
個別に駆動される高速混合軸を持つ改良された前段調整機
【課題】タンパク質およびデンプンを含む食物または飼料の混合物を処理する方法を提供する。
【解決手段】混合物を処理容器12内に入れて通過させる手順を含み、容器は、一対の細長い、軸方向に回転可能な軸14,16を備える。それぞれの軸は、外側に伸びる複数の混合部材を持ち、両軸の混合部材50,52が軸方向にずれかつ間に入り込んでいて、混合物が容器を通過する間、軸を回転する。混合物の処理手順は、軸の間の回転の速度差が3:1から18:1の範囲で、それぞれ異なる速度で軸を回転し、食物または飼料の混合物を容器内で約100〜212度Fの温度に加熱し、デンプンの糊化の進み具合で測定して少なくとも約50%の蒸解を達成することを含む。
【解決手段】混合物を処理容器12内に入れて通過させる手順を含み、容器は、一対の細長い、軸方向に回転可能な軸14,16を備える。それぞれの軸は、外側に伸びる複数の混合部材を持ち、両軸の混合部材50,52が軸方向にずれかつ間に入り込んでいて、混合物が容器を通過する間、軸を回転する。混合物の処理手順は、軸の間の回転の速度差が3:1から18:1の範囲で、それぞれ異なる速度で軸を回転し、食物または飼料の混合物を容器内で約100〜212度Fの温度に加熱し、デンプンの糊化の進み具合で測定して少なくとも約50%の蒸解を達成することを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本出願は2006年10月23日出願の出願S/N 11/551997の部分継続出願であり、本願に引用して本明細書とする。
【0002】
本発明は改良された、二重混合軸式前段調整機に広く関係し、これは動物飼料または人用食物の生産用の押出機または押出造粒機のような処理装置の上流で用いられるタイプのものである。より具体的には、本発明は、前段調整機が混合軸と適切に連結した可変駆動メカニズムを含み両軸が互いに独立して個々の回転速度で選択的に回転できるように設計されているような前段調整機およびこれを使用する処理システムに関係している。
【背景技術】
【0003】
前段調整機は押出機と組合せて広く用いられ、押出機による一層の加工および蒸解に先立ち食物材料を調合およびブレンドする。例えば、比較的高い割合で粉末状材料を含む製品は押出作業に先立って調整機内でしばしば水と混合され蒸気で処理される。前段調整機を用いることは多量のタンパク質およびデンプンを含むペットフードまたは類似製品を調合する上でとりわけ有利である。今日の市場には無数のペットフードの配合があり、その成分および量は様々に変化する。例えば、低カロリーペットフードは人気があり非常に多量のデンプン含有材料(例えば、トウモロコシおよび米)を含む。このような低カロリーペットフードは前段調整機内で長い滞留時間に曝すことができないが、それはそのデンプン成分がネバネバになりがちで下流の押出処理に適さなくなるためである。一方で、標準的なペットフードはデンプンがずっと少なくかつタンパク質が高い含有量でほどよく前段調整されるためには長い滞留時間を要す。したがって、滞留時間の観点から制限付きの可変しかできない前段調整機は最新式のペットフード加工機としては不適切な場合がしばしばある。
【0004】
近年、魚の養殖に用いられる押出加工による水産飼料の生産が増加してきている。このような水産飼料には昔から多量の魚粉が含まれてきた(重量で約70%まで)。しかしながら、価格およびこのような粉の調達性のせいで、このように多量の魚粉の使用を避ける傾向がある。これに代るものとして、加工業者は大豆のような高タンパク植物成分をより多量に使用している。これら植物タンパク源の問題はほとんどのものが相当量の抗栄養因子を持っているということで、それらを処理中に破壊しなくてはならない。これには一定時間の湿熱の活用を必要とし、一般には前段調整機内でおこなわれる。在来の前段調整機の多くはこのような抗栄養因子を完全に破壊することはできず、このことが今日の水産飼料との関連においてこれらの有用性を損なっている。
【0005】
在来型の前段調整機はしばしば細長い容器を含み、これは横並びの、円筒錐台で、連通している全く同じ一対の混合チャンバーを持ち、それぞれ同じ横断面積を呈している。それぞれのチャンバーにはチャンバーの縦軸に合わせた回転可能な駆動軸に放射状に取り付けられた混合棒またはビーターを備え、ビーターは材料が円筒錐台の壁周りを押し流されるにつれ製品を容器の入口端からその出口端に向けて縦方向に進ませるように形作られている。さらに、それぞれのチャンバーのビーターは材料がチャンバー間の共通部分に近づくと製品を一方のチャンバーから他方に二者択一的に送るように形作られている。
【0006】
多くの場合、食物が混合チャンバー内を進行中にこれに水を加えるために一連の注水口が前段調整容器の長さの少なくとも一部に沿って設けられる。当然ながら、塊の形成を防ぐために前段調整容器内に導入された水が粉のような密度を持つ材料と完全かつ均一にブレンドされることは極めて重要である。一般に、塊は材料と水の不均質な混合を意味し塊の外表面の水分割合が最も高い。
【発明の概要】
【発明が解決しようとする課題】
【0007】
粉のような密度を持つ材料と水を適切にブレンドするためには調整容器内の十分な滞留時間とともに材料と水との適切な混合またはかき混ぜの両方を必要とする。であるから、容器内のかき混ぜを増そうとして在来型の前段調整機のビーターの回転速度を上げることは材料が容器内をより大きな速度で通過させることになり、これは同時に材料の容器内の滞留時間を許容できない値にまで減少させるものかもしれない。一方で容器内の滞留時間を増すためにビーターの回転速度を減少させることは容器の混合特性に不利に作用し材料と水の適切なブレンドが達成できなくなるかもしれない。全体の長さを増すことは混合軸に伴う機械的な問題のため望ましくない。
【0008】
さらに、在来型の前段調整装置の構造的な性質は、例えば一つの装置を異なる材料で様々な流量で処理するために用いたいというような操作の柔軟性を望む場合には適さない。すなわち、容器内の材料の滞留時間を延ばす試みとして組み立て式容器部分で暫定的に装置の長さを増すことは満足な対策ではなく、それは装置の固有の重量および構造的な特性のためと同時に、多くの場合材料を1つの処理段階から次に送るために予め決められた材料の入口および出口が特定の場所に位置するためである。というわけで、前段調整装置を通過する材料の滞留時間を変化させる手段を提供し、これが異なるタイプの材料を随意的に変化する流量で処理できるようにすることが望ましい。
【0009】
米国特許第4752139(ここに本出願に引用して本明細書とする)には異なる寸法の弓形の混合チャンバーを持ち、それぞれのチャンバーの中心線に沿った混合軸がある一連の前段調整機を記載している。混合軸には放射状に延び、間に入り込んだ混合部材が含まれる。‘139特許による前段調整機において両軸は1台の駆動モーターを介して駆動され、適切な歯車装置により混合軸間に一定の速度差(通常2:1)を維持している。これらの前段調整機はカンザス州サベッサの Wenger 製作所から市販され、運転費用の追加を伴わずにシステムの処理量を増加させることで技術的に顕著な改良であることを証明した。しかしながら、‘139特許による前段調整機の固定した速度差による設計は操作パラメータの幅が制限されるため他の場合では好ましくても、時には操作上の欠点となる。
