
健全性評価装置及びその方法並びにプログラム
【課題】検査対象に適合した相関行列の逆行列を得ることにより信頼性の高いマハラノビス距離を算出すること。
【解決手段】マハラノビス距離を算出するのに使用する相関行列の逆行列において、固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める際に、単位空間を定義するための単位空間データ行列と健全性評価の対象となるトランスミッションから取得されたデータであり、かつ、該単位空間に属すると判断できる比較データの行列のそれぞれについて、行毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、比較データが単位空間に属すると判定される固有値閾値の適正範囲を求める健全性評価装置10を提供する。
【解決手段】マハラノビス距離を算出するのに使用する相関行列の逆行列において、固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める際に、単位空間を定義するための単位空間データ行列と健全性評価の対象となるトランスミッションから取得されたデータであり、かつ、該単位空間に属すると判断できる比較データの行列のそれぞれについて、行毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、比較データが単位空間に属すると判定される固有値閾値の適正範囲を求める健全性評価装置10を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、マハラノビス・タグチメソッド(以下「MT法」という。)を用いて検査対象である機器の健全性を評価する健全性評価装置及びその方法並びにプログラムに関するものである。
【背景技術】
【0002】
従来、機器の健全性を評価する際に、MT法を適用し、マハラノビス距離(MD値)に基づいて異常を検出する方法が提案されている(例えば、特許文献1参照)。
MT法は、正常データの集団である単位空間を定義し、この単位空間を用いて現在状態において取得した検査対象の信号データのマハラノビス距離を算出し、算出したマハラノビス距離に基づいて検査対象の異常を判断するものである。マハラノビス距離が大きい場合は、正常データの集団である母集団から乖離していることなり、何らかの特性値に異常が発生していると評価することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−279056号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
マハラノビス距離の算出は、単位空間から計算される相関行列の逆行列が用いられるが、相関行列の性質によっては逆行列が計算できない場合がある。例えば、単位空間を構成する特性項目の間に強い相関がある(相関係数の絶対値が1に近い)場合や、単位空間を構成する特性項目の個数よりも単位空間のデータ数が少ない場合には、適切な相関行列の逆行列を得ることができず、マハラノビス距離を算出することができないという問題があった。
【0005】
本発明は、このような事情に鑑みてなされたものであって、検査対象に適合した相関行列の逆行列を得ることにより信頼性の高いマハラノビス距離を算出することのできる健全性評価装置及びその方法並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明は以下の手段を採用する。
本発明は、マハラノビス距離を用いて機器の健全性評価を行う健全性評価装置であって、単位空間を定義するための単位空間データと、健全性評価の対象となる前記機器から取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとを記憶する第1記憶手段と、前記単位空間データの相関行列を固有値分解する固有値分解手段と、固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定手段と、前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出手段と、前記近似逆行列を記憶する第2記憶手段と、前記検査対象の健全性を評価するための検査データが入力された場合に、前記第2記憶手段から前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算手段とを有し、前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、前記閾値適正範囲決定手段は、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を求める健全性評価装置を提供する。
【0007】
本発明によれば、単位空間データ及び正常と判断できる機器の信号データとを用意し、これらの各データにおいて情報量規準が最小となる固有値の候補閾値を求め、この候補閾値の分布から、正常と判断できる機器の信号データが単位空間データに属するような固有値閾値の範囲を求め、この範囲において決定された固有値閾値に基づいて導出された近似逆行列を用いてマハラノビス距離を算出する。このように、相関行列の逆行列を検査対象である機器に適合させるので、単位空間を構成する特性項目の間に強い相関がある(相関係数の絶対値が1に近い)場合や、単位空間を構成する特性項目の個数よりも単位空間のデータ数が少ない場合であっても、信頼性の高いマハラノビス距離を算出することができる。また、検査対象となる機器の正常データを用いて逆行列を適合化させるので、個体差による誤差を解消でき、定量的に健全性評価を行うことが可能となる。
すなわち、信頼性の高いマハラノビス距離を算出するためには、特性項目数が単位空間データ数よりも多い場合などに、ノイズではない独立した主成分ベクトル(固有値)の個数を与える明確な指標が必要となる。本発明では、この指標として情報量規準を導入し、この情報量基準が最小となる条件が妥当な条件とみなしている。
この情報量規準については、例えば、マハラノビス距離は単位空間に属するデータが多変量正規分布に従うという前提から計算されるため、多変量正規分布モデル(後述する実施形態に係る「正規分布モデルAIC」に相当する)を採用するとよい。
また、上記多変量正規分布モデルには、マハラノビス距離そのものが含まれることから、数値誤差でマハラノビス距離が負になる場合には情報量規準の値が定義できず判定が不可能となる。そこで、数値誤差を評価する情報量規準、例えば、観測値から予測値を与える射影行列(ハット行列)を用いたハットAICなどを組み合わせて用いるとよい。
また、例えば、上記近似逆行列算出手段は、固有値閾値以下の固有値をゼロまたはゼロに近い所定の値に置換して、相関行列の近似逆行列を計算することとしてもよい。
【0008】
上記健全性評価装置において、前記第1記憶手段には、前記単位空間において異常を定義するための異常データが記憶されており、前記異常データの行列は、行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、前記閾値適正範囲決定手段は、前記異常データの行列について、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、前記比較データが前記単位空間に属するとともに、前記比較データが前記異常データと区別される固有値閾値の適正範囲を求めることとしてもよい。
【0009】
このように、異常データについても事前に用意し、異常データにおいて情報量規準が最小となる固有値の候補閾値を求め、この候補閾値の分布から、正常と判断できる機器の信号データが異常データとは区別されるような固有値閾値の範囲を求めることとしてもよい。これにより、更に信頼性の高いマハラノビス距離を算出することができる。
【0010】
上記健全性評価装置において、前記閾値適正範囲決定手段は、 前記閾値適正範囲決定手段は、前記単位空間については各データコードのそれぞれについて、計算対象の行を除いた残りのデータを用いて相関行列を求め、候補閾値の値を前記固有値分解手段により求められた固有値の範囲内で随時更新しながら、前記計算対象のデータコードに対応する行または列を除いた相関行列及び前記計算対象のデータコードに対応する行または列の情報を用いて情報量規準を計算し、計算した複数の情報量規準の中で最小値を示したときの候補閾値と前記計算対象のデータコードに対応する行または列とを対応付けて保存することとしてもよい。
【0011】
情報量規準の計算に用いる相関行列に検査したいデータ(例えば、計算対象のデータコード)が含まれる場合は、そのデータのマハラノビス距離が小さい値となったり、異常なハット行列であっても同じデータに写像されるおそれがある。そこで、交差検証法(Cross Validation)を用いて検査したい単位空間データを除いて相関行列を計算し、この相関行列と検査したいデータとから情報量規準を計算する。これにより、データのマハラノビス距離が小さい値となる、異常なハット行列であっても同じデータに写像されるなどといった不都合を解消することができ、一定の精度で情報量規準の値を求めることが可能となる。
【0012】
本発明は、マハラノビス距離を用いて機器の健全性評価を行う健全性評価方法であって、単位空間を定義するための単位空間データと、健全性評価の対象となる前記機器から取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとが記憶された記憶手段から該データを読み出すデータ読み出し工程と、前記単位空間データの相関行列を固有値分解する固有値分解工程と、固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定工程と、前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出工程と、前記近似逆行列を記憶する記憶工程と、前記検査対象の健全性を評価するための検査データが入力された場合に、記憶していた前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算工程とを有し、前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、前記閾値適正範囲決定工程は、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を決定する健全性評価方法を提供する。
【0013】
本発明は、マハラノビス距離を用いた機器の健全性評価をコンピュータに実行させるための健全性評価プログラムであって、単位空間を定義するための単位空間データと健全性評価の対象となる前記機器から取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとが記憶された記憶手段から該データを読み出すデータ読み出しステップと、前記単位空間データの相関行列を固有値分解する固有値分解ステップと、固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定ステップと、前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出ステップと、前記近似逆行列を記憶する記憶ステップと、前記検査対象の健全性を評価するための検査データが入力された場合に、記憶していた前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算ステップとを有し、前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、前記閾値適正範囲決定ステップは、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を決定する健全性評価プログラムを提供する。
【0014】
