
修正機能付車両搭載型ナビゲーションシステム及びその表示方法
【課題】修正機能付車両搭載型ナビゲーションシステム及びその表示方法の提供。
【解決手段】本発明は一種の修正機能付車両搭載型ナビゲーションシステム及びその表示方法に関わるものである。本システムは現時点の表示位置を検出し、対応する道路とのリンクを読み取り、次の車両位置を検出して、距離が25メートル以下の道路リンクを選択し、第1組の道路リンクを生成する。引き続き、ジャイロ装置より生成する方向信号を次の走行角度として、第1組の道路リンクから次の走行方向の角度が50以下の道路リンクを選択し、第2組の道路リンクを生成する。その後、次の車両位置と第2組の道路リンクとの直線距離を計算し、最短の直線距離の道路にリンクする。最後に、次の車両位置を最短直線距離の道路リンクの投射点を次の修正位置と設定し、車両を代表する信号を次の修正位置に対応した次の表示位置に表示させる。
【解決手段】本発明は一種の修正機能付車両搭載型ナビゲーションシステム及びその表示方法に関わるものである。本システムは現時点の表示位置を検出し、対応する道路とのリンクを読み取り、次の車両位置を検出して、距離が25メートル以下の道路リンクを選択し、第1組の道路リンクを生成する。引き続き、ジャイロ装置より生成する方向信号を次の走行角度として、第1組の道路リンクから次の走行方向の角度が50以下の道路リンクを選択し、第2組の道路リンクを生成する。その後、次の車両位置と第2組の道路リンクとの直線距離を計算し、最短の直線距離の道路にリンクする。最後に、次の車両位置を最短直線距離の道路リンクの投射点を次の修正位置と設定し、車両を代表する信号を次の修正位置に対応した次の表示位置に表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は一種車両搭載型ナビゲーションシステム及びその表示方法、特に一種の表示装置に修正後の車両信号位置を表示可能な修正機能付車両搭載型ナビゲーションシステム及びその表示方法に関わるものである。
【背景技術】
【0002】
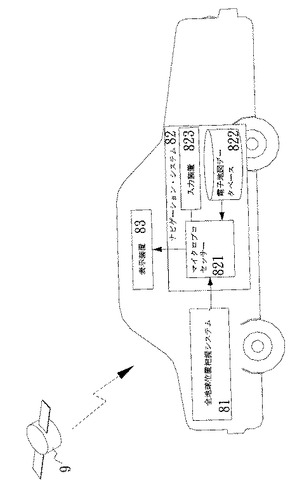
図1に示すものは、車内に全地球位置把握システム(Global Positioning System, GPS)81とナビゲーションシステム82を設けた、従来のナビゲーションシステム(Navigation) 機能付の車両である。公知技術の全地球位置把握システム81は、つねに大気圏外に打ち上げた複数の地球投影位置決定衛星9の信号を受信し、車両その時点の車両座標を随時に演算する。ナビゲーションシステム82のマイクロプロセッサー821により、内蔵の電子地図データベース822との比較を行い、その時点における車両の電子地図データベース822における地図データベースの対応位置を算出した上、その車両の位置信号を該表示装置83に表示させ、車両の位置を操縦者に知らせる。
【0003】
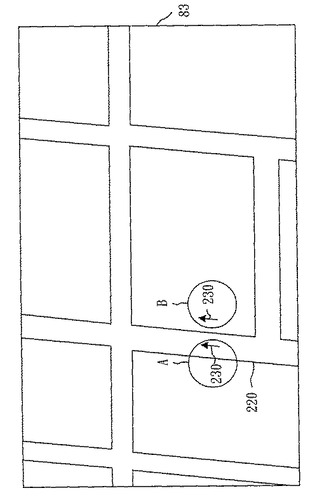
しかしながら、全地球位置把握システム81は精度の原因により、図2の状況がしばしば発生する。図2に示すものは、公知技術の車両搭載型ナビゲーションシステムより生成したエラーメッセージの概略図である。図2に示すとおり、操縦者が車両を道路220上の運転において、正常のときは該車両の位置信号230は画面上の道路220にて、円形Aを表示する。しかしながら、全地球位置把握システム81の精度誤差により、該マイクロプロセッサー821は誤差あったその時点における車両の座標を内蔵の電子地図データベース822と比較した上、該マイクロプロセッサー821より該車両の位置信号230を円形Bにて、道路220からはずれて表示される。このような間違い表示により、操縦者は道路状況に戸惑い、車両搭載型ナビゲーションシステムに対する信頼感を低下してしまう。また、車両がトンネル内で走行するとき、複数の地球投影位置決定衛星9の信号を受けられないため、その時点で算出された車両座標は正確ではない。該マイクロプロセッサー821はその時点の不正確な車両座標を内蔵の電子地図データベース822との比較を行い、該マイクロプロセッサー821より該車両の位置信号230を間違った場所に表示される。よって、公知技術の車両搭載型ナビゲーションシステムは、改善の必要がある。
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の修正機能付車両搭載型ナビゲーションシステム及びその表示方法は、以下の構成要素を備える。ジャイロ装置、表示スクリーン、及び電子地図データベースを設け、該ジャイロ装置より車両走行方向角度を生成し、該電子地図データベースは複数の道路リンクを内蔵する。該表示方法は車両の位置信号を該表示スクリーンの表示位置に表示する。そのうち、該表示方法は以下の手順を含まれる。(A)現時点の表示位置を捉えて、(B)該電子地図データベースより現時点の表示位置に対応する道路とのリンク及びを読み取り、該道路リンクとリンクした一つ以上の道路にリンクする。(C)次の車両位置を捕捉し、(D)該対応の道路リンク及び該一つ以上の道路リンクから、次の車両位置の第1特定距離より少ない道路リンクを選択し、第1組道路リンクを生成して、該第1組道路リンクに一つ以上の道路リンクが存在するか否かを判断する。(E)手順(D)により、該第1組道路リンクに一つ以上の道路リンクの存在を判断したとき、該ジャイロ装置より生成した車両走行方向角度を次の車両走行方向角度に設定する。(F)該第1組道路リンクより、次の車両走行方向角度が第1特定角度より小さい道路リンクを選択し、第2組の道路リンクを生成して、該第2組の道路リンクに一つ以上の道路リンクが存在するか否かを判断する。(G)手順(F)により、該第2組の道路リンクに一つ以上の道路リンクが判断されたとき、該次の車両位置と該第2組の道路リンクの直線距離を算出し、該次の車両位置の最短直線距離の道路リンクを選択し、該次の車両位置が該最短直線距離の道路リンクの投射点を次の修正位置に設定する。(H)該車両の位置信号を該表示スクリーンの次の表示位置に表示する。そのうち、該次の表示位置は該次の修正位置に対応した該表示スクリーンの位置である。
【0005】
本発明の修正機能付車両搭載型ナビゲーションシステムは、ジャイロ装置、全地球位置把握システム、電子地図データベース、表示スクリーン及び制御装置より構成する。該ジャイロ装置は該車両に取り付けて、該車両の進行方向を検出し、車両走行方向角度を生成する。該全地球位置把握システムを該車両に取り付け、複数の衛星信号を受信し、該車両の該全地球座標データ、車両走行データ、及びGPS精度指標を生成する。該電子地図データベースは、少なくとも地図情報と複数の道路リンクを含まれる。該表示スクリーンは、車両信号と一つ以上の地図情報を表示する。該制御装置を該電子地図データベース、該ジャイロ装置と該全地球位置把握システム、及び該表示スクリーンに連結する。該制御装置は以下の手順(A)から(H)を実行することにより、該車両信号を該表示スクリーンに表示させる。該手順(A)から手順(H)は、(A)現在位置を選択し、(B)該電子地図データベースより該現在位置に対応する道路とのリンク及び該対応した道路リンクに連結した一つ以上の道路リンクを読み取り、(C)次の車両位置を捉えて、(D)該対応した道路リンクに連結した一つ以上の道路リンクから次の車両位置が第1特定距離の道路リンクを選択し、第1組道路リンクを生成した上、該第1組道路リンクに一つ以上の道路リンクが存在するか否かを判断する。(E)もし、手順(D)により、該第1組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該ジャイロ装置より生成した該車両走行方向角度を次の車両走行方向角度とする。(F)該第1組道路リンクより該次の車両走行方向角度が第1特定角度より小さい道路リンクを選択し、第2組道路リンクを生成した上、該第2組道路リンクに一つ以上の道路リンクが存在するか否かを判断する。(G)もし、手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該次の車両位置と該第2組道路リンクの直線距離を計算した上、該次の車両位置が最短直線距離の道路リンクの投射点を次の修正位置に設定する。(H)該車両の位置信号を該表示スクリーンの次の表示位置に表示する。そのうち、該次の表示位置は該次の修正位置に対応した該表示スクリーンの位置である。
【課題を解決するための手段】
【0006】
請求項1の発明は、ジャイロ装置、表示スクリーン、及び電子地図データベースより構成された車両搭載型ナビゲーションシステムにおいて、該ジャイロ装置より車両走行方向角度を生成し、該電子地図データベースに複数の道路リンクを含まれ、車両の位置信号を該表示スクリーンの表示位置に表示させ、該表示方法は、以下の手順を含まれ、
(A)現在の表示位置を捕捉し、
(B)該電子地図データベースより、現在の表示位置に対応した道路リンク、及び該対応した道路リンクに連結された一つ以上の道路リンクを読み取り、
(C)次の車両位置を捕捉し、
(D)該対応した道路リンクと該連結された一つ以上の道路リンクより、該次の車両位置が第1特定距離を下回る道路リンクを選択した上、第1組道路リンクを生成し、該第1組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、
(E)もし、手順(D)により、該第1組道路リンクに一つ以上の道路リンクの存在が判断されたとき、該ジャイロ装置より生成した車両走行方向角度を次の車両走行方向角度に設定し、
(F)該第1組道路リンクより、該次の車両走行方向角度の差が第1特定角度を下回る道路リンクを選択し、第2組道路リンクを生成した上、該第2組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、
(G)もし手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該次の車両位置と該第2組道路リンクの直線距離を計算した上、該次の車両位置の最短直線距離の道路リンクを選択し、該次の車両位置が最短直線距離の道路リンクの投射点を次の修正位置に設定し、
(H)該車両位置信号を該表示スクリーンの次の表示位置に表示させ、該次の表示位置は該次の修正位置が該表示スクリーンに対応する位置であることを特徴とする修正機能付車両搭載型ナビゲーションシステム及びその表示方法としている。
請求項2の発明は、さらに以下の手順を含まれ、
(G1)もし手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在しないことを判断されたとき、該手順(B)に対応した道路リンク、及び該連結された一つ以上の道路リンクの加重値を計算し、そのうち、該加重値Wは次の車両位置と該道路リンクとの直線距離R、及び該車両走行方向角度と該道路リンクの角度差△θより構成する関数W=f(R,△θ)とし、