【課題を解決するための手段】
【0010】
本発明は上に概説した問題を解決し独立した軸の回転速度を可能にする2軸前段調整機を提供する。大まかに、本発明による前段調整機は材料の入口および出口を持つ細長い混合容器を含み、両軸のそれぞれに複数の混合部材が付き、容器内で横方向に間を開けた関係で位置する一対の細長い混合軸を伴っている。一対の可変駆動メカニズムがそれぞれの軸に連結することにより両軸が互いに独立して個々の回転速度で選択的に回転できるようにしている。このような軸の回転は駆動メカニズムと適切に連動している制御装置により制御され両軸の回転速度を独立して制御する。
【0011】
好適な形態では、前段調整機混合容器は弓形で、並置され、連通する異なる断面積の一対のチャンバーを含み、それぞれは実質的にその中心線に沿った混合軸を装備する。さらに前段調整機は秤量装置の上に支えられ、前段調整機を使用中にその内容物を計量できることが好ましく、このことにより速やかに材料の前段調整機内の滞留時間を変える手段を持つことになる。秤量装置は通常は複数のロードセルの形で前段調整機の制御装置と適切に連動している。
【0012】
別の形態では、前段調整機は並置された同じ断面積の連通するチャンバーを持ち、それぞれがその中心線に沿う混合軸を装備するタイプの場合もある。このタイプの前段調整機もまた滞留時間の簡単な変更を促進するために秤量装置を備えている場合もある。
【図面の簡単な説明】
【0013】
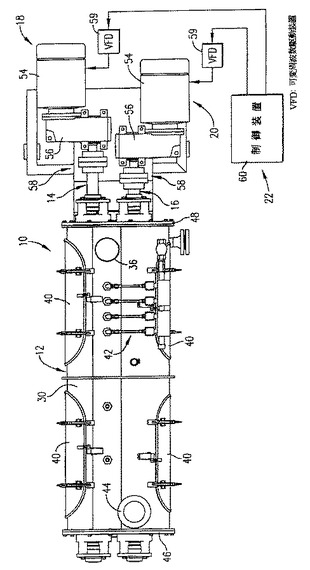
【図1】本発明による前段調整機の幾分略図的な平面図である。
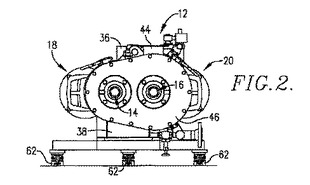
【図2】図1の前段調整機の正面図である。
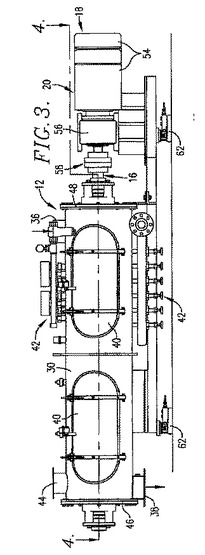
【図3】図1の前段調整機の側面図である。
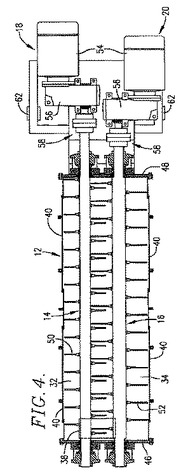
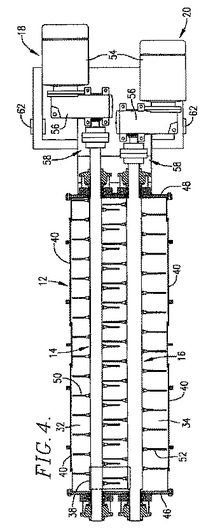
【図4】図3の線分4−4に沿ってとった断面図である。
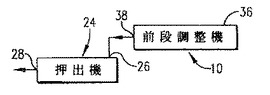
【図5】本発明による前段調整機および押出機の間の相互連結の概念図である。
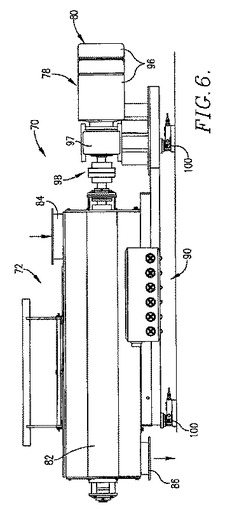
【図6】本発明に基づく別のタイプの前段調整機の側面図である。
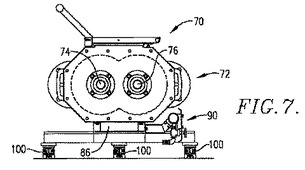
【図7】これの端面図である。
【図8】これの平面図である。
【図9】本発明に基づく別のタイプの前段調整機の実施態様の透視図である。
【図10】図9で描いた前段調整機の側面図である。
【図11】図10の線分11−11に沿ってとった断面図である。
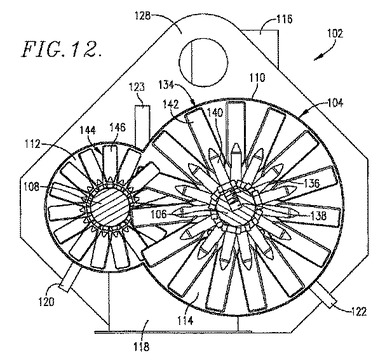
【図12】図10の線分12−12に沿ってとった断面図である。
【発明を実施するための形態】
【0014】
<図1〜5の実施態様>
次に図面に目を向けると、改良された前段調整機10は図1〜4に描かれている。おおまかに、前段調整機10は細長い混合容器12を含み、内部にその奥行きに沿って伸びる平行で、細長く、軸方向に伸びる一対の混合軸14および16を伴う。軸14、16はそれぞれの可変駆動部18および20と適切に連結していて、後者は同様にデジタル制御装置22に接続している。前段調整機10は下流の押出機または押出造粒機のような処理装置と共に使用するように造られている。図5に描かれているように前段調整機10は押出機24(これは単軸または2軸の機種でもよい)と連結し、これには入口26および絞ったオリフィス金型出口28、のみならず内部の、軸方向に回転可能なスクリューを持つ。
【0015】
より具体的には、容器12は細長い横断的に弓形の側壁30を持ち、これが細長く、並列して、連通している一対のチャンバー32および34、のみならず材料入口36および材料出口38を呈する。チャンバー34は図4を見ればすぐ判るように、隣接するチャンバー32よりも大きな断面積を持つ。側壁30には点検口40がありさらに前段調整機を使用中に容器12の内部へ水および/または蒸気を注入するための注入組部品42、および蒸気排出口44を装備している。容器12の反対側端末には図示の通り、端板46および48がある。
【0016】
それぞれの軸14、16には複数の放射状に外側に伸びた混合部材50および52があり、これらは前段調整機に供給された材料をかき混ぜおよび混合し、さらには材料を入口36から出口38の方向へ移送し排出するように設計されている。部材50は軸方向に部材52に対して相対的にずれていて、さらに部材50、52は間に入り込んでいることが見てとれる(すなわち、部材52は軸14および部材50が作りだす円筒状の運用包囲線図内に達し、逆も同様である)。部材50、52は軸14、16に実質的に直角に図解されているが、発明はそのようには限定されず;むしろ、部材50、52は使用者の裁量により長さおよびピッチの両方で調節できる。再度図4に言及すると、軸14は実質的にチャンバー32の中心線に沿って位置し、および軸16も同様に実質的にチャンバー34の中心線に沿って位置することが判る。
【0017】
駆動部18および20は図示した実施態様においては装置的に同一で、それぞれが駆動モーター54、歯車減速機56、および対応する歯車減速機56およびモーター54を軸14または16に相互連結する継手組部品58を含む。駆動部18および20はさらに可変周波数駆動装置59があることが好ましく、これらは速度および/または回転方向に関して軸14、16の個別の回転を選択的に、互いに独立して、可能にするように設計されている。駆動部18および20に適切な制御を与えるために、駆動装置57はそれぞれ対応するモーター54および制御装置60と一体となっている。制御装置60はコントローラ、プロセッサ、特定用途向け集積回路(ASIC)でも、または論理演算命令を実行できる他の全てのタイプのデジタルまたはアナログ機器であってもよい。機器はDell、Compaq、Gateway、または他の全てのコンピュータ製造業者で製造および販売されるパソコンまたはサーバーコンピュータであっても、WindowsTMNT、Novelネットウェア、UnixTM、または他の全てのネットワーク基本ソフトで動作するネットワークコンピュータであってすらもかまわない。駆動装置57は本発明の目的を達成するために望み通りにプログラムすることが、例えば異なる回転速度範囲、回転方向および定格電力に構成することができる。
【0018】
好適な形態では、前段調整機10は複数のロードセル62の形の秤量装置の上に支えられ、これはさらに制御装置60と適切に連動している。ロードセル62の使用により、容器12を通過する材料の滞留時間を速やかに、絶えず変動させることが可能になり、このことは米国特許第6465029に詳細に記載してあり、ここに本出願に引用して本明細書とする。
【0019】
好適な可変周波数駆動メカニズム18、20および制御装置60を使用することにより軸14、16の回転速度を高速で調整することにより望みの前段調整を達成することを可能にしながら、同時に互いにかみ合う混合部材50、52の間のあらゆる衝突を防止している。一般に、制御装置60および連動する駆動装置57はそれぞれの駆動モーター54と交信することで軸速度を制御している。さらに、軸14、16は運転者の裁量により異なる回転方向または同じ回転方向で回転させることができる。
