
個体の1つまたは複数の関節運動に基づく1つまたは複数の信号を使用して、固体の位置変化と決定する方法及び装置
1つの例で装置は、個体の1つまたは複数の関節移動に基づいて1つまたは複数の信号を生成する1つまたは複数のセンサと、個体の位置の変化を決定するために1つまたは複数の信号のうちの1つまたは複数を使用する1つまたは複数の処理装置とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一例として、一般に検知に関し、より詳細には移動検知に関する。
【背景技術】
【0002】
本出願は、米国仮出願第60/418,119号(Robert E.Stewart、「STRAIN SENSOR EMPLOYMENT OF JOINT MOTION TO DETERMINE LOCATION OF BODY」、2002年10月11日出願)の優先権を主張するものである。
【0003】
慣性航法システム(「INS」)および汎地球測位システム(「GPS」)は個体についての位置情報を生成する。慣性航法システムと汎地球測位システムとは相補的な位置情報を生成する。汎地球測位システムによって生成された位置情報は、何らかの測定について慣性航法システムによって生成された位置情報を修正するのに使用されてもよい。慣性航法システムによって生成された位置情報は、汎地球測位システムによって衛星の再捕捉の間に使用されてもよい。
【0004】
フィルタ(例えばカルマン・フィルタ)が、慣性航法システムおよび汎地球測位システムから受信した位置情報を比較考量し、組み合わせるために使用される。個体についての位置情報の精度は、慣性航法システムおよび汎地球測位システムの信頼度および有効度に左右される。慣性航法システムまたは汎地球測位システムのいずれかが信頼できなくなる、および/または有効でなくなる場合、フィルタによって決定される位置情報は精度が落ちる。慣性航法システムおよび汎地球測位システムが両方とも信頼できなくなる、および/または有効でなくなる場合、位置情報が生成されることはない。
【0005】
1つの欠点として、慣性航法システムには時間とともに増す位置の誤差(例えばドリフト)がある。操作の経過時間が増すにつれて、慣性航法システムによって生成された位置情報は精度が落ちる。操作の経過時間が慣性航法システムのドリフト処理能力に比べて長い時がある。そのような時にはフィルタによって決定される位置情報は精度が落ちる。
【0006】
その他の欠点として、汎地球測位システムが電波妨害または混信のために有効でなくなる時がある。そのような時にはフィルタによって決定される位置情報は精度が落ちる。
さらに別の欠点として、初期化および/または再初期化で、慣性航法システムは個体の位置情報を生成し始めるために開始および/または再開始位置を必要とする。開始および/または再開始位置の外部入力がないと、慣性航法システムは航行を開始することができない。また、初期化および/または再初期化で、初期化および/または再初期化の開始と汎地球測位システムが航行を開始できる時との間に遅滞も生じている。この遅滞は、初期化および/または再初期化で汎地球測位システムの開始および/または再開始位置が有効である場合に軽減される。正確な開始および/または再開始位置は有効でない時がある。
【特許文献1】米国仮出願第60/418,119号
【発明の開示】
【課題を解決するための手段】
【0007】
本発明は1つの実施態様で装置を含む。装置は個体の1つまたは複数の関節の移動に基づいて1つまたは複数の信号を生成する1つまたは複数のセンサと、個体の位置変化を決定するために1つまたは複数の信号のうちの1つまたは複数を使用する1つまたは複数の処理部品とを含む。
【0008】
本発明のその他の実施態様は方法を含む。個体の1つまたは複数の関節の1つまたは複数の移動が測定される。この1つまたは複数の移動が個体の位置変化に変換される。
本発明のさらに別の実施態様は物品(article)を含む。物品はコンピュータ可読の信号保持媒体を含む。物品は媒体中で、個体の1つまたは複数の関節の1つまたは複数の移動を測定するための手段を含む。物品は媒体中で、1つまたは複数の移動を個体の位置変化に変換するための手段を含む。
本発明の例示的実施態様の特徴は、説明および添付の図面から明らかとなろう。
【発明を実施するための最良の形態】
【0009】
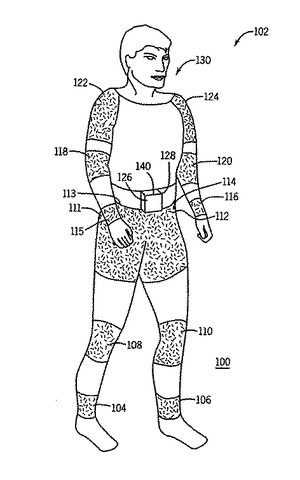
図1を参照すると、1つの例で装置100は主体、例えば個体の移動を測定するための1つまたは複数のセンサおよび処理部品を含む。1つまたは複数のセンサは、個体の1つまたは複数の関節上に都合良く配置されている。1つまたは複数のセンサは、1つまたは複数の方位で1つまたは複数の関節の移動を測定する。処理部品は、1つまたは複数の関節の移動を個体の総体的な移動に変換(例えば計算、転換、推測、演繹、決定および/または外挿)する。総体的な移動とは個体の全体の移動を表す。装置100は、複数のハードウェアおよび/またはソフトウェア部品を含む。そのような部品のいくつかは、装置100の中で組み合わせられるか、または分離されてよい。
【0010】
1つの例で、装置100は少なくとも1つのコンピュータ可読の信号保持媒体を使用する。装置100のためのコンピュータ可読の信号保持媒体の1つの例は、1つまたは複数の磁気式、電気式、光学式、生物学的および原子的データ記憶媒体などの記録可能なデータ記憶媒体201(図2)の例を含む。別の例で、装置100のためのコンピュータ可読の信号保持媒体は、装置100を含むか、または装置100に接続された、例えば1つまたは複数の電話網、ローカル・エリア・ネットワーク(「LAN」)、インターネットおよび無線ネットワークのようなネットワークを介して伝送される変調された搬送信号を含む。装置100の例示的部品は、当業者によって理解されるように、任意の数のプログラミング言語で書き込まれるか、または実行される一組および/または一連のコンピュータ命令を使用および/または包含する。
【0011】