本発明は、マハラノビス距離を用いてヘリコプターのトランスミッションの健全性評価を行う健全性評価装置であって、単位空間を定義するための単位空間データと、健全性評価の対象となる前記トランスミッションから取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとを記憶する第1記憶手段と、前記単位空間データの相関行列を固有値分解する固有値分解手段と、固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定手段と、前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出手段と、前記近似逆行列を前記検査対象のトランスミッションの識別情報と対応付けて記憶する第2記憶手段と、前記検査対象となるトランスミッションの識別情報と該トランスミッションの健全性を評価するための検査データとが入力された場合に、前記第2記憶手段から前記トランスミッションの識別情報に対応付けられた前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算手段とを有し、前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、前記閾値適正範囲決定手段は、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を求める健全性評価装置を提供する。
【発明の効果】
【0015】
本発明によれば、信頼性の高いマハラノビス距離を算出することができるという効果を奏する。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施形態に係る健全性評価装置のハードウェア構成の一例を示した図である。
【図2】単位空間データ及び異常データを取得するために使用した歯車試験装置の概略構成を示した図である。
【図3】本発明の一実施形態に係る健全性評価装置により行われる近似逆行列導出処理の処理手順を示したフローチャートである。
【図4】本発明の一実施形態に係る健全性評価装置により行われる固有値閾値の適正範囲決定処理の処理手順を示したフローチャートである。
【図5】本発明の一実施形態に係る健全性評価装置により行われる固有値閾値の適正範囲決定処理の処理手順を示したフローチャートである。
【図6】単位空間データに関するハットAIC及び正規分布モデルAICの算出処理の処理手順を示したフローチャートである。
【図7】固有値閾値の適正範囲の決定方法の概念を説明するための図である。
【図8】本発明の一実施形態に係る健全性評価装置の効果を示した図である。
【図9】本発明の一実施形態に係る健全性評価装置の効果を示した図である。
【発明を実施するための形態】
【0017】
以下に、本発明に係る健全性評価装置及びその方法並びにプログラムをヘリコプターのトランスミッションの健全性評価に適用した場合の一実施形態について、図面を参照して説明する。
【0018】
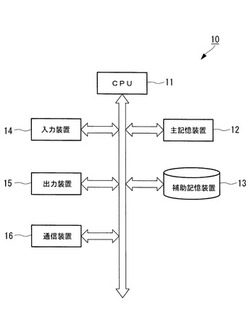
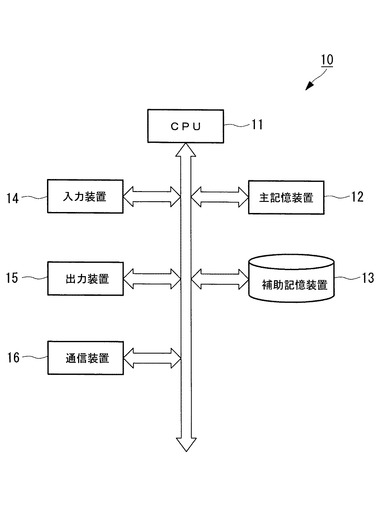
図1は、本発明の一実施形態に係る健全性評価装置10のハードウェア構成の一例を示した図である。図1に示すように、健全性評価装置10は、コンピュータ装置であり、CPU(中央演算処理装置)11、主記憶装置12、ハードディスクなどの補助記憶装置13、データを入力するための入力装置14、及びディスプレイやプリンタなどの出力装置15、外部との通信を行う通信装置16などで構成されている。
補助記憶装置13には、各種プログラム(例えば、健全性評価プログラム)が格納されており、CPU11が補助記憶装置13から主記憶装置12にプログラムを読み出し、実行することにより後述する種々の処理を実現させる。
【0019】
まず、検査対象であるヘリコプターのトランスミッションの健全性を評価するに当たり、単位空間を定義するための単位空間データと、該単位空間において異常を定義するための異常データとを事前に取得する。
しかし、ここでは本発明の概念説明を簡単化するため、複雑なトランスミッションそのものではなく、トランスミッションの構成要素だけ(一部の歯車)を抜き出した歯車試験装置で実施形態を説明するが、本発明の概念は複雑なトランスミッション実物にも容易に適用可能である。トランスミッション実物の場合は、さらに複雑な装置構成・より多くのセンサの設置・より多くの信号を扱うが、当業者であれば、以下の説明から容易に実際のトランスミッションにも適用することが可能である。
【0020】
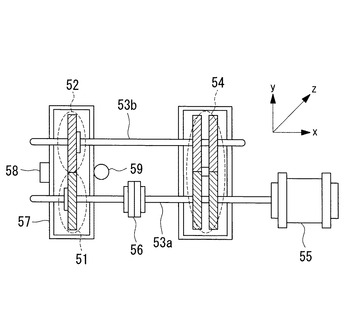
本実施形態では、例えば、図2に示すような歯車試験装置を用意し、この歯車試験装置を用いて事前試験を行い、正常時のデータと異常時のデータとを取得する。図2に示される歯車試験装置の外形寸法は試験機材に合わせた形状とし、歯車精度はヘリコプター用のトランスミッション相当とされている。また、図2の歯車試験装置とは異なり、格段に複雑なトランスミッション実物への本発明の適用法として、例えば、ヘリコプターに搭載されるトランスミッションと同一の供試体を用いて正常データおよび異常データを取得することとしてもよい。ヘリコプターに使用されるトランスミッションと同一の供試体を用いて正常データおよび異常データを取得することで、トランスミッションに適用可能な正常データおよび異常データを取得することができる。
【0021】
歯車試験装置において、試験対象として駆動歯車51、従動歯車52の2つを用いる。駆動歯車51及び従動歯車52は、シャフト53a、53bによって一対の動力循環歯車54に連結されている。また、動力循環歯車54には、モータ55が連結されている。シャフト53aにおいて、動力循環歯車54と駆動歯車51との間には、固定軸継手56が設けられている。駆動歯車51及び従動歯車52を収容するハウジング57には、2つの加速度センサ58、59が設けられている。加速度センサ58は、軸方向(図中のx方向)における振動信号を検出するためのセンサであり、加速度センサ59は軸に垂直な方向(図中のz方向、以下「縦方向」という。)における振動信号を検出するためのセンサである。なお、ここでは、2つの加速度センサ58、59を用いて振動信号を取得することとしたが、センサの個数については限定されない。
【0022】
このような構成を備える歯車試験装置において、モータ55が回転することにより、そのトルクが駆動歯車51に伝達されて駆動歯車51が回転し、駆動歯車51の回転に伴い従動歯車52が回転させられる。回転したときの振動は、加速度センサ58、59により検出され、この振動データが生データとしてデータロガー(図示略)に記録される。
正常時の試験では、例えば、モータトルク及びモータ回転数は一定に制御される。
異常時の試験では、例えば、人工的に歯車に傷をつけ、この状態にてデータを取得する。
【0023】
上記試験においてデータロガーに記録された正常時の生データ、異常時の生データは、健全性評価装置10に入力される。健全性評価装置10は、これら入力データを用いて、所定の時間間隔毎の平均値、分散、標準偏差、実効値、波形率、波効率、衝撃指数、変動率、歪度、尖度、噛合周波数成分とそのサイドバンド周波数成分及びシャフト回転周波数成分を計算する。
平均値、分散、標準偏差、実効値、波形率、波効率、衝撃指数、変動率、歪度、尖度の計算式を以下の表1に示す。ここで、表1におけるxiは、以下の数値である。
【0024】
xi=(元データ−元データの平均値)の絶対値
【0025】
また、上記平均値、分散、標準偏差、実効値、波形率、波効率、衝撃指数、変動率、歪度、尖度、噛合周波数成分とそのサイドバンド周波数成分及びシャフト回転周波数成分のそれぞれを特性項目と定義する。
【0026】
【表1】

【0027】
上記算出結果は、単位空間データ、異常データとして、補助記憶装置13に記憶される。
【0028】
次に、ヘリコプターのトランスミッションの健全性評価を行う場合、検査対象となるトランスミッションに適合するように、マハラノビス距離を算出するのに用いられる単位空間の逆行列を修正する必要がある。
例えば、マハラノビス距離による健全性評価を行う場合、検査対象となる機器の正常データ群を取得し、その正常データの集合を用いて単位空間を定義するのであれば、単位空間は自身のデータを元に定義されるため個体差による不都合は生じない。
【0029】
しかしながら、本実施形態では、図2の歯車試験装置を用いて取得した正常データを単位空間データとして用いるため、単位空間データの逆行列をそのまま使用してマハラノビス距離を算出すると、個体差によるマハラノビス距離のばらつきが生じ、検査対象によっては、正常であるにもかかわらずマハラノビス距離が大きくなってしまい、異常と判断されてしまうおそれがある。
【0030】
また、上記個体差の問題に加えて、例えば、単位空間を構成する特性項目の間に強い相関がある(相関係数の絶対値が1に近い)場合や、単位空間を構成する特性項目の個数よりも単位空間のデータ数が少ない場合には、適切な相関行列の逆行列を得ることができず、マハラノビス距離を算出することができないという問題もある。
そこで、上記不具合を解消するために、検査対象の健全性評価を行う事前準備として、単位空間データの相関行列の逆行列を該検査対象に適合させた近似逆行列を求める。以下、近似逆行列の導出方法について説明する。
【0031】
まず、検査対象であるヘリコプターのトランスミッションの正常データを取得する。例えば、健全性評価を行うトランスミッションの使用初期に得られた振動データを正常データとして取得する。一般的に、トランスミッションをヘリコプターに搭載する際、そのトランスミッションが正常であることを確認した上で搭載するため、使用初期における振動データは正常なデータであるとみなすことができる。
【0032】
振動データは、上記試験と同様に、ヘリコプターのトランスミッションに歯車の軸方向の振動を検出する加速度センサと、縦方向の振動を検出する加速度センサを設置し、これらの加速度センサによって得る。振動データはヘリコプターの飛行中に得られるデータであるため、例えば、ヘリコプターにデータロガーなどの記憶装置を設置し、飛行中に測定された振動データを保存しておく。そして、着陸後にデータロガーに蓄積された振動データを健全性評価装置10に入力する。
【0033】
健全性評価装置10は、データロガーから正常データであるとみなせる振動データの生データが入力されると、事前試験と同様の手法によって、所定の時間間隔毎の平均値、分散などの各特性項目のデータを算出し、算出結果を検査対象の正常データ(比較データ)として補助記憶装置13に記憶する。
【0034】
これにより、補助記憶装置13には、歯車試験装置によって得た単位空間データ、異常データ、及び検査対象の正常データ(以下「信号データ」という。)が記憶される。そして、これらのデータを用いて近似逆行列の作成処理が実行される。
【0035】
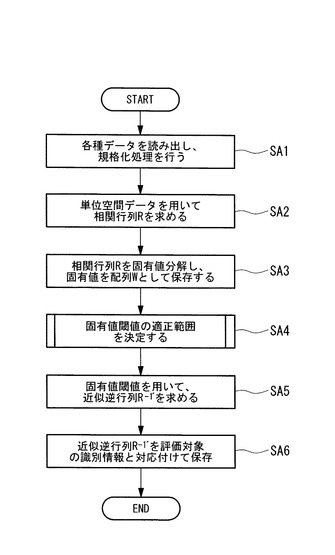
図3は、本実施形態に係る健全性評価装置により行われる近似逆行列導出処理の処理手順を示したフローチャートである。
まず、補助記憶装置13から単位空間データ、異常データ、信号データ(比較データ)を読み出し、これらを行列で表わすとともに、それぞれ規格化処理を行う(図3のステップSA1)。
【0036】
例えば、特性項目数をn、各特性項目のデータ数をtとすると、この行列はt行n列の行列として示すことができる。例えば、200種の特性項目において、1分間隔で10時間分のデータ数を取得した場合は、600行(10時間×60分=600分)、200列の行列となる。なお、単位空間などの行列作成については、例えば、特開2009−288100号公報に詳述されているため、詳細説明は省略する。
【0037】
次に、行と列とによって特定される特性値xijを以下の(1)式、(2)式に基づいて算出した平均値mj及び標準偏差σjを用いて規格化する処理を行う。単位空間データの特性値xijの規格化後の値は、正規格値Xijとして表され、以下の(3)式で求められる。
ここで、iは行を、jは列を示している。すなわち、xiは、i行目の全ての特性値、すなわち、同じ時間に得られた各特性項目のデータの集合体を意味し、yjは、所定の特性項目に係る全てのデータを意味し、xijは所定の特性項目において所定の時間に得られたデータを意味する。
【0038】
【数1】
【0039】
このように、データを規格化することにより、異なった特性項目間(計測物理量間)の特性値を公平に扱うことが可能となる。
異常データ、信号データについても同様の演算を行うことにより規格化を行う。規格化後の異常データの特性値をZij、信号データの特性値をYijとする。