(G2)対応した道路リンク、及び連結された一つ以上の道路リンクより次の車両位置の距離が第2特定距離より近い道路リンクを選択した上、第3組道路リンクを生成する、該第2特定距離は該第1特定距離を上回るため、該第3組道路リンクより、次の車両走行方向角度差が第2特定角度を下回る道路リンクを選択した上、第4組道路リンクを生成し、(G3)該第4組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、
(G4)もし手順(G3)により、該第4組道路リンクに一つ以上の道路リンクが存在することを判断したとき、最小加重値の道路を選択し、該次の車両位置は該最小加重値の道路リンクの投射点を次の修正位置に設定し、手順(H)を実行することを特徴とする請求項1に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法としている。
請求項3の発明は、さらに以下の手順を含まれ、
手順(G31)において、もし手順(G3)より該第4組道路リンクに道路リンクが存在しないことを判断されたとき、次の車両位置を次の修正位置に設定し、引き続き手順(H)を実行することを特徴とする請求項1に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法としている。
請求項4の発明は、もし手順(D)により、該第1組道路リンクに一つ以上の道路リンクが存在しないことを判断されたとき、手順(G1)、(G2)、(G3)、及び(G4)を実行することを特徴とする請求項2に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法としている。
請求項5の発明は、手順(G1)の加重値Wは、以下の公式より算出されることを特徴とする請求項2に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【数1】

としている。
請求項6の発明は、該車両搭載型ナビゲーションシステムはさらに、全地球位置把握システム、及び車両速度検出装置を含まれる、該全地球位置把握システムは該車両に取り付けて、複数の衛星信号を受信した上、全地球座標データ、車両速度データ、及びGPS精度指標データを生成し、該車両速度検出装置は車両に取り付けて、該車両の走行速度を検出して、車両速度信号を生成し、該GPS精度指標データの値が該第1特定値を下回るとき、該車両速度検出装置の車両速度信号、及び該ジャイロ装置の車両走行方向角度に基づいて、手順(C)の次の修正位置を算出することを特徴とする請求項1に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法としている。
請求項7の発明は、該全地球位置把握システムはさらに、車両ヘッド角度データを生成し、該GPS精度指標データの値が該第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第1特定速度を上回るとき、該全地球位置把握システムの該車両ヘッド角度データを計算した上、該ジャイロ装置の該車両走行方向角度を修正し、修正角度を生成し、手順(E)において、該ジャイロ装置より生成した該車両走行方向角度に修正角度を加えたものを次の車両走行方向角度に設定することを特徴とする請求項6に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法としている。
請求項8の発明は、該GPS精度指標データの値が第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第2特定速度を上回るとき、該全地球位置把握システムの車両速度データを計算し、該車両速度検出装置より生成した車両速度信号を修正した上、修正車両速度を生成する、該車両第2特定速度は該車両第1特定速度を上回ることを特徴とする請求項7に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法としている。
請求項9の発明は、該ジャイロ装置は該車両に取り付けて、該車両の進行方向を検出し、車両走行方向角度を生成し、
該全地球位置把握システムは該車両に取り付けて、複数の衛星信号を受信し、該車両の現在位置を示すGPS座標データ、車両速度データ、及びGPS精度指標データを生成し、
電子地図データベースを設け、一つ以上の地図情報と複数の道路リンクを含まれ、
表示スクリーンを設け、車両の位置信号と該一つ以上の地図情報を表示し、
制御装置を該電子地図データベース、該ジャイロ装置及び該全地球位置把握システム、該表示スクリーンに連結する、該制御装置は以下の手順(A)から(H)を実行することにより、該車両信号を該表示スクリーンに表示させ、該手順(A)から手順(H)は、(A)現在位置を選択し、(B)該電子地図データベースより該現在位置に対応する道路とのリンク及び該対応した道路リンクに連結した一つ以上の道路リンクを読み取り、(C)次の車両位置を捉えて、(D)該対応した道路リンクに連結した一つ以上の道路リンクから次の車両位置が第1特定距離の道路リンクを選択し、第1組道路リンクを生成した上、該第1組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、(E) もし、手順(D)により、該第1組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該ジャイロ装置より生成した該車両走行方向角度を次の車両走行方向角度とし、(F)該第1組道路リンクより該次の車両走行方向角度が第1特定角度より小さい道路リンクを選択し、第2組道路リンクを生成した上、該第2組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、(G)もし、手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該次の車両位置と該第2組道路リンクの直線距離を計算した上、該次の車両位置が最短直線距離の道路リンクの投射点を次の修正位置に設定し、(H) 該車両の位置信号を該表示スクリーンの次の表示位置に表示し、そのうち、該次の表示位置は該次の修正位置に対応した該表示スクリーンの位置であることを特徴とする修正機能付車両搭載型ナビゲーションシステムとしている。
請求項10の発明は、さらに、車両速度検出装置を該車両に取り付けて、該車両の走行速度を測定し、車両速度信号を生成することを特徴とする請求項9に記載の修正機能付車両搭載型ナビゲーションシステムとしている。
請求項11の発明は、GPS精度指標データの値が該第1特定値を下回るとき、該車両速度検出装置の車両速度信号と該ジャイロ装置の該車両走行方向角度に基づいて、手順(C)における次の車両位置を算出することを特徴とする請求項10に記載の修正機能付車両搭載型ナビゲーションシステムとしている。
請求項12の発明は、該GPS精度指標データの値が該第1特定値の値が該第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第1特定速度を上回るとき、該全地球位置把握システムの該車両ヘッド角度データを計算した上、該ジャイロ装置の該車両走行方向角度を修正し、修正角度を生成し、手順(E)において、該ジャイロ装置より生成した該車両走行方向角度に修正角度を加えたものを次の車両走行方向角度に設定することを特徴とする請求項11に記載の修正機能付車両搭載型ナビゲーションシステムとしている。
請求項13の発明は、該GPS精度指標データの値が第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第2特定速度を上回るとき、該全地球位置把握システムの車両速度データを計算し、該車両速度検出装置より生成した車両速度信号を修正した上、修正車両速度を生成し、該車両第2特定速度は該車両第1特定速度を上回ることを特徴とする請求項12に記載の修正機能付車両搭載型ナビゲーションシステムとしている。
【発明の効果】
【0007】
本発明の修正機能付車両搭載型ナビゲーションシステム及びその表示方法は、車両位置を正確に表示できる。さらに、本発明の修正機能付車両搭載型ナビゲーションシステム及びその表示方法は、全地球位置把握システムの誤差による車両位置表示間違いの問題を解決できる。
【発明を実施するための最良の形態】
【0008】
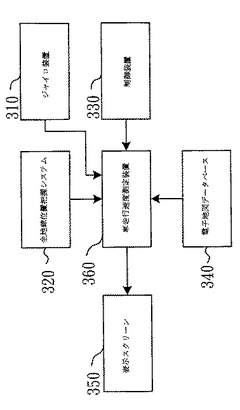
図3に示すものは、本発明の修正機能付車両搭載型ナビゲーションシステムのブロック図である。該車両搭載型ナビゲーションシステムは、ジャイロ装置310、全地球位置把握システム(Global Positioning System, GPS)320、車両走行速度検出装置(velocity measurement)330、電子地図データベース340、表示スクリーン350、及び制御装置360より構成する。
【0009】
該ジャイロ装置310は該車両(図示しない)に取り付けて、該車両の進行方向を検出し、車両走行方向角度を生成する。該全地球位置把握システム(GPS)320は該車両に取り付けて、複数の衛星信号を受信し、該車両の現在位置のGPS座標(GPS coordinates)データ、速度データ(velocity data)、ヘッド角度(head angle) データ、及びGPS精度指標(GPS quality indicator)データを生成する。該車両速度検出装置330は該車両に取り付けて、該車両の走行速度(driving speed)を検出し、速度データ(velocity signal)を生成する。
【0010】
該電子地図データベース340は、少なくとも地図情報と複数の道路リンクを含まれる。それぞれの道路リンク(road link)は、一つ以上の地図情報のうち一つ道路に対応する。すべての道路リンクは、該道路リンクに連結した一つ以上の道路リンクに記録する。該表示スクリーン350は、車両の位置信号と該一つ以上の地図情報を表示する。該制御装置360は、該電子地図データベース340、該ジャイロ装置310、該車両速度検出装置330、該全地球位置把握システム320、及び該表示スクリーン350に連結する。該制御装置360は該全地球位置把握システム320より出力されたデータの受信により、該ジャイロ装置310の車両走行方向角度と該車両速度検出装置330の車両速度信号を修正する。該制御装置360は、車両の位置信号を該表示スクリーン350の表示位置に表示させる。
【0011】
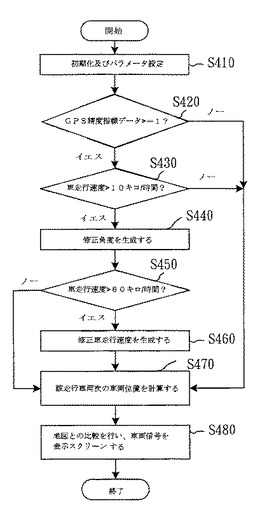