1つの例で、装置100は主体のための人体測定による推測航法移動検知機(anthropometric dead reckoning motion detector)を含む。1つの例の中での本明細書で使用する「人体測定による(anthropometric)」とは、主体を測定することを指す。1つの例の中での本明細書で使用する「推測航法(dead reckoning)」とは、既知の地点から辿った進路および距離を測定することによる航行のことを指す。1つの例で主体は個体102を含む。例えば、個体102は人間、動物またはロボットを含む。人体測定による推測航法移動検知機は個体102の測定値を取り込み、その測定値を既知の場所から始まる位置変化に変換する。
【0012】
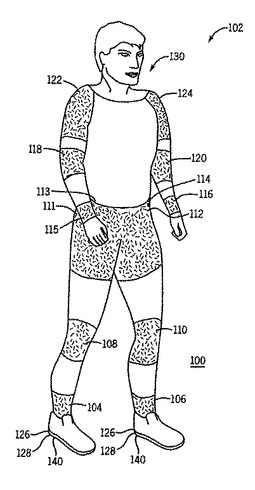
装置100は、例えば1つまたは複数の、左右の足首センサ104および106、膝センサ108および110、腰回りセンサ111および112、胴回りセンサ113および114、手首センサ115および116、肘センサ118および120、肩センサ122および124、処理部品126ならびに航行部品128のような、1つまたは複数のセンサを含む。1つの例で、上記センサのうちの1つまたは複数は本明細書で説明するように歪みセンサを含む。別の例で、センサのうちの1つまたは複数は、例えば低コスト速度センサ(low cost rate sensors)のような速度センサを含む。1つまたは複数のセンサは個体102の1つまたは複数の関節の移動の測定に役立つ。例えば、1つまたは複数のセンサは、個体102の足首、膝、腰回り、胴回り、手首、肘および/または肩などの1つまたは複数の関節の三次元の移動を測定する。
【0013】
個体102が既知の開始場所から経路を通過すると、装置100は個体102の1つまたは複数の関節の移動の測定を行い、移動を記録するのに役立つ。続いて、個体102の1つまたは複数の関節の移動は固体102の経路を決定するために再構築される。
【0014】
1つまたは複数のセンサは個体102上で左右に配置される。1つまたは複数のセンサは個体102上で対称または非対称に配置されてもよい。1つまたは複数のセンサは個体102の足首、膝、腰回り、胴回り、手首、肘および/または肩の他にも、別の関節の場所を測定してよい。個体102の下半身の1つ以上の関節を監視する1つまたは複数のセンサは、個体102の歩行移動を再構築するために情報を提供する。例えば、足首センサ104および106、膝センサ108および110、腰回りセンサ111および112、ならびに胴回りセンサ113および114によって生成された情報は、個体102の歩行移動に変換される。1つまたは複数のセンサによって生成された情報はまた、急な方向転換または高度の変化などの経路沿いの重要な地点を測定するために変換されてもよい。
【0015】
1つまたは複数のセンサは移動の方位や変位を測定する。1つの例で、第1センサは移動の方位を測定し、第2センサは移動の変位を測定する。別の例で、第1および第2センサは移動の変位と方位の両方を測定する。
【0016】
1つまたは複数のセンサは歪みセンサを含む。歪みセンサは、個体102の1つまたは複数の関節の移動による屈曲の歪みおよび/または捻じれの歪みを検知する。例えば、足首センサ104および106は、足首の関節の移動による屈曲の歪みおよび/または捻じれの歪みを検知する。屈曲の歪みは移動の変位(例えばメートル)に対応し、それに変換されてもよい。捻じれの歪みは移動の方位(例えば度)に対応し、それに変換されてもよい。
【0017】
1つの例で、1つまたは複数のセンサは個体102の1つまたは複数の関節でスーツ130の中に埋め込まれる。スーツ130は個体102に着用される。スーツ130は上着、下着として着用されるか、または他のスーツに組み込まれてもよい。スーツ130は、個体102の生物的機能(例えば心拍数、体温等)のような他の情報を監視するために使用される第2のスーツに組み込まれてもよい。
【0018】
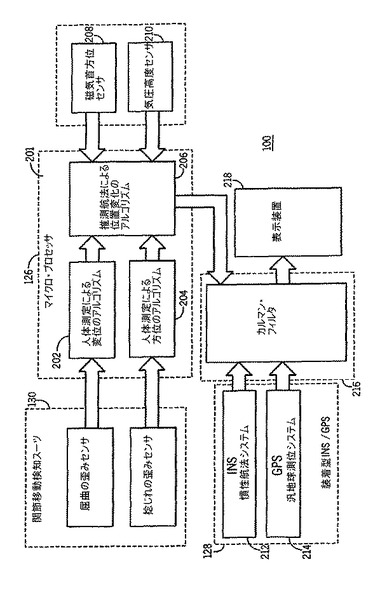
図1から2を参照すると、処理部品126は1つまたは複数のセンサからの測定値を個体102の位置変化に変換するために、1つまたは複数のアルゴリズムを使用する。第1アルゴリズム202は、1つまたは複数のセンサが感知した歪みの屈曲成分を入力として取り込む。第1アルゴリズム202は屈曲成分を位置の変化の変位成分に変換する。第2アルゴリズム204は1つまたは複数のセンサが感知した歪みの捻じれ成分を入力として取り込む。第2アルゴリズム204は捻じれ成分を位置変化の方位成分に変換する。第3アルゴリズム206は位置の変化の変位成分、方位成分および開始場所を入力として取り込む。第3アルゴリズム206は位置変化の変位成分、方位成分および開始場所を個体102の更新された位置に変換する。1つまたは複数のアルゴリズムおよび1つまたは複数のセンサは、個体102に既知の経路を通らせることによって個体102の特定の移動に対して調整されてもよい。既知の経路を通る間に1つまたは複数のセンサによって生成された測定値は、1つまたは複数のアルゴリズムを個体102の特定の移動に対して調整する。第1、第2および第3アルゴリズムは組み合わせられるか、または分離されてよい。
【0019】
第3アルゴリズム206は追加的に、磁気首方位センサ208および気圧高度センサ210からの入力を取り込んでもよい。磁気首方位センサ208は、個体102の移動の方位に関する追加の情報を提供して歪みセンサの捻じれ成分を補足する。磁気首方位センサ208は、地球の磁界を利用して移動の方位を感知する。磁気首方位センサ208によって測定される磁界の変化は、個体102による方位の変化に対応する。気圧高度センサ210は高度の位置変化のために大気圧を測定する。気圧高度センサ210によって測定される大気圧の変化は、個体102による高度の変化に対応する。磁気首方位センサ208および気圧高度センサ210によって生成される位置情報は、個体102の1つまたは複数の関節が移動していないときの個体102の移動の間に、人体測定による推測航法移動検知機を助ける。第3アルゴリズム206は、磁気首方位センサ208および気圧高度センサ210によって生成された位置情報を、第1アルゴリズム202および第2アルゴリズム204によって生成された位置情報とともに比較考量し、組み合わせる。
【0020】
1つの例で航行部品128は、慣性航法システム212(「INS」)および/または汎地球測位システム214(「GPS」)を含む。航行部品128は個体102の位置情報を提供して処理部品126によって生成された位置情報を補足する。1つの例で、航行部品128は個体102の胴回りに取り付けられる。例えば、航行部品128は個体102のためにベルトに内蔵される。
