
偏波散乱補償装置および偏波散乱補償方法

本発明は、偏波散乱補償装置およびその方法に関する。偏波散乱補償装置は、送信機に送信され、且つ第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを受信する受信機に用いられる。偏波散乱補償装置において、時系列整列部は、第1の偏波状態の信号および第2の偏波状態の信号の時系列を整列し、偏波散乱推定部は、時系列整列後の信号について、第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数とを推定し、偏波散乱除去部は、第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数とに従い、第2の偏波状態の信号上の第1の偏波状態の信号による散乱と第1の偏波状態の信号上の第2の偏波状態の信号による散乱とを除去する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、概して光通信に関し、特に、光コヒーレント受信機に関する。
【背景技術】
【0002】
光通信システムの容量やフレキシビリティに対する要求が増加するにつれて、コヒーレント光通信技術が益々重要になっている。コヒーレント光通信においては、同じ帯域幅で送信レートを2倍にするために、送信信号は、通常、偏波多重化方法によって2つの光偏波状態に同時に変調される。受信側では、光コヒーレント受信機は、2つの偏波状態の信号を同時に受信し、それらをベースバンドのデジタル信号に変換し、デジタル領域における逆多重化技術を用いて2つの偏波状態の信号を分離し、各偏波状態の信号を順次処理する。上述の内容から、光コヒーレント受信機の性能は、2つの偏波状態の信号が十分に分離されるか否かということに非常に影響されることが分かる。現在、偏波逆多重化のためには適応フィルタが通常用いられる(Seb J. Savory他、”Digital filters for coherent optical receivers”、Optics Express、Vol.16、Issue 2、pp. 804-817参照)。
【0003】
図1は、デジタル偏波逆多重化装置が用いられた周知の光コヒーレント受信機を示す。図1において、光コヒーレント受信機の前部には、局部発振レーザ103、偏波ビームスプリッタ102および104、光90°ミキサ109、光電変換器(O/E)110−113、およびアナログ・デジタル変換器(ADC)114−117が含まれる。図1において、参照符号105−108は、ビームスプリット信号を指す。前方の機能は、受信された偏波多重化光信号101をベースバンド電気信号118および119に変換することである。チャネルの偏波状態回転および非線形効果等の影響を受けるため、ベースバンド電気信号118および119の各々には、2つの偏波状態中に変調された電気信号が混合する。そこで、等化兼偏波逆多重化器120には、相互がクロストークしない信号、すなわち、図示したH偏波状態信号125およびV偏波状態信号126が得られるように2つの偏波状態の信号を分離するために、ベースバンド電気信号118および119を等化および逆多重することが要求される。次に、H偏波状態位相回復器121、H偏波状態データ回復器123、V偏波状態位相回復期122、およびV偏波状態データ回復器124によって、信号の位相回復およびデータ回復がそれぞれ実行される。一般的には、等化兼偏波逆多重化器120は、適応フィルタによって実装され、そのコヒーレント調整には、一定係数アルゴリズム(Constant Modular Algorithm)、最小平均二乗誤差アルゴリズム(S.J. Savoy他、“Transmission of 42.8Gbit/s Polarization Multiplexed NRZ-QPSK over 6400km of Standard Fiber with no Optical Dispersion Compensation”、paper OTuA1、Proceedings of OFC 2007参照)等が適用され得る。これらのアルゴリズムには、H偏波状態信号125とV偏波状態信号126との間にクロストークが存在しないように、チャネルの状態変化に従ってフィルタのコヒーレントを調整するフィードバック構造が用いられる。
【0004】
現在の研究においては、チャネルの偏波状態の変化がKHz規模である場合、適用フィルタは、この規模での偏波状態の変化を追跡できることが示されている。しかしながら、様々な理由(例えば、チャネルの非線形効果)に起因して、チャネルの偏波状態の変化は、信号の伝送レートの規模、すなわち、GHz規模に達し得る。現在の適用フィルタは、そのような高速の偏波状態の変化を追跡できず、このため、未処理の偏波散乱の存在に起因して、出力されたH偏波状態信号125とV偏波状態信号126との間にクロストークが生じ得る(G. Charlet他、“Performance comparison of singly-polarized and polarization multiplexed at 10Gbaud under nonlinear impairments”、OThu8、proceeding of OFC 2008参照)。2つの偏波状態において、送信信号をShおよびSv、受信信号をRhおよびRvとし、その他の信号損失が理想的に補償されている仮定する。そうすると、2つの偏波状態の間に偏波散乱が存在しないケースでは、Rh=Sh+nhおよびRv=Sv+nv(nhおよびnvは、それぞれHおよびV偏波状態のノイズである)。2つの偏波状態の間に何らかの偏波散乱が存在するケースでは、Rh=WhhSh+WhvSv+nhおよびRv=WvvSh+WvhSv+nv(Whh、Wvv、Whv、およびWvhは、偏波散乱係数であり、1よりも小さい偏角を有するすべての複素数である)。上述の2つのケースを比較することによって、偏波散乱に起因して、一方の偏波状態信号が他方の偏波状態信号にクロストークし得ることや、2つの偏波状態中に変調された信号が相互に独立すると、2つの偏波状態信号間のクロストークが受信信号の信号対雑音比(SNR)を確実に減少させること、故に、受信機の性能に影響を与えることが分かる。
【0005】
したがって、信号のクロストークにより生じる光コヒーレント受信機の性能への影響を除去ないし削減できるように、急速な偏波散乱を処理するための新たな方法や装置が必要である。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、関連技術の限界に起因して生じる1つ以上の問題を解決し、少なくとも1つの有益な選択を提供できるように、関連技術について提案する。
【課題を解決するための手段】
【0007】
本発明の目的を実現するために、本発明は、以下の側面を提供する。
側面1:送信機により送信され、第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを受信する受信機に用いられる偏波散乱補償装置であって、
第1の偏波状態の信号と第1の偏波状態の信号が送信されるときに送信機により同時に送信された第2の偏波状態の信号との時系列を整列する時系列整列部と、
時系列整列後の第1の偏波状態および第2の偏波状態の信号について、第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数とを推定する偏波散乱推定部と、
偏波散乱推定部により推定された第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数とに従って、第2の偏波状態の信号上の第1の偏波状態の信号による散乱と第1の偏波状態の信号上の第2の偏波状態の信号による散乱とを除去する偏波散乱除去部と、
を含む偏波散乱補償装置。
【0008】
側面2:H偏波状態位相回復器と、V偏波状態位相回復器と、H偏波状態データ回復器と、V偏波状態データ回復器とを含むコヒーレント受信機であって、H偏波状態位相回復器およびV偏波状態位相回復器からの信号を受信し、H偏波状態データ回復器およびV偏波状態データ回復器に信号を出力する側面1に従った偏波散乱補償装置を含むコヒーレント受信機。
【0009】
側面3:送信機により送信され、第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを受信する受信機に用いられる偏波散乱補償方法であって、
第1の偏波状態の信号と第1の偏波状態の信号が送信されるときに送信機により同時に送信された第2の偏波状態の信号との時系列を整列する時系列整列処理と、
時系列整列後の第1の偏波状態および第2の偏波状態の信号について、第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数とを推定する偏波散乱推定処理と、
偏波散乱推定処理により推定された第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数とに従って、第2の偏波状態の信号上の第1の偏波状態の信号による散乱と第1の偏波状態の信号上の第2の偏波状態の信号による散乱とを除去する偏波散乱除去処理と、
を含む偏波散乱補償方法。
【発明の効果】
【0010】
本発明の実施形態に従った方法および装置は、2つの偏波状態間のクロストークを推定できるように、伝送リンクの各種要因により生じた高速の偏波変化を追跡して回復することができる。
【0011】
本発明のこれらの態様および特徴や更なる態様および特徴は、以下の記述や図面を参照しながら明らかにされ得る。その記述や図面には、本発明の原理を用い得る方法を示すために、本発明の具体的な実施形態が詳細に開示される。しかしながら、その範囲に応じて本発明が限定されると評価すべきではない。本発明は、添付の請求項の精神および範囲内の多数の変更、改良、および均等物を含み得る。
【0012】
一実施形態について記述および/または図示された特徴は、他の実施形態の特徴と組み合わせまたは置き換えるために、1つ以上の他の実施形態と同一または同様に用いられ得る。
【図面の簡単な説明】
【0013】
【図1】デジタル偏波逆多重化が用いられる周知の光コヒーレント受信機の概略図である。
【図2】本発明の実施形態に従った光コヒーレント受信機の概略図である。
【図3】本発明の実施形態に従った偏波散乱補償装置の概略図である。
【図4】本発明の実施形態に従った偏波散乱推定部の概略図である。
【図5A】本発明の実施形態に従った偏波散乱除去部の概略図である。
【図5B】本発明の別の実施形態に従った偏波散乱除去部の概略図である。
【図5C】本発明の更に別の実施形態に従った偏波散乱除去部の概略図である。
【図6】本発明の別の実施形態に従った偏波散乱補償装置の概略図である。
【図7】本発明の更に別の実施形態に従った偏波散乱除去部の概略図である。
【図8】本発明の実施形態に従った偏波散乱補償方法の概略的なフローチャートである。
【図9】本発明の実施形態に従った、時系列整列後の第1および第2の偏波状態の信号についてステップS802における偏波散乱係数の推定の概略的なフローチャートである。
【図10】本発明の実施形態に従った、ステップS803における対応する偏波散乱の除去の概略的なフローチャートである。
【図11】本発明の別の実施形態に従った光コヒーレント受信機の概略図である。
【図12】本発明の実施形態に従った方法、装置、ユニットを実装可能なコンピュータの概略的なブロック図である。
【発明を実施するための形態】
【0014】
本発明の例示的な実施形態を図面を参照しながら以下に記述する。明確かつ簡潔にするために、明細書には、実際の実施形態のすべての特徴が記載されているわけではない。しかしながら、実際の実施形態の何れかを開発する過程においては、開発者が具体的目標を実現するためには、実施形態の多くの具体的決定を策定しなければならないことは当然である。例えば、システムおよびサービスに関する一定条件が充足され、これらの一定条件は、実施形態によって異なり得る。また、開発は非常に複雑で時間がかかるが、開示によって得られる技術を熟知する技術者にとっては、その開発が単なる定型的な業務になることに注目すべきである。
【0015】
不必要な細部に起因して本発明が漠然となることを避けるために、図面には、本発明に従った解決法に密接に関連する装置の構造および/または処理ステップのみが図示され、密接に関連しないその他の細部が省略されていることに注意すべきである。
【0016】
本発明の実施形態の基本的な動作原理は、2つの偏波状態間のクロストークを除去できるように、逆多重化された信号間のクロストークに従って偏波散乱係数を推定し、推定された偏波散乱係数に従って信号の偏波回復を実行することである。
【0017】
本発明の実施形態を図面を参照しながら以下に詳述する。
図2は、本発明の実施形態に従った光コヒーレント受信機の概略図である。図1に示した関連技術の光コヒーレント受信機と比較すると、図2に示した本発明の実施形態に従った光コヒーレント受信機には、本発明の実施形態に従った偏波散乱補償装置200が追加されるだけであり、その他の部分は変更されない。偏波散乱補償装置200は、偏波逆多重化や位相回復がなされている信号127および128を受信し、それらの偏波散乱の回復を実行し、偏波散乱回復後の信号205および206をデータ回復装置(H偏波状態データ回復器123およびV偏波状態データ回復器124)に出力する。
【0018】
図3は、本発明の実施形態に従った偏波散乱補償装置200の概略図である。図3に示すように、本発明の実施形態に従った偏波散乱補償装置200は、時系列整列部300、偏波散乱推定部400、および偏波散乱除去部500を含む。
【0019】
一実施形態では、時系列整列部300は、遅延レジスタ301および302を含む。偏波散乱補償装置200の入力は、2つの偏波状態にある位相回復された信号127および128である。信号127および128は、Delay_HおよびDelay_Vシンボルとして遅延レジスタ301および302によりそれぞれ遅延される。遅延処理の目的は、送信側での時系列関係と一致する2つのチャネルの信号(H偏波状態信号およびV偏波状態信号)間の相対的な時系列関係を維持することである。すなわち、送信機により同時に送信されたH偏波状態信号およびV偏波状態信号の時系列は、時系列整列後に変更されずに維持される。Delay_HおよびDelay_Vの値は、受信機の上層の処理モジュール(例えば、フレーム処理モジュール)から取得され得る。遅延レジスタ301および302の出力201および202は、(図4を参照しながら後で詳述する)偏波散乱推定部400に入力される。偏波散乱推定部400は、2つのチャネルの信号の偏波散乱係数を推定し、それらを信号203および204として出力する。それらの内で、信号203は、H偏波状態信号上のV偏波状態信号の偏波散乱係数であり、信号204は、V偏波状態信号上のH偏波状態信号の偏波散乱係数である。(図5を参照しながら後で詳述する)偏波散乱除去部500は、受信した信号203および204を処理することによって偏波散乱回復を実行し、偏波散乱回復後の信号205および206を出力する。H偏波状態データ回復器123およびV偏波状態データ回復器124は、信号205および信号206に従ってデータをそれぞれ回復する。2つの偏波状態の信号の時系列は、上述の2つの遅延レジスタを用いて整列されるが、当然のことながら、当業者によれば2つの偏波状態の信号の時系列が単に1つの遅延レジスタを用いて整列され得ることに留意すべきである。
【0020】
図4は、本発明の実施形態に従った偏波散乱推定部400の概略図である。図4に示すように、偏波散乱推定部400の入力は、時系列が整列された信号201および202、すなわち、H偏波状態信号RhおよびV偏波状態信号Rvである。信号201および202に従って、データ判定器401および402は、2つの偏波状態の信号上に変調されたデータ403および404(判定データ、すなわち、

および
)をそれぞれ推定する。データ判定器401および402は、ソフト判定やハード判定等の現在ないし今後当業者に周知の任意の技術的方法でデータ判定を実行し得る。
【0021】
判定データ403および404と信号201および202とは、偏波散乱係数推定部405に一緒に入力され、偏波散乱係数推定部405は、2つの偏波状態の信号および判定データに従って、各シンボル時点での偏波散乱係数、すなわち、H偏波状態信号上のV偏波状態信号の散乱係数WhvおよびV偏波状態信号上のH偏波状態信号の散乱係数Wvhを計算する。一実施形態では、これらの散乱係数は、次の数式で推定され得る。
【数1】
【数2】
【0022】
各シンボル時点でのWhvおよびWvhは、信号406および407としてそれぞれ出力される。次に、ノイズの影響を除去するために、アベレージャ408および409によってそれらはそれぞれ平均化される。平均化されるWhvおよびWvhの数は、必要に応じて決定され得る。アベレージャ408および409の出力信号203および204は、推定された偏波散乱係数である。
【0023】
図5Aは、本発明の実施形態に従った偏波散乱除去部の概略図である。2つの偏波状態の変調信号をShおよびSvとする(例えば、QPSKについては、
【数3】
であり、
【数4】
であり、ここで、
および
の何れかは、π/4、3π/4、5π/4、または7π/4である)。一般的に、RhおよびRvは、ShおよびSvを用いて次のように表される。
【数5】
【0024】
RhおよびRvは、適用フィルタにより実行される偏波逆多重化を通じて取得される信号であり、WhhおよびWvvの和が1とおおよそ等しいと共に、|Wvh|および|Whv|が共に1よりはるかに小さいと仮定し得る。したがって、(Rh,Rv)と(Sh,Sv)との関係は、次のように簡約し得る。
【数6】
【0025】
上述の関係に従い、偏波散乱行列は、本発明の実施形態に従った偏波散乱推定部により偏波散乱係数WhvおよびWvhが決定された時点で決定され得る。偏波散乱除去部は、次式に示されるように、受信信号に関する偏波散乱行列についての逆算を単に実行することによって偏波回復を実現できる。
【数7】
【0026】
図5に示したような本発明の実施形態に従った偏波散乱除去部は、受信したRhおよびRvと偏波散乱行列の逆行列を直接乗算することによって偏波散乱を除去する。
【0027】
具体的には、図5Aに示すように、偏波散乱除去部500は、偏波散乱係数WhvおよびWvhに従って2つの偏波状態の信号間の偏波散乱行列の逆行列を計算するよう構成された逆行列計算部501と、2つの偏波状態の信号間の偏波散乱行列の計算された逆行列と信号RhおよびRvを乗算するよう構成された乗算器502とを含む。
【0028】
図5Aの偏波散乱除去部は、受信信号を偏波散乱行列の逆行列と乗算することによって2つの偏波状態の偏波回復信号を取得し、それらを偏波散乱回復信号205および206として出力する。
【0029】
図5Bは、本発明の別の実施形態に従った偏波散乱除去部の概略図である。図5は、本発明の偏波散乱除去部の第2の実施を示す。この実施では、偏波散乱推定部のデータ判定部により判定されたデータ
および
が送信データShおよびSvであると仮定する。したがって、2つの偏波状態の信号間の散乱量505および506は、乗算器503および504を通じて
をWhvと乗算し、
をWhvと乗算することによりそれぞれ取得される。次に、減算器507および508を通じて受信信号から散乱量を減算することによって、偏波回復が実現される。
【0030】
図5Cは、本発明の更に別の実施形態に従った偏波散乱除去部の概略図である。図5Cは、本発明の偏波散乱除去部の第3の実施を示す。この実施では、図5Aに示した第1の実施の簡易化とみなし得る。前述したように、|Wvh|および|Whv|は共に1よりはるかに小さく、故に、|Whv*Wvh|は1よりはるかに小さく、次のように、偏波散乱行列の逆行列中のWhv*Wvhを省くことによって、簡易化された偏波散乱除去方法が得られる。
【数8】
【0031】
本発明の実施形態の偏波散乱除去部の第3の実施は、これに基づいて単に簡易化された方法である。図5Cに示したように、2つの偏波状態の信号間の散乱量511および512は、乗算器409および410を通じて受信信号RvおよびRhをWhvおよびWvhと乗算することによってそれぞれ取得される。次に、減算器513および514を通じて受信信号から対応する偏波散乱量を減算することによって、偏波回復は実現される。
【0032】
図6は、本発明の別の実施形態に従った偏波散乱補償装置200´の概略図である。
具体的には、図6に示すように、偏波散乱補償装置200´は、時系列整列部300´、偏波散乱推定部400´、および偏波散乱除去部500´を含む。
【0033】
時系列整列部300´は、第1の遅延レジスタ601、第2の遅延レジスタ602、第3の遅延レジスタ603、および第4の遅延レジスタ604を含む。
【0034】
第1の遅延レジスタ601および第4の遅延レジスタ604は、送信側により同時に送信された2つの偏波状態の信号RhおよびRvの時系列を整列するよう構成された本発明の実施形態に従った時系列整列サブユニットに対応する。第2の遅延レジスタ602および第4の遅延レジスタ604は、送信側により同時に送信された2つの偏波状態の信号RhおよびRvの内の1つ(例えば、V偏波状態信号Rv)と、2つの偏波状態の信号RhおよびRvの内の他の1つ(例えば、H偏波状態信号Rh)の数シンボル周期(例えば、図6に示すように1シンボル)前の信号Rh´との時系列を整列するよう構成された本発明の実施形態に従った第1の付加的時系列整列部に対応する。第3の遅延レジスタ603および第4の遅延レジスタ604は、送信側により同時に送信された2つの偏波状態の信号RhおよびRvの内の1つ(例えば、V偏波状態信号Rv)と、2つの偏波状態の信号RhおよびRvの内の他の1つ(例えば、H偏波状態信号Rh)の数シンボル周期(例えば、1シンボル)後の信号Rh´´との時系列を整列するよう構成された本発明の実施形態に従った第2の付加的時系列整列部を構成する。
【0035】
2つの偏波状態の信号の時系列は、上述では、4つの遅延レジスタを用いて整列されるが、2つの偏波状態の信号の時系列が3つ、5つ、または6つの遅延レジスタを用いて整列され得ることは当業者にとって当然であることに留意すべきである。6つの遅延レジスタが用いられるケースでは、時系列整列部、第1の付加的時系列整列部、および第2の付加的時系列整列部は、2つの遅延レジスタを用いてそれぞれ実現され得る。
【0036】
偏波散乱推定サブユニット609、第1の付加的偏波散乱推定サブユニット610、および第2の付加的偏波散乱推定サブユニット611は、図4を参照して前述した偏波散乱推定部の構造に採り入れられ得る。
