
像変化判定装置、方法およびプログラム
【課題】非連続的に形成された静止物を解析対象として正確に移動体が移動しているか否かを判定する技術の提供。
【解決手段】車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車載カメラによって所定の周期で撮影された複数の画像を示す画像情報を取得し、前記複数の画像に含まれる前記静止物の像が前記車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する。
【解決手段】車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車載カメラによって所定の周期で撮影された複数の画像を示す画像情報を取得し、前記複数の画像に含まれる前記静止物の像が前記車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の周辺に存在する移動体の検出に利用可能な像変化判定装置、方法およびプログラムに関する。
【背景技術】
【0002】
従来、車両の周囲に移動体が存在するか否かを検出する装置が知られている。例えば、特許文献1に開示された技術には、車両の周辺を撮像した画像を示す画像情報を取得し、画像情報に含まれているべき地物の全部または一部が認識できない場合に車両と地物との間に障害物が存在すると検出する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−266975号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術においては、車両と地物との間に障害物が存在するか否かを検出することができるが、破線などの非連続的に形成された静止物を解析対象とした場合に車両の存在を正確に検出することは困難であった。すなわち、非連続的に形成された静止物を解析対象とした場合、静止物の像が認識されない部分は、移動体が静止物を遮ることによって認識されない場合と、静止物が存在しないことによって認識されない場合とによって生じ得る。しかし、車両等の検出対象が移動している場合、画像認識によって両者を区別することは困難である。
本発明は、上記課題にかんがみてなされたもので、非連続的に形成された静止物を解析対象として正確に移動体が移動しているか否かを判定する技術の提供を目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明においては、車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車載カメラによって所定の周期で複数の複数の画像を撮影し、当該複数の画像に含まれる静止物の像が移動体の移動に起因して変化したか否かを判定する。すなわち、本発明においては、車両の進行方向に沿って所定間隔で存在する静止物を車載カメラで撮影するため、走行中の車両に搭載された車載カメラで静止物を撮影すると、当該静止物の像は複数の画像間で所定間隔に対応した周期で変化する。一方、移動体は車両の周辺で移動しているため、車載カメラの視野内に存在する静止物が移動体によって遮られると、静止物の像は、上述の所定間隔に対応した周期での変化に加え、移動体の移動に応じた変化を行うことになる。従って、静止物の像の変化が、上述の所定間隔に対応した周期での変化のみならず、移動体の移動に伴う特徴的な変化を行っているか否かを判定することにより、車両の周囲において移動体が移動しているか否かを判定することができる。
【0006】
さらに、本発明においては、静止物の像の変化に基づいて移動体が移動しているか否かを判定するため、破線のペイントなど所定間隔で存在する静止物を解析対象にして車両の周辺に存在する移動体が移動しているか否かを判定することが可能になる。すなわち、所定間隔で非連続的に存在する静止物を解析対象とした場合、移動体が静止物を遮ることによって認識されない場合と、静止物が存在しないことによって認識されない場合とを画像認識によって区別することは困難である。しかし、本発明においては、静止物の像自体を解析対象としているため、このような区別をする必要はなく、画像認識によって容易に静止物の像が移動体の移動に起因して変形しているか否かを特定することが可能である。従って、所定間隔で存在する静止物を解析対象とした場合であっても正確に移動体が移動しているか否かを判定することが可能である。
【0007】
