
偏向器
【課題】十分な設計自由度を得ることができ、かつ可動板の変位角度を正確に検出できる偏向器を提供すること。
【解決手段】ミラー101と、ベースフレーム107と、ベースフレーム107に対してミラー101を揺動可能に支持する一対のトーションバー105a、105bと、ミラー101に設けられた駆動コイル102と、駆動コイル102に作用する磁束を生成する永久磁石108a、108bと、ミラー101の揺動角を電気特性の変化として出力する静電容量センサ230a、230bと、駆動コイル102の二端のうち第一端と静電容量センサ230a、230bの電気端子の一端とをミラー101上で電気的に接続する接続部220と、接続部220からトーションバー105a、105bを通してベースフレーム107へ至る第一の配線111とを有する。
【解決手段】ミラー101と、ベースフレーム107と、ベースフレーム107に対してミラー101を揺動可能に支持する一対のトーションバー105a、105bと、ミラー101に設けられた駆動コイル102と、駆動コイル102に作用する磁束を生成する永久磁石108a、108bと、ミラー101の揺動角を電気特性の変化として出力する静電容量センサ230a、230bと、駆動コイル102の二端のうち第一端と静電容量センサ230a、230bの電気端子の一端とをミラー101上で電気的に接続する接続部220と、接続部220からトーションバー105a、105bを通してベースフレーム107へ至る第一の配線111とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、偏向器に関し、特に電磁力を用いた偏向器に関する。
【背景技術】
【0002】
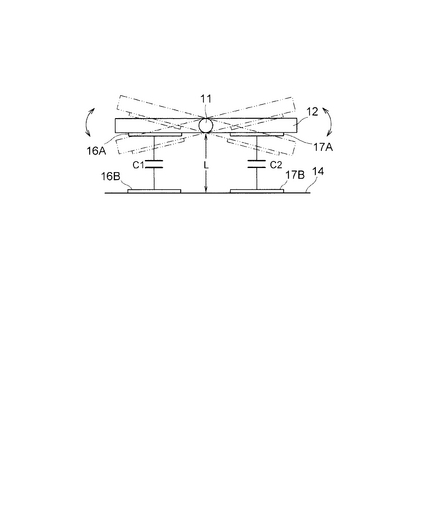
偏向器のミラーの変位角を検出する構成として、例えば、特許文献1に開示された構成が知られている。図14は、特許文献1に開示された構成を示す。本構成では、静電容量式の変位角検出方法を用いている。ミラー12の裏面側に、軸11に対して対称な位置に電極16A、17Aを設ける。ガラス基板14側に電極16A、17Aと対をなす電極16B、17Bを設ける。これにより、コンデンサC1、C2を構成する。そして、ミラー12の角度変位を伴う両コンデンサC1、C2の容量差に基づいてミラー12の変位角を検出する。
【0003】
【特許文献1】特開平7−218857号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示された構成では、ミラー12の角度を検出する静電容量の片側の電極16A、17Aが可動板であるミラー12上に存在する。これにより、静電容量を検出するために、電極16A、17Aに接続された配線を、可動板を支持するトーションバー上を経由して偏向器外へ引き出す必要がある。このため、トーションバー上に配線を形成しなければならない。この結果、偏向器を設計する自由度が低下してしまうという問題がある。
【0005】
本発明は、上記に鑑みてなされたものであって、十分な設計自由度を得ることができ、かつ可動板の変位角度を正確に検出できる偏向器を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明によれば、可動板と、固定部と、固定部に対して可動板を揺動可能に支持する一対の弾性部材と、可動板に設けられた駆動コイルと、駆動コイルに作用する磁束を生成する磁束発生手段と、可動板の揺動角を電気特性の変化として出力する角度検出手段と、駆動コイルの二端のうち第一端と角度検出手段の電気端子の一端とを可動板上で電気的に接続する接続部と、接続部から弾性部材を通して固定部へ至る第一の配線と、を有することを特徴とする偏向器を提供できる。
【0007】
また、本発明の好ましい態様によれば、角度検出手段は、可動板上の第一の電極と、第一の電極に対向して設けられた第二の電極との間の静電容量に基づいて可動板の揺動角を検出し、接続部は第一の電極と駆動コイルの第一端を接続することが望ましい。
【0008】
また、本発明の好ましい態様によれば、固定部に形成した第二の電極に接続されており、第一の電極と第二の電極との間の静電容量を検出する静電容量検出回路と、静電容量検出回路の動作に必要な参照信号を生成する参照信号生成回路と、駆動コイルの駆動指令信号と参照信号を足し合わせる加算器と、加算器の出力を増幅し駆動コイルに供給する増幅器とを備え、増幅器の出力は、第一の配線と固定部側で接続されていることが望ましい。
【0009】
また、本発明の好ましい態様によれば、固定部に形成した第二の電極に接続されており、第一の電極と第二の電極との間の静電容量を検出する静電容量検出回路と、静電容量検出回路の動作に必要な参照信号を生成し第二の電極に供給する参照信号生成回路と、駆動コイルの駆動指令信号を増幅する増幅器と、駆動コイルの第二端に可動板上で電気的に接続され、接続部から弾性部材を通して固定部へ至る第二の配線と、を備え、増幅器の出力は第二の配線と固定部側で接続されており、第一の配線は固定電位へ接続されていることが望ましい。
【0010】
また、本発明の好ましい態様によれば、参照信号生成回路は、偏向器の駆動周波数帯域より離れた周波数の参照信号を生成することが望ましい。
【0011】
また、本発明の好ましい態様によれば、参照信号生成回路は、駆動周波数帯域の最大値に対して所定倍だけ高い帯域の周波数の参照信号を生成することが望ましい。
【0012】
また、本発明の好ましい態様によれば、増幅器は、駆動コイルへの電流が駆動指令信号に比例するように制御を行う電流増幅回路より構成されており、参照信号生成回路は、第一の電極における電圧の参照信号の周波数成分が一定振幅になるように振幅制御を行う振幅制御手段を有することが望ましい。
【0013】
また、本発明の好ましい態様によれば、増幅器は、駆動コイルへの電流が駆動指令信号に比例するように制御を行う電流増幅回路より構成されており、静電容量検出回路は、容量を検出した値を、第一の電極における電圧の参照信号の周波数成分の振幅で除算する除算器を備えていることが望ましい。
【0014】
また、本発明の好ましい態様によれば、第一の電極は可動板の端面に形成した櫛歯であり、第二の電極は可動板の端面の櫛歯と対向した固定端より延在して設置した櫛歯であることが望ましい。
【0015】
また、本発明の好ましい態様によれば、第一の電極は可動板の回転軸に対して対称に可動板上へ形成した複数の電極であり、第二の電極は可動板上の複数の電極と対向している複数の電極であり、可動板上の電極と可動板上の電極に対向した電極との容量において、対称に配置した容量の差を角度とすることが望ましい。
【発明の効果】
【0016】
本発明では、可動板は、一対の弾性部材により固体部に対して揺動可能に支持されている。可動板には駆動コイルが設けられている。磁束発生手段は、駆動コイルに作用する磁束を生成する。また、角度検出手段は、可動板の揺動角を電気特性の変化として出力する。そして、接続部は、駆動コイルの二端のうち第一端と角度検出手段の電気端子の一端とを可動板上で電気的に接続している。また、第一の配線は、接続部から弾性部材を通して固定部へ至っている。この構成では、弾性部材上には、少なくとも第一の配線が形成されていれば良い。このため、十分な設計自由度を得ることができる。また、角度検出手段は、可動板の揺動角を電気特性の変化として検出する。このため、可動板の変位角度を正確に検出できる。この結果、十分な設計自由度を得ることができ、かつ可動板の変位角度を正確に検出できる偏向器を提供することができる。
【発明を実施するための最良の形態】
【0017】
以下に、本発明に偏向器の実施例を図面に基づいて詳細に説明する。なお、この実施例により、この発明が限定されるものではない。
【実施例1】
【0018】
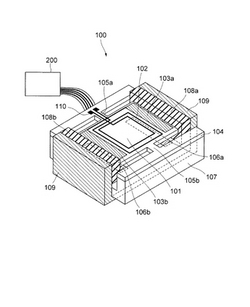
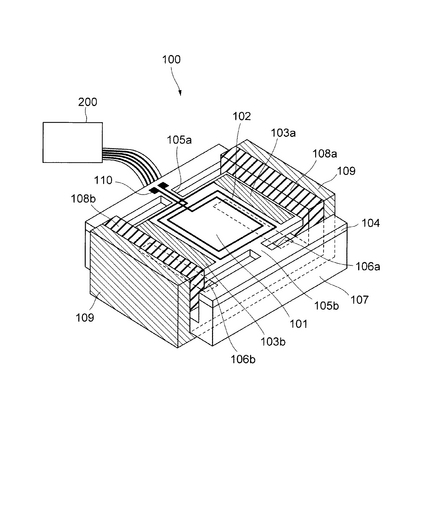
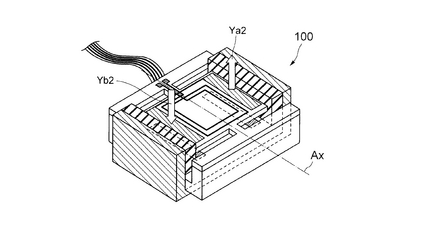
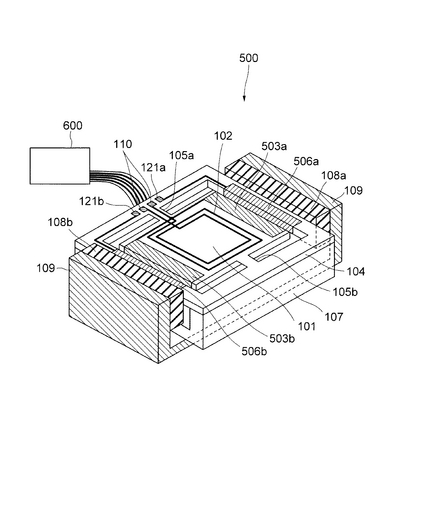
図1は、本発明の実施例1に係る偏向器100の概略構成を示す。偏向器100は、マイクロマシン技術を用いて製造されている。ミラー101は、略矩形形状を有し、空間磁束中に配置されている。ミラー101の表面側には反射面が形成されている。また、ミラー101の裏面側には、駆動コイル102と可動部電極103aと可動部電極103bとが形成されている。ここで、表面とは、図1において上側の見えている面をいう。裏面とは、図1において下側の見えていない面をいう。ミラー101は、可動板に対応する。可動部電極103aと可動部電極103bとは、ミラー101の略矩形形状の対向する二つの辺近傍に形成されている。
【0019】
また、支持体104、トーションバー105a、105b、ミラー101、駆動コイル102は、それぞれシリコンマイクロマシニングの技術を用いてシリコンウエハ上に一体的に形成されている。その後、シリコンウエハを切断、固定部電極106aと固定部電極106bとを形成したベースフレーム107に接着する。そして、永久磁石108a、108bとヨーク109からなる部材と組み合わせることにより完成する。永久磁石108a、108bとヨーク109は、磁束発生手段に対応する。支持体104、ベースフレーム107は、固定部に対応する。
【0020】
支持体104上に形成された電極部(電極パッド)110から駆動コイル102に電流を印加すると、永久磁石108a、108bにより発生する磁束と駆動コイル102に流れる電流との相互関係によりローレンツ力が働く。ミラー101は、2つのトーションバー105a、105bを介して支持体104に接続されている。トーションバー105a、105bは、弾性部材に対応する。ローレンツ力が働くことにより、トーションバー105a、105bを通る回転軸を中心にミラー101が回転する。電流の向きが逆になると、ローレンツ力が働く方向が逆になる。このとき、ミラー101はトーションバー105a、105bを通る回転軸を中心に反対方向に回転する。ミラー101の反射面に、光源(不図示)からレーザー光を照射する。そして、駆動コイル102に電流を印加する。これにより、ミラー101は揺動する。ミラー101の回転角に対応して、レーザー光の反射光は、ミラー101で偏向される。ミラー101の回転角は電流値により定まる。ミラー101の回転角と電流値との関係は、非線形であり、かつ経時変化する。このため、ミラー101を正確な角度に変位(偏向)させたいときは、ミラー101の回転角を検出する手段を用いて、検出した回転角が目標角になるように駆動電流を制御する。
【0021】
ここで、「揺動」とは、所定の一本の仮想的な軸の周りの繰り返し往復運動をいう。しかしながら、これに限られるものではなく、所定の一本の仮想的な軸の周りの単なる傾斜も含むものをいう。例えば、可動板が揺動するとは、可動板が一本の軸の周りに傾斜すること、及び繰り返し振動することを意味する。また、ミラー101の回転角とは、ミラー101が揺動するときの角度(揺動角)をいう。
【0022】
