
停車時後退防止装置
【課題】運転者がアクセル操作により登坂路停車を行おうとした場合でも、自動ブレーキにより当該登坂路停車を実行させて、自動変速機内のクラッチ寿命を延ばす。
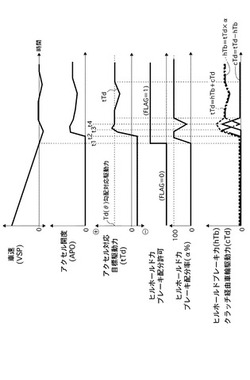
【解決手段】登坂路走行中アクセルを釈放し、ブレーキ操作なしに車両を、車速VSPが図示のごとく低下するよう減速させ、t1に車速VS=0の停車状態となり、その後t2より、運転者が図示のアクセル開度APOによって停車状態を維持しようとした場合、アクセル対応目標駆動力tTdが勾配対応駆動力Td(θ)以下であるt3までは、ヒルホールド力ブレーキ配分率αを100%に向け一定の時間変化割合で増大させ、t3〜t4間におけるごとくtTd≧Td(θ)であれば、αを一定の時間変化割合で0%へと低下させる。よって、ヒルホールドブレーキ力hTb=tTd×α、および、クラッチ経由車輪駆動力cTd=tTd−hTbはそれぞれ図示のごときものとなり、アクセル操作により登坂路停車を行おうとした場合でも、ヒルホールドブレーキ力hTbにより登坂路停車が可能である。
【解決手段】登坂路走行中アクセルを釈放し、ブレーキ操作なしに車両を、車速VSPが図示のごとく低下するよう減速させ、t1に車速VS=0の停車状態となり、その後t2より、運転者が図示のアクセル開度APOによって停車状態を維持しようとした場合、アクセル対応目標駆動力tTdが勾配対応駆動力Td(θ)以下であるt3までは、ヒルホールド力ブレーキ配分率αを100%に向け一定の時間変化割合で増大させ、t3〜t4間におけるごとくtTd≧Td(θ)であれば、αを一定の時間変化割合で0%へと低下させる。よって、ヒルホールドブレーキ力hTb=tTd×α、および、クラッチ経由車輪駆動力cTd=tTd−hTbはそれぞれ図示のごときものとなり、アクセル操作により登坂路停車を行おうとした場合でも、ヒルホールドブレーキ力hTbにより登坂路停車が可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両が登坂路停車時に後退するのを、運転者のアクセル操作によって防止するようにした型式の停車時後退防止装置に関するものである。
【背景技術】
【0002】
登坂路停車状態からの発進に際し、停車状態を保つためブレーキペダルを踏んでいた足をアクセルペダルに踏み替える時、車両は重力により自然後退する。
かかる登坂路での自然後退を防止する停車時後退防止技術としては従来、例えば特許文献1に記載のごときものが知られている。
【0003】
この停車時後退防止技術は所謂ヒルホールド技術と称せられるもので、
登坂路停車状態を、車輪駆動系におけるクラッチなど断接手段の解放と、ブレーキアクチュエータによる自動ブレーキ(ヒルホールドブレーキ)とで達成し、
上記の発進に際しては、断接手段の締結進行(伝達トルク容量の増大)と、ブレーキアクチュエータによる自動ブレーキ力(ヒルホールドブレーキ力)の低下とにより、動力源からの正トルクが車輪に向かうようにして、車両の後退を伴うことなく当該発進を可能にしたものである。
【特許文献1】特許第3301296号明細書
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、運転者がアクセル操作により登坂路での停車状態を維持しようとするとき、上記のものに代表される従来の停車時後退防止技術は対応しておらず、
結果として、運転者のアクセル操作に応じて運転される動力源の出力トルクのうち、後退防止用に必要なトルク分だけが車輪に向かい、残余のトルクは上記断接手段のスリップにより消失させることによって、登坂路停車時の後退防止を遂行することになる。
【0005】
このため、運転者がアクセル操作により登坂路停車時の後退防止を行おうとするとき、断接手段のスリップ制御が不可欠で、上記残余トルクの消失による燃費の悪化を招くだけでなく、断接手段のスリップに伴う発熱や摩耗で耐久性が低下するという問題も生ずる。
【0006】
なお、登坂路停車時の後退防止に当たっては、路面勾配を検出し、検出した路面勾配下で後退防止を実現可能な自動ブレーキ力(ヒルホールドブレーキ力)を求め、このブレーキ力が発生するようブレーキアクチュエータによりブレーキ装置を作動させることが考えられる。
【0007】
しかしこの場合、登坂路停車時で後退防止用のアクセル操作を行っていないのに車両が後退を防止され、運転者に違和感を与える。
【0008】
本発明は、後者の問題回避のため、あくまで、運転者がアクセル操作によって登坂路停車時の後退防止を実現するようにした型式の停車時後退防止装置を前提とし、
それにもかかわらず、燃費の悪化や、車輪駆動系における断接手段の耐久性(発熱、摩耗)に関する前者の問題を生ずることのないようにした停車時後退防止装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
この目的のため、本発明による停車時後退防止装置は、請求項1に記載したごとくに構成する。
先ず前提となる車両を説明するに、
動力源および車輪間の車輪駆動系に伝達トルク容量可変式の断接手段を具え、
運転者のブレーキ操作とは別にブレーキユニットを作動させて車輪制動力を発生させる自動ブレーキ手段を有し、
運転者のアクセル操作に対応するアクセル対応目標車輪駆動力をもとに、前記動力源の出力および断接手段の伝達トルク容量を決定するようにした車両を要旨構成の基礎前提とする。
【0010】
本発明の停車時後退防止装置は、かかる車両に対し、
運転者がアクセル操作により、車両の対地速度が零以下の停車状態を希望する間、該アクセル操作に応じて前記自動ブレーキ手段による車輪の停車用自動ブレーキ力を決定する停車用自動ブレーキ力決定手段と、
前記停車中のアクセル操作に対応するアクセル対応目標車輪駆動力から、前記停車用自動ブレーキ力を差し引いて得られる差値を、前記動力源の停車時出力および前記断接手段の停車時伝達トルク容量とする停車時車輪駆動力決定手段とを具備してなることを特徴とするものである。
【発明の効果】
【0011】
上記した本発明による停車時後退防止装置によれば、
停車中のアクセル操作に応じた停車用自動ブレーキ力により停車状態を達成して後退防止を実現するため、
アクセル操作により停車状態(後退防止)を実現するといえども、車輪駆動系の断接手段をスリップ制御はアクセル操作対応駆動力の一時的な過剰分を逃がす程度の僅かなものでよく、断接手段のスリップに伴う燃費の悪化や、耐久性(発熱および摩耗)の低下に関する問題をほとんど生ずることがない。
【0012】
また、上記の後退防止制御が停車中のアクセル操作に呼応して行われることから、
何らかの後退防止操作が必要な登坂路停車中で、何ら後退防止用の操作を行っていないのに車両が後退を防止される違和感を運転者に与えることもない。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施の形態を、図面に示す実施例に基づき詳細に説明する。
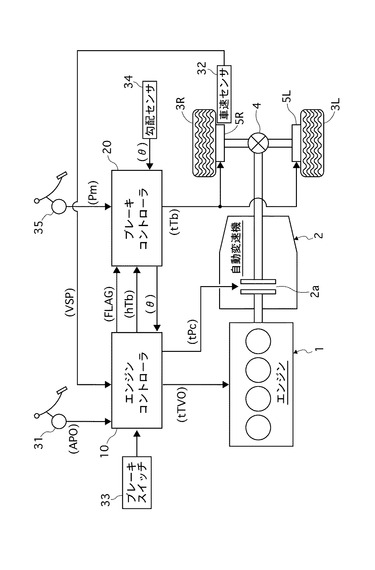
図1は、本発明の一実施例になる停車時後退防止装置を具えたフロントエンジン・リヤホイールドライブ車両のパワートレーンを、その制御系とともに示し、
1は、動力源としてのエンジン、2は自動変速機、3L,3Rは左右駆動車輪、4はディファレンシャルギヤ装置である。
【0014】
自動変速機2は一般的な歯車変速機構よりなるものであるが、トルクコンバータを内蔵せず、車輪駆動系における伝達トルク容量可変式断接手段の用をなす発進クラッチ2a(前進1速選択用、または後進段選択用のクラッチ)を具え、この発進クラッチ2aをスリップ制御することでトルクコンバータの機能を持たせたものとする。
【0015】
この自動変速機2は、エンジン1からの回転を選択変速段に応じ変速して出力し、自動変速機2からの出力回転がディファレンシャルギヤ装置4を経て左右駆動車輪3L,3Rに達することで車両を走行させることができる。
停車に際しては、自動ブレーキ手段の用をもなすブレーキアクチュエータ(ブレーキユニット)5L,5Rを作動させて車輪3L,3Rを制動することにより車両を停車させることができる。
【0016】
エンジン1および発進クラッチ2aはエンジンコントローラ10により制御し、ブレーキアクチュエータ5L,5Rによる車輪3L,3Rの制動力制御は、ブレーキコントローラ20により遂行する。
【0017】
このため、エンジンコントローラ10には、アクセルペダル踏み込み量(アクセル開度)APOを検出するアクセル開度センサ31からの信号と、
車両の対地速度である車速VSPを検出する車速センサ32からの信号と、
制動操作があるときにONとなるブレーキスイッチ33からの信号と、
路面勾配θを検出する勾配センサ34(勾配検出手段)からの信号(ブレーキコントローラ20を経由する)とを入力する。
【0018】
またブレーキコントローラ20には、制動操作力対応のブレーキ液圧Pmを検出するブレーキ液圧センサ35からの信号と、
上記した路面勾配θ(正値が登坂路勾配、負値が降坂路勾配)を検出する勾配センサ34からの信号とを入力するほか、
エンジンコントローラ10からの後述するヒルホールドブレーキ力(停車用自動ブレーキ力)hTbおよびヒルホールドフラグFLAGを入力する。
【0019】
エンジンコントローラ10およびブレーキコントローラ20は、停車時後退防止制御部を図2の機能別ブロック線図により示すごとくに構成され、図3に示す制御プログラムを一定周期で繰り返し実行して、本発明が狙いとする停車時後退防止制御を以下のごとくに遂行するものとする。
【0020】
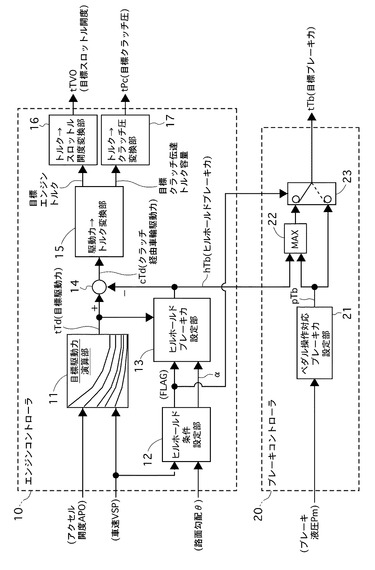
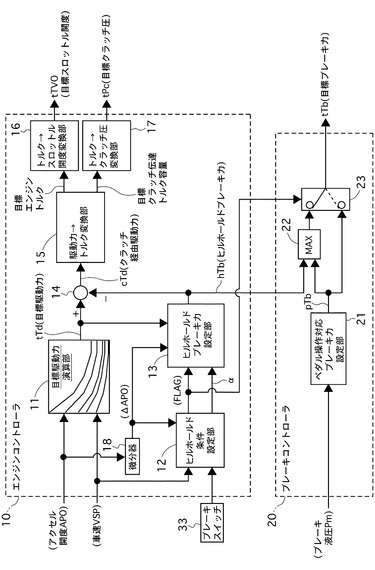
エンジンコントローラ10の停車時後退防止制御部は図2に示すごとく、目標駆動力演算部11と、ヒルホールド条件設定部12と、ヒルホールドブレーキ力設定部13と、減算器14と、駆動力→トルク変換部15と、トルク→スロットル開度変換部16と、トルク→クラッチ圧変換部17とを具える。
【0021】
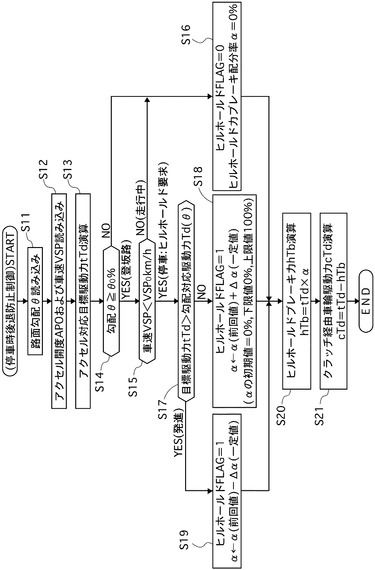
かかるエンジンコントローラ10は、図3のステップS11において路面勾配θを読み込むと共に、ステップS12においてアクセル開度APOおよび車速VSPを読み込む。
エンジンコントローラ10内の目標駆動力演算部11は、図3のステップS13において、上記のアクセル開度APOおよび車速VSPにより表される現在の運転状態から運転者が要求しているアクセル対応目標車輪駆動力tTdを演算する。
この演算に当たっては、アクセル開度APOごとに車速VSPおよび目標駆動力tTdの関係を表した二次元マップを予め用意しておき、これをもとにアクセル開度APOおよび車速VSPからアクセル対応目標車輪駆動力tTdを検索して求める。
【0022】
エンジンコントローラ10内のヒルホールド条件設定部12は、図3のステップS14において路面勾配θが登坂路判定値θo以上か否かにより、車両が登坂路にいるか否かをチェックすると共に、ステップS15において車速VSPが停車判定値VSPo未満の停車状態か否かをチェックする。
ヒルホールド条件設定部12は、ステップS14で路面勾配θが登坂路判定値θo未満(登坂路でない)と判定したり、ステップS14でθ≧θo(登坂路)と判定しても、ステップS15でVSP≧VSPo(走行中)と判定するときは、登坂路停車時の後退防止制御(ヒルホールド制御)が不要であるから、ステップS16において、ヒルホールドフラグFLAGを0となし、ヒルホールド力ブレーキ配分率α(ヒルホールド力をブレーキ力により担う分担割合)も0%となす。
【0023】
ヒルホールド条件設定部12は、ステップS14で路面勾配θが登坂路判定値θo以上(登坂路)と判定し、且つ、ステップS15でVSP<VSPo(停車中)と判定するとき、つまり、登坂路停車時の後退防止制御(ヒルホールド制御)が必要であると判定するとき、
ステップS17において、ステップS13で求めたアクセル対応目標車輪駆動力tTdが、路面勾配θのもとで停車状態を維持するのに必要な勾配対応駆動力Td(θ)を越えているか否かにより、運転者が発進を要求したアクセル操作を行ったか否かをチェックする。
【0024】
ヒルホールド条件設定部12は、ステップS17でtTd≦Td(θ)と判定する間、つまり運転者が発進を要求したアクセル操作を行っていないと判定する間、
ステップS18において、ヒルホールドフラグFLAGを1となし、ヒルホールド力ブレーキ配分率αを、α=α(前回値)+Δα(一定値)により演算する。
かかる演算により求めたヒルホールド力ブレーキ配分率αは、Δα(一定値)により決まる一定の時間変化割合で増大するが、初期値を0%、下限値を0%、上限値を100%とする。
【0025】
ヒルホールド条件設定部12は、ステップS17でtTd>Td(θ)と判定する間、つまり運転者が発進を要求したアクセル操作を行ったと判定する間、
ステップS19において、ヒルホールドフラグFLAGを1となし、ヒルホールド力ブレーキ配分率αを、α=α(前回値)−Δα(一定値)により演算する。