ここで、画像情報取得手段は、車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車載カメラによって所定の周期で撮影された複数の画像を示す画像情報を取得することができればよい。すなわち、所定間隔で存在する静止物の像の経時的変化を特定可能な画像情報を取得することができればよい。なお、車載カメラの視野には車両の進行方向に沿って所定間隔で存在する静止物が含まれ得る状態であるとともに、当該静止物と車載カメラとの間に移動体が存在し得る状態であればよい。従って、静止物が道路上に存在する場合、当該道路が視野に含まれるように車載カメラが車両に搭載される。
【0008】
また、車載カメラは車両の進行方向に沿って所定間隔で存在する静止物を視野に含むように車両に固定されていればよい。すなわち、車両の前方にて移動する移動体が存在するか否かを判定するためには、車両の前方が視野に含まれるように車載カメラを車両に対して設置すれば良い。同様に、車両の側方、後方のそれぞれにて移動する移動体が存在するか否かを判定するためには、車両の側方、後方のそれぞれが視野に含まれるように車載カメラを車両に対して設置すればよい。
【0009】
像変化判定手段は、静止物の像の変化に基づいて、前記静止物の像の変化が移動体の移動に起因するか否かを判定することができればよい。すなわち、複数の画像に含まれる特定の静止物の像を特定し、複数の画像間で静止物の像を比較することによって当該静止物の像の変化を特定する。そして、静止物の像の変化が車載カメラを搭載した車両自体の移動による変化のみならず、車両の周囲の移動体の移動に起因した変化を含むか否かを判定することができればよい。車両の周囲の移動体の移動に起因した変化を含むか否かは、移動体が静止物を遮ることによって生じる静止物の像の特徴的な変化を検出することによって判定すればよい。なお、移動体の移動体の移動に起因した変化に基づいて当該移動体の速度を取得する構成であってもよい。この場合、移動体の速度は車両との相対速度であっても良いし、道路上での移動体の速度であっても良い。
【0010】
さらに、道路上のペイントを解析対象の静止物とした場合の好適な構成例として、ペイントの像の端部の位置の変化に基づいて静止物の像が車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する構成を採用しても良い。すなわち、車載カメラの視野内で移動体がペイントを遮っている場合、ペイントの像の端部の位置の変化は移動体がペイントを遮っていない場合と異なる変化となる。そこで、当該ペイントの像の端部の位置の変化を解析することにより、ペイントの像が移動体の移動に起因して変化したか否かを判定し、移動体が移動していることを特定することが可能である。
【0011】
さらに、ペイントの像の長さの変化に基づいて静止物の像が車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する構成を採用しても良い。すなわち、車載カメラの視野内で移動体がペイントを遮っている場合、ペイントの像の長さの変化は移動体がペイントを遮っていない場合と異なる変化となる。そこで、当該ペイントの像の長さの変化を解析することにより、ペイントの像が移動体の移動に起因して変化したか否かを判定し、移動体が移動していることを特定することが可能である。
【0012】
さらに、本発明のように、静止物の像の変化に基づいて、移動体が移動することによって静止物の像が変化したか否かを判定する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0013】
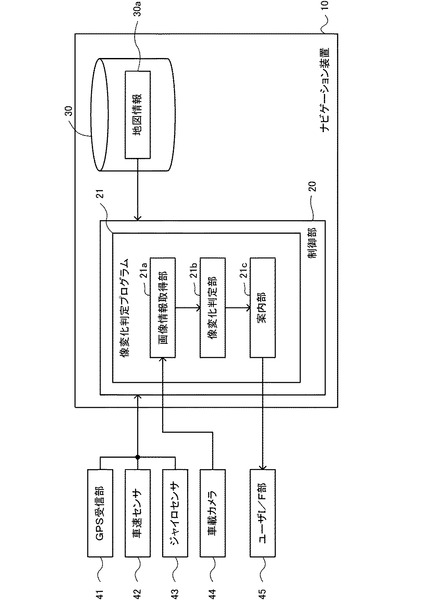
【図1】像変化判定装置を含むナビゲーション装置のブロック図である。
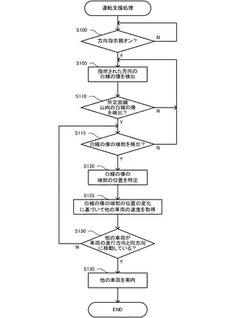
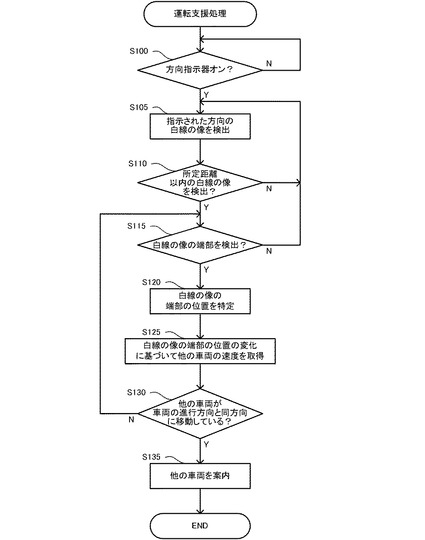
【図2】運転支援処理を示すフローチャートである。
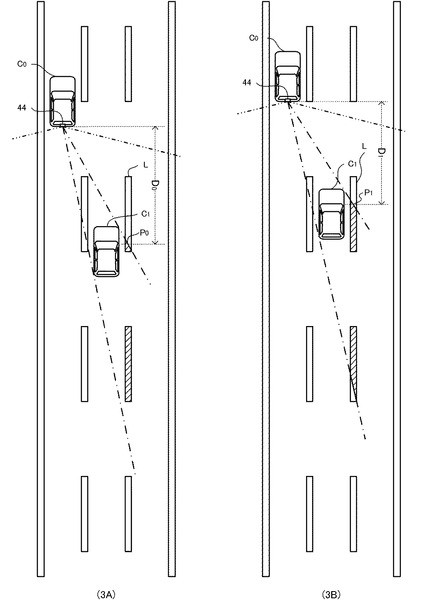
【図3】(3A)(3B)は、車両の後方から移動体が接近する状態を示す図である。
【発明を実施するための形態】
【0014】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)ナビゲーション装置の構成:
(2)像変化判定処理:
(3)他の実施形態:
【0015】
(1)ナビゲーション装置の構成:
