
傾斜角算出装置及びナビゲーション装置
【課題】 車両自体の傾斜角を求めて、道路のみの傾斜角を正確に算出可能とする。
【解決手段】 ナビゲーション装置1は、車両の前後に取り付けるステレオカメラ10、11を具備し、水平的な姿勢における各ステレオカメラ10、11による算出距離に対応した基準距離D1、D2及び各ステレオカメラ10、11のレンズ中心間の水平距離を記憶部9に予め記憶している。各ステレオカメラ10、11が撮像した画像情報に基づき画像演算処理部8は地面までの距離を求め、求めた距離と基準距離との差及びレンズ中心間の水平距離等より三角関数を用いて車両自体の傾斜角(車両傾斜角)を算出する。算出した車両傾斜角で3Dジャイロセンサー5の検出結果より求めた傾斜角を補正して道路のみの傾斜角を得る。
【解決手段】 ナビゲーション装置1は、車両の前後に取り付けるステレオカメラ10、11を具備し、水平的な姿勢における各ステレオカメラ10、11による算出距離に対応した基準距離D1、D2及び各ステレオカメラ10、11のレンズ中心間の水平距離を記憶部9に予め記憶している。各ステレオカメラ10、11が撮像した画像情報に基づき画像演算処理部8は地面までの距離を求め、求めた距離と基準距離との差及びレンズ中心間の水平距離等より三角関数を用いて車両自体の傾斜角(車両傾斜角)を算出する。算出した車両傾斜角で3Dジャイロセンサー5の検出結果より求めた傾斜角を補正して道路のみの傾斜角を得る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、乗車人数、積載荷物の有無、車両の加減速等に基づく車両自体の傾斜角を正確に算出すると共に、地面のみの傾斜角を算出可能にした傾斜角算出装置、及び該傾斜角算出装置で得られた地面の傾斜角を用いて良好なマップマッチング処理を行うナビゲーション装置に関する。
【背景技術】
【0002】
従来、車両等に搭載されて目的地までのルート案内を行うナビゲーション装置が普及している。ナビゲーション装置は一般に、GPS(Global Positioning System)を利用して位置情報を受信すると共に、ナビゲーション装置が具備する各種センサー及び車両側から取得する車速パルス等に基づき現在の車両位置を算出し、目的地までの道順を表示するものである。算出した現在の車両位置を地図上に表示する際、算出誤差等が原因となって地図上の道路位置に、求めた車両位置が一致しないことがあるが、このような場合、ナビゲーション装置は車両位置が妥当な道路上に載るようにマップマッチング処理を行う。
【0003】
近時、マップマッチング処理の精度を高めるために、二次元的な平面における車両の位置情報(緯度、経度)に加えて、加速度センサー等の各種検出結果より水平レベルに対する車両の傾斜角を求め、その求めた傾斜角を利用してマップマッチング処理を行うナビゲーション装置が存在する。例えば、高架道路への進入道路及びその進入道路に一般道路が併行するような場所でマップマッチング処理を行う場合、求めた傾斜角より進入道路又は一般道路のいずれをマップマッチング先にするかを判断することが可能になる(特許文献1参照)。
【0004】
また、下記の特許文献2では、車両の状態を検出する各種センサーの検出結果の累積誤差の影響を可及的に抑制し、現在の車両位置を正確に表示できるようにしたナビゲーション装置が開示されている。
【特許文献1】特開2002−277266号公報
【特許文献2】特開平8−285621号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
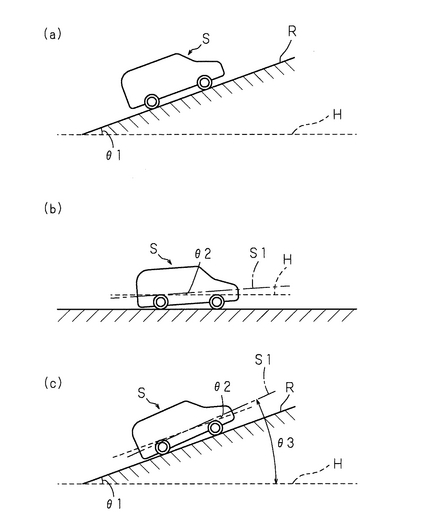
従来の車両の傾斜角の求め方では、車両が位置する道路のみの傾斜角を正確に算出できないと云う問題がある。例えば、図8(a)に示すように、傾斜した道路Rに位置する車両Sが前後で重量的にバランスの取れた状態であり、且つ加減速を行っていない場合、車両Sに搭載されたナビゲーション装置で求める傾斜角θ1は、水平レベルHに対する道路Rの傾斜角に一致する。
【0006】
しかし、図8(b)に示すように、乗車人数又は積載荷物等により前後の重量的なバランスが取れていない場合、車両Sが加減速している場合等には、車両Sが水平な道路に位置していても車体(ボディ)の水平的な中心線S1は水平レベルHと平行にならず、車両自体の傾斜角として車両傾斜角θ2が生じる(図8(b)は前上がりの状態を示す)。よって、このように車両傾斜角θ2が生じると、ナビゲーション装置は車両傾斜角θ2を検出し、実際には水平な道路を走行中であっても傾斜した道路を走行していると判断し誤ったマップマッチング処理を行うおそれが生じる。
【0007】
さらに、図8(c)に示すように、図8(b)の車両状態で図8(a)のような傾斜した道路Rを走行すると、ナビゲーション装置は傾斜角θ3(θ1+θ2)を検出し、正確に道路Rのみの傾斜角を検出できないため、この場合も誤ったマップマッチング処理を行うおそれがある。
【0008】
一方、上述した特許文献1に係るナビゲーション装置で検出できる傾斜角は図8(c)に示す車両自体の傾斜角と道路の傾斜角が合わさった傾斜角θ3であるため、特許文献1に係るナビゲーション装置は道路のみの傾斜角をセンサー等の検出結果に基づいて算出できない。さらに、特許文献2に係るナビゲーション装置では、車両の停車時のみにセンサー等の補正値を使用するに留まるため、車両の走行中では道路のみの傾斜角を求めることはできない。
【0009】
また、道路のみの傾斜角だけでなく車両傾斜角を正確に求めることは、車両に対する各種制御を行う上で重要であり、例えば、図8(b)に示す車両Sのピッチ方向(前後方向)の車両傾斜角θ2を求めると、その車両傾斜角θ2は車両の加減速制御、電子制御サスペンションに対するピッチ方向の姿勢制御等に利用できる。さらに、車両Sのロール方向(左右方向)の傾斜角を求めると、そのロール方向の傾斜角は電子制御サスペンションに対するロール方向の姿勢制御、車両の操舵制御、トルク配分制御等にも利用できる。そのため、車両の各方向における傾斜角を正確に求めることは、車両の各種制御に対して意義が大きい。
【0010】
本発明は、斯かる事情に鑑みてなされたものであり、地面までの距離を求めることにより、水平レベルに対する車両の各方向の傾斜角を正確に算出可能にした傾斜角算出装置を提供することを目的とする。
また、本発明は、正確に求めた車両自体の傾斜角で算出された全体的な傾斜角の値を補正して道路のみの正確な傾斜角を求められるようにした傾斜角算出装置を提供することを目的とする。
さらに、本発明は、求めた道路のみの傾斜角を利用して適切なマップマッチング処理を行えるようにしたナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記課題を解決するために第1発明に係る傾斜角算出装置は、車両の水平レベルに対する傾斜角を算出する車載用の傾斜角算出装置において、車両の一部から地面までの基準距離を記憶する記憶手段と、前記車両の一部から地面までの距離に係る情報を取得する距離情報取得手段と、該距離情報取得手段が取得した情報に基づいて距離を算出する距離算出手段と、該距離算出手段が算出した距離及び前記基準距離の距離差より車両自体の車両傾斜角を算出する車両傾斜角算出手段とを備えることを特徴とする。
【0012】
第1発明にあっては、車両の一部から地面までの距離(車体の水平中心線に対して鉛直方向の距離)を基準距離として予め記憶すると共に、前記車両の一部から地面までの距離に係る情報を取得して距離を算出し、算出した距離と基準距離との差を求めて、その差より車両自体の車両傾斜角を算出するので、加速度センサー及びジャイロセンサー等のセンサーの検出結果を利用しないで正確に車両のみの傾斜角を得ることが可能になる。このように得られた車両傾斜角は、ナビゲーション装置におけるマップマッチング処理、及び車両の各種制御に用いることができる。なお、できるだけ高精度の車両傾斜角を得る観点から、基準距離となる値は水平的な場所に位置する水平的な姿勢の車両に対して得られた距離を用いることが好ましい。
【0013】
第2発明に係る傾斜角算出装置は、車両の水平レベルに対する傾斜角に係る情報を取得する傾斜角情報取得手段と、該傾斜角情報取得手段が取得した情報に基づいて傾斜角を算出する傾斜角算出手段とを備える車載用の傾斜角算出装置において、車両の一部から地面までの距離を基準距離として記憶する記憶手段と、前記車両の一部から地面までの距離に係る情報を取得する距離情報取得手段と、該距離情報取得手段が取得した情報に基づいて距離を算出する距離算出手段と、該距離算出手段が算出した距離及び前記基準距離の距離差より車両自体の車両傾斜角を算出する車両傾斜角算出手段と、該車両傾斜角算出手段が算出した車両傾斜角及び前記傾斜角算出手段が算出した傾斜角の角度差より地面の傾斜角を算出する地面傾斜角算出手段とを備えることを特徴とする。
【0014】
第2発明にあっては、第1発明と同様にして車両傾斜角を求めると共に、傾斜角情報取得手段及び傾斜角算出手段により得た傾斜角に対する車両傾斜角の角度差を求めることで、全体的な傾斜角を車両傾斜角で補正して地面のみの傾斜角を得られるようになる。その結果、車両が如何なる姿勢であっても正確に地面のみの傾斜角を確実に得ることが可能になる。
【0015】
第3発明に係る傾斜角算出装置は、前記距離情報取得手段は、情報を複数回取得するようにしてあり、前記距離算出手段は、前記距離情報取得手段が取得した複数回の情報毎に算出した距離の平均化処理を行うことを特徴とする。
第3発明にあっては、取得された複数回の情報毎に算出した距離に対して平均化処理を行うので、取得された情報に含まれる誤差の影響を低減できるようになり、平均化処理を経て得られた距離の精度を向上できる。
【0016】
第4発明に係る傾斜角算出装置は、前記距離情報取得手段は、複数であり、複数の距離情報取得手段は、車両の相異する部分で地面までの距離に係る情報を取得するようにしてあり、前記距離算出手段は、前記複数の距離情報取得手段が取得したそれぞれの情報に基づいて車両の相異する部分毎に距離を算出するようにしてあり、前記記憶手段は、車両の相異する部分毎に複数の基準距離を記憶しており、前記車両傾斜角算出手段は、車両の相異する部分毎での距離及び基準距離の距離差、並びに前記複数の距離情報取得手段の水平間隔より車両傾斜角を算出するようにしてあることを特徴とする。
【0017】
第4発明にあっては、複数の距離情報取得手段を用いて車両の相異する部分のそれぞれで地面までの距離に係る情報を取得して距離を求めると共に、車両の相異する部分で求めた距離差及び各距離情報取得手段の間の水平間隔と云う複数の要素を用いて車両傾斜角を算出するので、スムーズに車両傾斜角を求められる上に算出精度を一段と向上できる。即ち、車両の相異する部分で求められる距離差と各距離情報取得手段の水平間隔とが判明することで、車両姿勢の現状を詳細に反映できると共に算出処理に三角関数の演算を用いることが可能になり、算出処理の効率化を図れる。
