
傾斜作動式バルブステム作動装置
ディスペンスシステムは、容器(26)上のバルブに操作可能に接続される、傾斜作動式バルブステムと、バルブステムと連通する振動モータ(150)とを含む。振動モータ(150)は、作動されるとバルブステムに半径方向運動を付与すべく適合される。

【発明の詳細な説明】
【技術分野】
【0001】
本開示は容器用オーバーキャップに関し、より詳しくは、傾斜作動式バルブステムを有するエアゾール容器に配置されるべく適合されたオーバーキャップに関する。
【背景技術】
【0002】
エアゾール容器は、エアフレッシュナ、脱臭剤、殺虫剤、殺菌剤、充血除去薬、芳香などの揮発性物質を保管しディスペンス(放出)するために使用されることが一般的である。通常、揮発性物質は、圧縮された状態且つ液体状態で容器内に保管される。容器のリリースバルブは、圧縮された状態で収容されている揮発性物質の放出を制御する。通常、リリースバルブはバルブから外方向に延出するバルブステムを有する。バルブはバルブステムによって作動され、揮発性物質はバルブステムを通じて容器から流出する。このようなリリースバルブにおいて、バルブステムがバルブ本体に対して移動するとバルブが作動される。バルブステムはバルブステムの長手軸に沿って、すなわち軸方向に沿って移動してもよい。あるいは、バルブステムはバルブステムの長手軸を横切る方向、すなわち半径方向に傾斜され又は移動されてもよい。
【0003】
リリースバルブは自動システムにより作動されてもよく、あるいは手動で作動されてもよい。手動で作動される場合、ユーザは所望の放出を得るために要求される、バルブに付与される作動力を調節することができる。従って、一般的に、付与される力の要件を考察することは、手動で作動されるリリースバルブの設計においてはさほど重要でない。従来の作動装置機構には、ノズルを押下して容器内のバルブを開くために下方圧力を加える、モータで駆動されるリンケージを含むものがある。このような作動装置機構は一般的に使いにくい上、立ててあるいは手に持って使用するには適応が容易でない。また、このような作動装置機構では電力消費量が大きいことが多い。一般的に、傾斜作動式バルブステムを有するバルブは、垂直方向に作動されるバルブステムを有するバルブと比べ、作動に要する力が小さくてすむ。従って、作動の際に要する電力が小さいことから、作動力が小さくてすむリリースバルブは有利である。電力消費量が小さいため電源の耐用年数は長くなる。要求される力が小さいため、単純、小型及び/又は低コストの自動設計が可能となることから、作動力が小さいことは自動作動にも有利である。
【発明の概要】
【発明が解決しようとする課題】
【0004】
傾斜作動式バルブステムを有するバルブ用の既存の自動バルブ作動システムには、複雑且つ製造が困難なものがある。ギヤ、スプリング及び多数の可動部の正確な相互作用を含む複合システムの製造は高コストであり、また、複合システムは容器のオーバーキャップに嵌めるにはサイズが大きすぎる場合がある。また、複合システムの動作は多量の電力を必要とし、また構造が単純なシステムと比べてかなり故障しやすい。
【課題を解決するための手段】
【0005】
本発明の一態様によれば、ディスペンスシステム(放出システム)は、容器のバルブに操作可能に接続された、傾斜作動式バルブステムと、バルブステムと連通する振動モータと、を含み、振動モータは、作動されるとバルブステムに半径方向運動を付与すべく適合される。
【0006】
本発明の別の態様によれば、揮発性物質容器用オーバーキャップは、バルブに操作可能に接続される、傾斜作動式バルブステムを有する容器に取り付けられるべく適合されたハウジングを含む。振動モータはハウジング内に配置される。振動モータはバルブステムに半径方向変位を付与すべく適合される。
【0007】
本発明の更に別の態様によれば、揮発性物質容器用オーバーキャップは、バルブに操作可能に接続される、傾斜作動式バルブステムを有する容器に取り付けられるべく適合されたハウジングを含む。振動モータはハウジング内に配置される。振動モータはタイマ、センサ又は手動の作動装置のうち少なくとも1つからの信号に応じて作動され、バルブステムに半径方向変位を付与すべく適合される。
【0008】
本発明の別の態様において、液体をディスペンスする方法は、バルブに操作可能に接続される、傾斜作動式バルブステムを容器に設ける。異なるステップは、バルブステムに振動動作を付与する、ことを含み、振動動作はバルブステムに半径方向運動を付与する。
【0009】
本発明の別の態様において、ディスペンスシステムは、容器上に設けられる、バルブに操作可能に接続される、傾斜作動式バルブステムを含む。作動機構はバルブステムと振動連通する。作動機構は作動されるとバルブステムに半径方向運動を付与すべく適合される。
【0010】
本発明の更に別の態様において、ディスペンスシステムは、容器上に設けられる、バルブに操作可能に接続される、傾斜作動式バルブステムを含む。傾斜作動式バルブステムは非作動状態にあるとき非作動位置に配置される。傾斜作動式バルブステムは、作動状態にあるとき第一の作動位置と第二の作動位置との間で移動される。第一及び第二の作動位置は、非作動位置から半径方向にオフセットされている。
【図面の簡単な説明】
【0011】
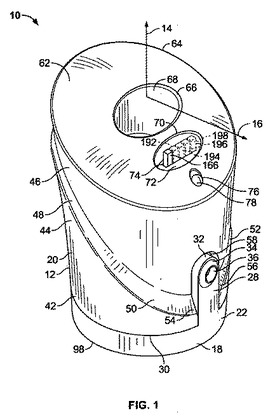
【図1】作動装置オーバーキャップの一実施形態の等角図である。
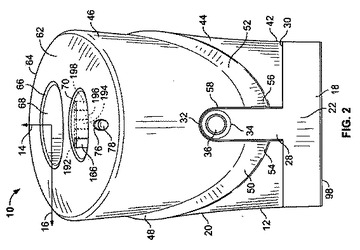
【図2】図1のオーバーキャップの正面図である。
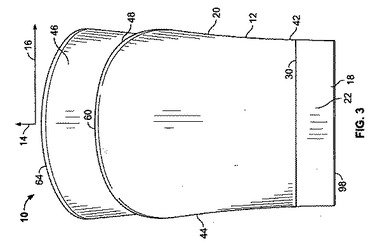
【図3】図1のオーバーキャップの背面図である。
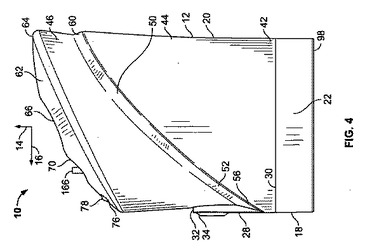
【図4】図1のオーバーキャップの右側正面図である。
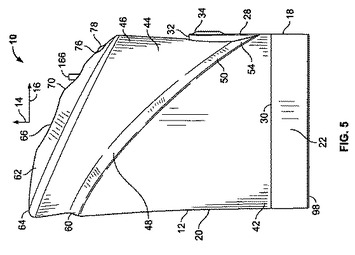
【図5】図1のオーバーキャップの左側正面図である。
【図6】図1のオーバーキャップの平面図である。
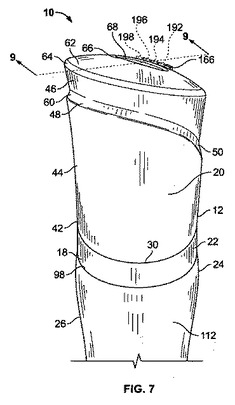
【図7】流体容器に取り付けられた図1のオーバーキャップの等角図である。
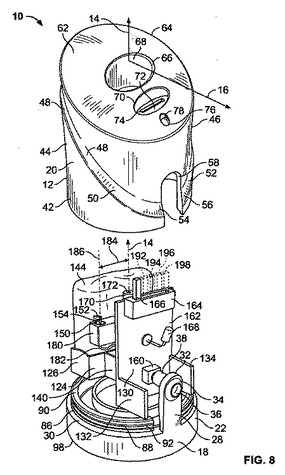
【図8】図1のオーバーキャップの分解等角図である。
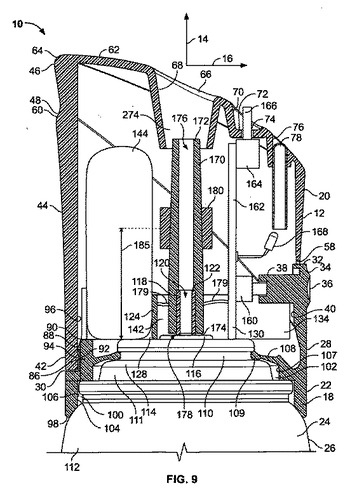
【図9】図7の断面線9−9に略沿った拡大部分断面図である。
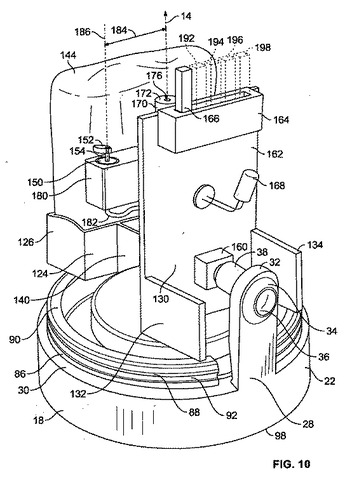
【図10】ハウジングの一部を取り除いて示す図1のオーバーキャップの等角図である。
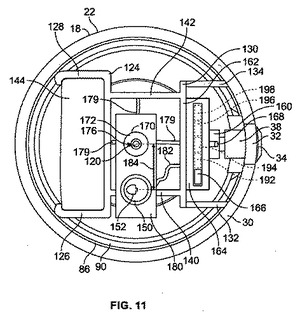
【図11】図10のオーバーキャップの平面図である。
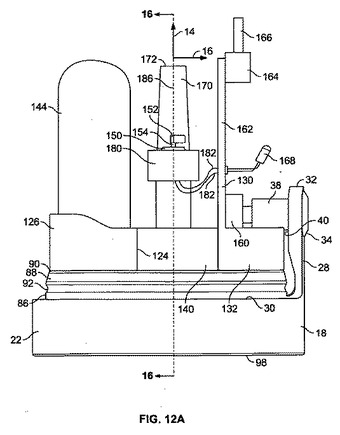
【図12A】振動モータの第一の向きを示す図10のオーバーキャップの左側正面図である。
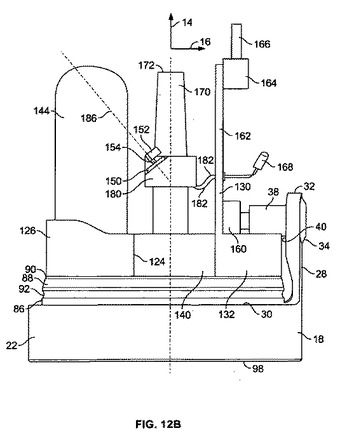
【図12B】振動モータの第二の向きを示す図10のオーバーキャップの左側正面図である。
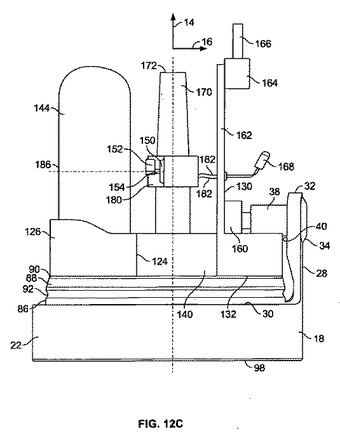
【図12C】振動モータの第三の向きを示す図10のオーバーキャップの左側正面図である。
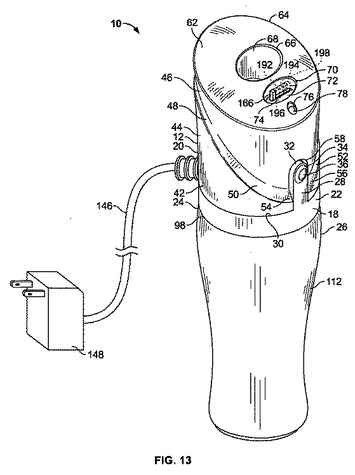
【図13】図7に示された実施形態と同様のオーバーキャップの、交流電源コネクタを含む別の実施形態を示す図である。
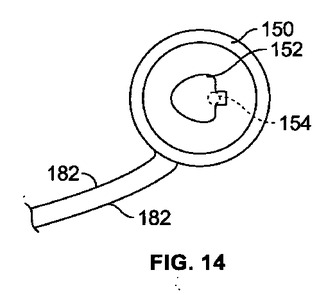
【図14】振動モータの平面図である。
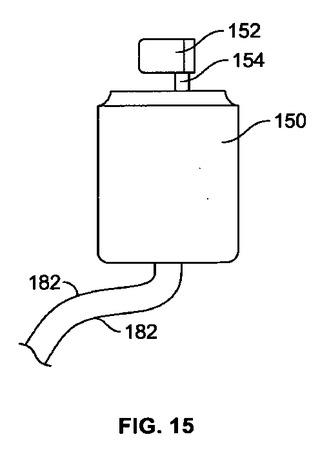
【図15】図14の振動モータの正面図である。
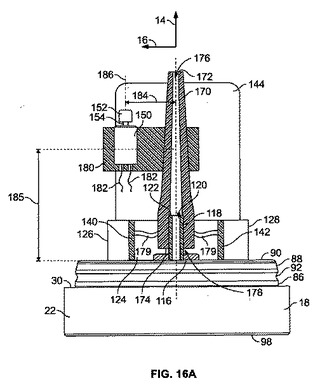
【図16A】流体容器の一部を更に含み、図12Aに示す振動モータの第一の向きを示す、図12Aの断面線16−16に略沿った部分断面図である。
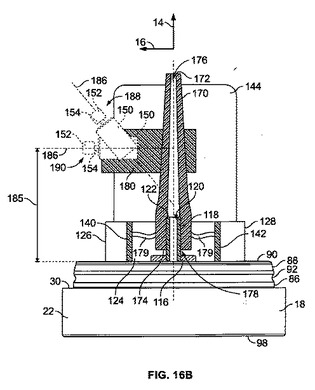
【図16B】流体容器の一部を更に含み、図示を簡潔にするためにワイヤを省略した、振動モータの第四及び第五の向きを示す図12Aの断面線16−16に略沿った部分断面図である。
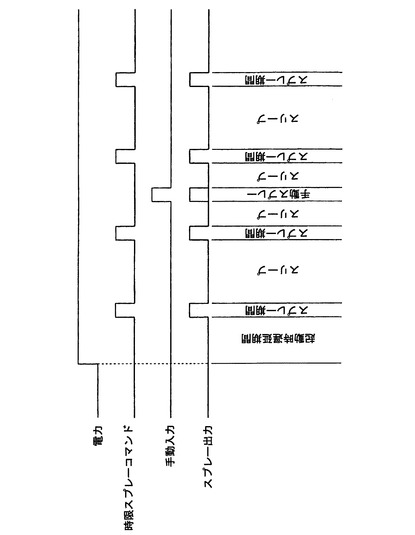
【図17】第一の操作シーケンスによる図1〜図16Bのオーバーキャップの動作を示すタイミング図である。
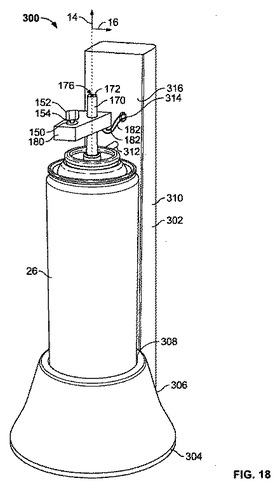
【図18】フレーム、流体容器及び振動モータを示すデバイスの別の実施形態の等角図である。
【発明を実施するための形態】
【0012】
本発明の他の態様及び利点は以下の詳細な説明を考察することで明白となる。同様の構造は同様の参照数字にて示される。
【0013】
図1〜図6は、長手軸14に沿った長手方向寸法及び半径方向軸16に沿った半径方向寸法を有する略円筒状ハウジング12を有する、作動装置オーバーキャップ10を表す。ハウジング12はベース部18及び除去可能キャップ20を含む。ベース部18は、図7に示す従来のエアゾール容器26の上端24に保持されるべく適合された円筒状部22を含む。ベース部18については以下に詳述する。ポスト28は、円筒状部22の上端30から上方へ延出する。ポスト28の外壁には楕円形状の押しボタン34を有する湾曲した遠位端32が設けられる。押しボタン34は、更に凹部36を有する。押しボタン34に略対向するポスト28の内壁40(図9を参照)には円筒状ロッド38(図8参照)が設けられる。
【0014】
除去可能キャップ20は、円筒状部22の上端30の直径と略等しい直径を有する円筒状底部42を含む。側壁44は除去可能キャップ20の底部42と頂部46との間に延在する。側壁44は、除去可能キャップ20の底部42に隣接する部分における断面直径が頂部46に隣接する部分における断面直径よりも小さくなるように、除去可能キャップ20の長手軸14に沿って外方向にテーパ状とされている。除去可能キャップ20の均等なテーパリングは、段差部48により切断される。段差部48は除去可能キャップ20の長手軸14の内方に延出する第一及び第二のテーパ面50及び52を含む。第一及び第二のテーパ面50及び52は、除去可能キャップ20の底部42に隣接する溝58の対向側に配置される第一の端部54、56をそれぞれ含む。テーパ面50及び52は、第一の端部54及び56から、除去可能キャップ20の、溝58に対向し且つ頂部46に隣接する部分60に向けて上方に湾曲している。
【0015】
除去可能キャップ20の上面62は凸面であり、周囲に円形の周縁64を有する。上面62の中央に楕円形状の放出オリフィス66が配置される。円錐台形壁68は、放出オリフィス66の周縁に沿って除去可能キャップ20の内部へ垂下する。湾曲した溝70は、放出オリフィス66と周縁64の間に配置される。溝70は、矩形ノッチ74を有する平面底72を含む。更にアパーチャ76が溝70と周縁64との間に設けられる。光透過性ロッド78が締まり嵌めによりアパーチャ76内に保持される。
【0016】
図8〜図12Cに示されるように、ベース部18は円筒状部22の上端30に配置されるプラットホーム86を含む。プラットホーム86の大きさは、除去可能キャップがベース部18に取り付けられる際に、除去可能キャップ20の底部42と摩擦係合すべく設定される。図9は、プラットホーム86が、側壁88及び頂部90を含む内方に段差を有する段差部を含むことを示している。側壁88は、底部42に隣接する除去可能キャップ20の内壁96上に環状部94を嵌合させて受け取るべく適合された周縁ノッチ92を含む。更に、溝58により付加的な保持サポートがなされる。溝58のサイズは、除去可能キャップ20がベース部18に配置される際に、ポスト28を嵌合させて受け取るべく設定される。除去可能キャップ20が部分22上に配置される際、ユーザは溝58をポスト28に対して位置合わせし、除去可能キャップ20をベース部18の上端30に当接するまで下方へ摺動させ、プラットホーム86との間に締まり嵌めを形成する。