【0037】
そこで、偏波散乱推定サブユニット609は、送信側により同時に送信された2つの偏波状態の信号の散乱係数を推定する。第1の付加的偏波散乱推定サブユニット610および第2の付加的偏波散乱推定サブユニット611は、一方の偏波状態の信号とその信号より1シンボル周期前の他方の偏波状態の信号との間の散乱係数、および一方の偏波状態の信号とその信号より1シンボル周期後の他方の偏波状態の信号との間の散乱係数をそれぞれ推定する。図6に示したように、偏波散乱推定サブユニット609の出力612および613は、同時に送信されたHおよびV偏波状態信号間の偏波散乱係数Whv(t)およびWvh(t)である。第1の付加的偏波散乱推定サブユニット610の出力614および615は、V偏波状態信号と1シンボル前に送信されたH偏波状態信号との間の偏波散乱係数Whv(t−T)およびWvh(t−T)である。第2の付加的偏波散乱推定サブユニット611の出力616および617は、V偏波状態信号と1シンボル後に送信されたH偏波状態信号との間の偏波散乱係数Whv(t+T)およびWvh(t+T)である。3つの偏波散乱推定手段の出力および時系列が整列された受信信号RhおよびRvは、偏波散乱除去部500´にすべて入力される。
【0038】
偏波散乱除去部500´は、偏波散乱除去サブユニット618、第1の付加的偏波散乱除去サブユニット619、および第2の付加的偏波散乱除去サブユニット620を含む。偏波散乱除去サブユニット618は、偏波散乱推定サブユニット609により取得された散乱係数に従って、送信側により同時に送信された2つの偏波状態の信号間の散乱を除去するように構成される。第1の付加的偏波散乱除去サブユニット619は、第1の付加的偏波散乱推定サブユニット610により取得された散乱係数に従って、一方の偏波状態の信号と1シンボル周期以上前の他方の偏波状態の信号との間の散乱を除去するように構成される。第2の付加的偏波散乱除去サブユニット620は、第2の付加的偏波散乱推定サブユニット611により取得された散乱係数に従って、一方の偏波状態の信号と1シンボル周期以上後の他方の偏波状態の信号との間の散乱を除去するように構成される。
【0039】
偏波散乱除去部500´では、現時点における他方の偏波状態の信号からの隣接シンボル間の散乱がまず算出され得、次に、H偏波状態信号RhからV偏波状態信号の散乱を減算し且つV偏波状態信号RvからH偏波状態信号の散乱を減算することによって、偏波回復が実現される。例えば、図5Cに対応する方法が実施された場合、時点tにおいて、H偏波状態信号についてV偏波状態信号からの散乱は、Whv(t)Rv(t)+Whv(t+T)Rv(t−T)+Whv(t−T)Rv(t+T)であり、V偏波状態信号についてH偏波状態信号からの散乱は、Wvh(t)Rh(t)+Wvh(t+T)Rh(t+T)+Wvh(t−T)Rh(t−T)である。
【0040】
そして、このとき、第1の付加的偏波散乱除去サブユニット619は、上記式中の第3項をそれぞれ計算および除去し得、すなわち、第1の偏波状態の信号が送信機により送信される1シンボル以上前の時点で送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱を除去し得、第1の偏波状態の信号が送信機により送信される1シンボル以上前の時点で送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱を除去し得る。第2の付加的偏波散乱除去サブユニット620は、上記式中の第2項をそれぞれ計算および除去し得、すなわち、第1の偏波状態の信号が送信機により送信された1シンボル以上後の時点で送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱を除去し得、第1の偏波状態の信号が送信機により送信された1シンボル以上後の時点で送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱を除去し得る。第2の偏波散乱除去サブユニット620は、上記式中の第1項をそれぞれ計算および除去し得る。
【0041】
図6に示した実施形態では、V偏波状態信号と1シンボル周期前に送信されたH偏波状態信号との間の散乱係数Whv(t−T)およびWvh(t−T)、ならびにV偏波状態信号と1シンボル周期後に送信されたH偏波状態信号との間の散乱係数Whv(t+T)およびWvh(t+T)は、送信機により同時に送信されたHおよびV偏波状態信号間の散乱係数Whv(t)およびWvh(t)を基に付加的に計算されるが、本発明がこれに限定されないことに留意すべきである。本発明の別の実施形態では、V偏波状態信号と1シンボル周期前に送信されたH偏波状態信号との間の散乱係数Whv(t−T)およびWvh(t−T)が単に計算されてもよい。その場合、V偏波状態信号上のH偏波状態信号による散乱は、Wvh(t)Rh(t)+Whv(t−T)Rh(t−T)であると共に、計算されるH偏波状態信号上のV偏波状態信号による散乱は、Whv(t)Rv(t)+Whv(t−T)Rv(t+T)である。また、V偏波状態信号と1シンボル周期後に送信されたH偏波状態信号との間の散乱係数Whv(t+T)およびWvh(t+T)が単に計算されてもよい。その場合、V偏波状態信号上のH偏波状態信号による散乱は、Wvh(t)Rh(t)+Wvh(t+T)Rh(t+T)であると共に、計算されるH偏波状態信号上のV偏波状態信号による散乱は、Whv(t)Rv(t)+Whv(t+T)Rv(t−T)である。
【0042】
図7は、本発明の実施形態に従った偏波散乱除去部500´の概略図である。図7に示すように、偏波散乱除去部500´には、信号列Rh(t)およびRv(t)(RhおよびRvとも記される)がそれぞれ入力される。また、偏波散乱推定サブユニット609−611の出力も偏波散乱除去部500´に入力される。偏波散乱除去部500´は、Rh入力遅延器701および3次遅延レジスタ702を含む。遅延器701は、(D−2)シンボル周期Rhを遅延し、ここで、Dシンボル周期は、前部の偏波散乱推定に要する計算時間であり、そして、3次遅延レジスタ702の出力は、それぞれ、推定された偏波散乱係数と同期するRh(t−T)、Rh(t)、およびRh(t+T)である。Rh(t+T)は、次の時点におけるH偏波状態信号からのV偏波状態信号上の散乱を取得するために、入力された偏波散乱係数Wvh(t+T)と、乗算器704において乗算される。Rh(t−T)は、前の時点におけるH偏波状態信号からのV偏波状態信号上の散乱を取得するために、入力された偏波散乱係数Wvh(t−T)と、乗算器703において乗算される。Rh(t)は、同時に送信されたH偏波状態信号からのV偏波状態信号上の散乱を取得するために、入力された偏波散乱係数Wvh(t)と、乗算器705において乗算される。3つの散乱は、H偏波状態信号の3つの隣接シンボルからのV偏波状態信号上の散乱を取得するために、加算器706において加算される。V偏波状態信号の偏波回復は、減算器714を通じて、Rv(t)から散乱を減算することにより実現される。
【0043】
同様に、Rvは、遅延器707、ならびにRv(t−T)、Rv(t)、およびRv(t+T)を取得するための3次遅延レジスタ708により処理さる。Rv(t+T)は、次のシンボル時点におけるV偏波状態信号からのH偏波状態信号上の散乱を取得するために、入力された偏波散乱係数Whv(t−T)と、乗算器709において乗算される。Rv(t−T)は、前の時点におけるV偏波状態信号からのH偏波状態信号上の散乱を取得するために、入力された偏波散乱係数Whv(t+T)と、乗算器710において乗算される。Rv(t)は、同時に送信されたV偏波状態信号からのH偏波状態信号上の散乱を取得するために、入力された偏波散乱係数Whv(t)と、乗算器711において乗算される。3つの散乱は、V偏波状態信号の3つの隣接シンボルからのH偏波状態信号上の散乱を取得するために、加算器712において加算される。H偏波状態信号の偏波回復は、減算器713を通じて、Rh(t)から散乱を減算することにより実現される。
【0044】
図7の加算器706および減算器714は、3つの減算器に置き換えてもよく、3つの減算器の集積とみなし得ることは明らかである。加算器712および減算器713もまた、3つの減算器に置き換えてよく、3つの減算器の集積とみなし得る。
【0045】
図7において、遅延器701、702、707、および708、乗算器703および減算器714、ならびに乗算器709および減算器713は、第1の付加的散乱除去部に対応し、遅延器701、702、707、および708、乗算器704および減算器714、ならびに乗算器710および減算器713は、第2の付加的散乱除去器に対応する。
【0046】
また、本発明の別の実施形態に従えば、RvおよびRhを列中の前方または後方にシフトするよりも、
および
を列中の前方または後方にシフトして、対応する偏波散乱係数と乗算し得る。この技術的解決方法は、図5Bおよび図7を参照することによってより理解することができ、ここでは説明を省略する。
【0047】
図7は、図6の偏波散乱除去部500´の一実施形態を図示しただけであり、当業者であれば、記述に基づいて、本発明の範囲内に含まれる他の実施形態を想到することは可能である。
【0048】
また、図6−図7には、図5Cと比較して第1および第2の付加的偏波散乱除去サブユニットが追加されているが、当業者であれば、第1および第2の付加的偏波散乱除去サブユニットの内の1つのみを追加し得ることは当然である。
【0049】
図6の偏波散乱補償装置200´は、一方の偏波状態の信号上における他方の偏波状態の信号の複数シンボルからの偏波散乱を推定および除去することによって、偏波散乱を補償し、これにより、図3の偏波散乱補償装置200よりも理想的に偏波回復を達成する。
【0050】
また、図6では、一例として3次(すなわち、一方の偏波状態の信号の時系列と、前のシンボル時点、同時、および次のシンボル時点における他方の偏波状態の信号の時系列とをそれぞれ整列し、対応する偏波散乱係数を計算し、偏波散乱を除去する)を採るが、性能上の必要性に応じて、より複雑なハードウェアとより大きな処理負荷というコストを伴うより高次(すなわち、一方の偏波状態の信号の時系列と、更なるシンボル時点における他方の偏波状態の信号の時系列とを整列し、対応する偏波散乱係数を計算し、偏波散乱を除去する)を図6に用いてもよい。
【0051】
上述から理解できるように、本発明の実施形態に従った偏波回復装置には、偏波散乱係数を直接推定し、その係数に基づいて偏波散乱を修正する偏波散乱補償装置が用いられ、これによって、偏波回復の追跡速度が大幅に改善されるのに対し、従来技術では、偏波回復後の出力と理想的な出力との間のエラーに基づいて偏波回復の動作パラメータが調整される点で、本発明の偏波回復装置は、適応フィルタに基づく従来の偏波回復とは主に異なる。
【0052】
図8は、本発明の別の実施形態に従った偏波散乱補償方法の概略図である。偏波散乱補償方法は、送信機により送信され、且つ第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを受信する受信機に用いられる。図8に示すように、本発明の実施形態に従った偏波散乱補償方法では、まず、ステップS801において、2つの偏波状態にある信号の時系列を整列し、次に、ステップS802において、一方の偏波状態の信号による他方の偏波状態の信号上の散乱の散乱係数と、一方の偏波状態の信号上の他方の偏波状態の信号による散乱の散乱係数とを推定し、ステップS803において、一方の偏波状態の信号による他方の偏波状態の信号上の散乱と、一方の偏波状態の信号上の他方の偏波状態の信号による散乱とをステップS802で獲得された偏波散乱係数に基づき除去する。
【0053】
具体的には、一実施形態では、ステップS801において、第1の偏波状態の信号(例えば、H偏波状態信号)と、第1の偏波状態の信号が送信機により送信されたときに同時に送信された第2の偏波状態の信号(例えば、V偏波状態信号)との時系列を時系列整列部が整列する。次に、ステップS802において、時系列整列後の第1および第2の偏波状態の信号について、第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数Wvhと、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数Whvとを偏波散乱推定部が推定する。最後に、ステップS803において、偏波散乱推定部により推定された第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数とに従って、第2の偏波状態の信号上の第1の偏波状態の信号による散乱と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱とを偏波散乱除去部が除去する。
【0054】
別の実施形態では、ステップS801において、時系列整列部は、第1の偏波状態の信号(例えば、H偏波状態信号)と、第1の偏波状態の信号が送信機により送信されたときに同時に送信された第2の偏波状態の信号(例えば、V偏波状態信号)との時系列を整列するのみならず、第1の偏波状態の信号(例えば、H偏波状態信号)と、第1の偏波状態の信号が送信機により送信された1シンボル以上後のシンボル時点で送信された第2の偏波状態の信号(例えば、V偏波状態信号)との時系列を整列する。次に、ステップS802において、偏波散乱推定部は、時系列整列後の第1および第2の偏波状態の信号について、第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数Wvh(t)と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数Whv(t)とを推定する。また、偏波散乱推定部は、時系列整列後の第1の偏波状態の信号と、第1の偏波状態の信号が送信機により送信された1シンボル以上後のシンボル時点で送信された第2の偏波状態の信号とについて、第1の偏波状態の信号が送信機により送信機により送信された1シンボル以上後のシンボル時点で送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数Wvh(t+T)と、第1の偏波状態の信号が送信機により送信された1シンボル以上後のシンボル時点で送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱の散乱係数Whv(t+T)とをも推定する。最後に、ステップS803において、偏波散乱除去部は、第1の偏波状態の信号が送信されたときに同時に送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱と、第1の偏波状態の信号が送信されたときに同時に送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱と、第1の偏波状態の信号が送信された1シンボル以上後のシンボル時点で送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱と、第1の偏波状態の信号が送信された1シンボル以上後のシンボル時点で送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱とを、偏波散乱推定部により推定された第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数と、Wvh(t+T)およびWhv(t+T)とに従って除去する。
【0055】
さらに別の実施形態では、ステップS801において、時系列整列部は、第1の偏波状態の信号(例えば、H偏波状態信号)と、第1の偏波状態の信号が送信機により送信されたときに同時に送信された第2の偏波状態の信号(例えば、V偏波状態信号)との時系列を整列するのみならず、第1の偏波状態の信号と、第1の偏波状態の信号が送信機により送信される1シンボル以上前のシンボル時点で送信された第2の偏波状態の信号との時系列を整列する。次に、ステップS802において、偏波散乱推定部は、時系列整列後の第1および第2の偏波状態の信号について、第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数Wvh(t)と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数Whv(t)とを推定する。また、偏波散乱推定部は、時系列整列後の第1の偏波状態の信号と、第1の偏波状態の信号が送信機により送信機により送信される1シンボル以上前のシンボル時点で送信された第2の偏波状態の信号とについて、第1の偏波状態の信号が送信機により送信される1シンボル以上前のシンボル時点で送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数Wvh(t−T)と、第1の偏波状態の信号が送信機により送信される1シンボル以上前のシンボル時点で送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱の散乱係数Whv(t−T)とをも推定する。最後に、ステップS803において、偏波散乱除去部は、第1の偏波状態の信号が送信されたときに同時に送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱と、第1の偏波状態の信号が送信されたときに同時に送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱と、第1の偏波状態の信号が送信される1シンボル以上前のシンボル時点で送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱と、第1の偏波状態の信号が送信される1シンボル以上前のシンボル時点で送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱とを、偏波散乱推定部により推定された第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数と、Wvh(t−T)およびWhv(t−T)とに従って除去する。
【0056】
更なる実施形態では、ステップS801において、時系列整列部は、第1の偏波状態の信号(例えば、H偏波状態信号)と、第1の偏波状態の信号が送信機により送信されたときに同時に送信された第2の偏波状態の信号(例えば、V偏波状態信号)との時系列を整列するのみならず、第1の偏波状態の信号と、第1の偏波状態の信号が送信機により送信される1シンボル以上前のシンボル時点で送信された第2の偏波状態の信号との時系列を整列する。また、時系列整列部は、第1の偏波状態の信号と、第1の偏波状態の信号が送信機により送信された1シンボル以上後のシンボル時点で送信機により送信された第2の偏波状態の信号との時系列を整列する。次に、ステップS802において、偏波散乱推定部は、散乱係数Wvh(t)、Whv(t)、Wvh(t−T)、Whv(t−T)、Wvh(t+T)、およびWhv(t+T)を推定する。最後に、ステップS803において、偏波散乱除去部は、第2の偏波状態の信号上の第1の偏波状態の信号による散乱と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱とを、散乱係数Wvh(t)、Whv(t)、Wvh(t−T)、Whv(t−T)、Wvh(t+T)、およびWhv(t+T)に従って除去する。
【0057】
図9は、本発明の実施形態に従った、時系列の整列(例えば、第1の偏波状態の信号Rhと、第1の偏波状態の信号Rhが送信されたときに同時に送信された信号Rvとの時系列の整列、第1の偏波状態の信号Rhと、第1の偏波状態の信号Rhが送信された1シンボル後のシンボル時点で送信された信号Rv+1との時系列の整列、または第1の偏波状態の信号Rhと、第1の偏波状態の信号Rhが送信される1シンボル前のシンボル時点で送信された信号Rv−1との時系列の整列)後の第1および第2の偏波状態の信号についてステップS802で偏波散乱係数を推定する概略的フローチャートである。
【0058】
図9に示すように、本発明の実施形態に従えば、まずステップS901において、第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを判定するデータ判定が行なわれる。次に、ステップS902において、第1の偏波状態の信号上に変調されたデータ、第2の偏波状態の信号上に変調されたデータ、第1の偏波状態の信号、および第2の偏波状態の信号に従って、各シンボル時点での第2の偏波状態の信号上の第1の偏波状態の信号による偏波散乱の偏波散乱係数と、第1の偏波状態の信号上の第2の偏波状態の信号による偏波散乱の偏波散乱係数とを決定する。最後に、ステップS903において、複数のシンボル時点における第2の偏波状態の信号上の第1の偏波状態の信号による偏波散乱の偏波散乱係数を平均し、複数のシンボル時点における第1の偏波状態の信号上の第2の偏波状態の信号による偏波散乱の偏波散乱係数を平均する。
【0059】
図10は、本発明の実施形態に従った、ステップS803において対応する偏波散乱を除去する概略的フローチャートである。
図10に示すように、まずステップS1001において、乗算を実行し、例えば、第1の偏波状態の信号が送信されたときに同時に送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱を除去する場合に、第1の偏波状態の信号またはその上に変調されたデータを第2の偏波状態の信号上の第1の偏波状態の信号による偏波散乱の偏波散乱係数と乗算する。次に、ステップS1002において、減算を実行し、例えば、第1の偏波状態の信号が送信されたときに同時に送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱を除去する場合に、第2の偏波状態の信号からステップS1001により取得された乗算結果を減算する。
【0060】
ステップS803において、図10のS1002およびS1002の各ステップを数回実行でき、これらのステップを並行して実行し得ることは明らかである。
図10の乗算および減算のステップは、第1の偏波状態の信号が送信されたときに同時に送信された第2の偏波状態の信号上の第1の偏波状態の信号による偏波散乱を除去する例を通じて上述されている。その他の偏波散乱の除去、例えば、第1の偏波状態の信号が送信される1シンボル以上前または後の時点で送信された第2の偏波状態の信号上の第1の偏波状態の信号による偏波散乱等の除去については、実行される乗算および減算についての図5A−図7の偏波散乱除去部の記述を参照されたく、ここでは説明を省略する。