図1は、本発明にかかる像変化判定装置を含むナビゲーション装置10の構成を示すブロック図である。ナビゲーション装置10は、車両に備えられている。ナビゲーション装置10は、CPU,RAM,ROM等を備える制御部20、記録媒体30を備えており、記録媒体30やROMに記憶されたプログラムを制御部20で実行することができる。記録媒体30には、予め地図情報30aが記録されている。地図情報30aは、車両の位置や案内対象の施設の特定に利用される情報であり、車両が走行する道路上に設定されたノードを示すノードデータ,ノード間の道路の形状を特定するための形状補間点データ,ノード同士の連結を示すリンクデータ,道路やその周辺に存在する地物を示すデータ等を含んでいる。
【0016】
また、本実施形態における車両は、GPS受信部41と車速センサ42とジャイロセンサ43と車載カメラ44とユーザI/F部45とを備えている。GPS受信部41は、GPS衛星からの電波を受信し、図示しないインタフェースを介して車両の現在位置を算出するための情報を出力する。制御部20は、この信号を取得して車両の現在位置を取得する。車速センサ42は、車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、車両の速度を取得する。ジャイロセンサ43は、車両に作用する角速度に対応した信号を出力する。制御部20は図示しないインタフェースを介してこの信号を取得し、車両の走行方向を取得する。車速センサ42およびジャイロセンサ43は、GPS受信部41の出力信号から特定される車両の現在位置を補正するなどのために利用される。また、車両の現在位置は、当該車両の走行軌跡に基づいて適宜補正される。制御部20は、図示しないナビゲーションプログラムの機能により、当該車両の現在位置および地図情報30aを利用して車両の運転者に対して経路案内を行うことが可能である。
【0017】
本実施形態においては、当該ナビゲーションプログラムの付加機能として車両の周辺に存在する移動体の存在を示す案内を実行することが可能であり、当該案内は像変化判定プログラム21によって実現される。像変化判定プログラム21は、車両の周辺の移動体(本実施形態においては他の車両)の速度を取得し、当該他の車両が車両の進行方向前方に向かって移動している場合に当該他の車両の存在を示す情報を案内する機能を備えている。
【0018】
像変化判定プログラム21は、画像情報取得部21aと像変化判定部21bと案内部21cとを備えている。画像情報取得部21aは、車両の周辺を撮影する車載カメラ44によって所定の周期で撮影された複数の画像を示す画像情報を取得する機能を制御部20に実現させるモジュールである。すなわち、車載カメラ44は、車両が走行する道路上に所定間隔で存在する破線の白線(以下単に白線とも呼ぶ)を視野に含むように車両に対して固定されたカメラであり、所定の周期で車両の後方の画像を撮影し、異なる複数の時刻にて撮影された画像を示す画像情報を生成して出力する。制御部20は、画像情報取得部21aの処理により、車載カメラ44が出力する画像情報を取得する。
【0019】
像変化判定部21bは、複数の画像に含まれる静止物の像が車両の後方に存在する他の車両の移動に起因して変化したか否かを判定する機能を制御部20に実現させるモジュールである。本実施形態においては、道路上の白線を解析対象の静止物としており、制御部20は、像変化判定部21bの処理により、画像情報を参照して白線の像を特定し、当該白線の像の経時的変化を特定する。さらに、制御部20は、当該白線の像の経時的変化が他の車両によって生じているとみなした場合の当該他の車両の速度を取得する。そして、制御部20は、当該他の車両の速度が車両の進行方向と同方向の速度である場合に静止物の像が他の車両の前方への移動に起因して変化したと判定する。
【0020】
案内部21cは、静止物の像が他の車両の前方への移動に起因して変化した場合、すなわち、車両の後方で他の車両が車両と同方向に移動している場合に他の車両の存在を示す情報を案内する機能を制御部20に実現させるモジュールである。具体的には、他の車両の速度が、車両の進行方向と同じ方向であり、かつ、0km/h以上の速さである場合に、制御部20は、案内部21cの処理により、当該他の車両の存在を示す情報を案内するための制御信号をユーザI/F部45に対して出力する。ユーザI/F部45は、運転者に各種の情報を提供するためのインタフェース部であり、図示しないディスプレイやスピーカ等を備えている。ユーザI/F部45は、他の車両の存在を示す情報を案内するための制御信号に基づいて、他の車両の存在を示す情報を案内するための画像および音声をユーザI/F部45から出力する。
【0021】
