配、または電磁気力によっても、チップのまわりを迂回され得る。
【0010】
遠心力を用いて流体を駆動する手法では、スピン可能なディスクが使用される。ディスクの中には、従来のCDと同じ物理的フォーマットを有するものもあった。サンプルはディスクの内側の位置に配置され、ディスクが回転するにつれて生じる遠心力が、プラスチックに切込まれたチャネルを通してサンプルを押出し、高度の界面動電学的または機械的ポンピング構造を設計する必要性を回避する。
【0011】
以下の説明で明らかとなるように、この発明は、しばしば「ラボ・オン・チップ」と呼ばれる回転可能な、通常プラスチックのディスクに形成されたマイクロチャネルに基づくマイクロ分析システムに特に適用可能である(がそれに限定されない)。そのようなディスクは、微量の流体に対して分析および分離を行なうために使用可能である。コストを削減するには、ディスクがたった1種類の試薬または流体での使用に限定されず、さまざまな流体を扱えることが望ましい。
【0012】
さらに、サンプルの調製中、ディスクを修正せずに、ディスクによりユーザが流体またはサンプルの任意の所望の組合せの体積を計量配分できるようになることが、しばしば望ましい。回転可能なディスクに設けられた流体用のマイクロ分析装置は、たとえば、WO−0146465に記載されている。
【0013】
分析的手順はすべて、さらに他の決定のために要求される、または必要とされる情報を生成する目的で行なわれる。有用であるためには、情報はある品質目標を満たす必要がある。低品質の検定は、有用な情報を生成するためにしばしば数回の反復を必要とし、顧客にとって、実行により費用がかかる。これらは、不適切な情報に対して行なわれるプロセスおよび決定結果によって非常に異なる場合がある。
【0014】
発明の簡単な説明
とりわけ、分析プロセスは、それらがどのように設計されたかに従って機能する。しかしながら、プロセスは、サンプル組成、試薬挙動、洗浄手順などの変化によって生じ得る検定の異常挙動に敏感な場合がある。異常な結果がいかにして生じるか、およびその原因の知識を用いて、いかにしてそのようなエラーを識別し、最終結果を承認/否認する可能性を生み出すかについても学んでもよい。このように、データ生成プロセスにおける顕著な特性を評価することによって、結果が規格に従って生じたように見えるかどうかがわかる。異常に見える結果は、品質逸脱について警告されるべきである。
【0015】
不均質な検定および均質な検定双方において蛍光放射線を信号発生子として使用して、品質に関連する情報を抽出する、優れた可能性がある。不均質な検定では、粒子床のスキャンから生成された生データがある特性を満たすことが期待される。信号強度は、粒子床の上部区分でより高く、粒子床の底部で低くなるべきであり、床全体にわたって切れ目なく滑らかに変化するべきである。
【0016】
したがって、分析の正常または異常な挙動を、それがプロセス、サンプルまたは試薬によるものかどうかに関係なく示すある種の信号プロファイルを予測することが可能である。この発明の好ましい実施例の説明に関連して、正常または異常な信号プロファイルの数例を挙げる。
【0017】
マイクロ流体システムのユーザにとって、生データが「正常か否か」、許容可能か否かを立証できるようにする方法および自動システムを有することは、特に関心が高いことである。これは、粒子床にわたる信号の分布の説明を含む。正常な信号分布からの収差も、不具合の推定原因となるとして分類され得る。信頼できる結果を得るために、各個々の反応について品質の目安を作り出す手順が提案される。ユーザの観点からは、そのような情報は、反復されるサンプルの分析を信頼できる単一のサンプルへと減らす手助けをする。このように、プロセスの品質が高まると、分析にかかるコストが下がる。
【0018】
信頼値とはデータ信頼性の目安であり、ある結果が予想された完全な結果にどの程度近いかについての評価、たとえば、各列での信号分布が予想されたものにどの程度近いかについての評価である。分析プロセスについての高い信頼値は、高品質、および信頼性があるデータ結果を示す。これに対し、低い信頼値は、低品質、およびある特定のプロセスからのデータがプロセス中の1つ以上の妨害に依存して許容可能ではないかもしれないということを示す。プロセス中に起こり得る欠陥および問題に依存する妨害は、図4〜15においてより詳細に説明する。
【0019】
この発明の一般的な一目的は、マイクロ流体システムの性能を高めることである。
【0020】
この発明の別の目的は、結果が規格に従って生じたように見えるかどうかを分析可能なデータ生成プロセスにおける顕著な特性を評価するための方法、コンピュータプログラム製品、ニューラルネットワークおよびシステムを提供することである。
【0021】
この発明のより特定的な目的は、マイクロ流体装置およびマイクロ流体システムにおいて、プロセスの品質を判定するための、特にプロセスの信頼値を求めるための強力なツールを提供することである。
【0022】
また、この発明の一目的は、不均質な検定および均質な検定双方において蛍光放射線を信号生成子として使用して、品質に関連する情報を抽出する、優れた能力を提供することである。
【0023】
さらに別の一目的は、検定を分析するための自動方法およびシステムを提供することであり、この方法およびシステムは、実験室プロセスを最初から実施および実行し、プロセスの結果を分析し、プロセスおよび分析の結果を提示し、各検定について少なくとも1つの品質値、たとえば信頼値を提示する。
【課題を解決するための手段】
【0024】
この発明は、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値Cを求めるための方法であって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、上記方法は、信頼値(C)を求めるために、取得されたデータ情報をデータ処理するステップを含むことを特徴とする、方法を提供する。
【0025】
発明された方法の変形は、従属方法クレームおよび詳細な説明に含まれている。
【0026】
この発明の一局面によれば、データ処理中、信頼値(C)を求めるために、取得されたデータ情報のすべてまたは一部を用いて、少なくとも1つの特性パラメータ値が求められ、および/または計算される。
【0027】
この発明の別の局面によれば、データ処理中、取得されたデータ情報のすべてまたは一部を用いて、少なくとも1つの特性パラメータ値が求められ、および/または計算され、上記少なくとも1つの特性パラメータ値は、信頼値(C)を求めるための分類子への入力として使用される。
【0028】
この発明のさらに別の局面によれば、データ処理中、取得されたデータ情報のすべてまたは一部を用いて、少なくとも1つの特性パラメータ値が求められ、および/または計算され、上記少なくとも1つの特性パラメータ値は、信頼値(C)を求めるための分類子への入力として使用され、上記分類子はニューラルネットワークである。
【0029】
この発明はまた、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値を求めるためのシステムであって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、上記システムは、信頼値を求めるために、取得されたデータ情報をデータ処理するための手段をさらに含むことを特徴とする、システムも提供する。
【0030】
発明されたシステムの異なる実施例は、従属システムクレームおよび詳細な説明に含まれている。
【0031】
さらに、この発明は、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値を求めるためのコンピュータプログラム製品であって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、上記コンピュータプログラム製品は、コンピュータ読取可能および実行可能プログラムコード手段が内部に設けられたコンピュータ読取可能記憶媒体を含み、コンピュータ読取可能プログラムコード手段は、信頼値を求めるために、画像において取得されたデータ情報をデータ処理するためのコンピュータ読取可能プログラムコード手段を含むことを特徴とする、コンピュータプログラム製品を提供する。
【0032】
発明されたコンピュータプログラム製品の異なる実施例は、従属コンピュータプログラム製品クレームおよび詳細な説明に含まれている。
【0033】
加えて、この発明は、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値を求めるためのニューラルネットワークであって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、上記ニューラルネットワークは、請求項1〜10に記載の方法ステップの各々を行なうための手段をさらに含むことを特徴とする、ニューラルネットワークを提供する。
【発明の効果】
【0034】
この発明での一利点は、信頼できる結果を得るために各個々の反応について品質の目安を自動的に生成し、提示することである。ユーザの観点からは、そのような情報は、反復されるサンプルの分析を信頼できる単一のサンプルへと減らす手助けをする。このように、プロセスの品質が高まると、分析にかかるコストが下がる。
【0035】
さらに、この発明の一利点は、マイクロ流体システムの性能向上である。
【0036】
別の利点は、この発明が、マイクロ流体装置およびマイクロ流体システムにおいて、プロセスの品質を判定するための、特にプロセスの信頼値を求めるための強力なツールを提供することである。
【発明を実施するための最良の形態】
【0037】
この発明のより完全な理解のために、ここで、以下の説明を添付図面とともに参照する。
【0038】
発明の詳細な説明
この発明の範囲および精神から逸脱することなく、この出願に開示された発明にさまざまな実施例および修正がなされ得ることは、当業者には容易に明らかである。
【0039】
ここに使用されるように、“a”または“an”という単語は、文中および/または明細書中の「含む」という用語とともに使用する場合、「1つの」という意味を有するが、「1つ以上の」、「少なくとも1つの」、および「1つまたは2つ以上の」という意味とも合致する。ここに使用されるように、「回転する」という用語は、スピンするという意味を有する。さらに、「回転する」という用語は、ディスクの段階的回転も含んでいてもよいが、それに限定されない。
【0040】
ここに使用されるように、「試薬」という用語は、分析物を含むが、それに限定されない。
【0041】
ここに使用されるように、「円形に」という用語は、ディスクの中心のまわり(円周方向)を意味する。
【0042】
「複数のマイクロチャネル構造」という用語は、2つ、3つ、またはそれを越えるマイクロチャネル構造を意味する。通常、「複数」という用語は、≧10、たとえば≧50または≧100のマイクロチャネル構造を意味する。
【0043】
「ノイズ除去」および「ノイズ削減」という用語は、測定されたデータ(値)におけるノイズの寄与がゼロに削減されているか、または取るに足りないことを意味する。「減少」および「除去」という単語は文中交互に使用されるが、この明細書ではこの2つの単語の意味に違いはない。それらは同等であると見なされるべきである。
【0044】
マイクロ流体実験室システムは、ディスクに加え、制御ユニットとマイクロ流体機器とを含んでいてもよい。そのようなシステムはスタンドアロンシステムと呼ばれる。各システムはそれ自体のデータを有し、完全にスタンドアロンで作動する。システムとの相互作用は、関連するパーソナルコンピュータ(PC)で行なわれてもよい。
【0045】
別のシステムは、機器群に共通永続的格納先、たとえばデータベースを加えたものとして考えられ得る。多くの機器が、同じ一組のデータ(方法データ、マイクロ流体装置データなど)に対して作動可能である。システムとの相互作用はすべて、機器に接続されたコ
ンピュータで行なわれる必要がある。この第2のシステムはしばしば、分散型データベース解決策と呼ばれる。
【0046】
第3の解決策、分散型解決策では、システムは、機器群、共通永続的格納先(データベース)、および多数のクライアントとして考えられる。この解決策により、上述の分散型データベース解決策と同じ機能性に達する。加えて、機器に接続されていないコンピュータから、システムと相互作用する可能性がある。追加で提供される機能性の例を以下に挙げる。
・機器の遠隔監視。
・機器に特有ではない機能の実行(方法開発、処理データの評価など)。
【0047】
この第3の解決策により、処理を遠隔から、つまり機器に接続されていないコンピュータから制御(開始、休止、中止)することが可能である。
【0048】
オペレータ/ユーザは、制御ユニットから、マイクロ流体機器の性能を制御および監視できる。マイクロ流体機器は多数の異なるステーションを含み、各ステーションは、1つまたは多数の規定された動作を実行可能である。異なるタイプのマイクロ流体機器は、異なる種類または数のステーションからなる。したがって、動作の中には、あるタイプのマイクロ流体機器に対して提供されない、または適用できないものもある。
【0049】
動作は制御ユニットから開始される。
【0050】
図1は、制御ユニット110と機器120とを含むマイクロ流体システム100を概略的に示すブロック図であり、機器120は、サンプルおよび試薬ステーション130、洗浄ステーション140、液体移送ステーション150、マイクロ流体装置内での液体の移送を実現するための少なくとも1つのステーション160(たとえばスピナーステーション)、および検出器ステーション170を含む。
【0051】
制御ユニット110は、機器外の1つ以上のコンピュータ、および/または機器内の1つ以上の中央プロセッサ、特化コンピュータ、サーバ、パーソナルコンピュータ、デジタルプロセッサ、中央処理ユニットなどであってもよい。制御ユニットは、機器120およびその異なるステーションに、導体またはデータバス180を介して接続され、動作命令が、電気信号または光信号として送信されるか、もしくは、ステーション間で配信されるハードウェア回路への好適な予め定められたプロトコルに含まれる。
【0052】