なお、以降の説明において、単位空間データ、異常データ、信号データは、それぞれ規格化後の特性値からなるデータセットを意味する。
【0040】
次に、単位空間データの特性値Xijを用いて、相関行列R=(rij)を計算する(図3のステップSA2)。相関行列Rは以下の(4)式を用いて導出される。相関行列は対角成分が1であるn次行列となる。
【0041】
【数2】
【0042】
次に、相関行列Rを固有値分解し、固有値λ1,λ2,・・・,λnを得、これら固有値λ1,λ2,・・・,λnを配列Wとして保存する(ステップSA3)。固有値分解した相関行列Rは以下の(5)式で表わされる。ここで、固有値は、大きい順に並べられている。すなわち、各固有値はλ1>λ2>・・・>λnの関係にある。
【0043】
【数3】
【0044】
上記(5)式において、Vは各固有値に対応する固有ベクトルを並べた直交行列、V´はVの転置行列である。
【0045】
次に、固有値閾値の適正範囲を決定する(ステップSA4)。図4及び図5は、固有値閾値の適正範囲決定処理の処理手順を示したフローチャートである。
【0046】
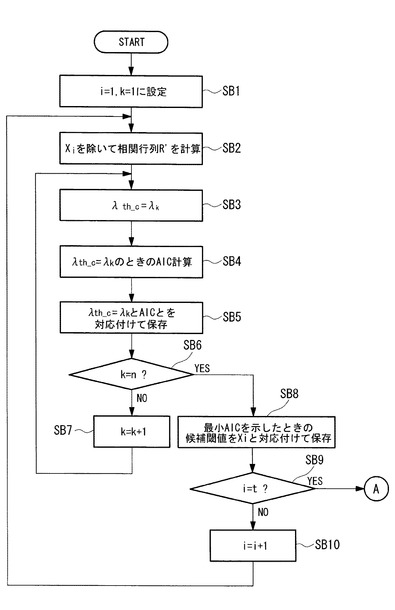
まず、初期設定としてi=1,k=1に設定する(図4のステップSB1)。次に、単位空間データの中からXiのデータ、すなわち1行目のデータを除いた残りの単位空間データを用いて相関行列R´を計算する(ステップSB2)。次に、配列Wのうち固有値λkを候補閾値λth_cに設定する(ステップSB3)。続いて、候補閾値をλth_c=λkに設定したときの情報量規準(AIC:Akaike's Information Criterion)を求める(ステップSB4)。ここでは、ハットAICと正規分布モデルAICの2つのAICを求める。なお、具体的な算出処理については後述する。
【0047】
続いて、ステップSB4で計算したAICをλth_c=λk(k=1)と対応付けて保存し(ステップSB5)、k=nでない場合、すなわち、候補閾値として配列Wとして記憶されている全ての固有値が設定されていない場合には(ステップSB6において「NO」)、k=k+1と設定して(ステップSB7)、ステップSB3に戻り、次の候補閾値λth_c=λk(k=2)について、同様の処理を行う。そして、上記ステップSB3からステップSB7の処理を繰り返し実施し、ステップSB6においてk=n、すなわち、固有値λ1からλnまでのそれぞれについてAICの計算が終了したと判断すると(ステップSB6において「YES」)、算出したn個のハットAICのうち、最小値を示したときの候補閾値を取得するとともに、n個の正規分布モデルAICのうち最小値を示したときの候補閾値を取得し、これらの候補閾値と単位空間データから除いたXi(i=1)とを対応付けて保存する(ステップSB8)。
【0048】
続いて、i=tでなければ、すなわち、単位空間データの全ての行について上記処理が行われていない場合には(ステップSB9において「NO」)、i=i+1とし(ステップSB10)、ステップSB2に戻り、以降の処理を実行する。これにより、単位空間データから2行目のデータを除いた残りの単位空間データを用いて相関行列R´が計算され、この相関行列R´について、最小AICを示したときの候補閾値が求められる。そして、このような最小AICを示したときの候補閾値が単位空間データの全ての行について求められると(ステップSB9において「YES」)、ステップSB11に移行し、信号データを対象とした処理に移行する。
【0049】
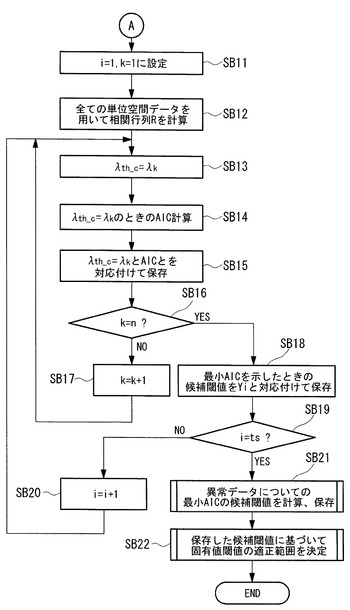
具体的には、初期設定としてi=1,k=1に設定し(図5のステップSB11)、全ての単位空間データを用いて相関行列Rを計算する(ステップSB12)。次に、配列Wのうち固有値λkを候補閾値λth_cに設定する(ステップSB13)。続いて、候補閾値をλth_c=λkに設定したときの信号データYiのAICを求める(ステップSB14)。なお、信号データYiのAICの算出方法については後述する。
【0050】
続いて、計算したハットAIC、正規分布モデルAICをλth_c=λk(k=1)と対応付けて保存し(ステップSB15)、k=nでなければ(ステップSB16において「NO」)、k=k+1と設定して(ステップSB17)、ステップSB13に戻り、次の候補閾値λth=λ2について、同様の処理を行う。そして、上記ステップSB13からステップSB17の処理を繰り返し実施し、ステップSB16においてk=n、すなわち、固有値λ1からλnまでのそれぞれについてAICの計算が終了したと判定すると(ステップSB16において「YES」)、算出したn個のハットAICのうち、最小値を示したときの候補閾値を取得するとともに、n個の正規分布モデルAICのうち最小値を示したときの候補閾値を取得し、これらの候補閾値とYi(i=1)とを対応付けて保存する(ステップSB18)。
【0051】
続いて、i=tsでなければ(ステップSB19において「NO」)、i=i+1とし(ステップSB20)、ステップSB13に戻り、以降の処理を実行する。これにより、信号データの2行目のデータY2について最小AICを示したときの候補閾値が求められる。そして、このような最小AICを示したときの候補閾値が信号データの全ての行(i=1〜ts)について求められると(ステップSB19において「YES」)、続いて、異常データについての最小AICの候補閾値の計算が行われ、その値が保存される。なお、異常データについては、上記信号データと同様であるため、説明を省略する。
【0052】
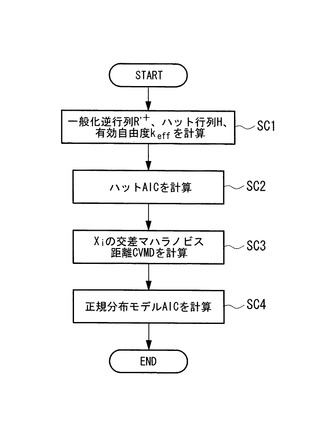
次に、上記ステップSB4で行われる単位空間データに関するハットAIC及び正規分布モデルAICの算出処理について図6を参照して説明する。
まず、図4のステップSB1で求めた相関行列R´を用いて相関行列R´の一般化逆行列R´+、ハット行列H、有効自由度keffを求める(ステップSC1)。一般化逆行列R´+、ハット行列H、有効自由度keffは以下の式で求められる。
【0053】
【数4】
【0054】
次に、ステップSC1で求めたハット行列Hと有効自由度keffとを用いて、ハットAICを計算する(ステップSC2)。ハットAICは以下の(9)式で求められる。(9)式において、nは特性項目数、Xiは単位空間から除いたデータである。
【0055】
【数5】
【0056】
次に、ステップSC1で計算した一般化逆行列R´+、有効自由度keffを用いて、図4のステップSB2において単位空間データから除いたXiの交差検証マハラノビス距離CVMDを計算する(ステップSC3)。交差検証マハラノビス距離CVMDは以下の(11)式で求められる。
【0057】
【数6】
【0058】
続いて、ステップSC3で求めた交差検証マハラノビス距離CVMDとステップSC1で求めた有効自由度keffとを用いて、正規分布モデルAICMを計算する(ステップSC4)。正規分布モデルAICは以下の(12)式で求められる。以下の(12)式において、|Σ|は相関行列R´の行列式の値である。
【0059】
【数7】
【0060】
以上の処理により、ハットAICと正規分布モデルAICの2つのAIC値が算出される。なお、信号データにおけるハットAICの算出については、式(10)におけるXiに代えてYiを用いればよい。また、正規分布モデルAICについては、ステップSC3において、信号データYiについてのマハラノビス距離MDを求め、上記(12)式における交差検証マハラノビス距離CVMDに代えてマハラノビス距離MDを用いればよい。異常データについても同様である。
【0061】
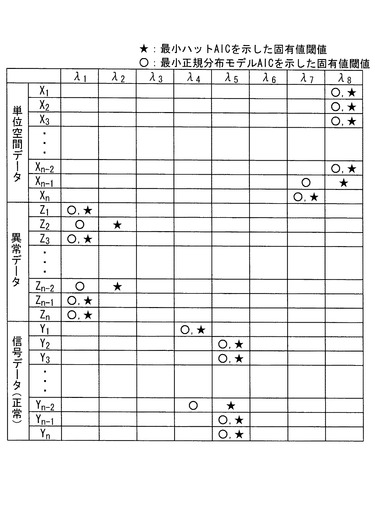
そして、図5に示したステップSB21までの処理が終わることにより、単位空間データXi(i=1〜n)、異常データZi(i=1〜n)、信号データYi(i=1〜n)についてそれぞれ最小AICを示したときの候補閾値λth_cが求められると、図5のステップSB22において、これらの候補閾値の分布に基づいて、固有値閾値の適正範囲を決定する。
図7は、固有値閾値の適正範囲の決定方法の概念を説明するための図である。図7において、○は各Xi、Zi、Yiにおいて最小正規分布モデルAICを示したときの候補閾値、★はXi、Zi、Yiにおいて最小ハットAICを示したときの候補閾値を示している。
【0062】
ここで、単位空間の各データ点Xi(i=1〜n)については、単位空間に属すると判定される必要がある。この条件を満たすためには、固有値閾値は、最小AICを示した候補閾値のうち、最大の候補閾値以上に設定する必要がある。そうすると、固有値閾値は、λ7よりも大きい値に設定する必要がある。
【0063】
次に、異常データの各データ点Zi(i=1〜n)については、単位空間と区別され、大きなマハラノビス距離を示す必要がある。この条件を満たすためには、固有値閾値は、最小AICを示した候補閾値のうち、最小の候補閾値以下に設定する必要がある。そうすると、固有値閾値は、λ2よりも小さい値に設定する必要がある。
【0064】
また、信号データの全てのデータ点Yiは検査対象が正常なときのデータであるため、単位空間に属すると判定される必要がある。この条件を満たすためには、固有値閾値は、最小AICを示した候補閾値のうち、最大の候補閾値以上に設定する必要がある。そうすると、固有値閾値は、λ4よりも大きい値に設定する必要がある。
【0065】
上記3つの検討結果から、固有値閾値λthの適正範囲は以下の範囲に決定される。
λ4<λth<λ2
【0066】
このようにして、固有値閾値λthの適正範囲が決定すると、例えば、この適正範囲と各固有値の情報が健全性評価装置10が備えるディスプレイ(出力装置15)に表示されることにより、ユーザに通知される。ユーザは、表示された適正範囲と固有値とに基づいて適正範囲内において固有値閾値を設定する。ユーザにより設定された固有値閾値λthの情報は入力装置14から入力される。
【0067】
このようにして、固有値閾値λthが決定されると、この固有値閾値λthを用いて、単位空間データの近似逆行列R−1´を求める(図3のステップSA5)。このとき、相関行列Rの固有値λがλ>λthならば、1/λとして近似逆行列に代入し、λ<λthならば0とする。この結果、例えば、以下の(13)式のような近似逆行列R−1´が求められる。
ここでの有効自由度keffは(13’)式である。
【0068】
【数8】
【0069】
このようにして近似逆行列R−1´が求められると、この近似逆行列R−1´は当該検査対象の識別情報と対応付けて補助記憶装置13に保存される(図3のステップSA6)。そして、当該検査対象の健全性評価の際には、補助記憶装置13からこの近似逆行列R−1´を読み出し、マハラノビス距離の算出に使用する。
【0070】
つまり、ヘリコプターのトランスミッションにおいては、上記固有値閾値の適正範囲を決定するために用いる正常データ(信号データ)を得た後も、トランスミッションの振動データは加速度センサによって継続的にモニタされ、その振動データがヘリコプターに搭載されたデータロガーに蓄積される。データロガーに蓄積されたデータは、日々ダウンロードされて、所定の外部記憶装置、または健全性評価装置10に入力されて蓄積される。
【0071】
健全性評価装置10は、入力された振動データを処理して各特性項目におけるサンプリングデータを計算し、信号データの行列を作成する。そして、この行列を規格化する。この処理は、上述と同様である。そして、入力された検査対象の識別情報に対応付けられている近似逆行列R−1´を読み出し、読み出した近似逆行列R−1´と、規格化後の信号データとを用いて、マハラノビス距離D2iを求める。MD値D2iは、以下の(14)式を用いて算出される。
【0072】
【数9】
【0073】
次に、算出したマハラノビス距離D2iと予め設定されている閾値(任意に設定可能な値であり、例えば、3)とをそれぞれ比較し、マハラノビス距離D2iが閾値よりも大きいか否かを判定する。この結果、閾値よりも大きいマハラノビス距離D2iが所定割合以上存在した場合には、検査対象であるトランスミッションに異常があるとして、異常信号を出力する。これにより、検査対象の異常がユーザに通知される。一方、健全性評価装置は、閾値を超えるマハラノビス距離D2iが所定割合以下であった場合には、検査対象の状態は正常であると判断し、その旨の通知を行う。
