
停止/移動判定方法
【課題】測位演算を行わずに受信機を備える移動体の停止/判定方法を実現する。
【解決手段】停止/判定方法は、GPS衛星の衛星信号を受信することと、衛星信号を受信することと、衛星信号の所定時間mにおける信号強度を保存することと、所定時間mとは異なる期間の所定時間jにおける信号強度を保存することと、保存された前記所定時間mにおける信号強度及び前記所定時間jにおける信号強度の差を計算することと、信号強度の差を所定期間にわたり累積した値をパラメーターとして算出することと、閾値を決定することと、パラメーターと前記閾値とを比較し、パラメーター≧閾値の場合は移動状態、パラメーター<閾値の場合は停止状態と判定する。
【解決手段】停止/判定方法は、GPS衛星の衛星信号を受信することと、衛星信号を受信することと、衛星信号の所定時間mにおける信号強度を保存することと、所定時間mとは異なる期間の所定時間jにおける信号強度を保存することと、保存された前記所定時間mにおける信号強度及び前記所定時間jにおける信号強度の差を計算することと、信号強度の差を所定期間にわたり累積した値をパラメーターとして算出することと、閾値を決定することと、パラメーターと前記閾値とを比較し、パラメーター≧閾値の場合は移動状態、パラメーター<閾値の場合は停止状態と判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、受信機を備える移動体の停止/移動判定方法に関する。
【背景技術】
【0002】
従来、GPS受信機を備える移動体が停止状態にあるか、移動状態にあるかを判定する方法としては、測位演算の結果として得られた移動体の速度を用いるのが一般的であった。しかし、この方法では測位精度が演算結果の速度に影響を及ぼして停止/移動判定を正確にできないことが考えられる。
そのために、移動体に加速度センサーを備え、移動体の停止または移動について加速度センサーの検出値適合範囲(閾値)を設定し、加速度センサーの検出値との差を演算して移動体が停止状態にあるか移動状態にあるかを判定する方法が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−117147号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した特許文献1に係る停止/移動判定方法では、加速度センサーの検出値を用いている。よって、加速度センサーに代表される外部センサーを備えていない場合には、的確な停止/移動判定はできず、そのような場合には、前述したような測位演算の結果として得られた移動体の速度を用いるという従来の方法を用いなければならない。従って、このような方法では、衛星信号の受信環境変化による測位精度の変動によって速度精度に影響を及ぼし、停止/移動判定を正確にできないという課題を有する。
【課題を解決するための手段】
【0005】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
【0006】
[適用例1]本適用例に係る停止/移動判定方法は、衛星信号を受信することと、前記衛星信号の所定時間mにおける信号強度を保存することと、前記所定時間mとは異なる期間の所定時間jにおける信号強度を保存することと、保存された前記所定時間mにおける信号強度及び前記所定時間jにおける信号強度の差を計算することと、前記信号強度の差を所定期間にわたり累積した値をパラメーターとして算出することと、閾値を決定することと、前記パラメーターと前記閾値とを比較し、移動体が停止状態か移動状態かを判定することと、を含むことを特徴とする。
【0007】
本適用例によれば、衛星信号の所定時間mにおける信号強度と、所定時間jにおける信号強度との差からパラメーターを算出し、移動体が停止状態であるか、移動状態であるかの判定基準である閾値と比較することで、例えば、パラメーター≧閾値の場合は移動状態、パラメーター<閾値の場合は停止状態と判定する。従って、加速度センサー等の外部センサーを備えなくても、また、受信環境の変化による測位演算の影響なしに、停止状態か移動状態かを的確に判定することができる。
【0008】
[適用例2]上記適用例に係る停止/移動判定方法において、前記閾値を決定することは、前記移動体が停止している場合の前記パラメーターの母集団と、前記移動体が移動している場合の前記パラメーターの母集団と、前記移動体が停止している場合の前記パラメーターの母集団及び前記移動体が移動している場合の前記パラメーターの母集団の共分散行列を用いてマハラノビス距離を計算すること、を含むことが好ましい。
【0009】
このように多変数間の相関に基づく統計的手法を用いて閾値を決定すれば、ほぼリアルタイムに、かつ正確に停止状態か、移動状態かを判定することができる。また、受信環境の悪い地域や場所であっても適切な閾値を決定することができる。
【0010】
[適用例3]上記適用例に係る停止/移動判定方法において、前記閾値を決定することは、前記移動体の移動速度と前記パラメーターの値とを用いて、前記移動体の停止状態と移動状態の判定可能な閾値を予め決定しておくこと、が好ましい。
【0011】
移動速度の大きさとパラメーターの値とをみて、停止状態か、移動状態かを判別できる値の閾値を予め決定しておけば、閾値を容易に決定できる。
【0012】
[適用例4]上記適用例に係る停止/移動判定方法において、前記信号強度の差を累積する所定期間は、1秒間ないし5秒間であること、が好ましい。
【0013】
信号強度の差を累積する所定期間を1秒間ないし5秒間にすれば、パラメーターの値が安定し、適切な停止/移動判定を行える。なお、5秒間以上では、停止/移動判定結果に遅延がでることがあるため避けた方がよい。
【図面の簡単な説明】
【0014】
【図1】携帯型電話機の機能構成の1例を示すブロック図。
【図2】パラメーターの値と、受信機の停止状態及び移動状態とを比較したグラフ。
【図3】停止/移動判定方法における判定処理の流れを示すフローチャート。
【図4】実施例1に係るパラメーター速度の関係の1例を時系列的に表したグラフ。
【図5】図4の結果から決定した閾値を用いた停止/移動判定の結果。