【0018】
第5発明に係る傾斜角算出装置は、前記距離情報取得手段は、2つであり、一方の距離情報取得手段は、車両の前部分で地面までの距離に係る情報を取得するようにしてあり、他方の距離情報取得手段は、車両の後部分で地面までの距離に係る情報を取得するようにしてあることを特徴とする。
第5発明にあっては、2つの距離情報取得手段の中の一方で車両の前部分に対する距離情報を取得すると共に、他方で車両の後ろ部分に対する距離情報を取得するので、車両のピッチ方向における傾斜角を確実に算出することが可能になる。
【0019】
第6発明に係る傾斜角算出装置は、前記距離情報取得手段は、同一物体に対して視差を含む画像を取得することが可能な撮像手段、超音波を出射して反射波を取り入れる超音波出入手段、又は光線を出射して反射光線を取り入れる光線出入手段のいずれかであることを特徴とする。
【0020】
第6発明にあっては、距離情報取得手段として、視差を含む画像(ステレオ画像)を撮像できる手段、超音波の出入を行える手段、又はレーザ光のような光線の出入を行える手段のいずれかを用いるので確実に距離に係る情報を取得して、正確な車両傾斜角の算出及び地面の傾斜角の算出に貢献できる。ステレオ画像を撮像できる手段を用いる場合は、地面の質(アスファルト、コンクリート、土等)及び地面の凹凸等の地面状況によらず安定した情報取得が可能である。また、超音波の出入を行える手段及び光線の出入を行える手段は、天候(晴天時、雨天時等)及び周囲の明暗等の影響に左右されることなく情報取得を行える。
【0021】
第7発明に係るナビゲーション装置は、位置情報を受信する位置情報受信手段と、該位置情報受信手段が受信した位置情報に基づいて算出した位置を地図上の道路に合致させるマップマッチング処理を行うマップマッチング手段とを備えるナビゲーション装置において、上述したいずれかの構成の傾斜角算出装置と、傾斜程度に差がある複数の道路が近接する場所で前記マップマッチング手段がマップマッチング処理を行う場合、前記傾斜角算出装置が算出した地面の傾斜角に基づいてマップマッチング先の道路を特定する手段とを備えることを特徴とする。
【0022】
第7発明にあっては、上述した傾斜角算出装置で算出した地面の傾斜角に基づいてマップマッチング先の道路を特定するので、傾斜程度に差がある複数の道路が近接する場所でも正確にマップマッチング処理を行えるようになり、ナビゲーション処理における位置表示に対する信頼性を向上できる。
【発明の効果】
【0023】
第1発明にあっては、車両の一部から地面までの基準距離を予め記憶すると共に、前記車両の一部から地面までの距離に係る情報を取得して距離を算出し、算出した距離と基準距離との差を求めて車両傾斜角を算出するので、車両が位置する道路の傾斜角の影響を受けることなく、車両のみの正確な傾斜角(車両傾斜角)を得られる。
第2発明にあっては、第1発明と同様にして車両傾斜角を求めると共に、傾斜角情報取得手段及び傾斜角算出手段により得た傾斜角に対する車両傾斜角の角度差を求めるので、地面のみの正確な傾斜角を得られる。
【0024】
第3発明にあっては、取得された複数回の情報毎に算出されて距離に対して平均化処理を行うので、取得された情報に含まれる誤差の影響を低減でき、良好な距離を得ることができる。
第4発明にあっては、複数の距離情報取得手段を用いて車両の相異する部分のそれぞれで地面までの距離に係る情報を取得して距離を求めると共に、車両の相異する部分で求めた距離差及び各距離情報取得手段の間の水平間隔より車両傾斜角を算出するので、車両傾斜角に係る算出処理に三角関数を用いた演算を導入でき、算出処理の効率化及び算出精度の向上を図れる。
【0025】
第5発明にあっては、2つの距離情報取得手段の中の一方で車両の前部分に対する距離情報を取得すると共に、他方で車両の後ろ部分に対する距離情報を取得するので、車両のピッチ方向における傾斜角を確実に算出できる。
第6発明にあっては、距離情報取得手段として、ステレオ画像を撮像できる手段、超音波の出入を行える手段、又はレーザのような光線の出入を行える手段のいずれかを用いるので、車両周囲の環境に左右されることなく距離に係る情報を取得して、正確な車両傾斜角の算出及び地面の傾斜角の算出に貢献できる。
【0026】
第7発明にあっては、上述した傾斜角算出装置で算出した地面の傾斜角に基づいてマップマッチング先の道路を特定するので、傾斜程度に差がある複数の道路が近接する場所でも正確なマップマッチング処理が可能となり、ナビゲーション処理における位置表示に対する信頼性を向上できる。
【発明を実施するための最良の形態】
【0027】
図1は、本発明の実施形態に係るナビゲーション装置1の主要な構成を示すブロック図である。本実施形態のナビゲーション装置1は車両のピッチ方向における傾斜角を算出する機能を具備した車載用の装置であり、図8(b)に示す車両自体の車両傾斜角θ2を求めると共に、図8(c)に示す車両Sが位置する道路R(地面)のみの傾斜角θ1をも求めて、高精度なマップマッチング処理を可能にしたことを特徴とする。
【0028】
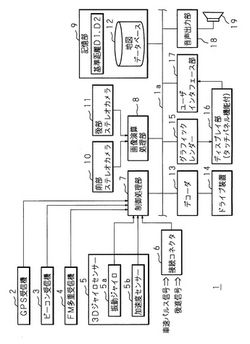
ナビゲーション装置1は、各種受信機2〜4、3Dジャイロセンサー5、接続コネクタ6が接続された制御処理部7を具備すると共に、この制御処理部7を内部バス1aで画像演算処理部8、記憶部9、デコーダ13、グラフィックレンダー15、ユーザインタフェース部17、及び音声出力部18に接続した構成にしている。また、画像演算処理部8には同一物体に対して視差を含む画像を撮像できる前部ステレオカメラ10及び後部ステレオカメラ11が接続されており、さらに、デコーダ13にはドライブ装置14が接続され、グラフィックレンダー15及びユーザインタフェース部17にはタッチパネル機能付のディスプレイ部16が接続され、音声出力部18にはスピーカ19が接続されている。
【0029】
GPS受信機2は、位置情報受信手段としてGPS(Global Positioning System)による人工衛星から発せられる電波を受信し、受信した電波が含む位置情報(緯度経度データ)を制御処理部7へ伝送する処理を行う。また、ビーコン受信機3は、道路交通情報通信システム(VICS)による道路近傍に設けられたインフラ側の情報送信装置から送信される情報を受信するものであり、受信した情報を制御処理部7へ伝送する。なお、インフラ側の情報送信装置の種類としては、高速道路に設置された電波ビーコン、一般道路に設置された光ビーコン等があり、送信される情報は日本道路交通情報センターが提供する渋滞及び交通規制等の交通情報である。
【0030】
FM多重受信機4は、GPSによる人工衛星からの電波受信状態の測位誤差を補正するためのディファレンシャルGPS(D-GPS)のサービスに基づき提供される情報を受信するものであり、受信した情報を制御処理部7へ伝送している。なお、FM多重受信機4は、道路交通情報通信システム(VICS)による都道府県単位の広域情報も受信可能である。
【0031】
3Dジャイロセンサー5は、車両の姿勢及び走行状態等を検出するものであり、角速度を検出する振動ジャイロ5aと、傾斜角及び加速度の検出を行う加速度センサー5bを組み合わせて構成されており、検出した内容をセンサーデータ処理部6aへ伝送する。なお、3Dジャイロセンサー5は傾斜角の算出に対して、車両の水平レベルに対する傾斜角に係る情報を取得する傾斜角情報取得手段として機能するが、取得する情報の傾斜角は、図8(c)に示す傾斜角θ3となり、道路Rのみの傾斜角θ1及び車両のみの車両傾斜角θ2の情報を、それぞれ別個に取得できない。
【0032】
また、接続コネクタ6は、車両側に設けられた信号取出用コネクタ(図示せず)と接続されるものである。車両側の信号取出用コネクタは、車両に設けられた車軸の回転具合を検出するセンサーと繋がれており、このセンサーが出力する車速パルス信号を信号取出用コネクタから取り出せるようにしてあり、さらに車両のトランスミッションのギアセレクタがリバース状態であることを検出するセンサーとも繋がれ、このセンサーが出力する後進信号も取り出せるようにしている。なお、接続コネクタ6は、取り込んだ車速パルス信号及び後進信号を制御処理部7へ伝送している。
【0033】
ナビゲーション装置1の制御処理部7は、各受信機2〜4より伝送されてくる情報の処理、3Dジャイロセンサー5から伝送されてくる検出内容に対する処理、及び接続コネクタ6を通じて伝送されてくる内容に対する処理等を行い現在の位置(車両位置)を所要の時間間隔(例えば、3秒間隔)で算出すると共に、マップマッチング処理及び誘導経路算出処理等を行うものである。さらに、本実施形態の制御処理部7は画像演算処理部8からの情報に基づき図8(b)に示す車両傾斜角θ2及び図8(c)に示す道路Rのみの傾斜角θ1を求める処理を行う。
【0034】
GPS受信機2から伝送されてくる位置情報に基づいて、制御処理部7はいわゆる三角測量の方式を用いて現在の車両位置を算出している。また、制御処理部7は、ビーコン受信機3からの交通情報をディスプレイ部16で適宜表示する処理を行い、FM多重受信機4からの情報に基づきGPSに基づき算出した車両位置の補正処理を行っている。
【0035】
さらに、制御処理部7は、3Dジャイロセンサー5から送られてくる検出内容に基づき、車両の左右の旋回角度を算出すると共に、図8(c)に示すように車両Sの水平レベルHに対する傾斜角θ3を算出し、また、接続コネクタ6より送られてくる車速バルス信号より車両Sの移動距離を算出する処理を行うと共に、後進信号により車両Sが後進中であることを判断している。なお、制御処理部7は、3Dジャイロセンサー5からの検出内容及び車速パルス信号を用いて算出した内容より自立航法に基づく車両位置も求めており、上述したGPSに基づき求めた車両位置及び自立航法に基づく車両位置より妥当な位置を特定し、マップマッチング処理を行う。また、制御処理部7の車両傾斜角θ2及び道路Rのみの傾斜角θ3の算出処理の詳細は後述する。
【0036】
図1に示す記憶部9(記憶手段に相当)は、本実施形態ではハードディスク装置を適用しており、このハードディスク装置に図6(b)に示すような地図40をディスプレイ部16で表示するための地図データ等を含む地図データベース12を記憶させている。なお、地図データベース12には、地図40に含まれる道路を表すリンク及び各道路の交差点を表すノードに係るデータが含まれていると共に、一般道路及び有料道路を区別する識別データ、有料道路への進入路の傾斜角、及び各道路の高度を示すデータ等も含まれている。さらに、記憶部9は、地図データベース12以外にもディスプレイ部16で表示するメニュー画面等のデータ(図示せず)等も記憶すると共に、制御処理部7の指示に基づき各種情報、値を記憶しており、本実施形態では車両Sの特定の部分(各ステレオカメラ10、11の取付箇所)から地面までの基準距離D1、D2を記憶している。