【0020】
前段調整機10を通過する材料の滞留時間は、軸速度および/または方向を調整することにより手動でも制御できるが、むしろ、制御装置60による自動が好ましい。ロードセル62による重量情報は制御装置60に指示され、次いでこれは望む滞留時間に基づき軸速度および/または方向を変更する。
【0021】
前段調整機10は一般に動物飼料または人用食物の材料である穀類(例えば、小麦、トウモロコシ、オート麦、大豆)、肉および肉の副産物および多くの添加物(例えば、界面活性剤、ビタミン類、ミネラル類、着色剤)のようなものを処理するのに用いられる。デンプン含有穀類を処理する場合は、これらは前段調整機を通過する間に通常は少なくとも部分的に糊化される。前段調整機10は通常は約100〜212度Fの温度、約30秒〜5分の滞留時間、および大気圧またはわずかに高い圧力で運転される。
【0022】
前段調整機10用の駆動装置は軸14、16を約1000rpmまでの可変速度で回転することができるが、約200〜900rpmがより好ましい。さらに、この前段調整機の設計に固有である運転の柔軟な操作性により形状が類似した在来型の前段調整機に比べより高いレベルの蒸解(すなわち、デンプンの糊化)を可能にしている。
【0023】
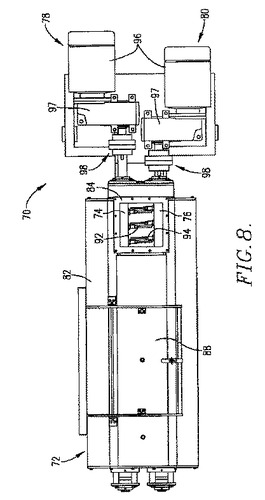
<図6〜8による実施態様>
この実施態様は多くの点で上に記載したそれに類似し、細長い混合容器72を持ちその内部に長さに沿って伸びる平行な、細長い、軸方向に伸びる一対の軸74、76を伴う前段調整機70を提供する。軸74、76はそれぞれの可変駆動部78、80と適切に連動していて、後者は先に記載した制御装置22に類似したデジタル制御装置(表示なし)に順次接続している。前段調整機70は押出機や押出造粒機のような下流の処理装置と共に用いる場合もある。
【0024】
容器72には細長い、横断的に弓形の側壁82があり、これは細長く、並列して、連通している一対の同じ断面積のチャンバーのみならず、材料入口84および材料出口86を呈する。側壁82には点検口88があり、さらに前段調整機を使用中に水および/または蒸気を容器82内に注入するための注入組部品90を備えている。
【0025】
第1の実施態様と同様に、それぞれの軸74、76には複数の外側に伸びる混合部材92、94が表面に設けられ通常はそれぞれの軸の全長にわたる。部材92、94は図8に図解したように軸方向にずれかつ間に入り込み、さらに前段調整機に供給された材料をかき混ぜかつ混合しさらに材料を入口84から出口86の方向へ移送し排出するように設計されている。
【0026】
駆動部78、80は全く同じでそれぞれ駆動モーター96、歯車減速機97および継手98を持つ。駆動部は可変周波数駆動装置で、軸74、76を互いに独立して選択的に個別の回転ができるように設計されていることが好ましい。
前段調整機70は複数のロードセル100から構成される秤量装置の上に支えられ、これらは前段調整機の制御装置と適切に連動している。全て米国特許第6465029に記載されているとおりロードセルは滞留時間の変動を可能にしている。
前段調整機72は図1〜5の実施態様に関連して記載したものと同じ流儀でかつ同じ一般的な操作パラメータで用いることができる。
【0027】
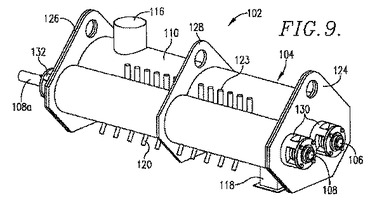
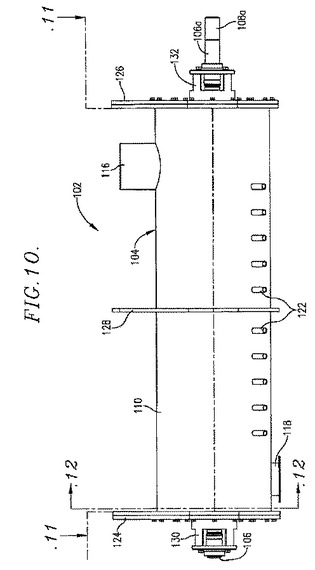
<図9〜12による実施態様>
前段調整機102は細長い2段混合容器104を含み、その長さに沿って平行で細長く、軸方向に伸びかつ回転可能な一対の混合軸106および108を伴っている。軸106および108は前に記載した実施態様の場合と同様に個別の可変駆動装置(表示なし)と連結している。これらの可変駆動装置は順次デジタル制御装置に接続しているが、これも表示していない。前段調整機102も同様に下流の押出機または押出造粒機と接続するように適合している。
【0028】
容器104は細長い横断的に弓形の側壁110を持ち、これは細長く、並列して、連通している一対のチャンバー112および114のみならず材料入口116および材料出口118を呈する。チャンバー114は隣接するチャンバー112より大きな断面積を持ち、このことはこれから記載する理由により重要なことである。それぞれのチャンバー112、114には対応するチャンバーの長さに沿って間隔を開けた一連の入口120、122が装備され、チャンバー112、114の接合部に中間の一連の入口123が位置している。これらの口120、122はチャンバー内部に達する水および/または蒸気注入器が接続できるように適合している。容器104の全体にはさらに前部および後部の端板124および126だけでなく中央板128もある。
【0029】
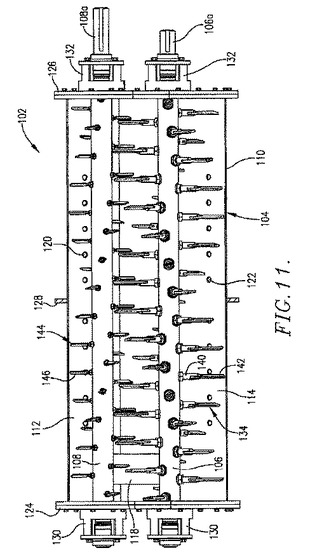
図解したように、軸106、108は対応するチャンバー112、114内で実質的に中央に位置している。こうするために、板124に設けた前方ベアリング130が軸106、108の前方端を支え、同様に板126に固定した後方ベアリング132が軸の後方端を支える。軸106、108には後方に伸びる延長部106a、108aがベアリング132から突きだし、先に記載した可変周波数駆動装置との接合部を提供する。
【0030】
軸106には軸の長さに沿って千鳥状に位置する複数の放射状に外側に伸びる混合部材134が装備されている。それぞれの部材134(図12)は軸106の対応するネジを切った穴に納まるネジを切った内挿部分136とともに、比較的平らなパドル状部142がある外側に突き出した部分140を含む。図11で最も判りやすいように、混合部材134のパドル部142は材料が入口116から出口118に進む方向とは相対的に逆の方向に向けられている。つまり、これらの部品は前段調整機102を通過する材料の流れを妨げるように作用する。
【0031】
小さい方のチャンバー112に位置する軸108も同様にその長さに沿って交互に千鳥状の関係にある一連の混合部材144を持つ。部材144の形が幾分小さいことを除いて、部材144は部材134と全く同一である。それぞれの部材144は船外パドル状部146を呈する。ここでは、部分146の向きは部分142のそれとは逆で、すなわちそれらは材料を入口116から出口118の方向へより積極的に進めるように前方向に向いている。
【0032】
先に記載した実施態様の場合と同様に、隣接する一対の混合部材134および144は互いに軸方向にずれ、かつ間に入り込んでいる;そのため部材は自己掃除式の設計にはなっていない。これにより両軸は非常に異なる回転速度で回転しながら、同時に部材134および144の間の機械的干渉による閉鎖の可能性を防ぐことができる。
【0033】