以上の構成によれば、車載カメラ44による撮影画像に基づいて車両の周辺で移動する他の車両が存在するか否かを特定し、車両の後方にて車両の進行方向と同じ方向(前方)に向けて移動している他の車両の存在を運転者に対して警告することが可能になる。なお、本実施形態においては、破線の白線の像の変化に基づいて移動体が移動しているか否かを判定するため、非連続的に存在する破線の白線など所定間隔で存在する静止物を解析対象にして車両の周辺に存在する移動体が移動しているか否かを判定することが可能になる。すなわち、所定間隔で非連続的に存在する静止物を解析対象とした場合、移動体が静止物を遮ることによって認識されない場合と、静止物が存在しないことによって認識されない場合とを画像認識によって区別することは困難である。しかし、本発明においては、静止物の像自体を解析対象としているため、このような区別をする必要はなく、画像認識によって容易に静止物の像が移動体の移動に起因して変形しているか否かを特定することが可能である。従って、所定間隔で存在する静止物を解析対象とした場合であっても正確に移動体が移動しているか否かを判定することが可能である。
【0022】
(2)像変化判定処理:
次に、像変化判定プログラム21による運転支援処理を説明する。図2は像変化判定プログラム21が実行する運転支援処理を示すフローチャートであり、図3A,3Bは、車両C0の後方から移動体である他の車両C1が接近する状態における運転支援の様子を説明する説明図である。図3A,3Bにおいて、車両C0は2本の連続的な白線を境界線とする片側3車線の道路を走行している。当該道路においては破線の白線と連続的な白線とによって車線が形成されている。また、車両C0は道路の最も左側の車線を走行しており、他の車両C1は車両C0の後方において道路の中央の車線を走行している。ここでは、図3A,3Bに示す例を適宜参照して図2に示す運転支援処理を説明する。
【0023】
像変化判定プログラム21の処理が開始されると、制御部20は、図示しない方向指示器の出力信号に基づいて方向指示器がオンになったか否かを判定し(ステップS100)、オンになったと判定されるまでステップS100を繰り返す。ステップS100にて方向指示器がオンになったと判定された場合、制御部20は、画像情報取得部21aおよび像変化判定部21bの処理により、当該方向指示器によって指示された方向の白線の像を検出する(ステップS105)。すなわち、制御部20は、画像情報取得部21aの処理により、車載カメラ44にて撮影された複数の画像を示す画像情報を取得する。また、制御部20は、像変化判定部21bの処理により、複数の画像のそれぞれにおいて、方向指示器の出力信号が示す指示方向側の道路上に存在する白線の像を検出する。
【0024】
例えば、図3A,3Bに示す例において、方向指示器の出力信号が示す指示方向が右側である場合、複数の画像のそれぞれにおいて車両C0の右側に存在する白線の像を検出する。ここでは、白線の像が検出されれば良く、その手法は特に限定されない。例えば、各画像を二値化するとともに二値化された画像に対してハフ変換を利用した直線検出処理を実施するなどして白線の像を検出することができる。
【0025】
次に、制御部20は、像変化判定部21bの処理により、所定距離以内の白線の像を検出したか否かを判定する(ステップS110)。すなわち、ステップS105において、方向指示器によって指示された方向の白線の像が検出され、かつ、当該検出された白線の像が車両C0から所定距離以内に存在する白線の像であるか否かを判定する。すなわち、本実施形態においては、他の車両C1の検出範囲を車両C0から所定距離以内の範囲に限定するため、車両C0から所定距離以内に存在する白線の像が検出されたか否かを判定することとしている。
【0026】
なお、所定距離以内の白線の像が検出されたか否かを判定するための構成は種々の構成を採用可能であり、例えば、車載カメラ44が車両C0に対して固定されていることを利用して、予め車載カメラ44の撮影画像内の道路上の白線の像の位置に対して車両C0からの進行方向に沿った距離を対応付けておく構成を採用可能である。この構成によれば、画像内の白線の像の位置に基づいて、当該白線の像の位置に対応する実空間上の位置と車両C0との進行方向に沿った距離を特定することが可能である。ステップS110にて、所定距離以内の白線の像を検出したと判定されない場合、ステップS105以降の処理を繰り返す。
【0027】