【0037】
また、デコーダ13は、CD及びDVD等の各種記憶媒体に記憶されたデータをドライブ装置14で読み取って、その読み取ったデータをデコードする処理を行う。グラフィックレンダー15はディスプレイ部16で表示するための画像の描画及び展開等の処理を行う。
【0038】
ユーザインタフェース部17は、タッチパネル機能を具備したディスプレイ部16の画面の一部がユーザにより触られた旨をディスプレイ部16から通知されて、その触られたことに対応する操作信号を制御処理部7へ送る処理を行う。よって、ユーザインタフェース部17はユーザからの操作指示を受け付ける手段として機能し、ディスプレイ部16に各種メニューを表示することで、ユーザからの様々な操作を受付可能にしている。なお、ナビゲーション装置1は、図示していないリモートコントロール装置からもユーザの操作を受け付けられるようにしている。また、音声出力部18は、制御処理部7の制御に従いルート案内に係る音声等をスピーカ19から出力する処理を行う。
【0039】
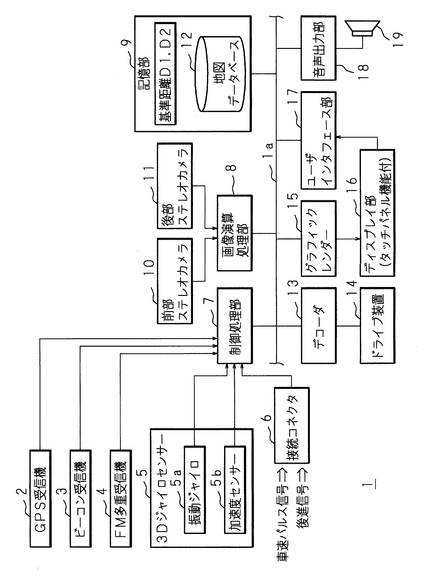
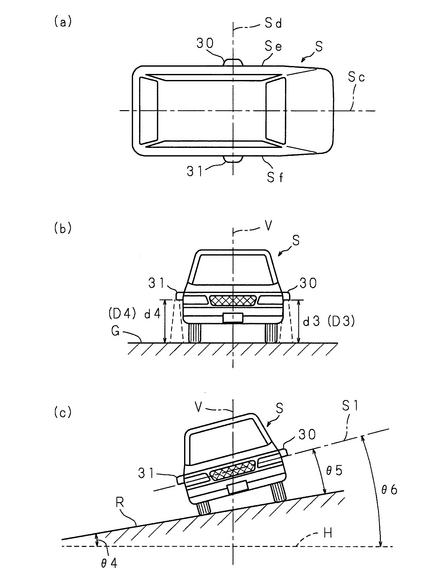
一方、画像演算処理部8は、各ステレオカメラ10、11から送られてくる画像情報に基づき地面までの距離を算出する処理を行う距離算出手段として機能し、各ステレオカメラ10、11は図2(a)に示すように車両Sに取り付けられている。具体的には、前部ステレオカメラ10は、車体の水平的な中心線S1に対して直交し且つ地面Gへ向いた方向で車両Sの前部Saに取り付けられ、また後部ステレオカメラ11も車体の水平的な中心線S1に対して直交し且つ地面Gへ向いた方向で車両Sの後部Sbに取り付けられており、このような取付形態により各ステレオカメラ10、11は地面Gを撮像でき、撮像した内容を画像情報として画像演算処理部8へ伝送している。なお、図2(b)に示すように平面視における各ステレオカメラ10、11は、車両Sの平面視での中心線Scの上に位置している。
【0040】
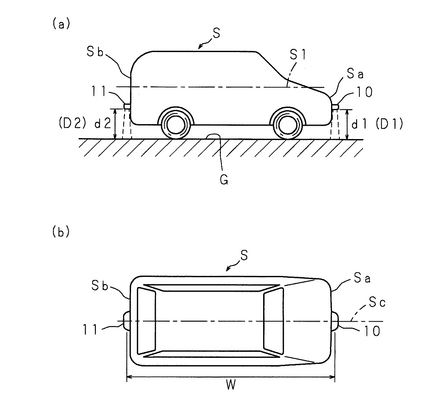
図3は、各ステレオカメラ10、11が撮像を行うことで、各ステレオカメラ10、11から地面までの距離Dを算出する内容を示している。各ステレオカメラ10、11は同一の構造であり、左右2つの光学系を具備し、各光学系毎に撮像素子(CCD、CMOS等)及び撮像レンズを備える。図3では左右の撮像レンズ20、21を表しており(左右の撮像素子の図示は省略)、各撮像レンズ20、21のレンズ中心20a、21aを通るレンズ光軸20b、21bの軸間距離をLとし、各レンズ中心20a、21aを通る軸上の各撮像レンズ20、21の視差をXとした場合、視差を考慮した各レンズ軸(レンズ光軸20b、21bに平行な軸)の軸間に対する距離はL+Xで表すことができる。
【0041】
このようなステレオカメラ10、11で地面Gの被撮像範囲22を撮像した場合、各撮像レンズ20、21の中間点23(レンズ中心20a、21aを通る軸上の点)から、被撮像範囲22の中点22aまでの距離Dは、D=F×L/Xと云う式より求めることが可能となる。このようにして設けられた距離Dの値は、上述した中間点23の高さに対応する車両Sの各ステレオカメラ10、11の取り付け箇所(車両の一部)から地面までの距離に相当する。なお、Fは各撮像レンズ20、21の焦点距離であり、上記の式(D=F×L/X)における焦点距離F及び軸間距離L等の各値は、図1の画像演算処理部8に予め入力されて記憶されているものとする。
【0042】
画像演算処理部8は、各ステレオカメラ10、11で撮像された取得した視差Xを含む画像情報(地面までの距離に係る情報)が送られてくると、画像情報に含まれる被撮像範囲22の中点22aに対して、上述した式を用いて距離Dを算出する処理を行い、算出結果を制御処理部7へ伝送している。
【0043】
また、本実施形態のナビゲーション装置1では、車両が走行する地面の凹凸の影響及び走行車両の振動等による影響を低減するために、距離算出処理を行う場合、先ず各ステレオカメラ10、11は所定時間内に複数回(例えば1秒間に10回)の撮像を行い、各撮像した画像情報毎に距離を求めて、求めた複数の距離に対して平均化処理(統計処理)を行い、誤差の少ない距離を得るようにしている。
【0044】
上述した各ステレオカメラ10、11の撮像時期及び演算処理部8での距離算出処理は、制御処理部7の制御指示に基づいて行われており、制御処理部7は車両傾斜角θ2、道路Rのみの傾斜角θ1の算出が必要な場合に各ステレオカメラ10、11及び演算処理部8へ制御指示を出力する。このような各ステレオカメラ10、11の撮像及び演算処理部8での距離算出処理により、図2(a)に示す車両Sの前部Saにおける前部ステレオカメラ10のレンズ位置から地面Gまでの距離d1、及び後部Sbにおける後部ステレオカメラ11のレンズ位置から地面Gまでの距離d2をナビゲーション装置1は得ている。
【0045】
さらに、本実施形態のナビゲーション装置1は、初期設定として図2(a)に示す車両Sの前部Sa側の距離d1に対応する前部用の基準距離D1、及び後部Sb側の距離d2に対応する後部用の基準距離D2を求めて、求めた値を車両の部分毎に対応付けて図1の記憶部9に記憶している。基準距離D1、D2を求めるには、水平な地面に車両Sを配置すると共に、車両Sに運転手のみが乗車又は乗車をしない状態でエンジンをアイドリング状態にし、この状態で各ステレオカメラ10、11により撮像した画像情報に基づき演算処理部8で得た値を基準距離D1、D2にしている。なお、ナビゲーション装置1は、基準距離D1、D2に対しても平均化処理を行って値を求めるようにして、精度のよい基準距離D1、D2を得ている。
【0046】
さらにまた、本実施形態のナビゲーション装置1は、別の初期設定として図2(b)に示す前部ステレオカメラ10のレンズ中心から後部ステレオカメラ11のレンズ中心までの距離Wの値も予め記憶部9に記憶している。距離Wは実際に測定した値を用いてもよく、又は車両Sのカタログ等に記載されている全長の値に各ステレオカメラ10、11の平面視における車両Sへの取付面からレンズ中心までの距離を合わせた値を用いてもよい。なお、距離Wの値はディスプレイ部16のタッチパネル機能等を介してナビゲーション装置1へ入力する。
【0047】
上述したように演算処理部8で平均化処理を経て算出された距離d1、d2、及び記憶部9に記憶されている基準距離D1、D2を用いて、制御処理部7は車両傾斜角算出手段として図8(b)の車両傾斜角θ2を算出すると共に、地面傾斜角算出手段として図8(c)の道路Rのみの傾斜角θ1を算出する。具体的には、先ず制御処理部7は、車両Sの前部Saに対して演算処理部8から送られた距離d1と記憶されている基準距離D1との前部距離差Δfd(Δfd=d1−D1)を求めると共に、車両Sの後部Sbに対して演算処理部8から送られた距離d2と記憶されている基準距離D2との後部距離差Δrd(Δrd=d2−D2)を求める。
【0048】
それから、制御処理部7は、前部距離差Δfdと後部距離差Δrdとの距離差Δd(Δd=Δfd−Δrd)を求め、最後に各ステレオカメラ10、11のレンズ中心間の水平距離W(図2(b)参照)及び三角関数(tan-1θ)を用いて、図8(b)に示す車両傾斜角θ2(θ2=tan-1(Δd/W))を求める。
【0049】
さらに、制御処理部7は、上述した処理で求めた車両傾斜角θ2を3Dジャイロセンサー5(特に、加速度センサー5b)の補正値として利用することで、図2(c)の道路Rのみの傾斜角θ1を得ている。具体的には、制御処理部7が3Dジャイロセンサー5の検出内容に基づき求めた全体の傾斜角θ3から車両傾斜角θ2を引くことで、道路Rのみの傾斜角θ1を求めている。
【0050】
なお、図1のナビゲーション装置1では、3Dジャイロセンサー5、制御処理部7、画像演算処理部8、記憶部9、及び各ステレオカメラ10、11を用いて各傾斜角θ1、θ2、θ3を求めていることから、上述した各部5、7〜11がナビゲーション装置1に内蔵される傾斜角算出装置として機能している。また、傾斜角算出装置に係る部分(5、7〜11)をまとめて、ナビゲーション装置用の部品ユニットの形態にすることも可能である。
【0051】
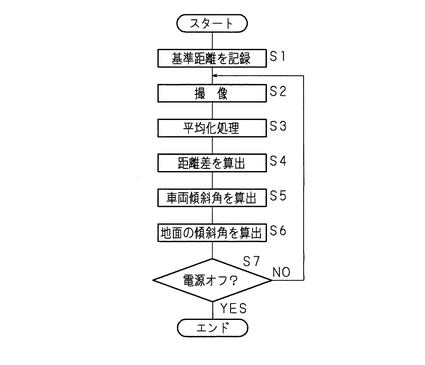
図4は、上述した構成のナビゲーション装置1による傾斜角算出に係る一連の処理手順を示すフローチャートである。以下、このフローチャートに従って本実施形態のナビゲーション装置1の傾斜角算出に係る処理の流れを説明する。
【0052】
先ず、ナビゲーション装置1は、準備段階として初期設定として入力される基準距離D1、D2を記憶部9に記録する(S1)。次に、ナビゲーション装置1は、電源が入れられて起動しているときに傾斜角を算出する必要がある場合、各ステレオカメラ10、11で複数回撮像を行う(S2)。それから、ナビゲーション装置1は、撮像により得られた画像情報毎に地面までの距離を求め、求めた各距離の平均化処理を行う(S3)。
【0053】
平均化処理により得られた車両Sの前部Saの距離d1及び後部Sbの距離d2、並びに基準距離D1、D2より、ナビゲーション装置1は前部距離差Δfd及び後部距離差Δrdを求めて車両前後での距離差Δd算出し(S4)、距離差Δd及び各ステレオカメラ10、11のレンズ中心間の水平距離Wを用いて三角関数により車両傾斜角θ2を算出する(S5)。さらに、ナビゲーション装置1は、3Dジャイロセンサー5からの検出結果により求めていた全体的な傾斜角θ3を車両傾斜角θ2で補正して、道路R(車両Sが位置する地面)の傾斜角θ1を算出する(S6)。
【0054】
傾斜角θ1の算出後、ナビゲーション装置1は、電源がオフされたか否かを判断し(S7)、電源がオフされていない場合(S7:NO)、各ステレオカメラ10、11による撮像の段階(S2)へ戻り、以降、電源がオフされるまでS2の段階からS7の段階までの処理を繰り返すことになる。また、電源がオフされた場合(S7:YES)、処理を終了する。このように本発明に係るナビゲーション装置1は、車両傾斜角θ2及び道路Rのみの傾斜角θ1を正確に求めることができる。
【0055】
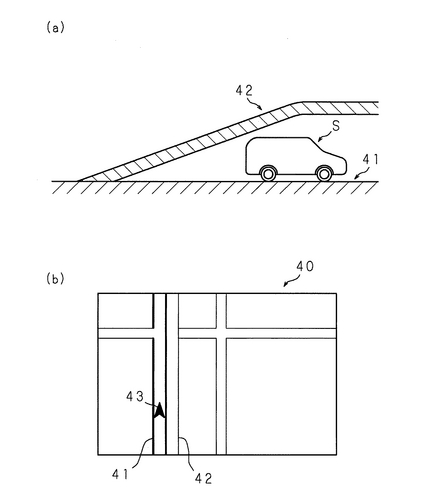
また、本実施形態のナビゲーション装置1は、上述した処理で得た道路Rのみの傾斜角θ1を利用して、マップマッチング先の道路を特定する処理も行っている。具体的には、図6(a)及び図7(a)に示すように地表に設けられた一般道路41と高速道路へ進入するための傾斜した進入路42が近接して併行する場所でナビゲーション装置1の制御処理部7がマップマッチング処理を行う場合、道路Rのみの傾斜角θ1と地図データベース12に含まれる各道路41、42の傾斜角に係るデータを比較してマップマッチング先を特定している。