本発明による前段調整機の設計により今まで可能だったものより高い程度まで材料を処理することが可能になった。例えば、米国特許第4752139に記載された型の以前の前段調整機ではその両軸間の相対回転速度の変更を現地調節により達成することはできなかった。すなわち、このような以前の前段調整機では、装置の製作中にひとたび回転速度差を確定すると、装置の全面的な再構築をしなくてはそれを後から変更することはできなかった。この種の通常の前段調整機ではそれぞれ小および大のチャンバー内の軸の間に2:1の速度差があった。しかしながら本発明においては、ずっと大きなかつ無限に調整可能な速度差が直ちに達成できる。かくして好適な形態においては、軸106、108の間の速度差は少なくとも5:1で、一般には3:1から18:1である。後者の差は軸108の回転速度が900rpm、および軸106が50rpmに相当する。
【0034】
この機能強化された設計は幾つかの処理上の優位さを与える。一例を挙げれば、‘139特許による在来の前段調整機の設計では、達成可能な最高蒸解度は通常約30%で、最高でも約43%であった(デンプン成分の糊化により測定したもので Mason他の「蒸解度を決定する新手法、米国穀類化学者協会、第67回年会、1982年10月26日」に記載された方法によるが、本願に引用して本明細書とする)。しかしながら本発明においては、著しくより高い蒸解割合、少なくとも50%、より好ましくは少なくとも55%、および最も好ましくは少なくとも約75%を達成することができる。と同時に、これら促進された蒸解値は在来の前段調整機と比べて同じかより短い滞留時間でさえ得られている;具体的には、このような在来の設計では最高の蒸解値を得るために約160〜185秒の滞留時間を要したのに対し、今回の前段調整機においては滞留時間はずっと少なく、この同じ蒸解を達成するのに120〜150秒台である。さらに、通常のより長い前段調整機の滞留時間を用いた場合、蒸解値の程度は通常著しく増加する。
【0035】
本発明による一つの形態において、それぞれの量のタンパク質およびデンプン(および通常は脂肪および砂糖のような他の材料)を含む人用食物または動物用飼料混合物を本発明による前段調整機で処理することにより、少なくとも約50%、より好ましくは少なくとも約75%のデンプン糊化に基づく蒸解値を達成した。このような混合物の代表例はペットおよび魚用飼料である。さらに本発明による前段調整機はより高い比機械エネルギー(SME)値を与える。在来の前段調整機は一般に比較的低いSMEを示すが、これに対しこの前段調整機は増大したSMEを与え、処理済みの開始材料当たり約1.7〜5.0、より好ましくは約1.9〜4.5kW−Hr/トンである。
【0036】
技術的によく知られているように前段調整機内で蒸解度を上げることは下流の処理の間に少ないエネルギーと滞留時間しか必要とせずにペットフードのような完全な蒸解を要求する製品を達成できるという点で有利である。かくして、本発明に基づく前段調整機を用いることにより製品の出来高を増し、かくして実質的に処理コストを低減する。
【0037】
<実施例1>
この実施例においては、標準的なドッグフード調合物を準備し本発明に基づく前段調整機を用いて前段調整した。調合物は53.0%のトウモロコシ、22.0%の家禽粉、15%の大豆粉、および10%のトウモロコシグルテン粉を含む(全ての割合は重量による)。この調合物を前段調整機入口に供給し蒸気および水の注入と共に内部で処理を受けさせた。小チャンバーの軸は900rpmの速度で逆方向に回転し、一方大チャンバーの軸は50rpmの速度で前方方向に回転した。3種類の個別の試験を前段調整機への異なる供給量で行い、これらの試験結果を下の表1に示す。表1に記録されている通り、前段調整機を用いて得られた蒸解割合の値は47.6〜50.9%の範囲で、さらに合計SME値は1.97〜3.49kW−Hr/トンまで変動した。
【0038】
【表1】

*1 F は前方の方向を指し、R は後方の方向を指す。方向性は軸の混合パドルの方向付けおよび/または反対方向に回転する軸により達成される。本実施例においては、両軸は同一方向に回転され、F方向では混合物を前方へ動かすように方向付けされ、一方R方向では混合物の前向きの動きを妨げるように方向付けされている。
【0039】
<実施例2>
この実施例においては、標準的なキャットフード調合物を準備し実施例1に説明したように前段調整した。キャットフード調合物は32%の家禽粉、28%のトウモロコシ、14%の米、13%のトウモロコシグルテン粉、3%のビートパルプ、2%のリン酸(54% H3PO4)、および8%の家禽脂肪を含む(全ての割合は重量による)。3種類の個別の試験の運転において、小チャンバーの軸は800rpmの速度で逆方向に回転し、一方大チャンバーの軸は50rpmの速度で前方方向に回転した。これらの試験結果を下の表2に示すが、ここでは蒸解割合は45.8〜48.1%まで変動し、さらに合計SME値は2.9〜3.9 kW−Hr/トンの範囲であった。
【0040】
【表2】
【0041】
<実施例3>
この実施例においては、ナマズの餌の製造に用いられる浮遊性水産飼料調合物を準備し実施例1に説明したように前段調整した。浮遊性水産飼料調合物は20%の全粒トウモロコシ、20%の魚粉、20%の脱脂米糠、15%の小麦製粉くず、10%の大豆粉、10%のビートパルプ、および5%の小麦を含む(全ての割合は重量による)。3種類の個別の試験の運転で、小径軸は800rpmの速度で逆方向に回転し、大径軸は50rpmの速度で前方方向に回転した。これらの試験結果を表3に示すがここでは蒸解は78.7〜84.5%まで変動し、さらに合計SME値は3.7 kW−Hr/トンであったことがわかる。
【0042】
【表3】
【0043】
<実施例4>
この実施例においては、鱸/鯛の餌の製造に用いられる沈降性水産飼料調合物を準備し実施例1に説明したように前段調整した。沈降性水産飼料調合物は53%の大豆粉、15%の小麦、8.5%のトウモロコシグルテン飼料、6.0%のトウモロコシ、1%のヒマワリ粉、および16%の魚油を含む。3種類の個別の試験で、小チャンバー軸は800rpmの速度で逆方向に回転し、大径軸は50rpmの速度で前方方向に回転した。これらの試験結果を表4に示すが、ここでは蒸解は72.5〜75.8%までの範囲で、さらに合計SME値は2.2〜3.2 kW−Hr/トンであったことがわかる。
【0044】
【表4】
【技術分野】
【0001】
本出願は2006年10月23日出願の出願S/N 11/551997の部分継続出願であり、本願に引用して本明細書とする。
【0002】
本発明は改良された、二重混合軸式前段調整機に広く関係し、これは動物飼料または人用食物の生産用の押出機または押出造粒機のような処理装置の上流で用いられるタイプのものである。より具体的には、本発明は、前段調整機が混合軸と適切に連結した可変駆動メカニズムを含み両軸が互いに独立して個々の回転速度で選択的に回転できるように設計されているような前段調整機およびこれを使用する処理システムに関係している。
【背景技術】
【0003】
前段調整機は押出機と組合せて広く用いられ、押出機による一層の加工および蒸解に先立ち食物材料を調合およびブレンドする。例えば、比較的高い割合で粉末状材料を含む製品は押出作業に先立って調整機内でしばしば水と混合され蒸気で処理される。前段調整機を用いることは多量のタンパク質およびデンプンを含むペットフードまたは類似製品を調合する上でとりわけ有利である。今日の市場には無数のペットフードの配合があり、その成分および量は様々に変化する。例えば、低カロリーペットフードは人気があり非常に多量のデンプン含有材料(例えば、トウモロコシおよび米)を含む。このような低カロリーペットフードは前段調整機内で長い滞留時間に曝すことができないが、それはそのデンプン成分がネバネバになりがちで下流の押出処理に適さなくなるためである。一方で、標準的なペットフードはデンプンがずっと少なくかつタンパク質が高い含有量でほどよく前段調整されるためには長い滞留時間を要す。したがって、滞留時間の観点から制限付きの可変しかできない前段調整機は最新式のペットフード加工機としては不適切な場合がしばしばある。