【0021】
図4を参照すると、別の例で航行部品128は個体102の足のかかとに配置されている。例えば、航行部分128は個体102の履く靴やブーツの中に取り付けられる。追加的に、処理部品126およびその他の電子部品は個体102が履く靴の中に航行部品128とともに配置されてもよい。航行部品128を靴の中に配置することで、航行部品128のために速度ゼロの更新または位置変化ゼロの更新が可能になる。例えば、個体102の足が止まっているか、または実質的に静止しているときに、航行部品128は速度ゼロの更新を始めて航行部品128の測定値の誤差または偏りを修正する。
【0022】
図1から2を参照すると、フィルタリング部品216は処理部品126、慣性航法システム212および汎地球測位システム214によって生成された位置情報を比較考量し、組み合わせるためのアルゴリズムを含む。位置情報の比較考量および組合せは処理部品126、慣性航法システム212および汎地球測位システム214のそれぞれの信頼度に基づく。システムの動作の測定値の時系列と合わせてシステムおよび測定値の誤差の特徴を示す統計モデルと初期状態の情報とを用いて、アルゴリズムは処理部品126、慣性航法システム212および汎地球測位システム214の測定値を処理して個体102の位置の推定値を演繹する。1つの例で、フィルタリング部品216はカルマン・フィルタを含む。1つの例で、処理部品126およびフィルタリング部品216は、例えば慣性航法システム212の中で航行部品128と組み合わせられる。フィルタリング部品216の出力は、表示装置218および記録装置140の1つまたは複数に伝えられてもよい。
【0023】
記録装置140は、フィルタリング部品216からの位置情報の出力を保存する。個体102の経路は既知の開始場所および記録された位置情報から再構築されてもよい。経路は以前に地図化されていない地域、正しく地図化されていない地域の地図を作成するか、または古い地図を更新するために使用されてもよい。地図製作のための情報を提供する推測航法による航行を使用することは、汎地球測位システム214が利用できない遠隔の地域か、または汎地球測位システム214が電波妨害や混信に遭う地域で特に有効である。
【0024】
初期化および/または再初期化で、慣性航法システム212は個体102の位置情報の生成を始めるために開始および/または再開場所を必要とする。処理部品126によって生成される推測航法の位置情報は、慣性航法システム212のために開始および/または再開始場所の推定値として使用されてもよい。初期化および/または再初期化で、汎地球測位システム214は衛星を追跡するのに開始および/または再開始位置から利益を受ける。処理部品126によって生成される推測航法の位置情報は、汎地球測位システム214のために開始および/または再開始場所の推定値として使用されてもよい。
【0025】
実行時間の間、慣性航法システム212および汎地球測位システム214は、1つまたは複数のセンサおよび/または処理部品126に修正を与えてもよい。したがって、慣性航法システム212、汎地球測位システム214および処理部品126によって生成される位置情報はさらに一致する。修正によって、慣性航法システム212および/または汎地球測位システム214が利用できなくなったとき、処理部品126は位置情報の推定値を単独で生成することがさらに可能になる。
【0026】
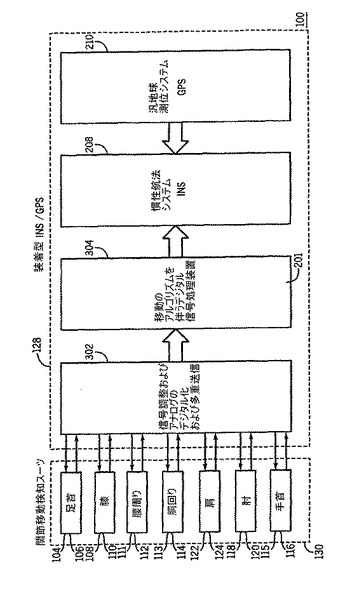
図3を参照すると、1つの例で航行部品128は信号調整部品302、信号処理装置304、ならびに慣性航法システム212および汎地球測位システム214のゼロまたは複数を含む。スーツ130の1つまたは複数のセンサは情報を航行部品128に伝える。信号調整部品302は1つまたは複数のセンサから情報を受信する。信号調整部品302は1つまたは複数のアナログ信号からの情報を1つまたは複数のデジタル信号に変換する。1つまたは複数のデジタル信号は、個体102の1つまたは複数の関節の移動を表す。1つまたは複数のデジタル信号は信号処理装置304に多重送信される。信号処理装置304は1つまたは複数のデジタル信号を個体102の位置情報に変換する。信号処理装置304および汎地球測位システム214から得られた個体102の位置情報は慣性航法システム212に伝えられる。慣性航法システム212は、内部で生成された位置情報、ならびに汎地球測位システム214および信号処理装置304によって生成された位置情報を比較考量し、組み合わせるためのアルゴリズムを含む。
【0027】
本明細書で説明された工程または操作は例示的なものに過ぎない。本発明の精神から逸脱することのない、これらの工程または操作の変形形態は数多く存在しよう。例えば、工程は異なる順序で実施されてもよく、または工程は追加、削除されるか、変更されてもよい。
【0028】
本発明の例示的実施態様を本明細書で詳細に示し、説明してきたが、本発明の精神から逸脱することなく様々な変更、追加および代用等がなされ、したがってこれらは本発明の範囲内にあるということは当業者には理解されよう。
【図面の簡単な説明】
【0029】
【図1】1つまたは複数のセンサ、処理部品および航行部品を含む装置の1つの例示的実施態様を表す図である。
【図2】図1の装置により使用可能な1つの例示的流れ図である。
【図3】図1の装置により使用可能な別の例示的流れ図である。
【技術分野】
【0001】
本発明は、一例として、一般に検知に関し、より詳細には移動検知に関する。
【背景技術】
【0002】
本出願は、米国仮出願第60/418,119号(Robert E.Stewart、「STRAIN SENSOR EMPLOYMENT OF JOINT MOTION TO DETERMINE LOCATION OF BODY」、2002年10月11日出願)の優先権を主張するものである。
【0003】
慣性航法システム(「INS」)および汎地球測位システム(「GPS」)は個体についての位置情報を生成する。慣性航法システムと汎地球測位システムとは相補的な位置情報を生成する。汎地球測位システムによって生成された位置情報は、何らかの測定について慣性航法システムによって生成された位置情報を修正するのに使用されてもよい。慣性航法システムによって生成された位置情報は、汎地球測位システムによって衛星の再捕捉の間に使用されてもよい。