かかる演算により求めたヒルホールド力ブレーキ配分率αは、Δα(一定値)により決まる一定の時間変化割合で低下する。
【0026】
エンジンコントローラ10内のヒルホールドブレーキ力設定部13は、図3のステップS20において、ヒルホールド条件設定部12がステップS16またはステップS18或いはステップS19で上記のごとくに決定したヒルホールド力ブレーキ配分率α、および、目標駆動力演算部11(ステップS13)で求めたアクセル対応目標車輪駆動力tTdを用い、
登坂路停車時後退防止用のブレーキ力であるヒルホールドブレーキ力hTbをhTb=tTd×αの演算により求める。
従ってヒルホールドブレーキ力設定部13およびステップS20は、本発明における停車用自動ブレーキ力決定手段に相当する。
【0027】
エンジンコントローラ10内の減算器14は、図3のステップS21において、アクセル対応目標車輪駆動力tTdからヒルホールドブレーキ力hTbを差し引いて得られる両者の差値をクラッチ経由車輪駆動力cTd(停車時エンジン出力および停車時クラッチ伝達トルク容量)とすべく、このクラッチ経由車輪駆動力cTdをcTd=tTd−hTbの演算により求める。
従って減算器14およびステップS21は、本発明における停車時車輪駆動力決定手段に相当する。
【0028】
エンジンコントローラ10内の駆動力→トルク変換部15は、上記のクラッチ経由車輪駆動力cTdをトルク値に変換して、このトルク値を目標エンジントルクと定めるほか、このトルク値を発進クラッチ2a(図1参照)の目標クラッチ伝達トルク容量と定める。
エンジンコントローラ10内のトルク→スロットル開度変換部16は、図1のエンジン1が上記の目標エンジントルクを出力するのに必要な目標スロットル開度tTVOを求め、
エンジンコントローラ10内のトルク→クラッチ圧変換部17は、図1に示す発進クラッチ2aの伝達トルク容量が上記の目標クラッチ伝達トルク容量となるのに必要な発進クラッチ2aの目標クラッチ圧tPcを求める。
【0029】
トルク→スロットル開度変換部16からの目標スロットル開度tTVO、および、トルク→クラッチ圧変換部17からの目標クラッチ圧tPcは、図1に示すようにエンジン1のスロットル開度制御および発進クラッチ2aの締結力制御に供され、
エンジン1は、その出力トルクが上記の目標エンジントルクとなるようスロットル開度を制御され、発進クラッチ2aは、その伝達トルク容量が上記の目標クラッチ伝達トルク容量となるよう締結力を制御される。
【0030】
ブレーキコントローラ20の停車時後退防止制御部は図2に示すように、ペダル操作対応ブレーキ力設定部27と、セレクトハイ(MAX)部22と、セレクタ23とで構成する。
ペダル操作対応ブレーキ力設定部27は、ブレーキペダルの踏み込みにより発生するブレーキ液圧(マスターシリンダ液圧)Pmの検出値をもとに、ブレーキペダルの踏み込み操作に対応したペダル操作対応ブレーキ力pTbを設定する。
【0031】
セレクトハイ(MAX)部22は、かかるペダル操作対応ブレーキ力pTbと、前記した登坂路停車時後退防止用のヒルホールドブレーキ力hTbとの大きい方MAX(pTb,hTb)を選択し、
セレクタ23は、ヒルホールドフラグFLAGに応じ、FLAG=1のとき当該選択されたセレクトハイブレーキ力MAX(pTb,hTb)を目標ブレーキ力tTbとし、FLAG=0のときペダル操作対応ブレーキ力pTbを目標ブレーキ力tTbとするものである。
かように決定した目標ブレーキ力tTbは、図1に示すようにブレーキアクチュエータ5L,5Rに指令され、これらブレーキアクチュエータ5L,5Rは車輪3L,3Rのブレーキ力を、目標ブレーキ力tTbが達成されるよう制御する。
【0032】
上記実施例の作用を図4にもとづき以下に説明する。
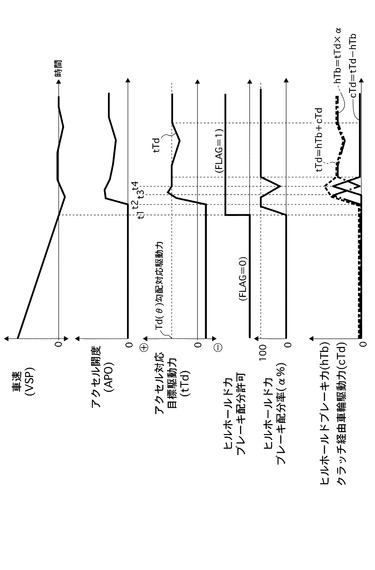
図4は、登坂路走行中にアクセルペダルを釈放してブレーキペダル操作なしに車両を、車速VSPが図示のごとく低下するよう減速させ、瞬時t1に停車により車速VSPが停車判定車速VSPo未満になり、その後の瞬時t2より、運転者が図示のアクセル開度APO(アクセル操作)によって停車状態を維持しようとした場合のヒルホールド(登坂路停車時後退防止)制御を示す動作タイムチャートである。
【0033】
車速VSPが停車判定車速VSPo未満になった瞬時t1より、車速VSPが停車判定車速VSPoを越えてヒルホールドフラグFLAG=0になるまでの間(ステップS15、ステップS16)、ヒルホールドフラグFLAG=1(ステップS18、ステップS19)により、登坂路停車状態を保つためのヒルホールド力を自動ブレーキに分担させることを許可するヒルホールド力ブレーキ配分許可信号を図4の瞬時t1以後に示すように出力し続ける。
【0034】
かかるヒルホールド力ブレーキ配分許可信号(ヒルホールドフラグFLAG=1)が出力されている間、図4の瞬時t2以後における停車維持用(後退防止用)アクセル開度APO(アクセル操作)に対応して図示のごとくに変化するアクセル対応目標駆動力tTdが勾配対応駆動力Td(θ)以下であれば(ステップS17)、ヒルホールド力ブレーキ配分率αをステップS18につき前述したごとく、100%を上限値としてΔα(一定値)により決まる一定の時間変化割合で増大させる。
【0035】
一方で図4の瞬時t3〜t4間におけるごとくアクセル対応目標駆動力tTdが勾配対応駆動力Td(θ)以上であれば(ステップS17)、ヒルホールド力ブレーキ配分率αをステップS19につき前述したごとく、0%を下限値としてΔα(一定値)により決まる一定の時間変化割合で低下させる。
従ってヒルホールド力ブレーキ配分率αは、図4に示すように時系列変化する。
【0036】
かかるヒルホールド力ブレーキ配分率αを、アクセル対応目標駆動力tTdに乗じて得られるヒルホールドブレーキ力hTb(ステップS20)は、図4に示すごときものとなり、
また、アクセル対応目標駆動力tTdからヒルホールドブレーキ力hTbを差し引いて得られるクラッチ経由車輪駆動力cTd(ステップS21)は、図4に示すごときものとなる。
【0037】
図4に示すヒルホールドブレーキ力hTbは、図2のセレクトハイ(MAX)部22に供給され、ペダル操作対応ブレーキ力pTbと対比されるが、ブレーキペダルが踏み込まれていないためブレーキ液圧Pmが零であるから、セレクトハイ(MAX)部22はヒルホールドブレーキ力hTbを選択する。
そしてセレクタ23は、上記したヒルホールドフラグFLAG=1に呼応して、セレクトハイ(MAX)部22が選択したヒルホールドブレーキ力hTbを目標ブレーキ力tTbとし、これを、図1に示すようにブレーキアクチュエータ5L,5Rに指令する。
【0038】
図4に示すクラッチ経由車輪駆動力cTdは、図2に示す駆動力→トルク変換部15においてトルク値に変換されると共に、このトルク値を目標エンジントルクおよびを発進クラッチ2a(図1参照)の目標クラッチ伝達トルク容量と定め、
これら目標エンジントルクおよびを目標クラッチ伝達トルク容量が実現されるよう、図1のエンジン1のスロットル開度制御および発進クラッチ2aの締結力制御を遂行する。
【0039】
かかる本実施例のヒルホールド制御(登坂路停車時後退防止制御)によれば、
登坂路停車中のアクセル操作に応じたヒルホールドブレーキ力hTb(停車用自動ブレーキ力)により停車状態を達成して登坂路後退防止を実現し得るため、
アクセル操作により停車状態(後退防止)を実現するといえども、車輪駆動系における発進クラッチ2aのスリップ制御は、アクセル操作対応目標駆動力tTdの過剰分を逃がす程度のごく僅かなスリップを生じさせるだけでよく、発進クラッチ2aのスリップに伴う燃費の悪化や、耐久性(発熱および摩耗)の低下に関する問題をほとんど生ずることがない。
【0040】
また、上記の後退防止制御が停車中のアクセル操作に呼応して行われることから、
何らかの後退防止操作が必要な登坂路停車中で、何ら後退防止用の操作を行っていないのに車両が後退を防止される違和感を運転者に与えることもない。
【0041】
上記実施例の発進時における作用を図5にもとづき以下に説明する。
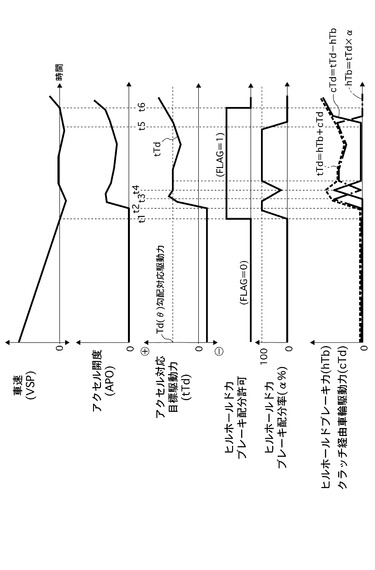
図5は、登坂路走行中にアクセルペダルを釈放してブレーキペダル操作なしに車両を、車速VSPが図示のごとく低下するよう減速させ、瞬時t1に停車により車速VSPが停車判定車速VSPo未満になり、その後の瞬時t2より、運転者が図示のアクセル開度APO(アクセル操作)によって停車状態を維持しようとした場合のヒルホールド(登坂路停車時後退防止)制御と、
瞬時t5より、運転者が図示のアクセル開度APOの増大(アクセルペダルの踏み込み操作)によって停車状態の車両を発進させようとした場合の発進(ヒルホールド終了)制御とを示す動作タイムチャートである。
【0042】
車速VSPが停車判定車速VSPo未満になった瞬時t1より、車速VSPが停車判定車速VSPoを越えてヒルホールドフラグFLAG=0になる瞬時t6までの間(ステップS15、ステップS16)、ヒルホールドフラグFLAG=1(ステップS18、ステップS19)により、登坂路停車状態を保つためのヒルホールド力を自動ブレーキに分担させることを許可するヒルホールド力ブレーキ配分許可信号を図5の瞬時t1〜t6間に示すように出力する。
【0043】
かかるヒルホールド力ブレーキ配分許可信号(ヒルホールドフラグFLAG=1)が出力されている間、図5の瞬時t2〜t5間における停車維持用(後退防止用)アクセル開度APO(アクセル操作)に対応して図示のごとくに変化するアクセル対応目標駆動力tTdが勾配対応駆動力Td(θ)以下であれば(ステップS17)、ヒルホールド力ブレーキ配分率αをステップS18につき前述したごとく、100%を上限値としてΔα(一定値)により決まる一定の時間変化割合で増大させる。
【0044】
一方で図5の瞬時t3〜t4間におけるごとくアクセル対応目標駆動力tTdが勾配対応駆動力Td(θ)以上であれば(ステップS17)、ヒルホールド力ブレーキ配分率αをステップS19につき前述したごとく、0%を下限値としてΔα(一定値)により決まる一定の時間変化割合で低下させる。
従ってヒルホールド力ブレーキ配分率αは、図5の瞬時t1〜t5の間、図示のように時系列変化する。
【0045】
かかるヒルホールド力ブレーキ配分率αを、アクセル対応目標駆動力tTdに乗じて得られるヒルホールドブレーキ力hTb(ステップS20)は、図5の瞬時t1〜t5の間に示すごときものとなり、
また、アクセル対応目標駆動力tTdからヒルホールドブレーキ力hTbを差し引いて得られるクラッチ経由車輪駆動力cTd(ステップS21)は、図5の瞬時t1〜t5の間に示すごときものとなり、
図4につき前述したと同様なヒルホールド制御、および、同様な作用効果を達成することができる。
【0046】
ところで図5の瞬時t5より、運転者が図示のアクセル開度APOの増大(アクセルペダルの踏み込み操作)によって停車状態の車両を発進させようとした場合、
これに伴いアクセル対応目標駆動力tTdが図5の瞬時t5以降、図示のごとくに増大して勾配対応駆動力Td(θ)以上になることから(ステップS17)、ヒルホールド力ブレーキ配分率αがステップS19につき前述したごとく、Δα(一定値)により決まる一定の時間変化割合で低下され、ついには下限値の0%になる。
【0047】
かかるヒルホールド力ブレーキ配分率αを、アクセル対応目標駆動力tTdに乗じて得られるヒルホールドブレーキ力hTb(ステップS20)は、図5の瞬時t5以後に示すごとくに低下され、
アクセル対応目標駆動力tTdからヒルホールドブレーキ力hTbを差し引いて得られるクラッチ経由車輪駆動力cTd(ステップS21)は逆に、図5の瞬時t5以後に示すごとくに増大される。
かかるヒルホールドブレーキ力hTbの低下、および、クラッチ経由車輪駆動力cTdの増大により車両を、図5の瞬時t6以後における車速VSPの上昇変化から明らかなように発進させて、ヒルホールド制御を終了させることができる。
【0048】
なお、ヒルホールド力ブレーキ配分率αの増大、低下に係わる時間変化割合を決定するΔα(一定値)は、ヒルホールド力ブレーキ配分率αの時間変化割合が、ヒルホールドブレーキ力hTbおよびクラッチ経由車輪駆動力cTdの急変に伴うショックを生じない範囲でできるだけ大きなものとなるよう定め、これにより、ヒルホールド制御開始応答およびヒルホールド制御終了応答を高めるのがよい。
なお実施例では、ヒルホールド力ブレーキ配分率増大用と、低下用とで同じΔα(一定値)を用いたが、異ならせてもよいのは言うまでもない。
【0049】
図6〜8は本発明の他の実施例を示す。
本実施例においてはエンジンコントローラ10およびブレーキコントローラ20の停車時後退防止制御部を図6の機能別ブロック線図により示すごとくに構成し、図7に示す制御プログラムを一定周期で繰り返し実行して、本発明が狙いとする停車時後退防止制御を以下のごとくに遂行するものとする。
【0050】
ブレーキコントローラ20の停車時後退防止制御部は図6に示すように、図2に示す前記実施例におけると同様な、ペダル操作対応ブレーキ力設定部27と、セレクトハイ(MAX)部22と、セレクタ23とで構成するため、ここでの重複説明を省略する。
【0051】