【図6】実施例2に係るパラメーター速度の関係の1例を時系列的に表したグラフ。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態を図面を参照して説明する。なお、本実施の形態では、衛星測位システムの一種であるGPS(Global Positioning System)を例示して説明する。
(機能構成)
【0016】
本実施形態では、受信機1の実施例として携帯型電話機をあげ説明する。
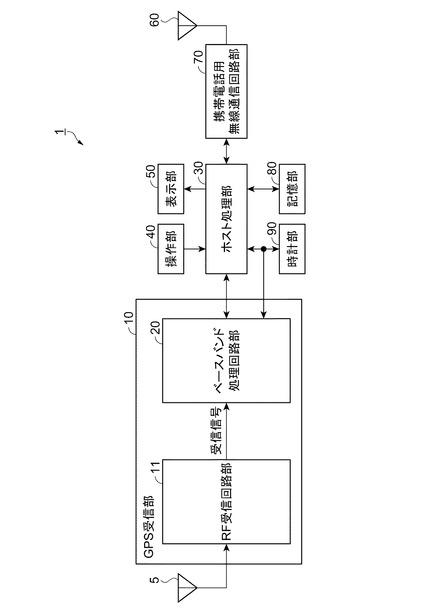
図1は、携帯型電話機の機能構成の1例を示すブロック図である。受信機1は、GPSアンテナ5と、GPS受信部10と、ホスト処理部30と、操作部40と、表示部50と、携帯電話用アンテナ60と、携帯電話用無線通信回路部70と、記憶部80と、時計部90とを備えて構成される。
【0017】
GPSアンテナ5は、複数のGPS衛星から発信されているGPS衛星信号を含むRF(Radio Frequency)信号を受信する受信点(アンテナ)であり、受信信号をGPS受信部10に出力する。
【0018】
GPS受信部10は、GPSアンテナ5から入力した信号に基づいて受信機1の位置、移動速度等を算出・演算する演算部分である。GPS受信部10は、RF受信回路部11とベースバンド処理回路部20とを備えて構成される。なお、RF受信回路部11と、ベースバンド処理回路部20とは、それぞれ別のLSI(Large Scale Integrated circuit)として構成することも、1チップとして構成することも可能である。
【0019】
RF受信回路部11は、RF信号の受信回路である。回路構成としては、例えば、GPSアンテナ5から出力されたRF信号をA/D変換器でデジタル信号に変換し、デジタル信号を処理する受信回路を構成してもよい。また、GPSアンテナ5から出力されたRF信号をアナログ信号のまま信号処理し、最終的にA/D変換することでデジタル信号をベースバンド処理回路部20に出力する構成としてもよい。
【0020】
ベースバンド処理回路部20は、RF受信回路部11から出力された受信信号に対して、キャリア除去や相関演算等を行ってGPS衛星信号を捕捉する。そして、捕捉したGPS衛星信号から抽出した時刻情報や衛星軌道情報等を利用して、受信機1の位置及び時計誤差を算出する。
【0021】
ホスト処理部30は、記憶部80に記憶されているシステムプログラム等の各種プログラムに従って受信機1の各部を統括的に制御するプロセッサーであり、CPU(Central Processing Unit)等のプロセッサーを有している。ホスト処理部30は、ベースバンド処理回路部20から取得した位置座標をもとに、表示部50に現在位置を指し示した地図を表示させたり、その位置座標を各種のアプリケーション処理に利用する。
【0022】
操作部40は、例えばタッチパネルやボタンスイッチ等により構成される入力装置であり、押下されたキーやボタンスイッチの信号をホスト処理部30に出力する。この操作部40の操作により、通話要求やメール送受信要求、位置算出要求等の各種指示入力がなされる。
【0023】
表示部50は、LCD(Liquid Crystal Display)等により構成され、ホスト処理部30から入力される表示信号に基づいた各種表示を行う表示装置である。表示部50には、位置表示画面や時刻情報等が表示される。
【0024】
携帯電話用アンテナ60は、受信機1の通信サービス事業者が設置した無線基地局との間で携帯電話用無線信号の送受信を行うアンテナである。
【0025】
携帯電話用無線通信回路部70は、RF変換回路、ベースバンド処理回路等によって構成される携帯電話の通信回路部であり、携帯電話用無線信号の変調・復調等を行うことで、通話やメールの送受信等を実現する。
【0026】
記憶部80は、ROM(Read Only Memory)やフラッシュROM、RAM(Random Access Memory)等の記憶装置を有して構成され、ホスト処理部30が受信機1を制御するためのシステムプログラムや、各種アプリケーション処理を実行するための各種プログラムやデータ等を記憶する。
【0027】
時計部90は、受信機1の内部時計であり、水晶振動子及び発振回路でなる水晶発振器等を有して構成される。時計部90の計時時刻は、ベースバンド処理回路部20及びホスト処理部30に随時出力される。時計部90は、ベースバンド処理回路部20により算出された時計誤差を用いて較正される。
(原理)
【0028】
続いて、本実施形態における停止/移動判定方法に係る原理について説明する。まず、停止状態と移動状態とで実測値から算出したパラメーターの値を比較してみる。
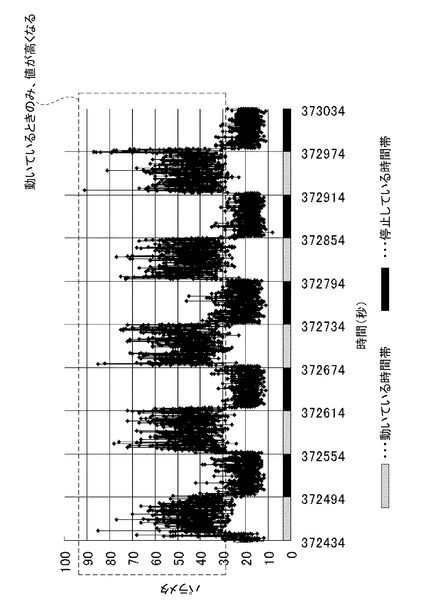
図2は、パラメーターの値と、受信機の停止状態及び移動状態と、を比較したグラフである。図2は、横軸に時間(秒)を表し、縦軸にはパラメーターの値とばらつきを時系列的に並べている。
【0029】
なお、パラメーターは、GPS衛星信号の所定時間mにおける信号強度と、所定時間mとは異なる期間の所定時間jにおける信号強度の差を算出し、この信号強度の差を所定期間にわたり累積した値として算出した値であって、次式によって表す。
【0030】
【数1】

【0031】
ここで、横軸の網目表示部分は受信機1が移動している場合を、黒塗り表示部分は受信機1が停止している状態を表している。例えば、372434秒〜372494秒の60秒間は移動、372494秒〜372554秒の60秒間は停止状態である。図2に示すように、受信機1が停止している間はパラメーターの値は小さく、受信機1が移動している間はパラメーターが大きくなっている。
【0032】
つまり、このパラメーターの大きさが受信機1の停止/移動状態と連動して変化することから、本パラメーターを用いて受信機1の停止/移動状態を判定することが可能となる。
パラメーターの値は、以下の手順で計算する。
【0033】
