
停電の有無を判定する停電判定部を有するモータ駆動装置
【課題】整流器回生動作中も交流電源側の停電を検出でき、停電の誤検出のないモータ駆動装置を実現する。
【解決手段】モータ駆動装置1は、交流側から供給された交流を直流に変換し、直流側から供給された直流を交流に変換する整流器11と、整流器11が出力した直流を交流に変換してモータ2へ供給し、モータ2からの回生電力を直流に変換して整流器11へ戻す逆変換器12と、整流器11の直流出力電圧を検出する直流電圧検出部21と、整流器11の交流出力電圧を検出する交流電圧検出部22と、検出された交流電圧の周波数を算出する周波数演算部23と、120度通電型整流器11の回生動作開始時点において検出された直流電圧を基準値として記憶する記憶部24と、120度通電型整流器11の回生動作期間中、検出された直流電圧と基準値と算出された交流電圧の周波数とを用いて、整流器11の交流側の停電の有無を判定する停電判定部25とを備える。
【解決手段】モータ駆動装置1は、交流側から供給された交流を直流に変換し、直流側から供給された直流を交流に変換する整流器11と、整流器11が出力した直流を交流に変換してモータ2へ供給し、モータ2からの回生電力を直流に変換して整流器11へ戻す逆変換器12と、整流器11の直流出力電圧を検出する直流電圧検出部21と、整流器11の交流出力電圧を検出する交流電圧検出部22と、検出された交流電圧の周波数を算出する周波数演算部23と、120度通電型整流器11の回生動作開始時点において検出された直流電圧を基準値として記憶する記憶部24と、120度通電型整流器11の回生動作期間中、検出された直流電圧と基準値と算出された交流電圧の周波数とを用いて、整流器11の交流側の停電の有無を判定する停電判定部25とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、交流側から供給された交流電力を直流電力に変換して出力したのちさらにモータの駆動のための交流電力に変換してモータへ供給するモータ駆動装置に関し、特に、停電の有無を判定する停電判定部を有するモータ駆動装置に関する。
【背景技術】
【0002】
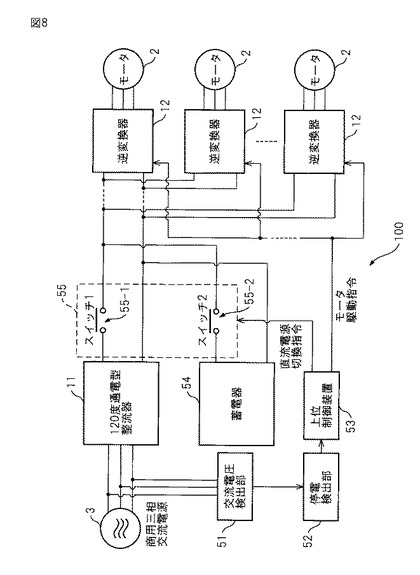
工作機械、鍛圧機械、射出成形機、産業機械、あるいは各種ロボット内のモータを駆動するモータ駆動装置においては、駆動軸ごとに設けられたモータに対し、モータの速度、トルク、もしくは回転子の位置を指令し制御する。図8は、複数のモータを駆動する一般的なモータ駆動装置の構成を示す図である。以降、異なる図面において同じ参照符号が付されたものは同じ機能を有する構成要素であることを意味するものとする。モータ駆動装置100は、商用三相交流電源3からの交流電力を直流電力に変換する120度通電型整流器11と、120度通電型整流器11から出力された直流電力をモータ2の駆動電力として供給される所望の周波数の交流電力に変換しまたはモータ2から回生される交流電力を直流電力に変換する逆変換器12と、を備え、当該逆変換器12の交流側に接続されたモータ2の速度、トルク、もしくは回転子の位置を制御する。
【0003】
逆変換器12は、複数の駆動軸に対応してそれぞれ設けられる各モータ2に個別に駆動電力を供給してモータ2を駆動制御するためにモータ2の個数と同数個設けられる。一方、120度通電型整流器11は、モータ駆動装置100のコストや占有スペースを低減する目的で、複数の逆変換器12に対して1個が設けられることが多い。
【0004】
モータ駆動装置100でモータを減速制御する際には、モータ2から回生電力が発生する。この回生電力は逆変換器12を経て120度通電型整流器11に戻される。120度通電型整流器11は、モータ減速時に発生する電力を電源に返す電源回生機能を有する比較的安価な整流器であり、交流電力を直流電力に変換する順変換動作(力行動作)のみではなく、直流電力を交流電力に変換する回生動作も実行することができるので、120度通電型整流器11は、逆変換器12から戻された回生エネルギーを商用三相交流電源3側へ戻すことができる。
【0005】
このようなモータ駆動装置100では、120度通電型整流器11の交流側において停電が発生し入力電源電圧が低下した場合、モータ2の正常な運転を継続することができなくなる。このため、120度通電型整流器11の交流側に停電検出部52を設け、停電検出部52が停電発生を検出したら、モータ駆動装置100の動作を切り換え、モータ駆動装置100、当該モータ駆動装置100が駆動するモータに接続されたツール、および、当該ツールが加工する加工対象などを保護するようにするのが一般的である。停電検出部52は、交流電圧検出部51により検出された交流電圧に基づき、停電の発生の有無を検出する。停電検出部52が停電の発生を検知しない正常時においては、上位制御装置53は、スイッチ部55のスイッチ55−1をオンするとともにスイッチ55−2をオフする。これにより商用三相交流電源3からの交流電力は、120度通電型整流器11により直流電力に変換され、逆変換器12へ供給されることになる。上位制御装置53は、各逆変換器12に対してモータ駆動指令を送信して当該逆変換器12による直流電力から交流電力への変換動作(より具体的には、当該逆変換器12内のスイッチング素子のスイッチング動作)を制御することで、当該逆変換器12から所望の交流電力が出力されるように制御する。逆変換器12から出力された交流電力を駆動電力としてモータ2は動作するので、逆変換器12から出力される交流電力を制御すれば、当該逆変換器12の交流側に接続されたモータ2の速度、トルク、もしくは回転子の位置を制御することができる。一方、停電検出部52が交流電圧検出部51により検出された交流電圧に基づき停電の発生を検知したときは、上位制御装置53は、スイッチ部55のスイッチ55−1をオフするとともにスイッチ55−2をオンする。これにより蓄電器54から直流電力が逆変換器12へ供給される。上位制御装置53は、各逆変換器12に対して、モータ駆動装置100、当該モータ駆動装置100が駆動するモータに接続されたツール、および、当該ツールが加工する加工対象を保護するためのモータ駆動指令を送信する。
【0006】
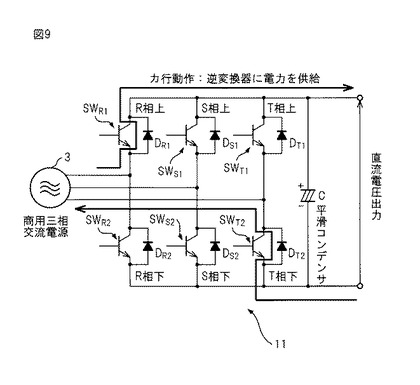
図9は、一般的なモータ駆動装置による力行動作時の120度通電型整流器における電流の流れを説明する回路図である。なお、図示の例では120度通電型整流器11に平滑コンデンサCを介して接続される逆変換器12については省略している。120度通電型整流器11は、モータに対して駆動電力を供給するときは、R相、S相およびT相の全てのスイッチSWR1、SWR2、SWS1、SWS2、SWT1およびSWT2をオフするように制御する。以下、これを「120度整流器の力行動作」と称する。120度整流器11の力行動作時において例えばある周期において商用三相交流電源3からの電流がR相に発生していた場合は、当該交流電流はR相のダイオードDR1を通って直流側に出力され、直流側からの電流は、T相のダイオードDT2を通って商用三相交流電源3へ戻る。他の時刻において発生し得る各相の電流についても同様である。
【0007】
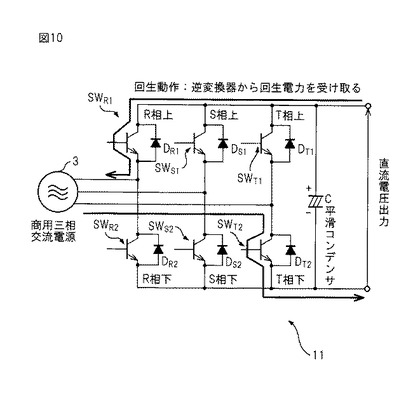
図10は、一般的なモータ駆動装置による回生動作時の120度通電型整流器における電流の流れを説明する回路図である。なお、図示の例では120度通電型整流器11に平滑コンデンサCを介して接続される逆変換器12については省略している。120度通電型整流器11は、逆変換器を介してモータ2から戻された回生電力を直流電力に変換して商用三相交流電源3へ戻すために、R相、S相およびT相の各スイッチSWR1、SWR2、SWS1、SWS2、SWT1およびSWT2を適宜オンオフ制御する。以下、これを「120度整流器の回生動作」と称する。120度整流器11の回生動作時において例えばある時刻においてR相のスイッチSWR1およびT相のスイッチSWT2がオンし、それ以外のスイッチSWR2、SWS1、SWS2およびSWTについてはオフするように制御する。これにより、ある時刻におけるモータ2からの回生電力が逆変換器を介して120度通電型整流器11へ戻されることにより生じる電流は、S相のスイッチSWR1を経由して商用三相交流電源3へ戻され、商用三相交流電源3からの電流はT相のスイッチSWT2を経由して直流側へ戻る。他の時刻において発生し得るR相およびT相の各電流についても同様である。
【0008】
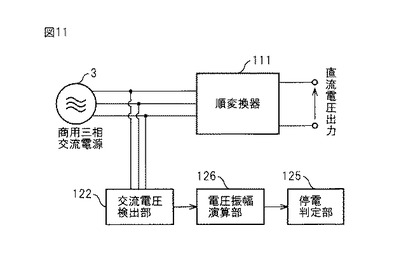
モータ駆動装置における停電判定方法として、例えば、三相交流入力電圧を二相座標上の電圧ベクトルに変換し、そのベクトルの振幅から入力電圧の振幅を計算し、その値が所定の基準電圧値を下回る状態が所定の基準時間継続したことをもって停電と判定するような方法がある(例えば、特許文献1参照。)。図11は、三相交流入力電圧の振幅に基づき停電の有無を判定する停電判定部を示す回路図である。商用三相交流電源3からの電圧を交流電圧検出部122で検出し、電圧振幅検出部126により電圧の振幅を計算する。停電判定部125は、電圧振幅検出部126により計算した電圧の振幅がその値が所定の基準電圧値を下回る状態が所定の基準時間継続したことをもって停電と判定する。
【0009】
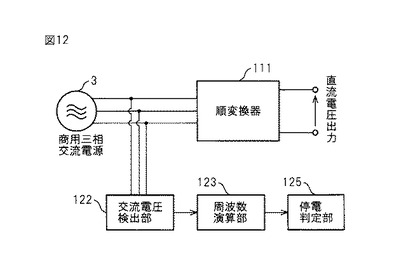
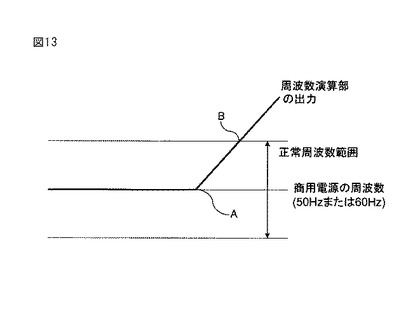
また、モータ駆動装置における別の停電判定方法として、例えば、入力電圧の周波数(電源周波数)を演算し、その演算値が所定の範囲を逸脱したことで停電と判定する方法が提案されている(例えば、特許文献2または3参照。)。図12は、三相交流入力電圧の周波数に基づき停電の有無を判定する停電判定部を示す回路図であり、図13は、三相交流入力電圧の周波数に基づき停電の有無を判定する停電判定部の原理説明図である。商用三相交流電源3からの電圧を交流電圧検出部122で検出し、周波数演算部123により周波数を計算する。停電判定部125は、周波数演算部123により計算した周波数に基づき120度通電型整流器11の交流側の停電の有無を判定する。例えば、図13に示すように、商用電源の周波数(50Hzまたは60Hz)を中心値として所定の範囲を有する正常周波数範囲を予め設定しておく、周波数演算部123が算出する周波数は、120度通電型整流器11の交流側が停電していない場合にはほぼ一定値を示すが、図13の点Aの時点で停電が発生すると、周波数演算部123が算出する周波数は変動する。図示の例では、停電の発生により周波数が徐々に増加する場合を一例として示しているが、停電の発生状況により、周波数が減少したり、あるいは振動し発散したりするようなこともある。そして点Bの時点で正常周波数範囲を逸脱すると、停電判定部125は、120度通電型整流器11の交流側に停電が発生したと判定する。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2006−14546公報
【特許文献2】特開平6−169501号公報
【特許文献3】特開平6−189411号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
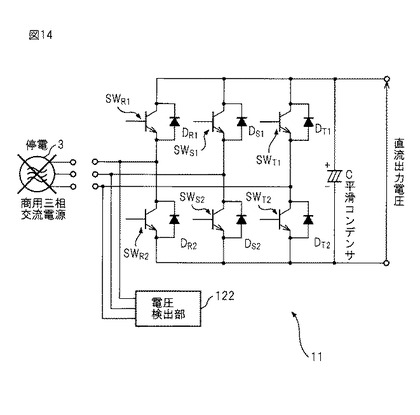
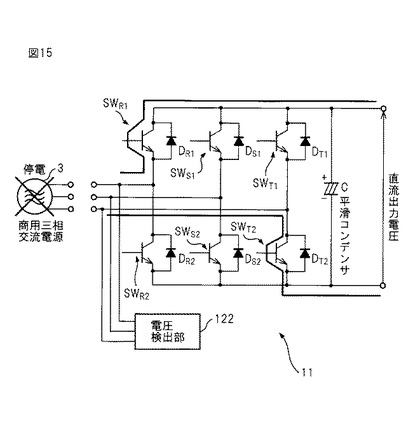
上述の特許文献1(特開2006−14546公報)に記載されたような三相交流入力電圧の振幅に基づき停電を判定する方法では、商用三相交流電源からの交流電力を直流電力へ変換する順変換器として120度通電型整流器を用いた場合、120度通電型整流器の回生動作中に交流電源側に停電が発生すると停電を検知することができない。図14および15は、120度通電型整流器を用いた場合において、電圧の振幅に基づき停電判定するときの問題点を説明する図であって、図14は120度通電型整流器の力行動作時の停電判定を示し、図15は120度通電型整流器の回生動作時の停電判定を示す。なお、図示の例では120度通電型整流器11に平滑コンデンサCを介して接続される逆変換器12については省略している。