【0061】
図11は、本発明の別の実施形態に従った光コヒーレント受信機の概略図である。図11に示すように、光コヒーレント受信機は、図2の等化兼偏波逆多重化器が図11の低速等化兼偏波多重化器120´に置き換えられている点で異なる。
【0062】
偏波逆多重化に用いられる動作パラメータがシンボル毎に更新されない場合、等化兼偏波逆多重化器の典型的な追跡速度は、数10KHzであるが、それは、前述の非線形偏波散乱以外の何らかの要因により生じた光ファイバチャネル中の偏波変化を追跡するのに十分である。しかしながら、実際の運用では、ハードウェアの速度に限界があるため、等化兼偏波逆多重化器801には、一般的に並列構造が採用される(Pfau T.他、“Towards Real-Time Implementation of Coherent Optical Communication”、 paper OThj4、 Processing of OFC 2009)。並列構造では、偏波逆多重化器の動作パラメータは、シンボル毎に更新されるよりも、Nシンボル(Nは、並列構造中の並列チャネル数)毎に更新される。したがって、Nの値が大きいと、ハードウェアの処理速度に対する要求は低くなるが、等化兼偏波逆多重化器の追跡速度が遅くなり、その結果、受信機の性能に影響を与える。受信機の性能に影響を与えることなくハードウェアの処理速度に対する要求を抑えるために、並列構造の等化兼偏波逆多重化器を用いる受信機においては、等化兼偏波逆多重化器120´の並列構造に起因して追跡できない偏波変化は、本発明の実施形態に従った偏波散乱補償装置を用いて信号の偏波回復を実施することにより除去し得る。
【0063】
上述の装置の各々の構成モジュール、ユニット、およびサブユニット、ならびに上述の方法の各ステップもしくは処理は、ソフトウェア、ファームウェア、ハードウェア、またはそれらの組み合わせを通じて構成され得る。構成の具体的手段もしくは方法は、当業者に周知であり、ここでは説明を省略する。ソフトウェアまたはハードウェアを通じて実装される場合には、ソフトウェアを構成するプログラムは、記憶媒体もしくはネットワークから専用ハードウェア構造を有するコンピュータ(例えば、図12に示すような一般的なコンピュータ1200)またはシステムもしくは装置に組み込まれたコンピュータ(例えば、送信機)にインストールされる。コンピュータは、様々なプログラムがインストールされたときに各種機能を実行可能である。
【0064】
図12は、本発明の実施形態に従った方法および装置を実装可能なコンピュータの概略的なブロックダイアグラムである。
図12において、Central Processing Unit(CPU)1201は、Read Only Memory(ROM)1202に格納されたプログラムまたは格納部1208からRandom Access Memory(RAM)1203に読み出されたプログラムに従って各種処理を実行する。必要に応じて、RAM1203は、CPU1201により実行される各種処理に必要なデータをも格納する。CPU1201、ROM1202、およびRAM1203は、バス1204を介して相互に接続される。入出力インタフェース1205は、必要に応じてバス1204にも接続され得る。
【0065】
以下の部品は、必要に応じて入出力インタフェース1205に接続され得る:入力部1206(キーボードやマウス等を含む)、出力部1207(Cathode-Ray Tube(CRT)およびLiquid Crystal Display(LCD)等の表示装置やラウドスピーカを含む)、記憶部1208(ハードディスク等を含む)、および1209通信部(LANカードおよびモデム等のネットワークインタフェースカードを含む)。通信部1209は、例えば、インターネット等のネットワークを介した通信処理を実行する。必要に応じて、入出力インタフェース1205にはドライバ1205も接続される。磁気ディスク、光ディスク、光磁気ディスク、および半導体メモリ等の取り外し可能媒体1211は、それらから読み出したコンピュータプログラムを必要に応じて記憶部1208にインストールするために、必要に応じてドライバ1201に取り付けられ得る。コンピュータは、バス1204を介して接続されたCPU1201、ROM1202、およびRAM1203のみを有してもよい。
【0066】
上述の一連の処理がソフトウェアを通じて実行される場合には、ソフトウェアを構成するプログラムは、インターネット等のネットワークまたは取り外し可能媒体1211等の記憶媒体からインストールされる。
【0067】
記憶媒体が、図12に示したようなプログラムをユーザに提供する装置とは別にプログラムを記憶および配信する取り外し可能媒体1211に限定されないことは、当業者に明らかである。取り外し可能媒体1211の例としては、磁気ディスク(フロッピーディスク(登録商標)を含む)、光ディスク(Compact Disk Read Only Memory(CD−ROM)やDigital Versatile Disk(DVD)を含む)、光磁気ディスク(Mini Disk(MD)(登録商標)を含む)、および半導体メモリが挙げられる。あるいは、記憶媒体は、ROM1202または記憶部1208中に含まれるハードディスクであってよく、ROM1202または記憶部1208には、プログラムが含まれ、それらを含む装置と共にユーザにプログラムが提供される。
【0068】
本発明は、機械可読命令コードを格納するプログラムプロダクトをも提案する。機械(コンピュータ等)により命令コードが読み出され実行される場合に、本発明の実施形態に従った前述の方法が実行され得る。
【0069】
これに対応して、本発明の開示には、機械可読命令コードを格納するプログラムプロダクトを記憶する記憶媒体も含まれる。記憶媒体には、フロッピーディスク、光ディスク、光磁気ディスク、メモリカード、メモリスティック等が含まれるが、これらに限定されるものではない。
【0070】
付記1:送信機により送信され、第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを受信する受信機に用いられる偏波散乱補償装置であって、
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が送信されたときに送信機により同時に送信された前記第2の偏波状態の信号との時系列を整列する時系列整列部と、
前記時系列整列後の前記第1の偏波状態の信号および前記第2の偏波状態の信号について、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による散乱の散乱係数とを推定する偏波散乱推定部と、
前記偏波散乱推定部により推定された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とに従って、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱とを除去する偏波散乱除去部と
を含む偏波散乱補償装置。
付記2:前記時系列整列部は、
前記第1の偏波状態の信号を第1の所定シンボルの間遅延する第1の遅延レジスタと、
前記第2の偏波状態の信号を第2の所定シンボルの間遅延する第2の遅延レジスタと
を含む、付記1に記載の偏波散乱補償装置。
付記3:前記偏波散乱推定部は、
前記第1の偏波状態の信号上に変調されたデータを判定する第1のデータ判定部と、
前記第2の偏波状態の信号上に変調されたデータを判定する第2のデータ判定部と、
前記第1の偏波状態の信号と、前記第2の偏波状態の信号と、前記第1のデータ判定部により判定された前記データと、前記第2のデータ判定部により判定された前記データとに従って、各シンボル時点において、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とを計算する偏波散乱係数計算部と、
複数のシンボル時点における前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第1の平均化部と、
複数のシンボル時点における前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第2の平均化部と
を含む、付記1に記載の偏波散乱補償装置。
付記4:前記偏波散乱除去部は、
前記第2のデータ判定部により判定されたデータ値を前記第1の平均化部により取得された前記平均値と乗算する第1の乗算器と、
前記時系列整列後の前記第1の偏波状態の信号から前記第1の乗算器により取得された乗算結果を減算する第1の減算器と、
前記第1のデータ判定部により判定されたデータ値を前記第2の平均化部により取得された前記平均値と乗算する第2の乗算器と、
前記時系列整列後の前記第2の偏波状態の信号から前記第2の乗算器により取得された乗算結果を減算する第2の減算器と
を含む、付記3に記載の偏波散乱補償装置。
付記5:前記偏波散乱除去部は、
前記時系列整列後の前記第2の偏波状態の信号を前記第1の平均化部により取得された前記平均値と乗算する第1の乗算器と、
前記時系列整列後の前記第1の偏波状態の信号から前記第1の乗算器により取得された乗算結果を減算する第1の減算器と、
前記時系列整列後の前記第1の偏波状態の信号を前記第2の平均化部により取得された前記平均値と乗算する第2の乗算器と、
前記時系列整列後の前記第2の偏波状態の信号から前記第2の乗算器により取得された乗算結果を減算する第2の減算器と
を含む、付記3に記載の偏波散乱補償装置。
付記6:前記偏波散乱除去部は、
前記第1および第2の平均化部により取得された前記平均値に従って、前記第1および第2の偏波状態の信号間の偏波散乱行列の逆行列を決定する逆行列決定部と、
前記逆行列決定部により決定された逆行列を前記第1および第2の偏波状態の信号と乗算する乗算部と
を含む、付記3に記載の偏波散乱補償装置。
付記7:前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とを整列する第1の付加的時系列整列部と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第1の付加的散乱推定部と、
前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第1の付加的散乱推定部により推定された前記散乱係数に従って除去する第1の付加的散乱除去部と
をさらに含む、付記1に記載の偏波散乱補償装置。
付記8:前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とを整列する第2の付加的時系列整列部と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第2の付加的散乱推定部と、
前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第2の付加的散乱推定部により推定された前記散乱係数に従って除去する第2の付加的散乱除去部と
をさらに含む、付記1に記載の偏波散乱補償装置。
付記9:前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とを整列する第2の付加的時系列整列部と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第2の付加的散乱推定部と、
前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第2の付加的散乱推定部により推定された前記散乱係数に従って除去する第2の付加的散乱除去部と
をさらに含む、付記7に記載の偏波散乱補償装置。
付記10:前記時系列整列部は、前記第1の偏波状態の信号を第1の所定シンボルの間遅延する第1の遅延レジスタと、前記第2の偏波状態の信号を第2の所定シンボルの間遅延する第2の遅延レジスタとを含み、
前記第1の付加的時系列整列部は、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号を所定のシンボルの間遅延する第1の付加的遅延レジスタを含み、
前記第2の付加的時系列整列部は、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号を所定のシンボルの間遅延する第2の付加的遅延レジスタを含む、
付記9に記載の偏波散乱補償装置。
付記11:前記第1の付加的散乱除去部は、
前記第1の偏波状態の信号を1シンボル以上前方にシフトする第1の列前方シフト部と、
前記第1の列前方シフト部により前方にシフトされた前記第1の偏波状態の信号を、前記第1の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第1の付加的乗算部と、
前記第2の偏波状態の信号から前記第1の付加的乗算部により取得された乗算結果を減算する第1の付加的減算部と、
前記第2の偏波状態の信号を1シンボル以上後方にシフトする第1の列後方シフト部と、
前記第1の列後方シフト部により後方にシフトされた前記第2の偏波状態の信号を、前記第1の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第2の付加的乗算部と、
前記第1の偏波状態の信号から前記第2の付加的乗算部により取得された乗算結果を減算する第2の付加的減算部と
を含む、付記9に記載の偏波散乱補償装置。
付記12:前記第1の付加的散乱推定部は、前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とに対するデータ判定を実行し、前記第1の偏波状態の信号上に変調されたデータと前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上に変調されたデータとを取得して、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数とを推定し、
前記第1の付加的散乱除去部は、
前記第1の偏波状態の信号上に変調された前記データを1シンボル以上前方にシフトする第1の列前方シフト部と、
前記第1の列前方シフト部により前方にシフトされた前記第1の偏波状態の信号上に変調された前記データを、前記第1の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第1の付加的乗算部と、
前記第2の偏波状態の信号から前記第1の付加的乗算部により取得された乗算結果を減算する第1の付加的減算部と、
前記第2の偏波状態の信号上に変調された前記データを1シンボル以上後方にシフトする第2の列後方シフト部と、
前記第2の列後方シフト部により後方にシフトされた前記第2の偏波状態の信号上に変調された前記データを、前記第1の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第2の付加的乗算部と、
前記第1の偏波状態の信号から前記第2の付加的乗算部により取得された乗算結果を減算する第2の付加的減算部と
を含む、付記9に記載の偏波散乱補償装置。
付記13:前記第2の付加的散乱除去部は、
前記第1の偏波状態の信号を1シンボル以上後方にシフトする第2の列後方シフト部と、
前記第2の列後方シフト部により後方にシフトされた前記第1の偏波状態の信号を、前記第2の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第3の付加的乗算部と、
前記第2の偏波状態の信号から前記第3の付加的乗算部により取得された乗算結果を減算する第3の付加的減算部と、
前記第2の偏波状態の信号を1シンボル以上前方にシフトする第2の列前方シフト部と、
前記第2の列前方シフト部により前方にシフトされた前記第2の偏波状態の信号を、前記第1の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第4の付加的乗算部と、
前記第1の偏波状態の信号から前記第4の付加的乗算部により取得された乗算結果を減算する第4の付加的減算部と
を含む、付記11に記載の偏波散乱補償装置。
付記14:前記第2の付加的散乱推定部は、前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とに対するデータ判定を実行し、前記第1の偏波状態の信号上に変調されたデータと前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上に変調されたデータとを取得して、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数とを推定し、
前記第2の付加的散乱除去部は、
前記第1の偏波状態の信号上に変調された前記データを1シンボル以上後方にシフトする第2の列後方シフト部と、
前記第2の列後方シフト部により後方にシフトされた前記第1の偏波状態の信号上に変調された前記データを、前記第2の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第3の付加的乗算部と、
前記第2の偏波状態の信号から前記第1の付加的乗算部により取得された乗算結果を減算する第3の付加的減算部と、
前記第2の偏波状態の信号上に変調された前記データを1シンボル以上前方にシフトする第2の列前方シフト部と、
前記第2の列前方シフト部により前方にシフトされた前記第2の偏波状態の信号上に変調された前記データを、前記第2の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第4の付加的乗算部と、
前記第1の偏波状態の信号から前記第4の付加的乗算部により取得された乗算結果を減算する第4の付加的減算部と
を含む、付記11に記載の偏波散乱補償装置。
付記15:前記第1の列前方シフト部および前記第2の列後方シフト部は、相互に集積され、第1の遅延器および第1の3次遅延器から構成され、前記第1の遅延器は、前記時系列整列後の前記第1の偏波状態の信号を(D−2−m)シンボル周期の間遅延し、ここで、Dシンボル周期は、前記偏波散乱推定部により実行される偏波散乱推定に必要なシンボル周期であり、前記第1の3次遅延器は、前記第1の遅延器により遅延されている前記信号を1+mシンボル周期および3+mシンボル周期の間それぞれ遅延して、前記第1の偏波状態の信号を1シンボル以上後方にシフトし且つ前記第1の偏波状態の信号を1シンボル以上前方にシフトし、ここで、mは、1以上のシンボル数から1を減算することにより取得される値である、
付記13または14に記載の偏波散乱補償装置。
付記16:前記第1の列後方シフト部および前記第2の列前方シフト部は、相互に集積され、第2の遅延器および第2の3次遅延器から構成され、前記第2の遅延器は、前記時系列整列後の前記第2の偏波状態の信号を(D−2−m)シンボル周期の間遅延し、ここで、Dシンボル周期は、前記偏波散乱推定部により実行される偏波散乱推定に必要なシンボル周期であり、前記第2の3次遅延器は、前記第2の遅延器により遅延されている前記信号702を1+mシンボル周期および3+mシンボル周期の間それぞれ遅延して、前記第2の偏波状態の信号を1シンボル以上後方にシフトし且つ前記第2の偏波状態の信号を1シンボル以上前方にシフトし、ここで、mは、1以上のシンボル数から1を減算することにより取得される値である、
付記13または14に記載の偏波散乱補償装置。
付記17:H偏波状態位相回復器、V偏波状態位相回復器、H偏波状態データ回復器、およびV偏波状態データ回復器を含むコヒーレント受信機であって、付記1から16の何れかに記載の前記偏波散乱補償装置を含み、前記H偏波状態位相回復器および前記V偏波状態位相回復器から信号を受信し、前記H偏波状態データ回復器および前記V偏波状態データ回復器に信号を出力する、コヒーレント受信器。
付記18:前記コヒーレント受信機は、並列構造を有する低速等化兼偏波逆多重化器を用いる、付記17に記載のコヒーレント受信機。
付記19:送信機により送信され、第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを受信する受信機に用いられる偏波散乱補償方法であって、
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が送信されたときに送信機により同時に送信された前記第2の偏波状態の信号との時系列を整列する時系列整列処理と、
前記時系列整列後の前記第1の偏波状態の信号および前記第2の偏波状態の信号について、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による散乱の散乱係数とを推定する偏波散乱推定処理と、
前記偏波散乱推定処理により推定された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とに従って、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱とを除去する偏波散乱除去処理と
を含む偏波散乱補償方法。
付記20:前記偏波散乱推定処理は、
前記第1の偏波状態の信号上に変調されたデータを判定する第1のデータ判定処理と、
前記第2の偏波状態の信号上に変調されたデータを判定する第2のデータ判定処理と、
前記第1の偏波状態の信号と、前記第2の偏波状態の信号と、前記第1のデータ判定処理により判定された前記データと、前記第2のデータ判定処理により判定された前記データとに従って、各シンボル時点において、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とを計算する偏波散乱係数計算処理と、
複数のシンボル時点における前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第1の平均化処理と、
複数のシンボル時点における前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第2の平均化処理と
を含む、付記19に記載の偏波散乱補償方法。
付記21:前記偏波散乱除去処理は、
前記第2のデータ判定処理により判定されたデータ値を前記第1の平均化処理により取得された前記平均値と乗算する第1の乗算処理と、
前記時系列整列後の前記第1の偏波状態の信号から前記第1の乗算処理により取得された乗算結果を減算する第1の減算処理と、
前記第1のデータ判定処理により判定されたデータ値を前記第2の平均化処理により取得された前記平均値と乗算する第2の乗算処理と、
前記時系列整列後の前記第2の偏波状態の信号から前記第2の乗算処理により取得された乗算結果を減算する第2の減算処理と
