
傾斜ローラ型物品回転式ベルトコンベヤ
平行に配列された2つのローラトップベルトを有したコンベヤベルトである。各ベルトは個別に制御可能であって、両ベルト上を搬送される物品を好ましい方位に回転させる。ベルトは、ベルト移動の方向に対して傾けられた軸を中心として回転するローラを有する。各ベルト上のローラは、両ベルトがベルト移動の方向に進行するに従い、被搬送物品を他方のベルトに向けると共に、ローラは、下側のベアリング表面に回転接触式に接触する。ローラの回転は、ローラ上を搬送される物品に力を加える。この力の1つの成分は、他方のベルトに向けられ、そしてもう1つの成分は、下流に向けられている。センサアレイは、物品のフットプリントを上流位置で検知すると共に、信号をコントローラへ送信する。このコントローラは、物品のサイズ及び方位を検知し、必要であれば選択的に一方又は他方のベルトを停止して、物品を回転させ、その方位を変化させる。
【発明の詳細な説明】
【技術分野】
【0001】
[背景]
本発明は、一般に動力駆動式コンベヤに関し、特に一対の平行なローラトップベルトの一方又は他方を選択的に停止させることによって、被搬送物品を回転させることが可能なコンベヤに関する。この場合、各ベルトは、物品を他方に対して傾斜状態で向けるように配置されたローラを有する。
【0002】
多くの搬送応用は、種々の形状及びサイズの被搬送物品が、下流処理又は検査のために、特定の方位で単一縦列に整列されることを必要とする。時折、コンベヤの幅又は処理場所の入口の幅は制限される。短軸及びより長い長軸を持つ概ね矩形のフットプリントを有した物品の場合、長軸や対角線は、コンベヤの制限された幅部分の寸法を超えてしまう。過大サイズの物品の長軸がコンベヤ上で方位付けされて、その長い軸がコンベヤの幅を横切ってしまう場合、物品はコンベヤの側壁間でジャム状態となる。このジャム状態を解放するために、手動介入がその後必要とされる。この結果、種々の形状及びサイズの物品を整列させると共に方位付けして、それらが幅制限されたコンベヤ区間でジャム状態にならないようにすることができるコンベヤに対する要求がある。
【0003】
[要約]
この要求及び他の要求は、発明の特徴を具体化したコンベヤによって満たされる。このコンベヤは、互いに平行に配置されたベルトループの形態の第1及び第2のコンベヤベルトを備える。各ベルトは、幅方向に第1の側部から第2の側部へ且つ厚さ方向に外面から内面へ延びる。第1のコンベヤベルトの第1の側部は、第2のコンベヤベルトの第2の側部に隣接する。平行ループの一部はキャリーウエイを規定し、物品は、このキャリーウエイに沿って、キャリーウエイの上流端から下流端へ、ベルトの外面上を搬送される。第1のドライブは、第1のベルトに係合して、それをキャリーウエイに沿ってベルト移動の方向に進行させる。第2のドライブは、同様に第2のコンベヤベルトに係合する。各ベルトは、その外面及び内面を超えて突出した複数のローラを有する。少なくとも1つのベアリング表面は、キャリーウエイの一部に沿って2つのベルトの下にある。ローラは、ベルトの内面を超えて突出してベアリング表面と回転接触する。この回転接触は、ベルトがベルト移動の方向に進行するに従い、ローラを回転させる。第1のベルト内のローラは、ベルト移動の方向に対して傾けられた第1の軸を中心として回転する。このようにして、ローラは、物品を下流に且つ第2のベルトに向けて追い出すように指向されたローラ上を搬送される物品に対し、第1の力を加える。第2のベルト内のローラは、第2の軸を中心として回転して、第2の力を加え、被搬送物品を下流に且つ第1のコンベヤベルトに向ける。コントローラは、ドライブの一方又は双方に結合されて、ベルトのいずれかを、他方が継続して進行する間に、選択的に停止する。
【0004】
発明の特徴を具体化したコンベヤのもう1つのバージョンは、キャリーウエイを備える。このキャリーウエイは、その上流及び下流端間に第1及び第2のローラトップコンベヤベルトを平行に有する。物品は、2つのベルト内のローラ上を搬送される。ベアリング表面は、キャリーウエイの一部に沿ってローラトップベルトの下にある。ベルト内のローラは、突出部を有する。この突出部は、キャリーウエイに沿って搬送される物品を支持すると共に、ベルトがキャリーウエイに沿ってベルト移動の方向に進行するに従いベアリング表面と回転接触式に係合する。第1のコンベヤベルト内のローラは、第1のコンベヤベルトが進行するに従い、被搬送物品を第2のコンベヤベルトに向けて追い出すように方位付けされた第1の軸を中心として回転するように配列されていると共に、これらローラは、ベアリング表面と接触している。同様に、第2のベルト内のローラは、被搬送物品を第1のコンベヤベルトに向けて追い出すように方位付けされた第2の軸を中心として回転するように配列されている。第1及び第2のドライブは、第1及び第2のベルトに結合されて、ベルトのいずれかの進行を、他方が継続して進行しているときに、選択的に停止する。
【0005】
物品回転式コンベヤのもう1つのバージョンは、コンベヤ配置を備える。このコンベヤ配置は、上流端から下流端へ延びると共に、ギャップの反対側に平行に位置決めされた一対の個別駆動型コンベヤベルトを有する。各コンベヤベルトは、複数のローラを有し、各ローラは頂部及び底部のベルト表面を超えて延びる突出部を有する。各ローラは、ローラの上流位置でギャップと交差する軸を支えとして回転可能である。このコンベヤ配置は、キャリーウエイを規定し、物品は、ベルトが上流端から下流端へ進行するに従って、キャリーウエイに沿ってローラ上を搬送される。キャリーウエイは、底部ベルト表面を超えて延びたローラに接触するベアリング表面によって下側に配置された活性部分を有する。この接触は、コンベヤベルトが進行するに従ってローラを回転させる。キャリーウエイはまた、ローラがベアリング表面と接触しない不活性部分を有する。コンベヤ配置に結合されたコントローラは、被搬送物品がキャリーウエイの活性部分にあるときは一対のコンベヤベルトの一方又は他方の進行を選択的に停止する。ベルトの一方を停止することにより、他方が継続して進行する間に、被搬送物品を回転させることができる。
【0006】
発明の特徴を具体化したコンベヤの更にもう1つのバージョンは、ベルトループを形成する第1及び第2の個別駆動型コンベヤベルトを備える。各ベルトは、幅方向に第1の側部から第2の側部へ且つ厚さ方向に外面から内面へ延びる。これらのベルトは、互いに平行に配設されている。第1のベルトの第1の側部は、第2のベルトの第2の側部に隣接している。ループの一部はキャリーウエイを規定し、物品は、このキャリーウエイに沿って、上流端から逆の下流端へ外面に沿って搬送される。これらのベルトは、ベルトの外面及び内面を超えて突出した複数のローラを有する。ベアリング表面は、キャリーウエイの少なくとも一部に沿ってベルトの下にある。ローラは、ベルトの内面から延びて、ベアリング表面と回転接触する。この回転接触は、ベルトがベルト移動の方向に進行するに従い、ローラを回転させる。第1のベルト内のローラの各々は、第1のベルトの第1の側部とローラの上流位置で交差する軸を中心として回転するように配列されている。第2のベルト内のローラの各々は、第2のベルトの第2の側部とローラの上流位置で交差する軸を中心として回転するように配列されている。ベルトの一方又は双方に結合されたコントローラは、ベルトのいずれか一方を、他方が継続して進行する間に、選択的に停止する。
【0007】
コンベヤの別のもう1つのバージョンは、キャリーウエイに沿ってベルト移動の方向に駆動されるように配設された第1のローラトップベルトを備える。第2のローラトップベルトは、キャリーウエイに沿って第1のローラトップベルトと平行に配設されている。ベアリング表面は、キャリーウエイの少なくとも一部に沿ってベルトの下にある。ベルトの各々は、キャリーウエイ内でベアリング表面に接触するローラを有する。ベルトがベルト移動の方向に駆動されるに従い、ベアリング表面とローラの接触は、ローラを回転させる。各ベルト上のローラは、ローラが回転されるに従い、他方のベルトに向けられた成分を持つ力を被搬送物品に加えるように配列されている。ドライブシステムは、ベルトに結合されて、ベルト上を搬送されている物品を回転させるに十分な時間、ベルトの一方を、他方が進行している間に、選択的に停止させる。
【0008】
1つの形態において、発明の特徴を具体化した方法は、幅方向に第1の側部から第2の側部へ延びると共にベルトの外面及び内面を超えて突出するローラを有し、且つベルトの第1の側部から反時計方向に測定された鋭角を形成する第1の軸を支えとして回転するように配列された第1のコンベヤベルトを選択する工程を備える。この方法は更に、幅方向に第1の側部から第2の側部へ延びると共に、そのローラがベルトの第2の側部から時計方向に測定された鋭角を形成する第2の軸を支えとして回転するように配列された第2のコンベヤベルトを選択する工程を備える。この方法によると、ベルトは、第1のベルトの第1の側部を第2のベルトの第2の側部に隣接させて、平行に配置される。この方法は更に、第1及び第2のコンベヤベルトの一部を、ベルトの底部表面を超えて突出するローラに接触する下層のベアリング表面上に支持して、ベルトが進行するに従って、ローラを回転させる工程を備える。この方法は更に、ベルトをベルト移動の方向に進行させる工程と、ベルトの外面を超えて突出するローラの上に物品を置く工程とを備える。この方法は最後に、ベルトの一方が進行することを停止して、他方のベルトが継続して進行するに従いローラ上の物品が回転することを防止する工程を備える。
【0009】
発明のこれらの特徴及び形態は、その利点と同様に、以下の説明、添付された請求の範囲、添付の見出しを参照することによって、より良く理解される。
【0010】
[詳細な説明]
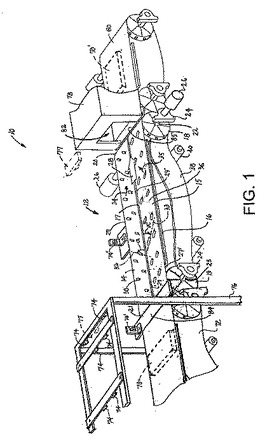
図1に、発明の特徴を具体化したコンベヤが示されている。このコンベヤ10は、物品回転式コンベヤ12を有する。このコンベヤは、第1及び第2のローラトップコンベヤベルト14,15からなり、これらは狭いギャップ17の反対側に平行に配列されている。これらベルトは、コンベヤフレーム16(明瞭化のために部分的にのみ示されている)内に支持されている。各ベルトは、幅方向に第1の側部27,27’から第2の側部29,29’へ延び、第1のベルトの第1の側部は、第2のベルトの第2の側部に隣接している。各ローラトップベルトは、コンベヤの下流端20及び上流端21のドライブスプロケット18及びアイドラスプロケット19を中心として形作られている。ドライブスプロケットは、ベアリングブロック24の各端部で支持されたドライブシャフト22上に搭載されている。ドライブシャフトは、モータ26に結合され、このモータは、シャフト及びスプロケットを回転させて、ベルトをベルト移動の方向、即ち搬送方向28に駆動する。上流端のアイドラスプロケットは、ベアリングブロック24による回転用に各端部で支持されたアイドラシャフト23上に搭載されている。ベアリングブロックは、コンベヤフレームに搭載されている。各ローラトップベルトは、それ自体のドライブシャフトとアイドラシャフトとを有し、ベルトが異なるスピードで駆動されたり、個別に停止されるようにする。ベルトは、物品を上側キャリーウエイ36に沿って上流端から下流端へ搬送する。ベルトは、その折り返しを下側キャリーウエイ38に沿って形成する。この下側キャリーウエイは、垂れ下がりを低減するためにシューズ、ドラム、又はローラ40によって支持されている。