本実施形態の偏向器100は、静電容量を用いた角度検出手段(角度センサ)を備えている。可動部電極103aと固定部電極106aとは、それぞれ対向するように配置されている。同様に、可動部電極103bと固定部電極106bとは、それぞれ対向するように配置されている。可動部電極103a、103bは、第一の電極に対応する。固定部電極106a、106bは、第二の電極に対応する。電極間の静電容量はミラー101の回転角に応じて増減する。このため、この静電容量値を用いてミラー101の回転角を検出する事ができる。ここで、可動部電極103aと固定部電極106aとにより静電容量センサ230a(図5参照)を構成する。可動部電極103bと固定部電極106bとにより静電容量センサ230b(図5参照)を構成する。静電容量センサ230a、230bは、角度検出手段に対応する。静電容量センサ230aと静電容量センサ230bとは、ミラー101の回転軸に対して対称に配置されている。このため、容量センサ230a、230bの容量変化は相補的に現れる。なお、静電容量センサ230aと静電容量センサ230bとは、複数の電極に対応する。
【0023】
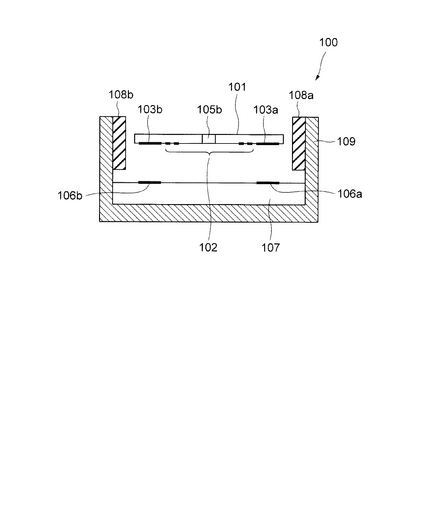
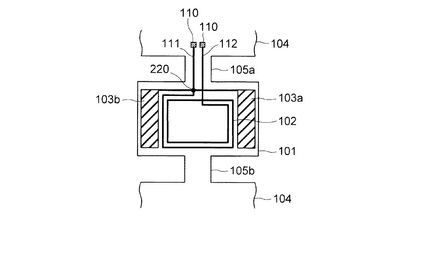
図2は、偏向器100の断面構成を示す。上述したように、ミラー101の裏面側には、駆動コイル102が形成されている。また、ミラー101の対向する位置には、可動部電極103a、103bが設けられている。可動部電極103a、103bに対向する位置に、それぞれ固定部電極106a、106bが形成されている。さらに、ミラー101の外側に一対の永久磁石108a、108bが設けられている。永久磁石108a、108bは、ヨーク109に支持されている。ヨーク109は、磁性材料で構成されている。
【0024】
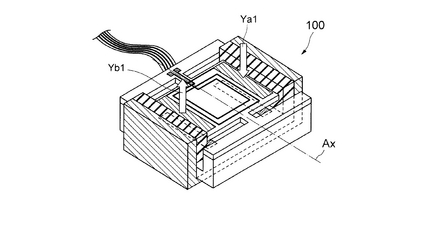
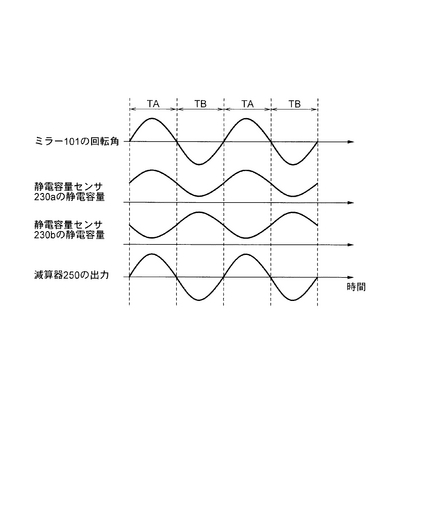
図3−1、図3−2は、それぞれミラー101の回転方向を示す図である。偏向器100のミラー101は、回転軸AXの周りに、図3−1の矢印Ya1、Yb1で示す方向、または図3−2の矢印Ya2、Yb2で示す方向へ回転する。図4を用いてミラー101の回転角と容量センサ230a、230bの容量変化の関係について説明する。
【0025】
偏向器100のミラー101が、支持体104に対して略平行である平行状態から、図3−1の矢印Ya1、Yb1で示す向きへ回転し、再び平行状態へ戻るまでを時間期間TAとする。このとき、可動部電極103aと固定部電極106aとは接近する。これにより、静電容量センサ230aの静電容量は増加する。また、可動部電極103bと固定部電極106bとは離れる。これにより、静電容量センサ230bの静電容量は減少する。ミラー101が矢印Ya1、Yb1で示す向きの最大回転角に達したとき、可動部電極103aと固定部電極106aの距離は最も接近する。このため、静電容量センサ230aの静電容量は最大となる。このとき、可動部電極103bと固定部電極106bとの距離は最も離れる。このため、静電容量センサ230bの静電容量は最小となる。
【0026】
これに対して、ミラー101が平行状態から、図3−2の矢印Ya2、Yb2で示す向きへ回転し、再び平行状態へ戻るまでを時間期間TBとする。このとき、可動部電極103aと固定部電極106aとは離れる。これにより、静電容量センサ230aの静電容量は減少する。また、可動部電極103bと固定部電極106bとは接近する。これにより、静電容量センサ230bの静電容量は、増加する。ミラー101が矢印Ya2、Yb2で示す向きの最大回転角に達したとき、可動部電極103aと固定部電極106aの距離は最も離れる。このため、静電容量センサ230aの静電容量は最小となる。可動部電極103bと固定部電極106bとの距離は最も接近する。このため、静電容量センサ230bの静電容量は最大となる。静電容量センサ230a、230bは、このように、角度検出手段に対応する。角度検出手段、即ち角度センサは、静電容量を用いているので簡単な構成とすることができる。
【0027】
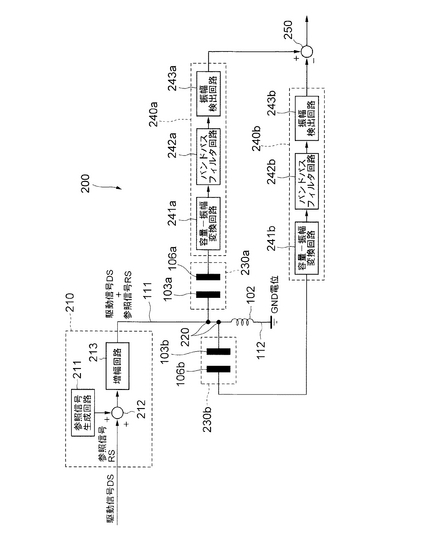
次に、静電容量センサ230a、230bとミラー101の回転角を検出する回路200について説明する。図5は、回路200の概略構成を示す。可動部電極103aと可動部電極103bとは、ミラー101の裏面において駆動コイル102の第一端と第一の配線111と接続部220で接続されている。第一の配線111は、トーションバー105a上を経由してミラー101の外へ取り出される。取り出された第一の配線111は、偏向器100の外部に設置された駆動回路210へ接続されている。駆動コイル102の第二端は、第二の配線112と接続されている。第二の配線112は、トーションバー105aを経由して、偏向器100の外部に設置された静電容量検出回路の基準電位、例えばGND電位に接続されている。基準電位は、固定電位に対応する。
【0028】
駆動回路210の加算器212は、駆動信号DSと参照信号生成回路211で生成された参照信号RSとを加算する。加算された信号は、増幅回路213で増幅される。増幅回路213は、増幅器に対応する。第一の配線111には、ミラー101を回転させるための駆動信号DSと容量−振幅変換回路241a、241bを動作させるための参照信号RSを加算した信号を印加する。可動部電極103a、103bは、駆動回路210から遠く、かつ至近に存在する駆動コイル102により静電容量検出回路の基準電位に終端される。これにより、対ノイズ性が高く、品質の高い容量検出を行うことができる。
【0029】
静電容量検出回路240aは、静電容量センサ230aの固定部電極106aに接続されている。静電容量検出回路240bは、静電容量センサ230bの固定部電極106bに接続されている。
【0030】
静電容量検出回路240aは、容量−振幅変換回路241aと、バンドパスフィルタ回路242aと、振幅検出回路243aとから構成されている。また、静電容量検出回路240bは、容量−振幅変換回路241bと、バンドパスフィルタ回路242bと、振幅検出回路243bとから構成されている。後述するように、静電容量センサ230a、230bには、それぞれ参照信号RSが印加されている。容量−振幅変換回路241a、241bは、参照信号RSを印加したときに静電容量センサ230a、230bに流れる電流を検出する。そして、容量−振幅変換回路241a、241bは、静電容量センサ230a、230bの静電容量値に比例した振幅の信号を出力する。
【0031】
バンドパスフィルタ回路242a、242bは、それぞれ容量−振幅変換回路241a、241bの出力信号に対して参照信号RSの周波数成分のみを通過させる。これにより、バンドパスフィルタ回路242a、242bは、駆動信号DS由来の信号などの回転角検出に不要な信号を除去する。
【0032】
振幅検出回路243a、243bは、それぞれバンドパスフィルタ回路242a、242bの出力信号の振幅を検出する。そして、振幅検出回路243a、243bは、静電容量センサ230a、230bの容量値に相当した信号を出力する。上述したように、静電容量センサ230aと静電容量センサ230bとの静電容量変化は、相補的に現れる。そして、減算器250は、静電容量センサ230aに接続された静電容量検出回路240aと静電容量センサ230bに接続された静電容量検出回路240bとの出力の差を導出する。これにより、ミラー101の回転角を求めることができる。このように、容量差を用いることで容量検出時の同相ノイズの影響を低減できる。この結果、正確な角度検出が可能となる。
【0033】
静電容量センサ230aと静電容量センサ230bとには、参照信号RSと駆動信号DSとが加算された信号が印加されている。そして、容量−振幅検出回路241a、241bの出力を、参照信号RSの周波数帯域を通過させるバンドパスフィルタ回路242a、242bを通すことで、駆動信号DSの影響を除去できる。
【0034】
参照信号RSの周波数は、駆動周波数帯域より離れた値に設定されている。さらに好ましくは、参照信号RSの周波数は、駆動周波数帯域の最大値に対して所定倍だけ高い帯域の周波数に設定されていることが望ましい。例えば、所定倍として略10倍程度高い帯域を設定できる。これにより、例えば、バンドパスフィルタ回路242a、242bを一次、Q=1としたとき、容量検出における駆動信号DSの影響を略10分の一にまで低減することができる。このため、精度の良い回転角検出を行うことができる。また、参照信号RSを駆動周波数帯域よりも所定倍だけ高い周波数側に設定すると、直流成分を用いてミラー101を駆動できる。このため、さらに精度の良い回転角検出を行うことができる。
【0035】
また、駆動信号DSに注目すると、駆動コイル102にも駆動信号DSと参照信号RSとが加算された信号が印加されている。ここで、参照信号RSは、ミラー101の駆動周波数帯域の最大値に対して所定倍だけ離れた値、例えば10倍程度高い値である。このため、参照信号RSにより発生する揺動成分も、略10分の一にまで減少させることができる。この結果、安定してミラー101を駆動する事ができる。
【0036】
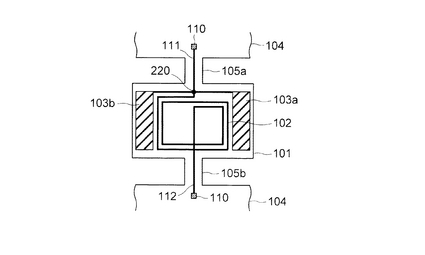
次に、トーションバー105a、105b上の電気的な配線について説明する。図6−1、図6−2は、それぞれ本実施例におけるトーションバー105a、105b上の配線の構成を示す。また、図6−3は、単純にすべての配線を引き出したときの配線の構成を示す。
【0037】
まず、図6−3に示すような単純にすべての配線を引き出したときの構成について説明する。駆動コイル102に結線される2本の配線と、可動部電極103a、可動部電極103bにそれぞれ結線される2本の配線との、合計4本の配線がトーションバー105a上に配置されている。製造上の制限から、配線の線幅及び線間の下限値は制限される。このため、トーションバー105aは、所定の幅以下には細くできなくなってしまう。トーションバー105a、105bの幅は、トーションバー105a、105bの弾性係数を決定するのに重要なパラメータである。このように、単純にすべての配線を引き出してしまうと、トーションバー105a、105bの幅を所定値以上にしなければならない。この結果、偏向器の設計の自由度に制約が生じてしまう。
【0038】
図6−1は、本実施例におけるトーションバー105a上の配線の構成を示す。ミラー101上で可動部電極103a、可動部電極103bが駆動コイル102の一端と結線されている。これにより、トーションバー105a上に配置される配線は、駆動コイル102に接続される2本の配線のみとなる。配線数が4本(図6−3)から2本へ減少したことで、図6−3に示す構成に比較して、トーションバー105aの幅を細くすることができる。このため、設計の自由度が高くなる。具体的には、トーションバー105aの幅を細くすることにより、トーションバー105aを高い柔軟性を有する構成にできる。この結果、より駆動感度の高い偏向器、及びより偏向角の大きな偏向器を実現できる。
【0039】