エンジンコントローラ10の停車時後退防止制御部は図6に示すように、図2に示す前記実施例と同様な、目標駆動力演算部11、ヒルホールド条件設定部12、ヒルホールドブレーキ力設定部13、減算器14、駆動力→トルク変換部15、トルク→スロットル開度変換部16、およびトルク→クラッチ圧変換部17を具えるほかに、微分器18を設け、
ヒルホールド条件設定部12への入力信号として、図2における路面勾配θの代わりに図1につき前述したブレーキスイッチ33からの信号を入力する。
【0052】
微分器18はアクセル開度APOの検出値を入力され、一定の演算周期ごとに、アクセル開度APOの前回読み込み値と、今回読み込み値との間における差から、アクセル開度APOの時間変化率ΔAPO(=今回値−前回値)を演算し、
このアクセル開度時間変化率ΔAPOをヒルホールド条件設定部12およびヒルホールドブレーキ力設定部13に入力する。
従って微分器18は、本発明におけるアクセル操作速度検出手段に相当する。
【0053】
ヒルホールド条件設定部12は、ブレーキスイッチ33からの信号と、検出車速VSPを入力され、ブレーキスイッチ33がOFFで(運転者が制動操作を行っていなくて)、且つ、車速VSPが停車判定車速VSPo未満であるか否かを、つまり、ブレーキ操作なしに停車状態を保っているか否かを判定し、
そうでなければ、つまり、ブレーキ操作により停車状態を保っていたり、停車状態ではなくて走行状態であれば、アクセル操作による停車状態でないことからヒルホールドフラグFLAGを0にリセットすると共に、ヒルホールド力ブレーキ配分率αを0%にする。
【0054】
ヒルホールド条件設定部12は、ブレーキスイッチ33がOFFで(運転者が制動操作を行っていなくて)、且つ、車速VSPが停車判定車速VSPo未満であると判定するとき、つまり、ブレーキ操作なしに停車状態を保っていると判定する場合、
アクセル操作により停車状態を維持することになるため、ヒルホールドフラグFLAGを1にセットすると共に、ヒルホールド力ブレーキ配分率αを、
α=α(前回値)−K・ΔAPO+C
ただし、K:係数
C:一定値
の演算により求める。
【0055】
かかる演算により求めたヒルホールド力ブレーキ配分率αは、アクセル開度APOの時間変化率ΔAPO(正値が増加率、負値が低下率)に応じた(−K・ΔAPO+C)により決まる時間変化割合で変化する(ΔAPO>C/Kのアクセル開度増加中αは0%に向け低下、ΔAPO<C/Kのアクセル開度低下中αは100%に向け増大、ΔAPO=0のアクセル開度保持中αはCにより決まる一定速度で100%に向け増大する)。
【0056】
ヒルホールドブレーキ力設定部13は、ヒルホールド条件設定部12が上記のごとくに決定したヒルホールド力ブレーキ配分率α、および、目標駆動力演算部11からのアクセル対応目標車輪駆動力tTdを用い、
登坂路停車時後退防止用のブレーキ力であるヒルホールドブレーキ力hTbをhTb=tTd×αの演算により求める。
【0057】
図2につき前述したと同様に、減算器14は、アクセル対応目標車輪駆動力tTdから上記のヒルホールドブレーキ力hTbを差し引いて得られる両者の差値をクラッチ経由車輪駆動力cTd(停車時エンジン出力および停車時クラッチ伝達トルク容量)とすべく、このクラッチ経由車輪駆動力cTdをcTd=tTd−hTbの演算により求め、
駆動力→トルク変換部15は、上記のクラッチ経由車輪駆動力cTdをトルク値に変換して、このトルク値を目標エンジントルクと定めるほか、このトルク値を発進クラッチ2a(図1参照)の目標クラッチ伝達トルク容量と定める。
【0058】
上記の本実施例になる図6に示したエンジンコントローラ10の停車時後退防止部をマイクロコンピュータで構成する場合、
当該エンジンコントローラ10の停車時後退防止部は、図7に示す制御プログラムを一定周期で繰り返し実行して本発明が狙いとするヒルホールド制御を遂行する。
【0059】
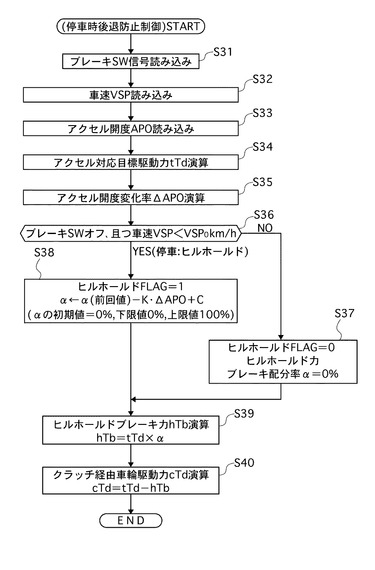
ステップS31においては、ブレーキスイッチ33からの信号を読み込み、ステップS32においては、センサ32(図1参照)で検出した車速VSPを読み込み、ステップS33においては、センサ31で検出したアクセル開度APOを読み込む。
次のステップS34においては、ステップS32で読み込んだ車速VSPおよびステップS33で読み込んだアクセル開度APOにより表される現在の運転状態から運転者が要求しているアクセル対応目標車輪駆動力tTdを演算する。
この演算に当たっては、アクセル開度APOごとに車速VSPおよび目標駆動力tTdの関係を表した二次元マップを予め用意しておき、これをもとにアクセル開度APOおよび車速VSPからアクセル対応目標車輪駆動力tTdを検索して求める。
【0060】
次のステップS35においては、一定の演算周期ごとにステップS33で読み込むアクセル開度APOの前回読み込み値と、今回読み込み値との間における差から、アクセル開度APOの時間変化率ΔAPO(=今回値−前回値)を演算する。
次いでステップS36において、ステップS31で読み込んだブレーキスイッチ信号と、ステップS32で読み込んだ車速VSPをもとに、ブレーキスイッチ33がOFFで(運転者が制動操作を行っていなくて)、且つ、車速VSPが停車判定車速VSPo未満であるか否かを、つまり、ブレーキ操作なしに停車状態を保つヒルホールド状態か否かを判定する。
【0061】
ステップS36でブレーキ操作なしに停車状態を保つヒルホールドでないと判定する場合、つまり、ブレーキ操作により停車状態を保っていたり、停車状態ではなくて走行状態である場合は、
アクセル操作による停車状態でないことからステップS37において、ヒルホールドフラグFLAGを0にリセットすると共に、ヒルホールド力ブレーキ配分率αを0%にする。
【0062】
ステップS36において、ブレーキスイッチ33がOFFで(運転者が制動操作を行っていなくて)、且つ、車速VSPが停車判定車速VSPo未満であると判定するとき、つまり、ブレーキ操作なしに停車状態を保っていると判定する場合、
アクセル操作により停車状態を維持することになるため、ステップS38において、ヒルホールドフラグFLAGを1にセットすると共に、ヒルホールド力ブレーキ配分率αを、前記した演算式
α=α(前回値)−K・ΔAPO+C
ただし、K:係数
C:一定値
の演算により算出する。
【0063】
かかる演算により求めたヒルホールド力ブレーキ配分率αは前述したとおり、アクセル開度APOの時間変化率ΔAPO(正値が増加率、負値が低下率)に応じた(−K・ΔAPO+C)により決まる時間変化割合で変化する(ΔAPO>C/Kのアクセル開度増加中αは低下、ΔAPO=0を含むΔAPO<C/Kのアクセル操作中αは増大)。
【0064】
次のステップS39においては、ステップS37またはステップS38で上記のごとくに決定したヒルホールド力ブレーキ配分率α、および、ステップS34で前記のごとくに求めたアクセル対応目標車輪駆動力tTdを用い、
登坂路停車時後退防止用のブレーキ力であるヒルホールドブレーキ力hTbをhTb=tTd×αの演算により求める。
従ってステップS39は、本発明における停車用自動ブレーキ力決定手段に相当する。
【0065】
その後ステップS40において、アクセル対応目標車輪駆動力tTdから上記のヒルホールドブレーキ力hTbを差し引いて得られる両者の差値をクラッチ経由車輪駆動力cTd(停車時エンジン出力および停車時クラッチ伝達トルク容量)とすべく、このクラッチ経由車輪駆動力cTdをcTd=tTd−hTbの演算により求める。
従ってステップS40は、本発明における停車時車輪駆動力決定手段に相当する。
このクラッチ経由車輪駆動力cTdは、図6の駆動力→トルク変換部15につき前述したようにトルク値に変換し、このトルク値を目標エンジントルクと定めるほか、このトルク値を発進クラッチ2a(図1参照)の目標クラッチ伝達トルク容量と定める。
【0066】
上記実施例の作用を図8にもとづき以下に説明する。
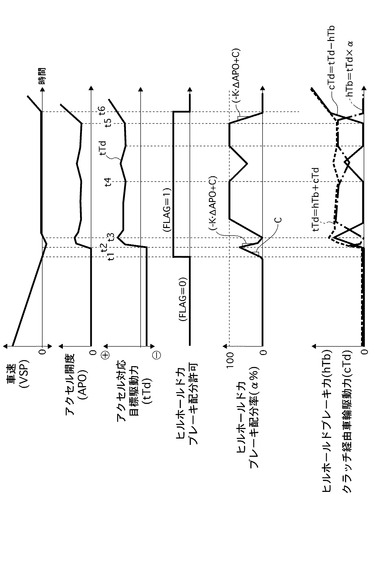
図8は、登坂路走行中にアクセルペダルを釈放してブレーキペダル操作なしに車両を、車速VSPが図示のごとく低下するよう減速させ、瞬時t1に停車により車速VSPが停車判定車速VSPo未満になり、その後の瞬時t2より、運転者が図示のアクセル開度APO(アクセル操作)によって停車状態を維持しようとした場合のヒルホールド(登坂路停車時後退防止)制御を示す動作タイムチャートである。
【0067】
車速VSPが停車判定車速VSPo未満になった瞬時t1より、後述の発進により車速VSPが停車判定車速VSPoを越えてヒルホールドフラグFLAG=0になる(ステップS36、ステップS37)瞬時t6までの間、ヒルホールドフラグFLAG=1(ステップS36、ステップS38)により、登坂路停車状態を保つためのヒルホールド力を自動ブレーキに分担させることを許可するヒルホールド力ブレーキ配分許可信号を図示のごとくに出力し続ける。
【0068】
かかるヒルホールド力ブレーキ配分許可信号(ヒルホールドフラグFLAG=1)が出力されている間、図8の瞬時t2以後における停車維持用(後退防止用)アクセル開度APO(アクセル操作)に対応して、アクセル対応目標駆動力tTdも図示のごとくに増大する。
かかる停車維持用(後退防止用)アクセル操作(アクセル開度APOの増大)が行われる前の瞬時t1〜t2においては、アクセル開度APOの時間変化率ΔAPOがΔAPO=0で、アクセル開度保持中のため、ヒルホールド力ブレーキ配分率αは前記した一定値Cにより決まる一定速度で0%から100%に向け増大する。
【0069】
しかして瞬時t2以後は、停車維持用(後退防止用)アクセル操作(アクセル開度APOの増大)によりその時間変化率ΔAPOがΔAPO>C/Kになったことで、ヒルホールド力ブレーキ配分率αは前記した(−K・ΔAPO+C)により決まる、ΔAPOに応じた時間変化割合で0%に向け低下する。
【0070】
その後、瞬時t3にアクセル開度APOの増大を止めて、それ以降アクセル開度APOを、停車維持用(後退防止用)の値近辺に保つアクセル操作を行ったことから、そしてアクセル開度APOの増大を止めた瞬時t3に車速VSPが停車判定車速VSPoを越えなかったことから、
ヒルホールド力ブレーキ配分率αは、アクセル開度APOの時間変化率ΔAPOがΔAPO<C/KまたはΔAPO=0であることに呼応して、前記した(−K・ΔAPO+C)により決まる、ΔAPOに応じた時間変化割合、若しくは一定値Cにより決まる一定速度で100%に向け増大する。
【0071】
瞬時t1〜t5間においては、ヒルホールド力ブレーキ配分率αが以上のように変化することにより、ヒルホールドブレーキ力hTb(=tTd×α)、および、クラッチ経由車輪駆動力cTd(=tTd−hTb)はそれぞれ、図8の最下段に示すように時系列変化する。
【0072】
図8に示すヒルホールドブレーキ力hTbは、図6のセレクトハイ(MAX)部22に供給され、ペダル操作対応ブレーキ力pTbと対比されるが、ブレーキペダルが踏み込まれていないためブレーキ液圧Pmが零であるから、セレクトハイ(MAX)部22はヒルホールドブレーキ力hTbを選択する。
そしてセレクタ23は、上記したヒルホールドフラグFLAG=1に呼応して、セレクトハイ(MAX)部22が選択したヒルホールドブレーキ力hTbを目標ブレーキ力tTbとし、これを、図1に示すようにブレーキアクチュエータ5L,5Rに指令する。
【0073】
図8に示すクラッチ経由車輪駆動力cTdは、図6に示す駆動力→トルク変換部15においてトルク値に変換されると共に、このトルク値を目標エンジントルクおよびを発進クラッチ2a(図1参照)の目標クラッチ伝達トルク容量と定め、
これら目標エンジントルクおよびを目標クラッチ伝達トルク容量が実現されるよう、図1のエンジン1のスロットル開度制御および発進クラッチ2aの締結力制御を遂行する。
【0074】
かかる本実施例のヒルホールド制御(登坂路停車時後退防止制御)によれば、
登坂路停車中のアクセル操作に応じたヒルホールドブレーキ力hTb(停車用自動ブレーキ力)により停車状態を達成して登坂路後退防止を実現するため、
アクセル操作により停車状態(後退防止)を実現するといえども、車輪駆動系における発進クラッチ2aのスリップ制御は、アクセル操作対応目標駆動力tTdの過剰分を逃がす程度のごく僅かなスリップを生じさせるだけでよく、発進クラッチ2aのスリップに伴う燃費の悪化や、耐久性(発熱および摩耗)の低下に関する問題をほとんど生ずることがない。
【0075】
また、上記の後退防止制御が停車中のアクセル操作に呼応して行われることから、
何らかの後退防止操作が必要な登坂路停車中で、何ら後退防止用の操作を行っていないのに車両が後退を防止される違和感を運転者に与えることもない。
【0076】
これらの作用効果は、前記した第1実施例によると同じものであるが、第1実施例においてはかかる作用効果を達成するのに、路面勾配θを検出する勾配センサ34が不可欠であった。
しかし本実施例においては、既存のアクセル開度センサ31からの信号を微分して得られるアクセル開度時間変化割合ΔAPOを用いて同様な作用効果を達成し得ることから、コスト的に大いに有利である。