【0004】
近年、魚の養殖に用いられる押出加工による水産飼料の生産が増加してきている。このような水産飼料には昔から多量の魚粉が含まれてきた(重量で約70%まで)。しかしながら、価格およびこのような粉の調達性のせいで、このように多量の魚粉の使用を避ける傾向がある。これに代るものとして、加工業者は大豆のような高タンパク植物成分をより多量に使用している。これら植物タンパク源の問題はほとんどのものが相当量の抗栄養因子を持っているということで、それらを処理中に破壊しなくてはならない。これには一定時間の湿熱の活用を必要とし、一般には前段調整機内でおこなわれる。在来の前段調整機の多くはこのような抗栄養因子を完全に破壊することはできず、このことが今日の水産飼料との関連においてこれらの有用性を損なっている。
【0005】
在来型の前段調整機はしばしば細長い容器を含み、これは横並びの、円筒錐台で、連通している全く同じ一対の混合チャンバーを持ち、それぞれ同じ横断面積を呈している。それぞれのチャンバーにはチャンバーの縦軸に合わせた回転可能な駆動軸に放射状に取り付けられた混合棒またはビーターを備え、ビーターは材料が円筒錐台の壁周りを押し流されるにつれ製品を容器の入口端からその出口端に向けて縦方向に進ませるように形作られている。さらに、それぞれのチャンバーのビーターは材料がチャンバー間の共通部分に近づくと製品を一方のチャンバーから他方に二者択一的に送るように形作られている。
【0006】
多くの場合、食物が混合チャンバー内を進行中にこれに水を加えるために一連の注水口が前段調整容器の長さの少なくとも一部に沿って設けられる。当然ながら、塊の形成を防ぐために前段調整容器内に導入された水が粉のような密度を持つ材料と完全かつ均一にブレンドされることは極めて重要である。一般に、塊は材料と水の不均質な混合を意味し塊の外表面の水分割合が最も高い。
【発明の概要】
【発明が解決しようとする課題】
【0007】
粉のような密度を持つ材料と水を適切にブレンドするためには調整容器内の十分な滞留時間とともに材料と水との適切な混合またはかき混ぜの両方を必要とする。であるから、容器内のかき混ぜを増そうとして在来型の前段調整機のビーターの回転速度を上げることは材料が容器内をより大きな速度で通過させることになり、これは同時に材料の容器内の滞留時間を許容できない値にまで減少させるものかもしれない。一方で容器内の滞留時間を増すためにビーターの回転速度を減少させることは容器の混合特性に不利に作用し材料と水の適切なブレンドが達成できなくなるかもしれない。全体の長さを増すことは混合軸に伴う機械的な問題のため望ましくない。
【0008】
さらに、在来型の前段調整装置の構造的な性質は、例えば一つの装置を異なる材料で様々な流量で処理するために用いたいというような操作の柔軟性を望む場合には適さない。すなわち、容器内の材料の滞留時間を延ばす試みとして組み立て式容器部分で暫定的に装置の長さを増すことは満足な対策ではなく、それは装置の固有の重量および構造的な特性のためと同時に、多くの場合材料を1つの処理段階から次に送るために予め決められた材料の入口および出口が特定の場所に位置するためである。というわけで、前段調整装置を通過する材料の滞留時間を変化させる手段を提供し、これが異なるタイプの材料を随意的に変化する流量で処理できるようにすることが望ましい。
【0009】
米国特許第4752139(ここに本出願に引用して本明細書とする)には異なる寸法の弓形の混合チャンバーを持ち、それぞれのチャンバーの中心線に沿った混合軸がある一連の前段調整機を記載している。混合軸には放射状に延び、間に入り込んだ混合部材が含まれる。‘139特許による前段調整機において両軸は1台の駆動モーターを介して駆動され、適切な歯車装置により混合軸間に一定の速度差(通常2:1)を維持している。これらの前段調整機はカンザス州サベッサの Wenger 製作所から市販され、運転費用の追加を伴わずにシステムの処理量を増加させることで技術的に顕著な改良であることを証明した。しかしながら、‘139特許による前段調整機の固定した速度差による設計は操作パラメータの幅が制限されるため他の場合では好ましくても、時には操作上の欠点となる。
【課題を解決するための手段】
【0010】
本発明は上に概説した問題を解決し独立した軸の回転速度を可能にする2軸前段調整機を提供する。大まかに、本発明による前段調整機は材料の入口および出口を持つ細長い混合容器を含み、両軸のそれぞれに複数の混合部材が付き、容器内で横方向に間を開けた関係で位置する一対の細長い混合軸を伴っている。一対の可変駆動メカニズムがそれぞれの軸に連結することにより両軸が互いに独立して個々の回転速度で選択的に回転できるようにしている。このような軸の回転は駆動メカニズムと適切に連動している制御装置により制御され両軸の回転速度を独立して制御する。
【0011】
好適な形態では、前段調整機混合容器は弓形で、並置され、連通する異なる断面積の一対のチャンバーを含み、それぞれは実質的にその中心線に沿った混合軸を装備する。さらに前段調整機は秤量装置の上に支えられ、前段調整機を使用中にその内容物を計量できることが好ましく、このことにより速やかに材料の前段調整機内の滞留時間を変える手段を持つことになる。秤量装置は通常は複数のロードセルの形で前段調整機の制御装置と適切に連動している。
【0012】
別の形態では、前段調整機は並置された同じ断面積の連通するチャンバーを持ち、それぞれがその中心線に沿う混合軸を装備するタイプの場合もある。このタイプの前段調整機もまた滞留時間の簡単な変更を促進するために秤量装置を備えている場合もある。
【図面の簡単な説明】
【0013】
【図1】本発明による前段調整機の幾分略図的な平面図である。
【図2】図1の前段調整機の正面図である。
【図3】図1の前段調整機の側面図である。
【図4】図3の線分4−4に沿ってとった断面図である。
【図5】本発明による前段調整機および押出機の間の相互連結の概念図である。
【図6】本発明に基づく別のタイプの前段調整機の側面図である。
【図7】これの端面図である。
【図8】これの平面図である。
【図9】本発明に基づく別のタイプの前段調整機の実施態様の透視図である。
【図10】図9で描いた前段調整機の側面図である。
【図11】図10の線分11−11に沿ってとった断面図である。
【図12】図10の線分12−12に沿ってとった断面図である。
【発明を実施するための形態】
【0014】
<図1〜5の実施態様>
次に図面に目を向けると、改良された前段調整機10は図1〜4に描かれている。おおまかに、前段調整機10は細長い混合容器12を含み、内部にその奥行きに沿って伸びる平行で、細長く、軸方向に伸びる一対の混合軸14および16を伴う。軸14、16はそれぞれの可変駆動部18および20と適切に連結していて、後者は同様にデジタル制御装置22に接続している。前段調整機10は下流の押出機または押出造粒機のような処理装置と共に使用するように造られている。図5に描かれているように前段調整機10は押出機24(これは単軸または2軸の機種でもよい)と連結し、これには入口26および絞ったオリフィス金型出口28、のみならず内部の、軸方向に回転可能なスクリューを持つ。
