
個人用乗物のための故障許容設計及び安全保証装置
【課題】故障検出及び故障後の操作が可能な電動自動車の存在が発見された。
【解決手段】その車は、モーター駆動に接続される複数の制御要素と、故障が識別されるように、その制御構成要素のそれぞれの出力を他の制御要素の出力と比較するための比較器とを備える。その車は、バスによって複数の制御チャネルに接続される多数のプロセッサと、故障が識別されたあらゆるプロセッサの出力を抑制する決定装置とを備えてもよい。また安全を保証するジョイスティックを備えてもよい。
【解決手段】その車は、モーター駆動に接続される複数の制御要素と、故障が識別されるように、その制御構成要素のそれぞれの出力を他の制御要素の出力と比較するための比較器とを備える。その車は、バスによって複数の制御チャネルに接続される多数のプロセッサと、故障が識別されたあらゆるプロセッサの出力を抑制する決定装置とを備えてもよい。また安全を保証するジョイスティックを備えてもよい。
【発明の詳細な説明】
【発明の詳細な説明】
【0001】
発明の技術分野
本発明は、動力を備えた車両のためのシステム設計に関し、より詳しくは、システム設計の余剰特性に関する。
発明の背景技術
【0002】
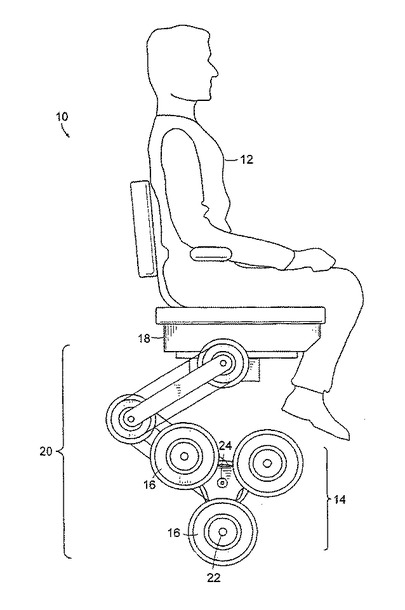
身体障害者によって用いられるような個人的乗物は、一例として、自走式の、ユーザー誘導可能なものであってもよく、さらに、たった2つの車輪が同時に接地しているときのように、1以上の前後又は左右の平面内で安定化を必要としてもよい。より詳しくは、そのような車両は、図1において一般に数字10によって示される。ユーザー12又は他のペイロードを移送するための車両10は、各車輪及び/又は各クラスターが対等にあるいは独立して電動である1以上の車輪16又は車輪16の一群(クラスター)14を含む。そのような車両は、米国特許第5,701,965号及び米国特許公開番号第08/384,705号に開示され、それらは、参照によりここに組み込まれる。この種の車両は、先行技術に開示されるものに追加するシステム設計特徴を使用するときに、より効果的にそして安全に作動され得る。
【発明の概要】
【0003】
本発明の好ましい実施の形態によれば、故障検出が可能な陸上移動のための車両が提供される。その車両は、荷重をサポートするための支持構造物と、移動可能性をその支持構造物に提供するための接地モジュールと、その接地要素の制御可能な運動を可能にするモーター駆動装置形状とを持つ。それに加えて、その車両は、複数の制御要素を持ち、各制御要素は、出力と、第1と他の制御要素のいずれの故障かを識別するために第1の制御要素の出力ともう一つの制御要素との出力を比較する比較器を持つ。制御要素は、少なくとも一つの位置及び方向を感知するセンサーと、複数の余剰制御チャネルとを含んでもよく、各制御チャネルは、独立してモーター駆動装置を制御することができ、複数のプロセッサは、システムバスによって各余剰制御チャネルに接続される。各プロセッサは出力を持ち、そして、各プロセッサは、ユーザーからの入力コマンド、センサーからの信号、及び各他のプロセッサの出力を受信することができる。
【0004】
本発明の代わりの実施の形態によれば、制御要素は、車両の位置又は方向を感知するための複数のセンサー及び複数の制御チャネルの間から選択されてもよく、各制御チャネルは、モーター駆動を独立して制御することができる。制御要素は、また、システムバスによって制御チャネルに接続される複数のプロセッサを含んでもよく、システムバスは、複数のプロセッサ、並びに、少なくとも一つのユーザー入力セット、バッテリー容量表示部、温度表示部、シート高制御部、及び故障保護制御部を含んでもよい。いずれかの制御要素の出力は、モーター駆動の機械的応答速度を超える速度で供給され得る。各プロセッサは、ユーザーからの入力コマンド、センサーからの信号、及び各他のプロセッサの出力を受信可能であってもよく、比較器は、いずれのプロセッサの故障かを識別するためのプロセッサの出力を比較してもよく、また、システムバスから故障プロセッサを切り離すための切断回路を含んでもよく、そして、すべての他のプロセッサを用いる車両の連続操作を可能にするような方法で故障が識別されたいずれかのプロセッサの出力を抑制してもよい。
【0005】
本発明のさらなる実施の形態によれば、荷重をサポートするための支持構造物と、その支持構造物に移動能力を提供する接地要素と、ローカル軸に関して車軸について移動可能な接地要素と、ローカル軸が素地構造物に関して移動されるように、車軸について接地要素の制御可能な移動を可能にし、車軸の移動を可能にするためのモーター駆動とを持つ車両が提供される。センサーは、車両の少なくとも一つの位置及び方向を感知するために提供される。複数の制御チャネルのように、各制御チャネルは、モーター駆動を独立して制御可能である。車両は、システムバスによって制御チャネルに接続される複数のプロセッサと、いずれのプロセッサの故障かを識別するためのプロセッサの出力を相互比較する比較器とを持つ。各プロセッサは出力を持ち、各プロセッサは、ユーザーからの入力コマンドと、センサーからの信号と、他のプロセッサのそれぞれの出力とを受信することができる。車両は、複数の余剰巻線を持つモーター駆動を持ってもよい。
【0006】
本発明のもう一つの実施の形態によれば、フェイルセーフのジョイスティック(手動式操作装置)を提供する。そのジョイスティックは、ユーザーによって解放されるときジョイスティックを中心位置に戻すセンタリング機構と、中心位置でジョイスティックを検出するためのセンサーとを持つ。
【好ましい実施の形態の詳細な記述】
【0007】
本発明は、添付図面を利用して以下の記述を参照することによって、より容易に理解されるだろう。
【0008】
