
個人識別情報検出用光ディスク装置と個人識別情報を用いたコンテンツ記録・再生システム
【課題】光ディスク装置において、指紋などの個人識別情報を検出する。
【解決手段】球面収差補正レンズ118、欠陥検出手段148、欠陥マッピング手段150を備え、光ディスク102の表面206に球面収差を合わせ、表面206にフォーカスを制御することで、個人識別情報106に対する検出分解能が向上し、個人識別情報106の検出ができる。
【解決手段】球面収差補正レンズ118、欠陥検出手段148、欠陥マッピング手段150を備え、光ディスク102の表面206に球面収差を合わせ、表面206にフォーカスを制御することで、個人識別情報106に対する検出分解能が向上し、個人識別情報106の検出ができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は光ディスクの表面に付いた個人を識別する情報(個人識別情報)を検出する光ディスク装置、および個人識別情報を管理するシステムに関するものである。
【背景技術】
【0002】
近年、情報セキュリティーを向上させる目的で、複製が困難である個人に固有な生体情報、例えば指紋、静脈、虹彩を個人識別情報として認証の一部に用いる場合がある。
【0003】
従来の光ディスク装置で、同様に個人識別情報を使った認証を行う場合には、新たに外部機器を用意する必要があり、コストが掛かる。このため、光ディスク装置のみによって個人識別情報を検出できれば有用である。
【0004】
本発明に関連した従来技術として、特許第2531293号公報(特許文献1)がある。
【0005】
特許第2531293号公報に記載の技術では、欠陥の位置を、光ディスクの半径位置と回転角位置でマッピングし、マッピングした半径位置と回転角位置から欠陥塊を検出している。
【0006】
光ディスクからの反射光が欠落する部分を検出し、その長さを求め欠陥の周方向の長さを検出する。次に、ディスクに書かれたディスクフォーマットを再生し、そのディスクフォーマットに基づいて欠陥の種類を判別する。光ディスク回転の1回転につき1発のローテーションパルスと再生されたディスクフォーマットに基づいて欠陥の半径位置と回転角位置を検出する。欠陥の種類、周方向の長さ、半径位置、回転角位置を欠陥データとして、メモリに蓄える。メモリに蓄えた欠陥データに基づいて、その欠陥の半径位置と回転角位置から欠陥塊を検出する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第2531293号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
新たな外部機器を必要とせずに光ディスク装置で個人識別情報を検出する場合、ここでは光ディスクの表面に指紋を付けて、それを光ピックアップで収束させた光スポットで検出する場合について考える。外部機器としての指紋センサには一般的に50um程度の検出分解能が求められることが知られている。
【0009】
しかしながら、従来の構成を個人識別情報の検出に応用しようとしても従来の構成は複数のトラックに渡る欠陥である欠陥塊を検出するものであった。また、欠陥の半径位置と回転角位置を光ディスクのディスクフォーマットに基づいて検出していた。故に、光ディスクの記録層に光スポットを制御する必要があった。記録層に光スポット当てた場合の表面におけるビームの直径はディスクの種類によって異なるが大まかには以下の通りとなる。コンパクトディスク(以下、CDと称す)の場合は約690um、DVDの場合は約520um、Blu−ray Disc(以下、BDと称す)の場合は約140umである。これらは、外部機器の指紋センサに求められる検出分解能に比べると大きい。また、指紋を検出するための欠陥検出方法についても特に言及がない。よって、個人識別情報である指紋を検出するのには十分な性能がない。
【課題を解決するための手段】
【0010】
従来の課題を解決するために、光ディスクの表面に付いた個人識別情報を検出する本発明の光ディスク装置は、前記光ディスクに情報を記録または再生するための光ピックアップと、前記光ディスクからの反射光を光電変換により反射光信号に変換する受光素子と、前記反射光信号に基づいてフォーカス信号を生成するフォーカス信号生成手段と、前記フォーカス信号に基づいて前記光ディスクに光スポットを制御するフォーカス制御信号を生成するフォーカス制御手段と、前記反射光信号に基づいて反射光の光量変化から欠陥を検出し欠陥検出信号を生成する欠陥検出手段と、前記光ディスクの半径位置を検出し半径位置信号を生成する半径位置検出手段と、前記光ディスクの回転角位置を検出し回転角位置信号を生成する回転角位置検出手段と、前記欠陥検出信号と、前記半径位置検出信号と、前記回転位置検出信号とを記憶し欠陥位置を前記光ディスク上の2次元でマッピングする欠陥マッピング手段とを備え、前記欠陥マッピング手段により前記個人識別情報を2次元でマッピングし前記個人識別情報を検出することを特徴とする。
【0011】
また、前記フォーカス制御手段は、前記光ディスクにおける情報が記録された若しくは情報を記録した層とは異なる面であって、前記個人識別情報が付いた前記光ディスクの表面に光スポットを制御することを特徴とする。
【0012】
また、前記光ピックアップは球面収差補正レンズと、球面収差補正レンズ移動手段とをさらに備え、前記球面収差補正レンズが前記光ディスクの表面において球面収差が略ゼロとなるように前記球面収差補正レンズ移動手段を設定することを特徴とする。
【0013】
また、前記光ディスクは情報が記録された若しくは情報を記録するための記録層とをさらに備え、前記フォーカス制御手段は、前記光ディスクの前記記録層に光スポットを制御することを特徴とする。
【0014】
また、前記欠陥検出手段は、ボトムホールド回路を備え、前記反射光信号に基づいた信号を前記ボトムホールド回路に通過させて得られるボトムエンベロープ信号と所定の値とを比較して欠陥検出を行うことを特徴とする。
【0015】
また、前記欠陥検出手段は、モノマルチ回路を備え、前記反射光信号に基づいた信号と所定の値とを比較して欠陥検出をした後にモノマルチ回路に通過させて欠陥検出を所定の時間だけ後ろに延長することを特徴とする。
【0016】
また、前記欠陥検出手段は、トップホールド回路と、ボトムホールド回路を備え、前記反射光信号に基づいた信号を前記トップホールド回路に通過させて得られるトップエンベロープ信号と、前記反射光信号に基づいた信号を前記ボトムホールド回路に通過させて得られるボトムエンベロープ信号と、前記トップエンベロープ信号と前記ボトムエンベロープ信号に基づいて生成される所定の値と、前記反射光信号に基づいた信号と前記所定の値とを比較して欠陥検出を行うことを特徴とする。
【0017】
また、前記フォーカス信号生成手段は光スポットと前記光ディスクの表面または光スポットと記録層との垂直のずれを表すフォーカスエラー信号を生成し、出力することを特徴とする。
【0018】
また、前記フォーカス信号生成手段は前記反射光の光量を表す光量信号を生成し、出力することを特徴とする。
【0019】
また、前記フォーカス制御手段は、前記フォーカス信号に位相補償を施したフォーカス位相補償信号を生成し出力するフォーカス位相補償手段と、前記フォーカス位相補償信号に基づいてフォーカス位相補償信号記憶値を生成し蓄えるフォーカス位相補償信号記憶手段とを備え、前記個人識別情報が付いた領域ではフォーカス位相補償信号記憶値に基づいてフォーカス制御信号を生成することを特徴とする。
【0020】
また、前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースをさらに備え、前記半径位置検出手段は前記トラバースの位置に基づいて半径位置信号を生成することを特徴とする。
【0021】
また、前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、前記トラッキング移動手段の位置に基づいて半径位置信号を生成することを特徴とする。
【0022】
また、前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースとを備え、前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、記半径位置検出手段は前記トラバースの位置と前記トラッキング移動手段の位置に基づいて半径位置信号を生成することを特徴とする。
【0023】
また、前記光ディスクは前記光ディスクの回転角を表す回転角位置パターンを有することを特徴とする。
【0024】
また、前記光ディスク装置を制御するコントローラを備え、前記コントローラが有する内部クロックと、前記回転角位置パターンを前記光ピックアップにより読み取った結果により前記内部クロックを校正し、校正した前記内部クロックに基づいて回転角位置を検出することを特徴とする。
【0025】
また、前記光ディスク装置は前記光ディスクが物理的に有するアドレスを再生するアドレス再生手段とをさらに備え、再生されたアドレスに基づいて欠陥の半径位置および回転角位置を検出することを特徴とする。
【0026】
また、ディスク1回転あたり欠陥が所定の頻度以上である場合は、前記光ディスクの回転を速くすることを特徴とする。
【0027】
また、所定の長さ以上の欠陥がある場合は、前記光ディスクの回転を速くすることを特徴とする。
【0028】
また、ユーザーが前記個人識別情報の検出の開始を指令することを特徴とする。
【0029】
また、前記光ディスクは物理情報領域と、前記物理情報領域は前記光ディスクが前記個人識別情報を付けても良い光ディスクか否かを表す情報である個人識別情報用光ディスク識別子とをさらに備え、前記個人識別情報用光ディスク識別子の有無に基づいて、前記個人識別情報の検出の開始を判断することを特徴とする。
【0030】
また、前記個人識別情報の検出を開始した後に、前記個人識別情報が付いた領域である個人識別情報領域を探索することを特徴とする。
【0031】
また、前記光ディスクが書き込み可能な記録型光ディスクであって、前記個人識別情報が付いた領域である個人識別情報領域の位置が前記記録型光ディスクに記録されたことを特徴とする。
【0032】
また、前記個人識別情報領域の位置に基づいて、前記欠陥マッピング手段はマッピングを開始することを特徴とする。
【0033】
また、前記個人識別情報を付ける領域である個人識別情報エリアが光ディスク上に明示されたことを特徴とする。
【0034】
また、前記個人識別情報エリアに基づいて、前記欠陥マッピング手段はマッピングを開始することを特徴とする。
【発明の効果】
【0035】
本発明の光ディスク装置を用いることで、光ディスクの表面に光スポットを制御し、表面にあたる光スポットの大きさを50umよりも十分に小さくし、個人識別情報の検出が可能になる。
【0036】
また、表面に光スポットを制御した場合に好適な欠陥検出の方法を用いることで、個人識別情報の検出性能が向上する。
【0037】
また、検出した個人識別情報に基づいてコンテンツを暗号化し、光ディスクに記録することで、コンテンツのセキュリティーが向上する。
【図面の簡単な説明】
【0038】
【図1】本発明の実施の形態1、実施の形態2、実施の形態3における光ディスク装置を示す図
【図2】光ディスク102の構成を示す図
【図3】フォーカス制御手段138の構成を示す図
【図4】トラッキング制御手段142の構成を示す図
【図5】表面206にフォーカス制御した場合に現れる光量変化と欠陥検出手段148での欠陥検出方法を示す図
【図6】回転角位置パターン106の例と検出パターンを示す図
【図7】欠陥マッピング手段150が生成する欠陥の2次元マッピングを示す図
【図8】本発明の実施の形態1における動作を示すフローチャート
【図9】フォーカスアップ動作時に現れるフォーカスエラー信号を示す図
【図10】フォーカス制御手段1002の構成を示す図
【図11】本発明の実施の形態2における動作を示すフローチャート
【図12】本発明の実施の形態3における動作を示すフローチャート
【図13】本発明の実施の形態4における光ディスク装置を示す図
【図14】本発明の実施の形態4における動作を示すフローチャート
【図15】フォーカスエラー信号の対称性を表す図
【図16】記録層204にフォーカス制御した場合に現れる光量変化と欠陥検出手段148での欠陥検出方法を示す図
【図17】本発明の実施の形態5における光ディスク装置を示す図
【図18】本発明の実施の形態5における動作を示すフローチャート
【図19】本発明の実施の形態6における光ディスク装置を示す図
【図20】表面206にフォーカス制御した場合に現れるフォーカスエラー信号と欠陥検出手段1904での欠陥検出方法を示す図
【図21】欠陥マッピング手段1906が生成する欠陥の2次元マッピングを示す図
【図22】本発明の実施の形態7における光ディスク記録装置の記録動作を示すフローチャート
【図23】本発明の実施の形態7における光ディスク記録装置を示す図
【図24】本発明の実施の形態7における光ディスク再生装置の再生動作を示すフローチャート
【図25】本発明の実施の形態7における光ディスク再生装置を示す図
【図26】指紋の概念図と特徴点リストの形態を示す図
【図27】表面206にフォーカス制御した場合に現れる光量変化と欠陥検出手段148での欠陥検出方法を示す図
【図28】表面206にフォーカス制御した場合に現れる光量変化と欠陥検出手段148での欠陥検出方法を示す図
【図29】光ディスク102の構成を示す図
【発明を実施するための形態】
【0039】
以下、本発明を実施するための最良の形態について、図面を用いて説明する。
【0040】
(実施の形態1)
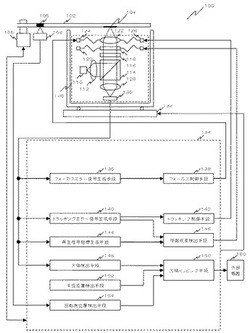
図1は本発明の実施の形態1に係る光ディスク装置100の構成を示したブロック図である。
【0041】
実施の形態1に係る光ディスク装置100は、球面収差を表面206に適して補正し、表面206にフォーカス制御を行い、表面206に付けた個人識別情報104を検出する。
【0042】
光ディスク102の表面206に個人識別情報104が付いている。個人識別情報104は個人を識別するための情報であり、例えば指紋や筆跡である。本発明は個人識別情報104が指紋である場合を代表して記載する。個人識別情報104が付いた光ディスク102上の領域を個人識別情報領域と称す。光ディスク102の内周部分には回転角位置パターン106がある。回転角位置パターン106は光ディスク102の絶対的な回転角位置を表す。
【0043】
光ディスク102の例を図2に示す。
【0044】
図2(a)は光ディスク102の層構成を表す図である。レーベル面202、記録層204、表面206から成る。記録層204は情報が記録された層、若しくは情報を記録する層である。一般的な光ディスク装置は記録層204から光スポットにより情報を再生または記録する。表面206は記録層204から情報を再生または記録する場合に光が入射する面である。レーベル面202は表面206と反対に位置する。レーベル面202は、主に図柄を印刷するのに用いられる面である。なお、個人識別情報104を付けるのは表面206とレーベル面202のどちらでも良く、本発明は個人識別情報104を表面206に付けた場合を代表として記載する。
【0045】
図2(b)は表面206側から光ディスク102を見た図である。なお、レーベル面202に個人識別情報104を付ける場合は、例えばライトスクライブ(LightScribe)に用いられるディスクのように、レーベル面202で光を反射しなければならない。
【0046】
図2(c)は光ディスク102の別の形態である光ディスク208である。光ディスク208には、物理情報領域210を備える。物理情報領域210は一般的な光ディスクに備わっており、記録層204に配置され、ディスクの種類などの情報が書かれた領域である。物理情報領域210の中には光ディスク208が個人識別情報104を付けて良い光ディスクか否かを表す情報が記録されている。なお、光ディスク208の記録層206が記録可能な場合には、個人識別情報104の有無や個人識別情報領域の位置を記録しても良い。
【0047】
図2(d)は光ディスク102の別の形態である光ディスク212である。光ディスク212には、個人識別情報領域を個人識別情報エリア214として明示してある。個人識別情報エリア214に個人識別情報104を付ける。
【0048】
図2(e)は光ディスク102の別の層構成である光ディスク216を表す図である。光ディスク216は、レーベル面202、表面206から成る。光ディスク216は記録層204を持たず、個人識別情報104を付けるのに特化した光ディスクである。なお、光ディスク216は、回転角位置パターン106や個人識別情報エリア214を備えても良い。
【0049】
回転角位置パターン106は回転角位置パターン検出手段158によって、回転角位置パターン106のパターンが検出される。回転角位置パターン検出手段158は検出したパターンを回転角位置パターン検出信号として出力する。
【0050】
光ピックアップ108は、光源110、カップリングレンズ112、偏光ビームスプリッタ114、1/4波長板116、球面収差補正レンズ118、球面収差補正レンズ移動手段120、対物レンズ122、フォーカス移動手段124、トラッキング移動手段126、集光レンズ128、受光手段130から成る。
【0051】
光源110は拡散光を出射する素子である。光ディスクの場合では半導体レーザが広く用いられ、CDでは略780nm、DVDでは略650nm、BDでは略405nmの波長である半導体レーザが用いられる。光源110から出射された光はカップリングレンズ112によって平行光にされる。カップリングレンズ112を通過した光は偏光ビームスプリッタ114で反射される。偏光ビームスプリッタ114で反射した光は1/4波長板を通過して円偏光される。1/4波長板116を通過した光は、球面収差補正レンズ118を通過し光の球面収差が補正される。球面収差補正レンズ118は球面収差補正レンズ移動120によって移動する。球面収差補正レンズ118は表面206までの球面収差を補正できる。球面収差補正レンズ移動手段120は表面206までの球面収差を補正できるストロークを持つ。これにより、表面206でも良好なフォーカスエラー信号が得られ制御が安定となる。なお、光源110が複数の波長を有する場合は、少なくとも1つの波長に対して表面206まで球面収差を補正できるストロークを有し、その波長の光源110によって個人識別情報104を検出する。球面収差補正レンズ118を通過した光は対物レンズ122によって収束され光スポットが形成される。対物レンズ122はフォーカス移動手段124によって光ディスク102の略垂直方向に移動する。対物レンズ122はトラッキング移動手段126によって光ディスク102の略水平方向に移動する。なお、トラッキング移動手段126は数百umのストロークを有する。
【0052】
対物レンズ122によって形成された光スポットが光ディスク102で反射した光は、対物レンズ122、球面収差補正レンズ118、1/4波長板116を通過して直線偏光され、偏光ビームスプリッタ114を通過する。偏光ビームスプリッタ114を通過した光は集光レンズ128で集光される。集光レンズ128で集光した光は受光素子130で受光される。受光手段130は受光した光を光電変換によって電気信号に変換し、反射光信号を出力する。光電素子130は種々の信号を生成するために、複数の素子に分割されている。反射光信号はコントローラ134に入力される。コントローラ134は光ディスク装置100を制御するLSIである。
【0053】
光ピックアップ108は、トラバース132によって光ディスク102に略水平方向に移動する。トラバース132は、リードスクリュー(図示しない)とモータ(図示しない)とから成る。リードスクリュー(図示しない)をモータ(図示しない)により回転させることで直線運動を実現し、光ピックアップ108が略水平方向に移動する。トラバース132は、コントローラ134が出力するトラバース制御信号に従って制御される。トラバース制御信号はコントローラ134が管理するトラバースの現在位置とコントローラ134が計算する目標位置から駆動パルスを生成することで実現される。
【0054】
ディスクモータ156は光ディスク102を所定の回転数で回転させる。ディスクモータ156に備えた回転数センサ(図示しない)により回転数を検出し、回転数に応じてディスク1回転に数個のパルスを発生するFG信号がコントローラ134に入力される。コントローラ134は、FG信号と目標回転数に基づいて所望の回転数になるように回転数制御信号を生成し、回転数制御信号がディスクモータ156に入力される。
【0055】
コントローラ134は、フォーカスエラー信号生成手段136、フォーカス制御手段138、トラッキングエラー信号生成手段140、トラッキング制御手段142、再生信号指標生成手段144、球面収差検出手段146、欠陥検出手段148、欠陥マッピング手段150、半径位置検出手段152、回転角位置検出手段154から構成される。
【0056】
反射光信号はフォーカスエラー信号生成手段136、トラッキングエラー信号生成手段140、再生信号指標生成手段144、欠陥検出手段148に入力される。
【0057】
フォーカスエラー信号生成手段136の出力であるフォーカスエラー信号はフォーカス制御手段138に入力される。フォーカス制御手段138の出力であるフォーカス制御信号はフォーカス移動手段124に入力される。
【0058】
トラッキングエラー信号生成手段140の出力であるトラッキングエラー信号はトラッキング制御手段142と球面収差検出手段146に入力される。トラッキング制御手段142の出力であるトラッキング制御信号はトラッキング移動手段126に入力される。
【0059】
再生信号指標生成手段144の出力である再生信号指標信号は球面収差検出手段146に入力される。
【0060】
欠陥検出手段148の出力である欠陥検出信号は欠陥マッピング手段150に入力される。
【0061】
球面収差検出手段146の出力である球面収差制御信号は球面収差補正レンズ移動手段120に入力される。
【0062】
半径位置検出手段152の出力である半径位置検出信号は欠陥マッピング手段150に入力される。
【0063】
回転角位置検出手段154の出力である回転角位置検出信号は欠陥マッピング手段150に入力される。
【0064】
欠陥マッピング手段150の出力である欠陥マッピング信号は外部機器160へ入力される。外部機器160とは、例えばホストコンピュータである。
【0065】
フォーカスエラー信号生成手段136は、入力信号からフォーカスエラー信号を生成し、出力する。フォーカスエラー信号は、光スポットと表面206との垂直方向のずれ、または光スポットと記録層204との垂直方向のずれを表す信号であり、非点収差法といった検出法を用いて実現できる。
【0066】
フォーカス制御手段138は、入力信号からフォーカス制御信号を生成し、出力する。フォーカス制御手段138の例を図3に示す。フォーカス制御手段138は、フォーカスON/OFFスイッチ302、フォーカス位相補償フィルタ304、フォーカス制御信号オフセット手段306、加算器308から成る。フォーカスON/OFFスイッチ302がフォーカスON(スイッチが入力信号の方に倒れた場合)では、入力信号に基づいて光スポットの垂直方向が目標位置へ収束するように、入力信号に応じた目標レベルを設定し、目標レベルと入力信号との差分である誤差信号にフォーカス位相補償フィルタ304により位相補償を施し、フォーカス位相補償信号を生成し、出力する。フォーカス制御信号オフセット手段306はフォーカス制御信号オフセットを設定できる。加算器308はフォーカス位相補償信号とフォーカス制御信号オフセットを加算し、フォーカス制御信号を出力する。フォーカスOFFの場合では、光スポットの垂直方向の目標位置への制御は行わない。フォーカスOFFの場合では、フォーカス制御信号オフセットを適切に増加させると、光スポットは光ディスク102の垂直方向に近づきフォーカスアップ動作ができる。また、フォーカスOFFの場合では、フォーカス制御信号オフセットを適切に減少させると、光スポットは光ディスク102の垂直方向に遠のきフォーカスダウン動作ができる。
【0067】
トラッキングエラー信号生成手段140は、入力信号からトラッキングエラー信号を生成し、出力する。トラッキングエラー信号は光スポットと記録層204上のトラック中心とのずれを表す信号であり、差動プッシュプル法といった検出法を用いて実現できる。
【0068】
トラッキング制御手段142は、入力信号からトラッキング制御信号を生成し、出力する。トラッキング制御手段142の例を図4に示す。トラッキング制御手段142は、トラッキングON/OFFスイッチ402、トラッキング位相補償フィルタ404、トラッキング制御信号オフセット手段406、加算器408から成る。トラッキングON/OFFスイッチ402がトラッキングON(スイッチが入力信号の方に倒れた場合)では、入力信号に基づいて光スポットの水平方向が目標位置へ収束するように、入力信号に応じた目標レベルを設定し、目標レベルと入力信号との差分である誤差信号にトラッキング位相補償フィルタ404により位相補償を施し、トラッキング位相補償信号を生成し、出力する。トラッキング制御信号オフセット手段406はトラッキング制御信号オフセットを設定できる。加算器408は、トラッキング位相補償信号とトラッキング制御信号オフセットを加算し、トラッキング制御信号を出力する。トラッキングOFFの場合では、光スポットの水平方向の目標位置への制御は行わない。トラッキングOFFの場合では、トラッキング制御信号オフセットを所定の量だけ加えると、光スポットが光ディスク102の水平方向に所定の量だけ移動する。
【0069】
再生信号指標生成手段144は、入力信号から再生信号指標信号を生成し、出力する。再生信号指標信号とは再生信号の振幅や再生信号のジッタなど、再生信号の品質を表すものである。
【0070】
球面収差検出手段146は、入力信号に基づいて、球面収差が好適になるように球面収差制御信号を生成し、出力する。球面収差が好適であるとは、例えばトラッキングエラー信号の振幅が最大となる場合や、再生信号指標信号のうち再生信号の振幅が最大となる場合である。
【0071】
球面収差を表面206に合わせる方法としては、球面収差補正レンズ118の位置を光ピックアップ108の表面206における設計中心に合わせる方法がある。別の方法としては、記録層204において球面収差を球面収差検出手段146で検出し球面収差制御信号を生成し、記録層204における球面収差制御信号に基づいて表面206における球面収差制御信号を求める方法である。球面収差は基材厚(表面206から記録層204までの距離)に比例するので、記録層204における球面収差制御信号と基材厚から表面206における球面収差を求めることができる。なお、基材厚は図9に示すように、フォーカスアップ動作によりフォーカスエラー信号のゼロクロスの間隔Lを測定することで求められる。なお、基材厚は例えば規格で決まっている所定の値を使っても良い。