【0015】
より具体的には、容器12は細長い横断的に弓形の側壁30を持ち、これが細長く、並列して、連通している一対のチャンバー32および34、のみならず材料入口36および材料出口38を呈する。チャンバー34は図4を見ればすぐ判るように、隣接するチャンバー32よりも大きな断面積を持つ。側壁30には点検口40がありさらに前段調整機を使用中に容器12の内部へ水および/または蒸気を注入するための注入組部品42、および蒸気排出口44を装備している。容器12の反対側端末には図示の通り、端板46および48がある。
【0016】
それぞれの軸14、16には複数の放射状に外側に伸びた混合部材50および52があり、これらは前段調整機に供給された材料をかき混ぜおよび混合し、さらには材料を入口36から出口38の方向へ移送し排出するように設計されている。部材50は軸方向に部材52に対して相対的にずれていて、さらに部材50、52は間に入り込んでいることが見てとれる(すなわち、部材52は軸14および部材50が作りだす円筒状の運用包囲線図内に達し、逆も同様である)。部材50、52は軸14、16に実質的に直角に図解されているが、発明はそのようには限定されず;むしろ、部材50、52は使用者の裁量により長さおよびピッチの両方で調節できる。再度図4に言及すると、軸14は実質的にチャンバー32の中心線に沿って位置し、および軸16も同様に実質的にチャンバー34の中心線に沿って位置することが判る。
【0017】
駆動部18および20は図示した実施態様においては装置的に同一で、それぞれが駆動モーター54、歯車減速機56、および対応する歯車減速機56およびモーター54を軸14または16に相互連結する継手組部品58を含む。駆動部18および20はさらに可変周波数駆動装置59があることが好ましく、これらは速度および/または回転方向に関して軸14、16の個別の回転を選択的に、互いに独立して、可能にするように設計されている。駆動部18および20に適切な制御を与えるために、駆動装置57はそれぞれ対応するモーター54および制御装置60と一体となっている。制御装置60はコントローラ、プロセッサ、特定用途向け集積回路(ASIC)でも、または論理演算命令を実行できる他の全てのタイプのデジタルまたはアナログ機器であってもよい。機器はDell、Compaq、Gateway、または他の全てのコンピュータ製造業者で製造および販売されるパソコンまたはサーバーコンピュータであっても、WindowsTMNT、Novelネットウェア、UnixTM、または他の全てのネットワーク基本ソフトで動作するネットワークコンピュータであってすらもかまわない。駆動装置57は本発明の目的を達成するために望み通りにプログラムすることが、例えば異なる回転速度範囲、回転方向および定格電力に構成することができる。
【0018】
好適な形態では、前段調整機10は複数のロードセル62の形の秤量装置の上に支えられ、これはさらに制御装置60と適切に連動している。ロードセル62の使用により、容器12を通過する材料の滞留時間を速やかに、絶えず変動させることが可能になり、このことは米国特許第6465029に詳細に記載してあり、ここに本出願に引用して本明細書とする。
【0019】
好適な可変周波数駆動メカニズム18、20および制御装置60を使用することにより軸14、16の回転速度を高速で調整することにより望みの前段調整を達成することを可能にしながら、同時に互いにかみ合う混合部材50、52の間のあらゆる衝突を防止している。一般に、制御装置60および連動する駆動装置57はそれぞれの駆動モーター54と交信することで軸速度を制御している。さらに、軸14、16は運転者の裁量により異なる回転方向または同じ回転方向で回転させることができる。
【0020】
前段調整機10を通過する材料の滞留時間は、軸速度および/または方向を調整することにより手動でも制御できるが、むしろ、制御装置60による自動が好ましい。ロードセル62による重量情報は制御装置60に指示され、次いでこれは望む滞留時間に基づき軸速度および/または方向を変更する。
【0021】
前段調整機10は一般に動物飼料または人用食物の材料である穀類(例えば、小麦、トウモロコシ、オート麦、大豆)、肉および肉の副産物および多くの添加物(例えば、界面活性剤、ビタミン類、ミネラル類、着色剤)のようなものを処理するのに用いられる。デンプン含有穀類を処理する場合は、これらは前段調整機を通過する間に通常は少なくとも部分的に糊化される。前段調整機10は通常は約100〜212度Fの温度、約30秒〜5分の滞留時間、および大気圧またはわずかに高い圧力で運転される。
【0022】
前段調整機10用の駆動装置は軸14、16を約1000rpmまでの可変速度で回転することができるが、約200〜900rpmがより好ましい。さらに、この前段調整機の設計に固有である運転の柔軟な操作性により形状が類似した在来型の前段調整機に比べより高いレベルの蒸解(すなわち、デンプンの糊化)を可能にしている。
【0023】
<図6〜8による実施態様>
この実施態様は多くの点で上に記載したそれに類似し、細長い混合容器72を持ちその内部に長さに沿って伸びる平行な、細長い、軸方向に伸びる一対の軸74、76を伴う前段調整機70を提供する。軸74、76はそれぞれの可変駆動部78、80と適切に連動していて、後者は先に記載した制御装置22に類似したデジタル制御装置(表示なし)に順次接続している。前段調整機70は押出機や押出造粒機のような下流の処理装置と共に用いる場合もある。
【0024】
容器72には細長い、横断的に弓形の側壁82があり、これは細長く、並列して、連通している一対の同じ断面積のチャンバーのみならず、材料入口84および材料出口86を呈する。側壁82には点検口88があり、さらに前段調整機を使用中に水および/または蒸気を容器82内に注入するための注入組部品90を備えている。
【0025】
第1の実施態様と同様に、それぞれの軸74、76には複数の外側に伸びる混合部材92、94が表面に設けられ通常はそれぞれの軸の全長にわたる。部材92、94は図8に図解したように軸方向にずれかつ間に入り込み、さらに前段調整機に供給された材料をかき混ぜかつ混合しさらに材料を入口84から出口86の方向へ移送し排出するように設計されている。
【0026】
駆動部78、80は全く同じでそれぞれ駆動モーター96、歯車減速機97および継手98を持つ。駆動部は可変周波数駆動装置で、軸74、76を互いに独立して選択的に個別の回転ができるように設計されていることが好ましい。
前段調整機70は複数のロードセル100から構成される秤量装置の上に支えられ、これらは前段調整機の制御装置と適切に連動している。全て米国特許第6465029に記載されているとおりロードセルは滞留時間の変動を可能にしている。
前段調整機72は図1〜5の実施態様に関連して記載したものと同じ流儀でかつ同じ一般的な操作パラメータで用いることができる。
【0027】
<図9〜12による実施態様>