【0004】
フィルタ(例えばカルマン・フィルタ)が、慣性航法システムおよび汎地球測位システムから受信した位置情報を比較考量し、組み合わせるために使用される。個体についての位置情報の精度は、慣性航法システムおよび汎地球測位システムの信頼度および有効度に左右される。慣性航法システムまたは汎地球測位システムのいずれかが信頼できなくなる、および/または有効でなくなる場合、フィルタによって決定される位置情報は精度が落ちる。慣性航法システムおよび汎地球測位システムが両方とも信頼できなくなる、および/または有効でなくなる場合、位置情報が生成されることはない。
【0005】
1つの欠点として、慣性航法システムには時間とともに増す位置の誤差(例えばドリフト)がある。操作の経過時間が増すにつれて、慣性航法システムによって生成された位置情報は精度が落ちる。操作の経過時間が慣性航法システムのドリフト処理能力に比べて長い時がある。そのような時にはフィルタによって決定される位置情報は精度が落ちる。
【0006】
その他の欠点として、汎地球測位システムが電波妨害または混信のために有効でなくなる時がある。そのような時にはフィルタによって決定される位置情報は精度が落ちる。
さらに別の欠点として、初期化および/または再初期化で、慣性航法システムは個体の位置情報を生成し始めるために開始および/または再開始位置を必要とする。開始および/または再開始位置の外部入力がないと、慣性航法システムは航行を開始することができない。また、初期化および/または再初期化で、初期化および/または再初期化の開始と汎地球測位システムが航行を開始できる時との間に遅滞も生じている。この遅滞は、初期化および/または再初期化で汎地球測位システムの開始および/または再開始位置が有効である場合に軽減される。正確な開始および/または再開始位置は有効でない時がある。
【特許文献1】米国仮出願第60/418,119号
【発明の開示】
【課題を解決するための手段】
【0007】
本発明は1つの実施態様で装置を含む。装置は個体の1つまたは複数の関節の移動に基づいて1つまたは複数の信号を生成する1つまたは複数のセンサと、個体の位置変化を決定するために1つまたは複数の信号のうちの1つまたは複数を使用する1つまたは複数の処理部品とを含む。
【0008】
本発明のその他の実施態様は方法を含む。個体の1つまたは複数の関節の1つまたは複数の移動が測定される。この1つまたは複数の移動が個体の位置変化に変換される。
本発明のさらに別の実施態様は物品(article)を含む。物品はコンピュータ可読の信号保持媒体を含む。物品は媒体中で、個体の1つまたは複数の関節の1つまたは複数の移動を測定するための手段を含む。物品は媒体中で、1つまたは複数の移動を個体の位置変化に変換するための手段を含む。
本発明の例示的実施態様の特徴は、説明および添付の図面から明らかとなろう。
【発明を実施するための最良の形態】
【0009】
図1を参照すると、1つの例で装置100は主体、例えば個体の移動を測定するための1つまたは複数のセンサおよび処理部品を含む。1つまたは複数のセンサは、個体の1つまたは複数の関節上に都合良く配置されている。1つまたは複数のセンサは、1つまたは複数の方位で1つまたは複数の関節の移動を測定する。処理部品は、1つまたは複数の関節の移動を個体の総体的な移動に変換(例えば計算、転換、推測、演繹、決定および/または外挿)する。総体的な移動とは個体の全体の移動を表す。装置100は、複数のハードウェアおよび/またはソフトウェア部品を含む。そのような部品のいくつかは、装置100の中で組み合わせられるか、または分離されてよい。
【0010】
1つの例で、装置100は少なくとも1つのコンピュータ可読の信号保持媒体を使用する。装置100のためのコンピュータ可読の信号保持媒体の1つの例は、1つまたは複数の磁気式、電気式、光学式、生物学的および原子的データ記憶媒体などの記録可能なデータ記憶媒体201(図2)の例を含む。別の例で、装置100のためのコンピュータ可読の信号保持媒体は、装置100を含むか、または装置100に接続された、例えば1つまたは複数の電話網、ローカル・エリア・ネットワーク(「LAN」)、インターネットおよび無線ネットワークのようなネットワークを介して伝送される変調された搬送信号を含む。装置100の例示的部品は、当業者によって理解されるように、任意の数のプログラミング言語で書き込まれるか、または実行される一組および/または一連のコンピュータ命令を使用および/または包含する。
【0011】
1つの例で、装置100は主体のための人体測定による推測航法移動検知機(anthropometric dead reckoning motion detector)を含む。1つの例の中での本明細書で使用する「人体測定による(anthropometric)」とは、主体を測定することを指す。1つの例の中での本明細書で使用する「推測航法(dead reckoning)」とは、既知の地点から辿った進路および距離を測定することによる航行のことを指す。1つの例で主体は個体102を含む。例えば、個体102は人間、動物またはロボットを含む。人体測定による推測航法移動検知機は個体102の測定値を取り込み、その測定値を既知の場所から始まる位置変化に変換する。
【0012】
装置100は、例えば1つまたは複数の、左右の足首センサ104および106、膝センサ108および110、腰回りセンサ111および112、胴回りセンサ113および114、手首センサ115および116、肘センサ118および120、肩センサ122および124、処理部品126ならびに航行部品128のような、1つまたは複数のセンサを含む。1つの例で、上記センサのうちの1つまたは複数は本明細書で説明するように歪みセンサを含む。別の例で、センサのうちの1つまたは複数は、例えば低コスト速度センサ(low cost rate sensors)のような速度センサを含む。1つまたは複数のセンサは個体102の1つまたは複数の関節の移動の測定に役立つ。例えば、1つまたは複数のセンサは、個体102の足首、膝、腰回り、胴回り、手首、肘および/または肩などの1つまたは複数の関節の三次元の移動を測定する。
【0013】