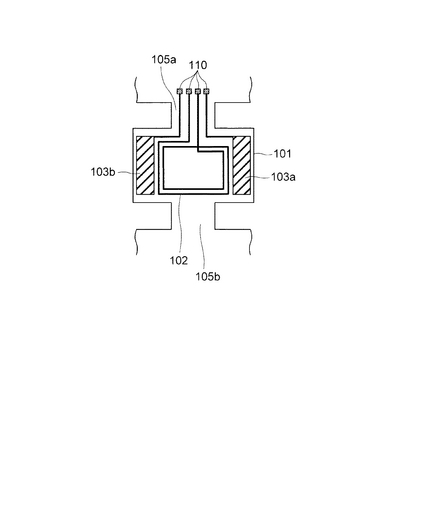
図6−1に示した構成では、駆動コイル102の2本の配線を片方のトーションバー105a上に形成している。しかしながら、これに限られず、図6−2に示すように、一対のトーションバー105a、105bに、各々1本ずつの配線を通す構成とすることもできる。図6−2で示す構成では、図6−1で示した構成に比較して、さらに設計の自由度を高めることができる。
【0040】
上述したように、トーションバー105a、105bの上の配線の数を、単純に引き出したときに比較して減らした構成により静電容量センサ230a、230bの容量を検出できる。この結果、角度検出手段を備えた偏向器100において、トーションバー105a、105bの設計の自由度を高めることができる。
【0041】
なお、本実施例では角度検出手段として、静電容量センサ230a、230bを用いる構成を用いている。しかしながら、これに限られるものではなく、角度検出手段は以下の(1)、(2)で説明する方式の構成とすることもできる。
(1)トーションバー105a、105bの歪みをインピーダンスで検出する方式
(2)ミラー101(可動板)上とベースフレーム107(固定部)上とに検出用コイルを設けて、これら2コイル間の相互誘導量を検出する方式
【0042】
上記(1)、(2)の構成としたときでも、ミラー101の裏面の接続部220において、駆動コイル102と角度検出手段との一端を接続する。これにより、トーションバー105a、105b上の配線を増やすことなく角度を検出できる。この結果、トーションバー105a、105bの設計の自由度を高めることができる。
【0043】
また、本実施例は、静電容量検出回路240a、240bを偏向器100の外に配置する構成である。しかしながら、これに限られず、静電容量検出回路240a、240bを支持体104やベースフレーム107上に形成又は配置する構成としたときでも同様の効果を得ることができる。さらに、本実施例では磁束を発生させる構成として永久磁石108a、108bとヨーク109を用いたが、電磁石とヨークを用いる構成でも良い。
【0044】
(第一の変形例)
次に、本実施例の第1の変形例について説明する。駆動信号DSは、制御性を考慮すると電流信号とすることが望ましい。例えば、上記実施例1の構成において、電流制御する場合を考える。まず、駆動信号DSと参照信号RSとを加算した信号を、電圧電流変換回路を介して電流信号に変換する。変換された電流信号を、駆動コイル102に印加する。ここで、静電容量センサ230a、230bに印加される参照信号RSの電圧振幅は、駆動コイル102の抵抗値により変化してしまう。このため、静電容量センサ230a、230bの容量が不変で一定のときでも、静電容量検出回路243a、243bの出力は、参照信号RSの電圧振幅に比例して増減してしまうことが考えられる。このように、実施例1の構成において単純に電流制御を行なうと、上述の不都合を生ずるおそれがある。以下の変形例は、このような点を考慮した回路構成を備えている。
【0045】
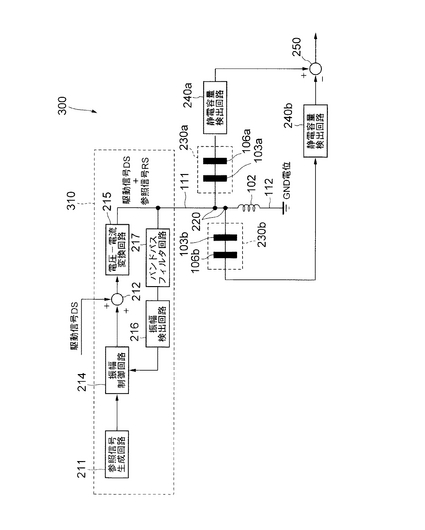
本変形例では、図7に示した回路を用いて、静電容量センサ230a、230bに印加される参照信号RSの電圧振幅を一定に保つように参照信号RSの電流振幅を制御する。図7における静電容量検出回路240a、240bは、上記実施例1と同一の構成である。即ち、静電容量検出回路240a、240bは、容量−振幅変換回路と、バンドパスフィルタ回路と、振幅検出回路とから構成されている。同一構成の重複する説明は省略する。
【0046】
本変形例の駆動回路310は、電圧−電流変換回路215を介して駆動信号DSと参照信号RSとを加算した信号に比例した電流信号を第一の配線111に印加する。電圧−電流変換回路215は、電流増幅回路に対応する。バンドパスフィルタ回路217は、第一の配線111における電圧信号のうち、参照信号RSの周波数成分のみを検出する。振幅検出回路216は、バンドパスフィルタ回路217の出力信号の振幅値を出力する。これにより、駆動コイル102の結線部における参照信号RSの周波数成分の電圧振幅を検出できる。振幅制御回路214と振幅検出回路216とバンドパスフィルタ回路217とは、振幅制御手段に対応する。参照信号生成回路211は、参照信号RSを生成する。生成された参照信号RSは、振幅制御回路214を介して加算器212に入力される。振幅制御回路214は、振幅検出回路216の出力が一定値になるように、参照信号RSの振幅を増加又は減少する。これにより、駆動コイル102の結線部における参照信号RSの周波数成分の振幅を略一定に維持している。加算器212は、振幅制御回路214の出力と駆動信号DSとを加算する。加算された信号は、電圧−電流変換回路215へ入力される。電圧−電流変換回路215は、入力信号に比例した電流を駆動コイル102に印加する。駆動信号DSの周波数帯域に着目すると、駆動信号DSに比例した電流が駆動コイル102に印加されることになる。
【0047】
以上説明した本変形例の構成により、駆動コイル102へ印加する電流を制御しつつ、静電容量センサ230a、230bに印加される参照信号RSの電圧振幅を一定に保つことができる。この結果、ミラー101の回転角の制御性を維持し、かつ精度の良くミラー101の回転角の検出を行うことができる。
【0048】
(第二の変形例)
本実施例の第二の変形例について説明する。本変形例では、静電容量検出回路240a、240bの出力が参照信号RSの電圧振幅に比例している点を考慮している。具体的には、静電容量検出回路240a、240bの出力信号を、静電容量センサ230a、230bに印加される参照信号RSの電圧振幅で除算する。これにより、安定した容量検出を行うように構成した回路を用いている。
【0049】
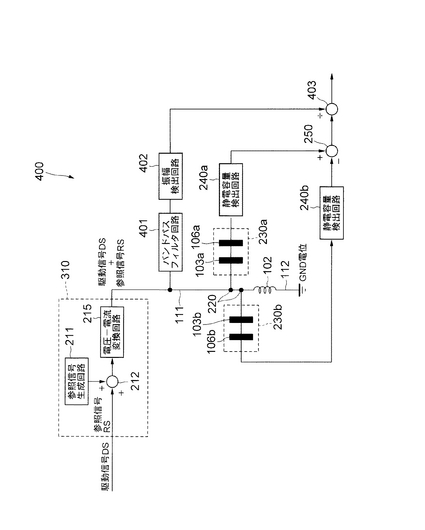
図8は、本変形例の回路400の概略構成を示す。加算器212は、駆動信号DSと参照信号RSとの加算を行う。電圧−電流変換回路215は、加算器212の出力に比例した電流を駆動コイル102へ印加する。バンドパスフィルタ回路401は、第一の配線111における電圧信号のうち、参照信号RSの周波数成分のみを検出する。振幅検出回路402は、バンドパスフィルタ回路401の出力信号の振幅値を出力する。このため、第一の配線111における参照信号RSの周波数成分の電圧振幅を検出できる。また、減算器250は、容量検出回路230aと容量検出回路230bとの出力を減算する。そして、減算器250の出力を、振幅検出回路402の出力で除算する。これにより、駆動コイル102の抵抗値の変化の影響を受けることなく角度を検出することができる。
【0050】
以上説明した本変形例の構成により、駆動コイル102へ印加する電流を制御しつつ、静電容量センサ230a、230bに印加される参照信号RSの電圧振幅を一定に保つことができる。この結果、ミラー101の回転角の制御性を維持し、かつ精度の良くミラー101の回転角の検出を行うことができる。
【実施例2】
【0051】
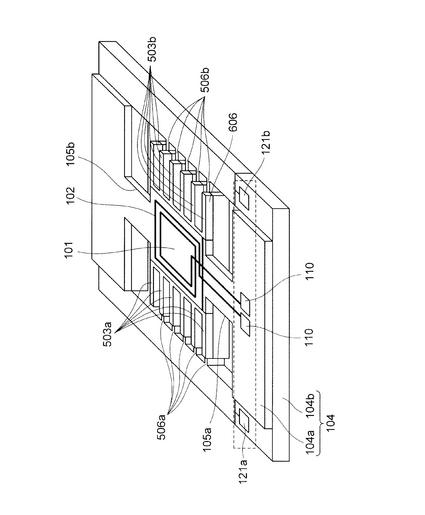
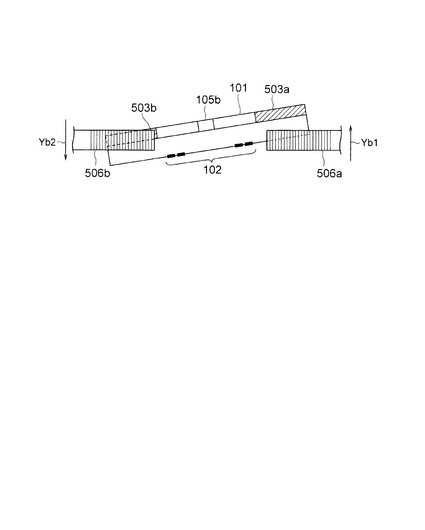
図9は、本発明の実施例2に係る偏向器500の概略構成を示す。上記実施例1と同一の部分には同一の符号を付し、重複する説明は省略する。ミラー101の対向する2つの側面に、それぞれ可動部櫛歯電極503aと可動部櫛歯電極503bが形成されている。可動部櫛歯電極503a、503bは、それぞれ櫛歯状の周期構造を有している。可動部櫛歯電極503aは、後述する固定部櫛歯電極506aと対向する位置に設けられている。可動部櫛歯電極503aと固定部櫛歯電極506aとで静電容量センサ230a(図13参照)を構成する。また、可動部櫛歯電極503bは、後述する固定部櫛歯電極506bと対向する位置に形成されている。可動部櫛歯電極503bと固定部櫛歯電極506bとで静電容量センサ230b(図13参照)を構成する。可動部櫛歯電極503a、503bは、第一の電極に対応する。固定部櫛歯電極506a、506bは、第二の電極に対応する。
【0052】
図10は、これら櫛歯電極近傍の構成の詳細を示す。支持体104は、支持体104bと、その上に積層された支持体104aとから構成されている。支持体104aには、トーションバー105a、106bが設けられている。可動部櫛歯電極503a、503bは、活性層606の部分に対応する。活性層606の部分は、イオン注入などによりドーピングが行なわれており、表面部分の電気抵抗が下げられている。
【0053】
また、支持体104bの上には、図示されていないが、シリコン酸化膜等の絶縁膜が形成されている。絶縁膜の上には、アルミ等の低抵抗薄膜を形成しパターニングすることにより配線や電極部121a、121bが形成されている。支持体104bを延長した部分に、固定部櫛歯電極506a、506bが形成されている。固定部櫛歯電極506a、506bは、櫛歯状の周期構造を有している。可動部櫛歯電極503a、503bと、固定部櫛歯電極506a、506bとは、櫛歯電極を用いたことにより、ミラー101の回転角変化に対する静電容量変化量が大きくなる。この結果、高精度の角度検出が可能になる。なお、可動部櫛歯電極503a、503bは、可動板に形成した櫛歯に対応する。固定部櫛歯電極506a、506bは、固定端より延在して設置した櫛歯に対応する。
【0054】
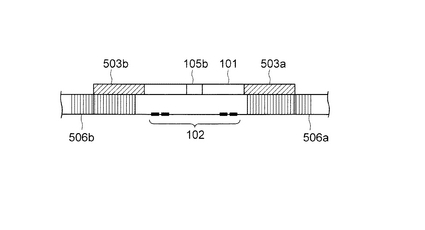
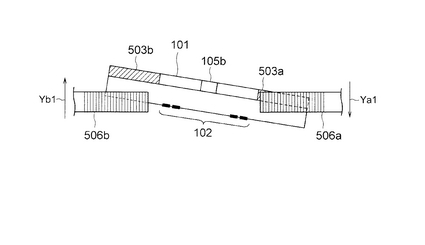
図11−1は、トーションバー105b側から見た櫛歯電極近傍の断面構成を示す。図11−1から明らかなように、可動部櫛歯電極503a、503bは、固定部櫛歯電極506a、506bに対して図中上方向に所定量だけオフセットした位置に形成されている。偏向器500のミラー101は、回転軸(不図示)の周りに、図11−2の矢印Ya1、Yb1で示す方向、または図11−3の矢印Ya2、Yb2で示す方向へ回転する。図12を用いてミラー101の回転角と静電容量センサ230a、230bの容量変化の関係について説明する。
【0055】
偏向器500のミラー101が、支持体104aに対して略平行な状態ではミラー101の回転角は0度、または0度近傍である。この状態では、可動部櫛歯電極503aと固定部櫛歯電極506a、及び可動部櫛歯電極503bと固定部櫛歯電極506bとがそれぞれ対向している電極部分の面積は略0である。換言すると、図11−1に示すように、回転軸(不図示)に平行な方向から見たとき、可動部櫛歯電極503aと固定部櫛歯電極506a、及び可動部櫛歯電極503bと固定部櫛歯電極506bは、それぞれ全く重なり合う部分が存在しない。このため、可動部櫛歯電極503aと固定部櫛歯電極506aとの間の静電容量、及び可動部櫛歯電極503bと固定部櫛歯電極506bとの間の静電容量は共に略0である。
【0056】
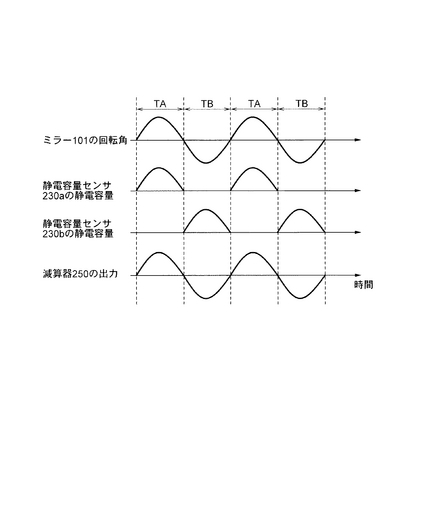