【0077】
次いで、上記停車時後退防止制御の後、図8の瞬時t5に運転者が図示のアクセル開度APOの増大(アクセルペダルの踏み込み操作)によって停車状態の車両を発進させようとした場合の発進(ヒルホールド終了)制御を説明する。
図8の瞬時t5より、運転者が発進を希望してアクセル開度APOを図示のごとく増大させた(アクセルペダルの踏み込み操作を行った)場合、これに伴いアクセル対応目標駆動力tTdが図8の瞬時t5以降、図示のごとくに増大する。
【0078】
一方、発進用の上記アクセルペダルの踏み込みによりアクセル開度APOの増大速度ΔAPOがΔAPO>C/Kになったことで、ヒルホールド力ブレーキ配分率αは前記した(−K・ΔAPO+C)により決まる、ΔAPOに応じた時間変化割合で低下され、ついには下限値の0%になる(ステップS38)。
【0079】
かように低下するヒルホールド力ブレーキ配分率αを、アクセル対応目標駆動力tTdに乗じて得られるヒルホールドブレーキ力hTb(ステップS39)は、図8の瞬時t5以後に示すごとくに低下され、
アクセル対応目標駆動力tTdからヒルホールドブレーキ力hTbを差し引いて得られるクラッチ経由車輪駆動力cTd(ステップS40)は逆に、図8の瞬時t5以後に示すごとくに増大される。
かかるヒルホールドブレーキ力hTbの低下、および、クラッチ経由車輪駆動力cTdの増大により車両を、図8の瞬時t6以後における車速VSPの上昇変化から明らかなように発進させて、ヒルホールド制御を終了させることができる。
【0080】
なお、ヒルホールド力ブレーキ配分率αの増大、低下に係わる時間変化割合を決定する係数Kおよび一定値Cは、ヒルホールド力ブレーキ配分率αの時間変化割合が、ヒルホールドブレーキ力hTbおよびクラッチ経由車輪駆動力cTdの急変に伴うショックを生じない範囲でできるだけ大きなものとなるよう定め、これにより、ヒルホールド制御開始応答およびヒルホールド制御終了応答を高めるのがよい。
ところで本実施例においては、発進時におけるヒルホールド力ブレーキ配分率αの低下を前記した(−K・ΔAPO+C)により決まる、アクセル開度増大速度ΔAPOに応じた時間変化割合で行わせることから、
運転者がアクセル開度増大速度ΔAPOを速くした急発進時ほどヒルホールド力ブレーキ配分率αの低下(ヒルホールドブレーキ力hTbの低下、および、クラッチ経由車輪駆動力cTdの増大)を速やかに完遂させて、急発進の要求を満足させることができる。
【0081】
なお上記実施例ではいずれの場合も、図1に示すごとく動力源としてエンジン1のみを搭載し、エンジン回転を自動変速機2による変速下で車輪3L,3Rに向かわせるようなパワートレーンとし、自動変速機2の伝動系における発進クラッチ2aをトルクコンバータと同様に機能するようスリップ制御するようにした車両に対し、本発明の停車時後退防止装置を適用する場合について説明を展開したが、
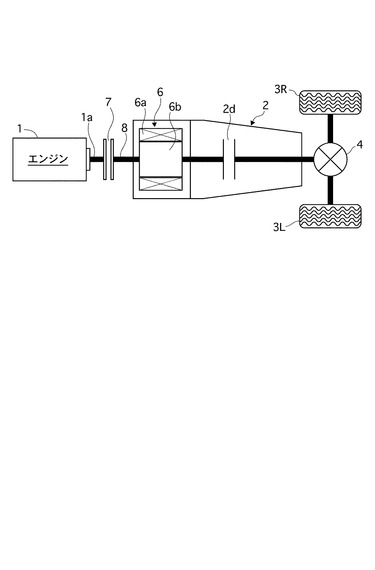
本発明の停車時後退防止装置は、図9に例示するようなハイブリッド車両など、その他いかなる車両に対しても同様に適用することができるのは言うまでもない。
【0082】
図9のハイブリッド車両は、通常の後輪駆動車と同様にエンジン1の車両前後方向後方に自動変速機2をタンデムに配置し、エンジン1(詳しくはクランクシャフト1a)からの回転を自動変速機2の入力軸へ伝達する軸8に結合してモータ/ジェネレータ6を設ける。
【0083】
モータ/ジェネレータ6は、自動変速機2のコンバータハウジング内にトルクコンバータに代えて収納し、このコンバータハウジング内に固設した環状のステータ6aと、このステータ3a内に所定のエアギャップを持たせて同心に配置したロータ6bとよりなり、運転状態の要求に応じ、モータ(電動機)として作用したり、ジェネレータ(発電機)として作用するもので、エンジンクランクシャフト1aおよび自動変速機2の入力軸との間に介在させる。
モータ/ジェネレータ6は、ロータ6bの中心に上記の軸8を貫通して結着し、この軸8をモータ/ジェネレータ軸として利用する。
【0084】
かかるモータ/ジェネレータ6およびエンジン1間、詳しくは、モータ/ジェネレータ軸8とエンジンクランクシャフト1aとの間に第1クラッチ7を介挿し、この第1クラッチ7によりエンジン1およびモータ/ジェネレータ3間を切り離し可能に結合する。
ここで第1クラッチ7は、伝達トルク容量を連続的に変更可能なものとし、例えば、比例ソレノイドでクラッチ作動油流量およびクラッチ作動油圧を連続的に制御して伝達トルク容量を変更可能な湿式多板クラッチで構成する。
【0085】
モータ/ジェネレータ6および自動変速機2間は、モータ/ジェネレータ軸8と自動変速機2の入力軸との直接結合により相互に直結させる。
自動変速機2は、その変速機構部分が周知の遊星歯車式自動変速機と同様なものであるが、前進1速段選択時に係合しているクラッチ要素や、後進段選択時に係合しているクラッチ要素を、発進クラッチ2dとして用いてスリップ制御することでトルクコンバータの機能を持たせるものとする。
【0086】
以下、図9に示す上記したパワートレーンと具えるハイブリッド車両の選択モードごとの機能を説明する。
図9のパワートレーンにおいては、低負荷・低車速時に用いられる電気走行(EV)モードが要求される場合、第1クラッチ7を解放し、自動変速機2を所定変速段が選択された動力伝達状態にする。
【0087】
この状態でモータ/ジェネレータ6を駆動すると、当該モータ/ジェネレータ6からの出力回転のみが自動変速機2へ入力されることとなり、自動変速機2が当該入力回転を、選択中の変速段に応じ変速して出力する。
自動変速機2からの出力回転はその後、ディファレンシャルギヤ装置4を経て左右駆動輪3L,3Rに至り、車両をモータ/ジェネレータ6のみによるEVモードで電気走行(EV走行)させることができる。
【0088】
登坂路停車時の後退防止(ヒルホールド制御)や、高速走行時や、大負荷走行時や、バッテリの持ち出し可能電力が少ない時などで用いられるハイブリッド走行モード(HEVモード)が要求される場合、第1クラッチ7を締結すると共に、自動変速機2を所定変速段が選択された動力伝達状態にする。
この状態では、エンジン1からの出力回転、または、エンジン1からの出力回転およびモータ/ジェネレータ6からの出力回転の双方が自動変速機2へ入力されることとなり、自動変速機2が当該入力回転を、選択中の変速段に応じ変速して出力する。
自動変速機2からの出力回転はその後、ディファレンシャルギヤ装置4を経て左右駆動輪3L,3Rに至り、車両をエンジン1およびモータ/ジェネレータ6の双方によるHEVモードでハイブリッド走行させることができる。
【0089】
かかるHEV走行中において、エンジン1を最適燃費で運転させるとエネルギーが余剰となる場合、この余剰エネルギーによりモータ/ジェネレータ6を発電機として作動させることで余剰エネルギーを電力に変換し、この発電電力をモータ/ジェネレータ6のモータ駆動に用いるよう蓄電しておくことでエンジン1の燃費を向上させることができる。
【0090】
かかるハイブリッド車両に対し本発明による登坂路停車時の後退防止(ヒルホールド制御)を適用する場合、ハイブリッド車両を上記のHEVモードとなし、エンジン1からの出力回転のみが自動変速機2へ入力されるようにした状態で、本発明による登坂路停車時の後退防止(ヒルホールド制御)を以下のごとくに遂行する。
つまり、図9では図示を省略したが、図1におけると同様なブレーキアクチュエータ5L,5Rを作動させて、前記各実施例におけると同様なヒルホールドブレーキ力hTbを付与すると共に、前記各実施例におけると同様なクラッチ経由車輪駆動力cTdがエンジン1から発進クラッチ2aを経て車輪3L,3Rに向かうようエンジン1の出力(スロットル開度)制御および発進クラッチ2aの締結容量制御を行う。
【0091】
かかるハイブリッド車両に対し本発明による登坂路停車時の後退防止(ヒルホールド制御)を適用する場合も、前記した各実施例によると同様な作用効果を達成することができる。
【図面の簡単な説明】
【0092】
【図1】本発明の一実施例になる停車時後退防止装置を具えるフロントエンジン・リヤホイールドライブ車両のパワートレーンを、その制御系とともに示す略線図である。
【図2】図1におけるエンジンコントローラおよびブレーキコントローラの停車時後退防止部に係わる機能別ブロック線図である。
【図3】図1におけるエンジンコントローラが実行する停車時後退防止の制御プログラムを示すフローチャートである。
【図4】図1〜3に示す実施例による停車時後退防止制御の動作タイムチャートである。
【図5】図1〜3の実施例による停車時後退防止制御、および、その終了後における発進制御を示す動作タイムチャートである。
【図6】本発明の他の実施例を示す、図2と同様な停車時後退防止部の機能別ブロック線図である。
【図7】同実施例になる停車時後退防止の制御プログラムを示す、図3と同様なフローチャートである。
【図8】同実施例における停車時後退防止制御、および、その終了後における発進制御を示す、図5と同様な動作タイムチャートである。
【図9】本発明による停車時後退防止装置を適用可能なフロントエンジン・リヤホイールドライブ式ハイブリッド車両のパワートレーンを示す略線図である。
【符号の説明】
【0093】
1 エンジン(動力源)
2 自動変速機
2a 発進クラッチ(断接手段)
3L,3R 車輪
4 ディファレンシャルギヤ装置
5L,5R ブレーキアクチュエータ(ブレーキユニット:自動ブレーキ手段)
6 モータ/ジェネレータ(動力源)
7 第1クラッチ
8 モータ/ジェネレータ軸
10 エンジンコントローラ
11 目標駆動力演算部
12 ヒルホールド条件設定部
13 ヒルホールドブレーキ力設定部(停車用自動ブレーキ力決定手段)
14 減算器(停車時車輪駆動力決定手段)
15 駆動力→トルク変換部
16 トルク→スロットル開度変換部
17 トルク→クラッチ圧変換部
18 微分器(アクセル操作速度検出手段)
20 ブレーキコントローラ
21 ペダル操作対応ブレーキ力設定部
22 セレクトハイ部
23 セレクタ
31 アクセル開度センサ
32 車速センサ
33 ブレーキスイッチ
34 勾配センサ(勾配検出手段)
35 ブレーキ液圧センサ
【技術分野】
【0001】
本発明は、車両が登坂路停車時に後退するのを、運転者のアクセル操作によって防止するようにした型式の停車時後退防止装置に関するものである。
【背景技術】
【0002】
登坂路停車状態からの発進に際し、停車状態を保つためブレーキペダルを踏んでいた足をアクセルペダルに踏み替える時、車両は重力により自然後退する。
かかる登坂路での自然後退を防止する停車時後退防止技術としては従来、例えば特許文献1に記載のごときものが知られている。
【0003】
この停車時後退防止技術は所謂ヒルホールド技術と称せられるもので、
登坂路停車状態を、車輪駆動系におけるクラッチなど断接手段の解放と、ブレーキアクチュエータによる自動ブレーキ(ヒルホールドブレーキ)とで達成し、
上記の発進に際しては、断接手段の締結進行(伝達トルク容量の増大)と、ブレーキアクチュエータによる自動ブレーキ力(ヒルホールドブレーキ力)の低下とにより、動力源からの正トルクが車輪に向かうようにして、車両の後退を伴うことなく当該発進を可能にしたものである。
【特許文献1】特許第3301296号明細書
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、運転者がアクセル操作により登坂路での停車状態を維持しようとするとき、上記のものに代表される従来の停車時後退防止技術は対応しておらず、
結果として、運転者のアクセル操作に応じて運転される動力源の出力トルクのうち、後退防止用に必要なトルク分だけが車輪に向かい、残余のトルクは上記断接手段のスリップにより消失させることによって、登坂路停車時の後退防止を遂行することになる。
【0005】
このため、運転者がアクセル操作により登坂路停車時の後退防止を行おうとするとき、断接手段のスリップ制御が不可欠で、上記残余トルクの消失による燃費の悪化を招くだけでなく、断接手段のスリップに伴う発熱や摩耗で耐久性が低下するという問題も生ずる。
【0006】
なお、登坂路停車時の後退防止に当たっては、路面勾配を検出し、検出した路面勾配下で後退防止を実現可能な自動ブレーキ力(ヒルホールドブレーキ力)を求め、このブレーキ力が発生するようブレーキアクチュエータによりブレーキ装置を作動させることが考えられる。
【0007】
しかしこの場合、登坂路停車時で後退防止用のアクセル操作を行っていないのに車両が後退を防止され、運転者に違和感を与える。
【0008】
本発明は、後者の問題回避のため、あくまで、運転者がアクセル操作によって登坂路停車時の後退防止を実現するようにした型式の停車時後退防止装置を前提とし、
それにもかかわらず、燃費の悪化や、車輪駆動系における断接手段の耐久性(発熱、摩耗)に関する前者の問題を生ずることのないようにした停車時後退防止装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
この目的のため、本発明による停車時後退防止装置は、請求項1に記載したごとくに構成する。