図1において、車両10の基礎部分は、ユーザー12をサポートするための支持体18と、支持体18を移送するための接地モジュール20と、車輪16及び/又はクラスター14を駆動するための1以上のアクチュエーター機構(図示せず)と、ユーザー及び車両の位置と配置、さらには車両の位置と配置の変化の、測定される時間割合による望ましいパラメータ入力に従ってアクチュエーター機構を制御するための1以上の制御部と、変化の測定される時間割合と車両10の構成とを含むように構成されてもよく、これらに限定されるものでもない。車両の位置及び/又は配置は、連続的又は周期的にその出力が1以上の制御部によって使用される1セットのセンサー(図示せず)によって監視される。一例として、変位と傾きの情報を提供するセンサーは、特定の制御法則に従って、及び、米国特許第5,701,965号と米国特許出願番号第08/384,705号に開示されるように、制御部が車両の車輪又はクラスターに加えられるトルクを計算することを可能にする。
【0009】
説明として、「接地モジュール20」の表現に関して、又は車両10が動きまわる表面に関連して用いられるよう用語「地面(ground)」は、車両10によって移動されるあらゆる表面で囲われた建物の内部又は外部であってもよい。用語「個人輸送機(personal transporter)」は、ここでは用語「車両(vehicle)」と交換可能に用いられる。それに加えて、用語「車輪(wheels)」は、地上で車両10を推進させることができる弓形要素又は他の接地部材を同等に含んでもよい。車両の「位置(position)」は、地面に関して固定された基準点を意味するのに対して、「配置(configuration)」は、互いに関して車両の構成要素の配置を意味する。それは、制限せずに、特定の速度、加速度、ジョイスティック感度等のような、ソフトウェアでなされる設定と同様に、シート高、軸傾斜等のような特性を含む。特に、本発明の好ましい実施の形態によれば、車輪16は、車軸22の周りを回転する。その車軸22は、クラスター回転の軸を構成するクラスター車軸24の周りを回転する。支持体18は、その結果、クラスター14に関して上昇され、あるいは下降され得る。車両10に存在する他の内部自由度は、同様に、ここで及び添付される特許請求の範囲で用いられるように、用語「配置」の範囲内に含まれる。同様に、重力に関して車両10の角度で表される方向又は傾きもまた、用語「配置」の範囲内に含まれる。
【0010】
ユーザー入力は、ジョイスティック又は他のインターフェースにより、あるいはユーザーの傾きにより、若しくは、外物に力を加えることにより、車両によって移送されるユーザーによって提供されてもよい。それに加えて、ユーザー入力は、車両によって運ばれないアシスタントにより提供されてもよい。彼は、車両を傾けさせようとするために、補助ハンドルに、力を適用することによって車両の移動及び/又は配置を支配してもよい。その代わりに、ユーザー入力は、車両から分離される制御モジュールによってアシスタントにより提供されてもよい。ここでは、制御モジュールは、ジョイスティック、スイッチ、またはキーパッド入力、あるいは他のいずれの方法をも含む。「センサー」は、車両の物理的位置又は配置のあらゆる特徴を監視するためのいかなる装置をも指し、例えば、傾きを測定するための傾斜計、ジャイロスコープ、又は車輪又はクラスター等のいずれかの角度で示される方向やその変化率を含む。
【0011】
あるタイプの故障の後に車両を安全に操作することは、上記にリストされる基本的車両部品の1以上の故障余裕を必要とし得る。この記述及び添付の特許請求の範囲で用いられるように、「余剰(redundancy)」は、車両の故障余裕に寄与するある成分の重複を意味する。「余剰」は、また、データのオーバーサンプリングを意味する。従って、例えば、データは、システムの機械的応答速度よりも実質的に高い速度でセンサーによって提供され得る。この場合、もし、データがシステムバス又は他の場所で変造されるならば、応答が提供されなければならない前に新しいデータが提供されるので、それは、システム応答をもたらさない。本発明の好ましい実施の形態では、基本的車両部品は、一例として、これから記述される図2のブロック図に示されるもののように、システムアーキテクチャーにおいて電子的に相互に連結される。
【0012】
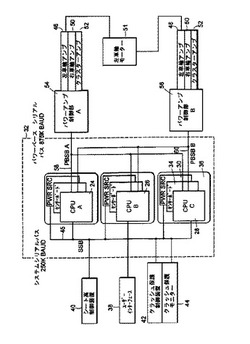
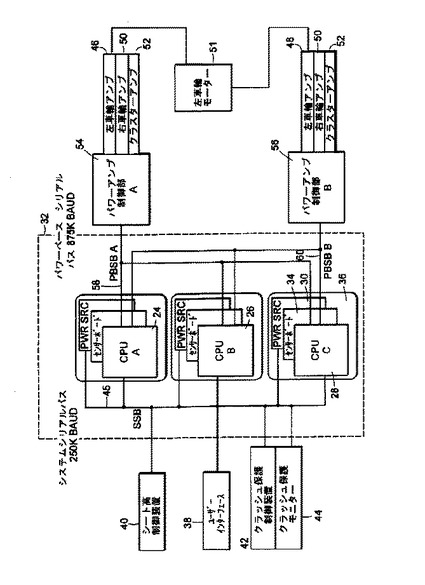
それぞれの電源30とともに、センサーエレクトロニクス34と制御プロセッサ24、26、及び28との組み合わせは、パワーベース32として一まとめにして言及される。パワーベース32は、多数のパワーベースプロセッサ36を含み、そのそれぞれは、センサーエレクトロニクス34、中央演算処理装置(CPU)24、26、及び28、並びに、電源30を含む。各CPU28は、関連付けられた電源30とセンサーエレクトロニクスボード34を持つ。
【0013】
パワーベース32は、車両の周辺のあるいは特別な機能を制御するための他の制御部と同様に、ユーザー入力を受信するためのインターフェース38に電子的に接続される。パワーベース32に接続される他の制御部及び周辺装置は、クラッシュ保護制御部42とクラッシュ保護モニター44、及びバッテリー充電器とモニター(図示せず)と同様に、シート高制御部40を含むが、これらに限られるものではない。クラッシュ保護制御部42は、1997年11月4日に出願された継続中の米国仮出願第60/064,175号に記述されるように、1以上のエアバックの配置、あるいは、その代わりに、1997年10月14日に出願された継続中の米国仮出願第60/061,974号に記述されるように、接地モジュール20からの支持体18の分離(図1に示される)のような機能を提供してもよい。ユーザーインターフェース38と、周辺制御部40及び42と、パワーベース32の各パワーベースプロセッサ24、26、及び28のそれぞれとの間の連絡は、システムシリアルバス45を介する。それは、好ましい実施の形態では、250kボー(Baud)の容量を持ち、時分割多元接続方式(TDMA)プロトコルを使用する非同期チャネルである。
