
倒れ容器検出装置
【課題】容器を搬送するコンベヤにおいて、複数の容器検出センサーで検出して倒れ容器検出の信頼性を高めるとともに、コンベヤ速度の変更がある場合に確実に排除できる倒れ容器検出装置を提供する。
【解決手段】本発明に係る倒れ容器検出装置01は、複数の容器検出センサーを搬送容器高さの上部と下部に相当する位置で上下に配置して、正常状態で搬送される容器が検出されるようにした一対の容器検出手段1と、一対の容器検出手段1から容器高さ相当以内の距離に、もう一対の容器検出手段2を設けて、倒れた状態で搬送される倒れ容器Pfが、一対の容器検出手段1の下部の容器検出センサー1aともう一対の容器検出手段2の下部の容器検出センサー2aで検出されるが、一対の容器検出手段1の上部の容器検出センサー1bともう一対の容器検出手段2の上部の容器検出センサー2bでは検出されないものである。
【解決手段】本発明に係る倒れ容器検出装置01は、複数の容器検出センサーを搬送容器高さの上部と下部に相当する位置で上下に配置して、正常状態で搬送される容器が検出されるようにした一対の容器検出手段1と、一対の容器検出手段1から容器高さ相当以内の距離に、もう一対の容器検出手段2を設けて、倒れた状態で搬送される倒れ容器Pfが、一対の容器検出手段1の下部の容器検出センサー1aともう一対の容器検出手段2の下部の容器検出センサー2aで検出されるが、一対の容器検出手段1の上部の容器検出センサー1bともう一対の容器検出手段2の上部の容器検出センサー2bでは検出されないものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、びん、缶等容器の搬送コンベヤにおける容器の倒れを検出し、排除する装置に関する。
【背景技術】
【0002】
びん、缶等容器の搬送コンベヤにおいて、搬送中の容器が倒れた場合には、倒れた容器を検出して排除する必要があり、倒れ容器の排除に当って煩雑な設定を簡素化し、排除ミスを無くす工夫がなされている(例えば、特許文献1及び特許文献2を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−2232号公報(図1)
【特許文献2】特開平11−258182号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記特許文献1によれば、コンベヤで搬送されるびんが倒れた場合、倒びんを倒びんセンサーで検知して倒びん検知信号を制御部に送り、制御部からの指令により倒びんセンサーの下流に配置している排除手段で倒びんを排除するとしている。
しかしながら、前記特許文献1の技術では、倒びんセンサーは1個のみの設置であり、倒びんセンサーを複数個設置した場合については言及されておらず、また、倒びん検知は1個の倒びんセンサーの遮光時間をコンベヤ速度等でタイマー補正するとして、倒びんの排除を倒びん検知からのタイマー時間でシフトして、倒びんが来たであろうという見做しタイミングで行っているため、排除の信頼性に欠けるという恐れがあるとともに、コンベヤ速度が変更となった場合には、倒びんの排除のタイミングがその都度変更されることになり、前記排除の信頼性がさらに薄れるという恐れがある。
【0005】
本発明は、容器を搬送するコンベヤにおいて、倒れ容器を複数の容器検出センサーで検出して倒れ容器検出の信頼性を高めるとともに、コンベヤ速度の変更がある場合に、倒れ容器を見做しタイミングで排除するのではなく、確実に排除できるようにした倒れ容器検出装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
前記の課題に対し、本発明は以下の手段により解決を図る。
(1)第1の手段の倒れ容器検出装置は、容器を搬送するコンベヤにおいて、複数の容器検出センサーを搬送容器高さの上部箇所(以下上部と称する)と下部箇所(以下下部と称する)に相当する位置で上下に配置して、正常状態(正立状態。以下同じ)で搬送される容器が検出されるようにした一対の容器検出手段と、コンベヤ搬送方向で前記一対の容器検出手段から容器高さ相当以内の距離に、前記一対の容器検出手段と同様のもう一対の容器検出手段を設けて、倒れた状態で搬送される容器(以下倒れ容器と称する)が、前記一対の容器検出手段を構成する下部の容器検出センサーと前記もう一対の容器検出手段を構成する下部の容器検出センサーとによって検出可能とされ、前記一対の容器検出手段を構成する上部の容器検出センサーと前記もう一対の容器検出手段を構成する上部の容器検出センサーとによって検出不能とされていることを特徴とする。