GPS衛星信号は、CDMA(Code Division Multiple Access)方式によって変調された1.57542[GHz]の通信信号であって、GPSアンテナ5によって受信し、RF受信回路部11内の分周器で130KHzまで分周され、分周されたままの同位相の信号i(t)と、信号i(t)を90度位相を進めた信号q(t)と、を生成する。レプリカ信号r(t)は、GPS受信部10内の生成波である。これら各信号を次式で表す。
【0034】
【数2】
【0035】
そして、受信信号と同位相の信号i(t)とレプリカ信号r(t)とを合成してI(t)とし、90度位相を進めた信号q(t)とレプリカ信号r(t)とを合成してQ(t)とし、ベースバンド処理回路部20に出力する。I(t)及びQ(t)は以下の数式で定義する。
【0036】
【数3】
【0037】
但し、I(t)、Q(t)のインプットはFW(またはHW)でのサンプリングの時間列としている。時間列は次式の通り。
【0038】
【数4】
【0039】
このときのI(t)、Q(t)の性質をみるために、まず、レプリカ生成波の周波数差成分Δf、位相差成分Δθを定義する。
【0040】
【数5】
【0041】
まず、I(t)について計算する。数式3の積分の中身を計算する。i(t)×r(t)を計算すると、次式のように展開できる。
【0042】
【数6】
【0043】
従って、i(tn)は、次式のように表すことができる。
【0044】
【数7】
【0045】
ここで、第1項の分母(f0+f1)は、130KHzの2倍の260KHz前後であることに対して、第2項の分母(f0−f1)は100Hz以下とみなせるので、I(tn)の計算の第1項は無視できる程度に小さい値と扱っても問題はないと判断する。
よって、I(tn)は、次式で表すことができる。
【0046】
【数8】
【0047】
ここで、数式8の掛け算の2個目の分数部分は、サンプリング周期(tn+1−tn)が、周波数に対して十分小さい場合には、sin(2πΔft+Δθ)をtで微分した形で近似できる。よって、I(tn)は次式で表すことができる。
【0048】
【数9】
【0049】
Q(t)についてもI(t)と同様な計算をする。まず、数式3の積分の中身(q(t)×r(t))を計算すると次式の通りとなる。
【0050】
【数10】
【0051】
Q(t)についてもI(t)と同様に計算すると次式が得られる。
【0052】
【数11】
【0053】
以上、数式2ないし数式11をまとめると、I(tn)及びQ(tn)は次式のように表すことができる。
【0054】
【数12】
【0055】
この数式における「C」を、または信号強度の相関値と表し、数式上では「Amp」と表すことがある。
【0056】
本実施形態におけるパラメーターの計算のためには、GPS衛星信号の所定時間m(または所定時間j)における信号強度を用いてI(tn)及びQ(tn)が計測されるので、I(tn)をSumI、Q(tn)をSumQに置き換えると、Amplitudeを次式で表すことができる。
【0057】
【数13】
【0058】
ここで、所定時間m=所定時間j=20msecとすれば、SumI、SumQを10msec相当の値に変換して計算していることになる。
【0059】
上述したように計算した信号強度の相関値(amplitude)を用いてパラメーター(数式1、参照)を算出する。たとえば、所定時間m=所定時間jとし、累積所定期間を1秒間とした場合、今回受信した母集団の信号強度amplitude(k+1)と前回受信した母集団の信号強度amplitudekの差を所定期間1秒間にわたり累積した値をパラメーターとしている。
(停止/移動判定方法)
【0060】
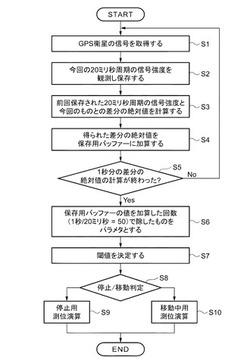
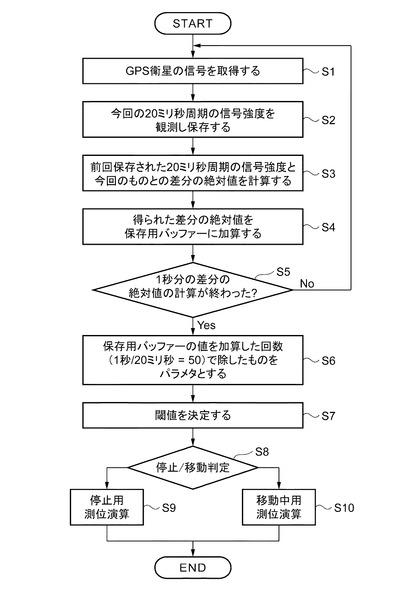
図3は、停止/移動判定方法における判定処理の流れを示すフローチャートである。なお、受信信号を取得する所定時間m,jを共に20msec、信号強度の差を累積する所定期間を1秒間として説明する。
まず、GPS衛星の信号をRF受信回路部11で取得する(ステップ:S1)。RF受信回路部11では、GPSアンテナ5から入力されたRF信号をA/D変換器でデジタル信号に変換し、受信信号と同位相の信号i(t)と、90度位相を進めた信号q(t)と、を生成する。
【0061】
そして、信号i(t)とレプリカ信号r(t)とを合成してI(t)とし、90度位相を進めた信号q(t)とレプリカ信号r(t)とを合成してQ(t)とし、I(t)とQ(t)とをベースバンド処理回路部20に出力する。
【0062】
次に、今回(直近で)取得した20msec周期の信号強度I(tn)及びQ(tn)を観測し、保存する(ステップ:S2)。
そして、前回保存された20msec周期の信号強度I(tn)及びQ(tn)を観測し、今回取得した信号強度と前回取得した信号強度の差の絶対値を計算する(ステップ:S3)。
そして、信号強度の差分の絶対値の1秒分を保存用バッファーに加算(累積)する(ステップ:S4)。
【0063】
次に、1秒分の差分の絶対値の加算が終わったかどうかを判断する(ステップ:S5)。加算が終了していない(No)場合はステップ:S1からステップ:S4を実行し、加算が終了している(Yes)場合には次のステップ:S6を実行する。
【0064】
ステップ:S6では、保存用バッファーの値を加算(累積)した回数(n:整数)で除してパラメーターを決定する。本例では、20msec周期信号を取得しており、加算(累積)時間を1秒間としているため、加算回数n=1/20msec=50(回)である。このことは、数式1で表される。
【0065】
そして、受信機1が停止状態か移動状態かの判定を行うための閾値を決定し(ステップ:S7)、パラメーターと閾値を比較して受信機1の停止/移動判定を行う(ステップ:8)。たとえば、パラメーター≧閾値の場合には移動状態、パラメーター<閾値の場合には停止状態にあると判定する。
【0066】
受信機1が停止状態と判定した場合には、停止用の測位演算を行い(ステップ:S9)、移動状態の場合には、移動中用測位演算を行う(ステップ:S10)。
【0067】
なお、閾値の決定方法には、経験的に速度とパラメーターとから閾値を予め決定しておく方法と、統計的手法を用いて閾値を決定する方法とがある。よって、これらの実施例をあげ説明する。
