
信頼度算出装置
【課題】所定領域に判定対象として予め定めた物体が存在するか否かを正確に判定する。
【解決手段】障害物認識装置では、障害物探索手段24は、受信信号取得手段32により取得された所定領域からの信号に基づいて、所定領域内に存在すると予想される歩行者からの反射信号を検出し、特徴量抽出手段36は、反射信号の強度を抽出し、存在確率算出手段40は、予め求めた物体からの反射信号の特徴量モデルと上記抽出された特徴量とに基づいて、物体の存在確率を算出し、不存在確率算出手段44は、ノイズ信号の特徴量モデルと上記抽出された特徴量とに基づいて物体の不存在確率を算出する。信頼度算出手段46は、算出された物体の存在確率と物体の不存在確率とに基づいて、検出された反射信号の信頼度を算出する。
【解決手段】障害物認識装置では、障害物探索手段24は、受信信号取得手段32により取得された所定領域からの信号に基づいて、所定領域内に存在すると予想される歩行者からの反射信号を検出し、特徴量抽出手段36は、反射信号の強度を抽出し、存在確率算出手段40は、予め求めた物体からの反射信号の特徴量モデルと上記抽出された特徴量とに基づいて、物体の存在確率を算出し、不存在確率算出手段44は、ノイズ信号の特徴量モデルと上記抽出された特徴量とに基づいて物体の不存在確率を算出する。信頼度算出手段46は、算出された物体の存在確率と物体の不存在確率とに基づいて、検出された反射信号の信頼度を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、信頼度算出装置にかかり、より詳細には、所定領域内に存在する物体からの反射信号がどれだけ信頼できるのかを示す信頼度を算出する信頼度算出装置に関する。
【背景技術】
【0002】
従来、レーダ装置等を用いて所定領域内に障害物(例えば、歩行者)が存在するか否かを検出する検出性能の向上を目的として、検出の信頼性を評価する障害物認識装置が種々提案されている。
【0003】
例えば、多数決判定(N中M検出処理)により目標の有無を判定する技術(特許文献1)、検出回数に基づいて信頼度を判定する技術(特許文献2)、受信電力や到来方位の差、観測と予測の位置誤差、及び観測回数等によって検出結果の信頼性を評価する技術(特許文献3)、距離と角度で決まる検出領域に応じて受信強度の閾値を設定して車両か非車両かを判定する技術(特許文献4)などである。
【特許文献1】特開2001−194452号公報
【特許文献2】特開2004−117071号公報
【特許文献3】特開2004−017763号公報
【特許文献4】特開2002−040139号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、ミリ波レーダで歩行者を観測した場合、歩行者から反射して受信した信号には、 車両から反射して受信した信号に比べて反射強度が非常に低く(SN比が小さい)、歩行者の様々な姿勢変化などに伴って反射強度が時々刻々と変化するという特徴があり、上記の従来技術ではその存在を正確に判定することが困難である。
【0005】
なお、反射強度のSN比が上記のように小さいだけでなく、SN比自体の変動幅も大きいため、特許文献4の従来技術のように固定した閾値を設定することは容易ではない。さらに、同様の理由から、特許文献3のように受信電力の差によって信頼性を評価することも難しい。更に、観測回数を増やして信頼性を判定する特許文献1及び特許文献2の従来技術は、閾値設定の困難さのほかに検出時間の遅れが発生する点も問題となり、衝突回避等のアプリケーションへの利用には不向きである。
【0006】
本発明は、上記事実に鑑み成されたもので、所定領域に判定対象として予め定めた物体が存在するか否かを正確かつ迅速に判定することに寄与可能な信頼度算出装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために請求項1に記載の発明の信頼度算出装置は、所定領域に信号を送信する送信手段と、前記所定領域からの信号を受信する受信手段と、前記受信された信号に基づいて、前記所定領域内に存在すると予想される判定対象として予め定めた物体からの反射信号を検出する検出手段と、前記反射信号の特徴量を抽出する抽出手段と、所定領域内の複数の位置に物体を配置して各位置の物体からの反射信号の特徴量を予め求め、該予め求めた各位置の物体からの反射信号の特徴量と前記抽出された特徴量とに基づいて、前記所定領域内の物体の存在確率を算出する存在確率算出手段と、所定領域内の複数の位置からのノイズ信号の特徴量を予め求め、該予め求めたノイズ信号の特徴量と前記抽出された特徴量とに基づいて前記所定領域内の物体の不存在確率を算出する不存在確率算出手段と、前記算出された物体の存在確率と物体の不存在確率とに基づいて、前記検出された反射信号が物体からの反射信号であるとどれだけ信頼できるのかを示す信頼度を算出する信頼度算出手段と、を備えている。
【0008】
即ち、送信手段は、所定領域に信号を送信し、受信手段は、前記所定領域からの信号を受信する。検出手段は、前記受信された信号に基づいて、前記所定領域内に存在すると予想される判定対象として予め定めた物体からの反射信号を検出し、抽出手段は、前記反射信号の特徴量を抽出する。
【0009】
存在確率算出手段は、所定領域内の複数の位置に物体を配置して各位置の物体からの反射信号の特徴量を予め求め、該予め求めた各位置の物体からの反射信号の特徴量と前記抽出された特徴量とに基づいて、前記所定領域内の物体の存在確率を算出する。
【0010】
不存在確率算出手段は、所定領域内の複数の位置からのノイズ信号の特徴量を予め求め、該予め求めたノイズ信号の特徴量と前記抽出された特徴量とに基づいて前記所定領域内の物体の不存在確率を算出する。
【0011】
ここで、所定領域内に物体が存在する場合には、存在確率が高くなり不存在確率が低くなる。また、所定領域内に物体が存在しない場合には、存在確率が低くなり不存在確率が高くなる。
【0012】
信頼度算出手段は、前記算出された物体の存在確率と物体の不存在確率とに基づいて、前記検出された反射信号が物体からの反射信号であるとどれだけ信頼できるのかを示す信頼度を算出する。
【0013】
このように、物体の存在確率と物体の不存在確率とに基づいて、反射信号が物体からの反射信号であるとどれだけ信頼できるのかを示す信頼度を算出するので、信頼度を精度よく算出することができ、この結果、所定領域に物体が存在するか否かを正確に判定することに寄与することができる。
【0014】