【0007】
(2)第2の手段の倒れ容器検出装置は、前記第1の手段の倒れ容器検出装置において、倒れ容器の検出信号を制御装置に取り込み、前記制御装置からの指令により、検出した倒れ容器を倒れ容器検出直後のタイミングで排除するように、コンベヤ搬送方向の前記一対の容器検出手段と前記もう一対の容器検出手段との間に倒れ容器排除装置を備えたことを特徴とする。
【0008】
(3)第3の手段の倒れ容器検出装置は、前記第1の手段の倒れ容器検出装置において、倒れ容器の検出信号を制御装置に取り込み、前記制御装置からの指令により、検出した倒れ容器を倒れ容器検出時点からのタイマー時間後に排除するように、コンベヤ搬送方向の前記一対の容器検出手段および前記もう一対の容器検出手段の下流側に倒れ容器排除装置を備えたことを特徴とする。
【発明の効果】
【0009】
請求項1に係わる本発明は、容器を搬送するコンベヤにおいて、複数の容器検出センサーを搬送容器高さの上部と下部に相当する位置で上下に配置して、正常状態で搬送される容器が検出されるようにした一対の容器検出手段と、コンベヤ搬送方向で前記一対の容器検出手段から容器高さ相当以内の距離に、前記一対の容器検出手段と同様のもう一対の容器検出手段を設けて、倒れ容器が、前記一対の容器検出手段を構成する下部の容器検出センサーと前記もう一対の容器検出手段を構成する下部の容器検出センサーとで検出可能とされ、前記一対の容器検出手段を構成する上部の容器検出センサーと前記もう一対の容器検出手段を構成する上部の容器検出センサーとで検出不能とされたことにより、コンベヤ速度の変更に関係なく、倒れ容器を直接的に且つ確実に検知できるという効果を有する。
【0010】
請求項2に係わる本発明は、前記請求項1に記載する倒れ容器検出装置において、倒れ容器の検出信号を制御装置に取り込み、前記制御装置からの指令により、検出した倒れ容器を倒れ容器検出直後のタイミングで排除するように、コンベヤ搬送方向の前記一対の容器検出手段と前記もう一対の容器検出手段との間に倒れ容器排除装置を備えたことにより、倒れ容器検出から倒れ容器排除までの見做しタイミングで倒れ容器を排除するのではなく、また、コンベヤ速度に関係なく、倒れ容器を直接的に且つ確実に排除できるという効果を有する。
【0011】
請求項3に係わる本発明は、前記請求項1に記載する倒れ容器検出装置において、倒れ容器の検出信号を制御装置に取り込み、前記制御装置からの指令により、検出した倒れ容器を倒れ容器検出時点からのタイマー時間シフト後に排除するように、コンベヤ搬送方向の前記一対の容器検出手段および前記もう一対の容器検出手段の下流側に倒れ容器排除装置を備えたことにより、コンベヤ速度が一定の場合等において、倒れ容器排除装置の配置をレイアウトに応じて適宜に選択できるという効果を有する。
【図面の簡単な説明】
【0012】
【図1】本発明の第1の実施の形態に係わる倒れ容器検出装置の正面図である。
【図2】図1の平面図である。
【図3】図2のA−A断面図である。
【図4】本発明の第2の実施の形態に係わる倒れ容器検出装置の平面図であり、図2に相当する図である。
【発明を実施するための形態】
【0013】
以下、この発明の実施の形態につき図面を参照しつつ詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではない。また、下記実施の形態における構成要素には、当業者が容易に想定できるもの、あるいは実質的に同一のものが含まれる。
【0014】
(発明の第1の実施の形態)
本発明の第1の実施の形態を図1から図3に基づいて説明する。
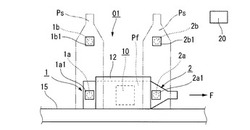
図1は、本発明の第1の実施の形態に係わる倒れ容器検出装置の正面図である。
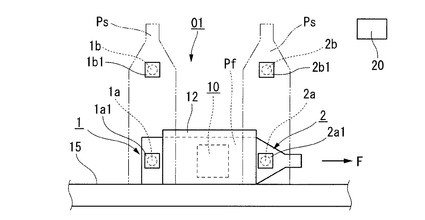