【0056】
図6(a)に示すように車両Sが殆ど傾斜していない一般道路41を走行している場合、ナビゲーション装置1で得られる道路の傾斜角θ1も0度に近くなることから、ナビゲーション装置1の制御処理部7は、地図データベース12に含まれる各道路41、42の傾斜情報と算出した傾斜角θ1の値とを比較し、差が少ない一般道路41をマップマッチング先として特定する。その結果、図6(b)に示すように車両Sの位置を示すアイコン43が一般道路41に合致するように制御処理部7はマップマッチング処理を行う。
【0057】
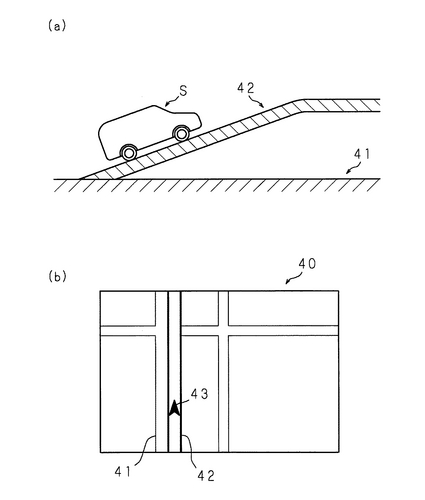
一方、図7(a)に示すように車両Sが傾斜している進入路42を走行している場合、ナビゲーション装置1で得られる道路の傾斜角θ1は進入路42の傾斜角と同等になる。そのため、ナビゲーション装置1の制御処理部7は、地図データベース12に含まれる各道路41、42の傾斜情報と算出した傾斜角θ1の値とを比較し、進入路42をマップマッチング先として特定し、図7(b)に示すように車両Sのアイコン43を進入路42に合致するように制御処理部7はマップマッチング処理を行う。このようなマップマッチング処理を制御処理部7が行うことで、本発明のナビゲーション装置1は従来に比べて実際の走行箇所に合致した表示を行える。
【0058】
なお、本発明に係るナビゲーション装置1は、上述した形態に限定されるものではなく、種々の変形例の適用が可能である。例えば、車両Sに取り付ける各ステレオカメラ10、11のように左右の撮像素子及び撮像レンズを備えたカメラ以外に、プリズム等で構成されるステレオアダプタを用いて1個の撮像素子で同一物体に対して視差を含んだ画像を撮像できるカメラを適用してもよく、この場合は、カメラ自体の小型化を図れるので、車両Sへの取付状態も良好にできる。
【0059】
また、車両Sの一部から地面までの距離に係る情報を取得する手段としては、上述したステレオ画像を撮像するカメラ以外に、地面へ向けて超音波を出射すると共に地面で反射した超音波を取り入れる超音波出入装置(超音波送受信機)を用いることも可能である。この場合、図2(a)(b)に示す各ステレオカメラ10、11と同様に車両Sの前後部Sa、Sbに超音波送受信機を取り付けると共に、図1の画像演算処理部8の替わりに各超音波送受信機と接続された距離演算部を設けることになる。この距離演算部は、各超音波送受信機が地面Gへ向けて超音波を出射してから地面Gで反射した超音波を取り入れるまでの時間を計測し、各距離d1、d2を算出することになる。なお、距離演算部は算出した各距離d1、d2を制御処理部7へ伝送する処理を行う。
【0060】
さらに、車両Sの一部から地面までの距離に係る情報を取得する手段(距離情報取得手段)としては、地面へ向けてレーザ光(光線)を出射すると共に地面で反射したレーザ光(反射光線)を取り入れて受光するレーザ光出入装置を用いてもよい。この場合も図2(a)(b)に示す各ステレオカメラ10、11と同様に車両Sの前後部Sa、Sbにレーザ光出入装置を取り付けると共に、図1の画像演算処理部8の替わりに各レーザ光出入装置と接続されたレーザ光用の距離演算部を設けることになる。この距離演算部も、各レーザ光出入装置が地面Gへ向けてレーザ光を出射してから地面Gで反射したレーザ光を取り入れるまでの時間を計測して各距離d1、d2を算出することになる。このように超音波送受信機又はレーザ光出入装置を適用した場合は、天候(晴天時、雨天時等)及び周囲の明暗等の影響に左右されることなく安定して各距離d1、d2を求められる。
【0061】
また、本発明に係るナビゲーション装置1の傾斜角算出機能は、車両Sのピッチ方向に対する車両傾斜角θ1以外にも、距離情報取得手段(ステレオカメラ等のカメラ、超音波送受信機、レーザ光出入装置)の車両Sへの取付箇所を変更することで、様々な方向の傾斜角を算出することができる。
【0062】
例えば、図5(a)に示すように、車両Sの左側面部Seに左側ステレオカメラ30を取り付けると共に、右側面図Sfに右側ステレオカメラ31を取り付け、両ステレオカメラ30、31が車両Sの幅方向の中心線Sdの上に位置させると共に、地面Gを撮像できるようにする。また、図1に示す記憶部9に左右両側のステレオカメラ30、31のレンズ中心間の水平距離を記憶させると共に、各ステレオカメラ30、31の算出対象となる各距離d3、d4に対応する基準距離D3、D4を記憶させ(図5(b)参照)、上述した処理と同様にすることで、垂直線Vに対して傾いた車両Sのロール方向の車両傾斜角θ5を算出できると共に、及び3Dジャイロセンサー5の検出結果より求めた全体的な傾斜角θ6と車両傾斜角θ5との差より道路Rのみの傾斜角θ4も算出できる(図5(c)参照)。
【0063】
なお、このように求めたロール方向の車両傾斜角θ5は、電子制御サスペンションに対するロール方向の姿勢制御、車両の操舵制御、トルク配分制御等にも利用できる。また、上述したピッチ方向の車両傾斜角θ2(図8(b)参照)も勿論、車両の各種制御(加減速制御、姿勢制御等)に利用できる。車両Sの左右以外にも、車両の対角方向に距離情報取得手段(ステレオカメラ等のカメラ、超音波送受信機、レーザ光出入装置)を取り付けることで、車両Sの対角方向に対する車両傾斜角をも算出可能となる。
【0064】
また、距離情報取得手段(ステレオカメラ等のカメラ、超音波送受信機、レーザ光出入装置)を車両Sに取り付ける個数は複数(2個以上)に限定されるものではなく、1個の距離情報取得手段を取り付けて簡易的に車両傾斜角を算出することも可能である。
【0065】
例えば、車両Sの前部Saのみにステレオカメラ10を取り付けると共に、車両を様々な傾斜角度で傾斜させた場合ごとに、ステレオカメラ10で測定される距離d1に対応する基準距離を車両傾斜角θ2と関連付けて予め測定しておき、この測定に基づく値(各基準距離とそれに対応する車両傾斜角θ2)を記憶したテーブル又は各測定値と車両傾斜角θ2の関係を導く関係式を記憶部9に記憶させておく。それから、ナビゲーション装置1の制御処理部7は、画像演算処理部8から送られてくる距離d1と記憶部9に記憶されたテーブル又は関係式より簡易的に車両傾斜角θ2を求めることができる。よって、この変形例に係る構成では、算出結果に対する精度の要求がシビアでない場合、簡易な構成で各種傾斜角を容易に得ることができる。
【図面の簡単な説明】
【0066】
【図1】本発明の実施形態に係るナビゲーション装置のブロック図である。
【図2】(a)はステレオカメラを前後部に取り付けた車両の側面図であり、(b)は車両の平面図である。
【図3】ステレオカメラによる距離算出を説明する概略図である。
【図4】傾斜角算出に係る一連の処理手順を示すフローチャートである。
【図5】(a)はステレオカメラを左右に取り付けた車両の平面図であり、(b)は車両の正面図、(b)は傾斜した道路に位置するロールした車両を示す正面図である。
【図6】(a)は傾斜した有料道路の進入路に併行する平坦な一般道路を走行する車両を示す概略図であり、(b)は(a)に示す車両位置をマップマッチングした地図の概略図である。
【図7】(a)は平坦な一般道路に併行する傾斜した有料道路の進入路を走行する車両を示す概略図であり、(b)は(a)に示す車両位置をマップマッチングした地図の概略図である。
【図8】(a)は、傾斜した道路に位置する車両を示す概略図であり、(b)はピッチ方向に傾斜した車両を示す概略図であり、(c)は傾斜した道路に位置するピッチ方向に傾斜した車両を示す概略図である。
【符号の説明】
【0067】
1 ナビゲーション装置
2 GPS受信機
3 ビーコン受信機
4 FM多重受信機
5 3Dジャイロセンサー
5a 振動ジャイロ
5b 加速度センサー
6 接続コネクタ
7 制御処理部
8 画像演算処理部
9 記憶部
10 前部ステレオカメラ
11 後部ステレオカメラ
12 地図データベース
S 車両
θ1 道路のみの傾斜角
θ2 車両傾斜角
【技術分野】
【0001】
本発明は、乗車人数、積載荷物の有無、車両の加減速等に基づく車両自体の傾斜角を正確に算出すると共に、地面のみの傾斜角を算出可能にした傾斜角算出装置、及び該傾斜角算出装置で得られた地面の傾斜角を用いて良好なマップマッチング処理を行うナビゲーション装置に関する。
【背景技術】
【0002】
従来、車両等に搭載されて目的地までのルート案内を行うナビゲーション装置が普及している。ナビゲーション装置は一般に、GPS(Global Positioning System)を利用して位置情報を受信すると共に、ナビゲーション装置が具備する各種センサー及び車両側から取得する車速パルス等に基づき現在の車両位置を算出し、目的地までの道順を表示するものである。算出した現在の車両位置を地図上に表示する際、算出誤差等が原因となって地図上の道路位置に、求めた車両位置が一致しないことがあるが、このような場合、ナビゲーション装置は車両位置が妥当な道路上に載るようにマップマッチング処理を行う。
【0003】
近時、マップマッチング処理の精度を高めるために、二次元的な平面における車両の位置情報(緯度、経度)に加えて、加速度センサー等の各種検出結果より水平レベルに対する車両の傾斜角を求め、その求めた傾斜角を利用してマップマッチング処理を行うナビゲーション装置が存在する。例えば、高架道路への進入道路及びその進入道路に一般道路が併行するような場所でマップマッチング処理を行う場合、求めた傾斜角より進入道路又は一般道路のいずれをマップマッチング先にするかを判断することが可能になる(特許文献1参照)。
【0004】
また、下記の特許文献2では、車両の状態を検出する各種センサーの検出結果の累積誤差の影響を可及的に抑制し、現在の車両位置を正確に表示できるようにしたナビゲーション装置が開示されている。
【特許文献1】特開2002−277266号公報
【特許文献2】特開平8−285621号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
従来の車両の傾斜角の求め方では、車両が位置する道路のみの傾斜角を正確に算出できないと云う問題がある。例えば、図8(a)に示すように、傾斜した道路Rに位置する車両Sが前後で重量的にバランスの取れた状態であり、且つ加減速を行っていない場合、車両Sに搭載されたナビゲーション装置で求める傾斜角θ1は、水平レベルHに対する道路Rの傾斜角に一致する。
【0006】