請求項2記載の発明は、請求項1記載の発明において、前記受信された信号のピーク位置と前記所定領域内に存在すると予想される物体の位置とを特定する特定手段と、前記特定されたピーク位置と物体の位置との組み合わせから予め定めた、所定領域内に物体が存在するか否か不明である不明確率を算出する不明確率算出手段と、を更に備え、前記信頼度算出手段は、前記存在確率、前記不存在確率、及び前記不明確率に基づいて、前記信頼度を算出することを特徴とする。
【0015】
このように、物体の存在確率、物体の不存在確率、及び不明確率に基づいて、反射信号が物体からの反射信号であるとどれだけ信頼できるのかを示す信頼度を算出するので、信頼度をより精度よく算出することができ、この結果、所定領域に物体が存在するか否かをより正確に判定することに寄与することができる。
【0016】
なお、特徴量は、請求項3のように、前記反射信号の強度としてもよい。なお、その他、周期や周波数を用いてもよい。
【0017】
また、請求項4のように、前記算出された信頼度に基づいて、前記検出手段による反射信号の検出状態を制御する制御手段を更に備えるようにしてもよい。なお、検出状態としては、例えば、検出の開始、継続、中止等や、上記受信された信号から反射信号を検出する対象となる当該信号の範囲の特定等である。
【発明の効果】
【0018】
以上説明したように本発明は、物体の存在確率と物体の不存在確率とに基づいて、反射信号が物体からの反射信号であるとどれだけ信頼できるのかを示す信頼度を算出するので、信頼度を精度よく算出することができ、この結果、所定領域に物体が存在するか否かを正確に判定することに寄与することができる。
【発明を実施するための最良の形態】
【0019】
以下、図面を参照して、本発明の実施の形態を詳細に説明する。
【0020】
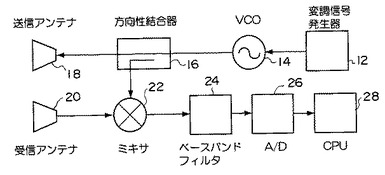
図1に示すように、本実施の形態の信頼度算出装置としての、図示しない車両に備えられた障害物認識装置では、送信信号のための送信波を生成する変調信号発生器12、電圧制御発振器(VCO)14、方向性結合器16、及送信手段としての送信アンテナ18を備え、送信アンテナ18から所定領域、例えば、車両の前方方向の領域に信号を送信する。
【0021】
また、障害物認識装置は、所定領域からの信号を受信する受信手段としての受信アンテナ20、送信波と受信波をミキシングするミキサ22、ベースバンド信号を通過させるベースバンドフィルタ24、ベースバンド信号をA/D変換するA/D変換器26、及びCPU28を備えている。
【0022】
CPU28は、図示しないROMに記憶された信頼度算出プログラムを実行するが、以下、図3を参照して、信頼度算出プログラムの機能ブロック図を説明する。
【0023】
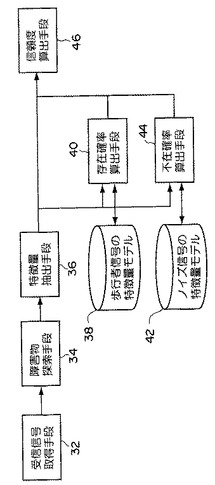
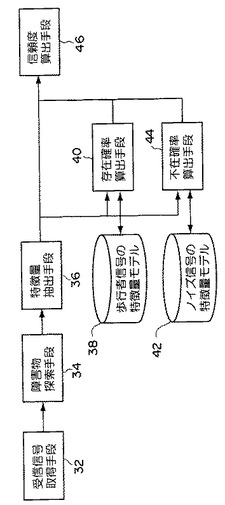
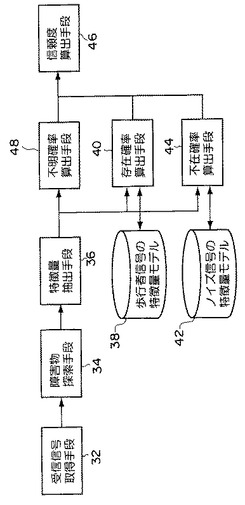
図3に示すように、上記A/D変換器26によりA/D変換されて得られた信号を取得する受信信号取得手段32と、前記取得された信号に基づいて、前記所定領域内に存在すると予想される判定対象として予め定めた物体(障害物、例えば、人(歩行者))からの反射信号を検出する検出手段としての障害物探索手段34と、前記反射信号の特徴量としてその強度を抽出する抽出手段としての特徴量抽出手段36と、所定領域内の複数の位置に物体を配置して各位置の物体からの反射信号の特徴量モデルを予め求め、該予め求めた各位置の物体からの反射信号の特徴量モデル(第1の記憶手段38に記憶された)と前記抽出された特徴量とに基づいて、前記所定領域内の物体の存在確率を算出する存在確率算出手段40と、所定領域内の複数の位置からのノイズ信号の特徴量モデルを予め求め、該予め求めたノイズ信号の特徴量モデル(第2の記憶手段42に記憶された)と前記抽出された特徴量とに基づいて前記所定領域内の物体の不存在確率を算出する不存在確率算出手段44と、前記算出された物体の存在確率と物体の不存在確率とに基づいて、前記検出された反射信号が前記物体からの反射信号であるとどれだけ信頼できるのかを示す信頼度を算出する信頼度算出手段46と、を備えている。
【0024】
次に、本実施の形態の作用を説明する。なお、本実施の形態では、障害物(歩行者)の存在を判定するための特徴量として受信強度を利用する場合の処理手順について述べる。なお、特徴量としては、その他、信号の周期や周波数等を用いるようにしてもよい。
【0025】
図1に示すように、送信アンテナ18から所定領域に信号を送信する。所定領域からの信号を受信アンテナ20が受信し、ミキサ22は、送信波と受信波をミキシングし、ベースバンドフィルタ24はベースバンド信号を通過し、A/D変換器26は、ベースバンド信号をA/D変換して受信信号とする。これは車載レーダでよく利用されるFM-CW方式の構成であるが、特にこの構成にこだわるものではない。
【0026】
そして、受信信号取得手段32は、上記A/D変換器26によりA/D変換されて得られた信号を取得する。
【0027】
障害物探索手段34は、周波数解析や到来方位推定を実行して、受信信号の中から障害物の信号及び障害物の位置(送信アンテナ18からの距離及び方位)を探索して、障害物の信号を得る。他センサの検出結果などが入手できる場合にはそれを基に障害物の信号を探索する。情報がない場合にはレーダが検出可能な全領域から障害物を探索する。
【0028】
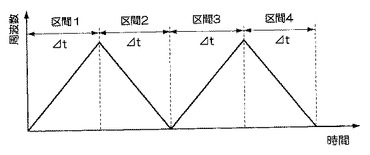
特徴量抽出手段36は、障害物探索手段34により得られた障害物の信号の受信強度を算出する。図2に示すように、レーダは通常、一度の観測で同じ信号を複数回出力する。したがって、各々の送信区間(図2の区間1〜4)に対して特徴量の抽出処理が実行される。
【0029】
存在確率算出手段40は、特徴量抽出手段36で検出された信号の強度を事前に作成しておいた障害物信号の特徴量モデル(確率分布モデル)を第1の記憶手段38から取得し、この特徴量モデルに照らし合わせて障害物の存在を表す確率値Peを計算する。
【0030】
以下、特徴量モデルの作成方法について示す。まず障害物の位置(距離および角度で決まる)を様々に変化させて受信信号を取得する。その受信信号から上記特徴量抽出手段36と同じ手順で障害物信号の特徴量が計算される。したがって、障害物の検出位置に対する信号強度の分布を得ることができる。これを数式モデルで近似する。例えば、位置(距離R、角度θ)における信号強度Aの分布を正規分布で近似すると次のような特徴量モデルを作成することができる。
【0031】
【数1】

【0032】
ただし、M(R、θ)は位置(R、θ)における障害物の信号強度の平均値を表し、σ(R、θ)は位置(R、θ)における障害物の信号強度の標準偏差を示す。