図2は、図1の平面図である。
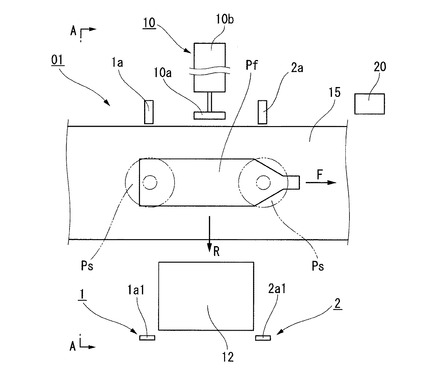
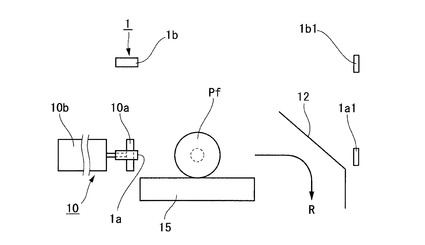
図3は、図2のA−A断面図である。
図1から図3において、搬送コンベヤ15には、正常状態(正立状態。以下正常状態と称する)で矢印F方向に搬送される容器Ps(図1では二点鎖線で示してある)の高さの上部箇所(以下上部と称する)と下部箇所(以下下部と称する)に相当する位置で、容器Psが検出されるようにした上部配置の容器検出センサー1bと下部配置の容器検出センサー1aから成る一対の容器検出手段1と、コンベヤ搬送方向で前記一対の容器検出手段1から前記容器Psの高さ相当以内の距離に、一対の容器検出手段1と同様に、上部配置の容器検出センサー2bと下部配置の容器検出センサー2aから成るもう一対の容器検出手段2が設けられて、容器検出センサー1a、容器検出センサー1b、容器検出センサー2a、容器検出センサー2bの検出信号が制御装置20に取り込まれるようになっている。
【0015】
さらに、容器検出手段1と容器検出手段2は、搬送コンベヤ15上で倒れ容器Pfが搬送されてきた場合に、一対の容器検出手段1を構成する下部の容器検出センサー1aおよびもう一対の容器検出手段2を構成する下部の容器検出センサー2aで検出されるが、容器検出手段1の上部の容器検出センサー1bと容器検出手段2の上部の容器検出センサー2bでは検出されないようになっている。
【0016】
なお、容器検出手段1および容器検出手段2には、反射板1a1と反射板1b1、および、反射板2a1と反射板2b1が設けられていて、容器検出センサー1aと容器検出センサー1bからの投光が、それぞれ反射板1a1と反射板1b1に反射して、反射光がそれぞれ容器検出センサー1aと容器検出センサー1bに受光されるようになっており、同様に、容器検出センサー2aと容器検出センサー2bからの投光が、それぞれ反射板2a1と反射板2b1に反射して、反射光がそれぞれ容器検出センサー2aと容器検出センサー2bに受光されるようになっている。そして、容器検出センサー1aと容器検出センサー1bの両者が遮光された場合、又は、容器検出センサー2aと容器検出センサー2bの両者が遮光された場合、制御装置20は、正常状態の容器Ps有りと制御装置20が判断する。また、容器検出センサー1aと容器検出センサー2aの両者が遮光されて、容器検出センサー1bと容器検出センサー2bの両者が遮光でない場合、制御装置20は、倒れ容器Pf有りと判断するようになっている。
【0017】
また、容器検出手段1と容器検出手段2の間には、倒れ容器Pfを排除する倒れ容器排除装置10が備えられていて、倒れ容器Pfを検知した場合には、制御装置20からの指令により、倒れ容器Pfが倒れ容器排除装置10によって排除されるようになっている。
ここで、倒れ容器排除装置10は、制御装置20からの指令により、アクチュエータ10bの作動によって、排除板10aが倒れ容器Pfを傾斜板12経由で矢印R方向へ押し出して排除するようになっている。
なお、傾斜板12は、排除される倒れ容器Pfが反射板1a1および反射板2a1と干渉しないように設けてあり、容器検出センサー1aと容器検出センサー2aの容器検出のための投光、受光が妨げられないような形状となっている。
【0018】
倒れ容器検出装置01は、前記説明の配置による容器検出手段1と容器検出手段2、および、前記説明の配置による倒れ容器排除装置10、制御装置20によって主に構成されている。
【0019】
次に、本発明の第1の実施の形態に係わる倒れ容器検出装置01の作用を説明する。
倒れ容器Pfは、容器検出センサー1bと容器検出センサー2bが遮光状態ではなく、容器検出センサー1aと容器検出センサー2aが遮光状態となることによって、制御装置20により容器倒れと判断され、倒れ容器検出の直後のタイミングで制御装置20からの指令により倒れ容器排除装置10が作動して、倒れ容器Pfは傾斜板12経由で矢印R方向へ排除される。
【0020】
この場合、倒れ容器Pfが一対の容器検出手段1ともう一対の容器検出手段2の両者で倒れを検出され、また、倒れ容器排除装置10が一対の容器検出手段1ともう一対の容器検出手段2の間に配置されているので、倒れ容器Pfは倒れ容器検出直後のタイミングで直接的に且つ確実に排除される。