ミラー101が図11−2において矢印Ya1、Yb1で示す向きへ回転し、再び平行状態へ戻るまでを時間期間TAとする。ミラー101が、矢印Ya1、Yb1で示す右周りに最大の回転角に達したとき、可動部櫛歯電極503aと固定部櫛歯電極506aとの対向している部分の面積は最大になる。これにより、可動部櫛歯電極503aと固定部櫛歯電極506aとからなる静電容量センサ230aの静電容量は最大になる。これに対して、可動部櫛歯電極503bと固定部櫛歯電極506bとは、ミラー101の回転角が略0の状態に比較して離れた位置関係にある。このため、可動部櫛歯電極503bと固定部櫛歯電極506bとからなる静電容量センサ230bの静電容量は略0のままの状態となる。
【0057】
また、ミラー101が図11−3において矢印Ya2、Yb2で示す向きへ回転し、再び平行状態へ戻るまでを時間期間TBとする。ミラー101が、矢印Ya2、Yb2で示す左周りに最大の回転角に達したとき、可動部櫛歯電極503bと固定部櫛歯電極506bとの対向している部分の面積は最大になる。これにより、静電容量センサ230bの静電容量が最大になる。これに対して、可動部櫛歯電極503aと固定部櫛歯電極506aとは、ミラー101の回転角が略0の状態に比較して離れた位置関係にある。このため、静電容量センサ230aの静電容量は略0のままの状態となる。
【0058】
このように、ミラー101の回転角の正負(回転方向)に応じて、静電容量センサ230aと静電容量センサ230bとのいずれか一方に静電容量の変化が発生し、他方には発生しない。このため、後述する静電容量を検出する回路である静電容量検出回路640a、640bの出力信号もどちらか一方にしか現れない。具体的には、ミラー101が矢印Ya1、Yb1で示す右周りに回転したとき(図11−2)、静電容量検出回路640aに出力信号が現れ、静電容量検出回路640bには出力信号が現れない。これに対して、ミラー101が矢印Ya2、Yb2で示す左回りに回転したとき(図11−3)、静電容量検出回路640aには出力信号が現れず、静電容量検出回路640bに出力信号が現れる。減算器250の出力信号は、静電容量検出回路640aの出力信号から静電容量検出回路640bの出力信号を減算処理したものである。減算結果は、ミラー101の回転角に比例した値であり、回転角と同位相で変化する。従って、減算器250の出力信号から、ミラー101の回転角と回転方向を知ることができる。
【0059】
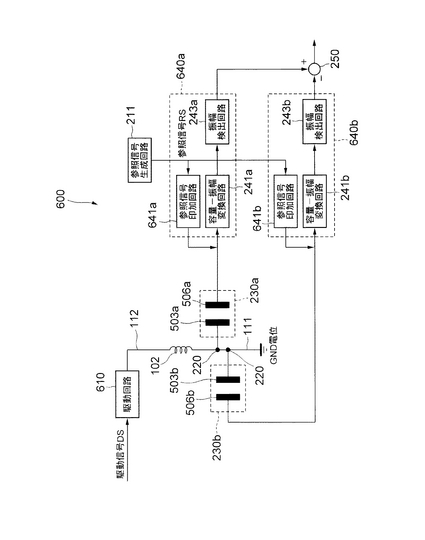
図13は、静電容量を検出する回路600の概略構成を示す。本実施例では、可動部櫛歯電極503a、可動部櫛歯電極503bは、ミラー101の裏面において駆動コイル102の第一端と接続部220において第一の配線111に接続されている。第一の配線111は、トーションバー105aを経由してミラー101の外へ取り出される。取り出された配線は、偏向器500の外部に設置された容量検出回路の基準電位、例えばGND(グランド)電位に接続されている。また、駆動コイル102の第二端は、第二の配線112に接続されている。第二の配線112は、偏向器500の外部に設置された駆動回路610へ接続されている。
【0060】
固定部櫛歯電極506aは、参照信号印加回路641aと容量−振幅変換回路241aに接続されている。固定部櫛歯電極506bは、参照信号印加回路641bと容量−振幅変換回路241bに接続されている。容量検出のため、参照信号印加回路641a、641bは、それぞれ固定部櫛歯電極506a、506bに参照信号を印加する。容量−振幅変換回路241a、241bは、それぞれ各固定部櫛歯電極506a、506bに流れる電流を検出する。そして、容量−振幅変換回路241a、241bは、静電容量センサ230a、230bの容量値を、検出される信号の振幅として出力する。振幅検出回路243a、243bは、それぞれ容量−振幅変換回路241a、241bの出力信号の振幅を検出する回路である。このため、容量−振幅変換回路241a、241bは、静電容量センサ230a、230bの容量値に相当した信号を出力する。
【0061】
上述したように、静電容量センサ230aと静電容量センサ230bの容量変化は相補的に現れる。このため、静電容量センサ230aに接続された静電容量検出回路640aと、静電容量センサ230bに接続された静電容量検出回路640bとの出力の差を、減算器250で導出することで、ミラー101の回転角を求めることができる。本構成では、駆動用の駆動信号DSと検出用の参照信号RSとを、個別に印加することができる。この結果簡易な回路で角度信号を得ることができる。
【0062】
ここで、実施例1と同様に参照信号RSの周波数を駆動帯域より離れた周波数帯域に設定している。さらに好ましくは、参照信号RSの周波数を駆動帯域の最大値より所定倍だけ高い周波数、例えば、10倍以上に設定することが望ましい。これにより、駆動信号DSの影響を低減し、精度の良い回転角検出を行うことができる。
【0063】
本実施例の構成では、実施例1の構成と同様に、トーションバー105a上には第一の配線111と第二の配線112との2本の配線のみが配置されている。これにより、単純に配線を引き出した構成(図6−3)に比較して、トーションバー105aの幅を細くできる。この結果、トーションバー105a、105bの設計の自由度が高くなる。
【0064】
なお、実施例1で説明した図7における静電容量検出回路240a、240b、駆動回路310は、実施例2で説明した図10における駆動回路610、静電容量検出回路640a、静電容量検出回路640b、参照信号生成回路211に対応する。そして、実施例1に対して、実施例2で説明した回路構成を適用すること、または実施例2に対して、実施例1で説明した回路構成を適用することもできる。このように、本発明は、その趣旨を逸脱しない範囲で、様々な変形例をとることができる。
【産業上の利用可能性】
【0065】
以上のように、本発明に偏向器は、可動板の角度検出手段を備える偏向器に適している。
【図面の簡単な説明】
【0066】
【図1】実施例1の偏向器の概略構成を示す図である。
【図2】実施例1の偏向器の断面構成を示す図である。
【図3−1】実施例1における可動板の動きを示す図である。
【図3−2】実施例1における可動板の動きを示す他の図である。
【図4】実施例1の静電容量センサの出力変化の様子を示す図である。
【図5】実施例1の回路構成を示す図である。
【図6−1】実施例1のトーションバー上の配線構成を示す図である。
【図6−2】実施例1のトーションバー上の配線構成を示す他の図である。
【図6−3】単純に引き出したときのトーションバー上の配線構成を示す図である。
【図7】実施例1の第一の変形例の回路構成を示す図である。
【図8】実施例1の第二の変形例の回路構成を示す図である。
【図9】実施例2の偏向器の概略構成を示す図である。
【図10】実施例2の櫛歯電極近傍の構成を拡大して示す図である。
【図11−1】実施例2における可動板の動きを示す図である。
【図11−2】実施例2における可動板の動きを示す他の図である。
【図11−3】実施例2における可動板の動きを示すさらに他の図である。
【図12】実施例2の静電容量センサの出力変化の様子を示す図である。
【図13】実施例2の回路構成を示す図である。
【図14】従来のミラーの角度検出の構成を示す図である。
【符号の説明】
【0067】
100 偏向器
101 ミラー
102 駆動コイル
103a、103b 可動部電極
104、104a、104b 支持体
105a、105b トーションバー
106a、106b 固定部電極
107 ベースフレーム
108a、108b 永久磁石
109 ヨーク
110 電極部
111 第一の配線
112 第二の配線
121a、121b 電極部
200 静電容量検出回路・駆動回路
211 参照信号生成回路
212 加算器
214 振幅制御回路
215 電圧−電流変換回路
216 振幅検出回路
217 バンドパスフィルタ回路
220 接続部
230a、230b 静電容量センサ
240a、240b 静電容量検出回路
241a、241b 容量−振幅変換回路
242a、242b バンドパスフィルタ回路
243a、243b 振幅検出回路
250 減算器
310 駆動回路
400 回路
401 バンドパスフィルタ回路
402 振幅検出回路
403 除算器
500 偏向器
503a、503b 可動部櫛歯電極
506a、506b 固定部櫛歯電極
600 静電容量検出回路・駆動回路
606 活性層
610 駆動回路
640a、640b 静電容量検出回路
641a、641b 参照信号印加回路
DS 駆動信号
RS 参照信号
AX 回転軸
11 軸
12 ミラー
16A、16B、17A、17B 電極
C1、C2 コンデンサ
【技術分野】
【0001】
本発明は、偏向器に関し、特に電磁力を用いた偏向器に関する。
【背景技術】
【0002】
偏向器のミラーの変位角を検出する構成として、例えば、特許文献1に開示された構成が知られている。図14は、特許文献1に開示された構成を示す。本構成では、静電容量式の変位角検出方法を用いている。ミラー12の裏面側に、軸11に対して対称な位置に電極16A、17Aを設ける。ガラス基板14側に電極16A、17Aと対をなす電極16B、17Bを設ける。これにより、コンデンサC1、C2を構成する。そして、ミラー12の角度変位を伴う両コンデンサC1、C2の容量差に基づいてミラー12の変位角を検出する。
【0003】
【特許文献1】特開平7−218857号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示された構成では、ミラー12の角度を検出する静電容量の片側の電極16A、17Aが可動板であるミラー12上に存在する。これにより、静電容量を検出するために、電極16A、17Aに接続された配線を、可動板を支持するトーションバー上を経由して偏向器外へ引き出す必要がある。このため、トーションバー上に配線を形成しなければならない。この結果、偏向器を設計する自由度が低下してしまうという問題がある。
【0005】
本発明は、上記に鑑みてなされたものであって、十分な設計自由度を得ることができ、かつ可動板の変位角度を正確に検出できる偏向器を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明によれば、可動板と、固定部と、固定部に対して可動板を揺動可能に支持する一対の弾性部材と、可動板に設けられた駆動コイルと、駆動コイルに作用する磁束を生成する磁束発生手段と、可動板の揺動角を電気特性の変化として出力する角度検出手段と、駆動コイルの二端のうち第一端と角度検出手段の電気端子の一端とを可動板上で電気的に接続する接続部と、接続部から弾性部材を通して固定部へ至る第一の配線と、を有することを特徴とする偏向器を提供できる。
【0007】
また、本発明の好ましい態様によれば、角度検出手段は、可動板上の第一の電極と、第一の電極に対向して設けられた第二の電極との間の静電容量に基づいて可動板の揺動角を検出し、接続部は第一の電極と駆動コイルの第一端を接続することが望ましい。
【0008】