図4に示すものは、本発明の車両搭載型ナビゲーションシステムの表示方法のフロー図である。手順S410にて、初期化を実行する。該制御装置360により、該ジャイロ装置310、該全地球位置把握システム320、該車両速度検出装置330、及び該表示スクリーン350の初期化を行い、一連の稼働パラメータを設定する。一方、該制御装置360は該ジャイロ装置310より生成した車両走行方向と該車両速度検出装置330の車両速度信号に基づいて、現在の表示位置を算出する。
【0012】
手順S420において、該GPS精度指標(GPS quality indicator)データは1より大きい、または等しいかを判断する。そのうち、該GPS精度指標が1より大きいまたは等しいとき、該全地球位置把握システム(GPS)320が受信した信号の品質が良好であることを示す。
【0013】
もし、手順S420により、該GPS精度指標の指示欄が1より大きいまたは等しいことを判断したとき、手順S430にて、該全地球位置把握システム320により、該車両速度データに基づいて、該車両速度は10キロ/時間(第1特定速度)を超えているか否かを判断する。もし、手順S430により、該車両速度は10キロ/時間を超えていたことが判断されたとき、該全地球位置把握システム320の該車両ヘッド角度データを用いて、該ジャイロ装置310の該車両走行方向角度を修正する(手順S440)。手順S440において、該全地球位置把握システム320の車両ヘッド角度データを計算した上、該ジャイロ装置310より生成した車両走行方向角度を修正し、修正角度を生成する。
【0014】
手順S450において、該車両速度は60キロ/時間(第2特定速度)を超えているか否かを判断する。もし、手順S450より、該車両速度は60キロ/時間を超えていると判断されたとき、該全地球位置把握システム320の該車両速度データを計算した上、車両速度検出装置330より生成した車両速度信号を修正し、修正の車両速度を生成する(手順S460)。
【0015】
手順S470において、該GPS精度指標指示欄の値が1を下回るとき、該制御装置360は該車両速度検出装置330の該車両速度信号と該ジャイロ装置310の該車両走行方向角度に基づいて、該車両の次の位置を算出する。該GPS精度指標指示欄の値が1より大きいまたは等しい、かつ、該車両速度は10キロ/時間を超えるとき、該制御装置360は該車両速度検出装置330の車両速度信号と該修正角度に基づいて、該車両の次の位置を算出する。該GPS精度指標指示欄の値が1より大きいまたは等しい、かつ、該車両速度は60キロ/時間を超えるとき、該制御装置360は該修正車両速度と該修正角度に基づいて、該車両の次の位置を算出する。手順S480は本発明の修正表示の方法を示す。手順S480において、該車両の次の位置を該電子地図データベースの地図と比較した上、車両の位置信号を該表示スクリーンの次の表示位置に表示させる。
【0016】
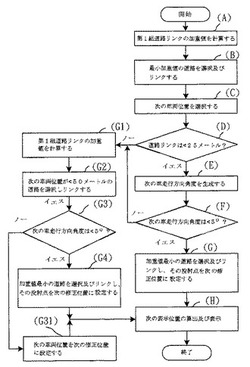
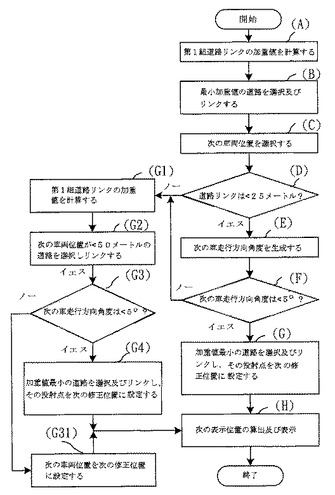
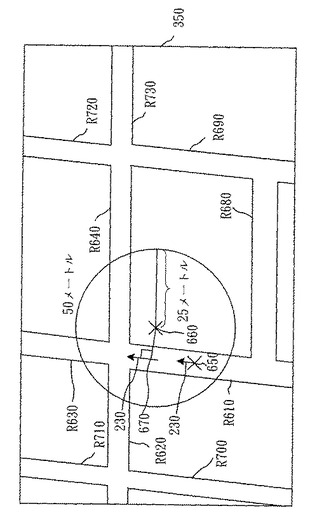
図5は本発明の手順S480のフロー図である。手順(A)において、該制御装置360より現在の表示位置を捕捉する。該現在の表示位置は、該車両の位置信号を該表示スクリーン350に表示する位置である。手順(B)において、該制御装置360は該電子地図データベース340より該現在の表示位置に対応した道路リンク(road link)、及び該対応した道路リンクに連結された一つ以上の道路リンクを読み取る。図6に示すとおり、該現在の表示位置は650に表示し、該現在の表示位置650に対応した道路リンクはR610である。該制御装置360より道路リンクR610、及び該対応した道路リンクR610に連結された一つ以上の道路リンク(R620、R630、R640、及R680)を読み取る。
【0017】
手順(C)において、該制御装置360より次の車両位置を捕捉する。図4のフローにおいて、該GPS精度指標指示欄の値が1を下回るとき、該制御装置360は該車両速度検出装置330の該車両速度信号と該ジャイロ装置310の該車両走行方向角度に基づいて、該車両の次の位置を算出する。該GPS精度指標指示欄の値が1より大きいまたは等しい、かつ、該車両速度は10キロ/時間を超えるとき、該制御装置360は該車両速度検出装置30の車両速度信号と該修正角度に基づいて、該車両の次の位置を算出する。該GPS精度指標指示欄の値が1より大きいまたは等しい、かつ、該車両速度は60キロ/時間を超えるとき、該制御装置360は該修正車両速度と該修正角度に基づいて、該車両の次の位置を算出する。なお、該次の車両位置は後の計算に備える参考値であるため、該表示スクリーン350に表示されない。説明の便宜上、該次の車両位置を図6の660に表示する。
【0018】
手順(D)において、該道路リンクR610、及び該道路リンクR610に対応し連結された一つ以上の道路リンク(R620、R630、R640、及びR680)より、該次の車両位置660との距離が25メートル(第1特定距離)を下回る道路リンクを選択した上、第1組道路リンクを生成し、該第1組道路リンクに一つ以上の道路リンクが存在するか否かを判断する。図6に示すとおり、該道路リンクR610、R620、R630、及びR640とも該次の車両位置660との距離は25メートルを下回るため、該第1組道路リンクは道路リンクR610、R620、R630、及びR640を含まれる。道路リンクR680と該次の車両位置660との距離が25メートルを上回るため、該第1組道路リンクに含まれない。
【0019】
手順(E)において、もし、手順(D)により、該第1組道路リンクに一つ以上の道路リンクの存在が判断されたとき、該ジャイロ装置310より生成した車両走行方向角度を次の車両走行方向角度に設定する。その他の実施例において、特定時間範囲内該ジャイロ装置310より生成した車両走行方向角度の平均値を次の車両走行方向角度に設定するか、または、第1組道路リンク(道路リンクR610、R620、R630、及びR640)から該ジャイロ装置310より生成した該車両走行方向角度の平均値の差が最も少ない道路リンクを選択し、該方向差の最も少ない道路リンクの方向を次の車両走行方向角度に設定しても良い。
【0020】
手順(F)において、該第1組道路リンクより、該次の車両走行方向角度の差が5o(第1特定角度)を下回る道路リンクを選択し、第2組道路リンクを生成した上、該第2組道路リンクに一つ以上の道路リンクが存在するか否かを判断する。第2組道路リンクのうち、道路リンクR610及びR630と該次の車両走行方向角度の差が5 oを下回り、かつ、道路リンクR620及びR640と該次の車両走行方向角度の差が5 oを上回るため、第2組道路リンクに道路リンクR610及R630を含まれる。
【0021】
手順(G)において、もし手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該次の車両位置660と該第2組道路リンクの道路リンク(道路リンクR610及びR630)の直線距離を計算し、該次の車両位置660の最短の直線距離の道路リンク(道路リンクR610)を選択した上、該次の車両位置660が該最短の直線距離の道路リンク(道路リンクR610)の投射点を次の修正位置に設定する。
【0022】
手順(H)において、該車両位置信号を該表示スクリーン350の次の表示位置670に表示させる。該次の表示位置670は該次の修正位置が該表示スクリーン350に対応する位置である。
【0023】
もし、手順(D)により、該第2組道路リンクに一つ以上の道路リンクが存在しないことを判断されたとき、手順(G1)を実行する。もし、手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在しないことを判断されたときも手順(G1)を実行する。
【0024】
手順(G1)において、該手順(D)に対応した道路リンクと該連結された一つ以上の道路リンクの加重値を計算する。すなわち、該第2組道路リンクの道路リンクR610、R620、R630、R640、及びR680の加重値を計算する。該加重値Wは、以下の公式により算出される。
【数2】
【0025】
そのうち、Wは加重値、Rは次の車両位置660と該道路リンクとの直線距離、(閘は該ジャイロ装置310より生成した車両走行方向角度と該道路リンクとの角度差の値である。
【0026】
手順(G2)において、該対応した道路データベース構成において、該道路リンク(R610、R620、R630、R640、及びR680)より、該次の車両位置660との距離が50メートル(第2特定距離)を下回る道路リンクを選択した上、第3組道路リンクを生成し、該第2特定距離は該第1特定距離より大きく設ける。これは、次の車両位置660と25メートル距離以内に道路リンクが存在ない、または該次の車両位置660と25メートル距離以内に道路リンクが存在するが、該道路リンクと該次の車両走行方向角度との差が5oを上回ることを示す。よって、このときは該次の車両位置660を中心点とし、道路リンクの検索範囲を拡大する。
【0027】
手順(G3)において、該第3組道路リンクより、該次の車両走行方向角度の角度差が第2特定角度(5o)を下回る道路リンクを選択し、第4組道路リンクを生成し、該第4組道路リンクに一つ以上の道路リンクが存在するか否かを判断する。
【0028】
手順(G4)において、もし手順(G3)により、該第4組道路リンクに一つ以上の道路リンクが存在することを判断したとき、最小加重値の道路を選択し、該次の車両位置は該最小加重値の道路リンクの投射点を次の修正位置に設定し、手順(H)を実行する。
【0029】
手順(G31)において、もし手順(G3)により、該第4組道路リンクに道路リンクが存在しないことを判断したとき、該車両は電子地図データベース340に保存されていない道路(新規道路)に走行していることを示す。該制御装置360より、該次の車両位置を次の修正位置に設定し、手順(H)を実行する。
【0030】
前記した説明のとおり、本発明は全地球位置把握システムの誤差により、該車両の位置信号230を道路220からはずれて表示される問題を克服できる。その上、該全地球位置把握システム320のGPS精度指標データが1より大きいまたは等しいとき、該ジャイロ装置310と該車両速度検出装置330の出力値を修正し、該ジャイロ装置310は地球の自転による誤差を防止し、車両の位置信号を正しく表示できる。該全地球位置把握システム320の該GPS精度指標データが1を下回るとき、該車両速度検出装置330の該車両速度信号、及び該ジャイロ装置310の該車両走行方向角度に基づいて、該車両次の位置を計算し、該全地球位置把握システム320の誤差または信号品質低下により、該車両位置信号230を間違った位置に表示されることを防止し、車両の位置信号を正しく表示できる。