【0021】
なお、前記説明では、一対の容器検出手段1ともう一対の容器検出手段2が、それぞれ2個の容器検出センサー1aと容器検出センサー1b、および、容器検出センサー2aと容器検出センサー2bから構成された場合を説明したが、一対の容器検出手段1ともう一対の容器検出手段2が、それぞれ前記上部、前記下部、その中間の位置の3個又はそれ以上の個数の容器検出センサーから構成されるようにしてもよく、3個の場合には、前記下部又は前記下部と前記中間の容器検出センサーの遮光により容器倒れと判断することでもよく、詳細な説明は重複した内容となるので、省略する。
【0022】
(第2の実施の形態)
次に、本発明の第2の実施の形態を図4に基づいて説明する。
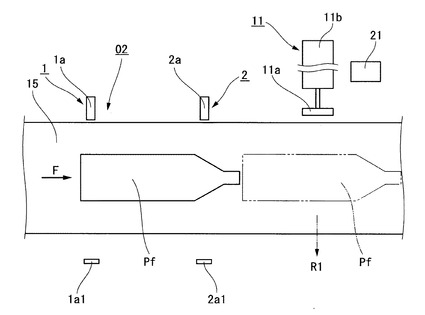
図4は、本発明の第2の実施の形態に係わる倒れ容器検出装置の平面図であり、図2に相当する図である。
図4において、図2と同じ構造のものは同じ記号を付してあり、重複する説明は省略する。
倒れ容器検出装置02は、搬送コンベヤ15に設けられた一対の容器検出手段1ともう一対の容器検出手段2、倒れ容器排除装置11、制御装置21によって主に構成されており、一対の容器検出手段1ともう一対の容器検出手段2は、前記第1の実施の形態で説明した配置と同様の配置に設けられているが、倒れ容器排除装置11は、搬送コンベヤ15において、一対の容器検出手段1およびもう一対の容器検出手段2の下流側に配置されている。
【0023】
一対の容器検出手段1およびもう一対の容器検出手段2による容器検出信号が制御装置21に入力され、倒れ容器Pfを検出した場合には、制御装置21からの指令により、倒れ容器Pfを倒れ容器検出時点からのタイマー時間シフト後に、倒れ容器排除装置11が作動するようになっていて、倒れ容器排除装置11は、制御装置21からの指令によりアクチュエータ11bの作動を介して排除板11aが倒れ容器Pfを矢印R1方向へ押し出して排除するようになっている。
【0024】
次に、本発明の第2の実施の形態に係わる倒れ容器検出装置02の作用を説明する。
搬送コンベヤ15の搬送速度が一定である等の場合には、倒れ容器Pfが一対の容器検出手段1およびもう一対の容器検出手段2で倒れ検出をされてから、倒れ容器排除装置11まで搬送される時間が一定であるので、倒れ容器排除装置11が、図4に示すように、搬送コンベヤ15において、一対の容器検出手段1およびもう一対の容器検出手段2の下流側に配置されていても、制御装置21からのタイマー時間制御で確実に倒れ容器Pfを排除でき、倒れ容器排除装置の配置をレイアウトに応じて適宜に選択できる。
【符号の説明】
【0025】
01 倒れ容器検出装置
02 倒れ容器検出装置
1 一対の容器検出手段
2 もう一対の容器検出手段
1a、1b、2a、2b 容器検出センサー
1a1、1b1、2a1、2b1 反射板
10、11 倒れ容器排除装置
10a、11a 排除板
10b、11b アクチュエータ
12 傾斜板
15 搬送コンベヤ
20、21 制御装置
Pf 倒れ容器
Ps 正常状態の容器
【技術分野】
【0001】
本発明は、びん、缶等容器の搬送コンベヤにおける容器の倒れを検出し、排除する装置に関する。
【背景技術】
【0002】
びん、缶等容器の搬送コンベヤにおいて、搬送中の容器が倒れた場合には、倒れた容器を検出して排除する必要があり、倒れ容器の排除に当って煩雑な設定を簡素化し、排除ミスを無くす工夫がなされている(例えば、特許文献1及び特許文献2を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−2232号公報(図1)
【特許文献2】特開平11−258182号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記特許文献1によれば、コンベヤで搬送されるびんが倒れた場合、倒びんを倒びんセンサーで検知して倒びん検知信号を制御部に送り、制御部からの指令により倒びんセンサーの下流に配置している排除手段で倒びんを排除するとしている。