しかし、図8(b)に示すように、乗車人数又は積載荷物等により前後の重量的なバランスが取れていない場合、車両Sが加減速している場合等には、車両Sが水平な道路に位置していても車体(ボディ)の水平的な中心線S1は水平レベルHと平行にならず、車両自体の傾斜角として車両傾斜角θ2が生じる(図8(b)は前上がりの状態を示す)。よって、このように車両傾斜角θ2が生じると、ナビゲーション装置は車両傾斜角θ2を検出し、実際には水平な道路を走行中であっても傾斜した道路を走行していると判断し誤ったマップマッチング処理を行うおそれが生じる。
【0007】
さらに、図8(c)に示すように、図8(b)の車両状態で図8(a)のような傾斜した道路Rを走行すると、ナビゲーション装置は傾斜角θ3(θ1+θ2)を検出し、正確に道路Rのみの傾斜角を検出できないため、この場合も誤ったマップマッチング処理を行うおそれがある。
【0008】
一方、上述した特許文献1に係るナビゲーション装置で検出できる傾斜角は図8(c)に示す車両自体の傾斜角と道路の傾斜角が合わさった傾斜角θ3であるため、特許文献1に係るナビゲーション装置は道路のみの傾斜角をセンサー等の検出結果に基づいて算出できない。さらに、特許文献2に係るナビゲーション装置では、車両の停車時のみにセンサー等の補正値を使用するに留まるため、車両の走行中では道路のみの傾斜角を求めることはできない。
【0009】
また、道路のみの傾斜角だけでなく車両傾斜角を正確に求めることは、車両に対する各種制御を行う上で重要であり、例えば、図8(b)に示す車両Sのピッチ方向(前後方向)の車両傾斜角θ2を求めると、その車両傾斜角θ2は車両の加減速制御、電子制御サスペンションに対するピッチ方向の姿勢制御等に利用できる。さらに、車両Sのロール方向(左右方向)の傾斜角を求めると、そのロール方向の傾斜角は電子制御サスペンションに対するロール方向の姿勢制御、車両の操舵制御、トルク配分制御等にも利用できる。そのため、車両の各方向における傾斜角を正確に求めることは、車両の各種制御に対して意義が大きい。
【0010】
本発明は、斯かる事情に鑑みてなされたものであり、地面までの距離を求めることにより、水平レベルに対する車両の各方向の傾斜角を正確に算出可能にした傾斜角算出装置を提供することを目的とする。
また、本発明は、正確に求めた車両自体の傾斜角で算出された全体的な傾斜角の値を補正して道路のみの正確な傾斜角を求められるようにした傾斜角算出装置を提供することを目的とする。
さらに、本発明は、求めた道路のみの傾斜角を利用して適切なマップマッチング処理を行えるようにしたナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記課題を解決するために第1発明に係る傾斜角算出装置は、車両の水平レベルに対する傾斜角を算出する車載用の傾斜角算出装置において、車両の一部から地面までの基準距離を記憶する記憶手段と、前記車両の一部から地面までの距離に係る情報を取得する距離情報取得手段と、該距離情報取得手段が取得した情報に基づいて距離を算出する距離算出手段と、該距離算出手段が算出した距離及び前記基準距離の距離差より車両自体の車両傾斜角を算出する車両傾斜角算出手段とを備えることを特徴とする。
【0012】
第1発明にあっては、車両の一部から地面までの距離(車体の水平中心線に対して鉛直方向の距離)を基準距離として予め記憶すると共に、前記車両の一部から地面までの距離に係る情報を取得して距離を算出し、算出した距離と基準距離との差を求めて、その差より車両自体の車両傾斜角を算出するので、加速度センサー及びジャイロセンサー等のセンサーの検出結果を利用しないで正確に車両のみの傾斜角を得ることが可能になる。このように得られた車両傾斜角は、ナビゲーション装置におけるマップマッチング処理、及び車両の各種制御に用いることができる。なお、できるだけ高精度の車両傾斜角を得る観点から、基準距離となる値は水平的な場所に位置する水平的な姿勢の車両に対して得られた距離を用いることが好ましい。
【0013】
第2発明に係る傾斜角算出装置は、車両の水平レベルに対する傾斜角に係る情報を取得する傾斜角情報取得手段と、該傾斜角情報取得手段が取得した情報に基づいて傾斜角を算出する傾斜角算出手段とを備える車載用の傾斜角算出装置において、車両の一部から地面までの距離を基準距離として記憶する記憶手段と、前記車両の一部から地面までの距離に係る情報を取得する距離情報取得手段と、該距離情報取得手段が取得した情報に基づいて距離を算出する距離算出手段と、該距離算出手段が算出した距離及び前記基準距離の距離差より車両自体の車両傾斜角を算出する車両傾斜角算出手段と、該車両傾斜角算出手段が算出した車両傾斜角及び前記傾斜角算出手段が算出した傾斜角の角度差より地面の傾斜角を算出する地面傾斜角算出手段とを備えることを特徴とする。
【0014】
第2発明にあっては、第1発明と同様にして車両傾斜角を求めると共に、傾斜角情報取得手段及び傾斜角算出手段により得た傾斜角に対する車両傾斜角の角度差を求めることで、全体的な傾斜角を車両傾斜角で補正して地面のみの傾斜角を得られるようになる。その結果、車両が如何なる姿勢であっても正確に地面のみの傾斜角を確実に得ることが可能になる。
【0015】
第3発明に係る傾斜角算出装置は、前記距離情報取得手段は、情報を複数回取得するようにしてあり、前記距離算出手段は、前記距離情報取得手段が取得した複数回の情報毎に算出した距離の平均化処理を行うことを特徴とする。
第3発明にあっては、取得された複数回の情報毎に算出した距離に対して平均化処理を行うので、取得された情報に含まれる誤差の影響を低減できるようになり、平均化処理を経て得られた距離の精度を向上できる。
【0016】
第4発明に係る傾斜角算出装置は、前記距離情報取得手段は、複数であり、複数の距離情報取得手段は、車両の相異する部分で地面までの距離に係る情報を取得するようにしてあり、前記距離算出手段は、前記複数の距離情報取得手段が取得したそれぞれの情報に基づいて車両の相異する部分毎に距離を算出するようにしてあり、前記記憶手段は、車両の相異する部分毎に複数の基準距離を記憶しており、前記車両傾斜角算出手段は、車両の相異する部分毎での距離及び基準距離の距離差、並びに前記複数の距離情報取得手段の水平間隔より車両傾斜角を算出するようにしてあることを特徴とする。
【0017】
第4発明にあっては、複数の距離情報取得手段を用いて車両の相異する部分のそれぞれで地面までの距離に係る情報を取得して距離を求めると共に、車両の相異する部分で求めた距離差及び各距離情報取得手段の間の水平間隔と云う複数の要素を用いて車両傾斜角を算出するので、スムーズに車両傾斜角を求められる上に算出精度を一段と向上できる。即ち、車両の相異する部分で求められる距離差と各距離情報取得手段の水平間隔とが判明することで、車両姿勢の現状を詳細に反映できると共に算出処理に三角関数の演算を用いることが可能になり、算出処理の効率化を図れる。
【0018】
第5発明に係る傾斜角算出装置は、前記距離情報取得手段は、2つであり、一方の距離情報取得手段は、車両の前部分で地面までの距離に係る情報を取得するようにしてあり、他方の距離情報取得手段は、車両の後部分で地面までの距離に係る情報を取得するようにしてあることを特徴とする。
第5発明にあっては、2つの距離情報取得手段の中の一方で車両の前部分に対する距離情報を取得すると共に、他方で車両の後ろ部分に対する距離情報を取得するので、車両のピッチ方向における傾斜角を確実に算出することが可能になる。
【0019】
第6発明に係る傾斜角算出装置は、前記距離情報取得手段は、同一物体に対して視差を含む画像を取得することが可能な撮像手段、超音波を出射して反射波を取り入れる超音波出入手段、又は光線を出射して反射光線を取り入れる光線出入手段のいずれかであることを特徴とする。
【0020】
第6発明にあっては、距離情報取得手段として、視差を含む画像(ステレオ画像)を撮像できる手段、超音波の出入を行える手段、又はレーザ光のような光線の出入を行える手段のいずれかを用いるので確実に距離に係る情報を取得して、正確な車両傾斜角の算出及び地面の傾斜角の算出に貢献できる。ステレオ画像を撮像できる手段を用いる場合は、地面の質(アスファルト、コンクリート、土等)及び地面の凹凸等の地面状況によらず安定した情報取得が可能である。また、超音波の出入を行える手段及び光線の出入を行える手段は、天候(晴天時、雨天時等)及び周囲の明暗等の影響に左右されることなく情報取得を行える。
【0021】
第7発明に係るナビゲーション装置は、位置情報を受信する位置情報受信手段と、該位置情報受信手段が受信した位置情報に基づいて算出した位置を地図上の道路に合致させるマップマッチング処理を行うマップマッチング手段とを備えるナビゲーション装置において、上述したいずれかの構成の傾斜角算出装置と、傾斜程度に差がある複数の道路が近接する場所で前記マップマッチング手段がマップマッチング処理を行う場合、前記傾斜角算出装置が算出した地面の傾斜角に基づいてマップマッチング先の道路を特定する手段とを備えることを特徴とする。
【0022】
第7発明にあっては、上述した傾斜角算出装置で算出した地面の傾斜角に基づいてマップマッチング先の道路を特定するので、傾斜程度に差がある複数の道路が近接する場所でも正確にマップマッチング処理を行えるようになり、ナビゲーション処理における位置表示に対する信頼性を向上できる。
【発明の効果】
【0023】
第1発明にあっては、車両の一部から地面までの基準距離を予め記憶すると共に、前記車両の一部から地面までの距離に係る情報を取得して距離を算出し、算出した距離と基準距離との差を求めて車両傾斜角を算出するので、車両が位置する道路の傾斜角の影響を受けることなく、車両のみの正確な傾斜角(車両傾斜角)を得られる。
第2発明にあっては、第1発明と同様にして車両傾斜角を求めると共に、傾斜角情報取得手段及び傾斜角算出手段により得た傾斜角に対する車両傾斜角の角度差を求めるので、地面のみの正確な傾斜角を得られる。
【0024】
第3発明にあっては、取得された複数回の情報毎に算出されて距離に対して平均化処理を行うので、取得された情報に含まれる誤差の影響を低減でき、良好な距離を得ることができる。
第4発明にあっては、複数の距離情報取得手段を用いて車両の相異する部分のそれぞれで地面までの距離に係る情報を取得して距離を求めると共に、車両の相異する部分で求めた距離差及び各距離情報取得手段の間の水平間隔より車両傾斜角を算出するので、車両傾斜角に係る算出処理に三角関数を用いた演算を導入でき、算出処理の効率化及び算出精度の向上を図れる。
【0025】
第5発明にあっては、2つの距離情報取得手段の中の一方で車両の前部分に対する距離情報を取得すると共に、他方で車両の後ろ部分に対する距離情報を取得するので、車両のピッチ方向における傾斜角を確実に算出できる。
第6発明にあっては、距離情報取得手段として、ステレオ画像を撮像できる手段、超音波の出入を行える手段、又はレーザのような光線の出入を行える手段のいずれかを用いるので、車両周囲の環境に左右されることなく距離に係る情報を取得して、正確な車両傾斜角の算出及び地面の傾斜角の算出に貢献できる。