を含む、付記20に記載の偏波散乱補償方法。
付記22:前記偏波散乱除去処理は、
前記時系列整列後の前記第2の偏波状態の信号を前記第1の平均化処理により取得された前記平均値と乗算する第1の乗算処理と、
前記時系列整列後の前記第1の偏波状態の信号から前記第1の乗算処理により取得された乗算結果を減算する第1の減算処理と、
前記時系列整列後の前記第1の偏波状態の信号を前記第2の平均化処理により取得された前記平均値と乗算する第2の乗算処理と、
前記時系列整列後の前記第2の偏波状態の信号から前記第2の乗算処理により取得された乗算結果を減算する第2の減算処理と
を含む、付記20に記載の偏波散乱補償方法。
付記23:前記偏波散乱除去処理は、
前記第1および第2の平均化処理により取得された前記平均値に従って、前記第1および第2の偏波状態の信号間の偏波散乱行列の逆行列を決定する逆行列決定処理と、
前記逆行列決定処理により決定された逆行列を前記第1および第2の偏波状態の信号と乗算する乗算処理と
を含む、付記20に記載の偏波散乱補償方法。
付記24:前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とを整列する第1の付加的時系列整列処理と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第1の付加的散乱推定処理と、
前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第1の付加的散乱推定処理により推定された前記散乱係数に従って除去する第1の付加的散乱除去処理と
をさらに含む、付記19に記載の偏波散乱補償方法。
付記25:前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とを整列する第2の付加的時系列整列処理と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第2の付加的散乱推定処理と、
前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第2の付加的散乱推定処理により推定された前記散乱係数に従って除去する第2の付加的散乱除去処理と
をさらに含む、付記19に記載の偏波散乱補償方法。
付記26:前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とを整列する第2の付加的時系列整列処理と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第2の付加的散乱推定処理と、
前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第2の付加的散乱推定処理により推定された前記散乱係数に従って除去する第2の付加的散乱除去処理と
をさらに含む、付記24に記載の偏波散乱補償方法。
付記27:前記時系列整列処理は、前記第1の偏波状態の信号を第1の所定シンボルの間遅延する第1の遅延記録処理と、前記第2の偏波状態の信号を第2の所定シンボルの間遅延する第2の遅延記録処理とを含み、
前記第1の付加的時系列整列処理は、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号を所定のシンボルの間遅延する第1の付加的遅延記録処理を含み、
前記第2の付加的時系列整列処理は、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号を所定のシンボルの間遅延する第2の付加的遅延記録処理を含む、
付記26に記載の偏波散乱補償方法。
付記28:前記第1の付加的散乱除去処理は、
前記第1の偏波状態の信号を1シンボル以上前方にシフトする第1の列前方シフト処理と、
前記第1の列前方シフト処理により前方にシフトされた前記第1の偏波状態の信号を、前記第1の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第1の付加的乗算処理と、
前記第2の偏波状態の信号から前記第1の付加的乗算処理により取得された乗算結果を減算する第1の付加的減算処理と、
前記第2の偏波状態の信号を1シンボル以上後方にシフトする第1の列後方シフト処理と、
前記第1の列後方シフト処理により後方にシフトされた前記第2の偏波状態の信号を、前記第1の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第2の付加的乗算処理と、
前記第1の偏波状態の信号から前記第2の付加的乗算処理により取得された乗算結果を減算する第2の付加的減算処理と
を含む、付記26に記載の偏波散乱補償方法。
付記29:前記第1の付加的散乱推定処理は、前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とに対するデータ判定を実行し、前記第1の偏波状態の信号上に変調されたデータと前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上に変調されたデータとを取得して、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数とを推定し、
前記第1の付加的散乱除去処理は、
前記第1の偏波状態の信号上に変調された前記データを1シンボル以上前方にシフトする第1の列前方シフト処理と、
前記第1の列前方シフト処理により前方にシフトされた前記第1の偏波状態の信号上に変調された前記データを、前記第1の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第1の付加的乗算処理と、
前記第2の偏波状態の信号から前記第1の付加的乗算処理により取得された乗算結果を減算する第1の付加的減算処理と、
前記第2の偏波状態の信号上に変調された前記データを1シンボル以上後方にシフトする第2の列後方シフト処理と、
前記第2の列後方シフト処理により後方にシフトされた前記第2の偏波状態の信号上に変調された前記データを、前記第1の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第2の付加的乗算処理と、
前記第1の偏波状態の信号から前記第2の付加的乗算処理により取得された乗算結果を減算する第2の付加的減算処理と
を含む、付記26に記載の偏波散乱補償方法。
付記30:前記第2の付加的散乱除去処理は、
前記第1の偏波状態の信号を1シンボル以上後方にシフトする第2の列後方シフト処理と、
前記第2の列後方シフト処理により後方にシフトされた前記第1の偏波状態の信号を、前記第2の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第3の付加的乗算処理と、
前記第2の偏波状態の信号から前記第3の付加的乗算処理により取得された乗算結果を減算する第3の付加的減算処理と、
前記第2の偏波状態の信号を1シンボル以上前方にシフトする第2の列前方シフト処理と、
前記第2の列前方シフト処理により前方にシフトされた前記第2の偏波状態の信号を、前記第1の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第4の付加的乗算処理と、
前記第1の偏波状態の信号から前記第4の付加的乗算処理により取得された乗算結果を減算する第4の付加的減算処理と
を含む、付記28に記載の偏波散乱補償方法。
付記31:前記第2の付加的散乱推定処理は、前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とに対するデータ判定を実行し、前記第1の偏波状態の信号上に変調されたデータと前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上に変調されたデータとを取得して、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数とを推定し、
前記第2の付加的散乱除去処理は、
前記第1の偏波状態の信号上に変調された前記データを1シンボル以上後方にシフトする第2の列後方シフト処理と、
前記第2の列後方シフト処理により後方にシフトされた前記第1の偏波状態の信号上に変調された前記データを、前記第2の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第3の付加的乗算処理と、
前記第2の偏波状態の信号から前記第1の付加的乗算処理により取得された乗算結果を減算する第3の付加的減算処理と、
前記第2の偏波状態の信号上に変調された前記データを1シンボル以上前方にシフトする第2の列前方シフト処理と、
前記第2の列前方シフト処理により前方にシフトされた前記第2の偏波状態の信号上に変調された前記データを、前記第2の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第4の付加的乗算処理と、
前記第1の偏波状態の信号から前記第4の付加的乗算処理により取得された乗算結果を減算する第4の付加的減算処理と
を含む、付記28に記載の偏波散乱補償方法。
【0071】
本発明の実施形態の上記記載において、ある実施形態について記述および/または図示された特徴は、他の実施形態の特徴と組み合わせまたは置き換えるために、1つ以上の他の実施形態において同一または同様に用いられ得ることに留意すべきである。
【0072】
本明細書では、用語「含む/構成する」もしくは「含み/構成し」は、特徴、要素、ステップ、もしくは組み立ての存在を指し、1つ以上の他の特徴、要素、ステップ、組み立て、もしくはそれらの組み合わせの存在または付加を排除するものではない。
【0073】
また、本発明の方法は、本明細書で記述したような時間的順序に従って実行されることに限定されず、他の時系列で、同時に、または独立して実行し得る。したがって、本明細書で記述した方法の実行順序は、本発明の技術的範囲を制限しない。
【技術分野】
【0001】
本発明は、概して光通信に関し、特に、光コヒーレント受信機に関する。
【背景技術】
【0002】
光通信システムの容量やフレキシビリティに対する要求が増加するにつれて、コヒーレント光通信技術が益々重要になっている。コヒーレント光通信においては、同じ帯域幅で送信レートを2倍にするために、送信信号は、通常、偏波多重化方法によって2つの光偏波状態に同時に変調される。受信側では、光コヒーレント受信機は、2つの偏波状態の信号を同時に受信し、それらをベースバンドのデジタル信号に変換し、デジタル領域における逆多重化技術を用いて2つの偏波状態の信号を分離し、各偏波状態の信号を順次処理する。上述の内容から、光コヒーレント受信機の性能は、2つの偏波状態の信号が十分に分離されるか否かということに非常に影響されることが分かる。現在、偏波逆多重化のためには適応フィルタが通常用いられる(Seb J. Savory他、”Digital filters for coherent optical receivers”、Optics Express、Vol.16、Issue 2、pp. 804-817参照)。
【0003】
図1は、デジタル偏波逆多重化装置が用いられた周知の光コヒーレント受信機を示す。図1において、光コヒーレント受信機の前部には、局部発振レーザ103、偏波ビームスプリッタ102および104、光90°ミキサ109、光電変換器(O/E)110−113、およびアナログ・デジタル変換器(ADC)114−117が含まれる。図1において、参照符号105−108は、ビームスプリット信号を指す。前方の機能は、受信された偏波多重化光信号101をベースバンド電気信号118および119に変換することである。チャネルの偏波状態回転および非線形効果等の影響を受けるため、ベースバンド電気信号118および119の各々には、2つの偏波状態中に変調された電気信号が混合する。そこで、等化兼偏波逆多重化器120には、相互がクロストークしない信号、すなわち、図示したH偏波状態信号125およびV偏波状態信号126が得られるように2つの偏波状態の信号を分離するために、ベースバンド電気信号118および119を等化および逆多重することが要求される。次に、H偏波状態位相回復器121、H偏波状態データ回復器123、V偏波状態位相回復期122、およびV偏波状態データ回復器124によって、信号の位相回復およびデータ回復がそれぞれ実行される。一般的には、等化兼偏波逆多重化器120は、適応フィルタによって実装され、そのコヒーレント調整には、一定係数アルゴリズム(Constant Modular Algorithm)、最小平均二乗誤差アルゴリズム(S.J. Savoy他、“Transmission of 42.8Gbit/s Polarization Multiplexed NRZ-QPSK over 6400km of Standard Fiber with no Optical Dispersion Compensation”、paper OTuA1、Proceedings of OFC 2007参照)等が適用され得る。これらのアルゴリズムには、H偏波状態信号125とV偏波状態信号126との間にクロストークが存在しないように、チャネルの状態変化に従ってフィルタのコヒーレントを調整するフィードバック構造が用いられる。
【0004】
現在の研究においては、チャネルの偏波状態の変化がKHz規模である場合、適用フィルタは、この規模での偏波状態の変化を追跡できることが示されている。しかしながら、様々な理由(例えば、チャネルの非線形効果)に起因して、チャネルの偏波状態の変化は、信号の伝送レートの規模、すなわち、GHz規模に達し得る。現在の適用フィルタは、そのような高速の偏波状態の変化を追跡できず、このため、未処理の偏波散乱の存在に起因して、出力されたH偏波状態信号125とV偏波状態信号126との間にクロストークが生じ得る(G. Charlet他、“Performance comparison of singly-polarized and polarization multiplexed at 10Gbaud under nonlinear impairments”、OThu8、proceeding of OFC 2008参照)。2つの偏波状態において、送信信号をShおよびSv、受信信号をRhおよびRvとし、その他の信号損失が理想的に補償されている仮定する。そうすると、2つの偏波状態の間に偏波散乱が存在しないケースでは、Rh=Sh+nhおよびRv=Sv+nv(nhおよびnvは、それぞれHおよびV偏波状態のノイズである)。2つの偏波状態の間に何らかの偏波散乱が存在するケースでは、Rh=WhhSh+WhvSv+nhおよびRv=WvvSh+WvhSv+nv(Whh、Wvv、Whv、およびWvhは、偏波散乱係数であり、1よりも小さい偏角を有するすべての複素数である)。上述の2つのケースを比較することによって、偏波散乱に起因して、一方の偏波状態信号が他方の偏波状態信号にクロストークし得ることや、2つの偏波状態中に変調された信号が相互に独立すると、2つの偏波状態信号間のクロストークが受信信号の信号対雑音比(SNR)を確実に減少させること、故に、受信機の性能に影響を与えることが分かる。
【0005】
したがって、信号のクロストークにより生じる光コヒーレント受信機の性能への影響を除去ないし削減できるように、急速な偏波散乱を処理するための新たな方法や装置が必要である。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、関連技術の限界に起因して生じる1つ以上の問題を解決し、少なくとも1つの有益な選択を提供できるように、関連技術について提案する。
【課題を解決するための手段】
【0007】
本発明の目的を実現するために、本発明は、以下の側面を提供する。
側面1:送信機により送信され、第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを受信する受信機に用いられる偏波散乱補償装置であって、
第1の偏波状態の信号と第1の偏波状態の信号が送信されるときに送信機により同時に送信された第2の偏波状態の信号との時系列を整列する時系列整列部と、
時系列整列後の第1の偏波状態および第2の偏波状態の信号について、第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数とを推定する偏波散乱推定部と、
偏波散乱推定部により推定された第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数とに従って、第2の偏波状態の信号上の第1の偏波状態の信号による散乱と第1の偏波状態の信号上の第2の偏波状態の信号による散乱とを除去する偏波散乱除去部と、
を含む偏波散乱補償装置。
【0008】
側面2:H偏波状態位相回復器と、V偏波状態位相回復器と、H偏波状態データ回復器と、V偏波状態データ回復器とを含むコヒーレント受信機であって、H偏波状態位相回復器およびV偏波状態位相回復器からの信号を受信し、H偏波状態データ回復器およびV偏波状態データ回復器に信号を出力する側面1に従った偏波散乱補償装置を含むコヒーレント受信機。
【0009】
側面3:送信機により送信され、第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを受信する受信機に用いられる偏波散乱補償方法であって、
第1の偏波状態の信号と第1の偏波状態の信号が送信されるときに送信機により同時に送信された第2の偏波状態の信号との時系列を整列する時系列整列処理と、
時系列整列後の第1の偏波状態および第2の偏波状態の信号について、第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数とを推定する偏波散乱推定処理と、
偏波散乱推定処理により推定された第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数とに従って、第2の偏波状態の信号上の第1の偏波状態の信号による散乱と第1の偏波状態の信号上の第2の偏波状態の信号による散乱とを除去する偏波散乱除去処理と、
を含む偏波散乱補償方法。
【発明の効果】
【0010】
本発明の実施形態に従った方法および装置は、2つの偏波状態間のクロストークを推定できるように、伝送リンクの各種要因により生じた高速の偏波変化を追跡して回復することができる。
【0011】
本発明のこれらの態様および特徴や更なる態様および特徴は、以下の記述や図面を参照しながら明らかにされ得る。その記述や図面には、本発明の原理を用い得る方法を示すために、本発明の具体的な実施形態が詳細に開示される。しかしながら、その範囲に応じて本発明が限定されると評価すべきではない。本発明は、添付の請求項の精神および範囲内の多数の変更、改良、および均等物を含み得る。
【0012】
一実施形態について記述および/または図示された特徴は、他の実施形態の特徴と組み合わせまたは置き換えるために、1つ以上の他の実施形態と同一または同様に用いられ得る。
【図面の簡単な説明】
【0013】
【図1】デジタル偏波逆多重化が用いられる周知の光コヒーレント受信機の概略図である。
【図2】本発明の実施形態に従った光コヒーレント受信機の概略図である。
【図3】本発明の実施形態に従った偏波散乱補償装置の概略図である。
【図4】本発明の実施形態に従った偏波散乱推定部の概略図である。
【図5A】本発明の実施形態に従った偏波散乱除去部の概略図である。
【図5B】本発明の別の実施形態に従った偏波散乱除去部の概略図である。
【図5C】本発明の更に別の実施形態に従った偏波散乱除去部の概略図である。
【図6】本発明の別の実施形態に従った偏波散乱補償装置の概略図である。
【図7】本発明の更に別の実施形態に従った偏波散乱除去部の概略図である。
【図8】本発明の実施形態に従った偏波散乱補償方法の概略的なフローチャートである。
【図9】本発明の実施形態に従った、時系列整列後の第1および第2の偏波状態の信号についてステップS802における偏波散乱係数の推定の概略的なフローチャートである。
【図10】本発明の実施形態に従った、ステップS803における対応する偏波散乱の除去の概略的なフローチャートである。
【図11】本発明の別の実施形態に従った光コヒーレント受信機の概略図である。
【図12】本発明の実施形態に従った方法、装置、ユニットを実装可能なコンピュータの概略的なブロック図である。
【発明を実施するための形態】
【0014】
本発明の例示的な実施形態を図面を参照しながら以下に記述する。明確かつ簡潔にするために、明細書には、実際の実施形態のすべての特徴が記載されているわけではない。しかしながら、実際の実施形態の何れかを開発する過程においては、開発者が具体的目標を実現するためには、実施形態の多くの具体的決定を策定しなければならないことは当然である。例えば、システムおよびサービスに関する一定条件が充足され、これらの一定条件は、実施形態によって異なり得る。また、開発は非常に複雑で時間がかかるが、開示によって得られる技術を熟知する技術者にとっては、その開発が単なる定型的な業務になることに注目すべきである。
【0015】
不必要な細部に起因して本発明が漠然となることを避けるために、図面には、本発明に従った解決法に密接に関連する装置の構造および/または処理ステップのみが図示され、密接に関連しないその他の細部が省略されていることに注意すべきである。
【0016】
本発明の実施形態の基本的な動作原理は、2つの偏波状態間のクロストークを除去できるように、逆多重化された信号間のクロストークに従って偏波散乱係数を推定し、推定された偏波散乱係数に従って信号の偏波回復を実行することである。
【0017】
本発明の実施形態を図面を参照しながら以下に詳述する。
図2は、本発明の実施形態に従った光コヒーレント受信機の概略図である。図1に示した関連技術の光コヒーレント受信機と比較すると、図2に示した本発明の実施形態に従った光コヒーレント受信機には、本発明の実施形態に従った偏波散乱補償装置200が追加されるだけであり、その他の部分は変更されない。偏波散乱補償装置200は、偏波逆多重化や位相回復がなされている信号127および128を受信し、それらの偏波散乱の回復を実行し、偏波散乱回復後の信号205および206をデータ回復装置(H偏波状態データ回復器123およびV偏波状態データ回復器124)に出力する。
【0018】
図3は、本発明の実施形態に従った偏波散乱補償装置200の概略図である。図3に示すように、本発明の実施形態に従った偏波散乱補償装置200は、時系列整列部300、偏波散乱推定部400、および偏波散乱除去部500を含む。
【0019】