サンプルおよび試薬ステーション130は、サンプル、試薬または他の液体を格納するための手段を含む。上記サンプル、試薬または他の液体は、ある種の容器、たとえばマイクロプレートまたはマルチウェルプレート、試験管立て、もしくは試験管に格納される。上記プレートは、小さな容器またはウェルの行列として設計されてもよい。上記プレートは、ウェルの数に依存して異なるサイズを有し得る。容器は、容器ホルダ、たとえば円形回転プレートであるいわゆるカルーセルに緩く固定されてもよい。
【0053】
液体移送ステーション150は、一度に少なくとも1つのサンプルまたは任意の他の予め定められた液体アリコートを、サンプルおよび試薬ステーション130から、たとえばスピン可能なディスクの形をしたマイクロ流体装置へ移送するロボット150aを有する。このステーションは、液体サンプルおよび他の液体の移送のための手段を有し、たとえば、シリンジポンプに接続された多数の注射針、または多数の硬いピンがサンプルの移送に使用されてもよい。上記針およびピンは、双方向において異なるチップ間距離を有する異なる数の行および列で構成されてもよい。別の代替例は、WO−9701085に記載されたマイクロディスペンサである。
【0054】
上記針およびピンは、サンプルおよび試薬の移送の合い間に洗浄溶液で洗浄されてもされなくてもよい。洗浄は、洗浄ステーション140に配置された手段によって行なわれる。
【0055】
マイクロ流体装置に計量配分された液体は、液体移送を実現するためのステーション160に関連する手段によって、装置内で運ばれる。このステーションは、マイクロ流体装置がスピンにより生じる液体搬送を可能にするようになっている場合、スピナーステーションであってもよい。マイクロ流体装置内で実行されたプロセスの結果は、検出器ステーション170に位置する検出用手段(検出器)によって判定される。
【0056】
円形のディスクに適合されたマイクロチャネル構造(301a、b、cなど)の一設計を図2に示す。これらの構造は、共通分布チャネル(302)および共通廃棄物チャネル(303)によってともに連結されている。共通対称軸のまわりのマイクロチャネル構造の向きは明らかである。ディスクの円周(304)は定位置マーク(305)を有する。組合された反応/検出マイクロキャビティまたはマイクロチャンバ(306a、b、cなど)の各々は、下流方向では共通廃棄物チャネル(303)と、上流方向では別個の連結部を介して共通分布チャネル(302)および別個の体積測定ユニット(307a、b、cなど)と連通している。検出区域(317a、b、cなど)が、各検出マイクロキャビティと関連付けられている。共通分布チャネル(302)は、その端の一方および中間位置で、注入ポート(それぞれ308および309)を所持している。別の種類の注入ポート(310)が、各体積測定ユニット(307a、b、cなど)に位置する。各マイクロチャネル構造(301a、b、cなど)はまた、共通廃棄物チャネル(303)への出口、および、共通分布チャネル(302)の残りの端での放出ポート(318)も有する。周囲空気への吸気口(311)が、共通通気チャネル(312)を介して共通分布チャネルに接続されている。周期空気への他の通気口(313および314)が、共通廃棄物チャネル(303)に、および、各反応/検出マイクロキャビティ(306a、b、cなど)と共通廃棄物チャネル(303)との間の接続マイクロダクトに配置されている。適切なバルブが、各マイクロチャネル構造(301a、b、cなど)の315および316に位置付けられている。
【0057】
図1に示すように、上記ステーションの各々は、制御ユニット110に接続され、多数の動作によって制御ユニット110から制御および監視される。ソフトウェア動作は、以下のようなある機能を達成するために行なわれるハードウェア命令の論理グループとして規定される。
・液体の搬送を実現する。たとえば、装置がスピン可能なディスクの形をしている場合、液体流を誘発するために装置をスピンさせる。
・サンプルを、特定の共通分布チャネルまたは特定のマイクロ構造に移送する。
・試薬を、特定の共通分布チャネルまたは特定のマイクロ構造に移送する。
・マイクロ流体装置を位置付ける。
・液体を、特定の時間、マイクロ構造のある位置で培養する。
・検出する。つまりマイクロ流体装置で実行された方法の結果を検出する。
【0058】
動作は多数のステップからなり得る。1つのステップは、たとえばスピン動作におけるランプといった、分割できない命令である。1つの組は、多数のこれらの動作を所望の順序でまとめることによって構成される。そのような1組は方法として規定され、機器内で行なわれるすべての部分を制御する。それは、マイクロ流体装置のタイプを指示し、1組の作用、動作を規定する。それは、たとえば、方法が細胞培養に関する場合、一定温度での培養といった機器外でのステップの実行のために、停止を指示してもよい。
【0059】
上述のように、制御ユニットは、マイクロ流体装置におけるサンプル調製、液体処理、さまざまな化学的および生化学的ステップなどを含むさまざまなプロセスを開始、実行、制御および停止することができる。さらに、制御ユニットは、マイクロ流体装置のスキャニング、分析結果についての検出、検出された結果のデジタルデータ情報への変換、およびデータ情報のデータ記憶装置への格納を開始、実行、制御および停止することができる。
【0060】
マイクロ流体装置のマイクロチャネル構造において分析プロセスを実行するためのマイクロ流体実験室システムの動作は、以下のステップを含んでいてもよい:
・分析プロセスを実行する;
・信号データについて、マイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって、分析プロセスのデータ情報を取得する;
・上記取得されたデータ情報を、多数の次元を含む画像として、スキャンされた各サーチ区域につき1画像を格納する。
【0061】
物質の生データ画像の生成および処理
粒子床の使用により検出可能なアルゴリズム、またはむしろ自動化された方法を、以下に提示する。このアルゴリズムは、スキャンされた当該各サーチ区域/検出区域/粒子床について開始されてもよい。
【0062】
ここでこの発明を、コンパクトディスク(CD)と同等のディスクフォーマットで、ディスク平面に垂直な対称軸を有し、かつ、粒子床を含む検出マイクロキャビティの各々の対称軸から半径流方向を有するマイクロ流体装置(図2参照)を含むある特定の例に関して、さらに詳述する。この種のマイクロ流体装置を以下にCDと呼ぶ。検出および測定された信号は、抗体蛍光色素共役(抗体−蛍光色素)からの蛍光であってもよい。各床は、ディスクの表面における検出区域を規定する。たとえばWO−02075312(ジャイロスAB(Gyros AB))を参照されたい。検出区域は、検出区域のまわりに規定された小さいゾーンも含むサーチ区域の一部である。この例に概説する原理は、他の装置にも適合され得る。この原理はまた、この文章の別の場所で述べるような他の種類の放射にも適用可能である。
【0063】
物質の生データ画像の生成
制御ユニットは、スキャニングおよび検出を制御するようプログラムされている。
【0064】
各サーチ区域は、放射能により生じる放射線、蛍光、化学発光、生物発光、酵素活性、光の散乱、光の吸収、光の反射といった、マイクロキャビティに存在する物質に由来する検出可能な物理的構造を検出できる検出器ヘッドによってスキャンされる。測定されたデータは、処理ユニットに接続された、または接続可能なデータストレージ、画像データストレージに格納され、処理ユニットはコントローラ手段に含まれても、または、別の可能な実施例でのように別個のコンピュータシステムに取入れられてもよい。各サーチ区域は、アドレスとして使用され得る識別子によって識別される。識別子は、システムおよびコントローラ手段が、CD上の単一の各サーチ区域およびその検出区域の場所を突止め、画像ストレージ内の対応する格納された測定データをリンクさせるようにする。
【0065】
ここで図3Aおよび図3Bを参照すると、各サーチ区域402は、予め規定された半径方向開始位置Xstart、予め規定された角度開始位置Ystart、予め規定された角度停止位置Ystop、および予め規定された半径方向停止位置Xstopを有する。データ収集の開始は、ある位置で、主として意図された検出区域の前にある角度および/または半径方向位置で始まり、同じ検出区域の後の位置で収集を終了する。サーチ区域はしたがって、検出区域404を包囲する外側区域406をカバーする。サーチ区域402は検出器によって、ディ
スクラップごとに半径方向にスキャンされる。半径方向開始位置Xstartは、サーチ区域のスキャニングが始まるとスピン開始位置Spinstart(図示せず)からカウントされるディスクラップ/回転の数であり、半径方向停止位置は、サーチ区域の最後の角度スキャニングが行なわれるとスピン開始位置からカウントされるラップの数である。角度方向におけるサーチ区域のスキャニングは、半径方向の開始位置によって規定されるラップ中に、角度方向における角度開始位置において開始し,当該角度方向は、上記ディスクのスピン方向と、上記CD上の定位置マークに対する検出器の位置とによって規定される。角度方向でのスキャニングは、角度停止位置で停止される。
【0066】
図3Aは、回転可能な装置のサーチ区域が通常、a)外側位置からCDの中心へと内側へ向かう際若干狭くなり、b)若干アーチ型である、という意味で概略的である。たとえば、各ラップについてのYstart位置が常に同じ角度位置にある(Ystop位置にも当てはまる)ことを比較されたい。
【0067】
ラップ中、角度開始位置から角度停止位置へ、サーチ区域からの収集データの流れは、ストレージに格納される測定データの対応する流れを生成する。これはラップごとに、半径方向開始値から半径方向停止値へと繰返される。コントローラ120の処理ユニットは、測定データを正しい識別された検出区域にリンクし、異なるサーチおよび/または検出区域からの測定値が混ざることはない。スキャンされた各サーチ区域は、対応する一組の収集された測定データを有する。処理ユニットはデータをそのような順序で、測定データの各組において位置ごとに編成する。したがって、画像プロセッサは、その組におけるある測定値の場所を突止めることができる。一組の測定値はしたがって、電子的に、および/またはデジタルで格納された画像に対して類似性を有する。画像は、画素と呼ばれる非常に小さい要素で規定される。各画素は、サーチ区域における測定区域の位置に対応している。
【0068】
スキャニング、検出および格納が終了すると、サーチ区域の測定データは、処理ユニットにより使用されるプリンタ/プロッタソフトウェアプログラムの使用により、三次元の図にプロット可能であり、ここで水平面は2つの次元xとyとによって、この場合、半径方向x軸とx軸に垂直な角度方向y軸とによって規定される。正のx方向は、検出区域404の入口408からその出口へと検出区域を通る主流方向(下流)として規定される。正のy方向は、半径(または流れ方向)に直交する/垂直なスキャニング方向として規定される。x軸およびy軸によって規定される水平面に垂直な第3の次元、z軸は、たとえば蛍光強度の測定値といった測定値の大きさである。測定データは、山と谷とを有する測定データの表面を規定する。上述のように、三次元の図は、各画素について規定される強度値を有する画像と本質的類似性を有しており、測定データの表面はしたがって、測定された信号をもたらす物質を含むサーチ区域/検出区域/粒子床の画像と呼ばれる。この出願の説明では、画像とは、サーチ区域/検出区域/粒子床に属する、格納された検出器測定データである。画素はここでは、サーチ区域/検出区域内の離散的測定区域として規定され、各画素は測定された強度値、画素値を有していてもよい。画像の解像度は、サーチ区域内のy方向での離散的測定点の数とx方向でのラップの数とに依存している。解像度は、測定点およびスキャニングラップの密度が増加するにつれて増加し、その結果、1つの画素の区域は減少する。電磁放射源がレーザである場合、可能な最小画素区域は、サーチ区域を有するレーザビームの最小断面によって限定される。
【0069】
サーチ区域のスキャニング中、画素強度は検出プロセスによって判定され、サーチ区域の生データ画像を表わすデジタル画素データとして格納される。
【0070】
サーチ区域/検出区域についての測定データの表面と基準面との間の、基準面の2つの軸によって規定される空間は、体積を構成する。この体積の全部または一部が、化学的プ
ロセスに対して望まれる目安、すなわち反応変数を表わしてもよい。この値は、数学的方法、たとえば検出区域の全区域、または統合区域とも呼ばれる1つのサブ区域410(図3A)、もしくは検出区域の多数のサブ区域にわたった測定データの加算または積分を用いることによって計算できる。時として、目的は、検出区域内部の、ここに正規化区域と呼ばれるサブ区域についての分量、すなわち画素の予め規定された分量を計算することである。これは、検出された構造間の差異を最小限に抑えるために行なわれる。この差異はとりわけ、検出区域からの蛍光などのバックグラウンド放射に依存する。
【0071】
図3Bは、詳細が図3Aと同様で、唯一の違いは、図3Bがいくつかの計算で使用されるサブ区域A1、A2およびA3の位置を示していることであり、この説明でそれを以下にさらに説明する。
【0072】
検出表面の理想的な画像では、区域は、検出器からの測定された生データ信号にノイズのあるバックグラウンドの寄与がないために、滑らかである。この画像は、物質信号からの測定データ、すなわち検出および測定された生のデータ信号への物質の寄与のみを含んでいる。実際には、物質の生データ画像は、測定された物質データおよびノイズデータを含む。ノイズは表面にノイズピークに似たでこぼこをもたらし、明らかに、1つまたは多くのノイズピークを有する区域における体積の計算は、化学的プロセスに対する真の目安をもたらさない。
【0073】
したがって、目安の計算前に物質の生データ画像におけるノイズの寄与をできるだけ減らすことが、時として必要である。
【0074】