(実施例1)
【0068】
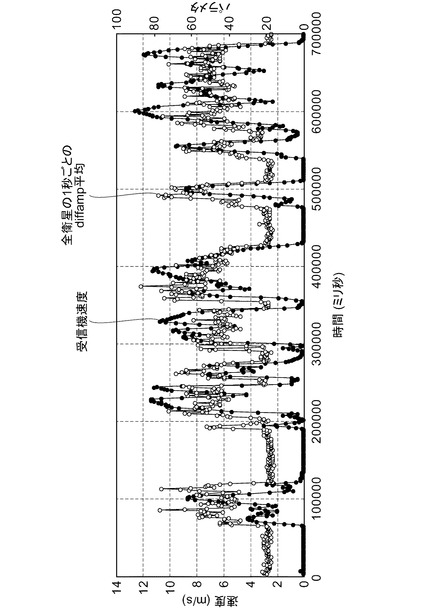
図4は、実施例1に係るパラメーター速度の関係の1例を時系列的に表したグラフ、図5は、図4の結果から決定した閾値を用いた停止/移動判定の結果を表している。
図4において、横軸は時間(ミリ秒)、左縦軸は移動速度(m/s)、右縦軸はパラメーターである。速度は、GPS衛星からの受信信号を用いて算出した速度であって、パラメーターは全GPS衛星の1秒毎のamplitudeの差の平均値を表している。図4の二つのデータから、速度と1秒毎のamplitudeの差の平均値とがほぼ相関関係にあることから、停止状態と移動状態と判定可能な閾値を見出せることが推定できる。
【0069】
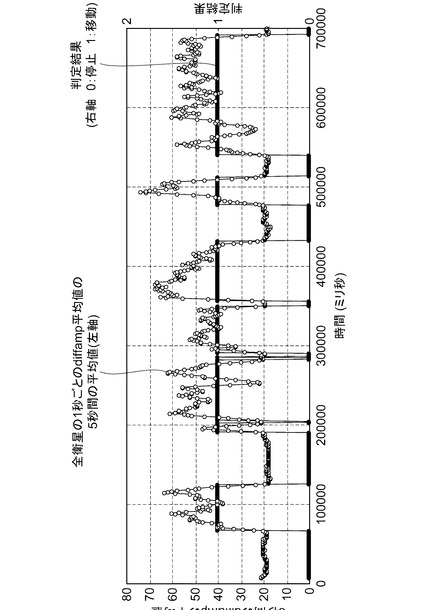
そこで、図4に表された信号強度の差を累積する所定期間として1秒毎のamplitudeの差の平均値を、5秒間のamplitudeの差の平均値に展開し図5に表す。左縦軸に5秒間のamplitudeの差(diffamp)の平均値、右縦軸は判定結果を表している。図5に示す例では、全GPS衛星の1秒毎のamplitudeの差の平均値の20付近においては、この値の変動が小さく停止している状態と判定できる。また、この値が大きく変動している領域は移動していると判定できる。そこで、閾値を20とし、20付近を判定結果「0」、20以上の領域では、ピーク値と閾値とのほぼ中間値を「1」と2値化して判定する。つまり「0」の場合は停止状態、「1」の場合は移動状態と判定する。ただし、閾値は、移動速度とパラメーターの値とから、停止状態と移動状態が最も判定し易い値を閾値と決定すればよい。
(実施例2)
【0070】
次に、閾値の決定方法に係る実施例2について説明する。実施例2は、前述した実施例1が、経験的に移動速度とパラメーターとから閾値を決定する方法であることに対し、統計的手法を用いて閾値を決定する方法である。
【0071】
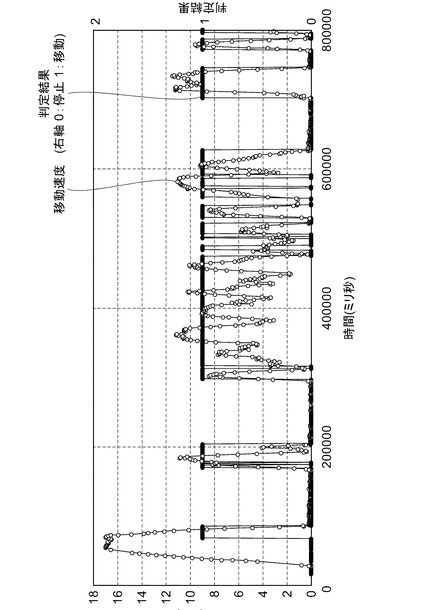
図6は、実施例2に係るパラメーター速度の関係の1例を時系列的に表したグラフである。横軸は時間(ミリ秒)、左縦軸は移動速度(m/s)、右縦軸は判定結果を表している。本実施例における閾値は、停止している場合のパラメーターの母集団と、移動している場合のパラメーターの母集団と、これら両母集団の共分散行列からマハラノビス距離を計算して、決定される。なお、この計算は、信号強度の差を累積する所定期間として5秒毎の値を用いている。
【0072】
図6に示すように、移動速度に対して、マハラノビス距離を算出して得られた閾値を用いて停止/移動の判定を行い、「0」の場合を停止、「1」の場合を移動と判定することができる。
【0073】
なお、信号強度の差を累積する所定期間は、図5、図6に示すように、1秒間ないし5秒間であることがより好ましい。これは、図6に示すように、5秒間以上では、停止/移動判定結果に遅延がでることがあるためである。
【0074】
以上説明した停止/移動判定方法によれば、GPS衛星信号の所定時間mにおける信号強度と、所定時間m以外の所定時間jにおける信号強度との差からパラメーターを算出し、停止状態であるか、移動状態であるかの判定基準である閾値と比較することで、例えば、パラメーター≧閾値の場合は移動状態、パラメーター<閾値の場合は停止状態と判定する。従って、加速度センサー等の外部センサーを備えなくても停止状態か、または移動状態かを的確に判定することができる。
【0075】
また、実測結果から算出した移動速度とパラメーターの値とから、停止状態と移動状態の判定可能な閾値を予め決定しておくことにより、経験的に、停止状態か移動常態かを判別できる最も適切な値に閾値を予め決定しておけば、閾値を容易に決定できる。
【0076】
また、停止している場合のパラメーターの母集団と、移動している場合のパラメーターの母集団と、これら両母集団の共分散行列からマハラノビス距離を統計処理によって計算し、閾値を決定すれば、より正確に停止状態か、移動常態化を判定することができる。また、受信環境の悪い地域や場所であっても適切な閾値を決定することができる。
【0077】
さらに、信号強度の差を累積する所定期間は、1秒間ないし5秒間の範囲にすることによって、停止/移動判定結果に遅延がでることを排除し、ほぼリアルタイムに停止/移動判定をすることを可能にする。
【0078】
なお、前述した実施の形態では、電子機器の一つである携帯型電話機に本発明を適用した例をあげて説明したが、例えば、カーナビゲーション装置や携帯型ナビゲーション装置、パソコン、PDA(Personal Digital Assistant)、腕時計等の他の電子機器についても同様に適用することができる。
【0079】
また、本実施の形態では、衛星測位システムの一種であるGPSを適用したものを例示して説明したが、WAAS(Wide Area Augmentation System)、QZSS(Quasi Zenith Satellite System)、GLONASS(GLObal NAvigation Satellite System)、GALILEO等の衛星測位システムであってもよい。
【符号の説明】
【0080】
1…受信機(携帯型電話機)、5…GPSアンテナ、10…GPS受信部、11…RF受信回路部、20…ベースバンド処理回路部。
【技術分野】
【0001】
本発明は、受信機を備える移動体の停止/移動判定方法に関する。
【背景技術】
【0002】
従来、GPS受信機を備える移動体が停止状態にあるか、移動状態にあるかを判定する方法としては、測位演算の結果として得られた移動体の速度を用いるのが一般的であった。しかし、この方法では測位精度が演算結果の速度に影響を及ぼして停止/移動判定を正確にできないことが考えられる。