一実施形態では、時系列整列部300は、遅延レジスタ301および302を含む。偏波散乱補償装置200の入力は、2つの偏波状態にある位相回復された信号127および128である。信号127および128は、Delay_HおよびDelay_Vシンボルとして遅延レジスタ301および302によりそれぞれ遅延される。遅延処理の目的は、送信側での時系列関係と一致する2つのチャネルの信号(H偏波状態信号およびV偏波状態信号)間の相対的な時系列関係を維持することである。すなわち、送信機により同時に送信されたH偏波状態信号およびV偏波状態信号の時系列は、時系列整列後に変更されずに維持される。Delay_HおよびDelay_Vの値は、受信機の上層の処理モジュール(例えば、フレーム処理モジュール)から取得され得る。遅延レジスタ301および302の出力201および202は、(図4を参照しながら後で詳述する)偏波散乱推定部400に入力される。偏波散乱推定部400は、2つのチャネルの信号の偏波散乱係数を推定し、それらを信号203および204として出力する。それらの内で、信号203は、H偏波状態信号上のV偏波状態信号の偏波散乱係数であり、信号204は、V偏波状態信号上のH偏波状態信号の偏波散乱係数である。(図5を参照しながら後で詳述する)偏波散乱除去部500は、受信した信号203および204を処理することによって偏波散乱回復を実行し、偏波散乱回復後の信号205および206を出力する。H偏波状態データ回復器123およびV偏波状態データ回復器124は、信号205および信号206に従ってデータをそれぞれ回復する。2つの偏波状態の信号の時系列は、上述の2つの遅延レジスタを用いて整列されるが、当然のことながら、当業者によれば2つの偏波状態の信号の時系列が単に1つの遅延レジスタを用いて整列され得ることに留意すべきである。
【0020】
図4は、本発明の実施形態に従った偏波散乱推定部400の概略図である。図4に示すように、偏波散乱推定部400の入力は、時系列が整列された信号201および202、すなわち、H偏波状態信号RhおよびV偏波状態信号Rvである。信号201および202に従って、データ判定器401および402は、2つの偏波状態の信号上に変調されたデータ403および404(判定データ、すなわち、
および
)をそれぞれ推定する。データ判定器401および402は、ソフト判定やハード判定等の現在ないし今後当業者に周知の任意の技術的方法でデータ判定を実行し得る。
【0021】
判定データ403および404と信号201および202とは、偏波散乱係数推定部405に一緒に入力され、偏波散乱係数推定部405は、2つの偏波状態の信号および判定データに従って、各シンボル時点での偏波散乱係数、すなわち、H偏波状態信号上のV偏波状態信号の散乱係数WhvおよびV偏波状態信号上のH偏波状態信号の散乱係数Wvhを計算する。一実施形態では、これらの散乱係数は、次の数式で推定され得る。
【数1】
【数2】
【0022】
各シンボル時点でのWhvおよびWvhは、信号406および407としてそれぞれ出力される。次に、ノイズの影響を除去するために、アベレージャ408および409によってそれらはそれぞれ平均化される。平均化されるWhvおよびWvhの数は、必要に応じて決定され得る。アベレージャ408および409の出力信号203および204は、推定された偏波散乱係数である。
【0023】
図5Aは、本発明の実施形態に従った偏波散乱除去部の概略図である。2つの偏波状態の変調信号をShおよびSvとする(例えば、QPSKについては、
【数3】
であり、
【数4】
であり、ここで、
および
の何れかは、π/4、3π/4、5π/4、または7π/4である)。一般的に、RhおよびRvは、ShおよびSvを用いて次のように表される。
【数5】
【0024】
RhおよびRvは、適用フィルタにより実行される偏波逆多重化を通じて取得される信号であり、WhhおよびWvvの和が1とおおよそ等しいと共に、|Wvh|および|Whv|が共に1よりはるかに小さいと仮定し得る。したがって、(Rh,Rv)と(Sh,Sv)との関係は、次のように簡約し得る。
【数6】
【0025】
上述の関係に従い、偏波散乱行列は、本発明の実施形態に従った偏波散乱推定部により偏波散乱係数WhvおよびWvhが決定された時点で決定され得る。偏波散乱除去部は、次式に示されるように、受信信号に関する偏波散乱行列についての逆算を単に実行することによって偏波回復を実現できる。
【数7】
【0026】
図5に示したような本発明の実施形態に従った偏波散乱除去部は、受信したRhおよびRvと偏波散乱行列の逆行列を直接乗算することによって偏波散乱を除去する。
【0027】
具体的には、図5Aに示すように、偏波散乱除去部500は、偏波散乱係数WhvおよびWvhに従って2つの偏波状態の信号間の偏波散乱行列の逆行列を計算するよう構成された逆行列計算部501と、2つの偏波状態の信号間の偏波散乱行列の計算された逆行列と信号RhおよびRvを乗算するよう構成された乗算器502とを含む。
【0028】
図5Aの偏波散乱除去部は、受信信号を偏波散乱行列の逆行列と乗算することによって2つの偏波状態の偏波回復信号を取得し、それらを偏波散乱回復信号205および206として出力する。
【0029】
図5Bは、本発明の別の実施形態に従った偏波散乱除去部の概略図である。図5は、本発明の偏波散乱除去部の第2の実施を示す。この実施では、偏波散乱推定部のデータ判定部により判定されたデータ
および
が送信データShおよびSvであると仮定する。したがって、2つの偏波状態の信号間の散乱量505および506は、乗算器503および504を通じて
をWhvと乗算し、
をWhvと乗算することによりそれぞれ取得される。次に、減算器507および508を通じて受信信号から散乱量を減算することによって、偏波回復が実現される。
【0030】
図5Cは、本発明の更に別の実施形態に従った偏波散乱除去部の概略図である。図5Cは、本発明の偏波散乱除去部の第3の実施を示す。この実施では、図5Aに示した第1の実施の簡易化とみなし得る。前述したように、|Wvh|および|Whv|は共に1よりはるかに小さく、故に、|Whv*Wvh|は1よりはるかに小さく、次のように、偏波散乱行列の逆行列中のWhv*Wvhを省くことによって、簡易化された偏波散乱除去方法が得られる。
【数8】
【0031】
本発明の実施形態の偏波散乱除去部の第3の実施は、これに基づいて単に簡易化された方法である。図5Cに示したように、2つの偏波状態の信号間の散乱量511および512は、乗算器409および410を通じて受信信号RvおよびRhをWhvおよびWvhと乗算することによってそれぞれ取得される。次に、減算器513および514を通じて受信信号から対応する偏波散乱量を減算することによって、偏波回復は実現される。
【0032】
図6は、本発明の別の実施形態に従った偏波散乱補償装置200´の概略図である。
具体的には、図6に示すように、偏波散乱補償装置200´は、時系列整列部300´、偏波散乱推定部400´、および偏波散乱除去部500´を含む。
【0033】
時系列整列部300´は、第1の遅延レジスタ601、第2の遅延レジスタ602、第3の遅延レジスタ603、および第4の遅延レジスタ604を含む。
【0034】
第1の遅延レジスタ601および第4の遅延レジスタ604は、送信側により同時に送信された2つの偏波状態の信号RhおよびRvの時系列を整列するよう構成された本発明の実施形態に従った時系列整列サブユニットに対応する。第2の遅延レジスタ602および第4の遅延レジスタ604は、送信側により同時に送信された2つの偏波状態の信号RhおよびRvの内の1つ(例えば、V偏波状態信号Rv)と、2つの偏波状態の信号RhおよびRvの内の他の1つ(例えば、H偏波状態信号Rh)の数シンボル周期(例えば、図6に示すように1シンボル)前の信号Rh´との時系列を整列するよう構成された本発明の実施形態に従った第1の付加的時系列整列部に対応する。第3の遅延レジスタ603および第4の遅延レジスタ604は、送信側により同時に送信された2つの偏波状態の信号RhおよびRvの内の1つ(例えば、V偏波状態信号Rv)と、2つの偏波状態の信号RhおよびRvの内の他の1つ(例えば、H偏波状態信号Rh)の数シンボル周期(例えば、1シンボル)後の信号Rh´´との時系列を整列するよう構成された本発明の実施形態に従った第2の付加的時系列整列部を構成する。
【0035】
2つの偏波状態の信号の時系列は、上述では、4つの遅延レジスタを用いて整列されるが、2つの偏波状態の信号の時系列が3つ、5つ、または6つの遅延レジスタを用いて整列され得ることは当業者にとって当然であることに留意すべきである。6つの遅延レジスタが用いられるケースでは、時系列整列部、第1の付加的時系列整列部、および第2の付加的時系列整列部は、2つの遅延レジスタを用いてそれぞれ実現され得る。
【0036】
偏波散乱推定サブユニット609、第1の付加的偏波散乱推定サブユニット610、および第2の付加的偏波散乱推定サブユニット611は、図4を参照して前述した偏波散乱推定部の構造に採り入れられ得る。
【0037】
そこで、偏波散乱推定サブユニット609は、送信側により同時に送信された2つの偏波状態の信号の散乱係数を推定する。第1の付加的偏波散乱推定サブユニット610および第2の付加的偏波散乱推定サブユニット611は、一方の偏波状態の信号とその信号より1シンボル周期前の他方の偏波状態の信号との間の散乱係数、および一方の偏波状態の信号とその信号より1シンボル周期後の他方の偏波状態の信号との間の散乱係数をそれぞれ推定する。図6に示したように、偏波散乱推定サブユニット609の出力612および613は、同時に送信されたHおよびV偏波状態信号間の偏波散乱係数Whv(t)およびWvh(t)である。第1の付加的偏波散乱推定サブユニット610の出力614および615は、V偏波状態信号と1シンボル前に送信されたH偏波状態信号との間の偏波散乱係数Whv(t−T)およびWvh(t−T)である。第2の付加的偏波散乱推定サブユニット611の出力616および617は、V偏波状態信号と1シンボル後に送信されたH偏波状態信号との間の偏波散乱係数Whv(t+T)およびWvh(t+T)である。3つの偏波散乱推定手段の出力および時系列が整列された受信信号RhおよびRvは、偏波散乱除去部500´にすべて入力される。
【0038】
偏波散乱除去部500´は、偏波散乱除去サブユニット618、第1の付加的偏波散乱除去サブユニット619、および第2の付加的偏波散乱除去サブユニット620を含む。偏波散乱除去サブユニット618は、偏波散乱推定サブユニット609により取得された散乱係数に従って、送信側により同時に送信された2つの偏波状態の信号間の散乱を除去するように構成される。第1の付加的偏波散乱除去サブユニット619は、第1の付加的偏波散乱推定サブユニット610により取得された散乱係数に従って、一方の偏波状態の信号と1シンボル周期以上前の他方の偏波状態の信号との間の散乱を除去するように構成される。第2の付加的偏波散乱除去サブユニット620は、第2の付加的偏波散乱推定サブユニット611により取得された散乱係数に従って、一方の偏波状態の信号と1シンボル周期以上後の他方の偏波状態の信号との間の散乱を除去するように構成される。
【0039】
偏波散乱除去部500´では、現時点における他方の偏波状態の信号からの隣接シンボル間の散乱がまず算出され得、次に、H偏波状態信号RhからV偏波状態信号の散乱を減算し且つV偏波状態信号RvからH偏波状態信号の散乱を減算することによって、偏波回復が実現される。例えば、図5Cに対応する方法が実施された場合、時点tにおいて、H偏波状態信号についてV偏波状態信号からの散乱は、Whv(t)Rv(t)+Whv(t+T)Rv(t−T)+Whv(t−T)Rv(t+T)であり、V偏波状態信号についてH偏波状態信号からの散乱は、Wvh(t)Rh(t)+Wvh(t+T)Rh(t+T)+Wvh(t−T)Rh(t−T)である。
【0040】
そして、このとき、第1の付加的偏波散乱除去サブユニット619は、上記式中の第3項をそれぞれ計算および除去し得、すなわち、第1の偏波状態の信号が送信機により送信される1シンボル以上前の時点で送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱を除去し得、第1の偏波状態の信号が送信機により送信される1シンボル以上前の時点で送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱を除去し得る。第2の付加的偏波散乱除去サブユニット620は、上記式中の第2項をそれぞれ計算および除去し得、すなわち、第1の偏波状態の信号が送信機により送信された1シンボル以上後の時点で送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱を除去し得、第1の偏波状態の信号が送信機により送信された1シンボル以上後の時点で送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱を除去し得る。第2の偏波散乱除去サブユニット620は、上記式中の第1項をそれぞれ計算および除去し得る。
【0041】
図6に示した実施形態では、V偏波状態信号と1シンボル周期前に送信されたH偏波状態信号との間の散乱係数Whv(t−T)およびWvh(t−T)、ならびにV偏波状態信号と1シンボル周期後に送信されたH偏波状態信号との間の散乱係数Whv(t+T)およびWvh(t+T)は、送信機により同時に送信されたHおよびV偏波状態信号間の散乱係数Whv(t)およびWvh(t)を基に付加的に計算されるが、本発明がこれに限定されないことに留意すべきである。本発明の別の実施形態では、V偏波状態信号と1シンボル周期前に送信されたH偏波状態信号との間の散乱係数Whv(t−T)およびWvh(t−T)が単に計算されてもよい。その場合、V偏波状態信号上のH偏波状態信号による散乱は、Wvh(t)Rh(t)+Whv(t−T)Rh(t−T)であると共に、計算されるH偏波状態信号上のV偏波状態信号による散乱は、Whv(t)Rv(t)+Whv(t−T)Rv(t+T)である。また、V偏波状態信号と1シンボル周期後に送信されたH偏波状態信号との間の散乱係数Whv(t+T)およびWvh(t+T)が単に計算されてもよい。その場合、V偏波状態信号上のH偏波状態信号による散乱は、Wvh(t)Rh(t)+Wvh(t+T)Rh(t+T)であると共に、計算されるH偏波状態信号上のV偏波状態信号による散乱は、Whv(t)Rv(t)+Whv(t+T)Rv(t−T)である。
【0042】
図7は、本発明の実施形態に従った偏波散乱除去部500´の概略図である。図7に示すように、偏波散乱除去部500´には、信号列Rh(t)およびRv(t)(RhおよびRvとも記される)がそれぞれ入力される。また、偏波散乱推定サブユニット609−611の出力も偏波散乱除去部500´に入力される。偏波散乱除去部500´は、Rh入力遅延器701および3次遅延レジスタ702を含む。遅延器701は、(D−2)シンボル周期Rhを遅延し、ここで、Dシンボル周期は、前部の偏波散乱推定に要する計算時間であり、そして、3次遅延レジスタ702の出力は、それぞれ、推定された偏波散乱係数と同期するRh(t−T)、Rh(t)、およびRh(t+T)である。Rh(t+T)は、次の時点におけるH偏波状態信号からのV偏波状態信号上の散乱を取得するために、入力された偏波散乱係数Wvh(t+T)と、乗算器704において乗算される。Rh(t−T)は、前の時点におけるH偏波状態信号からのV偏波状態信号上の散乱を取得するために、入力された偏波散乱係数Wvh(t−T)と、乗算器703において乗算される。Rh(t)は、同時に送信されたH偏波状態信号からのV偏波状態信号上の散乱を取得するために、入力された偏波散乱係数Wvh(t)と、乗算器705において乗算される。3つの散乱は、H偏波状態信号の3つの隣接シンボルからのV偏波状態信号上の散乱を取得するために、加算器706において加算される。V偏波状態信号の偏波回復は、減算器714を通じて、Rv(t)から散乱を減算することにより実現される。
【0043】
同様に、Rvは、遅延器707、ならびにRv(t−T)、Rv(t)、およびRv(t+T)を取得するための3次遅延レジスタ708により処理さる。Rv(t+T)は、次のシンボル時点におけるV偏波状態信号からのH偏波状態信号上の散乱を取得するために、入力された偏波散乱係数Whv(t−T)と、乗算器709において乗算される。Rv(t−T)は、前の時点におけるV偏波状態信号からのH偏波状態信号上の散乱を取得するために、入力された偏波散乱係数Whv(t+T)と、乗算器710において乗算される。Rv(t)は、同時に送信されたV偏波状態信号からのH偏波状態信号上の散乱を取得するために、入力された偏波散乱係数Whv(t)と、乗算器711において乗算される。3つの散乱は、V偏波状態信号の3つの隣接シンボルからのH偏波状態信号上の散乱を取得するために、加算器712において加算される。H偏波状態信号の偏波回復は、減算器713を通じて、Rh(t)から散乱を減算することにより実現される。
【0044】
図7の加算器706および減算器714は、3つの減算器に置き換えてもよく、3つの減算器の集積とみなし得ることは明らかである。加算器712および減算器713もまた、3つの減算器に置き換えてよく、3つの減算器の集積とみなし得る。
【0045】
図7において、遅延器701、702、707、および708、乗算器703および減算器714、ならびに乗算器709および減算器713は、第1の付加的散乱除去部に対応し、遅延器701、702、707、および708、乗算器704および減算器714、ならびに乗算器710および減算器713は、第2の付加的散乱除去器に対応する。
【0046】
また、本発明の別の実施形態に従えば、RvおよびRhを列中の前方または後方にシフトするよりも、
および
を列中の前方または後方にシフトして、対応する偏波散乱係数と乗算し得る。この技術的解決方法は、図5Bおよび図7を参照することによってより理解することができ、ここでは説明を省略する。
【0047】
図7は、図6の偏波散乱除去部500´の一実施形態を図示しただけであり、当業者であれば、記述に基づいて、本発明の範囲内に含まれる他の実施形態を想到することは可能である。
【0048】
また、図6−図7には、図5Cと比較して第1および第2の付加的偏波散乱除去サブユニットが追加されているが、当業者であれば、第1および第2の付加的偏波散乱除去サブユニットの内の1つのみを追加し得ることは当然である。
【0049】
図6の偏波散乱補償装置200´は、一方の偏波状態の信号上における他方の偏波状態の信号の複数シンボルからの偏波散乱を推定および除去することによって、偏波散乱を補償し、これにより、図3の偏波散乱補償装置200よりも理想的に偏波回復を達成する。
【0050】
また、図6では、一例として3次(すなわち、一方の偏波状態の信号の時系列と、前のシンボル時点、同時、および次のシンボル時点における他方の偏波状態の信号の時系列とをそれぞれ整列し、対応する偏波散乱係数を計算し、偏波散乱を除去する)を採るが、性能上の必要性に応じて、より複雑なハードウェアとより大きな処理負荷というコストを伴うより高次(すなわち、一方の偏波状態の信号の時系列と、更なるシンボル時点における他方の偏波状態の信号の時系列とを整列し、対応する偏波散乱係数を計算し、偏波散乱を除去する)を図6に用いてもよい。
【0051】
上述から理解できるように、本発明の実施形態に従った偏波回復装置には、偏波散乱係数を直接推定し、その係数に基づいて偏波散乱を修正する偏波散乱補償装置が用いられ、これによって、偏波回復の追跡速度が大幅に改善されるのに対し、従来技術では、偏波回復後の出力と理想的な出力との間のエラーに基づいて偏波回復の動作パラメータが調整される点で、本発明の偏波回復装置は、適応フィルタに基づく従来の偏波回復とは主に異なる。
【0052】
図8は、本発明の別の実施形態に従った偏波散乱補償方法の概略図である。偏波散乱補償方法は、送信機により送信され、且つ第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを受信する受信機に用いられる。図8に示すように、本発明の実施形態に従った偏波散乱補償方法では、まず、ステップS801において、2つの偏波状態にある信号の時系列を整列し、次に、ステップS802において、一方の偏波状態の信号による他方の偏波状態の信号上の散乱の散乱係数と、一方の偏波状態の信号上の他方の偏波状態の信号による散乱の散乱係数とを推定し、ステップS803において、一方の偏波状態の信号による他方の偏波状態の信号上の散乱と、一方の偏波状態の信号上の他方の偏波状態の信号による散乱とをステップS802で獲得された偏波散乱係数に基づき除去する。
【0053】
具体的には、一実施形態では、ステップS801において、第1の偏波状態の信号(例えば、H偏波状態信号)と、第1の偏波状態の信号が送信機により送信されたときに同時に送信された第2の偏波状態の信号(例えば、V偏波状態信号)との時系列を時系列整列部が整列する。次に、ステップS802において、時系列整列後の第1および第2の偏波状態の信号について、第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数Wvhと、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数Whvとを偏波散乱推定部が推定する。最後に、ステップS803において、偏波散乱推定部により推定された第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数とに従って、第2の偏波状態の信号上の第1の偏波状態の信号による散乱と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱とを偏波散乱除去部が除去する。
【0054】