【図面の簡単な説明】
【0031】
【図1】公知技術の車両搭載型ナビゲーションシステムを搭載した車両の概略図である。
【図2】公知技術の車両搭載型ナビゲーションシステムより生成したエラーメッセージの概略図である。
【図3】本発明の車両搭載型ナビゲーションシステムのブロック図である。
【図4】本発明の車両搭載型ナビゲーションシステムの表示方法のフロー図である。
【図5】本発明の表示修正方法のフロー図である。
【図6】本発明の車両搭載型ナビゲーションシステムの稼働概略図である。
【符号の説明】
【0032】
81 全地球位置把握システム
82 ナビゲーションシステム
9 地球投影位置決定衛星
821 マイクロプロセッサー
822 電子地図データベース
83 表示装置
220 道路
230 車両の位置信号
310 ジャイロ装置
320 全地球位置把握システム
330 車走行速度測定装置
340 電子地図データベース
350 表示スクリーン
360 制御装置
R610、R620、R630、R640、R680,R690 道路リンク
R710、R720、R730、R740 道路リンク
650 現時点の表示位置
660 次の表示位置
670 次の車両位置
【技術分野】
【0001】
本発明は一種車両搭載型ナビゲーションシステム及びその表示方法、特に一種の表示装置に修正後の車両信号位置を表示可能な修正機能付車両搭載型ナビゲーションシステム及びその表示方法に関わるものである。
【背景技術】
【0002】
図1に示すものは、車内に全地球位置把握システム(Global Positioning System, GPS)81とナビゲーションシステム82を設けた、従来のナビゲーションシステム(Navigation) 機能付の車両である。公知技術の全地球位置把握システム81は、つねに大気圏外に打ち上げた複数の地球投影位置決定衛星9の信号を受信し、車両その時点の車両座標を随時に演算する。ナビゲーションシステム82のマイクロプロセッサー821により、内蔵の電子地図データベース822との比較を行い、その時点における車両の電子地図データベース822における地図データベースの対応位置を算出した上、その車両の位置信号を該表示装置83に表示させ、車両の位置を操縦者に知らせる。
【0003】
しかしながら、全地球位置把握システム81は精度の原因により、図2の状況がしばしば発生する。図2に示すものは、公知技術の車両搭載型ナビゲーションシステムより生成したエラーメッセージの概略図である。図2に示すとおり、操縦者が車両を道路220上の運転において、正常のときは該車両の位置信号230は画面上の道路220にて、円形Aを表示する。しかしながら、全地球位置把握システム81の精度誤差により、該マイクロプロセッサー821は誤差あったその時点における車両の座標を内蔵の電子地図データベース822と比較した上、該マイクロプロセッサー821より該車両の位置信号230を円形Bにて、道路220からはずれて表示される。このような間違い表示により、操縦者は道路状況に戸惑い、車両搭載型ナビゲーションシステムに対する信頼感を低下してしまう。また、車両がトンネル内で走行するとき、複数の地球投影位置決定衛星9の信号を受けられないため、その時点で算出された車両座標は正確ではない。該マイクロプロセッサー821はその時点の不正確な車両座標を内蔵の電子地図データベース822との比較を行い、該マイクロプロセッサー821より該車両の位置信号230を間違った場所に表示される。よって、公知技術の車両搭載型ナビゲーションシステムは、改善の必要がある。
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の修正機能付車両搭載型ナビゲーションシステム及びその表示方法は、以下の構成要素を備える。ジャイロ装置、表示スクリーン、及び電子地図データベースを設け、該ジャイロ装置より車両走行方向角度を生成し、該電子地図データベースは複数の道路リンクを内蔵する。該表示方法は車両の位置信号を該表示スクリーンの表示位置に表示する。そのうち、該表示方法は以下の手順を含まれる。(A)現時点の表示位置を捉えて、(B)該電子地図データベースより現時点の表示位置に対応する道路とのリンク及びを読み取り、該道路リンクとリンクした一つ以上の道路にリンクする。(C)次の車両位置を捕捉し、(D)該対応の道路リンク及び該一つ以上の道路リンクから、次の車両位置の第1特定距離より少ない道路リンクを選択し、第1組道路リンクを生成して、該第1組道路リンクに一つ以上の道路リンクが存在するか否かを判断する。(E)手順(D)により、該第1組道路リンクに一つ以上の道路リンクの存在を判断したとき、該ジャイロ装置より生成した車両走行方向角度を次の車両走行方向角度に設定する。(F)該第1組道路リンクより、次の車両走行方向角度が第1特定角度より小さい道路リンクを選択し、第2組の道路リンクを生成して、該第2組の道路リンクに一つ以上の道路リンクが存在するか否かを判断する。(G)手順(F)により、該第2組の道路リンクに一つ以上の道路リンクが判断されたとき、該次の車両位置と該第2組の道路リンクの直線距離を算出し、該次の車両位置の最短直線距離の道路リンクを選択し、該次の車両位置が該最短直線距離の道路リンクの投射点を次の修正位置に設定する。(H)該車両の位置信号を該表示スクリーンの次の表示位置に表示する。そのうち、該次の表示位置は該次の修正位置に対応した該表示スクリーンの位置である。
【0005】
本発明の修正機能付車両搭載型ナビゲーションシステムは、ジャイロ装置、全地球位置把握システム、電子地図データベース、表示スクリーン及び制御装置より構成する。該ジャイロ装置は該車両に取り付けて、該車両の進行方向を検出し、車両走行方向角度を生成する。該全地球位置把握システムを該車両に取り付け、複数の衛星信号を受信し、該車両の該全地球座標データ、車両走行データ、及びGPS精度指標を生成する。該電子地図データベースは、少なくとも地図情報と複数の道路リンクを含まれる。該表示スクリーンは、車両信号と一つ以上の地図情報を表示する。該制御装置を該電子地図データベース、該ジャイロ装置と該全地球位置把握システム、及び該表示スクリーンに連結する。該制御装置は以下の手順(A)から(H)を実行することにより、該車両信号を該表示スクリーンに表示させる。該手順(A)から手順(H)は、(A)現在位置を選択し、(B)該電子地図データベースより該現在位置に対応する道路とのリンク及び該対応した道路リンクに連結した一つ以上の道路リンクを読み取り、(C)次の車両位置を捉えて、(D)該対応した道路リンクに連結した一つ以上の道路リンクから次の車両位置が第1特定距離の道路リンクを選択し、第1組道路リンクを生成した上、該第1組道路リンクに一つ以上の道路リンクが存在するか否かを判断する。(E)もし、手順(D)により、該第1組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該ジャイロ装置より生成した該車両走行方向角度を次の車両走行方向角度とする。(F)該第1組道路リンクより該次の車両走行方向角度が第1特定角度より小さい道路リンクを選択し、第2組道路リンクを生成した上、該第2組道路リンクに一つ以上の道路リンクが存在するか否かを判断する。(G)もし、手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該次の車両位置と該第2組道路リンクの直線距離を計算した上、該次の車両位置が最短直線距離の道路リンクの投射点を次の修正位置に設定する。(H)該車両の位置信号を該表示スクリーンの次の表示位置に表示する。そのうち、該次の表示位置は該次の修正位置に対応した該表示スクリーンの位置である。
【課題を解決するための手段】
【0006】
請求項1の発明は、ジャイロ装置、表示スクリーン、及び電子地図データベースより構成された車両搭載型ナビゲーションシステムにおいて、該ジャイロ装置より車両走行方向角度を生成し、該電子地図データベースに複数の道路リンクを含まれ、車両の位置信号を該表示スクリーンの表示位置に表示させ、該表示方法は、以下の手順を含まれ、
(A)現在の表示位置を捕捉し、
(B)該電子地図データベースより、現在の表示位置に対応した道路リンク、及び該対応した道路リンクに連結された一つ以上の道路リンクを読み取り、
(C)次の車両位置を捕捉し、
(D)該対応した道路リンクと該連結された一つ以上の道路リンクより、該次の車両位置が第1特定距離を下回る道路リンクを選択した上、第1組道路リンクを生成し、該第1組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、
(E)もし、手順(D)により、該第1組道路リンクに一つ以上の道路リンクの存在が判断されたとき、該ジャイロ装置より生成した車両走行方向角度を次の車両走行方向角度に設定し、
(F)該第1組道路リンクより、該次の車両走行方向角度の差が第1特定角度を下回る道路リンクを選択し、第2組道路リンクを生成した上、該第2組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、
(G)もし手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該次の車両位置と該第2組道路リンクの直線距離を計算した上、該次の車両位置の最短直線距離の道路リンクを選択し、該次の車両位置が最短直線距離の道路リンクの投射点を次の修正位置に設定し、
(H)該車両位置信号を該表示スクリーンの次の表示位置に表示させ、該次の表示位置は該次の修正位置が該表示スクリーンに対応する位置であることを特徴とする修正機能付車両搭載型ナビゲーションシステム及びその表示方法としている。
請求項2の発明は、さらに以下の手順を含まれ、
(G1)もし手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在しないことを判断されたとき、該手順(B)に対応した道路リンク、及び該連結された一つ以上の道路リンクの加重値を計算し、そのうち、該加重値Wは次の車両位置と該道路リンクとの直線距離R、及び該車両走行方向角度と該道路リンクの角度差△θより構成する関数W=f(R,△θ)とし、
(G2)対応した道路リンク、及び連結された一つ以上の道路リンクより次の車両位置の距離が第2特定距離より近い道路リンクを選択した上、第3組道路リンクを生成する、該第2特定距離は該第1特定距離を上回るため、該第3組道路リンクより、次の車両走行方向角度差が第2特定角度を下回る道路リンクを選択した上、第4組道路リンクを生成し、(G3)該第4組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、