【0011】
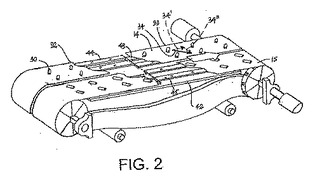
各ベルトは、ベルト移動の方向に関して鋭角α,α’を形成する傾斜した軸32,33を支えとして回転する複数のローラ30によって特徴付けられる。これらの軸は、ローラの上流位置でベルト間ギャップと交差する。これらの角度は、2つの平行なベルトを分離するギャップを中心とした互いの鏡像であることが好ましい。これらの角度は、例えば45°又は60°である。ローラの回転は、被搬送物品をギャップに向けて押し進める。回転するローラによってそれらの上の物品に加えられる力の方向は、矢印34,35によって示されている。図2に示されているように、第1のベルト14内の各ローラによって加えられる力34は、第1の下流成分34’と、第2のベルト15に向けられた第2の成分34”とを持つ。第2のベルト内の回転するローラによって加えられる力は、下流に且つ第1のベルトに向けられている。ベルトは、コンベヤフレームで支持されたパン42内のキャリーウエイ36に沿って支持される。ベルトの下には、パンに装着されたウエアストリップ44,45が横たわる。キャリーウエイの上流部分92内の上流ウエアストリップ44は、ローラ30が全くない縦方向レーンに沿って、ベルトの下方に横たわる。キャリーウエイの下流部分93内の下流ウエアストリップ45は、上流ウエアストリップから横方向にオフセットされて、ローラを含む縦方向レーン内のベルトの下方に横たわる。このようにして、キャリーウエイの不活性な上流部分におけるローラは、受動的且つ自由であって、被搬送物品の影響下で回転する。活性な下流部分では、ウエアストリップ45上の頂部ベアリング表面48と直接接触しているローラは、ベルトがベルト移動の方向に進行するに従い、回転するように駆動される。ベルトが停止されると、そのローラは、ウエアストリップとの接触によって、回転が幾分妨げられる。活性部分は、その代わりに、上流部分に配置され得る。上流部分は、被搬送物品が早めに回転することを許容して、後尾の物品が不活上流部分に入ることができるようにする。この場合、既に回転させられた物品は、不活性下流部分に沿って前進する。この結果、より大きなスループットが生じる。
【0012】
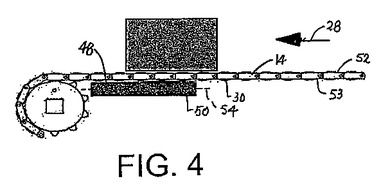
ベアリング表面48は、図4に示されているように、キャリーウエイの下流部分にある円筒形ローラ50の周辺部によって与えられる。各円筒形ローラは、ベルトローラ30の縦方向レーンの下にある。ベルトローラの突出部は、外側及び内側のベルト表面52,53を超えて突出し、そして縦方向軸54を中心に自由に回転できる円筒形ローラの周辺部と接触している。傾けて配置されたベルトローラと円筒形ローラとの相互作用は、ベルトローラと平坦な静止ウエアストリップとの相互作用よりも多い回転及び少ない摺動を生じる。これらは、キャリーウエイの少なくとも一部分に沿ってローラの下にあるベアリング表面を与える2つの手法を表す。
【0013】
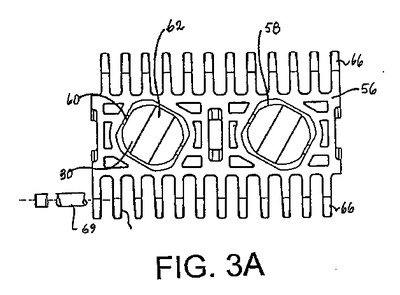
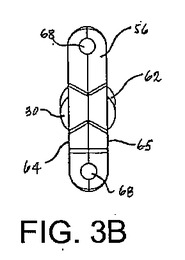
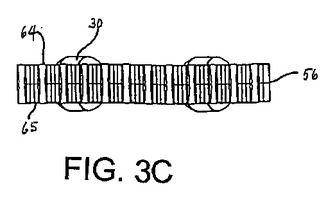
ローラトップベルト14,15は、傾いたローラ付きの平坦なベルトとして構築され得るが、これらベルトは、ベルトモジュールの個別の列からなるモジュール式プラスチック製コンベヤベルト、例えば図3A〜3Cに示された内部ベルトモジュール56であることが好ましい。このモジュールは、熱可塑性ポリマー、例えばポロプロピレン、ポリエチレン、アセタール、又は複合材料を用いて射出成型プロセスで成型されることが好ましい。成型された中央孔付きプラスチックローラ30は、空洞58内に、空洞の壁を通して延びた心棒60を支えとして回転可能に実装され、そしてモジュール本体内に保持される。ローラはまた、エラストマーの外側面又はエラストマーの外側バンド62を有して、高摩擦接触を下側のベアリング表面との間及び被搬送物品との間に与える。ローラの突出部は、モジュールの厚さを通して、頂部及び底部表面64,65を超えるように突出している。頂部及び底部表面は、それらが構成するベルトの外側及び内側表面を形成する。モジュールの各端部に沿ったヒンジ要素66は、それらを通して形成された、整列された開口部68を有する。1つのベルトは、1以上のベルトモジュールの列を形成することによって構築される。各列の先頭端にあるヒンジ要素は、隣接する列の後尾端に沿ったヒンジ要素と噛み合わされる。ヒンジピン69は、噛み合わされたヒンジ要素内の整列された開口部によって形成される横方向通路内に受け入れられる。ヒンジピンは、複数の列を一緒に接続して、ベルトが節動することを可能にする。モジュールは、強度のために、煉瓦積みパターンで配置されることが好ましい。好適なベルトは、米国ルイジアナ州ハラハンのIntralox社によって製造、販売されているシリーズ400型アングルドローラ(Angled Roller:商標)ベルトである。
【0014】
図1に示されているように、ローラトップコンベヤ12は、物品70、例えば手荷物を、ベルトコンベヤであるインフィードコンベヤ72から供給される。光電センサ74のアレイが、フレームワーク76内のインフィードコンベヤキャリーウエイの上方に実装されている。これらのセンサ、例えば米国ウイスコンシン州ミルウォーキーのロックウエルオートメーション社によって販売されているAlley−Bradley(登録商標)モデル42BC型光電センサは、各被搬送物品の一般的方位及びサイズを決定することに使用される。物品回転式コンベヤ12の側部に沿った位置に実装された追加の光電センサ74’,74”は、コンベヤに沿ったそれらの位置における被搬送物品の存在を検知することに使用される。他のタイプのセンサ、例えばデジタルカメラやレーザ距離センサは、排他的に又は組み合わせて、同様の効果に対して使用され得る。例えば、カメラ77は、インフィードコンベヤ及びキャリーウエイの活性部分の上方に位置決めされ得る。処理場所78は、ローラトップコンベヤの下流に示されている。処理場所におけるコンベヤ80は、規制された開口部82を通してローラトップコンベヤから物品を受ける。ノーズバー移送板84,85は、オプションでコンベヤ間に使用され、連続したベルトの端部間の間隔をブリッジすることができる。ローラトップコンベヤは、各被搬送物品を、その物品が規制部を通過するに必要なように、その上流方位70から下流方位70’へ回転させるように動作させられる。
【0015】
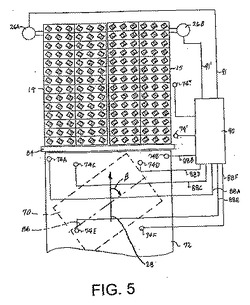
図5は、コンベヤの平面図を制御のブロック図と関連して示している。2つのローラトップベルト14,15は、平行に上方から示されている。6つの光電センサ74A〜Fは、被搬送物品70の一般的方位及びサイズを検出するための1つの可能な配置で示されている。特に、これらセンサは、物品の長軸86の長さと、ベルト移動の方向28に対するその角度βとを決定することに使用され得る。各センサは、信号線88A〜Fを通してコントローラ90に信号を送信する。光電センサの場合、この信号は、センサ下方の焦点距離における被搬送物品の存在又は不在を示す。この焦点距離は、インフィードコンベヤ72の数インチ上方に設定される。コンベヤ上の被搬送物品は、光線を反射して光電センサに戻し、その位置における自己の存在を示す。コントローラは、6つの信号から、例えば長軸の長さとその角度βを決定することができる。コンベヤシステムの側部でアレイの下流に位置決めされた同期式光電センサ74’は、被搬送物品がアレイによって検知されるべき位置にあることを示す信号をコントローラに送信する。物品のサイズ及び方位に依存して、コントローラは、モータ26A,26Bの一方を制御線91,91’を通して制御して、ローラトップベルト14,15の一方を停止させる。この間、他方は継続して進行する。マーク用光電センサ74”は、コンベヤの下流制御部分に被搬送物品が進入したことをマークする信号をコントローラに送信する。この信号の受信後に、必要であれば、コントローラは物品の回転を始動する。一方のベルトの継続した運動と他方のベルトの停止された運動は、被搬送物品を、下流の規制された開口部が適応する1つの方位へと回転させる。各ローラトップベルト用の個別ドライブ(モータ、シャフト、スプロケット)を含んだドライブシステムを選択的に制御することができる。従って、コントローラは、一方又は他方のローラトップベルトを停止させることによって、コンベアが物品を時計方向又は反時計方向に回転させることを可能にするか、あるいは両ベルトを停止させることなく駆動することによって、物品が回転することなく通過することを可能にする。ベルトは、十分な回転を果たすために所定の時間停止される。この所定の時間は、経験的に決定される。スループットを増加するために、非停止のベルトが、その代わりにスピードアップされ、より高速に、例えばその標準スピードよりも50%又は100%速く走行する。他方のベルトが停止されている間のこのスピードアップは、被搬送物品を少ない時間で回転させる。より複雑な、例えばカメラを使用して信号をコントローラに送信する閉ループ型検知方式は、十分な回転が達成されたことをカメラが検出するや否や、ベルトを再始動させることに使用され得る。
【0016】
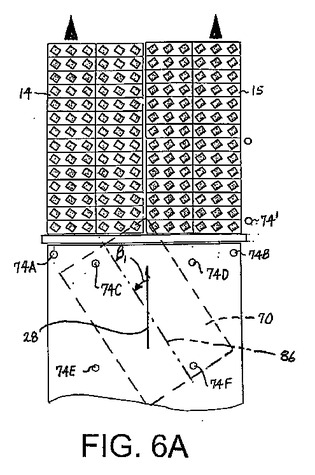
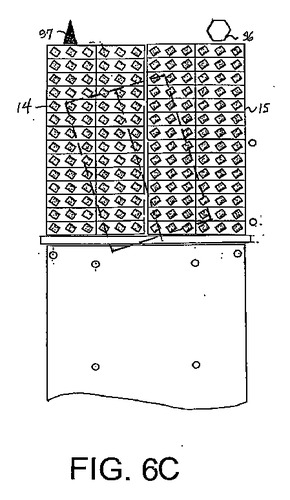
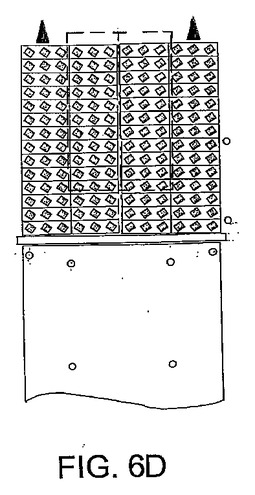