個体102が既知の開始場所から経路を通過すると、装置100は個体102の1つまたは複数の関節の移動の測定を行い、移動を記録するのに役立つ。続いて、個体102の1つまたは複数の関節の移動は固体102の経路を決定するために再構築される。
【0014】
1つまたは複数のセンサは個体102上で左右に配置される。1つまたは複数のセンサは個体102上で対称または非対称に配置されてもよい。1つまたは複数のセンサは個体102の足首、膝、腰回り、胴回り、手首、肘および/または肩の他にも、別の関節の場所を測定してよい。個体102の下半身の1つ以上の関節を監視する1つまたは複数のセンサは、個体102の歩行移動を再構築するために情報を提供する。例えば、足首センサ104および106、膝センサ108および110、腰回りセンサ111および112、ならびに胴回りセンサ113および114によって生成された情報は、個体102の歩行移動に変換される。1つまたは複数のセンサによって生成された情報はまた、急な方向転換または高度の変化などの経路沿いの重要な地点を測定するために変換されてもよい。
【0015】
1つまたは複数のセンサは移動の方位や変位を測定する。1つの例で、第1センサは移動の方位を測定し、第2センサは移動の変位を測定する。別の例で、第1および第2センサは移動の変位と方位の両方を測定する。
【0016】
1つまたは複数のセンサは歪みセンサを含む。歪みセンサは、個体102の1つまたは複数の関節の移動による屈曲の歪みおよび/または捻じれの歪みを検知する。例えば、足首センサ104および106は、足首の関節の移動による屈曲の歪みおよび/または捻じれの歪みを検知する。屈曲の歪みは移動の変位(例えばメートル)に対応し、それに変換されてもよい。捻じれの歪みは移動の方位(例えば度)に対応し、それに変換されてもよい。
【0017】
1つの例で、1つまたは複数のセンサは個体102の1つまたは複数の関節でスーツ130の中に埋め込まれる。スーツ130は個体102に着用される。スーツ130は上着、下着として着用されるか、または他のスーツに組み込まれてもよい。スーツ130は、個体102の生物的機能(例えば心拍数、体温等)のような他の情報を監視するために使用される第2のスーツに組み込まれてもよい。
【0018】
図1から2を参照すると、処理部品126は1つまたは複数のセンサからの測定値を個体102の位置変化に変換するために、1つまたは複数のアルゴリズムを使用する。第1アルゴリズム202は、1つまたは複数のセンサが感知した歪みの屈曲成分を入力として取り込む。第1アルゴリズム202は屈曲成分を位置の変化の変位成分に変換する。第2アルゴリズム204は1つまたは複数のセンサが感知した歪みの捻じれ成分を入力として取り込む。第2アルゴリズム204は捻じれ成分を位置変化の方位成分に変換する。第3アルゴリズム206は位置の変化の変位成分、方位成分および開始場所を入力として取り込む。第3アルゴリズム206は位置変化の変位成分、方位成分および開始場所を個体102の更新された位置に変換する。1つまたは複数のアルゴリズムおよび1つまたは複数のセンサは、個体102に既知の経路を通らせることによって個体102の特定の移動に対して調整されてもよい。既知の経路を通る間に1つまたは複数のセンサによって生成された測定値は、1つまたは複数のアルゴリズムを個体102の特定の移動に対して調整する。第1、第2および第3アルゴリズムは組み合わせられるか、または分離されてよい。
【0019】
第3アルゴリズム206は追加的に、磁気首方位センサ208および気圧高度センサ210からの入力を取り込んでもよい。磁気首方位センサ208は、個体102の移動の方位に関する追加の情報を提供して歪みセンサの捻じれ成分を補足する。磁気首方位センサ208は、地球の磁界を利用して移動の方位を感知する。磁気首方位センサ208によって測定される磁界の変化は、個体102による方位の変化に対応する。気圧高度センサ210は高度の位置変化のために大気圧を測定する。気圧高度センサ210によって測定される大気圧の変化は、個体102による高度の変化に対応する。磁気首方位センサ208および気圧高度センサ210によって生成される位置情報は、個体102の1つまたは複数の関節が移動していないときの個体102の移動の間に、人体測定による推測航法移動検知機を助ける。第3アルゴリズム206は、磁気首方位センサ208および気圧高度センサ210によって生成された位置情報を、第1アルゴリズム202および第2アルゴリズム204によって生成された位置情報とともに比較考量し、組み合わせる。
【0020】
1つの例で航行部品128は、慣性航法システム212(「INS」)および/または汎地球測位システム214(「GPS」)を含む。航行部品128は個体102の位置情報を提供して処理部品126によって生成された位置情報を補足する。1つの例で、航行部品128は個体102の胴回りに取り付けられる。例えば、航行部品128は個体102のためにベルトに内蔵される。
【0021】
図4を参照すると、別の例で航行部品128は個体102の足のかかとに配置されている。例えば、航行部分128は個体102の履く靴やブーツの中に取り付けられる。追加的に、処理部品126およびその他の電子部品は個体102が履く靴の中に航行部品128とともに配置されてもよい。航行部品128を靴の中に配置することで、航行部品128のために速度ゼロの更新または位置変化ゼロの更新が可能になる。例えば、個体102の足が止まっているか、または実質的に静止しているときに、航行部品128は速度ゼロの更新を始めて航行部品128の測定値の誤差または偏りを修正する。
【0022】
図1から2を参照すると、フィルタリング部品216は処理部品126、慣性航法システム212および汎地球測位システム214によって生成された位置情報を比較考量し、組み合わせるためのアルゴリズムを含む。位置情報の比較考量および組合せは処理部品126、慣性航法システム212および汎地球測位システム214のそれぞれの信頼度に基づく。システムの動作の測定値の時系列と合わせてシステムおよび測定値の誤差の特徴を示す統計モデルと初期状態の情報とを用いて、アルゴリズムは処理部品126、慣性航法システム212および汎地球測位システム214の測定値を処理して個体102の位置の推定値を演繹する。1つの例で、フィルタリング部品216はカルマン・フィルタを含む。1つの例で、処理部品126およびフィルタリング部品216は、例えば慣性航法システム212の中で航行部品128と組み合わせられる。フィルタリング部品216の出力は、表示装置218および記録装置140の1つまたは複数に伝えられてもよい。