【0074】
このように、本実施形態に係る健全性評価装置10においては、図2に示した歯車試験装置において取得した正常データ(単位空間データ)及び異常データを補助記憶装置13に記憶しておく。そして、ヘリコプターに搭載されたトランスミッションがメンテナンスなどにより新品と取り換えられた場合には、この新品のトランスミッションについて一定期間にわたり正常データを取得し、この正常データと補助記憶装置13に記憶されている単位空間データ及び異常データを用いて上述した近似逆行列が求められる。この近似逆行列は該トランスミッションの識別情報と対応付けられて補助記憶装置13に記憶され、以降、このトランスミッションの健全性評価の度、例えば、毎日の飛行の後に、補助記憶装置13から読み出されてマハラノビス距離の算出に用いられる。
そして、このように、近似逆行列を検査対象である各トランスミッションの識別情報と対応付けて記憶しておくことにより、複数の検査対象について健全性を評価する場合でも、それぞれの検査対象に適合した近似逆行列を用いて健全性評価を可能とすることができる。これにより、個体差によるマハラノビス距離の誤差を低減することができる。
【0075】
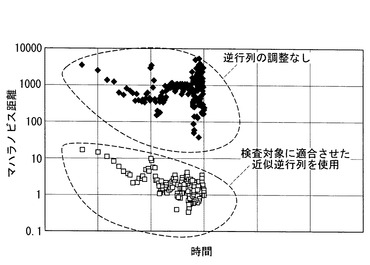
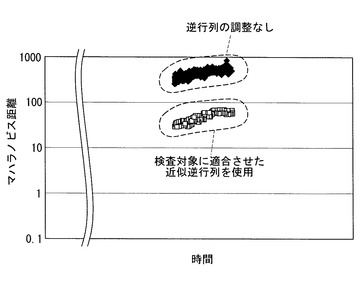
図8、図9は本発明の一実施形態に係る健全性評価装置10の効果を示した図である。
図8は検査対象の正常データについて、調整前の単位空間の逆行列を使用して算出したマハラノビス距離と、検査対象に適合するように調整が行われた単位空間の逆行列を使用して算出したマハラノビス距離とを比較して示した図である。図8に示すように、逆行列の調整前においては、正常データであるにもかかわらずマハラノビス距離が1から乖離した値を示しているが、調整後はマハラノビス距離が1付近に分散しており、信頼性の高いマハラノビス距離が得られていることがわかる。
また、図9は異常発生直前のマハラノビス距離の変化を比較して示した図である。調整前の単位空間の逆行列を使用して算出したマハラノビス距離データと同様に、検査対象に適合するように調整が行われた単位空間の逆行列を使用した場合でも、異常時のマハラノビス距離データは十分大きな値を示していることがわかるので、調整後でも異常検出を適切に実施できる。
このように、信頼性の高いマハラノビス距離を算出することにより、適切な時期に検査対象の修理や新品との交換を実施できることがわかる。
【0076】
以上、説明してきたように、本実施形態に係る健全性評価装置及びその方法並びにプログラムによれば、単位空間データ、異常データ及び正常と判断できる機器の信号データとを用意し、これらの各データにおいて情報量規準が最小となる候補閾値を求め、この候補閾値の分布から、正常と判断できる機器の信号データが単位空間データに属し、かつ、異常データとは区別されるような固有値閾値の範囲を求め、この範囲において決定された固有値閾値に基づいて導出された近似逆行列を用いてマハラノビス距離を算出する。このように、相関行列の逆行列を検査対象であるヘリコプターのトランスミッションに適合させるので、単位空間を構成する特性項目の間に強い相関がある(相関係数の絶対値が1に近い)場合や、単位空間を構成する特性項目の個数よりも単位空間のデータ数が少ない場合であっても、信頼性の高いマハラノビス距離を算出することができる。また、検査対象(ヘリコプターのトランスミッション)自身の正常データを用いて逆行列を適合化させるので、個体差による誤差を解消でき、定量的に健全性評価を行うことが可能となる。
【0077】
また、一般的に、マハラノビス距離を算出する場合、その評価対象の正常データを用いて単位空間の逆行列を求める。この場合、逆行列を得るためには、ある程度まとまった正常データ個数が必要となるため、この間はマハラノビス距離による異常検出が行えないこととなり、機器の初期故障を検出することが困難となる。このことは、機器の初期故障発生確率が高いことから重大な問題になり得る。この点、本実施形態に係る健全性評価装置及びその方法並びにプログラムによれば、健全性評価の対象となる機器から単位空間を定義するための正常データを得る必要がなく、予め取得していた単位空間の逆行列を評価対象の機器に合わせ込むことによりマハラノビス距離による異常判定を行うので、比較的早期から異常検出を開始することができる。これにより、初期故障を発見することができ、機器の異常故障検出を効果的に実施できる。
【0078】
なお、本実施形態では、単位空間を定義するための正常データと、異常データと、信号データとの関係から固有値閾値を決定していたが、異常データを使用せずに、正常データと信号データとによって、固有値閾値を決定することとしてもよい。この場合、図7に示したような単位空間データと信号データ(正常)の2条件のみの最小AICの分布を見て、信号データ(正常)の最小AICのうち最大となる固有値閾値を見つけ、この固有値閾値を適用した近似逆行列を用いて、マハラノビス距離を算出し、異常検出を行うこととしても良い。この場合、異常データとの比較はしていないが、少なくとも正常と判断しなければならないデータについては、正常なマハラノビス距離を示すような近似逆行列を作成することで、健全性評価の対象機器における初期動作中に信頼性の高いマハラノビス距離を用いて異常検出を行うことが可能となる。
【0079】
また、本実施形態において、異常検出をある程度の期間行うことにより、自身の正常データが、単位空間を定義するのに十分なデータ個数蓄積された場合には、自身の正常データによって単位空間を定義して逆行列を求め、これを用いてマハラノビス距離を算出し、異常検出を行うこととしてもよい。このように、マハラノビス距離を算出するのに採用する逆行列を途中で切り換えることにより、健全性評価の対象機器の正常データが十分に蓄積された後においては、より一層信頼性の高いマハラノビス距離を求めることができる。
【0080】
なお、本実施形態では、固有値閾値よりも小さい固有値については、値をゼロに置換して近似逆行列を求めることとしたが、これに代えて、例えば、上記(6)式を用いて近似逆行列R−1´を求めることとしてもよい。
【符号の説明】
【0081】
10 健全性評価装置
11 CPU
12 主記憶装置
13 補助記憶装置
14 入力装置
15 出力装置
16 通信装置
58,59 加速度センサ
【技術分野】
【0001】
本発明は、マハラノビス・タグチメソッド(以下「MT法」という。)を用いて検査対象である機器の健全性を評価する健全性評価装置及びその方法並びにプログラムに関するものである。
【背景技術】
【0002】
従来、機器の健全性を評価する際に、MT法を適用し、マハラノビス距離(MD値)に基づいて異常を検出する方法が提案されている(例えば、特許文献1参照)。
MT法は、正常データの集団である単位空間を定義し、この単位空間を用いて現在状態において取得した検査対象の信号データのマハラノビス距離を算出し、算出したマハラノビス距離に基づいて検査対象の異常を判断するものである。マハラノビス距離が大きい場合は、正常データの集団である母集団から乖離していることなり、何らかの特性値に異常が発生していると評価することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−279056号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
マハラノビス距離の算出は、単位空間から計算される相関行列の逆行列が用いられるが、相関行列の性質によっては逆行列が計算できない場合がある。例えば、単位空間を構成する特性項目の間に強い相関がある(相関係数の絶対値が1に近い)場合や、単位空間を構成する特性項目の個数よりも単位空間のデータ数が少ない場合には、適切な相関行列の逆行列を得ることができず、マハラノビス距離を算出することができないという問題があった。
【0005】
本発明は、このような事情に鑑みてなされたものであって、検査対象に適合した相関行列の逆行列を得ることにより信頼性の高いマハラノビス距離を算出することのできる健全性評価装置及びその方法並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明は以下の手段を採用する。
本発明は、マハラノビス距離を用いて機器の健全性評価を行う健全性評価装置であって、単位空間を定義するための単位空間データと、健全性評価の対象となる前記機器から取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとを記憶する第1記憶手段と、前記単位空間データの相関行列を固有値分解する固有値分解手段と、固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定手段と、前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出手段と、前記近似逆行列を記憶する第2記憶手段と、前記検査対象の健全性を評価するための検査データが入力された場合に、前記第2記憶手段から前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算手段とを有し、前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、前記閾値適正範囲決定手段は、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を求める健全性評価装置を提供する。
【0007】
本発明によれば、単位空間データ及び正常と判断できる機器の信号データとを用意し、これらの各データにおいて情報量規準が最小となる固有値の候補閾値を求め、この候補閾値の分布から、正常と判断できる機器の信号データが単位空間データに属するような固有値閾値の範囲を求め、この範囲において決定された固有値閾値に基づいて導出された近似逆行列を用いてマハラノビス距離を算出する。このように、相関行列の逆行列を検査対象である機器に適合させるので、単位空間を構成する特性項目の間に強い相関がある(相関係数の絶対値が1に近い)場合や、単位空間を構成する特性項目の個数よりも単位空間のデータ数が少ない場合であっても、信頼性の高いマハラノビス距離を算出することができる。また、検査対象となる機器の正常データを用いて逆行列を適合化させるので、個体差による誤差を解消でき、定量的に健全性評価を行うことが可能となる。
すなわち、信頼性の高いマハラノビス距離を算出するためには、特性項目数が単位空間データ数よりも多い場合などに、ノイズではない独立した主成分ベクトル(固有値)の個数を与える明確な指標が必要となる。本発明では、この指標として情報量規準を導入し、この情報量基準が最小となる条件が妥当な条件とみなしている。
この情報量規準については、例えば、マハラノビス距離は単位空間に属するデータが多変量正規分布に従うという前提から計算されるため、多変量正規分布モデル(後述する実施形態に係る「正規分布モデルAIC」に相当する)を採用するとよい。
また、上記多変量正規分布モデルには、マハラノビス距離そのものが含まれることから、数値誤差でマハラノビス距離が負になる場合には情報量規準の値が定義できず判定が不可能となる。そこで、数値誤差を評価する情報量規準、例えば、観測値から予測値を与える射影行列(ハット行列)を用いたハットAICなどを組み合わせて用いるとよい。
また、例えば、上記近似逆行列算出手段は、固有値閾値以下の固有値をゼロまたはゼロに近い所定の値に置換して、相関行列の近似逆行列を計算することとしてもよい。
【0008】
上記健全性評価装置において、前記第1記憶手段には、前記単位空間において異常を定義するための異常データが記憶されており、前記異常データの行列は、行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、前記閾値適正範囲決定手段は、前記異常データの行列について、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、前記比較データが前記単位空間に属するとともに、前記比較データが前記異常データと区別される固有値閾値の適正範囲を求めることとしてもよい。
【0009】