先ず前提となる車両を説明するに、
動力源および車輪間の車輪駆動系に伝達トルク容量可変式の断接手段を具え、
運転者のブレーキ操作とは別にブレーキユニットを作動させて車輪制動力を発生させる自動ブレーキ手段を有し、
運転者のアクセル操作に対応するアクセル対応目標車輪駆動力をもとに、前記動力源の出力および断接手段の伝達トルク容量を決定するようにした車両を要旨構成の基礎前提とする。
【0010】
本発明の停車時後退防止装置は、かかる車両に対し、
運転者がアクセル操作により、車両の対地速度が零以下の停車状態を希望する間、該アクセル操作に応じて前記自動ブレーキ手段による車輪の停車用自動ブレーキ力を決定する停車用自動ブレーキ力決定手段と、
前記停車中のアクセル操作に対応するアクセル対応目標車輪駆動力から、前記停車用自動ブレーキ力を差し引いて得られる差値を、前記動力源の停車時出力および前記断接手段の停車時伝達トルク容量とする停車時車輪駆動力決定手段とを具備してなることを特徴とするものである。
【発明の効果】
【0011】
上記した本発明による停車時後退防止装置によれば、
停車中のアクセル操作に応じた停車用自動ブレーキ力により停車状態を達成して後退防止を実現するため、
アクセル操作により停車状態(後退防止)を実現するといえども、車輪駆動系の断接手段をスリップ制御はアクセル操作対応駆動力の一時的な過剰分を逃がす程度の僅かなものでよく、断接手段のスリップに伴う燃費の悪化や、耐久性(発熱および摩耗)の低下に関する問題をほとんど生ずることがない。
【0012】
また、上記の後退防止制御が停車中のアクセル操作に呼応して行われることから、
何らかの後退防止操作が必要な登坂路停車中で、何ら後退防止用の操作を行っていないのに車両が後退を防止される違和感を運転者に与えることもない。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施の形態を、図面に示す実施例に基づき詳細に説明する。
図1は、本発明の一実施例になる停車時後退防止装置を具えたフロントエンジン・リヤホイールドライブ車両のパワートレーンを、その制御系とともに示し、
1は、動力源としてのエンジン、2は自動変速機、3L,3Rは左右駆動車輪、4はディファレンシャルギヤ装置である。
【0014】
自動変速機2は一般的な歯車変速機構よりなるものであるが、トルクコンバータを内蔵せず、車輪駆動系における伝達トルク容量可変式断接手段の用をなす発進クラッチ2a(前進1速選択用、または後進段選択用のクラッチ)を具え、この発進クラッチ2aをスリップ制御することでトルクコンバータの機能を持たせたものとする。
【0015】
この自動変速機2は、エンジン1からの回転を選択変速段に応じ変速して出力し、自動変速機2からの出力回転がディファレンシャルギヤ装置4を経て左右駆動車輪3L,3Rに達することで車両を走行させることができる。
停車に際しては、自動ブレーキ手段の用をもなすブレーキアクチュエータ(ブレーキユニット)5L,5Rを作動させて車輪3L,3Rを制動することにより車両を停車させることができる。
【0016】
エンジン1および発進クラッチ2aはエンジンコントローラ10により制御し、ブレーキアクチュエータ5L,5Rによる車輪3L,3Rの制動力制御は、ブレーキコントローラ20により遂行する。
【0017】
このため、エンジンコントローラ10には、アクセルペダル踏み込み量(アクセル開度)APOを検出するアクセル開度センサ31からの信号と、
車両の対地速度である車速VSPを検出する車速センサ32からの信号と、
制動操作があるときにONとなるブレーキスイッチ33からの信号と、
路面勾配θを検出する勾配センサ34(勾配検出手段)からの信号(ブレーキコントローラ20を経由する)とを入力する。
【0018】
またブレーキコントローラ20には、制動操作力対応のブレーキ液圧Pmを検出するブレーキ液圧センサ35からの信号と、
上記した路面勾配θ(正値が登坂路勾配、負値が降坂路勾配)を検出する勾配センサ34からの信号とを入力するほか、
エンジンコントローラ10からの後述するヒルホールドブレーキ力(停車用自動ブレーキ力)hTbおよびヒルホールドフラグFLAGを入力する。
【0019】
エンジンコントローラ10およびブレーキコントローラ20は、停車時後退防止制御部を図2の機能別ブロック線図により示すごとくに構成され、図3に示す制御プログラムを一定周期で繰り返し実行して、本発明が狙いとする停車時後退防止制御を以下のごとくに遂行するものとする。
【0020】
エンジンコントローラ10の停車時後退防止制御部は図2に示すごとく、目標駆動力演算部11と、ヒルホールド条件設定部12と、ヒルホールドブレーキ力設定部13と、減算器14と、駆動力→トルク変換部15と、トルク→スロットル開度変換部16と、トルク→クラッチ圧変換部17とを具える。
【0021】
かかるエンジンコントローラ10は、図3のステップS11において路面勾配θを読み込むと共に、ステップS12においてアクセル開度APOおよび車速VSPを読み込む。
エンジンコントローラ10内の目標駆動力演算部11は、図3のステップS13において、上記のアクセル開度APOおよび車速VSPにより表される現在の運転状態から運転者が要求しているアクセル対応目標車輪駆動力tTdを演算する。
この演算に当たっては、アクセル開度APOごとに車速VSPおよび目標駆動力tTdの関係を表した二次元マップを予め用意しておき、これをもとにアクセル開度APOおよび車速VSPからアクセル対応目標車輪駆動力tTdを検索して求める。
【0022】
エンジンコントローラ10内のヒルホールド条件設定部12は、図3のステップS14において路面勾配θが登坂路判定値θo以上か否かにより、車両が登坂路にいるか否かをチェックすると共に、ステップS15において車速VSPが停車判定値VSPo未満の停車状態か否かをチェックする。
ヒルホールド条件設定部12は、ステップS14で路面勾配θが登坂路判定値θo未満(登坂路でない)と判定したり、ステップS14でθ≧θo(登坂路)と判定しても、ステップS15でVSP≧VSPo(走行中)と判定するときは、登坂路停車時の後退防止制御(ヒルホールド制御)が不要であるから、ステップS16において、ヒルホールドフラグFLAGを0となし、ヒルホールド力ブレーキ配分率α(ヒルホールド力をブレーキ力により担う分担割合)も0%となす。
【0023】
ヒルホールド条件設定部12は、ステップS14で路面勾配θが登坂路判定値θo以上(登坂路)と判定し、且つ、ステップS15でVSP<VSPo(停車中)と判定するとき、つまり、登坂路停車時の後退防止制御(ヒルホールド制御)が必要であると判定するとき、
ステップS17において、ステップS13で求めたアクセル対応目標車輪駆動力tTdが、路面勾配θのもとで停車状態を維持するのに必要な勾配対応駆動力Td(θ)を越えているか否かにより、運転者が発進を要求したアクセル操作を行ったか否かをチェックする。
【0024】
ヒルホールド条件設定部12は、ステップS17でtTd≦Td(θ)と判定する間、つまり運転者が発進を要求したアクセル操作を行っていないと判定する間、
ステップS18において、ヒルホールドフラグFLAGを1となし、ヒルホールド力ブレーキ配分率αを、α=α(前回値)+Δα(一定値)により演算する。
かかる演算により求めたヒルホールド力ブレーキ配分率αは、Δα(一定値)により決まる一定の時間変化割合で増大するが、初期値を0%、下限値を0%、上限値を100%とする。
【0025】
ヒルホールド条件設定部12は、ステップS17でtTd>Td(θ)と判定する間、つまり運転者が発進を要求したアクセル操作を行ったと判定する間、
ステップS19において、ヒルホールドフラグFLAGを1となし、ヒルホールド力ブレーキ配分率αを、α=α(前回値)−Δα(一定値)により演算する。
かかる演算により求めたヒルホールド力ブレーキ配分率αは、Δα(一定値)により決まる一定の時間変化割合で低下する。
【0026】
エンジンコントローラ10内のヒルホールドブレーキ力設定部13は、図3のステップS20において、ヒルホールド条件設定部12がステップS16またはステップS18或いはステップS19で上記のごとくに決定したヒルホールド力ブレーキ配分率α、および、目標駆動力演算部11(ステップS13)で求めたアクセル対応目標車輪駆動力tTdを用い、
登坂路停車時後退防止用のブレーキ力であるヒルホールドブレーキ力hTbをhTb=tTd×αの演算により求める。
従ってヒルホールドブレーキ力設定部13およびステップS20は、本発明における停車用自動ブレーキ力決定手段に相当する。
【0027】
エンジンコントローラ10内の減算器14は、図3のステップS21において、アクセル対応目標車輪駆動力tTdからヒルホールドブレーキ力hTbを差し引いて得られる両者の差値をクラッチ経由車輪駆動力cTd(停車時エンジン出力および停車時クラッチ伝達トルク容量)とすべく、このクラッチ経由車輪駆動力cTdをcTd=tTd−hTbの演算により求める。
従って減算器14およびステップS21は、本発明における停車時車輪駆動力決定手段に相当する。
【0028】
エンジンコントローラ10内の駆動力→トルク変換部15は、上記のクラッチ経由車輪駆動力cTdをトルク値に変換して、このトルク値を目標エンジントルクと定めるほか、このトルク値を発進クラッチ2a(図1参照)の目標クラッチ伝達トルク容量と定める。
エンジンコントローラ10内のトルク→スロットル開度変換部16は、図1のエンジン1が上記の目標エンジントルクを出力するのに必要な目標スロットル開度tTVOを求め、
エンジンコントローラ10内のトルク→クラッチ圧変換部17は、図1に示す発進クラッチ2aの伝達トルク容量が上記の目標クラッチ伝達トルク容量となるのに必要な発進クラッチ2aの目標クラッチ圧tPcを求める。
【0029】
トルク→スロットル開度変換部16からの目標スロットル開度tTVO、および、トルク→クラッチ圧変換部17からの目標クラッチ圧tPcは、図1に示すようにエンジン1のスロットル開度制御および発進クラッチ2aの締結力制御に供され、
エンジン1は、その出力トルクが上記の目標エンジントルクとなるようスロットル開度を制御され、発進クラッチ2aは、その伝達トルク容量が上記の目標クラッチ伝達トルク容量となるよう締結力を制御される。
【0030】
ブレーキコントローラ20の停車時後退防止制御部は図2に示すように、ペダル操作対応ブレーキ力設定部27と、セレクトハイ(MAX)部22と、セレクタ23とで構成する。
ペダル操作対応ブレーキ力設定部27は、ブレーキペダルの踏み込みにより発生するブレーキ液圧(マスターシリンダ液圧)Pmの検出値をもとに、ブレーキペダルの踏み込み操作に対応したペダル操作対応ブレーキ力pTbを設定する。
【0031】
セレクトハイ(MAX)部22は、かかるペダル操作対応ブレーキ力pTbと、前記した登坂路停車時後退防止用のヒルホールドブレーキ力hTbとの大きい方MAX(pTb,hTb)を選択し、
セレクタ23は、ヒルホールドフラグFLAGに応じ、FLAG=1のとき当該選択されたセレクトハイブレーキ力MAX(pTb,hTb)を目標ブレーキ力tTbとし、FLAG=0のときペダル操作対応ブレーキ力pTbを目標ブレーキ力tTbとするものである。
かように決定した目標ブレーキ力tTbは、図1に示すようにブレーキアクチュエータ5L,5Rに指令され、これらブレーキアクチュエータ5L,5Rは車輪3L,3Rのブレーキ力を、目標ブレーキ力tTbが達成されるよう制御する。
【0032】
上記実施例の作用を図4にもとづき以下に説明する。
図4は、登坂路走行中にアクセルペダルを釈放してブレーキペダル操作なしに車両を、車速VSPが図示のごとく低下するよう減速させ、瞬時t1に停車により車速VSPが停車判定車速VSPo未満になり、その後の瞬時t2より、運転者が図示のアクセル開度APO(アクセル操作)によって停車状態を維持しようとした場合のヒルホールド(登坂路停車時後退防止)制御を示す動作タイムチャートである。
【0033】
車速VSPが停車判定車速VSPo未満になった瞬時t1より、車速VSPが停車判定車速VSPoを越えてヒルホールドフラグFLAG=0になるまでの間(ステップS15、ステップS16)、ヒルホールドフラグFLAG=1(ステップS18、ステップS19)により、登坂路停車状態を保つためのヒルホールド力を自動ブレーキに分担させることを許可するヒルホールド力ブレーキ配分許可信号を図4の瞬時t1以後に示すように出力し続ける。
【0034】
かかるヒルホールド力ブレーキ配分許可信号(ヒルホールドフラグFLAG=1)が出力されている間、図4の瞬時t2以後における停車維持用(後退防止用)アクセル開度APO(アクセル操作)に対応して図示のごとくに変化するアクセル対応目標駆動力tTdが勾配対応駆動力Td(θ)以下であれば(ステップS17)、ヒルホールド力ブレーキ配分率αをステップS18につき前述したごとく、100%を上限値としてΔα(一定値)により決まる一定の時間変化割合で増大させる。
【0035】
一方で図4の瞬時t3〜t4間におけるごとくアクセル対応目標駆動力tTdが勾配対応駆動力Td(θ)以上であれば(ステップS17)、ヒルホールド力ブレーキ配分率αをステップS19につき前述したごとく、0%を下限値としてΔα(一定値)により決まる一定の時間変化割合で低下させる。