別の実施形態では、ステップS801において、時系列整列部は、第1の偏波状態の信号(例えば、H偏波状態信号)と、第1の偏波状態の信号が送信機により送信されたときに同時に送信された第2の偏波状態の信号(例えば、V偏波状態信号)との時系列を整列するのみならず、第1の偏波状態の信号(例えば、H偏波状態信号)と、第1の偏波状態の信号が送信機により送信された1シンボル以上後のシンボル時点で送信された第2の偏波状態の信号(例えば、V偏波状態信号)との時系列を整列する。次に、ステップS802において、偏波散乱推定部は、時系列整列後の第1および第2の偏波状態の信号について、第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数Wvh(t)と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数Whv(t)とを推定する。また、偏波散乱推定部は、時系列整列後の第1の偏波状態の信号と、第1の偏波状態の信号が送信機により送信された1シンボル以上後のシンボル時点で送信された第2の偏波状態の信号とについて、第1の偏波状態の信号が送信機により送信機により送信された1シンボル以上後のシンボル時点で送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数Wvh(t+T)と、第1の偏波状態の信号が送信機により送信された1シンボル以上後のシンボル時点で送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱の散乱係数Whv(t+T)とをも推定する。最後に、ステップS803において、偏波散乱除去部は、第1の偏波状態の信号が送信されたときに同時に送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱と、第1の偏波状態の信号が送信されたときに同時に送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱と、第1の偏波状態の信号が送信された1シンボル以上後のシンボル時点で送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱と、第1の偏波状態の信号が送信された1シンボル以上後のシンボル時点で送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱とを、偏波散乱推定部により推定された第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数と、Wvh(t+T)およびWhv(t+T)とに従って除去する。
【0055】
さらに別の実施形態では、ステップS801において、時系列整列部は、第1の偏波状態の信号(例えば、H偏波状態信号)と、第1の偏波状態の信号が送信機により送信されたときに同時に送信された第2の偏波状態の信号(例えば、V偏波状態信号)との時系列を整列するのみならず、第1の偏波状態の信号と、第1の偏波状態の信号が送信機により送信される1シンボル以上前のシンボル時点で送信された第2の偏波状態の信号との時系列を整列する。次に、ステップS802において、偏波散乱推定部は、時系列整列後の第1および第2の偏波状態の信号について、第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数Wvh(t)と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数Whv(t)とを推定する。また、偏波散乱推定部は、時系列整列後の第1の偏波状態の信号と、第1の偏波状態の信号が送信機により送信機により送信される1シンボル以上前のシンボル時点で送信された第2の偏波状態の信号とについて、第1の偏波状態の信号が送信機により送信される1シンボル以上前のシンボル時点で送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数Wvh(t−T)と、第1の偏波状態の信号が送信機により送信される1シンボル以上前のシンボル時点で送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱の散乱係数Whv(t−T)とをも推定する。最後に、ステップS803において、偏波散乱除去部は、第1の偏波状態の信号が送信されたときに同時に送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱と、第1の偏波状態の信号が送信されたときに同時に送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱と、第1の偏波状態の信号が送信される1シンボル以上前のシンボル時点で送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱と、第1の偏波状態の信号が送信される1シンボル以上前のシンボル時点で送信された第2の偏波状態の信号による第1の偏波状態の信号上の散乱とを、偏波散乱推定部により推定された第2の偏波状態の信号上の第1の偏波状態の信号による散乱の散乱係数と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱の散乱係数と、Wvh(t−T)およびWhv(t−T)とに従って除去する。
【0056】
更なる実施形態では、ステップS801において、時系列整列部は、第1の偏波状態の信号(例えば、H偏波状態信号)と、第1の偏波状態の信号が送信機により送信されたときに同時に送信された第2の偏波状態の信号(例えば、V偏波状態信号)との時系列を整列するのみならず、第1の偏波状態の信号と、第1の偏波状態の信号が送信機により送信される1シンボル以上前のシンボル時点で送信された第2の偏波状態の信号との時系列を整列する。また、時系列整列部は、第1の偏波状態の信号と、第1の偏波状態の信号が送信機により送信された1シンボル以上後のシンボル時点で送信機により送信された第2の偏波状態の信号との時系列を整列する。次に、ステップS802において、偏波散乱推定部は、散乱係数Wvh(t)、Whv(t)、Wvh(t−T)、Whv(t−T)、Wvh(t+T)、およびWhv(t+T)を推定する。最後に、ステップS803において、偏波散乱除去部は、第2の偏波状態の信号上の第1の偏波状態の信号による散乱と、第1の偏波状態の信号上の第2の偏波状態の信号による散乱とを、散乱係数Wvh(t)、Whv(t)、Wvh(t−T)、Whv(t−T)、Wvh(t+T)、およびWhv(t+T)に従って除去する。
【0057】
図9は、本発明の実施形態に従った、時系列の整列(例えば、第1の偏波状態の信号Rhと、第1の偏波状態の信号Rhが送信されたときに同時に送信された信号Rvとの時系列の整列、第1の偏波状態の信号Rhと、第1の偏波状態の信号Rhが送信された1シンボル後のシンボル時点で送信された信号Rv+1との時系列の整列、または第1の偏波状態の信号Rhと、第1の偏波状態の信号Rhが送信される1シンボル前のシンボル時点で送信された信号Rv−1との時系列の整列)後の第1および第2の偏波状態の信号についてステップS802で偏波散乱係数を推定する概略的フローチャートである。
【0058】
図9に示すように、本発明の実施形態に従えば、まずステップS901において、第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを判定するデータ判定が行なわれる。次に、ステップS902において、第1の偏波状態の信号上に変調されたデータ、第2の偏波状態の信号上に変調されたデータ、第1の偏波状態の信号、および第2の偏波状態の信号に従って、各シンボル時点での第2の偏波状態の信号上の第1の偏波状態の信号による偏波散乱の偏波散乱係数と、第1の偏波状態の信号上の第2の偏波状態の信号による偏波散乱の偏波散乱係数とを決定する。最後に、ステップS903において、複数のシンボル時点における第2の偏波状態の信号上の第1の偏波状態の信号による偏波散乱の偏波散乱係数を平均し、複数のシンボル時点における第1の偏波状態の信号上の第2の偏波状態の信号による偏波散乱の偏波散乱係数を平均する。
【0059】
図10は、本発明の実施形態に従った、ステップS803において対応する偏波散乱を除去する概略的フローチャートである。
図10に示すように、まずステップS1001において、乗算を実行し、例えば、第1の偏波状態の信号が送信されたときに同時に送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱を除去する場合に、第1の偏波状態の信号またはその上に変調されたデータを第2の偏波状態の信号上の第1の偏波状態の信号による偏波散乱の偏波散乱係数と乗算する。次に、ステップS1002において、減算を実行し、例えば、第1の偏波状態の信号が送信されたときに同時に送信された第2の偏波状態の信号上の第1の偏波状態の信号による散乱を除去する場合に、第2の偏波状態の信号からステップS1001により取得された乗算結果を減算する。
【0060】
ステップS803において、図10のS1002およびS1002の各ステップを数回実行でき、これらのステップを並行して実行し得ることは明らかである。
図10の乗算および減算のステップは、第1の偏波状態の信号が送信されたときに同時に送信された第2の偏波状態の信号上の第1の偏波状態の信号による偏波散乱を除去する例を通じて上述されている。その他の偏波散乱の除去、例えば、第1の偏波状態の信号が送信される1シンボル以上前または後の時点で送信された第2の偏波状態の信号上の第1の偏波状態の信号による偏波散乱等の除去については、実行される乗算および減算についての図5A−図7の偏波散乱除去部の記述を参照されたく、ここでは説明を省略する。
【0061】
図11は、本発明の別の実施形態に従った光コヒーレント受信機の概略図である。図11に示すように、光コヒーレント受信機は、図2の等化兼偏波逆多重化器が図11の低速等化兼偏波多重化器120´に置き換えられている点で異なる。
【0062】
偏波逆多重化に用いられる動作パラメータがシンボル毎に更新されない場合、等化兼偏波逆多重化器の典型的な追跡速度は、数10KHzであるが、それは、前述の非線形偏波散乱以外の何らかの要因により生じた光ファイバチャネル中の偏波変化を追跡するのに十分である。しかしながら、実際の運用では、ハードウェアの速度に限界があるため、等化兼偏波逆多重化器801には、一般的に並列構造が採用される(Pfau T.他、“Towards Real-Time Implementation of Coherent Optical Communication”、 paper OThj4、 Processing of OFC 2009)。並列構造では、偏波逆多重化器の動作パラメータは、シンボル毎に更新されるよりも、Nシンボル(Nは、並列構造中の並列チャネル数)毎に更新される。したがって、Nの値が大きいと、ハードウェアの処理速度に対する要求は低くなるが、等化兼偏波逆多重化器の追跡速度が遅くなり、その結果、受信機の性能に影響を与える。受信機の性能に影響を与えることなくハードウェアの処理速度に対する要求を抑えるために、並列構造の等化兼偏波逆多重化器を用いる受信機においては、等化兼偏波逆多重化器120´の並列構造に起因して追跡できない偏波変化は、本発明の実施形態に従った偏波散乱補償装置を用いて信号の偏波回復を実施することにより除去し得る。
【0063】
上述の装置の各々の構成モジュール、ユニット、およびサブユニット、ならびに上述の方法の各ステップもしくは処理は、ソフトウェア、ファームウェア、ハードウェア、またはそれらの組み合わせを通じて構成され得る。構成の具体的手段もしくは方法は、当業者に周知であり、ここでは説明を省略する。ソフトウェアまたはハードウェアを通じて実装される場合には、ソフトウェアを構成するプログラムは、記憶媒体もしくはネットワークから専用ハードウェア構造を有するコンピュータ(例えば、図12に示すような一般的なコンピュータ1200)またはシステムもしくは装置に組み込まれたコンピュータ(例えば、送信機)にインストールされる。コンピュータは、様々なプログラムがインストールされたときに各種機能を実行可能である。
【0064】
図12は、本発明の実施形態に従った方法および装置を実装可能なコンピュータの概略的なブロックダイアグラムである。
図12において、Central Processing Unit(CPU)1201は、Read Only Memory(ROM)1202に格納されたプログラムまたは格納部1208からRandom Access Memory(RAM)1203に読み出されたプログラムに従って各種処理を実行する。必要に応じて、RAM1203は、CPU1201により実行される各種処理に必要なデータをも格納する。CPU1201、ROM1202、およびRAM1203は、バス1204を介して相互に接続される。入出力インタフェース1205は、必要に応じてバス1204にも接続され得る。
【0065】
以下の部品は、必要に応じて入出力インタフェース1205に接続され得る:入力部1206(キーボードやマウス等を含む)、出力部1207(Cathode-Ray Tube(CRT)およびLiquid Crystal Display(LCD)等の表示装置やラウドスピーカを含む)、記憶部1208(ハードディスク等を含む)、および1209通信部(LANカードおよびモデム等のネットワークインタフェースカードを含む)。通信部1209は、例えば、インターネット等のネットワークを介した通信処理を実行する。必要に応じて、入出力インタフェース1205にはドライバ1205も接続される。磁気ディスク、光ディスク、光磁気ディスク、および半導体メモリ等の取り外し可能媒体1211は、それらから読み出したコンピュータプログラムを必要に応じて記憶部1208にインストールするために、必要に応じてドライバ1201に取り付けられ得る。コンピュータは、バス1204を介して接続されたCPU1201、ROM1202、およびRAM1203のみを有してもよい。
【0066】
上述の一連の処理がソフトウェアを通じて実行される場合には、ソフトウェアを構成するプログラムは、インターネット等のネットワークまたは取り外し可能媒体1211等の記憶媒体からインストールされる。
【0067】
記憶媒体が、図12に示したようなプログラムをユーザに提供する装置とは別にプログラムを記憶および配信する取り外し可能媒体1211に限定されないことは、当業者に明らかである。取り外し可能媒体1211の例としては、磁気ディスク(フロッピーディスク(登録商標)を含む)、光ディスク(Compact Disk Read Only Memory(CD−ROM)やDigital Versatile Disk(DVD)を含む)、光磁気ディスク(Mini Disk(MD)(登録商標)を含む)、および半導体メモリが挙げられる。あるいは、記憶媒体は、ROM1202または記憶部1208中に含まれるハードディスクであってよく、ROM1202または記憶部1208には、プログラムが含まれ、それらを含む装置と共にユーザにプログラムが提供される。
【0068】
本発明は、機械可読命令コードを格納するプログラムプロダクトをも提案する。機械(コンピュータ等)により命令コードが読み出され実行される場合に、本発明の実施形態に従った前述の方法が実行され得る。
【0069】
これに対応して、本発明の開示には、機械可読命令コードを格納するプログラムプロダクトを記憶する記憶媒体も含まれる。記憶媒体には、フロッピーディスク、光ディスク、光磁気ディスク、メモリカード、メモリスティック等が含まれるが、これらに限定されるものではない。
【0070】
付記1:送信機により送信され、第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを受信する受信機に用いられる偏波散乱補償装置であって、
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が送信されたときに送信機により同時に送信された前記第2の偏波状態の信号との時系列を整列する時系列整列部と、
前記時系列整列後の前記第1の偏波状態の信号および前記第2の偏波状態の信号について、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による散乱の散乱係数とを推定する偏波散乱推定部と、
前記偏波散乱推定部により推定された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とに従って、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱とを除去する偏波散乱除去部と
を含む偏波散乱補償装置。
付記2:前記時系列整列部は、
前記第1の偏波状態の信号を第1の所定シンボルの間遅延する第1の遅延レジスタと、
前記第2の偏波状態の信号を第2の所定シンボルの間遅延する第2の遅延レジスタと
を含む、付記1に記載の偏波散乱補償装置。
付記3:前記偏波散乱推定部は、
前記第1の偏波状態の信号上に変調されたデータを判定する第1のデータ判定部と、
前記第2の偏波状態の信号上に変調されたデータを判定する第2のデータ判定部と、
前記第1の偏波状態の信号と、前記第2の偏波状態の信号と、前記第1のデータ判定部により判定された前記データと、前記第2のデータ判定部により判定された前記データとに従って、各シンボル時点において、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とを計算する偏波散乱係数計算部と、
複数のシンボル時点における前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第1の平均化部と、
複数のシンボル時点における前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第2の平均化部と
を含む、付記1に記載の偏波散乱補償装置。
付記4:前記偏波散乱除去部は、
前記第2のデータ判定部により判定されたデータ値を前記第1の平均化部により取得された前記平均値と乗算する第1の乗算器と、
前記時系列整列後の前記第1の偏波状態の信号から前記第1の乗算器により取得された乗算結果を減算する第1の減算器と、
前記第1のデータ判定部により判定されたデータ値を前記第2の平均化部により取得された前記平均値と乗算する第2の乗算器と、
前記時系列整列後の前記第2の偏波状態の信号から前記第2の乗算器により取得された乗算結果を減算する第2の減算器と
を含む、付記3に記載の偏波散乱補償装置。
付記5:前記偏波散乱除去部は、
前記時系列整列後の前記第2の偏波状態の信号を前記第1の平均化部により取得された前記平均値と乗算する第1の乗算器と、
前記時系列整列後の前記第1の偏波状態の信号から前記第1の乗算器により取得された乗算結果を減算する第1の減算器と、
前記時系列整列後の前記第1の偏波状態の信号を前記第2の平均化部により取得された前記平均値と乗算する第2の乗算器と、
前記時系列整列後の前記第2の偏波状態の信号から前記第2の乗算器により取得された乗算結果を減算する第2の減算器と
を含む、付記3に記載の偏波散乱補償装置。
付記6:前記偏波散乱除去部は、
前記第1および第2の平均化部により取得された前記平均値に従って、前記第1および第2の偏波状態の信号間の偏波散乱行列の逆行列を決定する逆行列決定部と、
前記逆行列決定部により決定された逆行列を前記第1および第2の偏波状態の信号と乗算する乗算部と
を含む、付記3に記載の偏波散乱補償装置。
付記7:前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とを整列する第1の付加的時系列整列部と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第1の付加的散乱推定部と、
前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第1の付加的散乱推定部により推定された前記散乱係数に従って除去する第1の付加的散乱除去部と
をさらに含む、付記1に記載の偏波散乱補償装置。
付記8:前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とを整列する第2の付加的時系列整列部と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第2の付加的散乱推定部と、
前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第2の付加的散乱推定部により推定された前記散乱係数に従って除去する第2の付加的散乱除去部と
をさらに含む、付記1に記載の偏波散乱補償装置。
付記9:前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とを整列する第2の付加的時系列整列部と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第2の付加的散乱推定部と、
前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第2の付加的散乱推定部により推定された前記散乱係数に従って除去する第2の付加的散乱除去部と
をさらに含む、付記7に記載の偏波散乱補償装置。
付記10:前記時系列整列部は、前記第1の偏波状態の信号を第1の所定シンボルの間遅延する第1の遅延レジスタと、前記第2の偏波状態の信号を第2の所定シンボルの間遅延する第2の遅延レジスタとを含み、
前記第1の付加的時系列整列部は、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号を所定のシンボルの間遅延する第1の付加的遅延レジスタを含み、
前記第2の付加的時系列整列部は、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号を所定のシンボルの間遅延する第2の付加的遅延レジスタを含む、
付記9に記載の偏波散乱補償装置。
付記11:前記第1の付加的散乱除去部は、
前記第1の偏波状態の信号を1シンボル以上前方にシフトする第1の列前方シフト部と、
前記第1の列前方シフト部により前方にシフトされた前記第1の偏波状態の信号を、前記第1の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第1の付加的乗算部と、
前記第2の偏波状態の信号から前記第1の付加的乗算部により取得された乗算結果を減算する第1の付加的減算部と、
前記第2の偏波状態の信号を1シンボル以上後方にシフトする第1の列後方シフト部と、
前記第1の列後方シフト部により後方にシフトされた前記第2の偏波状態の信号を、前記第1の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第2の付加的乗算部と、
前記第1の偏波状態の信号から前記第2の付加的乗算部により取得された乗算結果を減算する第2の付加的減算部と
を含む、付記9に記載の偏波散乱補償装置。