【0017】
更に、ベース部18の下端98はエアゾール容器26の上端24に適合すべく形成される。図9は、本実施形態がベース部18の内周104に凹部100及び102を含むことを示している。凹部100は表面106によって定義され、凹部102は表面107によって定義される。表面107は、内方に突出する環状部108を含む。環状部108の遠位端109は、エアゾール容器26の取付カップ111のアンダーカット110との間にスナップ嵌めを形成する。表面106は、取付カップ110の下のエアゾール容器26の部分との間に締まり嵌めを形成する。環状部108とアンダーカット110の間のスナップ嵌め、及び表面106とエアゾール容器26の一部との間の締まり嵌めにより、エアゾール容器26にベース部18を安全に取り付ける際の支援がなされる。更に、ベース部18の下端98とエアゾール容器26の上端24とが当接することにより、エアゾール容器26に取り付けられた際に及びベース部18の振動あるいはシフトを防止する支援がなされてもよい。
【0018】
オーバーキャップ10の別の実施形態では、除去可能キャップ20及びベース部18は、締まり嵌めによってエアゾール容器26の上端24へ取り付けられる、一体形成されたユニットを形成する。実際には、ハウジング12が1つ以上の部品を含むか否かに関わらず、ハウジング12は当業者に知られている任意の方法でエアゾール容器26上に保持されることができる。例えばBalfanzの米国特許第4,133,408号、Demarestの米国特許第5,027,982号及びDemarestらの米国特許第5,609,605号に記載されているオーバーキャップ保持構造は、本願明細書中に記載されたいずれの実施形態においても使用できる。当該特許文献の全内容を参照によって本願明細書中に援用する。更に、本願明細書中に記載されたオーバーキャップ10の審美的態様は、いずれも当業者によって知られている任意の方法で変更できる。例えば、段差部48を取り除いてもよく、あるいはハウジング12が異なる形状を呈してもよい。
【0019】
オーバーキャップ10は、特定の条件の発生に伴い、エアゾール容器26から液体を放出する。条件として、オーバーキャップ10の手動による作動や、タイマ又はセンサからの電気信号に応じたオーバーキャップ10の自動的な作動が挙げられる。放出される液体は、キャリア液に分散された芳香又は殺虫剤、あるいは脱臭液であってもよい。液体は、更に消毒剤、エアフレッシュナ、臭気除去剤、カビ抑制剤、害虫忌避剤などの他の有効成分を含んでもよく、及び/又はアロマセラピーに関する特性を有していてもよい。あるいは、液体は、容器からディスペンスすることが可能な当業者に知られている任意の液体を含む。従って、オーバーキャップ10は任意の数の異なる流体構成をディスペンスすべく適合される。
【0020】
更に図9を参照すると、容器26は、当業者に知られている任意のサイズ及び容量を有するエアゾール容器とすることができる。但し、容器26は、上端24に圧着される取付カップ110を有する本体112(図13参照)を含むことが望ましい。取付カップ110は略円筒状であり、周囲に延出する外壁114を含む(図9参照)。台116は、取付カップ110から上方へ延出する。容器26内のバルブアセンブリ(図示せず)は、台116から上方へ延出するバルブステム118を含む。穴120はバルブアセンブリからバルブステム118まで延在する。バルブステム118は、Van der Heijdenの米国特許第4,064,782号に開示されるものと同様の、傾斜作動式タイプのバルブステムである。当該特許文献の全内容を参照によって本願明細書中に援用する。
【0021】
バルブステム118の遠位端が十分に、すなわち操作可能な位置へ、半径方向に傾斜されると、バルブアセンブリが開放され、容器26の内容物がバルブステム118の放出端122から放出される。本願明細書中に使用される線対称座標系の用語において、半径方向変位は、バルブステム118の遠位端の、長手軸14から離間する方向への移動をも含む。従って、このような半径方向変位は、バルブステム118の遠位端の横方向移動として特徴付けられてもよい。容器26の内容物は連続的に放出されることもでき、あるいは定量放出されることもできる。更に、容器26の内容物の放出は、任意の方法にて実施できる。例えば、放出は一部定量で放出されてもよく、あるいは多数回にわたり連続して放出されてもよい。
【0022】
図8〜図12C参照すると、第一の横壁124は、互いに対向する側に第一及び第二のフレーム部材126及び128を備えている。第一及び第二のフレーム部材126及び128はプラットホーム86の頂部90に取り付けられている。第二の横壁130は、互いに対向する側から延出し、同様にプラットホーム86の頂部90に取り付けられている、第三及び第四のフレーム部材132及び134を備えている。第三及び第四の横壁140及び142は、ベース18の構造を補強すべく設けられる。
【0023】
第一及び第二のフレーム部材126及び128は、1本以上の単3電池又は単4電池を含む直流電源144を保持すべく適合される。本実施形態の電源144は、他の電源との間にバッテリ互換性を示すべく概略的に示されている。諸実施形態において、バッテリは、導線146を有する再充電可能ニッケルカドミウム電池パックで置き換えられてもよい。導線146は図13に示すように交流電力コンセント148にバッテリーパックを接続すべく使用できる。別の実施形態では、直流電源144全体を、当業者に知られているような適切な電力変圧器及び交流/直流変換器を有する交流電源アダプタで置き換えることもできる。
【0024】
図14及び図15に示す振動モータ150などの作動機構はオーバーキャップ10の内側に設けられる。振動モータ150はエアゾール容器26からの液体の放出を発生させるべく適合されている。本実施形態では、振動モータ150は、振動モータ150のシャフト154に偏心的に取り付けられる、重りをつけたヘッド152を含む。重りをつけたヘッド152が偏心回転すると、振動モータ150のダイナミックインバランスが生じ、これにより振動モータ150が、振動モータ150に取り付けられた部材を振動させる。構造及び/又は設計特性が異なる多くのタイプの振動モータを本実施形態と関連付けて使用できることが想定されている。但し、ハウジング12内に嵌合可能な程度に小型であると共に、バルブステム118を変位させるに足る力を発生しうる振動モータを使用することが有利であることがわかっている。代表的な振動モータとして、北米パナソニック株式会社(Panasonic Corporation of North America)から入手可能なパナソニック製振動モータ(機種番号:KHN6)が挙げられる。KHN6モータは重量1.15グラム、定格1.3ボルト及び70ミリアンペア、回転数7,000rpmであり、0.76ニュートン(0.17ポンド)の出力を発生する。
【0025】
図8〜図12Cは、プリント基板162に配置される、通常は開放されているスイッチ160を示している。本実施形態では、プリント基板162は第二の横壁130の一部を含む。スイッチ160は、操作可能に押しボタンを手動で押下することにより開スイッチ160が閉止されるように、押しボタン34と位置合わせされている。更に、ユーザにより選択可能なスイッチアセンブリ164は、プリント基板162の頂部に隣接して配置される。ユーザにより選択可能なスイッチアセンブリ164は上方に延出するフィンガ166などの制御部材を含む。フィンガ166は異なる操作モード(以下に詳述する)を選択するために使用されてもよい。除去可能キャップ20がベース部18と係合すると、フィンガ166は、ユーザが操作によりフィンガ166と相互作用できるように、ノッチ74内に嵌合する(図1を参照)。ユーザにより選択可能なスイッチアセンブリ164は、本願明細書中に示されるような、フィンガ166によって制御される直線変位タイプのスイッチであってもよい。但し、ユーザにより選択可能なスイッチアセンブリは回転式であり、回転ノブにより制御可能であり、あるいは当該技術で知られている他の幾何学形状及び対応する制御機構を有していてもよい。更に、プリント基板162に配置された発光ダイオード(LED)168は、除去可能キャップ20の光透過性ロッド78に近接配置される(図9を参照)。
【0026】
図12A〜図12C、図16A及び図16Bを特に参照すると、ディスペンス部材170が示されている。本実施形態では、ディスペンス部材170は、放出端172及び下端174を有する円筒状部材を含む。ディスペンス部材の下端174に隣接する開口部178から放出端172を通じてボア176が延在している。ディスペンス部材170は、エアゾール容器26内のバルブアセンブリとディスペンス部材170の放出端172との間に連続流体連通を提供する。ディスペンス部材170は、圧入又は当業者に知られている他の方法によってバルブステム118に配置されてもよい。
【0027】
ハウジング12がエアゾール容器26に配置されると、バルブステム118の遠位端は、ディスペンス部材170の下端174に隣接している開口部178内に着座する。ディスペンス部材170の放出端172は、ハウジング12の放出オリフィス66から垂下する円錐台形壁68に隣接して及び/又は円錐台形壁68内に配置される。ディスペンス部材170は、ディスペンス部材170の放出端172を放出オリフィス66と位置合わせすべく適宜中央に配置される。他の実施形態では、ディスペンス部材170は非円筒形状を有し、及び/又は部材170の全体又は一部の長さにわたりその寸法を変化させる。例えば、ボア176の放出端172は、ボア176の他の部分より狭くてもよく、あるいはボア176の他の部分に対し角度を付けられていてもよい。更に、バルブステム118及びディスペンス部材170の長さを各々延長するボア120及び176の全て又は一部は円筒状であってもよく、あるいは他の形状であってもよい。例えば、放出端172に隣接しているボア176の一部は正方形の断面を有していてもよく、ボア176の残りの部分は略円形の断面を有していてもよい。
【0028】
ディスペンス部材170がオーバーキャップ10に取り付けられてもよいことが更に想定されている。この性質の取付手段により、ユーザの取り扱い性が向上し、ディスペンス部材170の損失の防止を支援でき、一体型のオーバーキャップ10に更なる利点を提供する。オーバーキャップ10にディスペンス部材170を接続する取付手段を有することの更なる利点として、ディスペンス部材170がガイド機能を備えることができる点が挙げられる。すなわち、オーバーキャップ10がエアゾール容器26に配置されるか、除去可能キャップ20がベース部18に配置されることで、ディスペンス部材170はバルブステム118と相互作用し、オーバーキャップ10及び/又は除去可能キャップ20を操作可能な位置へ向ける。あるいは、又はこれに加えて、エアゾール容器26にオーバーキャップ10を配置し、又はベース部18上に除去可能キャップ20を配置することにより、ディスペンス部材170のバルブステム118との係合を案内すべく位置合わせする機能が提供される。一実施形態において、ディスペンス部材170の下端174は、第一、第二、第三又は第四の横壁124、130、140、142の1つ以上に柔軟に取り付けられる。図9、図11、図16A及び16Bに示されるように、非伸張状態における弾性ストリップ179により、ディスペンス部材170が横壁124及び130に取り付けられる。図6及び図11は、ディスペンス部材170が別の弾性ストリップ179によって横壁142に取り付けられていることを示す。弾性ストリップ179は、オーバーキャップ10に固定された状態にディスペンス部材170を保持するに足る強度を有する。しかし、弾性ストリップ179は、振動モータ150により駆動されると、ディスペンス部材170の動的反応に対する干渉を最小限とするように、ディスペンス部材170に取り付けられている。ディスペンス部材170は、通常の技術を有する当業者には知られている他の方法によってオーバーキャップ10に取り付けられてもよい。