従ってヒルホールド力ブレーキ配分率αは、図4に示すように時系列変化する。
【0036】
かかるヒルホールド力ブレーキ配分率αを、アクセル対応目標駆動力tTdに乗じて得られるヒルホールドブレーキ力hTb(ステップS20)は、図4に示すごときものとなり、
また、アクセル対応目標駆動力tTdからヒルホールドブレーキ力hTbを差し引いて得られるクラッチ経由車輪駆動力cTd(ステップS21)は、図4に示すごときものとなる。
【0037】
図4に示すヒルホールドブレーキ力hTbは、図2のセレクトハイ(MAX)部22に供給され、ペダル操作対応ブレーキ力pTbと対比されるが、ブレーキペダルが踏み込まれていないためブレーキ液圧Pmが零であるから、セレクトハイ(MAX)部22はヒルホールドブレーキ力hTbを選択する。
そしてセレクタ23は、上記したヒルホールドフラグFLAG=1に呼応して、セレクトハイ(MAX)部22が選択したヒルホールドブレーキ力hTbを目標ブレーキ力tTbとし、これを、図1に示すようにブレーキアクチュエータ5L,5Rに指令する。
【0038】
図4に示すクラッチ経由車輪駆動力cTdは、図2に示す駆動力→トルク変換部15においてトルク値に変換されると共に、このトルク値を目標エンジントルクおよびを発進クラッチ2a(図1参照)の目標クラッチ伝達トルク容量と定め、
これら目標エンジントルクおよびを目標クラッチ伝達トルク容量が実現されるよう、図1のエンジン1のスロットル開度制御および発進クラッチ2aの締結力制御を遂行する。
【0039】
かかる本実施例のヒルホールド制御(登坂路停車時後退防止制御)によれば、
登坂路停車中のアクセル操作に応じたヒルホールドブレーキ力hTb(停車用自動ブレーキ力)により停車状態を達成して登坂路後退防止を実現し得るため、
アクセル操作により停車状態(後退防止)を実現するといえども、車輪駆動系における発進クラッチ2aのスリップ制御は、アクセル操作対応目標駆動力tTdの過剰分を逃がす程度のごく僅かなスリップを生じさせるだけでよく、発進クラッチ2aのスリップに伴う燃費の悪化や、耐久性(発熱および摩耗)の低下に関する問題をほとんど生ずることがない。
【0040】
また、上記の後退防止制御が停車中のアクセル操作に呼応して行われることから、
何らかの後退防止操作が必要な登坂路停車中で、何ら後退防止用の操作を行っていないのに車両が後退を防止される違和感を運転者に与えることもない。
【0041】
上記実施例の発進時における作用を図5にもとづき以下に説明する。
図5は、登坂路走行中にアクセルペダルを釈放してブレーキペダル操作なしに車両を、車速VSPが図示のごとく低下するよう減速させ、瞬時t1に停車により車速VSPが停車判定車速VSPo未満になり、その後の瞬時t2より、運転者が図示のアクセル開度APO(アクセル操作)によって停車状態を維持しようとした場合のヒルホールド(登坂路停車時後退防止)制御と、
瞬時t5より、運転者が図示のアクセル開度APOの増大(アクセルペダルの踏み込み操作)によって停車状態の車両を発進させようとした場合の発進(ヒルホールド終了)制御とを示す動作タイムチャートである。
【0042】
車速VSPが停車判定車速VSPo未満になった瞬時t1より、車速VSPが停車判定車速VSPoを越えてヒルホールドフラグFLAG=0になる瞬時t6までの間(ステップS15、ステップS16)、ヒルホールドフラグFLAG=1(ステップS18、ステップS19)により、登坂路停車状態を保つためのヒルホールド力を自動ブレーキに分担させることを許可するヒルホールド力ブレーキ配分許可信号を図5の瞬時t1〜t6間に示すように出力する。
【0043】
かかるヒルホールド力ブレーキ配分許可信号(ヒルホールドフラグFLAG=1)が出力されている間、図5の瞬時t2〜t5間における停車維持用(後退防止用)アクセル開度APO(アクセル操作)に対応して図示のごとくに変化するアクセル対応目標駆動力tTdが勾配対応駆動力Td(θ)以下であれば(ステップS17)、ヒルホールド力ブレーキ配分率αをステップS18につき前述したごとく、100%を上限値としてΔα(一定値)により決まる一定の時間変化割合で増大させる。
【0044】
一方で図5の瞬時t3〜t4間におけるごとくアクセル対応目標駆動力tTdが勾配対応駆動力Td(θ)以上であれば(ステップS17)、ヒルホールド力ブレーキ配分率αをステップS19につき前述したごとく、0%を下限値としてΔα(一定値)により決まる一定の時間変化割合で低下させる。
従ってヒルホールド力ブレーキ配分率αは、図5の瞬時t1〜t5の間、図示のように時系列変化する。
【0045】
かかるヒルホールド力ブレーキ配分率αを、アクセル対応目標駆動力tTdに乗じて得られるヒルホールドブレーキ力hTb(ステップS20)は、図5の瞬時t1〜t5の間に示すごときものとなり、
また、アクセル対応目標駆動力tTdからヒルホールドブレーキ力hTbを差し引いて得られるクラッチ経由車輪駆動力cTd(ステップS21)は、図5の瞬時t1〜t5の間に示すごときものとなり、
図4につき前述したと同様なヒルホールド制御、および、同様な作用効果を達成することができる。
【0046】
ところで図5の瞬時t5より、運転者が図示のアクセル開度APOの増大(アクセルペダルの踏み込み操作)によって停車状態の車両を発進させようとした場合、
これに伴いアクセル対応目標駆動力tTdが図5の瞬時t5以降、図示のごとくに増大して勾配対応駆動力Td(θ)以上になることから(ステップS17)、ヒルホールド力ブレーキ配分率αがステップS19につき前述したごとく、Δα(一定値)により決まる一定の時間変化割合で低下され、ついには下限値の0%になる。
【0047】
かかるヒルホールド力ブレーキ配分率αを、アクセル対応目標駆動力tTdに乗じて得られるヒルホールドブレーキ力hTb(ステップS20)は、図5の瞬時t5以後に示すごとくに低下され、
アクセル対応目標駆動力tTdからヒルホールドブレーキ力hTbを差し引いて得られるクラッチ経由車輪駆動力cTd(ステップS21)は逆に、図5の瞬時t5以後に示すごとくに増大される。
かかるヒルホールドブレーキ力hTbの低下、および、クラッチ経由車輪駆動力cTdの増大により車両を、図5の瞬時t6以後における車速VSPの上昇変化から明らかなように発進させて、ヒルホールド制御を終了させることができる。
【0048】
なお、ヒルホールド力ブレーキ配分率αの増大、低下に係わる時間変化割合を決定するΔα(一定値)は、ヒルホールド力ブレーキ配分率αの時間変化割合が、ヒルホールドブレーキ力hTbおよびクラッチ経由車輪駆動力cTdの急変に伴うショックを生じない範囲でできるだけ大きなものとなるよう定め、これにより、ヒルホールド制御開始応答およびヒルホールド制御終了応答を高めるのがよい。
なお実施例では、ヒルホールド力ブレーキ配分率増大用と、低下用とで同じΔα(一定値)を用いたが、異ならせてもよいのは言うまでもない。
【0049】
図6〜8は本発明の他の実施例を示す。
本実施例においてはエンジンコントローラ10およびブレーキコントローラ20の停車時後退防止制御部を図6の機能別ブロック線図により示すごとくに構成し、図7に示す制御プログラムを一定周期で繰り返し実行して、本発明が狙いとする停車時後退防止制御を以下のごとくに遂行するものとする。
【0050】
ブレーキコントローラ20の停車時後退防止制御部は図6に示すように、図2に示す前記実施例におけると同様な、ペダル操作対応ブレーキ力設定部27と、セレクトハイ(MAX)部22と、セレクタ23とで構成するため、ここでの重複説明を省略する。
【0051】
エンジンコントローラ10の停車時後退防止制御部は図6に示すように、図2に示す前記実施例と同様な、目標駆動力演算部11、ヒルホールド条件設定部12、ヒルホールドブレーキ力設定部13、減算器14、駆動力→トルク変換部15、トルク→スロットル開度変換部16、およびトルク→クラッチ圧変換部17を具えるほかに、微分器18を設け、
ヒルホールド条件設定部12への入力信号として、図2における路面勾配θの代わりに図1につき前述したブレーキスイッチ33からの信号を入力する。
【0052】
微分器18はアクセル開度APOの検出値を入力され、一定の演算周期ごとに、アクセル開度APOの前回読み込み値と、今回読み込み値との間における差から、アクセル開度APOの時間変化率ΔAPO(=今回値−前回値)を演算し、
このアクセル開度時間変化率ΔAPOをヒルホールド条件設定部12およびヒルホールドブレーキ力設定部13に入力する。
従って微分器18は、本発明におけるアクセル操作速度検出手段に相当する。
【0053】
ヒルホールド条件設定部12は、ブレーキスイッチ33からの信号と、検出車速VSPを入力され、ブレーキスイッチ33がOFFで(運転者が制動操作を行っていなくて)、且つ、車速VSPが停車判定車速VSPo未満であるか否かを、つまり、ブレーキ操作なしに停車状態を保っているか否かを判定し、
そうでなければ、つまり、ブレーキ操作により停車状態を保っていたり、停車状態ではなくて走行状態であれば、アクセル操作による停車状態でないことからヒルホールドフラグFLAGを0にリセットすると共に、ヒルホールド力ブレーキ配分率αを0%にする。
【0054】
ヒルホールド条件設定部12は、ブレーキスイッチ33がOFFで(運転者が制動操作を行っていなくて)、且つ、車速VSPが停車判定車速VSPo未満であると判定するとき、つまり、ブレーキ操作なしに停車状態を保っていると判定する場合、
アクセル操作により停車状態を維持することになるため、ヒルホールドフラグFLAGを1にセットすると共に、ヒルホールド力ブレーキ配分率αを、
α=α(前回値)−K・ΔAPO+C
ただし、K:係数
C:一定値
の演算により求める。
【0055】
かかる演算により求めたヒルホールド力ブレーキ配分率αは、アクセル開度APOの時間変化率ΔAPO(正値が増加率、負値が低下率)に応じた(−K・ΔAPO+C)により決まる時間変化割合で変化する(ΔAPO>C/Kのアクセル開度増加中αは0%に向け低下、ΔAPO<C/Kのアクセル開度低下中αは100%に向け増大、ΔAPO=0のアクセル開度保持中αはCにより決まる一定速度で100%に向け増大する)。
【0056】
ヒルホールドブレーキ力設定部13は、ヒルホールド条件設定部12が上記のごとくに決定したヒルホールド力ブレーキ配分率α、および、目標駆動力演算部11からのアクセル対応目標車輪駆動力tTdを用い、
登坂路停車時後退防止用のブレーキ力であるヒルホールドブレーキ力hTbをhTb=tTd×αの演算により求める。
【0057】
図2につき前述したと同様に、減算器14は、アクセル対応目標車輪駆動力tTdから上記のヒルホールドブレーキ力hTbを差し引いて得られる両者の差値をクラッチ経由車輪駆動力cTd(停車時エンジン出力および停車時クラッチ伝達トルク容量)とすべく、このクラッチ経由車輪駆動力cTdをcTd=tTd−hTbの演算により求め、
駆動力→トルク変換部15は、上記のクラッチ経由車輪駆動力cTdをトルク値に変換して、このトルク値を目標エンジントルクと定めるほか、このトルク値を発進クラッチ2a(図1参照)の目標クラッチ伝達トルク容量と定める。
【0058】
上記の本実施例になる図6に示したエンジンコントローラ10の停車時後退防止部をマイクロコンピュータで構成する場合、
当該エンジンコントローラ10の停車時後退防止部は、図7に示す制御プログラムを一定周期で繰り返し実行して本発明が狙いとするヒルホールド制御を遂行する。
【0059】
ステップS31においては、ブレーキスイッチ33からの信号を読み込み、ステップS32においては、センサ32(図1参照)で検出した車速VSPを読み込み、ステップS33においては、センサ31で検出したアクセル開度APOを読み込む。
次のステップS34においては、ステップS32で読み込んだ車速VSPおよびステップS33で読み込んだアクセル開度APOにより表される現在の運転状態から運転者が要求しているアクセル対応目標車輪駆動力tTdを演算する。
この演算に当たっては、アクセル開度APOごとに車速VSPおよび目標駆動力tTdの関係を表した二次元マップを予め用意しておき、これをもとにアクセル開度APOおよび車速VSPからアクセル対応目標車輪駆動力tTdを検索して求める。
【0060】
次のステップS35においては、一定の演算周期ごとにステップS33で読み込むアクセル開度APOの前回読み込み値と、今回読み込み値との間における差から、アクセル開度APOの時間変化率ΔAPO(=今回値−前回値)を演算する。
次いでステップS36において、ステップS31で読み込んだブレーキスイッチ信号と、ステップS32で読み込んだ車速VSPをもとに、ブレーキスイッチ33がOFFで(運転者が制動操作を行っていなくて)、且つ、車速VSPが停車判定車速VSPo未満であるか否かを、つまり、ブレーキ操作なしに停車状態を保つヒルホールド状態か否かを判定する。
【0061】
ステップS36でブレーキ操作なしに停車状態を保つヒルホールドでないと判定する場合、つまり、ブレーキ操作により停車状態を保っていたり、停車状態ではなくて走行状態である場合は、