しかしながら、前記特許文献1の技術では、倒びんセンサーは1個のみの設置であり、倒びんセンサーを複数個設置した場合については言及されておらず、また、倒びん検知は1個の倒びんセンサーの遮光時間をコンベヤ速度等でタイマー補正するとして、倒びんの排除を倒びん検知からのタイマー時間でシフトして、倒びんが来たであろうという見做しタイミングで行っているため、排除の信頼性に欠けるという恐れがあるとともに、コンベヤ速度が変更となった場合には、倒びんの排除のタイミングがその都度変更されることになり、前記排除の信頼性がさらに薄れるという恐れがある。
【0005】
本発明は、容器を搬送するコンベヤにおいて、倒れ容器を複数の容器検出センサーで検出して倒れ容器検出の信頼性を高めるとともに、コンベヤ速度の変更がある場合に、倒れ容器を見做しタイミングで排除するのではなく、確実に排除できるようにした倒れ容器検出装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
前記の課題に対し、本発明は以下の手段により解決を図る。
(1)第1の手段の倒れ容器検出装置は、容器を搬送するコンベヤにおいて、複数の容器検出センサーを搬送容器高さの上部箇所(以下上部と称する)と下部箇所(以下下部と称する)に相当する位置で上下に配置して、正常状態(正立状態。以下同じ)で搬送される容器が検出されるようにした一対の容器検出手段と、コンベヤ搬送方向で前記一対の容器検出手段から容器高さ相当以内の距離に、前記一対の容器検出手段と同様のもう一対の容器検出手段を設けて、倒れた状態で搬送される容器(以下倒れ容器と称する)が、前記一対の容器検出手段を構成する下部の容器検出センサーと前記もう一対の容器検出手段を構成する下部の容器検出センサーとによって検出可能とされ、前記一対の容器検出手段を構成する上部の容器検出センサーと前記もう一対の容器検出手段を構成する上部の容器検出センサーとによって検出不能とされていることを特徴とする。
【0007】
(2)第2の手段の倒れ容器検出装置は、前記第1の手段の倒れ容器検出装置において、倒れ容器の検出信号を制御装置に取り込み、前記制御装置からの指令により、検出した倒れ容器を倒れ容器検出直後のタイミングで排除するように、コンベヤ搬送方向の前記一対の容器検出手段と前記もう一対の容器検出手段との間に倒れ容器排除装置を備えたことを特徴とする。
【0008】
(3)第3の手段の倒れ容器検出装置は、前記第1の手段の倒れ容器検出装置において、倒れ容器の検出信号を制御装置に取り込み、前記制御装置からの指令により、検出した倒れ容器を倒れ容器検出時点からのタイマー時間後に排除するように、コンベヤ搬送方向の前記一対の容器検出手段および前記もう一対の容器検出手段の下流側に倒れ容器排除装置を備えたことを特徴とする。
【発明の効果】
【0009】
請求項1に係わる本発明は、容器を搬送するコンベヤにおいて、複数の容器検出センサーを搬送容器高さの上部と下部に相当する位置で上下に配置して、正常状態で搬送される容器が検出されるようにした一対の容器検出手段と、コンベヤ搬送方向で前記一対の容器検出手段から容器高さ相当以内の距離に、前記一対の容器検出手段と同様のもう一対の容器検出手段を設けて、倒れ容器が、前記一対の容器検出手段を構成する下部の容器検出センサーと前記もう一対の容器検出手段を構成する下部の容器検出センサーとで検出可能とされ、前記一対の容器検出手段を構成する上部の容器検出センサーと前記もう一対の容器検出手段を構成する上部の容器検出センサーとで検出不能とされたことにより、コンベヤ速度の変更に関係なく、倒れ容器を直接的に且つ確実に検知できるという効果を有する。
【0010】
請求項2に係わる本発明は、前記請求項1に記載する倒れ容器検出装置において、倒れ容器の検出信号を制御装置に取り込み、前記制御装置からの指令により、検出した倒れ容器を倒れ容器検出直後のタイミングで排除するように、コンベヤ搬送方向の前記一対の容器検出手段と前記もう一対の容器検出手段との間に倒れ容器排除装置を備えたことにより、倒れ容器検出から倒れ容器排除までの見做しタイミングで倒れ容器を排除するのではなく、また、コンベヤ速度に関係なく、倒れ容器を直接的に且つ確実に排除できるという効果を有する。