【0033】
なお、近似する数式モデルは正規分布に限るものではなく、レイリー分布やワイブル分布などの良く知られた確率分布を用いてもよい。このモデルに検出された信号強度を代入して、障害物の存在を示す確率値を計算する。
【0034】
上記のように、あらかじめ障害物(歩行者)の位置(距離と方位で決まる)を様々に変化させながら測定を繰り返し、それぞれの位置で障害物からの反射波の特徴量(信号強度)の分布を調べ、確率分布を当てはめることで近似的に特徴量分布モデルを生成しているので、障害物の位置と信号強度を基にして、観測信号の障害物らしさを計算することが可能となる。
【0035】
不存在確率算出手段44は、事前に作成しておいたノイズ信号の特徴量モデル(確率分布モデル)を第2の記憶手段42から取得し、特徴量抽出手段36で検出された信号の強度を、該取得したノイズ信号の特徴量モデルに照らし合わせて障害物が存在しないことを表す確率値Pnを計算する。ここで利用するノイズ信号の特徴量モデルの作成方法は上記と同様であるため説明を省略する。
【0036】
このように、障害物が存在しない場合、つまりノイズ信号についても同様の方法で確率分布モデルを作成するため、観測信号がノイズであるか否かも評価することが可能となる。
【0037】
信頼度算出手段46は、各送信区間に対する検出信号に対して計算された存在確率Peと不存在確率Pnとを統合して最終的な信頼度を算出する。これは、ベイズ理論などの確率理論を用いて統合してもよいし、単純な合算結果で双方を比較してもよい。さらに、それぞれの検出信号に基づいて、障害物までの距離や相対速度、角度などの情報を算出することも可能である。
【0038】
以上のように、歩行者が存在する場合には存在確率の割合が、存在しない場合には不存在確率の割合が高くなり、これらはいずれも同じハードウエアで実測された統計データに基づく情報であるため信頼性が高く、これらを用いて信頼度を算出しているので、精度のよい信頼度を算出することができ、この結果、障害物の精度のよい判定に寄与することができる。
【0039】
次に、第2の実施の形態を説明する。本実施の形態は、前述した第1の実施の形態と同様の構成を備えているので、同一部分には同一の符号を付してその説明を省略し、異なる部分のみを説明する。
【0040】
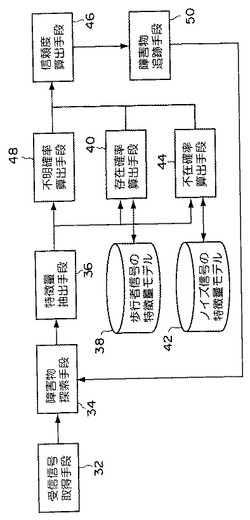
即ち、本実施の形態では、図4に示すように、特徴量抽出手段36により抽出された特徴量から、所定領域内に物体が存在するか否か不明である不明確率を算出する不明確率算出手段48を更に備えている。
【0041】
次に、本実施の形態の作用を説明する。本実施の形態の作用は、前述した第1の実施の形態と同様の作用部分があるので、異なる部分のみを説明する。
【0042】
前述した第1の実施の形態では、存在確率と不存在確率を手掛かりとして信頼度を算出したが、本実施の形態では不明確率も導入する。不明であるという曖昧性を持たせることによって、時系列情報の統合や他のセンサ出力の融合において検出の矛盾を防ぎ、障害物の存在判定を正しく迅速に行うことが可能となる。以下、具体的に説明する。
【0043】
不明確率算出手段48は、特徴量抽出の過程において、現在探索している信号の検出状況に応じて不明確率を算出する。
【0044】
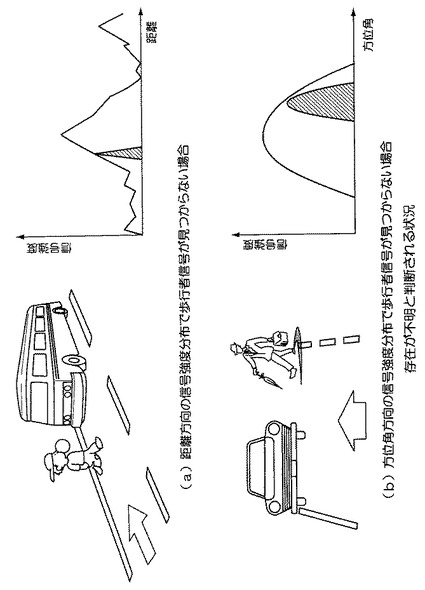
一般的にレーダでは距離方向の信号強度分布と方位方向の信号強度分布が計算され、その分布の中でピーク形状をなす強度値の高い信号が障害物として検出される。しかしながら、歩行者のように電波反射強度が高くない物体は周辺に存在する車両などからの強い反射信号に埋もれてしまうことがある。図6に存在が不明であると判断される状況の例を示す。例えば図6(a)のように、停車しているバスの後ろを歩行者が横断するような場合には、距離方向の信号強度分布においてバスより手前にいる歩行者の信号がバスからの反射信号の裾に埋もれてしまうことがある。また、図6(b)のように、駐車車両に歩み寄る人を測定した場合には、方位方向の信号強度分布において駐車車両からの反射信号の裾に歩行者信号が埋もれてしまうことがある。
【0045】
さらに、歩行者信号は歩行者の姿勢変化などに応じてその強度が大きく変動するため、上記のような特別な状況でなくても瞬間的に信号が弱くなり、ノイズ成分に埋もれてしまうこともある。本実施の形態では、以上のような状況を「不明」として取り扱う。
【0046】
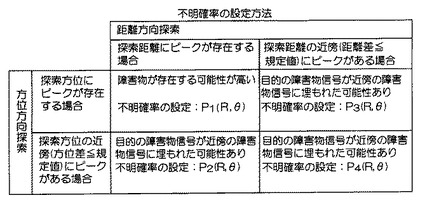
通常、レーダの障害物検出の手順としては、距離及び方位それぞれにおいて反射信号の強度分布を調べ、目的の位置に信号強度の高いピークが存在するか否かを探索する。該当するピークがみつかれば、それは障害物からの反射信号と推定される。しかしながら、歩行者のように反射信号がもともと低い障害物は近傍に存在する他の障害物の反射信号に埋もれて検出できない場合があるため、本実施の形態では、図9に示すように、特定されたピーク位置と物体の位置との組み合わせから予め定めた不明確率を設定する。図9に示す確率P1〜P4は障害物の位置(距離及び方位)に応じて変化する。その大小関係は、
0≦P1≦P2≦P4≦1
0≦P1≦P3≦P4≦1
となる。なお、上記存在確率、不存在確率、及び不明確率の合計は1となるように定める。
【0047】
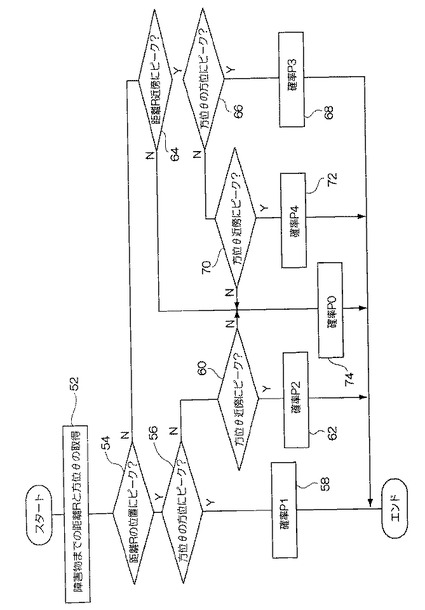
具体的には、図7に示すように、不明確率算出手段40は、ステップ52で、障害物探索手段34から、該障害物探索手段34により探索された障害物までの距離Rと方位θとを取得し、ステップ54で、距離Rにピークがあるか否かを判断し、距離Rにピークがあると判断された場合、ステップ56で、方位θにピークがあるか否かを判断する。
【0048】
方位θにピークがあると判断された場合には、ステップ58で、上記確率P1を設定する。方位θにピークがないと判断された場合、方位θの近傍にピークがある場合(ステップ60肯定)、ステップ62で、上記確率P2を設定する。
【0049】
ステップ54で、距離Rにピークがないと判断された場合、ステップ64で、距離Rの近傍にピークがあるか否か判断し、距離Rの近傍にピークがあると判断された場合、ステップ66で、方位θにピークがあるか否かを判断する。
【0050】
方位θにピークがあると判断された場合には、ステップ68で、上記確率P3を設定する。方位θにピークがないと判断された場合、方位の近傍にピークがある場合(ステップ70肯定)、ステップ62で、上記確率P4を設定する。
【0051】
なお、ステップ60、64、70が否定判定の場合には、所定の確率POを設定する。