物質の生データ画像における物質生データ情報からノイズを除去するための方法は、以前にWO−03056517から公知である。各画像は、検出マイクロチャンバとも呼ばれる1つの検出マイクロキャビティに、かつ、マイクロ流体装置のマイクロ流体構造の検出マイクロキャビティに存在する1つの物質に関連付けられている。物質生データ情報は、検出マイクロキャビティに関連付けられた検出区域に関連するサーチ区域をスキャン可能な検出器構成の使用によって取得される。この検出器構成は、サーチ区域から放射を発する、たとえば蛍光、発光といった上述の多数の検出可能な物理的構造のうちの少なくとも1つを検出し、検出可能な作用の大きさに比例する出力を生成することができる。この出力は、組となった物質生データとしてデータストレージに格納可能な測定データに変換される。この方法は、物質の生データ画像において異なるノイズ信号の寄与を任意の順序で段階的に除去するための以下のステップを任意の順序で含んでいてもよい:
・バックグラウンド放射を減少させる(ステップα);
・ピーク妨害を減少させる(ステップβ);
・サーチ区域内の検出区域の位置を突止める(ステップχ);
・バイナリ人工産物を除去する(ステップδ);
・検出区域の不要な区域を除去する(ステップε);
・ノイズのある画像にデフォルト検出区域を適用する(ステップφ)。
【0075】
ステップα〜φの各々は多数のサブステップを含む。ステップα〜φは1つのアルゴリズムとして見なされてもよいが、ステップα〜φのすべてが全画像について行なわれる必要はない。ステップの順序および種類は通常予め選択され、とりわけ、各個々のステップにおいて必要とされる感度および精度に依存する。一般に、高い感度が望まれる場合には、より多くのステップを含むことが必要とされる。
【0076】
バックグラウンド処理済画像はステップの結果であり、それをここにより詳細に提示する。
【0077】
ステップα:バックグラウンド放射を減少させ、バックグラウンド処理済画像を構築する。
【0078】
この目的は、画像に見え得る電子ノイズ、光ノイズ、およびダストノイズを除去することである。この方法は主として2つの変形を含む。
【0079】
第1の変形では、バックグラウンド放射画像が使用される。以下のステップが使用され得る:
・利用可能であれば、バックグラウンド放射画像にアクセスし、利用可能でなければ、バックグラウンド放射画像を生成する(ステップα′1);
・利用可能であれば、対応する物質の生データ画像にアクセスし、利用可能でなければ、物質の生データ画像を生成する(ステップα′2);
・2つの画像を相関させ、相関画像を生成する(ステップα′3);
・最大画素値の位置を特定する(ステップα′4);
・画像を正しく位置付け、対応する画素値を減算し、生成されたバックグラウンド処理済画像を格納する(ステップα′5)。
【0080】
この第1の変形をここでより詳細に説明する。
【0081】
第1の変形では、第1のステップ、ステップα′1は、たとえば、物質の分量を判定するための方法のステップb)の前に、ディスクをスキャンし、検出区域から測定信号を生じさせる物質の存在なしで放射、たとえば蛍光の強度を測定して、ディスクの検出区域/粒子床がたとえば抗体−蛍光色素で処理される前に、放射に関連する物質を保つことである。サーチ区域/検出区域はすべてスキャンされ、測定データの対応する組の各々がバックグラウンド放射画像に格納される。抗体−蛍光色素を用いる場合、対応する画像はバックグラウンド蛍光画像と呼ばれる。この画像は、バックグラウンド放射ノイズ信号および他のノイズ信号の測定データを含む。好ましい変形では、バックグラウンド放射画像についてのスキャニングは、放射をもたらす物質が検出マイクロキャビティに形成される、および/または保たれるステップのできるだけ近くで実行される。好ましくはないものの、製造業者は、たとえば同じ種類の多くのCDの平均に基づいたバックグラウンド放射画像を提供してもよい。
【0082】
第2のステップ、ステップα′2は、この第1の変形では、上述の物質の分量を判定するための方法のステップc)と同じである。物質はここでは検出マイクロキャビティ内に存在し、たとえば、抗体−蛍光色素などで処理後、洗浄された粒子床に保たれている。この画像は上述の物質生データ画像である。
【0083】
バックグラウンド放射画像および対応する物質生データ画像が既に存在し、利用可能に格納されている場合、スキャニングおよび検出プロセスによって画像を再度生成する代わりに、結局ただ、ステップα′1およびステップα′2の画像に(たとえばコピーまたは読出によって)アクセスする結果となる。
【0084】
2つの画像は同じ条件下で、たとえば検出原理が蛍光に基づくものである場合には同じレーザ出力および同じ検出器感度で、検出されるべきである。
【0085】
第1の変形の第3のステップ、ステップα′3は、2つの画像を二次元で相関させることであり、それは二次元相関性の使用によって相関画像を規定する。二次元相関性の使用は、信号処理の分野では周知であり、参考文献[1]の90〜92頁を参照されたい。こうして、このステップは相関画像をもたらす。
【0086】
変形の第4のステップ、ステップα′4では、相関画像において最大の強度値を有する画素の位置が特定される。これは単純な比較アルゴリズムを用いることによって実行可能であり、最近で最大の値が格納されて、以前の画素データのどれともまだ比較されていない次のデータ、たとえば強度値と比較される。最大画素値、最大強度値を有する画素の位置が格納され、次のステップ、ステップα′5で使用される。
【0087】
ステップα′5では、識別された画素位置を使用することによって、バックグラウンド放射画像が、相関画像の正しい位置へ動かされる。画像の重なり合う部分は、画素ごとに減算される。
【0088】
これら5つのステップは、新しい画像、バックグラウンド処理済画像をもたらす。
【0089】
物質生データ画像は、望まれる物質放射データを含む。測定信号を生じさせる物質をマイクロキャビティに導入することにより(ステップbの一部)、新しいノイズが全く導入されない場合、ノイズ除去のプロセスは停止されてもよい。
【0090】
第2の変形では、バックグラウンド放射データの中央値が使用される。以下のステップが使用されてもよい:
・物質生データ画像にアクセスする。または、物質生データ画像生成する(ステップα″1);
・バックグラウンド放射データについての中央値を判定する(ステップα″2);
・中央値を用いて物質生データ画像の画素値を減算し、バックグラウンド処理済画像を格納する(ステップα″3)。
【0091】
バックグラウンド放射を減少させ、バックグラウンド処理済画像を構築する第2の変形を、ここにより詳細に説明する。
【0092】
蛍光などのバックグラウンド放射を除去するための、特に検出区域外のサーチ区域に存在する電子ノイズおよび光ノイズを除去するためのこの第2の変形は、上述の5つのステップの代わりに使用できる。この代替的な変形は、サイズが大きい不要のオブジェクトが検出区域外になく、かつ、バックグラウンド信号強度が画像内で一定であるという条件下で、非常に良好に作用する。この変形は、ディスクが1回しかスキャンされないという利点を有しており、それを以下に説明する。
【0093】
この代替的な変形における第1のステップ、ステップα″1は、放射に関連する物質が検出マイクロキャビティに取入れられた後で始まるべきである。上述の物質の分量を判定するための方法では、これはたとえば、検出区域が抗体−蛍光色素で処理された後、すなわちステップcに対応する。上述のように、放射についてのサーチ区域のスキャニング中、物質生データ画像の画素値が検出され、求められて、デジタル画素データとして格納される。物質生データ画像が既に存在し、利用可能に格納されている場合、スキャニングおよび検出プロセスによって画像を再度生成する代わりに、結局ただ、画像をコピーする/読出す結果となる。
【0094】
第2のステップ、ステップα″2では、検出区域外のサーチ区域の少なくとも一部についての画素値の中央値が計算され、バックグラウンド放射値として、たとえばバックグラウンド蛍光についての値として使用される。中央値とは、バックグラウンド放射(強度)についての推定値である。
【0095】
ステップα″3では、画素がすべて処理されてバックグラウンド処理済画像が提供されるまで、物質生データは中央値の寄与で、たとえば画素ごとの減算によって減少される。
【0096】
潜在的に、中央値を求めるためのステップは、何か別の形の平均値を求め、この値を次のステップで中央値の代わりに使用することと置き換えられ得る。
【0097】
α′およびα″の双方の方法は、スキャンされた各サーチ区域についてのバックグラウンド処理済画像、すなわち、蛍光などのバックグラウンド放射が低減した画像を提供し、この革新的な方法の他のステップとは別個に、または他のステップと組合せて使用可能であるが、現時点では前者が好ましい。
【0098】
ステップβ:ピーク妨害を減少させる。
【0099】
この方法は、埃、化学および他の人工産物から生じる、たとえばファイバからのピークの減少といったピーク妨害を減少させる1つ以上のステップを含んでいてもよい。妨害ピークは通常、比較的高い振幅と比較的狭い分布とを有する。しかしながら、理想的な検出区域の画像は滑らかで、妨害ピークを全く含まない。
【0100】
以下のステップが使用されてもよい:
・ラプラシアンフィルタを二次元で使用することによって、以前に格納された画像、通常バックグラウンド処理済画像から、ラプラシアン処理済画像を生成する(ステップβ1);
・前のステップで作成された画像、通常バックグラウンド処理済画像から、妨害しきい値を計算する(ステップβ2);
・しきい値計算に使用された画像に妨害しきい値限度を適用することによって、バイナリコード化ラプラシアン処理済画像を生成する(ステップβ3);
・クラスタにおける開始点を見つける(ステップβ4);
・開始点を包囲する最小矩形区域を判定する(ステップβ5);
・各ピーク区域内の補間値を計算し、ピークの元データを代入し、妨害がフィルタ処理された画像を格納する(ステップβ6)。
【0101】
ピーク妨害を減少させるためのプロセスを、ここでより詳細に説明する。
【0102】
こうして第1のステップ、ステップβ1では、放射強度画像、たとえば上述のようなバックグラウンド処理済画像が、ラプラシアンフィルタによって二次元で処理されてもよい。これは、以前に参照文献[1]から公知の標準的な方法である。このステップの結果、バックグラウンド処理済画像におけるピークが増幅される。この結果はバックグラウンド画像における最大放射(強度)で正規化される。このステップはラプラシアン処理済画像を提供する。
【0103】
第2のステップ、ステップβ2では、ステップβ1で使用された画像から計算された、確率的バックグラウンドノイズの標準統計関数平均および標準偏差の使用によって、妨害しきい値限度が計算される。このステップは、画像の妨害ピークを強調する。
【0104】
第3のステップ、ステップβ3では、ラプラシアン処理済画像がバイナリコード化される。コード化プロセスでは、しきい値限度に等しいかまたはそれよりも高い画素強度/値は、2つの対応するバイナリ値の一方、たとえば「1」または「正」に設定され、妨害しきい値限度未満の画素強度は、バイナリ値の他方、たとえば「0」または「負」に設定される。ステップβ2で求められた判定済妨害しきい値限度を、ステップβ3でコード化のために使用してもよい。このステップは画像を生成し、ピークの高強度画素は、クラスタとも呼ばれる群として現われる。
【0105】
第4のステップ、ステップβ4では、バイナリラプラシアン処理済画像のクラスタからの位置情報を用いることによって、最大値を有する各ピークでの画素を見つけるために、ラプラシアン処理済画像が処理されてもよい。クラスタでの最大値を有する各画素は、中心かつ開始点であると規定される。クラスタの他の画素は、バイナリラプラシアン処理済画像においてローに設定される。このステップはクラスタ画像をもたらす。
【0106】
第5のステップ、ステップβ5では、異なる区域サイズを用いた反復型検査によって最小矩形区域を判定するために、クラスタ画像において規定された開始点が使用される。前のステップでの規定に従って、かつ以前に行なわれたラプラシアンフィルタ処理の結果として、最小矩形区域が負の強度値またはゼロ値を有する画素しか含まない場合、ラプラシアン処理済画像に作用するこの反復は停止される。上記画素は対応する開始点を包囲し、対応する妨害ピークの位置、区域、およびピーク区域外のボーダー画素を規定する。
【0107】
第6のステップ、ステップβ6では、バックグラウンド処理済画像の妨害ピークは、対応するピークのボーダー画素間の補間値を用いて各ピーク区域内の元データを代入することによって除去される。この補間値は、適切な補間関数の使用によって計算され、線形関数および非線形関数の双方が可能な選択肢である。
【0108】
プロセスはこうして、検出区域の放射強度、たとえば蛍光強度の「妨害フィルタ処理済画像」を生成した。
【0109】
ステップχ:グローバルしきい値を求める。
【0110】
この目的は、測定された物質信号、すなわち検出区域における物質からの信号をバックグラウンド信号から分離するグローバルしきい値を求めることによって、妨害フィルタ処理済画像などの放射強度画像をバイナリにすることである。たとえば、検出区域画素はバイナリハイ、たとえば「1」と等しく、画像の残りはバイナリロー、たとえば「0」と等しくなるべきである。
【0111】
以下のステップの目的は、有効なグローバルしきい値を求めることである。これは、異なるしきい値を検査する反復によって行なわれる。グローバルしきい値は、検出区域に接続されていないサーチ区域の一部において、検出区域の画素よりも強度が高い画素が少ししかない場合に有効である。
【0112】
以下のステップが使用されてもよい:
・y合計グラフを生成する(ステップχ1);
・y合計グラフの中央値フィルタ処理を行なう(ステップχ2);
・検出区域の中央位置を判定する(ステップχ3);
・検出区域の、半径方向に向けられたエッジを判定する(ステップχ4);
・x合計グラフを生成する(ステップχ5);
・x合計グラフの中央値フィルタ処理を行なう(ステップχ6);
・エッジ曲線(相関性)を求める(ステップχ7);
・エッジ曲線における妨害ピークを抑制する(ステップχ8);
・検出区域の開始位置および終了位置を判定する(ステップχ9);
・グローバルしきい値の開始値を求める(ステップχ10);
・グローバルしきい値を、正しい検出区域幅を与える値に調節する(ステップχ11);
・グローバルしきい値の使用により、バイナリコード化された妨害フィルタ処理済画像を生成する(ステップχ12)。
【0113】
ここで、このプロセスをより詳細に説明する。
【0114】