【0014】
車輪16とクラスター14(図1に示される)のためのアクチュエーターは、左車輪モーター51のような、典型的にモーターであり、好ましい実施の形態では、そのアクチュエーターはサーボモーターである。左車輪のためのアクチュエーター51は、余剰左車輪アンプ46及び48のいずれかによって駆動されてもよい。同様に、右車輪アンプ50が右車輪のためのアクチュエーターを駆動し、クラスターアンプ52がクラスターのアクチュエーターを駆動する。本発明の好ましい実施の形態では、負荷分散パワーチャネルは、それによって左車輪アンプ46と48の両方が左車輪モーター51の全性能のために必要とされるものを供給される。しかしながら、各左車輪アンプは、車両が安全に静止するために来ることを可能にするために、短い時間制限された性能を提供することができる。パワーチャネルは、また、ここ及び添付の特許請求の範囲では、「制御チャネル」として言及されてもよい。追加の余剰は、各モーターの巻線の半分が車両の操作に十分なトルクを供給するために、各モーター51に供給されてもよい。各余剰フルセットのアンプ46、50、及び52は、パワーアンプ制御部54及び56の一つによって制御される。特に、強電流直列素子がバッテリーとモーターとの間に要求されないように、車輪アンプ46と48を介してサーボモーターに全電流を供給することは有利である。余剰パワーベースプロセッサ24、26、及び28とパワーアンプ制御部54との間の連絡は、フルの余剰を提供するように、パワーベースシリアルバス58を介し、余剰パワープロセッサ24、26、及び28とパワーアンプ制御部56との間の連絡は、第2のパワーベースシリアルバス60を介する。
【0015】
図2に参照して上記システム記述に照らして評価され得るように、車両と結び付けられる制御アーキテクチャーは、システムの種々の構成要素に付与する異なる不静定次数のために、高度に余剰であってもよい。
【0016】
いくつかの問題は、上述される余剰を考慮して扱われなければならない。一つの問題は、余剰構成要素が同時に存在し、賦活であるときに生じる制御と決定の割当てである。
【0017】
シリアルバスの制御 上述される好ましいTDMAプロトコルによれば、シリアルバス45上の各装置は、予め定義されるデータセットを移し、広めるために、割り当てられたタイムスロットを持つ。シリアルバス45上の全装置は、ソフトウエアで設定可能な制御レジスタに基づいて、データの特定の送り主に応答し、あるいは従うためにプログラムされる。シリアルバス45は、シリアルバスマスター、例えば、例示のために、プロセッサ24としてここに示される「マスターパワーベースプロセッサ(Master Power Base Processor)」に対応するパワーベースプロセッサ24、26、及び28として言及される特定の一つのプロセッサによって制御される。シリアルバスマスターは、マスター同期パケットとバスエラーデータコレクションを制御する。マスターパワーベースプロセッサインターフェース障害の場合、以下に記述されるように決定される「二次パワーベースマスター」が、システムシリアルバスマスターシップの役を果す。
【0018】
故障操作の重大な構成要素 構成要素の操作が、車両の占有者を危険にさらさないで、車両をセーフモードにするために最も重要である場合、故障許容の三重余剰が、本発明の好ましい実施の形態に従って、故障操作機能性を作るために、用いられる。故障操作の重大な構成要素の一例は、3つのいずれかが供給され、図2のパワーベースプロセッサ24、26、及び28として示されるパワーベースプロセッサである。パワーベースプロセッサ24、26、及び28のそれぞれは、また、信頼性の高い出力が、車両のバランス、バッテリー状態等を含む車両の重大な機能性を補償するために必要とされる重要なセンサーの特定のセットに結び付けられる。それにより、あらゆるプロセッサ又はセンサーの1点の故障が検出可能となる。それに加えて、本発明の一実施の形態によれば、あらゆるプロセッサ又は検出器の操作における故障の検出は、現在制御しているパワーベースプロセッサに、そして、そこからユーザーインターフェース38へ伝達され、それによって、視覚的、あるいは視覚的でない指示器によりユーザーに伝達される。視覚的でない表示器は、2つの例を挙げれば、可聴警報又は触覚手段によって知覚できるものを含むが、これらに限られない。潜在的危険をユーザーに警告するための視覚的でない指示のもう一つの手段は、周期的か非周期的のいずれかの、車輪駆動アンプにおける断続的な駆動信号の重ね合わせであり、それによって、乗客によって感知される車両のむらのある動きが作り出される。
【0019】
三重の余剰センサー又はプロセッサの場合、故障は、余剰センサーの残りの一対によって供給されるデータと各センサーによって供給されるデータとを比較することによって検出され、それによって、故障操作機能性を作り出してもよい。ここで、車両は、もし、一つに欠陥があると(記述された比較、あるいは別な方法で)決定されるならば、車両の占有者が危険にさらされることなく、車両がセーフモードに移行するまで、残りのセンサーによって供給される情報に基づいて作動し続けてもよい。そのような場合、残りのセンサー又はプロセッサは、車両の機能性の減少レベルで作動が続くために、規定された制限内で一致するように要求されてもよい。そして、作動は、残りのセンサー又はプロセッサ間の不調和の場合にすぐに終了させてもよい。比較器は、電子工学分野の当業者に周知のように、電子スイッチ回路あるいは少なくとも一つのパワーベースプロセッサ上で実行するソフトウェアを用いて、あらゆる誤ったプロセッサ又はセンサーのシリアルバス45、58、及び60への接続を無能にするために提供される。例えば、作動の一モードでは、パワーアンプ制御部(PAC)は、パワーベースプロセッサ(PBP)A及びPBPのBからの結果を格納する。もし、2つの結果が同じであるならば、PACは、両方が正しいので、PBPのAからの結果を用いる。もし、PBPのAとPBPのB2つの結果が異なるならば、PACは、何をすべきかを指示されるまで1サイクル待つ。PBPのCは、第2のサイクルでそれ自身をシャットダウンするために故障プロセッサに信号を送り、第3のサイクルにおいて、PACは、作動しているPBPからだけ聞き、その命令に従う。