【0012】
図14に示すように、モータ駆動装置により120度通電型整流器11が力行動作している時にモータ駆動装置の120度通電型整流器11の交流側に停電が発生すると、120度通電型整流器11内の各スイッチSWR1、SWR2、SWS1、SWS2、SWT1およびSWT2は全てオフしているので、電圧検出部122が検出する120度通電型整流器11の交流側の電圧はほぼゼロとなり、これを検知することで交流側の停電を判定することができる。
【0013】
しかしながら、図15に示すように、モータ駆動装置により120度通電型整流器11が回生動作している時にモータ駆動装置の120度通電型整流器11の交流側に停電が発生すると、オンしているスイッチを通じて直流出力電圧が、電圧検出部122に現れるため、電圧振幅が低下せず停電を検出できない。図示の例で言えば、スイッチSWR1およびSWT2がオンされているので、直流出力電圧は、スイッチSWR1およびSWT2を通じて120度通電型整流器11の交流側に現れることになる。このため、実際に停電が発生したとしても、120度通電型整流器11の交流側の電圧の振幅は低下しないので、停電の発生を検出することができない。
【0014】
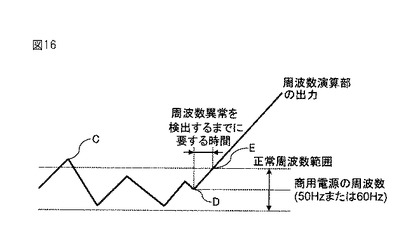
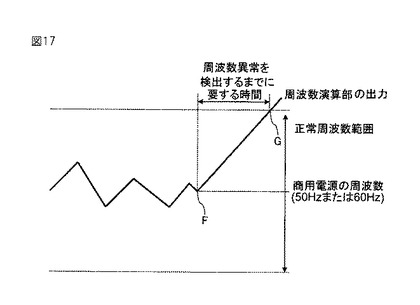
また、上述の特許文献2(特開平6−169501号公報)および特許文献3(特開平6−189411号公報)に記載されたような三相交流入力電圧の周波数に基づき停電の有無を判定する方法では、上述の三相交流入力電圧の振幅に基づき停電の有無を判定する方法とは異なり、120度通電型整流器の回生動作中においても交流電源側の停電を検出することができる。しかしながら、停電の検出を早めるために正常周波数範囲の範囲を狭めると停電の誤検出の可能性が高くなり、逆に、停電の誤検出を防ぐために正常周波数範囲の範囲を広げると停電を検出するまでに要する時間がかかり、モータ駆動装置、当該モータ駆動装置が駆動するモータに接続されたツール、および、当該ツールが加工する加工対象などを保護することができなくなる。図16および17は、120度通電型整流器を用いた場合において、電圧の周波数に基づき停電判定するときの問題点を説明する図であって、図16は正常周波数範囲を狭めた場合の停電判定を示し、図17は正常周波数範囲を広げた場合の停電判定を示す。
【0015】
図16に示すように、停電の検出を早めるために正常周波数範囲の範囲を狭めると、例えば図16の点Dの時点で停電が発生すると、周波数演算部123が算出する周波数は変動(図16の例では増加)するが、点Eの時点で正常周波数範囲を逸脱すると、停電判定部125は、120度通電型整流器11の交流側に停電が発生したと判定する。正常周波数範囲の範囲を狭めるほど、停電発生(点D)から停電検知(点E)までの、周波数異常を検出するまでに要する時間は短くなる。120度通電型整流器の回生動作中に停電が発生した場合の電源周波数の変化は、モータ駆動装置の負荷やインピーダンスに依存しており、変化が緩やかな場合もあるため、停電を早く検出するという観点で言えば、周波数変動に対する検出感度は高い方が望ましい。しかしながら、実際の商用三相交流電源3の周波数(50Hzまたは60Hz)は正常な状態であっても多少の変動をしており、停電が発生していない正常時であっても、周波数の変動のいかんによっては、図16の点Cのように正常周波数範囲を逸脱することがある。例えば、交流電源側が分散型電源による小規模な電源等である場合には、周波数変動は大きく、停電の誤検出の発生の可能性が高くなる。
【0016】
一方、図17に示すように、停電の誤検出を防ぐために正常周波数範囲の範囲を広げると、例えば点Fの時点の停電発生後、周波数演算部123が算出する周波数は変動(図17の例では増加)するが、正常周波数範囲の逸脱により120度通電型整流器11の交流側に停電が発生したと停電判定部125が判定する点Gに到達するまでの時間が長くなってしまう。このため、モータ駆動装置、当該モータ駆動装置が駆動するモータに接続されたツール、および、当該ツールが加工する加工対象などを保護するための動作が間に合わなくなる可能性が高くなる。
【0017】
したがって本発明の目的は、上記問題に鑑み、120度通電型整流器の回生動作中であっても交流電源側の停電を高速に検出して装置を保護することができるとともに、停電の誤検出のないモータ駆動装置を提供することにある。
【課題を解決するための手段】
【0018】
上記目的を実現するために、本発明においては、力行動作時には交流側から供給された交流電力を直流電力に変換して出力し、回生動作時には直流側から供給された直流電力を交流電力に変換して出力する120度通電型整流器と、力行動作時には120度通電型整流器が出力した直流電力をモータの駆動のための交流電力に変換してモータへ供給し、回生動作時にはモータからの回生交流電力を直流電力に変換して120度通電型整流器へ戻す逆変換器と、120度通電型整流器の直流出力側の直流電圧を検出する直流電圧検出部と、120度通電型整流器の交流出力側の交流電圧を検出する交流電圧検出部と、交流電圧検出部が検出した交流電圧の周波数を算出する周波数演算部と、120度通電型整流器の回生動作開始時点において直流電圧検出部が検出した直流電圧を基準値として記憶する記憶部と、120度通電型整流器の回生動作期間中、直流電圧検出部が検出した直流電圧と、記憶部に記憶された基準値と、周波数演算部が算出した交流電圧の周波数と、を用いて、120度通電型整流器の交流側の停電の有無を判定する停電判定部と、を備える。
【0019】
本発明の第1の態様によれば、上記停電判定部は、120度通電型整流器の回生動作期間中、直流電圧検出部が検出した直流電圧が基準値よりも大きいか否かを判定する電圧判定部と、120度通電型整流器の回生動作期間中、直流電圧検出部が検出した直流電圧が基準値よりも大きいと電圧判定部が判定した場合、周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する周波数異常検知部と、を有し、周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知した場合、120度通電型整流器の交流側が停電したと判定する。
【0020】
本発明の第2の態様によれば、モータ駆動装置は、交流電圧検出部が検出した交流電圧の振幅を算出する振幅演算部をさらに備え、上記停電判定部は、120度通電型整流器の回生動作期間中、直流電圧検出部が検出した直流電圧が基準値よりも大きいか否かを判定する電圧判定部と、120度通電型整流器の回生動作期間中、直流電圧検出部が検出した直流電圧が基準値よりも大きいと電圧判定部が判定した場合、周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する周波数異常検知部と、周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知した場合、120度通電型整流器による直流電力から交流電力への変換動作を停止する回生停止部と、振幅演算部が算出した交流電圧の振幅が所定の値以下になったか否かを検知する振幅判定部と、を有し、回生停止部により120度通電型整流器の変換動作が停止した後に、振幅演算部が算出した交流電圧の振幅が所定の値以下になったことを振幅判定部が検知した場合、120度通電型整流器の交流側が停電したと判定する。
【0021】
ここで、上記正常周波数範囲は、120度通電型整流器の回生動作開始時点に周波数演算部が算出した周波数を中心値として規定される範囲としてもよい。
【発明の効果】
【0022】
本発明によれば、交流側から供給された交流電力を120度通電型整流器によって直流電力に変換して出力したのちさらに逆変換器によってモータの駆動のための交流電力に変換してモータへ供給するモータ駆動装置において、120度通電型整流器の直流側の直流電圧と、120度通電型整流器の回生動作開始時点の120度通電型整流器の直流側の直流電圧である基準値と、120度通電型整流器の交流側の交流電圧の周波数と、を用いて、120度通電型整流器の交流側の停電の有無を判定することで、120度通電型整流器の回生動作期間中であっても交流電源側の停電を検出して装置を保護することができ、また、正常時において停電を誤検出することもない。
【0023】
本発明の第1の態様によれば、120度通電型整流器の回生動作期間中、120度通電型整流器の直流側の直流電圧が基準値よりも大きくなおかつ120度通電型整流器の交流側の交流電圧の周波数が正常周波数範囲外にあるときに、120度通電型整流器の交流側が停電したと判定するので、停電判定をより正確に行うことができるとともに、正常時において停電を誤検出することもない。
【0024】
本発明の第2の態様によれば、120度通電型整流器の回生動作期間中、120度通電型整流器の直流側の直流電圧が基準値よりも大きくなおかつ120度通電型整流器の交流側の交流電圧の周波数が正常周波数範囲外にあるときに120度通電型整流器による直流電力から交流電力への変換動作を停止しこのときの120度通電型整流器の交流側の交流電圧の振幅が所定の値以下になったときに120度通電型整流器の交流側が停電したと判定するので、停電判定をより正確に行うことができるとともに、正常時において停電を誤検出することもない。
【図面の簡単な説明】
【0025】
【図1】本発明の第1の実施例によるモータ駆動装置を示す回路図である。
【図2】本発明の第1の実施例における停電判定部の動作を説明する図である。
【図3】本発明の第2の実施例によるモータ駆動装置を示す回路図である。
【図4】本発明の第2の実施例における停電判定部の動作を説明する図である。
【図5】本発明の第1の実施例の変形例によるモータ駆動装置を示す回路図である。
【図6】本発明の第1および第2の実施例によるモータ駆動装置1における動作判定部の構成を示す回路図である。
【図7】120度通電型整流器の力行動作と回生動作との切換えを説明する図である。
【図8】複数のモータを駆動する一般的なモータ駆動装置の構成を示す図である。
【図9】一般的なモータ駆動装置による力行動作時の120度通電型整流器における電流の流れを説明する回路図である。
【図10】一般的なモータ駆動装置による回生動作時の120度通電型整流器における電流の流れを説明する回路図である。
【図11】三相交流入力電圧の振幅に基づき停電の有無を判定する停電判定部を示す回路図である。
【図12】三相交流入力電圧の周波数に基づき停電の有無を判定する停電判定部を示す回路図である。
【図13】三相交流入力電圧の周波数に基づき停電の有無を判定する停電判定部の原理説明図である。
【図14】120度通電型整流器を用いた場合において、電圧の振幅に基づき停電判定するときの問題点を説明する図であって、120度通電型整流器の力行動作時の停電判定を示す図である。
【図15】120度通電型整流器を用いた場合において、電圧の振幅に基づき停電判定するときの問題点を説明する図であって、120度通電型整流器の回生動作時の停電判定を示す図である。
【図16】120度通電型整流器を用いた場合において、電圧の周波数に基づき停電判定するときの問題点を説明する図であって、正常周波数範囲を狭めた場合の停電判定を示す図である。
【図17】120度通電型整流器を用いた場合において、電圧の周波数に基づき停電判定するときの問題点を説明する図であって、正常周波数範囲を広げた場合の停電判定を示す図である。
【発明を実施するための形態】
【0026】
以下に説明する実施例では、複数個のモータを駆動制御するモータ制御装置について説明するが、駆動制御するモータの個数は、本発明を特に限定するものではない。
【0027】
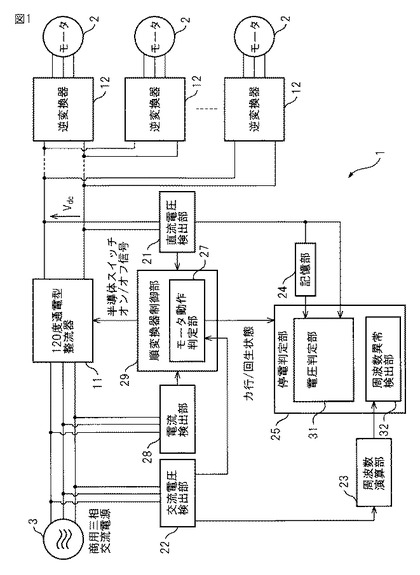
図1は、本発明の第1の実施例によるモータ駆動装置を示す回路図である。本発明の第1の実施例によるモータ2を駆動するためのモータ駆動装置1は、120度通電型整流器11と、逆変換器12と、直流電圧検出部21と、交流電圧検出部と22と、周波数演算部23と、記憶部24と、停電判定部25とを備える。