【0023】
記録装置140は、フィルタリング部品216からの位置情報の出力を保存する。個体102の経路は既知の開始場所および記録された位置情報から再構築されてもよい。経路は以前に地図化されていない地域、正しく地図化されていない地域の地図を作成するか、または古い地図を更新するために使用されてもよい。地図製作のための情報を提供する推測航法による航行を使用することは、汎地球測位システム214が利用できない遠隔の地域か、または汎地球測位システム214が電波妨害や混信に遭う地域で特に有効である。
【0024】
初期化および/または再初期化で、慣性航法システム212は個体102の位置情報の生成を始めるために開始および/または再開場所を必要とする。処理部品126によって生成される推測航法の位置情報は、慣性航法システム212のために開始および/または再開始場所の推定値として使用されてもよい。初期化および/または再初期化で、汎地球測位システム214は衛星を追跡するのに開始および/または再開始位置から利益を受ける。処理部品126によって生成される推測航法の位置情報は、汎地球測位システム214のために開始および/または再開始場所の推定値として使用されてもよい。
【0025】
実行時間の間、慣性航法システム212および汎地球測位システム214は、1つまたは複数のセンサおよび/または処理部品126に修正を与えてもよい。したがって、慣性航法システム212、汎地球測位システム214および処理部品126によって生成される位置情報はさらに一致する。修正によって、慣性航法システム212および/または汎地球測位システム214が利用できなくなったとき、処理部品126は位置情報の推定値を単独で生成することがさらに可能になる。
【0026】
図3を参照すると、1つの例で航行部品128は信号調整部品302、信号処理装置304、ならびに慣性航法システム212および汎地球測位システム214のゼロまたは複数を含む。スーツ130の1つまたは複数のセンサは情報を航行部品128に伝える。信号調整部品302は1つまたは複数のセンサから情報を受信する。信号調整部品302は1つまたは複数のアナログ信号からの情報を1つまたは複数のデジタル信号に変換する。1つまたは複数のデジタル信号は、個体102の1つまたは複数の関節の移動を表す。1つまたは複数のデジタル信号は信号処理装置304に多重送信される。信号処理装置304は1つまたは複数のデジタル信号を個体102の位置情報に変換する。信号処理装置304および汎地球測位システム214から得られた個体102の位置情報は慣性航法システム212に伝えられる。慣性航法システム212は、内部で生成された位置情報、ならびに汎地球測位システム214および信号処理装置304によって生成された位置情報を比較考量し、組み合わせるためのアルゴリズムを含む。
【0027】
本明細書で説明された工程または操作は例示的なものに過ぎない。本発明の精神から逸脱することのない、これらの工程または操作の変形形態は数多く存在しよう。例えば、工程は異なる順序で実施されてもよく、または工程は追加、削除されるか、変更されてもよい。
【0028】
本発明の例示的実施態様を本明細書で詳細に示し、説明してきたが、本発明の精神から逸脱することなく様々な変更、追加および代用等がなされ、したがってこれらは本発明の範囲内にあるということは当業者には理解されよう。
【図面の簡単な説明】
【0029】
【図1】1つまたは複数のセンサ、処理部品および航行部品を含む装置の1つの例示的実施態様を表す図である。
【図2】図1の装置により使用可能な1つの例示的流れ図である。
【図3】図1の装置により使用可能な別の例示的流れ図である。
【特許請求の範囲】
【請求項1】
個体の1つまたは複数の関節移動に基づいて1つまたは複数の信号を生成する1つまたは複数のセンサと、
前記個体の位置変化を決定するために前記1つまたは複数の信号のうちの1つまたは複数を使用する1つまたは複数の処理部品とを含む装置。
【請求項2】
前記1つまたは複数のセンサは1つまたは複数の歪みセンサを含む請求項1に記載の装置。
【請求項3】
前記1つまたは複数の歪みセンサは前記個体の関節に隣接する歪みセンサを含み、前記歪みセンサは前記1つまたは複数の関節移動のうちの関節の関節移動に応じて歪みを感知し、
前記歪みセンサは前記1つまたは複数の信号のうちの信号中で歪み情報として前記歪みを表し、
前記1つまたは複数の処理部品のうちの1つまたは複数は、前記歪み情報を前記個体の前記位置変化に変換する請求項2に記載の装置。
【請求項4】
前記1つまたは複数の歪みセンサのうちの歪みセンサは、前記個体の関節の屈曲を検知し、前記歪みセンサは前記1つまたは複数の信号のうちの信号中で歪み情報として前記屈曲を表し、
前記1つまたは複数の処理部品のうちの1つまたは複数は、前記個体の前記位置変化の変位を決定するために前記歪み情報を使用する請求項2に記載の装置。
【請求項5】
前記1つまたは複数の歪みセンサのうちの歪みセンサは、前記個体の関節の捻じれを検知し、前記歪みセンサは前記1つまたは複数の信号のうちの信号中で歪み情報として前記捻じれを表し、
前記1つまたは複数の処理部品のうちの1つまたは複数は、前記個体の前記位置変化の方位を決定するために前記歪み情報を使用する請求項2に記載の装置。
【請求項6】
前記1つまたは複数の歪みセンサのうちの第1歪みセンサは、前記個体の第1の関節の屈曲を検知し、前記第1歪みセンサは前記1つまたは複数の信号のうちの第1信号中で第1歪み情報として前記屈曲を表し、
前記1つまたは複数の処理部品のうちの1つまたは複数は、前記個体の前記位置変化の変位を決定するために前記第1歪み情報を使用し、
前記1つまたは複数の歪みセンサのうちの第2歪みセンサは、前記個体の第2の関節の捻じれを検知し、前記2歪みセンサは前記1つまたは複数の信号のうちの第2信号中で第2歪み情報として前記捻じれを表し、
前記1つまたは複数の処理部品のうちの1つまたは複数は、前記個体の前記位置変化の方位を決定するために前記第2歪み情報を用い、
前記1つまたは複数の処理部品のうちの1つまたは複数は、前記個体の更新された位置を決定するために前記個体の前記位置変化の変位、前記位置変化の方位および既知の開始場所を使用する請求項2に記載の装置。