【0020】
安全を保証する重大な構成要素 構成要素の故障が車両の操作が安全に終了するために要求される時間中許容される場合、2重に余剰な構成要素が使用される。この範疇に分類されるセンサーの場合、センサーの一つの故障は、それぞれのセンサーの出力を比較することによって検出される。不一致が検出される場合、車両の操作は、安全に終了させられ、それによって、安全を保証する機能性が提供される。安全を保証する機能性は、典型的に、接地モジュール内の力ハンドル(車両の外部制御のために用いられる)、ブレーキ、及びシート設備と同様に、各モーター51、車輪アンプ46、48、及び50、クラスターアンプ52、並びに、パワーアンプ制御部54及び56のために提供される。
【0021】
故障は、非余剰なセンサーの場合、センサー故障モードに特有なセンサー出力の特徴に基づいて、あるいは予期される性能に比較して、検出される。非余剰センサーは、例えば、シート高符号器を含んでもよい。
【0022】
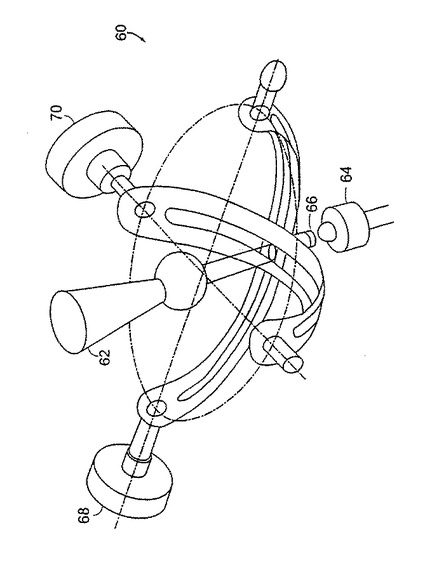
安全を保証するジョイスティック 図3において、安全を保証するジョイスティック機構が示され、一般に自動的に中心に戻るジョイスティック62を持つ数字60によって示される。標準の電位差計ジョイスティックが、ジョイスティックに取り付けられる装置にドリフト又は「ハードオーバー」状態をおこさせる故障を生じ得るのに対して、ジョイスティック機構60は、ジョイスティック62が中心位置にあるときを検出する独立した手段を提供する。例えば、ホール効果センサーであってもよいセンサー64は、センサー64との位置合わせにおいて、ジョイスティック柱66が中心位置であるときを感知する。電位差計68及び70は、2つの直交軸に関してジョイスティック62の位置を感知する。電位差計68及び70のいずれかに故障が起こる場合、もし、ジョイスティック60が解放されているならば、それが自動的に中心に戻るジョイスティックであるので、ジョイスティック60は、中心に戻り、センサー64とかみ合い、それによって、故障の電位差計システムから独立しているシステムに信号を供給する。
【0023】
付随する操作制限 上述のような構成要素の故障の検出に加えて、本発明の代わりの実施の形態において、車両の占有者の安全を提供するために、追加の制御部特性が与えられてもよい。米国特許第5,701,965号及び米国特許出願番号第08/384,705号に記述されるような車両制御の種々のモードでは、トルクは、ユーザー入力又は車両バランスのような内部制御目標によって決定される特定の制御目標を達成するために、クラスター又は車輪の適切なセットに適用される。車両の車輪が地面との接触を一時的に失う場合、浮揚している車輪の回転は、地面に関して車両位置の確かな一定量ではなく、車輪へのトルクの適用を制御することにおける車輪の回転効果は、これらの状況下における車輪の加速を効果的に制限して、制限されなければならない。
【0024】
スピードを制限するための追加の基部は、十分な予備トルクが常に車両の安定性を維持するために利用可能なように、残存するバッテリー容量又は空き高への言及を含む。さらに、もし、モーターがパワー再生のために用いられるならば、斜面を下るときにバッテリーの過充電を防ぐために車両のスピードが制限されてもよい。同様に、分路調整器の散逸要求は、下っている車両の最大スピードを減速することによって減少し得る。それに加えて、車両速度は、横安定性制約に従ってシート高を基礎として制限されてもよい。スピード制限に加えて、車両の操作のモードは、上述のように得られる故障データを基礎にして制限されてもよい。
【0025】
本発明の記述される実施の形態は、単に例示的であると意図され、非常に多くの変形及び改良は、当業者にとって明白である。すべての変形及び改良は、添付される特許請求の範囲に定義されるように、本発明の範囲内であるように意図される。
【図面の簡単な説明】
【0026】
【図1】図1は、本発明の一実施の形態が有利に使用され得るタイプの先行技術の個人的乗物の側面図である。
【図2】図2は、本発明の好ましい実施の形態における個人的乗物を制御するための制御構造のブロック図である。
【図3】図3は、本発明の一実施の形態におけるフェイルセーフジョイスティックの斜視図である。
【発明の詳細な説明】
【0001】
発明の技術分野
本発明は、動力を備えた車両のためのシステム設計に関し、より詳しくは、システム設計の余剰特性に関する。
発明の背景技術
【0002】
身体障害者によって用いられるような個人的乗物は、一例として、自走式の、ユーザー誘導可能なものであってもよく、さらに、たった2つの車輪が同時に接地しているときのように、1以上の前後又は左右の平面内で安定化を必要としてもよい。より詳しくは、そのような車両は、図1において一般に数字10によって示される。ユーザー12又は他のペイロードを移送するための車両10は、各車輪及び/又は各クラスターが対等にあるいは独立して電動である1以上の車輪16又は車輪16の一群(クラスター)14を含む。そのような車両は、米国特許第5,701,965号及び米国特許公開番号第08/384,705号に開示され、それらは、参照によりここに組み込まれる。この種の車両は、先行技術に開示されるものに追加するシステム設計特徴を使用するときに、より効果的にそして安全に作動され得る。