【0072】
欠陥検出手段148は、反射光信号の全てまたは一部の和から反射光量を求め、反射光量が低下する欠陥があるか否かを検出する。欠陥の有無は欠陥検出信号として出力する。欠陥検出手段148の出力信号の例を図5,図27,図28に示す。図5,図27,図28は反射光量と、反射光量から欠陥の有無を検出する欠陥検出閾値と、欠陥検出信号を表す。図5,図27,図28では表面206にフォーカスを制御している場合である。光スポットが指紋の上を通過すると反射光量はパルス状に変化する。これは、ミクロ的に見ると指紋が数um程度の水滴や油滴によって構成されているためである。対して、表面206における光スポットが水滴や油滴よりも小さいため、水滴や油滴を検出してパルス状の信号となる。
【0073】
図5は反射光量を所定の欠陥検出閾値を用いて欠陥検出信号を生成した場合を表す。指紋はマクロ的に見ると凹凸により紋様を作り出し、領域502や領域504は指紋での1つ1つの凸部に対応する。凸部に対応して領域502と領域504でそれぞれ1つの欠陥が検出されることが期待される。しかしながら、図5においては、領域502や領域504で複数個の欠陥が検出されている。これでは、個人識別情報104の検出ができない。
【0074】
個人識別情報104を検出する方法として、ボトムホールド回路(図示しない)を設ける方法がある。
【0075】
図27は反射光量と、ボトムエンベロープ信号と、欠陥検出信号を示す。ボトムエンベロープ信号は、反射光量をボトムホールド回路(図示しない)に通すことで生成できる。欠陥検出信号はボトムエンベロープ信号と所定の欠陥検出閾値を比較して生成できる。
【0076】
図527では領域502と領域504でそれぞれ1回だけ欠陥を検出している。つまり、指紋の1つ1つの凸部を検出できる。なお、ボトムホールド回路(図示しない)のアタックゲインは、個人識別情報104の特徴(例えば指紋では水滴や油滴の大きさ、凸部の間隔)と光ディスク102の回転数とスポットが位置する半径位置から適切に求めれば良い。
【0077】
また、個人識別情報104を検出する別の方法として、モノマルチ回路(図示しない)を設ける方法がある。
【0078】
図28は反射光量と、モノマルチ回路を通過する前の信号、モノマルチ回路を通過した後の信号を示す。モノマルチ回路を通過する前の信号は、反射光量と所定の欠陥検出閾値を比較して生成でき、図5に示した欠陥検出信号と同じである。モノマルチ回路を通過した後の信号は、モノマルチ回路を通過する前の信号の立下りから所定の時間Δだけ後ろに延長して生成でき、この信号を欠陥検出信号とする。
【0079】
図528では領域502と領域504でそれぞれ1回だけ欠陥を検出している。つまり、指紋の1つ1つの凸部を検出できる。なお、所定の時間Δは、個人識別情報104の特徴(例えば指紋では水滴や油滴の大きさ、凸部の間隔)と光ディスク102の回転数とスポットが位置する半径位置から適切に求めれば良い。
【0080】
欠陥検出手段148を個人識別情報104に適した構成と設定をすることで、図27や図28のように個人識別情報104を欠陥として検出することが可能となる。
【0081】
半径位置検出手段152は、コントローラ134が管理するトラバースの現在位置とトラッキング制御信号オフセットから光スポットの半径位置を計算する。計算した半径位置は半径位置検出信号として出力する。
【0082】
回転角位置検出手段156は、回転角位置パターン106から光ディスク102の絶対的な回転角位置を検出する。回転角位置パターン106の例を図6に示す。回転角位置パターン106は不均一なパターンから構成され、そのパターンの並び方によって回転角位置が表現されている。なお、回転角位置を表現できれば、回転角位置パターン106は図6以外の別の形態を取っても良い。回転角位置パターン106は、回転角位置パターン検出手段158によって検出され、回転角位置パターン検出信号が出力される。回転角位置パターン検出手段158は、例えば反射型フォトセンサによって実現できる。回転角位置検出手段156は、回転角位置パターン検出信号を2値化し、デコードすることで回転角位置を検出する。検出した回転角位置は回転角位置検出信号として出力する。なお、回転角位置パターン106を光ピックアップ108で読み取り、その結果でコントローラ134の内部クロックを校正し、校正した内部クロックに基づいて回転角位置の検出を行っても良い。なお、内部クロックに代わって、FG信号を用いても良い。なお、回転角位置パターン106が表す回転角位置は光ディスク102の絶対値でも、相対値でも良い。相対値の場合は、別の信号、例えば内部クロックを用いることで、絶対値に変換すれば良い。
【0083】
欠陥マッピング手段150は、欠陥検出信号、半径位置検出信号、回転角位置検出信号に基づいて、欠陥が検出された半径位置と回転角位置を蓄え、欠陥を2次元でマッピングする。マッピングした欠陥マッピング情報を欠陥マッピング信号として出力する。本発明は個人識別情報104として指紋を代表して記載しており、欠陥マッピング情報とは、すなわち指紋マッピング情報である。
【0084】
欠陥マッピング手段150がマッピングした個人識別情報104の例を図7に示す。図7(a)では欠陥が○部で検出される。欠陥マッピング手段150は図7(b)のように○部の半径位置と回転角位置を蓄え、2次元でマッピングする。なお、半径位置と回転角位置を蓄える機能は、その全部または一部を外部機器160へ置いても良い。
【0085】
以上の構成において実施の形態1に係る光ディスク装置100について図8を参照して説明する。図8は、球面収差を表面206に適して補正し、表面206にフォーカス制御を行い、表面206に付けた個人識別情報104を検出する方法のフローチャートである。
【0086】
この方法において、個人識別情報104を検出する処理が開始されると(S802)、個人識別情報104を読み取る必要があるか否かを判断する(S804)。個人識別情報104を読み取る必要があると判断されたなら、球面収差補正レンズ移動手段120は球面収差を表面206に合わせる(S806)。S804において個人識別情報104を読み取る必要がないと判断されたら、処理を終了する(S826)。球面収差を合わせた後に、フォーカス制御手段138は光スポットを表面206に制御する(S808)。光スポットを表面206に制御した後に、個人識別情報領域を探索する(S810)。探索した後に、個人識別情報領域の始端に移動する(S812)。移動した後に、欠陥検出手段148により欠陥の有無を検出し(S814)。欠陥を検出したら、欠陥マッピング手段150は半径位置検出信号により半径位置を記憶し(S816)、回転角位置検出信号により回転角位置を記憶する(S818)。光ディスク102の1回転分でS814からS818を繰り返す(S820)。1回転分の欠陥のマッピングが終了した後に、トラッキング移動手段126またはトラバース132により半径位置を移動する(S822)。なお、移動する距離は50um程度にすると良い。個人識別情報領域の欠陥のマッピングが終了していない(個人識別情報領域の終端に到達していない)場合は、S814に戻る(S824)。終了している場合は、処理を終了する(S826)。
【0087】
S804において、個人識別情報104を読み取る必要があるか否かの判断は方法としては、ユーザーが指定する方法がある。別の方法としては、光ディスク208のように個人識別情報104を付けても良い光ディスクか否か判別する情報が物理情報領域210に記録されている場合には、物理情報領域210を再生して判別する方法がある。
【0088】
S810において、個人識別情報領域を探索する方法としては、トラバース132を光ディスク102の内周から外周まで数mm程度の刻み幅で略水平方向に移動させ、ディスク1回転に現れる欠陥の頻度を検出する方法がある。別の方法としては、光ディスク102に個人識別情報領域が記録されていれば、それが個人識別領域の探索結果となる。別の方法としては、個人識別情報エリア214が設けられている場合は、それが個人識別領域の探索結果となる。
【0089】
S812において、個人識別情報領域を始端に移動する方法としては、トラバース132により光ピックアップ108を略水平方向に移動させる方法がある。
【0090】
以上のように、実施の形態1の光ディスク装置100によれば、個人識別情報104を検出できる。検出された個人識別情報104は2次元の欠陥位置を表す。これに従来からの指紋の特徴点検出を行うと、特徴点が分かり個人を特定できる。特定された個人に基づいて、例えばコンテンツを暗号化し、光ディスク102に暗号化されたコンテンツを記録すれば、光ディスク102に記録されたコンテンツのセキュリティーが向上される。また、表面206にフォーカスを制御するにあたり、球面収差補正レンズ移動手段120のストロークを表面206にまで持たせ球面収差を表面206に合わせることができる。これにより、フォーカスエラー信号の品質が確保でき制御の安定性が向上される。
【0091】
なお、記録層204に球面収差を合わせて、記録層204に光スポットを制御して、同様な処理を行っても、個人識別情報104を検出できる。図16は記録層204にフォーカスを制御した場合における欠陥検出手段148の例を示す。図16は反射光量と、反射光量から欠陥の有無を検出する欠陥検出閾値と、欠陥検出信号を表す。図16は記録層204にフォーカスを制御している場合である。光スポットを指紋の上を通過すると反射光量はパルス状に変化する。
【0092】
図16(a)は反射光量を所定の欠陥検出閾値を用いて欠陥検出信号を生成した場合を表す。指紋はマクロ的に見ると凹凸により紋様を作り出し、領域1602、領域1604、領域1606は指紋での1つ1つの凸部に対応する。凸部に対応して領域1602、領域1604、領域1606でそれぞれ1つの欠陥が検出されることが期待される。しかしながら、図16(a)においては、領域1602で欠陥が検出できていない。これでは、個人識別情報104の検出ができない。
【0093】
図16(b)は反射光量をトップホールド回路(図示しない)に通しトップエンベロープ信号を検出する。また、反射光量をボトムホールド回路(図示しない)によりボトムエンベロープ信号を検出する。トップエンベロープ信号とボトムエンベロープ信号の平均値で欠陥検出閾値を生成し、反射光量と比較して欠陥検出信号を生成した場合である。なお、トップホールド回路(図示しない)のドループゲインやボトムホールド回路(図示しない)のアタックゲインは、個人識別情報104の特徴(例えば指紋では水滴や油滴の大きさ、凸部の間隔)と光ディスク102の回転数とスポットが位置する半径位置から適切に求めれば良い。
【0094】
(実施の形態2)
本発明の実施の形態2に係る光ディスク装置は図1における光ディスク装置100と同じ構成なので説明を省略する。また、前述した実施の形態1と同じ構成については、同じ符号を付し説明を省略する。
【0095】
実施の形態2に係る光ディスク装置100は、個人識別情報領域の近傍で記憶したフォーカス位相補償信号に基づいて個人識別情報領域でフォーカス制御を行う。
【0096】
実施の形態2におけるフォーカス制御手段1002を図10に示す。フォーカス制御手段1002はフォーカスON/OFFスイッチ302、フォーカス位相補償フィルタ304、フォーカス制御信号オフセット手段306、加算器308、及びフォーカス位相補償信号記憶ON/OFFスイッチ1004、フォーカス位相補償信号記憶手段1006、フォーカス制御信号切換手段1008から成る。
【0097】
フォーカス制御信号記録ON/OFFスイッチ1004は、フォーカス位相補償信号をフォーカス位相補償信号記憶手段1006に入力するか否かを制御する。
【0098】
フォーカス位相補償信号記憶手段1006は、フォーカス位相補償信号に基づいてフォーカス位相補償信号記憶値を生成する。フォーカス位相補償信号記憶値はフォーカス位相補償信号記憶信号として出力する。
【0099】
フォーカス制御信号切換手段1008は、フォーカス位相補償信号とフォーカス位相補償信号記憶信号のうち何れか1つを選択して出力する。
【0100】
加算器308は、フォーカス位相補償信号とフォーカス位相補償信号記憶信号のうち何れか1つとフォーカス制御信号オフセットを加算し、フォーカス制御信号を出力する。
【0101】
フォーカス位相補償信号記憶手段1006はフォーカス位相補償信号記憶値を記憶する場合には、フォーカス制御信号記憶ON/OFFスイッチ1004をONにする。フォーカス位相補償信号記憶手段1006は、例えばコントローラ134の内部クロックからディスク1回転をN個の区間に分割する区間分割信号を生成する。区間分割信号に基づいて各々の区間で区間の開始から終了まで位相補償フィルタ信号を所定のフィルタに通し、その区間の終了時の結果をフォーカス位相補償信号記憶値として記憶する。フォーカス位相補償信号記憶手段1006はフォーカス位相補償信号記憶信号を出力する場合には、フォーカス制御信号記憶ON/OFFスイッチ1004をOFFに、フォーカス制御信号切換手段1008をフォーカス位相補償信号記録手段1006側に倒す。フォーカス位相補償信号記憶手段1006は、区間分割信号に基づいて区間に応じてフォーカス位相補償信号記憶値をフォーカス位相補償信号記憶信号として出力する。
【0102】
以上の構成において、実施の形態2に係る光ディスク装置100について図11を参照して説明する。図11は個人識別情報領域の近傍においてフォーカス位相補償記憶信号を記録し、個人情報識別領域においてフォーカス位相補償信号記憶信号を用いてフォーカス制御を行い、表面206に付けた個人識別情報104を検出する方法のフローチャートである。
【0103】
この方法において、個人識別情報104を検出する処理が開始されると(S802)、個人識別情報104を読み取る必要があるか否かを判断する(S804)。個人識別情報104を読み取る必要があると判断されたなら、球面収差補正レンズ移動手段120は球面収差を表面206に合わせる(S806)。S804において個人識別情報104を読み取る必要がないと判断されたら、処理を終了する(S826)。球面収差を合わせた後に、フォーカス制御手段138は光スポットを表面206に制御する(S808)。光スポットを表面206に制御した後に、個人識別情報領域を探索する(S810)。探索した後に、個人識別情報の近傍に移動する(S1102)。近傍に移動した後に、フォーカス位相補償記憶値を生成し、記憶する(S1104)。記憶した後に、個人識別情報領域の始端に移動する(S812)。移動した後に、フォーカス制御信号切換手段1008はスイッチをフォーカス位相補償信号記憶手段1006側に倒し、加算器308の入力をフォーカス位相補償信号記憶信号にする(S1106)。加算器308の入力を切換えた後、欠陥検出手段148により欠陥の有無を検出し(S814)。欠陥を検出したら、欠陥マッピング手段150は半径位置検出信号により半径位置を記憶し(S816)、回転角位置検出信号により回転角位置を記憶する(S818)。光ディスク102の1回転分でS814からS818を繰り返す(S820)。1回転分の欠陥のマッピングが終了した後に、トラッキング移動手段126またはトラバース132により半径位置を移動する(S822)。個人識別情報領域の欠陥のマッピングが終了していない(個人識別情報領域の終端に到達していない)場合は、S814に戻る(S824)。終了している場合は、フォーカス制御信号切換手段1008はスイッチをフォーカス位相補償手段304側に倒し、加算器308の入力をフォーカス位相補償信号にする(S1106)。加算器308の入力を切換えた後、処理を終了する(S826)。
【0104】
以上のように、実施の形態2の光ディスク装置100によれば、個人識別情報領域の近傍で記憶したフォーカス位相補償信号記憶信号に基づいて個人識別情報領域でもフォーカス制御を行うことができる。これにより、個人識別情報104によってフォーカスエラー信号が大きく乱される場合でも、個人識別情報領域での制御の安定性が向上される。
【0105】
(実施の形態3)
本発明の実施の形態3に係る光ディスク装置は図1における光ディスク装置100と同じ構成なので説明を省略する。また、前述した実施の形態1から実施の形態2までと同じ構成については、同じ符号を付し説明を省略する。
【0106】
実施の形態3に係る光ディスク装置100は、個人情報識別領域においてディスク1回転に現れる欠陥の検出頻度に応じてディスクモータ156の回転数を制御する。
【0107】
以上の構成において、実施の形態3に係る光ディスク装置100について図12を参照して説明する。図12は、個人情報識別領域においてディスク1回転に現れる欠陥の検出頻度に応じてディスクモータ156の回転数を制御する方法のフローチャートである。
【0108】
この方法において、個人識別情報104を検出する処理が開始されると(S802)、個人識別情報104を読み取る必要があるか否かを判断する(S804)。個人識別情報104を読み取る必要があると判断されたなら、球面収差補正レンズ移動手段120は球面収差を表面206に合わせる(S806)。S804において個人識別情報104を読み取る必要がないと判断されたら、処理を終了する(S826)。球面収差を合わせた後に、フォーカス制御手段138は光スポットを表面206に制御する(S808)。光スポットを表面206に制御した後に、個人識別情報領域を探索する(S810)。探索した後に、個人識別情報領域の始端に移動する(S812)。移動した後に、欠陥検出手段148により欠陥の有無を検出し(S814)。欠陥を検出したら、欠陥マッピング手段150は半径位置検出信号により半径位置を記憶し(S816)、回転角位置検出信号により回転角位置を記憶する(S818)。光ディスク102の1回転分でS814からS818を繰り返す(S820)。1回転分の欠陥のマッピングが終了した後に、欠陥の検出頻度が所定以上か否かを判別する(S1202)。欠陥の検出頻度が所定以上の場合は、既にディスクモータ156の回転数を上げているか否かを判別する(S1204)。未だ回転数を上げていない場合は、回転数を上げる(S1206)。S1202において欠陥の検出頻度が所定未満の場合、若しくはS1204において欠陥の検出頻度が所定以上であっても既に回転数を上げている場合、若しくはS1206において欠陥の検出頻度が所定以上であって回転数を上げ終わった場合は、トラッキング移動手段126またはトラバース132により半径位置を移動する(S822)。個人識別情報領域の欠陥のマッピングが終了していない(個人識別情報領域の終端に到達していない)場合は、S814に戻る(S824)。終了している場合は、ディスクモータ156の回転数を上げているか否かを判別する(S1208)。上げている場合は、回転数を元に戻す(S1210)。回転数を上げていない場合、若しくは回転数を戻した場合は、処理を終了する(S826)。なお、欠陥の検出頻度以外にも、欠陥の長さが所定以上の場合に同様な処理を行っても良い。
【0109】
以上のように、実施の形態3の光ディスク装置100によれば、ディスク1回転に現れる欠陥の検出頻度に応じてディスクモータ156の回転数を制御することができる。これにより、個人識別情報104による欠陥による外乱が多く制御が大きく揺れる場合であっても、回転数を上げることで外乱の周波数を高くし制御の追従性を悪くすることで、欠陥に振られることなく、個人識別情報領域での制御の安定性が向上される。
【0110】
なお、フォーカス制御のみを行っている場合は、外乱の周波数がフォーカス制御の制御帯域の略10倍以上になるように回転数を設定するのが良い。また、フォーカス制御とトラッキング制御を行っている場合は、外乱の周波数がフォーカス制御の制御帯域とトラッキング制御の制御帯域のうち、何れか高い制御帯域の略10倍以上になるように回転数を設定するのが良い。
【0111】
なお、外乱への制御の追従性を悪くする方法としては、回転数を変更する以外に、フォーカス制御やトラッキング制御の制御帯域を低くしても良い。なお、制御帯域は外乱周波数の10分の1程度にするのが良い。
【0112】
(実施の形態4)
図13は本発明の実施の形態4に係る光ディスク装置1300の構成を示したブロック図である。前述した実施の形態1から実施の形態3までと同じ構成については、同じ符号を付し説明を省略する。
【0113】
実施の形態4に係る光ディスク装置1300は、球面収差を記録層204に適して補正し、表面206にフォーカスを制御し、表面206に付けた個人識別情報104を検出する。
【0114】
光ピックアップ1302は、球面収差補正レンズ1304、球面収差補正レンズ移動手段1306を新たに有する。球面収差補正レンズ1304は、表面206までの球面収差を補正できない。球面収差補正レンズ移動手段1306は、球面収差補正レンズ1304が球面収差を補正できる範囲でのストロークを少なくとも持つ。例えば、球面収差補正レンズ1304が記録層206の近傍のみで球面収差を補正できる場合、球面収差補正レンズ移動手段1306は少なくとも記録層206の近傍のストロークを持てば良い。
【0115】
コントローラ1308は、光量信号生成手段1310と、フォーカス制御手段入力切換手段1312を新たに有する。
【0116】
光量信号生成手段1310は、反射光信号の全てまたは一部の和から光量信号を生成し、出力する。
【0117】
フォーカス制御手段入力切換手段1312は、フォーカスエラー信号と光量信号のうち何れか1つを選択し、フォーカス制御手段138への入力を切換える。
【0118】
フォーカス制御手段138は光スポットの垂直方向が目標位置へ収束するように、入力信号に応じた目標レベルを設定する。目標レベルと入力信号との差分である誤差信号にフォーカス位相補償フィルタ304により位相補償を施し、光スポットを制御する。
【0119】
入力信号が光量信号の場合は、光量信号が一定以上となるように光スポットを制御してもよい。
【0120】
以上の構成において、実施の形態4に係る光ディスク装置1300について、図14を参照して説明する。図14は、球面収差を記録層204に適して補正し、表面206にフォーカスを制御し、表面206に付けた個人識別情報104を検出する方法のフローチャートである。
【0121】
この方法において、個人識別情報104を検出する処理が開始されると(S802)、個人識別情報104を読み取る必要があるか否かを判断する(S804)。個人識別情報104を読み取る必要があると判断されたなら、球面収差補正レンズ移動手段120は球面収差を記録層204に合わせる(S1402)。S804において個人識別情報104を読み取る必要がないと判断されたら、処理を終了する(S826)。球面収差を合わせた後に、表面206でのフォーカスエラー信号の対称性を確認し、フォーカスエラー信号を用いて光スポットを表面206に制御できるか否かを判断する(S1404)。フォーカスエラー信号の対称性が大きい、つまりアンバランスであると制御が不安定となる(図15参照)。フォーカスエラー信号の対称性が所定以上の場合は、フォーカス制御手段入力切換手段1312は、フォーカス制御手段138への入力を光量信号に切換える(S1406)。S1404において、フォーカスエラー信号の対称性が所定未満である場合は、フォーカス制御手段138への入力はフォーカスエラー信号となる。フォーカス制御手段138への入力信号が決まった後に、フォーカス制御手段138は光スポットを表面206に制御する(S808)。光スポットを表面206に制御した後に、個人識別情報領域を探索する(S810)。探索した後に、個人識別情報領域の始端に移動する(S812)。移動した後に、欠陥検出手段148により欠陥の有無を検出し(S814)。欠陥を検出したら、欠陥マッピング手段150は半径位置検出信号により半径位置を記憶し(S816)、回転角位置検出信号により回転角位置を記憶する(S818)。光ディスク102の1回転分でS814からS818を繰り返す(S820)。1回転分の欠陥のマッピングが終了した後に、トラッキング移動手段126またはトラバース132により半径位置を移動する(S822)。個人識別情報領域の欠陥のマッピングが終了していない(個人識別情報領域の終端に到達していない)場合は、S814に戻る(S824)。終了している場合は、処理を終了する(S826)。
【0122】
なお、S1402において、球面収差補正レンズ1304を表面206における球面収差が最良となる位置にしても良い。
【0123】
なお、光ピックアップ108の設計などでフォーカスエラー信号の品質が保障できないと分かっている場合は、S1404の判別を行わず、S1406を実行しても良い。
【0124】
以上のように、実施の形態4の光ディスク装置1300によれば、球面収差補正レンズ1304に表面206までの球面収差を補正できない場合であっても、表面206に光スポットを制御でき、個人識別情報104を検出できる。検出された個人識別情報104は2次元の欠陥位置を表す。これに従来からの指紋の特徴点検出を行うと、特徴点が分かり個人を特定できる。特定された個人に基づいて、例えばコンテンツを暗号化し、光ディスク102に暗号化されたコンテンツを記録すれば、光ディスク102に記録されたコンテンツのセキュリティーが向上される。
【0125】
なお、記録層204にフォーカスを制御した場合に、表面206における光ビームの直径が略50umとなるには、光源110の波長によって以下のような基材厚を持つのが最良である。波長が略780nmの場合は略79um。波長が略650nmの場合は略57um。波長が略405nmの場合は略36um。ただし、これら基材厚の光ディスク102に一般的ではない。一般的な光ディスク102の中では、光ディスク102にBDを、光源110に波長が略780nmのものを組み合わせるのが好適である。
【0126】
(実施の形態5)
図17は本発明の実施の形態5に係る光ディスク装置1700の構成を示したブロック図である。前述した実施の形態1から実施の形態4までと同じ構成については、同じ符号を付し説明を省略する。
【0127】
実施の形態5に係る光ディスク装置1700は、球面収差を記録層204に適して補正し、記録層204にフォーカス制御を行い、記録層204のディスクフォーマットを用いて欠陥の半径位置および回転角位置を検出する。
【0128】
コントローラ1702は、アドレス再生手段1704を新たに有し、欠陥マッピング手段1706を有する。
【0129】
光ディスク1708は回転角位置パターン106を有しない。
【0130】
アドレス再生手段1704は入力信号から光ディスクに物理的に書かれたアドレスを再生する。アドレスは光ディスク102に物理的に記録されたディスクフォーマットに関するものであり、ディスクフォーマットから光ディスク102の半径位置や回転角位置を検出することができる。アドレス再生手段1704は、ディスクフォーマットから検出された半径位置と回転角位置をディスク位置信号として出力する。
【0131】
欠陥マッピング手段1706は、欠陥検出信号、半径位置検出信号、回転角位置検出信号に基づいて、欠陥が検出された半径位置と回転角位置を蓄え、欠陥を2次元でマッピングする。なお、半径位置と回転角位置を蓄える機能は、その全部または一部を外部機器160へ置いても良い。