ステップS110にて、所定距離以内の白線の像を検出したと判定された場合、制御部20は、像変化判定部21bの処理により、白線の像の端部が検出されるか否かを判定する(ステップS115)。すなわち、制御部20は、車載カメラ44にて撮影された複数の画像のそれぞれにおいて検出された白線の像を幅方向に切断するエッジが存在するか否かを判定し、当該エッジが存在する場合に白線の像の端部が検出されたと判定する。ステップS115にて、白線の像の端部が検出されたと判定されない場合、ステップS105以降の処理を繰り返す。ステップS115にて、白線の像の端部が検出されたと判定された場合、制御部20は、像変化判定部21bの処理により、白線の像の端部の位置を検出する(ステップS120)。すなわち、制御部20は、車載カメラ44にて撮影された複数の画像のそれぞれにおいて検出された前記エッジの各画像内での位置を特定して白線の像の端部の位置とする。
【0028】
本実施形態においては、図3A,3Bに示すように、道路が延びる方向に沿って所定間隔で存在する白線の像を検出しているため、白線の像の端部が検出される場合、白線の真の端部が検出されている場合と、他の車両によって白線が遮られていることに起因して発生した端部が検出されている場合とのいずれかになる。図3A,3Bに示す例においては、車両C0に搭載された車載カメラ44の視野を二点鎖線で示しており、当該視野内で車両C0と白線Lとの間に他の車両C1が存在する場合の例を示している。この場合、他の車両C1によって白線Lの一部が遮られる。図3A,3Bにおいては、ハッチングによって白線L上で他の車両C1によって遮られる部分(死角部分)を示している。このように、白線Lが他の車両C1によって遮られる場合、白線Lの位置P0,P1に相当する部分は白線Lの像において端部を形成し、画像内のエッジ解析によって当該端部を特定し、その位置を特定することができる。なお、道路が延びる方向に沿って延びる白線の像においては、車両C0の進行方向の前方側と後方側に端部が形成され得るが、本実施形態においては、後方側の端部P0,P1を検出対象としている。
【0029】
次に、制御部20は、像変化判定部21bの処理により、白線の像の端部の位置の変化に基づいて他の車両の速度を取得する(ステップS125)。すなわち、本実施形態においては、白線の像の端部に相当する部分の実空間上での速度を他の車両の速度とみなす構成を採用している。具体的には、制御部20は、白線の像の端部に対応する実空間上の位置と車両C0との進行方向に沿った距離を特定し、当該距離の変化に基づいて車両C0と他の車両C1との相対速度を特定し、当該相対速度に基づいて他の車両の速度を特定する。
【0030】
例えば、図3A,3Bに示す例においては、まず、図3Aに示す状態で撮影された画像から、白線の像の端部に対応する実空間上の位置P0と車両C0との進行方向に沿った距離がD0であることが特定され、図3Bに示す状態で撮影された画像から、白線の像の端部に対応する実空間上の位置P1と車両C0との進行方向に沿った距離がD1であることが特定される。そして、制御部20は、画像の撮影周期に基づいて図3Aから図3Bまでの時間経過Tを特定し、(D0−D1)/Tとして車両C0と他の車両C1との相対速度(km/h)を特定する。さらに、制御部20は、車速センサ42の出力信号に基づいて車両C0の速度(km/h)を特定し、当該車両C0の速度と上述の相対速度との和によって他の車両C1の速度を取得する。
【0031】
次に、制御部20は、案内部21cの処理により、他の車両C1が車両C0の進行方向と同方向に移動しているか否かを判定する(ステップS130)。すなわち、制御部20は、他の車両C1の速度が0km/hより大きい場合か否かを判定することにより、車両C0の後方に存在する他の車両C1が車両C0に接近し、または、前方に移動しているか否かを判定する。ステップS130にて、他の車両C1が車両C0の進行方向と同方向に移動していると判定されない場合、制御部20は、ステップS115以降の処理を繰り返す。
【0032】
ステップS130にて、他の車両C1が車両C0の進行方向と同方向に移動していると判定された場合、制御部20は、後方に他の車両C1が存在することを示す案内を行う。すなわち、制御部20は、ユーザI/F部45に対して制御信号を出力し、ユーザI/F部45から他の車両C1の存在を示す画像および音声を出力させる。この構成により、運転者は、方向指示器によって指示した方向(車線変更によって移動する意図を示した方向)に後続車両が存在する場合にその存在を容易に認識することが可能になる。なお、ステップS100にて、方向指示器がオンになったと判定された後、所定期間以内にステップS135が実施されない場合、図2に示す処理は強制終了される。
【0033】