そのために、移動体に加速度センサーを備え、移動体の停止または移動について加速度センサーの検出値適合範囲(閾値)を設定し、加速度センサーの検出値との差を演算して移動体が停止状態にあるか移動状態にあるかを判定する方法が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−117147号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した特許文献1に係る停止/移動判定方法では、加速度センサーの検出値を用いている。よって、加速度センサーに代表される外部センサーを備えていない場合には、的確な停止/移動判定はできず、そのような場合には、前述したような測位演算の結果として得られた移動体の速度を用いるという従来の方法を用いなければならない。従って、このような方法では、衛星信号の受信環境変化による測位精度の変動によって速度精度に影響を及ぼし、停止/移動判定を正確にできないという課題を有する。
【課題を解決するための手段】
【0005】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
【0006】
[適用例1]本適用例に係る停止/移動判定方法は、衛星信号を受信することと、前記衛星信号の所定時間mにおける信号強度を保存することと、前記所定時間mとは異なる期間の所定時間jにおける信号強度を保存することと、保存された前記所定時間mにおける信号強度及び前記所定時間jにおける信号強度の差を計算することと、前記信号強度の差を所定期間にわたり累積した値をパラメーターとして算出することと、閾値を決定することと、前記パラメーターと前記閾値とを比較し、移動体が停止状態か移動状態かを判定することと、を含むことを特徴とする。
【0007】
本適用例によれば、衛星信号の所定時間mにおける信号強度と、所定時間jにおける信号強度との差からパラメーターを算出し、移動体が停止状態であるか、移動状態であるかの判定基準である閾値と比較することで、例えば、パラメーター≧閾値の場合は移動状態、パラメーター<閾値の場合は停止状態と判定する。従って、加速度センサー等の外部センサーを備えなくても、また、受信環境の変化による測位演算の影響なしに、停止状態か移動状態かを的確に判定することができる。
【0008】
[適用例2]上記適用例に係る停止/移動判定方法において、前記閾値を決定することは、前記移動体が停止している場合の前記パラメーターの母集団と、前記移動体が移動している場合の前記パラメーターの母集団と、前記移動体が停止している場合の前記パラメーターの母集団及び前記移動体が移動している場合の前記パラメーターの母集団の共分散行列を用いてマハラノビス距離を計算すること、を含むことが好ましい。
【0009】
このように多変数間の相関に基づく統計的手法を用いて閾値を決定すれば、ほぼリアルタイムに、かつ正確に停止状態か、移動状態かを判定することができる。また、受信環境の悪い地域や場所であっても適切な閾値を決定することができる。
【0010】
[適用例3]上記適用例に係る停止/移動判定方法において、前記閾値を決定することは、前記移動体の移動速度と前記パラメーターの値とを用いて、前記移動体の停止状態と移動状態の判定可能な閾値を予め決定しておくこと、が好ましい。
【0011】
移動速度の大きさとパラメーターの値とをみて、停止状態か、移動状態かを判別できる値の閾値を予め決定しておけば、閾値を容易に決定できる。
【0012】
[適用例4]上記適用例に係る停止/移動判定方法において、前記信号強度の差を累積する所定期間は、1秒間ないし5秒間であること、が好ましい。
【0013】
信号強度の差を累積する所定期間を1秒間ないし5秒間にすれば、パラメーターの値が安定し、適切な停止/移動判定を行える。なお、5秒間以上では、停止/移動判定結果に遅延がでることがあるため避けた方がよい。
【図面の簡単な説明】
【0014】
【図1】携帯型電話機の機能構成の1例を示すブロック図。
【図2】パラメーターの値と、受信機の停止状態及び移動状態とを比較したグラフ。
【図3】停止/移動判定方法における判定処理の流れを示すフローチャート。
【図4】実施例1に係るパラメーター速度の関係の1例を時系列的に表したグラフ。
【図5】図4の結果から決定した閾値を用いた停止/移動判定の結果。
【図6】実施例2に係るパラメーター速度の関係の1例を時系列的に表したグラフ。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態を図面を参照して説明する。なお、本実施の形態では、衛星測位システムの一種であるGPS(Global Positioning System)を例示して説明する。
(機能構成)
【0016】
本実施形態では、受信機1の実施例として携帯型電話機をあげ説明する。
図1は、携帯型電話機の機能構成の1例を示すブロック図である。受信機1は、GPSアンテナ5と、GPS受信部10と、ホスト処理部30と、操作部40と、表示部50と、携帯電話用アンテナ60と、携帯電話用無線通信回路部70と、記憶部80と、時計部90とを備えて構成される。
【0017】
GPSアンテナ5は、複数のGPS衛星から発信されているGPS衛星信号を含むRF(Radio Frequency)信号を受信する受信点(アンテナ)であり、受信信号をGPS受信部10に出力する。
【0018】
GPS受信部10は、GPSアンテナ5から入力した信号に基づいて受信機1の位置、移動速度等を算出・演算する演算部分である。GPS受信部10は、RF受信回路部11とベースバンド処理回路部20とを備えて構成される。なお、RF受信回路部11と、ベースバンド処理回路部20とは、それぞれ別のLSI(Large Scale Integrated circuit)として構成することも、1チップとして構成することも可能である。
【0019】
RF受信回路部11は、RF信号の受信回路である。回路構成としては、例えば、GPSアンテナ5から出力されたRF信号をA/D変換器でデジタル信号に変換し、デジタル信号を処理する受信回路を構成してもよい。また、GPSアンテナ5から出力されたRF信号をアナログ信号のまま信号処理し、最終的にA/D変換することでデジタル信号をベースバンド処理回路部20に出力する構成としてもよい。
【0020】
ベースバンド処理回路部20は、RF受信回路部11から出力された受信信号に対して、キャリア除去や相関演算等を行ってGPS衛星信号を捕捉する。そして、捕捉したGPS衛星信号から抽出した時刻情報や衛星軌道情報等を利用して、受信機1の位置及び時計誤差を算出する。