【0132】
以上の構成において、実施の形態5に係る光ディスク装置1700について、図18を参照して説明する。図18は、球面収差を記録層204に適して補正し、記録層204にフォーカス制御を行い、表面206に付けた個人識別情報104を検出する方法のフローチャートである。
【0133】
この方法において、個人識別情報104を検出する処理が開始されると(S802)、個人識別情報104を読み取る必要があるか否かを判断する(S804)。個人識別情報104を読み取る必要があると判断されたなら、球面収差補正レンズ移動手段120は球面収差を記録層204に合わせる(S1402)。S804において個人識別情報104を読み取る必要がないと判断されたら、処理を終了する(S826)。球面収差を合わせた後に、フォーカス制御手段138は光スポットを記録層204に制御する(S1802)。光スポットを記録層204に制御した後に、所望のトラックにトラッキング制御をする(S1804)。トラッキング制御をした後に、個人識別情報領域を探索する(S1806)。探索した後に、個人識別情報領域の始端に移動する(S1808)。移動した後に、欠陥検出手段148により欠陥の有無を検出し(S814)。欠陥を検出したら、欠陥マッピング手段150はディスク位置信号により半径位置を記憶し(S1810)、ディスク位置信号により回転角位置を記憶する(S1812)。光ディスク102の1回転分でS814からS818を繰り返す(S820)。1回転分の欠陥のマッピングが終了した後に、半径位置を移動する(S1814)。なお、移動する距離は50um程度にすると良い。個人識別情報領域の欠陥のマッピングが終了していない(個人識別情報領域の終端に到達していない)場合は、S814に戻る(S824)。終了している場合は、処理を終了する(S826)。
【0134】
S1806において、個人識別情報領域を探索する方法としては、アドレス再生手段1704から得られるアドレスに従って光ディスク1708の略水平方向に光ピックアップ108を移動させるシーク動作を行って、光ディスク1708の内周から外周まで数mm程度の刻み幅で略水平方向に移動させ、ディスク1回転に現れる欠陥の頻度を検出する方法がある。別の方法としては、光ディスク102に個人識別情報領域が記録されていれば、それが個人識別領域の探索結果となる。別の方法としては、個人識別情報エリア214が設けられている場合は、それが個人識別領域の探索結果となる。
【0135】
S1808において、個人識別情報領域を始端に移動する方法としてはシーク動作がある。
【0136】
S1814において、半径位置を移動する方法としてはシーク動作がある。
【0137】
以上のように、実施の形態5の光ディスク装置1700によれば、光ディスク1708の物理的に書かれた情報によって半径位置と回転角位置を検出でき、光ディスク装置100から構成を一部省略できる。これにより、より安価に光ディスク装置を製造できる。
【0138】
なお、欠陥検出手段148は、前述した図16と同様な欠陥検出方法を用いると、より欠陥検出の性能が向上される。
【0139】
なお、個人識別情報領域でアドレスが検出できない場合は、アドレスが再生できる区間の半径位置と回転角位置に基づいて、アドレスが再生できない区間の半径位置と回転角位置を補間すると良い。
【0140】
なお、トラック追従中にトラッキング制御が所望のトラックから外れた場合は、所望のトラックに戻り欠陥のマッピングを再開する。なお、トラックが外れたことを検出する方法は、トラッキング制御中にトラッキングエラー信号のレベルが所定以上になったことを検出する方法や、再生されたアドレスが期待値を外れたことを検出する方法がある。
【0141】
(実施の形態6)
図19は本発明の実施の形態6に係る光ディスク装置1900の構成を示したブロック図である。前述した実施の形態1から実施の形態5までと同じ構成については、同じ符号を付し説明を省略する。
【0142】
実施の形態6に係る光ディスク装置1900は、欠陥検出にフォーカスエラー信号を用い欠陥厚みを検出し、欠陥マッピング信号に付与して出力する。
【0143】
コントローラ1902は欠陥検出手段1904、欠陥マッピング手段1906を有する。
【0144】
欠陥検出手段1904はフォーカスエラー信号を入力として、フォーカスエラー信号に基づいて欠陥を検出し欠陥検出信号を出力する。さらに、欠陥におけるフォーカスエラー信号の振れのレベルを欠陥厚み信号として出力する。
【0145】
図20はフォーカスエラー信号、フォーカスエラー信号から欠陥の有無を検出する欠陥検出閾値、欠陥検出信号、欠陥厚み信号(Ta、Tb、Tc、Td)を表す。図20では表面206にフォーカスを制御している場合である。光スポットが指紋の上を通過するとフォーカスエラー信号は一方の極性に偏って振れる。これは、ミクロ的に見ると指紋は水滴や油滴によって構成されている。水滴や油滴は数um程度の大きさでフォーカスエラー信号に現れる外乱としては非常に高い。例えば、水滴や油滴が10um、回転数が1000rpm、半径位置が40mmの場合では、約418kHzとなる。それに対して、フォーカス制御が応答可能な周波数は数kHzであり、水滴や油滴には追従しない。故に、水滴や油滴に対応したフォーカスエラー信号が現れる。
【0146】
欠陥検出手段1904の出力である欠陥検出信号と欠陥厚み信号は欠陥マッピング手段1906に入力される。
【0147】
欠陥マッピング手段1906は、欠陥検出信号、半径位置検出信号、回転角位置検出信号、欠陥厚み信号に基づいて、欠陥が検出された半径位置と回転角位置と欠陥厚みを蓄え、欠陥を2次元でマッピングする。マッピングした結果を欠陥マッピング信号として出力する。欠陥マッピング手段1906がマッピングした個人識別情報104の例を図21に示す。図21(a)では欠陥が○部で検出される。欠陥マッピング手段1906は図21(b)のように○部の半径位置と回転角位置と欠陥厚みを蓄える。なお、半径位置と回転角位置と欠陥厚みを蓄える機能は、その全部または一部を外部機器160へ置いても良い。
【0148】
欠陥マッピング手段1906の出力である欠陥マッピング信号は外部機器160へ入力される。外部機器160とは、例えばホストコンピュータである。
【0149】
以上のように、実施の形態6の光ディスク装置1900によれば、欠陥検出にフォーカスエラー信号を用いることで、欠陥マッピング信号に欠陥厚さを付与することができる。
【0150】
(実施の形態7)
本発明の実施の形態7では、光ディスク記録装置/再生装置と、個人識別情報104を管理するサーバとの連携によって、本人の個人識別情報104が付与されている場合にのみ、記録されたコンテンツの再生を行うことのできる光ディスク利用システムについて説明する。前述した実施の形態1から実施の形態6までと同じ構成については、同じ符号を付し説明を省略する。個人識別情報104は個人を識別するための情報であり、例えば指紋や筆跡である。本発明は個人識別情報104が指紋である場合を代表して記載する。
【0151】
図7(a)は、本発明の光ディスク記録装置/再生装置によって抽出される指紋マッピング情報の概念図を示している。また、図7(b)は、図7(a)の指紋マッピング情報である。
【0152】
本実施の形態での指紋マッピング情報とは、図7(b)に示すように、欠陥の半径位置と回転角位置を表したものであり、一種の2値画像データとしても取り扱うことのできる情報である。
【0153】
すなわち、本実施の形態での指紋マッピング情報とは、指紋の2値画像データとしても扱うことができるので、指紋の特徴点検出を行うことによる指紋認証方法は、従来から公知となっている一般的な指紋画像による指紋の特徴点検出や指紋認証をそのまま応用することが可能である。
【0154】
図22は、本実施の形態における光ディスク記録時の動作を示したフローチャートである。本システムでは、光ディスクに付いた指紋情報を読み出す光ディスク記録装置と、光ディスク記録装置とインターネットなど汎用ネットワークで接続された管理サーバとの連動によって、光ディスクにコンテンツを記録する動作の流れを示している。
【0155】
まず、光ディスク記録装置では、光ディスクの特定領域に付与されている光ディスク1枚ごとに識別可能なディスク識別情報を読み出す(S2202)。前記特定領域とは、光ディスクのバーストカッティング領域(BCA)を意味する。通常、著作権保護されたコンテンツを記録するためには、BCAにディスク識別情報が付与された記録型光ディスクを用いる必要がある。本ディスクも、同様に、ディスク内周部のBCAにバーコード上マークによってディスク識別情報が記録されている。
【0156】
次に、光ディスクに付いた指紋情報を2次元でマッピングし、指紋マッピング情報を生成する。(S2204)。これは、前述の実施の形態1に示したように、光ディスクからの反射光の光量変化を利用して欠陥であるかどうかの判定を行い、欠陥と判定された場合には、欠陥として指紋情報が検出される。同時に、欠陥の位置情報(半径位置、回転角位置)を抽出して2次元で指紋マッピングを行う。これを指紋領域に渡って行い、指紋マッピング情報を生成する。
【0157】
S2202によって、指紋マッピング情報の生成が終了した場合には、S2202で読み出したディスク識別情報と、S2204で生成された指紋のマッピング情報とを対応付けて、管理サーバに送信する(S2206)。
【0158】
管理サーバでは、光ディスク記録装置が送信した指紋のマッピング情報を受信する(S2208)。
【0159】
次に、受信した指紋のマッピング情報から指紋の特徴点を探索する(S2210)。この探索方法は、指紋の特徴点である端点や分岐などを抽出して、指紋の特徴点リストを作成する。特徴点リストとは、指紋の特徴点である端点や分岐などの特徴点の識別情報と、その位置情報のリストである。本特徴点は、指紋のマッピング情報のすべての点で探索を行い、抽出されるすべての特徴点をリストアップする(S2212)。
【0160】
また、特徴点の探索方法は、指紋のマッピング情報を画像データとして利用して、公知となっている指紋特徴点抽出を用い実施する。公知となっている指紋特徴点抽出方法は、例えば、http://jp.fujitsu.com/group/labs/techinfo/techguide/list/fingerprint_p05.htmlに記載された方法を用いる。
【0161】
次に、光ディスク記録装置にてコンテンツを暗号化して記録するための暗号鍵を生成する(S2214)。暗号鍵は、受信したディスク識別情報を初期値として生成した擬似乱数系列によって生成される。なお、暗号鍵は、擬似乱数系列でなくても、指紋リスト情報のハッシュ関数出力としてもかまわない。暗号鍵の生成方法は、容易に類推されない方法であればどのような方法でもかまわない。
【0162】
次に、受信した識別情報に対応付けて、生成した特徴点リストを管理データベース(DB)に記憶させる(S2216)。
【0163】
S2216によって管理DBに登録すると、生成した暗号鍵を光ディスク記録装置に送信する(S2218)。この場合、光ディスク記録装置と管理サーバは、秘密の暗号鍵によって暗号化して通信する仮想プライベートネットワークを利用することによって、生成した暗号鍵が第3者に漏洩することを防止することが可能となる。
【0164】
送信された暗号鍵は、光ディスク記録装置に受信される(S2220)。
【0165】
次に、受信した暗号鍵で光ディスクに記録するコンテンツを暗号化し、光ディスクに記録する(S2222)。
【0166】
図23は、図22で説明した光ディスク記録装置と管理サーバの特徴的なブロックを示したブロック図である。
【0167】
本システムは、光ディスク記録装置2300および管理サーバ2302で構成され、光ディスク記録装置2300は、光ピックアップ108、トラバース132、スピンドルモータ156、光ディスク識別情報読出し手段2304、欠陥検出手段148、欠陥マッピング手段150、通信手段2306、暗号化手段2308、変調手段2310および光源照射制御手段2312から構成され、管理サーバ2302は、通信手段2314、特徴点探索手段2316、管理データベース(DB)2318および暗号鍵生成手段2320から構成される。
【0168】
光ディスク識別情報読出し手段2304は、光ディスク2334の内周に位置するBCAに予め記録されているバーコード状記録マークから、ディスクごとに固有のディスク識別情報を読み出す。前記バーコード状マークは、光ディスク製造時に、高出力のYaGレーザなどによって、光ディスク表面の反射金属膜を融解して、除去することによって記録されている。バーコード状マークは光ビーム照射のともなう反射光量の変化によって読み出すことが可能となる。
【0169】
通信手段2306は、指紋マッピング情報送信手段2322と暗号鍵受信手段2324から構成され、汎用ネットワーク2326を介して管理サーバ2302との通信を行う部分であり、指紋マッピング情報送信手段2322によって、抽出した指紋マッピング情報と読み出されたディスク識別情報を管理サーバ2302に送信する。
【0170】
一方、管理サーバ2302の特徴的なブロックについて説明する。
【0171】
通信手段2314は、汎用ネットワーク2326により、光ディスク記録装置2300と接続され、指紋マッピング情報受信手段2328と暗号鍵送信手段2330とから構成される。指紋マッピング情報受信手段2328は、指紋マッピング情報送信手段2322から送信された指紋マッピング情報とディスク識別情報を受信する。
【0172】
特徴点探索手段2316は、受信した指紋マッピング情報から、特徴点リストを生成する。特徴点リストとは、指紋マッピング情報から抽出された指紋の特徴点の識別情報とその位置情報(半径位置、回転角位置)がリストアップされたリストである。また、指紋の特徴点とは、前述のとおり、指紋の分岐や端点であり、指紋マッピング情報から、指紋の分岐や端点を探索し、検出できた場合は、その点の位置情報とともにリストアップする。
【0173】
管理DB(データベース)2318は、特徴点探索手段2316で抽出した特徴点リストをディスク識別情報に関連付けて管理記憶するデータベースである。
【0174】
暗号鍵生成手段2320は、管理DB2318からのディスク識別情報と、内部に持つ擬似乱数系列生成手段2332で生成した乱数系列に基づいて、暗号鍵を生成して生成した暗号鍵を管理DB2318と暗号鍵送信手段2330に出力する。なお、擬似乱数系列生成手段2332は、一般的なM系列生成のためのシフトレジスタなので構成される。本実施の形態では、暗号鍵をディスク識別情報と生成した乱数系列との論理演算あるいは算術演算によって生成するものとする。
【0175】
管理DB2318は、ディスク識別情報に基づいて管理記憶している特徴点リストに加えて、暗号鍵生成手段2320で生成した暗号鍵も、対応するディスク識別情報に関連付けて管理される。
【0176】
暗号鍵送信手段2330は、暗号鍵生成手段2320で生成した暗号鍵を光ディスク記録装置2300に送信する。
【0177】
光ディスク記録装置2300の暗号鍵受信手段2324は、管理サーバ2302から送信される暗号鍵を受信する。
【0178】
暗号化手段2308は、受信した暗号鍵によって、光ディスク2334に記録するコンテンツ情報を暗号化する。本実施形態での暗号化は、一般的なDESやAESなどの秘密鍵暗号が用いられる。
【0179】
変調手段2310は、暗号化手段2308によって暗号化されたコンテンツを光ディスク2334の記録形態に合致する変調を行う。例えば、DVDであれば8−16変調であり、BDでは17pp変調である。
【0180】
光源照射制御手段2312は、光ピックアップ108に搭載されている光源の光源ドライバを含み、変調手段2310からの変調データに基づいて光ディスク2334に記録するための光源強度制御を行う。
【0181】
光ピックアップ108は、光源照射強度制御手段2312で制御された光源強度により光ディスク2334に光ビームを照射することによって光学的に読み取り可能な記録マークを光ディスク2334に形成することによって、暗号化されたコンテンツを光ディスク2334に記録する。
【0182】
図24は、本発明による光ディスク再生装置の処理の流れを示したフローチャートである。
【0183】
まず、光ディスクのBCA(Burst Cutting Area)などの特定領域に記録されているディスク識別情報を読み出す。一般的な光ディスクでは、光ディスク内周のBCA領域にバーコード状の記録マークによって光ディスクの固体識別が可能な光ディスク識別情報が記録されているので、この光ディスク識別情報を、光ディスクの起動直後に読み出す(S2402)。
【0184】
次に、光ディスクに付いた指紋情報を2次元でマッピングし、指紋マッピング情報を生成する。(S2204)。
【0185】
S2202によって、指紋マッピング情報の生成が終了した場合には、S2202で読み出したディスク識別情報と、S2204で生成された指紋のマッピング情報を管理サーバに送信する(S2404)。
【0186】
管理サーバでは、光ディスク再生装置から送信されるディスク識別情報と指紋マッピング情報とを受信する(S2406)。
【0187】
次に、指紋マッピング情報から指紋の特徴点を探索する(S2408)。
【0188】
次に、指紋の特徴点リストを生成する(S2410)。
【0189】
S2408、S2410は、S2210、S2212と同様の処理であり、ここでは詳細な説明は省略する。ただし、特徴点リストはS2212で生成するものより、S2410で生成するものが部分的なものであってもかまわない。S2212における特徴点リストは、指紋マッピング情報に含まれる全ての指紋の中から検出できる全ての特徴点をリストアップするのに対して、S2410では、指紋の特徴点の検出精度などに応じて、検出精度の高いもののみをリストアップしてもかまわない。
【0190】
次に受信したディスク識別情報に基づいて管理DBから登録されている特徴点リストを読み出す(S2412)。
【0191】
次に管理DBから読み出した特徴点リストと受信した特徴点リストを照合する。照合は、特徴点の種別(特徴点識別情報)とその位置情報(半径位置、回転各位置)に基づいて行う。従って、同じ種別の特徴点が、同位置に存在するか否かで照合を行う。また、位置情報は、照合範囲を管理DBに管理されている特徴点リストから許容誤差を含めた範囲で照合することが望ましい(S2414)。
【0192】
次に、照合結果の閾値判定によって所定数以上の特徴点位置の一致が確認されたかどうかを判定する(S2416)。前記所定数とは、本システムによる指紋照合の結果、本人と一致する確率を十分に確保するとともに、他人の指紋を間違えて本人を判定してしまう誤照合の確率を十分小さくするように設定される。
【0193】
S2416の結果、所定数以上の特徴点の一致が確認できない場合(S2416のNo)、照合エラーを光ディスク再生装置に送信する(S2418)。
【0194】
光ディスク再生装置では、照合エラーを受信する(S2420)。
【0195】
次に照合エラーを受信すると、光ディスク再生装置において光ディスクを再生する動作を停止して、処理を中断する(S2422)。
【0196】
一方、S2416で、所定数以上の特徴点の一致が確認できた場合、受信したディスク識別情報に対応した暗号鍵を管理DBから読み出し、光ディスク再生装置に送信する(S2424)。
【0197】
光ディスク再生装置では、管理サーバから送信された暗号鍵を受信する(S2426)。
【0198】
次に、受信した暗号鍵に基づいて、光ディスクから再生した暗号化されたコンテンツを復号化して再生する(S2428)。
【0199】
以上のように、本発明の光ディスク再生装置と管理サーバを用いることによって、光ディスクに付いた指紋情報が本人のものであるかどうかを管理サーバで判定して、照合の結果一致した場合にのみ、光ディスクを再生することのできる暗号鍵を光ディスク再生装置に送信することによって暗号化されたコンテンツを再生することが可能となる。
【0200】
一方、他人の指紋が付いた光ディスクの場合は、指紋情報の照合が不可能となり、光ディスクを再生することが不可能となる。
【0201】
図25は、本発明の光ディスク再生装置2500と管理サーバ2502の特徴的な構成を示したブロック図である。
【0202】
本光ディスク再生装置2500は、光ピックアップ108、トラバース132、スピンドルモータ156、光ピックアップ108、光ディスク識別情報読出し手段2304、欠陥検出手段148、欠陥マッピング手段150、通信手段2504、再生手段2506、復調手段2508および復号化手段2510から構成される。
【0203】
また、管理サーバ2502は、通信手段2512、特徴点探索手段2316、管理DB2514および特徴点リスト照合手段2516から構成される。
【0204】
通信手段2504は、インターネット網などの汎用ネットワーク2326によって管理サーバ2502に接続されており、指紋マッピング情報送信手段2518と暗号鍵受信部2520から構成される。
【0205】
指紋マッピング情報送信手段2518は、欠陥マッピング手段150で生成した指紋マッピング情報と読み出したディスク識別情報を管理サーバ2502に送信する。
【0206】
管理サーバ2502の通信手段2512は、インターネット網など汎用の汎用ネットワーク2326を介して光ディスク再生装置と接続され、指紋マッピング情報受信手段2522と暗号鍵送信手段2524から構成される。
【0207】
指紋マッピング情報受信手段2522は、光ディスク再生装置2500から送信される指紋マッピング情報と光ディスク識別情報を受信する。
【0208】
管理DB2514は、受信した光ディスク識別情報から、対応する特徴点リストと暗号鍵を管理情報として特徴点リスト照合手段2516に出力する。
【0209】
特徴点リスト照合手段2516は、特徴点位置照合手段2526と閾値判定手段2528から構成される。
【0210】
特徴点位置照合手段2526は、管理DB2514に管理されている特徴点リストと受信した特徴点リストの各特徴点リストに記載されている特徴点ごとにその特徴点の識別情報と特徴点の位置情報を照合する。
【0211】
また、閾値判定手段2528では、特徴点位置照合手段2526、特徴点位置の照合結果が合致する特徴点数を閾値判定することによって、指紋情報が認証できたかどうかを判定する。
【0212】
暗号鍵送信手段2524では、閾値判定手段2528の結果、本人の認証が確認できた段階で、汎用ネットワーク2326を介して、受信したディスク識別情報に従って管理DB2514から出力される暗号鍵を光ディスク再生装置2500に送信する。
【0213】
光ディスク再生装置2500の通信手段2504の暗号鍵受信部2520は、管理サーバ2502から送信される暗号鍵を受信する。
【0214】
一方、光ピックアップ108は、光ディスク2334に光ビームを照射し、その反射光から暗号化されたコンテンツ情報を示す読み取り信号を生成する。
【0215】
再生手段2506は、暗号化されたコンテンツ情報を示す読み取り信号をデジタル化して、変調データをデジタル信号として生成する。
【0216】
復調手段2508は、変調データを復調するブロックであり、光ディスク記録装置2300の変調手段2310に対応した復調を行う。
【0217】
復号化手段2510は、暗号化されたコンテンツ情報を受信した暗号鍵で復号化することによってコンテンツを再生する。
【0218】
以上より、本光ディスク再生装置と管理サーバを用いれば、光ディスク表面に付いた指紋情報が本人のものであると認証された場合にのみ、光ディスクに記録されている暗号化されたコンテンツの復号化を行うための暗号鍵が管理サーバから送信され、コンテンツを再生することが可能となる。
【0219】
一方、指紋が付いていない場合や他人の指紋が付いた指紋が認証されない場合には、管理サーバから暗号化されたコンテンツを復号するための暗号鍵情報が送信されないので、結果としてコンテンツを再生することが不可能である。
【0220】
従って、実質的に光ディスク再生装置のコストアップをすることなく、本人のみ使用・閲覧することが望ましいコンテンツや、指紋をふき取るまで有効となる光ディスクなどを実現すること可能となり、光ディスクの応用範囲を広げることが可能となる。
【0221】
図26は、光ディスクに付与される指紋の概念図と、そのときの特徴点リストの形態を示した概念図である。
【0222】
特徴点探索手段2316によって指紋マッピング情報から特徴点を探索した結果、端点としてY1、Y4、Y5が検出され、分岐点としてY2、Y3が検出された例である。
【0223】
このように探索された特徴点は、指紋マッピング情報と対応付けて得られる特徴点の位置情報(半径位置、回転角位置)と対応付け、さらに、特徴点が端点なのか分岐点なのかを示す特徴点識別情報とともに特頂点リストを生成する。
【0224】
したがって、管理サーバ2502の特徴点リスト照合部Y517では、受信した指紋マッピング情報から生成した特徴点リストと、管理DB2514に管理されている特徴点リストを一点一点、特徴点の識別情報とその位置情報とを照合していくことによって、指紋が本人のものであるかの認証を行う。
【0225】
本システムでは、指紋の特徴点探索というきわめて計算コストの高い処理をサーバ側の処理とすることによって、光ディスク再生装置のコストアップ要素を実質的になくすとともに、指紋認証のような高いセキュリティーを実現している。
【0226】
また、本発明では、指紋をセンシングするための特殊なセンサなどは必要とせず、光ディスクの表面に付いた指紋をコンテンツ情報と同じ光学系で検出することが可能である。
【0227】
また、光ディスク再生装置では、指紋位置とその位置情報を2次元マッピングし、指紋の2次元画像情報と等価な情報を生成し、管理サーバでは、指紋マッピング情報と画像データとして用いることによって、一般的な指紋認証手段をそのまま利用することが可能となる。
【0228】
また、実施の形態6に示したような欠陥検出手段1904によって、指紋マッピング情報に欠陥厚みの情報を付与できる。指紋は時間経過により水滴や油滴が蒸発し、厚さが薄くなる。2つの異なる時点の指紋マッピング情報を比較することで時間経過を検出することができ、時間によりコンテンツ再生の可否を制御することが可能となる。
【産業上の利用可能性】
【0229】
本発明による光ディスク装置は、光ディスクに付いた個人識別情報を検出することが可能となり、光ディスクに記録されたコンテンツや光ディスクに接続された機器等のセキュリティー向上に有用である。
【符号の説明】
【0230】
102 光ディスク
104 個人識別情報
106 回転角位置パターン
108 光ピックアップ
110 光源
118 球面収差補正レンズ
120 球面収差補正レンズ移動手段
122 対物レンズ
124 フォーカス移動手段
126 トラッキング移動手段
130 受光手段
132 トラバース
134 コントローラ