【0052】
信頼度算出手段46は、各送信区間に算出された「存在・不明・不存在」の3つの確率から信頼度を算出する。3つの確率を統合する際に、Fuzzy理論やDempster-Shafer理論など曖昧性を含んだ確率推論を利用すると効果的である。確率推論の利用は時系列情報の統合にも効果的であるが、「存在・不明・不存在」の3つの確率の和を1にするような調整処理が必要となる場合もある。そのような予備的な処理もここで実行される。
【0053】
以下、Dempster-Shafer理論を用いた例を説明する。以下の式(1)は、2つの観測aと観測bの事後確率mの統合方法を示す式である。添え字i、jは状態を示し、本実施の形態では存在、不明、不存在の3つの状態に相当する。
【0054】
【数2】
【0055】
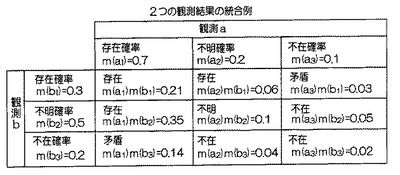
観測aに基づいて歩行者の存在確率、不明確率、不存在確率がそれぞれ0.7、0.2、0.1と計算され、観測bに基づいて歩行者の存在確率、不明確率、不存在確率がそれぞれ0.3、0.5、0.2と計算されたとする。
【0056】
2つの観測から計算された各確率をかけ合わせた結果を図10に示す。図10中で「矛盾」と表記した確率m(a3)m(b1)と確率m(a1)m(b3)の和が、式(1)の分母の第2項に相当する。
【0057】
結合後の各状態の確率は次のように求められる。
【0058】
【数3】
【0059】
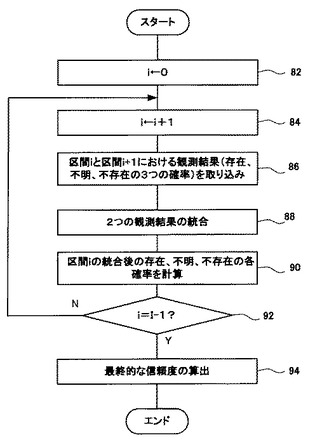
以上の手順により、図2に示した区間1〜区間4のそれぞれで検出された結果を統合して、各状態に対する確率を計算する。そして、3状態の確率に基づく閾値処理や条件判定により最終的な信頼度を算出する。
【0060】
即ち、図8に示すように、ステップ82で、区間を識別する変数iを0に初期化し、ステップ84で、変数iを1インクリメントし、ステップ86で、区間iと区間i+1における観測結果(存在、不明、不存在の3つの確率)を、上記各手段40、44、49から取得し、ステップ88で、観測結果を、図10に示すように統合する。ステップ90で、区間iの統合後の存在、不明、不存在の各確率を計算し、ステップ92で、変数iが総区間数I(=4)−1か否かを判断し、変数iがI−1でない場合には、ステップ84に戻って、以上の処理(ステップ84〜92)を実行し、変数iがI−1の場合には、ステップ94で、Fussy理論やDempster‐Shafer理論などの確率理論を用いた統合および(存在、不明、不存在の)3状態の確率に基づく閾値処理や条件判定により最終的な信頼度を算出する。
【0061】
以上説明したように本実施の形態では、存在確率、不存在確率、不明確率を用い、特に、不明であるという曖昧性を持たせることによって、時系列情報の統合や他のセンサ出力の融合において検出の矛盾を防ぎ、障害物の存在判定を正しく迅速に行うことが可能となる。
【0062】
次に、第3の実施の形態を説明する。本実施の形態は、前述した第2の実施の形態と同様の構成を備えているので、同一部分には同一の符号を付してその説明を省略し、異なる部分のみを説明する。
【0063】
即ち、本実施の形態では、図5に示すように、信頼度算出手段46により算出された信頼度に基づいて、障害物探索手段34の探索状態を制御する障害物追跡手段50を更に備えている。
【0064】
次に、本実施の形態の作用を説明する。本実施の形態の作用は、前述した第2の実施の形態と同様の作用部分があるので、異なる部分のみを説明する。
【0065】
本実施の形態の障害物探索手段34は、障害物追跡手段50からの追跡情報を利用して探索範囲を限定するものである。具体的には以下の通りである。
【0066】
障害物追跡手段50は、信頼度算出手段46により算出された信頼度を利用して、追跡の開始・継続・中止を判断する。追跡自体はαβフィルタやカルマンフィルタなどを利用する。
【0067】
障害物探索手段34は、障害物追跡手段50で計算される障害物の予測位置を利用して探索範囲を限定することによって、探索にかかる計算コストを削減することができる。
【0068】
なお、障害物の位置の予測以外に、障害物の追跡処理の開始、継続、中止等を指示するようにしてもよい。
【0069】
以上説明した第3の実施の形態では、障害物追跡手段50は、第2の実施の形態における信頼度算出手段46により算出された信頼度を利用しているが、本発明はこれに限定されるものではなく、第1の実施の形態における信頼度算出手段46により算出された信頼度を利用するようにしてもよい。
【図面の簡単な説明】
【0070】
【図1】第1の実施の形態における信頼度算出装置のブロック図である。
【図2】送信波形を示す図である。
【図3】第1の実施の形態における信頼度算出装置の機能ブロック図である。
【図4】第2の実施の形態における信頼度算出装置の機能ブロック図である。
【図5】第3の実施の形態における信頼度算出装置の機能ブロック図である。
【図6】(a)及び(b)は、歩行者からの電波反射信号が周辺に存在する車両などからの電波反射信号に埋もれてしまうことを示す図である。
【図7】不明確率算出手段の具体的処理内容を示すフローチャートである。
【図8】信頼度算出手段の具体的処理内容を示すフローチャートである。
【図9】不明確率の設定方法を示す表である。
【図10】2つの観測結果の統合例を示す表である。
【符号の説明】
【0071】
18 送信アンテナ(送信手段)
20 受信アンテナ(受信手段)
34 障害物探索手段(検出手段)
36 特徴量抽出手段(抽出手段)
40 存在確率算出手段
44 不存在確率算出手段
46 信頼度算出手段
48 不明確率算出手段
50 障害物追跡手段(制御手段)
【技術分野】
【0001】
本発明は、信頼度算出装置にかかり、より詳細には、所定領域内に存在する物体からの反射信号がどれだけ信頼できるのかを示す信頼度を算出する信頼度算出装置に関する。
【背景技術】
【0002】
従来、レーダ装置等を用いて所定領域内に障害物(例えば、歩行者)が存在するか否かを検出する検出性能の向上を目的として、検出の信頼性を評価する障害物認識装置が種々提案されている。
【0003】
例えば、多数決判定(N中M検出処理)により目標の有無を判定する技術(特許文献1)、検出回数に基づいて信頼度を判定する技術(特許文献2)、受信電力や到来方位の差、観測と予測の位置誤差、及び観測回数等によって検出結果の信頼性を評価する技術(特許文献3)、距離と角度で決まる検出領域に応じて受信強度の閾値を設定して車両か非車両かを判定する技術(特許文献4)などである。
【特許文献1】特開2001−194452号公報
【特許文献2】特開2004−117071号公報