【0029】
本実施形態では、振動モータ150は、バルブステム118と振動連通するようにディスペンス部材170に取り付けられている。すなわち、振動モータ150は、振動モータ150の振動動作が直接的又は間接的にバルブステム118を変位させるように、オーバーキャップ10内に設けられる。振動モータ150は、ディスペンス部材170に直接接続されてもよいし、結合部材180を介してディスペンス部材170に接続されてもよい。結合部材180は、圧入、接着又は当業者に知られている他の方法によってディスペンス部材170に取り付けられてもよい。同様に、振動モータ150は、圧入、接着又は当業者に知られている他の方法によって結合部材180に取り付けられてもよい。別の実施形態では、振動モータ150は結合部材180を介してバルブステム118に接続されてもよい。他にも多数の接続構成が可能であることが想定されている。例えば、振動モータ150はバルブステム118に直接接続されてもよく、あるいはバルブステム118と振動連通する別の構造に取り付けられてもよい。プリント基板162はワイヤ182により振動モータ150に接続される。
【0030】
振動モータ150の非作動時には、ディスペンス部材172は長手軸14と位置合わせされている。振動モータ150が振動すると、バルブステム118へトルク量を供給すべくモーメントアームを通じて作用する力が発生する。これによりバルブステム118が作動され、エアゾール容器26の内容物を放出する。図8、図10、図11及び図16Aに示されるように、振動モータ150は長手軸14から距離184だけオフセットされたディスペンス部材170に取り付けられる。図8、図10、図12A及び図16Aに示されるように、シャフト154の回転軸186は長手軸14と平行の向きとされる。振動モータ150はディスペンス部材170の略中央近傍に取り付けられてもよい。あるいは、振動モータ150は、ディスペンス部材170の下端174又は放出端172の近傍、あるいはこれらの端部の間の任意の位置に取り付けられてもよい。距離185は、図9、図16A及び図16Bに示されるように振動モータ150の取付点と、傾斜作動式バルブステム118のベースとの間で測定され、好ましくは約0.25インチ〜約2インチの範囲である。更に、距離184は、好ましくは約0.25インチ〜約1インチの範囲である。モーメントアームの有効長は、長さ184及び185と、振動モータ150の向きとの幾何学的組合せによって決定される。例えば、振動モータ150をディスペンス部材170の放出端172の近傍に取り付けることにより、振動モータ150によって発生された力をバルブステム118に伝えるためのモーメントアームが長くなる。モーメントアームの有効長は、傾斜作動式バルブステム118のベースに作用するトルク量、従ってエアゾール容器26の内容物の噴射率を決定する一要素である。
【0031】
しかし、振動モータ150は、シャフト154の回転軸186が任意の向きにある状態でディスペンス部材170に取り付けられてもよい。例えば、振動モータ150は、図12Bに示されるように、シャフト154の回転軸186が長手軸14に対し45度の角度をなすように、ディスペンス部材170に取り付けられてもよい。また、振動モータ150は、図12Cに示されるように、シャフト154の回転軸186が長手軸14に対して略直交するようにディスペンス部材170に取り付けられてもよい。実際は、振動モータ150は、シャフト154の回転軸186が長手軸14に対し任意の角度をなしてディスペンス部材170に取り付けられることができる。
【0032】
更に、振動モータ150は、シャフト154の回転軸186が長手軸14と同一平面上にあるが平行ではないように、ディスペンス部材170に取り付けられてもよい。例えば、振動モータ150は、図16Bに破線で表された第一の位置188によって示されるように、シャフト154の回転軸186が長手軸14との間に45度の角度をなして同一平面上となるように、ディスペンス部材170に取り付けられてもよい。例えば、振動モータ150は、図16Bに破線で表された第二の位置190によって示されるように、シャフト154の回転軸186が長手軸14との間に90度の角度をなして同一平面上となるようにディスペンス部材170に取り付けられてもよい。
【0033】
更に、振動モータ150が、シャフト154の回転軸186と長手軸14との間で測定される角度が0度〜90度の間の任意の角度、例えば15度、30度、60度、75度であるように、ディスペンス部材170に取り付けられてもよいことが想定されている。実際、振動モータ150は、ディスペンス部材170に半径方向の振動変位を付与する上で有利とされる、長手軸14と回転軸186の間の他の相対的な向き又は向きの組合せでディスペンス部材170に取り付けられてもよい。
【0034】
ディスペンス部材170は、作動されると、振動モータ150により発生される力に応じて半径方向に振動変位し、半径方向の振動変位が起こる度にバルブステム118が作動する。ディスペンス部材170の変位頻度は、例えば、振動モータ150のオフセット距離184、振動モータ150の取付距離185、振動モータ150の向き、振動モータ150により発生される力、ディスペンス部材170及びバルブステム118の物理的特性を含む多数の要素に依存する。上述の代表的な振動モータの回転数7000rpmでは、振動変位は比較的高速で起こり、人には連続スプレーとして認識される。上記要素の1つ以上を変更することによりバルブステム118のディスペンス速度を変更できることが想定されている。例えば、製造中に、振動モータ150はバルブステム118から離間されたあるいは接近した距離184に配置されてもよく、ディスペンス部材170の放出端172又は下端174に接近して取り付けられてもよく、あるいは付加的な力を発生する別の振動モータと置き換えられてもよい。更に、ディスペンス部材170及び/又はバルブステム118により大きい動的反応を付与するため、弾力が高い又は低い別の材料を使用することもできる。別の例として、振動モータ150は定格電圧より僅かに高いもしくは低いいくつかの電圧レベルにおいてそれぞれ駆動されてもよい。各電圧レベルは振動モータ150に異なるレベルの力を発生させる。これらの力はバルブステム118のディスペンス速度に対応する。スイッチアセンブリ164に加えて、あるいはスイッチアセンブリ164の一部として、オーバーキャップ10にスイッチ機構が設けられてもよい。スイッチ機構はユーザが電圧レベルを選択し、従ってバルブステム118のディスペンス速度を選択することを可能とする。
【0035】
更に、バルブステム118に振動動作を付与すべく使用される作動機構は、振動モータ150以外の機構であってもよいことが想定されている。作動機構の一例として、ディスペンス部材170の外側面に接する回転カムが挙げられる。カムは駆動トランスミッションを介して小型モータによって駆動される。駆動トランスミッションはカムの回転を正確に制御し、これによりカムはディスペンス部材の振動変位を発生させるべく高速で繰り返し回転することができ、あるいはディスペンス部材を正確に変位させるように僅かな回転を与えるべく小さく回転することができる。作動機構の別の例として、磁気ディスペンス部材の近傍に配置される電磁石が挙げられる。電磁石が作動される度に、磁気ディスペンス部材と相互作用する磁界が発生し、磁気ディスペンス部材を半径方向に変位させる。電磁石が作動される度に発生される力の量、及び電磁石の作動頻度は、単純な回路類及び当業者に知られているような可変制御装置によって便宜に合わせ容易に制御できる。作動機構の更に別の例として、高周波音を発生する電子オシレータ回路が挙げられる。電子オシレータ回路は、電子オシレータ回路からの音をディスペンス部材170の表面へ向かわせるべくオーバーキャップに配置されてもよい。ディスペンス部材170は、音に動的反応を示す材料、すなわち定在波パターンにさらされた際に振動を示す材料で作製できる。傾斜作動式バルブステム118を作動するための更に別の作動機構も可能であり、有用である。例えば2007年5月10日出願の米国特許出願番号第11/801,557号に記載された作動機構のうちのいずれかを、バルブステム118に振動動作を付与すべく変更できる。当該特許出願の全開示内容を参照によって本願明細書中に援用する。
【0036】
ディスペンス部材170は、バルブステム118の半径方向の振動変位を含む所定の期間、すなわちスプレー期間にわたり、繰り返し半径方向に放出位置まで変位されることが望ましい。通常、スプレー期間は約170ミリ秒間継続してもよい。実際は、所望により、ディスペンス部材170は、容器内容物が枯渇するまで繰り返し半径方向に放出位置まで変位されてもよい。更に、ディスペンス部材170は、単一の作動信号の発生に応じて複数のスプレー期間にわたり繰り返し半径方向に移動されてもよい。スプレー期間はレスト期間により区分される。容器からの単一のスプレー期間を延長することが望ましくない場合、あるいは間欠放出が望まれる場合、多数のスプレー期間が存在することは有益となりうる。
【0037】
上述のごとくバルブステム118は各半径方向の振動変位により作動される。発振の全サイクルは、ディスペンス部材170の放出端172(又はバルブステム118)の第一の径方向における第一の最大偏位への移動、及びこれに続く第二の径方向における第二の最大偏位への動作を含む。第二の径方向は第一の径方向と正反対であってもよいし、そうでなくてもよい。第一の発振周期の後、バルブステム118及びディスペンス部材170が非作動位置へ戻る前に1つ以上の後続の発振周期が存在してもよい。従って、ディスペンス部材170の放出端172の振動変位の各全サイクルは、2点において最大半径方向変位を行う。バルブステム118が製品を放出する、放出端172の振動変位のサイクルに沿った任意の点を作動位置とみなすことができる。ディスペンス部材170が上記代表的な振動モータの回転速度に概ね相当する発振周波数に到達すると仮定すると、ディスペンス部材170の発振周波数は約7,000Hzに達する。一実施形態では、ディスペンス部材170によって到達可能な発振周波数の範囲は約1,000Hz〜約10,000Hzである。従って、ディスペンス部材の発振サイクルの期間は、約1ミリ秒〜約0.1ミリ秒の間で変化する。
【0038】
図17は、使用状態におけるオーバーキャップ10の動作を示すタイミング図である。まず、スイッチアセンブリ164のフィンガ166が「OFF」位置から4つの操作モード192、194、196及び198のうちの1つに移動されることによりオーバーキャップ10が作動される。次いで、制御回路(図示せず)がオーバーキャップ10を起動時遅延期間内とする。制御回路はプリント基板162にエッチングされていてもよい。4つの操作モード192、194、196、198の各々は、連続するスプレー期間の間の所定のスリープ期間に相当する。例えば、第一の操作モード192は5分間のスリープ期間に相当してもよく、第二の操作モード194は7.5分間のスリープ期間に相当してもよく、第三の操作モード196は15分間のスリープ期間に相当してもよく、第四の操作モード198は30分間のスリープ期間に相当してもよい。ここでは、第一の操作モード192が選択されたと仮定する。起動時遅延期間が満了すると、振動モータ150が作動され、第一のスプレー期間においてオーバーキャップ10から液体を放出する。好適な起動時遅延期間は約3秒間である。また、スプレー期間は通常約170ミリ秒間である。第一のスプレー期間が満了すると、オーバーキャップ10は、5分間の第一のスリープ期間に入る。第一のスリープ期間が満了すると、振動モータ150が作動され、第二のスプレー期間において液体を放出する。次いで、オーバーキャップ10は、5分間の第二のスリープ期間に入る。この例では、第二のスリープ期間はオーバーキャップ10が手動で作動されることにより中断される。液体は第三のスプレー期間にディスペンスされる。その後、スリープ期間とスプレー期間を交互に継続する自動運転が行われる。スリープ期間における任意の時点で、ユーザは押しボタン34を押下することにより選択可能な期間あるいは固定期間にわたりオーバーキャップ10を手動で作動させることができる。手動によるスプレー作業が終了すると、オーバーキャップ10は残りのスリープ期間を完了する。その後、スプレー作業が実施される。