136 フォーカスエラー信号生成手段
138 フォーカス制御手段
140 トラッキングエラー信号生成手段
142 トラッキング制御手段
144 再生信号指標生成手段
146 球面収差検出手段
148 欠陥検出手段
150 欠陥マッピング手段
152 半径位置検出手段
154 回転角位置検出手段
156 ディスクモータ
158 回転角位置パターン検出手段
160 外部機器
202 レーベル面
204 記録層
206 表面
210 物理情報領域
214 個人識別情報エリア
304 フォーカス位相補償フィルタ
306 フォーカス制御信号オフセット手段
404 トラッキング位相補償フィルタ
406 トラッキング制御信号オフセット手段
1006 フォーカス位相補償信号記憶手段
1310 光量信号生成手段
1704 アドレス再生手段
1706 欠陥マッピング手段
1904 欠陥検出手段
1906 欠陥マッピング手段
2304 光ディスク識別情報読出し手段
2306 通信手段
2308 暗号手段
2310 変調手段
2312 光源照射制御手段
2314 通信手段
2316 特徴点探索手段
2318 管理データベース
2320 暗号鍵生成手段
2322 指紋マッピング情報送信手段
2324 暗号鍵受信手段
2328 指紋マッピング情報受信手段
2330 暗号鍵送信手段
2332 擬似乱数系列生成手段
2504 通信手段
2506 再生手段
2508 復調手段
2510 復号化手段
2316 特徴点リスト照合手段
2526 特徴点位置照合手段
2528 閾値判定手段
【技術分野】
【0001】
本発明は光ディスクの表面に付いた個人を識別する情報(個人識別情報)を検出する光ディスク装置、および個人識別情報を管理するシステムに関するものである。
【背景技術】
【0002】
近年、情報セキュリティーを向上させる目的で、複製が困難である個人に固有な生体情報、例えば指紋、静脈、虹彩を個人識別情報として認証の一部に用いる場合がある。
【0003】
従来の光ディスク装置で、同様に個人識別情報を使った認証を行う場合には、新たに外部機器を用意する必要があり、コストが掛かる。このため、光ディスク装置のみによって個人識別情報を検出できれば有用である。
【0004】
本発明に関連した従来技術として、特許第2531293号公報(特許文献1)がある。
【0005】
特許第2531293号公報に記載の技術では、欠陥の位置を、光ディスクの半径位置と回転角位置でマッピングし、マッピングした半径位置と回転角位置から欠陥塊を検出している。
【0006】
光ディスクからの反射光が欠落する部分を検出し、その長さを求め欠陥の周方向の長さを検出する。次に、ディスクに書かれたディスクフォーマットを再生し、そのディスクフォーマットに基づいて欠陥の種類を判別する。光ディスク回転の1回転につき1発のローテーションパルスと再生されたディスクフォーマットに基づいて欠陥の半径位置と回転角位置を検出する。欠陥の種類、周方向の長さ、半径位置、回転角位置を欠陥データとして、メモリに蓄える。メモリに蓄えた欠陥データに基づいて、その欠陥の半径位置と回転角位置から欠陥塊を検出する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第2531293号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
新たな外部機器を必要とせずに光ディスク装置で個人識別情報を検出する場合、ここでは光ディスクの表面に指紋を付けて、それを光ピックアップで収束させた光スポットで検出する場合について考える。外部機器としての指紋センサには一般的に50um程度の検出分解能が求められることが知られている。
【0009】
しかしながら、従来の構成を個人識別情報の検出に応用しようとしても従来の構成は複数のトラックに渡る欠陥である欠陥塊を検出するものであった。また、欠陥の半径位置と回転角位置を光ディスクのディスクフォーマットに基づいて検出していた。故に、光ディスクの記録層に光スポットを制御する必要があった。記録層に光スポット当てた場合の表面におけるビームの直径はディスクの種類によって異なるが大まかには以下の通りとなる。コンパクトディスク(以下、CDと称す)の場合は約690um、DVDの場合は約520um、Blu−ray Disc(以下、BDと称す)の場合は約140umである。これらは、外部機器の指紋センサに求められる検出分解能に比べると大きい。また、指紋を検出するための欠陥検出方法についても特に言及がない。よって、個人識別情報である指紋を検出するのには十分な性能がない。
【課題を解決するための手段】
【0010】
従来の課題を解決するために、光ディスクの表面に付いた個人識別情報を検出する本発明の光ディスク装置は、前記光ディスクに情報を記録または再生するための光ピックアップと、前記光ディスクからの反射光を光電変換により反射光信号に変換する受光素子と、前記反射光信号に基づいてフォーカス信号を生成するフォーカス信号生成手段と、前記フォーカス信号に基づいて前記光ディスクに光スポットを制御するフォーカス制御信号を生成するフォーカス制御手段と、前記反射光信号に基づいて反射光の光量変化から欠陥を検出し欠陥検出信号を生成する欠陥検出手段と、前記光ディスクの半径位置を検出し半径位置信号を生成する半径位置検出手段と、前記光ディスクの回転角位置を検出し回転角位置信号を生成する回転角位置検出手段と、前記欠陥検出信号と、前記半径位置検出信号と、前記回転位置検出信号とを記憶し欠陥位置を前記光ディスク上の2次元でマッピングする欠陥マッピング手段とを備え、前記欠陥マッピング手段により前記個人識別情報を2次元でマッピングし前記個人識別情報を検出することを特徴とする。
【0011】
また、前記フォーカス制御手段は、前記光ディスクにおける情報が記録された若しくは情報を記録した層とは異なる面であって、前記個人識別情報が付いた前記光ディスクの表面に光スポットを制御することを特徴とする。
【0012】
また、前記光ピックアップは球面収差補正レンズと、球面収差補正レンズ移動手段とをさらに備え、前記球面収差補正レンズが前記光ディスクの表面において球面収差が略ゼロとなるように前記球面収差補正レンズ移動手段を設定することを特徴とする。
【0013】
また、前記光ディスクは情報が記録された若しくは情報を記録するための記録層とをさらに備え、前記フォーカス制御手段は、前記光ディスクの前記記録層に光スポットを制御することを特徴とする。
【0014】
また、前記欠陥検出手段は、ボトムホールド回路を備え、前記反射光信号に基づいた信号を前記ボトムホールド回路に通過させて得られるボトムエンベロープ信号と所定の値とを比較して欠陥検出を行うことを特徴とする。
【0015】
また、前記欠陥検出手段は、モノマルチ回路を備え、前記反射光信号に基づいた信号と所定の値とを比較して欠陥検出をした後にモノマルチ回路に通過させて欠陥検出を所定の時間だけ後ろに延長することを特徴とする。
【0016】
また、前記欠陥検出手段は、トップホールド回路と、ボトムホールド回路を備え、前記反射光信号に基づいた信号を前記トップホールド回路に通過させて得られるトップエンベロープ信号と、前記反射光信号に基づいた信号を前記ボトムホールド回路に通過させて得られるボトムエンベロープ信号と、前記トップエンベロープ信号と前記ボトムエンベロープ信号に基づいて生成される所定の値と、前記反射光信号に基づいた信号と前記所定の値とを比較して欠陥検出を行うことを特徴とする。
【0017】
また、前記フォーカス信号生成手段は光スポットと前記光ディスクの表面または光スポットと記録層との垂直のずれを表すフォーカスエラー信号を生成し、出力することを特徴とする。
【0018】
また、前記フォーカス信号生成手段は前記反射光の光量を表す光量信号を生成し、出力することを特徴とする。
【0019】
また、前記フォーカス制御手段は、前記フォーカス信号に位相補償を施したフォーカス位相補償信号を生成し出力するフォーカス位相補償手段と、前記フォーカス位相補償信号に基づいてフォーカス位相補償信号記憶値を生成し蓄えるフォーカス位相補償信号記憶手段とを備え、前記個人識別情報が付いた領域ではフォーカス位相補償信号記憶値に基づいてフォーカス制御信号を生成することを特徴とする。
【0020】
また、前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースをさらに備え、前記半径位置検出手段は前記トラバースの位置に基づいて半径位置信号を生成することを特徴とする。
【0021】
また、前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、前記トラッキング移動手段の位置に基づいて半径位置信号を生成することを特徴とする。
【0022】
また、前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースとを備え、前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、記半径位置検出手段は前記トラバースの位置と前記トラッキング移動手段の位置に基づいて半径位置信号を生成することを特徴とする。
【0023】
また、前記光ディスクは前記光ディスクの回転角を表す回転角位置パターンを有することを特徴とする。
【0024】
また、前記光ディスク装置を制御するコントローラを備え、前記コントローラが有する内部クロックと、前記回転角位置パターンを前記光ピックアップにより読み取った結果により前記内部クロックを校正し、校正した前記内部クロックに基づいて回転角位置を検出することを特徴とする。
【0025】
また、前記光ディスク装置は前記光ディスクが物理的に有するアドレスを再生するアドレス再生手段とをさらに備え、再生されたアドレスに基づいて欠陥の半径位置および回転角位置を検出することを特徴とする。
【0026】
また、ディスク1回転あたり欠陥が所定の頻度以上である場合は、前記光ディスクの回転を速くすることを特徴とする。
【0027】
また、所定の長さ以上の欠陥がある場合は、前記光ディスクの回転を速くすることを特徴とする。
【0028】
また、ユーザーが前記個人識別情報の検出の開始を指令することを特徴とする。
【0029】
また、前記光ディスクは物理情報領域と、前記物理情報領域は前記光ディスクが前記個人識別情報を付けても良い光ディスクか否かを表す情報である個人識別情報用光ディスク識別子とをさらに備え、前記個人識別情報用光ディスク識別子の有無に基づいて、前記個人識別情報の検出の開始を判断することを特徴とする。
【0030】
また、前記個人識別情報の検出を開始した後に、前記個人識別情報が付いた領域である個人識別情報領域を探索することを特徴とする。
【0031】
また、前記光ディスクが書き込み可能な記録型光ディスクであって、前記個人識別情報が付いた領域である個人識別情報領域の位置が前記記録型光ディスクに記録されたことを特徴とする。
【0032】
また、前記個人識別情報領域の位置に基づいて、前記欠陥マッピング手段はマッピングを開始することを特徴とする。
【0033】
また、前記個人識別情報を付ける領域である個人識別情報エリアが光ディスク上に明示されたことを特徴とする。
【0034】
また、前記個人識別情報エリアに基づいて、前記欠陥マッピング手段はマッピングを開始することを特徴とする。
【発明の効果】
【0035】
本発明の光ディスク装置を用いることで、光ディスクの表面に光スポットを制御し、表面にあたる光スポットの大きさを50umよりも十分に小さくし、個人識別情報の検出が可能になる。
【0036】
また、表面に光スポットを制御した場合に好適な欠陥検出の方法を用いることで、個人識別情報の検出性能が向上する。
【0037】
また、検出した個人識別情報に基づいてコンテンツを暗号化し、光ディスクに記録することで、コンテンツのセキュリティーが向上する。
【図面の簡単な説明】
【0038】
【図1】本発明の実施の形態1、実施の形態2、実施の形態3における光ディスク装置を示す図
【図2】光ディスク102の構成を示す図
【図3】フォーカス制御手段138の構成を示す図
【図4】トラッキング制御手段142の構成を示す図
【図5】表面206にフォーカス制御した場合に現れる光量変化と欠陥検出手段148での欠陥検出方法を示す図
【図6】回転角位置パターン106の例と検出パターンを示す図
【図7】欠陥マッピング手段150が生成する欠陥の2次元マッピングを示す図
【図8】本発明の実施の形態1における動作を示すフローチャート
【図9】フォーカスアップ動作時に現れるフォーカスエラー信号を示す図
【図10】フォーカス制御手段1002の構成を示す図
【図11】本発明の実施の形態2における動作を示すフローチャート
【図12】本発明の実施の形態3における動作を示すフローチャート
【図13】本発明の実施の形態4における光ディスク装置を示す図
【図14】本発明の実施の形態4における動作を示すフローチャート
【図15】フォーカスエラー信号の対称性を表す図
【図16】記録層204にフォーカス制御した場合に現れる光量変化と欠陥検出手段148での欠陥検出方法を示す図
【図17】本発明の実施の形態5における光ディスク装置を示す図
【図18】本発明の実施の形態5における動作を示すフローチャート
【図19】本発明の実施の形態6における光ディスク装置を示す図
【図20】表面206にフォーカス制御した場合に現れるフォーカスエラー信号と欠陥検出手段1904での欠陥検出方法を示す図
【図21】欠陥マッピング手段1906が生成する欠陥の2次元マッピングを示す図
【図22】本発明の実施の形態7における光ディスク記録装置の記録動作を示すフローチャート
【図23】本発明の実施の形態7における光ディスク記録装置を示す図
【図24】本発明の実施の形態7における光ディスク再生装置の再生動作を示すフローチャート
【図25】本発明の実施の形態7における光ディスク再生装置を示す図
【図26】指紋の概念図と特徴点リストの形態を示す図
【図27】表面206にフォーカス制御した場合に現れる光量変化と欠陥検出手段148での欠陥検出方法を示す図
【図28】表面206にフォーカス制御した場合に現れる光量変化と欠陥検出手段148での欠陥検出方法を示す図
【図29】光ディスク102の構成を示す図
【発明を実施するための形態】
【0039】
以下、本発明を実施するための最良の形態について、図面を用いて説明する。
【0040】
(実施の形態1)
図1は本発明の実施の形態1に係る光ディスク装置100の構成を示したブロック図である。
【0041】
実施の形態1に係る光ディスク装置100は、球面収差を表面206に適して補正し、表面206にフォーカス制御を行い、表面206に付けた個人識別情報104を検出する。
【0042】
光ディスク102の表面206に個人識別情報104が付いている。個人識別情報104は個人を識別するための情報であり、例えば指紋や筆跡である。本発明は個人識別情報104が指紋である場合を代表して記載する。個人識別情報104が付いた光ディスク102上の領域を個人識別情報領域と称す。光ディスク102の内周部分には回転角位置パターン106がある。回転角位置パターン106は光ディスク102の絶対的な回転角位置を表す。
【0043】
光ディスク102の例を図2に示す。
【0044】
図2(a)は光ディスク102の層構成を表す図である。レーベル面202、記録層204、表面206から成る。記録層204は情報が記録された層、若しくは情報を記録する層である。一般的な光ディスク装置は記録層204から光スポットにより情報を再生または記録する。表面206は記録層204から情報を再生または記録する場合に光が入射する面である。レーベル面202は表面206と反対に位置する。レーベル面202は、主に図柄を印刷するのに用いられる面である。なお、個人識別情報104を付けるのは表面206とレーベル面202のどちらでも良く、本発明は個人識別情報104を表面206に付けた場合を代表として記載する。
【0045】
図2(b)は表面206側から光ディスク102を見た図である。なお、レーベル面202に個人識別情報104を付ける場合は、例えばライトスクライブ(LightScribe)に用いられるディスクのように、レーベル面202で光を反射しなければならない。
【0046】
図2(c)は光ディスク102の別の形態である光ディスク208である。光ディスク208には、物理情報領域210を備える。物理情報領域210は一般的な光ディスクに備わっており、記録層204に配置され、ディスクの種類などの情報が書かれた領域である。物理情報領域210の中には光ディスク208が個人識別情報104を付けて良い光ディスクか否かを表す情報が記録されている。なお、光ディスク208の記録層206が記録可能な場合には、個人識別情報104の有無や個人識別情報領域の位置を記録しても良い。
【0047】
図2(d)は光ディスク102の別の形態である光ディスク212である。光ディスク212には、個人識別情報領域を個人識別情報エリア214として明示してある。個人識別情報エリア214に個人識別情報104を付ける。
【0048】
図2(e)は光ディスク102の別の層構成である光ディスク216を表す図である。光ディスク216は、レーベル面202、表面206から成る。光ディスク216は記録層204を持たず、個人識別情報104を付けるのに特化した光ディスクである。なお、光ディスク216は、回転角位置パターン106や個人識別情報エリア214を備えても良い。
【0049】
回転角位置パターン106は回転角位置パターン検出手段158によって、回転角位置パターン106のパターンが検出される。回転角位置パターン検出手段158は検出したパターンを回転角位置パターン検出信号として出力する。
【0050】
光ピックアップ108は、光源110、カップリングレンズ112、偏光ビームスプリッタ114、1/4波長板116、球面収差補正レンズ118、球面収差補正レンズ移動手段120、対物レンズ122、フォーカス移動手段124、トラッキング移動手段126、集光レンズ128、受光手段130から成る。
【0051】
光源110は拡散光を出射する素子である。光ディスクの場合では半導体レーザが広く用いられ、CDでは略780nm、DVDでは略650nm、BDでは略405nmの波長である半導体レーザが用いられる。光源110から出射された光はカップリングレンズ112によって平行光にされる。カップリングレンズ112を通過した光は偏光ビームスプリッタ114で反射される。偏光ビームスプリッタ114で反射した光は1/4波長板を通過して円偏光される。1/4波長板116を通過した光は、球面収差補正レンズ118を通過し光の球面収差が補正される。球面収差補正レンズ118は球面収差補正レンズ移動120によって移動する。球面収差補正レンズ118は表面206までの球面収差を補正できる。球面収差補正レンズ移動手段120は表面206までの球面収差を補正できるストロークを持つ。これにより、表面206でも良好なフォーカスエラー信号が得られ制御が安定となる。なお、光源110が複数の波長を有する場合は、少なくとも1つの波長に対して表面206まで球面収差を補正できるストロークを有し、その波長の光源110によって個人識別情報104を検出する。球面収差補正レンズ118を通過した光は対物レンズ122によって収束され光スポットが形成される。対物レンズ122はフォーカス移動手段124によって光ディスク102の略垂直方向に移動する。対物レンズ122はトラッキング移動手段126によって光ディスク102の略水平方向に移動する。なお、トラッキング移動手段126は数百umのストロークを有する。
【0052】
対物レンズ122によって形成された光スポットが光ディスク102で反射した光は、対物レンズ122、球面収差補正レンズ118、1/4波長板116を通過して直線偏光され、偏光ビームスプリッタ114を通過する。偏光ビームスプリッタ114を通過した光は集光レンズ128で集光される。集光レンズ128で集光した光は受光素子130で受光される。受光手段130は受光した光を光電変換によって電気信号に変換し、反射光信号を出力する。光電素子130は種々の信号を生成するために、複数の素子に分割されている。反射光信号はコントローラ134に入力される。コントローラ134は光ディスク装置100を制御するLSIである。
【0053】
光ピックアップ108は、トラバース132によって光ディスク102に略水平方向に移動する。トラバース132は、リードスクリュー(図示しない)とモータ(図示しない)とから成る。リードスクリュー(図示しない)をモータ(図示しない)により回転させることで直線運動を実現し、光ピックアップ108が略水平方向に移動する。トラバース132は、コントローラ134が出力するトラバース制御信号に従って制御される。トラバース制御信号はコントローラ134が管理するトラバースの現在位置とコントローラ134が計算する目標位置から駆動パルスを生成することで実現される。
【0054】
ディスクモータ156は光ディスク102を所定の回転数で回転させる。ディスクモータ156に備えた回転数センサ(図示しない)により回転数を検出し、回転数に応じてディスク1回転に数個のパルスを発生するFG信号がコントローラ134に入力される。コントローラ134は、FG信号と目標回転数に基づいて所望の回転数になるように回転数制御信号を生成し、回転数制御信号がディスクモータ156に入力される。
【0055】
コントローラ134は、フォーカスエラー信号生成手段136、フォーカス制御手段138、トラッキングエラー信号生成手段140、トラッキング制御手段142、再生信号指標生成手段144、球面収差検出手段146、欠陥検出手段148、欠陥マッピング手段150、半径位置検出手段152、回転角位置検出手段154から構成される。
【0056】
反射光信号はフォーカスエラー信号生成手段136、トラッキングエラー信号生成手段140、再生信号指標生成手段144、欠陥検出手段148に入力される。
【0057】
フォーカスエラー信号生成手段136の出力であるフォーカスエラー信号はフォーカス制御手段138に入力される。フォーカス制御手段138の出力であるフォーカス制御信号はフォーカス移動手段124に入力される。
【0058】
トラッキングエラー信号生成手段140の出力であるトラッキングエラー信号はトラッキング制御手段142と球面収差検出手段146に入力される。トラッキング制御手段142の出力であるトラッキング制御信号はトラッキング移動手段126に入力される。
【0059】
再生信号指標生成手段144の出力である再生信号指標信号は球面収差検出手段146に入力される。
【0060】
欠陥検出手段148の出力である欠陥検出信号は欠陥マッピング手段150に入力される。
【0061】
球面収差検出手段146の出力である球面収差制御信号は球面収差補正レンズ移動手段120に入力される。
【0062】
半径位置検出手段152の出力である半径位置検出信号は欠陥マッピング手段150に入力される。
【0063】
回転角位置検出手段154の出力である回転角位置検出信号は欠陥マッピング手段150に入力される。
【0064】
欠陥マッピング手段150の出力である欠陥マッピング信号は外部機器160へ入力される。外部機器160とは、例えばホストコンピュータである。
【0065】
フォーカスエラー信号生成手段136は、入力信号からフォーカスエラー信号を生成し、出力する。フォーカスエラー信号は、光スポットと表面206との垂直方向のずれ、または光スポットと記録層204との垂直方向のずれを表す信号であり、非点収差法といった検出法を用いて実現できる。
【0066】
フォーカス制御手段138は、入力信号からフォーカス制御信号を生成し、出力する。フォーカス制御手段138の例を図3に示す。フォーカス制御手段138は、フォーカスON/OFFスイッチ302、フォーカス位相補償フィルタ304、フォーカス制御信号オフセット手段306、加算器308から成る。フォーカスON/OFFスイッチ302がフォーカスON(スイッチが入力信号の方に倒れた場合)では、入力信号に基づいて光スポットの垂直方向が目標位置へ収束するように、入力信号に応じた目標レベルを設定し、目標レベルと入力信号との差分である誤差信号にフォーカス位相補償フィルタ304により位相補償を施し、フォーカス位相補償信号を生成し、出力する。フォーカス制御信号オフセット手段306はフォーカス制御信号オフセットを設定できる。加算器308はフォーカス位相補償信号とフォーカス制御信号オフセットを加算し、フォーカス制御信号を出力する。フォーカスOFFの場合では、光スポットの垂直方向の目標位置への制御は行わない。フォーカスOFFの場合では、フォーカス制御信号オフセットを適切に増加させると、光スポットは光ディスク102の垂直方向に近づきフォーカスアップ動作ができる。また、フォーカスOFFの場合では、フォーカス制御信号オフセットを適切に減少させると、光スポットは光ディスク102の垂直方向に遠のきフォーカスダウン動作ができる。
【0067】
トラッキングエラー信号生成手段140は、入力信号からトラッキングエラー信号を生成し、出力する。トラッキングエラー信号は光スポットと記録層204上のトラック中心とのずれを表す信号であり、差動プッシュプル法といった検出法を用いて実現できる。
【0068】
トラッキング制御手段142は、入力信号からトラッキング制御信号を生成し、出力する。トラッキング制御手段142の例を図4に示す。トラッキング制御手段142は、トラッキングON/OFFスイッチ402、トラッキング位相補償フィルタ404、トラッキング制御信号オフセット手段406、加算器408から成る。トラッキングON/OFFスイッチ402がトラッキングON(スイッチが入力信号の方に倒れた場合)では、入力信号に基づいて光スポットの水平方向が目標位置へ収束するように、入力信号に応じた目標レベルを設定し、目標レベルと入力信号との差分である誤差信号にトラッキング位相補償フィルタ404により位相補償を施し、トラッキング位相補償信号を生成し、出力する。トラッキング制御信号オフセット手段406はトラッキング制御信号オフセットを設定できる。加算器408は、トラッキング位相補償信号とトラッキング制御信号オフセットを加算し、トラッキング制御信号を出力する。トラッキングOFFの場合では、光スポットの水平方向の目標位置への制御は行わない。トラッキングOFFの場合では、トラッキング制御信号オフセットを所定の量だけ加えると、光スポットが光ディスク102の水平方向に所定の量だけ移動する。
【0069】
再生信号指標生成手段144は、入力信号から再生信号指標信号を生成し、出力する。再生信号指標信号とは再生信号の振幅や再生信号のジッタなど、再生信号の品質を表すものである。
【0070】
球面収差検出手段146は、入力信号に基づいて、球面収差が好適になるように球面収差制御信号を生成し、出力する。球面収差が好適であるとは、例えばトラッキングエラー信号の振幅が最大となる場合や、再生信号指標信号のうち再生信号の振幅が最大となる場合である。
【0071】