(G4)もし手順(G3)により、該第4組道路リンクに一つ以上の道路リンクが存在することを判断したとき、最小加重値の道路を選択し、該次の車両位置は該最小加重値の道路リンクの投射点を次の修正位置に設定し、手順(H)を実行することを特徴とする請求項1に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法としている。
請求項3の発明は、さらに以下の手順を含まれ、
手順(G31)において、もし手順(G3)より該第4組道路リンクに道路リンクが存在しないことを判断されたとき、次の車両位置を次の修正位置に設定し、引き続き手順(H)を実行することを特徴とする請求項1に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法としている。
請求項4の発明は、もし手順(D)により、該第1組道路リンクに一つ以上の道路リンクが存在しないことを判断されたとき、手順(G1)、(G2)、(G3)、及び(G4)を実行することを特徴とする請求項2に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法としている。
請求項5の発明は、手順(G1)の加重値Wは、以下の公式より算出されることを特徴とする請求項2に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【数1】
としている。
請求項6の発明は、該車両搭載型ナビゲーションシステムはさらに、全地球位置把握システム、及び車両速度検出装置を含まれる、該全地球位置把握システムは該車両に取り付けて、複数の衛星信号を受信した上、全地球座標データ、車両速度データ、及びGPS精度指標データを生成し、該車両速度検出装置は車両に取り付けて、該車両の走行速度を検出して、車両速度信号を生成し、該GPS精度指標データの値が該第1特定値を下回るとき、該車両速度検出装置の車両速度信号、及び該ジャイロ装置の車両走行方向角度に基づいて、手順(C)の次の修正位置を算出することを特徴とする請求項1に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法としている。
請求項7の発明は、該全地球位置把握システムはさらに、車両ヘッド角度データを生成し、該GPS精度指標データの値が該第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第1特定速度を上回るとき、該全地球位置把握システムの該車両ヘッド角度データを計算した上、該ジャイロ装置の該車両走行方向角度を修正し、修正角度を生成し、手順(E)において、該ジャイロ装置より生成した該車両走行方向角度に修正角度を加えたものを次の車両走行方向角度に設定することを特徴とする請求項6に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法としている。
請求項8の発明は、該GPS精度指標データの値が第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第2特定速度を上回るとき、該全地球位置把握システムの車両速度データを計算し、該車両速度検出装置より生成した車両速度信号を修正した上、修正車両速度を生成する、該車両第2特定速度は該車両第1特定速度を上回ることを特徴とする請求項7に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法としている。
請求項9の発明は、該ジャイロ装置は該車両に取り付けて、該車両の進行方向を検出し、車両走行方向角度を生成し、
該全地球位置把握システムは該車両に取り付けて、複数の衛星信号を受信し、該車両の現在位置を示すGPS座標データ、車両速度データ、及びGPS精度指標データを生成し、
電子地図データベースを設け、一つ以上の地図情報と複数の道路リンクを含まれ、
表示スクリーンを設け、車両の位置信号と該一つ以上の地図情報を表示し、
制御装置を該電子地図データベース、該ジャイロ装置及び該全地球位置把握システム、該表示スクリーンに連結する、該制御装置は以下の手順(A)から(H)を実行することにより、該車両信号を該表示スクリーンに表示させ、該手順(A)から手順(H)は、(A)現在位置を選択し、(B)該電子地図データベースより該現在位置に対応する道路とのリンク及び該対応した道路リンクに連結した一つ以上の道路リンクを読み取り、(C)次の車両位置を捉えて、(D)該対応した道路リンクに連結した一つ以上の道路リンクから次の車両位置が第1特定距離の道路リンクを選択し、第1組道路リンクを生成した上、該第1組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、(E) もし、手順(D)により、該第1組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該ジャイロ装置より生成した該車両走行方向角度を次の車両走行方向角度とし、(F)該第1組道路リンクより該次の車両走行方向角度が第1特定角度より小さい道路リンクを選択し、第2組道路リンクを生成した上、該第2組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、(G)もし、手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該次の車両位置と該第2組道路リンクの直線距離を計算した上、該次の車両位置が最短直線距離の道路リンクの投射点を次の修正位置に設定し、(H) 該車両の位置信号を該表示スクリーンの次の表示位置に表示し、そのうち、該次の表示位置は該次の修正位置に対応した該表示スクリーンの位置であることを特徴とする修正機能付車両搭載型ナビゲーションシステムとしている。
請求項10の発明は、さらに、車両速度検出装置を該車両に取り付けて、該車両の走行速度を測定し、車両速度信号を生成することを特徴とする請求項9に記載の修正機能付車両搭載型ナビゲーションシステムとしている。
請求項11の発明は、GPS精度指標データの値が該第1特定値を下回るとき、該車両速度検出装置の車両速度信号と該ジャイロ装置の該車両走行方向角度に基づいて、手順(C)における次の車両位置を算出することを特徴とする請求項10に記載の修正機能付車両搭載型ナビゲーションシステムとしている。
請求項12の発明は、該GPS精度指標データの値が該第1特定値の値が該第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第1特定速度を上回るとき、該全地球位置把握システムの該車両ヘッド角度データを計算した上、該ジャイロ装置の該車両走行方向角度を修正し、修正角度を生成し、手順(E)において、該ジャイロ装置より生成した該車両走行方向角度に修正角度を加えたものを次の車両走行方向角度に設定することを特徴とする請求項11に記載の修正機能付車両搭載型ナビゲーションシステムとしている。
請求項13の発明は、該GPS精度指標データの値が第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第2特定速度を上回るとき、該全地球位置把握システムの車両速度データを計算し、該車両速度検出装置より生成した車両速度信号を修正した上、修正車両速度を生成し、該車両第2特定速度は該車両第1特定速度を上回ることを特徴とする請求項12に記載の修正機能付車両搭載型ナビゲーションシステムとしている。
【発明の効果】
【0007】
本発明の修正機能付車両搭載型ナビゲーションシステム及びその表示方法は、車両位置を正確に表示できる。さらに、本発明の修正機能付車両搭載型ナビゲーションシステム及びその表示方法は、全地球位置把握システムの誤差による車両位置表示間違いの問題を解決できる。
【発明を実施するための最良の形態】
【0008】
図3に示すものは、本発明の修正機能付車両搭載型ナビゲーションシステムのブロック図である。該車両搭載型ナビゲーションシステムは、ジャイロ装置310、全地球位置把握システム(Global Positioning System, GPS)320、車両走行速度検出装置(velocity measurement)330、電子地図データベース340、表示スクリーン350、及び制御装置360より構成する。
【0009】
該ジャイロ装置310は該車両(図示しない)に取り付けて、該車両の進行方向を検出し、車両走行方向角度を生成する。該全地球位置把握システム(GPS)320は該車両に取り付けて、複数の衛星信号を受信し、該車両の現在位置のGPS座標(GPS coordinates)データ、速度データ(velocity data)、ヘッド角度(head angle) データ、及びGPS精度指標(GPS quality indicator)データを生成する。該車両速度検出装置330は該車両に取り付けて、該車両の走行速度(driving speed)を検出し、速度データ(velocity signal)を生成する。
【0010】
該電子地図データベース340は、少なくとも地図情報と複数の道路リンクを含まれる。それぞれの道路リンク(road link)は、一つ以上の地図情報のうち一つ道路に対応する。すべての道路リンクは、該道路リンクに連結した一つ以上の道路リンクに記録する。該表示スクリーン350は、車両の位置信号と該一つ以上の地図情報を表示する。該制御装置360は、該電子地図データベース340、該ジャイロ装置310、該車両速度検出装置330、該全地球位置把握システム320、及び該表示スクリーン350に連結する。該制御装置360は該全地球位置把握システム320より出力されたデータの受信により、該ジャイロ装置310の車両走行方向角度と該車両速度検出装置330の車両速度信号を修正する。該制御装置360は、車両の位置信号を該表示スクリーン350の表示位置に表示させる。
【0011】
図4に示すものは、本発明の車両搭載型ナビゲーションシステムの表示方法のフロー図である。手順S410にて、初期化を実行する。該制御装置360により、該ジャイロ装置310、該全地球位置把握システム320、該車両速度検出装置330、及び該表示スクリーン350の初期化を行い、一連の稼働パラメータを設定する。一方、該制御装置360は該ジャイロ装置310より生成した車両走行方向と該車両速度検出装置330の車両速度信号に基づいて、現在の表示位置を算出する。
【0012】
手順S420において、該GPS精度指標(GPS quality indicator)データは1より大きい、または等しいかを判断する。そのうち、該GPS精度指標が1より大きいまたは等しいとき、該全地球位置把握システム(GPS)320が受信した信号の品質が良好であることを示す。