【0039】
別の実施形態では、スイッチアセンブリ164は上記4つの個別の操作モード192、194、196、198に代えて連続した設定範囲を有していてもよい。このような実施形態では、スイッチアセンブリ164は、ダイヤル(図示せず)などのスイッチ機構を備えてもよい。スイッチ機構は、数時間又は数日間継続する連続するスプレー及び期間の間の、スプレー期間及び/又はスリープ期間の連続的なバリエーションをユーザに提供する。更に別の実施形態では、スイッチアセンブリ164は光電池光センサで置き換えられてもよく、及び/又は光電池光センサによりスイッチアセンブリ164を補ってもよい。光電池光センサは動作検出器として使用できる。パッシブ赤外線動作センサ又はピロ電気的動作センサ、赤外反射動作センサ、超音波動作センサ、レーダー又はマイクロ波による無線動作センサなどの、当業者に知られている他の動作検出器も利用できる。光電池は周辺光を集光し、これにより制御回路が光強度の変化を検出することが可能となる。光電池出力のフィルタリングは制御回路によって行われる。制御回路が閾値光条件に到達したと判断すると、すなわち例えば所定レベルの光強度変化が発生したことと判断すると、制御回路は振動モータ150を作動するための信号を生成する。例えば、オーバーキャップ10が明かりのついたバスルームに設置される場合、センサの前を通過する人がセンサに到達する十分な量の周辺光を遮断し、これにより制御回路が振動モータ150を作動させ、液体を放出させる。
【0040】
更に、スイッチアセンブリ164は、振動センサ、臭気センサ、熱感知器又は当業者に知られている他のセンサと置き換えられてもよく、あるいはこれを補うものであってもよいことが想定されている。あるいは、スイッチアセンブリ164の代わりに、あるいはスイッチアセンブリ164と組み合わされて1つ以上のセンサがオーバーキャップに設けられてもよい。当業者は、単独の又はスイッチアセンブリ164と組み合わされた任意のタイプのセンサを提供でき、及び/又はユーザの要求を満たす他のセンサを提供できることが想定されている。ある実施形態において、スイッチアセンブリ164とセンサとが同一のオーバーキャップ内に設けられる。このような実施形態では、ユーザは、オーバーキャップ10の振動モータ150を自動的に操作すべくタイマベースのスイッチアセンブリ164を使用することを選択してもよい。又は、ユーザは、オーバーキャップ10を作動させる前に所与の事象を検出すべくセンサを使用することを選択してもよい。あるいは、オーバーキャップ10は、タイマベース及びセンサベースの運転モードで同時に運転してもよい。
【0041】
オーバーキャップ10が作動状態にあるとき、LED168は光透過性ロッド78を照射する。スリープ期間中、LED168は15秒に1回断続的に明滅する。選択された操作モードに応じて、スプレー期間が近づくと、LED168の明滅回数が増大し始める。LED168による頻繁な照射は、オーバーキャップ10が流体内容物が空気中へ放出しようとしていることを視覚的に表示する。
【0042】
図18に表された別の実施形態では、エアゾール容器26はフレーム302を有するデバイス300内に配置される。フレーム302はベース部304及びテーパ状円筒壁306を含む。凹部308はベース部304内に設けられ、エアゾール容器26を受容すべく適合される。カラム310はベース部304と一体形成されると共に、ベース部304から上方へ延出する。カラム310はエアゾール容器26の最大長手方向寸法を越えて延出する。エアゾール容器26をカラム310から一定距離離間させて配置するため、フィンガ312がカラム310から延出している。振動モータ150は結合部材180によってディスペンス部材170に取り付けられている。ワイヤ182は、カラム310の前壁316のアパーチャ314を通って延出する。回路基板(図示せず)などの電子機器及び電源(図示せず)はカラム310内に収容される。本願明細書中に記載した任意の操作シーケンス又は方法論を含む操作シーケンスにおいて、フレーム302内の制御回路(図示せず)は、経時タイマ、センサ入力又は手動による作動に応答して電気信号を生成する。信号により振動モータ150が起動され、ディスペンス部材170に半径方向の振動力が加わる。上述のごとく、ディスペンス部材170に十分な半径方向の力が加わると、バルブステム118が半径方向に変位する。他の実施形態では、フレーム302は、エアゾール容器26を完全に包含する、より大きいハウジング(図示せず)の一部をなしてもよい。このようなハウジングはディスペンス部材170の放出端172と略位置合わせされる放出オリフィスを含む。ハウジングは、床や棚などの水平面上へ自立して設置されてもよいし、あるいは壁又は支持柱などの垂直面に取り付けられてもよい。
【0043】
本願明細書中に記載された実施形態はいずれも他の実施形態に関連して開示された任意の構造や方法論を含むように変更できる。更に、本発明は例示されたタイプのエアゾール容器に制限されない。また、本願明細書中に開示された実施形態のうちの任意のオーバーキャップを、傾斜作動式バルブステムを有する任意のタイプの流体容器と組み合わされて使用されるように変更できる。
【産業上の利用可能性】
【0044】
エアゾールディスペンサは、一般的に、エアゾール容器内に保管されるエアフレッシュナ、脱臭剤、殺虫剤、殺菌剤、充血除去薬、芳香などの揮発性物質をディスペンスするために使用される。エアゾール容器の自動バルブ作動システムにより、人間と相互作用することなくエアゾール容器の内容物が所定のタイムスケジュールに従って放出できる。一般的に、エアゾール容器リリースバルブ用の、傾斜作動式バルブステムは、垂直方向に作動されるバルブステムと比べ、作動に要する力が小さくてすむ。傾斜作動式バルブステムを振動モータにより自動的に作動するためのシステムが提示される。このシステムは、通常の、傾斜作動式エアゾール容器と共に使用されるように一般的なオーバーキャップ内に設置されることができ、これによりエアゾール容器の有用性が向上する。
【0045】
上記説明を考慮すれば、当業者には本発明に対する多数の変更が明らかとなる。従って、説明はあくまで例示目的で行われたものであり、当業者が本発明を実施及び使用できるようにし、本発明を実施するための最良の形態を教示すべく提示されたものであることを認識されたい。添付の特許請求の範囲に含まれるあらゆる変更に対し独占的権利が付与されている。
【0046】
関連出願への相互参照
適用なし
【0047】
連邦政府資金援助研究開発に関する参照
適用なし
【0048】
シーケンシャルリスト
適用なし
【技術分野】
【0001】
本開示は容器用オーバーキャップに関し、より詳しくは、傾斜作動式バルブステムを有するエアゾール容器に配置されるべく適合されたオーバーキャップに関する。
【背景技術】
【0002】
エアゾール容器は、エアフレッシュナ、脱臭剤、殺虫剤、殺菌剤、充血除去薬、芳香などの揮発性物質を保管しディスペンス(放出)するために使用されることが一般的である。通常、揮発性物質は、圧縮された状態且つ液体状態で容器内に保管される。容器のリリースバルブは、圧縮された状態で収容されている揮発性物質の放出を制御する。通常、リリースバルブはバルブから外方向に延出するバルブステムを有する。バルブはバルブステムによって作動され、揮発性物質はバルブステムを通じて容器から流出する。このようなリリースバルブにおいて、バルブステムがバルブ本体に対して移動するとバルブが作動される。バルブステムはバルブステムの長手軸に沿って、すなわち軸方向に沿って移動してもよい。あるいは、バルブステムはバルブステムの長手軸を横切る方向、すなわち半径方向に傾斜され又は移動されてもよい。
【0003】
リリースバルブは自動システムにより作動されてもよく、あるいは手動で作動されてもよい。手動で作動される場合、ユーザは所望の放出を得るために要求される、バルブに付与される作動力を調節することができる。従って、一般的に、付与される力の要件を考察することは、手動で作動されるリリースバルブの設計においてはさほど重要でない。従来の作動装置機構には、ノズルを押下して容器内のバルブを開くために下方圧力を加える、モータで駆動されるリンケージを含むものがある。このような作動装置機構は一般的に使いにくい上、立ててあるいは手に持って使用するには適応が容易でない。また、このような作動装置機構では電力消費量が大きいことが多い。一般的に、傾斜作動式バルブステムを有するバルブは、垂直方向に作動されるバルブステムを有するバルブと比べ、作動に要する力が小さくてすむ。従って、作動の際に要する電力が小さいことから、作動力が小さくてすむリリースバルブは有利である。電力消費量が小さいため電源の耐用年数は長くなる。要求される力が小さいため、単純、小型及び/又は低コストの自動設計が可能となることから、作動力が小さいことは自動作動にも有利である。
【発明の概要】
【発明が解決しようとする課題】
【0004】
傾斜作動式バルブステムを有するバルブ用の既存の自動バルブ作動システムには、複雑且つ製造が困難なものがある。ギヤ、スプリング及び多数の可動部の正確な相互作用を含む複合システムの製造は高コストであり、また、複合システムは容器のオーバーキャップに嵌めるにはサイズが大きすぎる場合がある。また、複合システムの動作は多量の電力を必要とし、また構造が単純なシステムと比べてかなり故障しやすい。
【課題を解決するための手段】
【0005】
本発明の一態様によれば、ディスペンスシステム(放出システム)は、容器のバルブに操作可能に接続された、傾斜作動式バルブステムと、バルブステムと連通する振動モータと、を含み、振動モータは、作動されるとバルブステムに半径方向運動を付与すべく適合される。
【0006】
本発明の別の態様によれば、揮発性物質容器用オーバーキャップは、バルブに操作可能に接続される、傾斜作動式バルブステムを有する容器に取り付けられるべく適合されたハウジングを含む。振動モータはハウジング内に配置される。振動モータはバルブステムに半径方向変位を付与すべく適合される。
【0007】
本発明の更に別の態様によれば、揮発性物質容器用オーバーキャップは、バルブに操作可能に接続される、傾斜作動式バルブステムを有する容器に取り付けられるべく適合されたハウジングを含む。振動モータはハウジング内に配置される。振動モータはタイマ、センサ又は手動の作動装置のうち少なくとも1つからの信号に応じて作動され、バルブステムに半径方向変位を付与すべく適合される。
【0008】
本発明の別の態様において、液体をディスペンスする方法は、バルブに操作可能に接続される、傾斜作動式バルブステムを容器に設ける。異なるステップは、バルブステムに振動動作を付与する、ことを含み、振動動作はバルブステムに半径方向運動を付与する。
【0009】
本発明の別の態様において、ディスペンスシステムは、容器上に設けられる、バルブに操作可能に接続される、傾斜作動式バルブステムを含む。作動機構はバルブステムと振動連通する。作動機構は作動されるとバルブステムに半径方向運動を付与すべく適合される。
【0010】
本発明の更に別の態様において、ディスペンスシステムは、容器上に設けられる、バルブに操作可能に接続される、傾斜作動式バルブステムを含む。傾斜作動式バルブステムは非作動状態にあるとき非作動位置に配置される。傾斜作動式バルブステムは、作動状態にあるとき第一の作動位置と第二の作動位置との間で移動される。第一及び第二の作動位置は、非作動位置から半径方向にオフセットされている。