【0011】
請求項3に係わる本発明は、前記請求項1に記載する倒れ容器検出装置において、倒れ容器の検出信号を制御装置に取り込み、前記制御装置からの指令により、検出した倒れ容器を倒れ容器検出時点からのタイマー時間シフト後に排除するように、コンベヤ搬送方向の前記一対の容器検出手段および前記もう一対の容器検出手段の下流側に倒れ容器排除装置を備えたことにより、コンベヤ速度が一定の場合等において、倒れ容器排除装置の配置をレイアウトに応じて適宜に選択できるという効果を有する。
【図面の簡単な説明】
【0012】
【図1】本発明の第1の実施の形態に係わる倒れ容器検出装置の正面図である。
【図2】図1の平面図である。
【図3】図2のA−A断面図である。
【図4】本発明の第2の実施の形態に係わる倒れ容器検出装置の平面図であり、図2に相当する図である。
【発明を実施するための形態】
【0013】
以下、この発明の実施の形態につき図面を参照しつつ詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではない。また、下記実施の形態における構成要素には、当業者が容易に想定できるもの、あるいは実質的に同一のものが含まれる。
【0014】
(発明の第1の実施の形態)
本発明の第1の実施の形態を図1から図3に基づいて説明する。
図1は、本発明の第1の実施の形態に係わる倒れ容器検出装置の正面図である。
図2は、図1の平面図である。
図3は、図2のA−A断面図である。
図1から図3において、搬送コンベヤ15には、正常状態(正立状態。以下正常状態と称する)で矢印F方向に搬送される容器Ps(図1では二点鎖線で示してある)の高さの上部箇所(以下上部と称する)と下部箇所(以下下部と称する)に相当する位置で、容器Psが検出されるようにした上部配置の容器検出センサー1bと下部配置の容器検出センサー1aから成る一対の容器検出手段1と、コンベヤ搬送方向で前記一対の容器検出手段1から前記容器Psの高さ相当以内の距離に、一対の容器検出手段1と同様に、上部配置の容器検出センサー2bと下部配置の容器検出センサー2aから成るもう一対の容器検出手段2が設けられて、容器検出センサー1a、容器検出センサー1b、容器検出センサー2a、容器検出センサー2bの検出信号が制御装置20に取り込まれるようになっている。
【0015】
さらに、容器検出手段1と容器検出手段2は、搬送コンベヤ15上で倒れ容器Pfが搬送されてきた場合に、一対の容器検出手段1を構成する下部の容器検出センサー1aおよびもう一対の容器検出手段2を構成する下部の容器検出センサー2aで検出されるが、容器検出手段1の上部の容器検出センサー1bと容器検出手段2の上部の容器検出センサー2bでは検出されないようになっている。
【0016】
なお、容器検出手段1および容器検出手段2には、反射板1a1と反射板1b1、および、反射板2a1と反射板2b1が設けられていて、容器検出センサー1aと容器検出センサー1bからの投光が、それぞれ反射板1a1と反射板1b1に反射して、反射光がそれぞれ容器検出センサー1aと容器検出センサー1bに受光されるようになっており、同様に、容器検出センサー2aと容器検出センサー2bからの投光が、それぞれ反射板2a1と反射板2b1に反射して、反射光がそれぞれ容器検出センサー2aと容器検出センサー2bに受光されるようになっている。そして、容器検出センサー1aと容器検出センサー1bの両者が遮光された場合、又は、容器検出センサー2aと容器検出センサー2bの両者が遮光された場合、制御装置20は、正常状態の容器Ps有りと制御装置20が判断する。また、容器検出センサー1aと容器検出センサー2aの両者が遮光されて、容器検出センサー1bと容器検出センサー2bの両者が遮光でない場合、制御装置20は、倒れ容器Pf有りと判断するようになっている。
【0017】
また、容器検出手段1と容器検出手段2の間には、倒れ容器Pfを排除する倒れ容器排除装置10が備えられていて、倒れ容器Pfを検知した場合には、制御装置20からの指令により、倒れ容器Pfが倒れ容器排除装置10によって排除されるようになっている。