【請求項7】
前記個体の前記1つまたは複数の関節移動に基づく前記1つまたは複数の処理部品によって決定される前記位置変化と、
1つまたは複数の補足的な航行部品からの位置情報と
を比較考量し、組み合わせるフィルタ部品をさらに含む請求項1に記載の装置。
【請求項8】
前記補足的な航行部品は汎地球測位システム(「GPS」)および慣性航法システム(「INS」)の1つまたは複数を含み、
前記フィルタ部品は、前記1つまたは複数の処理部品および前記補足的な航行部品の相対的な信頼度に基づいて前記1つまたは複数の処理部品および前記補足的な航行部品からの位置情報を比較考量し、組み合わせる請求項7に記載の装置。
【請求項9】
前記1つまたは複数の処理部品のうちの1つまたは複数は、1つまたは複数の補足的な航行部品から前記個体の位置の修正情報を受信する請求項1に記載の装置。
【請求項10】
前記1つまたは複数の処理部品のうちの1つまたは複数は、前記1つまたは複数の補足的な航行部品の初期化で、前記個体の初期の位置情報を1つまたは複数の補足的な航行部品に提供する請求項1に記載の装置。
【請求項11】
前記1つまたは複数のセンサは前記個体によって装着可能なスーツの中に組み込まれ、前記1つまたは複数のセンサは前記個体の1つまたは複数の関節に隣接する位置で前記スーツに配置される請求項1に記載の装置。
【請求項12】
前記1つまたは複数の処理部品のうちの1つまたは複数に方位情報を提供する磁気首方位センサであって、前記磁気首方位センサの前記方位情報は前記1つまたは複数の処理部品によって決定される前記位置変化を補足する磁気首方位センサをさらに含み、
前記磁気首方位センサは前記個体の前記位置変化の方位を決定するために地球の磁界を使用する請求項1に記載の装置。
【請求項13】
前記1つまたは複数の処理部品のうちの1つまたは複数に高度情報を提供する気圧高度センサであって、前記気圧高度センサの前記高度情報は前記1つまたは複数の処理部品によって決定される前記位置変化を補足する気圧高度センサをさらに含み、
前記気圧高度センサは前記個体の前記位置変化の高度変化を決定するために大気圧を測定する請求項1に記載の装置。
【請求項14】
前記個体に既知の経路を通らせて前記個体の前記1つまたは複数の関節移動が前記既知の経路に対しどのように反応するかを監視することによって、前記1つまたは複数のセンサおよび前記1つまたは複数の処理部品は前記個体に対して調整される請求項1に記載の装置。
【請求項15】
前記1つまたは複数の処理部品は、前記個体の既知の開始場所および前記位置変化に基づいて前記個体の更新された位置を計算し、
前記1つまたは複数の処理部品は、前記個体の前記更新された位置を表示部品および記録部品の1つまたは複数に送信する請求項1に記載の装置。
【請求項16】
前記1つまたは複数のセンサは1つまたは複数の速度センサを含む請求項1に記載の装置。
【請求項17】
1つまたは複数の補足的な航行部品をさらに含み、前記1つまたは複数の補足的な航行部品のうちの1つまたは複数は、前記個体が履く靴の中に組み込まれ、
前記1つまたは複数の補足的な航行部品のうちの1つまたは複数は、前記個体が履く靴が実質的に静止しているときに1つまたは複数の速度ゼロの更新を始める請求項1に記載の装置。
【請求項18】
個体の1つまたは複数の関節の1つまたは複数の移動を測定する工程と、
前記1つまたは複数の移動を前記個体の位置変化に変換する工程とを含む方法。
【請求項19】
前記個体の前記1つまたは複数の関節の前記1つまたは複数の移動を測定する工程が、
歪みセンサ上に引き起こされた前記歪みセンサ上の歪みを前記歪みセンサに隣接する前記関節の移動によって測定する工程を含む請求項18に記載の方法。
【請求項20】
前記1つまたは複数の移動を前記個体の前記位置変化に変換する工程が、
前記個体の前記位置変化の変位および方位を決定するために、前記歪みセンサ上に引き起こされた前記歪みの特徴を分析する工程を含む請求項19に記載の方法。
【請求項21】
前記個体の更新された位置を決定するために、前記個体の前記位置変化を前記個体の既知の開始場所に追加する工程をさらに含む請求項18に記載の方法。
【請求項22】
1つまたは複数のコンピュータ可読の信号保持媒体と、
前記信号保持媒体に格納され、個体の1つまたは複数の関節の1つまたは複数の移動を測定するための手段と、
前記信号保持媒体に格納され、前記1つまたは複数の移動を前記個体の位置変化に変換する手段とを含む物品。
【請求項1】
個体の1つまたは複数の関節移動に基づいて1つまたは複数の信号を生成する1つまたは複数のセンサと、
前記個体の位置変化を決定するために前記1つまたは複数の信号のうちの1つまたは複数を使用する1つまたは複数の処理部品とを含む装置。
【請求項2】
前記1つまたは複数のセンサは1つまたは複数の歪みセンサを含む請求項1に記載の装置。
【請求項3】
前記1つまたは複数の歪みセンサは前記個体の関節に隣接する歪みセンサを含み、前記歪みセンサは前記1つまたは複数の関節移動のうちの関節の関節移動に応じて歪みを感知し、
前記歪みセンサは前記1つまたは複数の信号のうちの信号中で歪み情報として前記歪みを表し、
前記1つまたは複数の処理部品のうちの1つまたは複数は、前記歪み情報を前記個体の前記位置変化に変換する請求項2に記載の装置。
【請求項4】
前記1つまたは複数の歪みセンサのうちの歪みセンサは、前記個体の関節の屈曲を検知し、前記歪みセンサは前記1つまたは複数の信号のうちの信号中で歪み情報として前記屈曲を表し、
前記1つまたは複数の処理部品のうちの1つまたは複数は、前記個体の前記位置変化の変位を決定するために前記歪み情報を使用する請求項2に記載の装置。
【請求項5】
前記1つまたは複数の歪みセンサのうちの歪みセンサは、前記個体の関節の捻じれを検知し、前記歪みセンサは前記1つまたは複数の信号のうちの信号中で歪み情報として前記捻じれを表し、
前記1つまたは複数の処理部品のうちの1つまたは複数は、前記個体の前記位置変化の方位を決定するために前記歪み情報を使用する請求項2に記載の装置。
【請求項6】
前記1つまたは複数の歪みセンサのうちの第1歪みセンサは、前記個体の第1の関節の屈曲を検知し、前記第1歪みセンサは前記1つまたは複数の信号のうちの第1信号中で第1歪み情報として前記屈曲を表し、