【0026】
第7発明にあっては、上述した傾斜角算出装置で算出した地面の傾斜角に基づいてマップマッチング先の道路を特定するので、傾斜程度に差がある複数の道路が近接する場所でも正確なマップマッチング処理が可能となり、ナビゲーション処理における位置表示に対する信頼性を向上できる。
【発明を実施するための最良の形態】
【0027】
図1は、本発明の実施形態に係るナビゲーション装置1の主要な構成を示すブロック図である。本実施形態のナビゲーション装置1は車両のピッチ方向における傾斜角を算出する機能を具備した車載用の装置であり、図8(b)に示す車両自体の車両傾斜角θ2を求めると共に、図8(c)に示す車両Sが位置する道路R(地面)のみの傾斜角θ1をも求めて、高精度なマップマッチング処理を可能にしたことを特徴とする。
【0028】
ナビゲーション装置1は、各種受信機2〜4、3Dジャイロセンサー5、接続コネクタ6が接続された制御処理部7を具備すると共に、この制御処理部7を内部バス1aで画像演算処理部8、記憶部9、デコーダ13、グラフィックレンダー15、ユーザインタフェース部17、及び音声出力部18に接続した構成にしている。また、画像演算処理部8には同一物体に対して視差を含む画像を撮像できる前部ステレオカメラ10及び後部ステレオカメラ11が接続されており、さらに、デコーダ13にはドライブ装置14が接続され、グラフィックレンダー15及びユーザインタフェース部17にはタッチパネル機能付のディスプレイ部16が接続され、音声出力部18にはスピーカ19が接続されている。
【0029】
GPS受信機2は、位置情報受信手段としてGPS(Global Positioning System)による人工衛星から発せられる電波を受信し、受信した電波が含む位置情報(緯度経度データ)を制御処理部7へ伝送する処理を行う。また、ビーコン受信機3は、道路交通情報通信システム(VICS)による道路近傍に設けられたインフラ側の情報送信装置から送信される情報を受信するものであり、受信した情報を制御処理部7へ伝送する。なお、インフラ側の情報送信装置の種類としては、高速道路に設置された電波ビーコン、一般道路に設置された光ビーコン等があり、送信される情報は日本道路交通情報センターが提供する渋滞及び交通規制等の交通情報である。
【0030】
FM多重受信機4は、GPSによる人工衛星からの電波受信状態の測位誤差を補正するためのディファレンシャルGPS(D-GPS)のサービスに基づき提供される情報を受信するものであり、受信した情報を制御処理部7へ伝送している。なお、FM多重受信機4は、道路交通情報通信システム(VICS)による都道府県単位の広域情報も受信可能である。
【0031】
3Dジャイロセンサー5は、車両の姿勢及び走行状態等を検出するものであり、角速度を検出する振動ジャイロ5aと、傾斜角及び加速度の検出を行う加速度センサー5bを組み合わせて構成されており、検出した内容をセンサーデータ処理部6aへ伝送する。なお、3Dジャイロセンサー5は傾斜角の算出に対して、車両の水平レベルに対する傾斜角に係る情報を取得する傾斜角情報取得手段として機能するが、取得する情報の傾斜角は、図8(c)に示す傾斜角θ3となり、道路Rのみの傾斜角θ1及び車両のみの車両傾斜角θ2の情報を、それぞれ別個に取得できない。
【0032】
また、接続コネクタ6は、車両側に設けられた信号取出用コネクタ(図示せず)と接続されるものである。車両側の信号取出用コネクタは、車両に設けられた車軸の回転具合を検出するセンサーと繋がれており、このセンサーが出力する車速パルス信号を信号取出用コネクタから取り出せるようにしてあり、さらに車両のトランスミッションのギアセレクタがリバース状態であることを検出するセンサーとも繋がれ、このセンサーが出力する後進信号も取り出せるようにしている。なお、接続コネクタ6は、取り込んだ車速パルス信号及び後進信号を制御処理部7へ伝送している。
【0033】
ナビゲーション装置1の制御処理部7は、各受信機2〜4より伝送されてくる情報の処理、3Dジャイロセンサー5から伝送されてくる検出内容に対する処理、及び接続コネクタ6を通じて伝送されてくる内容に対する処理等を行い現在の位置(車両位置)を所要の時間間隔(例えば、3秒間隔)で算出すると共に、マップマッチング処理及び誘導経路算出処理等を行うものである。さらに、本実施形態の制御処理部7は画像演算処理部8からの情報に基づき図8(b)に示す車両傾斜角θ2及び図8(c)に示す道路Rのみの傾斜角θ1を求める処理を行う。
【0034】
GPS受信機2から伝送されてくる位置情報に基づいて、制御処理部7はいわゆる三角測量の方式を用いて現在の車両位置を算出している。また、制御処理部7は、ビーコン受信機3からの交通情報をディスプレイ部16で適宜表示する処理を行い、FM多重受信機4からの情報に基づきGPSに基づき算出した車両位置の補正処理を行っている。
【0035】
さらに、制御処理部7は、3Dジャイロセンサー5から送られてくる検出内容に基づき、車両の左右の旋回角度を算出すると共に、図8(c)に示すように車両Sの水平レベルHに対する傾斜角θ3を算出し、また、接続コネクタ6より送られてくる車速バルス信号より車両Sの移動距離を算出する処理を行うと共に、後進信号により車両Sが後進中であることを判断している。なお、制御処理部7は、3Dジャイロセンサー5からの検出内容及び車速パルス信号を用いて算出した内容より自立航法に基づく車両位置も求めており、上述したGPSに基づき求めた車両位置及び自立航法に基づく車両位置より妥当な位置を特定し、マップマッチング処理を行う。また、制御処理部7の車両傾斜角θ2及び道路Rのみの傾斜角θ3の算出処理の詳細は後述する。
【0036】
図1に示す記憶部9(記憶手段に相当)は、本実施形態ではハードディスク装置を適用しており、このハードディスク装置に図6(b)に示すような地図40をディスプレイ部16で表示するための地図データ等を含む地図データベース12を記憶させている。なお、地図データベース12には、地図40に含まれる道路を表すリンク及び各道路の交差点を表すノードに係るデータが含まれていると共に、一般道路及び有料道路を区別する識別データ、有料道路への進入路の傾斜角、及び各道路の高度を示すデータ等も含まれている。さらに、記憶部9は、地図データベース12以外にもディスプレイ部16で表示するメニュー画面等のデータ(図示せず)等も記憶すると共に、制御処理部7の指示に基づき各種情報、値を記憶しており、本実施形態では車両Sの特定の部分(各ステレオカメラ10、11の取付箇所)から地面までの基準距離D1、D2を記憶している。
【0037】
また、デコーダ13は、CD及びDVD等の各種記憶媒体に記憶されたデータをドライブ装置14で読み取って、その読み取ったデータをデコードする処理を行う。グラフィックレンダー15はディスプレイ部16で表示するための画像の描画及び展開等の処理を行う。
【0038】
ユーザインタフェース部17は、タッチパネル機能を具備したディスプレイ部16の画面の一部がユーザにより触られた旨をディスプレイ部16から通知されて、その触られたことに対応する操作信号を制御処理部7へ送る処理を行う。よって、ユーザインタフェース部17はユーザからの操作指示を受け付ける手段として機能し、ディスプレイ部16に各種メニューを表示することで、ユーザからの様々な操作を受付可能にしている。なお、ナビゲーション装置1は、図示していないリモートコントロール装置からもユーザの操作を受け付けられるようにしている。また、音声出力部18は、制御処理部7の制御に従いルート案内に係る音声等をスピーカ19から出力する処理を行う。
【0039】
一方、画像演算処理部8は、各ステレオカメラ10、11から送られてくる画像情報に基づき地面までの距離を算出する処理を行う距離算出手段として機能し、各ステレオカメラ10、11は図2(a)に示すように車両Sに取り付けられている。具体的には、前部ステレオカメラ10は、車体の水平的な中心線S1に対して直交し且つ地面Gへ向いた方向で車両Sの前部Saに取り付けられ、また後部ステレオカメラ11も車体の水平的な中心線S1に対して直交し且つ地面Gへ向いた方向で車両Sの後部Sbに取り付けられており、このような取付形態により各ステレオカメラ10、11は地面Gを撮像でき、撮像した内容を画像情報として画像演算処理部8へ伝送している。なお、図2(b)に示すように平面視における各ステレオカメラ10、11は、車両Sの平面視での中心線Scの上に位置している。
【0040】
図3は、各ステレオカメラ10、11が撮像を行うことで、各ステレオカメラ10、11から地面までの距離Dを算出する内容を示している。各ステレオカメラ10、11は同一の構造であり、左右2つの光学系を具備し、各光学系毎に撮像素子(CCD、CMOS等)及び撮像レンズを備える。図3では左右の撮像レンズ20、21を表しており(左右の撮像素子の図示は省略)、各撮像レンズ20、21のレンズ中心20a、21aを通るレンズ光軸20b、21bの軸間距離をLとし、各レンズ中心20a、21aを通る軸上の各撮像レンズ20、21の視差をXとした場合、視差を考慮した各レンズ軸(レンズ光軸20b、21bに平行な軸)の軸間に対する距離はL+Xで表すことができる。
【0041】
このようなステレオカメラ10、11で地面Gの被撮像範囲22を撮像した場合、各撮像レンズ20、21の中間点23(レンズ中心20a、21aを通る軸上の点)から、被撮像範囲22の中点22aまでの距離Dは、D=F×L/Xと云う式より求めることが可能となる。このようにして設けられた距離Dの値は、上述した中間点23の高さに対応する車両Sの各ステレオカメラ10、11の取り付け箇所(車両の一部)から地面までの距離に相当する。なお、Fは各撮像レンズ20、21の焦点距離であり、上記の式(D=F×L/X)における焦点距離F及び軸間距離L等の各値は、図1の画像演算処理部8に予め入力されて記憶されているものとする。
【0042】
画像演算処理部8は、各ステレオカメラ10、11で撮像された取得した視差Xを含む画像情報(地面までの距離に係る情報)が送られてくると、画像情報に含まれる被撮像範囲22の中点22aに対して、上述した式を用いて距離Dを算出する処理を行い、算出結果を制御処理部7へ伝送している。
【0043】
また、本実施形態のナビゲーション装置1では、車両が走行する地面の凹凸の影響及び走行車両の振動等による影響を低減するために、距離算出処理を行う場合、先ず各ステレオカメラ10、11は所定時間内に複数回(例えば1秒間に10回)の撮像を行い、各撮像した画像情報毎に距離を求めて、求めた複数の距離に対して平均化処理(統計処理)を行い、誤差の少ない距離を得るようにしている。
【0044】