ここで、倒れ容器排除装置10は、制御装置20からの指令により、アクチュエータ10bの作動によって、排除板10aが倒れ容器Pfを傾斜板12経由で矢印R方向へ押し出して排除するようになっている。
なお、傾斜板12は、排除される倒れ容器Pfが反射板1a1および反射板2a1と干渉しないように設けてあり、容器検出センサー1aと容器検出センサー2aの容器検出のための投光、受光が妨げられないような形状となっている。
【0018】
倒れ容器検出装置01は、前記説明の配置による容器検出手段1と容器検出手段2、および、前記説明の配置による倒れ容器排除装置10、制御装置20によって主に構成されている。
【0019】
次に、本発明の第1の実施の形態に係わる倒れ容器検出装置01の作用を説明する。
倒れ容器Pfは、容器検出センサー1bと容器検出センサー2bが遮光状態ではなく、容器検出センサー1aと容器検出センサー2aが遮光状態となることによって、制御装置20により容器倒れと判断され、倒れ容器検出の直後のタイミングで制御装置20からの指令により倒れ容器排除装置10が作動して、倒れ容器Pfは傾斜板12経由で矢印R方向へ排除される。
【0020】
この場合、倒れ容器Pfが一対の容器検出手段1ともう一対の容器検出手段2の両者で倒れを検出され、また、倒れ容器排除装置10が一対の容器検出手段1ともう一対の容器検出手段2の間に配置されているので、倒れ容器Pfは倒れ容器検出直後のタイミングで直接的に且つ確実に排除される。
【0021】
なお、前記説明では、一対の容器検出手段1ともう一対の容器検出手段2が、それぞれ2個の容器検出センサー1aと容器検出センサー1b、および、容器検出センサー2aと容器検出センサー2bから構成された場合を説明したが、一対の容器検出手段1ともう一対の容器検出手段2が、それぞれ前記上部、前記下部、その中間の位置の3個又はそれ以上の個数の容器検出センサーから構成されるようにしてもよく、3個の場合には、前記下部又は前記下部と前記中間の容器検出センサーの遮光により容器倒れと判断することでもよく、詳細な説明は重複した内容となるので、省略する。
【0022】
(第2の実施の形態)
次に、本発明の第2の実施の形態を図4に基づいて説明する。
図4は、本発明の第2の実施の形態に係わる倒れ容器検出装置の平面図であり、図2に相当する図である。
図4において、図2と同じ構造のものは同じ記号を付してあり、重複する説明は省略する。
倒れ容器検出装置02は、搬送コンベヤ15に設けられた一対の容器検出手段1ともう一対の容器検出手段2、倒れ容器排除装置11、制御装置21によって主に構成されており、一対の容器検出手段1ともう一対の容器検出手段2は、前記第1の実施の形態で説明した配置と同様の配置に設けられているが、倒れ容器排除装置11は、搬送コンベヤ15において、一対の容器検出手段1およびもう一対の容器検出手段2の下流側に配置されている。
【0023】
一対の容器検出手段1およびもう一対の容器検出手段2による容器検出信号が制御装置21に入力され、倒れ容器Pfを検出した場合には、制御装置21からの指令により、倒れ容器Pfを倒れ容器検出時点からのタイマー時間シフト後に、倒れ容器排除装置11が作動するようになっていて、倒れ容器排除装置11は、制御装置21からの指令によりアクチュエータ11bの作動を介して排除板11aが倒れ容器Pfを矢印R1方向へ押し出して排除するようになっている。
【0024】
次に、本発明の第2の実施の形態に係わる倒れ容器検出装置02の作用を説明する。
搬送コンベヤ15の搬送速度が一定である等の場合には、倒れ容器Pfが一対の容器検出手段1およびもう一対の容器検出手段2で倒れ検出をされてから、倒れ容器排除装置11まで搬送される時間が一定であるので、倒れ容器排除装置11が、図4に示すように、搬送コンベヤ15において、一対の容器検出手段1およびもう一対の容器検出手段2の下流側に配置されていても、制御装置21からのタイマー時間制御で確実に倒れ容器Pfを排除でき、倒れ容器排除装置の配置をレイアウトに応じて適宜に選択できる。
【符号の説明】
【0025】
01 倒れ容器検出装置
02 倒れ容器検出装置
1 一対の容器検出手段
2 もう一対の容器検出手段
1a、1b、2a、2b 容器検出センサー
1a1、1b1、2a1、2b1 反射板