【0021】
ホスト処理部30は、記憶部80に記憶されているシステムプログラム等の各種プログラムに従って受信機1の各部を統括的に制御するプロセッサーであり、CPU(Central Processing Unit)等のプロセッサーを有している。ホスト処理部30は、ベースバンド処理回路部20から取得した位置座標をもとに、表示部50に現在位置を指し示した地図を表示させたり、その位置座標を各種のアプリケーション処理に利用する。
【0022】
操作部40は、例えばタッチパネルやボタンスイッチ等により構成される入力装置であり、押下されたキーやボタンスイッチの信号をホスト処理部30に出力する。この操作部40の操作により、通話要求やメール送受信要求、位置算出要求等の各種指示入力がなされる。
【0023】
表示部50は、LCD(Liquid Crystal Display)等により構成され、ホスト処理部30から入力される表示信号に基づいた各種表示を行う表示装置である。表示部50には、位置表示画面や時刻情報等が表示される。
【0024】
携帯電話用アンテナ60は、受信機1の通信サービス事業者が設置した無線基地局との間で携帯電話用無線信号の送受信を行うアンテナである。
【0025】
携帯電話用無線通信回路部70は、RF変換回路、ベースバンド処理回路等によって構成される携帯電話の通信回路部であり、携帯電話用無線信号の変調・復調等を行うことで、通話やメールの送受信等を実現する。
【0026】
記憶部80は、ROM(Read Only Memory)やフラッシュROM、RAM(Random Access Memory)等の記憶装置を有して構成され、ホスト処理部30が受信機1を制御するためのシステムプログラムや、各種アプリケーション処理を実行するための各種プログラムやデータ等を記憶する。
【0027】
時計部90は、受信機1の内部時計であり、水晶振動子及び発振回路でなる水晶発振器等を有して構成される。時計部90の計時時刻は、ベースバンド処理回路部20及びホスト処理部30に随時出力される。時計部90は、ベースバンド処理回路部20により算出された時計誤差を用いて較正される。
(原理)
【0028】
続いて、本実施形態における停止/移動判定方法に係る原理について説明する。まず、停止状態と移動状態とで実測値から算出したパラメーターの値を比較してみる。
図2は、パラメーターの値と、受信機の停止状態及び移動状態と、を比較したグラフである。図2は、横軸に時間(秒)を表し、縦軸にはパラメーターの値とばらつきを時系列的に並べている。
【0029】
なお、パラメーターは、GPS衛星信号の所定時間mにおける信号強度と、所定時間mとは異なる期間の所定時間jにおける信号強度の差を算出し、この信号強度の差を所定期間にわたり累積した値として算出した値であって、次式によって表す。
【0030】
【数1】
【0031】
ここで、横軸の網目表示部分は受信機1が移動している場合を、黒塗り表示部分は受信機1が停止している状態を表している。例えば、372434秒〜372494秒の60秒間は移動、372494秒〜372554秒の60秒間は停止状態である。図2に示すように、受信機1が停止している間はパラメーターの値は小さく、受信機1が移動している間はパラメーターが大きくなっている。
【0032】
つまり、このパラメーターの大きさが受信機1の停止/移動状態と連動して変化することから、本パラメーターを用いて受信機1の停止/移動状態を判定することが可能となる。
パラメーターの値は、以下の手順で計算する。
【0033】
GPS衛星信号は、CDMA(Code Division Multiple Access)方式によって変調された1.57542[GHz]の通信信号であって、GPSアンテナ5によって受信し、RF受信回路部11内の分周器で130KHzまで分周され、分周されたままの同位相の信号i(t)と、信号i(t)を90度位相を進めた信号q(t)と、を生成する。レプリカ信号r(t)は、GPS受信部10内の生成波である。これら各信号を次式で表す。
【0034】
【数2】
【0035】
そして、受信信号と同位相の信号i(t)とレプリカ信号r(t)とを合成してI(t)とし、90度位相を進めた信号q(t)とレプリカ信号r(t)とを合成してQ(t)とし、ベースバンド処理回路部20に出力する。I(t)及びQ(t)は以下の数式で定義する。
【0036】
【数3】
【0037】
但し、I(t)、Q(t)のインプットはFW(またはHW)でのサンプリングの時間列としている。時間列は次式の通り。
【0038】
【数4】
【0039】
このときのI(t)、Q(t)の性質をみるために、まず、レプリカ生成波の周波数差成分Δf、位相差成分Δθを定義する。
【0040】
【数5】
【0041】
まず、I(t)について計算する。数式3の積分の中身を計算する。i(t)×r(t)を計算すると、次式のように展開できる。
【0042】
【数6】
【0043】
従って、i(tn)は、次式のように表すことができる。
【0044】
【数7】
【0045】
ここで、第1項の分母(f0+f1)は、130KHzの2倍の260KHz前後であることに対して、第2項の分母(f0−f1)は100Hz以下とみなせるので、I(tn)の計算の第1項は無視できる程度に小さい値と扱っても問題はないと判断する。
よって、I(tn)は、次式で表すことができる。
【0046】
【数8】
【0047】
ここで、数式8の掛け算の2個目の分数部分は、サンプリング周期(tn+1−tn)が、周波数に対して十分小さい場合には、sin(2πΔft+Δθ)をtで微分した形で近似できる。よって、I(tn)は次式で表すことができる。
【0048】
【数9】
【0049】
Q(t)についてもI(t)と同様な計算をする。まず、数式3の積分の中身(q(t)×r(t))を計算すると次式の通りとなる。
【0050】
【数10】
【0051】
Q(t)についてもI(t)と同様に計算すると次式が得られる。
【0052】
【数11】
【0053】
以上、数式2ないし数式11をまとめると、I(tn)及びQ(tn)は次式のように表すことができる。