【特許文献3】特開2004−017763号公報
【特許文献4】特開2002−040139号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、ミリ波レーダで歩行者を観測した場合、歩行者から反射して受信した信号には、 車両から反射して受信した信号に比べて反射強度が非常に低く(SN比が小さい)、歩行者の様々な姿勢変化などに伴って反射強度が時々刻々と変化するという特徴があり、上記の従来技術ではその存在を正確に判定することが困難である。
【0005】
なお、反射強度のSN比が上記のように小さいだけでなく、SN比自体の変動幅も大きいため、特許文献4の従来技術のように固定した閾値を設定することは容易ではない。さらに、同様の理由から、特許文献3のように受信電力の差によって信頼性を評価することも難しい。更に、観測回数を増やして信頼性を判定する特許文献1及び特許文献2の従来技術は、閾値設定の困難さのほかに検出時間の遅れが発生する点も問題となり、衝突回避等のアプリケーションへの利用には不向きである。
【0006】
本発明は、上記事実に鑑み成されたもので、所定領域に判定対象として予め定めた物体が存在するか否かを正確かつ迅速に判定することに寄与可能な信頼度算出装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために請求項1に記載の発明の信頼度算出装置は、所定領域に信号を送信する送信手段と、前記所定領域からの信号を受信する受信手段と、前記受信された信号に基づいて、前記所定領域内に存在すると予想される判定対象として予め定めた物体からの反射信号を検出する検出手段と、前記反射信号の特徴量を抽出する抽出手段と、所定領域内の複数の位置に物体を配置して各位置の物体からの反射信号の特徴量を予め求め、該予め求めた各位置の物体からの反射信号の特徴量と前記抽出された特徴量とに基づいて、前記所定領域内の物体の存在確率を算出する存在確率算出手段と、所定領域内の複数の位置からのノイズ信号の特徴量を予め求め、該予め求めたノイズ信号の特徴量と前記抽出された特徴量とに基づいて前記所定領域内の物体の不存在確率を算出する不存在確率算出手段と、前記算出された物体の存在確率と物体の不存在確率とに基づいて、前記検出された反射信号が物体からの反射信号であるとどれだけ信頼できるのかを示す信頼度を算出する信頼度算出手段と、を備えている。
【0008】
即ち、送信手段は、所定領域に信号を送信し、受信手段は、前記所定領域からの信号を受信する。検出手段は、前記受信された信号に基づいて、前記所定領域内に存在すると予想される判定対象として予め定めた物体からの反射信号を検出し、抽出手段は、前記反射信号の特徴量を抽出する。
【0009】
存在確率算出手段は、所定領域内の複数の位置に物体を配置して各位置の物体からの反射信号の特徴量を予め求め、該予め求めた各位置の物体からの反射信号の特徴量と前記抽出された特徴量とに基づいて、前記所定領域内の物体の存在確率を算出する。
【0010】
不存在確率算出手段は、所定領域内の複数の位置からのノイズ信号の特徴量を予め求め、該予め求めたノイズ信号の特徴量と前記抽出された特徴量とに基づいて前記所定領域内の物体の不存在確率を算出する。
【0011】
ここで、所定領域内に物体が存在する場合には、存在確率が高くなり不存在確率が低くなる。また、所定領域内に物体が存在しない場合には、存在確率が低くなり不存在確率が高くなる。
【0012】
信頼度算出手段は、前記算出された物体の存在確率と物体の不存在確率とに基づいて、前記検出された反射信号が物体からの反射信号であるとどれだけ信頼できるのかを示す信頼度を算出する。
【0013】
このように、物体の存在確率と物体の不存在確率とに基づいて、反射信号が物体からの反射信号であるとどれだけ信頼できるのかを示す信頼度を算出するので、信頼度を精度よく算出することができ、この結果、所定領域に物体が存在するか否かを正確に判定することに寄与することができる。
【0014】
請求項2記載の発明は、請求項1記載の発明において、前記受信された信号のピーク位置と前記所定領域内に存在すると予想される物体の位置とを特定する特定手段と、前記特定されたピーク位置と物体の位置との組み合わせから予め定めた、所定領域内に物体が存在するか否か不明である不明確率を算出する不明確率算出手段と、を更に備え、前記信頼度算出手段は、前記存在確率、前記不存在確率、及び前記不明確率に基づいて、前記信頼度を算出することを特徴とする。
【0015】
このように、物体の存在確率、物体の不存在確率、及び不明確率に基づいて、反射信号が物体からの反射信号であるとどれだけ信頼できるのかを示す信頼度を算出するので、信頼度をより精度よく算出することができ、この結果、所定領域に物体が存在するか否かをより正確に判定することに寄与することができる。
【0016】
なお、特徴量は、請求項3のように、前記反射信号の強度としてもよい。なお、その他、周期や周波数を用いてもよい。
【0017】
また、請求項4のように、前記算出された信頼度に基づいて、前記検出手段による反射信号の検出状態を制御する制御手段を更に備えるようにしてもよい。なお、検出状態としては、例えば、検出の開始、継続、中止等や、上記受信された信号から反射信号を検出する対象となる当該信号の範囲の特定等である。
【発明の効果】
【0018】
以上説明したように本発明は、物体の存在確率と物体の不存在確率とに基づいて、反射信号が物体からの反射信号であるとどれだけ信頼できるのかを示す信頼度を算出するので、信頼度を精度よく算出することができ、この結果、所定領域に物体が存在するか否かを正確に判定することに寄与することができる。
【発明を実施するための最良の形態】
【0019】
以下、図面を参照して、本発明の実施の形態を詳細に説明する。
【0020】
図1に示すように、本実施の形態の信頼度算出装置としての、図示しない車両に備えられた障害物認識装置では、送信信号のための送信波を生成する変調信号発生器12、電圧制御発振器(VCO)14、方向性結合器16、及送信手段としての送信アンテナ18を備え、送信アンテナ18から所定領域、例えば、車両の前方方向の領域に信号を送信する。
【0021】
また、障害物認識装置は、所定領域からの信号を受信する受信手段としての受信アンテナ20、送信波と受信波をミキシングするミキサ22、ベースバンド信号を通過させるベースバンドフィルタ24、ベースバンド信号をA/D変換するA/D変換器26、及びCPU28を備えている。
【0022】
CPU28は、図示しないROMに記憶された信頼度算出プログラムを実行するが、以下、図3を参照して、信頼度算出プログラムの機能ブロック図を説明する。