前段調整機102は細長い2段混合容器104を含み、その長さに沿って平行で細長く、軸方向に伸びかつ回転可能な一対の混合軸106および108を伴っている。軸106および108は前に記載した実施態様の場合と同様に個別の可変駆動装置(表示なし)と連結している。これらの可変駆動装置は順次デジタル制御装置に接続しているが、これも表示していない。前段調整機102も同様に下流の押出機または押出造粒機と接続するように適合している。
【0028】
容器104は細長い横断的に弓形の側壁110を持ち、これは細長く、並列して、連通している一対のチャンバー112および114のみならず材料入口116および材料出口118を呈する。チャンバー114は隣接するチャンバー112より大きな断面積を持ち、このことはこれから記載する理由により重要なことである。それぞれのチャンバー112、114には対応するチャンバーの長さに沿って間隔を開けた一連の入口120、122が装備され、チャンバー112、114の接合部に中間の一連の入口123が位置している。これらの口120、122はチャンバー内部に達する水および/または蒸気注入器が接続できるように適合している。容器104の全体にはさらに前部および後部の端板124および126だけでなく中央板128もある。
【0029】
図解したように、軸106、108は対応するチャンバー112、114内で実質的に中央に位置している。こうするために、板124に設けた前方ベアリング130が軸106、108の前方端を支え、同様に板126に固定した後方ベアリング132が軸の後方端を支える。軸106、108には後方に伸びる延長部106a、108aがベアリング132から突きだし、先に記載した可変周波数駆動装置との接合部を提供する。
【0030】
軸106には軸の長さに沿って千鳥状に位置する複数の放射状に外側に伸びる混合部材134が装備されている。それぞれの部材134(図12)は軸106の対応するネジを切った穴に納まるネジを切った内挿部分136とともに、比較的平らなパドル状部142がある外側に突き出した部分140を含む。図11で最も判りやすいように、混合部材134のパドル部142は材料が入口116から出口118に進む方向とは相対的に逆の方向に向けられている。つまり、これらの部品は前段調整機102を通過する材料の流れを妨げるように作用する。
【0031】
小さい方のチャンバー112に位置する軸108も同様にその長さに沿って交互に千鳥状の関係にある一連の混合部材144を持つ。部材144の形が幾分小さいことを除いて、部材144は部材134と全く同一である。それぞれの部材144は船外パドル状部146を呈する。ここでは、部分146の向きは部分142のそれとは逆で、すなわちそれらは材料を入口116から出口118の方向へより積極的に進めるように前方向に向いている。
【0032】
先に記載した実施態様の場合と同様に、隣接する一対の混合部材134および144は互いに軸方向にずれ、かつ間に入り込んでいる;そのため部材は自己掃除式の設計にはなっていない。これにより両軸は非常に異なる回転速度で回転しながら、同時に部材134および144の間の機械的干渉による閉鎖の可能性を防ぐことができる。
【0033】
本発明による前段調整機の設計により今まで可能だったものより高い程度まで材料を処理することが可能になった。例えば、米国特許第4752139に記載された型の以前の前段調整機ではその両軸間の相対回転速度の変更を現地調節により達成することはできなかった。すなわち、このような以前の前段調整機では、装置の製作中にひとたび回転速度差を確定すると、装置の全面的な再構築をしなくてはそれを後から変更することはできなかった。この種の通常の前段調整機ではそれぞれ小および大のチャンバー内の軸の間に2:1の速度差があった。しかしながら本発明においては、ずっと大きなかつ無限に調整可能な速度差が直ちに達成できる。かくして好適な形態においては、軸106、108の間の速度差は少なくとも5:1で、一般には3:1から18:1である。後者の差は軸108の回転速度が900rpm、および軸106が50rpmに相当する。
【0034】
この機能強化された設計は幾つかの処理上の優位さを与える。一例を挙げれば、‘139特許による在来の前段調整機の設計では、達成可能な最高蒸解度は通常約30%で、最高でも約43%であった(デンプン成分の糊化により測定したもので Mason他の「蒸解度を決定する新手法、米国穀類化学者協会、第67回年会、1982年10月26日」に記載された方法によるが、本願に引用して本明細書とする)。しかしながら本発明においては、著しくより高い蒸解割合、少なくとも50%、より好ましくは少なくとも55%、および最も好ましくは少なくとも約75%を達成することができる。と同時に、これら促進された蒸解値は在来の前段調整機と比べて同じかより短い滞留時間でさえ得られている;具体的には、このような在来の設計では最高の蒸解値を得るために約160〜185秒の滞留時間を要したのに対し、今回の前段調整機においては滞留時間はずっと少なく、この同じ蒸解を達成するのに120〜150秒台である。さらに、通常のより長い前段調整機の滞留時間を用いた場合、蒸解値の程度は通常著しく増加する。
【0035】
本発明による一つの形態において、それぞれの量のタンパク質およびデンプン(および通常は脂肪および砂糖のような他の材料)を含む人用食物または動物用飼料混合物を本発明による前段調整機で処理することにより、少なくとも約50%、より好ましくは少なくとも約75%のデンプン糊化に基づく蒸解値を達成した。このような混合物の代表例はペットおよび魚用飼料である。さらに本発明による前段調整機はより高い比機械エネルギー(SME)値を与える。在来の前段調整機は一般に比較的低いSMEを示すが、これに対しこの前段調整機は増大したSMEを与え、処理済みの開始材料当たり約1.7〜5.0、より好ましくは約1.9〜4.5kW−Hr/トンである。
【0036】
技術的によく知られているように前段調整機内で蒸解度を上げることは下流の処理の間に少ないエネルギーと滞留時間しか必要とせずにペットフードのような完全な蒸解を要求する製品を達成できるという点で有利である。かくして、本発明に基づく前段調整機を用いることにより製品の出来高を増し、かくして実質的に処理コストを低減する。
【0037】
<実施例1>
この実施例においては、標準的なドッグフード調合物を準備し本発明に基づく前段調整機を用いて前段調整した。調合物は53.0%のトウモロコシ、22.0%の家禽粉、15%の大豆粉、および10%のトウモロコシグルテン粉を含む(全ての割合は重量による)。この調合物を前段調整機入口に供給し蒸気および水の注入と共に内部で処理を受けさせた。小チャンバーの軸は900rpmの速度で逆方向に回転し、一方大チャンバーの軸は50rpmの速度で前方方向に回転した。3種類の個別の試験を前段調整機への異なる供給量で行い、これらの試験結果を下の表1に示す。表1に記録されている通り、前段調整機を用いて得られた蒸解割合の値は47.6〜50.9%の範囲で、さらに合計SME値は1.97〜3.49kW−Hr/トンまで変動した。
【0038】
【表1】
*1 F は前方の方向を指し、R は後方の方向を指す。方向性は軸の混合パドルの方向付けおよび/または反対方向に回転する軸により達成される。本実施例においては、両軸は同一方向に回転され、F方向では混合物を前方へ動かすように方向付けされ、一方R方向では混合物の前向きの動きを妨げるように方向付けされている。
【0039】
<実施例2>