図6A〜6Bは、適切な動作のために時計方向回転を必要とする被搬送物品の存在下でのコンベヤの動作を段階的に描いている。図6Aでは、被搬送物品70は、その物品が同期式センサ74’によって検出されるや否や、センサアレイ74A〜Dによって検知される。コントローラは、アレイ信号から、物品の長軸86の長さと、搬送方向28に対するその方位とを判断する。この例では、物品の長軸は、ベルト移動の方向から反時計方向に測定された鋭角β1にある。図6Bでは、物品は、ローラトップコンベヤベルト14,15上で更に十分に受け取られる。これらベルトは、ローラ30が下層のベアリング表面との接触による回転をしていないキャリーウエイの上流部分92に沿って物品を搬送する。ローラが下層のベアリング表面と接触しているキャリーウエイの下流部分93をマークしているセンサ74”に物品が達するまで、両ベルトは、一緒にベルト移動の方向に進行している。物品が上流部分に沿って移動するに従い、その物品は、自由状態のローラ上で僅かに回転することがある。マーク用センサ74”は、物品が下流部分に進入したことを示す信号をコントローラに送信する。この例では、コントローラは、下流の規制部でジャム状態を生じさせるに十分な量だけベルト移動の方向から反時計方向に回転される物品の長軸を知って、第2のローラトップベルト15を(6角形96によって示されるように)停止させる。この場合、第1のベルトは、継続して進行する(矢印97)。第2のベルト内の停止したローラと組み合わされた第1のベルト上のローラの回転は、図6Cに示されているように、キャリーウエイの下流部分において、物品を時計方向に回転させる。所定の期間後に、第2のローラトップベルトは、図6Dに示されているように、もう一度指令されて走行する。このときまでに、被搬送物品は、2つのベルト上で概ね中央に配置される。この場合、その長軸は、概ねベルト移動の方向に向けられて、下流の規制を通して幅方向に適合する。
【0017】
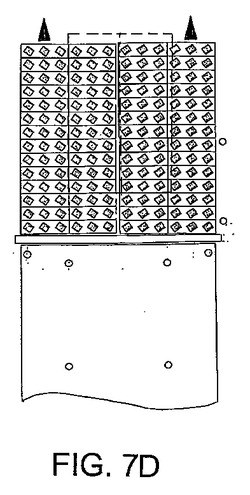
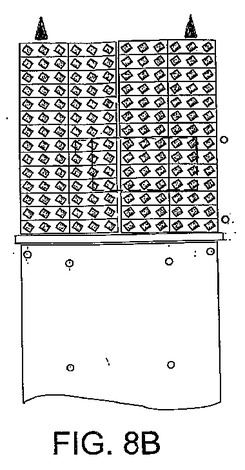
図7A〜7Dは、長軸がベルト移動の方向から時計方向に測定された鋭角β2にある被搬送物品を伴うコンベヤの動作を示す。この例では、コントローラは、第1のベルト14を停止し(図6C)、第2のベルト15は、継続して走行する。このことで、物品は反時計方向に回転して、その長軸を概ねベルト移動の方向に整列させる。図8A〜8Dは、その長軸が規制をクリアするに十分小さいので、回転される必要のない小型の物品98の進行を示している。図8Aでは、センサアレイは、先ず物品が再方位付けを要しないほど小さなものであることを検出する。この物品は、図8Bにおけるローラトップコンベヤの上流部分内の自由ローラに沿って進行する。いずれかのベルトを停止させるための停止コマンドは、コントローラから送信されない。ベルトは、図8Cに示されているように、継続して進行する。キャリアウエイの下流部分において下層のベアリング表面に沿って回転することを強制されたローラは、コンベヤ上の物品を中央に位置決めして、その物品が図8Dに示されているように出るようにする。大型ではあるが、それでも長軸が概ねベルト移動の方向に向けられた物品は、同様に扱われる。
【0018】
このように発明は好ましいバージョンに関して説明されてきたが、他のバージョンも可能である。例えば、異なる物品寸法又は規制サイズに適応させるために、光電センサのアレイは、図8Cに仮想線で示された代替センサアレイ配置75によって表されているように、異なるパターンに配置され得る。第2の例として、ベアリング表面がローラの下にある下流コンベヤ区間は、上流に延びて、キャリーウエイ全体を包含することができる。マーク用センサを削除し、そして同期式センサの信号後の固定時間遅延を使用して、ベルトの一方又は他方に停止するように指令することも可能である。もう1つの例として、センサは、コンベヤの出口付近に位置決めされ得る。これは、そこでの物品の存在を検知するためであり、且つ開ループシステムでベルトの一方を単に所定時間停止させるのではなく、閉ループ制御システムで停止されたベルトを再始動させるためである。それ故、これら数例が示唆するように、請求の範囲は、説明されたバージョンの詳細に限定されるものではない。
【図面の簡単な説明】
【0019】
【図1】発明の特徴を具体化したコンベヤの斜視図である。
【図2】図1のコンベヤのローラトップベルト部分の一部切断図である。
【図3A】図2のローラトップベルトで使用可能なコンベヤベルトモジュールの上平面である。
【図3B】図2のローラトップベルトで使用可能なコンベヤベルトモジュールの側面図である。
【図3C】図2のローラトップベルトで使用可能なコンベヤベルトモジュールの立前面図である。
【図4】図2のベルトの一部の立側面図である。
【図5】図1のコンベヤの機械的/電気的ブロック図である。
【図6A】図1のコンベヤにおける被搬送物品の時計方向回転を段階的に示す図である。
【図6B】図1のコンベヤにおける被搬送物品の時計方向回転を段階的に示す図である。
【図6C】図1のコンベヤにおける被搬送物品の時計方向回転を段階的に示す図である。
【図6D】図1のコンベヤにおける被搬送物品の時計方向回転を段階的に示す図である。
【図7A】図1のコンベヤにおける被搬送物品の反時計方向回転を段階的に示す図である。
【図7B】図1のコンベヤにおける被搬送物品の反時計方向回転を段階的に示す図である。
【図7C】図1のコンベヤにおける被搬送物品の反時計方向回転を段階的に示す図である。
【図7D】図1のコンベヤにおける被搬送物品の反時計方向回転を段階的に示す図である。
【図8A】回転を必要としない被搬送物品の図1のコンベヤの通過を段階的に示す図である。
【図8B】回転を必要としない被搬送物品の図1のコンベヤの通過を段階的に示す図である。
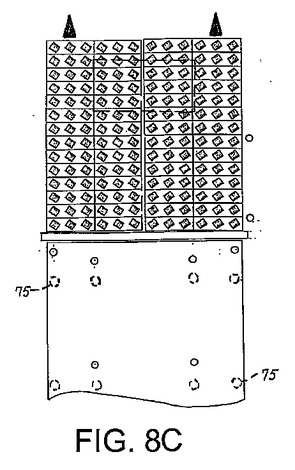
【図8C】代替センサアレイ配置を示している。
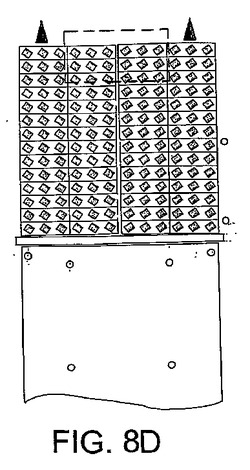
【図8D】回転を必要としない被搬送物品の図1のコンベヤの通過を段階的に示す図である。
【符号の説明】
【0020】
10 コンベヤ
12 物品回転式コンベヤ
14,15 第1及び第2のローラトップコンベヤベルト
16 コンベヤフレーム
17 ギャップ
18 ドライブスプロケット
19 アイドラスプロケット
20 コンベヤの下流端
21 コンベヤの上流端
22 ドライブシャフト
23 アイドラシャフト
24 ベアリングブロック
26 モータ
27,27’ 第1の側部
29,29’ 第2の側部
30 ローラ
32,33 軸
36 上側キャリーウエイ
38 下側キャリーウエイ
40 ローラ
70 物品
72 インフィードコンベヤ
74 光電センサ
74’,74” 追加の光電センサ
76 フレームワーク
77 カメラ
78 処理場所
80 コンベヤ
82 開口部
84,85 ノーズバー移送板
【技術分野】
【0001】
[背景]
本発明は、一般に動力駆動式コンベヤに関し、特に一対の平行なローラトップベルトの一方又は他方を選択的に停止させることによって、被搬送物品を回転させることが可能なコンベヤに関する。この場合、各ベルトは、物品を他方に対して傾斜状態で向けるように配置されたローラを有する。
【0002】
多くの搬送応用は、種々の形状及びサイズの被搬送物品が、下流処理又は検査のために、特定の方位で単一縦列に整列されることを必要とする。時折、コンベヤの幅又は処理場所の入口の幅は制限される。短軸及びより長い長軸を持つ概ね矩形のフットプリントを有した物品の場合、長軸や対角線は、コンベヤの制限された幅部分の寸法を超えてしまう。過大サイズの物品の長軸がコンベヤ上で方位付けされて、その長い軸がコンベヤの幅を横切ってしまう場合、物品はコンベヤの側壁間でジャム状態となる。このジャム状態を解放するために、手動介入がその後必要とされる。この結果、種々の形状及びサイズの物品を整列させると共に方位付けして、それらが幅制限されたコンベヤ区間でジャム状態にならないようにすることができるコンベヤに対する要求がある。
【0003】
[要約]
この要求及び他の要求は、発明の特徴を具体化したコンベヤによって満たされる。このコンベヤは、互いに平行に配置されたベルトループの形態の第1及び第2のコンベヤベルトを備える。各ベルトは、幅方向に第1の側部から第2の側部へ且つ厚さ方向に外面から内面へ延びる。第1のコンベヤベルトの第1の側部は、第2のコンベヤベルトの第2の側部に隣接する。平行ループの一部はキャリーウエイを規定し、物品は、このキャリーウエイに沿って、キャリーウエイの上流端から下流端へ、ベルトの外面上を搬送される。第1のドライブは、第1のベルトに係合して、それをキャリーウエイに沿ってベルト移動の方向に進行させる。第2のドライブは、同様に第2のコンベヤベルトに係合する。各ベルトは、その外面及び内面を超えて突出した複数のローラを有する。少なくとも1つのベアリング表面は、キャリーウエイの一部に沿って2つのベルトの下にある。ローラは、ベルトの内面を超えて突出してベアリング表面と回転接触する。この回転接触は、ベルトがベルト移動の方向に進行するに従い、ローラを回転させる。第1のベルト内のローラは、ベルト移動の方向に対して傾けられた第1の軸を中心として回転する。このようにして、ローラは、物品を下流に且つ第2のベルトに向けて追い出すように指向されたローラ上を搬送される物品に対し、第1の力を加える。第2のベルト内のローラは、第2の軸を中心として回転して、第2の力を加え、被搬送物品を下流に且つ第1のコンベヤベルトに向ける。コントローラは、ドライブの一方又は双方に結合されて、ベルトのいずれかを、他方が継続して進行する間に、選択的に停止する。
【0004】
発明の特徴を具体化したコンベヤのもう1つのバージョンは、キャリーウエイを備える。このキャリーウエイは、その上流及び下流端間に第1及び第2のローラトップコンベヤベルトを平行に有する。物品は、2つのベルト内のローラ上を搬送される。ベアリング表面は、キャリーウエイの一部に沿ってローラトップベルトの下にある。ベルト内のローラは、突出部を有する。この突出部は、キャリーウエイに沿って搬送される物品を支持すると共に、ベルトがキャリーウエイに沿ってベルト移動の方向に進行するに従いベアリング表面と回転接触式に係合する。第1のコンベヤベルト内のローラは、第1のコンベヤベルトが進行するに従い、被搬送物品を第2のコンベヤベルトに向けて追い出すように方位付けされた第1の軸を中心として回転するように配列されていると共に、これらローラは、ベアリング表面と接触している。同様に、第2のベルト内のローラは、被搬送物品を第1のコンベヤベルトに向けて追い出すように方位付けされた第2の軸を中心として回転するように配列されている。第1及び第2のドライブは、第1及び第2のベルトに結合されて、ベルトのいずれかの進行を、他方が継続して進行しているときに、選択的に停止する。