付記12:前記第1の付加的散乱推定部は、前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とに対するデータ判定を実行し、前記第1の偏波状態の信号上に変調されたデータと前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上に変調されたデータとを取得して、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数とを推定し、
前記第1の付加的散乱除去部は、
前記第1の偏波状態の信号上に変調された前記データを1シンボル以上前方にシフトする第1の列前方シフト部と、
前記第1の列前方シフト部により前方にシフトされた前記第1の偏波状態の信号上に変調された前記データを、前記第1の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第1の付加的乗算部と、
前記第2の偏波状態の信号から前記第1の付加的乗算部により取得された乗算結果を減算する第1の付加的減算部と、
前記第2の偏波状態の信号上に変調された前記データを1シンボル以上後方にシフトする第2の列後方シフト部と、
前記第2の列後方シフト部により後方にシフトされた前記第2の偏波状態の信号上に変調された前記データを、前記第1の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第2の付加的乗算部と、
前記第1の偏波状態の信号から前記第2の付加的乗算部により取得された乗算結果を減算する第2の付加的減算部と
を含む、付記9に記載の偏波散乱補償装置。
付記13:前記第2の付加的散乱除去部は、
前記第1の偏波状態の信号を1シンボル以上後方にシフトする第2の列後方シフト部と、
前記第2の列後方シフト部により後方にシフトされた前記第1の偏波状態の信号を、前記第2の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第3の付加的乗算部と、
前記第2の偏波状態の信号から前記第3の付加的乗算部により取得された乗算結果を減算する第3の付加的減算部と、
前記第2の偏波状態の信号を1シンボル以上前方にシフトする第2の列前方シフト部と、
前記第2の列前方シフト部により前方にシフトされた前記第2の偏波状態の信号を、前記第1の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第4の付加的乗算部と、
前記第1の偏波状態の信号から前記第4の付加的乗算部により取得された乗算結果を減算する第4の付加的減算部と
を含む、付記11に記載の偏波散乱補償装置。
付記14:前記第2の付加的散乱推定部は、前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とに対するデータ判定を実行し、前記第1の偏波状態の信号上に変調されたデータと前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上に変調されたデータとを取得して、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数とを推定し、
前記第2の付加的散乱除去部は、
前記第1の偏波状態の信号上に変調された前記データを1シンボル以上後方にシフトする第2の列後方シフト部と、
前記第2の列後方シフト部により後方にシフトされた前記第1の偏波状態の信号上に変調された前記データを、前記第2の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第3の付加的乗算部と、
前記第2の偏波状態の信号から前記第1の付加的乗算部により取得された乗算結果を減算する第3の付加的減算部と、
前記第2の偏波状態の信号上に変調された前記データを1シンボル以上前方にシフトする第2の列前方シフト部と、
前記第2の列前方シフト部により前方にシフトされた前記第2の偏波状態の信号上に変調された前記データを、前記第2の付加的散乱推定部により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第4の付加的乗算部と、
前記第1の偏波状態の信号から前記第4の付加的乗算部により取得された乗算結果を減算する第4の付加的減算部と
を含む、付記11に記載の偏波散乱補償装置。
付記15:前記第1の列前方シフト部および前記第2の列後方シフト部は、相互に集積され、第1の遅延器および第1の3次遅延器から構成され、前記第1の遅延器は、前記時系列整列後の前記第1の偏波状態の信号を(D−2−m)シンボル周期の間遅延し、ここで、Dシンボル周期は、前記偏波散乱推定部により実行される偏波散乱推定に必要なシンボル周期であり、前記第1の3次遅延器は、前記第1の遅延器により遅延されている前記信号を1+mシンボル周期および3+mシンボル周期の間それぞれ遅延して、前記第1の偏波状態の信号を1シンボル以上後方にシフトし且つ前記第1の偏波状態の信号を1シンボル以上前方にシフトし、ここで、mは、1以上のシンボル数から1を減算することにより取得される値である、
付記13または14に記載の偏波散乱補償装置。
付記16:前記第1の列後方シフト部および前記第2の列前方シフト部は、相互に集積され、第2の遅延器および第2の3次遅延器から構成され、前記第2の遅延器は、前記時系列整列後の前記第2の偏波状態の信号を(D−2−m)シンボル周期の間遅延し、ここで、Dシンボル周期は、前記偏波散乱推定部により実行される偏波散乱推定に必要なシンボル周期であり、前記第2の3次遅延器は、前記第2の遅延器により遅延されている前記信号702を1+mシンボル周期および3+mシンボル周期の間それぞれ遅延して、前記第2の偏波状態の信号を1シンボル以上後方にシフトし且つ前記第2の偏波状態の信号を1シンボル以上前方にシフトし、ここで、mは、1以上のシンボル数から1を減算することにより取得される値である、
付記13または14に記載の偏波散乱補償装置。
付記17:H偏波状態位相回復器、V偏波状態位相回復器、H偏波状態データ回復器、およびV偏波状態データ回復器を含むコヒーレント受信機であって、付記1から16の何れかに記載の前記偏波散乱補償装置を含み、前記H偏波状態位相回復器および前記V偏波状態位相回復器から信号を受信し、前記H偏波状態データ回復器および前記V偏波状態データ回復器に信号を出力する、コヒーレント受信器。
付記18:前記コヒーレント受信機は、並列構造を有する低速等化兼偏波逆多重化器を用いる、付記17に記載のコヒーレント受信機。
付記19:送信機により送信され、第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを受信する受信機に用いられる偏波散乱補償方法であって、
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が送信されたときに送信機により同時に送信された前記第2の偏波状態の信号との時系列を整列する時系列整列処理と、
前記時系列整列後の前記第1の偏波状態の信号および前記第2の偏波状態の信号について、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による散乱の散乱係数とを推定する偏波散乱推定処理と、
前記偏波散乱推定処理により推定された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とに従って、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱とを除去する偏波散乱除去処理と
を含む偏波散乱補償方法。
付記20:前記偏波散乱推定処理は、
前記第1の偏波状態の信号上に変調されたデータを判定する第1のデータ判定処理と、
前記第2の偏波状態の信号上に変調されたデータを判定する第2のデータ判定処理と、
前記第1の偏波状態の信号と、前記第2の偏波状態の信号と、前記第1のデータ判定処理により判定された前記データと、前記第2のデータ判定処理により判定された前記データとに従って、各シンボル時点において、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とを計算する偏波散乱係数計算処理と、
複数のシンボル時点における前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第1の平均化処理と、
複数のシンボル時点における前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第2の平均化処理と
を含む、付記19に記載の偏波散乱補償方法。
付記21:前記偏波散乱除去処理は、
前記第2のデータ判定処理により判定されたデータ値を前記第1の平均化処理により取得された前記平均値と乗算する第1の乗算処理と、
前記時系列整列後の前記第1の偏波状態の信号から前記第1の乗算処理により取得された乗算結果を減算する第1の減算処理と、
前記第1のデータ判定処理により判定されたデータ値を前記第2の平均化処理により取得された前記平均値と乗算する第2の乗算処理と、
前記時系列整列後の前記第2の偏波状態の信号から前記第2の乗算処理により取得された乗算結果を減算する第2の減算処理と
を含む、付記20に記載の偏波散乱補償方法。
付記22:前記偏波散乱除去処理は、
前記時系列整列後の前記第2の偏波状態の信号を前記第1の平均化処理により取得された前記平均値と乗算する第1の乗算処理と、
前記時系列整列後の前記第1の偏波状態の信号から前記第1の乗算処理により取得された乗算結果を減算する第1の減算処理と、
前記時系列整列後の前記第1の偏波状態の信号を前記第2の平均化処理により取得された前記平均値と乗算する第2の乗算処理と、
前記時系列整列後の前記第2の偏波状態の信号から前記第2の乗算処理により取得された乗算結果を減算する第2の減算処理と
を含む、付記20に記載の偏波散乱補償方法。
付記23:前記偏波散乱除去処理は、
前記第1および第2の平均化処理により取得された前記平均値に従って、前記第1および第2の偏波状態の信号間の偏波散乱行列の逆行列を決定する逆行列決定処理と、
前記逆行列決定処理により決定された逆行列を前記第1および第2の偏波状態の信号と乗算する乗算処理と
を含む、付記20に記載の偏波散乱補償方法。
付記24:前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とを整列する第1の付加的時系列整列処理と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第1の付加的散乱推定処理と、
前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第1の付加的散乱推定処理により推定された前記散乱係数に従って除去する第1の付加的散乱除去処理と
をさらに含む、付記19に記載の偏波散乱補償方法。
付記25:前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とを整列する第2の付加的時系列整列処理と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第2の付加的散乱推定処理と、
前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第2の付加的散乱推定処理により推定された前記散乱係数に従って除去する第2の付加的散乱除去処理と
をさらに含む、付記19に記載の偏波散乱補償方法。
付記26:前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とを整列する第2の付加的時系列整列処理と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第2の付加的散乱推定処理と、
前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第2の付加的散乱推定処理により推定された前記散乱係数に従って除去する第2の付加的散乱除去処理と
をさらに含む、付記24に記載の偏波散乱補償方法。
付記27:前記時系列整列処理は、前記第1の偏波状態の信号を第1の所定シンボルの間遅延する第1の遅延記録処理と、前記第2の偏波状態の信号を第2の所定シンボルの間遅延する第2の遅延記録処理とを含み、
前記第1の付加的時系列整列処理は、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号を所定のシンボルの間遅延する第1の付加的遅延記録処理を含み、
前記第2の付加的時系列整列処理は、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号を所定のシンボルの間遅延する第2の付加的遅延記録処理を含む、
付記26に記載の偏波散乱補償方法。
付記28:前記第1の付加的散乱除去処理は、
前記第1の偏波状態の信号を1シンボル以上前方にシフトする第1の列前方シフト処理と、
前記第1の列前方シフト処理により前方にシフトされた前記第1の偏波状態の信号を、前記第1の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第1の付加的乗算処理と、
前記第2の偏波状態の信号から前記第1の付加的乗算処理により取得された乗算結果を減算する第1の付加的減算処理と、
前記第2の偏波状態の信号を1シンボル以上後方にシフトする第1の列後方シフト処理と、
前記第1の列後方シフト処理により後方にシフトされた前記第2の偏波状態の信号を、前記第1の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第2の付加的乗算処理と、
前記第1の偏波状態の信号から前記第2の付加的乗算処理により取得された乗算結果を減算する第2の付加的減算処理と
を含む、付記26に記載の偏波散乱補償方法。
付記29:前記第1の付加的散乱推定処理は、前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とに対するデータ判定を実行し、前記第1の偏波状態の信号上に変調されたデータと前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上に変調されたデータとを取得して、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数とを推定し、
前記第1の付加的散乱除去処理は、
前記第1の偏波状態の信号上に変調された前記データを1シンボル以上前方にシフトする第1の列前方シフト処理と、
前記第1の列前方シフト処理により前方にシフトされた前記第1の偏波状態の信号上に変調された前記データを、前記第1の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第1の付加的乗算処理と、
前記第2の偏波状態の信号から前記第1の付加的乗算処理により取得された乗算結果を減算する第1の付加的減算処理と、
前記第2の偏波状態の信号上に変調された前記データを1シンボル以上後方にシフトする第2の列後方シフト処理と、
前記第2の列後方シフト処理により後方にシフトされた前記第2の偏波状態の信号上に変調された前記データを、前記第1の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第2の付加的乗算処理と、
前記第1の偏波状態の信号から前記第2の付加的乗算処理により取得された乗算結果を減算する第2の付加的減算処理と
を含む、付記26に記載の偏波散乱補償方法。
付記30:前記第2の付加的散乱除去処理は、
前記第1の偏波状態の信号を1シンボル以上後方にシフトする第2の列後方シフト処理と、
前記第2の列後方シフト処理により後方にシフトされた前記第1の偏波状態の信号を、前記第2の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第3の付加的乗算処理と、
前記第2の偏波状態の信号から前記第3の付加的乗算処理により取得された乗算結果を減算する第3の付加的減算処理と、
前記第2の偏波状態の信号を1シンボル以上前方にシフトする第2の列前方シフト処理と、
前記第2の列前方シフト処理により前方にシフトされた前記第2の偏波状態の信号を、前記第1の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第4の付加的乗算処理と、
前記第1の偏波状態の信号から前記第4の付加的乗算処理により取得された乗算結果を減算する第4の付加的減算処理と
を含む、付記28に記載の偏波散乱補償方法。
付記31:前記第2の付加的散乱推定処理は、前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とに対するデータ判定を実行し、前記第1の偏波状態の信号上に変調されたデータと前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上に変調されたデータとを取得して、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数とを推定し、
前記第2の付加的散乱除去処理は、
前記第1の偏波状態の信号上に変調された前記データを1シンボル以上後方にシフトする第2の列後方シフト処理と、
前記第2の列後方シフト処理により後方にシフトされた前記第1の偏波状態の信号上に変調された前記データを、前記第2の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第3の付加的乗算処理と、
前記第2の偏波状態の信号から前記第1の付加的乗算処理により取得された乗算結果を減算する第3の付加的減算処理と、
前記第2の偏波状態の信号上に変調された前記データを1シンボル以上前方にシフトする第2の列前方シフト処理と、
前記第2の列前方シフト処理により前方にシフトされた前記第2の偏波状態の信号上に変調された前記データを、前記第2の付加的散乱推定処理により推定された前記散乱係数であって、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第4の付加的乗算処理と、
前記第1の偏波状態の信号から前記第4の付加的乗算処理により取得された乗算結果を減算する第4の付加的減算処理と
を含む、付記28に記載の偏波散乱補償方法。
【0071】
本発明の実施形態の上記記載において、ある実施形態について記述および/または図示された特徴は、他の実施形態の特徴と組み合わせまたは置き換えるために、1つ以上の他の実施形態において同一または同様に用いられ得ることに留意すべきである。
【0072】
本明細書では、用語「含む/構成する」もしくは「含み/構成し」は、特徴、要素、ステップ、もしくは組み立ての存在を指し、1つ以上の他の特徴、要素、ステップ、組み立て、もしくはそれらの組み合わせの存在または付加を排除するものではない。
【0073】
また、本発明の方法は、本明細書で記述したような時間的順序に従って実行されることに限定されず、他の時系列で、同時に、または独立して実行し得る。したがって、本明細書で記述した方法の実行順序は、本発明の技術的範囲を制限しない。
【特許請求の範囲】
【請求項1】
送信機により送信され、第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを受信する受信機に用いられる偏波散乱補償装置であって、
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が送信されたときに送信機により同時に送信された前記第2の偏波状態の信号との時系列を整列する時系列整列部と、
前記時系列整列後の前記第1の偏波状態の信号および前記第2の偏波状態の信号について、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による散乱の散乱係数とを推定する偏波散乱推定部と、
前記偏波散乱推定部により推定された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とに従って、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱とを除去する偏波散乱除去部と
を含む偏波散乱補償装置。
【請求項2】
前記偏波散乱推定部は、
前記第1の偏波状態の信号上に変調されたデータを判定する第1のデータ判定部と、
前記第2の偏波状態の信号上に変調されたデータを判定する第2のデータ判定部と、
前記第1の偏波状態の信号と、前記第2の偏波状態の信号と、前記第1のデータ判定部により判定された前記データと、前記第2のデータ判定部により判定された前記データとに従って、各シンボル時点において、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とを計算する偏波散乱係数計算部と、
複数のシンボル時点における前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第1の平均化部と、
複数のシンボル時点における前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第2の平均化部と
を含む、請求項1に記載の偏波散乱補償装置。
【請求項3】
前記偏波散乱除去部は、
前記時系列整列後の前記第2の偏波状態の信号を前記第1の平均化部により取得された前記平均値と乗算する第1の乗算器と、
前記時系列整列後の前記第1の偏波状態の信号から前記第1の乗算器により取得された乗算結果を減算する第1の減算器と、
前記時系列整列後の前記第1の偏波状態の信号を前記第2の平均化部により取得された前記平均値と乗算する第2の乗算器と、
前記時系列整列後の前記第2の偏波状態の信号から前記第2の乗算器により取得された乗算結果を減算する第2の減算器と
を含む、請求項2に記載の偏波散乱補償装置。
【請求項4】
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とを整列する第1の付加的時系列整列部と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第1の付加的散乱推定部と、
前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第1の付加的散乱推定部により推定された前記散乱係数に従って除去する第1の付加的散乱除去部と、
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とを整列する第2の付加的時系列整列部と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第2の付加的散乱推定部と、