また、本発明の好ましい態様によれば、固定部に形成した第二の電極に接続されており、第一の電極と第二の電極との間の静電容量を検出する静電容量検出回路と、静電容量検出回路の動作に必要な参照信号を生成する参照信号生成回路と、駆動コイルの駆動指令信号と参照信号を足し合わせる加算器と、加算器の出力を増幅し駆動コイルに供給する増幅器とを備え、増幅器の出力は、第一の配線と固定部側で接続されていることが望ましい。
【0009】
また、本発明の好ましい態様によれば、固定部に形成した第二の電極に接続されており、第一の電極と第二の電極との間の静電容量を検出する静電容量検出回路と、静電容量検出回路の動作に必要な参照信号を生成し第二の電極に供給する参照信号生成回路と、駆動コイルの駆動指令信号を増幅する増幅器と、駆動コイルの第二端に可動板上で電気的に接続され、接続部から弾性部材を通して固定部へ至る第二の配線と、を備え、増幅器の出力は第二の配線と固定部側で接続されており、第一の配線は固定電位へ接続されていることが望ましい。
【0010】
また、本発明の好ましい態様によれば、参照信号生成回路は、偏向器の駆動周波数帯域より離れた周波数の参照信号を生成することが望ましい。
【0011】
また、本発明の好ましい態様によれば、参照信号生成回路は、駆動周波数帯域の最大値に対して所定倍だけ高い帯域の周波数の参照信号を生成することが望ましい。
【0012】
また、本発明の好ましい態様によれば、増幅器は、駆動コイルへの電流が駆動指令信号に比例するように制御を行う電流増幅回路より構成されており、参照信号生成回路は、第一の電極における電圧の参照信号の周波数成分が一定振幅になるように振幅制御を行う振幅制御手段を有することが望ましい。
【0013】
また、本発明の好ましい態様によれば、増幅器は、駆動コイルへの電流が駆動指令信号に比例するように制御を行う電流増幅回路より構成されており、静電容量検出回路は、容量を検出した値を、第一の電極における電圧の参照信号の周波数成分の振幅で除算する除算器を備えていることが望ましい。
【0014】
また、本発明の好ましい態様によれば、第一の電極は可動板の端面に形成した櫛歯であり、第二の電極は可動板の端面の櫛歯と対向した固定端より延在して設置した櫛歯であることが望ましい。
【0015】
また、本発明の好ましい態様によれば、第一の電極は可動板の回転軸に対して対称に可動板上へ形成した複数の電極であり、第二の電極は可動板上の複数の電極と対向している複数の電極であり、可動板上の電極と可動板上の電極に対向した電極との容量において、対称に配置した容量の差を角度とすることが望ましい。
【発明の効果】
【0016】
本発明では、可動板は、一対の弾性部材により固体部に対して揺動可能に支持されている。可動板には駆動コイルが設けられている。磁束発生手段は、駆動コイルに作用する磁束を生成する。また、角度検出手段は、可動板の揺動角を電気特性の変化として出力する。そして、接続部は、駆動コイルの二端のうち第一端と角度検出手段の電気端子の一端とを可動板上で電気的に接続している。また、第一の配線は、接続部から弾性部材を通して固定部へ至っている。この構成では、弾性部材上には、少なくとも第一の配線が形成されていれば良い。このため、十分な設計自由度を得ることができる。また、角度検出手段は、可動板の揺動角を電気特性の変化として検出する。このため、可動板の変位角度を正確に検出できる。この結果、十分な設計自由度を得ることができ、かつ可動板の変位角度を正確に検出できる偏向器を提供することができる。
【発明を実施するための最良の形態】
【0017】
以下に、本発明に偏向器の実施例を図面に基づいて詳細に説明する。なお、この実施例により、この発明が限定されるものではない。
【実施例1】
【0018】
図1は、本発明の実施例1に係る偏向器100の概略構成を示す。偏向器100は、マイクロマシン技術を用いて製造されている。ミラー101は、略矩形形状を有し、空間磁束中に配置されている。ミラー101の表面側には反射面が形成されている。また、ミラー101の裏面側には、駆動コイル102と可動部電極103aと可動部電極103bとが形成されている。ここで、表面とは、図1において上側の見えている面をいう。裏面とは、図1において下側の見えていない面をいう。ミラー101は、可動板に対応する。可動部電極103aと可動部電極103bとは、ミラー101の略矩形形状の対向する二つの辺近傍に形成されている。
【0019】
また、支持体104、トーションバー105a、105b、ミラー101、駆動コイル102は、それぞれシリコンマイクロマシニングの技術を用いてシリコンウエハ上に一体的に形成されている。その後、シリコンウエハを切断、固定部電極106aと固定部電極106bとを形成したベースフレーム107に接着する。そして、永久磁石108a、108bとヨーク109からなる部材と組み合わせることにより完成する。永久磁石108a、108bとヨーク109は、磁束発生手段に対応する。支持体104、ベースフレーム107は、固定部に対応する。
【0020】
支持体104上に形成された電極部(電極パッド)110から駆動コイル102に電流を印加すると、永久磁石108a、108bにより発生する磁束と駆動コイル102に流れる電流との相互関係によりローレンツ力が働く。ミラー101は、2つのトーションバー105a、105bを介して支持体104に接続されている。トーションバー105a、105bは、弾性部材に対応する。ローレンツ力が働くことにより、トーションバー105a、105bを通る回転軸を中心にミラー101が回転する。電流の向きが逆になると、ローレンツ力が働く方向が逆になる。このとき、ミラー101はトーションバー105a、105bを通る回転軸を中心に反対方向に回転する。ミラー101の反射面に、光源(不図示)からレーザー光を照射する。そして、駆動コイル102に電流を印加する。これにより、ミラー101は揺動する。ミラー101の回転角に対応して、レーザー光の反射光は、ミラー101で偏向される。ミラー101の回転角は電流値により定まる。ミラー101の回転角と電流値との関係は、非線形であり、かつ経時変化する。このため、ミラー101を正確な角度に変位(偏向)させたいときは、ミラー101の回転角を検出する手段を用いて、検出した回転角が目標角になるように駆動電流を制御する。
【0021】
ここで、「揺動」とは、所定の一本の仮想的な軸の周りの繰り返し往復運動をいう。しかしながら、これに限られるものではなく、所定の一本の仮想的な軸の周りの単なる傾斜も含むものをいう。例えば、可動板が揺動するとは、可動板が一本の軸の周りに傾斜すること、及び繰り返し振動することを意味する。また、ミラー101の回転角とは、ミラー101が揺動するときの角度(揺動角)をいう。
【0022】
本実施形態の偏向器100は、静電容量を用いた角度検出手段(角度センサ)を備えている。可動部電極103aと固定部電極106aとは、それぞれ対向するように配置されている。同様に、可動部電極103bと固定部電極106bとは、それぞれ対向するように配置されている。可動部電極103a、103bは、第一の電極に対応する。固定部電極106a、106bは、第二の電極に対応する。電極間の静電容量はミラー101の回転角に応じて増減する。このため、この静電容量値を用いてミラー101の回転角を検出する事ができる。ここで、可動部電極103aと固定部電極106aとにより静電容量センサ230a(図5参照)を構成する。可動部電極103bと固定部電極106bとにより静電容量センサ230b(図5参照)を構成する。静電容量センサ230a、230bは、角度検出手段に対応する。静電容量センサ230aと静電容量センサ230bとは、ミラー101の回転軸に対して対称に配置されている。このため、容量センサ230a、230bの容量変化は相補的に現れる。なお、静電容量センサ230aと静電容量センサ230bとは、複数の電極に対応する。
【0023】
図2は、偏向器100の断面構成を示す。上述したように、ミラー101の裏面側には、駆動コイル102が形成されている。また、ミラー101の対向する位置には、可動部電極103a、103bが設けられている。可動部電極103a、103bに対向する位置に、それぞれ固定部電極106a、106bが形成されている。さらに、ミラー101の外側に一対の永久磁石108a、108bが設けられている。永久磁石108a、108bは、ヨーク109に支持されている。ヨーク109は、磁性材料で構成されている。
【0024】
図3−1、図3−2は、それぞれミラー101の回転方向を示す図である。偏向器100のミラー101は、回転軸AXの周りに、図3−1の矢印Ya1、Yb1で示す方向、または図3−2の矢印Ya2、Yb2で示す方向へ回転する。図4を用いてミラー101の回転角と容量センサ230a、230bの容量変化の関係について説明する。
【0025】
偏向器100のミラー101が、支持体104に対して略平行である平行状態から、図3−1の矢印Ya1、Yb1で示す向きへ回転し、再び平行状態へ戻るまでを時間期間TAとする。このとき、可動部電極103aと固定部電極106aとは接近する。これにより、静電容量センサ230aの静電容量は増加する。また、可動部電極103bと固定部電極106bとは離れる。これにより、静電容量センサ230bの静電容量は減少する。ミラー101が矢印Ya1、Yb1で示す向きの最大回転角に達したとき、可動部電極103aと固定部電極106aの距離は最も接近する。このため、静電容量センサ230aの静電容量は最大となる。このとき、可動部電極103bと固定部電極106bとの距離は最も離れる。このため、静電容量センサ230bの静電容量は最小となる。
【0026】
これに対して、ミラー101が平行状態から、図3−2の矢印Ya2、Yb2で示す向きへ回転し、再び平行状態へ戻るまでを時間期間TBとする。このとき、可動部電極103aと固定部電極106aとは離れる。これにより、静電容量センサ230aの静電容量は減少する。また、可動部電極103bと固定部電極106bとは接近する。これにより、静電容量センサ230bの静電容量は、増加する。ミラー101が矢印Ya2、Yb2で示す向きの最大回転角に達したとき、可動部電極103aと固定部電極106aの距離は最も離れる。このため、静電容量センサ230aの静電容量は最小となる。可動部電極103bと固定部電極106bとの距離は最も接近する。このため、静電容量センサ230bの静電容量は最大となる。静電容量センサ230a、230bは、このように、角度検出手段に対応する。角度検出手段、即ち角度センサは、静電容量を用いているので簡単な構成とすることができる。
【0027】
次に、静電容量センサ230a、230bとミラー101の回転角を検出する回路200について説明する。図5は、回路200の概略構成を示す。可動部電極103aと可動部電極103bとは、ミラー101の裏面において駆動コイル102の第一端と第一の配線111と接続部220で接続されている。第一の配線111は、トーションバー105a上を経由してミラー101の外へ取り出される。取り出された第一の配線111は、偏向器100の外部に設置された駆動回路210へ接続されている。駆動コイル102の第二端は、第二の配線112と接続されている。第二の配線112は、トーションバー105aを経由して、偏向器100の外部に設置された静電容量検出回路の基準電位、例えばGND電位に接続されている。基準電位は、固定電位に対応する。
【0028】