【0005】
物品回転式コンベヤのもう1つのバージョンは、コンベヤ配置を備える。このコンベヤ配置は、上流端から下流端へ延びると共に、ギャップの反対側に平行に位置決めされた一対の個別駆動型コンベヤベルトを有する。各コンベヤベルトは、複数のローラを有し、各ローラは頂部及び底部のベルト表面を超えて延びる突出部を有する。各ローラは、ローラの上流位置でギャップと交差する軸を支えとして回転可能である。このコンベヤ配置は、キャリーウエイを規定し、物品は、ベルトが上流端から下流端へ進行するに従って、キャリーウエイに沿ってローラ上を搬送される。キャリーウエイは、底部ベルト表面を超えて延びたローラに接触するベアリング表面によって下側に配置された活性部分を有する。この接触は、コンベヤベルトが進行するに従ってローラを回転させる。キャリーウエイはまた、ローラがベアリング表面と接触しない不活性部分を有する。コンベヤ配置に結合されたコントローラは、被搬送物品がキャリーウエイの活性部分にあるときは一対のコンベヤベルトの一方又は他方の進行を選択的に停止する。ベルトの一方を停止することにより、他方が継続して進行する間に、被搬送物品を回転させることができる。
【0006】
発明の特徴を具体化したコンベヤの更にもう1つのバージョンは、ベルトループを形成する第1及び第2の個別駆動型コンベヤベルトを備える。各ベルトは、幅方向に第1の側部から第2の側部へ且つ厚さ方向に外面から内面へ延びる。これらのベルトは、互いに平行に配設されている。第1のベルトの第1の側部は、第2のベルトの第2の側部に隣接している。ループの一部はキャリーウエイを規定し、物品は、このキャリーウエイに沿って、上流端から逆の下流端へ外面に沿って搬送される。これらのベルトは、ベルトの外面及び内面を超えて突出した複数のローラを有する。ベアリング表面は、キャリーウエイの少なくとも一部に沿ってベルトの下にある。ローラは、ベルトの内面から延びて、ベアリング表面と回転接触する。この回転接触は、ベルトがベルト移動の方向に進行するに従い、ローラを回転させる。第1のベルト内のローラの各々は、第1のベルトの第1の側部とローラの上流位置で交差する軸を中心として回転するように配列されている。第2のベルト内のローラの各々は、第2のベルトの第2の側部とローラの上流位置で交差する軸を中心として回転するように配列されている。ベルトの一方又は双方に結合されたコントローラは、ベルトのいずれか一方を、他方が継続して進行する間に、選択的に停止する。
【0007】
コンベヤの別のもう1つのバージョンは、キャリーウエイに沿ってベルト移動の方向に駆動されるように配設された第1のローラトップベルトを備える。第2のローラトップベルトは、キャリーウエイに沿って第1のローラトップベルトと平行に配設されている。ベアリング表面は、キャリーウエイの少なくとも一部に沿ってベルトの下にある。ベルトの各々は、キャリーウエイ内でベアリング表面に接触するローラを有する。ベルトがベルト移動の方向に駆動されるに従い、ベアリング表面とローラの接触は、ローラを回転させる。各ベルト上のローラは、ローラが回転されるに従い、他方のベルトに向けられた成分を持つ力を被搬送物品に加えるように配列されている。ドライブシステムは、ベルトに結合されて、ベルト上を搬送されている物品を回転させるに十分な時間、ベルトの一方を、他方が進行している間に、選択的に停止させる。
【0008】
1つの形態において、発明の特徴を具体化した方法は、幅方向に第1の側部から第2の側部へ延びると共にベルトの外面及び内面を超えて突出するローラを有し、且つベルトの第1の側部から反時計方向に測定された鋭角を形成する第1の軸を支えとして回転するように配列された第1のコンベヤベルトを選択する工程を備える。この方法は更に、幅方向に第1の側部から第2の側部へ延びると共に、そのローラがベルトの第2の側部から時計方向に測定された鋭角を形成する第2の軸を支えとして回転するように配列された第2のコンベヤベルトを選択する工程を備える。この方法によると、ベルトは、第1のベルトの第1の側部を第2のベルトの第2の側部に隣接させて、平行に配置される。この方法は更に、第1及び第2のコンベヤベルトの一部を、ベルトの底部表面を超えて突出するローラに接触する下層のベアリング表面上に支持して、ベルトが進行するに従って、ローラを回転させる工程を備える。この方法は更に、ベルトをベルト移動の方向に進行させる工程と、ベルトの外面を超えて突出するローラの上に物品を置く工程とを備える。この方法は最後に、ベルトの一方が進行することを停止して、他方のベルトが継続して進行するに従いローラ上の物品が回転することを防止する工程を備える。
【0009】
発明のこれらの特徴及び形態は、その利点と同様に、以下の説明、添付された請求の範囲、添付の見出しを参照することによって、より良く理解される。
【0010】
[詳細な説明]
図1に、発明の特徴を具体化したコンベヤが示されている。このコンベヤ10は、物品回転式コンベヤ12を有する。このコンベヤは、第1及び第2のローラトップコンベヤベルト14,15からなり、これらは狭いギャップ17の反対側に平行に配列されている。これらベルトは、コンベヤフレーム16(明瞭化のために部分的にのみ示されている)内に支持されている。各ベルトは、幅方向に第1の側部27,27’から第2の側部29,29’へ延び、第1のベルトの第1の側部は、第2のベルトの第2の側部に隣接している。各ローラトップベルトは、コンベヤの下流端20及び上流端21のドライブスプロケット18及びアイドラスプロケット19を中心として形作られている。ドライブスプロケットは、ベアリングブロック24の各端部で支持されたドライブシャフト22上に搭載されている。ドライブシャフトは、モータ26に結合され、このモータは、シャフト及びスプロケットを回転させて、ベルトをベルト移動の方向、即ち搬送方向28に駆動する。上流端のアイドラスプロケットは、ベアリングブロック24による回転用に各端部で支持されたアイドラシャフト23上に搭載されている。ベアリングブロックは、コンベヤフレームに搭載されている。各ローラトップベルトは、それ自体のドライブシャフトとアイドラシャフトとを有し、ベルトが異なるスピードで駆動されたり、個別に停止されるようにする。ベルトは、物品を上側キャリーウエイ36に沿って上流端から下流端へ搬送する。ベルトは、その折り返しを下側キャリーウエイ38に沿って形成する。この下側キャリーウエイは、垂れ下がりを低減するためにシューズ、ドラム、又はローラ40によって支持されている。
【0011】
各ベルトは、ベルト移動の方向に関して鋭角α,α’を形成する傾斜した軸32,33を支えとして回転する複数のローラ30によって特徴付けられる。これらの軸は、ローラの上流位置でベルト間ギャップと交差する。これらの角度は、2つの平行なベルトを分離するギャップを中心とした互いの鏡像であることが好ましい。これらの角度は、例えば45°又は60°である。ローラの回転は、被搬送物品をギャップに向けて押し進める。回転するローラによってそれらの上の物品に加えられる力の方向は、矢印34,35によって示されている。図2に示されているように、第1のベルト14内の各ローラによって加えられる力34は、第1の下流成分34’と、第2のベルト15に向けられた第2の成分34”とを持つ。第2のベルト内の回転するローラによって加えられる力は、下流に且つ第1のベルトに向けられている。ベルトは、コンベヤフレームで支持されたパン42内のキャリーウエイ36に沿って支持される。ベルトの下には、パンに装着されたウエアストリップ44,45が横たわる。キャリーウエイの上流部分92内の上流ウエアストリップ44は、ローラ30が全くない縦方向レーンに沿って、ベルトの下方に横たわる。キャリーウエイの下流部分93内の下流ウエアストリップ45は、上流ウエアストリップから横方向にオフセットされて、ローラを含む縦方向レーン内のベルトの下方に横たわる。このようにして、キャリーウエイの不活性な上流部分におけるローラは、受動的且つ自由であって、被搬送物品の影響下で回転する。活性な下流部分では、ウエアストリップ45上の頂部ベアリング表面48と直接接触しているローラは、ベルトがベルト移動の方向に進行するに従い、回転するように駆動される。ベルトが停止されると、そのローラは、ウエアストリップとの接触によって、回転が幾分妨げられる。活性部分は、その代わりに、上流部分に配置され得る。上流部分は、被搬送物品が早めに回転することを許容して、後尾の物品が不活上流部分に入ることができるようにする。この場合、既に回転させられた物品は、不活性下流部分に沿って前進する。この結果、より大きなスループットが生じる。
【0012】
ベアリング表面48は、図4に示されているように、キャリーウエイの下流部分にある円筒形ローラ50の周辺部によって与えられる。各円筒形ローラは、ベルトローラ30の縦方向レーンの下にある。ベルトローラの突出部は、外側及び内側のベルト表面52,53を超えて突出し、そして縦方向軸54を中心に自由に回転できる円筒形ローラの周辺部と接触している。傾けて配置されたベルトローラと円筒形ローラとの相互作用は、ベルトローラと平坦な静止ウエアストリップとの相互作用よりも多い回転及び少ない摺動を生じる。これらは、キャリーウエイの少なくとも一部分に沿ってローラの下にあるベアリング表面を与える2つの手法を表す。
【0013】
ローラトップベルト14,15は、傾いたローラ付きの平坦なベルトとして構築され得るが、これらベルトは、ベルトモジュールの個別の列からなるモジュール式プラスチック製コンベヤベルト、例えば図3A〜3Cに示された内部ベルトモジュール56であることが好ましい。このモジュールは、熱可塑性ポリマー、例えばポロプロピレン、ポリエチレン、アセタール、又は複合材料を用いて射出成型プロセスで成型されることが好ましい。成型された中央孔付きプラスチックローラ30は、空洞58内に、空洞の壁を通して延びた心棒60を支えとして回転可能に実装され、そしてモジュール本体内に保持される。ローラはまた、エラストマーの外側面又はエラストマーの外側バンド62を有して、高摩擦接触を下側のベアリング表面との間及び被搬送物品との間に与える。ローラの突出部は、モジュールの厚さを通して、頂部及び底部表面64,65を超えるように突出している。頂部及び底部表面は、それらが構成するベルトの外側及び内側表面を形成する。モジュールの各端部に沿ったヒンジ要素66は、それらを通して形成された、整列された開口部68を有する。1つのベルトは、1以上のベルトモジュールの列を形成することによって構築される。各列の先頭端にあるヒンジ要素は、隣接する列の後尾端に沿ったヒンジ要素と噛み合わされる。ヒンジピン69は、噛み合わされたヒンジ要素内の整列された開口部によって形成される横方向通路内に受け入れられる。ヒンジピンは、複数の列を一緒に接続して、ベルトが節動することを可能にする。モジュールは、強度のために、煉瓦積みパターンで配置されることが好ましい。好適なベルトは、米国ルイジアナ州ハラハンのIntralox社によって製造、販売されているシリーズ400型アングルドローラ(Angled Roller:商標)ベルトである。