【図面の簡単な説明】
【0011】
【図1】作動装置オーバーキャップの一実施形態の等角図である。
【図2】図1のオーバーキャップの正面図である。
【図3】図1のオーバーキャップの背面図である。
【図4】図1のオーバーキャップの右側正面図である。
【図5】図1のオーバーキャップの左側正面図である。
【図6】図1のオーバーキャップの平面図である。
【図7】流体容器に取り付けられた図1のオーバーキャップの等角図である。
【図8】図1のオーバーキャップの分解等角図である。
【図9】図7の断面線9−9に略沿った拡大部分断面図である。
【図10】ハウジングの一部を取り除いて示す図1のオーバーキャップの等角図である。
【図11】図10のオーバーキャップの平面図である。
【図12A】振動モータの第一の向きを示す図10のオーバーキャップの左側正面図である。
【図12B】振動モータの第二の向きを示す図10のオーバーキャップの左側正面図である。
【図12C】振動モータの第三の向きを示す図10のオーバーキャップの左側正面図である。
【図13】図7に示された実施形態と同様のオーバーキャップの、交流電源コネクタを含む別の実施形態を示す図である。
【図14】振動モータの平面図である。
【図15】図14の振動モータの正面図である。
【図16A】流体容器の一部を更に含み、図12Aに示す振動モータの第一の向きを示す、図12Aの断面線16−16に略沿った部分断面図である。
【図16B】流体容器の一部を更に含み、図示を簡潔にするためにワイヤを省略した、振動モータの第四及び第五の向きを示す図12Aの断面線16−16に略沿った部分断面図である。
【図17】第一の操作シーケンスによる図1〜図16Bのオーバーキャップの動作を示すタイミング図である。
【図18】フレーム、流体容器及び振動モータを示すデバイスの別の実施形態の等角図である。
【発明を実施するための形態】
【0012】
本発明の他の態様及び利点は以下の詳細な説明を考察することで明白となる。同様の構造は同様の参照数字にて示される。
【0013】
図1〜図6は、長手軸14に沿った長手方向寸法及び半径方向軸16に沿った半径方向寸法を有する略円筒状ハウジング12を有する、作動装置オーバーキャップ10を表す。ハウジング12はベース部18及び除去可能キャップ20を含む。ベース部18は、図7に示す従来のエアゾール容器26の上端24に保持されるべく適合された円筒状部22を含む。ベース部18については以下に詳述する。ポスト28は、円筒状部22の上端30から上方へ延出する。ポスト28の外壁には楕円形状の押しボタン34を有する湾曲した遠位端32が設けられる。押しボタン34は、更に凹部36を有する。押しボタン34に略対向するポスト28の内壁40(図9を参照)には円筒状ロッド38(図8参照)が設けられる。
【0014】
除去可能キャップ20は、円筒状部22の上端30の直径と略等しい直径を有する円筒状底部42を含む。側壁44は除去可能キャップ20の底部42と頂部46との間に延在する。側壁44は、除去可能キャップ20の底部42に隣接する部分における断面直径が頂部46に隣接する部分における断面直径よりも小さくなるように、除去可能キャップ20の長手軸14に沿って外方向にテーパ状とされている。除去可能キャップ20の均等なテーパリングは、段差部48により切断される。段差部48は除去可能キャップ20の長手軸14の内方に延出する第一及び第二のテーパ面50及び52を含む。第一及び第二のテーパ面50及び52は、除去可能キャップ20の底部42に隣接する溝58の対向側に配置される第一の端部54、56をそれぞれ含む。テーパ面50及び52は、第一の端部54及び56から、除去可能キャップ20の、溝58に対向し且つ頂部46に隣接する部分60に向けて上方に湾曲している。
【0015】
除去可能キャップ20の上面62は凸面であり、周囲に円形の周縁64を有する。上面62の中央に楕円形状の放出オリフィス66が配置される。円錐台形壁68は、放出オリフィス66の周縁に沿って除去可能キャップ20の内部へ垂下する。湾曲した溝70は、放出オリフィス66と周縁64の間に配置される。溝70は、矩形ノッチ74を有する平面底72を含む。更にアパーチャ76が溝70と周縁64との間に設けられる。光透過性ロッド78が締まり嵌めによりアパーチャ76内に保持される。
【0016】
図8〜図12Cに示されるように、ベース部18は円筒状部22の上端30に配置されるプラットホーム86を含む。プラットホーム86の大きさは、除去可能キャップがベース部18に取り付けられる際に、除去可能キャップ20の底部42と摩擦係合すべく設定される。図9は、プラットホーム86が、側壁88及び頂部90を含む内方に段差を有する段差部を含むことを示している。側壁88は、底部42に隣接する除去可能キャップ20の内壁96上に環状部94を嵌合させて受け取るべく適合された周縁ノッチ92を含む。更に、溝58により付加的な保持サポートがなされる。溝58のサイズは、除去可能キャップ20がベース部18に配置される際に、ポスト28を嵌合させて受け取るべく設定される。除去可能キャップ20が部分22上に配置される際、ユーザは溝58をポスト28に対して位置合わせし、除去可能キャップ20をベース部18の上端30に当接するまで下方へ摺動させ、プラットホーム86との間に締まり嵌めを形成する。
【0017】
更に、ベース部18の下端98はエアゾール容器26の上端24に適合すべく形成される。図9は、本実施形態がベース部18の内周104に凹部100及び102を含むことを示している。凹部100は表面106によって定義され、凹部102は表面107によって定義される。表面107は、内方に突出する環状部108を含む。環状部108の遠位端109は、エアゾール容器26の取付カップ111のアンダーカット110との間にスナップ嵌めを形成する。表面106は、取付カップ110の下のエアゾール容器26の部分との間に締まり嵌めを形成する。環状部108とアンダーカット110の間のスナップ嵌め、及び表面106とエアゾール容器26の一部との間の締まり嵌めにより、エアゾール容器26にベース部18を安全に取り付ける際の支援がなされる。更に、ベース部18の下端98とエアゾール容器26の上端24とが当接することにより、エアゾール容器26に取り付けられた際に及びベース部18の振動あるいはシフトを防止する支援がなされてもよい。
【0018】
オーバーキャップ10の別の実施形態では、除去可能キャップ20及びベース部18は、締まり嵌めによってエアゾール容器26の上端24へ取り付けられる、一体形成されたユニットを形成する。実際には、ハウジング12が1つ以上の部品を含むか否かに関わらず、ハウジング12は当業者に知られている任意の方法でエアゾール容器26上に保持されることができる。例えばBalfanzの米国特許第4,133,408号、Demarestの米国特許第5,027,982号及びDemarestらの米国特許第5,609,605号に記載されているオーバーキャップ保持構造は、本願明細書中に記載されたいずれの実施形態においても使用できる。当該特許文献の全内容を参照によって本願明細書中に援用する。更に、本願明細書中に記載されたオーバーキャップ10の審美的態様は、いずれも当業者によって知られている任意の方法で変更できる。例えば、段差部48を取り除いてもよく、あるいはハウジング12が異なる形状を呈してもよい。
【0019】
オーバーキャップ10は、特定の条件の発生に伴い、エアゾール容器26から液体を放出する。条件として、オーバーキャップ10の手動による作動や、タイマ又はセンサからの電気信号に応じたオーバーキャップ10の自動的な作動が挙げられる。放出される液体は、キャリア液に分散された芳香又は殺虫剤、あるいは脱臭液であってもよい。液体は、更に消毒剤、エアフレッシュナ、臭気除去剤、カビ抑制剤、害虫忌避剤などの他の有効成分を含んでもよく、及び/又はアロマセラピーに関する特性を有していてもよい。あるいは、液体は、容器からディスペンスすることが可能な当業者に知られている任意の液体を含む。従って、オーバーキャップ10は任意の数の異なる流体構成をディスペンスすべく適合される。
【0020】
更に図9を参照すると、容器26は、当業者に知られている任意のサイズ及び容量を有するエアゾール容器とすることができる。但し、容器26は、上端24に圧着される取付カップ110を有する本体112(図13参照)を含むことが望ましい。取付カップ110は略円筒状であり、周囲に延出する外壁114を含む(図9参照)。台116は、取付カップ110から上方へ延出する。容器26内のバルブアセンブリ(図示せず)は、台116から上方へ延出するバルブステム118を含む。穴120はバルブアセンブリからバルブステム118まで延在する。バルブステム118は、Van der Heijdenの米国特許第4,064,782号に開示されるものと同様の、傾斜作動式タイプのバルブステムである。当該特許文献の全内容を参照によって本願明細書中に援用する。
【0021】
バルブステム118の遠位端が十分に、すなわち操作可能な位置へ、半径方向に傾斜されると、バルブアセンブリが開放され、容器26の内容物がバルブステム118の放出端122から放出される。本願明細書中に使用される線対称座標系の用語において、半径方向変位は、バルブステム118の遠位端の、長手軸14から離間する方向への移動をも含む。従って、このような半径方向変位は、バルブステム118の遠位端の横方向移動として特徴付けられてもよい。容器26の内容物は連続的に放出されることもでき、あるいは定量放出されることもできる。更に、容器26の内容物の放出は、任意の方法にて実施できる。例えば、放出は一部定量で放出されてもよく、あるいは多数回にわたり連続して放出されてもよい。
【0022】
図8〜図12C参照すると、第一の横壁124は、互いに対向する側に第一及び第二のフレーム部材126及び128を備えている。第一及び第二のフレーム部材126及び128はプラットホーム86の頂部90に取り付けられている。第二の横壁130は、互いに対向する側から延出し、同様にプラットホーム86の頂部90に取り付けられている、第三及び第四のフレーム部材132及び134を備えている。第三及び第四の横壁140及び142は、ベース18の構造を補強すべく設けられる。
【0023】
第一及び第二のフレーム部材126及び128は、1本以上の単3電池又は単4電池を含む直流電源144を保持すべく適合される。本実施形態の電源144は、他の電源との間にバッテリ互換性を示すべく概略的に示されている。諸実施形態において、バッテリは、導線146を有する再充電可能ニッケルカドミウム電池パックで置き換えられてもよい。導線146は図13に示すように交流電力コンセント148にバッテリーパックを接続すべく使用できる。別の実施形態では、直流電源144全体を、当業者に知られているような適切な電力変圧器及び交流/直流変換器を有する交流電源アダプタで置き換えることもできる。
【0024】
図14及び図15に示す振動モータ150などの作動機構はオーバーキャップ10の内側に設けられる。振動モータ150はエアゾール容器26からの液体の放出を発生させるべく適合されている。本実施形態では、振動モータ150は、振動モータ150のシャフト154に偏心的に取り付けられる、重りをつけたヘッド152を含む。重りをつけたヘッド152が偏心回転すると、振動モータ150のダイナミックインバランスが生じ、これにより振動モータ150が、振動モータ150に取り付けられた部材を振動させる。構造及び/又は設計特性が異なる多くのタイプの振動モータを本実施形態と関連付けて使用できることが想定されている。但し、ハウジング12内に嵌合可能な程度に小型であると共に、バルブステム118を変位させるに足る力を発生しうる振動モータを使用することが有利であることがわかっている。代表的な振動モータとして、北米パナソニック株式会社(Panasonic Corporation of North America)から入手可能なパナソニック製振動モータ(機種番号:KHN6)が挙げられる。KHN6モータは重量1.15グラム、定格1.3ボルト及び70ミリアンペア、回転数7,000rpmであり、0.76ニュートン(0.17ポンド)の出力を発生する。