【0013】
もし、手順S420により、該GPS精度指標の指示欄が1より大きいまたは等しいことを判断したとき、手順S430にて、該全地球位置把握システム320により、該車両速度データに基づいて、該車両速度は10キロ/時間(第1特定速度)を超えているか否かを判断する。もし、手順S430により、該車両速度は10キロ/時間を超えていたことが判断されたとき、該全地球位置把握システム320の該車両ヘッド角度データを用いて、該ジャイロ装置310の該車両走行方向角度を修正する(手順S440)。手順S440において、該全地球位置把握システム320の車両ヘッド角度データを計算した上、該ジャイロ装置310より生成した車両走行方向角度を修正し、修正角度を生成する。
【0014】
手順S450において、該車両速度は60キロ/時間(第2特定速度)を超えているか否かを判断する。もし、手順S450より、該車両速度は60キロ/時間を超えていると判断されたとき、該全地球位置把握システム320の該車両速度データを計算した上、車両速度検出装置330より生成した車両速度信号を修正し、修正の車両速度を生成する(手順S460)。
【0015】
手順S470において、該GPS精度指標指示欄の値が1を下回るとき、該制御装置360は該車両速度検出装置330の該車両速度信号と該ジャイロ装置310の該車両走行方向角度に基づいて、該車両の次の位置を算出する。該GPS精度指標指示欄の値が1より大きいまたは等しい、かつ、該車両速度は10キロ/時間を超えるとき、該制御装置360は該車両速度検出装置330の車両速度信号と該修正角度に基づいて、該車両の次の位置を算出する。該GPS精度指標指示欄の値が1より大きいまたは等しい、かつ、該車両速度は60キロ/時間を超えるとき、該制御装置360は該修正車両速度と該修正角度に基づいて、該車両の次の位置を算出する。手順S480は本発明の修正表示の方法を示す。手順S480において、該車両の次の位置を該電子地図データベースの地図と比較した上、車両の位置信号を該表示スクリーンの次の表示位置に表示させる。
【0016】
図5は本発明の手順S480のフロー図である。手順(A)において、該制御装置360より現在の表示位置を捕捉する。該現在の表示位置は、該車両の位置信号を該表示スクリーン350に表示する位置である。手順(B)において、該制御装置360は該電子地図データベース340より該現在の表示位置に対応した道路リンク(road link)、及び該対応した道路リンクに連結された一つ以上の道路リンクを読み取る。図6に示すとおり、該現在の表示位置は650に表示し、該現在の表示位置650に対応した道路リンクはR610である。該制御装置360より道路リンクR610、及び該対応した道路リンクR610に連結された一つ以上の道路リンク(R620、R630、R640、及R680)を読み取る。
【0017】
手順(C)において、該制御装置360より次の車両位置を捕捉する。図4のフローにおいて、該GPS精度指標指示欄の値が1を下回るとき、該制御装置360は該車両速度検出装置330の該車両速度信号と該ジャイロ装置310の該車両走行方向角度に基づいて、該車両の次の位置を算出する。該GPS精度指標指示欄の値が1より大きいまたは等しい、かつ、該車両速度は10キロ/時間を超えるとき、該制御装置360は該車両速度検出装置30の車両速度信号と該修正角度に基づいて、該車両の次の位置を算出する。該GPS精度指標指示欄の値が1より大きいまたは等しい、かつ、該車両速度は60キロ/時間を超えるとき、該制御装置360は該修正車両速度と該修正角度に基づいて、該車両の次の位置を算出する。なお、該次の車両位置は後の計算に備える参考値であるため、該表示スクリーン350に表示されない。説明の便宜上、該次の車両位置を図6の660に表示する。
【0018】
手順(D)において、該道路リンクR610、及び該道路リンクR610に対応し連結された一つ以上の道路リンク(R620、R630、R640、及びR680)より、該次の車両位置660との距離が25メートル(第1特定距離)を下回る道路リンクを選択した上、第1組道路リンクを生成し、該第1組道路リンクに一つ以上の道路リンクが存在するか否かを判断する。図6に示すとおり、該道路リンクR610、R620、R630、及びR640とも該次の車両位置660との距離は25メートルを下回るため、該第1組道路リンクは道路リンクR610、R620、R630、及びR640を含まれる。道路リンクR680と該次の車両位置660との距離が25メートルを上回るため、該第1組道路リンクに含まれない。
【0019】
手順(E)において、もし、手順(D)により、該第1組道路リンクに一つ以上の道路リンクの存在が判断されたとき、該ジャイロ装置310より生成した車両走行方向角度を次の車両走行方向角度に設定する。その他の実施例において、特定時間範囲内該ジャイロ装置310より生成した車両走行方向角度の平均値を次の車両走行方向角度に設定するか、または、第1組道路リンク(道路リンクR610、R620、R630、及びR640)から該ジャイロ装置310より生成した該車両走行方向角度の平均値の差が最も少ない道路リンクを選択し、該方向差の最も少ない道路リンクの方向を次の車両走行方向角度に設定しても良い。
【0020】
手順(F)において、該第1組道路リンクより、該次の車両走行方向角度の差が5o(第1特定角度)を下回る道路リンクを選択し、第2組道路リンクを生成した上、該第2組道路リンクに一つ以上の道路リンクが存在するか否かを判断する。第2組道路リンクのうち、道路リンクR610及びR630と該次の車両走行方向角度の差が5 oを下回り、かつ、道路リンクR620及びR640と該次の車両走行方向角度の差が5 oを上回るため、第2組道路リンクに道路リンクR610及R630を含まれる。
【0021】
手順(G)において、もし手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該次の車両位置660と該第2組道路リンクの道路リンク(道路リンクR610及びR630)の直線距離を計算し、該次の車両位置660の最短の直線距離の道路リンク(道路リンクR610)を選択した上、該次の車両位置660が該最短の直線距離の道路リンク(道路リンクR610)の投射点を次の修正位置に設定する。
【0022】
手順(H)において、該車両位置信号を該表示スクリーン350の次の表示位置670に表示させる。該次の表示位置670は該次の修正位置が該表示スクリーン350に対応する位置である。
【0023】
もし、手順(D)により、該第2組道路リンクに一つ以上の道路リンクが存在しないことを判断されたとき、手順(G1)を実行する。もし、手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在しないことを判断されたときも手順(G1)を実行する。
【0024】
手順(G1)において、該手順(D)に対応した道路リンクと該連結された一つ以上の道路リンクの加重値を計算する。すなわち、該第2組道路リンクの道路リンクR610、R620、R630、R640、及びR680の加重値を計算する。該加重値Wは、以下の公式により算出される。
【数2】
【0025】
そのうち、Wは加重値、Rは次の車両位置660と該道路リンクとの直線距離、(閘は該ジャイロ装置310より生成した車両走行方向角度と該道路リンクとの角度差の値である。
【0026】
手順(G2)において、該対応した道路データベース構成において、該道路リンク(R610、R620、R630、R640、及びR680)より、該次の車両位置660との距離が50メートル(第2特定距離)を下回る道路リンクを選択した上、第3組道路リンクを生成し、該第2特定距離は該第1特定距離より大きく設ける。これは、次の車両位置660と25メートル距離以内に道路リンクが存在ない、または該次の車両位置660と25メートル距離以内に道路リンクが存在するが、該道路リンクと該次の車両走行方向角度との差が5oを上回ることを示す。よって、このときは該次の車両位置660を中心点とし、道路リンクの検索範囲を拡大する。
【0027】
手順(G3)において、該第3組道路リンクより、該次の車両走行方向角度の角度差が第2特定角度(5o)を下回る道路リンクを選択し、第4組道路リンクを生成し、該第4組道路リンクに一つ以上の道路リンクが存在するか否かを判断する。
【0028】
手順(G4)において、もし手順(G3)により、該第4組道路リンクに一つ以上の道路リンクが存在することを判断したとき、最小加重値の道路を選択し、該次の車両位置は該最小加重値の道路リンクの投射点を次の修正位置に設定し、手順(H)を実行する。
【0029】
手順(G31)において、もし手順(G3)により、該第4組道路リンクに道路リンクが存在しないことを判断したとき、該車両は電子地図データベース340に保存されていない道路(新規道路)に走行していることを示す。該制御装置360より、該次の車両位置を次の修正位置に設定し、手順(H)を実行する。
【0030】
前記した説明のとおり、本発明は全地球位置把握システムの誤差により、該車両の位置信号230を道路220からはずれて表示される問題を克服できる。その上、該全地球位置把握システム320のGPS精度指標データが1より大きいまたは等しいとき、該ジャイロ装置310と該車両速度検出装置330の出力値を修正し、該ジャイロ装置310は地球の自転による誤差を防止し、車両の位置信号を正しく表示できる。該全地球位置把握システム320の該GPS精度指標データが1を下回るとき、該車両速度検出装置330の該車両速度信号、及び該ジャイロ装置310の該車両走行方向角度に基づいて、該車両次の位置を計算し、該全地球位置把握システム320の誤差または信号品質低下により、該車両位置信号230を間違った位置に表示されることを防止し、車両の位置信号を正しく表示できる。
【図面の簡単な説明】
【0031】
【図1】公知技術の車両搭載型ナビゲーションシステムを搭載した車両の概略図である。
【図2】公知技術の車両搭載型ナビゲーションシステムより生成したエラーメッセージの概略図である。
【図3】本発明の車両搭載型ナビゲーションシステムのブロック図である。
【図4】本発明の車両搭載型ナビゲーションシステムの表示方法のフロー図である。
【図5】本発明の表示修正方法のフロー図である。
【図6】本発明の車両搭載型ナビゲーションシステムの稼働概略図である。
【符号の説明】
【0032】
81 全地球位置把握システム
82 ナビゲーションシステム
9 地球投影位置決定衛星
821 マイクロプロセッサー
822 電子地図データベース
83 表示装置
220 道路
230 車両の位置信号
310 ジャイロ装置