第1のステップ、ステップχ1では、放射強度画像、典型的には妨害フィルタ処理済画像において、画素値が半径方向においてライン毎に集約され、放射強度、たとえば蛍光強度のy方向(スピンするディスク上の角度方向)における一次元y合計グラフが得られる。グラフ上の各y座標は、同じy座標を有する半径方向の画素値の合計となる。
【0115】
第2のステップ、ステップχ2では、y合計グラフが、たとえば中央フィルタ関数を用いて、妨害ピークを除去するようフィルタ処理される。
【0116】
第3のステップ、ステップχ3では、y方向(スピンするディスク上の角度方向)における検出区域の中心が、相関性の使用によって、かつフィルタ処理されたy合計グラフと相関長への入力値としての公知の検出区域幅とを用いて、計算され、位置が特定される。これは通常、1つの大きなピークを有するグラフを与えるはずである。
【0117】
第4のステップ、ステップχ4では、最大ピークの中心が検出区域の中心に設定される。ここで、中心および検出区域/粒子床幅についての公知のデータの使用によって、粒子床エッジの位置および半径方向の広がりを計算することができる。これにより、半径方向に向けられたボーダー/エッジ画素が公知となる。
【0118】
第5のステップ、ステップχ5では、前のステップで求められた境界(ボーダー)を用いて、放射強度が画像においてy方向(スピンするディスク上の角度方向)で集約され、放射強度のx方向(半径方向)におけるx合計グラフ(半径方向合計グラフ)が得られる。画素値の合計はステップχ1と同様に行なわれるが、同じ平面において直交する方向において行なわれる。
【0119】
次のステップ、ステップχ6では、x合計グラフが、中央値フィルタ関数を用いてフィルタ処理され、妨害ピークが除去される。
【0120】
第7のステップ、ステップχ7では、x方向における検出区域の開始が、ステップ関数とフィルタ処理されたx合計グラフとの相関性の使用によって判定される。数学的プロセスが、図9に示すエッジ曲線をもたらす。
【0121】
ステップχ8では、入口に対向して位置するエッジに近い妨害ピークが、ランプ関数を用いてエッジ曲線を乗算することによって抑制される。
【0122】
ステップχ9の目的は、(ステップχ8からの)フィルタ処理されたエッジ曲線における正の最高ピーク中心を見つけて最小検出区域長を用いることによって、検出区域の開始位置を見つけ、検出区域の終了位置を計算することである。
【0123】
検出区域エッジ、ボーダー画素の近似位置はここで公知となる。
【0124】
第10のステップ、ステップχ10では、グローバルしきい値が、画像処理のための最適なしきい値手法(参照文献[1]、360頁から開始)の使用によってここで求められる。バックグラウンドピークおよび粒子床ピークは同じ分散で正規分布していると仮定する。妨害フィルタ処理済画像から、推定バックグラウンド強度を、(区域A1+A3での中央バックグラウンド強度、または区域A2での中央強度バックグラウンド)の最大値として計算する。区域A1、A2およびA3の位置および向きを図3Bに示す。推定物質強度を検出区域の中央値として計算する。反復ステップについての開始値を、推定バックグラウンド強度と推定物質強度との平均として計算する。
【0125】
ステップχ11では、グローバルしきい値が、推定物質強度により規定される最大強度値と推定バックグラウンド強度により規定される最小値との間で反復調節され、検出区域の近似位置内部のy方向(角度方向)での画素の平均数が検出区域幅と等しくなるようにされる。
【0126】
ステップχ12では、格納された画像、特に格納された妨害フィルタ処理済画像をバイナリコード化して、バイナリコード化妨害フィルタ処理済画像にするために、計算されたグローバルしきい値が使用される。
【0127】
ステップδ:バイナリオブジェクトを検出区域外に除去する。
【0128】
以下のステップδ1〜δ2の目的は、妨害をすべて検出区域外に除去することである。以下のアルゴリズムは、オブジェクトがすべて1、すなわちバイナリハイに設定されている、バイナリコード化された妨害フィルタ処理済画像のデータを処理する。さらに、近似計算された検出区域位置のボーダー内には除去すべきオブジェクトがなく、検出区域が画像の最大区域である、と仮定する。
【0129】
第1のステップ、ステップδ1は、バイナリコード化された妨害フィルタ処理済画像においてオブジェクトをすべてラベル付けすることであり、各オブジェクトの接続された画素の数、すなわち区域が判定される。ラベル付けは、画像処理において公知の方法である。
【0130】
第2のステップ、ステップδ2は、近似検出区域位置内の最大オブジェクト以外はすべて除去することにより、バイナリ検出区域画像を生成することである。
【0131】
ステップε:検出区域の不要な区域を除去する。
【0132】
この目的は、時として、検出区域内の「正規化された」区域についての量、すなわち予め規定された量の画素を計算することである。これは、同じマイクロ流体装置における検出区域間の差異を最小限に抑えるために行なわれる。この差異は、とりわけ、検出区域からのバックグラウンド放射、たとえば蛍光に依存する。検出区域内の強度信号の3D分布が、検出区域長の小さな変動とは無関係であると仮定する。物質信号は、対応する検出マイクロキャビティの入口に最も近いかもしれない検出区域の部分から生じる。使用されるアルゴリズムは、CDの内側部分から始まるバイナリ検出区域画像における正規化区域((最小検出区域長)×(検出区域幅))内のみに画素を含む新しいバイナリ画像を生成するためのプロセスである。
【0133】
第1のステップ、ステップε1は、バイナリ検出区域画像において正規化区域((最小検出区域長)×(検出区域幅))の場所外のバイナリハイと示された画素をすべてバイナリ「ロー」に設定することによって、正規化区域画像を生成することである。
【0134】
第2のステップ、ステップε2は、発明されたプロセスにおいて以前に生成され格納された妨害フィルタ処理済画像、および正規化区域画像における各対応画素を互いに乗算し、正規化区域に対して計算、たとえば積分を行なうことである。
【0135】
ステップφ:ノイズのある画像にデフォルト検出区域を適用する。
【0136】
物質信号を隠す、非常にノイズのある画像については、上述の方法は適切には、または全く機能しない。処理済画像がすべて検出区域の同じ組、たとえば同じCDから生じる場
合、以下のアルゴリズムが作用する。検出区域はその場合、角度位置において良好に、半径方向においてかなり良好に規定される。
【0137】
サーチ区域内の検出区域の位置を特定するアルゴリズムの最中、信頼度が高い検出区域についての位置はすべて格納される。
【0138】
ノイズのある画像にデフォルト検出区域を適用するための方法は、以下のステップを含んでいてもよい:
ステップφ1:高い信頼度基準を満たす、判定された検出区域位置(ステップχ)をすべて自動的に保存する;
ステップφ2:平均検出区域位置を計算する;
ステップφ3:1つ以上の予め定められた条件が満たされた場合に、平均検出区域位置を自動的に使用する。
【0139】
検出区域についての平均位置は、以下の条件をすべて満たす計算された検出区域すべてに対して自動的に適用される。
・その角度開始位置と平均開始位置との差が、[量]×[検出区域幅]を越えており、式中、[量]は0−1で選択される。
・正規化区域画像における、全半径についての角度方向でのバイナリハイ画素の平均個数が、[量]×[検出区域幅]未満であり、式中、[量]は0−1で選択される。
・角度停止位置と角度開始位置との差が[量]×[検出区域幅]よりも大きく、式中、[量]は1−10で選択される。
・正規化区域画像における、全半径についての角度方向でのバイナリハイ画素の個数が、[量]×[検出区域幅]×[最小検出区域長]未満であり、式中、[量]は0−1で選択される。
【0140】
画像データの分析
この発明は、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから信頼値を求めるための方法であって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納される方法に関する。各画像は、サーチ区域の平面(二次元)における画素の場所/アドレスと、スキャニング動作により提供されるその画素の場所についての少なくとも1つの検出/測定された測定値、たとえば蛍光強度とによって形成される。物質生データ画像において物質生データ情報からノイズを除去するための異なるステップα−φを、すべて一緒に、または選択されたステップのみ使用して、ノイズが減少した画像を生成してもよい。
【0141】
上述のように、ノイズを除去する方法におけるステップα−φの最中、多数の異なる画像が作成される。スキャンされた生データ画像を含むこれらの画像の各々は、以下に説明する信頼値を求めるためのプロセスにおいて使用されてもよい。
【0142】
この方法は、少なくとも1つの信頼値を求めるために、取得されたデータ情報をデータ処理するステップを含む。この発明の一実施例では、上記少なくとも求められた信頼値は、各画像について、スクリーン、ブラウン管(CRT)ディスプレイ、液晶ディスプレイ(LCD)または他の表示装置、もしくはプリンタなどの出力装置上に提示されてもよい。
【0143】
この発明の異なる実施例に従って信頼値を求める場合、格納された画像全体、または格納された画像の一部のデータ情報が仕様されてもよい。
【0144】
この発明の一実施例では、信頼値は、画像における信号データ分布によって求められる。
【0145】
信頼値を求めるための異なるアルゴリズム例
以下、文字Cで示される信頼値は、データ情報である画像内容、たとえば画像の強度信号分布を用いた計算により、または画像内容の分析により、もしくは分析および計算の組合せにより、求められる。Cは、画像毎、検定毎などで変わる変数である。
【0146】
以下に、信頼値を計算する3つの異なる方法を説明する。
【0147】
すべての例において、信頼値Cは最初、1に設定されている。信頼値の範囲は0−1である。
【0148】
例1:電子的に飽和した信号
1.最大可能強度の99.5%よりも強い、バックグラウンド処理済画像(上述)における(画素の個数)、飽和画素の個数Npsを発見する。
2.飽和画素の個数Npsを画像サイズAIで除算することによって、飽和画素の正規化個数NpsNを求める。
NpsN=Nps/AI
3.信頼値
【数1】
に従って、信頼値を修正する。
【0149】
このアルゴリズムのC、CMod1は、格納された画像のデータがどれくらい、電子的に飽和した信号として規定された問題または欠陥に依存しているかを示す(図9参照)。
【0150】
例2:ノイズピーク
1.上述のようなアルゴリズムβのステップ(特にステップβ4を参照)を用いることによって、ノイズピークについての開始点を計算する。
2.ここにノイズピーク強度アレイと呼ばれるノイズピーク強度のアレイを、各ノイズピーク位置についてのバックグラウンド処理済画像(上述)から強度を計算することによって求め、バックグラウンド処理済画像における最大強度IMAXを求め、アレイについて、最悪の妨害の予め規定された最大個数nd(デフォルトは10に設定)、この場合、最高ノイズピークを選択する。
3.ノイズピーク強度IP(ノイズピーク開始点画素)がすべて加算され、バックグラウンド処理済画像における最大強度IMAXで除算されたものの合計として、ノイズピーク強度SIPを計算する。
SIP=Σ(IP(ノイズピーク開始点画素)/IMAX)
4.ノイズピーク強度SIPを許容妨害の予め規定された最大個数nd(デフォルトは10に設定)で除算することによって、ノイズピーク正規化強度SIPNを計算する。
SIPN=SIP/nd
(このアルゴリズムは、許容妨害の最大個数を越えて考慮することはない。)
5.式CMod2=C*(1−0.5*SIPN)に従って、Cを修正する。
(たとえば、画像において最高強度を有するノイズピークが10個ある場合、信頼度は半減する。)
【0151】
このアルゴリズムのC、CMod2は、格納された画像のデータがどれくらい、ノイズピー
クとして規定された問題または欠陥に依存しているかを示す(図7参照)。
【0152】
例3:ランダムノイズ
1.一定のバックグラウンドノイズ強度IBCを、ステップχ10から、IBA1A3(区域A1+A3の中央バックグラウンド強度(図3b、および説明内の対応する文を参照))またはIBA2(区域A2における中央強度バックグラウンド(図3b、および説明内の対応する文を参照))の最大値として設定する。
2.IBSTDA1およびIBSTDA3の最小値を計算し、選択することによって、バックグラウンド強度標準偏差IBSTD、バックグラウンドstdを、計算する。ここで、IBSTDA1は区域A1の強度標準偏差であり、IBSTDA3は区域A3の強度標準偏差である。
3.IBCまたは2*IBSTDの最大値として、バックグラウンドノイズIBを設定する。
4.バックグラウンドノイズIBを、画像(検出区域)の強度中央値を用いた推定物質強度値、Imvで除算したものとして、正規化バックグラウンドノイズIBNを計算する。
IBN=IB/Imv
5.CMod3=C*(1−(0.3*IBN))に従って、Cを修正する。
【0153】
このアルゴリズムのC、CMod3は、格納された画像のデータがどれくらい、ランダムノイズとして規定された問題または欠陥に依存しているかを示す(図10参照)。
【0154】
当業者であれば、上述の例における異なる式の係数は、この発明の範囲を限定しない例としてのみ考慮されるべきであること、および、値の好適な範囲内で設定され得ることを理解するであろう。
【0155】
信頼値の設定
したがって、画像データを分析する際、妨害のいくつかのケースが取扱われ得る。したがって、この発明の一実施例に従った方法は、この説明で先に述べたような格納された画像のデータ情報により、画像の検出された問題またはある欠陥に関連する信頼値を求めるステップをさらに伴う。問題/欠陥の種類と、1つの検出された問題/欠陥または検出された問題/欠陥の組合せによって生じる妨害の量とを検出できるよう、多数の異なる信頼度計算が実行されてもよい。
【0156】
起こり得る問題/欠陥の種類は、異なる条件に依存する。たとえば、反応マイクロチャンバ/マイクロキャビティが、上記データ情報を取得した源である固相または通常均質な溶液を含む場合である。
【0157】