【0025】
図8〜図12Cは、プリント基板162に配置される、通常は開放されているスイッチ160を示している。本実施形態では、プリント基板162は第二の横壁130の一部を含む。スイッチ160は、操作可能に押しボタンを手動で押下することにより開スイッチ160が閉止されるように、押しボタン34と位置合わせされている。更に、ユーザにより選択可能なスイッチアセンブリ164は、プリント基板162の頂部に隣接して配置される。ユーザにより選択可能なスイッチアセンブリ164は上方に延出するフィンガ166などの制御部材を含む。フィンガ166は異なる操作モード(以下に詳述する)を選択するために使用されてもよい。除去可能キャップ20がベース部18と係合すると、フィンガ166は、ユーザが操作によりフィンガ166と相互作用できるように、ノッチ74内に嵌合する(図1を参照)。ユーザにより選択可能なスイッチアセンブリ164は、本願明細書中に示されるような、フィンガ166によって制御される直線変位タイプのスイッチであってもよい。但し、ユーザにより選択可能なスイッチアセンブリは回転式であり、回転ノブにより制御可能であり、あるいは当該技術で知られている他の幾何学形状及び対応する制御機構を有していてもよい。更に、プリント基板162に配置された発光ダイオード(LED)168は、除去可能キャップ20の光透過性ロッド78に近接配置される(図9を参照)。
【0026】
図12A〜図12C、図16A及び図16Bを特に参照すると、ディスペンス部材170が示されている。本実施形態では、ディスペンス部材170は、放出端172及び下端174を有する円筒状部材を含む。ディスペンス部材の下端174に隣接する開口部178から放出端172を通じてボア176が延在している。ディスペンス部材170は、エアゾール容器26内のバルブアセンブリとディスペンス部材170の放出端172との間に連続流体連通を提供する。ディスペンス部材170は、圧入又は当業者に知られている他の方法によってバルブステム118に配置されてもよい。
【0027】
ハウジング12がエアゾール容器26に配置されると、バルブステム118の遠位端は、ディスペンス部材170の下端174に隣接している開口部178内に着座する。ディスペンス部材170の放出端172は、ハウジング12の放出オリフィス66から垂下する円錐台形壁68に隣接して及び/又は円錐台形壁68内に配置される。ディスペンス部材170は、ディスペンス部材170の放出端172を放出オリフィス66と位置合わせすべく適宜中央に配置される。他の実施形態では、ディスペンス部材170は非円筒形状を有し、及び/又は部材170の全体又は一部の長さにわたりその寸法を変化させる。例えば、ボア176の放出端172は、ボア176の他の部分より狭くてもよく、あるいはボア176の他の部分に対し角度を付けられていてもよい。更に、バルブステム118及びディスペンス部材170の長さを各々延長するボア120及び176の全て又は一部は円筒状であってもよく、あるいは他の形状であってもよい。例えば、放出端172に隣接しているボア176の一部は正方形の断面を有していてもよく、ボア176の残りの部分は略円形の断面を有していてもよい。
【0028】
ディスペンス部材170がオーバーキャップ10に取り付けられてもよいことが更に想定されている。この性質の取付手段により、ユーザの取り扱い性が向上し、ディスペンス部材170の損失の防止を支援でき、一体型のオーバーキャップ10に更なる利点を提供する。オーバーキャップ10にディスペンス部材170を接続する取付手段を有することの更なる利点として、ディスペンス部材170がガイド機能を備えることができる点が挙げられる。すなわち、オーバーキャップ10がエアゾール容器26に配置されるか、除去可能キャップ20がベース部18に配置されることで、ディスペンス部材170はバルブステム118と相互作用し、オーバーキャップ10及び/又は除去可能キャップ20を操作可能な位置へ向ける。あるいは、又はこれに加えて、エアゾール容器26にオーバーキャップ10を配置し、又はベース部18上に除去可能キャップ20を配置することにより、ディスペンス部材170のバルブステム118との係合を案内すべく位置合わせする機能が提供される。一実施形態において、ディスペンス部材170の下端174は、第一、第二、第三又は第四の横壁124、130、140、142の1つ以上に柔軟に取り付けられる。図9、図11、図16A及び16Bに示されるように、非伸張状態における弾性ストリップ179により、ディスペンス部材170が横壁124及び130に取り付けられる。図6及び図11は、ディスペンス部材170が別の弾性ストリップ179によって横壁142に取り付けられていることを示す。弾性ストリップ179は、オーバーキャップ10に固定された状態にディスペンス部材170を保持するに足る強度を有する。しかし、弾性ストリップ179は、振動モータ150により駆動されると、ディスペンス部材170の動的反応に対する干渉を最小限とするように、ディスペンス部材170に取り付けられている。ディスペンス部材170は、通常の技術を有する当業者には知られている他の方法によってオーバーキャップ10に取り付けられてもよい。
【0029】
本実施形態では、振動モータ150は、バルブステム118と振動連通するようにディスペンス部材170に取り付けられている。すなわち、振動モータ150は、振動モータ150の振動動作が直接的又は間接的にバルブステム118を変位させるように、オーバーキャップ10内に設けられる。振動モータ150は、ディスペンス部材170に直接接続されてもよいし、結合部材180を介してディスペンス部材170に接続されてもよい。結合部材180は、圧入、接着又は当業者に知られている他の方法によってディスペンス部材170に取り付けられてもよい。同様に、振動モータ150は、圧入、接着又は当業者に知られている他の方法によって結合部材180に取り付けられてもよい。別の実施形態では、振動モータ150は結合部材180を介してバルブステム118に接続されてもよい。他にも多数の接続構成が可能であることが想定されている。例えば、振動モータ150はバルブステム118に直接接続されてもよく、あるいはバルブステム118と振動連通する別の構造に取り付けられてもよい。プリント基板162はワイヤ182により振動モータ150に接続される。
【0030】
振動モータ150の非作動時には、ディスペンス部材172は長手軸14と位置合わせされている。振動モータ150が振動すると、バルブステム118へトルク量を供給すべくモーメントアームを通じて作用する力が発生する。これによりバルブステム118が作動され、エアゾール容器26の内容物を放出する。図8、図10、図11及び図16Aに示されるように、振動モータ150は長手軸14から距離184だけオフセットされたディスペンス部材170に取り付けられる。図8、図10、図12A及び図16Aに示されるように、シャフト154の回転軸186は長手軸14と平行の向きとされる。振動モータ150はディスペンス部材170の略中央近傍に取り付けられてもよい。あるいは、振動モータ150は、ディスペンス部材170の下端174又は放出端172の近傍、あるいはこれらの端部の間の任意の位置に取り付けられてもよい。距離185は、図9、図16A及び図16Bに示されるように振動モータ150の取付点と、傾斜作動式バルブステム118のベースとの間で測定され、好ましくは約0.25インチ〜約2インチの範囲である。更に、距離184は、好ましくは約0.25インチ〜約1インチの範囲である。モーメントアームの有効長は、長さ184及び185と、振動モータ150の向きとの幾何学的組合せによって決定される。例えば、振動モータ150をディスペンス部材170の放出端172の近傍に取り付けることにより、振動モータ150によって発生された力をバルブステム118に伝えるためのモーメントアームが長くなる。モーメントアームの有効長は、傾斜作動式バルブステム118のベースに作用するトルク量、従ってエアゾール容器26の内容物の噴射率を決定する一要素である。
【0031】
しかし、振動モータ150は、シャフト154の回転軸186が任意の向きにある状態でディスペンス部材170に取り付けられてもよい。例えば、振動モータ150は、図12Bに示されるように、シャフト154の回転軸186が長手軸14に対し45度の角度をなすように、ディスペンス部材170に取り付けられてもよい。また、振動モータ150は、図12Cに示されるように、シャフト154の回転軸186が長手軸14に対して略直交するようにディスペンス部材170に取り付けられてもよい。実際は、振動モータ150は、シャフト154の回転軸186が長手軸14に対し任意の角度をなしてディスペンス部材170に取り付けられることができる。
【0032】
更に、振動モータ150は、シャフト154の回転軸186が長手軸14と同一平面上にあるが平行ではないように、ディスペンス部材170に取り付けられてもよい。例えば、振動モータ150は、図16Bに破線で表された第一の位置188によって示されるように、シャフト154の回転軸186が長手軸14との間に45度の角度をなして同一平面上となるように、ディスペンス部材170に取り付けられてもよい。例えば、振動モータ150は、図16Bに破線で表された第二の位置190によって示されるように、シャフト154の回転軸186が長手軸14との間に90度の角度をなして同一平面上となるようにディスペンス部材170に取り付けられてもよい。
【0033】
更に、振動モータ150が、シャフト154の回転軸186と長手軸14との間で測定される角度が0度〜90度の間の任意の角度、例えば15度、30度、60度、75度であるように、ディスペンス部材170に取り付けられてもよいことが想定されている。実際、振動モータ150は、ディスペンス部材170に半径方向の振動変位を付与する上で有利とされる、長手軸14と回転軸186の間の他の相対的な向き又は向きの組合せでディスペンス部材170に取り付けられてもよい。
【0034】
ディスペンス部材170は、作動されると、振動モータ150により発生される力に応じて半径方向に振動変位し、半径方向の振動変位が起こる度にバルブステム118が作動する。ディスペンス部材170の変位頻度は、例えば、振動モータ150のオフセット距離184、振動モータ150の取付距離185、振動モータ150の向き、振動モータ150により発生される力、ディスペンス部材170及びバルブステム118の物理的特性を含む多数の要素に依存する。上述の代表的な振動モータの回転数7000rpmでは、振動変位は比較的高速で起こり、人には連続スプレーとして認識される。上記要素の1つ以上を変更することによりバルブステム118のディスペンス速度を変更できることが想定されている。例えば、製造中に、振動モータ150はバルブステム118から離間されたあるいは接近した距離184に配置されてもよく、ディスペンス部材170の放出端172又は下端174に接近して取り付けられてもよく、あるいは付加的な力を発生する別の振動モータと置き換えられてもよい。更に、ディスペンス部材170及び/又はバルブステム118により大きい動的反応を付与するため、弾力が高い又は低い別の材料を使用することもできる。別の例として、振動モータ150は定格電圧より僅かに高いもしくは低いいくつかの電圧レベルにおいてそれぞれ駆動されてもよい。各電圧レベルは振動モータ150に異なるレベルの力を発生させる。これらの力はバルブステム118のディスペンス速度に対応する。スイッチアセンブリ164に加えて、あるいはスイッチアセンブリ164の一部として、オーバーキャップ10にスイッチ機構が設けられてもよい。スイッチ機構はユーザが電圧レベルを選択し、従ってバルブステム118のディスペンス速度を選択することを可能とする。
【0035】