駆動回路210の加算器212は、駆動信号DSと参照信号生成回路211で生成された参照信号RSとを加算する。加算された信号は、増幅回路213で増幅される。増幅回路213は、増幅器に対応する。第一の配線111には、ミラー101を回転させるための駆動信号DSと容量−振幅変換回路241a、241bを動作させるための参照信号RSを加算した信号を印加する。可動部電極103a、103bは、駆動回路210から遠く、かつ至近に存在する駆動コイル102により静電容量検出回路の基準電位に終端される。これにより、対ノイズ性が高く、品質の高い容量検出を行うことができる。
【0029】
静電容量検出回路240aは、静電容量センサ230aの固定部電極106aに接続されている。静電容量検出回路240bは、静電容量センサ230bの固定部電極106bに接続されている。
【0030】
静電容量検出回路240aは、容量−振幅変換回路241aと、バンドパスフィルタ回路242aと、振幅検出回路243aとから構成されている。また、静電容量検出回路240bは、容量−振幅変換回路241bと、バンドパスフィルタ回路242bと、振幅検出回路243bとから構成されている。後述するように、静電容量センサ230a、230bには、それぞれ参照信号RSが印加されている。容量−振幅変換回路241a、241bは、参照信号RSを印加したときに静電容量センサ230a、230bに流れる電流を検出する。そして、容量−振幅変換回路241a、241bは、静電容量センサ230a、230bの静電容量値に比例した振幅の信号を出力する。
【0031】
バンドパスフィルタ回路242a、242bは、それぞれ容量−振幅変換回路241a、241bの出力信号に対して参照信号RSの周波数成分のみを通過させる。これにより、バンドパスフィルタ回路242a、242bは、駆動信号DS由来の信号などの回転角検出に不要な信号を除去する。
【0032】
振幅検出回路243a、243bは、それぞれバンドパスフィルタ回路242a、242bの出力信号の振幅を検出する。そして、振幅検出回路243a、243bは、静電容量センサ230a、230bの容量値に相当した信号を出力する。上述したように、静電容量センサ230aと静電容量センサ230bとの静電容量変化は、相補的に現れる。そして、減算器250は、静電容量センサ230aに接続された静電容量検出回路240aと静電容量センサ230bに接続された静電容量検出回路240bとの出力の差を導出する。これにより、ミラー101の回転角を求めることができる。このように、容量差を用いることで容量検出時の同相ノイズの影響を低減できる。この結果、正確な角度検出が可能となる。
【0033】
静電容量センサ230aと静電容量センサ230bとには、参照信号RSと駆動信号DSとが加算された信号が印加されている。そして、容量−振幅検出回路241a、241bの出力を、参照信号RSの周波数帯域を通過させるバンドパスフィルタ回路242a、242bを通すことで、駆動信号DSの影響を除去できる。
【0034】
参照信号RSの周波数は、駆動周波数帯域より離れた値に設定されている。さらに好ましくは、参照信号RSの周波数は、駆動周波数帯域の最大値に対して所定倍だけ高い帯域の周波数に設定されていることが望ましい。例えば、所定倍として略10倍程度高い帯域を設定できる。これにより、例えば、バンドパスフィルタ回路242a、242bを一次、Q=1としたとき、容量検出における駆動信号DSの影響を略10分の一にまで低減することができる。このため、精度の良い回転角検出を行うことができる。また、参照信号RSを駆動周波数帯域よりも所定倍だけ高い周波数側に設定すると、直流成分を用いてミラー101を駆動できる。このため、さらに精度の良い回転角検出を行うことができる。
【0035】
また、駆動信号DSに注目すると、駆動コイル102にも駆動信号DSと参照信号RSとが加算された信号が印加されている。ここで、参照信号RSは、ミラー101の駆動周波数帯域の最大値に対して所定倍だけ離れた値、例えば10倍程度高い値である。このため、参照信号RSにより発生する揺動成分も、略10分の一にまで減少させることができる。この結果、安定してミラー101を駆動する事ができる。
【0036】
次に、トーションバー105a、105b上の電気的な配線について説明する。図6−1、図6−2は、それぞれ本実施例におけるトーションバー105a、105b上の配線の構成を示す。また、図6−3は、単純にすべての配線を引き出したときの配線の構成を示す。
【0037】
まず、図6−3に示すような単純にすべての配線を引き出したときの構成について説明する。駆動コイル102に結線される2本の配線と、可動部電極103a、可動部電極103bにそれぞれ結線される2本の配線との、合計4本の配線がトーションバー105a上に配置されている。製造上の制限から、配線の線幅及び線間の下限値は制限される。このため、トーションバー105aは、所定の幅以下には細くできなくなってしまう。トーションバー105a、105bの幅は、トーションバー105a、105bの弾性係数を決定するのに重要なパラメータである。このように、単純にすべての配線を引き出してしまうと、トーションバー105a、105bの幅を所定値以上にしなければならない。この結果、偏向器の設計の自由度に制約が生じてしまう。
【0038】
図6−1は、本実施例におけるトーションバー105a上の配線の構成を示す。ミラー101上で可動部電極103a、可動部電極103bが駆動コイル102の一端と結線されている。これにより、トーションバー105a上に配置される配線は、駆動コイル102に接続される2本の配線のみとなる。配線数が4本(図6−3)から2本へ減少したことで、図6−3に示す構成に比較して、トーションバー105aの幅を細くすることができる。このため、設計の自由度が高くなる。具体的には、トーションバー105aの幅を細くすることにより、トーションバー105aを高い柔軟性を有する構成にできる。この結果、より駆動感度の高い偏向器、及びより偏向角の大きな偏向器を実現できる。
【0039】
図6−1に示した構成では、駆動コイル102の2本の配線を片方のトーションバー105a上に形成している。しかしながら、これに限られず、図6−2に示すように、一対のトーションバー105a、105bに、各々1本ずつの配線を通す構成とすることもできる。図6−2で示す構成では、図6−1で示した構成に比較して、さらに設計の自由度を高めることができる。
【0040】
上述したように、トーションバー105a、105bの上の配線の数を、単純に引き出したときに比較して減らした構成により静電容量センサ230a、230bの容量を検出できる。この結果、角度検出手段を備えた偏向器100において、トーションバー105a、105bの設計の自由度を高めることができる。
【0041】
なお、本実施例では角度検出手段として、静電容量センサ230a、230bを用いる構成を用いている。しかしながら、これに限られるものではなく、角度検出手段は以下の(1)、(2)で説明する方式の構成とすることもできる。
(1)トーションバー105a、105bの歪みをインピーダンスで検出する方式
(2)ミラー101(可動板)上とベースフレーム107(固定部)上とに検出用コイルを設けて、これら2コイル間の相互誘導量を検出する方式
【0042】
上記(1)、(2)の構成としたときでも、ミラー101の裏面の接続部220において、駆動コイル102と角度検出手段との一端を接続する。これにより、トーションバー105a、105b上の配線を増やすことなく角度を検出できる。この結果、トーションバー105a、105bの設計の自由度を高めることができる。
【0043】
また、本実施例は、静電容量検出回路240a、240bを偏向器100の外に配置する構成である。しかしながら、これに限られず、静電容量検出回路240a、240bを支持体104やベースフレーム107上に形成又は配置する構成としたときでも同様の効果を得ることができる。さらに、本実施例では磁束を発生させる構成として永久磁石108a、108bとヨーク109を用いたが、電磁石とヨークを用いる構成でも良い。
【0044】
(第一の変形例)
次に、本実施例の第1の変形例について説明する。駆動信号DSは、制御性を考慮すると電流信号とすることが望ましい。例えば、上記実施例1の構成において、電流制御する場合を考える。まず、駆動信号DSと参照信号RSとを加算した信号を、電圧電流変換回路を介して電流信号に変換する。変換された電流信号を、駆動コイル102に印加する。ここで、静電容量センサ230a、230bに印加される参照信号RSの電圧振幅は、駆動コイル102の抵抗値により変化してしまう。このため、静電容量センサ230a、230bの容量が不変で一定のときでも、静電容量検出回路243a、243bの出力は、参照信号RSの電圧振幅に比例して増減してしまうことが考えられる。このように、実施例1の構成において単純に電流制御を行なうと、上述の不都合を生ずるおそれがある。以下の変形例は、このような点を考慮した回路構成を備えている。
【0045】
本変形例では、図7に示した回路を用いて、静電容量センサ230a、230bに印加される参照信号RSの電圧振幅を一定に保つように参照信号RSの電流振幅を制御する。図7における静電容量検出回路240a、240bは、上記実施例1と同一の構成である。即ち、静電容量検出回路240a、240bは、容量−振幅変換回路と、バンドパスフィルタ回路と、振幅検出回路とから構成されている。同一構成の重複する説明は省略する。
【0046】
本変形例の駆動回路310は、電圧−電流変換回路215を介して駆動信号DSと参照信号RSとを加算した信号に比例した電流信号を第一の配線111に印加する。電圧−電流変換回路215は、電流増幅回路に対応する。バンドパスフィルタ回路217は、第一の配線111における電圧信号のうち、参照信号RSの周波数成分のみを検出する。振幅検出回路216は、バンドパスフィルタ回路217の出力信号の振幅値を出力する。これにより、駆動コイル102の結線部における参照信号RSの周波数成分の電圧振幅を検出できる。振幅制御回路214と振幅検出回路216とバンドパスフィルタ回路217とは、振幅制御手段に対応する。参照信号生成回路211は、参照信号RSを生成する。生成された参照信号RSは、振幅制御回路214を介して加算器212に入力される。振幅制御回路214は、振幅検出回路216の出力が一定値になるように、参照信号RSの振幅を増加又は減少する。これにより、駆動コイル102の結線部における参照信号RSの周波数成分の振幅を略一定に維持している。加算器212は、振幅制御回路214の出力と駆動信号DSとを加算する。加算された信号は、電圧−電流変換回路215へ入力される。電圧−電流変換回路215は、入力信号に比例した電流を駆動コイル102に印加する。駆動信号DSの周波数帯域に着目すると、駆動信号DSに比例した電流が駆動コイル102に印加されることになる。
【0047】
以上説明した本変形例の構成により、駆動コイル102へ印加する電流を制御しつつ、静電容量センサ230a、230bに印加される参照信号RSの電圧振幅を一定に保つことができる。この結果、ミラー101の回転角の制御性を維持し、かつ精度の良くミラー101の回転角の検出を行うことができる。