前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第2の付加的散乱推定部により推定された前記散乱係数に従って除去する第2の付加的散乱除去部と
をさらに含む、請求項1に記載の偏波散乱補償装置。
【請求項5】
前記第1の付加的散乱除去部は、
前記第1の偏波状態の信号を1シンボル以上前方にシフトする第1の列前方シフト部と、
前方にシフトされた前記第1の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第1の付加的乗算部と、
前記第2の偏波状態の信号から前記第1の付加的乗算部により取得された乗算結果を減算する第1の付加的減算部と、
前記第2の偏波状態の信号を1シンボル以上後方にシフトする第1の列後方シフト部と、
後方にシフトされた前記第2の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第2の付加的乗算部と、
前記第1の偏波状態の信号から前記第2の付加的乗算部により取得された乗算結果を減算する第2の付加的減算部と
を含み、
前記第2の付加的散乱除去部は、
前記第1の偏波状態の信号を1シンボル以上後方にシフトする第2の列後方シフト部と、
後方にシフトされた前記第1の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第3の付加的乗算部と、
前記第2の偏波状態の信号から前記第3の付加的乗算部により取得された乗算結果を減算する第3の付加的減算部と、
前記第2の偏波状態の信号を1シンボル以上前方にシフトする第2の列前方シフト部と、
前方にシフトされた前記第2の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第4の付加的乗算部と、
前記第1の偏波状態の信号から前記第4の付加的乗算部により取得された乗算結果を減算する第4の付加的減算部と
を含む、請求項4に記載の偏波散乱補償装置。
【請求項6】
送信機により送信され、第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを受信する受信機に用いられる偏波散乱補償方法であって、
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が送信されたときに送信機により同時に送信された前記第2の偏波状態の信号との時系列を整列する時系列整列処理と、
前記時系列整列後の前記第1の偏波状態の信号および前記第2の偏波状態の信号について、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による散乱の散乱係数とを推定する偏波散乱推定処理と、
前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とに従って、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱とを除去する偏波散乱除去処理と
を含む偏波散乱補償方法。
【請求項7】
前記偏波散乱推定処理は、
前記第1の偏波状態の信号上に変調されたデータを判定する第1のデータ判定処理と、
前記第2の偏波状態の信号上に変調されたデータを判定する第2のデータ判定処理と、
前記第1の偏波状態の信号と、前記第2の偏波状態の信号と、前記第1のデータ判定処理により判定された前記データと、前記第2のデータ判定処理により判定された前記データとに従って、各シンボル時点において、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とを計算する偏波散乱係数計算処理と、
複数のシンボル時点における前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第1の平均化処理と、
複数のシンボル時点における前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第2の平均化処理と
を含む、請求項6に記載の偏波散乱補償方法。
【請求項8】
前記偏波散乱除去処理は、
前記時系列整列後の前記第2の偏波状態の信号を前記第1の平均化処理により取得された前記平均値と乗算する第1の乗算処理と、
前記時系列整列後の前記第1の偏波状態の信号から前記第1の乗算処理により取得された乗算結果を減算する第1の減算処理と、
前記時系列整列後の前記第1の偏波状態の信号を前記第2の平均化処理により取得された前記平均値と乗算する第2の乗算処理と、
前記時系列整列後の前記第2の偏波状態の信号から前記第2の乗算処理により取得された乗算結果を減算する第2の減算処理と
を含む、請求項7に記載の偏波散乱補償方法。
【請求項9】
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とを整列する第1の付加的時系列整列処理と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第1の付加的散乱推定処理と、
前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第1の付加的散乱推定処理により推定された前記散乱係数に従って除去する第1の付加的散乱除去処理と、
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とを整列する第2の付加的時系列整列処理と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第2の付加的散乱推定処理と、
前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第2の付加的散乱推定処理により推定された前記散乱係数に従って除去する第2の付加的散乱除去処理と
をさらに含む、請求項6に記載の偏波散乱補償方法。
【請求項10】
前記第1の付加的散乱除去処理は、
前記第1の偏波状態の信号を1シンボル以上前方にシフトする第1の列前方シフト処理と、
前方にシフトされた前記第1の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第1の付加的乗算処理と、
前記第2の偏波状態の信号から前記第1の付加的乗算処理により取得された乗算結果を減算する第1の付加的減算処理と、
前記第2の偏波状態の信号を1シンボル以上後方にシフトする第1の列後方シフト処理と、
後方にシフトされた前記第2の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第2の付加的乗算処理と、
前記第1の偏波状態の信号から前記第2の付加的乗算処理により取得された乗算結果を減算する第2の付加的減算処理と
を含み、
前記第2の付加的散乱除去処理は、
前記第1の偏波状態の信号を1シンボル以上後方にシフトする第2の列後方シフト処理と、
後方にシフトされた前記第1の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第3の付加的乗算処理と、
前記第2の偏波状態の信号から前記第3の付加的乗算処理により取得された乗算結果を減算する第3の付加的減算処理と、
前記第2の偏波状態の信号を1シンボル以上前方にシフトする第2の列前方シフト処理と、
前方にシフトされた前記第2の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第4の付加的乗算処理と、
前記第1の偏波状態の信号から前記第4の付加的乗算処理により取得された乗算結果を減算する第4の付加的減算処理と
を含む、請求項9に記載の偏波散乱補償方法。
【請求項1】
送信機により送信され、第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを受信する受信機に用いられる偏波散乱補償装置であって、
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が送信されたときに送信機により同時に送信された前記第2の偏波状態の信号との時系列を整列する時系列整列部と、
前記時系列整列後の前記第1の偏波状態の信号および前記第2の偏波状態の信号について、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による散乱の散乱係数とを推定する偏波散乱推定部と、
前記偏波散乱推定部により推定された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とに従って、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱とを除去する偏波散乱除去部と
を含む偏波散乱補償装置。
【請求項2】
前記偏波散乱推定部は、
前記第1の偏波状態の信号上に変調されたデータを判定する第1のデータ判定部と、
前記第2の偏波状態の信号上に変調されたデータを判定する第2のデータ判定部と、
前記第1の偏波状態の信号と、前記第2の偏波状態の信号と、前記第1のデータ判定部により判定された前記データと、前記第2のデータ判定部により判定された前記データとに従って、各シンボル時点において、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とを計算する偏波散乱係数計算部と、
複数のシンボル時点における前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第1の平均化部と、
複数のシンボル時点における前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第2の平均化部と
を含む、請求項1に記載の偏波散乱補償装置。
【請求項3】
前記偏波散乱除去部は、
前記時系列整列後の前記第2の偏波状態の信号を前記第1の平均化部により取得された前記平均値と乗算する第1の乗算器と、
前記時系列整列後の前記第1の偏波状態の信号から前記第1の乗算器により取得された乗算結果を減算する第1の減算器と、
前記時系列整列後の前記第1の偏波状態の信号を前記第2の平均化部により取得された前記平均値と乗算する第2の乗算器と、
前記時系列整列後の前記第2の偏波状態の信号から前記第2の乗算器により取得された乗算結果を減算する第2の減算器と
を含む、請求項2に記載の偏波散乱補償装置。
【請求項4】
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とを整列する第1の付加的時系列整列部と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第1の付加的散乱推定部と、
前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第1の付加的散乱推定部により推定された前記散乱係数に従って除去する第1の付加的散乱除去部と、
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とを整列する第2の付加的時系列整列部と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第2の付加的散乱推定部と、
前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第2の付加的散乱推定部により推定された前記散乱係数に従って除去する第2の付加的散乱除去部と
をさらに含む、請求項1に記載の偏波散乱補償装置。
【請求項5】
前記第1の付加的散乱除去部は、
前記第1の偏波状態の信号を1シンボル以上前方にシフトする第1の列前方シフト部と、
前方にシフトされた前記第1の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第1の付加的乗算部と、
前記第2の偏波状態の信号から前記第1の付加的乗算部により取得された乗算結果を減算する第1の付加的減算部と、
前記第2の偏波状態の信号を1シンボル以上後方にシフトする第1の列後方シフト部と、
後方にシフトされた前記第2の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第2の付加的乗算部と、
前記第1の偏波状態の信号から前記第2の付加的乗算部により取得された乗算結果を減算する第2の付加的減算部と
を含み、
前記第2の付加的散乱除去部は、
前記第1の偏波状態の信号を1シンボル以上後方にシフトする第2の列後方シフト部と、
後方にシフトされた前記第1の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第3の付加的乗算部と、
前記第2の偏波状態の信号から前記第3の付加的乗算部により取得された乗算結果を減算する第3の付加的減算部と、
前記第2の偏波状態の信号を1シンボル以上前方にシフトする第2の列前方シフト部と、
前方にシフトされた前記第2の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第4の付加的乗算部と、
前記第1の偏波状態の信号から前記第4の付加的乗算部により取得された乗算結果を減算する第4の付加的減算部と
を含む、請求項4に記載の偏波散乱補償装置。
【請求項6】
送信機により送信され、第1の偏波状態の信号および第2の偏波状態の信号上に変調されたデータを受信する受信機に用いられる偏波散乱補償方法であって、
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が送信されたときに送信機により同時に送信された前記第2の偏波状態の信号との時系列を整列する時系列整列処理と、
前記時系列整列後の前記第1の偏波状態の信号および前記第2の偏波状態の信号について、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による散乱の散乱係数とを推定する偏波散乱推定処理と、
前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とに従って、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱とを除去する偏波散乱除去処理と
を含む偏波散乱補償方法。
【請求項7】
前記偏波散乱推定処理は、
前記第1の偏波状態の信号上に変調されたデータを判定する第1のデータ判定処理と、
前記第2の偏波状態の信号上に変調されたデータを判定する第2のデータ判定処理と、
前記第1の偏波状態の信号と、前記第2の偏波状態の信号と、前記第1のデータ判定処理により判定された前記データと、前記第2のデータ判定処理により判定された前記データとに従って、各シンボル時点において、前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と、前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数とを計算する偏波散乱係数計算処理と、
複数のシンボル時点における前記第1の偏波状態の信号上の前記第2の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第1の平均化処理と、
複数のシンボル時点における前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数の平均値を計算する第2の平均化処理と
を含む、請求項6に記載の偏波散乱補償方法。
【請求項8】
前記偏波散乱除去処理は、
前記時系列整列後の前記第2の偏波状態の信号を前記第1の平均化処理により取得された前記平均値と乗算する第1の乗算処理と、
前記時系列整列後の前記第1の偏波状態の信号から前記第1の乗算処理により取得された乗算結果を減算する第1の減算処理と、
前記時系列整列後の前記第1の偏波状態の信号を前記第2の平均化処理により取得された前記平均値と乗算する第2の乗算処理と、
前記時系列整列後の前記第2の偏波状態の信号から前記第2の乗算処理により取得された乗算結果を減算する第2の減算処理と
を含む、請求項7に記載の偏波散乱補償方法。
【請求項9】
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とを整列する第1の付加的時系列整列処理と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第1の付加的散乱推定処理と、
前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第1の付加的散乱推定処理により推定された前記散乱係数に従って除去する第1の付加的散乱除去処理と、
前記第1の偏波状態の信号と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とを整列する第2の付加的時系列整列処理と、
前記時系列整列後の前記第1の偏波状態の信号と前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号とについて、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による散乱の散乱係数と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の散乱の散乱係数とを推定する第2の付加的散乱推定処理と、
前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱と、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱とを、前記第2の付加的散乱推定処理により推定された前記散乱係数に従って除去する第2の付加的散乱除去処理と
をさらに含む、請求項6に記載の偏波散乱補償方法。
【請求項10】
前記第1の付加的散乱除去処理は、
前記第1の偏波状態の信号を1シンボル以上前方にシフトする第1の列前方シフト処理と、
前方にシフトされた前記第1の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第1の付加的乗算処理と、
前記第2の偏波状態の信号から前記第1の付加的乗算処理により取得された乗算結果を減算する第1の付加的減算処理と、
前記第2の偏波状態の信号を1シンボル以上後方にシフトする第1の列後方シフト処理と、
後方にシフトされた前記第2の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信される1シンボル以上前の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第2の付加的乗算処理と、
前記第1の偏波状態の信号から前記第2の付加的乗算処理により取得された乗算結果を減算する第2の付加的減算処理と
を含み、
前記第2の付加的散乱除去処理は、
前記第1の偏波状態の信号を1シンボル以上後方にシフトする第2の列後方シフト処理と、
後方にシフトされた前記第1の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号上の前記第1の偏波状態の信号による前記散乱の前記散乱係数と乗算する第3の付加的乗算処理と、
前記第2の偏波状態の信号から前記第3の付加的乗算処理により取得された乗算結果を減算する第3の付加的減算処理と、
前記第2の偏波状態の信号を1シンボル以上前方にシフトする第2の列前方シフト処理と、
前方にシフトされた前記第2の偏波状態の信号を、前記第1の偏波状態の信号が前記送信機により送信された1シンボル以上後の時点で送信された前記第2の偏波状態の信号による前記第1の偏波状態の信号上の前記散乱の前記散乱係数と乗算する第4の付加的乗算処理と、
前記第1の偏波状態の信号から前記第4の付加的乗算処理により取得された乗算結果を減算する第4の付加的減算処理と
を含む、請求項9に記載の偏波散乱補償方法。
【図1】

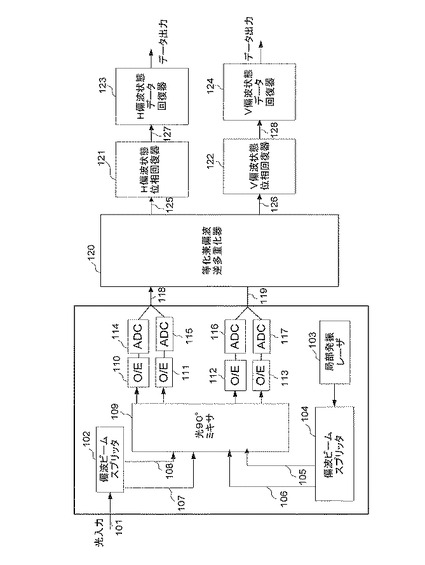
【図2】
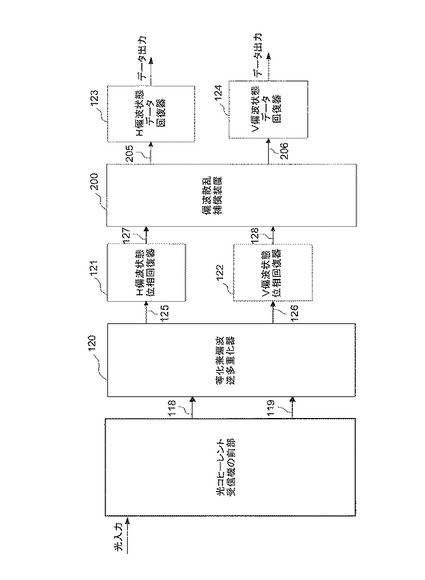
【図3】
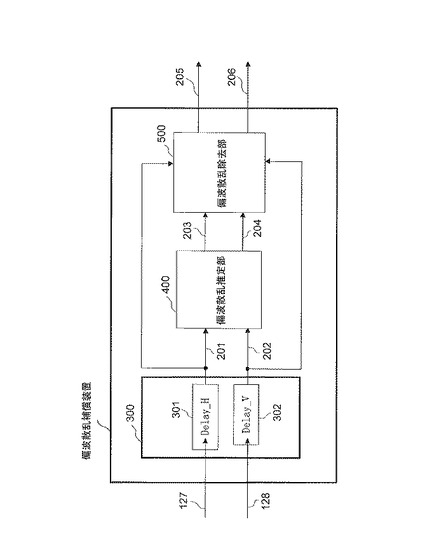
【図4】
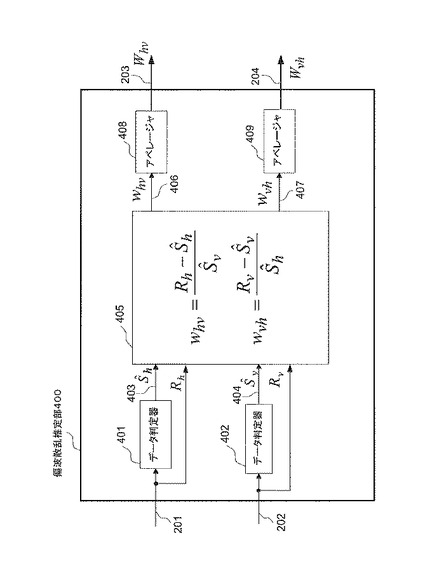
【図5A】
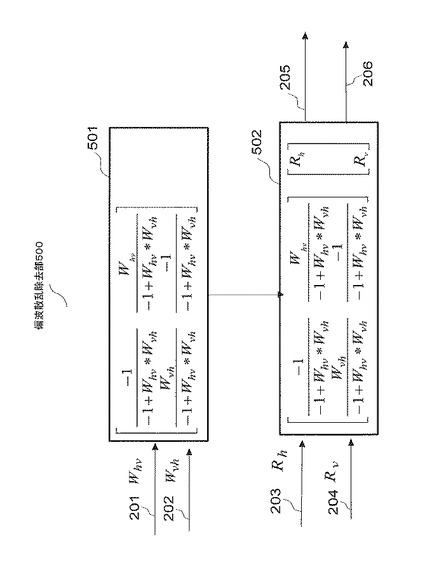
【図5B】
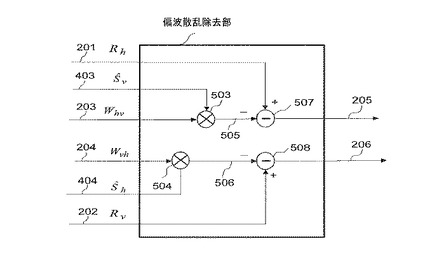
【図5C】
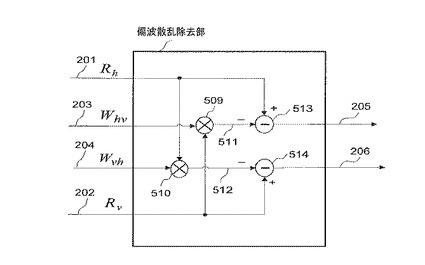
【図6】
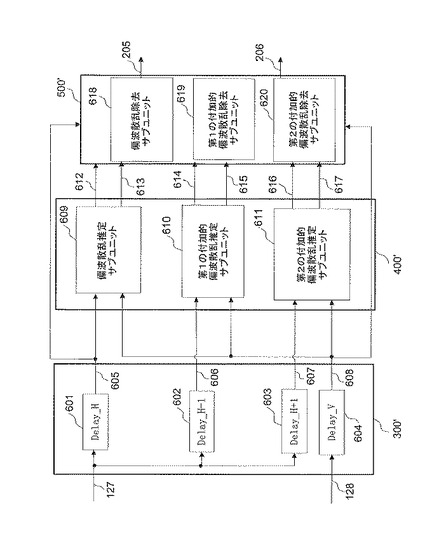
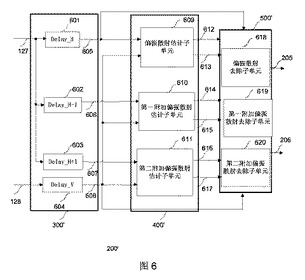
【図7】
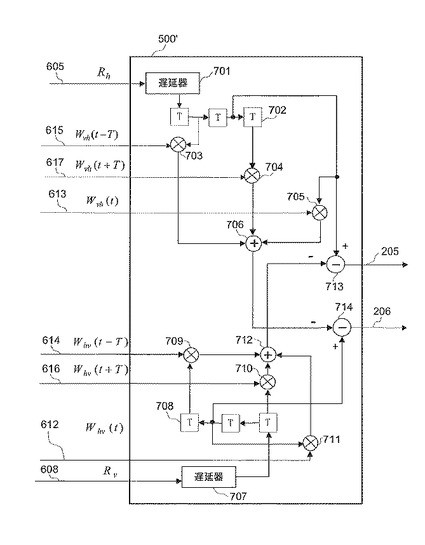
【図8】
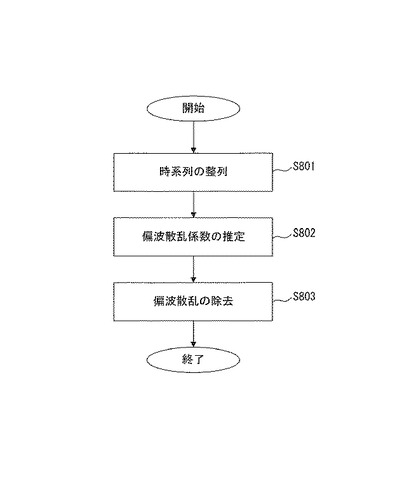
【図9】
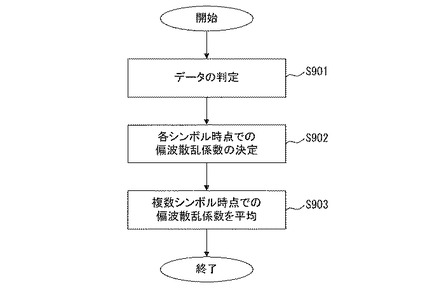
【図10】
【図11】
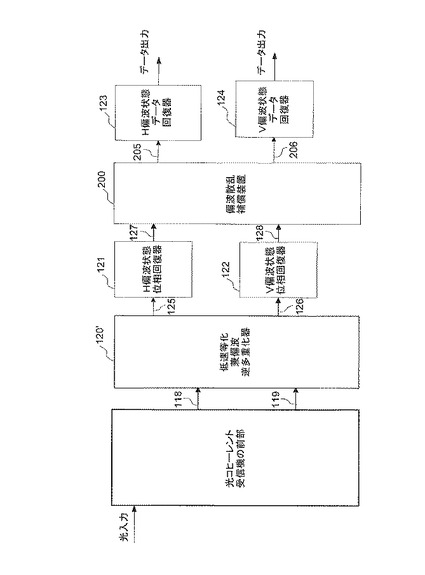
【図12】
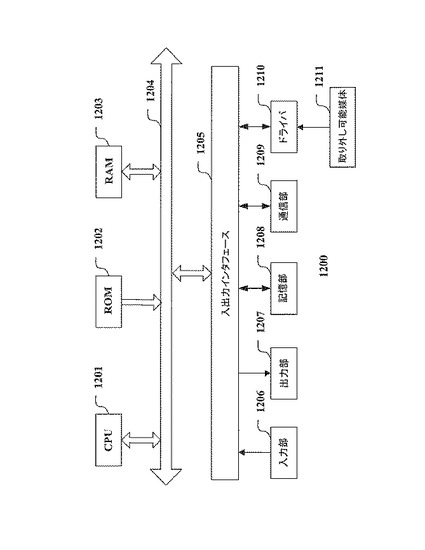
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図5C】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公表番号】特表2013−509747(P2013−509747A)
【公表日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2012−535582(P2012−535582)
【出願日】平成21年10月30日(2009.10.30)
【国際出願番号】PCT/CN2009/074734
【国際公開番号】WO2011/050538
【国際公開日】平成23年5月5日(2011.5.5)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公表日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成21年10月30日(2009.10.30)
【国際出願番号】PCT/CN2009/074734
【国際公開番号】WO2011/050538
【国際公開日】平成23年5月5日(2011.5.5)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]