【発明の概要】
【0003】
本発明の好ましい実施の形態によれば、故障検出が可能な陸上移動のための車両が提供される。その車両は、荷重をサポートするための支持構造物と、移動可能性をその支持構造物に提供するための接地モジュールと、その接地要素の制御可能な運動を可能にするモーター駆動装置形状とを持つ。それに加えて、その車両は、複数の制御要素を持ち、各制御要素は、出力と、第1と他の制御要素のいずれの故障かを識別するために第1の制御要素の出力ともう一つの制御要素との出力を比較する比較器を持つ。制御要素は、少なくとも一つの位置及び方向を感知するセンサーと、複数の余剰制御チャネルとを含んでもよく、各制御チャネルは、独立してモーター駆動装置を制御することができ、複数のプロセッサは、システムバスによって各余剰制御チャネルに接続される。各プロセッサは出力を持ち、そして、各プロセッサは、ユーザーからの入力コマンド、センサーからの信号、及び各他のプロセッサの出力を受信することができる。
【0004】
本発明の代わりの実施の形態によれば、制御要素は、車両の位置又は方向を感知するための複数のセンサー及び複数の制御チャネルの間から選択されてもよく、各制御チャネルは、モーター駆動を独立して制御することができる。制御要素は、また、システムバスによって制御チャネルに接続される複数のプロセッサを含んでもよく、システムバスは、複数のプロセッサ、並びに、少なくとも一つのユーザー入力セット、バッテリー容量表示部、温度表示部、シート高制御部、及び故障保護制御部を含んでもよい。いずれかの制御要素の出力は、モーター駆動の機械的応答速度を超える速度で供給され得る。各プロセッサは、ユーザーからの入力コマンド、センサーからの信号、及び各他のプロセッサの出力を受信可能であってもよく、比較器は、いずれのプロセッサの故障かを識別するためのプロセッサの出力を比較してもよく、また、システムバスから故障プロセッサを切り離すための切断回路を含んでもよく、そして、すべての他のプロセッサを用いる車両の連続操作を可能にするような方法で故障が識別されたいずれかのプロセッサの出力を抑制してもよい。
【0005】
本発明のさらなる実施の形態によれば、荷重をサポートするための支持構造物と、その支持構造物に移動能力を提供する接地要素と、ローカル軸に関して車軸について移動可能な接地要素と、ローカル軸が素地構造物に関して移動されるように、車軸について接地要素の制御可能な移動を可能にし、車軸の移動を可能にするためのモーター駆動とを持つ車両が提供される。センサーは、車両の少なくとも一つの位置及び方向を感知するために提供される。複数の制御チャネルのように、各制御チャネルは、モーター駆動を独立して制御可能である。車両は、システムバスによって制御チャネルに接続される複数のプロセッサと、いずれのプロセッサの故障かを識別するためのプロセッサの出力を相互比較する比較器とを持つ。各プロセッサは出力を持ち、各プロセッサは、ユーザーからの入力コマンドと、センサーからの信号と、他のプロセッサのそれぞれの出力とを受信することができる。車両は、複数の余剰巻線を持つモーター駆動を持ってもよい。
【0006】
本発明のもう一つの実施の形態によれば、フェイルセーフのジョイスティック(手動式操作装置)を提供する。そのジョイスティックは、ユーザーによって解放されるときジョイスティックを中心位置に戻すセンタリング機構と、中心位置でジョイスティックを検出するためのセンサーとを持つ。
【好ましい実施の形態の詳細な記述】
【0007】
本発明は、添付図面を利用して以下の記述を参照することによって、より容易に理解されるだろう。
【0008】
図1において、車両10の基礎部分は、ユーザー12をサポートするための支持体18と、支持体18を移送するための接地モジュール20と、車輪16及び/又はクラスター14を駆動するための1以上のアクチュエーター機構(図示せず)と、ユーザー及び車両の位置と配置、さらには車両の位置と配置の変化の、測定される時間割合による望ましいパラメータ入力に従ってアクチュエーター機構を制御するための1以上の制御部と、変化の測定される時間割合と車両10の構成とを含むように構成されてもよく、これらに限定されるものでもない。車両の位置及び/又は配置は、連続的又は周期的にその出力が1以上の制御部によって使用される1セットのセンサー(図示せず)によって監視される。一例として、変位と傾きの情報を提供するセンサーは、特定の制御法則に従って、及び、米国特許第5,701,965号と米国特許出願番号第08/384,705号に開示されるように、制御部が車両の車輪又はクラスターに加えられるトルクを計算することを可能にする。
【0009】
説明として、「接地モジュール20」の表現に関して、又は車両10が動きまわる表面に関連して用いられるよう用語「地面(ground)」は、車両10によって移動されるあらゆる表面で囲われた建物の内部又は外部であってもよい。用語「個人輸送機(personal transporter)」は、ここでは用語「車両(vehicle)」と交換可能に用いられる。それに加えて、用語「車輪(wheels)」は、地上で車両10を推進させることができる弓形要素又は他の接地部材を同等に含んでもよい。車両の「位置(position)」は、地面に関して固定された基準点を意味するのに対して、「配置(configuration)」は、互いに関して車両の構成要素の配置を意味する。それは、制限せずに、特定の速度、加速度、ジョイスティック感度等のような、ソフトウェアでなされる設定と同様に、シート高、軸傾斜等のような特性を含む。特に、本発明の好ましい実施の形態によれば、車輪16は、車軸22の周りを回転する。その車軸22は、クラスター回転の軸を構成するクラスター車軸24の周りを回転する。支持体18は、その結果、クラスター14に関して上昇され、あるいは下降され得る。車両10に存在する他の内部自由度は、同様に、ここで及び添付される特許請求の範囲で用いられるように、用語「配置」の範囲内に含まれる。同様に、重力に関して車両10の角度で表される方向又は傾きもまた、用語「配置」の範囲内に含まれる。