【0048】
(第二の変形例)
本実施例の第二の変形例について説明する。本変形例では、静電容量検出回路240a、240bの出力が参照信号RSの電圧振幅に比例している点を考慮している。具体的には、静電容量検出回路240a、240bの出力信号を、静電容量センサ230a、230bに印加される参照信号RSの電圧振幅で除算する。これにより、安定した容量検出を行うように構成した回路を用いている。
【0049】
図8は、本変形例の回路400の概略構成を示す。加算器212は、駆動信号DSと参照信号RSとの加算を行う。電圧−電流変換回路215は、加算器212の出力に比例した電流を駆動コイル102へ印加する。バンドパスフィルタ回路401は、第一の配線111における電圧信号のうち、参照信号RSの周波数成分のみを検出する。振幅検出回路402は、バンドパスフィルタ回路401の出力信号の振幅値を出力する。このため、第一の配線111における参照信号RSの周波数成分の電圧振幅を検出できる。また、減算器250は、容量検出回路230aと容量検出回路230bとの出力を減算する。そして、減算器250の出力を、振幅検出回路402の出力で除算する。これにより、駆動コイル102の抵抗値の変化の影響を受けることなく角度を検出することができる。
【0050】
以上説明した本変形例の構成により、駆動コイル102へ印加する電流を制御しつつ、静電容量センサ230a、230bに印加される参照信号RSの電圧振幅を一定に保つことができる。この結果、ミラー101の回転角の制御性を維持し、かつ精度の良くミラー101の回転角の検出を行うことができる。
【実施例2】
【0051】
図9は、本発明の実施例2に係る偏向器500の概略構成を示す。上記実施例1と同一の部分には同一の符号を付し、重複する説明は省略する。ミラー101の対向する2つの側面に、それぞれ可動部櫛歯電極503aと可動部櫛歯電極503bが形成されている。可動部櫛歯電極503a、503bは、それぞれ櫛歯状の周期構造を有している。可動部櫛歯電極503aは、後述する固定部櫛歯電極506aと対向する位置に設けられている。可動部櫛歯電極503aと固定部櫛歯電極506aとで静電容量センサ230a(図13参照)を構成する。また、可動部櫛歯電極503bは、後述する固定部櫛歯電極506bと対向する位置に形成されている。可動部櫛歯電極503bと固定部櫛歯電極506bとで静電容量センサ230b(図13参照)を構成する。可動部櫛歯電極503a、503bは、第一の電極に対応する。固定部櫛歯電極506a、506bは、第二の電極に対応する。
【0052】
図10は、これら櫛歯電極近傍の構成の詳細を示す。支持体104は、支持体104bと、その上に積層された支持体104aとから構成されている。支持体104aには、トーションバー105a、106bが設けられている。可動部櫛歯電極503a、503bは、活性層606の部分に対応する。活性層606の部分は、イオン注入などによりドーピングが行なわれており、表面部分の電気抵抗が下げられている。
【0053】
また、支持体104bの上には、図示されていないが、シリコン酸化膜等の絶縁膜が形成されている。絶縁膜の上には、アルミ等の低抵抗薄膜を形成しパターニングすることにより配線や電極部121a、121bが形成されている。支持体104bを延長した部分に、固定部櫛歯電極506a、506bが形成されている。固定部櫛歯電極506a、506bは、櫛歯状の周期構造を有している。可動部櫛歯電極503a、503bと、固定部櫛歯電極506a、506bとは、櫛歯電極を用いたことにより、ミラー101の回転角変化に対する静電容量変化量が大きくなる。この結果、高精度の角度検出が可能になる。なお、可動部櫛歯電極503a、503bは、可動板に形成した櫛歯に対応する。固定部櫛歯電極506a、506bは、固定端より延在して設置した櫛歯に対応する。
【0054】
図11−1は、トーションバー105b側から見た櫛歯電極近傍の断面構成を示す。図11−1から明らかなように、可動部櫛歯電極503a、503bは、固定部櫛歯電極506a、506bに対して図中上方向に所定量だけオフセットした位置に形成されている。偏向器500のミラー101は、回転軸(不図示)の周りに、図11−2の矢印Ya1、Yb1で示す方向、または図11−3の矢印Ya2、Yb2で示す方向へ回転する。図12を用いてミラー101の回転角と静電容量センサ230a、230bの容量変化の関係について説明する。
【0055】
偏向器500のミラー101が、支持体104aに対して略平行な状態ではミラー101の回転角は0度、または0度近傍である。この状態では、可動部櫛歯電極503aと固定部櫛歯電極506a、及び可動部櫛歯電極503bと固定部櫛歯電極506bとがそれぞれ対向している電極部分の面積は略0である。換言すると、図11−1に示すように、回転軸(不図示)に平行な方向から見たとき、可動部櫛歯電極503aと固定部櫛歯電極506a、及び可動部櫛歯電極503bと固定部櫛歯電極506bは、それぞれ全く重なり合う部分が存在しない。このため、可動部櫛歯電極503aと固定部櫛歯電極506aとの間の静電容量、及び可動部櫛歯電極503bと固定部櫛歯電極506bとの間の静電容量は共に略0である。
【0056】
ミラー101が図11−2において矢印Ya1、Yb1で示す向きへ回転し、再び平行状態へ戻るまでを時間期間TAとする。ミラー101が、矢印Ya1、Yb1で示す右周りに最大の回転角に達したとき、可動部櫛歯電極503aと固定部櫛歯電極506aとの対向している部分の面積は最大になる。これにより、可動部櫛歯電極503aと固定部櫛歯電極506aとからなる静電容量センサ230aの静電容量は最大になる。これに対して、可動部櫛歯電極503bと固定部櫛歯電極506bとは、ミラー101の回転角が略0の状態に比較して離れた位置関係にある。このため、可動部櫛歯電極503bと固定部櫛歯電極506bとからなる静電容量センサ230bの静電容量は略0のままの状態となる。
【0057】
また、ミラー101が図11−3において矢印Ya2、Yb2で示す向きへ回転し、再び平行状態へ戻るまでを時間期間TBとする。ミラー101が、矢印Ya2、Yb2で示す左周りに最大の回転角に達したとき、可動部櫛歯電極503bと固定部櫛歯電極506bとの対向している部分の面積は最大になる。これにより、静電容量センサ230bの静電容量が最大になる。これに対して、可動部櫛歯電極503aと固定部櫛歯電極506aとは、ミラー101の回転角が略0の状態に比較して離れた位置関係にある。このため、静電容量センサ230aの静電容量は略0のままの状態となる。
【0058】
このように、ミラー101の回転角の正負(回転方向)に応じて、静電容量センサ230aと静電容量センサ230bとのいずれか一方に静電容量の変化が発生し、他方には発生しない。このため、後述する静電容量を検出する回路である静電容量検出回路640a、640bの出力信号もどちらか一方にしか現れない。具体的には、ミラー101が矢印Ya1、Yb1で示す右周りに回転したとき(図11−2)、静電容量検出回路640aに出力信号が現れ、静電容量検出回路640bには出力信号が現れない。これに対して、ミラー101が矢印Ya2、Yb2で示す左回りに回転したとき(図11−3)、静電容量検出回路640aには出力信号が現れず、静電容量検出回路640bに出力信号が現れる。減算器250の出力信号は、静電容量検出回路640aの出力信号から静電容量検出回路640bの出力信号を減算処理したものである。減算結果は、ミラー101の回転角に比例した値であり、回転角と同位相で変化する。従って、減算器250の出力信号から、ミラー101の回転角と回転方向を知ることができる。
【0059】
図13は、静電容量を検出する回路600の概略構成を示す。本実施例では、可動部櫛歯電極503a、可動部櫛歯電極503bは、ミラー101の裏面において駆動コイル102の第一端と接続部220において第一の配線111に接続されている。第一の配線111は、トーションバー105aを経由してミラー101の外へ取り出される。取り出された配線は、偏向器500の外部に設置された容量検出回路の基準電位、例えばGND(グランド)電位に接続されている。また、駆動コイル102の第二端は、第二の配線112に接続されている。第二の配線112は、偏向器500の外部に設置された駆動回路610へ接続されている。
【0060】
固定部櫛歯電極506aは、参照信号印加回路641aと容量−振幅変換回路241aに接続されている。固定部櫛歯電極506bは、参照信号印加回路641bと容量−振幅変換回路241bに接続されている。容量検出のため、参照信号印加回路641a、641bは、それぞれ固定部櫛歯電極506a、506bに参照信号を印加する。容量−振幅変換回路241a、241bは、それぞれ各固定部櫛歯電極506a、506bに流れる電流を検出する。そして、容量−振幅変換回路241a、241bは、静電容量センサ230a、230bの容量値を、検出される信号の振幅として出力する。振幅検出回路243a、243bは、それぞれ容量−振幅変換回路241a、241bの出力信号の振幅を検出する回路である。このため、容量−振幅変換回路241a、241bは、静電容量センサ230a、230bの容量値に相当した信号を出力する。
【0061】
上述したように、静電容量センサ230aと静電容量センサ230bの容量変化は相補的に現れる。このため、静電容量センサ230aに接続された静電容量検出回路640aと、静電容量センサ230bに接続された静電容量検出回路640bとの出力の差を、減算器250で導出することで、ミラー101の回転角を求めることができる。本構成では、駆動用の駆動信号DSと検出用の参照信号RSとを、個別に印加することができる。この結果簡易な回路で角度信号を得ることができる。
【0062】
ここで、実施例1と同様に参照信号RSの周波数を駆動帯域より離れた周波数帯域に設定している。さらに好ましくは、参照信号RSの周波数を駆動帯域の最大値より所定倍だけ高い周波数、例えば、10倍以上に設定することが望ましい。これにより、駆動信号DSの影響を低減し、精度の良い回転角検出を行うことができる。
【0063】
本実施例の構成では、実施例1の構成と同様に、トーションバー105a上には第一の配線111と第二の配線112との2本の配線のみが配置されている。これにより、単純に配線を引き出した構成(図6−3)に比較して、トーションバー105aの幅を細くできる。この結果、トーションバー105a、105bの設計の自由度が高くなる。
【0064】
なお、実施例1で説明した図7における静電容量検出回路240a、240b、駆動回路310は、実施例2で説明した図10における駆動回路610、静電容量検出回路640a、静電容量検出回路640b、参照信号生成回路211に対応する。そして、実施例1に対して、実施例2で説明した回路構成を適用すること、または実施例2に対して、実施例1で説明した回路構成を適用することもできる。このように、本発明は、その趣旨を逸脱しない範囲で、様々な変形例をとることができる。
【産業上の利用可能性】
【0065】
以上のように、本発明に偏向器は、可動板の角度検出手段を備える偏向器に適している。
【図面の簡単な説明】
【0066】
【図1】実施例1の偏向器の概略構成を示す図である。