このように、異常データについても事前に用意し、異常データにおいて情報量規準が最小となる固有値の候補閾値を求め、この候補閾値の分布から、正常と判断できる機器の信号データが異常データとは区別されるような固有値閾値の範囲を求めることとしてもよい。これにより、更に信頼性の高いマハラノビス距離を算出することができる。
【0010】
上記健全性評価装置において、前記閾値適正範囲決定手段は、 前記閾値適正範囲決定手段は、前記単位空間については各データコードのそれぞれについて、計算対象の行を除いた残りのデータを用いて相関行列を求め、候補閾値の値を前記固有値分解手段により求められた固有値の範囲内で随時更新しながら、前記計算対象のデータコードに対応する行または列を除いた相関行列及び前記計算対象のデータコードに対応する行または列の情報を用いて情報量規準を計算し、計算した複数の情報量規準の中で最小値を示したときの候補閾値と前記計算対象のデータコードに対応する行または列とを対応付けて保存することとしてもよい。
【0011】
情報量規準の計算に用いる相関行列に検査したいデータ(例えば、計算対象のデータコード)が含まれる場合は、そのデータのマハラノビス距離が小さい値となったり、異常なハット行列であっても同じデータに写像されるおそれがある。そこで、交差検証法(Cross Validation)を用いて検査したい単位空間データを除いて相関行列を計算し、この相関行列と検査したいデータとから情報量規準を計算する。これにより、データのマハラノビス距離が小さい値となる、異常なハット行列であっても同じデータに写像されるなどといった不都合を解消することができ、一定の精度で情報量規準の値を求めることが可能となる。
【0012】
本発明は、マハラノビス距離を用いて機器の健全性評価を行う健全性評価方法であって、単位空間を定義するための単位空間データと、健全性評価の対象となる前記機器から取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとが記憶された記憶手段から該データを読み出すデータ読み出し工程と、前記単位空間データの相関行列を固有値分解する固有値分解工程と、固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定工程と、前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出工程と、前記近似逆行列を記憶する記憶工程と、前記検査対象の健全性を評価するための検査データが入力された場合に、記憶していた前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算工程とを有し、前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、前記閾値適正範囲決定工程は、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を決定する健全性評価方法を提供する。
【0013】
本発明は、マハラノビス距離を用いた機器の健全性評価をコンピュータに実行させるための健全性評価プログラムであって、単位空間を定義するための単位空間データと健全性評価の対象となる前記機器から取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとが記憶された記憶手段から該データを読み出すデータ読み出しステップと、前記単位空間データの相関行列を固有値分解する固有値分解ステップと、固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定ステップと、前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出ステップと、前記近似逆行列を記憶する記憶ステップと、前記検査対象の健全性を評価するための検査データが入力された場合に、記憶していた前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算ステップとを有し、前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、前記閾値適正範囲決定ステップは、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を決定する健全性評価プログラムを提供する。
【0014】
本発明は、マハラノビス距離を用いてヘリコプターのトランスミッションの健全性評価を行う健全性評価装置であって、単位空間を定義するための単位空間データと、健全性評価の対象となる前記トランスミッションから取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとを記憶する第1記憶手段と、前記単位空間データの相関行列を固有値分解する固有値分解手段と、固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定手段と、前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出手段と、前記近似逆行列を前記検査対象のトランスミッションの識別情報と対応付けて記憶する第2記憶手段と、前記検査対象となるトランスミッションの識別情報と該トランスミッションの健全性を評価するための検査データとが入力された場合に、前記第2記憶手段から前記トランスミッションの識別情報に対応付けられた前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算手段とを有し、前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、前記閾値適正範囲決定手段は、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を求める健全性評価装置を提供する。
【発明の効果】
【0015】
本発明によれば、信頼性の高いマハラノビス距離を算出することができるという効果を奏する。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施形態に係る健全性評価装置のハードウェア構成の一例を示した図である。
【図2】単位空間データ及び異常データを取得するために使用した歯車試験装置の概略構成を示した図である。
【図3】本発明の一実施形態に係る健全性評価装置により行われる近似逆行列導出処理の処理手順を示したフローチャートである。
【図4】本発明の一実施形態に係る健全性評価装置により行われる固有値閾値の適正範囲決定処理の処理手順を示したフローチャートである。
【図5】本発明の一実施形態に係る健全性評価装置により行われる固有値閾値の適正範囲決定処理の処理手順を示したフローチャートである。
【図6】単位空間データに関するハットAIC及び正規分布モデルAICの算出処理の処理手順を示したフローチャートである。
【図7】固有値閾値の適正範囲の決定方法の概念を説明するための図である。
【図8】本発明の一実施形態に係る健全性評価装置の効果を示した図である。
【図9】本発明の一実施形態に係る健全性評価装置の効果を示した図である。
【発明を実施するための形態】
【0017】
以下に、本発明に係る健全性評価装置及びその方法並びにプログラムをヘリコプターのトランスミッションの健全性評価に適用した場合の一実施形態について、図面を参照して説明する。
【0018】
図1は、本発明の一実施形態に係る健全性評価装置10のハードウェア構成の一例を示した図である。図1に示すように、健全性評価装置10は、コンピュータ装置であり、CPU(中央演算処理装置)11、主記憶装置12、ハードディスクなどの補助記憶装置13、データを入力するための入力装置14、及びディスプレイやプリンタなどの出力装置15、外部との通信を行う通信装置16などで構成されている。
補助記憶装置13には、各種プログラム(例えば、健全性評価プログラム)が格納されており、CPU11が補助記憶装置13から主記憶装置12にプログラムを読み出し、実行することにより後述する種々の処理を実現させる。
【0019】
まず、検査対象であるヘリコプターのトランスミッションの健全性を評価するに当たり、単位空間を定義するための単位空間データと、該単位空間において異常を定義するための異常データとを事前に取得する。
しかし、ここでは本発明の概念説明を簡単化するため、複雑なトランスミッションそのものではなく、トランスミッションの構成要素だけ(一部の歯車)を抜き出した歯車試験装置で実施形態を説明するが、本発明の概念は複雑なトランスミッション実物にも容易に適用可能である。トランスミッション実物の場合は、さらに複雑な装置構成・より多くのセンサの設置・より多くの信号を扱うが、当業者であれば、以下の説明から容易に実際のトランスミッションにも適用することが可能である。
【0020】
本実施形態では、例えば、図2に示すような歯車試験装置を用意し、この歯車試験装置を用いて事前試験を行い、正常時のデータと異常時のデータとを取得する。図2に示される歯車試験装置の外形寸法は試験機材に合わせた形状とし、歯車精度はヘリコプター用のトランスミッション相当とされている。また、図2の歯車試験装置とは異なり、格段に複雑なトランスミッション実物への本発明の適用法として、例えば、ヘリコプターに搭載されるトランスミッションと同一の供試体を用いて正常データおよび異常データを取得することとしてもよい。ヘリコプターに使用されるトランスミッションと同一の供試体を用いて正常データおよび異常データを取得することで、トランスミッションに適用可能な正常データおよび異常データを取得することができる。
【0021】
歯車試験装置において、試験対象として駆動歯車51、従動歯車52の2つを用いる。駆動歯車51及び従動歯車52は、シャフト53a、53bによって一対の動力循環歯車54に連結されている。また、動力循環歯車54には、モータ55が連結されている。シャフト53aにおいて、動力循環歯車54と駆動歯車51との間には、固定軸継手56が設けられている。駆動歯車51及び従動歯車52を収容するハウジング57には、2つの加速度センサ58、59が設けられている。加速度センサ58は、軸方向(図中のx方向)における振動信号を検出するためのセンサであり、加速度センサ59は軸に垂直な方向(図中のz方向、以下「縦方向」という。)における振動信号を検出するためのセンサである。なお、ここでは、2つの加速度センサ58、59を用いて振動信号を取得することとしたが、センサの個数については限定されない。
【0022】
このような構成を備える歯車試験装置において、モータ55が回転することにより、そのトルクが駆動歯車51に伝達されて駆動歯車51が回転し、駆動歯車51の回転に伴い従動歯車52が回転させられる。回転したときの振動は、加速度センサ58、59により検出され、この振動データが生データとしてデータロガー(図示略)に記録される。
正常時の試験では、例えば、モータトルク及びモータ回転数は一定に制御される。
異常時の試験では、例えば、人工的に歯車に傷をつけ、この状態にてデータを取得する。
【0023】
上記試験においてデータロガーに記録された正常時の生データ、異常時の生データは、健全性評価装置10に入力される。健全性評価装置10は、これら入力データを用いて、所定の時間間隔毎の平均値、分散、標準偏差、実効値、波形率、波効率、衝撃指数、変動率、歪度、尖度、噛合周波数成分とそのサイドバンド周波数成分及びシャフト回転周波数成分を計算する。
平均値、分散、標準偏差、実効値、波形率、波効率、衝撃指数、変動率、歪度、尖度の計算式を以下の表1に示す。ここで、表1におけるxiは、以下の数値である。
【0024】
xi=(元データ−元データの平均値)の絶対値
【0025】
また、上記平均値、分散、標準偏差、実効値、波形率、波効率、衝撃指数、変動率、歪度、尖度、噛合周波数成分とそのサイドバンド周波数成分及びシャフト回転周波数成分のそれぞれを特性項目と定義する。
【0026】
【表1】
【0027】
上記算出結果は、単位空間データ、異常データとして、補助記憶装置13に記憶される。
【0028】
次に、ヘリコプターのトランスミッションの健全性評価を行う場合、検査対象となるトランスミッションに適合するように、マハラノビス距離を算出するのに用いられる単位空間の逆行列を修正する必要がある。
例えば、マハラノビス距離による健全性評価を行う場合、検査対象となる機器の正常データ群を取得し、その正常データの集合を用いて単位空間を定義するのであれば、単位空間は自身のデータを元に定義されるため個体差による不都合は生じない。