【0023】
図3に示すように、上記A/D変換器26によりA/D変換されて得られた信号を取得する受信信号取得手段32と、前記取得された信号に基づいて、前記所定領域内に存在すると予想される判定対象として予め定めた物体(障害物、例えば、人(歩行者))からの反射信号を検出する検出手段としての障害物探索手段34と、前記反射信号の特徴量としてその強度を抽出する抽出手段としての特徴量抽出手段36と、所定領域内の複数の位置に物体を配置して各位置の物体からの反射信号の特徴量モデルを予め求め、該予め求めた各位置の物体からの反射信号の特徴量モデル(第1の記憶手段38に記憶された)と前記抽出された特徴量とに基づいて、前記所定領域内の物体の存在確率を算出する存在確率算出手段40と、所定領域内の複数の位置からのノイズ信号の特徴量モデルを予め求め、該予め求めたノイズ信号の特徴量モデル(第2の記憶手段42に記憶された)と前記抽出された特徴量とに基づいて前記所定領域内の物体の不存在確率を算出する不存在確率算出手段44と、前記算出された物体の存在確率と物体の不存在確率とに基づいて、前記検出された反射信号が前記物体からの反射信号であるとどれだけ信頼できるのかを示す信頼度を算出する信頼度算出手段46と、を備えている。
【0024】
次に、本実施の形態の作用を説明する。なお、本実施の形態では、障害物(歩行者)の存在を判定するための特徴量として受信強度を利用する場合の処理手順について述べる。なお、特徴量としては、その他、信号の周期や周波数等を用いるようにしてもよい。
【0025】
図1に示すように、送信アンテナ18から所定領域に信号を送信する。所定領域からの信号を受信アンテナ20が受信し、ミキサ22は、送信波と受信波をミキシングし、ベースバンドフィルタ24はベースバンド信号を通過し、A/D変換器26は、ベースバンド信号をA/D変換して受信信号とする。これは車載レーダでよく利用されるFM-CW方式の構成であるが、特にこの構成にこだわるものではない。
【0026】
そして、受信信号取得手段32は、上記A/D変換器26によりA/D変換されて得られた信号を取得する。
【0027】
障害物探索手段34は、周波数解析や到来方位推定を実行して、受信信号の中から障害物の信号及び障害物の位置(送信アンテナ18からの距離及び方位)を探索して、障害物の信号を得る。他センサの検出結果などが入手できる場合にはそれを基に障害物の信号を探索する。情報がない場合にはレーダが検出可能な全領域から障害物を探索する。
【0028】
特徴量抽出手段36は、障害物探索手段34により得られた障害物の信号の受信強度を算出する。図2に示すように、レーダは通常、一度の観測で同じ信号を複数回出力する。したがって、各々の送信区間(図2の区間1〜4)に対して特徴量の抽出処理が実行される。
【0029】
存在確率算出手段40は、特徴量抽出手段36で検出された信号の強度を事前に作成しておいた障害物信号の特徴量モデル(確率分布モデル)を第1の記憶手段38から取得し、この特徴量モデルに照らし合わせて障害物の存在を表す確率値Peを計算する。
【0030】
以下、特徴量モデルの作成方法について示す。まず障害物の位置(距離および角度で決まる)を様々に変化させて受信信号を取得する。その受信信号から上記特徴量抽出手段36と同じ手順で障害物信号の特徴量が計算される。したがって、障害物の検出位置に対する信号強度の分布を得ることができる。これを数式モデルで近似する。例えば、位置(距離R、角度θ)における信号強度Aの分布を正規分布で近似すると次のような特徴量モデルを作成することができる。
【0031】
【数1】
【0032】
ただし、M(R、θ)は位置(R、θ)における障害物の信号強度の平均値を表し、σ(R、θ)は位置(R、θ)における障害物の信号強度の標準偏差を示す。
【0033】
なお、近似する数式モデルは正規分布に限るものではなく、レイリー分布やワイブル分布などの良く知られた確率分布を用いてもよい。このモデルに検出された信号強度を代入して、障害物の存在を示す確率値を計算する。
【0034】
上記のように、あらかじめ障害物(歩行者)の位置(距離と方位で決まる)を様々に変化させながら測定を繰り返し、それぞれの位置で障害物からの反射波の特徴量(信号強度)の分布を調べ、確率分布を当てはめることで近似的に特徴量分布モデルを生成しているので、障害物の位置と信号強度を基にして、観測信号の障害物らしさを計算することが可能となる。
【0035】
不存在確率算出手段44は、事前に作成しておいたノイズ信号の特徴量モデル(確率分布モデル)を第2の記憶手段42から取得し、特徴量抽出手段36で検出された信号の強度を、該取得したノイズ信号の特徴量モデルに照らし合わせて障害物が存在しないことを表す確率値Pnを計算する。ここで利用するノイズ信号の特徴量モデルの作成方法は上記と同様であるため説明を省略する。
【0036】
このように、障害物が存在しない場合、つまりノイズ信号についても同様の方法で確率分布モデルを作成するため、観測信号がノイズであるか否かも評価することが可能となる。
【0037】
信頼度算出手段46は、各送信区間に対する検出信号に対して計算された存在確率Peと不存在確率Pnとを統合して最終的な信頼度を算出する。これは、ベイズ理論などの確率理論を用いて統合してもよいし、単純な合算結果で双方を比較してもよい。さらに、それぞれの検出信号に基づいて、障害物までの距離や相対速度、角度などの情報を算出することも可能である。
【0038】
以上のように、歩行者が存在する場合には存在確率の割合が、存在しない場合には不存在確率の割合が高くなり、これらはいずれも同じハードウエアで実測された統計データに基づく情報であるため信頼性が高く、これらを用いて信頼度を算出しているので、精度のよい信頼度を算出することができ、この結果、障害物の精度のよい判定に寄与することができる。
【0039】
次に、第2の実施の形態を説明する。本実施の形態は、前述した第1の実施の形態と同様の構成を備えているので、同一部分には同一の符号を付してその説明を省略し、異なる部分のみを説明する。
【0040】
即ち、本実施の形態では、図4に示すように、特徴量抽出手段36により抽出された特徴量から、所定領域内に物体が存在するか否か不明である不明確率を算出する不明確率算出手段48を更に備えている。
【0041】
次に、本実施の形態の作用を説明する。本実施の形態の作用は、前述した第1の実施の形態と同様の作用部分があるので、異なる部分のみを説明する。
【0042】
前述した第1の実施の形態では、存在確率と不存在確率を手掛かりとして信頼度を算出したが、本実施の形態では不明確率も導入する。不明であるという曖昧性を持たせることによって、時系列情報の統合や他のセンサ出力の融合において検出の矛盾を防ぎ、障害物の存在判定を正しく迅速に行うことが可能となる。以下、具体的に説明する。