上述した各ステレオカメラ10、11の撮像時期及び演算処理部8での距離算出処理は、制御処理部7の制御指示に基づいて行われており、制御処理部7は車両傾斜角θ2、道路Rのみの傾斜角θ1の算出が必要な場合に各ステレオカメラ10、11及び演算処理部8へ制御指示を出力する。このような各ステレオカメラ10、11の撮像及び演算処理部8での距離算出処理により、図2(a)に示す車両Sの前部Saにおける前部ステレオカメラ10のレンズ位置から地面Gまでの距離d1、及び後部Sbにおける後部ステレオカメラ11のレンズ位置から地面Gまでの距離d2をナビゲーション装置1は得ている。
【0045】
さらに、本実施形態のナビゲーション装置1は、初期設定として図2(a)に示す車両Sの前部Sa側の距離d1に対応する前部用の基準距離D1、及び後部Sb側の距離d2に対応する後部用の基準距離D2を求めて、求めた値を車両の部分毎に対応付けて図1の記憶部9に記憶している。基準距離D1、D2を求めるには、水平な地面に車両Sを配置すると共に、車両Sに運転手のみが乗車又は乗車をしない状態でエンジンをアイドリング状態にし、この状態で各ステレオカメラ10、11により撮像した画像情報に基づき演算処理部8で得た値を基準距離D1、D2にしている。なお、ナビゲーション装置1は、基準距離D1、D2に対しても平均化処理を行って値を求めるようにして、精度のよい基準距離D1、D2を得ている。
【0046】
さらにまた、本実施形態のナビゲーション装置1は、別の初期設定として図2(b)に示す前部ステレオカメラ10のレンズ中心から後部ステレオカメラ11のレンズ中心までの距離Wの値も予め記憶部9に記憶している。距離Wは実際に測定した値を用いてもよく、又は車両Sのカタログ等に記載されている全長の値に各ステレオカメラ10、11の平面視における車両Sへの取付面からレンズ中心までの距離を合わせた値を用いてもよい。なお、距離Wの値はディスプレイ部16のタッチパネル機能等を介してナビゲーション装置1へ入力する。
【0047】
上述したように演算処理部8で平均化処理を経て算出された距離d1、d2、及び記憶部9に記憶されている基準距離D1、D2を用いて、制御処理部7は車両傾斜角算出手段として図8(b)の車両傾斜角θ2を算出すると共に、地面傾斜角算出手段として図8(c)の道路Rのみの傾斜角θ1を算出する。具体的には、先ず制御処理部7は、車両Sの前部Saに対して演算処理部8から送られた距離d1と記憶されている基準距離D1との前部距離差Δfd(Δfd=d1−D1)を求めると共に、車両Sの後部Sbに対して演算処理部8から送られた距離d2と記憶されている基準距離D2との後部距離差Δrd(Δrd=d2−D2)を求める。
【0048】
それから、制御処理部7は、前部距離差Δfdと後部距離差Δrdとの距離差Δd(Δd=Δfd−Δrd)を求め、最後に各ステレオカメラ10、11のレンズ中心間の水平距離W(図2(b)参照)及び三角関数(tan-1θ)を用いて、図8(b)に示す車両傾斜角θ2(θ2=tan-1(Δd/W))を求める。
【0049】
さらに、制御処理部7は、上述した処理で求めた車両傾斜角θ2を3Dジャイロセンサー5(特に、加速度センサー5b)の補正値として利用することで、図2(c)の道路Rのみの傾斜角θ1を得ている。具体的には、制御処理部7が3Dジャイロセンサー5の検出内容に基づき求めた全体の傾斜角θ3から車両傾斜角θ2を引くことで、道路Rのみの傾斜角θ1を求めている。
【0050】
なお、図1のナビゲーション装置1では、3Dジャイロセンサー5、制御処理部7、画像演算処理部8、記憶部9、及び各ステレオカメラ10、11を用いて各傾斜角θ1、θ2、θ3を求めていることから、上述した各部5、7〜11がナビゲーション装置1に内蔵される傾斜角算出装置として機能している。また、傾斜角算出装置に係る部分(5、7〜11)をまとめて、ナビゲーション装置用の部品ユニットの形態にすることも可能である。
【0051】
図4は、上述した構成のナビゲーション装置1による傾斜角算出に係る一連の処理手順を示すフローチャートである。以下、このフローチャートに従って本実施形態のナビゲーション装置1の傾斜角算出に係る処理の流れを説明する。
【0052】
先ず、ナビゲーション装置1は、準備段階として初期設定として入力される基準距離D1、D2を記憶部9に記録する(S1)。次に、ナビゲーション装置1は、電源が入れられて起動しているときに傾斜角を算出する必要がある場合、各ステレオカメラ10、11で複数回撮像を行う(S2)。それから、ナビゲーション装置1は、撮像により得られた画像情報毎に地面までの距離を求め、求めた各距離の平均化処理を行う(S3)。
【0053】
平均化処理により得られた車両Sの前部Saの距離d1及び後部Sbの距離d2、並びに基準距離D1、D2より、ナビゲーション装置1は前部距離差Δfd及び後部距離差Δrdを求めて車両前後での距離差Δd算出し(S4)、距離差Δd及び各ステレオカメラ10、11のレンズ中心間の水平距離Wを用いて三角関数により車両傾斜角θ2を算出する(S5)。さらに、ナビゲーション装置1は、3Dジャイロセンサー5からの検出結果により求めていた全体的な傾斜角θ3を車両傾斜角θ2で補正して、道路R(車両Sが位置する地面)の傾斜角θ1を算出する(S6)。
【0054】
傾斜角θ1の算出後、ナビゲーション装置1は、電源がオフされたか否かを判断し(S7)、電源がオフされていない場合(S7:NO)、各ステレオカメラ10、11による撮像の段階(S2)へ戻り、以降、電源がオフされるまでS2の段階からS7の段階までの処理を繰り返すことになる。また、電源がオフされた場合(S7:YES)、処理を終了する。このように本発明に係るナビゲーション装置1は、車両傾斜角θ2及び道路Rのみの傾斜角θ1を正確に求めることができる。
【0055】
また、本実施形態のナビゲーション装置1は、上述した処理で得た道路Rのみの傾斜角θ1を利用して、マップマッチング先の道路を特定する処理も行っている。具体的には、図6(a)及び図7(a)に示すように地表に設けられた一般道路41と高速道路へ進入するための傾斜した進入路42が近接して併行する場所でナビゲーション装置1の制御処理部7がマップマッチング処理を行う場合、道路Rのみの傾斜角θ1と地図データベース12に含まれる各道路41、42の傾斜角に係るデータを比較してマップマッチング先を特定している。
【0056】
図6(a)に示すように車両Sが殆ど傾斜していない一般道路41を走行している場合、ナビゲーション装置1で得られる道路の傾斜角θ1も0度に近くなることから、ナビゲーション装置1の制御処理部7は、地図データベース12に含まれる各道路41、42の傾斜情報と算出した傾斜角θ1の値とを比較し、差が少ない一般道路41をマップマッチング先として特定する。その結果、図6(b)に示すように車両Sの位置を示すアイコン43が一般道路41に合致するように制御処理部7はマップマッチング処理を行う。
【0057】
一方、図7(a)に示すように車両Sが傾斜している進入路42を走行している場合、ナビゲーション装置1で得られる道路の傾斜角θ1は進入路42の傾斜角と同等になる。そのため、ナビゲーション装置1の制御処理部7は、地図データベース12に含まれる各道路41、42の傾斜情報と算出した傾斜角θ1の値とを比較し、進入路42をマップマッチング先として特定し、図7(b)に示すように車両Sのアイコン43を進入路42に合致するように制御処理部7はマップマッチング処理を行う。このようなマップマッチング処理を制御処理部7が行うことで、本発明のナビゲーション装置1は従来に比べて実際の走行箇所に合致した表示を行える。
【0058】
なお、本発明に係るナビゲーション装置1は、上述した形態に限定されるものではなく、種々の変形例の適用が可能である。例えば、車両Sに取り付ける各ステレオカメラ10、11のように左右の撮像素子及び撮像レンズを備えたカメラ以外に、プリズム等で構成されるステレオアダプタを用いて1個の撮像素子で同一物体に対して視差を含んだ画像を撮像できるカメラを適用してもよく、この場合は、カメラ自体の小型化を図れるので、車両Sへの取付状態も良好にできる。
【0059】
また、車両Sの一部から地面までの距離に係る情報を取得する手段としては、上述したステレオ画像を撮像するカメラ以外に、地面へ向けて超音波を出射すると共に地面で反射した超音波を取り入れる超音波出入装置(超音波送受信機)を用いることも可能である。この場合、図2(a)(b)に示す各ステレオカメラ10、11と同様に車両Sの前後部Sa、Sbに超音波送受信機を取り付けると共に、図1の画像演算処理部8の替わりに各超音波送受信機と接続された距離演算部を設けることになる。この距離演算部は、各超音波送受信機が地面Gへ向けて超音波を出射してから地面Gで反射した超音波を取り入れるまでの時間を計測し、各距離d1、d2を算出することになる。なお、距離演算部は算出した各距離d1、d2を制御処理部7へ伝送する処理を行う。
【0060】
さらに、車両Sの一部から地面までの距離に係る情報を取得する手段(距離情報取得手段)としては、地面へ向けてレーザ光(光線)を出射すると共に地面で反射したレーザ光(反射光線)を取り入れて受光するレーザ光出入装置を用いてもよい。この場合も図2(a)(b)に示す各ステレオカメラ10、11と同様に車両Sの前後部Sa、Sbにレーザ光出入装置を取り付けると共に、図1の画像演算処理部8の替わりに各レーザ光出入装置と接続されたレーザ光用の距離演算部を設けることになる。この距離演算部も、各レーザ光出入装置が地面Gへ向けてレーザ光を出射してから地面Gで反射したレーザ光を取り入れるまでの時間を計測して各距離d1、d2を算出することになる。このように超音波送受信機又はレーザ光出入装置を適用した場合は、天候(晴天時、雨天時等)及び周囲の明暗等の影響に左右されることなく安定して各距離d1、d2を求められる。
【0061】
また、本発明に係るナビゲーション装置1の傾斜角算出機能は、車両Sのピッチ方向に対する車両傾斜角θ1以外にも、距離情報取得手段(ステレオカメラ等のカメラ、超音波送受信機、レーザ光出入装置)の車両Sへの取付箇所を変更することで、様々な方向の傾斜角を算出することができる。
【0062】
例えば、図5(a)に示すように、車両Sの左側面部Seに左側ステレオカメラ30を取り付けると共に、右側面図Sfに右側ステレオカメラ31を取り付け、両ステレオカメラ30、31が車両Sの幅方向の中心線Sdの上に位置させると共に、地面Gを撮像できるようにする。また、図1に示す記憶部9に左右両側のステレオカメラ30、31のレンズ中心間の水平距離を記憶させると共に、各ステレオカメラ30、31の算出対象となる各距離d3、d4に対応する基準距離D3、D4を記憶させ(図5(b)参照)、上述した処理と同様にすることで、垂直線Vに対して傾いた車両Sのロール方向の車両傾斜角θ5を算出できると共に、及び3Dジャイロセンサー5の検出結果より求めた全体的な傾斜角θ6と車両傾斜角θ5との差より道路Rのみの傾斜角θ4も算出できる(図5(c)参照)。