10、11 倒れ容器排除装置
10a、11a 排除板
10b、11b アクチュエータ
12 傾斜板
15 搬送コンベヤ
20、21 制御装置
Pf 倒れ容器
Ps 正常状態の容器
【特許請求の範囲】
【請求項1】
容器を搬送するコンベヤにおいて、複数の容器検出センサーを搬送容器高さの上部と下部に相当する位置で上下に配置して、正常状態(正立状態)で搬送される容器が検出されるようにした一対の容器検出手段と、コンベヤ搬送方向で前記一対の容器検出手段から容器高さ相当以内の距離に、もう一対の容器検出手段を設けて、倒れた状態で搬送される倒れ容器が、前記一対の容器検出手段を構成する下部の容器検出センサーと前記もう一対の容器検出手段を構成する下部の容器検出センサーとによって検出可能とされ、前記一対の容器検出手段を構成する上部の容器検出センサーと前記もう一対の容器検出手段を構成する上部の容器検出センサーとによって検出不能とされていることを特徴とする倒れ容器検出装置。
【請求項2】
請求項1に記載する倒れ容器検出装置において、倒れ容器の検出信号を制御装置に取り込み、前記制御装置からの指令により、検出した倒れ容器を倒れ容器検出直後のタイミングで排除するように、コンベヤ搬送方向の前記一対の容器検出手段と前記もう一対の容器検出手段との間に倒れ容器排除装置を備えたことを特徴とする倒れ容器検出装置。
【請求項3】
請求項1に記載する倒れ容器検出装置において、倒れ容器の検出信号を制御装置に取り込み、前記制御装置からの指令により、検出した倒れ容器を倒れ容器検出時点からのタイマー時間後に排除するように、コンベヤ搬送方向の前記一対の容器検出手段および前記もう一対の容器検出手段の下流側に倒れ容器排除装置を備えたことを特徴とする倒れ容器検出装置。
【請求項1】
容器を搬送するコンベヤにおいて、複数の容器検出センサーを搬送容器高さの上部と下部に相当する位置で上下に配置して、正常状態(正立状態)で搬送される容器が検出されるようにした一対の容器検出手段と、コンベヤ搬送方向で前記一対の容器検出手段から容器高さ相当以内の距離に、もう一対の容器検出手段を設けて、倒れた状態で搬送される倒れ容器が、前記一対の容器検出手段を構成する下部の容器検出センサーと前記もう一対の容器検出手段を構成する下部の容器検出センサーとによって検出可能とされ、前記一対の容器検出手段を構成する上部の容器検出センサーと前記もう一対の容器検出手段を構成する上部の容器検出センサーとによって検出不能とされていることを特徴とする倒れ容器検出装置。
【請求項2】
請求項1に記載する倒れ容器検出装置において、倒れ容器の検出信号を制御装置に取り込み、前記制御装置からの指令により、検出した倒れ容器を倒れ容器検出直後のタイミングで排除するように、コンベヤ搬送方向の前記一対の容器検出手段と前記もう一対の容器検出手段との間に倒れ容器排除装置を備えたことを特徴とする倒れ容器検出装置。
【請求項3】
請求項1に記載する倒れ容器検出装置において、倒れ容器の検出信号を制御装置に取り込み、前記制御装置からの指令により、検出した倒れ容器を倒れ容器検出時点からのタイマー時間後に排除するように、コンベヤ搬送方向の前記一対の容器検出手段および前記もう一対の容器検出手段の下流側に倒れ容器排除装置を備えたことを特徴とする倒れ容器検出装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−91921(P2012−91921A)
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願番号】特願2010−242357(P2010−242357)
【出願日】平成22年10月28日(2010.10.28)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
【Fターム(参考)】
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願日】平成22年10月28日(2010.10.28)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
【Fターム(参考)】
[ Back to top ]