アクセル操作による停車状態でないことからステップS37において、ヒルホールドフラグFLAGを0にリセットすると共に、ヒルホールド力ブレーキ配分率αを0%にする。
【0062】
ステップS36において、ブレーキスイッチ33がOFFで(運転者が制動操作を行っていなくて)、且つ、車速VSPが停車判定車速VSPo未満であると判定するとき、つまり、ブレーキ操作なしに停車状態を保っていると判定する場合、
アクセル操作により停車状態を維持することになるため、ステップS38において、ヒルホールドフラグFLAGを1にセットすると共に、ヒルホールド力ブレーキ配分率αを、前記した演算式
α=α(前回値)−K・ΔAPO+C
ただし、K:係数
C:一定値
の演算により算出する。
【0063】
かかる演算により求めたヒルホールド力ブレーキ配分率αは前述したとおり、アクセル開度APOの時間変化率ΔAPO(正値が増加率、負値が低下率)に応じた(−K・ΔAPO+C)により決まる時間変化割合で変化する(ΔAPO>C/Kのアクセル開度増加中αは低下、ΔAPO=0を含むΔAPO<C/Kのアクセル操作中αは増大)。
【0064】
次のステップS39においては、ステップS37またはステップS38で上記のごとくに決定したヒルホールド力ブレーキ配分率α、および、ステップS34で前記のごとくに求めたアクセル対応目標車輪駆動力tTdを用い、
登坂路停車時後退防止用のブレーキ力であるヒルホールドブレーキ力hTbをhTb=tTd×αの演算により求める。
従ってステップS39は、本発明における停車用自動ブレーキ力決定手段に相当する。
【0065】
その後ステップS40において、アクセル対応目標車輪駆動力tTdから上記のヒルホールドブレーキ力hTbを差し引いて得られる両者の差値をクラッチ経由車輪駆動力cTd(停車時エンジン出力および停車時クラッチ伝達トルク容量)とすべく、このクラッチ経由車輪駆動力cTdをcTd=tTd−hTbの演算により求める。
従ってステップS40は、本発明における停車時車輪駆動力決定手段に相当する。
このクラッチ経由車輪駆動力cTdは、図6の駆動力→トルク変換部15につき前述したようにトルク値に変換し、このトルク値を目標エンジントルクと定めるほか、このトルク値を発進クラッチ2a(図1参照)の目標クラッチ伝達トルク容量と定める。
【0066】
上記実施例の作用を図8にもとづき以下に説明する。
図8は、登坂路走行中にアクセルペダルを釈放してブレーキペダル操作なしに車両を、車速VSPが図示のごとく低下するよう減速させ、瞬時t1に停車により車速VSPが停車判定車速VSPo未満になり、その後の瞬時t2より、運転者が図示のアクセル開度APO(アクセル操作)によって停車状態を維持しようとした場合のヒルホールド(登坂路停車時後退防止)制御を示す動作タイムチャートである。
【0067】
車速VSPが停車判定車速VSPo未満になった瞬時t1より、後述の発進により車速VSPが停車判定車速VSPoを越えてヒルホールドフラグFLAG=0になる(ステップS36、ステップS37)瞬時t6までの間、ヒルホールドフラグFLAG=1(ステップS36、ステップS38)により、登坂路停車状態を保つためのヒルホールド力を自動ブレーキに分担させることを許可するヒルホールド力ブレーキ配分許可信号を図示のごとくに出力し続ける。
【0068】
かかるヒルホールド力ブレーキ配分許可信号(ヒルホールドフラグFLAG=1)が出力されている間、図8の瞬時t2以後における停車維持用(後退防止用)アクセル開度APO(アクセル操作)に対応して、アクセル対応目標駆動力tTdも図示のごとくに増大する。
かかる停車維持用(後退防止用)アクセル操作(アクセル開度APOの増大)が行われる前の瞬時t1〜t2においては、アクセル開度APOの時間変化率ΔAPOがΔAPO=0で、アクセル開度保持中のため、ヒルホールド力ブレーキ配分率αは前記した一定値Cにより決まる一定速度で0%から100%に向け増大する。
【0069】
しかして瞬時t2以後は、停車維持用(後退防止用)アクセル操作(アクセル開度APOの増大)によりその時間変化率ΔAPOがΔAPO>C/Kになったことで、ヒルホールド力ブレーキ配分率αは前記した(−K・ΔAPO+C)により決まる、ΔAPOに応じた時間変化割合で0%に向け低下する。
【0070】
その後、瞬時t3にアクセル開度APOの増大を止めて、それ以降アクセル開度APOを、停車維持用(後退防止用)の値近辺に保つアクセル操作を行ったことから、そしてアクセル開度APOの増大を止めた瞬時t3に車速VSPが停車判定車速VSPoを越えなかったことから、
ヒルホールド力ブレーキ配分率αは、アクセル開度APOの時間変化率ΔAPOがΔAPO<C/KまたはΔAPO=0であることに呼応して、前記した(−K・ΔAPO+C)により決まる、ΔAPOに応じた時間変化割合、若しくは一定値Cにより決まる一定速度で100%に向け増大する。
【0071】
瞬時t1〜t5間においては、ヒルホールド力ブレーキ配分率αが以上のように変化することにより、ヒルホールドブレーキ力hTb(=tTd×α)、および、クラッチ経由車輪駆動力cTd(=tTd−hTb)はそれぞれ、図8の最下段に示すように時系列変化する。
【0072】
図8に示すヒルホールドブレーキ力hTbは、図6のセレクトハイ(MAX)部22に供給され、ペダル操作対応ブレーキ力pTbと対比されるが、ブレーキペダルが踏み込まれていないためブレーキ液圧Pmが零であるから、セレクトハイ(MAX)部22はヒルホールドブレーキ力hTbを選択する。
そしてセレクタ23は、上記したヒルホールドフラグFLAG=1に呼応して、セレクトハイ(MAX)部22が選択したヒルホールドブレーキ力hTbを目標ブレーキ力tTbとし、これを、図1に示すようにブレーキアクチュエータ5L,5Rに指令する。
【0073】
図8に示すクラッチ経由車輪駆動力cTdは、図6に示す駆動力→トルク変換部15においてトルク値に変換されると共に、このトルク値を目標エンジントルクおよびを発進クラッチ2a(図1参照)の目標クラッチ伝達トルク容量と定め、
これら目標エンジントルクおよびを目標クラッチ伝達トルク容量が実現されるよう、図1のエンジン1のスロットル開度制御および発進クラッチ2aの締結力制御を遂行する。
【0074】
かかる本実施例のヒルホールド制御(登坂路停車時後退防止制御)によれば、
登坂路停車中のアクセル操作に応じたヒルホールドブレーキ力hTb(停車用自動ブレーキ力)により停車状態を達成して登坂路後退防止を実現するため、
アクセル操作により停車状態(後退防止)を実現するといえども、車輪駆動系における発進クラッチ2aのスリップ制御は、アクセル操作対応目標駆動力tTdの過剰分を逃がす程度のごく僅かなスリップを生じさせるだけでよく、発進クラッチ2aのスリップに伴う燃費の悪化や、耐久性(発熱および摩耗)の低下に関する問題をほとんど生ずることがない。
【0075】
また、上記の後退防止制御が停車中のアクセル操作に呼応して行われることから、
何らかの後退防止操作が必要な登坂路停車中で、何ら後退防止用の操作を行っていないのに車両が後退を防止される違和感を運転者に与えることもない。
【0076】
これらの作用効果は、前記した第1実施例によると同じものであるが、第1実施例においてはかかる作用効果を達成するのに、路面勾配θを検出する勾配センサ34が不可欠であった。
しかし本実施例においては、既存のアクセル開度センサ31からの信号を微分して得られるアクセル開度時間変化割合ΔAPOを用いて同様な作用効果を達成し得ることから、コスト的に大いに有利である。
【0077】
次いで、上記停車時後退防止制御の後、図8の瞬時t5に運転者が図示のアクセル開度APOの増大(アクセルペダルの踏み込み操作)によって停車状態の車両を発進させようとした場合の発進(ヒルホールド終了)制御を説明する。
図8の瞬時t5より、運転者が発進を希望してアクセル開度APOを図示のごとく増大させた(アクセルペダルの踏み込み操作を行った)場合、これに伴いアクセル対応目標駆動力tTdが図8の瞬時t5以降、図示のごとくに増大する。
【0078】
一方、発進用の上記アクセルペダルの踏み込みによりアクセル開度APOの増大速度ΔAPOがΔAPO>C/Kになったことで、ヒルホールド力ブレーキ配分率αは前記した(−K・ΔAPO+C)により決まる、ΔAPOに応じた時間変化割合で低下され、ついには下限値の0%になる(ステップS38)。
【0079】
かように低下するヒルホールド力ブレーキ配分率αを、アクセル対応目標駆動力tTdに乗じて得られるヒルホールドブレーキ力hTb(ステップS39)は、図8の瞬時t5以後に示すごとくに低下され、
アクセル対応目標駆動力tTdからヒルホールドブレーキ力hTbを差し引いて得られるクラッチ経由車輪駆動力cTd(ステップS40)は逆に、図8の瞬時t5以後に示すごとくに増大される。
かかるヒルホールドブレーキ力hTbの低下、および、クラッチ経由車輪駆動力cTdの増大により車両を、図8の瞬時t6以後における車速VSPの上昇変化から明らかなように発進させて、ヒルホールド制御を終了させることができる。
【0080】
なお、ヒルホールド力ブレーキ配分率αの増大、低下に係わる時間変化割合を決定する係数Kおよび一定値Cは、ヒルホールド力ブレーキ配分率αの時間変化割合が、ヒルホールドブレーキ力hTbおよびクラッチ経由車輪駆動力cTdの急変に伴うショックを生じない範囲でできるだけ大きなものとなるよう定め、これにより、ヒルホールド制御開始応答およびヒルホールド制御終了応答を高めるのがよい。
ところで本実施例においては、発進時におけるヒルホールド力ブレーキ配分率αの低下を前記した(−K・ΔAPO+C)により決まる、アクセル開度増大速度ΔAPOに応じた時間変化割合で行わせることから、
運転者がアクセル開度増大速度ΔAPOを速くした急発進時ほどヒルホールド力ブレーキ配分率αの低下(ヒルホールドブレーキ力hTbの低下、および、クラッチ経由車輪駆動力cTdの増大)を速やかに完遂させて、急発進の要求を満足させることができる。
【0081】
なお上記実施例ではいずれの場合も、図1に示すごとく動力源としてエンジン1のみを搭載し、エンジン回転を自動変速機2による変速下で車輪3L,3Rに向かわせるようなパワートレーンとし、自動変速機2の伝動系における発進クラッチ2aをトルクコンバータと同様に機能するようスリップ制御するようにした車両に対し、本発明の停車時後退防止装置を適用する場合について説明を展開したが、
本発明の停車時後退防止装置は、図9に例示するようなハイブリッド車両など、その他いかなる車両に対しても同様に適用することができるのは言うまでもない。
【0082】
図9のハイブリッド車両は、通常の後輪駆動車と同様にエンジン1の車両前後方向後方に自動変速機2をタンデムに配置し、エンジン1(詳しくはクランクシャフト1a)からの回転を自動変速機2の入力軸へ伝達する軸8に結合してモータ/ジェネレータ6を設ける。
【0083】
モータ/ジェネレータ6は、自動変速機2のコンバータハウジング内にトルクコンバータに代えて収納し、このコンバータハウジング内に固設した環状のステータ6aと、このステータ3a内に所定のエアギャップを持たせて同心に配置したロータ6bとよりなり、運転状態の要求に応じ、モータ(電動機)として作用したり、ジェネレータ(発電機)として作用するもので、エンジンクランクシャフト1aおよび自動変速機2の入力軸との間に介在させる。
モータ/ジェネレータ6は、ロータ6bの中心に上記の軸8を貫通して結着し、この軸8をモータ/ジェネレータ軸として利用する。
【0084】
かかるモータ/ジェネレータ6およびエンジン1間、詳しくは、モータ/ジェネレータ軸8とエンジンクランクシャフト1aとの間に第1クラッチ7を介挿し、この第1クラッチ7によりエンジン1およびモータ/ジェネレータ3間を切り離し可能に結合する。
ここで第1クラッチ7は、伝達トルク容量を連続的に変更可能なものとし、例えば、比例ソレノイドでクラッチ作動油流量およびクラッチ作動油圧を連続的に制御して伝達トルク容量を変更可能な湿式多板クラッチで構成する。
【0085】
モータ/ジェネレータ6および自動変速機2間は、モータ/ジェネレータ軸8と自動変速機2の入力軸との直接結合により相互に直結させる。
自動変速機2は、その変速機構部分が周知の遊星歯車式自動変速機と同様なものであるが、前進1速段選択時に係合しているクラッチ要素や、後進段選択時に係合しているクラッチ要素を、発進クラッチ2dとして用いてスリップ制御することでトルクコンバータの機能を持たせるものとする。
【0086】
以下、図9に示す上記したパワートレーンと具えるハイブリッド車両の選択モードごとの機能を説明する。
図9のパワートレーンにおいては、低負荷・低車速時に用いられる電気走行(EV)モードが要求される場合、第1クラッチ7を解放し、自動変速機2を所定変速段が選択された動力伝達状態にする。
【0087】
この状態でモータ/ジェネレータ6を駆動すると、当該モータ/ジェネレータ6からの出力回転のみが自動変速機2へ入力されることとなり、自動変速機2が当該入力回転を、選択中の変速段に応じ変速して出力する。
自動変速機2からの出力回転はその後、ディファレンシャルギヤ装置4を経て左右駆動輪3L,3Rに至り、車両をモータ/ジェネレータ6のみによるEVモードで電気走行(EV走行)させることができる。