【0010】
ユーザー入力は、ジョイスティック又は他のインターフェースにより、あるいはユーザーの傾きにより、若しくは、外物に力を加えることにより、車両によって移送されるユーザーによって提供されてもよい。それに加えて、ユーザー入力は、車両によって運ばれないアシスタントにより提供されてもよい。彼は、車両を傾けさせようとするために、補助ハンドルに、力を適用することによって車両の移動及び/又は配置を支配してもよい。その代わりに、ユーザー入力は、車両から分離される制御モジュールによってアシスタントにより提供されてもよい。ここでは、制御モジュールは、ジョイスティック、スイッチ、またはキーパッド入力、あるいは他のいずれの方法をも含む。「センサー」は、車両の物理的位置又は配置のあらゆる特徴を監視するためのいかなる装置をも指し、例えば、傾きを測定するための傾斜計、ジャイロスコープ、又は車輪又はクラスター等のいずれかの角度で示される方向やその変化率を含む。
【0011】
あるタイプの故障の後に車両を安全に操作することは、上記にリストされる基本的車両部品の1以上の故障余裕を必要とし得る。この記述及び添付の特許請求の範囲で用いられるように、「余剰(redundancy)」は、車両の故障余裕に寄与するある成分の重複を意味する。「余剰」は、また、データのオーバーサンプリングを意味する。従って、例えば、データは、システムの機械的応答速度よりも実質的に高い速度でセンサーによって提供され得る。この場合、もし、データがシステムバス又は他の場所で変造されるならば、応答が提供されなければならない前に新しいデータが提供されるので、それは、システム応答をもたらさない。本発明の好ましい実施の形態では、基本的車両部品は、一例として、これから記述される図2のブロック図に示されるもののように、システムアーキテクチャーにおいて電子的に相互に連結される。
【0012】
それぞれの電源30とともに、センサーエレクトロニクス34と制御プロセッサ24、26、及び28との組み合わせは、パワーベース32として一まとめにして言及される。パワーベース32は、多数のパワーベースプロセッサ36を含み、そのそれぞれは、センサーエレクトロニクス34、中央演算処理装置(CPU)24、26、及び28、並びに、電源30を含む。各CPU28は、関連付けられた電源30とセンサーエレクトロニクスボード34を持つ。
【0013】
パワーベース32は、車両の周辺のあるいは特別な機能を制御するための他の制御部と同様に、ユーザー入力を受信するためのインターフェース38に電子的に接続される。パワーベース32に接続される他の制御部及び周辺装置は、クラッシュ保護制御部42とクラッシュ保護モニター44、及びバッテリー充電器とモニター(図示せず)と同様に、シート高制御部40を含むが、これらに限られるものではない。クラッシュ保護制御部42は、1997年11月4日に出願された継続中の米国仮出願第60/064,175号に記述されるように、1以上のエアバックの配置、あるいは、その代わりに、1997年10月14日に出願された継続中の米国仮出願第60/061,974号に記述されるように、接地モジュール20からの支持体18の分離(図1に示される)のような機能を提供してもよい。ユーザーインターフェース38と、周辺制御部40及び42と、パワーベース32の各パワーベースプロセッサ24、26、及び28のそれぞれとの間の連絡は、システムシリアルバス45を介する。それは、好ましい実施の形態では、250kボー(Baud)の容量を持ち、時分割多元接続方式(TDMA)プロトコルを使用する非同期チャネルである。
【0014】
車輪16とクラスター14(図1に示される)のためのアクチュエーターは、左車輪モーター51のような、典型的にモーターであり、好ましい実施の形態では、そのアクチュエーターはサーボモーターである。左車輪のためのアクチュエーター51は、余剰左車輪アンプ46及び48のいずれかによって駆動されてもよい。同様に、右車輪アンプ50が右車輪のためのアクチュエーターを駆動し、クラスターアンプ52がクラスターのアクチュエーターを駆動する。本発明の好ましい実施の形態では、負荷分散パワーチャネルは、それによって左車輪アンプ46と48の両方が左車輪モーター51の全性能のために必要とされるものを供給される。しかしながら、各左車輪アンプは、車両が安全に静止するために来ることを可能にするために、短い時間制限された性能を提供することができる。パワーチャネルは、また、ここ及び添付の特許請求の範囲では、「制御チャネル」として言及されてもよい。追加の余剰は、各モーターの巻線の半分が車両の操作に十分なトルクを供給するために、各モーター51に供給されてもよい。各余剰フルセットのアンプ46、50、及び52は、パワーアンプ制御部54及び56の一つによって制御される。特に、強電流直列素子がバッテリーとモーターとの間に要求されないように、車輪アンプ46と48を介してサーボモーターに全電流を供給することは有利である。余剰パワーベースプロセッサ24、26、及び28とパワーアンプ制御部54との間の連絡は、フルの余剰を提供するように、パワーベースシリアルバス58を介し、余剰パワープロセッサ24、26、及び28とパワーアンプ制御部56との間の連絡は、第2のパワーベースシリアルバス60を介する。
【0015】
図2に参照して上記システム記述に照らして評価され得るように、車両と結び付けられる制御アーキテクチャーは、システムの種々の構成要素に付与する異なる不静定次数のために、高度に余剰であってもよい。