反応マイクロチャンバが、上記データ情報を取得した源である固相を含む場合、上記固相は、たとえば、
a) 反応チャンバの壁の一部、または、
b) 多孔質床、たとえば多孔質モノリシックプラグ、または多孔質粒子もしくは非多孔質粒子の充填床、または、
c)懸濁粒子、
であり、データ処理ステップは、
・乾燥した床、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・ノイズピーク、
・床の孔、
・電子的に飽和した信号、
・洗浄不良、
・抗体の捕捉不良、
・化学的に飽和した信号、
・ランダムノイズ、
という問題および欠陥のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値Cを設定するステップをさらに伴う。
【0158】
反応マイクロチャンバが、上記データ情報を取得した源である、通常均質な溶液を含む場合、データ処理ステップは、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・不均一な信号分布、
・電子的に飽和した信号、
・ランダムノイズ、
という問題および欠陥のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値Cを設定するステップをさらに伴う。
【0159】
以下の図は、取扱う公知の妨害をすべて示している。黒い点が妨害である。粒子床の始まりとは、CDの内側部分から見える最初の粒子である。粒子床の終わりとは、CDの外側部分から見える最初の粒子である。
【0160】
図4:乾燥した床の画像は、強度が非常に高い画素の小さなグループ(図では黒)と、それらの間の強度が非常に低い画素(図では白)とによって特徴付けられる。非常に高い強度の画素は粒子床区域の内部に位置すべきである。粒子床区域は通常、画像のバックグラウンドよりも高い強度を有するべきである。
【0161】
図5:角度方向における較正不良は、期待される構造幅を有するバックグラウンドよりも強度が高い既存オブジェクトがないことによって特徴付けられる。または、オブジェクトが画像の角度方向エッジの一方に位置する。これは、1つのCD上のほぼすべての画像について同一であるべきである。
【0162】
図6:半径方向における較正不良については、粒子床が画像の外側CDエッジまたは内側CDエッジに位置する。これは、1つのCD上のほぼすべての画像について同一であるべきである。
【0163】
図7:ノイズピークは、通常小さな画素区域を有する非常に高い強度の(しばしば画像において最高の)ピークによって特徴付けられる。埃および化学的人工産物がノイズピークを作り得る。
【0164】
図8:床の孔の画像は、粒子床外のバックグラウンドに近い強度レベルを有する粒子床内の比較的大きな区域によって特徴付けられる。
【0165】
図9:電子的に飽和した強度信号を有する画像では、1つまたはいくつかの画素が、電子機器からの最大可能値と同一である(画像内の黒い区域)。
【0166】
図10:画像のランダムノイズ問題は、構造幅と通常の粒子床長さとを有する有意な信号がまったくないことによって特徴付けられる。
【0167】
以下の図は、画像の境界(またはボーダー)の1つからy方向(スピンするディスク上の角度方向)における画像での放射強度を集約することによって計算された合計グラフを示している。各ボーダー画素(ボーダー上の画素)について、対応するボーダー上の画素を含む、角度方向における同じ水平線上にある全画素の強度が集約される。グラフは、角
度集約強度の変動を、半径方向の関数として示している。
【0168】
図11:画像の通常強度信号分布は、粒子床の始まりにおける大きな信号ピークによって特徴付けられる。このピークは連続的に下がり、粒子床からの信号のみを有して終わる。それはもう1度、より低い粒子床へと下がり、画像の外側部分で、バックグラウンドからの信号のみを有して終わる。
【0169】
図12:蛍光液体は、期待される信号ピークと比較して、CDの内側部分に向かう、バックグラウンドよりも高い平坦な強度レベルによって特徴付けられる。
【0170】
図13:化学的に飽和した信号画像は、粒子床の始まりでは信号強度が比較的長い距離にわたってほぼ同じレベルの高さを有し、粒子床および画像の終わりに向けて連続的に強度が下がることによって特徴付けられる。
【0171】
図14:洗浄不良の問題は、期待された信号ピークの後で、列の外側部分に向け、画像の信号強度が増加することによって特徴付けられる。増加した信号は、粒子床が終わると急速に降下する。
【0172】
図15:サンプル内に存在するヒト抗マウス抗体(HAMA)によって、サンドイッチ検定における抗体を捕捉および検出する架橋結合である。HAMA抗体の存在は、サンプルの分析物内容を誇張する。それは、画像の始まりに位置していない幅広いピークと、粒子床の終わりの比較的高い強度とによって特徴付けられる。固相に対する捕捉不良、または、固相へのラベル付けされた反応物質/試薬の不要な結合である。捕捉不良は、捕捉反応物質/試薬の不良で、および/または、捕捉ステップ中に反応マイクロチャンバを通る流量が高過ぎたことで説明される。不要な結合は、分析物以外のサンプル反応物質の望ましくない結合と、そのようなサンプル反応物質への、ラベル付けされた反応物質のその後の結合とによって説明され得る。典型的な一例は、同じ種の捕捉抗体およびラベル付けされた抗体を利用して、この特定の種(HAMA−抗体)に対して敏感な個人から得たサンプルにおける分析物を検定するためのサンドイッチ検定である。
【0173】
この発明はまた、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから信頼値Cを求めるためのシステムであって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、上記システムは、信頼値を求めるために、取得されたデータ情報をデータ処理するための手段をさらに含む、システムにも関する。上記システムはコンピュータ装置を含み、上記データ処理するための手段は、発明された方法のステップを上記コンピュータ装置に実行させるためのコンピュータプログラム読取可能コードを含むコンピュータプログラムソフトウェアとして実現されてもよい。
【0174】
データ処理するための手段は、格納された画像全体または格納された画像の一部のデータ情報を使用して信頼値を求めるための手段をさらに含む。
【0175】
システムは、信頼値Cを提示するための手段をさらに含んでいてもよい。発明されたシステムの一実施例は、信頼値に基づいて、結果が許容可能か許容不能かを提示するための手段を含む。
【0176】
さらに、システムは、画像のデータ情報により、画像の検出された問題またはある欠陥に関連する信頼値を設定するための手段を含んでいてもよい。
【0177】
反応マイクロチャンバが、上記データ情報を取得した源である固相を含む場合、上記固相は、
a) 反応チャンバの壁の一部、または、
b) 多孔質床、たとえば多孔質モノリシックプラグ、または多孔質粒子もしくは非多孔質粒子の充填床、または、
c)懸濁粒子、
であり、データ処理するための手段は、
・乾燥した床、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・ノイズピーク、
・床の孔、
・電子的に飽和した信号、
・洗浄不良、
・抗体の捕捉不良、
・化学的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するための手段をさらに含む。
【0178】
反応マイクロチャンバが、上記データ情報を取得した源である、通常均質な溶液を含む場合、データ処理するための手段は、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・不均一な信号分布、
・電子的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するための手段をさらに含む。
【0179】
発明されたシステムの一実施例では、データ処理のための手段は、画像方向の1つにおける信号データを集約した結果であるグラフから、サーチ区域についての信頼値を求めるための手段を含む。たとえば、図11は、画像の境界(またはボーダー)の1つからy方向(スピンするディスク上の角度方向)における画像での放射強度を集約することによって計算された合計グラフを示している。各ボーダー画素(ボーダー上の画素)について、対応するボーダー上の画素を含む、角度方向における同じ水平線上にある全画素の強度が集約される。グラフは、角度集約強度の変動を、半径方向の関数として示している。
【0180】
この発明はまた、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから信頼値を求めるためのコンピュータプログラム製品であって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、上記コンピュータプログラム製品は、コンピュータ読取可能プログラムコードが内部に設けられたコンピュータ読取可能記憶媒体を含み、コンピュータ読取可能プログラムコード手段は、発明された方法、請求項1〜10に記載のステップの各々を行なうためのコンピュータ読取可能プログラムコード手段を含むことを特徴とする、コンピュータプログラム製品にも関する。
【0181】
コンピュータ読取可能記憶媒体は、記録媒体、ハードディスク、コンピュータメモリ、読出専用メモリ(ROM)、プログラマブル読出専用メモリ(PROM)、消去可能プログラマブル読出専用メモリ(EPROM)、フラッシュメモリ、ランダムアクセスメモリ(RAM)、リムーバブルデータストレージ、または電気搬送信号のいずれであってもよい。リムーバブルデータストレージは、フロッピー(登録商標)ディスク、ZIP(登録商標)、CD(コンパクトディスク)、フラッシュメモリ、または磁気カードもしくは磁気テープのいずれであってもよい。
【0182】
ニューラルネットワークの使用によって信頼値を求めるための方法
好ましい別の実施例では、分類にニューラルネットワークが使用される。上述のように、物質生データ画像の信頼度が高いか低いかが分類できることは、時としてある種重要である。これは、予め訓練された多層パーセプトロンニューラルネットワークで達成可能であり、それは、「ニューラルコンピューティング入門」("Neural computing, an introduction")R.ビール(Beale)およびT.ジャクソン(Jackson)、1990年発行(ISBN 0−85274−262−2、IOPパブリッシング社(IOP Publishing Ltd.)、テクノハウス(Techno house)、レッドクリフウェイ(Redcliffe way)、ブリストル(Bristol)BS1 6NX UK)という書籍(参考文献2)に記載されている。63頁を参照されたい。この多層ネットワークは、1つまたは2つの隠し層を有する(参考文献2、67頁)。アプリケーションスペシャリストは、訓練および制御データの組を分類する。ニューラルネットワークは、参考文献2の73頁に従って訓練される。ニューラルネットワークへの入力は、以下の小見出しにある計算を使用する。
【0183】
この発明はまた、マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから信頼値を求めるためのニューラルネットワークであって、そこから分析プロセスのデータ情報が、信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、上記サーチ区域は分析プロセスの結果を含み、上記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、システムは、請求項1〜10に記載の方法ステップの各々を行なうための手段をさらに含む、ニューラルネットワークにも関する。
【0184】
入力からの出力は、信頼度に対応する0から1の値である。
【0185】
この説明において前述したように、問題/欠陥の種類と、1つの検出された問題/欠陥または検出された問題/欠陥の組合せによって生じる妨害の量とを検出できるよう、多数の異なる分析および計算が実行される必要があり得る。発明された方法およびシステムに従って、ある欠陥を多数の他の欠陥から分離するには、多数のパラメータが規定および計算され、ここで、特定のまたは特徴的なパラメータの各々は、ある特定の特色を捕捉するよう設計される。上記パラメータは、1組の画像特性、特徴セットを形成する。上記パラメータ、または特徴セットは、計算された後、この発明の一実施例ではニューラルネットワークである分類子への入力データとなる。
【0186】
この発明の一局面によれば、信頼値(C)を求めるために、取得されたデータ情報のすべてまたは一部を用いて、少なくとも1つの特性パラメータ値が求められ、および/または計算される。
【0187】
この発明の別の局面によれば、信頼値(C)を求めるために、取得されたデータ情報のすべてまたは一部を用いて、少なくとも1つの特性パラメータ値が求められ、および/または計算され、上記少なくとも1つの特性パラメータ値は、分類子への入力として使用される。
【0188】
この発明のさらに別の局面によれば、信頼値(C)を求めるために、取得されたデータ情報のすべてまたは一部を用いて、少なくとも1つの特性パラメータ値が求められ、および/または計算され、上記少なくとも1つの特性パラメータ値は、分類子への入力として使用され、上記分類子はニューラルネットワークである。
【0189】
パラメータを設計する元となる一組の画像特性は、以下のとおりである。
【0190】
・ピーク妨害、
・電子的飽和、
・洗浄不良、
・捕捉抗体不良、
・ランダムノイズ、
・滑らかな信号、
・流れ抑制、
・マイクロ流体装置の材料から生じる妨害信号。
【0191】
上述の各項目について、手元の画像がどの程度これらの特性からなるかを計算するアルゴリズムが設計されている。このアルゴリズムを以下に詳細に説明する。
【0192】
電子的に飽和した信号
この発明の一実施例によれば、分類および信頼値は、例1のステップ1および2を含むアルゴリズムで計算されたパラメータNpsNによって求めることができる。
【0193】