更に、バルブステム118に振動動作を付与すべく使用される作動機構は、振動モータ150以外の機構であってもよいことが想定されている。作動機構の一例として、ディスペンス部材170の外側面に接する回転カムが挙げられる。カムは駆動トランスミッションを介して小型モータによって駆動される。駆動トランスミッションはカムの回転を正確に制御し、これによりカムはディスペンス部材の振動変位を発生させるべく高速で繰り返し回転することができ、あるいはディスペンス部材を正確に変位させるように僅かな回転を与えるべく小さく回転することができる。作動機構の別の例として、磁気ディスペンス部材の近傍に配置される電磁石が挙げられる。電磁石が作動される度に、磁気ディスペンス部材と相互作用する磁界が発生し、磁気ディスペンス部材を半径方向に変位させる。電磁石が作動される度に発生される力の量、及び電磁石の作動頻度は、単純な回路類及び当業者に知られているような可変制御装置によって便宜に合わせ容易に制御できる。作動機構の更に別の例として、高周波音を発生する電子オシレータ回路が挙げられる。電子オシレータ回路は、電子オシレータ回路からの音をディスペンス部材170の表面へ向かわせるべくオーバーキャップに配置されてもよい。ディスペンス部材170は、音に動的反応を示す材料、すなわち定在波パターンにさらされた際に振動を示す材料で作製できる。傾斜作動式バルブステム118を作動するための更に別の作動機構も可能であり、有用である。例えば2007年5月10日出願の米国特許出願番号第11/801,557号に記載された作動機構のうちのいずれかを、バルブステム118に振動動作を付与すべく変更できる。当該特許出願の全開示内容を参照によって本願明細書中に援用する。
【0036】
ディスペンス部材170は、バルブステム118の半径方向の振動変位を含む所定の期間、すなわちスプレー期間にわたり、繰り返し半径方向に放出位置まで変位されることが望ましい。通常、スプレー期間は約170ミリ秒間継続してもよい。実際は、所望により、ディスペンス部材170は、容器内容物が枯渇するまで繰り返し半径方向に放出位置まで変位されてもよい。更に、ディスペンス部材170は、単一の作動信号の発生に応じて複数のスプレー期間にわたり繰り返し半径方向に移動されてもよい。スプレー期間はレスト期間により区分される。容器からの単一のスプレー期間を延長することが望ましくない場合、あるいは間欠放出が望まれる場合、多数のスプレー期間が存在することは有益となりうる。
【0037】
上述のごとくバルブステム118は各半径方向の振動変位により作動される。発振の全サイクルは、ディスペンス部材170の放出端172(又はバルブステム118)の第一の径方向における第一の最大偏位への移動、及びこれに続く第二の径方向における第二の最大偏位への動作を含む。第二の径方向は第一の径方向と正反対であってもよいし、そうでなくてもよい。第一の発振周期の後、バルブステム118及びディスペンス部材170が非作動位置へ戻る前に1つ以上の後続の発振周期が存在してもよい。従って、ディスペンス部材170の放出端172の振動変位の各全サイクルは、2点において最大半径方向変位を行う。バルブステム118が製品を放出する、放出端172の振動変位のサイクルに沿った任意の点を作動位置とみなすことができる。ディスペンス部材170が上記代表的な振動モータの回転速度に概ね相当する発振周波数に到達すると仮定すると、ディスペンス部材170の発振周波数は約7,000Hzに達する。一実施形態では、ディスペンス部材170によって到達可能な発振周波数の範囲は約1,000Hz〜約10,000Hzである。従って、ディスペンス部材の発振サイクルの期間は、約1ミリ秒〜約0.1ミリ秒の間で変化する。
【0038】
図17は、使用状態におけるオーバーキャップ10の動作を示すタイミング図である。まず、スイッチアセンブリ164のフィンガ166が「OFF」位置から4つの操作モード192、194、196及び198のうちの1つに移動されることによりオーバーキャップ10が作動される。次いで、制御回路(図示せず)がオーバーキャップ10を起動時遅延期間内とする。制御回路はプリント基板162にエッチングされていてもよい。4つの操作モード192、194、196、198の各々は、連続するスプレー期間の間の所定のスリープ期間に相当する。例えば、第一の操作モード192は5分間のスリープ期間に相当してもよく、第二の操作モード194は7.5分間のスリープ期間に相当してもよく、第三の操作モード196は15分間のスリープ期間に相当してもよく、第四の操作モード198は30分間のスリープ期間に相当してもよい。ここでは、第一の操作モード192が選択されたと仮定する。起動時遅延期間が満了すると、振動モータ150が作動され、第一のスプレー期間においてオーバーキャップ10から液体を放出する。好適な起動時遅延期間は約3秒間である。また、スプレー期間は通常約170ミリ秒間である。第一のスプレー期間が満了すると、オーバーキャップ10は、5分間の第一のスリープ期間に入る。第一のスリープ期間が満了すると、振動モータ150が作動され、第二のスプレー期間において液体を放出する。次いで、オーバーキャップ10は、5分間の第二のスリープ期間に入る。この例では、第二のスリープ期間はオーバーキャップ10が手動で作動されることにより中断される。液体は第三のスプレー期間にディスペンスされる。その後、スリープ期間とスプレー期間を交互に継続する自動運転が行われる。スリープ期間における任意の時点で、ユーザは押しボタン34を押下することにより選択可能な期間あるいは固定期間にわたりオーバーキャップ10を手動で作動させることができる。手動によるスプレー作業が終了すると、オーバーキャップ10は残りのスリープ期間を完了する。その後、スプレー作業が実施される。
【0039】
別の実施形態では、スイッチアセンブリ164は上記4つの個別の操作モード192、194、196、198に代えて連続した設定範囲を有していてもよい。このような実施形態では、スイッチアセンブリ164は、ダイヤル(図示せず)などのスイッチ機構を備えてもよい。スイッチ機構は、数時間又は数日間継続する連続するスプレー及び期間の間の、スプレー期間及び/又はスリープ期間の連続的なバリエーションをユーザに提供する。更に別の実施形態では、スイッチアセンブリ164は光電池光センサで置き換えられてもよく、及び/又は光電池光センサによりスイッチアセンブリ164を補ってもよい。光電池光センサは動作検出器として使用できる。パッシブ赤外線動作センサ又はピロ電気的動作センサ、赤外反射動作センサ、超音波動作センサ、レーダー又はマイクロ波による無線動作センサなどの、当業者に知られている他の動作検出器も利用できる。光電池は周辺光を集光し、これにより制御回路が光強度の変化を検出することが可能となる。光電池出力のフィルタリングは制御回路によって行われる。制御回路が閾値光条件に到達したと判断すると、すなわち例えば所定レベルの光強度変化が発生したことと判断すると、制御回路は振動モータ150を作動するための信号を生成する。例えば、オーバーキャップ10が明かりのついたバスルームに設置される場合、センサの前を通過する人がセンサに到達する十分な量の周辺光を遮断し、これにより制御回路が振動モータ150を作動させ、液体を放出させる。
【0040】
更に、スイッチアセンブリ164は、振動センサ、臭気センサ、熱感知器又は当業者に知られている他のセンサと置き換えられてもよく、あるいはこれを補うものであってもよいことが想定されている。あるいは、スイッチアセンブリ164の代わりに、あるいはスイッチアセンブリ164と組み合わされて1つ以上のセンサがオーバーキャップに設けられてもよい。当業者は、単独の又はスイッチアセンブリ164と組み合わされた任意のタイプのセンサを提供でき、及び/又はユーザの要求を満たす他のセンサを提供できることが想定されている。ある実施形態において、スイッチアセンブリ164とセンサとが同一のオーバーキャップ内に設けられる。このような実施形態では、ユーザは、オーバーキャップ10の振動モータ150を自動的に操作すべくタイマベースのスイッチアセンブリ164を使用することを選択してもよい。又は、ユーザは、オーバーキャップ10を作動させる前に所与の事象を検出すべくセンサを使用することを選択してもよい。あるいは、オーバーキャップ10は、タイマベース及びセンサベースの運転モードで同時に運転してもよい。
【0041】
オーバーキャップ10が作動状態にあるとき、LED168は光透過性ロッド78を照射する。スリープ期間中、LED168は15秒に1回断続的に明滅する。選択された操作モードに応じて、スプレー期間が近づくと、LED168の明滅回数が増大し始める。LED168による頻繁な照射は、オーバーキャップ10が流体内容物が空気中へ放出しようとしていることを視覚的に表示する。
【0042】
図18に表された別の実施形態では、エアゾール容器26はフレーム302を有するデバイス300内に配置される。フレーム302はベース部304及びテーパ状円筒壁306を含む。凹部308はベース部304内に設けられ、エアゾール容器26を受容すべく適合される。カラム310はベース部304と一体形成されると共に、ベース部304から上方へ延出する。カラム310はエアゾール容器26の最大長手方向寸法を越えて延出する。エアゾール容器26をカラム310から一定距離離間させて配置するため、フィンガ312がカラム310から延出している。振動モータ150は結合部材180によってディスペンス部材170に取り付けられている。ワイヤ182は、カラム310の前壁316のアパーチャ314を通って延出する。回路基板(図示せず)などの電子機器及び電源(図示せず)はカラム310内に収容される。本願明細書中に記載した任意の操作シーケンス又は方法論を含む操作シーケンスにおいて、フレーム302内の制御回路(図示せず)は、経時タイマ、センサ入力又は手動による作動に応答して電気信号を生成する。信号により振動モータ150が起動され、ディスペンス部材170に半径方向の振動力が加わる。上述のごとく、ディスペンス部材170に十分な半径方向の力が加わると、バルブステム118が半径方向に変位する。他の実施形態では、フレーム302は、エアゾール容器26を完全に包含する、より大きいハウジング(図示せず)の一部をなしてもよい。このようなハウジングはディスペンス部材170の放出端172と略位置合わせされる放出オリフィスを含む。ハウジングは、床や棚などの水平面上へ自立して設置されてもよいし、あるいは壁又は支持柱などの垂直面に取り付けられてもよい。
【0043】
本願明細書中に記載された実施形態はいずれも他の実施形態に関連して開示された任意の構造や方法論を含むように変更できる。更に、本発明は例示されたタイプのエアゾール容器に制限されない。また、本願明細書中に開示された実施形態のうちの任意のオーバーキャップを、傾斜作動式バルブステムを有する任意のタイプの流体容器と組み合わされて使用されるように変更できる。
【産業上の利用可能性】
【0044】
エアゾールディスペンサは、一般的に、エアゾール容器内に保管されるエアフレッシュナ、脱臭剤、殺虫剤、殺菌剤、充血除去薬、芳香などの揮発性物質をディスペンスするために使用される。エアゾール容器の自動バルブ作動システムにより、人間と相互作用することなくエアゾール容器の内容物が所定のタイムスケジュールに従って放出できる。一般的に、エアゾール容器リリースバルブ用の、傾斜作動式バルブステムは、垂直方向に作動されるバルブステムと比べ、作動に要する力が小さくてすむ。傾斜作動式バルブステムを振動モータにより自動的に作動するためのシステムが提示される。このシステムは、通常の、傾斜作動式エアゾール容器と共に使用されるように一般的なオーバーキャップ内に設置されることができ、これによりエアゾール容器の有用性が向上する。
【0045】
上記説明を考慮すれば、当業者には本発明に対する多数の変更が明らかとなる。従って、説明はあくまで例示目的で行われたものであり、当業者が本発明を実施及び使用できるようにし、本発明を実施するための最良の形態を教示すべく提示されたものであることを認識されたい。添付の特許請求の範囲に含まれるあらゆる変更に対し独占的権利が付与されている。