【0028】
120度通電型整流器11は、力行動作時には商用三相交流電源3より供給された交流電力を直流電力に変換して出力し、回生動作時にはモータ2の回生により逆変換器12から供給された直流電力を交流電力に変換して出力する、交直双方向に変換可能である電力変換器である。
【0029】
逆変換器12は、120度通電型整流器11に直流リンクを介して接続されており、力行動作時には120度通電型整流器11が出力した直流電力をモータ2の駆動のための交流電力に変換してモータ2へ供給し、回生動作時にはモータ2からの回生交流電力を直流電力に変換して120度通電型整流器11へ戻す。
【0030】
直流電圧検出部21は、120度通電型整流器11の直流出力側の直流電圧を検出する。一方、交流電圧検出部22は、120度通電型整流器11の交流出力側の交流電圧を検出する。
【0031】
周波数演算部23は、交流電圧検出部22が検出した交流電圧の周波数を算出する。
【0032】
記憶部24は、120度通電型整流器11の回生動作開始時点において直流電圧検出部21が検出した直流電圧を基準値として記憶する。
【0033】
モータ2による回生電力発生後少し間をおいて120度通電型整流器11の回生動作を開始する場合、120度通電型整流器11の直流側の直流電圧は120度通電型整流器11の回生動作開始直後の直流電圧よりも下がるはずであるが、120度通電型整流器11の回生動作開始後しばらくしても直流出力電圧が120度通電型整流器11の回生開始時の直流電圧よりも大きいということは、120度通電型整流器11の直流側から交流側へエネルギーが流れていないということであり、すなわち120度通電型整流器11の交流側において停電が発生している可能性が高い。そこで本発明では、停電判定部25は、120度通電型整流器11の回生動作期間中、直流電圧検出部21が検出した直流電圧と、記憶部24に記憶された基準値と、周波数演算部23が算出した交流電圧の周波数と、を用いて、120度通電型整流器11の交流側の停電の有無を判定する。停電判定部25は、例えばDSPやFPGAなどの演算処理プロセッサからなり、その動作はソフトウェアプログラムにより規定される。
【0034】
本発明の第1の実施例における停電判定部25の構成および動作についてより詳細に説明すると下記の通りである。本発明の第1の実施例における停電判定部25は、第1の条件として、120度通電型整流器11の回生動作期間中に直流電圧検出部21が検出した直流電圧が、120度通電型整流器11の回生動作開始時点において直流電圧検出部21が検出した直流電圧である基準値より大きいこと、第2の条件として、周波数演算部23が算出した交流電圧の周波数が、正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知したこと、の2つ同時に満たすときに、120度通電型整流器11の交流側が停電したと判断するようにする。これにより、正常周波数範囲の幅を狭めたとしても、上記第1の条件および第2の条件の両方を満たさない限りは停電と判断されないので、正常周波数範囲の幅を狭めることで停電の検出時間を早めることが可能となる。また、例えば120度通電型整流器11の力行動作時に周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知したとしても、上記第1の条件を満たさないので、停電の誤検出を防ぐことができる。
【0035】
したがって、本発明の第1の実施例における停電判定部25は、120度通電型整流器11の回生動作期間中、直流電圧検出部21が検出した直流電圧が、120度通電型整流器11の回生動作開始時点において直流電圧検出部21が検出した直流電圧である基準値よりも大きいか否かを判定する電圧判定部31と、120度通電型整流器11の回生動作期間中、直流電圧検出部21が検出した直流電圧が基準値よりも大きいと電圧判定部31が判定した場合、周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する周波数異常検知部32と、を有するように構成する。そして、停電判定部25は、周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知した場合、120度通電型整流器11の交流側が停電したと判定する。なお、本発明の第1の実施例によるモータ駆動装置1は、120度通電型整流器11の回生動作期間中における停電の発生の有無を、120度通電型整流器11の回生動作開始時点において直流電圧検出部21が検出した直流電圧である基準値を用いて判定するが、120度通電型整流器11の回生動作が一旦終了して力行動作に移行した後、再度、120度通電型整流器11の回生動作が開始したときには、モータ駆動装置1は、当該新しい回生動作開始時点において直流電圧検出部21が検出した直流電圧を新たなる基準値として記憶部24に記憶し、当該新しい回生動作期間中の停電の発生の有無を、当該新たなる基準値を用いて判定する。
【0036】
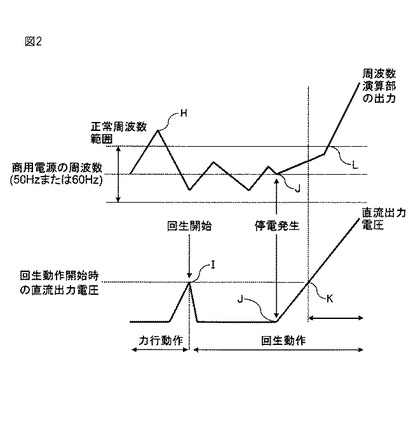
図2は、本発明の第1の実施例における停電判定部の動作を説明する図である。一例として、モータ駆動装置1の制御により、点Iの時点で120度通電型整流器11が力行動作から回生動作に切り替わり、点Jの時点で120度通電型整流器11の交流側で停電が発生した場合を考える。
【0037】
図2に示すように、120度通電型整流器11の交流側で停電が無い状態すなわち正常時において120度通電型整流器11の力行動作が行われている場合は120度通電型整流器11の直流側の直流電圧は一定値である。このときモータ2による回生電力が発生すると、当該回生電力のエネルギーが逆変換器12を介して120度通電型整流器11の直流側に流れ込むので、直流電圧検出部21が検出する直流電圧は増加し始める。120度通電型整流器11の直流側の直流電圧が所定の値に達したとき、モータ駆動装置1の制御により、120度通電型整流器11が力行動作から回生動作に切り替わり(図2の点I)、当該回生電力のエネルギーは、120度通電型整流器11の直流側に流れ始めるので、直流電圧検出部21が検出する直流電圧は減少し始める。ここで、図2の点Jの時点で停電が発生すると、直流電圧検出部21が検出する直流電圧は一転して上昇を始め、周波数演算部23が算出する周波数が変動し始める。図示の例では、周波数の変動の一例として周波数演算部23が算出する周波数が徐々に増加する場合を示している。記憶部24には、120度通電型整流器11の回生開始時点(図2の点I)において直流電圧検出部21が検出した直流電圧が基準値として記憶されているが、停電判定部25内の電圧判定部31は、直流電圧検出部21が検出した直流電圧が、記憶部24に記憶された基準値よりも大きいか否かを判定する。図2の点Kの時点で、直流電圧検出部21が検出した直流電圧が、記憶部24に記憶された基準値よりも大きいと判定すると、停電検出部25の周波数異常検出部32は、周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する。図2の点Lの時点で周波数演算部が算出した交流電圧の周波数が正常周波数範囲外となるが、周波数異常検出部が周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知した場合、停電判定部25は、120度通電型整流器11の交流側が停電したと判定する。つまり、本発明の第1の実施例における停電判定部25は、直流電圧検出部21が検出した直流電圧が記憶部24に記憶された基準値よりも大きいと判定され(図2の点K)なおかつ周波数異常検出部32が周波数異常を検出したときに、初めて停電が発生したと判定するので、正常周波数範囲の範囲を狭めたとしても、停電の検出を早めることができるとともに正常時に停電を誤検出することもなくなる。120度通電型整流器11が力行動作時にある図2の点Hの時点で、周波数演算部23により算出された交流電圧の周波数が何らかの原因により予め設定された正常周波数範囲を超えてしまったとしても、120度通電型整流器11の回生動作期間中ではないことから、停電判定部25は停電と誤判断することはない。
【0038】
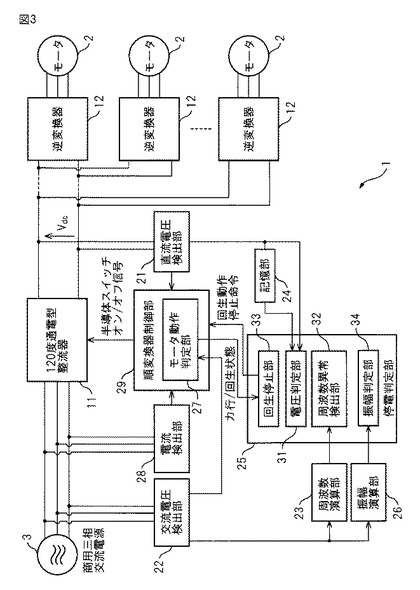
続いて、本発明の第2の実施例について説明する。図3は、本発明の第2の実施例によるモータ駆動装置を示す回路図である。本発明の第2の実施例によるモータ駆動装置1は、120度通電型整流器11と、逆変換器12と、直流電圧検出部21と、交流電圧検出部と22と、周波数演算部23と、記憶部24と、判定部25と、振幅演算部26を備える。本発明の第2の実施例における120度通電型整流器11、逆変換器12、直流電圧検出部21、交流電圧検出部22、周波数演算部23、および記憶部24は、上述の第1の実施例と同様であるので、同一の回路構成要素には同一符号を付して当該回路構成要素についての詳細な説明は省略する。
【0039】
停電判定部25は、120度通電型整流器11の回生動作期間中、直流電圧検出部21が検出した直流電圧と、記憶部24に記憶された基準値と、周波数演算部23が算出した交流電圧の周波数と、を用いて、120度通電型整流器11の交流側の停電の有無を判定する。停電判定部25は、例えばDSPやFPGAなどの演算処理プロセッサからなり、その動作はソフトウェアプログラムにより規定される。
【0040】
本発明の第2の実施例における停電判定部25の構成および動作についてより詳細に説明すると下記の通りである。本発明の第2の実施例における停電判定部25は、第1の条件として、120度通電型整流器11の回生動作期間中に直流電圧検出部21が検出した直流電圧が、120度通電型整流器11の回生動作開始時点において直流電圧検出部21が検出した直流電圧である基準値より大きいこと、第2の条件として、周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知したこと、の2つ同時に満たすときに、120度通電型整流器11による直流電力から交流電力への変換動作(すなわち回生動作)を停止する。120度通電型整流器11による回生動作が停止すると、120度通電型整流器11内の半導体スイッチが全てオフされるので、交流電圧検出部22が検出する120度通電型整流器11の交流側の交流電圧は商用三相交流電源3の定格電圧よりも低下する。したがって、交流電圧検出部22が検出する交流電圧の振幅が所定の値以下となったとき、停電したと判断するようにする。ここで、上記「所定の値」は、モータ2の運用状況などに応じてユーザが任意に設定してもよく、例えば商用三相交流電源3の定格電圧の数%〜数十%減の値に設定することが考えられる。またあるいは、上記「所定の値」を交流電圧検出部22の検出限界に応じて設定してもよい。
【0041】
このように、交流電圧検出部22が検出する交流電圧の振幅が所定の値以下となったとき、停電したと判断するようにすることで、仮に正常周波数範囲の幅を狭く設定したとしても、上記第1の条件および第2の条件の両方を満たさない限りは停電と判断されないので、正常周波数範囲の幅を狭めて停電の検出時間を早めることが可能となる。また、例えば120度通電型整流器11の力行動作時に周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知したとしても、上記第1の条件を満たさないので、停電の誤検出を防ぐことができる。
【0042】