別の実施例によれば、分類および信頼値は、以下に説明するアルゴリズムによって計算される所望のパラメータによって求めることができる。最大振幅(正規化されている場合、100%、または1に等しい)を有する信号を持つ画像は飽和している。飽和の程度に依存して、画像は良好であると判断される場合もあり、または、価値がないとみなされることもある。
【0194】
このアルゴリズムは以下のように作用する。
【0195】
検出区域内で、最大強度のたとえば95%を超える強度を有する画素の合計である飽和画素合計が求められる。飽和画素合計を区域内の画素の総数で除算することによって、飽和画素の商が計算される。上記商を100で乗算することによって、飽和画素比率rが与えられる。最後に、計算されたrが、以下の特性パラメータを与えるシグモイド関数における入力として使用される。
【0196】
【数2】
【0197】
k=10に設定することにより、急なシグモイドが得られ、それは、ほぼ5までのrの値についてはゼロであり、5よりも若干大きい値については1である。
【0198】
例:
r=2%である場合、それは選択された5%よりも小さく、したがって画像は比較的飽和濃度が低く、シグモイド関数はゼロであり、画像は許容可能であるとみなされる。r=10%である場合、画像は飽和濃度が高いとみなされ、シグモイド関数の結果は1であり、画像は神経網によって無用であると分類される。
【0199】
ピーク妨害およびノイズピーク
この発明の一実施例によれば、分類および信頼値は、例2のステップ1および4を含むアルゴリズムで計算された特性パラメータSIPNによって求めることができる。
【0200】
別の実施例によれば、分類および信頼値は、以下に説明するアルゴリズムに従って計算される所望のパラメータによって求めることができる。画像がピーク妨害によってどの程度含まれているかを判断するには、決定的な要因が多数ある。なかでも最も重要なのは、ピークのサイズ、画像の場所、およびピークの総量である。このアルゴリズムはしたがって、これらの異なる局面を1つに圧縮すること、または各パラメータを別個のものとして扱うことが可能である。しかしながら、すべての局面を1つの単一アルゴリズムに組合せる際、満足のいく結果を得るためには問題がしばしば存在する。以下の例では、各ピークのサイズおよびピークの個数は、場所パラメータとは別個に取扱われる。
【0201】
以下の設計されたアルゴリズムは、最大ピークの量を計算し、それを信号のサイズ、つまり総量に関連付ける。
【0202】
このアルゴリズムの詳細を以下に説明する。
1.ピークの場所は予め、既存のピーク検出アルゴリズムによって特定される。上述の例2を参照されたい。検出されたすべてのピークのうち、検出区域内、たとえば粒子床などの固相内、または、固相/検出区域ボーダーから規定された距離の範囲内にあるピークのみが考慮される。この距離は、画素の個数、好ましくは10画素以下で規定されてもよい。
2.最大強度値を有する画素の周囲の予め定められた区域からのピーク強度値を大きい順に並べ替え、検出された各ピークについて並べ替え手順を繰返す。
3.しきい値レベルが最高ピークの一番上に置かれ、(2)のリストからの次の画素へ下げられる。
4.画像はこのレベルでしきい値設定され、ラベル付けされたバイナリ画像が取得される。ピーク画素を包囲する区域がベクトルで格納される。
5.ピーク画素を包囲する区域において有意な増加があるまでステップ(2)〜(4)が繰返される。前のしきい値レベルが選択され、ピークの量が計算される。
6.最終的なパラメータ値PPD1として、(1)からの検出区域全体における強度量(検出区域内の全画素の合計)によって除算されたピーク量が使用される。
【0203】
効率をさらに高め、ラベル付け(時間のかかる作業であることがわかっている)の使用を最小限に抑えるため、ピーク画素の周囲の区域に有意な増加がない限り、下方へのステップサイズ(ステップ3参照)は2倍にされる。
【0204】
別個のパラメータ値PPD2として、粒子床の前端からの最大ピークの街区距離が計算される。
【0205】
洗浄不良
検出区域に関連する固相、たとえば多孔床の洗浄プロセス中、洗浄液は、固相における不特定の結合剤をすべてうまく除去しないかもしれない。最高画素強度は、完全な条件に関しては、流れが固相に入る場所である固相の始めに集中するが、それに代わり、固相の終わりに集中する。上記画像は「洗浄不良」画像を呼ばれる。そのような画像での信号強度量は、大きな後方へのチルトによって特徴付けられ、「洗浄不良」画像は、多数の異なる強度しきい値レベルの各々について、バイナリ画像(各画素は、信号強度量外にある場合にはゼロであり、上記量内に位置する場合には1である)を作り出すことによって識別可能である。単一のパラメータにおけるチルトを捕捉するために、各バイナリ画像につい
ての質量中心が計算される。以下に好適なアルゴリズムの一例を示す。
【0206】
1.適切なしきい値を得るために、統合区域410における信号強度量の下位四分位点、中間および上位四分位点の強度値が評価される。
2.選択されたしきい値強度値の各々について、信号強度量のバイナリ画像が作成される。
3.バイナリ画像の各々について質量中心座標が計算される。3つのバイナリ画像は、統合区域のゼロ強度レベルを超える、異なる強度レベルに位置する。
4.最小二乗方程式により、直線を、バイナリ画像の3つの質量中心座標を通るよう適合させる。流れ方向における直線のチルト係数は、所望の特性パラメータPPWとして使用される。
【0207】
捕捉反応物質、たとえば抗体の不良
検出区域と関連した固相に固定された捕捉反応物質がその対応物を十分速く捕捉しない場合、捕捉された対応物は検出区域/固相中に均一に分布され、検出区域/固相の始まりだけにある理想的な場合のようにはならない。生データはあまり信頼できなくなり、低い信頼度をもたらしてしまう。捕捉反応物質、たとえば抗体の不良を被る画像は、検出区域/固相、たとえば粒子床の全体にわたって非常に均一に分布された信号を有し、このため大きな量を所有する。所望されるパラメータは、統合区域410における全画素の強度値を積分、またはむしろ加算することにより、かつ、得られた値を統合区域のサイズで除算することにより、計算される。
【0208】
【数3】
【0209】
ランダムノイズ
この発明の一実施例によれば、分類および信頼値は、例3のステップ1および4を含むアルゴリズムで計算されたパラメータIBNによって求めることができる。
【0210】
別の実施例によれば、分類および信頼値は、以下に説明するアルゴリズムに従って計算される所望のパラメータによって求めることができる。低品質の画像はしばしば、信号の欠落を被り、大量のノイズが画像全体にわたって均一に広がる。一般に、粒子床外の分散が増加するにつれて、品質は悪くなる。チルトパラメータの計算と同様のアプローチがここで提案される。
【0211】
1.生画像全体がその上位四分位点でしきい値設定され、この強度レベルでのバイナリ画像が作成される。
2.バイナリ画像の周囲が計算され、外縁が省略される。
3.最後に、周囲を画像サイズで除算することによって、所望の特性パラメータPRNが得られる。
【0212】
バイナリ画像の周囲を計算する際、いわゆるショットノイズがランダムノイズ画像を特徴付ける。1つの画素自体は4つのエッジをもたらし、一方、大きなバイナリオブジェクトは、多くの画素をエッジなしで内部に所有する。ショットノイズ画像はパラメータについての大きな値につながり、独特の信号を有する画像は、小さな周囲を作り出す1つのカウンタのみを有する。
【0213】
滑らかな信号
信号の形状は、いくつかのパラメータで捕捉することがより難しい重要な特徴である。「良好な形状の」信号を有利に扱うことは望ましい。信号量の形状を判断する際、最も重要な特性は、信号量の滑らかさである。目視分析は、良好な形状の信号については、その形状がほぼ正方形であることを示唆する。角度方向に沿った信号プロファイルは、多数の画素から統合区域に信号の最大値を選び、プロファイルをベクトルで格納することによって得られる。角度方向に沿った信号プロファイルを使用し、近似二次多項式曲線からのずれを計算することは、信号がどれくらい滑らかかを示す。ずれの平均は、特性パラメータPSSとして使用される。
【0214】
【数4】
y=近似二次多項式。
p=前からの信号プロファイル。
【0215】
流れ抑制
マイクロ流体装置、たとえばCDの生産中に起こり得る一問題は、粒子床の形であり得る固相などを含む反応マイクロキャビティに至るチャネルが、埃、粒子またはファイバなどで詰まってしまうことである。結果として得られる画像は、内側半径方向へ向かう隆起を有する、非常に特徴的な外見を有する。設計されたアルゴリズムは、画像内の小さい、予め規定された区域を利用する。
【0216】
区域Cは、統合区域のボーダー間に中心があり、その側の1つが入口側で画像ボーダーと一致している、5×5画素区域である。区域Lは、入口側の画像区域の左隅における5×5の画素区域である。区域Rは、入口側の右隅における5×5の画素区域である。
【0217】
【数5】
【0218】
測定される信号に干渉する材料で作られたマイクロ流体装置
時として、検出区域に関連する反応/検出マイクロキャビティ外の領域が、所望の信号から分離するのが困難な信号を促す場合がある。たとえばCDタイプのマイクロ流体装置におけるプラスチック材料は、所望の信号が蛍光である場合に問題を起こす恐れがある広い帯域の蛍光を生じさせる場合がある。このパラメータについて選択されたアプローチは、再度、しきい値方法である。蛍光といったこの種の望ましくない信号に影響される画像の優勢な区域は、(流れ方向における)底端および側端に向かって集中しているため、この区域は以下に説明する手順によって分離される。
【0219】
1.所望の信号区域、たとえば蛍光区域が、統合区域の上位四分位点でしきい値アプローチによって規定および分離され、バイナリ画像をもたらす。
2.ステップ(1)で得られたバイナリ画像が、画素に関して、元画像(生強度画像)を用いてその上位四分位点で乗算され、「信号量画像」をもたらす。
3.ステップ(2)により提供される画像の信号強度の量を計算することによって、特性パラメータPMDが得られる。
【0220】
上述のアルゴリズムは、信頼値を求めるための発明された方法において使用されるパラメータを生成する。
【0221】
マイクロ流体装置のマイクロチャネル構造における分析プロセスから信頼値を求めるための発明された方法の異なる実施例は、スタンドアロンシステム(図1の参照番号100)において実現されてもよく、上記方法は、
分析プロセスを実行するステップと、
信号データのためのマイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって、分析プロセスのデータ情報を取得するステップとを含み、上記サーチ区域は分析プロセスの結果を含んでおり、上記方法はさらに、
上記取得されたデータ情報を、格納された画像として、スキャンされた各サーチ区域につき1画像ずつ格納するステップとを含み、
上記方法は、
信頼値を求めるために、取得されたデータ情報をデータ処理するステップと、
所望すれば、信頼値をディスプレイ装置上に提示するステップとをさらに含むことを特徴とする。
【0222】
発明された方法は、スタンドアロンシステムの制御ユニット(図1の110)に格納され、それによって実行されてもよい。
【0223】
発明された方法はまた、マイクロ流体機器、システムまたは装置に関連付けられていない、もしくは接続されていない、別個のコンピュータ手段/処理ユニット上で実行されてもよい。コンピュータ手段または処理ユニットは、特化コンピュータ、サーバ、パーソナルコンピュータ、デジタルプロセッサ、中央処理ユニットなどであってもよい。
【0224】
この発明のある革新的な局面は、添付の特許請求の範囲において、より詳細に規定される。この発明およびその利点が詳細に説明されたが、添付の特許請求の範囲によって定義されるようなこの発明の精神および範囲から逸脱することなく、さまざまな変更、代替および置換がここになされ得ることが理解されるはずである。さらに、この出願の範囲は、明細書に記載されたプロセス、機械、製造、物質の組成、手段、方法およびステップの特定の実施例に限定されるよう意図されてはいない。当業者であればこの発明の開示から容易に理解するように、ここに記載した対応する実施例と実質的に同じ機能を実行し、または実質的に同じ結果を達成する、現在既存の、または後々開発されるプロセス、機械、製造、物質の組成、手段、方法、またはステップが、この発明に従って利用されてもよい。したがって、添付の特許請求の範囲は、そのようなプロセス、機械、製造、物質の組成、手段、方法、またはステップをその範囲内に含むよう意図されている。
【図面の簡単な説明】
【0225】
【図1】マイクロ流体装置のためのシステムを概略的に示すブロック図である。
【図2】マイクロ流体装置の一実施例を示す図である。
【図3A】サーチ区域の概略的な図である。
【図3B】サーチ区域の概略的な図である。
【図4】粒子床のサーチ区域に対応する画像における信号分布の例を示す図である。
【図5】粒子床のサーチ区域に対応する画像における信号分布の例を示す図である。
【図6】粒子床のサーチ区域に対応する画像における信号分布の例を示す図である。
【図7】粒子床のサーチ区域に対応する画像における信号分布の例を示す図である。
【図8】粒子床のサーチ区域に対応する画像における信号分布の例を示す図である。
【図9】粒子床のサーチ区域に対応する画像における信号分布の例を示す図である。
【図10】粒子床のサーチ区域に対応する画像における信号分布の例を示す図である。
【図11】サーチ区域における信号分布の例を平面図で示す図である。
【図12】サーチ区域における信号分布の例を平面図で示す図である。
【図13】サーチ区域における信号分布の例を平面図で示す図である。
【図14】サーチ区域における信号分布の例を平面図で示す図である。
【図15】サーチ区域における信号分布の例を平面図で示す図である。
【特許請求の範囲】
【請求項1】
マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値Cを求めるための方法であって、そこから前記分析プロセスのデータ情報が、信号データのための前記マイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、前記サーチ区域は前記分析プロセスの結果を含み、前記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、