【0014】
図1に示されているように、ローラトップコンベヤ12は、物品70、例えば手荷物を、ベルトコンベヤであるインフィードコンベヤ72から供給される。光電センサ74のアレイが、フレームワーク76内のインフィードコンベヤキャリーウエイの上方に実装されている。これらのセンサ、例えば米国ウイスコンシン州ミルウォーキーのロックウエルオートメーション社によって販売されているAlley−Bradley(登録商標)モデル42BC型光電センサは、各被搬送物品の一般的方位及びサイズを決定することに使用される。物品回転式コンベヤ12の側部に沿った位置に実装された追加の光電センサ74’,74”は、コンベヤに沿ったそれらの位置における被搬送物品の存在を検知することに使用される。他のタイプのセンサ、例えばデジタルカメラやレーザ距離センサは、排他的に又は組み合わせて、同様の効果に対して使用され得る。例えば、カメラ77は、インフィードコンベヤ及びキャリーウエイの活性部分の上方に位置決めされ得る。処理場所78は、ローラトップコンベヤの下流に示されている。処理場所におけるコンベヤ80は、規制された開口部82を通してローラトップコンベヤから物品を受ける。ノーズバー移送板84,85は、オプションでコンベヤ間に使用され、連続したベルトの端部間の間隔をブリッジすることができる。ローラトップコンベヤは、各被搬送物品を、その物品が規制部を通過するに必要なように、その上流方位70から下流方位70’へ回転させるように動作させられる。
【0015】
図5は、コンベヤの平面図を制御のブロック図と関連して示している。2つのローラトップベルト14,15は、平行に上方から示されている。6つの光電センサ74A〜Fは、被搬送物品70の一般的方位及びサイズを検出するための1つの可能な配置で示されている。特に、これらセンサは、物品の長軸86の長さと、ベルト移動の方向28に対するその角度βとを決定することに使用され得る。各センサは、信号線88A〜Fを通してコントローラ90に信号を送信する。光電センサの場合、この信号は、センサ下方の焦点距離における被搬送物品の存在又は不在を示す。この焦点距離は、インフィードコンベヤ72の数インチ上方に設定される。コンベヤ上の被搬送物品は、光線を反射して光電センサに戻し、その位置における自己の存在を示す。コントローラは、6つの信号から、例えば長軸の長さとその角度βを決定することができる。コンベヤシステムの側部でアレイの下流に位置決めされた同期式光電センサ74’は、被搬送物品がアレイによって検知されるべき位置にあることを示す信号をコントローラに送信する。物品のサイズ及び方位に依存して、コントローラは、モータ26A,26Bの一方を制御線91,91’を通して制御して、ローラトップベルト14,15の一方を停止させる。この間、他方は継続して進行する。マーク用光電センサ74”は、コンベヤの下流制御部分に被搬送物品が進入したことをマークする信号をコントローラに送信する。この信号の受信後に、必要であれば、コントローラは物品の回転を始動する。一方のベルトの継続した運動と他方のベルトの停止された運動は、被搬送物品を、下流の規制された開口部が適応する1つの方位へと回転させる。各ローラトップベルト用の個別ドライブ(モータ、シャフト、スプロケット)を含んだドライブシステムを選択的に制御することができる。従って、コントローラは、一方又は他方のローラトップベルトを停止させることによって、コンベアが物品を時計方向又は反時計方向に回転させることを可能にするか、あるいは両ベルトを停止させることなく駆動することによって、物品が回転することなく通過することを可能にする。ベルトは、十分な回転を果たすために所定の時間停止される。この所定の時間は、経験的に決定される。スループットを増加するために、非停止のベルトが、その代わりにスピードアップされ、より高速に、例えばその標準スピードよりも50%又は100%速く走行する。他方のベルトが停止されている間のこのスピードアップは、被搬送物品を少ない時間で回転させる。より複雑な、例えばカメラを使用して信号をコントローラに送信する閉ループ型検知方式は、十分な回転が達成されたことをカメラが検出するや否や、ベルトを再始動させることに使用され得る。
【0016】
図6A〜6Bは、適切な動作のために時計方向回転を必要とする被搬送物品の存在下でのコンベヤの動作を段階的に描いている。図6Aでは、被搬送物品70は、その物品が同期式センサ74’によって検出されるや否や、センサアレイ74A〜Dによって検知される。コントローラは、アレイ信号から、物品の長軸86の長さと、搬送方向28に対するその方位とを判断する。この例では、物品の長軸は、ベルト移動の方向から反時計方向に測定された鋭角β1にある。図6Bでは、物品は、ローラトップコンベヤベルト14,15上で更に十分に受け取られる。これらベルトは、ローラ30が下層のベアリング表面との接触による回転をしていないキャリーウエイの上流部分92に沿って物品を搬送する。ローラが下層のベアリング表面と接触しているキャリーウエイの下流部分93をマークしているセンサ74”に物品が達するまで、両ベルトは、一緒にベルト移動の方向に進行している。物品が上流部分に沿って移動するに従い、その物品は、自由状態のローラ上で僅かに回転することがある。マーク用センサ74”は、物品が下流部分に進入したことを示す信号をコントローラに送信する。この例では、コントローラは、下流の規制部でジャム状態を生じさせるに十分な量だけベルト移動の方向から反時計方向に回転される物品の長軸を知って、第2のローラトップベルト15を(6角形96によって示されるように)停止させる。この場合、第1のベルトは、継続して進行する(矢印97)。第2のベルト内の停止したローラと組み合わされた第1のベルト上のローラの回転は、図6Cに示されているように、キャリーウエイの下流部分において、物品を時計方向に回転させる。所定の期間後に、第2のローラトップベルトは、図6Dに示されているように、もう一度指令されて走行する。このときまでに、被搬送物品は、2つのベルト上で概ね中央に配置される。この場合、その長軸は、概ねベルト移動の方向に向けられて、下流の規制を通して幅方向に適合する。
【0017】
図7A〜7Dは、長軸がベルト移動の方向から時計方向に測定された鋭角β2にある被搬送物品を伴うコンベヤの動作を示す。この例では、コントローラは、第1のベルト14を停止し(図6C)、第2のベルト15は、継続して走行する。このことで、物品は反時計方向に回転して、その長軸を概ねベルト移動の方向に整列させる。図8A〜8Dは、その長軸が規制をクリアするに十分小さいので、回転される必要のない小型の物品98の進行を示している。図8Aでは、センサアレイは、先ず物品が再方位付けを要しないほど小さなものであることを検出する。この物品は、図8Bにおけるローラトップコンベヤの上流部分内の自由ローラに沿って進行する。いずれかのベルトを停止させるための停止コマンドは、コントローラから送信されない。ベルトは、図8Cに示されているように、継続して進行する。キャリアウエイの下流部分において下層のベアリング表面に沿って回転することを強制されたローラは、コンベヤ上の物品を中央に位置決めして、その物品が図8Dに示されているように出るようにする。大型ではあるが、それでも長軸が概ねベルト移動の方向に向けられた物品は、同様に扱われる。
【0018】
このように発明は好ましいバージョンに関して説明されてきたが、他のバージョンも可能である。例えば、異なる物品寸法又は規制サイズに適応させるために、光電センサのアレイは、図8Cに仮想線で示された代替センサアレイ配置75によって表されているように、異なるパターンに配置され得る。第2の例として、ベアリング表面がローラの下にある下流コンベヤ区間は、上流に延びて、キャリーウエイ全体を包含することができる。マーク用センサを削除し、そして同期式センサの信号後の固定時間遅延を使用して、ベルトの一方又は他方に停止するように指令することも可能である。もう1つの例として、センサは、コンベヤの出口付近に位置決めされ得る。これは、そこでの物品の存在を検知するためであり、且つ開ループシステムでベルトの一方を単に所定時間停止させるのではなく、閉ループ制御システムで停止されたベルトを再始動させるためである。それ故、これら数例が示唆するように、請求の範囲は、説明されたバージョンの詳細に限定されるものではない。
【図面の簡単な説明】
【0019】
【図1】発明の特徴を具体化したコンベヤの斜視図である。
【図2】図1のコンベヤのローラトップベルト部分の一部切断図である。
【図3A】図2のローラトップベルトで使用可能なコンベヤベルトモジュールの上平面である。
【図3B】図2のローラトップベルトで使用可能なコンベヤベルトモジュールの側面図である。
【図3C】図2のローラトップベルトで使用可能なコンベヤベルトモジュールの立前面図である。
【図4】図2のベルトの一部の立側面図である。
【図5】図1のコンベヤの機械的/電気的ブロック図である。
【図6A】図1のコンベヤにおける被搬送物品の時計方向回転を段階的に示す図である。
【図6B】図1のコンベヤにおける被搬送物品の時計方向回転を段階的に示す図である。
【図6C】図1のコンベヤにおける被搬送物品の時計方向回転を段階的に示す図である。
【図6D】図1のコンベヤにおける被搬送物品の時計方向回転を段階的に示す図である。
【図7A】図1のコンベヤにおける被搬送物品の反時計方向回転を段階的に示す図である。
【図7B】図1のコンベヤにおける被搬送物品の反時計方向回転を段階的に示す図である。
【図7C】図1のコンベヤにおける被搬送物品の反時計方向回転を段階的に示す図である。
【図7D】図1のコンベヤにおける被搬送物品の反時計方向回転を段階的に示す図である。
【図8A】回転を必要としない被搬送物品の図1のコンベヤの通過を段階的に示す図である。
【図8B】回転を必要としない被搬送物品の図1のコンベヤの通過を段階的に示す図である。
【図8C】代替センサアレイ配置を示している。
【図8D】回転を必要としない被搬送物品の図1のコンベヤの通過を段階的に示す図である。
【符号の説明】
【0020】
10 コンベヤ
12 物品回転式コンベヤ
14,15 第1及び第2のローラトップコンベヤベルト
16 コンベヤフレーム
17 ギャップ
18 ドライブスプロケット
19 アイドラスプロケット
20 コンベヤの下流端