したがって、本発明の第2の実施例における停電判定部25は、120度通電型整流器11の回生動作期間中、直流電圧検出部21が検出した直流電圧が基準値よりも大きいか否かを判定する電圧判定部31と、120度通電型整流器11の回生動作期間中、直流電圧検出部21が検出した直流電圧が基準値よりも大きいと電圧判定部31が判定した場合、周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する周波数異常検知部32と、120度通電型整流器11の回生動作期間中、周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部32が所定の期間継続して検知した場合、120度通電型整流器11による直流電力から交流電力への変換動作を停止する回生停止部33と、交流電圧検出部22が検出した交流電圧の振幅を算出する振幅演算部26と、振幅演算部26が算出した交流電圧の振幅が所定の値以下になったか否かを検知する振幅判定部34と、を有するように構成する。そして、停電判定部25は、回生停止部33により120度通電型整流器11の変換動作が停止した後に、振幅判定部34が振幅演算部26が算出した交流電圧の振幅が所定の値以下になったことを検知した場合、120度通電型整流器11の交流側が停電したと判定する。本発明の第2の実施例によるモータ駆動装置1においては、120度通電型整流器11の回生動作が一旦終了して力行動作に移行した後、再度、120度通電型整流器11の回生動作が開始したときには、モータ駆動装置1は、当該新しい回生動作開始時点において直流電圧検出部21が検出した直流電圧を新たなる基準値として記憶部24に記憶し、当該新しい回生動作期間中の停電の発生の有無を、当該新たなる基準値を用いて判定する。
【0043】
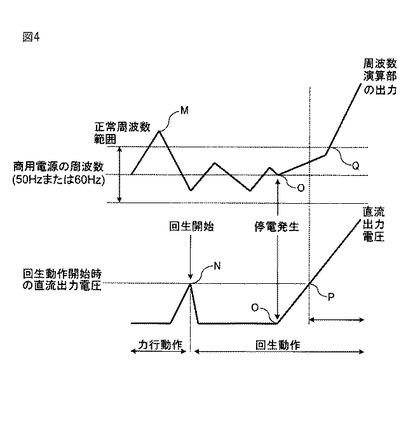
図4は、本発明の第2の実施例における停電判定部の動作を説明する図である。一例として、モータ駆動装置1の制御により、点Nの時点で120度通電型整流器11が力行動作から回生動作に切り替わり、点Oの時点で120度通電型整流器11の交流側で停電が発生した場合を考える。
【0044】
図4に示すように、120度通電型整流器11の交流側で停電が無い状態すなわち正常時において120度通電型整流器11の力行動作が行われている場合は120度通電型整流器11の直流側の直流電圧は一定値である。このときモータ2による回生電力が発生すると、当該回生電力のエネルギーが逆変換器12を介して120度通電型整流器11の直流側に流れ込むので、直流電圧検出部21が検出する直流電圧は増加し始める。120度通電型整流器11の直流側の直流電圧が所定の値に達したとき、モータ駆動装置1の制御により、120度通電型整流器11が力行動作から回生動作に切り替わり(図4の点N)、当該回生電力のエネルギーは、120度通電型整流器11の直流側に流れ始めるので、直流電圧検出部21が検出する直流電圧は減少し始める。ここで、図4の点Oの時点で停電が発生すると、直流電圧検出部21が検出した直流電圧は一転して上昇を始め、周波数演算部23が算出する周波数も変動し始める。図示の例では、周波数の変動の一例として周波数演算部23が算出する周波数が徐々に増加する場合を示している。記憶部24には、120度通電型整流器11の回生開始時点(点N)において直流電圧検出部21が検出した直流電圧が基準値として記憶されているが、停電判定部25内の電圧判定部31は、直流電圧検出部21が検出した直流電圧が、記憶部24に記憶された基準値よりも大きいか否かを判定する。図4の点Pの時点で、直流電圧検出部21が検出した直流電圧が、記憶部24に記憶された基準値よりも大きいと判定すると、停電検出部25の周波数異常検出部32は、120度通電型整流器11の回生動作期間中、周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する。図4の点Qの時点で周波数演算部が算出した交流電圧の周波数が正常周波数範囲外となるが、周波数異常検出部が周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知した場合、回生停止部33は、120度通電型整流器11による直流電力から交流電力への変換動作を停止する。その後、120度通電型整流器11の交流側の電圧の振幅が所定の値以下になったとこと振幅判定部34が検知したとき、120度通電型整流器11の交流側が停電したと判定する。つまり、本発明の第2の実施例における停電判定部25においても、第1の実施例の場合同様、、120度通電型整流器11の回生動作期間中は、直流電圧検出部21が検出した直流電圧が記憶部24に記憶された基準値よりも大きいと判定されなおかつ周波数異常検出部32が周波数異常を検出したときに、初めて停電が発生したと判定するので、正常周波数範囲の範囲を狭めたとしても、停電の検出を早めることができるとともに正常時に停電を誤検出することもなくなる。また、120度通電型整流器11が力行動作時にある図4の点Mの時点で、周波数演算部23により算出された交流電圧の周波数が何らかの原因により予め設定された正常周波数範囲を超えてしまったとしても、120度通電型整流器11の回生動作期間中ではないことから、停電判定部25は停電と誤判断することはない。
【0045】
なお、上述の本発明の第1および第2の実施例において、上記正常周波数範囲は、商用周波数(50Hzまたは60Hz)を中心値として規定される範囲としたが、商用周波数が変動することを考慮して、120度通電型整流器11の回生動作開始時点に周波数演算部23が算出した周波数を中心値として規定される範囲としてもよい。
【0046】
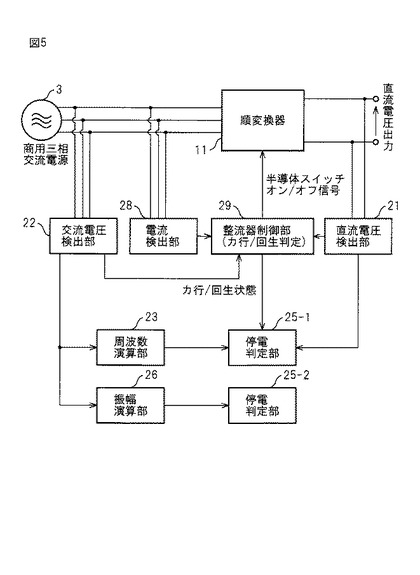
上述の本発明の第1および第2の実施例の変形例として、上述の停電判定部に加え、120度通電型整流器の交流側の交流電圧の振幅を演算し、その値が所定の値よりも小さい場合に停電と判定するもう一つの停電判定部を設けて、上述の停電判定部との論理和で停電の有無を判定するようにしてもよい。これについて本発明の第1の実施例の場合を例にとり説明すると次の通りである。図5は、本発明の第1の実施例の変形例によるモータ駆動装置を示す回路図である。図1を参照して説明した本発明の第1の実施例における停電判定部25を、図5では参照符号25−1で示す。さらなる停電判定部25−2は、振幅演算部26により算出された120度通電型整流器11の交流側の電圧の振幅が、所定の値よりも小さい場合に停電と判定する。停電判定部25−1および停電判定部25−2のうちの少なくとも1つが停電と判定したとき、最終的な判断として、120度通電型整流器11の交流側が停電していると判定する。本発明の第2の実施例についても同様の変形が可能である。
【0047】
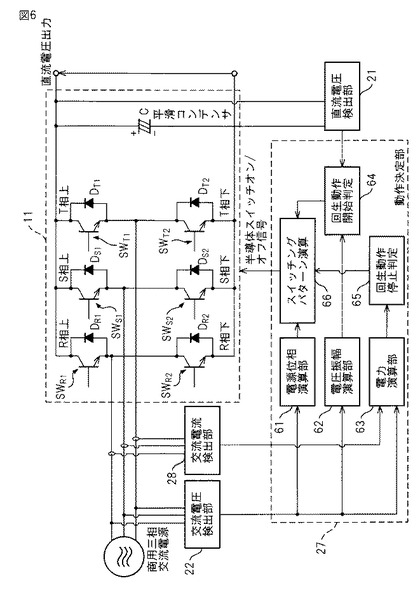
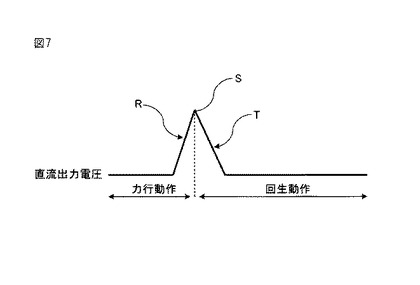
なお、本発明の第1および第2の実施例によるモータ駆動装置1は、上述のように120度通電型整流器11が力行動作状態にあるか回生動作状態にあるかにより停電判定の処理内容が決まるため、120度通電型整流器11を力行動作させるか回生動作させるかを決定する動作決定部27を備える。図6は、本発明の第1および第2の実施例によるモータ駆動装置1における動作判定部の構成を示すブロック図である。図6では、説明を簡明にするために主として動作決定部27の構成を示している。また、図7は、120度通電型整流器の力行動作と回生動作との切換えを説明する図である。
【0048】
120度通電型整流器11内のスイッチが全てオフの状態で力行動作時にある場合おいて、モータ2から回生電力が発生し逆変換器12から当該回生電力が供給され始めると、平滑コンデンサCに電荷が蓄積され、120度通電型整流器11の直流側の直流電圧が上昇していく(図7の点R)。そこで、動作決定部27内の回生動作開始判定ブロック64は、直流電圧検出部21により検出された直流電圧が所定の値を超えた場合に、または、直流電圧検出部21により検出された直流電圧と、電圧振幅演算ブロック62により算出された120度通電型整流器11の交流側の相間電圧の振幅との電位差が所定の値を超えた場合に、120度通電型整流器11を力行動作から回生動作に切り替えることを決定する(図7の点S)。この決定に基づき、スイッチングパターンパターン演算ブロック66は、120度通電型整流器11に対し、直流電力から交流電力への変換動作(すなわち回生動作)をするような半導体スイッチに対するオン/オフ信号を出力し、この信号に基づき、120度通電型整流器11は、直流電力から交流電力への変換動作(すなわち回生動作)を行う。このとき、120度通電型整流器11の交流側に停電が無ければ、平滑コンデンサCに蓄積された回生エネルギーは120度通電型整流器11を経由して商用三相交流電源3側に戻されることになるので、直流電圧検出部21により検出された直流電圧は低下し(図7の点T)、その後、ほぼ一定値となる。逆変換器12からの回生電力の供給が終了すると、電力演算部63により演算される120度通電型整流器11の交流側の電力が少なくともゼロ以上の値(すなわち負ではない値)になる。この120度通電型整流器11の交流側の電力が所定の閾値を超えたとき、回生動作停止判定ブロック65は回生動作停止を決定してスイッチングパターン演算ブロック66に対してその旨を通知する。スイッチングパターン演算ブロック66は、回生動作開始判定ブロック64、回生動作停止判定ブロック65および電圧位相演算部61からの指令に基づき、120度通電型整流器11内の半導体スイッチに対するオンオフ信号を作成する。
【0049】
なお、上述の周波数演算部23、停電判定部25、25−1および25−2、振幅演算部26、動作決定部27、電圧判定部31、周波数異常検出部32、回生停止部33、振幅判定部34などは、例えばDSPやFPGAなどの演算処理プロセッサからなり、その動作はソフトウェアプログラムにより規定される。
【産業上の利用可能性】
【0050】
本発明は、工作機械、鍛圧機械、射出成形機、産業機械、あるいは各種ロボット内のモータを駆動するモータ駆動装置として、入力された交流を直流に変換する120度通電型整流器と、直流変換部から出力された直流を各モータの駆動電力としてそれぞれ供給される交流に変換する逆変換器と、を有するものにおいて、120度通電型整流器の交流側の停電の発生の有無の判定に適用することができる。
【符号の説明】
【0051】
1 モータ駆動装置
2 モータ
3 商用三相交流電源
11 120度通電型整流器
12 逆変換器
21 直流電圧検出部
22 交流電圧検出部
23 周波数演算部
24 記憶部
25、25−1、25−2 停電判定部
26 振幅演算部
27 動作決定部
31 電圧判定部
32 周波数異常検出部
33 回生停止部
34 振幅判定部
【技術分野】
【0001】
本発明は、交流側から供給された交流電力を直流電力に変換して出力したのちさらにモータの駆動のための交流電力に変換してモータへ供給するモータ駆動装置に関し、特に、停電の有無を判定する停電判定部を有するモータ駆動装置に関する。
【背景技術】
【0002】
工作機械、鍛圧機械、射出成形機、産業機械、あるいは各種ロボット内のモータを駆動するモータ駆動装置においては、駆動軸ごとに設けられたモータに対し、モータの速度、トルク、もしくは回転子の位置を指令し制御する。図8は、複数のモータを駆動する一般的なモータ駆動装置の構成を示す図である。以降、異なる図面において同じ参照符号が付されたものは同じ機能を有する構成要素であることを意味するものとする。モータ駆動装置100は、商用三相交流電源3からの交流電力を直流電力に変換する120度通電型整流器11と、120度通電型整流器11から出力された直流電力をモータ2の駆動電力として供給される所望の周波数の交流電力に変換しまたはモータ2から回生される交流電力を直流電力に変換する逆変換器12と、を備え、当該逆変換器12の交流側に接続されたモータ2の速度、トルク、もしくは回転子の位置を制御する。
【0003】
逆変換器12は、複数の駆動軸に対応してそれぞれ設けられる各モータ2に個別に駆動電力を供給してモータ2を駆動制御するためにモータ2の個数と同数個設けられる。一方、120度通電型整流器11は、モータ駆動装置100のコストや占有スペースを低減する目的で、複数の逆変換器12に対して1個が設けられることが多い。
【0004】
モータ駆動装置100でモータを減速制御する際には、モータ2から回生電力が発生する。この回生電力は逆変換器12を経て120度通電型整流器11に戻される。120度通電型整流器11は、モータ減速時に発生する電力を電源に返す電源回生機能を有する比較的安価な整流器であり、交流電力を直流電力に変換する順変換動作(力行動作)のみではなく、直流電力を交流電力に変換する回生動作も実行することができるので、120度通電型整流器11は、逆変換器12から戻された回生エネルギーを商用三相交流電源3側へ戻すことができる。