【0088】
登坂路停車時の後退防止(ヒルホールド制御)や、高速走行時や、大負荷走行時や、バッテリの持ち出し可能電力が少ない時などで用いられるハイブリッド走行モード(HEVモード)が要求される場合、第1クラッチ7を締結すると共に、自動変速機2を所定変速段が選択された動力伝達状態にする。
この状態では、エンジン1からの出力回転、または、エンジン1からの出力回転およびモータ/ジェネレータ6からの出力回転の双方が自動変速機2へ入力されることとなり、自動変速機2が当該入力回転を、選択中の変速段に応じ変速して出力する。
自動変速機2からの出力回転はその後、ディファレンシャルギヤ装置4を経て左右駆動輪3L,3Rに至り、車両をエンジン1およびモータ/ジェネレータ6の双方によるHEVモードでハイブリッド走行させることができる。
【0089】
かかるHEV走行中において、エンジン1を最適燃費で運転させるとエネルギーが余剰となる場合、この余剰エネルギーによりモータ/ジェネレータ6を発電機として作動させることで余剰エネルギーを電力に変換し、この発電電力をモータ/ジェネレータ6のモータ駆動に用いるよう蓄電しておくことでエンジン1の燃費を向上させることができる。
【0090】
かかるハイブリッド車両に対し本発明による登坂路停車時の後退防止(ヒルホールド制御)を適用する場合、ハイブリッド車両を上記のHEVモードとなし、エンジン1からの出力回転のみが自動変速機2へ入力されるようにした状態で、本発明による登坂路停車時の後退防止(ヒルホールド制御)を以下のごとくに遂行する。
つまり、図9では図示を省略したが、図1におけると同様なブレーキアクチュエータ5L,5Rを作動させて、前記各実施例におけると同様なヒルホールドブレーキ力hTbを付与すると共に、前記各実施例におけると同様なクラッチ経由車輪駆動力cTdがエンジン1から発進クラッチ2aを経て車輪3L,3Rに向かうようエンジン1の出力(スロットル開度)制御および発進クラッチ2aの締結容量制御を行う。
【0091】
かかるハイブリッド車両に対し本発明による登坂路停車時の後退防止(ヒルホールド制御)を適用する場合も、前記した各実施例によると同様な作用効果を達成することができる。
【図面の簡単な説明】
【0092】
【図1】本発明の一実施例になる停車時後退防止装置を具えるフロントエンジン・リヤホイールドライブ車両のパワートレーンを、その制御系とともに示す略線図である。
【図2】図1におけるエンジンコントローラおよびブレーキコントローラの停車時後退防止部に係わる機能別ブロック線図である。
【図3】図1におけるエンジンコントローラが実行する停車時後退防止の制御プログラムを示すフローチャートである。
【図4】図1〜3に示す実施例による停車時後退防止制御の動作タイムチャートである。
【図5】図1〜3の実施例による停車時後退防止制御、および、その終了後における発進制御を示す動作タイムチャートである。
【図6】本発明の他の実施例を示す、図2と同様な停車時後退防止部の機能別ブロック線図である。
【図7】同実施例になる停車時後退防止の制御プログラムを示す、図3と同様なフローチャートである。
【図8】同実施例における停車時後退防止制御、および、その終了後における発進制御を示す、図5と同様な動作タイムチャートである。
【図9】本発明による停車時後退防止装置を適用可能なフロントエンジン・リヤホイールドライブ式ハイブリッド車両のパワートレーンを示す略線図である。
【符号の説明】
【0093】
1 エンジン(動力源)
2 自動変速機
2a 発進クラッチ(断接手段)
3L,3R 車輪
4 ディファレンシャルギヤ装置
5L,5R ブレーキアクチュエータ(ブレーキユニット:自動ブレーキ手段)
6 モータ/ジェネレータ(動力源)
7 第1クラッチ
8 モータ/ジェネレータ軸
10 エンジンコントローラ
11 目標駆動力演算部
12 ヒルホールド条件設定部
13 ヒルホールドブレーキ力設定部(停車用自動ブレーキ力決定手段)
14 減算器(停車時車輪駆動力決定手段)
15 駆動力→トルク変換部
16 トルク→スロットル開度変換部
17 トルク→クラッチ圧変換部
18 微分器(アクセル操作速度検出手段)
20 ブレーキコントローラ
21 ペダル操作対応ブレーキ力設定部
22 セレクトハイ部
23 セレクタ
31 アクセル開度センサ
32 車速センサ
33 ブレーキスイッチ
34 勾配センサ(勾配検出手段)
35 ブレーキ液圧センサ
【特許請求の範囲】
【請求項1】
動力源および車輪間の車輪駆動系に伝達トルク容量可変式の断接手段を具え、
運転者のブレーキ操作とは別にブレーキユニットを作動させて車輪制動力を発生させる自動ブレーキ手段を有し、
運転者のアクセル操作に対応するアクセル対応目標車輪駆動力をもとに、前記動力源の出力および断接手段の伝達トルク容量を決定するようにした車両において、
運転者がアクセル操作により、車両の対地速度が零以下の停車状態を希望する間、該アクセル操作に応じて前記自動ブレーキ手段による車輪の停車用自動ブレーキ力を決定する停車用自動ブレーキ力決定手段と、
前記停車中のアクセル操作に対応するアクセル対応目標車輪駆動力から、前記停車用自動ブレーキ力を差し引いて得られる差値を、前記動力源の停車時出力および前記断接手段の停車時伝達トルク容量とする停車時車輪駆動力決定手段とを具備してなることを特徴とする停車時後退防止装置。
【請求項2】
請求項1に記載の停車時後退防止装置において、
路面勾配を検出する勾配検出手段を設け、
前記停車用自動ブレーキ力決定手段は、前記停車中のアクセル対応目標車輪駆動力が、前記勾配検出手段により検出された路面勾配下で停車状態を保つのに必要な勾配対応車輪駆動力未満である間、前記停車用自動ブレーキ力を前記停車中のアクセル対応目標車輪駆動力に向けて増大させるものであることを特徴とする停車時後退防止装置。
【請求項3】
請求項2に記載の停車時後退防止装置において、
前記停車用自動ブレーキ力決定手段は、前記停車中のアクセル対応目標車輪駆動力が、前記勾配対応車輪駆動力以上である間、前記停車用自動ブレーキ力を零に向けて低下させるものであることを特徴とする停車時後退防止装置。
【請求項4】
請求項2または3に記載の停車時後退防止装置において、
前記停車用自動ブレーキ力決定手段は、前記停車用自動ブレーキ力の増大、低下を所定の時間変化割合で行わせるものであることを特徴とする停車時後退防止装置。
【請求項5】
請求項1に記載の停車時後退防止装置において、
前記アクセル操作の操作速度を検出するアクセル操作速度検出手段を設け、
前記停車用自動ブレーキ力決定手段は、前記検出したアクセル操作速度がアクセル開度の増大を示さない間、前記停車用自動ブレーキ力を前記停車中のアクセル対応目標車輪駆動力に向けて増大させるものであることを特徴とする停車時後退防止装置。
【請求項6】
請求項5に記載の停車時後退防止装置において、
前記停車用自動ブレーキ力決定手段は、前記検出したアクセル操作速度がアクセル開度の増大を示す間、前記停車用自動ブレーキ力を零に向けて低下させるものであることを特徴とする停車時後退防止装置。
【請求項7】
請求項6に記載の停車時後退防止装置において、
前記停車用自動ブレーキ力決定手段は、前記停車用自動ブレーキ力の低下を、前記検出したアクセル操作速度に比例した速度で行わせるものであることを特徴とする停車時後退防止装置。
【請求項8】
請求項1〜7のいずれか1項に記載の停車時後退防止装置において、
車両が動力源としてエンジンおよびモータ/ジェネレータを具え、これらエンジンおよび/またはモータ/ジェネレータからの動力により車輪を駆動して走行するハイブリッド車両であることを特徴とする停車時後退防止装置。
【請求項9】
請求項1〜8のいずれか1項に記載の停車時後退防止装置において、
車両が動力源としてエンジンおよびモータ/ジェネレータをタンデムに具え、
これらエンジンおよびモータ/ジェネレータ間を第1クラッチにより結合可能とし、
モータ/ジェネレータおよび駆動車輪間の車輪駆動系に第2クラッチを挿置し、
第1クラッチを解放すると共に第2クラッチを締結することによりモータ/ジェネレータからの動力のみによる電気走行モードを選択可能で、第1クラッチおよび第2クラッチをともに締結することにより、エンジンおよびモータ/ジェネレータの双方からの動力によるハイブリッド走行モードを選択可能なハイブリッド車両であり、
第2クラッチを前記断接手段として、前記伝達トルク容量制御の制御対象とすることを特徴とする停車時後退防止装置。
【請求項1】
動力源および車輪間の車輪駆動系に伝達トルク容量可変式の断接手段を具え、
運転者のブレーキ操作とは別にブレーキユニットを作動させて車輪制動力を発生させる自動ブレーキ手段を有し、
運転者のアクセル操作に対応するアクセル対応目標車輪駆動力をもとに、前記動力源の出力および断接手段の伝達トルク容量を決定するようにした車両において、
運転者がアクセル操作により、車両の対地速度が零以下の停車状態を希望する間、該アクセル操作に応じて前記自動ブレーキ手段による車輪の停車用自動ブレーキ力を決定する停車用自動ブレーキ力決定手段と、
前記停車中のアクセル操作に対応するアクセル対応目標車輪駆動力から、前記停車用自動ブレーキ力を差し引いて得られる差値を、前記動力源の停車時出力および前記断接手段の停車時伝達トルク容量とする停車時車輪駆動力決定手段とを具備してなることを特徴とする停車時後退防止装置。
【請求項2】
請求項1に記載の停車時後退防止装置において、
路面勾配を検出する勾配検出手段を設け、
前記停車用自動ブレーキ力決定手段は、前記停車中のアクセル対応目標車輪駆動力が、前記勾配検出手段により検出された路面勾配下で停車状態を保つのに必要な勾配対応車輪駆動力未満である間、前記停車用自動ブレーキ力を前記停車中のアクセル対応目標車輪駆動力に向けて増大させるものであることを特徴とする停車時後退防止装置。
【請求項3】
請求項2に記載の停車時後退防止装置において、
前記停車用自動ブレーキ力決定手段は、前記停車中のアクセル対応目標車輪駆動力が、前記勾配対応車輪駆動力以上である間、前記停車用自動ブレーキ力を零に向けて低下させるものであることを特徴とする停車時後退防止装置。
【請求項4】
請求項2または3に記載の停車時後退防止装置において、
前記停車用自動ブレーキ力決定手段は、前記停車用自動ブレーキ力の増大、低下を所定の時間変化割合で行わせるものであることを特徴とする停車時後退防止装置。
【請求項5】
請求項1に記載の停車時後退防止装置において、
前記アクセル操作の操作速度を検出するアクセル操作速度検出手段を設け、
前記停車用自動ブレーキ力決定手段は、前記検出したアクセル操作速度がアクセル開度の増大を示さない間、前記停車用自動ブレーキ力を前記停車中のアクセル対応目標車輪駆動力に向けて増大させるものであることを特徴とする停車時後退防止装置。
【請求項6】
請求項5に記載の停車時後退防止装置において、
前記停車用自動ブレーキ力決定手段は、前記検出したアクセル操作速度がアクセル開度の増大を示す間、前記停車用自動ブレーキ力を零に向けて低下させるものであることを特徴とする停車時後退防止装置。
【請求項7】
請求項6に記載の停車時後退防止装置において、
前記停車用自動ブレーキ力決定手段は、前記停車用自動ブレーキ力の低下を、前記検出したアクセル操作速度に比例した速度で行わせるものであることを特徴とする停車時後退防止装置。
【請求項8】
請求項1〜7のいずれか1項に記載の停車時後退防止装置において、
車両が動力源としてエンジンおよびモータ/ジェネレータを具え、これらエンジンおよび/またはモータ/ジェネレータからの動力により車輪を駆動して走行するハイブリッド車両であることを特徴とする停車時後退防止装置。
【請求項9】
請求項1〜8のいずれか1項に記載の停車時後退防止装置において、
車両が動力源としてエンジンおよびモータ/ジェネレータをタンデムに具え、
これらエンジンおよびモータ/ジェネレータ間を第1クラッチにより結合可能とし、
モータ/ジェネレータおよび駆動車輪間の車輪駆動系に第2クラッチを挿置し、
第1クラッチを解放すると共に第2クラッチを締結することによりモータ/ジェネレータからの動力のみによる電気走行モードを選択可能で、第1クラッチおよび第2クラッチをともに締結することにより、エンジンおよびモータ/ジェネレータの双方からの動力によるハイブリッド走行モードを選択可能なハイブリッド車両であり、
第2クラッチを前記断接手段として、前記伝達トルク容量制御の制御対象とすることを特徴とする停車時後退防止装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−262766(P2009−262766A)
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願番号】特願2008−115014(P2008−115014)
【出願日】平成20年4月25日(2008.4.25)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願日】平成20年4月25日(2008.4.25)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]