前記1つまたは複数の処理部品のうちの1つまたは複数は、前記個体の前記位置変化の変位を決定するために前記第1歪み情報を使用し、
前記1つまたは複数の歪みセンサのうちの第2歪みセンサは、前記個体の第2の関節の捻じれを検知し、前記2歪みセンサは前記1つまたは複数の信号のうちの第2信号中で第2歪み情報として前記捻じれを表し、
前記1つまたは複数の処理部品のうちの1つまたは複数は、前記個体の前記位置変化の方位を決定するために前記第2歪み情報を用い、
前記1つまたは複数の処理部品のうちの1つまたは複数は、前記個体の更新された位置を決定するために前記個体の前記位置変化の変位、前記位置変化の方位および既知の開始場所を使用する請求項2に記載の装置。
【請求項7】
前記個体の前記1つまたは複数の関節移動に基づく前記1つまたは複数の処理部品によって決定される前記位置変化と、
1つまたは複数の補足的な航行部品からの位置情報と
を比較考量し、組み合わせるフィルタ部品をさらに含む請求項1に記載の装置。
【請求項8】
前記補足的な航行部品は汎地球測位システム(「GPS」)および慣性航法システム(「INS」)の1つまたは複数を含み、
前記フィルタ部品は、前記1つまたは複数の処理部品および前記補足的な航行部品の相対的な信頼度に基づいて前記1つまたは複数の処理部品および前記補足的な航行部品からの位置情報を比較考量し、組み合わせる請求項7に記載の装置。
【請求項9】
前記1つまたは複数の処理部品のうちの1つまたは複数は、1つまたは複数の補足的な航行部品から前記個体の位置の修正情報を受信する請求項1に記載の装置。
【請求項10】
前記1つまたは複数の処理部品のうちの1つまたは複数は、前記1つまたは複数の補足的な航行部品の初期化で、前記個体の初期の位置情報を1つまたは複数の補足的な航行部品に提供する請求項1に記載の装置。
【請求項11】
前記1つまたは複数のセンサは前記個体によって装着可能なスーツの中に組み込まれ、前記1つまたは複数のセンサは前記個体の1つまたは複数の関節に隣接する位置で前記スーツに配置される請求項1に記載の装置。
【請求項12】
前記1つまたは複数の処理部品のうちの1つまたは複数に方位情報を提供する磁気首方位センサであって、前記磁気首方位センサの前記方位情報は前記1つまたは複数の処理部品によって決定される前記位置変化を補足する磁気首方位センサをさらに含み、
前記磁気首方位センサは前記個体の前記位置変化の方位を決定するために地球の磁界を使用する請求項1に記載の装置。
【請求項13】
前記1つまたは複数の処理部品のうちの1つまたは複数に高度情報を提供する気圧高度センサであって、前記気圧高度センサの前記高度情報は前記1つまたは複数の処理部品によって決定される前記位置変化を補足する気圧高度センサをさらに含み、
前記気圧高度センサは前記個体の前記位置変化の高度変化を決定するために大気圧を測定する請求項1に記載の装置。
【請求項14】
前記個体に既知の経路を通らせて前記個体の前記1つまたは複数の関節移動が前記既知の経路に対しどのように反応するかを監視することによって、前記1つまたは複数のセンサおよび前記1つまたは複数の処理部品は前記個体に対して調整される請求項1に記載の装置。
【請求項15】
前記1つまたは複数の処理部品は、前記個体の既知の開始場所および前記位置変化に基づいて前記個体の更新された位置を計算し、
前記1つまたは複数の処理部品は、前記個体の前記更新された位置を表示部品および記録部品の1つまたは複数に送信する請求項1に記載の装置。
【請求項16】
前記1つまたは複数のセンサは1つまたは複数の速度センサを含む請求項1に記載の装置。
【請求項17】
1つまたは複数の補足的な航行部品をさらに含み、前記1つまたは複数の補足的な航行部品のうちの1つまたは複数は、前記個体が履く靴の中に組み込まれ、
前記1つまたは複数の補足的な航行部品のうちの1つまたは複数は、前記個体が履く靴が実質的に静止しているときに1つまたは複数の速度ゼロの更新を始める請求項1に記載の装置。
【請求項18】
個体の1つまたは複数の関節の1つまたは複数の移動を測定する工程と、
前記1つまたは複数の移動を前記個体の位置変化に変換する工程とを含む方法。
【請求項19】
前記個体の前記1つまたは複数の関節の前記1つまたは複数の移動を測定する工程が、
歪みセンサ上に引き起こされた前記歪みセンサ上の歪みを前記歪みセンサに隣接する前記関節の移動によって測定する工程を含む請求項18に記載の方法。
【請求項20】
前記1つまたは複数の移動を前記個体の前記位置変化に変換する工程が、
前記個体の前記位置変化の変位および方位を決定するために、前記歪みセンサ上に引き起こされた前記歪みの特徴を分析する工程を含む請求項19に記載の方法。
【請求項21】
前記個体の更新された位置を決定するために、前記個体の前記位置変化を前記個体の既知の開始場所に追加する工程をさらに含む請求項18に記載の方法。
【請求項22】
1つまたは複数のコンピュータ可読の信号保持媒体と、
前記信号保持媒体に格納され、個体の1つまたは複数の関節の1つまたは複数の移動を測定するための手段と、
前記信号保持媒体に格納され、前記1つまたは複数の移動を前記個体の位置変化に変換する手段とを含む物品。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2007−508541(P2007−508541A)
【公表日】平成19年4月5日(2007.4.5)
【国際特許分類】
【出願番号】特願2006−532260(P2006−532260)
【出願日】平成16年1月20日(2004.1.20)
【国際出願番号】PCT/US2004/001350
【国際公開番号】WO2005/045462
【国際公開日】平成17年5月19日(2005.5.19)
【出願人】(503010896)ノースロップ グラマン コーポレーション (7)
【Fターム(参考)】
【公表日】平成19年4月5日(2007.4.5)
【国際特許分類】
【出願日】平成16年1月20日(2004.1.20)
【国際出願番号】PCT/US2004/001350
【国際公開番号】WO2005/045462
【国際公開日】平成17年5月19日(2005.5.19)
【出願人】(503010896)ノースロップ グラマン コーポレーション (7)
【Fターム(参考)】
[ Back to top ]