【0005】
このようなモータ駆動装置100では、120度通電型整流器11の交流側において停電が発生し入力電源電圧が低下した場合、モータ2の正常な運転を継続することができなくなる。このため、120度通電型整流器11の交流側に停電検出部52を設け、停電検出部52が停電発生を検出したら、モータ駆動装置100の動作を切り換え、モータ駆動装置100、当該モータ駆動装置100が駆動するモータに接続されたツール、および、当該ツールが加工する加工対象などを保護するようにするのが一般的である。停電検出部52は、交流電圧検出部51により検出された交流電圧に基づき、停電の発生の有無を検出する。停電検出部52が停電の発生を検知しない正常時においては、上位制御装置53は、スイッチ部55のスイッチ55−1をオンするとともにスイッチ55−2をオフする。これにより商用三相交流電源3からの交流電力は、120度通電型整流器11により直流電力に変換され、逆変換器12へ供給されることになる。上位制御装置53は、各逆変換器12に対してモータ駆動指令を送信して当該逆変換器12による直流電力から交流電力への変換動作(より具体的には、当該逆変換器12内のスイッチング素子のスイッチング動作)を制御することで、当該逆変換器12から所望の交流電力が出力されるように制御する。逆変換器12から出力された交流電力を駆動電力としてモータ2は動作するので、逆変換器12から出力される交流電力を制御すれば、当該逆変換器12の交流側に接続されたモータ2の速度、トルク、もしくは回転子の位置を制御することができる。一方、停電検出部52が交流電圧検出部51により検出された交流電圧に基づき停電の発生を検知したときは、上位制御装置53は、スイッチ部55のスイッチ55−1をオフするとともにスイッチ55−2をオンする。これにより蓄電器54から直流電力が逆変換器12へ供給される。上位制御装置53は、各逆変換器12に対して、モータ駆動装置100、当該モータ駆動装置100が駆動するモータに接続されたツール、および、当該ツールが加工する加工対象を保護するためのモータ駆動指令を送信する。
【0006】
図9は、一般的なモータ駆動装置による力行動作時の120度通電型整流器における電流の流れを説明する回路図である。なお、図示の例では120度通電型整流器11に平滑コンデンサCを介して接続される逆変換器12については省略している。120度通電型整流器11は、モータに対して駆動電力を供給するときは、R相、S相およびT相の全てのスイッチSWR1、SWR2、SWS1、SWS2、SWT1およびSWT2をオフするように制御する。以下、これを「120度整流器の力行動作」と称する。120度整流器11の力行動作時において例えばある周期において商用三相交流電源3からの電流がR相に発生していた場合は、当該交流電流はR相のダイオードDR1を通って直流側に出力され、直流側からの電流は、T相のダイオードDT2を通って商用三相交流電源3へ戻る。他の時刻において発生し得る各相の電流についても同様である。
【0007】
図10は、一般的なモータ駆動装置による回生動作時の120度通電型整流器における電流の流れを説明する回路図である。なお、図示の例では120度通電型整流器11に平滑コンデンサCを介して接続される逆変換器12については省略している。120度通電型整流器11は、逆変換器を介してモータ2から戻された回生電力を直流電力に変換して商用三相交流電源3へ戻すために、R相、S相およびT相の各スイッチSWR1、SWR2、SWS1、SWS2、SWT1およびSWT2を適宜オンオフ制御する。以下、これを「120度整流器の回生動作」と称する。120度整流器11の回生動作時において例えばある時刻においてR相のスイッチSWR1およびT相のスイッチSWT2がオンし、それ以外のスイッチSWR2、SWS1、SWS2およびSWTについてはオフするように制御する。これにより、ある時刻におけるモータ2からの回生電力が逆変換器を介して120度通電型整流器11へ戻されることにより生じる電流は、S相のスイッチSWR1を経由して商用三相交流電源3へ戻され、商用三相交流電源3からの電流はT相のスイッチSWT2を経由して直流側へ戻る。他の時刻において発生し得るR相およびT相の各電流についても同様である。
【0008】
モータ駆動装置における停電判定方法として、例えば、三相交流入力電圧を二相座標上の電圧ベクトルに変換し、そのベクトルの振幅から入力電圧の振幅を計算し、その値が所定の基準電圧値を下回る状態が所定の基準時間継続したことをもって停電と判定するような方法がある(例えば、特許文献1参照。)。図11は、三相交流入力電圧の振幅に基づき停電の有無を判定する停電判定部を示す回路図である。商用三相交流電源3からの電圧を交流電圧検出部122で検出し、電圧振幅検出部126により電圧の振幅を計算する。停電判定部125は、電圧振幅検出部126により計算した電圧の振幅がその値が所定の基準電圧値を下回る状態が所定の基準時間継続したことをもって停電と判定する。
【0009】
また、モータ駆動装置における別の停電判定方法として、例えば、入力電圧の周波数(電源周波数)を演算し、その演算値が所定の範囲を逸脱したことで停電と判定する方法が提案されている(例えば、特許文献2または3参照。)。図12は、三相交流入力電圧の周波数に基づき停電の有無を判定する停電判定部を示す回路図であり、図13は、三相交流入力電圧の周波数に基づき停電の有無を判定する停電判定部の原理説明図である。商用三相交流電源3からの電圧を交流電圧検出部122で検出し、周波数演算部123により周波数を計算する。停電判定部125は、周波数演算部123により計算した周波数に基づき120度通電型整流器11の交流側の停電の有無を判定する。例えば、図13に示すように、商用電源の周波数(50Hzまたは60Hz)を中心値として所定の範囲を有する正常周波数範囲を予め設定しておく、周波数演算部123が算出する周波数は、120度通電型整流器11の交流側が停電していない場合にはほぼ一定値を示すが、図13の点Aの時点で停電が発生すると、周波数演算部123が算出する周波数は変動する。図示の例では、停電の発生により周波数が徐々に増加する場合を一例として示しているが、停電の発生状況により、周波数が減少したり、あるいは振動し発散したりするようなこともある。そして点Bの時点で正常周波数範囲を逸脱すると、停電判定部125は、120度通電型整流器11の交流側に停電が発生したと判定する。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2006−14546公報
【特許文献2】特開平6−169501号公報
【特許文献3】特開平6−189411号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
上述の特許文献1(特開2006−14546公報)に記載されたような三相交流入力電圧の振幅に基づき停電を判定する方法では、商用三相交流電源からの交流電力を直流電力へ変換する順変換器として120度通電型整流器を用いた場合、120度通電型整流器の回生動作中に交流電源側に停電が発生すると停電を検知することができない。図14および15は、120度通電型整流器を用いた場合において、電圧の振幅に基づき停電判定するときの問題点を説明する図であって、図14は120度通電型整流器の力行動作時の停電判定を示し、図15は120度通電型整流器の回生動作時の停電判定を示す。なお、図示の例では120度通電型整流器11に平滑コンデンサCを介して接続される逆変換器12については省略している。
【0012】
図14に示すように、モータ駆動装置により120度通電型整流器11が力行動作している時にモータ駆動装置の120度通電型整流器11の交流側に停電が発生すると、120度通電型整流器11内の各スイッチSWR1、SWR2、SWS1、SWS2、SWT1およびSWT2は全てオフしているので、電圧検出部122が検出する120度通電型整流器11の交流側の電圧はほぼゼロとなり、これを検知することで交流側の停電を判定することができる。
【0013】
しかしながら、図15に示すように、モータ駆動装置により120度通電型整流器11が回生動作している時にモータ駆動装置の120度通電型整流器11の交流側に停電が発生すると、オンしているスイッチを通じて直流出力電圧が、電圧検出部122に現れるため、電圧振幅が低下せず停電を検出できない。図示の例で言えば、スイッチSWR1およびSWT2がオンされているので、直流出力電圧は、スイッチSWR1およびSWT2を通じて120度通電型整流器11の交流側に現れることになる。このため、実際に停電が発生したとしても、120度通電型整流器11の交流側の電圧の振幅は低下しないので、停電の発生を検出することができない。
【0014】
また、上述の特許文献2(特開平6−169501号公報)および特許文献3(特開平6−189411号公報)に記載されたような三相交流入力電圧の周波数に基づき停電の有無を判定する方法では、上述の三相交流入力電圧の振幅に基づき停電の有無を判定する方法とは異なり、120度通電型整流器の回生動作中においても交流電源側の停電を検出することができる。しかしながら、停電の検出を早めるために正常周波数範囲の範囲を狭めると停電の誤検出の可能性が高くなり、逆に、停電の誤検出を防ぐために正常周波数範囲の範囲を広げると停電を検出するまでに要する時間がかかり、モータ駆動装置、当該モータ駆動装置が駆動するモータに接続されたツール、および、当該ツールが加工する加工対象などを保護することができなくなる。図16および17は、120度通電型整流器を用いた場合において、電圧の周波数に基づき停電判定するときの問題点を説明する図であって、図16は正常周波数範囲を狭めた場合の停電判定を示し、図17は正常周波数範囲を広げた場合の停電判定を示す。
【0015】
図16に示すように、停電の検出を早めるために正常周波数範囲の範囲を狭めると、例えば図16の点Dの時点で停電が発生すると、周波数演算部123が算出する周波数は変動(図16の例では増加)するが、点Eの時点で正常周波数範囲を逸脱すると、停電判定部125は、120度通電型整流器11の交流側に停電が発生したと判定する。正常周波数範囲の範囲を狭めるほど、停電発生(点D)から停電検知(点E)までの、周波数異常を検出するまでに要する時間は短くなる。120度通電型整流器の回生動作中に停電が発生した場合の電源周波数の変化は、モータ駆動装置の負荷やインピーダンスに依存しており、変化が緩やかな場合もあるため、停電を早く検出するという観点で言えば、周波数変動に対する検出感度は高い方が望ましい。しかしながら、実際の商用三相交流電源3の周波数(50Hzまたは60Hz)は正常な状態であっても多少の変動をしており、停電が発生していない正常時であっても、周波数の変動のいかんによっては、図16の点Cのように正常周波数範囲を逸脱することがある。例えば、交流電源側が分散型電源による小規模な電源等である場合には、周波数変動は大きく、停電の誤検出の発生の可能性が高くなる。
【0016】
一方、図17に示すように、停電の誤検出を防ぐために正常周波数範囲の範囲を広げると、例えば点Fの時点の停電発生後、周波数演算部123が算出する周波数は変動(図17の例では増加)するが、正常周波数範囲の逸脱により120度通電型整流器11の交流側に停電が発生したと停電判定部125が判定する点Gに到達するまでの時間が長くなってしまう。このため、モータ駆動装置、当該モータ駆動装置が駆動するモータに接続されたツール、および、当該ツールが加工する加工対象などを保護するための動作が間に合わなくなる可能性が高くなる。
【0017】
したがって本発明の目的は、上記問題に鑑み、120度通電型整流器の回生動作中であっても交流電源側の停電を高速に検出して装置を保護することができるとともに、停電の誤検出のないモータ駆動装置を提供することにある。
【課題を解決するための手段】
【0018】