球面収差を表面206に合わせる方法としては、球面収差補正レンズ118の位置を光ピックアップ108の表面206における設計中心に合わせる方法がある。別の方法としては、記録層204において球面収差を球面収差検出手段146で検出し球面収差制御信号を生成し、記録層204における球面収差制御信号に基づいて表面206における球面収差制御信号を求める方法である。球面収差は基材厚(表面206から記録層204までの距離)に比例するので、記録層204における球面収差制御信号と基材厚から表面206における球面収差を求めることができる。なお、基材厚は図9に示すように、フォーカスアップ動作によりフォーカスエラー信号のゼロクロスの間隔Lを測定することで求められる。なお、基材厚は例えば規格で決まっている所定の値を使っても良い。
【0072】
欠陥検出手段148は、反射光信号の全てまたは一部の和から反射光量を求め、反射光量が低下する欠陥があるか否かを検出する。欠陥の有無は欠陥検出信号として出力する。欠陥検出手段148の出力信号の例を図5,図27,図28に示す。図5,図27,図28は反射光量と、反射光量から欠陥の有無を検出する欠陥検出閾値と、欠陥検出信号を表す。図5,図27,図28では表面206にフォーカスを制御している場合である。光スポットが指紋の上を通過すると反射光量はパルス状に変化する。これは、ミクロ的に見ると指紋が数um程度の水滴や油滴によって構成されているためである。対して、表面206における光スポットが水滴や油滴よりも小さいため、水滴や油滴を検出してパルス状の信号となる。
【0073】
図5は反射光量を所定の欠陥検出閾値を用いて欠陥検出信号を生成した場合を表す。指紋はマクロ的に見ると凹凸により紋様を作り出し、領域502や領域504は指紋での1つ1つの凸部に対応する。凸部に対応して領域502と領域504でそれぞれ1つの欠陥が検出されることが期待される。しかしながら、図5においては、領域502や領域504で複数個の欠陥が検出されている。これでは、個人識別情報104の検出ができない。
【0074】
個人識別情報104を検出する方法として、ボトムホールド回路(図示しない)を設ける方法がある。
【0075】
図27は反射光量と、ボトムエンベロープ信号と、欠陥検出信号を示す。ボトムエンベロープ信号は、反射光量をボトムホールド回路(図示しない)に通すことで生成できる。欠陥検出信号はボトムエンベロープ信号と所定の欠陥検出閾値を比較して生成できる。
【0076】
図527では領域502と領域504でそれぞれ1回だけ欠陥を検出している。つまり、指紋の1つ1つの凸部を検出できる。なお、ボトムホールド回路(図示しない)のアタックゲインは、個人識別情報104の特徴(例えば指紋では水滴や油滴の大きさ、凸部の間隔)と光ディスク102の回転数とスポットが位置する半径位置から適切に求めれば良い。
【0077】
また、個人識別情報104を検出する別の方法として、モノマルチ回路(図示しない)を設ける方法がある。
【0078】
図28は反射光量と、モノマルチ回路を通過する前の信号、モノマルチ回路を通過した後の信号を示す。モノマルチ回路を通過する前の信号は、反射光量と所定の欠陥検出閾値を比較して生成でき、図5に示した欠陥検出信号と同じである。モノマルチ回路を通過した後の信号は、モノマルチ回路を通過する前の信号の立下りから所定の時間Δだけ後ろに延長して生成でき、この信号を欠陥検出信号とする。
【0079】
図528では領域502と領域504でそれぞれ1回だけ欠陥を検出している。つまり、指紋の1つ1つの凸部を検出できる。なお、所定の時間Δは、個人識別情報104の特徴(例えば指紋では水滴や油滴の大きさ、凸部の間隔)と光ディスク102の回転数とスポットが位置する半径位置から適切に求めれば良い。
【0080】
欠陥検出手段148を個人識別情報104に適した構成と設定をすることで、図27や図28のように個人識別情報104を欠陥として検出することが可能となる。
【0081】
半径位置検出手段152は、コントローラ134が管理するトラバースの現在位置とトラッキング制御信号オフセットから光スポットの半径位置を計算する。計算した半径位置は半径位置検出信号として出力する。
【0082】
回転角位置検出手段156は、回転角位置パターン106から光ディスク102の絶対的な回転角位置を検出する。回転角位置パターン106の例を図6に示す。回転角位置パターン106は不均一なパターンから構成され、そのパターンの並び方によって回転角位置が表現されている。なお、回転角位置を表現できれば、回転角位置パターン106は図6以外の別の形態を取っても良い。回転角位置パターン106は、回転角位置パターン検出手段158によって検出され、回転角位置パターン検出信号が出力される。回転角位置パターン検出手段158は、例えば反射型フォトセンサによって実現できる。回転角位置検出手段156は、回転角位置パターン検出信号を2値化し、デコードすることで回転角位置を検出する。検出した回転角位置は回転角位置検出信号として出力する。なお、回転角位置パターン106を光ピックアップ108で読み取り、その結果でコントローラ134の内部クロックを校正し、校正した内部クロックに基づいて回転角位置の検出を行っても良い。なお、内部クロックに代わって、FG信号を用いても良い。なお、回転角位置パターン106が表す回転角位置は光ディスク102の絶対値でも、相対値でも良い。相対値の場合は、別の信号、例えば内部クロックを用いることで、絶対値に変換すれば良い。
【0083】
欠陥マッピング手段150は、欠陥検出信号、半径位置検出信号、回転角位置検出信号に基づいて、欠陥が検出された半径位置と回転角位置を蓄え、欠陥を2次元でマッピングする。マッピングした欠陥マッピング情報を欠陥マッピング信号として出力する。本発明は個人識別情報104として指紋を代表して記載しており、欠陥マッピング情報とは、すなわち指紋マッピング情報である。
【0084】
欠陥マッピング手段150がマッピングした個人識別情報104の例を図7に示す。図7(a)では欠陥が○部で検出される。欠陥マッピング手段150は図7(b)のように○部の半径位置と回転角位置を蓄え、2次元でマッピングする。なお、半径位置と回転角位置を蓄える機能は、その全部または一部を外部機器160へ置いても良い。
【0085】
以上の構成において実施の形態1に係る光ディスク装置100について図8を参照して説明する。図8は、球面収差を表面206に適して補正し、表面206にフォーカス制御を行い、表面206に付けた個人識別情報104を検出する方法のフローチャートである。
【0086】
この方法において、個人識別情報104を検出する処理が開始されると(S802)、個人識別情報104を読み取る必要があるか否かを判断する(S804)。個人識別情報104を読み取る必要があると判断されたなら、球面収差補正レンズ移動手段120は球面収差を表面206に合わせる(S806)。S804において個人識別情報104を読み取る必要がないと判断されたら、処理を終了する(S826)。球面収差を合わせた後に、フォーカス制御手段138は光スポットを表面206に制御する(S808)。光スポットを表面206に制御した後に、個人識別情報領域を探索する(S810)。探索した後に、個人識別情報領域の始端に移動する(S812)。移動した後に、欠陥検出手段148により欠陥の有無を検出し(S814)。欠陥を検出したら、欠陥マッピング手段150は半径位置検出信号により半径位置を記憶し(S816)、回転角位置検出信号により回転角位置を記憶する(S818)。光ディスク102の1回転分でS814からS818を繰り返す(S820)。1回転分の欠陥のマッピングが終了した後に、トラッキング移動手段126またはトラバース132により半径位置を移動する(S822)。なお、移動する距離は50um程度にすると良い。個人識別情報領域の欠陥のマッピングが終了していない(個人識別情報領域の終端に到達していない)場合は、S814に戻る(S824)。終了している場合は、処理を終了する(S826)。
【0087】
S804において、個人識別情報104を読み取る必要があるか否かの判断は方法としては、ユーザーが指定する方法がある。別の方法としては、光ディスク208のように個人識別情報104を付けても良い光ディスクか否か判別する情報が物理情報領域210に記録されている場合には、物理情報領域210を再生して判別する方法がある。
【0088】
S810において、個人識別情報領域を探索する方法としては、トラバース132を光ディスク102の内周から外周まで数mm程度の刻み幅で略水平方向に移動させ、ディスク1回転に現れる欠陥の頻度を検出する方法がある。別の方法としては、光ディスク102に個人識別情報領域が記録されていれば、それが個人識別領域の探索結果となる。別の方法としては、個人識別情報エリア214が設けられている場合は、それが個人識別領域の探索結果となる。
【0089】
S812において、個人識別情報領域を始端に移動する方法としては、トラバース132により光ピックアップ108を略水平方向に移動させる方法がある。
【0090】
以上のように、実施の形態1の光ディスク装置100によれば、個人識別情報104を検出できる。検出された個人識別情報104は2次元の欠陥位置を表す。これに従来からの指紋の特徴点検出を行うと、特徴点が分かり個人を特定できる。特定された個人に基づいて、例えばコンテンツを暗号化し、光ディスク102に暗号化されたコンテンツを記録すれば、光ディスク102に記録されたコンテンツのセキュリティーが向上される。また、表面206にフォーカスを制御するにあたり、球面収差補正レンズ移動手段120のストロークを表面206にまで持たせ球面収差を表面206に合わせることができる。これにより、フォーカスエラー信号の品質が確保でき制御の安定性が向上される。
【0091】
なお、記録層204に球面収差を合わせて、記録層204に光スポットを制御して、同様な処理を行っても、個人識別情報104を検出できる。図16は記録層204にフォーカスを制御した場合における欠陥検出手段148の例を示す。図16は反射光量と、反射光量から欠陥の有無を検出する欠陥検出閾値と、欠陥検出信号を表す。図16は記録層204にフォーカスを制御している場合である。光スポットを指紋の上を通過すると反射光量はパルス状に変化する。
【0092】
図16(a)は反射光量を所定の欠陥検出閾値を用いて欠陥検出信号を生成した場合を表す。指紋はマクロ的に見ると凹凸により紋様を作り出し、領域1602、領域1604、領域1606は指紋での1つ1つの凸部に対応する。凸部に対応して領域1602、領域1604、領域1606でそれぞれ1つの欠陥が検出されることが期待される。しかしながら、図16(a)においては、領域1602で欠陥が検出できていない。これでは、個人識別情報104の検出ができない。
【0093】
図16(b)は反射光量をトップホールド回路(図示しない)に通しトップエンベロープ信号を検出する。また、反射光量をボトムホールド回路(図示しない)によりボトムエンベロープ信号を検出する。トップエンベロープ信号とボトムエンベロープ信号の平均値で欠陥検出閾値を生成し、反射光量と比較して欠陥検出信号を生成した場合である。なお、トップホールド回路(図示しない)のドループゲインやボトムホールド回路(図示しない)のアタックゲインは、個人識別情報104の特徴(例えば指紋では水滴や油滴の大きさ、凸部の間隔)と光ディスク102の回転数とスポットが位置する半径位置から適切に求めれば良い。
【0094】
(実施の形態2)
本発明の実施の形態2に係る光ディスク装置は図1における光ディスク装置100と同じ構成なので説明を省略する。また、前述した実施の形態1と同じ構成については、同じ符号を付し説明を省略する。
【0095】
実施の形態2に係る光ディスク装置100は、個人識別情報領域の近傍で記憶したフォーカス位相補償信号に基づいて個人識別情報領域でフォーカス制御を行う。
【0096】
実施の形態2におけるフォーカス制御手段1002を図10に示す。フォーカス制御手段1002はフォーカスON/OFFスイッチ302、フォーカス位相補償フィルタ304、フォーカス制御信号オフセット手段306、加算器308、及びフォーカス位相補償信号記憶ON/OFFスイッチ1004、フォーカス位相補償信号記憶手段1006、フォーカス制御信号切換手段1008から成る。
【0097】
フォーカス制御信号記録ON/OFFスイッチ1004は、フォーカス位相補償信号をフォーカス位相補償信号記憶手段1006に入力するか否かを制御する。
【0098】
フォーカス位相補償信号記憶手段1006は、フォーカス位相補償信号に基づいてフォーカス位相補償信号記憶値を生成する。フォーカス位相補償信号記憶値はフォーカス位相補償信号記憶信号として出力する。
【0099】
フォーカス制御信号切換手段1008は、フォーカス位相補償信号とフォーカス位相補償信号記憶信号のうち何れか1つを選択して出力する。
【0100】
加算器308は、フォーカス位相補償信号とフォーカス位相補償信号記憶信号のうち何れか1つとフォーカス制御信号オフセットを加算し、フォーカス制御信号を出力する。
【0101】
フォーカス位相補償信号記憶手段1006はフォーカス位相補償信号記憶値を記憶する場合には、フォーカス制御信号記憶ON/OFFスイッチ1004をONにする。フォーカス位相補償信号記憶手段1006は、例えばコントローラ134の内部クロックからディスク1回転をN個の区間に分割する区間分割信号を生成する。区間分割信号に基づいて各々の区間で区間の開始から終了まで位相補償フィルタ信号を所定のフィルタに通し、その区間の終了時の結果をフォーカス位相補償信号記憶値として記憶する。フォーカス位相補償信号記憶手段1006はフォーカス位相補償信号記憶信号を出力する場合には、フォーカス制御信号記憶ON/OFFスイッチ1004をOFFに、フォーカス制御信号切換手段1008をフォーカス位相補償信号記録手段1006側に倒す。フォーカス位相補償信号記憶手段1006は、区間分割信号に基づいて区間に応じてフォーカス位相補償信号記憶値をフォーカス位相補償信号記憶信号として出力する。
【0102】
以上の構成において、実施の形態2に係る光ディスク装置100について図11を参照して説明する。図11は個人識別情報領域の近傍においてフォーカス位相補償記憶信号を記録し、個人情報識別領域においてフォーカス位相補償信号記憶信号を用いてフォーカス制御を行い、表面206に付けた個人識別情報104を検出する方法のフローチャートである。
【0103】
この方法において、個人識別情報104を検出する処理が開始されると(S802)、個人識別情報104を読み取る必要があるか否かを判断する(S804)。個人識別情報104を読み取る必要があると判断されたなら、球面収差補正レンズ移動手段120は球面収差を表面206に合わせる(S806)。S804において個人識別情報104を読み取る必要がないと判断されたら、処理を終了する(S826)。球面収差を合わせた後に、フォーカス制御手段138は光スポットを表面206に制御する(S808)。光スポットを表面206に制御した後に、個人識別情報領域を探索する(S810)。探索した後に、個人識別情報の近傍に移動する(S1102)。近傍に移動した後に、フォーカス位相補償記憶値を生成し、記憶する(S1104)。記憶した後に、個人識別情報領域の始端に移動する(S812)。移動した後に、フォーカス制御信号切換手段1008はスイッチをフォーカス位相補償信号記憶手段1006側に倒し、加算器308の入力をフォーカス位相補償信号記憶信号にする(S1106)。加算器308の入力を切換えた後、欠陥検出手段148により欠陥の有無を検出し(S814)。欠陥を検出したら、欠陥マッピング手段150は半径位置検出信号により半径位置を記憶し(S816)、回転角位置検出信号により回転角位置を記憶する(S818)。光ディスク102の1回転分でS814からS818を繰り返す(S820)。1回転分の欠陥のマッピングが終了した後に、トラッキング移動手段126またはトラバース132により半径位置を移動する(S822)。個人識別情報領域の欠陥のマッピングが終了していない(個人識別情報領域の終端に到達していない)場合は、S814に戻る(S824)。終了している場合は、フォーカス制御信号切換手段1008はスイッチをフォーカス位相補償手段304側に倒し、加算器308の入力をフォーカス位相補償信号にする(S1106)。加算器308の入力を切換えた後、処理を終了する(S826)。
【0104】
以上のように、実施の形態2の光ディスク装置100によれば、個人識別情報領域の近傍で記憶したフォーカス位相補償信号記憶信号に基づいて個人識別情報領域でもフォーカス制御を行うことができる。これにより、個人識別情報104によってフォーカスエラー信号が大きく乱される場合でも、個人識別情報領域での制御の安定性が向上される。
【0105】
(実施の形態3)
本発明の実施の形態3に係る光ディスク装置は図1における光ディスク装置100と同じ構成なので説明を省略する。また、前述した実施の形態1から実施の形態2までと同じ構成については、同じ符号を付し説明を省略する。
【0106】
実施の形態3に係る光ディスク装置100は、個人情報識別領域においてディスク1回転に現れる欠陥の検出頻度に応じてディスクモータ156の回転数を制御する。
【0107】
以上の構成において、実施の形態3に係る光ディスク装置100について図12を参照して説明する。図12は、個人情報識別領域においてディスク1回転に現れる欠陥の検出頻度に応じてディスクモータ156の回転数を制御する方法のフローチャートである。
【0108】
この方法において、個人識別情報104を検出する処理が開始されると(S802)、個人識別情報104を読み取る必要があるか否かを判断する(S804)。個人識別情報104を読み取る必要があると判断されたなら、球面収差補正レンズ移動手段120は球面収差を表面206に合わせる(S806)。S804において個人識別情報104を読み取る必要がないと判断されたら、処理を終了する(S826)。球面収差を合わせた後に、フォーカス制御手段138は光スポットを表面206に制御する(S808)。光スポットを表面206に制御した後に、個人識別情報領域を探索する(S810)。探索した後に、個人識別情報領域の始端に移動する(S812)。移動した後に、欠陥検出手段148により欠陥の有無を検出し(S814)。欠陥を検出したら、欠陥マッピング手段150は半径位置検出信号により半径位置を記憶し(S816)、回転角位置検出信号により回転角位置を記憶する(S818)。光ディスク102の1回転分でS814からS818を繰り返す(S820)。1回転分の欠陥のマッピングが終了した後に、欠陥の検出頻度が所定以上か否かを判別する(S1202)。欠陥の検出頻度が所定以上の場合は、既にディスクモータ156の回転数を上げているか否かを判別する(S1204)。未だ回転数を上げていない場合は、回転数を上げる(S1206)。S1202において欠陥の検出頻度が所定未満の場合、若しくはS1204において欠陥の検出頻度が所定以上であっても既に回転数を上げている場合、若しくはS1206において欠陥の検出頻度が所定以上であって回転数を上げ終わった場合は、トラッキング移動手段126またはトラバース132により半径位置を移動する(S822)。個人識別情報領域の欠陥のマッピングが終了していない(個人識別情報領域の終端に到達していない)場合は、S814に戻る(S824)。終了している場合は、ディスクモータ156の回転数を上げているか否かを判別する(S1208)。上げている場合は、回転数を元に戻す(S1210)。回転数を上げていない場合、若しくは回転数を戻した場合は、処理を終了する(S826)。なお、欠陥の検出頻度以外にも、欠陥の長さが所定以上の場合に同様な処理を行っても良い。
【0109】
以上のように、実施の形態3の光ディスク装置100によれば、ディスク1回転に現れる欠陥の検出頻度に応じてディスクモータ156の回転数を制御することができる。これにより、個人識別情報104による欠陥による外乱が多く制御が大きく揺れる場合であっても、回転数を上げることで外乱の周波数を高くし制御の追従性を悪くすることで、欠陥に振られることなく、個人識別情報領域での制御の安定性が向上される。
【0110】
なお、フォーカス制御のみを行っている場合は、外乱の周波数がフォーカス制御の制御帯域の略10倍以上になるように回転数を設定するのが良い。また、フォーカス制御とトラッキング制御を行っている場合は、外乱の周波数がフォーカス制御の制御帯域とトラッキング制御の制御帯域のうち、何れか高い制御帯域の略10倍以上になるように回転数を設定するのが良い。
【0111】
なお、外乱への制御の追従性を悪くする方法としては、回転数を変更する以外に、フォーカス制御やトラッキング制御の制御帯域を低くしても良い。なお、制御帯域は外乱周波数の10分の1程度にするのが良い。
【0112】
(実施の形態4)
図13は本発明の実施の形態4に係る光ディスク装置1300の構成を示したブロック図である。前述した実施の形態1から実施の形態3までと同じ構成については、同じ符号を付し説明を省略する。
【0113】
実施の形態4に係る光ディスク装置1300は、球面収差を記録層204に適して補正し、表面206にフォーカスを制御し、表面206に付けた個人識別情報104を検出する。
【0114】
光ピックアップ1302は、球面収差補正レンズ1304、球面収差補正レンズ移動手段1306を新たに有する。球面収差補正レンズ1304は、表面206までの球面収差を補正できない。球面収差補正レンズ移動手段1306は、球面収差補正レンズ1304が球面収差を補正できる範囲でのストロークを少なくとも持つ。例えば、球面収差補正レンズ1304が記録層206の近傍のみで球面収差を補正できる場合、球面収差補正レンズ移動手段1306は少なくとも記録層206の近傍のストロークを持てば良い。
【0115】
コントローラ1308は、光量信号生成手段1310と、フォーカス制御手段入力切換手段1312を新たに有する。
【0116】
光量信号生成手段1310は、反射光信号の全てまたは一部の和から光量信号を生成し、出力する。
【0117】
フォーカス制御手段入力切換手段1312は、フォーカスエラー信号と光量信号のうち何れか1つを選択し、フォーカス制御手段138への入力を切換える。
【0118】
フォーカス制御手段138は光スポットの垂直方向が目標位置へ収束するように、入力信号に応じた目標レベルを設定する。目標レベルと入力信号との差分である誤差信号にフォーカス位相補償フィルタ304により位相補償を施し、光スポットを制御する。
【0119】
入力信号が光量信号の場合は、光量信号が一定以上となるように光スポットを制御してもよい。
【0120】
以上の構成において、実施の形態4に係る光ディスク装置1300について、図14を参照して説明する。図14は、球面収差を記録層204に適して補正し、表面206にフォーカスを制御し、表面206に付けた個人識別情報104を検出する方法のフローチャートである。
【0121】
この方法において、個人識別情報104を検出する処理が開始されると(S802)、個人識別情報104を読み取る必要があるか否かを判断する(S804)。個人識別情報104を読み取る必要があると判断されたなら、球面収差補正レンズ移動手段120は球面収差を記録層204に合わせる(S1402)。S804において個人識別情報104を読み取る必要がないと判断されたら、処理を終了する(S826)。球面収差を合わせた後に、表面206でのフォーカスエラー信号の対称性を確認し、フォーカスエラー信号を用いて光スポットを表面206に制御できるか否かを判断する(S1404)。フォーカスエラー信号の対称性が大きい、つまりアンバランスであると制御が不安定となる(図15参照)。フォーカスエラー信号の対称性が所定以上の場合は、フォーカス制御手段入力切換手段1312は、フォーカス制御手段138への入力を光量信号に切換える(S1406)。S1404において、フォーカスエラー信号の対称性が所定未満である場合は、フォーカス制御手段138への入力はフォーカスエラー信号となる。フォーカス制御手段138への入力信号が決まった後に、フォーカス制御手段138は光スポットを表面206に制御する(S808)。光スポットを表面206に制御した後に、個人識別情報領域を探索する(S810)。探索した後に、個人識別情報領域の始端に移動する(S812)。移動した後に、欠陥検出手段148により欠陥の有無を検出し(S814)。欠陥を検出したら、欠陥マッピング手段150は半径位置検出信号により半径位置を記憶し(S816)、回転角位置検出信号により回転角位置を記憶する(S818)。光ディスク102の1回転分でS814からS818を繰り返す(S820)。1回転分の欠陥のマッピングが終了した後に、トラッキング移動手段126またはトラバース132により半径位置を移動する(S822)。個人識別情報領域の欠陥のマッピングが終了していない(個人識別情報領域の終端に到達していない)場合は、S814に戻る(S824)。終了している場合は、処理を終了する(S826)。
【0122】
なお、S1402において、球面収差補正レンズ1304を表面206における球面収差が最良となる位置にしても良い。
【0123】
なお、光ピックアップ108の設計などでフォーカスエラー信号の品質が保障できないと分かっている場合は、S1404の判別を行わず、S1406を実行しても良い。
【0124】
以上のように、実施の形態4の光ディスク装置1300によれば、球面収差補正レンズ1304に表面206までの球面収差を補正できない場合であっても、表面206に光スポットを制御でき、個人識別情報104を検出できる。検出された個人識別情報104は2次元の欠陥位置を表す。これに従来からの指紋の特徴点検出を行うと、特徴点が分かり個人を特定できる。特定された個人に基づいて、例えばコンテンツを暗号化し、光ディスク102に暗号化されたコンテンツを記録すれば、光ディスク102に記録されたコンテンツのセキュリティーが向上される。
【0125】
なお、記録層204にフォーカスを制御した場合に、表面206における光ビームの直径が略50umとなるには、光源110の波長によって以下のような基材厚を持つのが最良である。波長が略780nmの場合は略79um。波長が略650nmの場合は略57um。波長が略405nmの場合は略36um。ただし、これら基材厚の光ディスク102に一般的ではない。一般的な光ディスク102の中では、光ディスク102にBDを、光源110に波長が略780nmのものを組み合わせるのが好適である。
【0126】
(実施の形態5)
図17は本発明の実施の形態5に係る光ディスク装置1700の構成を示したブロック図である。前述した実施の形態1から実施の形態4までと同じ構成については、同じ符号を付し説明を省略する。
【0127】
実施の形態5に係る光ディスク装置1700は、球面収差を記録層204に適して補正し、記録層204にフォーカス制御を行い、記録層204のディスクフォーマットを用いて欠陥の半径位置および回転角位置を検出する。
【0128】
コントローラ1702は、アドレス再生手段1704を新たに有し、欠陥マッピング手段1706を有する。
【0129】
光ディスク1708は回転角位置パターン106を有しない。