【0043】
不明確率算出手段48は、特徴量抽出の過程において、現在探索している信号の検出状況に応じて不明確率を算出する。
【0044】
一般的にレーダでは距離方向の信号強度分布と方位方向の信号強度分布が計算され、その分布の中でピーク形状をなす強度値の高い信号が障害物として検出される。しかしながら、歩行者のように電波反射強度が高くない物体は周辺に存在する車両などからの強い反射信号に埋もれてしまうことがある。図6に存在が不明であると判断される状況の例を示す。例えば図6(a)のように、停車しているバスの後ろを歩行者が横断するような場合には、距離方向の信号強度分布においてバスより手前にいる歩行者の信号がバスからの反射信号の裾に埋もれてしまうことがある。また、図6(b)のように、駐車車両に歩み寄る人を測定した場合には、方位方向の信号強度分布において駐車車両からの反射信号の裾に歩行者信号が埋もれてしまうことがある。
【0045】
さらに、歩行者信号は歩行者の姿勢変化などに応じてその強度が大きく変動するため、上記のような特別な状況でなくても瞬間的に信号が弱くなり、ノイズ成分に埋もれてしまうこともある。本実施の形態では、以上のような状況を「不明」として取り扱う。
【0046】
通常、レーダの障害物検出の手順としては、距離及び方位それぞれにおいて反射信号の強度分布を調べ、目的の位置に信号強度の高いピークが存在するか否かを探索する。該当するピークがみつかれば、それは障害物からの反射信号と推定される。しかしながら、歩行者のように反射信号がもともと低い障害物は近傍に存在する他の障害物の反射信号に埋もれて検出できない場合があるため、本実施の形態では、図9に示すように、特定されたピーク位置と物体の位置との組み合わせから予め定めた不明確率を設定する。図9に示す確率P1〜P4は障害物の位置(距離及び方位)に応じて変化する。その大小関係は、
0≦P1≦P2≦P4≦1
0≦P1≦P3≦P4≦1
となる。なお、上記存在確率、不存在確率、及び不明確率の合計は1となるように定める。
【0047】
具体的には、図7に示すように、不明確率算出手段40は、ステップ52で、障害物探索手段34から、該障害物探索手段34により探索された障害物までの距離Rと方位θとを取得し、ステップ54で、距離Rにピークがあるか否かを判断し、距離Rにピークがあると判断された場合、ステップ56で、方位θにピークがあるか否かを判断する。
【0048】
方位θにピークがあると判断された場合には、ステップ58で、上記確率P1を設定する。方位θにピークがないと判断された場合、方位θの近傍にピークがある場合(ステップ60肯定)、ステップ62で、上記確率P2を設定する。
【0049】
ステップ54で、距離Rにピークがないと判断された場合、ステップ64で、距離Rの近傍にピークがあるか否か判断し、距離Rの近傍にピークがあると判断された場合、ステップ66で、方位θにピークがあるか否かを判断する。
【0050】
方位θにピークがあると判断された場合には、ステップ68で、上記確率P3を設定する。方位θにピークがないと判断された場合、方位の近傍にピークがある場合(ステップ70肯定)、ステップ62で、上記確率P4を設定する。
【0051】
なお、ステップ60、64、70が否定判定の場合には、所定の確率POを設定する。
【0052】
信頼度算出手段46は、各送信区間に算出された「存在・不明・不存在」の3つの確率から信頼度を算出する。3つの確率を統合する際に、Fuzzy理論やDempster-Shafer理論など曖昧性を含んだ確率推論を利用すると効果的である。確率推論の利用は時系列情報の統合にも効果的であるが、「存在・不明・不存在」の3つの確率の和を1にするような調整処理が必要となる場合もある。そのような予備的な処理もここで実行される。
【0053】
以下、Dempster-Shafer理論を用いた例を説明する。以下の式(1)は、2つの観測aと観測bの事後確率mの統合方法を示す式である。添え字i、jは状態を示し、本実施の形態では存在、不明、不存在の3つの状態に相当する。
【0054】
【数2】
【0055】
観測aに基づいて歩行者の存在確率、不明確率、不存在確率がそれぞれ0.7、0.2、0.1と計算され、観測bに基づいて歩行者の存在確率、不明確率、不存在確率がそれぞれ0.3、0.5、0.2と計算されたとする。
【0056】
2つの観測から計算された各確率をかけ合わせた結果を図10に示す。図10中で「矛盾」と表記した確率m(a3)m(b1)と確率m(a1)m(b3)の和が、式(1)の分母の第2項に相当する。
【0057】
結合後の各状態の確率は次のように求められる。
【0058】
【数3】
【0059】
以上の手順により、図2に示した区間1〜区間4のそれぞれで検出された結果を統合して、各状態に対する確率を計算する。そして、3状態の確率に基づく閾値処理や条件判定により最終的な信頼度を算出する。
【0060】
即ち、図8に示すように、ステップ82で、区間を識別する変数iを0に初期化し、ステップ84で、変数iを1インクリメントし、ステップ86で、区間iと区間i+1における観測結果(存在、不明、不存在の3つの確率)を、上記各手段40、44、49から取得し、ステップ88で、観測結果を、図10に示すように統合する。ステップ90で、区間iの統合後の存在、不明、不存在の各確率を計算し、ステップ92で、変数iが総区間数I(=4)−1か否かを判断し、変数iがI−1でない場合には、ステップ84に戻って、以上の処理(ステップ84〜92)を実行し、変数iがI−1の場合には、ステップ94で、Fussy理論やDempster‐Shafer理論などの確率理論を用いた統合および(存在、不明、不存在の)3状態の確率に基づく閾値処理や条件判定により最終的な信頼度を算出する。
【0061】
以上説明したように本実施の形態では、存在確率、不存在確率、不明確率を用い、特に、不明であるという曖昧性を持たせることによって、時系列情報の統合や他のセンサ出力の融合において検出の矛盾を防ぎ、障害物の存在判定を正しく迅速に行うことが可能となる。
【0062】
次に、第3の実施の形態を説明する。本実施の形態は、前述した第2の実施の形態と同様の構成を備えているので、同一部分には同一の符号を付してその説明を省略し、異なる部分のみを説明する。
【0063】
即ち、本実施の形態では、図5に示すように、信頼度算出手段46により算出された信頼度に基づいて、障害物探索手段34の探索状態を制御する障害物追跡手段50を更に備えている。
【0064】
次に、本実施の形態の作用を説明する。本実施の形態の作用は、前述した第2の実施の形態と同様の作用部分があるので、異なる部分のみを説明する。