【0029】
しかしながら、本実施形態では、図2の歯車試験装置を用いて取得した正常データを単位空間データとして用いるため、単位空間データの逆行列をそのまま使用してマハラノビス距離を算出すると、個体差によるマハラノビス距離のばらつきが生じ、検査対象によっては、正常であるにもかかわらずマハラノビス距離が大きくなってしまい、異常と判断されてしまうおそれがある。
【0030】
また、上記個体差の問題に加えて、例えば、単位空間を構成する特性項目の間に強い相関がある(相関係数の絶対値が1に近い)場合や、単位空間を構成する特性項目の個数よりも単位空間のデータ数が少ない場合には、適切な相関行列の逆行列を得ることができず、マハラノビス距離を算出することができないという問題もある。
そこで、上記不具合を解消するために、検査対象の健全性評価を行う事前準備として、単位空間データの相関行列の逆行列を該検査対象に適合させた近似逆行列を求める。以下、近似逆行列の導出方法について説明する。
【0031】
まず、検査対象であるヘリコプターのトランスミッションの正常データを取得する。例えば、健全性評価を行うトランスミッションの使用初期に得られた振動データを正常データとして取得する。一般的に、トランスミッションをヘリコプターに搭載する際、そのトランスミッションが正常であることを確認した上で搭載するため、使用初期における振動データは正常なデータであるとみなすことができる。
【0032】
振動データは、上記試験と同様に、ヘリコプターのトランスミッションに歯車の軸方向の振動を検出する加速度センサと、縦方向の振動を検出する加速度センサを設置し、これらの加速度センサによって得る。振動データはヘリコプターの飛行中に得られるデータであるため、例えば、ヘリコプターにデータロガーなどの記憶装置を設置し、飛行中に測定された振動データを保存しておく。そして、着陸後にデータロガーに蓄積された振動データを健全性評価装置10に入力する。
【0033】
健全性評価装置10は、データロガーから正常データであるとみなせる振動データの生データが入力されると、事前試験と同様の手法によって、所定の時間間隔毎の平均値、分散などの各特性項目のデータを算出し、算出結果を検査対象の正常データ(比較データ)として補助記憶装置13に記憶する。
【0034】
これにより、補助記憶装置13には、歯車試験装置によって得た単位空間データ、異常データ、及び検査対象の正常データ(以下「信号データ」という。)が記憶される。そして、これらのデータを用いて近似逆行列の作成処理が実行される。
【0035】
図3は、本実施形態に係る健全性評価装置により行われる近似逆行列導出処理の処理手順を示したフローチャートである。
まず、補助記憶装置13から単位空間データ、異常データ、信号データ(比較データ)を読み出し、これらを行列で表わすとともに、それぞれ規格化処理を行う(図3のステップSA1)。
【0036】
例えば、特性項目数をn、各特性項目のデータ数をtとすると、この行列はt行n列の行列として示すことができる。例えば、200種の特性項目において、1分間隔で10時間分のデータ数を取得した場合は、600行(10時間×60分=600分)、200列の行列となる。なお、単位空間などの行列作成については、例えば、特開2009−288100号公報に詳述されているため、詳細説明は省略する。
【0037】
次に、行と列とによって特定される特性値xijを以下の(1)式、(2)式に基づいて算出した平均値mj及び標準偏差σjを用いて規格化する処理を行う。単位空間データの特性値xijの規格化後の値は、正規格値Xijとして表され、以下の(3)式で求められる。
ここで、iは行を、jは列を示している。すなわち、xiは、i行目の全ての特性値、すなわち、同じ時間に得られた各特性項目のデータの集合体を意味し、yjは、所定の特性項目に係る全てのデータを意味し、xijは所定の特性項目において所定の時間に得られたデータを意味する。
【0038】
【数1】
【0039】
このように、データを規格化することにより、異なった特性項目間(計測物理量間)の特性値を公平に扱うことが可能となる。
異常データ、信号データについても同様の演算を行うことにより規格化を行う。規格化後の異常データの特性値をZij、信号データの特性値をYijとする。
なお、以降の説明において、単位空間データ、異常データ、信号データは、それぞれ規格化後の特性値からなるデータセットを意味する。
【0040】
次に、単位空間データの特性値Xijを用いて、相関行列R=(rij)を計算する(図3のステップSA2)。相関行列Rは以下の(4)式を用いて導出される。相関行列は対角成分が1であるn次行列となる。
【0041】
【数2】
【0042】
次に、相関行列Rを固有値分解し、固有値λ1,λ2,・・・,λnを得、これら固有値λ1,λ2,・・・,λnを配列Wとして保存する(ステップSA3)。固有値分解した相関行列Rは以下の(5)式で表わされる。ここで、固有値は、大きい順に並べられている。すなわち、各固有値はλ1>λ2>・・・>λnの関係にある。
【0043】
【数3】
【0044】
上記(5)式において、Vは各固有値に対応する固有ベクトルを並べた直交行列、V´はVの転置行列である。
【0045】
次に、固有値閾値の適正範囲を決定する(ステップSA4)。図4及び図5は、固有値閾値の適正範囲決定処理の処理手順を示したフローチャートである。
【0046】
まず、初期設定としてi=1,k=1に設定する(図4のステップSB1)。次に、単位空間データの中からXiのデータ、すなわち1行目のデータを除いた残りの単位空間データを用いて相関行列R´を計算する(ステップSB2)。次に、配列Wのうち固有値λkを候補閾値λth_cに設定する(ステップSB3)。続いて、候補閾値をλth_c=λkに設定したときの情報量規準(AIC:Akaike's Information Criterion)を求める(ステップSB4)。ここでは、ハットAICと正規分布モデルAICの2つのAICを求める。なお、具体的な算出処理については後述する。
【0047】
続いて、ステップSB4で計算したAICをλth_c=λk(k=1)と対応付けて保存し(ステップSB5)、k=nでない場合、すなわち、候補閾値として配列Wとして記憶されている全ての固有値が設定されていない場合には(ステップSB6において「NO」)、k=k+1と設定して(ステップSB7)、ステップSB3に戻り、次の候補閾値λth_c=λk(k=2)について、同様の処理を行う。そして、上記ステップSB3からステップSB7の処理を繰り返し実施し、ステップSB6においてk=n、すなわち、固有値λ1からλnまでのそれぞれについてAICの計算が終了したと判断すると(ステップSB6において「YES」)、算出したn個のハットAICのうち、最小値を示したときの候補閾値を取得するとともに、n個の正規分布モデルAICのうち最小値を示したときの候補閾値を取得し、これらの候補閾値と単位空間データから除いたXi(i=1)とを対応付けて保存する(ステップSB8)。
【0048】
続いて、i=tでなければ、すなわち、単位空間データの全ての行について上記処理が行われていない場合には(ステップSB9において「NO」)、i=i+1とし(ステップSB10)、ステップSB2に戻り、以降の処理を実行する。これにより、単位空間データから2行目のデータを除いた残りの単位空間データを用いて相関行列R´が計算され、この相関行列R´について、最小AICを示したときの候補閾値が求められる。そして、このような最小AICを示したときの候補閾値が単位空間データの全ての行について求められると(ステップSB9において「YES」)、ステップSB11に移行し、信号データを対象とした処理に移行する。
【0049】
具体的には、初期設定としてi=1,k=1に設定し(図5のステップSB11)、全ての単位空間データを用いて相関行列Rを計算する(ステップSB12)。次に、配列Wのうち固有値λkを候補閾値λth_cに設定する(ステップSB13)。続いて、候補閾値をλth_c=λkに設定したときの信号データYiのAICを求める(ステップSB14)。なお、信号データYiのAICの算出方法については後述する。
【0050】
続いて、計算したハットAIC、正規分布モデルAICをλth_c=λk(k=1)と対応付けて保存し(ステップSB15)、k=nでなければ(ステップSB16において「NO」)、k=k+1と設定して(ステップSB17)、ステップSB13に戻り、次の候補閾値λth=λ2について、同様の処理を行う。そして、上記ステップSB13からステップSB17の処理を繰り返し実施し、ステップSB16においてk=n、すなわち、固有値λ1からλnまでのそれぞれについてAICの計算が終了したと判定すると(ステップSB16において「YES」)、算出したn個のハットAICのうち、最小値を示したときの候補閾値を取得するとともに、n個の正規分布モデルAICのうち最小値を示したときの候補閾値を取得し、これらの候補閾値とYi(i=1)とを対応付けて保存する(ステップSB18)。
【0051】
続いて、i=tsでなければ(ステップSB19において「NO」)、i=i+1とし(ステップSB20)、ステップSB13に戻り、以降の処理を実行する。これにより、信号データの2行目のデータY2について最小AICを示したときの候補閾値が求められる。そして、このような最小AICを示したときの候補閾値が信号データの全ての行(i=1〜ts)について求められると(ステップSB19において「YES」)、続いて、異常データについての最小AICの候補閾値の計算が行われ、その値が保存される。なお、異常データについては、上記信号データと同様であるため、説明を省略する。
【0052】
次に、上記ステップSB4で行われる単位空間データに関するハットAIC及び正規分布モデルAICの算出処理について図6を参照して説明する。
まず、図4のステップSB1で求めた相関行列R´を用いて相関行列R´の一般化逆行列R´+、ハット行列H、有効自由度keffを求める(ステップSC1)。一般化逆行列R´+、ハット行列H、有効自由度keffは以下の式で求められる。
【0053】
【数4】
【0054】
次に、ステップSC1で求めたハット行列Hと有効自由度keffとを用いて、ハットAICを計算する(ステップSC2)。ハットAICは以下の(9)式で求められる。(9)式において、nは特性項目数、Xiは単位空間から除いたデータである。
【0055】
【数5】
【0056】
次に、ステップSC1で計算した一般化逆行列R´+、有効自由度keffを用いて、図4のステップSB2において単位空間データから除いたXiの交差検証マハラノビス距離CVMDを計算する(ステップSC3)。交差検証マハラノビス距離CVMDは以下の(11)式で求められる。
【0057】
【数6】
【0058】
続いて、ステップSC3で求めた交差検証マハラノビス距離CVMDとステップSC1で求めた有効自由度keffとを用いて、正規分布モデルAICMを計算する(ステップSC4)。正規分布モデルAICは以下の(12)式で求められる。以下の(12)式において、|Σ|は相関行列R´の行列式の値である。
【0059】
【数7】
【0060】
以上の処理により、ハットAICと正規分布モデルAICの2つのAIC値が算出される。なお、信号データにおけるハットAICの算出については、式(10)におけるXiに代えてYiを用いればよい。また、正規分布モデルAICについては、ステップSC3において、信号データYiについてのマハラノビス距離MDを求め、上記(12)式における交差検証マハラノビス距離CVMDに代えてマハラノビス距離MDを用いればよい。異常データについても同様である。
【0061】
そして、図5に示したステップSB21までの処理が終わることにより、単位空間データXi(i=1〜n)、異常データZi(i=1〜n)、信号データYi(i=1〜n)についてそれぞれ最小AICを示したときの候補閾値λth_cが求められると、図5のステップSB22において、これらの候補閾値の分布に基づいて、固有値閾値の適正範囲を決定する。
図7は、固有値閾値の適正範囲の決定方法の概念を説明するための図である。図7において、○は各Xi、Zi、Yiにおいて最小正規分布モデルAICを示したときの候補閾値、★はXi、Zi、Yiにおいて最小ハットAICを示したときの候補閾値を示している。