【0130】
アドレス再生手段1704は入力信号から光ディスクに物理的に書かれたアドレスを再生する。アドレスは光ディスク102に物理的に記録されたディスクフォーマットに関するものであり、ディスクフォーマットから光ディスク102の半径位置や回転角位置を検出することができる。アドレス再生手段1704は、ディスクフォーマットから検出された半径位置と回転角位置をディスク位置信号として出力する。
【0131】
欠陥マッピング手段1706は、欠陥検出信号、半径位置検出信号、回転角位置検出信号に基づいて、欠陥が検出された半径位置と回転角位置を蓄え、欠陥を2次元でマッピングする。なお、半径位置と回転角位置を蓄える機能は、その全部または一部を外部機器160へ置いても良い。
【0132】
以上の構成において、実施の形態5に係る光ディスク装置1700について、図18を参照して説明する。図18は、球面収差を記録層204に適して補正し、記録層204にフォーカス制御を行い、表面206に付けた個人識別情報104を検出する方法のフローチャートである。
【0133】
この方法において、個人識別情報104を検出する処理が開始されると(S802)、個人識別情報104を読み取る必要があるか否かを判断する(S804)。個人識別情報104を読み取る必要があると判断されたなら、球面収差補正レンズ移動手段120は球面収差を記録層204に合わせる(S1402)。S804において個人識別情報104を読み取る必要がないと判断されたら、処理を終了する(S826)。球面収差を合わせた後に、フォーカス制御手段138は光スポットを記録層204に制御する(S1802)。光スポットを記録層204に制御した後に、所望のトラックにトラッキング制御をする(S1804)。トラッキング制御をした後に、個人識別情報領域を探索する(S1806)。探索した後に、個人識別情報領域の始端に移動する(S1808)。移動した後に、欠陥検出手段148により欠陥の有無を検出し(S814)。欠陥を検出したら、欠陥マッピング手段150はディスク位置信号により半径位置を記憶し(S1810)、ディスク位置信号により回転角位置を記憶する(S1812)。光ディスク102の1回転分でS814からS818を繰り返す(S820)。1回転分の欠陥のマッピングが終了した後に、半径位置を移動する(S1814)。なお、移動する距離は50um程度にすると良い。個人識別情報領域の欠陥のマッピングが終了していない(個人識別情報領域の終端に到達していない)場合は、S814に戻る(S824)。終了している場合は、処理を終了する(S826)。
【0134】
S1806において、個人識別情報領域を探索する方法としては、アドレス再生手段1704から得られるアドレスに従って光ディスク1708の略水平方向に光ピックアップ108を移動させるシーク動作を行って、光ディスク1708の内周から外周まで数mm程度の刻み幅で略水平方向に移動させ、ディスク1回転に現れる欠陥の頻度を検出する方法がある。別の方法としては、光ディスク102に個人識別情報領域が記録されていれば、それが個人識別領域の探索結果となる。別の方法としては、個人識別情報エリア214が設けられている場合は、それが個人識別領域の探索結果となる。
【0135】
S1808において、個人識別情報領域を始端に移動する方法としてはシーク動作がある。
【0136】
S1814において、半径位置を移動する方法としてはシーク動作がある。
【0137】
以上のように、実施の形態5の光ディスク装置1700によれば、光ディスク1708の物理的に書かれた情報によって半径位置と回転角位置を検出でき、光ディスク装置100から構成を一部省略できる。これにより、より安価に光ディスク装置を製造できる。
【0138】
なお、欠陥検出手段148は、前述した図16と同様な欠陥検出方法を用いると、より欠陥検出の性能が向上される。
【0139】
なお、個人識別情報領域でアドレスが検出できない場合は、アドレスが再生できる区間の半径位置と回転角位置に基づいて、アドレスが再生できない区間の半径位置と回転角位置を補間すると良い。
【0140】
なお、トラック追従中にトラッキング制御が所望のトラックから外れた場合は、所望のトラックに戻り欠陥のマッピングを再開する。なお、トラックが外れたことを検出する方法は、トラッキング制御中にトラッキングエラー信号のレベルが所定以上になったことを検出する方法や、再生されたアドレスが期待値を外れたことを検出する方法がある。
【0141】
(実施の形態6)
図19は本発明の実施の形態6に係る光ディスク装置1900の構成を示したブロック図である。前述した実施の形態1から実施の形態5までと同じ構成については、同じ符号を付し説明を省略する。
【0142】
実施の形態6に係る光ディスク装置1900は、欠陥検出にフォーカスエラー信号を用い欠陥厚みを検出し、欠陥マッピング信号に付与して出力する。
【0143】
コントローラ1902は欠陥検出手段1904、欠陥マッピング手段1906を有する。
【0144】
欠陥検出手段1904はフォーカスエラー信号を入力として、フォーカスエラー信号に基づいて欠陥を検出し欠陥検出信号を出力する。さらに、欠陥におけるフォーカスエラー信号の振れのレベルを欠陥厚み信号として出力する。
【0145】
図20はフォーカスエラー信号、フォーカスエラー信号から欠陥の有無を検出する欠陥検出閾値、欠陥検出信号、欠陥厚み信号(Ta、Tb、Tc、Td)を表す。図20では表面206にフォーカスを制御している場合である。光スポットが指紋の上を通過するとフォーカスエラー信号は一方の極性に偏って振れる。これは、ミクロ的に見ると指紋は水滴や油滴によって構成されている。水滴や油滴は数um程度の大きさでフォーカスエラー信号に現れる外乱としては非常に高い。例えば、水滴や油滴が10um、回転数が1000rpm、半径位置が40mmの場合では、約418kHzとなる。それに対して、フォーカス制御が応答可能な周波数は数kHzであり、水滴や油滴には追従しない。故に、水滴や油滴に対応したフォーカスエラー信号が現れる。
【0146】
欠陥検出手段1904の出力である欠陥検出信号と欠陥厚み信号は欠陥マッピング手段1906に入力される。
【0147】
欠陥マッピング手段1906は、欠陥検出信号、半径位置検出信号、回転角位置検出信号、欠陥厚み信号に基づいて、欠陥が検出された半径位置と回転角位置と欠陥厚みを蓄え、欠陥を2次元でマッピングする。マッピングした結果を欠陥マッピング信号として出力する。欠陥マッピング手段1906がマッピングした個人識別情報104の例を図21に示す。図21(a)では欠陥が○部で検出される。欠陥マッピング手段1906は図21(b)のように○部の半径位置と回転角位置と欠陥厚みを蓄える。なお、半径位置と回転角位置と欠陥厚みを蓄える機能は、その全部または一部を外部機器160へ置いても良い。
【0148】
欠陥マッピング手段1906の出力である欠陥マッピング信号は外部機器160へ入力される。外部機器160とは、例えばホストコンピュータである。
【0149】
以上のように、実施の形態6の光ディスク装置1900によれば、欠陥検出にフォーカスエラー信号を用いることで、欠陥マッピング信号に欠陥厚さを付与することができる。
【0150】
(実施の形態7)
本発明の実施の形態7では、光ディスク記録装置/再生装置と、個人識別情報104を管理するサーバとの連携によって、本人の個人識別情報104が付与されている場合にのみ、記録されたコンテンツの再生を行うことのできる光ディスク利用システムについて説明する。前述した実施の形態1から実施の形態6までと同じ構成については、同じ符号を付し説明を省略する。個人識別情報104は個人を識別するための情報であり、例えば指紋や筆跡である。本発明は個人識別情報104が指紋である場合を代表して記載する。
【0151】
図7(a)は、本発明の光ディスク記録装置/再生装置によって抽出される指紋マッピング情報の概念図を示している。また、図7(b)は、図7(a)の指紋マッピング情報である。
【0152】
本実施の形態での指紋マッピング情報とは、図7(b)に示すように、欠陥の半径位置と回転角位置を表したものであり、一種の2値画像データとしても取り扱うことのできる情報である。
【0153】
すなわち、本実施の形態での指紋マッピング情報とは、指紋の2値画像データとしても扱うことができるので、指紋の特徴点検出を行うことによる指紋認証方法は、従来から公知となっている一般的な指紋画像による指紋の特徴点検出や指紋認証をそのまま応用することが可能である。
【0154】
図22は、本実施の形態における光ディスク記録時の動作を示したフローチャートである。本システムでは、光ディスクに付いた指紋情報を読み出す光ディスク記録装置と、光ディスク記録装置とインターネットなど汎用ネットワークで接続された管理サーバとの連動によって、光ディスクにコンテンツを記録する動作の流れを示している。
【0155】
まず、光ディスク記録装置では、光ディスクの特定領域に付与されている光ディスク1枚ごとに識別可能なディスク識別情報を読み出す(S2202)。前記特定領域とは、光ディスクのバーストカッティング領域(BCA)を意味する。通常、著作権保護されたコンテンツを記録するためには、BCAにディスク識別情報が付与された記録型光ディスクを用いる必要がある。本ディスクも、同様に、ディスク内周部のBCAにバーコード上マークによってディスク識別情報が記録されている。
【0156】
次に、光ディスクに付いた指紋情報を2次元でマッピングし、指紋マッピング情報を生成する。(S2204)。これは、前述の実施の形態1に示したように、光ディスクからの反射光の光量変化を利用して欠陥であるかどうかの判定を行い、欠陥と判定された場合には、欠陥として指紋情報が検出される。同時に、欠陥の位置情報(半径位置、回転角位置)を抽出して2次元で指紋マッピングを行う。これを指紋領域に渡って行い、指紋マッピング情報を生成する。
【0157】
S2202によって、指紋マッピング情報の生成が終了した場合には、S2202で読み出したディスク識別情報と、S2204で生成された指紋のマッピング情報とを対応付けて、管理サーバに送信する(S2206)。
【0158】
管理サーバでは、光ディスク記録装置が送信した指紋のマッピング情報を受信する(S2208)。
【0159】
次に、受信した指紋のマッピング情報から指紋の特徴点を探索する(S2210)。この探索方法は、指紋の特徴点である端点や分岐などを抽出して、指紋の特徴点リストを作成する。特徴点リストとは、指紋の特徴点である端点や分岐などの特徴点の識別情報と、その位置情報のリストである。本特徴点は、指紋のマッピング情報のすべての点で探索を行い、抽出されるすべての特徴点をリストアップする(S2212)。
【0160】
また、特徴点の探索方法は、指紋のマッピング情報を画像データとして利用して、公知となっている指紋特徴点抽出を用い実施する。公知となっている指紋特徴点抽出方法は、例えば、http://jp.fujitsu.com/group/labs/techinfo/techguide/list/fingerprint_p05.htmlに記載された方法を用いる。
【0161】
次に、光ディスク記録装置にてコンテンツを暗号化して記録するための暗号鍵を生成する(S2214)。暗号鍵は、受信したディスク識別情報を初期値として生成した擬似乱数系列によって生成される。なお、暗号鍵は、擬似乱数系列でなくても、指紋リスト情報のハッシュ関数出力としてもかまわない。暗号鍵の生成方法は、容易に類推されない方法であればどのような方法でもかまわない。
【0162】
次に、受信した識別情報に対応付けて、生成した特徴点リストを管理データベース(DB)に記憶させる(S2216)。
【0163】
S2216によって管理DBに登録すると、生成した暗号鍵を光ディスク記録装置に送信する(S2218)。この場合、光ディスク記録装置と管理サーバは、秘密の暗号鍵によって暗号化して通信する仮想プライベートネットワークを利用することによって、生成した暗号鍵が第3者に漏洩することを防止することが可能となる。
【0164】
送信された暗号鍵は、光ディスク記録装置に受信される(S2220)。
【0165】
次に、受信した暗号鍵で光ディスクに記録するコンテンツを暗号化し、光ディスクに記録する(S2222)。
【0166】
図23は、図22で説明した光ディスク記録装置と管理サーバの特徴的なブロックを示したブロック図である。
【0167】
本システムは、光ディスク記録装置2300および管理サーバ2302で構成され、光ディスク記録装置2300は、光ピックアップ108、トラバース132、スピンドルモータ156、光ディスク識別情報読出し手段2304、欠陥検出手段148、欠陥マッピング手段150、通信手段2306、暗号化手段2308、変調手段2310および光源照射制御手段2312から構成され、管理サーバ2302は、通信手段2314、特徴点探索手段2316、管理データベース(DB)2318および暗号鍵生成手段2320から構成される。
【0168】
光ディスク識別情報読出し手段2304は、光ディスク2334の内周に位置するBCAに予め記録されているバーコード状記録マークから、ディスクごとに固有のディスク識別情報を読み出す。前記バーコード状マークは、光ディスク製造時に、高出力のYaGレーザなどによって、光ディスク表面の反射金属膜を融解して、除去することによって記録されている。バーコード状マークは光ビーム照射のともなう反射光量の変化によって読み出すことが可能となる。
【0169】
通信手段2306は、指紋マッピング情報送信手段2322と暗号鍵受信手段2324から構成され、汎用ネットワーク2326を介して管理サーバ2302との通信を行う部分であり、指紋マッピング情報送信手段2322によって、抽出した指紋マッピング情報と読み出されたディスク識別情報を管理サーバ2302に送信する。
【0170】
一方、管理サーバ2302の特徴的なブロックについて説明する。
【0171】
通信手段2314は、汎用ネットワーク2326により、光ディスク記録装置2300と接続され、指紋マッピング情報受信手段2328と暗号鍵送信手段2330とから構成される。指紋マッピング情報受信手段2328は、指紋マッピング情報送信手段2322から送信された指紋マッピング情報とディスク識別情報を受信する。
【0172】
特徴点探索手段2316は、受信した指紋マッピング情報から、特徴点リストを生成する。特徴点リストとは、指紋マッピング情報から抽出された指紋の特徴点の識別情報とその位置情報(半径位置、回転角位置)がリストアップされたリストである。また、指紋の特徴点とは、前述のとおり、指紋の分岐や端点であり、指紋マッピング情報から、指紋の分岐や端点を探索し、検出できた場合は、その点の位置情報とともにリストアップする。
【0173】
管理DB(データベース)2318は、特徴点探索手段2316で抽出した特徴点リストをディスク識別情報に関連付けて管理記憶するデータベースである。
【0174】
暗号鍵生成手段2320は、管理DB2318からのディスク識別情報と、内部に持つ擬似乱数系列生成手段2332で生成した乱数系列に基づいて、暗号鍵を生成して生成した暗号鍵を管理DB2318と暗号鍵送信手段2330に出力する。なお、擬似乱数系列生成手段2332は、一般的なM系列生成のためのシフトレジスタなので構成される。本実施の形態では、暗号鍵をディスク識別情報と生成した乱数系列との論理演算あるいは算術演算によって生成するものとする。
【0175】
管理DB2318は、ディスク識別情報に基づいて管理記憶している特徴点リストに加えて、暗号鍵生成手段2320で生成した暗号鍵も、対応するディスク識別情報に関連付けて管理される。
【0176】
暗号鍵送信手段2330は、暗号鍵生成手段2320で生成した暗号鍵を光ディスク記録装置2300に送信する。
【0177】
光ディスク記録装置2300の暗号鍵受信手段2324は、管理サーバ2302から送信される暗号鍵を受信する。
【0178】
暗号化手段2308は、受信した暗号鍵によって、光ディスク2334に記録するコンテンツ情報を暗号化する。本実施形態での暗号化は、一般的なDESやAESなどの秘密鍵暗号が用いられる。
【0179】
変調手段2310は、暗号化手段2308によって暗号化されたコンテンツを光ディスク2334の記録形態に合致する変調を行う。例えば、DVDであれば8−16変調であり、BDでは17pp変調である。
【0180】
光源照射制御手段2312は、光ピックアップ108に搭載されている光源の光源ドライバを含み、変調手段2310からの変調データに基づいて光ディスク2334に記録するための光源強度制御を行う。
【0181】
光ピックアップ108は、光源照射強度制御手段2312で制御された光源強度により光ディスク2334に光ビームを照射することによって光学的に読み取り可能な記録マークを光ディスク2334に形成することによって、暗号化されたコンテンツを光ディスク2334に記録する。
【0182】
図24は、本発明による光ディスク再生装置の処理の流れを示したフローチャートである。
【0183】
まず、光ディスクのBCA(Burst Cutting Area)などの特定領域に記録されているディスク識別情報を読み出す。一般的な光ディスクでは、光ディスク内周のBCA領域にバーコード状の記録マークによって光ディスクの固体識別が可能な光ディスク識別情報が記録されているので、この光ディスク識別情報を、光ディスクの起動直後に読み出す(S2402)。
【0184】
次に、光ディスクに付いた指紋情報を2次元でマッピングし、指紋マッピング情報を生成する。(S2204)。
【0185】
S2202によって、指紋マッピング情報の生成が終了した場合には、S2202で読み出したディスク識別情報と、S2204で生成された指紋のマッピング情報を管理サーバに送信する(S2404)。
【0186】
管理サーバでは、光ディスク再生装置から送信されるディスク識別情報と指紋マッピング情報とを受信する(S2406)。
【0187】
次に、指紋マッピング情報から指紋の特徴点を探索する(S2408)。
【0188】
次に、指紋の特徴点リストを生成する(S2410)。
【0189】
S2408、S2410は、S2210、S2212と同様の処理であり、ここでは詳細な説明は省略する。ただし、特徴点リストはS2212で生成するものより、S2410で生成するものが部分的なものであってもかまわない。S2212における特徴点リストは、指紋マッピング情報に含まれる全ての指紋の中から検出できる全ての特徴点をリストアップするのに対して、S2410では、指紋の特徴点の検出精度などに応じて、検出精度の高いもののみをリストアップしてもかまわない。
【0190】
次に受信したディスク識別情報に基づいて管理DBから登録されている特徴点リストを読み出す(S2412)。
【0191】
次に管理DBから読み出した特徴点リストと受信した特徴点リストを照合する。照合は、特徴点の種別(特徴点識別情報)とその位置情報(半径位置、回転各位置)に基づいて行う。従って、同じ種別の特徴点が、同位置に存在するか否かで照合を行う。また、位置情報は、照合範囲を管理DBに管理されている特徴点リストから許容誤差を含めた範囲で照合することが望ましい(S2414)。
【0192】
次に、照合結果の閾値判定によって所定数以上の特徴点位置の一致が確認されたかどうかを判定する(S2416)。前記所定数とは、本システムによる指紋照合の結果、本人と一致する確率を十分に確保するとともに、他人の指紋を間違えて本人を判定してしまう誤照合の確率を十分小さくするように設定される。
【0193】
S2416の結果、所定数以上の特徴点の一致が確認できない場合(S2416のNo)、照合エラーを光ディスク再生装置に送信する(S2418)。
【0194】
光ディスク再生装置では、照合エラーを受信する(S2420)。
【0195】
次に照合エラーを受信すると、光ディスク再生装置において光ディスクを再生する動作を停止して、処理を中断する(S2422)。
【0196】
一方、S2416で、所定数以上の特徴点の一致が確認できた場合、受信したディスク識別情報に対応した暗号鍵を管理DBから読み出し、光ディスク再生装置に送信する(S2424)。
【0197】
光ディスク再生装置では、管理サーバから送信された暗号鍵を受信する(S2426)。
【0198】
次に、受信した暗号鍵に基づいて、光ディスクから再生した暗号化されたコンテンツを復号化して再生する(S2428)。
【0199】
以上のように、本発明の光ディスク再生装置と管理サーバを用いることによって、光ディスクに付いた指紋情報が本人のものであるかどうかを管理サーバで判定して、照合の結果一致した場合にのみ、光ディスクを再生することのできる暗号鍵を光ディスク再生装置に送信することによって暗号化されたコンテンツを再生することが可能となる。
【0200】
一方、他人の指紋が付いた光ディスクの場合は、指紋情報の照合が不可能となり、光ディスクを再生することが不可能となる。
【0201】
図25は、本発明の光ディスク再生装置2500と管理サーバ2502の特徴的な構成を示したブロック図である。
【0202】
本光ディスク再生装置2500は、光ピックアップ108、トラバース132、スピンドルモータ156、光ピックアップ108、光ディスク識別情報読出し手段2304、欠陥検出手段148、欠陥マッピング手段150、通信手段2504、再生手段2506、復調手段2508および復号化手段2510から構成される。
【0203】
また、管理サーバ2502は、通信手段2512、特徴点探索手段2316、管理DB2514および特徴点リスト照合手段2516から構成される。
【0204】
通信手段2504は、インターネット網などの汎用ネットワーク2326によって管理サーバ2502に接続されており、指紋マッピング情報送信手段2518と暗号鍵受信部2520から構成される。
【0205】
指紋マッピング情報送信手段2518は、欠陥マッピング手段150で生成した指紋マッピング情報と読み出したディスク識別情報を管理サーバ2502に送信する。
【0206】
管理サーバ2502の通信手段2512は、インターネット網など汎用の汎用ネットワーク2326を介して光ディスク再生装置と接続され、指紋マッピング情報受信手段2522と暗号鍵送信手段2524から構成される。
【0207】
指紋マッピング情報受信手段2522は、光ディスク再生装置2500から送信される指紋マッピング情報と光ディスク識別情報を受信する。
【0208】
管理DB2514は、受信した光ディスク識別情報から、対応する特徴点リストと暗号鍵を管理情報として特徴点リスト照合手段2516に出力する。
【0209】
特徴点リスト照合手段2516は、特徴点位置照合手段2526と閾値判定手段2528から構成される。
【0210】
特徴点位置照合手段2526は、管理DB2514に管理されている特徴点リストと受信した特徴点リストの各特徴点リストに記載されている特徴点ごとにその特徴点の識別情報と特徴点の位置情報を照合する。
【0211】
また、閾値判定手段2528では、特徴点位置照合手段2526、特徴点位置の照合結果が合致する特徴点数を閾値判定することによって、指紋情報が認証できたかどうかを判定する。
【0212】
暗号鍵送信手段2524では、閾値判定手段2528の結果、本人の認証が確認できた段階で、汎用ネットワーク2326を介して、受信したディスク識別情報に従って管理DB2514から出力される暗号鍵を光ディスク再生装置2500に送信する。
【0213】
光ディスク再生装置2500の通信手段2504の暗号鍵受信部2520は、管理サーバ2502から送信される暗号鍵を受信する。
【0214】
一方、光ピックアップ108は、光ディスク2334に光ビームを照射し、その反射光から暗号化されたコンテンツ情報を示す読み取り信号を生成する。
【0215】
再生手段2506は、暗号化されたコンテンツ情報を示す読み取り信号をデジタル化して、変調データをデジタル信号として生成する。
【0216】
復調手段2508は、変調データを復調するブロックであり、光ディスク記録装置2300の変調手段2310に対応した復調を行う。
【0217】
復号化手段2510は、暗号化されたコンテンツ情報を受信した暗号鍵で復号化することによってコンテンツを再生する。
【0218】
以上より、本光ディスク再生装置と管理サーバを用いれば、光ディスク表面に付いた指紋情報が本人のものであると認証された場合にのみ、光ディスクに記録されている暗号化されたコンテンツの復号化を行うための暗号鍵が管理サーバから送信され、コンテンツを再生することが可能となる。
【0219】
一方、指紋が付いていない場合や他人の指紋が付いた指紋が認証されない場合には、管理サーバから暗号化されたコンテンツを復号するための暗号鍵情報が送信されないので、結果としてコンテンツを再生することが不可能である。
【0220】
従って、実質的に光ディスク再生装置のコストアップをすることなく、本人のみ使用・閲覧することが望ましいコンテンツや、指紋をふき取るまで有効となる光ディスクなどを実現すること可能となり、光ディスクの応用範囲を広げることが可能となる。
【0221】
図26は、光ディスクに付与される指紋の概念図と、そのときの特徴点リストの形態を示した概念図である。
【0222】
特徴点探索手段2316によって指紋マッピング情報から特徴点を探索した結果、端点としてY1、Y4、Y5が検出され、分岐点としてY2、Y3が検出された例である。
【0223】
このように探索された特徴点は、指紋マッピング情報と対応付けて得られる特徴点の位置情報(半径位置、回転角位置)と対応付け、さらに、特徴点が端点なのか分岐点なのかを示す特徴点識別情報とともに特頂点リストを生成する。
【0224】
したがって、管理サーバ2502の特徴点リスト照合部Y517では、受信した指紋マッピング情報から生成した特徴点リストと、管理DB2514に管理されている特徴点リストを一点一点、特徴点の識別情報とその位置情報とを照合していくことによって、指紋が本人のものであるかの認証を行う。
【0225】
本システムでは、指紋の特徴点探索というきわめて計算コストの高い処理をサーバ側の処理とすることによって、光ディスク再生装置のコストアップ要素を実質的になくすとともに、指紋認証のような高いセキュリティーを実現している。
【0226】
また、本発明では、指紋をセンシングするための特殊なセンサなどは必要とせず、光ディスクの表面に付いた指紋をコンテンツ情報と同じ光学系で検出することが可能である。
【0227】
また、光ディスク再生装置では、指紋位置とその位置情報を2次元マッピングし、指紋の2次元画像情報と等価な情報を生成し、管理サーバでは、指紋マッピング情報と画像データとして用いることによって、一般的な指紋認証手段をそのまま利用することが可能となる。
【0228】
また、実施の形態6に示したような欠陥検出手段1904によって、指紋マッピング情報に欠陥厚みの情報を付与できる。指紋は時間経過により水滴や油滴が蒸発し、厚さが薄くなる。2つの異なる時点の指紋マッピング情報を比較することで時間経過を検出することができ、時間によりコンテンツ再生の可否を制御することが可能となる。