【0054】
【数12】
【0055】
この数式における「C」を、または信号強度の相関値と表し、数式上では「Amp」と表すことがある。
【0056】
本実施形態におけるパラメーターの計算のためには、GPS衛星信号の所定時間m(または所定時間j)における信号強度を用いてI(tn)及びQ(tn)が計測されるので、I(tn)をSumI、Q(tn)をSumQに置き換えると、Amplitudeを次式で表すことができる。
【0057】
【数13】
【0058】
ここで、所定時間m=所定時間j=20msecとすれば、SumI、SumQを10msec相当の値に変換して計算していることになる。
【0059】
上述したように計算した信号強度の相関値(amplitude)を用いてパラメーター(数式1、参照)を算出する。たとえば、所定時間m=所定時間jとし、累積所定期間を1秒間とした場合、今回受信した母集団の信号強度amplitude(k+1)と前回受信した母集団の信号強度amplitudekの差を所定期間1秒間にわたり累積した値をパラメーターとしている。
(停止/移動判定方法)
【0060】
図3は、停止/移動判定方法における判定処理の流れを示すフローチャートである。なお、受信信号を取得する所定時間m,jを共に20msec、信号強度の差を累積する所定期間を1秒間として説明する。
まず、GPS衛星の信号をRF受信回路部11で取得する(ステップ:S1)。RF受信回路部11では、GPSアンテナ5から入力されたRF信号をA/D変換器でデジタル信号に変換し、受信信号と同位相の信号i(t)と、90度位相を進めた信号q(t)と、を生成する。
【0061】
そして、信号i(t)とレプリカ信号r(t)とを合成してI(t)とし、90度位相を進めた信号q(t)とレプリカ信号r(t)とを合成してQ(t)とし、I(t)とQ(t)とをベースバンド処理回路部20に出力する。
【0062】
次に、今回(直近で)取得した20msec周期の信号強度I(tn)及びQ(tn)を観測し、保存する(ステップ:S2)。
そして、前回保存された20msec周期の信号強度I(tn)及びQ(tn)を観測し、今回取得した信号強度と前回取得した信号強度の差の絶対値を計算する(ステップ:S3)。
そして、信号強度の差分の絶対値の1秒分を保存用バッファーに加算(累積)する(ステップ:S4)。
【0063】
次に、1秒分の差分の絶対値の加算が終わったかどうかを判断する(ステップ:S5)。加算が終了していない(No)場合はステップ:S1からステップ:S4を実行し、加算が終了している(Yes)場合には次のステップ:S6を実行する。
【0064】
ステップ:S6では、保存用バッファーの値を加算(累積)した回数(n:整数)で除してパラメーターを決定する。本例では、20msec周期信号を取得しており、加算(累積)時間を1秒間としているため、加算回数n=1/20msec=50(回)である。このことは、数式1で表される。
【0065】
そして、受信機1が停止状態か移動状態かの判定を行うための閾値を決定し(ステップ:S7)、パラメーターと閾値を比較して受信機1の停止/移動判定を行う(ステップ:8)。たとえば、パラメーター≧閾値の場合には移動状態、パラメーター<閾値の場合には停止状態にあると判定する。
【0066】
受信機1が停止状態と判定した場合には、停止用の測位演算を行い(ステップ:S9)、移動状態の場合には、移動中用測位演算を行う(ステップ:S10)。
【0067】
なお、閾値の決定方法には、経験的に速度とパラメーターとから閾値を予め決定しておく方法と、統計的手法を用いて閾値を決定する方法とがある。よって、これらの実施例をあげ説明する。
(実施例1)
【0068】
図4は、実施例1に係るパラメーター速度の関係の1例を時系列的に表したグラフ、図5は、図4の結果から決定した閾値を用いた停止/移動判定の結果を表している。
図4において、横軸は時間(ミリ秒)、左縦軸は移動速度(m/s)、右縦軸はパラメーターである。速度は、GPS衛星からの受信信号を用いて算出した速度であって、パラメーターは全GPS衛星の1秒毎のamplitudeの差の平均値を表している。図4の二つのデータから、速度と1秒毎のamplitudeの差の平均値とがほぼ相関関係にあることから、停止状態と移動状態と判定可能な閾値を見出せることが推定できる。
【0069】
そこで、図4に表された信号強度の差を累積する所定期間として1秒毎のamplitudeの差の平均値を、5秒間のamplitudeの差の平均値に展開し図5に表す。左縦軸に5秒間のamplitudeの差(diffamp)の平均値、右縦軸は判定結果を表している。図5に示す例では、全GPS衛星の1秒毎のamplitudeの差の平均値の20付近においては、この値の変動が小さく停止している状態と判定できる。また、この値が大きく変動している領域は移動していると判定できる。そこで、閾値を20とし、20付近を判定結果「0」、20以上の領域では、ピーク値と閾値とのほぼ中間値を「1」と2値化して判定する。つまり「0」の場合は停止状態、「1」の場合は移動状態と判定する。ただし、閾値は、移動速度とパラメーターの値とから、停止状態と移動状態が最も判定し易い値を閾値と決定すればよい。
(実施例2)
【0070】
次に、閾値の決定方法に係る実施例2について説明する。実施例2は、前述した実施例1が、経験的に移動速度とパラメーターとから閾値を決定する方法であることに対し、統計的手法を用いて閾値を決定する方法である。
【0071】
図6は、実施例2に係るパラメーター速度の関係の1例を時系列的に表したグラフである。横軸は時間(ミリ秒)、左縦軸は移動速度(m/s)、右縦軸は判定結果を表している。本実施例における閾値は、停止している場合のパラメーターの母集団と、移動している場合のパラメーターの母集団と、これら両母集団の共分散行列からマハラノビス距離を計算して、決定される。なお、この計算は、信号強度の差を累積する所定期間として5秒毎の値を用いている。
【0072】
図6に示すように、移動速度に対して、マハラノビス距離を算出して得られた閾値を用いて停止/移動の判定を行い、「0」の場合を停止、「1」の場合を移動と判定することができる。