320 全地球位置把握システム
330 車走行速度測定装置
340 電子地図データベース
350 表示スクリーン
360 制御装置
R610、R620、R630、R640、R680,R690 道路リンク
R710、R720、R730、R740 道路リンク
650 現時点の表示位置
660 次の表示位置
670 次の車両位置
【特許請求の範囲】
【請求項1】
ジャイロ装置、表示スクリーン、及び電子地図データベースより構成された車両搭載型ナビゲーションシステムにおいて、該ジャイロ装置より車両走行方向角度を生成し、該電子地図データベースに複数の道路リンクを含まれ、車両の位置信号を該表示スクリーンの表示位置に表示させ、該表示方法は、以下の手順を含まれ、
(A)現在の表示位置を捕捉し、
(B)該電子地図データベースより、現在の表示位置に対応した道路リンク、及び該対応した道路リンクに連結された一つ以上の道路リンクを読み取り、
(C)次の車両位置を捕捉し、
(D)該対応した道路リンクと該連結された一つ以上の道路リンクより、該次の車両位置が第1特定距離を下回る道路リンクを選択した上、第1組道路リンクを生成し、該第1組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、
(E)もし、手順(D)により、該第1組道路リンクに一つ以上の道路リンクの存在が判断されたとき、該ジャイロ装置より生成した車両走行方向角度を次の車両走行方向角度に設定し、
(F)該第1組道路リンクより、該次の車両走行方向角度の差が第1特定角度を下回る道路リンクを選択し、第2組道路リンクを生成した上、該第2組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、
(G)もし手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該次の車両位置と該第2組道路リンクの直線距離を計算した上、該次の車両位置の最短直線距離の道路リンクを選択し、該次の車両位置が最短直線距離の道路リンクの投射点を次の修正位置に設定し、
(H)該車両位置信号を該表示スクリーンの次の表示位置に表示させ、該次の表示位置は該次の修正位置が該表示スクリーンに対応する位置であることを特徴とする修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【請求項2】
さらに以下の手順を含まれ、
(G1)もし手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在しないことを判断されたとき、該手順(B)に対応した道路リンク、及び該連結された一つ以上の道路リンクの加重値を計算し、そのうち、該加重値Wは次の車両位置と該道路リンクとの直線距離R、及び該車両走行方向角度と該道路リンクの角度差△θより構成する関数W=f(R,△θ)とし、
(G2)対応した道路リンク、及び連結された一つ以上の道路リンクより次の車両位置の距離が第2特定距離より近い道路リンクを選択した上、第3組道路リンクを生成する、該第2特定距離は該第1特定距離を上回るため、該第3組道路リンクより、次の車両走行方向角度差が第2特定角度を下回る道路リンクを選択した上、第4組道路リンクを生成し、(G3)該第4組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、
(G4)もし手順(G3)により、該第4組道路リンクに一つ以上の道路リンクが存在することを判断したとき、最小加重値の道路を選択し、該次の車両位置は該最小加重値の道路リンクの投射点を次の修正位置に設定し、手順(H)を実行することを特徴とする請求項1に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【請求項3】
さらに以下の手順を含まれ、
手順(G31)において、もし手順(G3)より該第4組道路リンクに道路リンクが存在しないことを判断されたとき、次の車両位置を次の修正位置に設定し、引き続き手順(H)を実行することを特徴とする請求項1に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【請求項4】
もし手順(D)により、該第1組道路リンクに一つ以上の道路リンクが存在しないことを判断されたとき、手順(G1)、(G2)、(G3)、及び(G4)を実行することを特徴とする請求項2に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【請求項5】
手順(G1)の加重値Wは、以下の公式より算出されることを特徴とする請求項2に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【数1】
【請求項6】
該車両搭載型ナビゲーションシステムはさらに、全地球位置把握システム、及び車両速度検出装置を含まれ、該全地球位置把握システムは該車両に取り付けて、複数の衛星信号を受信した上、全地球座標データ、車両速度データ、及びGPS精度指標データを生成し、該車両速度検出装置は車両に取り付けて、該車両の走行速度を検出して、車両速度信号を生成し、該GPS精度指標データの値が該第1特定値を下回るとき、該車両速度検出装置の車両速度信号、及び該ジャイロ装置の車両走行方向角度に基づいて、手順(C)の次の修正位置を算出することを特徴とする請求項1に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【請求項7】
該全地球位置把握システムはさらに、車両ヘッド角度データを生成し、該GPS精度指標データの値が該第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第1特定速度を上回るとき、該全地球位置把握システムの該車両ヘッド角度データを計算した上、該ジャイロ装置の該車両走行方向角度を修正し、修正角度を生成し、手順(E)において、該ジャイロ装置より生成した該車両走行方向角度に修正角度を加えたものを次の車両走行方向角度に設定することを特徴とする請求項6に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【請求項8】
該GPS精度指標データの値が第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第2特定速度を上回るとき、該全地球位置把握システムの車両速度データを計算し、該車両速度検出装置より生成した車両速度信号を修正した上、修正車両速度を生成し、該車両第2特定速度は該車両第1特定速度を上回ることを特徴とする請求項7に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【請求項9】
該ジャイロ装置は該車両に取り付けて、該車両の進行方向を検出し、車両走行方向角度を生成し、
該全地球位置把握システムは該車両に取り付けて、複数の衛星信号を受信し、該車両の現在位置を示すGPS座標データ、車両速度データ、及びGPS精度指標データを生成し、
電子地図データベースを設け、一つ以上の地図情報と複数の道路リンクを含まれ、
表示スクリーンを設け、車両の位置信号と該一つ以上の地図情報を表示し、
制御装置を該電子地図データベース、該ジャイロ装置及び該全地球位置把握システム、該表示スクリーンに連結し、該制御装置は以下の手順(A)から(H)を実行することにより、該車両信号を該表示スクリーンに表示させる、該手順(A)から手順(H)は、(A)現在位置を選択し、(B)該電子地図データベースより該現在位置に対応する道路とのリンク及び該対応した道路リンクに連結した一つ以上の道路リンクを読み取り、(C)次の車両位置を捉えて、(D)該対応した道路リンクに連結した一つ以上の道路リンクから次の車両位置が第1特定距離の道路リンクを選択し、第1組道路リンクを生成した上、該第1組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、(E) もし、手順(D)により、該第1組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該ジャイロ装置より生成した該車両走行方向角度を次の車両走行方向角度とし、(F)該第1組道路リンクより該次の車両走行方向角度が第1特定角度より小さい道路リンクを選択し、第2組道路リンクを生成した上、該第2組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、(G)もし、手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該次の車両位置と該第2組道路リンクの直線距離を計算した上、該次の車両位置が最短の直線距離の道路リンクの投射点を次の修正位置に設定し、(H) 該車両の位置信号を該表示スクリーンの次の表示位置に表示し、そのうち、該次の表示位置は該次の修正位置に対応した該表示スクリーンの位置であることを特徴とする修正機能付車両搭載型ナビゲーションシステム。
【請求項10】
さらに、車両速度検出装置を該車両に取り付けて、該車両の走行速度を測定し、車両速度信号を生成することを特徴とする請求項9に記載の修正機能付車両搭載型ナビゲーションシステム。
【請求項11】
GPS精度指標データの値が該第1特定値を下回るとき、該車両速度検出装置の車両速度信号と該ジャイロ装置の該車両走行方向角度に基づいて、手順(C)における次の車両位置を算出することを特徴とする請求項10に記載の修正機能付車両搭載型ナビゲーションシステム。
【請求項12】
該GPS精度指標データの値が該第1特定値の値が該第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第1特定速度を上回るとき、該全地球位置把握システムの該車両ヘッド角度データを計算した上、該ジャイロ装置の該車両走行方向角度を修正し、修正角度を生成し、手順(E)において、該ジャイロ装置より生成した該車両走行方向角度に修正角度を加えたものを次の車両走行方向角度に設定することを特徴とする請求項11に記載の修正機能付車両搭載型ナビゲーションシステム。
【請求項13】
該GPS精度指標データの値が第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第2特定速度を上回るとき、該全地球位置把握システムの車両速度データを計算し、該車両速度検出装置より生成した車両速度信号を修正した上、修正車両速度を生成し、該車両第2特定速度は該車両第1特定速度を上回ることを特徴とする請求項12に記載の修正機能付車両搭載型ナビゲーションシステム。
【請求項1】