【産業上の利用可能性】
【0229】
本発明による光ディスク装置は、光ディスクに付いた個人識別情報を検出することが可能となり、光ディスクに記録されたコンテンツや光ディスクに接続された機器等のセキュリティー向上に有用である。
【符号の説明】
【0230】
102 光ディスク
104 個人識別情報
106 回転角位置パターン
108 光ピックアップ
110 光源
118 球面収差補正レンズ
120 球面収差補正レンズ移動手段
122 対物レンズ
124 フォーカス移動手段
126 トラッキング移動手段
130 受光手段
132 トラバース
134 コントローラ
136 フォーカスエラー信号生成手段
138 フォーカス制御手段
140 トラッキングエラー信号生成手段
142 トラッキング制御手段
144 再生信号指標生成手段
146 球面収差検出手段
148 欠陥検出手段
150 欠陥マッピング手段
152 半径位置検出手段
154 回転角位置検出手段
156 ディスクモータ
158 回転角位置パターン検出手段
160 外部機器
202 レーベル面
204 記録層
206 表面
210 物理情報領域
214 個人識別情報エリア
304 フォーカス位相補償フィルタ
306 フォーカス制御信号オフセット手段
404 トラッキング位相補償フィルタ
406 トラッキング制御信号オフセット手段
1006 フォーカス位相補償信号記憶手段
1310 光量信号生成手段
1704 アドレス再生手段
1706 欠陥マッピング手段
1904 欠陥検出手段
1906 欠陥マッピング手段
2304 光ディスク識別情報読出し手段
2306 通信手段
2308 暗号手段
2310 変調手段
2312 光源照射制御手段
2314 通信手段
2316 特徴点探索手段
2318 管理データベース
2320 暗号鍵生成手段
2322 指紋マッピング情報送信手段
2324 暗号鍵受信手段
2328 指紋マッピング情報受信手段
2330 暗号鍵送信手段
2332 擬似乱数系列生成手段
2504 通信手段
2506 再生手段
2508 復調手段
2510 復号化手段
2316 特徴点リスト照合手段
2526 特徴点位置照合手段
2528 閾値判定手段
【特許請求の範囲】
【請求項1】
光ディスクの表面に付いた個人識別情報を検出する光ディスク装置において、
前記光ディスクに情報を記録または再生するための光ピックアップと、
前記光ディスクからの反射光を光電変換により反射光信号に変換する受光素子と、
前記反射光信号に基づいてフォーカス信号を生成するフォーカス信号生成手段と、
前記フォーカス信号に基づいて前記光ディスクに光スポットを制御するフォーカス制御信号を生成するフォーカス制御手段と、
前記反射光信号に基づいて反射光の光量変化から欠陥を検出し欠陥検出信号を生成する欠陥検出手段と、
前記光ディスク上の前記光スポットの半径位置を検出し半径位置信号を生成する半径位置検出手段と、
前記光ディスクの回転角位置を検出し回転角位置信号を生成する回転角位置検出手段と、
前記欠陥検出信号と、前記半径位置検出信号と、前記回転位置検出信号とを記憶し欠陥位置を前記光ディスク上の2次元でマッピングする欠陥マッピング手段とを備え、
前記欠陥マッピング手段により前記個人識別情報を2次元でマッピングし前記個人識別情報を検出することを特徴とする光ディスク装置。
【請求項2】
前記フォーカス制御手段は、
前記光ディスクにおける情報が記録された若しくは情報を記録した層とは異なる面であって、前記個人識別情報が付いた前記光ディスクの表面に光スポットを制御する請求項1記載の光ディスク装置。
【請求項3】
前記光ピックアップは、
球面収差補正レンズと、
球面収差補正レンズ移動手段とをさらに備え、
前記球面収差補正レンズが前記光ディスクの表面において球面収差が略ゼロとなるように前記球面収差補正レンズ移動手段を設定する請求項2記載の光ディスク装置。
【請求項4】
前記光ディスクは情報が記録された若しくは情報を記録するための記録層とをさらに備え、
前記フォーカス制御手段は、
前記記録層に光スポットを制御する請求項1記載の光ディスク装置。
【請求項5】
前記欠陥検出手段は、
ボトムホールド回路を備え、
前記反射光信号に基づいた信号を前記ボトムホールド回路に通過させて得られるボトムエンベロープ信号と所定の値とを比較して欠陥検出を行う請求項1記載の光ディスク装置。
【請求項6】
前記欠陥検出手段は、
モノマルチ回路を備え、
前記反射光信号に基づいた信号と所定の値とを比較して欠陥検出をした後にモノマルチ回路に通過させて欠陥検出を所定の時間だけ後ろに延長する請求項1記載の光ディスク装置。
【請求項7】
前記欠陥検出手段は、
トップホールド回路と、
ボトムホールド回路を備え、
前記反射光信号に基づいた信号を前記トップホールド回路に通過させて得られるトップエンベロープ信号と、
前記反射光信号に基づいた信号を前記ボトムホールド回路に通過させて得られるボトムエンベロープ信号と、
前記トップエンベロープ信号と前記ボトムエンベロープ信号に基づいて生成される所定の値と、
前記反射光信号に基づいた信号と前記所定の値とを比較して欠陥検出を行う請求項1記載の光ディスク装置。
【請求項8】
前記光ディスクは情報が記録された若しくは情報を記録するための記録層とをさらに備え、
前記フォーカス信号生成手段は光スポットと前記光ディスクの表面または光スポットと前記記録層との垂直のずれを表すフォーカスエラー信号を生成し、出力する請求項1記載の光ディスク装置。
【請求項9】
前記フォーカス信号生成手段は前記反射光の光量を表す光量信号を生成し、出力する請求項1記載の光ディスク装置。
【請求項10】
前記フォーカス制御手段は、
前記フォーカス信号に位相補償を施したフォーカス位相補償信号を生成し出力するフォーカス位相補償手段と、
前記フォーカス位相補償信号に基づいてフォーカス位相補償信号記憶値を生成し蓄えるフォーカス位相補償信号記憶手段とを備え、
前記個人識別情報が付いた領域ではフォーカス位相補償信号記憶値に基づいてフォーカス制御信号を生成する請求項1記載の光ディスク装置。
【請求項11】
前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースをさらに備え、
前記半径位置検出手段は前記トラバースの位置に基づいて半径位置信号を生成する請求項1記載の光ディスク装置。
【請求項12】
前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、
前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、
前記半径位置検出手段は前記トラッキング移動手段の位置に基づいて半径位置信号を生成する請求項1記載の光ディスク装置。
【請求項13】
前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースとを備え、
前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、
前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、
前記半径位置検出手段は前記トラバースの位置と前記トラッキング移動手段の位置に基づいて半径位置信号を生成する請求項1記載の光ディスク装置。
【請求項14】
前記光ディスクは前記光ディスクの回転角を表す回転角位置パターンを有する請求項1記載の光ディスク装置。
【請求項15】
前記光ディスク装置を制御するコントローラを備え、
前記コントローラが有する内部クロックと、
前記回転角位置パターンを前記光ピックアップにより読み取った結果により前記内部クロックを校正し、
校正した前記内部クロックに基づいて回転角位置を検出する請求項14記載の光ディスク装置。
【請求項16】
前記光ディスク装置は前記光ディスクが物理的に有するアドレスを再生するアドレス再生手段とをさらに備え、
再生されたアドレスに基づいて欠陥の半径位置および回転角位置を検出する請求項4記載の光ディスク装置。
【請求項17】
ディスク1回転あたり欠陥が所定の頻度以上である場合は、前記光ディスクの回転を速くする請求項1記載の光ディスク装置。
【請求項18】
所定の長さ以上の欠陥がある場合は、前記光ディスクの回転を速くする請求項1記載の光ディスク装置。
【請求項19】
ユーザーが前記個人識別情報の検出の開始を指令する請求項1記載の光ディスク装置。
【請求項20】
前記光ディスクは物理情報領域と
前記物理情報領域は前記光ディスクが前記個人識別情報を付けても良い光ディスクか否かを表す情報である個人識別情報用光ディスク識別子とを備え、
前記個人識別情報用光ディスク識別子の有無に基づいて、前記個人識別情報の検出の開始を判断する請求項1記載の光ディスク装置。
【請求項21】
前記個人識別情報の検出を開始した後に、
前記個人識別情報が付いた領域である個人識別情報領域を探索する請求項1記載の光ディスク装置。
【請求項22】
前記光ディスクが書き込み可能な記録型光ディスクであって、
前記個人識別情報が付いた領域である個人識別情報領域の位置が前記記録型光ディスクに記録された請求項1記載の光ディスク装置。
【請求項23】
前記個人識別情報領域の位置に基づいて、前記欠陥マッピング手段はマッピングを開始する請求項21または請求項22記載の光ディスク装置。
【請求項24】
前記個人識別情報を付ける領域である個人識別情報エリアが光ディスク上に明示された請求項1記載の光ディスク装置。
【請求項25】
前記個人識別情報エリアに基づいて、前記欠陥マッピング手段はマッピングを開始する請求項24記載の光ディスク装置。
【請求項26】
光ディスクに情報を記録または再生するための光ピックアップと、
前記光ディスクからの反射光を光電変換により反射光信号に変換する受光素子とを備え、
前記光ディスクの表面に付いた個人識別情報を検出する光ディスク装置において、
前記反射光信号に基づいて前記光ディスクに光スポットを制御するフォーカス制御ステップと、
前記反射光信号に基づいて前記光ディスクの欠陥を検出する欠陥検出ステップと、
前記光ディスク上の前記光スポットの半径位置を検出し半径位置信号を生成する半径位置検出ステップと、
前記光ディスクの回転角位置を検出し回転角位置信号を生成する回転角位置検出ステップと、
前記欠陥検出信号と、前記半径位置検出信号と、前記回転位置検出信号とを記憶し欠陥位置を前記光ディスク上の2次元でマッピングする欠陥マッピングステップとを備え、
前記欠陥マッピングステップにより前記個人識別情報を2次元でマッピングし個人情報を検出する個人識別情報検出方法。
【請求項27】
前記フォーカス制御ステップは、
前記光ディスクにおける情報が記録された若しくは情報を記録した層とは異なる面であって、前記個人識別情報が付いた前記光ディスクの表面に光スポットを制御する請求項26記載の個人識別情報検出方法。
【請求項28】
前記光ピックアップは、
球面収差補正レンズと、
球面収差補正レンズ移動手段とをさらに備え、
前記フォーカス制御ステップにおいて光スポットを制御する前に、
前記球面収差補正レンズが前記光ディスクの表面において球面収差が略ゼロとなるように前記球面収差補正レンズ移動手段を設定する請求項27記載の個人識別情報検出方法。
【請求項29】
前記光ディスクは情報が記録された若しくは情報を記録するための記録層とをさらに備え、
前記フォーカス制御ステップは、
前記光ディスクの前記記録層に光スポットを制御する請求項26記載の個人識別情報検出方法。
【請求項30】
前記欠陥検出ステップは、
前記反射光信号に基づいた信号をボトムホールドした後に得られるボトムエンベロープ信号と所定の値とを比較して欠陥検出を行う請求項26記載の光ディスク個人識別情報検出方法。
【請求項31】
前記欠陥検出ステップは、
前記反射光信号に基づいた信号と所定の値とを比較して欠陥検出をした後に、欠陥検出を所定の時間だけ後ろに延長する請求項26記載の個人識別情報検出方法。
【請求項32】
前記欠陥検出ステップは、
前記反射光信号に基づいた信号をトップホールドした後に得られるトップエンベロープ信号と、
前記反射光信号に基づいた信号をボトムホールドした後に得られるボトムエンベロープ信号と、
前記トップエンベロープ信号と前記ボトムエンベロープ信号に基づいて所定の値を生成し、
前記反射光信号に基づいた信号と前記所定の値とを比較して欠陥検出を行う請求項26記載の個人識別情報検出方法。
【請求項33】
前記光ディスクは情報が記録された若しくは情報を記録するための記録層とをさらに備え、
前記フォーカス制御ステップは、
光スポットと前記光ディスクの表面または光スポットと前記記録層との垂直のずれを表すフォーカスエラー信号を生成し、前記フォーカスエラー信号に基づいて光スポットを制御する請求項26記載の個人識別情報検出方法。
【請求項34】
前記フォーカス制御ステップは、
前記反射光の光量を表す光量信号を生成し、前記光量信号に基づいて光スポットを制御する請求項26記載の個人識別情報検出方法。
【請求項35】
前記個人識別情報が付いていない領域において前記フォーカス制御ステップは光スポットを制御する信号を記憶し、前記個人識別情報が付いた領域において記憶した信号に基づいて光スポットを制御するする請求項26記載の個人識別情報検出方法。
【請求項36】
前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースをさらに備え、
前記半径位置検出ステップは前記トラバースの位置に基づいて半径位置信号を生成する請求項26記載の個人識別情報検出方法。
【請求項37】
前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、
前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、
前記半径位置検出ステップは前記トラッキング移動手段の位置に基づいて半径位置信号を生成する請求項26記載の個人識別情報検出方法。
【請求項38】
前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースとをさらに備え、
前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、
前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、
前記半径位置検出ステップは前記トラバースの位置と前記トラッキング移動手段の位置に基づいて半径位置信号を生成する請求項26記載の個人識別情報検出方法。
【請求項39】
前記光ディスクは前記光ディスクの回転角を表す回転角位置パターンを有し、
前記光ディスク装置を制御するコントローラと、
前記コントローラは内部クロックとを備え、
前記個人識別情報の検出の開始を判断する個人識別情報検出開始ステップと、
前記個人識別情報検出開始ステップの後に前記回転角位置パターンを前記光ピックアップにより読み取った結果により前記内部クロックを校正する内部クロック校正ステップと、
校正した内部クロックに基づいて回転角位置を検出する請求項26記載の個人識別情報検出方法。
【請求項40】
前記光ディスクが物理的に有するアドレスを再生するアドレス再生ステップとをさらに備え、
再生されたアドレスに基づいて前記半径位置検出ステップは欠陥の半径位置を前記回転角位置検出ステップは欠陥の回転角位置を検出する請求項29記載の個人識別情報検出方法。
【請求項41】
ディスク1回転あたり欠陥が所定の頻度を計測する欠陥頻度計測ステップにおいて、欠陥の頻度が所定以上である場合は前記光ディスクの回転を速くする請求項26記載の個人識別情報検出方法。
【請求項42】
所定の長さを計測する欠陥長さ計測ステップにおいて、欠陥の長さが所定以上である場合は前記光ディスクの回転を速くする請求項26記載の個人識別情報検出方法。
【請求項43】
前記個人識別情報の検出の開始を判断する個人識別情報検出開始ステップにおいてユーザーが検出の開始を判断する請求項26記載の個人識別情報検出方法。
【請求項44】
前記光ディスクは物理情報領域と、
前記物理情報領域は前記光ディスクが前記個人識別情報を付けても良い光ディスクか否かを表す情報である個人識別情報用光ディスク識別子とを備え、
前記個人識別情報の検出の開始を判断する個人識別情報検出開始ステップと、
前記個人識別情報用光ディスク識別子の有無を検出する識別子検出ステップと
前記識別子検出ステップの結果に基づいて前記個人識別情報検出開始ステップは前記個人識別情報の検出の開始を判断する請求項26記載の個人識別情報検出方法。
【請求項45】
前記個人識別情報検出開始ステップの後に前記個人識別情報が付いた領域である個人識別情報領域を探索する個人識別情報領域探索ステップを行う請求項26記載の個人識別情報検出方法。
【請求項46】
前記光ディスクが書き込み可能な記録型光ディスクであって、
前記個人識別情報が付いた領域である個人識別情報領域の位置が前記記録型光ディスクに記録され、
前記個人識別情報検出開始ステップの後に前記個人識別情報領域の位置を読み出す個人識別情報領域位置読出ステップを行う請求項26記載の個人識別情報検出方法。
【請求項47】
前記個人識別情報領域の位置に基づいて、前記欠陥マッピングステップはマッピングを開始する請求項45または請求項46記載の個人識別情報検出方法。
【請求項48】
前記光ディスク上に前記個人識別情報を付ける領域である個人識別情報エリアが明示され、
前記個人識別情報エリアに基づいて、前記欠陥マッピングステップはマッピングを開始する請求項26記載の個人識別情報検出方法。
【請求項49】
光ディスクに情報を記録または再生するための光ピックアップと、
前記光ディスクからの反射光を光電変換により反射光信号に変換する受光素子とを備え、
前記光ディスクの表面に付いた個人識別情報を検出する光ディスク装置において、
前記反射光信号に基づいてフォーカス信号を生成するフォーカス信号生成手段と、
前記フォーカス信号に基づいて前記光ディスクに光スポットを制御するフォーカス制御信号を生成するフォーカス制御手段と、
前記反射光信号に基づいて反射光の光量変化から欠陥を検出し欠陥検出信号を生成する欠陥検出手段と、
前記光ディスク上の前記光スポットの半径位置を検出し半径位置信号を生成する半径位置検出手段と、
前記光ディスクの回転角位置を検出し回転角位置信号を生成する回転角位置検出手段と、
前記欠陥検出信号と、前記半径位置検出信号と、前記回転位置検出信号とを記憶し欠陥位置を前記光ディスク上の2次元でマッピングする欠陥マッピング手段とを備え、
前記欠陥マッピング手段により前記個人識別情報を2次元でマッピングし前記個人識別情報を検出する光ディスク装置の半導体集積回路。
【請求項50】
前記フォーカス制御手段は、
前記光ディスクにおける情報が記録された若しくは情報を記録した層とは異なる面であって、前記個人識別情報が着いた前記光ディスクの表面に光スポットを制御する請求項49記載の光ディスク装置の半導体集積回路。
【請求項51】
前記光ピックアップは、
球面収差補正レンズと、
球面収差補正レンズ移動手段とをさらに備え、
前記球面収差補正レンズが前記光ディスクの表面において球面収差が略ゼロとなるように前記球面収差補正レンズ移動手段を設定する請求項49記載の光ディスク装置の半導体集積回路。
【請求項52】
前記光ディスクは情報が記録された若しくは情報を記録するための記録層とをさらに備え、
前記フォーカス制御手段は、
前記記録層に光スポットを制御する請求項49記載の光ディスク装置の半導体集積回路。
【請求項53】
前記欠陥検出手段は、
ボトムホールド回路を備え、
前記反射光信号に基づいた信号を前記ボトムホールド回路に通過させて得られるボトムエンベロープ信号と所定の値とを比較して欠陥検出を行う請求項49記載の光ディスク装置の半導体集積回路。
【請求項54】
前記欠陥検出手段は、
モノマルチ回路を備え、
前記反射光信号に基づいた信号と所定の値とを比較して欠陥検出をした後にモノマルチ回路に通過させて欠陥検出を所定の時間だけ後ろに延長する請求項49記載の光ディスク装置の半導体集積回路。
【請求項55】
前記欠陥検出手段は、
トップホールド回路と、
ボトムホールド回路を備え、
前記反射光信号に基づいた信号を前記トップホールド回路に通過させて得られるトップエンベロープ信号と、
前記反射光信号に基づいた信号を前記ボトムホールド回路に通過させて得られるボトムエンベロープ信号と、
前記トップエンベロープ信号と前記ボトムエンベロープ信号に基づいて生成される所定の値と、
前記反射光信号に基づいた信号と前記所定の値とを比較して欠陥検出を行う請求項49記載の光ディスク装置の半導体集積回路。
【請求項56】
前記光ディスクは情報が記録された若しくは情報を記録するための記録層とをさらに備え、
前記フォーカス信号生成手段は光スポットと前記光ディスクの表面または光スポットと前記記録層との垂直のずれを表すフォーカスエラー信号を生成し、出力する請求項49記載の光ディスク装置の半導体集積回路。
【請求項57】
前記フォーカス信号生成手段は前記反射光の光量を表す光量信号を生成し、出力する請求項49記載の光ディスク装置の半導体集積回路。
【請求項58】
前記フォーカス制御手段は、
前記フォーカス信号に位相補償を施したフォーカス位相補償信号を生成し出力するフォーカス位相補償手段と、
前記フォーカス位相補償信号に基づいてフォーカス位相補償信号記憶値を生成し蓄えるフォーカス位相補償信号記憶手段とを備え、
前記個人識別情報が付いた領域ではフォーカス位相補償信号記憶値に基づいてフォーカス制御信号を生成する請求項49記載の光ディスク装置の半導体集積回路。
【請求項59】
前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースをさらに備え、
前記半径位置検出手段は前記トラバースの位置に基づいて半径位置信号を生成する請求項49記載の光ディスク装置の半導体集積回路。
【請求項60】
前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、
前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、
前記半径位置検出手段は前記トラッキング移動手段の位置に基づいて半径位置信号を生成する請求項49記載の光ディスク装置の半導体集積回路。
【請求項61】
前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースとを備え、
前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、
前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、
前記半径位置検出手段は前記トラバースの位置と前記トラッキング移動手段の位置に基づいて半径位置信号を生成する請求項49記載の光ディスク装置の半導体集積回路。
【請求項62】
前記光ディスクは前記光ディスクの回転角を表す回転角位置パターンを有し、
半導体集積回路が有する内部クロックと
前記回転角位置パターンを前記光ピックアップにより読み取った結果により前記内部クロックを校正し、
校正した内部クロックに基づいて回転角位置を検出する請求項49記載の光ディスク装置の半導体集積回路。
【請求項63】
前記光ディスクが物理的に有するアドレスを再生するアドレス再生手段とをさらに備え、
再生されたアドレスに基づいて欠陥の半径位置および回転角位置を検出する請求項52記載の光ディスク装置の半導体集積回路。
【請求項64】
ディスク1回転あたり欠陥が所定の頻度以上である場合は、前記光ディスクの回転を速くする請求項49記載の光ディスク装置の半導体集積回路。
【請求項65】
所定の長さ以上の欠陥がある場合は、前記光ディスクの回転を速くする請求項49記載の光ディスク装置の半導体集積回路。
【請求項66】
ユーザーからの指令により前記個人識別情報の検出の開始する請求項49記載の光ディスク装置の半導体集積回路。
【請求項67】
前記光ディスクは物理情報領域と、
前記物理情報領域は前記光ディスクが前記個人識別情報を付けても良い光ディスクか否かを表す情報である個人識別情報用光ディスク識別子とをさらに備え、
前記個人識別情報用光ディスク識別子の有無に基づいて、前記個人識別情報の検出の開始を判断する請求項49記載の光ディスク装置の半導体集積回路。
【請求項68】
前記個人識別情報の検出を開始した後に、
前記個人識別情報が付いた領域である個人識別情報領域を探索する請求項49記載の光ディスク装置の半導体集積回路。
【請求項69】
前記光ディスクが書き込み可能な記録型光ディスクであって、
前記個人識別情報が付いた領域である個人識別情報領域の位置が前記記録型光ディスクに記録され、
前記個人識別情報領域の位置を読み出す請求項49記載の光ディスク装置の半導体集積回路。
【請求項70】
前記個人識別情報領域の位置に基づいて、前記欠陥マッピング手段はマッピングを開始する請求項68または請求項69記載の光ディスク装置の半導体集積回路。
【請求項71】
前記光ディスク上に前記個人識別情報を付ける領域である個人識別情報エリアが明示され、
前記個人識別情報エリアに基づいて、前記欠陥マッピングステップはマッピングを開始する請求項49記載の光ディスク装置の半導体集積回路。
【請求項72】
表面と、
前記表面と反対に位置するレーベル面と、
個人識別情報を付ける領域である個人識別情報エリアとを備え、
前記個人識別情報エリアが前記表面または前記レーベル面に配置された光ディスク媒体。
【請求項73】
前記個人識別情報を付けるのに専用の光ディスク媒体か否かを表す情報が記録されている請求項72記載の光ディスク媒体。
【請求項74】
情報を記録された若しくは情報を記録するための記録層と、
前記記録層に物理情報領域とをさらに備え、
前記物理情報領域に前記個人識別情報を付けても良い光ディスク媒体か否かを表す情報が記録されている請求項72記載の光ディスク媒体。
【請求項75】
情報を記録された若しくは情報を記録するための記録層と、
前記記録層に物理情報領域とを備え、
前記物理情報領域には個人識別情報を付けても良い光ディスク媒体か否かを表す情報が記録されている光ディスク媒体。
【請求項76】
光ディスク媒体の回転角を表す回転角位置パターンをさらに備える請求項72記載または請求項75記載の光ディスク媒体。
【請求項1】
光ディスクの表面に付いた個人識別情報を検出する光ディスク装置において、
前記光ディスクに情報を記録または再生するための光ピックアップと、
前記光ディスクからの反射光を光電変換により反射光信号に変換する受光素子と、
前記反射光信号に基づいてフォーカス信号を生成するフォーカス信号生成手段と、
前記フォーカス信号に基づいて前記光ディスクに光スポットを制御するフォーカス制御信号を生成するフォーカス制御手段と、
前記反射光信号に基づいて反射光の光量変化から欠陥を検出し欠陥検出信号を生成する欠陥検出手段と、
前記光ディスク上の前記光スポットの半径位置を検出し半径位置信号を生成する半径位置検出手段と、
前記光ディスクの回転角位置を検出し回転角位置信号を生成する回転角位置検出手段と、