前記方法は、前記信頼値(C)を求めるために、前記取得されたデータ情報をデータ処理するステップを含むことを特徴とする、方法。
【請求項2】
前記データ処理するステップは、前記格納された画像全体または前記格納された画像の一部の前記データ情報を使用して信頼値を求めるステップを伴うことを特徴とする、請求項1に記載の方法。
【請求項3】
前記データ処理するステップは、画像における前記信号データの分布によって前記信頼値を求めるステップを伴うことを特徴とする、請求項1または2のいずれかに記載の方法。
【請求項4】
前記データ処理するステップは、前記信頼値を提示するステップを伴うことを特徴とする、請求項1、2または3のいずれかに記載の方法。
【請求項5】
前記信頼値に基づいて、前記結果が許容可能か許容不能かを提示するステップをさらに伴うことを特徴とする、請求項4に記載の方法。
【請求項6】
前記データ処理するステップは、検出された問題または画像のある欠陥に関連する信頼値を、画像の前記データ情報を用いて求めるステップをさらに伴うことを特徴とする、請求項1〜3のいずれかに記載の方法。
【請求項7】
前記少なくとも1つのサーチ区域は、前記データ情報を取得した源である反応マイクロチャンバを含むことを特徴とする、請求項6に記載の方法。
【請求項8】
前記反応マイクロチャンバは、前記データ情報を取得した源である固相を含み、前記固相は、たとえば、
a) 前記反応チャンバの壁の一部、または、
b) 多孔質床、たとえば多孔質モノリシックプラグ、または多孔質粒子もしくは非多孔質粒子の充填床、または、
c)懸濁粒子、
であること、および、
前記データ処理するステップは、
・乾燥した床、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・ノイズピーク、
・床の孔、
・電子的に飽和した信号、
・洗浄不良、
・抗体の捕捉不良、
・化学的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するステップをさらに伴うことを特徴とする、請求項7に記載の方法。
【請求項9】
前記反応マイクロチャンバは、前記データ情報を取得した源である、通常均質な溶液を含み、前記データ処理するステップは、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・不均一な信号分布、
・電子的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するステップをさらに伴うことを特徴とする、請求項7に記載の方法。
【請求項10】
前記データ処理するステップは、画像方向の1つにおいて前記信号データを集約した結果であるグラフから、サーチ区域についての前記信頼値を求めるステップを伴うことを特徴とする、請求項5に記載の方法。
【請求項11】
前記データ処理するステップはニューラルネットワークの使用により行なわれ、それにより、前記画像データ情報は前記ニューラルネットワークへの入力データであることを特徴とする、請求項1〜10のいずれかに記載の方法。
【請求項12】
マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値を求めるためのシステムであって、そこから前記分析プロセスのデータ情報が、信号データのための前記マイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、前記サーチ区域は前記分析プロセスの結果を含み、前記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、
前記システムは、前記信頼値を求めるために、前記取得されたデータ情報をデータ処理するための手段をさらに含むことを特徴とする、システム。
【請求項13】
データ処理するための前記手段は、前記格納された画像全体または前記格納された画像の一部の前記データ情報を使用して前記信頼値を求めるための手段をさらに含むことを特徴とする、請求項12に記載のシステム。
【請求項14】
データ処理するための前記手段は、画像における前記信号データの分布によって前記信頼値を求めるための手段をさらに含むことを特徴とする、請求項12または13のいずれかに記載のシステム。
【請求項15】
システムは、前記信頼値を提示するための手段をさらに含むことを特徴とする、請求項12、13または14のいずれかに記載のシステム。
【請求項16】
前記システムは、前記信頼値に基づいて、前記結果が許容可能か許容不能かを提示するための手段を含むことを特徴とする、請求項15に記載のシステム。
【請求項17】
データ処理するための前記手段は、検出された問題または画像のある欠陥に関連する信頼値を、画像の前記データ情報を用いて設定するための手段をさらに含むことを特徴とする、請求項12〜14のいずれかに記載のシステム。
【請求項18】
前記少なくとも1つのサーチ区域は、前記データ情報を取得した源である反応マイクロチャンバを含むことを特徴とする、請求項17に記載のシステム。
【請求項19】
前記反応マイクロチャンバは、前記データ情報を取得した源である固相を含み、前記固相は、
a) 前記反応チャンバの壁の一部、または、
b) 多孔質床、たとえば多孔質モノリシックプラグ、または多孔質粒子もしくは非多孔質粒子の充填床、または、
c)懸濁粒子、
であること、および、
データ処理するための前記手段は、
・乾燥した床、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・ノイズピーク、
・床の孔、
・電子的に飽和した信号、
・洗浄不良、
・抗体の捕捉不良、
・化学的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するための手段をさらに含むことを特徴とする、請求項18に記載のシステム。
【請求項20】
前記反応マイクロチャンバは、前記データ情報を取得した源である、通常均質な溶液を含み、データ処理するための前記手段は、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・不均一な信号分布、
・電子的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するための手段をさらに含むことを特徴とする、請求項18に記載のシステム。
【請求項21】
データ処理するための前記手段は、画像方向の1つにおいて信号データを集約した結果であるグラフから、サーチ区域についての前記信頼値を求めるための手段をさらに含むことを特徴とする、請求項16に記載のシステム。
【請求項22】
前記システムはニューラルネットワークであり、それにより、前記画像データ情報は前記ニューラルネットワークへの入力データであることを特徴とする、請求項12〜21のいずれかに記載のシステム。
【請求項23】
マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値を求めるためのコンピュータプログラム製品であって、そこから前記分析プロセスのデータ情報が、信号データのための前記マイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、前記サーチ区域は前記分析プロセスの結果を含み、前記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、
前記コンピュータプログラム製品は、コンピュータ読取可能および実行可能プログラムコード手段が内部に設けられたコンピュータ読取可能記憶媒体を含み、コンピュータ読取可能プログラムコード手段は、前記信頼値を求めるために、画像において前記取得されたデータ情報をデータ処理するためのコンピュータ読取可能プログラムコード手段を含むこ
とを特徴とする、コンピュータプログラム製品。
【請求項24】
データ処理するための前記コンピュータ読取可能プログラムコード手段は、前記格納された画像全体または前記格納された画像の一部の前記データ情報を使用して前記信頼値を求めるためのコンピュータ読取可能プログラムコード手段を含むことを特徴とする、請求項23に記載のコンピュータプログラム製品。
【請求項25】
データ処理するための前記コンピュータ読取可能プログラムコード手段は、画像における前記信号データの分布によって前記信頼値を求めるためのコンピュータ読取可能プログラムコード手段をさらに含むことを特徴とする、請求項23または24のいずれかに記載のコンピュータプログラム製品。
【請求項26】
前記コンピュータ読取可能プログラムコード手段は、前記信頼値を提示するためのコンピュータ読取可能プログラムコード手段を含むことを特徴とする、請求項23、24または25のいずれかに記載のコンピュータプログラム製品。
【請求項27】
前記コンピュータ読取可能プログラムコード手段は、前記信頼値に基づいて、前記結果が許容可能か許容不能かを提示するためのコンピュータ読取可能プログラムコード手段を含むことを特徴とする、請求項26に記載のコンピュータプログラム製品。
【請求項28】
データ処理するための前記コンピュータ読取可能プログラムコード手段は、検出された問題または画像のある欠陥に関連する信頼値を、画像の前記データ情報を用いて設定するためのコンピュータ読取可能プログラムコード手段をさらに含むことを特徴とする、請求項23〜25のいずれかに記載のコンピュータプログラム製品。
【請求項29】
前記少なくとも1つのサーチ区域は、前記データ情報を取得した源である反応マイクロチャンバを含むことを特徴とする、請求項28に記載のコンピュータプログラム製品。
【請求項30】
前記反応マイクロチャンバは、前記データ情報を取得した源である固相を含み、前記固相は、
a) 前記反応チャンバの壁の一部、または、
b) 多孔質床、たとえば多孔質モノリシックプラグ、または多孔質粒子もしくは非多孔質粒子の充填床、または、
c)懸濁粒子、
であること、および、
データ処理するための前記コンピュータ読取可能プログラムコード手段は、
・乾燥した床、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・ノイズピーク、
・床の孔、
・電子的に飽和した信号、
・洗浄不良、
・抗体の捕捉不良、
・化学的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するためのコンピュータ読取可能プログラムコード手段をさらに含むことを特徴とする、請求項29に記載のコンピュータプログラム製品。
【請求項31】
前記反応マイクロチャンバは、前記データ情報を取得した源である、通常均質な溶液を含み、データ処理するための前記コンピュータ読取可能プログラムコード手段は、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・不均一な信号分布、
・電子的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するためのコンピュータ読取可能プログラムコード手段をさらに含むことを特徴とする、請求項29に記載のコンピュータプログラム製品。
【請求項32】
データ処理するための前記コンピュータ読取可能プログラムコード手段は、画像方向の1つにおいて前記信号データを集約した結果であるグラフから、サーチ区域についての前記信頼値を求めるためのコンピュータ読取可能プログラムコード手段を含むことを特徴とする、請求項27に記載のコンピュータプログラム製品。
【請求項33】
前記コンピュータ読取可能プログラムコード手段はニューラルネットワークで実行され、それにより、前記画像データ情報は前記ニューラルネットワークへの入力データであることを特徴とする、請求項22に記載のコンピュータプログラム製品。
【請求項34】
マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値を求めるためのニューラルネットワークであって、そこから前記分析プロセスのデータ情報が、信号データのための前記マイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、前記サーチ区域は前記分析プロセスの結果を含み、前記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、
前記ニューラルネットワークは、請求項1〜10に記載の方法ステップの各々を行なうための手段をさらに含むことを特徴とする、ニューラルネットワーク。
【請求項35】
前記ニューラルネットワークは、予め訓練された多層認識ニューラルネットワークであることを特徴とする、請求項34に記載のニューラルネットワーク。
【請求項1】
マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値Cを求めるための方法であって、そこから前記分析プロセスのデータ情報が、信号データのための前記マイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、前記サーチ区域は前記分析プロセスの結果を含み、前記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、
前記方法は、前記信頼値(C)を求めるために、前記取得されたデータ情報をデータ処理するステップを含むことを特徴とする、方法。
【請求項2】
前記データ処理するステップは、前記格納された画像全体または前記格納された画像の一部の前記データ情報を使用して信頼値を求めるステップを伴うことを特徴とする、請求項1に記載の方法。
【請求項3】
前記データ処理するステップは、画像における前記信号データの分布によって前記信頼値を求めるステップを伴うことを特徴とする、請求項1または2のいずれかに記載の方法。
【請求項4】
前記データ処理するステップは、前記信頼値を提示するステップを伴うことを特徴とする、請求項1、2または3のいずれかに記載の方法。
【請求項5】
前記信頼値に基づいて、前記結果が許容可能か許容不能かを提示するステップをさらに伴うことを特徴とする、請求項4に記載の方法。
【請求項6】
前記データ処理するステップは、検出された問題または画像のある欠陥に関連する信頼値を、画像の前記データ情報を用いて求めるステップをさらに伴うことを特徴とする、請求項1〜3のいずれかに記載の方法。
【請求項7】