【0062】
ここで、単位空間の各データ点Xi(i=1〜n)については、単位空間に属すると判定される必要がある。この条件を満たすためには、固有値閾値は、最小AICを示した候補閾値のうち、最大の候補閾値以上に設定する必要がある。そうすると、固有値閾値は、λ7よりも大きい値に設定する必要がある。
【0063】
次に、異常データの各データ点Zi(i=1〜n)については、単位空間と区別され、大きなマハラノビス距離を示す必要がある。この条件を満たすためには、固有値閾値は、最小AICを示した候補閾値のうち、最小の候補閾値以下に設定する必要がある。そうすると、固有値閾値は、λ2よりも小さい値に設定する必要がある。
【0064】
また、信号データの全てのデータ点Yiは検査対象が正常なときのデータであるため、単位空間に属すると判定される必要がある。この条件を満たすためには、固有値閾値は、最小AICを示した候補閾値のうち、最大の候補閾値以上に設定する必要がある。そうすると、固有値閾値は、λ4よりも大きい値に設定する必要がある。
【0065】
上記3つの検討結果から、固有値閾値λthの適正範囲は以下の範囲に決定される。
λ4<λth<λ2
【0066】
このようにして、固有値閾値λthの適正範囲が決定すると、例えば、この適正範囲と各固有値の情報が健全性評価装置10が備えるディスプレイ(出力装置15)に表示されることにより、ユーザに通知される。ユーザは、表示された適正範囲と固有値とに基づいて適正範囲内において固有値閾値を設定する。ユーザにより設定された固有値閾値λthの情報は入力装置14から入力される。
【0067】
このようにして、固有値閾値λthが決定されると、この固有値閾値λthを用いて、単位空間データの近似逆行列R−1´を求める(図3のステップSA5)。このとき、相関行列Rの固有値λがλ>λthならば、1/λとして近似逆行列に代入し、λ<λthならば0とする。この結果、例えば、以下の(13)式のような近似逆行列R−1´が求められる。
ここでの有効自由度keffは(13’)式である。
【0068】
【数8】
【0069】
このようにして近似逆行列R−1´が求められると、この近似逆行列R−1´は当該検査対象の識別情報と対応付けて補助記憶装置13に保存される(図3のステップSA6)。そして、当該検査対象の健全性評価の際には、補助記憶装置13からこの近似逆行列R−1´を読み出し、マハラノビス距離の算出に使用する。
【0070】
つまり、ヘリコプターのトランスミッションにおいては、上記固有値閾値の適正範囲を決定するために用いる正常データ(信号データ)を得た後も、トランスミッションの振動データは加速度センサによって継続的にモニタされ、その振動データがヘリコプターに搭載されたデータロガーに蓄積される。データロガーに蓄積されたデータは、日々ダウンロードされて、所定の外部記憶装置、または健全性評価装置10に入力されて蓄積される。
【0071】
健全性評価装置10は、入力された振動データを処理して各特性項目におけるサンプリングデータを計算し、信号データの行列を作成する。そして、この行列を規格化する。この処理は、上述と同様である。そして、入力された検査対象の識別情報に対応付けられている近似逆行列R−1´を読み出し、読み出した近似逆行列R−1´と、規格化後の信号データとを用いて、マハラノビス距離D2iを求める。MD値D2iは、以下の(14)式を用いて算出される。
【0072】
【数9】
【0073】
次に、算出したマハラノビス距離D2iと予め設定されている閾値(任意に設定可能な値であり、例えば、3)とをそれぞれ比較し、マハラノビス距離D2iが閾値よりも大きいか否かを判定する。この結果、閾値よりも大きいマハラノビス距離D2iが所定割合以上存在した場合には、検査対象であるトランスミッションに異常があるとして、異常信号を出力する。これにより、検査対象の異常がユーザに通知される。一方、健全性評価装置は、閾値を超えるマハラノビス距離D2iが所定割合以下であった場合には、検査対象の状態は正常であると判断し、その旨の通知を行う。
【0074】
このように、本実施形態に係る健全性評価装置10においては、図2に示した歯車試験装置において取得した正常データ(単位空間データ)及び異常データを補助記憶装置13に記憶しておく。そして、ヘリコプターに搭載されたトランスミッションがメンテナンスなどにより新品と取り換えられた場合には、この新品のトランスミッションについて一定期間にわたり正常データを取得し、この正常データと補助記憶装置13に記憶されている単位空間データ及び異常データを用いて上述した近似逆行列が求められる。この近似逆行列は該トランスミッションの識別情報と対応付けられて補助記憶装置13に記憶され、以降、このトランスミッションの健全性評価の度、例えば、毎日の飛行の後に、補助記憶装置13から読み出されてマハラノビス距離の算出に用いられる。
そして、このように、近似逆行列を検査対象である各トランスミッションの識別情報と対応付けて記憶しておくことにより、複数の検査対象について健全性を評価する場合でも、それぞれの検査対象に適合した近似逆行列を用いて健全性評価を可能とすることができる。これにより、個体差によるマハラノビス距離の誤差を低減することができる。
【0075】
図8、図9は本発明の一実施形態に係る健全性評価装置10の効果を示した図である。
図8は検査対象の正常データについて、調整前の単位空間の逆行列を使用して算出したマハラノビス距離と、検査対象に適合するように調整が行われた単位空間の逆行列を使用して算出したマハラノビス距離とを比較して示した図である。図8に示すように、逆行列の調整前においては、正常データであるにもかかわらずマハラノビス距離が1から乖離した値を示しているが、調整後はマハラノビス距離が1付近に分散しており、信頼性の高いマハラノビス距離が得られていることがわかる。
また、図9は異常発生直前のマハラノビス距離の変化を比較して示した図である。調整前の単位空間の逆行列を使用して算出したマハラノビス距離データと同様に、検査対象に適合するように調整が行われた単位空間の逆行列を使用した場合でも、異常時のマハラノビス距離データは十分大きな値を示していることがわかるので、調整後でも異常検出を適切に実施できる。
このように、信頼性の高いマハラノビス距離を算出することにより、適切な時期に検査対象の修理や新品との交換を実施できることがわかる。
【0076】
以上、説明してきたように、本実施形態に係る健全性評価装置及びその方法並びにプログラムによれば、単位空間データ、異常データ及び正常と判断できる機器の信号データとを用意し、これらの各データにおいて情報量規準が最小となる候補閾値を求め、この候補閾値の分布から、正常と判断できる機器の信号データが単位空間データに属し、かつ、異常データとは区別されるような固有値閾値の範囲を求め、この範囲において決定された固有値閾値に基づいて導出された近似逆行列を用いてマハラノビス距離を算出する。このように、相関行列の逆行列を検査対象であるヘリコプターのトランスミッションに適合させるので、単位空間を構成する特性項目の間に強い相関がある(相関係数の絶対値が1に近い)場合や、単位空間を構成する特性項目の個数よりも単位空間のデータ数が少ない場合であっても、信頼性の高いマハラノビス距離を算出することができる。また、検査対象(ヘリコプターのトランスミッション)自身の正常データを用いて逆行列を適合化させるので、個体差による誤差を解消でき、定量的に健全性評価を行うことが可能となる。
【0077】
また、一般的に、マハラノビス距離を算出する場合、その評価対象の正常データを用いて単位空間の逆行列を求める。この場合、逆行列を得るためには、ある程度まとまった正常データ個数が必要となるため、この間はマハラノビス距離による異常検出が行えないこととなり、機器の初期故障を検出することが困難となる。このことは、機器の初期故障発生確率が高いことから重大な問題になり得る。この点、本実施形態に係る健全性評価装置及びその方法並びにプログラムによれば、健全性評価の対象となる機器から単位空間を定義するための正常データを得る必要がなく、予め取得していた単位空間の逆行列を評価対象の機器に合わせ込むことによりマハラノビス距離による異常判定を行うので、比較的早期から異常検出を開始することができる。これにより、初期故障を発見することができ、機器の異常故障検出を効果的に実施できる。
【0078】
なお、本実施形態では、単位空間を定義するための正常データと、異常データと、信号データとの関係から固有値閾値を決定していたが、異常データを使用せずに、正常データと信号データとによって、固有値閾値を決定することとしてもよい。この場合、図7に示したような単位空間データと信号データ(正常)の2条件のみの最小AICの分布を見て、信号データ(正常)の最小AICのうち最大となる固有値閾値を見つけ、この固有値閾値を適用した近似逆行列を用いて、マハラノビス距離を算出し、異常検出を行うこととしても良い。この場合、異常データとの比較はしていないが、少なくとも正常と判断しなければならないデータについては、正常なマハラノビス距離を示すような近似逆行列を作成することで、健全性評価の対象機器における初期動作中に信頼性の高いマハラノビス距離を用いて異常検出を行うことが可能となる。
【0079】
また、本実施形態において、異常検出をある程度の期間行うことにより、自身の正常データが、単位空間を定義するのに十分なデータ個数蓄積された場合には、自身の正常データによって単位空間を定義して逆行列を求め、これを用いてマハラノビス距離を算出し、異常検出を行うこととしてもよい。このように、マハラノビス距離を算出するのに採用する逆行列を途中で切り換えることにより、健全性評価の対象機器の正常データが十分に蓄積された後においては、より一層信頼性の高いマハラノビス距離を求めることができる。
【0080】
なお、本実施形態では、固有値閾値よりも小さい固有値については、値をゼロに置換して近似逆行列を求めることとしたが、これに代えて、例えば、上記(6)式を用いて近似逆行列R−1´を求めることとしてもよい。
【符号の説明】
【0081】
10 健全性評価装置
11 CPU
12 主記憶装置
13 補助記憶装置
14 入力装置
15 出力装置
16 通信装置
58,59 加速度センサ
【特許請求の範囲】
【請求項1】
マハラノビス距離を用いて機器の健全性評価を行う健全性評価装置であって、
単位空間を定義するための単位空間データと、健全性評価の対象となる前記機器から取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとを記憶する第1記憶手段と、
前記単位空間データの相関行列を固有値分解する固有値分解手段と、
固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定手段と、
前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出手段と、
前記近似逆行列を記憶する第2記憶手段と、
前記検査対象の健全性を評価するための検査データが入力された場合に、前記第2記憶手段から前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算手段と
を有し、
前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、
前記閾値適正範囲決定手段は、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を求める健全性評価装置。
【請求項2】
前記第1記憶手段には、前記単位空間において異常を定義するための異常データが記憶されており、前記異常データの行列は、行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、
前記閾値適正範囲決定手段は、前記異常データの行列について、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、前記比較データが前記単位空間に属するとともに、前記比較データが前記異常データと区別される固有値閾値の適正範囲を求める請求項1に記載の健全性評価装置。
【請求項3】