21 コンベヤの上流端
22 ドライブシャフト
23 アイドラシャフト
24 ベアリングブロック
26 モータ
27,27’ 第1の側部
29,29’ 第2の側部
30 ローラ
32,33 軸
36 上側キャリーウエイ
38 下側キャリーウエイ
40 ローラ
70 物品
72 インフィードコンベヤ
74 光電センサ
74’,74” 追加の光電センサ
76 フレームワーク
77 カメラ
78 処理場所
80 コンベヤ
82 開口部
84,85 ノーズバー移送板
【特許請求の範囲】
【請求項1】
コンベヤであって、キャリーウエイと、ベアリング表面と、第1及び第2のドライブとを備え、
キャリーウエイは、キャリーウエイの上流端と下流端との間に平行に配設された第1及び第2のローラトップコンベヤベルトを有して、物品を第1及び第2のローラトップコンベヤベルト内のローラの上を搬送し、
ベアリング表面は、キャリーウエイの一部に沿って第1及び第2のローラトップコンベヤベルトの下にあり、
第1及び第2のローラトップコンベヤベルト内のローラは、突出部を有し、この突出部は、キャリーウエイに沿って被搬送物品を支持すると共に、ベルトがキャリーウエイに沿ってベルト移動の方向に進行するに従いベアリング表面と回転接触式に係合するものであり、
ベアリング表面と回転接触している第1のコンベヤベルト内のローラは、第1のコンベヤベルトが進行するに従い、被搬送物品を第2のコンベヤベルトに向けて追い出すように方位付けされた第1の軸を中心として回転するように配列され、またベアリング表面と回転接触している第2のコンベヤベルト内のローラは、第2のコンベヤベルトが進行するに従い、被搬送物品を第1のコンベヤベルトに向けて追い出すように方位付けされた第2の軸を中心として回転するように配列され、
第1及び第2のドライブは、第1及び第2のローラトップコンベヤベルトに結合されて、ローラトップコンベヤベルトのいずれかの進行を、他方が継続して進行しているときに、選択的に停止することを特徴とするコンベヤ。
【請求項2】
被搬送物品の方位を検知するセンサと、第1及び第2のドライブに結合されてセンサからの信号に応答して第1及び第2のドライブのいずれかに停止信号を選択的に送信するコントローラとを更に備える請求項1に記載のコンベヤ。
【請求項3】
センサの一部は、幾何学的構造を持つアレイ状に配列され、この幾何学的構造は、コントローラが、被搬送物品の長軸と、ベルト移動の方向に対する長軸の角方位とを決定可能にするように選択されたものである請求項2に記載のコンベヤ。
【請求項4】
コントローラは、長軸が所定の長軸値を超えたときはいつでも停止信号を第1及び第2のドライブの一方に送信し、そして長軸の角方位は、ベルト移動の方向とは所定の角度値以上異なる請求項3に記載のコンベヤ。
【請求項5】
ドライブは、所定の期間コンベヤベルトを停止する請求項1に記載のコンベヤ。
【請求項6】
第1及び第2のドライブの一方は、第1及び第2のローラトップコンベヤベルトの一方を、他方が停止されている間に、スピードアップする請求項1に記載のコンベヤ。
【請求項7】
コンベヤであって、第1及び第2のコンベヤベルトと、第1のドライブと、第2のドライブと、少なくとも1つのベアリング表面と、コントローラとを備え、
第1及び第2のコンベヤベルトは、ベルトループの形態であって、各コンベヤベルトは、幅方向に第1の側部から第2の側部へ且つ厚さ方向に外面から内面へ延び、第1及び第2のコンベヤベルトは、互いに平行に配設され、第1のコンベヤベルトの第1の側部は、第2のコンベヤベルトの第2の側部に隣接し、ループの一部はキャリーウエイを規定し、物品は、このキャリーウエイに沿って、キャリーウエイの上流端から逆の下流端へ外面に沿って搬送され、
第1のドライブは、第1のコンベヤベルトに係合して、第1のコンベヤベルトをキャリーウエイに沿ってベルト移動の方向に上流端から下流端へ進行させ、
第2のドライブは、第2のコンベヤベルトに係合して、第2のコンベヤベルトをキャリーウエイに沿ってベルト移動の方向に進行させ、
第1及び第2のコンベヤベルトは、第1及び第2のコンベヤベルトの外面及び内面を超えて突出した複数のローラを有し、
少なくとも1つのベアリング表面は、キャリーウエイの一部に沿って第1及び第2のコンベヤベルトの下にあり、ローラは、第1及び第2のコンベヤベルトの内面を超えて突出してベアリング表面と回転接触し、第1及び第2のコンベヤベルトがベルト移動の方向に進行するに従い回転し、
第1のコンベヤベルト内のローラは、ベルト移動の方向に対して傾けられた第1の軸を中心として回転して、ベアリング表面と回転接触しているローラの上を搬送される物品に第1の力を加えて、その物品を下流に且つ第2のコンベヤベルトに向けて追い出すように配列され、また第2のコンベヤベルト内のローラは、ベルト移動の方向に対して傾けられた第2の軸を中心として回転して、ベアリング表面と回転接触しているローラの上を搬送される物品に第2の力を加えて、その物品を下流に且つ第1のコンベヤベルトに向けて追い出すように配列され、
コントローラは、第1及び第2のドライブの一方又は双方に結合されて、第1及び第2のコンベヤベルトのいずれかを、他方のコンベヤベルトが継続して進行する間に、選択的に停止することを特徴とするコンベヤ。
【請求項8】
キャリーウエイの上流端近傍に配設されると共に、キャリーウエイに沿って搬送される物品の方位を示す第1の信号をコントローラに送信する第1のセンサを更に備える請求項7に記載のコンベヤ。
【請求項9】
第1のセンサは、複数の個別センサのアレイを更に備え、各個別センサは、個別の第1の信号をコントローラに送信する請求項8に記載のコンベヤ。
【請求項10】
コントローラは、第1の信号に応答して第1及び第2のコンベヤベルトの一方又は他方を停止することが可能である請求項8に記載のコンベヤ。
【請求項11】
コントローラは、第1又は第2のコンベヤベルトを所定の期間停止させる請求項10に記載のコンベヤ。
【請求項12】
コントローラは、第1の信号に応答して第1及び第2のコンベヤベルトの一方又は他方をスピードアップすることが可能である請求項10に記載のコンベヤ。
【請求項13】
キャリーウエイに沿って上流位置に配設されて、第1のセンサによって検知された位置における物品の存在を示す第2の信号をコントローラに送信する第2のセンサを更に備える請求項8に記載のコンベヤ。
【請求項14】
キャリーウエイに沿ってベアリング表面の上流端近傍に配設されて、キャリーウエイに沿ったその位置における被搬送物品の存在を示す第3の信号をコントローラに送信する第3のセンサを更に備え、そしてコントローラは、第3の信号の受信後に、第1及び第2のドライブの一方に停止信号を送信する請求項8に記載のコンベヤ。
【請求項15】
ベアリング表面は、キャリーウエイの下流端で第1及び第2のコンベヤベルトの下にある請求項7に記載のコンベヤ。
【請求項16】
物品回転式コンベヤであって、コンベヤ配置と、コントローラとを備え、
コンベヤ配置は、上流端から下流端へ延びると共に、ギャップの反対側に平行に配設された一対の個別駆動型コンベヤベルトを備え、各コンベヤベルトは、複数のローラを有し、各ローラは頂部及び底部のベルト表面を超えて延びる突出部を有すると共に、ローラの上流位置でギャップと交差する軸を支えとして回転可能であり、このコンベヤ配置は、キャリーウエイを規定し、物品は、ベルトが上流端から下流端へ向かって進行するに従って、キャリーウエイに沿ってローラ上を搬送され、
キャリーウエイは、底部ベルト表面を超えて延びたローラに接触するベアリング表面によって下側に配置されてコンベヤベルトが進行するに従ってローラを回転させる活性部分と、底部ベルト表面を超えて延びたローラがベアリング表面と接触しない不活性部分とを有し、
コントローラは、コンベヤ配置に結合されて、被搬送物品がキャリーウエイの活性部分にあるときは一対のコンベヤベルトの一方又は他方の進行を選択的に停止して、被搬送物品を回転させることを特徴とするコンベヤ。
【請求項17】
コンベヤの上流端近傍に配設されると共に、キャリーウエイに沿って搬送される物品の方位を示す第1の信号をコントローラに送信する第1のセンサを更に備える請求項16に記載のコンベヤ。
【請求項18】
第1のセンサは、複数の個別センサのアレイを更に備え、各個別センサは、個別の第1の信号をコントローラに送信する請求項17に記載のコンベヤ。
【請求項19】
コントローラは、第1の信号に応答して第1及び第2のローラトップベルトの一方又は他方を停止することが可能である請求項17に記載のコンベヤ。
【請求項20】
コントローラは、第1又は第2のコンベヤベルトを所定の期間停止させる請求項19に記載のコンベヤ。
【請求項21】
コントローラは、第1及び第2のローラトップベルトの一方を、他方が停止されている間に、スピードアップすることが可能である請求項17に記載のコンベヤ。
【請求項22】
キャリーウエイに沿って上流位置に配設されて、第1のセンサによって検知された位置における物品の存在を示す第2の信号をコントローラに送信する第2のセンサを更に備える請求項17に記載のコンベヤ。
【請求項23】
キャリーウエイに沿ってベアリング表面の上流端近傍に配設されて、キャリーウエイに沿ったその位置における被搬送物品の存在を示す第3の信号をコントローラに送信する第3のセンサを更に備え、そしてコントローラは、第3の信号の受信後に、第1及び第2のドライブの一方に停止信号を送信する請求項23に記載のコンベヤ。
【請求項24】
コンベヤであって、第1及び第2の個別駆動型コンベヤベルトと、ベアリング表面と、コントローラとを備え、
第1及び第2の個別駆動型コンベヤベルトは、ベルトループを形成し、各コンベヤベルトは、幅方向に第1の側部から第2の側部へ且つ厚さ方向に外面から内面へ延び、第1及び第2のコンベヤベルトは、互いに平行に配設され、第1のコンベヤベルトの第1の側部は、第2のコンベヤベルトの第2の側部に隣接し、ループの一部はキャリーウエイを規定し、物品は、このキャリーウエイに沿って、キャリーウエイの上流端から逆の下流端へ外面に沿って搬送され、
第1及び第2のコンベヤベルトは、第1及び第2のコンベヤベルトの外面及び内面を超えて突出した複数のローラを有し、
ベアリング表面は、キャリーウエイの少なくとも一部に沿って第1及び第2のコンベヤベルトの下にあり、ローラは、第1及び第2のコンベヤベルトの内面から延びてベアリング表面と回転接触し、第1及び第2のコンベヤベルトがベルト移動の方向に進行するに従い回転し、
第1のローラトップベルト内のローラの各々は、第1のコンベヤベルトの第1の側部とローラの上流位置で交差する軸を中心として回転するように配列され、また第2のローラトップベルト内のローラの各々は、第2のコンベヤベルトの第2の側部とローラの上流位置で交差する軸を中心として回転するように配列され、