【0073】
なお、信号強度の差を累積する所定期間は、図5、図6に示すように、1秒間ないし5秒間であることがより好ましい。これは、図6に示すように、5秒間以上では、停止/移動判定結果に遅延がでることがあるためである。
【0074】
以上説明した停止/移動判定方法によれば、GPS衛星信号の所定時間mにおける信号強度と、所定時間m以外の所定時間jにおける信号強度との差からパラメーターを算出し、停止状態であるか、移動状態であるかの判定基準である閾値と比較することで、例えば、パラメーター≧閾値の場合は移動状態、パラメーター<閾値の場合は停止状態と判定する。従って、加速度センサー等の外部センサーを備えなくても停止状態か、または移動状態かを的確に判定することができる。
【0075】
また、実測結果から算出した移動速度とパラメーターの値とから、停止状態と移動状態の判定可能な閾値を予め決定しておくことにより、経験的に、停止状態か移動常態かを判別できる最も適切な値に閾値を予め決定しておけば、閾値を容易に決定できる。
【0076】
また、停止している場合のパラメーターの母集団と、移動している場合のパラメーターの母集団と、これら両母集団の共分散行列からマハラノビス距離を統計処理によって計算し、閾値を決定すれば、より正確に停止状態か、移動常態化を判定することができる。また、受信環境の悪い地域や場所であっても適切な閾値を決定することができる。
【0077】
さらに、信号強度の差を累積する所定期間は、1秒間ないし5秒間の範囲にすることによって、停止/移動判定結果に遅延がでることを排除し、ほぼリアルタイムに停止/移動判定をすることを可能にする。
【0078】
なお、前述した実施の形態では、電子機器の一つである携帯型電話機に本発明を適用した例をあげて説明したが、例えば、カーナビゲーション装置や携帯型ナビゲーション装置、パソコン、PDA(Personal Digital Assistant)、腕時計等の他の電子機器についても同様に適用することができる。
【0079】
また、本実施の形態では、衛星測位システムの一種であるGPSを適用したものを例示して説明したが、WAAS(Wide Area Augmentation System)、QZSS(Quasi Zenith Satellite System)、GLONASS(GLObal NAvigation Satellite System)、GALILEO等の衛星測位システムであってもよい。
【符号の説明】
【0080】
1…受信機(携帯型電話機)、5…GPSアンテナ、10…GPS受信部、11…RF受信回路部、20…ベースバンド処理回路部。
【特許請求の範囲】
【請求項1】
衛星信号を受信することと、
前記衛星信号の所定時間mにおける信号強度を保存することと、
前記所定時間mとは異なる期間の所定時間jにおける信号強度を保存することと、
保存された前記所定時間mにおける信号強度及び前記所定時間jにおける信号強度の差を計算することと、
前記信号強度の差を所定期間にわたり累積した値をパラメーターとして算出することと、
閾値を決定することと、
前記パラメーターと前記閾値とを比較し、移動体が停止状態か移動状態かを判定することと、
を含むことを特徴とする停止/移動判定方法。
【請求項2】
前記閾値を決定することは、
前記移動体が停止している場合の前記パラメーターの母集団と、前記移動体が移動している場合の前記パラメーターの母集団と、前記移動体が停止している場合の前記パラメーターの母集団及び前記移動体が移動している場合の前記パラメーターの母集団の共分散行列を用いてマハラノビス距離を計算すること、
を含む請求項1に記載の停止/移動判定方法。
【請求項3】
前記閾値を決定することは、
前記移動体の移動速度と前記パラメーターの値とを用いて、前記移動体の停止状態と移動状態の判定可能な閾値を予め決定しておくこと、
を特徴とする請求項1に記載の停止/移動判定方法。
【請求項4】
前記信号強度の差を累積する所定期間は、1秒間ないし5秒間であること、
を特徴とする請求項1ないし請求項3に記載の停止/移動判定方法。
【請求項1】
衛星信号を受信することと、
前記衛星信号の所定時間mにおける信号強度を保存することと、
前記所定時間mとは異なる期間の所定時間jにおける信号強度を保存することと、
保存された前記所定時間mにおける信号強度及び前記所定時間jにおける信号強度の差を計算することと、
前記信号強度の差を所定期間にわたり累積した値をパラメーターとして算出することと、
閾値を決定することと、
前記パラメーターと前記閾値とを比較し、移動体が停止状態か移動状態かを判定することと、
を含むことを特徴とする停止/移動判定方法。
【請求項2】
前記閾値を決定することは、
前記移動体が停止している場合の前記パラメーターの母集団と、前記移動体が移動している場合の前記パラメーターの母集団と、前記移動体が停止している場合の前記パラメーターの母集団及び前記移動体が移動している場合の前記パラメーターの母集団の共分散行列を用いてマハラノビス距離を計算すること、
を含む請求項1に記載の停止/移動判定方法。
【請求項3】
前記閾値を決定することは、
前記移動体の移動速度と前記パラメーターの値とを用いて、前記移動体の停止状態と移動状態の判定可能な閾値を予め決定しておくこと、
を特徴とする請求項1に記載の停止/移動判定方法。
【請求項4】
前記信号強度の差を累積する所定期間は、1秒間ないし5秒間であること、
を特徴とする請求項1ないし請求項3に記載の停止/移動判定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−36958(P2013−36958A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−175645(P2011−175645)
【出願日】平成23年8月11日(2011.8.11)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月11日(2011.8.11)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]