(3)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、静止物の像の変化に基づいて、移動体が移動することによって静止物の像が変化したか否かを判定する限りにおいて、他にも種々の実施形態を採用可能である。例えば、検出対象となる他の車両は他の車両に限定されず、自転車や歩行者であっても良い。また、移動体が移動しているか否かを判定する限りにおいて、その移動方向は限定されず、車両から遠ざかる移動体の存在を検出しても良い。
【0034】
また、車載カメラ44は車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車両に固定されていればよい。従って、車両の後方のみならず、車両の前方や側方において所定間隔で存在する静止物が視野に含まれるように車載カメラ44を車両に対して設置してもよい。さらに、車両と移動体との相対速度を取得し、車両に対して接近する移動体に対する警告を行う構成としても良い。
【0035】
さらに、ペイントの像の長さの変化に基づいて静止物の像が車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する構成を採用しても良い。すなわち、車載カメラの視野内で移動体がペイントを遮っている場合、ペイントの像の長さの変化は移動体がペイントを遮っていない場合と異なる変化となる。そこで、当該ペイントの像の長さの変化を解析することにより、ペイントの像が移動体の移動に起因して変化したか否かを判定し、移動体が移動していることを特定する構成としても良い。
【0036】
さらに、所定間隔で存在する静止物の像は、車両の速度に同期した周期で変化するため、白線の像において当該周期での変化と異なる変化が検出された場合に移動体の移動によって白線の像が変化したとみなす構成としても良い。
【符号の説明】
【0037】
10…ナビゲーション装置、20…制御部、21…像変化判定プログラム、21a…画像情報取得部、21b…像変化判定部、21c…案内部、30…記録媒体、30a…地図情報、41…GPS受信部、42…車速センサ、43…ジャイロセンサ、44…車載カメラ、45…ユーザI/F部
【技術分野】
【0001】
本発明は、車両の周辺に存在する移動体の検出に利用可能な像変化判定装置、方法およびプログラムに関する。
【背景技術】
【0002】
従来、車両の周囲に移動体が存在するか否かを検出する装置が知られている。例えば、特許文献1に開示された技術には、車両の周辺を撮像した画像を示す画像情報を取得し、画像情報に含まれているべき地物の全部または一部が認識できない場合に車両と地物との間に障害物が存在すると検出する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−266975号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術においては、車両と地物との間に障害物が存在するか否かを検出することができるが、破線などの非連続的に形成された静止物を解析対象とした場合に車両の存在を正確に検出することは困難であった。すなわち、非連続的に形成された静止物を解析対象とした場合、静止物の像が認識されない部分は、移動体が静止物を遮ることによって認識されない場合と、静止物が存在しないことによって認識されない場合とによって生じ得る。しかし、車両等の検出対象が移動している場合、画像認識によって両者を区別することは困難である。
本発明は、上記課題にかんがみてなされたもので、非連続的に形成された静止物を解析対象として正確に移動体が移動しているか否かを判定する技術の提供を目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明においては、車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車載カメラによって所定の周期で複数の複数の画像を撮影し、当該複数の画像に含まれる静止物の像が移動体の移動に起因して変化したか否かを判定する。すなわち、本発明においては、車両の進行方向に沿って所定間隔で存在する静止物を車載カメラで撮影するため、走行中の車両に搭載された車載カメラで静止物を撮影すると、当該静止物の像は複数の画像間で所定間隔に対応した周期で変化する。一方、移動体は車両の周辺で移動しているため、車載カメラの視野内に存在する静止物が移動体によって遮られると、静止物の像は、上述の所定間隔に対応した周期での変化に加え、移動体の移動に応じた変化を行うことになる。従って、静止物の像の変化が、上述の所定間隔に対応した周期での変化のみならず、移動体の移動に伴う特徴的な変化を行っているか否かを判定することにより、車両の周囲において移動体が移動しているか否かを判定することができる。