【0016】
いくつかの問題は、上述される余剰を考慮して扱われなければならない。一つの問題は、余剰構成要素が同時に存在し、賦活であるときに生じる制御と決定の割当てである。
【0017】
シリアルバスの制御 上述される好ましいTDMAプロトコルによれば、シリアルバス45上の各装置は、予め定義されるデータセットを移し、広めるために、割り当てられたタイムスロットを持つ。シリアルバス45上の全装置は、ソフトウエアで設定可能な制御レジスタに基づいて、データの特定の送り主に応答し、あるいは従うためにプログラムされる。シリアルバス45は、シリアルバスマスター、例えば、例示のために、プロセッサ24としてここに示される「マスターパワーベースプロセッサ(Master Power Base Processor)」に対応するパワーベースプロセッサ24、26、及び28として言及される特定の一つのプロセッサによって制御される。シリアルバスマスターは、マスター同期パケットとバスエラーデータコレクションを制御する。マスターパワーベースプロセッサインターフェース障害の場合、以下に記述されるように決定される「二次パワーベースマスター」が、システムシリアルバスマスターシップの役を果す。
【0018】
故障操作の重大な構成要素 構成要素の操作が、車両の占有者を危険にさらさないで、車両をセーフモードにするために最も重要である場合、故障許容の三重余剰が、本発明の好ましい実施の形態に従って、故障操作機能性を作るために、用いられる。故障操作の重大な構成要素の一例は、3つのいずれかが供給され、図2のパワーベースプロセッサ24、26、及び28として示されるパワーベースプロセッサである。パワーベースプロセッサ24、26、及び28のそれぞれは、また、信頼性の高い出力が、車両のバランス、バッテリー状態等を含む車両の重大な機能性を補償するために必要とされる重要なセンサーの特定のセットに結び付けられる。それにより、あらゆるプロセッサ又はセンサーの1点の故障が検出可能となる。それに加えて、本発明の一実施の形態によれば、あらゆるプロセッサ又は検出器の操作における故障の検出は、現在制御しているパワーベースプロセッサに、そして、そこからユーザーインターフェース38へ伝達され、それによって、視覚的、あるいは視覚的でない指示器によりユーザーに伝達される。視覚的でない表示器は、2つの例を挙げれば、可聴警報又は触覚手段によって知覚できるものを含むが、これらに限られない。潜在的危険をユーザーに警告するための視覚的でない指示のもう一つの手段は、周期的か非周期的のいずれかの、車輪駆動アンプにおける断続的な駆動信号の重ね合わせであり、それによって、乗客によって感知される車両のむらのある動きが作り出される。
【0019】
三重の余剰センサー又はプロセッサの場合、故障は、余剰センサーの残りの一対によって供給されるデータと各センサーによって供給されるデータとを比較することによって検出され、それによって、故障操作機能性を作り出してもよい。ここで、車両は、もし、一つに欠陥があると(記述された比較、あるいは別な方法で)決定されるならば、車両の占有者が危険にさらされることなく、車両がセーフモードに移行するまで、残りのセンサーによって供給される情報に基づいて作動し続けてもよい。そのような場合、残りのセンサー又はプロセッサは、車両の機能性の減少レベルで作動が続くために、規定された制限内で一致するように要求されてもよい。そして、作動は、残りのセンサー又はプロセッサ間の不調和の場合にすぐに終了させてもよい。比較器は、電子工学分野の当業者に周知のように、電子スイッチ回路あるいは少なくとも一つのパワーベースプロセッサ上で実行するソフトウェアを用いて、あらゆる誤ったプロセッサ又はセンサーのシリアルバス45、58、及び60への接続を無能にするために提供される。例えば、作動の一モードでは、パワーアンプ制御部(PAC)は、パワーベースプロセッサ(PBP)A及びPBPのBからの結果を格納する。もし、2つの結果が同じであるならば、PACは、両方が正しいので、PBPのAからの結果を用いる。もし、PBPのAとPBPのB2つの結果が異なるならば、PACは、何をすべきかを指示されるまで1サイクル待つ。PBPのCは、第2のサイクルでそれ自身をシャットダウンするために故障プロセッサに信号を送り、第3のサイクルにおいて、PACは、作動しているPBPからだけ聞き、その命令に従う。
【0020】
安全を保証する重大な構成要素 構成要素の故障が車両の操作が安全に終了するために要求される時間中許容される場合、2重に余剰な構成要素が使用される。この範疇に分類されるセンサーの場合、センサーの一つの故障は、それぞれのセンサーの出力を比較することによって検出される。不一致が検出される場合、車両の操作は、安全に終了させられ、それによって、安全を保証する機能性が提供される。安全を保証する機能性は、典型的に、接地モジュール内の力ハンドル(車両の外部制御のために用いられる)、ブレーキ、及びシート設備と同様に、各モーター51、車輪アンプ46、48、及び50、クラスターアンプ52、並びに、パワーアンプ制御部54及び56のために提供される。
【0021】
故障は、非余剰なセンサーの場合、センサー故障モードに特有なセンサー出力の特徴に基づいて、あるいは予期される性能に比較して、検出される。非余剰センサーは、例えば、シート高符号器を含んでもよい。
【0022】