上記目的を実現するために、本発明においては、力行動作時には交流側から供給された交流電力を直流電力に変換して出力し、回生動作時には直流側から供給された直流電力を交流電力に変換して出力する120度通電型整流器と、力行動作時には120度通電型整流器が出力した直流電力をモータの駆動のための交流電力に変換してモータへ供給し、回生動作時にはモータからの回生交流電力を直流電力に変換して120度通電型整流器へ戻す逆変換器と、120度通電型整流器の直流出力側の直流電圧を検出する直流電圧検出部と、120度通電型整流器の交流出力側の交流電圧を検出する交流電圧検出部と、交流電圧検出部が検出した交流電圧の周波数を算出する周波数演算部と、120度通電型整流器の回生動作開始時点において直流電圧検出部が検出した直流電圧を基準値として記憶する記憶部と、120度通電型整流器の回生動作期間中、直流電圧検出部が検出した直流電圧と、記憶部に記憶された基準値と、周波数演算部が算出した交流電圧の周波数と、を用いて、120度通電型整流器の交流側の停電の有無を判定する停電判定部と、を備える。
【0019】
本発明の第1の態様によれば、上記停電判定部は、120度通電型整流器の回生動作期間中、直流電圧検出部が検出した直流電圧が基準値よりも大きいか否かを判定する電圧判定部と、120度通電型整流器の回生動作期間中、直流電圧検出部が検出した直流電圧が基準値よりも大きいと電圧判定部が判定した場合、周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する周波数異常検知部と、を有し、周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知した場合、120度通電型整流器の交流側が停電したと判定する。
【0020】
本発明の第2の態様によれば、モータ駆動装置は、交流電圧検出部が検出した交流電圧の振幅を算出する振幅演算部をさらに備え、上記停電判定部は、120度通電型整流器の回生動作期間中、直流電圧検出部が検出した直流電圧が基準値よりも大きいか否かを判定する電圧判定部と、120度通電型整流器の回生動作期間中、直流電圧検出部が検出した直流電圧が基準値よりも大きいと電圧判定部が判定した場合、周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する周波数異常検知部と、周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知した場合、120度通電型整流器による直流電力から交流電力への変換動作を停止する回生停止部と、振幅演算部が算出した交流電圧の振幅が所定の値以下になったか否かを検知する振幅判定部と、を有し、回生停止部により120度通電型整流器の変換動作が停止した後に、振幅演算部が算出した交流電圧の振幅が所定の値以下になったことを振幅判定部が検知した場合、120度通電型整流器の交流側が停電したと判定する。
【0021】
ここで、上記正常周波数範囲は、120度通電型整流器の回生動作開始時点に周波数演算部が算出した周波数を中心値として規定される範囲としてもよい。
【発明の効果】
【0022】
本発明によれば、交流側から供給された交流電力を120度通電型整流器によって直流電力に変換して出力したのちさらに逆変換器によってモータの駆動のための交流電力に変換してモータへ供給するモータ駆動装置において、120度通電型整流器の直流側の直流電圧と、120度通電型整流器の回生動作開始時点の120度通電型整流器の直流側の直流電圧である基準値と、120度通電型整流器の交流側の交流電圧の周波数と、を用いて、120度通電型整流器の交流側の停電の有無を判定することで、120度通電型整流器の回生動作期間中であっても交流電源側の停電を検出して装置を保護することができ、また、正常時において停電を誤検出することもない。
【0023】
本発明の第1の態様によれば、120度通電型整流器の回生動作期間中、120度通電型整流器の直流側の直流電圧が基準値よりも大きくなおかつ120度通電型整流器の交流側の交流電圧の周波数が正常周波数範囲外にあるときに、120度通電型整流器の交流側が停電したと判定するので、停電判定をより正確に行うことができるとともに、正常時において停電を誤検出することもない。
【0024】
本発明の第2の態様によれば、120度通電型整流器の回生動作期間中、120度通電型整流器の直流側の直流電圧が基準値よりも大きくなおかつ120度通電型整流器の交流側の交流電圧の周波数が正常周波数範囲外にあるときに120度通電型整流器による直流電力から交流電力への変換動作を停止しこのときの120度通電型整流器の交流側の交流電圧の振幅が所定の値以下になったときに120度通電型整流器の交流側が停電したと判定するので、停電判定をより正確に行うことができるとともに、正常時において停電を誤検出することもない。
【図面の簡単な説明】
【0025】
【図1】本発明の第1の実施例によるモータ駆動装置を示す回路図である。
【図2】本発明の第1の実施例における停電判定部の動作を説明する図である。
【図3】本発明の第2の実施例によるモータ駆動装置を示す回路図である。
【図4】本発明の第2の実施例における停電判定部の動作を説明する図である。
【図5】本発明の第1の実施例の変形例によるモータ駆動装置を示す回路図である。
【図6】本発明の第1および第2の実施例によるモータ駆動装置1における動作判定部の構成を示す回路図である。
【図7】120度通電型整流器の力行動作と回生動作との切換えを説明する図である。
【図8】複数のモータを駆動する一般的なモータ駆動装置の構成を示す図である。
【図9】一般的なモータ駆動装置による力行動作時の120度通電型整流器における電流の流れを説明する回路図である。
【図10】一般的なモータ駆動装置による回生動作時の120度通電型整流器における電流の流れを説明する回路図である。
【図11】三相交流入力電圧の振幅に基づき停電の有無を判定する停電判定部を示す回路図である。
【図12】三相交流入力電圧の周波数に基づき停電の有無を判定する停電判定部を示す回路図である。
【図13】三相交流入力電圧の周波数に基づき停電の有無を判定する停電判定部の原理説明図である。
【図14】120度通電型整流器を用いた場合において、電圧の振幅に基づき停電判定するときの問題点を説明する図であって、120度通電型整流器の力行動作時の停電判定を示す図である。
【図15】120度通電型整流器を用いた場合において、電圧の振幅に基づき停電判定するときの問題点を説明する図であって、120度通電型整流器の回生動作時の停電判定を示す図である。
【図16】120度通電型整流器を用いた場合において、電圧の周波数に基づき停電判定するときの問題点を説明する図であって、正常周波数範囲を狭めた場合の停電判定を示す図である。
【図17】120度通電型整流器を用いた場合において、電圧の周波数に基づき停電判定するときの問題点を説明する図であって、正常周波数範囲を広げた場合の停電判定を示す図である。
【発明を実施するための形態】
【0026】
以下に説明する実施例では、複数個のモータを駆動制御するモータ制御装置について説明するが、駆動制御するモータの個数は、本発明を特に限定するものではない。
【0027】
図1は、本発明の第1の実施例によるモータ駆動装置を示す回路図である。本発明の第1の実施例によるモータ2を駆動するためのモータ駆動装置1は、120度通電型整流器11と、逆変換器12と、直流電圧検出部21と、交流電圧検出部と22と、周波数演算部23と、記憶部24と、停電判定部25とを備える。
【0028】
120度通電型整流器11は、力行動作時には商用三相交流電源3より供給された交流電力を直流電力に変換して出力し、回生動作時にはモータ2の回生により逆変換器12から供給された直流電力を交流電力に変換して出力する、交直双方向に変換可能である電力変換器である。
【0029】
逆変換器12は、120度通電型整流器11に直流リンクを介して接続されており、力行動作時には120度通電型整流器11が出力した直流電力をモータ2の駆動のための交流電力に変換してモータ2へ供給し、回生動作時にはモータ2からの回生交流電力を直流電力に変換して120度通電型整流器11へ戻す。
【0030】
直流電圧検出部21は、120度通電型整流器11の直流出力側の直流電圧を検出する。一方、交流電圧検出部22は、120度通電型整流器11の交流出力側の交流電圧を検出する。
【0031】
周波数演算部23は、交流電圧検出部22が検出した交流電圧の周波数を算出する。
【0032】
記憶部24は、120度通電型整流器11の回生動作開始時点において直流電圧検出部21が検出した直流電圧を基準値として記憶する。
【0033】
モータ2による回生電力発生後少し間をおいて120度通電型整流器11の回生動作を開始する場合、120度通電型整流器11の直流側の直流電圧は120度通電型整流器11の回生動作開始直後の直流電圧よりも下がるはずであるが、120度通電型整流器11の回生動作開始後しばらくしても直流出力電圧が120度通電型整流器11の回生開始時の直流電圧よりも大きいということは、120度通電型整流器11の直流側から交流側へエネルギーが流れていないということであり、すなわち120度通電型整流器11の交流側において停電が発生している可能性が高い。そこで本発明では、停電判定部25は、120度通電型整流器11の回生動作期間中、直流電圧検出部21が検出した直流電圧と、記憶部24に記憶された基準値と、周波数演算部23が算出した交流電圧の周波数と、を用いて、120度通電型整流器11の交流側の停電の有無を判定する。停電判定部25は、例えばDSPやFPGAなどの演算処理プロセッサからなり、その動作はソフトウェアプログラムにより規定される。
【0034】
本発明の第1の実施例における停電判定部25の構成および動作についてより詳細に説明すると下記の通りである。本発明の第1の実施例における停電判定部25は、第1の条件として、120度通電型整流器11の回生動作期間中に直流電圧検出部21が検出した直流電圧が、120度通電型整流器11の回生動作開始時点において直流電圧検出部21が検出した直流電圧である基準値より大きいこと、第2の条件として、周波数演算部23が算出した交流電圧の周波数が、正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知したこと、の2つ同時に満たすときに、120度通電型整流器11の交流側が停電したと判断するようにする。これにより、正常周波数範囲の幅を狭めたとしても、上記第1の条件および第2の条件の両方を満たさない限りは停電と判断されないので、正常周波数範囲の幅を狭めることで停電の検出時間を早めることが可能となる。また、例えば120度通電型整流器11の力行動作時に周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知したとしても、上記第1の条件を満たさないので、停電の誤検出を防ぐことができる。
【0035】
したがって、本発明の第1の実施例における停電判定部25は、120度通電型整流器11の回生動作期間中、直流電圧検出部21が検出した直流電圧が、120度通電型整流器11の回生動作開始時点において直流電圧検出部21が検出した直流電圧である基準値よりも大きいか否かを判定する電圧判定部31と、120度通電型整流器11の回生動作期間中、直流電圧検出部21が検出した直流電圧が基準値よりも大きいと電圧判定部31が判定した場合、周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する周波数異常検知部32と、を有するように構成する。そして、停電判定部25は、周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知した場合、120度通電型整流器11の交流側が停電したと判定する。なお、本発明の第1の実施例によるモータ駆動装置1は、120度通電型整流器11の回生動作期間中における停電の発生の有無を、120度通電型整流器11の回生動作開始時点において直流電圧検出部21が検出した直流電圧である基準値を用いて判定するが、120度通電型整流器11の回生動作が一旦終了して力行動作に移行した後、再度、120度通電型整流器11の回生動作が開始したときには、モータ駆動装置1は、当該新しい回生動作開始時点において直流電圧検出部21が検出した直流電圧を新たなる基準値として記憶部24に記憶し、当該新しい回生動作期間中の停電の発生の有無を、当該新たなる基準値を用いて判定する。