【0006】
さらに、本発明においては、静止物の像の変化に基づいて移動体が移動しているか否かを判定するため、破線のペイントなど所定間隔で存在する静止物を解析対象にして車両の周辺に存在する移動体が移動しているか否かを判定することが可能になる。すなわち、所定間隔で非連続的に存在する静止物を解析対象とした場合、移動体が静止物を遮ることによって認識されない場合と、静止物が存在しないことによって認識されない場合とを画像認識によって区別することは困難である。しかし、本発明においては、静止物の像自体を解析対象としているため、このような区別をする必要はなく、画像認識によって容易に静止物の像が移動体の移動に起因して変形しているか否かを特定することが可能である。従って、所定間隔で存在する静止物を解析対象とした場合であっても正確に移動体が移動しているか否かを判定することが可能である。
【0007】
ここで、画像情報取得手段は、車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車載カメラによって所定の周期で撮影された複数の画像を示す画像情報を取得することができればよい。すなわち、所定間隔で存在する静止物の像の経時的変化を特定可能な画像情報を取得することができればよい。なお、車載カメラの視野には車両の進行方向に沿って所定間隔で存在する静止物が含まれ得る状態であるとともに、当該静止物と車載カメラとの間に移動体が存在し得る状態であればよい。従って、静止物が道路上に存在する場合、当該道路が視野に含まれるように車載カメラが車両に搭載される。
【0008】
また、車載カメラは車両の進行方向に沿って所定間隔で存在する静止物を視野に含むように車両に固定されていればよい。すなわち、車両の前方にて移動する移動体が存在するか否かを判定するためには、車両の前方が視野に含まれるように車載カメラを車両に対して設置すれば良い。同様に、車両の側方、後方のそれぞれにて移動する移動体が存在するか否かを判定するためには、車両の側方、後方のそれぞれが視野に含まれるように車載カメラを車両に対して設置すればよい。
【0009】
像変化判定手段は、静止物の像の変化に基づいて、前記静止物の像の変化が移動体の移動に起因するか否かを判定することができればよい。すなわち、複数の画像に含まれる特定の静止物の像を特定し、複数の画像間で静止物の像を比較することによって当該静止物の像の変化を特定する。そして、静止物の像の変化が車載カメラを搭載した車両自体の移動による変化のみならず、車両の周囲の移動体の移動に起因した変化を含むか否かを判定することができればよい。車両の周囲の移動体の移動に起因した変化を含むか否かは、移動体が静止物を遮ることによって生じる静止物の像の特徴的な変化を検出することによって判定すればよい。なお、移動体の移動体の移動に起因した変化に基づいて当該移動体の速度を取得する構成であってもよい。この場合、移動体の速度は車両との相対速度であっても良いし、道路上での移動体の速度であっても良い。
【0010】
さらに、道路上のペイントを解析対象の静止物とした場合の好適な構成例として、ペイントの像の端部の位置の変化に基づいて静止物の像が車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する構成を採用しても良い。すなわち、車載カメラの視野内で移動体がペイントを遮っている場合、ペイントの像の端部の位置の変化は移動体がペイントを遮っていない場合と異なる変化となる。そこで、当該ペイントの像の端部の位置の変化を解析することにより、ペイントの像が移動体の移動に起因して変化したか否かを判定し、移動体が移動していることを特定することが可能である。
【0011】
さらに、ペイントの像の長さの変化に基づいて静止物の像が車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する構成を採用しても良い。すなわち、車載カメラの視野内で移動体がペイントを遮っている場合、ペイントの像の長さの変化は移動体がペイントを遮っていない場合と異なる変化となる。そこで、当該ペイントの像の長さの変化を解析することにより、ペイントの像が移動体の移動に起因して変化したか否かを判定し、移動体が移動していることを特定することが可能である。
【0012】
さらに、本発明のように、静止物の像の変化に基づいて、移動体が移動することによって静止物の像が変化したか否かを判定する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0013】