この実施例においては、標準的なキャットフード調合物を準備し実施例1に説明したように前段調整した。キャットフード調合物は32%の家禽粉、28%のトウモロコシ、14%の米、13%のトウモロコシグルテン粉、3%のビートパルプ、2%のリン酸(54% H3PO4)、および8%の家禽脂肪を含む(全ての割合は重量による)。3種類の個別の試験の運転において、小チャンバーの軸は800rpmの速度で逆方向に回転し、一方大チャンバーの軸は50rpmの速度で前方方向に回転した。これらの試験結果を下の表2に示すが、ここでは蒸解割合は45.8〜48.1%まで変動し、さらに合計SME値は2.9〜3.9 kW−Hr/トンの範囲であった。
【0040】
【表2】
【0041】
<実施例3>
この実施例においては、ナマズの餌の製造に用いられる浮遊性水産飼料調合物を準備し実施例1に説明したように前段調整した。浮遊性水産飼料調合物は20%の全粒トウモロコシ、20%の魚粉、20%の脱脂米糠、15%の小麦製粉くず、10%の大豆粉、10%のビートパルプ、および5%の小麦を含む(全ての割合は重量による)。3種類の個別の試験の運転で、小径軸は800rpmの速度で逆方向に回転し、大径軸は50rpmの速度で前方方向に回転した。これらの試験結果を表3に示すがここでは蒸解は78.7〜84.5%まで変動し、さらに合計SME値は3.7 kW−Hr/トンであったことがわかる。
【0042】
【表3】
【0043】
<実施例4>
この実施例においては、鱸/鯛の餌の製造に用いられる沈降性水産飼料調合物を準備し実施例1に説明したように前段調整した。沈降性水産飼料調合物は53%の大豆粉、15%の小麦、8.5%のトウモロコシグルテン飼料、6.0%のトウモロコシ、1%のヒマワリ粉、および16%の魚油を含む。3種類の個別の試験で、小チャンバー軸は800rpmの速度で逆方向に回転し、大径軸は50rpmの速度で前方方向に回転した。これらの試験結果を表4に示すが、ここでは蒸解は72.5〜75.8%までの範囲で、さらに合計SME値は2.2〜3.2 kW−Hr/トンであったことがわかる。
【0044】
【表4】
【特許請求の範囲】
【請求項1】
それぞれの量のタンパク質およびデンプンを含む食物または飼料の混合物を処理する方法において、該混合物を処理容器内に入れて通過させる手順を含み、該容器は、一対の細長い、軸方向に回転可能な軸を備え、それぞれの軸は、外側に伸びる複数の混合部材を持ち、両軸の混合部材が軸方向にずれかつ間に入り込んでいて、前記混合物が前記容器を通過する間、前記軸を回転するものであり、
前記混合物の処理手順は、前記軸の間の回転の速度差が3:1から18:1の範囲で、それぞれ異なる速度で該軸を回転し、
前記食物または飼料の混合物を前記容器内で約100〜212度Fの温度に加熱し、
前記デンプンの糊化の進み具合で測定して少なくとも約50%の蒸解を達成することを含むことを特徴とする方法。
【請求項2】
約1.75〜5.0kW−Hr/トンの固有機械エネルギー(SME)を前記食物または飼料の混合物に与える手順を含む請求項1に記載の方法。
【請求項3】
前記SMEは、約1.9〜4.5kW−Hr/トンである請求項2に記載の方法。
【請求項4】
前記混合物の前記容器内の通過中に該容器内に蒸気を注入する手順を含む請求項1に記載の方法。
【請求項5】
前記軸の混合部材は、該軸の回転中に、該混合部材の間の衝突を防止するように方向付けされており、
前記軸の回転中に、該軸の回転速度を調整する手順を含む請求項1に記載の方法。
【請求項6】
前記軸の混合部材は、該軸の回転中に、該混合部材の間の衝突を防止するように方向付けされており、
前記軸を逆方向に回転する手順を含む請求項1に記載の方法。
【請求項7】
前記食物または飼料の混合物を前記容器内で120〜150秒間、処理する手順を含む請求項1に記載の方法。
【請求項8】
前記食物または飼料の混合物を大気圧またはわずかに高い圧力で処理する手順を含む請求項1に記載の方法。
【請求項9】
前記回転の速度差は無限に調整可能である請求項1に記載の方法。
【請求項10】
少なくとも約75%の蒸解を達成する手順を含む請求項1に記載の方法。
【請求項11】
それぞれの軸を約200〜900rpmの回転速度で回転する手順を含む請求項1に記載の方法。
【請求項1】
それぞれの量のタンパク質およびデンプンを含む食物または飼料の混合物を処理する方法において、該混合物を処理容器内に入れて通過させる手順を含み、該容器は、一対の細長い、軸方向に回転可能な軸を備え、それぞれの軸は、外側に伸びる複数の混合部材を持ち、両軸の混合部材が軸方向にずれかつ間に入り込んでいて、前記混合物が前記容器を通過する間、前記軸を回転するものであり、
前記混合物の処理手順は、前記軸の間の回転の速度差が3:1から18:1の範囲で、それぞれ異なる速度で該軸を回転し、
前記食物または飼料の混合物を前記容器内で約100〜212度Fの温度に加熱し、
前記デンプンの糊化の進み具合で測定して少なくとも約50%の蒸解を達成することを含むことを特徴とする方法。
【請求項2】
約1.75〜5.0kW−Hr/トンの固有機械エネルギー(SME)を前記食物または飼料の混合物に与える手順を含む請求項1に記載の方法。
【請求項3】
前記SMEは、約1.9〜4.5kW−Hr/トンである請求項2に記載の方法。
【請求項4】
前記混合物の前記容器内の通過中に該容器内に蒸気を注入する手順を含む請求項1に記載の方法。
【請求項5】
前記軸の混合部材は、該軸の回転中に、該混合部材の間の衝突を防止するように方向付けされており、
前記軸の回転中に、該軸の回転速度を調整する手順を含む請求項1に記載の方法。
【請求項6】
前記軸の混合部材は、該軸の回転中に、該混合部材の間の衝突を防止するように方向付けされており、
前記軸を逆方向に回転する手順を含む請求項1に記載の方法。
【請求項7】
前記食物または飼料の混合物を前記容器内で120〜150秒間、処理する手順を含む請求項1に記載の方法。
【請求項8】
前記食物または飼料の混合物を大気圧またはわずかに高い圧力で処理する手順を含む請求項1に記載の方法。
【請求項9】
前記回転の速度差は無限に調整可能である請求項1に記載の方法。
【請求項10】
少なくとも約75%の蒸解を達成する手順を含む請求項1に記載の方法。
【請求項11】
それぞれの軸を約200〜900rpmの回転速度で回転する手順を含む請求項1に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−213770(P2012−213770A)
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願番号】特願2012−101626(P2012−101626)
【出願日】平成24年4月26日(2012.4.26)
【分割の表示】特願2009−533593(P2009−533593)の分割
【原出願日】平成19年10月22日(2007.10.22)
【出願人】(504031159)
【Fターム(参考)】
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願日】平成24年4月26日(2012.4.26)
【分割の表示】特願2009−533593(P2009−533593)の分割
【原出願日】平成19年10月22日(2007.10.22)
【出願人】(504031159)
【Fターム(参考)】
[ Back to top ]