【0046】
関連出願への相互参照
適用なし
【0047】
連邦政府資金援助研究開発に関する参照
適用なし
【0048】
シーケンシャルリスト
適用なし
【特許請求の範囲】
【請求項1】
容器のバルブに操作可能に接続された、傾斜作動式バルブステムと、
前記バルブステムと連通する振動モータと、
を含み、
前記振動モータは、作動されると前記バルブステムに半径方向運動を付与すべく適合される、
ディスペンスシステム。
【請求項2】
前記振動モータは、前記バルブステムに配置されたディスペンス部材に取り付けられ、前記ディスペンス部材は前記バルブステムと流体連通する、請求項1記載のディスペンスシステム。
【請求項3】
前記振動モータは結合部材によって前記ディスペンス部材に取り付けられている請求項2記載のディスペンスシステム。
【請求項4】
前記振動モータは結合部材によって前記バルブステムに取り付けられている請求項1記載のディスペンスシステム。
【請求項5】
前記制御回路は前記振動モータを断続的に作動させるべく適合されている請求項1記載のディスペンスシステム。
【請求項6】
前記制御回路はタイマからの信号を受信すると前記振動モータを断続的に作動すべく適合される請求項5記載のディスペンスシステム。
【請求項7】
前記制御回路は、手動による作動装置から信号を受信すると振動モータを作動すべく適合される請求項1記載のディスペンスシステム。
【請求項8】
バルブに操作可能に接続される、傾斜作動式バルブステムを有する容器に取り付けられるべく適合されたハウジングと、
前記ハウジング内に配置される振動モータと、
を含み、
前記振動モータはバルブステムに半径方向変位を付与すべく適合される、
揮発性物質容器用オーバーキャップ。
【請求項9】
前記ハウジングは前記振動モータに電力を供給すべく適合された電源を含む請求項8記載のオーバーキャップ。
【請求項10】
前記ハウジングは交流コンセントに差し込まれるべく適合された導線を含む請求項8記載のオーバーキャップ。
【請求項11】
前記ハウジングは、制御回路による前記振動モータの断続的な作動間のタイマ間隔を調節するためのスイッチアセンブリを含む請求項8記載のオーバーキャップ。
【請求項12】
前記ハウジングは、制御回路に前記振動モータを作動させる信号を生成するための手動操作ボタンを含む請求項8記載のオーバーキャップ。
【請求項13】
前記ハウジングは、バルブに操作可能に接続された、傾斜作動式バルブステムを有する容器に取り付けられる請求項8記載のオーバーキャップ。
【請求項14】
バルブに操作可能に接続される、傾斜作動式バルブステムを有する容器に取り付けられるべく適合されたハウジングと、
前記ハウジング内に配置された振動モータと、
を含み、
前記振動モータはタイマ、センサ又は手動の作動装置のうち少なくとも1つからの信号に応じて作動され、前記バルブステムに半径方向変位を付与すべく適合される、
揮発性物質容器用オーバーキャップ。
【請求項15】
前記センサは光電池光センサである請求項14記載のオーバーキャップ。
【請求項16】
タイマの運転間隔をユーザ選択により調節することを可能とするためのスイッチアセンブリが設けられる請求項14記載のオーバーキャップ。
【請求項17】
前記スイッチアセンブリは、運転間隔を連続的に変化させる調節を提供すべく適合される請求項16記載のオーバーキャップ。
【請求項18】
前記ハウジングは、バルブに操作可能に接続される、傾斜作動式バルブステムを有する容器に取り付けられる請求項16記載のオーバーキャップ。
【請求項19】
バルブに操作可能に接続される、傾斜作動式バルブステムを容器に設け、
前記バルブステムに振動動作を付与する、
ことを含み、
前記振動動作は前記バルブステムに半径方向運動を付与する、
液体をディスペンスする方法。
【請求項20】
容器上に設けられる、バルブに操作可能に接続される、傾斜作動式バルブステムと、
前記バルブステムと振動連通する作動機構と、
を含み、
前記作動機構は作動されると前記バルブステムに半径方向運動を付与すべく適合される、
ディスペンスシステム。
【請求項21】
容器上に設けられる、バルブに操作可能に接続される、傾斜作動式バルブステムを含み、
前記傾斜作動式バルブステムは、非作動状態にあるとき非作動位置に配置され、
前記傾斜作動式バルブステムは、作動状態にあるとき第一の作動位置と第二の作動位置との間で移動され、
前記第一及び第二の作動位置は、前記非作動位置から半径方向にオフセットされている、
ディスペンスシステム。
【請求項22】
振動モータは、前記第一の作動位置と前記第二の作動位置との間で、前記傾斜作動式バルブステムを移動させる請求項21記載のディスペンスシステム。
【請求項23】
作動機構は、前記第一の作動位置と前記第二の作動位置との間で、前記傾斜作動式バルブステムを移動させる請求項21記載のディスペンスシステム。
【請求項24】
前記傾斜作動式バルブステムは、作動状態において、複数の前記第一の作動位置及び前記第二の作動位置との間で移動される請求項23記載のディスペンスシステム。
【請求項25】
前記傾斜作動式バルブステムは、約0.5ミリ秒〜約0.05ミリ秒の期間に前記第一の作動位置と前記第二の作動位置との間で移動される請求項23記載のディスペンスシステム。
【請求項1】
容器のバルブに操作可能に接続された、傾斜作動式バルブステムと、
前記バルブステムと連通する振動モータと、
を含み、
前記振動モータは、作動されると前記バルブステムに半径方向運動を付与すべく適合される、
ディスペンスシステム。
【請求項2】
前記振動モータは、前記バルブステムに配置されたディスペンス部材に取り付けられ、前記ディスペンス部材は前記バルブステムと流体連通する、請求項1記載のディスペンスシステム。
【請求項3】
前記振動モータは結合部材によって前記ディスペンス部材に取り付けられている請求項2記載のディスペンスシステム。
【請求項4】
前記振動モータは結合部材によって前記バルブステムに取り付けられている請求項1記載のディスペンスシステム。
【請求項5】
前記制御回路は前記振動モータを断続的に作動させるべく適合されている請求項1記載のディスペンスシステム。
【請求項6】
前記制御回路はタイマからの信号を受信すると前記振動モータを断続的に作動すべく適合される請求項5記載のディスペンスシステム。
【請求項7】
前記制御回路は、手動による作動装置から信号を受信すると振動モータを作動すべく適合される請求項1記載のディスペンスシステム。
【請求項8】
バルブに操作可能に接続される、傾斜作動式バルブステムを有する容器に取り付けられるべく適合されたハウジングと、
前記ハウジング内に配置される振動モータと、
を含み、
前記振動モータはバルブステムに半径方向変位を付与すべく適合される、
揮発性物質容器用オーバーキャップ。
【請求項9】
前記ハウジングは前記振動モータに電力を供給すべく適合された電源を含む請求項8記載のオーバーキャップ。
【請求項10】
前記ハウジングは交流コンセントに差し込まれるべく適合された導線を含む請求項8記載のオーバーキャップ。
【請求項11】
前記ハウジングは、制御回路による前記振動モータの断続的な作動間のタイマ間隔を調節するためのスイッチアセンブリを含む請求項8記載のオーバーキャップ。
【請求項12】
前記ハウジングは、制御回路に前記振動モータを作動させる信号を生成するための手動操作ボタンを含む請求項8記載のオーバーキャップ。
【請求項13】
前記ハウジングは、バルブに操作可能に接続された、傾斜作動式バルブステムを有する容器に取り付けられる請求項8記載のオーバーキャップ。
【請求項14】
バルブに操作可能に接続される、傾斜作動式バルブステムを有する容器に取り付けられるべく適合されたハウジングと、
前記ハウジング内に配置された振動モータと、
を含み、
前記振動モータはタイマ、センサ又は手動の作動装置のうち少なくとも1つからの信号に応じて作動され、前記バルブステムに半径方向変位を付与すべく適合される、
揮発性物質容器用オーバーキャップ。
【請求項15】
前記センサは光電池光センサである請求項14記載のオーバーキャップ。
【請求項16】
タイマの運転間隔をユーザ選択により調節することを可能とするためのスイッチアセンブリが設けられる請求項14記載のオーバーキャップ。
【請求項17】
前記スイッチアセンブリは、運転間隔を連続的に変化させる調節を提供すべく適合される請求項16記載のオーバーキャップ。
【請求項18】
前記ハウジングは、バルブに操作可能に接続される、傾斜作動式バルブステムを有する容器に取り付けられる請求項16記載のオーバーキャップ。
【請求項19】
バルブに操作可能に接続される、傾斜作動式バルブステムを容器に設け、
前記バルブステムに振動動作を付与する、
ことを含み、
前記振動動作は前記バルブステムに半径方向運動を付与する、
液体をディスペンスする方法。
【請求項20】
容器上に設けられる、バルブに操作可能に接続される、傾斜作動式バルブステムと、
前記バルブステムと振動連通する作動機構と、
を含み、
前記作動機構は作動されると前記バルブステムに半径方向運動を付与すべく適合される、
ディスペンスシステム。
【請求項21】
容器上に設けられる、バルブに操作可能に接続される、傾斜作動式バルブステムを含み、
前記傾斜作動式バルブステムは、非作動状態にあるとき非作動位置に配置され、
前記傾斜作動式バルブステムは、作動状態にあるとき第一の作動位置と第二の作動位置との間で移動され、
前記第一及び第二の作動位置は、前記非作動位置から半径方向にオフセットされている、
ディスペンスシステム。
【請求項22】
振動モータは、前記第一の作動位置と前記第二の作動位置との間で、前記傾斜作動式バルブステムを移動させる請求項21記載のディスペンスシステム。
【請求項23】
作動機構は、前記第一の作動位置と前記第二の作動位置との間で、前記傾斜作動式バルブステムを移動させる請求項21記載のディスペンスシステム。
【請求項24】
前記傾斜作動式バルブステムは、作動状態において、複数の前記第一の作動位置及び前記第二の作動位置との間で移動される請求項23記載のディスペンスシステム。
【請求項25】
前記傾斜作動式バルブステムは、約0.5ミリ秒〜約0.05ミリ秒の期間に前記第一の作動位置と前記第二の作動位置との間で移動される請求項23記載のディスペンスシステム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12A】
【図12B】
【図12C】
【図13】
【図14】
【図15】
【図16A】
【図16B】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12A】
【図12B】
【図12C】
【図13】
【図14】
【図15】
【図16A】
【図16B】
【図17】
【図18】
【公表番号】特表2010−537895(P2010−537895A)
【公表日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願番号】特願2010−521015(P2010−521015)
【出願日】平成20年8月13日(2008.8.13)
【国際出願番号】PCT/US2008/009661
【国際公開番号】WO2009/023208
【国際公開日】平成21年2月19日(2009.2.19)
【出願人】(500106743)エス.シー. ジョンソン アンド サン、インコーポレイテッド (168)
【Fターム(参考)】
【公表日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願日】平成20年8月13日(2008.8.13)
【国際出願番号】PCT/US2008/009661
【国際公開番号】WO2009/023208
【国際公開日】平成21年2月19日(2009.2.19)
【出願人】(500106743)エス.シー. ジョンソン アンド サン、インコーポレイテッド (168)
【Fターム(参考)】
[ Back to top ]