前記欠陥検出信号と、前記半径位置検出信号と、前記回転位置検出信号とを記憶し欠陥位置を前記光ディスク上の2次元でマッピングする欠陥マッピング手段とを備え、
前記欠陥マッピング手段により前記個人識別情報を2次元でマッピングし前記個人識別情報を検出することを特徴とする光ディスク装置。
【請求項2】
前記フォーカス制御手段は、
前記光ディスクにおける情報が記録された若しくは情報を記録した層とは異なる面であって、前記個人識別情報が付いた前記光ディスクの表面に光スポットを制御する請求項1記載の光ディスク装置。
【請求項3】
前記光ピックアップは、
球面収差補正レンズと、
球面収差補正レンズ移動手段とをさらに備え、
前記球面収差補正レンズが前記光ディスクの表面において球面収差が略ゼロとなるように前記球面収差補正レンズ移動手段を設定する請求項2記載の光ディスク装置。
【請求項4】
前記光ディスクは情報が記録された若しくは情報を記録するための記録層とをさらに備え、
前記フォーカス制御手段は、
前記記録層に光スポットを制御する請求項1記載の光ディスク装置。
【請求項5】
前記欠陥検出手段は、
ボトムホールド回路を備え、
前記反射光信号に基づいた信号を前記ボトムホールド回路に通過させて得られるボトムエンベロープ信号と所定の値とを比較して欠陥検出を行う請求項1記載の光ディスク装置。
【請求項6】
前記欠陥検出手段は、
モノマルチ回路を備え、
前記反射光信号に基づいた信号と所定の値とを比較して欠陥検出をした後にモノマルチ回路に通過させて欠陥検出を所定の時間だけ後ろに延長する請求項1記載の光ディスク装置。
【請求項7】
前記欠陥検出手段は、
トップホールド回路と、
ボトムホールド回路を備え、
前記反射光信号に基づいた信号を前記トップホールド回路に通過させて得られるトップエンベロープ信号と、
前記反射光信号に基づいた信号を前記ボトムホールド回路に通過させて得られるボトムエンベロープ信号と、
前記トップエンベロープ信号と前記ボトムエンベロープ信号に基づいて生成される所定の値と、
前記反射光信号に基づいた信号と前記所定の値とを比較して欠陥検出を行う請求項1記載の光ディスク装置。
【請求項8】
前記光ディスクは情報が記録された若しくは情報を記録するための記録層とをさらに備え、
前記フォーカス信号生成手段は光スポットと前記光ディスクの表面または光スポットと前記記録層との垂直のずれを表すフォーカスエラー信号を生成し、出力する請求項1記載の光ディスク装置。
【請求項9】
前記フォーカス信号生成手段は前記反射光の光量を表す光量信号を生成し、出力する請求項1記載の光ディスク装置。
【請求項10】
前記フォーカス制御手段は、
前記フォーカス信号に位相補償を施したフォーカス位相補償信号を生成し出力するフォーカス位相補償手段と、
前記フォーカス位相補償信号に基づいてフォーカス位相補償信号記憶値を生成し蓄えるフォーカス位相補償信号記憶手段とを備え、
前記個人識別情報が付いた領域ではフォーカス位相補償信号記憶値に基づいてフォーカス制御信号を生成する請求項1記載の光ディスク装置。
【請求項11】
前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースをさらに備え、
前記半径位置検出手段は前記トラバースの位置に基づいて半径位置信号を生成する請求項1記載の光ディスク装置。
【請求項12】
前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、
前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、
前記半径位置検出手段は前記トラッキング移動手段の位置に基づいて半径位置信号を生成する請求項1記載の光ディスク装置。
【請求項13】
前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースとを備え、
前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、
前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、
前記半径位置検出手段は前記トラバースの位置と前記トラッキング移動手段の位置に基づいて半径位置信号を生成する請求項1記載の光ディスク装置。
【請求項14】
前記光ディスクは前記光ディスクの回転角を表す回転角位置パターンを有する請求項1記載の光ディスク装置。
【請求項15】
前記光ディスク装置を制御するコントローラを備え、
前記コントローラが有する内部クロックと、
前記回転角位置パターンを前記光ピックアップにより読み取った結果により前記内部クロックを校正し、
校正した前記内部クロックに基づいて回転角位置を検出する請求項14記載の光ディスク装置。
【請求項16】
前記光ディスク装置は前記光ディスクが物理的に有するアドレスを再生するアドレス再生手段とをさらに備え、
再生されたアドレスに基づいて欠陥の半径位置および回転角位置を検出する請求項4記載の光ディスク装置。
【請求項17】
ディスク1回転あたり欠陥が所定の頻度以上である場合は、前記光ディスクの回転を速くする請求項1記載の光ディスク装置。
【請求項18】
所定の長さ以上の欠陥がある場合は、前記光ディスクの回転を速くする請求項1記載の光ディスク装置。
【請求項19】
ユーザーが前記個人識別情報の検出の開始を指令する請求項1記載の光ディスク装置。
【請求項20】
前記光ディスクは物理情報領域と
前記物理情報領域は前記光ディスクが前記個人識別情報を付けても良い光ディスクか否かを表す情報である個人識別情報用光ディスク識別子とを備え、
前記個人識別情報用光ディスク識別子の有無に基づいて、前記個人識別情報の検出の開始を判断する請求項1記載の光ディスク装置。
【請求項21】
前記個人識別情報の検出を開始した後に、
前記個人識別情報が付いた領域である個人識別情報領域を探索する請求項1記載の光ディスク装置。
【請求項22】
前記光ディスクが書き込み可能な記録型光ディスクであって、
前記個人識別情報が付いた領域である個人識別情報領域の位置が前記記録型光ディスクに記録された請求項1記載の光ディスク装置。
【請求項23】
前記個人識別情報領域の位置に基づいて、前記欠陥マッピング手段はマッピングを開始する請求項21または請求項22記載の光ディスク装置。
【請求項24】
前記個人識別情報を付ける領域である個人識別情報エリアが光ディスク上に明示された請求項1記載の光ディスク装置。
【請求項25】
前記個人識別情報エリアに基づいて、前記欠陥マッピング手段はマッピングを開始する請求項24記載の光ディスク装置。
【請求項26】
光ディスクに情報を記録または再生するための光ピックアップと、
前記光ディスクからの反射光を光電変換により反射光信号に変換する受光素子とを備え、
前記光ディスクの表面に付いた個人識別情報を検出する光ディスク装置において、
前記反射光信号に基づいて前記光ディスクに光スポットを制御するフォーカス制御ステップと、
前記反射光信号に基づいて前記光ディスクの欠陥を検出する欠陥検出ステップと、
前記光ディスク上の前記光スポットの半径位置を検出し半径位置信号を生成する半径位置検出ステップと、
前記光ディスクの回転角位置を検出し回転角位置信号を生成する回転角位置検出ステップと、
前記欠陥検出信号と、前記半径位置検出信号と、前記回転位置検出信号とを記憶し欠陥位置を前記光ディスク上の2次元でマッピングする欠陥マッピングステップとを備え、
前記欠陥マッピングステップにより前記個人識別情報を2次元でマッピングし個人情報を検出する個人識別情報検出方法。
【請求項27】
前記フォーカス制御ステップは、
前記光ディスクにおける情報が記録された若しくは情報を記録した層とは異なる面であって、前記個人識別情報が付いた前記光ディスクの表面に光スポットを制御する請求項26記載の個人識別情報検出方法。
【請求項28】
前記光ピックアップは、
球面収差補正レンズと、
球面収差補正レンズ移動手段とをさらに備え、
前記フォーカス制御ステップにおいて光スポットを制御する前に、
前記球面収差補正レンズが前記光ディスクの表面において球面収差が略ゼロとなるように前記球面収差補正レンズ移動手段を設定する請求項27記載の個人識別情報検出方法。
【請求項29】
前記光ディスクは情報が記録された若しくは情報を記録するための記録層とをさらに備え、
前記フォーカス制御ステップは、
前記光ディスクの前記記録層に光スポットを制御する請求項26記載の個人識別情報検出方法。
【請求項30】
前記欠陥検出ステップは、
前記反射光信号に基づいた信号をボトムホールドした後に得られるボトムエンベロープ信号と所定の値とを比較して欠陥検出を行う請求項26記載の光ディスク個人識別情報検出方法。
【請求項31】
前記欠陥検出ステップは、
前記反射光信号に基づいた信号と所定の値とを比較して欠陥検出をした後に、欠陥検出を所定の時間だけ後ろに延長する請求項26記載の個人識別情報検出方法。
【請求項32】
前記欠陥検出ステップは、
前記反射光信号に基づいた信号をトップホールドした後に得られるトップエンベロープ信号と、
前記反射光信号に基づいた信号をボトムホールドした後に得られるボトムエンベロープ信号と、
前記トップエンベロープ信号と前記ボトムエンベロープ信号に基づいて所定の値を生成し、
前記反射光信号に基づいた信号と前記所定の値とを比較して欠陥検出を行う請求項26記載の個人識別情報検出方法。
【請求項33】
前記光ディスクは情報が記録された若しくは情報を記録するための記録層とをさらに備え、
前記フォーカス制御ステップは、
光スポットと前記光ディスクの表面または光スポットと前記記録層との垂直のずれを表すフォーカスエラー信号を生成し、前記フォーカスエラー信号に基づいて光スポットを制御する請求項26記載の個人識別情報検出方法。
【請求項34】
前記フォーカス制御ステップは、
前記反射光の光量を表す光量信号を生成し、前記光量信号に基づいて光スポットを制御する請求項26記載の個人識別情報検出方法。
【請求項35】
前記個人識別情報が付いていない領域において前記フォーカス制御ステップは光スポットを制御する信号を記憶し、前記個人識別情報が付いた領域において記憶した信号に基づいて光スポットを制御するする請求項26記載の個人識別情報検出方法。
【請求項36】
前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースをさらに備え、
前記半径位置検出ステップは前記トラバースの位置に基づいて半径位置信号を生成する請求項26記載の個人識別情報検出方法。
【請求項37】
前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、
前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、
前記半径位置検出ステップは前記トラッキング移動手段の位置に基づいて半径位置信号を生成する請求項26記載の個人識別情報検出方法。
【請求項38】
前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースとをさらに備え、
前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、
前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、
前記半径位置検出ステップは前記トラバースの位置と前記トラッキング移動手段の位置に基づいて半径位置信号を生成する請求項26記載の個人識別情報検出方法。
【請求項39】
前記光ディスクは前記光ディスクの回転角を表す回転角位置パターンを有し、
前記光ディスク装置を制御するコントローラと、
前記コントローラは内部クロックとを備え、
前記個人識別情報の検出の開始を判断する個人識別情報検出開始ステップと、
前記個人識別情報検出開始ステップの後に前記回転角位置パターンを前記光ピックアップにより読み取った結果により前記内部クロックを校正する内部クロック校正ステップと、
校正した内部クロックに基づいて回転角位置を検出する請求項26記載の個人識別情報検出方法。
【請求項40】
前記光ディスクが物理的に有するアドレスを再生するアドレス再生ステップとをさらに備え、
再生されたアドレスに基づいて前記半径位置検出ステップは欠陥の半径位置を前記回転角位置検出ステップは欠陥の回転角位置を検出する請求項29記載の個人識別情報検出方法。
【請求項41】
ディスク1回転あたり欠陥が所定の頻度を計測する欠陥頻度計測ステップにおいて、欠陥の頻度が所定以上である場合は前記光ディスクの回転を速くする請求項26記載の個人識別情報検出方法。
【請求項42】
所定の長さを計測する欠陥長さ計測ステップにおいて、欠陥の長さが所定以上である場合は前記光ディスクの回転を速くする請求項26記載の個人識別情報検出方法。
【請求項43】
前記個人識別情報の検出の開始を判断する個人識別情報検出開始ステップにおいてユーザーが検出の開始を判断する請求項26記載の個人識別情報検出方法。
【請求項44】
前記光ディスクは物理情報領域と、
前記物理情報領域は前記光ディスクが前記個人識別情報を付けても良い光ディスクか否かを表す情報である個人識別情報用光ディスク識別子とを備え、
前記個人識別情報の検出の開始を判断する個人識別情報検出開始ステップと、
前記個人識別情報用光ディスク識別子の有無を検出する識別子検出ステップと
前記識別子検出ステップの結果に基づいて前記個人識別情報検出開始ステップは前記個人識別情報の検出の開始を判断する請求項26記載の個人識別情報検出方法。
【請求項45】
前記個人識別情報検出開始ステップの後に前記個人識別情報が付いた領域である個人識別情報領域を探索する個人識別情報領域探索ステップを行う請求項26記載の個人識別情報検出方法。
【請求項46】
前記光ディスクが書き込み可能な記録型光ディスクであって、
前記個人識別情報が付いた領域である個人識別情報領域の位置が前記記録型光ディスクに記録され、
前記個人識別情報検出開始ステップの後に前記個人識別情報領域の位置を読み出す個人識別情報領域位置読出ステップを行う請求項26記載の個人識別情報検出方法。
【請求項47】
前記個人識別情報領域の位置に基づいて、前記欠陥マッピングステップはマッピングを開始する請求項45または請求項46記載の個人識別情報検出方法。
【請求項48】
前記光ディスク上に前記個人識別情報を付ける領域である個人識別情報エリアが明示され、
前記個人識別情報エリアに基づいて、前記欠陥マッピングステップはマッピングを開始する請求項26記載の個人識別情報検出方法。
【請求項49】
光ディスクに情報を記録または再生するための光ピックアップと、
前記光ディスクからの反射光を光電変換により反射光信号に変換する受光素子とを備え、
前記光ディスクの表面に付いた個人識別情報を検出する光ディスク装置において、
前記反射光信号に基づいてフォーカス信号を生成するフォーカス信号生成手段と、
前記フォーカス信号に基づいて前記光ディスクに光スポットを制御するフォーカス制御信号を生成するフォーカス制御手段と、
前記反射光信号に基づいて反射光の光量変化から欠陥を検出し欠陥検出信号を生成する欠陥検出手段と、
前記光ディスク上の前記光スポットの半径位置を検出し半径位置信号を生成する半径位置検出手段と、
前記光ディスクの回転角位置を検出し回転角位置信号を生成する回転角位置検出手段と、
前記欠陥検出信号と、前記半径位置検出信号と、前記回転位置検出信号とを記憶し欠陥位置を前記光ディスク上の2次元でマッピングする欠陥マッピング手段とを備え、
前記欠陥マッピング手段により前記個人識別情報を2次元でマッピングし前記個人識別情報を検出する光ディスク装置の半導体集積回路。
【請求項50】
前記フォーカス制御手段は、
前記光ディスクにおける情報が記録された若しくは情報を記録した層とは異なる面であって、前記個人識別情報が着いた前記光ディスクの表面に光スポットを制御する請求項49記載の光ディスク装置の半導体集積回路。
【請求項51】
前記光ピックアップは、
球面収差補正レンズと、
球面収差補正レンズ移動手段とをさらに備え、
前記球面収差補正レンズが前記光ディスクの表面において球面収差が略ゼロとなるように前記球面収差補正レンズ移動手段を設定する請求項49記載の光ディスク装置の半導体集積回路。
【請求項52】
前記光ディスクは情報が記録された若しくは情報を記録するための記録層とをさらに備え、
前記フォーカス制御手段は、
前記記録層に光スポットを制御する請求項49記載の光ディスク装置の半導体集積回路。
【請求項53】
前記欠陥検出手段は、
ボトムホールド回路を備え、
前記反射光信号に基づいた信号を前記ボトムホールド回路に通過させて得られるボトムエンベロープ信号と所定の値とを比較して欠陥検出を行う請求項49記載の光ディスク装置の半導体集積回路。
【請求項54】
前記欠陥検出手段は、
モノマルチ回路を備え、
前記反射光信号に基づいた信号と所定の値とを比較して欠陥検出をした後にモノマルチ回路に通過させて欠陥検出を所定の時間だけ後ろに延長する請求項49記載の光ディスク装置の半導体集積回路。
【請求項55】
前記欠陥検出手段は、
トップホールド回路と、
ボトムホールド回路を備え、
前記反射光信号に基づいた信号を前記トップホールド回路に通過させて得られるトップエンベロープ信号と、
前記反射光信号に基づいた信号を前記ボトムホールド回路に通過させて得られるボトムエンベロープ信号と、
前記トップエンベロープ信号と前記ボトムエンベロープ信号に基づいて生成される所定の値と、
前記反射光信号に基づいた信号と前記所定の値とを比較して欠陥検出を行う請求項49記載の光ディスク装置の半導体集積回路。
【請求項56】
前記光ディスクは情報が記録された若しくは情報を記録するための記録層とをさらに備え、
前記フォーカス信号生成手段は光スポットと前記光ディスクの表面または光スポットと前記記録層との垂直のずれを表すフォーカスエラー信号を生成し、出力する請求項49記載の光ディスク装置の半導体集積回路。
【請求項57】
前記フォーカス信号生成手段は前記反射光の光量を表す光量信号を生成し、出力する請求項49記載の光ディスク装置の半導体集積回路。
【請求項58】
前記フォーカス制御手段は、
前記フォーカス信号に位相補償を施したフォーカス位相補償信号を生成し出力するフォーカス位相補償手段と、
前記フォーカス位相補償信号に基づいてフォーカス位相補償信号記憶値を生成し蓄えるフォーカス位相補償信号記憶手段とを備え、
前記個人識別情報が付いた領域ではフォーカス位相補償信号記憶値に基づいてフォーカス制御信号を生成する請求項49記載の光ディスク装置の半導体集積回路。
【請求項59】
前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースをさらに備え、
前記半径位置検出手段は前記トラバースの位置に基づいて半径位置信号を生成する請求項49記載の光ディスク装置の半導体集積回路。
【請求項60】
前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、
前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、
前記半径位置検出手段は前記トラッキング移動手段の位置に基づいて半径位置信号を生成する請求項49記載の光ディスク装置の半導体集積回路。
【請求項61】
前記光ディスク装置は前記光ピックアップを略水平方向に移動させるトラバースとを備え、
前記光ピックアップは光ビームを収束させ光スポットを形成する対物レンズと、
前記対物レンズを略水平方向に移動させるトラッキング移動手段とを備え、
前記半径位置検出手段は前記トラバースの位置と前記トラッキング移動手段の位置に基づいて半径位置信号を生成する請求項49記載の光ディスク装置の半導体集積回路。
【請求項62】
前記光ディスクは前記光ディスクの回転角を表す回転角位置パターンを有し、
半導体集積回路が有する内部クロックと
前記回転角位置パターンを前記光ピックアップにより読み取った結果により前記内部クロックを校正し、
校正した内部クロックに基づいて回転角位置を検出する請求項49記載の光ディスク装置の半導体集積回路。
【請求項63】
前記光ディスクが物理的に有するアドレスを再生するアドレス再生手段とをさらに備え、
再生されたアドレスに基づいて欠陥の半径位置および回転角位置を検出する請求項52記載の光ディスク装置の半導体集積回路。
【請求項64】
ディスク1回転あたり欠陥が所定の頻度以上である場合は、前記光ディスクの回転を速くする請求項49記載の光ディスク装置の半導体集積回路。
【請求項65】
所定の長さ以上の欠陥がある場合は、前記光ディスクの回転を速くする請求項49記載の光ディスク装置の半導体集積回路。
【請求項66】
ユーザーからの指令により前記個人識別情報の検出の開始する請求項49記載の光ディスク装置の半導体集積回路。
【請求項67】
前記光ディスクは物理情報領域と、
前記物理情報領域は前記光ディスクが前記個人識別情報を付けても良い光ディスクか否かを表す情報である個人識別情報用光ディスク識別子とをさらに備え、
前記個人識別情報用光ディスク識別子の有無に基づいて、前記個人識別情報の検出の開始を判断する請求項49記載の光ディスク装置の半導体集積回路。
【請求項68】
前記個人識別情報の検出を開始した後に、
前記個人識別情報が付いた領域である個人識別情報領域を探索する請求項49記載の光ディスク装置の半導体集積回路。
【請求項69】
前記光ディスクが書き込み可能な記録型光ディスクであって、
前記個人識別情報が付いた領域である個人識別情報領域の位置が前記記録型光ディスクに記録され、
前記個人識別情報領域の位置を読み出す請求項49記載の光ディスク装置の半導体集積回路。
【請求項70】
前記個人識別情報領域の位置に基づいて、前記欠陥マッピング手段はマッピングを開始する請求項68または請求項69記載の光ディスク装置の半導体集積回路。
【請求項71】
前記光ディスク上に前記個人識別情報を付ける領域である個人識別情報エリアが明示され、
前記個人識別情報エリアに基づいて、前記欠陥マッピングステップはマッピングを開始する請求項49記載の光ディスク装置の半導体集積回路。
【請求項72】
表面と、
前記表面と反対に位置するレーベル面と、
個人識別情報を付ける領域である個人識別情報エリアとを備え、
前記個人識別情報エリアが前記表面または前記レーベル面に配置された光ディスク媒体。
【請求項73】
前記個人識別情報を付けるのに専用の光ディスク媒体か否かを表す情報が記録されている請求項72記載の光ディスク媒体。
【請求項74】
情報を記録された若しくは情報を記録するための記録層と、
前記記録層に物理情報領域とをさらに備え、
前記物理情報領域に前記個人識別情報を付けても良い光ディスク媒体か否かを表す情報が記録されている請求項72記載の光ディスク媒体。
【請求項75】
情報を記録された若しくは情報を記録するための記録層と、
前記記録層に物理情報領域とを備え、
前記物理情報領域には個人識別情報を付けても良い光ディスク媒体か否かを表す情報が記録されている光ディスク媒体。
【請求項76】
光ディスク媒体の回転角を表す回転角位置パターンをさらに備える請求項72記載または請求項75記載の光ディスク媒体。
【図1】


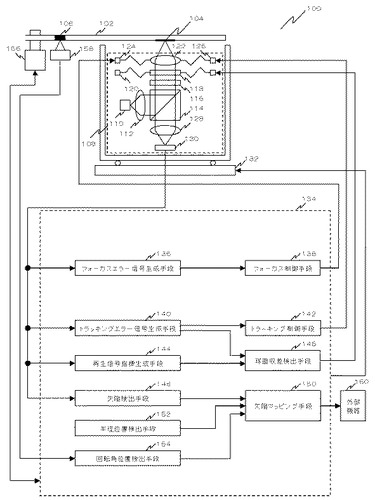
【図2】
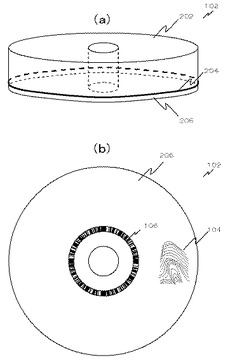
【図3】
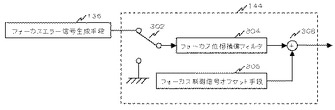
【図4】
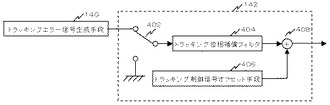
【図5】
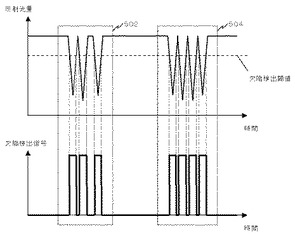
【図6】
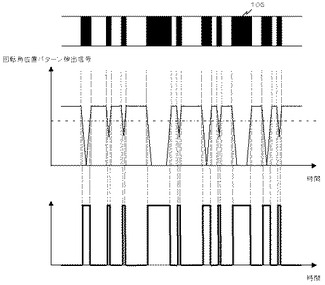
【図7】
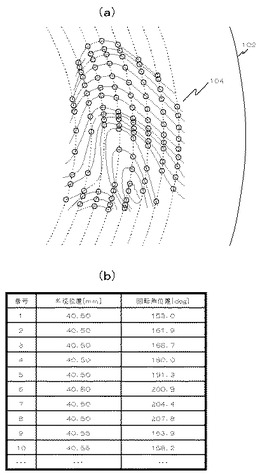
【図8】
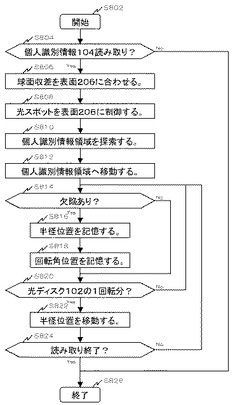
【図9】
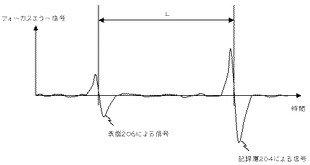
【図10】
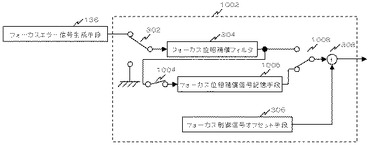
【図11】
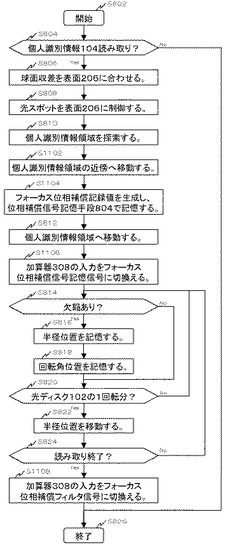
【図12】
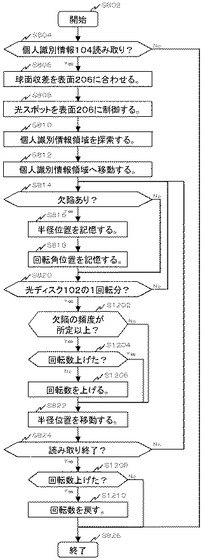
【図13】
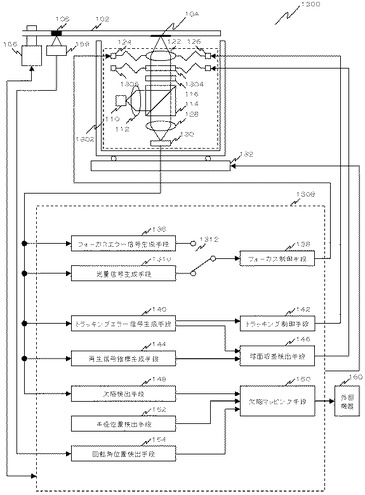
【図14】
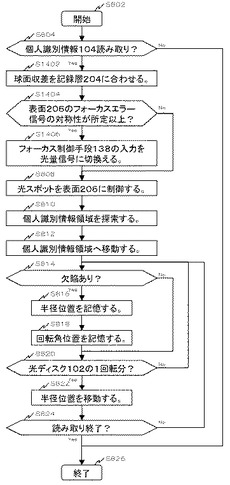
【図15】
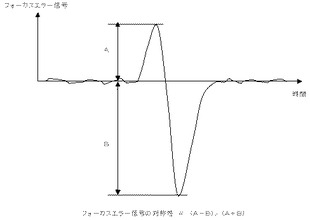
【図16】
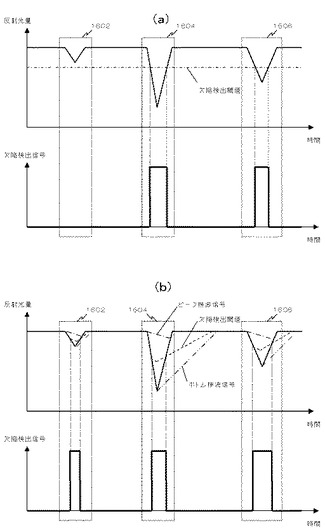
【図17】
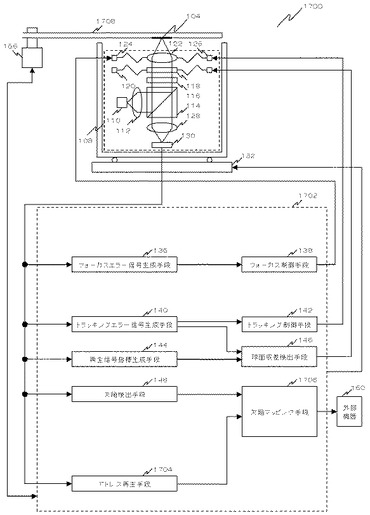
【図18】
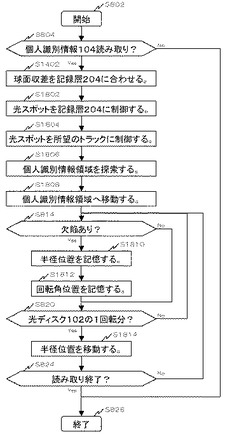
【図19】
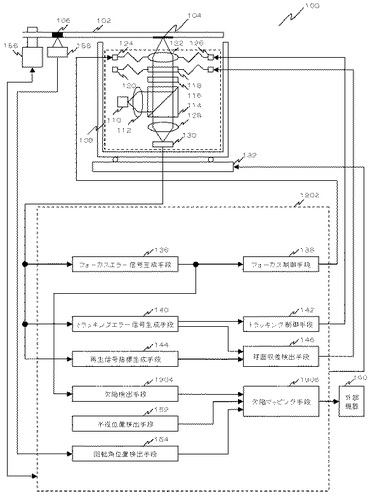
【図20】
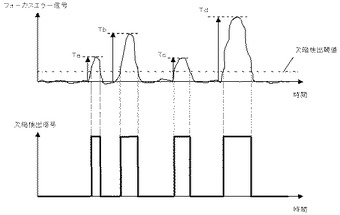
【図21】
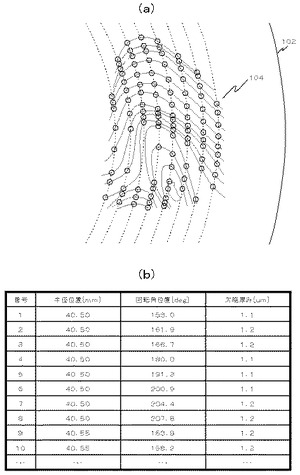
【図22】
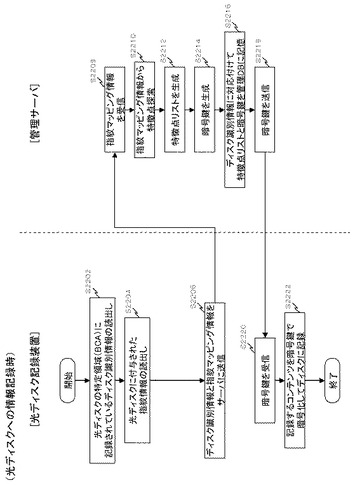
【図23】
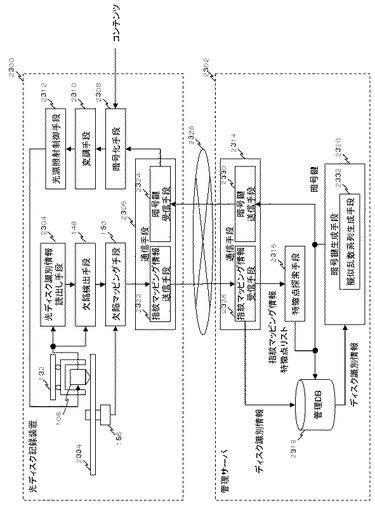
【図24】
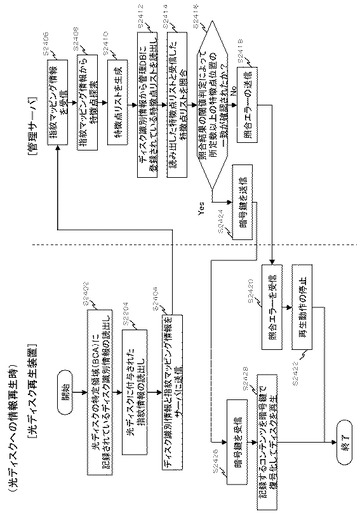
【図25】
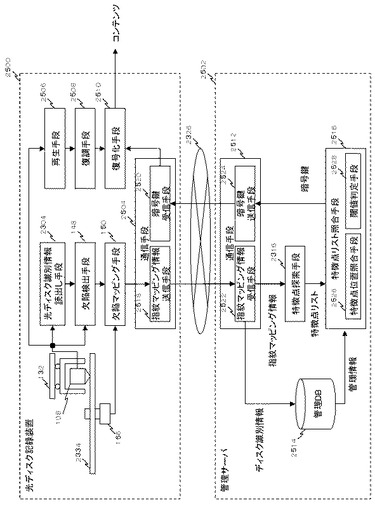
【図26】
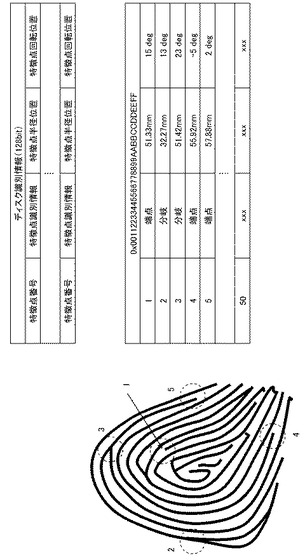
【図27】
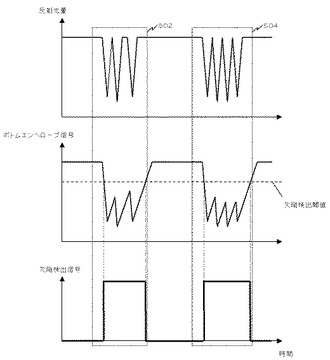
【図28】
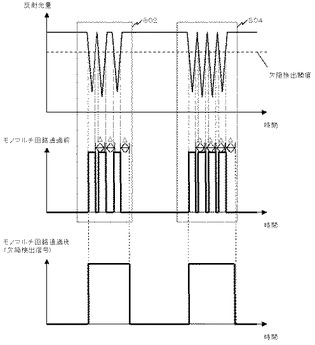
【図29】
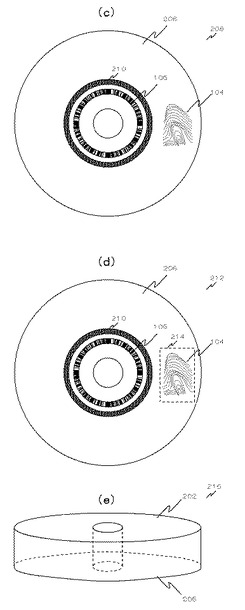
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【公開番号】特開2011−96310(P2011−96310A)
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願番号】特願2009−248717(P2009−248717)
【出願日】平成21年10月29日(2009.10.29)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願日】平成21年10月29日(2009.10.29)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]