コントローラは、第1及び第2のコンベヤベルトの一方又は双方に結合されて、第1及び第2のコンベヤベルトのいずれかを、他方のコンベヤベルトが継続して進行する間に、選択的に停止することを特徴とするコンベヤ。
【請求項25】
被搬送物品の方位を示す信号をコントローラに送信するセンサを更に備え、コントローラは、前記信号から、第1及び第2のコンベヤベルトのいずれを停止するかを決定する請求項24に記載のコンベヤ。
【請求項26】
センサは、幾何学的構造を持つアレイ状に配列され、この幾何学的構造は、コントローラが、搬送される物品の長軸と、ベルト移動の方向に対する長軸の角方位とを、前記信号から決定可能にするように選択されたものである請求項25に記載のコンベヤ。
【請求項27】
コンベヤであって、第1のローラトップベルトと、第2のローラトップベルトと、ベアリング表面と、ドライブシステムとを備え、
第1のローラトップベルトは、キャリーウエイに沿ってベルト移動の方向に駆動されるように配設され、
第2のローラトップベルトは、キャリーウエイに沿って第1のローラトップベルトと平行に配設され、
ベアリング表面は、キャリーウエイの少なくとも一部に沿って第1及び第2のローラトップベルトの下にあり、
第1及び第2のローラトップベルトの各々は、キャリーウエイ内でベアリング表面に接触するローラを有して、ローラトップベルトがベルト移動の方向に駆動されるに従い、ローラを回転させ、
各ローラトップベルト上のローラは、ベアリング表面との接触によってローラが回転されるに従い、他方のローラトップベルトに向けられた成分を持つ力を被搬送物品に加えるように配列され、
ドライブシステムは、第1及び第2のローラトップベルトに結合されて、両ローラトップベルト上を搬送されている物品を回転させるに十分な時間、ローラトップベルトの一方を、他方がベルト移動の方向に進行している間に、選択的に停止させることを特徴とするコンベヤ。
【請求項28】
第1のローラトップベルトに結合されて、第1のローラトップベルトのベルト移動の方向への進行を始動及び停止する第1のドライブと、
第2のローラトップベルトに結合されて、第2のローラトップベルトのベルト移動の方向への進行を始動及び停止する第2のドライブと、
第1及び第2のドライブに結合されて、第1及び第2のローラトップコンベヤベルトの始動及び停止を制御するコントローラと
を更に備える請求項27に記載のコンベヤ。
【請求項29】
コンベヤ上を搬送される物品のサイズ及び方位を示す信号をコントローラに送信するセンサを更に備える請求項28に記載のコンベヤ。
【請求項30】
物品を回転させる方法であって、
幅方向に第1の側部から第2の側部へ延びると共にベルトの外面及び内面を超えて突出するローラを有し、且つベルトの第1の側部から反時計方向に測定された鋭角を形成する第1の軸を支えとして回転するように配列された第1のコンベヤベルトを選択する工程と、
幅方向に第1の側部から第2の側部へ延びると共にベルトの外面及び内面を超えて突出するローラを有し、且つベルトの第2の側部から時計方向に測定された鋭角を形成する第2の軸を支えとして回転するように配列された第2のコンベヤベルトを選択する工程と、
第1及び第2のコンベヤベルトを平行に、第1のコンベヤベルトの第1の側部を第2のコンベヤベルトの第2の側部に隣接させて配置する工程と、
第1及び第2のコンベヤベルトの一部を、底部表面を超えて突出するローラに接触する下側のベアリング表面上に支持して、ベルトが進行するに従って、ローラを回転させる工程と、
第1及び第2のコンベヤベルトをベルト移動の方向に進行させる工程と、
ベルト移動の方向に進行する第1及び第2のコンベヤベルトの外面を超えて突出するローラの上に物品を置く工程と、
第1及び第2のコンベヤベルトの一方が進行することを停止して、ベルトの他方が継続して進行するに従いローラ上の物品が回転することを防止する工程と
を備えることを特徴とする方法。
【請求項31】
センサのアレイを、物品の方位を検知する位置に配置する工程を更に備える請求項30に記載の方法。
【請求項32】
ローラ上の物品の方位を検知する工程を更に備える請求項30に記載の方法。
【請求項33】
物品の長軸の長さと、ベルト移動の方向に対する長軸の角方位とを決定する工程を更に備える請求項30に記載の方法。
【請求項34】
第1及び第2のコンベヤベルトのいずれか一方を選択して、物品の長軸の長さと長軸の角方位とに依存することを停止する工程を更に備える請求項33に記載の方法。
【請求項35】
第1及び第2のコンベヤベルトの一方が進行することを停止する間に、他方をスピードアップする工程を更に備える請求項30に記載の方法。
【請求項1】
コンベヤであって、キャリーウエイと、ベアリング表面と、第1及び第2のドライブとを備え、
キャリーウエイは、キャリーウエイの上流端と下流端との間に平行に配設された第1及び第2のローラトップコンベヤベルトを有して、物品を第1及び第2のローラトップコンベヤベルト内のローラの上を搬送し、
ベアリング表面は、キャリーウエイの一部に沿って第1及び第2のローラトップコンベヤベルトの下にあり、
第1及び第2のローラトップコンベヤベルト内のローラは、突出部を有し、この突出部は、キャリーウエイに沿って被搬送物品を支持すると共に、ベルトがキャリーウエイに沿ってベルト移動の方向に進行するに従いベアリング表面と回転接触式に係合するものであり、
ベアリング表面と回転接触している第1のコンベヤベルト内のローラは、第1のコンベヤベルトが進行するに従い、被搬送物品を第2のコンベヤベルトに向けて追い出すように方位付けされた第1の軸を中心として回転するように配列され、またベアリング表面と回転接触している第2のコンベヤベルト内のローラは、第2のコンベヤベルトが進行するに従い、被搬送物品を第1のコンベヤベルトに向けて追い出すように方位付けされた第2の軸を中心として回転するように配列され、
第1及び第2のドライブは、第1及び第2のローラトップコンベヤベルトに結合されて、ローラトップコンベヤベルトのいずれかの進行を、他方が継続して進行しているときに、選択的に停止することを特徴とするコンベヤ。
【請求項2】
被搬送物品の方位を検知するセンサと、第1及び第2のドライブに結合されてセンサからの信号に応答して第1及び第2のドライブのいずれかに停止信号を選択的に送信するコントローラとを更に備える請求項1に記載のコンベヤ。
【請求項3】
センサの一部は、幾何学的構造を持つアレイ状に配列され、この幾何学的構造は、コントローラが、被搬送物品の長軸と、ベルト移動の方向に対する長軸の角方位とを決定可能にするように選択されたものである請求項2に記載のコンベヤ。
【請求項4】
コントローラは、長軸が所定の長軸値を超えたときはいつでも停止信号を第1及び第2のドライブの一方に送信し、そして長軸の角方位は、ベルト移動の方向とは所定の角度値以上異なる請求項3に記載のコンベヤ。
【請求項5】
ドライブは、所定の期間コンベヤベルトを停止する請求項1に記載のコンベヤ。
【請求項6】
第1及び第2のドライブの一方は、第1及び第2のローラトップコンベヤベルトの一方を、他方が停止されている間に、スピードアップする請求項1に記載のコンベヤ。
【請求項7】
コンベヤであって、第1及び第2のコンベヤベルトと、第1のドライブと、第2のドライブと、少なくとも1つのベアリング表面と、コントローラとを備え、
第1及び第2のコンベヤベルトは、ベルトループの形態であって、各コンベヤベルトは、幅方向に第1の側部から第2の側部へ且つ厚さ方向に外面から内面へ延び、第1及び第2のコンベヤベルトは、互いに平行に配設され、第1のコンベヤベルトの第1の側部は、第2のコンベヤベルトの第2の側部に隣接し、ループの一部はキャリーウエイを規定し、物品は、このキャリーウエイに沿って、キャリーウエイの上流端から逆の下流端へ外面に沿って搬送され、
第1のドライブは、第1のコンベヤベルトに係合して、第1のコンベヤベルトをキャリーウエイに沿ってベルト移動の方向に上流端から下流端へ進行させ、
第2のドライブは、第2のコンベヤベルトに係合して、第2のコンベヤベルトをキャリーウエイに沿ってベルト移動の方向に進行させ、
第1及び第2のコンベヤベルトは、第1及び第2のコンベヤベルトの外面及び内面を超えて突出した複数のローラを有し、
少なくとも1つのベアリング表面は、キャリーウエイの一部に沿って第1及び第2のコンベヤベルトの下にあり、ローラは、第1及び第2のコンベヤベルトの内面を超えて突出してベアリング表面と回転接触し、第1及び第2のコンベヤベルトがベルト移動の方向に進行するに従い回転し、
第1のコンベヤベルト内のローラは、ベルト移動の方向に対して傾けられた第1の軸を中心として回転して、ベアリング表面と回転接触しているローラの上を搬送される物品に第1の力を加えて、その物品を下流に且つ第2のコンベヤベルトに向けて追い出すように配列され、また第2のコンベヤベルト内のローラは、ベルト移動の方向に対して傾けられた第2の軸を中心として回転して、ベアリング表面と回転接触しているローラの上を搬送される物品に第2の力を加えて、その物品を下流に且つ第1のコンベヤベルトに向けて追い出すように配列され、
コントローラは、第1及び第2のドライブの一方又は双方に結合されて、第1及び第2のコンベヤベルトのいずれかを、他方のコンベヤベルトが継続して進行する間に、選択的に停止することを特徴とするコンベヤ。
【請求項8】
キャリーウエイの上流端近傍に配設されると共に、キャリーウエイに沿って搬送される物品の方位を示す第1の信号をコントローラに送信する第1のセンサを更に備える請求項7に記載のコンベヤ。
【請求項9】
第1のセンサは、複数の個別センサのアレイを更に備え、各個別センサは、個別の第1の信号をコントローラに送信する請求項8に記載のコンベヤ。
【請求項10】
コントローラは、第1の信号に応答して第1及び第2のコンベヤベルトの一方又は他方を停止することが可能である請求項8に記載のコンベヤ。
【請求項11】
コントローラは、第1又は第2のコンベヤベルトを所定の期間停止させる請求項10に記載のコンベヤ。
【請求項12】
コントローラは、第1の信号に応答して第1及び第2のコンベヤベルトの一方又は他方をスピードアップすることが可能である請求項10に記載のコンベヤ。
【請求項13】
キャリーウエイに沿って上流位置に配設されて、第1のセンサによって検知された位置における物品の存在を示す第2の信号をコントローラに送信する第2のセンサを更に備える請求項8に記載のコンベヤ。
【請求項14】