前記閾値適正範囲決定手段は、前記単位空間については各データコードのそれぞれについて、計算対象の行を除いた残りのデータを用いて相関行列を求め、候補閾値の値を前記固有値分解手段により求められた固有値の範囲内で随時更新しながら、前記計算対象のデータコードに対応する行または列を除いた相関行列及び前記計算対象のデータコードに対応する行または列の情報を用いて情報量規準を計算し、計算した複数の情報量規準の中で最小値を示したときの候補閾値と前記計算対象のデータコードに対応する行または列とを対応付けて保存する請求項1または請求項2に記載の健全性評価装置。
【請求項4】
マハラノビス距離を用いて機器の健全性評価を行う健全性評価方法であって、
単位空間を定義するための単位空間データと、健全性評価の対象となる前記機器から取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとが記憶された記憶手段から該データを読み出すデータ読み出し工程と、
前記単位空間データの相関行列を固有値分解する固有値分解工程と、
固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定工程と、
前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出工程と、
前記近似逆行列を記憶する記憶工程と、
前記検査対象の健全性を評価するための検査データが入力された場合に、記憶していた前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算工程と
を有し、
前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、
前記閾値適正範囲決定工程は、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を決定する健全性評価方法。
【請求項5】
マハラノビス距離を用いた機器の健全性評価をコンピュータに実行させるための健全性評価プログラムであって、
単位空間を定義するための単位空間データと健全性評価の対象となる前記機器から取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとが記憶された記憶手段から該データを読み出すデータ読み出しステップと、
前記単位空間データの相関行列を固有値分解する固有値分解ステップと、
固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定ステップと、
前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出ステップと、
前記近似逆行列を記憶する記憶ステップと、
前記検査対象の健全性を評価するための検査データが入力された場合に、記憶していた前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算ステップと
を有し、
前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、
前記閾値適正範囲決定ステップは、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を決定する健全性評価プログラム。
【請求項6】
マハラノビス距離を用いてヘリコプターのトランスミッションの健全性評価を行う健全性評価装置であって、
単位空間を定義するための単位空間データと、健全性評価の対象となる前記トランスミッションから取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとを記憶する第1記憶手段と、
前記単位空間データの相関行列を固有値分解する固有値分解手段と、
固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定手段と、
前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出手段と、
前記近似逆行列を前記検査対象のトランスミッションの識別情報と対応付けて記憶する第2記憶手段と、
前記検査対象となるトランスミッションの識別情報と該トランスミッションの健全性を評価するための検査データとが入力された場合に、前記第2記憶手段から前記トランスミッションの識別情報に対応付けられた前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算手段と
を有し、
前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、
前記閾値適正範囲決定手段は、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を求める健全性評価装置。
【請求項1】
マハラノビス距離を用いて機器の健全性評価を行う健全性評価装置であって、
単位空間を定義するための単位空間データと、健全性評価の対象となる前記機器から取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとを記憶する第1記憶手段と、
前記単位空間データの相関行列を固有値分解する固有値分解手段と、
固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定手段と、
前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出手段と、
前記近似逆行列を記憶する第2記憶手段と、
前記検査対象の健全性を評価するための検査データが入力された場合に、前記第2記憶手段から前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算手段と
を有し、
前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、
前記閾値適正範囲決定手段は、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を求める健全性評価装置。
【請求項2】
前記第1記憶手段には、前記単位空間において異常を定義するための異常データが記憶されており、前記異常データの行列は、行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、
前記閾値適正範囲決定手段は、前記異常データの行列について、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、前記比較データが前記単位空間に属するとともに、前記比較データが前記異常データと区別される固有値閾値の適正範囲を求める請求項1に記載の健全性評価装置。
【請求項3】
前記閾値適正範囲決定手段は、前記単位空間については各データコードのそれぞれについて、計算対象の行を除いた残りのデータを用いて相関行列を求め、候補閾値の値を前記固有値分解手段により求められた固有値の範囲内で随時更新しながら、前記計算対象のデータコードに対応する行または列を除いた相関行列及び前記計算対象のデータコードに対応する行または列の情報を用いて情報量規準を計算し、計算した複数の情報量規準の中で最小値を示したときの候補閾値と前記計算対象のデータコードに対応する行または列とを対応付けて保存する請求項1または請求項2に記載の健全性評価装置。
【請求項4】
マハラノビス距離を用いて機器の健全性評価を行う健全性評価方法であって、
単位空間を定義するための単位空間データと、健全性評価の対象となる前記機器から取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとが記憶された記憶手段から該データを読み出すデータ読み出し工程と、
前記単位空間データの相関行列を固有値分解する固有値分解工程と、
固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定工程と、
前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出工程と、
前記近似逆行列を記憶する記憶工程と、
前記検査対象の健全性を評価するための検査データが入力された場合に、記憶していた前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算工程と
を有し、
前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、
前記閾値適正範囲決定工程は、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を決定する健全性評価方法。
【請求項5】
マハラノビス距離を用いた機器の健全性評価をコンピュータに実行させるための健全性評価プログラムであって、
単位空間を定義するための単位空間データと健全性評価の対象となる前記機器から取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとが記憶された記憶手段から該データを読み出すデータ読み出しステップと、
前記単位空間データの相関行列を固有値分解する固有値分解ステップと、
固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定ステップと、
前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出ステップと、
前記近似逆行列を記憶する記憶ステップと、
前記検査対象の健全性を評価するための検査データが入力された場合に、記憶していた前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算ステップと
を有し、
前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、
前記閾値適正範囲決定ステップは、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を決定する健全性評価プログラム。
【請求項6】
マハラノビス距離を用いてヘリコプターのトランスミッションの健全性評価を行う健全性評価装置であって、
単位空間を定義するための単位空間データと、健全性評価の対象となる前記トランスミッションから取得されたデータであり、かつ、該単位空間に属すると判断できる比較データとを記憶する第1記憶手段と、
前記単位空間データの相関行列を固有値分解する固有値分解手段と、
固有値分解により得た複数の固有値のうち、マハラノビス距離算出に用いる固有値数を決定するための固有値閾値の適正範囲を求める閾値適正範囲決定手段と、
前記固有値閾値の適正範囲内で設定された固有値閾値以上の固有値を用いて、前記相関行列の近似逆行列を計算する近似逆行列算出手段と、
前記近似逆行列を前記検査対象のトランスミッションの識別情報と対応付けて記憶する第2記憶手段と、
前記検査対象となるトランスミッションの識別情報と該トランスミッションの健全性を評価するための検査データとが入力された場合に、前記第2記憶手段から前記トランスミッションの識別情報に対応付けられた前記近似逆行列を読み出し、読み出した前記近似逆行列を用いて前記検査データのマハラノビス距離を算出するマハラノビス距離計算手段と
を有し、
前記単位空間データの行列及び前記比較データの行列は、いずれも行および列のいずれか一方がデータレコードに対応し、他方が特性項目に対応する構造を持ち、
前記閾値適正範囲決定手段は、前記単位空間データの行列及び前記比較データの行列のそれぞれについて、前記データレコード毎に情報量規準の値が最小となる固有値の候補閾値を求め、該候補閾値の分布に基づいて、前記比較データが前記単位空間に属すると判定される固有値閾値の適正範囲を求める健全性評価装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−159298(P2012−159298A)
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願番号】特願2011−17091(P2011−17091)
【出願日】平成23年1月28日(2011.1.28)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願日】平成23年1月28日(2011.1.28)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]