ジャイロ装置、表示スクリーン、及び電子地図データベースより構成された車両搭載型ナビゲーションシステムにおいて、該ジャイロ装置より車両走行方向角度を生成し、該電子地図データベースに複数の道路リンクを含まれ、車両の位置信号を該表示スクリーンの表示位置に表示させ、該表示方法は、以下の手順を含まれ、
(A)現在の表示位置を捕捉し、
(B)該電子地図データベースより、現在の表示位置に対応した道路リンク、及び該対応した道路リンクに連結された一つ以上の道路リンクを読み取り、
(C)次の車両位置を捕捉し、
(D)該対応した道路リンクと該連結された一つ以上の道路リンクより、該次の車両位置が第1特定距離を下回る道路リンクを選択した上、第1組道路リンクを生成し、該第1組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、
(E)もし、手順(D)により、該第1組道路リンクに一つ以上の道路リンクの存在が判断されたとき、該ジャイロ装置より生成した車両走行方向角度を次の車両走行方向角度に設定し、
(F)該第1組道路リンクより、該次の車両走行方向角度の差が第1特定角度を下回る道路リンクを選択し、第2組道路リンクを生成した上、該第2組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、
(G)もし手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該次の車両位置と該第2組道路リンクの直線距離を計算した上、該次の車両位置の最短直線距離の道路リンクを選択し、該次の車両位置が最短直線距離の道路リンクの投射点を次の修正位置に設定し、
(H)該車両位置信号を該表示スクリーンの次の表示位置に表示させ、該次の表示位置は該次の修正位置が該表示スクリーンに対応する位置であることを特徴とする修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【請求項2】
さらに以下の手順を含まれ、
(G1)もし手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在しないことを判断されたとき、該手順(B)に対応した道路リンク、及び該連結された一つ以上の道路リンクの加重値を計算し、そのうち、該加重値Wは次の車両位置と該道路リンクとの直線距離R、及び該車両走行方向角度と該道路リンクの角度差△θより構成する関数W=f(R,△θ)とし、
(G2)対応した道路リンク、及び連結された一つ以上の道路リンクより次の車両位置の距離が第2特定距離より近い道路リンクを選択した上、第3組道路リンクを生成する、該第2特定距離は該第1特定距離を上回るため、該第3組道路リンクより、次の車両走行方向角度差が第2特定角度を下回る道路リンクを選択した上、第4組道路リンクを生成し、(G3)該第4組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、
(G4)もし手順(G3)により、該第4組道路リンクに一つ以上の道路リンクが存在することを判断したとき、最小加重値の道路を選択し、該次の車両位置は該最小加重値の道路リンクの投射点を次の修正位置に設定し、手順(H)を実行することを特徴とする請求項1に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【請求項3】
さらに以下の手順を含まれ、
手順(G31)において、もし手順(G3)より該第4組道路リンクに道路リンクが存在しないことを判断されたとき、次の車両位置を次の修正位置に設定し、引き続き手順(H)を実行することを特徴とする請求項1に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【請求項4】
もし手順(D)により、該第1組道路リンクに一つ以上の道路リンクが存在しないことを判断されたとき、手順(G1)、(G2)、(G3)、及び(G4)を実行することを特徴とする請求項2に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【請求項5】
手順(G1)の加重値Wは、以下の公式より算出されることを特徴とする請求項2に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【数1】
【請求項6】
該車両搭載型ナビゲーションシステムはさらに、全地球位置把握システム、及び車両速度検出装置を含まれ、該全地球位置把握システムは該車両に取り付けて、複数の衛星信号を受信した上、全地球座標データ、車両速度データ、及びGPS精度指標データを生成し、該車両速度検出装置は車両に取り付けて、該車両の走行速度を検出して、車両速度信号を生成し、該GPS精度指標データの値が該第1特定値を下回るとき、該車両速度検出装置の車両速度信号、及び該ジャイロ装置の車両走行方向角度に基づいて、手順(C)の次の修正位置を算出することを特徴とする請求項1に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【請求項7】
該全地球位置把握システムはさらに、車両ヘッド角度データを生成し、該GPS精度指標データの値が該第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第1特定速度を上回るとき、該全地球位置把握システムの該車両ヘッド角度データを計算した上、該ジャイロ装置の該車両走行方向角度を修正し、修正角度を生成し、手順(E)において、該ジャイロ装置より生成した該車両走行方向角度に修正角度を加えたものを次の車両走行方向角度に設定することを特徴とする請求項6に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【請求項8】
該GPS精度指標データの値が第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第2特定速度を上回るとき、該全地球位置把握システムの車両速度データを計算し、該車両速度検出装置より生成した車両速度信号を修正した上、修正車両速度を生成し、該車両第2特定速度は該車両第1特定速度を上回ることを特徴とする請求項7に記載の修正機能付車両搭載型ナビゲーションシステム及びその表示方法。
【請求項9】
該ジャイロ装置は該車両に取り付けて、該車両の進行方向を検出し、車両走行方向角度を生成し、
該全地球位置把握システムは該車両に取り付けて、複数の衛星信号を受信し、該車両の現在位置を示すGPS座標データ、車両速度データ、及びGPS精度指標データを生成し、
電子地図データベースを設け、一つ以上の地図情報と複数の道路リンクを含まれ、
表示スクリーンを設け、車両の位置信号と該一つ以上の地図情報を表示し、
制御装置を該電子地図データベース、該ジャイロ装置及び該全地球位置把握システム、該表示スクリーンに連結し、該制御装置は以下の手順(A)から(H)を実行することにより、該車両信号を該表示スクリーンに表示させる、該手順(A)から手順(H)は、(A)現在位置を選択し、(B)該電子地図データベースより該現在位置に対応する道路とのリンク及び該対応した道路リンクに連結した一つ以上の道路リンクを読み取り、(C)次の車両位置を捉えて、(D)該対応した道路リンクに連結した一つ以上の道路リンクから次の車両位置が第1特定距離の道路リンクを選択し、第1組道路リンクを生成した上、該第1組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、(E) もし、手順(D)により、該第1組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該ジャイロ装置より生成した該車両走行方向角度を次の車両走行方向角度とし、(F)該第1組道路リンクより該次の車両走行方向角度が第1特定角度より小さい道路リンクを選択し、第2組道路リンクを生成した上、該第2組道路リンクに一つ以上の道路リンクが存在するか否かを判断し、(G)もし、手順(F)により、該第2組道路リンクに一つ以上の道路リンクが存在することを判断したとき、該次の車両位置と該第2組道路リンクの直線距離を計算した上、該次の車両位置が最短の直線距離の道路リンクの投射点を次の修正位置に設定し、(H) 該車両の位置信号を該表示スクリーンの次の表示位置に表示し、そのうち、該次の表示位置は該次の修正位置に対応した該表示スクリーンの位置であることを特徴とする修正機能付車両搭載型ナビゲーションシステム。
【請求項10】
さらに、車両速度検出装置を該車両に取り付けて、該車両の走行速度を測定し、車両速度信号を生成することを特徴とする請求項9に記載の修正機能付車両搭載型ナビゲーションシステム。
【請求項11】
GPS精度指標データの値が該第1特定値を下回るとき、該車両速度検出装置の車両速度信号と該ジャイロ装置の該車両走行方向角度に基づいて、手順(C)における次の車両位置を算出することを特徴とする請求項10に記載の修正機能付車両搭載型ナビゲーションシステム。
【請求項12】
該GPS精度指標データの値が該第1特定値の値が該第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第1特定速度を上回るとき、該全地球位置把握システムの該車両ヘッド角度データを計算した上、該ジャイロ装置の該車両走行方向角度を修正し、修正角度を生成し、手順(E)において、該ジャイロ装置より生成した該車両走行方向角度に修正角度を加えたものを次の車両走行方向角度に設定することを特徴とする請求項11に記載の修正機能付車両搭載型ナビゲーションシステム。
【請求項13】
該GPS精度指標データの値が第1特定値より大きいまたは等しい、かつ、該車両速度データの値が車両第2特定速度を上回るとき、該全地球位置把握システムの車両速度データを計算し、該車両速度検出装置より生成した車両速度信号を修正した上、修正車両速度を生成し、該車両第2特定速度は該車両第1特定速度を上回ることを特徴とする請求項12に記載の修正機能付車両搭載型ナビゲーションシステム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−14924(P2008−14924A)
【公開日】平成20年1月24日(2008.1.24)
【国際特許分類】
【出願番号】特願2006−257523(P2006−257523)
【出願日】平成18年9月22日(2006.9.22)
【出願人】(501335874)行毅科技股▲ふん▼有限公司 (20)
【Fターム(参考)】
【公開日】平成20年1月24日(2008.1.24)
【国際特許分類】
【出願日】平成18年9月22日(2006.9.22)
【出願人】(501335874)行毅科技股▲ふん▼有限公司 (20)
【Fターム(参考)】
[ Back to top ]