【0063】
なお、このように求めたロール方向の車両傾斜角θ5は、電子制御サスペンションに対するロール方向の姿勢制御、車両の操舵制御、トルク配分制御等にも利用できる。また、上述したピッチ方向の車両傾斜角θ2(図8(b)参照)も勿論、車両の各種制御(加減速制御、姿勢制御等)に利用できる。車両Sの左右以外にも、車両の対角方向に距離情報取得手段(ステレオカメラ等のカメラ、超音波送受信機、レーザ光出入装置)を取り付けることで、車両Sの対角方向に対する車両傾斜角をも算出可能となる。
【0064】
また、距離情報取得手段(ステレオカメラ等のカメラ、超音波送受信機、レーザ光出入装置)を車両Sに取り付ける個数は複数(2個以上)に限定されるものではなく、1個の距離情報取得手段を取り付けて簡易的に車両傾斜角を算出することも可能である。
【0065】
例えば、車両Sの前部Saのみにステレオカメラ10を取り付けると共に、車両を様々な傾斜角度で傾斜させた場合ごとに、ステレオカメラ10で測定される距離d1に対応する基準距離を車両傾斜角θ2と関連付けて予め測定しておき、この測定に基づく値(各基準距離とそれに対応する車両傾斜角θ2)を記憶したテーブル又は各測定値と車両傾斜角θ2の関係を導く関係式を記憶部9に記憶させておく。それから、ナビゲーション装置1の制御処理部7は、画像演算処理部8から送られてくる距離d1と記憶部9に記憶されたテーブル又は関係式より簡易的に車両傾斜角θ2を求めることができる。よって、この変形例に係る構成では、算出結果に対する精度の要求がシビアでない場合、簡易な構成で各種傾斜角を容易に得ることができる。
【図面の簡単な説明】
【0066】
【図1】本発明の実施形態に係るナビゲーション装置のブロック図である。
【図2】(a)はステレオカメラを前後部に取り付けた車両の側面図であり、(b)は車両の平面図である。
【図3】ステレオカメラによる距離算出を説明する概略図である。
【図4】傾斜角算出に係る一連の処理手順を示すフローチャートである。
【図5】(a)はステレオカメラを左右に取り付けた車両の平面図であり、(b)は車両の正面図、(b)は傾斜した道路に位置するロールした車両を示す正面図である。
【図6】(a)は傾斜した有料道路の進入路に併行する平坦な一般道路を走行する車両を示す概略図であり、(b)は(a)に示す車両位置をマップマッチングした地図の概略図である。
【図7】(a)は平坦な一般道路に併行する傾斜した有料道路の進入路を走行する車両を示す概略図であり、(b)は(a)に示す車両位置をマップマッチングした地図の概略図である。
【図8】(a)は、傾斜した道路に位置する車両を示す概略図であり、(b)はピッチ方向に傾斜した車両を示す概略図であり、(c)は傾斜した道路に位置するピッチ方向に傾斜した車両を示す概略図である。
【符号の説明】
【0067】
1 ナビゲーション装置
2 GPS受信機
3 ビーコン受信機
4 FM多重受信機
5 3Dジャイロセンサー
5a 振動ジャイロ
5b 加速度センサー
6 接続コネクタ
7 制御処理部
8 画像演算処理部
9 記憶部
10 前部ステレオカメラ
11 後部ステレオカメラ
12 地図データベース
S 車両
θ1 道路のみの傾斜角
θ2 車両傾斜角
【特許請求の範囲】
【請求項1】
車両の水平レベルに対する傾斜角を算出する車載用の傾斜角算出装置において、
車両の一部から地面までの基準距離を記憶する記憶手段と、
前記車両の一部から地面までの距離に係る情報を取得する距離情報取得手段と、
該距離情報取得手段が取得した情報に基づいて距離を算出する距離算出手段と、
該距離算出手段が算出した距離及び前記基準距離の距離差より車両自体の車両傾斜角を算出する車両傾斜角算出手段と
を備えることを特徴とする傾斜角算出装置。
【請求項2】
車両の水平レベルに対する傾斜角に係る情報を取得する傾斜角情報取得手段と、該傾斜角情報取得手段が取得した情報に基づいて傾斜角を算出する傾斜角算出手段とを備える車載用の傾斜角算出装置において、
車両の一部から地面までの距離を基準距離として記憶する記憶手段と、
前記車両の一部から地面までの距離に係る情報を取得する距離情報取得手段と、
該距離情報取得手段が取得した情報に基づいて距離を算出する距離算出手段と、
該距離算出手段が算出した距離及び前記基準距離の距離差より車両自体の車両傾斜角を算出する車両傾斜角算出手段と、
該車両傾斜角算出手段が算出した車両傾斜角及び前記傾斜角算出手段が算出した傾斜角の角度差より地面の傾斜角を算出する地面傾斜角算出手段と
を備えることを特徴とする傾斜角算出装置。
【請求項3】
前記距離情報取得手段は、情報を複数回取得するようにしてあり、
前記距離算出手段は、前記距離情報取得手段が取得した複数回の情報毎に算出した距離の平均化処理を行う請求項1又は請求項2に記載の傾斜角算出装置。
【請求項4】
前記距離情報取得手段は、複数であり、
複数の距離情報取得手段は、車両の相異する部分で地面までの距離に係る情報を取得するようにしてあり、
前記距離算出手段は、前記複数の距離情報取得手段が取得したそれぞれの情報に基づいて車両の相異する部分毎に距離を算出するようにしてあり、
前記記憶手段は、車両の相異する部分毎に複数の基準距離を記憶しており、
前記車両傾斜角算出手段は、車両の相異する部分毎での距離及び基準距離の距離差、並びに前記複数の距離情報取得手段の水平間隔より車両傾斜角を算出するようにしてある請求項1乃至請求項3のいずれか1つに記載の傾斜角算出装置。
【請求項5】
前記距離情報取得手段は、2つであり、
一方の距離情報取得手段は、車両の前部分で地面までの距離に係る情報を取得するようにしてあり、
他方の距離情報取得手段は、車両の後部分で地面までの距離に係る情報を取得するようにしてある請求項4に記載の傾斜角算出装置。
【請求項6】
前記距離情報取得手段は、同一物体に対して視差を含む画像を取得することが可能な撮像手段、超音波を出射して反射波を取り入れる超音波出入手段、又は光線を出射して反射光線を取り入れる光線出入手段のいずれかである請求項1乃至請求項5のいずれか1つに記載の傾斜角算出装置。
【請求項7】
位置情報を受信する位置情報受信手段と、該位置情報受信手段が受信した位置情報に基づいて算出した位置を地図上の道路に合致させるマップマッチング処理を行うマップマッチング手段とを備えるナビゲーション装置において、
請求項2乃至請求項6のいずれか1つに記載の傾斜角算出装置と、
傾斜程度に差がある複数の道路が近接する場所で前記マップマッチング手段がマップマッチング処理を行う場合、前記傾斜角算出装置が算出した地面の傾斜角に基づいてマップマッチング先の道路を特定する手段と
を備えることを特徴とするナビゲーション装置。
【請求項1】
車両の水平レベルに対する傾斜角を算出する車載用の傾斜角算出装置において、
車両の一部から地面までの基準距離を記憶する記憶手段と、
前記車両の一部から地面までの距離に係る情報を取得する距離情報取得手段と、
該距離情報取得手段が取得した情報に基づいて距離を算出する距離算出手段と、
該距離算出手段が算出した距離及び前記基準距離の距離差より車両自体の車両傾斜角を算出する車両傾斜角算出手段と
を備えることを特徴とする傾斜角算出装置。
【請求項2】
車両の水平レベルに対する傾斜角に係る情報を取得する傾斜角情報取得手段と、該傾斜角情報取得手段が取得した情報に基づいて傾斜角を算出する傾斜角算出手段とを備える車載用の傾斜角算出装置において、
車両の一部から地面までの距離を基準距離として記憶する記憶手段と、
前記車両の一部から地面までの距離に係る情報を取得する距離情報取得手段と、
該距離情報取得手段が取得した情報に基づいて距離を算出する距離算出手段と、
該距離算出手段が算出した距離及び前記基準距離の距離差より車両自体の車両傾斜角を算出する車両傾斜角算出手段と、
該車両傾斜角算出手段が算出した車両傾斜角及び前記傾斜角算出手段が算出した傾斜角の角度差より地面の傾斜角を算出する地面傾斜角算出手段と
を備えることを特徴とする傾斜角算出装置。
【請求項3】
前記距離情報取得手段は、情報を複数回取得するようにしてあり、
前記距離算出手段は、前記距離情報取得手段が取得した複数回の情報毎に算出した距離の平均化処理を行う請求項1又は請求項2に記載の傾斜角算出装置。
【請求項4】
前記距離情報取得手段は、複数であり、
複数の距離情報取得手段は、車両の相異する部分で地面までの距離に係る情報を取得するようにしてあり、
前記距離算出手段は、前記複数の距離情報取得手段が取得したそれぞれの情報に基づいて車両の相異する部分毎に距離を算出するようにしてあり、
前記記憶手段は、車両の相異する部分毎に複数の基準距離を記憶しており、
前記車両傾斜角算出手段は、車両の相異する部分毎での距離及び基準距離の距離差、並びに前記複数の距離情報取得手段の水平間隔より車両傾斜角を算出するようにしてある請求項1乃至請求項3のいずれか1つに記載の傾斜角算出装置。
【請求項5】
前記距離情報取得手段は、2つであり、
一方の距離情報取得手段は、車両の前部分で地面までの距離に係る情報を取得するようにしてあり、
他方の距離情報取得手段は、車両の後部分で地面までの距離に係る情報を取得するようにしてある請求項4に記載の傾斜角算出装置。
【請求項6】
前記距離情報取得手段は、同一物体に対して視差を含む画像を取得することが可能な撮像手段、超音波を出射して反射波を取り入れる超音波出入手段、又は光線を出射して反射光線を取り入れる光線出入手段のいずれかである請求項1乃至請求項5のいずれか1つに記載の傾斜角算出装置。
【請求項7】
位置情報を受信する位置情報受信手段と、該位置情報受信手段が受信した位置情報に基づいて算出した位置を地図上の道路に合致させるマップマッチング処理を行うマップマッチング手段とを備えるナビゲーション装置において、
請求項2乃至請求項6のいずれか1つに記載の傾斜角算出装置と、
傾斜程度に差がある複数の道路が近接する場所で前記マップマッチング手段がマップマッチング処理を行う場合、前記傾斜角算出装置が算出した地面の傾斜角に基づいてマップマッチング先の道路を特定する手段と
を備えることを特徴とするナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2006−275969(P2006−275969A)
【公開日】平成18年10月12日(2006.10.12)
【国際特許分類】
【出願番号】特願2005−99511(P2005−99511)
【出願日】平成17年3月30日(2005.3.30)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成18年10月12日(2006.10.12)
【国際特許分類】
【出願日】平成17年3月30日(2005.3.30)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]