【0036】
図2は、本発明の第1の実施例における停電判定部の動作を説明する図である。一例として、モータ駆動装置1の制御により、点Iの時点で120度通電型整流器11が力行動作から回生動作に切り替わり、点Jの時点で120度通電型整流器11の交流側で停電が発生した場合を考える。
【0037】
図2に示すように、120度通電型整流器11の交流側で停電が無い状態すなわち正常時において120度通電型整流器11の力行動作が行われている場合は120度通電型整流器11の直流側の直流電圧は一定値である。このときモータ2による回生電力が発生すると、当該回生電力のエネルギーが逆変換器12を介して120度通電型整流器11の直流側に流れ込むので、直流電圧検出部21が検出する直流電圧は増加し始める。120度通電型整流器11の直流側の直流電圧が所定の値に達したとき、モータ駆動装置1の制御により、120度通電型整流器11が力行動作から回生動作に切り替わり(図2の点I)、当該回生電力のエネルギーは、120度通電型整流器11の直流側に流れ始めるので、直流電圧検出部21が検出する直流電圧は減少し始める。ここで、図2の点Jの時点で停電が発生すると、直流電圧検出部21が検出する直流電圧は一転して上昇を始め、周波数演算部23が算出する周波数が変動し始める。図示の例では、周波数の変動の一例として周波数演算部23が算出する周波数が徐々に増加する場合を示している。記憶部24には、120度通電型整流器11の回生開始時点(図2の点I)において直流電圧検出部21が検出した直流電圧が基準値として記憶されているが、停電判定部25内の電圧判定部31は、直流電圧検出部21が検出した直流電圧が、記憶部24に記憶された基準値よりも大きいか否かを判定する。図2の点Kの時点で、直流電圧検出部21が検出した直流電圧が、記憶部24に記憶された基準値よりも大きいと判定すると、停電検出部25の周波数異常検出部32は、周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する。図2の点Lの時点で周波数演算部が算出した交流電圧の周波数が正常周波数範囲外となるが、周波数異常検出部が周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知した場合、停電判定部25は、120度通電型整流器11の交流側が停電したと判定する。つまり、本発明の第1の実施例における停電判定部25は、直流電圧検出部21が検出した直流電圧が記憶部24に記憶された基準値よりも大きいと判定され(図2の点K)なおかつ周波数異常検出部32が周波数異常を検出したときに、初めて停電が発生したと判定するので、正常周波数範囲の範囲を狭めたとしても、停電の検出を早めることができるとともに正常時に停電を誤検出することもなくなる。120度通電型整流器11が力行動作時にある図2の点Hの時点で、周波数演算部23により算出された交流電圧の周波数が何らかの原因により予め設定された正常周波数範囲を超えてしまったとしても、120度通電型整流器11の回生動作期間中ではないことから、停電判定部25は停電と誤判断することはない。
【0038】
続いて、本発明の第2の実施例について説明する。図3は、本発明の第2の実施例によるモータ駆動装置を示す回路図である。本発明の第2の実施例によるモータ駆動装置1は、120度通電型整流器11と、逆変換器12と、直流電圧検出部21と、交流電圧検出部と22と、周波数演算部23と、記憶部24と、判定部25と、振幅演算部26を備える。本発明の第2の実施例における120度通電型整流器11、逆変換器12、直流電圧検出部21、交流電圧検出部22、周波数演算部23、および記憶部24は、上述の第1の実施例と同様であるので、同一の回路構成要素には同一符号を付して当該回路構成要素についての詳細な説明は省略する。
【0039】
停電判定部25は、120度通電型整流器11の回生動作期間中、直流電圧検出部21が検出した直流電圧と、記憶部24に記憶された基準値と、周波数演算部23が算出した交流電圧の周波数と、を用いて、120度通電型整流器11の交流側の停電の有無を判定する。停電判定部25は、例えばDSPやFPGAなどの演算処理プロセッサからなり、その動作はソフトウェアプログラムにより規定される。
【0040】
本発明の第2の実施例における停電判定部25の構成および動作についてより詳細に説明すると下記の通りである。本発明の第2の実施例における停電判定部25は、第1の条件として、120度通電型整流器11の回生動作期間中に直流電圧検出部21が検出した直流電圧が、120度通電型整流器11の回生動作開始時点において直流電圧検出部21が検出した直流電圧である基準値より大きいこと、第2の条件として、周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知したこと、の2つ同時に満たすときに、120度通電型整流器11による直流電力から交流電力への変換動作(すなわち回生動作)を停止する。120度通電型整流器11による回生動作が停止すると、120度通電型整流器11内の半導体スイッチが全てオフされるので、交流電圧検出部22が検出する120度通電型整流器11の交流側の交流電圧は商用三相交流電源3の定格電圧よりも低下する。したがって、交流電圧検出部22が検出する交流電圧の振幅が所定の値以下となったとき、停電したと判断するようにする。ここで、上記「所定の値」は、モータ2の運用状況などに応じてユーザが任意に設定してもよく、例えば商用三相交流電源3の定格電圧の数%〜数十%減の値に設定することが考えられる。またあるいは、上記「所定の値」を交流電圧検出部22の検出限界に応じて設定してもよい。
【0041】
このように、交流電圧検出部22が検出する交流電圧の振幅が所定の値以下となったとき、停電したと判断するようにすることで、仮に正常周波数範囲の幅を狭く設定したとしても、上記第1の条件および第2の条件の両方を満たさない限りは停電と判断されないので、正常周波数範囲の幅を狭めて停電の検出時間を早めることが可能となる。また、例えば120度通電型整流器11の力行動作時に周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知したとしても、上記第1の条件を満たさないので、停電の誤検出を防ぐことができる。
【0042】
したがって、本発明の第2の実施例における停電判定部25は、120度通電型整流器11の回生動作期間中、直流電圧検出部21が検出した直流電圧が基準値よりも大きいか否かを判定する電圧判定部31と、120度通電型整流器11の回生動作期間中、直流電圧検出部21が検出した直流電圧が基準値よりも大きいと電圧判定部31が判定した場合、周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する周波数異常検知部32と、120度通電型整流器11の回生動作期間中、周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部32が所定の期間継続して検知した場合、120度通電型整流器11による直流電力から交流電力への変換動作を停止する回生停止部33と、交流電圧検出部22が検出した交流電圧の振幅を算出する振幅演算部26と、振幅演算部26が算出した交流電圧の振幅が所定の値以下になったか否かを検知する振幅判定部34と、を有するように構成する。そして、停電判定部25は、回生停止部33により120度通電型整流器11の変換動作が停止した後に、振幅判定部34が振幅演算部26が算出した交流電圧の振幅が所定の値以下になったことを検知した場合、120度通電型整流器11の交流側が停電したと判定する。本発明の第2の実施例によるモータ駆動装置1においては、120度通電型整流器11の回生動作が一旦終了して力行動作に移行した後、再度、120度通電型整流器11の回生動作が開始したときには、モータ駆動装置1は、当該新しい回生動作開始時点において直流電圧検出部21が検出した直流電圧を新たなる基準値として記憶部24に記憶し、当該新しい回生動作期間中の停電の発生の有無を、当該新たなる基準値を用いて判定する。
【0043】
図4は、本発明の第2の実施例における停電判定部の動作を説明する図である。一例として、モータ駆動装置1の制御により、点Nの時点で120度通電型整流器11が力行動作から回生動作に切り替わり、点Oの時点で120度通電型整流器11の交流側で停電が発生した場合を考える。
【0044】
図4に示すように、120度通電型整流器11の交流側で停電が無い状態すなわち正常時において120度通電型整流器11の力行動作が行われている場合は120度通電型整流器11の直流側の直流電圧は一定値である。このときモータ2による回生電力が発生すると、当該回生電力のエネルギーが逆変換器12を介して120度通電型整流器11の直流側に流れ込むので、直流電圧検出部21が検出する直流電圧は増加し始める。120度通電型整流器11の直流側の直流電圧が所定の値に達したとき、モータ駆動装置1の制御により、120度通電型整流器11が力行動作から回生動作に切り替わり(図4の点N)、当該回生電力のエネルギーは、120度通電型整流器11の直流側に流れ始めるので、直流電圧検出部21が検出する直流電圧は減少し始める。ここで、図4の点Oの時点で停電が発生すると、直流電圧検出部21が検出した直流電圧は一転して上昇を始め、周波数演算部23が算出する周波数も変動し始める。図示の例では、周波数の変動の一例として周波数演算部23が算出する周波数が徐々に増加する場合を示している。記憶部24には、120度通電型整流器11の回生開始時点(点N)において直流電圧検出部21が検出した直流電圧が基準値として記憶されているが、停電判定部25内の電圧判定部31は、直流電圧検出部21が検出した直流電圧が、記憶部24に記憶された基準値よりも大きいか否かを判定する。図4の点Pの時点で、直流電圧検出部21が検出した直流電圧が、記憶部24に記憶された基準値よりも大きいと判定すると、停電検出部25の周波数異常検出部32は、120度通電型整流器11の回生動作期間中、周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する。図4の点Qの時点で周波数演算部が算出した交流電圧の周波数が正常周波数範囲外となるが、周波数異常検出部が周波数演算部23が算出した交流電圧の周波数が正常周波数範囲外にあることを周波数異常検知部が所定の期間継続して検知した場合、回生停止部33は、120度通電型整流器11による直流電力から交流電力への変換動作を停止する。その後、120度通電型整流器11の交流側の電圧の振幅が所定の値以下になったとこと振幅判定部34が検知したとき、120度通電型整流器11の交流側が停電したと判定する。つまり、本発明の第2の実施例における停電判定部25においても、第1の実施例の場合同様、、120度通電型整流器11の回生動作期間中は、直流電圧検出部21が検出した直流電圧が記憶部24に記憶された基準値よりも大きいと判定されなおかつ周波数異常検出部32が周波数異常を検出したときに、初めて停電が発生したと判定するので、正常周波数範囲の範囲を狭めたとしても、停電の検出を早めることができるとともに正常時に停電を誤検出することもなくなる。また、120度通電型整流器11が力行動作時にある図4の点Mの時点で、周波数演算部23により算出された交流電圧の周波数が何らかの原因により予め設定された正常周波数範囲を超えてしまったとしても、120度通電型整流器11の回生動作期間中ではないことから、停電判定部25は停電と誤判断することはない。
【0045】
なお、上述の本発明の第1および第2の実施例において、上記正常周波数範囲は、商用周波数(50Hzまたは60Hz)を中心値として規定される範囲としたが、商用周波数が変動することを考慮して、120度通電型整流器11の回生動作開始時点に周波数演算部23が算出した周波数を中心値として規定される範囲としてもよい。
【0046】