前記少なくとも1つのサーチ区域は、前記データ情報を取得した源である反応マイクロチャンバを含むことを特徴とする、請求項6に記載の方法。
【請求項8】
前記反応マイクロチャンバは、前記データ情報を取得した源である固相を含み、前記固相は、たとえば、
a) 前記反応チャンバの壁の一部、または、
b) 多孔質床、たとえば多孔質モノリシックプラグ、または多孔質粒子もしくは非多孔質粒子の充填床、または、
c)懸濁粒子、
であること、および、
前記データ処理するステップは、
・乾燥した床、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・ノイズピーク、
・床の孔、
・電子的に飽和した信号、
・洗浄不良、
・抗体の捕捉不良、
・化学的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するステップをさらに伴うことを特徴とする、請求項7に記載の方法。
【請求項9】
前記反応マイクロチャンバは、前記データ情報を取得した源である、通常均質な溶液を含み、前記データ処理するステップは、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・不均一な信号分布、
・電子的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するステップをさらに伴うことを特徴とする、請求項7に記載の方法。
【請求項10】
前記データ処理するステップは、画像方向の1つにおいて前記信号データを集約した結果であるグラフから、サーチ区域についての前記信頼値を求めるステップを伴うことを特徴とする、請求項5に記載の方法。
【請求項11】
前記データ処理するステップはニューラルネットワークの使用により行なわれ、それにより、前記画像データ情報は前記ニューラルネットワークへの入力データであることを特徴とする、請求項1〜10のいずれかに記載の方法。
【請求項12】
マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値を求めるためのシステムであって、そこから前記分析プロセスのデータ情報が、信号データのための前記マイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、前記サーチ区域は前記分析プロセスの結果を含み、前記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、
前記システムは、前記信頼値を求めるために、前記取得されたデータ情報をデータ処理するための手段をさらに含むことを特徴とする、システム。
【請求項13】
データ処理するための前記手段は、前記格納された画像全体または前記格納された画像の一部の前記データ情報を使用して前記信頼値を求めるための手段をさらに含むことを特徴とする、請求項12に記載のシステム。
【請求項14】
データ処理するための前記手段は、画像における前記信号データの分布によって前記信頼値を求めるための手段をさらに含むことを特徴とする、請求項12または13のいずれかに記載のシステム。
【請求項15】
システムは、前記信頼値を提示するための手段をさらに含むことを特徴とする、請求項12、13または14のいずれかに記載のシステム。
【請求項16】
前記システムは、前記信頼値に基づいて、前記結果が許容可能か許容不能かを提示するための手段を含むことを特徴とする、請求項15に記載のシステム。
【請求項17】
データ処理するための前記手段は、検出された問題または画像のある欠陥に関連する信頼値を、画像の前記データ情報を用いて設定するための手段をさらに含むことを特徴とする、請求項12〜14のいずれかに記載のシステム。
【請求項18】
前記少なくとも1つのサーチ区域は、前記データ情報を取得した源である反応マイクロチャンバを含むことを特徴とする、請求項17に記載のシステム。
【請求項19】
前記反応マイクロチャンバは、前記データ情報を取得した源である固相を含み、前記固相は、
a) 前記反応チャンバの壁の一部、または、
b) 多孔質床、たとえば多孔質モノリシックプラグ、または多孔質粒子もしくは非多孔質粒子の充填床、または、
c)懸濁粒子、
であること、および、
データ処理するための前記手段は、
・乾燥した床、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・ノイズピーク、
・床の孔、
・電子的に飽和した信号、
・洗浄不良、
・抗体の捕捉不良、
・化学的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するための手段をさらに含むことを特徴とする、請求項18に記載のシステム。
【請求項20】
前記反応マイクロチャンバは、前記データ情報を取得した源である、通常均質な溶液を含み、データ処理するための前記手段は、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・不均一な信号分布、
・電子的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するための手段をさらに含むことを特徴とする、請求項18に記載のシステム。
【請求項21】
データ処理するための前記手段は、画像方向の1つにおいて信号データを集約した結果であるグラフから、サーチ区域についての前記信頼値を求めるための手段をさらに含むことを特徴とする、請求項16に記載のシステム。
【請求項22】
前記システムはニューラルネットワークであり、それにより、前記画像データ情報は前記ニューラルネットワークへの入力データであることを特徴とする、請求項12〜21のいずれかに記載のシステム。
【請求項23】
マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値を求めるためのコンピュータプログラム製品であって、そこから前記分析プロセスのデータ情報が、信号データのための前記マイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、前記サーチ区域は前記分析プロセスの結果を含み、前記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、
前記コンピュータプログラム製品は、コンピュータ読取可能および実行可能プログラムコード手段が内部に設けられたコンピュータ読取可能記憶媒体を含み、コンピュータ読取可能プログラムコード手段は、前記信頼値を求めるために、画像において前記取得されたデータ情報をデータ処理するためのコンピュータ読取可能プログラムコード手段を含むこ
とを特徴とする、コンピュータプログラム製品。
【請求項24】
データ処理するための前記コンピュータ読取可能プログラムコード手段は、前記格納された画像全体または前記格納された画像の一部の前記データ情報を使用して前記信頼値を求めるためのコンピュータ読取可能プログラムコード手段を含むことを特徴とする、請求項23に記載のコンピュータプログラム製品。
【請求項25】
データ処理するための前記コンピュータ読取可能プログラムコード手段は、画像における前記信号データの分布によって前記信頼値を求めるためのコンピュータ読取可能プログラムコード手段をさらに含むことを特徴とする、請求項23または24のいずれかに記載のコンピュータプログラム製品。
【請求項26】
前記コンピュータ読取可能プログラムコード手段は、前記信頼値を提示するためのコンピュータ読取可能プログラムコード手段を含むことを特徴とする、請求項23、24または25のいずれかに記載のコンピュータプログラム製品。
【請求項27】
前記コンピュータ読取可能プログラムコード手段は、前記信頼値に基づいて、前記結果が許容可能か許容不能かを提示するためのコンピュータ読取可能プログラムコード手段を含むことを特徴とする、請求項26に記載のコンピュータプログラム製品。
【請求項28】
データ処理するための前記コンピュータ読取可能プログラムコード手段は、検出された問題または画像のある欠陥に関連する信頼値を、画像の前記データ情報を用いて設定するためのコンピュータ読取可能プログラムコード手段をさらに含むことを特徴とする、請求項23〜25のいずれかに記載のコンピュータプログラム製品。
【請求項29】
前記少なくとも1つのサーチ区域は、前記データ情報を取得した源である反応マイクロチャンバを含むことを特徴とする、請求項28に記載のコンピュータプログラム製品。
【請求項30】
前記反応マイクロチャンバは、前記データ情報を取得した源である固相を含み、前記固相は、
a) 前記反応チャンバの壁の一部、または、
b) 多孔質床、たとえば多孔質モノリシックプラグ、または多孔質粒子もしくは非多孔質粒子の充填床、または、
c)懸濁粒子、
であること、および、
データ処理するための前記コンピュータ読取可能プログラムコード手段は、
・乾燥した床、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・ノイズピーク、
・床の孔、
・電子的に飽和した信号、
・洗浄不良、
・抗体の捕捉不良、
・化学的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するためのコンピュータ読取可能プログラムコード手段をさらに含むことを特徴とする、請求項29に記載のコンピュータプログラム製品。
【請求項31】
前記反応マイクロチャンバは、前記データ情報を取得した源である、通常均質な溶液を含み、データ処理するための前記コンピュータ読取可能プログラムコード手段は、
・角度方向におけるサーチ区域の較正不良、
・半径方向におけるサーチ区域の較正不良、
・不均一な信号分布、
・電子的に飽和した信号、
・ランダムノイズ、
という問題のいずれかまたはそれらの組合せが検出された妨害の検出量に関連して、信頼値を設定するためのコンピュータ読取可能プログラムコード手段をさらに含むことを特徴とする、請求項29に記載のコンピュータプログラム製品。
【請求項32】
データ処理するための前記コンピュータ読取可能プログラムコード手段は、画像方向の1つにおいて前記信号データを集約した結果であるグラフから、サーチ区域についての前記信頼値を求めるためのコンピュータ読取可能プログラムコード手段を含むことを特徴とする、請求項27に記載のコンピュータプログラム製品。
【請求項33】
前記コンピュータ読取可能プログラムコード手段はニューラルネットワークで実行され、それにより、前記画像データ情報は前記ニューラルネットワークへの入力データであることを特徴とする、請求項22に記載のコンピュータプログラム製品。
【請求項34】
マイクロ流体装置のマイクロチャネル構造において行なわれる分析プロセスから少なくとも1つの信頼値を求めるためのニューラルネットワークであって、そこから前記分析プロセスのデータ情報が、信号データのための前記マイクロチャネル構造の少なくとも1つのサーチ区域をスキャンすることによって取得され、前記サーチ区域は前記分析プロセスの結果を含み、前記取得されたデータ情報は、画像として、スキャンされた各サーチ区域につき1画像ずつ格納され、
前記ニューラルネットワークは、請求項1〜10に記載の方法ステップの各々を行なうための手段をさらに含むことを特徴とする、ニューラルネットワーク。
【請求項35】
前記ニューラルネットワークは、予め訓練された多層認識ニューラルネットワークであることを特徴とする、請求項34に記載のニューラルネットワーク。
【図1】

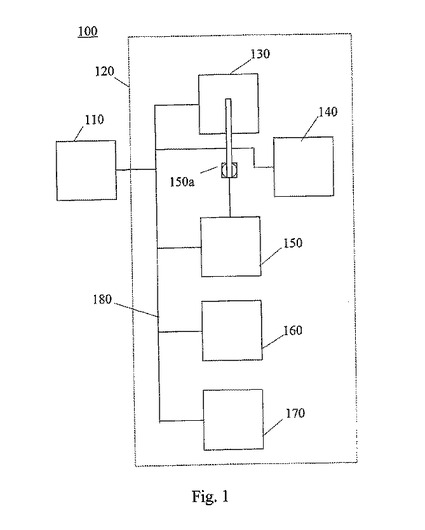
【図2】
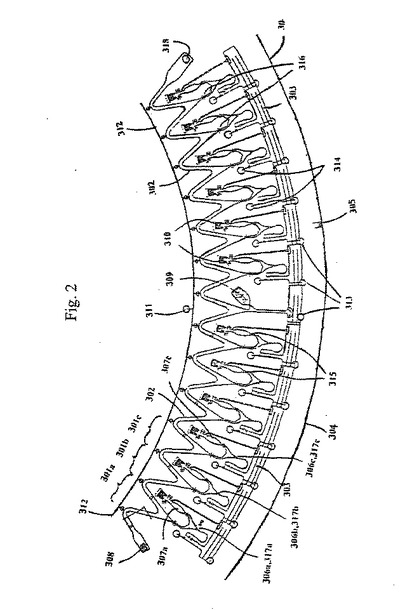
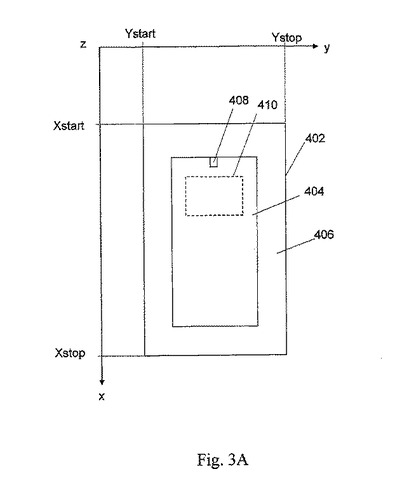
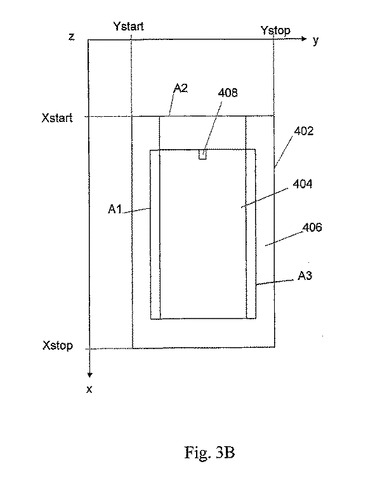
【図4】
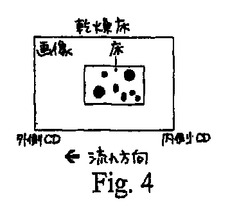
【図5】
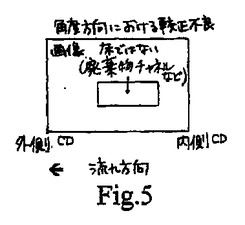
【図6】
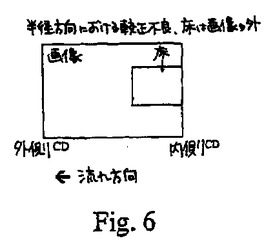
【図7】
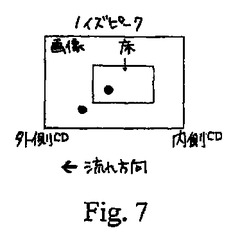
【図8】
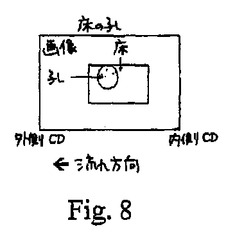
【図9】
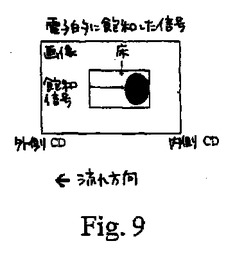
【図10】
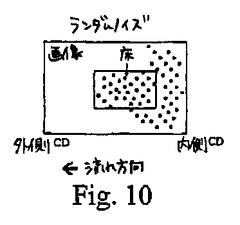
【図11】
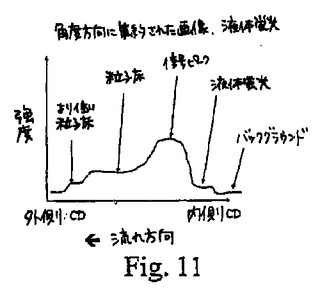
【図12】
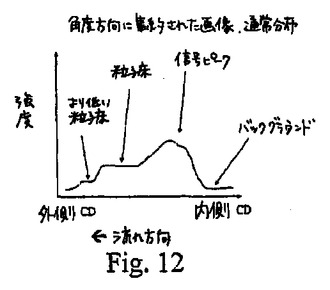
【図13】
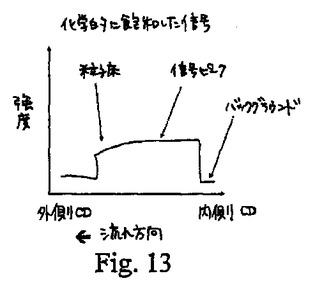
【図14】
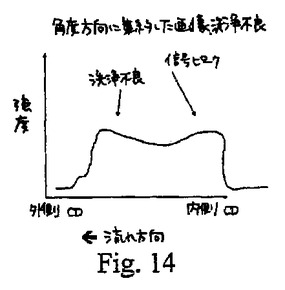
【図15】
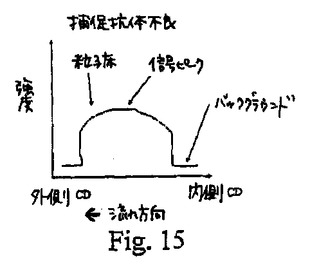
【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公表番号】特表2007−527514(P2007−527514A)
【公表日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願番号】特願2006−518588(P2006−518588)
【出願日】平成16年6月30日(2004.6.30)
【国際出願番号】PCT/SE2004/001066
【国際公開番号】WO2005/001766
【国際公開日】平成17年1月6日(2005.1.6)
【出願人】(504103294)ユロス・アクチボラゲット (1)
【氏名又は名称原語表記】GYROS AB
【Fターム(参考)】
【公表日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願日】平成16年6月30日(2004.6.30)
【国際出願番号】PCT/SE2004/001066
【国際公開番号】WO2005/001766
【国際公開日】平成17年1月6日(2005.1.6)
【出願人】(504103294)ユロス・アクチボラゲット (1)
【氏名又は名称原語表記】GYROS AB
【Fターム(参考)】
[ Back to top ]