【0065】
本実施の形態の障害物探索手段34は、障害物追跡手段50からの追跡情報を利用して探索範囲を限定するものである。具体的には以下の通りである。
【0066】
障害物追跡手段50は、信頼度算出手段46により算出された信頼度を利用して、追跡の開始・継続・中止を判断する。追跡自体はαβフィルタやカルマンフィルタなどを利用する。
【0067】
障害物探索手段34は、障害物追跡手段50で計算される障害物の予測位置を利用して探索範囲を限定することによって、探索にかかる計算コストを削減することができる。
【0068】
なお、障害物の位置の予測以外に、障害物の追跡処理の開始、継続、中止等を指示するようにしてもよい。
【0069】
以上説明した第3の実施の形態では、障害物追跡手段50は、第2の実施の形態における信頼度算出手段46により算出された信頼度を利用しているが、本発明はこれに限定されるものではなく、第1の実施の形態における信頼度算出手段46により算出された信頼度を利用するようにしてもよい。
【図面の簡単な説明】
【0070】
【図1】第1の実施の形態における信頼度算出装置のブロック図である。
【図2】送信波形を示す図である。
【図3】第1の実施の形態における信頼度算出装置の機能ブロック図である。
【図4】第2の実施の形態における信頼度算出装置の機能ブロック図である。
【図5】第3の実施の形態における信頼度算出装置の機能ブロック図である。
【図6】(a)及び(b)は、歩行者からの電波反射信号が周辺に存在する車両などからの電波反射信号に埋もれてしまうことを示す図である。
【図7】不明確率算出手段の具体的処理内容を示すフローチャートである。
【図8】信頼度算出手段の具体的処理内容を示すフローチャートである。
【図9】不明確率の設定方法を示す表である。
【図10】2つの観測結果の統合例を示す表である。
【符号の説明】
【0071】
18 送信アンテナ(送信手段)
20 受信アンテナ(受信手段)
34 障害物探索手段(検出手段)
36 特徴量抽出手段(抽出手段)
40 存在確率算出手段
44 不存在確率算出手段
46 信頼度算出手段
48 不明確率算出手段
50 障害物追跡手段(制御手段)
【特許請求の範囲】
【請求項1】
所定領域に信号を送信する送信手段と、
前記所定領域からの信号を受信する受信手段と、
前記受信された信号に基づいて、前記所定領域内に存在すると予想される判定対象として予め定めた物体からの反射信号を検出する検出手段と、
前記反射信号の特徴量を抽出する抽出手段と、
所定領域内の複数の位置に物体を配置して各位置の物体からの反射信号の特徴量を予め求め、該予め求めた各位置の物体からの反射信号の特徴量と前記抽出された特徴量とに基づいて、前記所定領域内の物体の存在確率を算出する存在確率算出手段と、
所定領域内の複数の位置からのノイズ信号の特徴量を予め求め、該予め求めたノイズ信号の特徴量と前記抽出された特徴量とに基づいて前記所定領域内の物体の不存在確率を算出する不存在確率算出手段と、
前記算出された物体の存在確率と物体の不存在確率とに基づいて、前記検出された反射信号が前記物体からの反射信号であるとどれだけ信頼できるのかを示す信頼度を算出する信頼度算出手段と、
を備えた信頼度算出装置。
【請求項2】
前記受信された信号のピーク位置と前記所定領域内に存在すると予想される前記物体の位置とを特定する特定手段と、
前記特定されたピーク位置と物体の位置との組み合わせから予め定めた、所定領域内に物体が存在するか否か不明である不明確率を算出する不明確率算出手段と、
を更に備え、
前記信頼度算出手段は、前記存在確率、前記不存在確率、及び前記不明確率に基づいて、前記信頼度を算出する
ことを特徴とする請求項1記載の信頼度算出装置。
【請求項3】
前記特徴量は、前記反射信号の強度であることを特徴とする請求項1又は請求項2記載の信頼度算出装置。
【請求項4】
前記算出された信頼度に基づいて、前記検出手段による反射信号の検出状態を制御する制御手段を更に備えたことを特徴とする請求項1乃至請求項3の何れか1項に記載の信頼度算出装置。
【請求項1】
所定領域に信号を送信する送信手段と、
前記所定領域からの信号を受信する受信手段と、
前記受信された信号に基づいて、前記所定領域内に存在すると予想される判定対象として予め定めた物体からの反射信号を検出する検出手段と、
前記反射信号の特徴量を抽出する抽出手段と、
所定領域内の複数の位置に物体を配置して各位置の物体からの反射信号の特徴量を予め求め、該予め求めた各位置の物体からの反射信号の特徴量と前記抽出された特徴量とに基づいて、前記所定領域内の物体の存在確率を算出する存在確率算出手段と、
所定領域内の複数の位置からのノイズ信号の特徴量を予め求め、該予め求めたノイズ信号の特徴量と前記抽出された特徴量とに基づいて前記所定領域内の物体の不存在確率を算出する不存在確率算出手段と、
前記算出された物体の存在確率と物体の不存在確率とに基づいて、前記検出された反射信号が前記物体からの反射信号であるとどれだけ信頼できるのかを示す信頼度を算出する信頼度算出手段と、
を備えた信頼度算出装置。
【請求項2】
前記受信された信号のピーク位置と前記所定領域内に存在すると予想される前記物体の位置とを特定する特定手段と、
前記特定されたピーク位置と物体の位置との組み合わせから予め定めた、所定領域内に物体が存在するか否か不明である不明確率を算出する不明確率算出手段と、
を更に備え、
前記信頼度算出手段は、前記存在確率、前記不存在確率、及び前記不明確率に基づいて、前記信頼度を算出する
ことを特徴とする請求項1記載の信頼度算出装置。
【請求項3】
前記特徴量は、前記反射信号の強度であることを特徴とする請求項1又は請求項2記載の信頼度算出装置。
【請求項4】
前記算出された信頼度に基づいて、前記検出手段による反射信号の検出状態を制御する制御手段を更に備えたことを特徴とする請求項1乃至請求項3の何れか1項に記載の信頼度算出装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−93461(P2007−93461A)
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願番号】特願2005−284784(P2005−284784)
【出願日】平成17年9月29日(2005.9.29)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願日】平成17年9月29日(2005.9.29)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
[ Back to top ]