上述の本発明の第1および第2の実施例の変形例として、上述の停電判定部に加え、120度通電型整流器の交流側の交流電圧の振幅を演算し、その値が所定の値よりも小さい場合に停電と判定するもう一つの停電判定部を設けて、上述の停電判定部との論理和で停電の有無を判定するようにしてもよい。これについて本発明の第1の実施例の場合を例にとり説明すると次の通りである。図5は、本発明の第1の実施例の変形例によるモータ駆動装置を示す回路図である。図1を参照して説明した本発明の第1の実施例における停電判定部25を、図5では参照符号25−1で示す。さらなる停電判定部25−2は、振幅演算部26により算出された120度通電型整流器11の交流側の電圧の振幅が、所定の値よりも小さい場合に停電と判定する。停電判定部25−1および停電判定部25−2のうちの少なくとも1つが停電と判定したとき、最終的な判断として、120度通電型整流器11の交流側が停電していると判定する。本発明の第2の実施例についても同様の変形が可能である。
【0047】
なお、本発明の第1および第2の実施例によるモータ駆動装置1は、上述のように120度通電型整流器11が力行動作状態にあるか回生動作状態にあるかにより停電判定の処理内容が決まるため、120度通電型整流器11を力行動作させるか回生動作させるかを決定する動作決定部27を備える。図6は、本発明の第1および第2の実施例によるモータ駆動装置1における動作判定部の構成を示すブロック図である。図6では、説明を簡明にするために主として動作決定部27の構成を示している。また、図7は、120度通電型整流器の力行動作と回生動作との切換えを説明する図である。
【0048】
120度通電型整流器11内のスイッチが全てオフの状態で力行動作時にある場合おいて、モータ2から回生電力が発生し逆変換器12から当該回生電力が供給され始めると、平滑コンデンサCに電荷が蓄積され、120度通電型整流器11の直流側の直流電圧が上昇していく(図7の点R)。そこで、動作決定部27内の回生動作開始判定ブロック64は、直流電圧検出部21により検出された直流電圧が所定の値を超えた場合に、または、直流電圧検出部21により検出された直流電圧と、電圧振幅演算ブロック62により算出された120度通電型整流器11の交流側の相間電圧の振幅との電位差が所定の値を超えた場合に、120度通電型整流器11を力行動作から回生動作に切り替えることを決定する(図7の点S)。この決定に基づき、スイッチングパターンパターン演算ブロック66は、120度通電型整流器11に対し、直流電力から交流電力への変換動作(すなわち回生動作)をするような半導体スイッチに対するオン/オフ信号を出力し、この信号に基づき、120度通電型整流器11は、直流電力から交流電力への変換動作(すなわち回生動作)を行う。このとき、120度通電型整流器11の交流側に停電が無ければ、平滑コンデンサCに蓄積された回生エネルギーは120度通電型整流器11を経由して商用三相交流電源3側に戻されることになるので、直流電圧検出部21により検出された直流電圧は低下し(図7の点T)、その後、ほぼ一定値となる。逆変換器12からの回生電力の供給が終了すると、電力演算部63により演算される120度通電型整流器11の交流側の電力が少なくともゼロ以上の値(すなわち負ではない値)になる。この120度通電型整流器11の交流側の電力が所定の閾値を超えたとき、回生動作停止判定ブロック65は回生動作停止を決定してスイッチングパターン演算ブロック66に対してその旨を通知する。スイッチングパターン演算ブロック66は、回生動作開始判定ブロック64、回生動作停止判定ブロック65および電圧位相演算部61からの指令に基づき、120度通電型整流器11内の半導体スイッチに対するオンオフ信号を作成する。
【0049】
なお、上述の周波数演算部23、停電判定部25、25−1および25−2、振幅演算部26、動作決定部27、電圧判定部31、周波数異常検出部32、回生停止部33、振幅判定部34などは、例えばDSPやFPGAなどの演算処理プロセッサからなり、その動作はソフトウェアプログラムにより規定される。
【産業上の利用可能性】
【0050】
本発明は、工作機械、鍛圧機械、射出成形機、産業機械、あるいは各種ロボット内のモータを駆動するモータ駆動装置として、入力された交流を直流に変換する120度通電型整流器と、直流変換部から出力された直流を各モータの駆動電力としてそれぞれ供給される交流に変換する逆変換器と、を有するものにおいて、120度通電型整流器の交流側の停電の発生の有無の判定に適用することができる。
【符号の説明】
【0051】
1 モータ駆動装置
2 モータ
3 商用三相交流電源
11 120度通電型整流器
12 逆変換器
21 直流電圧検出部
22 交流電圧検出部
23 周波数演算部
24 記憶部
25、25−1、25−2 停電判定部
26 振幅演算部
27 動作決定部
31 電圧判定部
32 周波数異常検出部
33 回生停止部
34 振幅判定部
【特許請求の範囲】
【請求項1】
力行動作時には交流側から供給された交流電力を直流電力に変換して出力し、回生動作時には直流側から供給された直流電力を交流電力に変換して出力する120度通電型整流器と、
力行動作時には前記120度通電型整流器が出力した直流電力をモータの駆動のための交流電力に変換してモータへ供給し、回生動作時にはモータからの回生交流電力を直流電力に変換して前記120度通電型整流器へ戻す逆変換器と、
前記120度通電型整流器の直流出力側の直流電圧を検出する直流電圧検出部と、
前記120度通電型整流器の交流出力側の交流電圧を検出する交流電圧検出部と、
前記交流電圧検出部が検出した交流電圧の周波数を算出する周波数演算部と、
前記120度通電型整流器の回生動作開始時点において前記直流電圧検出部が検出した直流電圧を、基準値として記憶する記憶部と、
前記120度通電型整流器の回生動作期間中、前記直流電圧検出部が検出した直流電圧と、前記記憶部に記憶された前記基準値と、前記周波数演算部が算出した交流電圧の周波数と、を用いて、前記120度通電型整流器の交流側の停電の有無を判定する停電判定部と、
を備えることを特徴とするモータ駆動装置。
【請求項2】
前記停電判定部は、
前記120度通電型整流器の回生動作期間中、前記直流電圧検出部が検出した直流電圧が前記基準値よりも大きいか否かを判定する電圧判定部と、
前記120度通電型整流器の回生動作期間中、前記直流電圧検出部が検出した直流電圧が前記基準値よりも大きいと前記電圧判定部が判定した場合、前記周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する周波数異常検知部と、
を有し、前記周波数演算部が算出した交流電圧の周波数が前記正常周波数範囲外にあることを前記周波数異常検知部が所定の期間継続して検知した場合、前記120度通電型整流器の交流側が停電したと判定する請求項1に記載のモータ駆動装置。
【請求項3】
前記交流電圧検出部が検出した交流電圧の振幅を算出する振幅演算部をさらに備え、
前記停電判定部は、
前記120度通電型整流器の回生動作期間中、前記直流電圧検出部が検出した直流電圧が前記基準値よりも大きいか否かを判定する電圧判定部と、
前記120度通電型整流器の回生動作期間中、前記直流電圧検出部が検出した直流電圧が前記基準値よりも大きいと前記電圧判定部が判定した場合、前記周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する周波数異常検知部と、
前記周波数演算部が算出した交流電圧の周波数が前記正常周波数範囲外にあることを前記周波数異常検知部が所定の期間継続して検知した場合、前記120度通電型整流器による直流電力から交流電力への変換動作を停止する回生停止部と、
前記振幅演算部が算出した交流電圧の振幅が所定の値以下になったか否かを検知する振幅判定部と、
を有し、前記回生停止部により前記120度通電型整流器の前記変換動作が停止した後に、前記振幅演算部が算出した交流電圧の振幅が所定の値以下になったことを前記振幅判定部が検知した場合、前記120度通電型整流器の交流側が停電したと判定する請求項1に記載のモータ駆動装置。
【請求項4】
前記正常周波数範囲は、前記120度通電型整流器の回生動作開始時点に前記周波数演算部が算出した周波数を中心値として規定される範囲である請求項1〜3のいずれか一項に記載のモータ駆動装置。
【請求項1】
力行動作時には交流側から供給された交流電力を直流電力に変換して出力し、回生動作時には直流側から供給された直流電力を交流電力に変換して出力する120度通電型整流器と、
力行動作時には前記120度通電型整流器が出力した直流電力をモータの駆動のための交流電力に変換してモータへ供給し、回生動作時にはモータからの回生交流電力を直流電力に変換して前記120度通電型整流器へ戻す逆変換器と、
前記120度通電型整流器の直流出力側の直流電圧を検出する直流電圧検出部と、
前記120度通電型整流器の交流出力側の交流電圧を検出する交流電圧検出部と、
前記交流電圧検出部が検出した交流電圧の周波数を算出する周波数演算部と、
前記120度通電型整流器の回生動作開始時点において前記直流電圧検出部が検出した直流電圧を、基準値として記憶する記憶部と、
前記120度通電型整流器の回生動作期間中、前記直流電圧検出部が検出した直流電圧と、前記記憶部に記憶された前記基準値と、前記周波数演算部が算出した交流電圧の周波数と、を用いて、前記120度通電型整流器の交流側の停電の有無を判定する停電判定部と、
を備えることを特徴とするモータ駆動装置。
【請求項2】
前記停電判定部は、
前記120度通電型整流器の回生動作期間中、前記直流電圧検出部が検出した直流電圧が前記基準値よりも大きいか否かを判定する電圧判定部と、
前記120度通電型整流器の回生動作期間中、前記直流電圧検出部が検出した直流電圧が前記基準値よりも大きいと前記電圧判定部が判定した場合、前記周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する周波数異常検知部と、
を有し、前記周波数演算部が算出した交流電圧の周波数が前記正常周波数範囲外にあることを前記周波数異常検知部が所定の期間継続して検知した場合、前記120度通電型整流器の交流側が停電したと判定する請求項1に記載のモータ駆動装置。
【請求項3】
前記交流電圧検出部が検出した交流電圧の振幅を算出する振幅演算部をさらに備え、
前記停電判定部は、
前記120度通電型整流器の回生動作期間中、前記直流電圧検出部が検出した直流電圧が前記基準値よりも大きいか否かを判定する電圧判定部と、
前記120度通電型整流器の回生動作期間中、前記直流電圧検出部が検出した直流電圧が前記基準値よりも大きいと前記電圧判定部が判定した場合、前記周波数演算部が算出した交流電圧の周波数が正常周波数範囲外にあるか否かを判定する周波数異常検知部と、
前記周波数演算部が算出した交流電圧の周波数が前記正常周波数範囲外にあることを前記周波数異常検知部が所定の期間継続して検知した場合、前記120度通電型整流器による直流電力から交流電力への変換動作を停止する回生停止部と、
前記振幅演算部が算出した交流電圧の振幅が所定の値以下になったか否かを検知する振幅判定部と、
を有し、前記回生停止部により前記120度通電型整流器の前記変換動作が停止した後に、前記振幅演算部が算出した交流電圧の振幅が所定の値以下になったことを前記振幅判定部が検知した場合、前記120度通電型整流器の交流側が停電したと判定する請求項1に記載のモータ駆動装置。
【請求項4】
前記正常周波数範囲は、前記120度通電型整流器の回生動作開始時点に前記周波数演算部が算出した周波数を中心値として規定される範囲である請求項1〜3のいずれか一項に記載のモータ駆動装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−115994(P2013−115994A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−262064(P2011−262064)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(390008235)ファナック株式会社 (1,110)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(390008235)ファナック株式会社 (1,110)
【Fターム(参考)】
[ Back to top ]