安全を保証するジョイスティック 図3において、安全を保証するジョイスティック機構が示され、一般に自動的に中心に戻るジョイスティック62を持つ数字60によって示される。標準の電位差計ジョイスティックが、ジョイスティックに取り付けられる装置にドリフト又は「ハードオーバー」状態をおこさせる故障を生じ得るのに対して、ジョイスティック機構60は、ジョイスティック62が中心位置にあるときを検出する独立した手段を提供する。例えば、ホール効果センサーであってもよいセンサー64は、センサー64との位置合わせにおいて、ジョイスティック柱66が中心位置であるときを感知する。電位差計68及び70は、2つの直交軸に関してジョイスティック62の位置を感知する。電位差計68及び70のいずれかに故障が起こる場合、もし、ジョイスティック60が解放されているならば、それが自動的に中心に戻るジョイスティックであるので、ジョイスティック60は、中心に戻り、センサー64とかみ合い、それによって、故障の電位差計システムから独立しているシステムに信号を供給する。
【0023】
付随する操作制限 上述のような構成要素の故障の検出に加えて、本発明の代わりの実施の形態において、車両の占有者の安全を提供するために、追加の制御部特性が与えられてもよい。米国特許第5,701,965号及び米国特許出願番号第08/384,705号に記述されるような車両制御の種々のモードでは、トルクは、ユーザー入力又は車両バランスのような内部制御目標によって決定される特定の制御目標を達成するために、クラスター又は車輪の適切なセットに適用される。車両の車輪が地面との接触を一時的に失う場合、浮揚している車輪の回転は、地面に関して車両位置の確かな一定量ではなく、車輪へのトルクの適用を制御することにおける車輪の回転効果は、これらの状況下における車輪の加速を効果的に制限して、制限されなければならない。
【0024】
スピードを制限するための追加の基部は、十分な予備トルクが常に車両の安定性を維持するために利用可能なように、残存するバッテリー容量又は空き高への言及を含む。さらに、もし、モーターがパワー再生のために用いられるならば、斜面を下るときにバッテリーの過充電を防ぐために車両のスピードが制限されてもよい。同様に、分路調整器の散逸要求は、下っている車両の最大スピードを減速することによって減少し得る。それに加えて、車両速度は、横安定性制約に従ってシート高を基礎として制限されてもよい。スピード制限に加えて、車両の操作のモードは、上述のように得られる故障データを基礎にして制限されてもよい。
【0025】
本発明の記述される実施の形態は、単に例示的であると意図され、非常に多くの変形及び改良は、当業者にとって明白である。すべての変形及び改良は、添付される特許請求の範囲に定義されるように、本発明の範囲内であるように意図される。
【図面の簡単な説明】
【0026】
【図1】図1は、本発明の一実施の形態が有利に使用され得るタイプの先行技術の個人的乗物の側面図である。
【図2】図2は、本発明の好ましい実施の形態における個人的乗物を制御するための制御構造のブロック図である。
【図3】図3は、本発明の一実施の形態におけるフェイルセーフジョイスティックの斜視図である。
【特許請求の範囲】
【請求項1】
安全を保証するジョイスティックであって、
a.ユーザーによって解放されるとき、中心位置に前記ジョイスティックを戻すセンタリング機構と、
b.前記中心位置において前記ジョイスティックを検出するためのセンサーと、 を備えることを特徴とする安全を保証するジョイスティック。
【請求項2】
車両の移動を制御するための方法であって、
a.複数の制御チャネルを供給するステップであって、各制御チャネルは、前記車両を進ませるモーター駆動を独立して制御することができる、供給ステップと、
b.複数のプロセッサを供給するステップであって、各プロセッサは、システムバスによって前記制御チャネルのそれぞれに出力を供給する、供給ステップと、
c.前記プロセッサの出力を比較するステップと、
d.いずれかの欠陥プロセッサを識別するステップと、
e.識別された欠陥プロセッサ以外のプロセッサの出力を基礎にして、前記車両を制御するステップと、 を有することを特徴とする方法。
【請求項1】
安全を保証するジョイスティックであって、
a.ユーザーによって解放されるとき、中心位置に前記ジョイスティックを戻すセンタリング機構と、
b.前記中心位置において前記ジョイスティックを検出するためのセンサーと、 を備えることを特徴とする安全を保証するジョイスティック。
【請求項2】
車両の移動を制御するための方法であって、
a.複数の制御チャネルを供給するステップであって、各制御チャネルは、前記車両を進ませるモーター駆動を独立して制御することができる、供給ステップと、
b.複数のプロセッサを供給するステップであって、各プロセッサは、システムバスによって前記制御チャネルのそれぞれに出力を供給する、供給ステップと、
c.前記プロセッサの出力を比較するステップと、
d.いずれかの欠陥プロセッサを識別するステップと、
e.識別された欠陥プロセッサ以外のプロセッサの出力を基礎にして、前記車両を制御するステップと、 を有することを特徴とする方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2009−187561(P2009−187561A)
【公開日】平成21年8月20日(2009.8.20)
【国際特許分類】
【出願番号】特願2009−71887(P2009−71887)
【出願日】平成21年3月24日(2009.3.24)
【分割の表示】特願2000−577062(P2000−577062)の分割
【原出願日】平成11年9月27日(1999.9.27)
【出願人】(594010009)デカ・プロダクツ・リミテッド・パートナーシップ (62)
【Fターム(参考)】
【公開日】平成21年8月20日(2009.8.20)
【国際特許分類】
【出願日】平成21年3月24日(2009.3.24)
【分割の表示】特願2000−577062(P2000−577062)の分割
【原出願日】平成11年9月27日(1999.9.27)
【出願人】(594010009)デカ・プロダクツ・リミテッド・パートナーシップ (62)
【Fターム(参考)】
[ Back to top ]