【図2】実施例1の偏向器の断面構成を示す図である。
【図3−1】実施例1における可動板の動きを示す図である。
【図3−2】実施例1における可動板の動きを示す他の図である。
【図4】実施例1の静電容量センサの出力変化の様子を示す図である。
【図5】実施例1の回路構成を示す図である。
【図6−1】実施例1のトーションバー上の配線構成を示す図である。
【図6−2】実施例1のトーションバー上の配線構成を示す他の図である。
【図6−3】単純に引き出したときのトーションバー上の配線構成を示す図である。
【図7】実施例1の第一の変形例の回路構成を示す図である。
【図8】実施例1の第二の変形例の回路構成を示す図である。
【図9】実施例2の偏向器の概略構成を示す図である。
【図10】実施例2の櫛歯電極近傍の構成を拡大して示す図である。
【図11−1】実施例2における可動板の動きを示す図である。
【図11−2】実施例2における可動板の動きを示す他の図である。
【図11−3】実施例2における可動板の動きを示すさらに他の図である。
【図12】実施例2の静電容量センサの出力変化の様子を示す図である。
【図13】実施例2の回路構成を示す図である。
【図14】従来のミラーの角度検出の構成を示す図である。
【符号の説明】
【0067】
100 偏向器
101 ミラー
102 駆動コイル
103a、103b 可動部電極
104、104a、104b 支持体
105a、105b トーションバー
106a、106b 固定部電極
107 ベースフレーム
108a、108b 永久磁石
109 ヨーク
110 電極部
111 第一の配線
112 第二の配線
121a、121b 電極部
200 静電容量検出回路・駆動回路
211 参照信号生成回路
212 加算器
214 振幅制御回路
215 電圧−電流変換回路
216 振幅検出回路
217 バンドパスフィルタ回路
220 接続部
230a、230b 静電容量センサ
240a、240b 静電容量検出回路
241a、241b 容量−振幅変換回路
242a、242b バンドパスフィルタ回路
243a、243b 振幅検出回路
250 減算器
310 駆動回路
400 回路
401 バンドパスフィルタ回路
402 振幅検出回路
403 除算器
500 偏向器
503a、503b 可動部櫛歯電極
506a、506b 固定部櫛歯電極
600 静電容量検出回路・駆動回路
606 活性層
610 駆動回路
640a、640b 静電容量検出回路
641a、641b 参照信号印加回路
DS 駆動信号
RS 参照信号
AX 回転軸
11 軸
12 ミラー
16A、16B、17A、17B 電極
C1、C2 コンデンサ
【特許請求の範囲】
【請求項1】
可動板と、
固定部と、
前記固定部に対して前記可動板を揺動可能に支持する一対の弾性部材と、
前記可動板に設けられた駆動コイルと、
前記駆動コイルに作用する磁束を生成する磁束発生手段と、
前記可動板の揺動角を電気特性の変化として出力する角度検出手段と、
前記駆動コイルの二端のうち第一端と前記角度検出手段の電気端子の一端とを前記可動板上で電気的に接続する接続部と、
前記接続部から前記弾性部材を通して前記固定部へ至る第一の配線と、
を有することを特徴とする偏向器。
【請求項2】
前記角度検出手段は、前記可動板上の第一の電極と、前記第一の電極に対向して設けられた第二の電極との間の静電容量に基づいて前記可動板の揺動角を検出し、
前記接続部は前記第一の電極と前記駆動コイルの第一端を接続することを特徴とする請求項1に記載の偏向器。
【請求項3】
前記固定部に形成した前記第二の電極に接続されており、前記第一の電極と前記第二の電極との間の静電容量を検出する静電容量検出回路と、
前記静電容量検出回路の動作に必要な参照信号を生成する参照信号生成回路と、
前記駆動コイルの駆動指令信号と参照信号を足し合わせる加算器と、
前記加算器の出力を増幅し前記駆動コイルに供給する増幅器とを備え、
前記増幅器の出力は、前記第一の配線と前記固定部側で接続されていること特徴とする請求項2に記載の偏向器。
【請求項4】
前記固定部に形成した前記第二の電極に接続されており、前記第一の電極と前記第二の電極との間の静電容量を検出する静電容量検出回路と、
前記静電容量検出回路の動作に必要な参照信号を生成し前記第二の電極に供給する参照信号生成回路と、
前記駆動コイルの駆動指令信号を増幅する増幅器と、
前記駆動コイルの第二端に前記可動板上で電気的に接続され、前記接続部から前記弾性部材を通して前記固定部へ至る第二の配線と、を備え、
前記増幅器の出力は前記第二の配線と前記固定部側で接続されており、前記第一の配線は前記固定電位へ接続されていることを特徴とする請求項2に記載の偏向器。
【請求項5】
前記参照信号生成回路は、前記偏向器の駆動周波数帯域より離れた周波数の参照信号を生成することを特徴とする請求項3または4に記載の偏向器。
【請求項6】
前記参照信号生成回路は、駆動周波数帯域の最大値に対して所定倍だけ高い帯域の周波数の参照信号を生成することを特徴とする請求項5に記載の偏向器。
【請求項7】
前記増幅器は、駆動コイルへの電流が駆動指令信号に比例するように制御を行う電流増幅回路より構成されており、
前記参照信号生成回路は、前記第一の電極における電圧の参照信号の周波数成分が一定振幅になるように振幅制御を行う振幅制御手段を有することを特徴とする請求項3に記載の偏向器。
【請求項8】
前記増幅器は、前記駆動コイルへの電流が駆動指令信号に比例するように制御を行う電流増幅回路より構成されており、
前記静電容量検出回路は、容量を検出した値を、前記第一の電極における電圧の参照信号の周波数成分の振幅で除算する除算器を備えていることを特徴とする請求項3に記載の偏向器。
【請求項9】
前記第一の電極は前記可動板の端面に形成した櫛歯であり、
前記第二の電極は前記可動板の端面の前記櫛歯と対向した固定端より延在して設置した櫛歯であることを特徴とする請求項2〜8のいずれか一項に記載の偏向器。
【請求項10】
前記第一の電極は前記可動板の回転軸に対して対称に可動板上へ形成した複数の電極であり、
前記第二の電極は前記可動板上の複数の電極と対向している複数の電極であり、
前記可動板上の電極と前記可動板上の電極に対向した電極との容量において、対称に配置した容量の差を角度とすることを特徴とする請求項2〜8のいずれか一項に記載の偏向器。
【請求項1】
可動板と、
固定部と、
前記固定部に対して前記可動板を揺動可能に支持する一対の弾性部材と、
前記可動板に設けられた駆動コイルと、
前記駆動コイルに作用する磁束を生成する磁束発生手段と、
前記可動板の揺動角を電気特性の変化として出力する角度検出手段と、
前記駆動コイルの二端のうち第一端と前記角度検出手段の電気端子の一端とを前記可動板上で電気的に接続する接続部と、
前記接続部から前記弾性部材を通して前記固定部へ至る第一の配線と、
を有することを特徴とする偏向器。
【請求項2】
前記角度検出手段は、前記可動板上の第一の電極と、前記第一の電極に対向して設けられた第二の電極との間の静電容量に基づいて前記可動板の揺動角を検出し、
前記接続部は前記第一の電極と前記駆動コイルの第一端を接続することを特徴とする請求項1に記載の偏向器。
【請求項3】
前記固定部に形成した前記第二の電極に接続されており、前記第一の電極と前記第二の電極との間の静電容量を検出する静電容量検出回路と、
前記静電容量検出回路の動作に必要な参照信号を生成する参照信号生成回路と、
前記駆動コイルの駆動指令信号と参照信号を足し合わせる加算器と、
前記加算器の出力を増幅し前記駆動コイルに供給する増幅器とを備え、
前記増幅器の出力は、前記第一の配線と前記固定部側で接続されていること特徴とする請求項2に記載の偏向器。
【請求項4】
前記固定部に形成した前記第二の電極に接続されており、前記第一の電極と前記第二の電極との間の静電容量を検出する静電容量検出回路と、
前記静電容量検出回路の動作に必要な参照信号を生成し前記第二の電極に供給する参照信号生成回路と、
前記駆動コイルの駆動指令信号を増幅する増幅器と、
前記駆動コイルの第二端に前記可動板上で電気的に接続され、前記接続部から前記弾性部材を通して前記固定部へ至る第二の配線と、を備え、
前記増幅器の出力は前記第二の配線と前記固定部側で接続されており、前記第一の配線は前記固定電位へ接続されていることを特徴とする請求項2に記載の偏向器。
【請求項5】
前記参照信号生成回路は、前記偏向器の駆動周波数帯域より離れた周波数の参照信号を生成することを特徴とする請求項3または4に記載の偏向器。
【請求項6】
前記参照信号生成回路は、駆動周波数帯域の最大値に対して所定倍だけ高い帯域の周波数の参照信号を生成することを特徴とする請求項5に記載の偏向器。
【請求項7】
前記増幅器は、駆動コイルへの電流が駆動指令信号に比例するように制御を行う電流増幅回路より構成されており、
前記参照信号生成回路は、前記第一の電極における電圧の参照信号の周波数成分が一定振幅になるように振幅制御を行う振幅制御手段を有することを特徴とする請求項3に記載の偏向器。
【請求項8】
前記増幅器は、前記駆動コイルへの電流が駆動指令信号に比例するように制御を行う電流増幅回路より構成されており、
前記静電容量検出回路は、容量を検出した値を、前記第一の電極における電圧の参照信号の周波数成分の振幅で除算する除算器を備えていることを特徴とする請求項3に記載の偏向器。
【請求項9】
前記第一の電極は前記可動板の端面に形成した櫛歯であり、
前記第二の電極は前記可動板の端面の前記櫛歯と対向した固定端より延在して設置した櫛歯であることを特徴とする請求項2〜8のいずれか一項に記載の偏向器。
【請求項10】
前記第一の電極は前記可動板の回転軸に対して対称に可動板上へ形成した複数の電極であり、
前記第二の電極は前記可動板上の複数の電極と対向している複数の電極であり、
前記可動板上の電極と前記可動板上の電極に対向した電極との容量において、対称に配置した容量の差を角度とすることを特徴とする請求項2〜8のいずれか一項に記載の偏向器。
【図1】


【図2】
【図3−1】
【図3−2】
【図4】
【図5】
【図6−1】
【図6−2】
【図6−3】
【図7】
【図8】
【図9】
【図10】
【図11−1】
【図11−2】
【図11−3】
【図12】
【図13】
【図14】
【図2】
【図3−1】
【図3−2】
【図4】
【図5】
【図6−1】
【図6−2】
【図6−3】
【図7】
【図8】
【図9】
【図10】
【図11−1】
【図11−2】
【図11−3】
【図12】
【図13】
【図14】
【公開番号】特開2006−184603(P2006−184603A)
【公開日】平成18年7月13日(2006.7.13)
【国際特許分類】
【出願番号】特願2004−378552(P2004−378552)
【出願日】平成16年12月28日(2004.12.28)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成18年7月13日(2006.7.13)
【国際特許分類】
【出願日】平成16年12月28日(2004.12.28)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]