キャリーウエイに沿ってベアリング表面の上流端近傍に配設されて、キャリーウエイに沿ったその位置における被搬送物品の存在を示す第3の信号をコントローラに送信する第3のセンサを更に備え、そしてコントローラは、第3の信号の受信後に、第1及び第2のドライブの一方に停止信号を送信する請求項8に記載のコンベヤ。
【請求項15】
ベアリング表面は、キャリーウエイの下流端で第1及び第2のコンベヤベルトの下にある請求項7に記載のコンベヤ。
【請求項16】
物品回転式コンベヤであって、コンベヤ配置と、コントローラとを備え、
コンベヤ配置は、上流端から下流端へ延びると共に、ギャップの反対側に平行に配設された一対の個別駆動型コンベヤベルトを備え、各コンベヤベルトは、複数のローラを有し、各ローラは頂部及び底部のベルト表面を超えて延びる突出部を有すると共に、ローラの上流位置でギャップと交差する軸を支えとして回転可能であり、このコンベヤ配置は、キャリーウエイを規定し、物品は、ベルトが上流端から下流端へ向かって進行するに従って、キャリーウエイに沿ってローラ上を搬送され、
キャリーウエイは、底部ベルト表面を超えて延びたローラに接触するベアリング表面によって下側に配置されてコンベヤベルトが進行するに従ってローラを回転させる活性部分と、底部ベルト表面を超えて延びたローラがベアリング表面と接触しない不活性部分とを有し、
コントローラは、コンベヤ配置に結合されて、被搬送物品がキャリーウエイの活性部分にあるときは一対のコンベヤベルトの一方又は他方の進行を選択的に停止して、被搬送物品を回転させることを特徴とするコンベヤ。
【請求項17】
コンベヤの上流端近傍に配設されると共に、キャリーウエイに沿って搬送される物品の方位を示す第1の信号をコントローラに送信する第1のセンサを更に備える請求項16に記載のコンベヤ。
【請求項18】
第1のセンサは、複数の個別センサのアレイを更に備え、各個別センサは、個別の第1の信号をコントローラに送信する請求項17に記載のコンベヤ。
【請求項19】
コントローラは、第1の信号に応答して第1及び第2のローラトップベルトの一方又は他方を停止することが可能である請求項17に記載のコンベヤ。
【請求項20】
コントローラは、第1又は第2のコンベヤベルトを所定の期間停止させる請求項19に記載のコンベヤ。
【請求項21】
コントローラは、第1及び第2のローラトップベルトの一方を、他方が停止されている間に、スピードアップすることが可能である請求項17に記載のコンベヤ。
【請求項22】
キャリーウエイに沿って上流位置に配設されて、第1のセンサによって検知された位置における物品の存在を示す第2の信号をコントローラに送信する第2のセンサを更に備える請求項17に記載のコンベヤ。
【請求項23】
キャリーウエイに沿ってベアリング表面の上流端近傍に配設されて、キャリーウエイに沿ったその位置における被搬送物品の存在を示す第3の信号をコントローラに送信する第3のセンサを更に備え、そしてコントローラは、第3の信号の受信後に、第1及び第2のドライブの一方に停止信号を送信する請求項23に記載のコンベヤ。
【請求項24】
コンベヤであって、第1及び第2の個別駆動型コンベヤベルトと、ベアリング表面と、コントローラとを備え、
第1及び第2の個別駆動型コンベヤベルトは、ベルトループを形成し、各コンベヤベルトは、幅方向に第1の側部から第2の側部へ且つ厚さ方向に外面から内面へ延び、第1及び第2のコンベヤベルトは、互いに平行に配設され、第1のコンベヤベルトの第1の側部は、第2のコンベヤベルトの第2の側部に隣接し、ループの一部はキャリーウエイを規定し、物品は、このキャリーウエイに沿って、キャリーウエイの上流端から逆の下流端へ外面に沿って搬送され、
第1及び第2のコンベヤベルトは、第1及び第2のコンベヤベルトの外面及び内面を超えて突出した複数のローラを有し、
ベアリング表面は、キャリーウエイの少なくとも一部に沿って第1及び第2のコンベヤベルトの下にあり、ローラは、第1及び第2のコンベヤベルトの内面から延びてベアリング表面と回転接触し、第1及び第2のコンベヤベルトがベルト移動の方向に進行するに従い回転し、
第1のローラトップベルト内のローラの各々は、第1のコンベヤベルトの第1の側部とローラの上流位置で交差する軸を中心として回転するように配列され、また第2のローラトップベルト内のローラの各々は、第2のコンベヤベルトの第2の側部とローラの上流位置で交差する軸を中心として回転するように配列され、
コントローラは、第1及び第2のコンベヤベルトの一方又は双方に結合されて、第1及び第2のコンベヤベルトのいずれかを、他方のコンベヤベルトが継続して進行する間に、選択的に停止することを特徴とするコンベヤ。
【請求項25】
被搬送物品の方位を示す信号をコントローラに送信するセンサを更に備え、コントローラは、前記信号から、第1及び第2のコンベヤベルトのいずれを停止するかを決定する請求項24に記載のコンベヤ。
【請求項26】
センサは、幾何学的構造を持つアレイ状に配列され、この幾何学的構造は、コントローラが、搬送される物品の長軸と、ベルト移動の方向に対する長軸の角方位とを、前記信号から決定可能にするように選択されたものである請求項25に記載のコンベヤ。
【請求項27】
コンベヤであって、第1のローラトップベルトと、第2のローラトップベルトと、ベアリング表面と、ドライブシステムとを備え、
第1のローラトップベルトは、キャリーウエイに沿ってベルト移動の方向に駆動されるように配設され、
第2のローラトップベルトは、キャリーウエイに沿って第1のローラトップベルトと平行に配設され、
ベアリング表面は、キャリーウエイの少なくとも一部に沿って第1及び第2のローラトップベルトの下にあり、
第1及び第2のローラトップベルトの各々は、キャリーウエイ内でベアリング表面に接触するローラを有して、ローラトップベルトがベルト移動の方向に駆動されるに従い、ローラを回転させ、
各ローラトップベルト上のローラは、ベアリング表面との接触によってローラが回転されるに従い、他方のローラトップベルトに向けられた成分を持つ力を被搬送物品に加えるように配列され、
ドライブシステムは、第1及び第2のローラトップベルトに結合されて、両ローラトップベルト上を搬送されている物品を回転させるに十分な時間、ローラトップベルトの一方を、他方がベルト移動の方向に進行している間に、選択的に停止させることを特徴とするコンベヤ。
【請求項28】
第1のローラトップベルトに結合されて、第1のローラトップベルトのベルト移動の方向への進行を始動及び停止する第1のドライブと、
第2のローラトップベルトに結合されて、第2のローラトップベルトのベルト移動の方向への進行を始動及び停止する第2のドライブと、
第1及び第2のドライブに結合されて、第1及び第2のローラトップコンベヤベルトの始動及び停止を制御するコントローラと
を更に備える請求項27に記載のコンベヤ。
【請求項29】
コンベヤ上を搬送される物品のサイズ及び方位を示す信号をコントローラに送信するセンサを更に備える請求項28に記載のコンベヤ。
【請求項30】
物品を回転させる方法であって、
幅方向に第1の側部から第2の側部へ延びると共にベルトの外面及び内面を超えて突出するローラを有し、且つベルトの第1の側部から反時計方向に測定された鋭角を形成する第1の軸を支えとして回転するように配列された第1のコンベヤベルトを選択する工程と、
幅方向に第1の側部から第2の側部へ延びると共にベルトの外面及び内面を超えて突出するローラを有し、且つベルトの第2の側部から時計方向に測定された鋭角を形成する第2の軸を支えとして回転するように配列された第2のコンベヤベルトを選択する工程と、
第1及び第2のコンベヤベルトを平行に、第1のコンベヤベルトの第1の側部を第2のコンベヤベルトの第2の側部に隣接させて配置する工程と、
第1及び第2のコンベヤベルトの一部を、底部表面を超えて突出するローラに接触する下側のベアリング表面上に支持して、ベルトが進行するに従って、ローラを回転させる工程と、
第1及び第2のコンベヤベルトをベルト移動の方向に進行させる工程と、
ベルト移動の方向に進行する第1及び第2のコンベヤベルトの外面を超えて突出するローラの上に物品を置く工程と、
第1及び第2のコンベヤベルトの一方が進行することを停止して、ベルトの他方が継続して進行するに従いローラ上の物品が回転することを防止する工程と
を備えることを特徴とする方法。
【請求項31】
センサのアレイを、物品の方位を検知する位置に配置する工程を更に備える請求項30に記載の方法。
【請求項32】
ローラ上の物品の方位を検知する工程を更に備える請求項30に記載の方法。
【請求項33】
物品の長軸の長さと、ベルト移動の方向に対する長軸の角方位とを決定する工程を更に備える請求項30に記載の方法。
【請求項34】
第1及び第2のコンベヤベルトのいずれか一方を選択して、物品の長軸の長さと長軸の角方位とに依存することを停止する工程を更に備える請求項33に記載の方法。
【請求項35】
第1及び第2のコンベヤベルトの一方が進行することを停止する間に、他方をスピードアップする工程を更に備える請求項30に記載の方法。
【図1】


【図2】
【図3A】
【図3B】
【図3C】
【図4】
【図5】
【図6A】
【図6B】

【図6C】
【図6D】
【図7A】

【図7B】

【図7C】

【図7D】
【図8A】

【図8B】
【図8C】
【図8D】
【図2】
【図3A】
【図3B】
【図3C】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図6D】
【図7A】
【図7B】
【図7C】
【図7D】
【図8A】
【図8B】
【図8C】
【図8D】
【公表番号】特表2008−532887(P2008−532887A)
【公表日】平成20年8月21日(2008.8.21)
【国際特許分類】
【出願番号】特願2008−500720(P2008−500720)
【出願日】平成18年2月14日(2006.2.14)
【国際出願番号】PCT/US2006/005279
【国際公開番号】WO2006/096292
【国際公開日】平成18年9月14日(2006.9.14)
【出願人】(506152704)レイトラム リミテッド ライアビリティー カンパニー (21)
【氏名又は名称原語表記】LAITRAM,L.L.C.
【Fターム(参考)】
【公表日】平成20年8月21日(2008.8.21)
【国際特許分類】
【出願日】平成18年2月14日(2006.2.14)
【国際出願番号】PCT/US2006/005279
【国際公開番号】WO2006/096292
【国際公開日】平成18年9月14日(2006.9.14)
【出願人】(506152704)レイトラム リミテッド ライアビリティー カンパニー (21)
【氏名又は名称原語表記】LAITRAM,L.L.C.
【Fターム(参考)】
[ Back to top ]