【図1】像変化判定装置を含むナビゲーション装置のブロック図である。
【図2】運転支援処理を示すフローチャートである。
【図3】(3A)(3B)は、車両の後方から移動体が接近する状態を示す図である。
【発明を実施するための形態】
【0014】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)ナビゲーション装置の構成:
(2)像変化判定処理:
(3)他の実施形態:
【0015】
(1)ナビゲーション装置の構成:
図1は、本発明にかかる像変化判定装置を含むナビゲーション装置10の構成を示すブロック図である。ナビゲーション装置10は、車両に備えられている。ナビゲーション装置10は、CPU,RAM,ROM等を備える制御部20、記録媒体30を備えており、記録媒体30やROMに記憶されたプログラムを制御部20で実行することができる。記録媒体30には、予め地図情報30aが記録されている。地図情報30aは、車両の位置や案内対象の施設の特定に利用される情報であり、車両が走行する道路上に設定されたノードを示すノードデータ,ノード間の道路の形状を特定するための形状補間点データ,ノード同士の連結を示すリンクデータ,道路やその周辺に存在する地物を示すデータ等を含んでいる。
【0016】
また、本実施形態における車両は、GPS受信部41と車速センサ42とジャイロセンサ43と車載カメラ44とユーザI/F部45とを備えている。GPS受信部41は、GPS衛星からの電波を受信し、図示しないインタフェースを介して車両の現在位置を算出するための情報を出力する。制御部20は、この信号を取得して車両の現在位置を取得する。車速センサ42は、車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、車両の速度を取得する。ジャイロセンサ43は、車両に作用する角速度に対応した信号を出力する。制御部20は図示しないインタフェースを介してこの信号を取得し、車両の走行方向を取得する。車速センサ42およびジャイロセンサ43は、GPS受信部41の出力信号から特定される車両の現在位置を補正するなどのために利用される。また、車両の現在位置は、当該車両の走行軌跡に基づいて適宜補正される。制御部20は、図示しないナビゲーションプログラムの機能により、当該車両の現在位置および地図情報30aを利用して車両の運転者に対して経路案内を行うことが可能である。
【0017】
本実施形態においては、当該ナビゲーションプログラムの付加機能として車両の周辺に存在する移動体の存在を示す案内を実行することが可能であり、当該案内は像変化判定プログラム21によって実現される。像変化判定プログラム21は、車両の周辺の移動体(本実施形態においては他の車両)の速度を取得し、当該他の車両が車両の進行方向前方に向かって移動している場合に当該他の車両の存在を示す情報を案内する機能を備えている。
【0018】
像変化判定プログラム21は、画像情報取得部21aと像変化判定部21bと案内部21cとを備えている。画像情報取得部21aは、車両の周辺を撮影する車載カメラ44によって所定の周期で撮影された複数の画像を示す画像情報を取得する機能を制御部20に実現させるモジュールである。すなわち、車載カメラ44は、車両が走行する道路上に所定間隔で存在する破線の白線(以下単に白線とも呼ぶ)を視野に含むように車両に対して固定されたカメラであり、所定の周期で車両の後方の画像を撮影し、異なる複数の時刻にて撮影された画像を示す画像情報を生成して出力する。制御部20は、画像情報取得部21aの処理により、車載カメラ44が出力する画像情報を取得する。
【0019】
像変化判定部21bは、複数の画像に含まれる静止物の像が車両の後方に存在する他の車両の移動に起因して変化したか否かを判定する機能を制御部20に実現させるモジュールである。本実施形態においては、道路上の白線を解析対象の静止物としており、制御部20は、像変化判定部21bの処理により、画像情報を参照して白線の像を特定し、当該白線の像の経時的変化を特定する。さらに、制御部20は、当該白線の像の経時的変化が他の車両によって生じているとみなした場合の当該他の車両の速度を取得する。そして、制御部20は、当該他の車両の速度が車両の進行方向と同方向の速度である場合に静止物の像が他の車両の前方への移動に起因して変化したと判定する。
【0020】
案内部21cは、静止物の像が他の車両の前方への移動に起因して変化した場合、すなわち、車両の後方で他の車両が車両と同方向に移動している場合に他の車両の存在を示す情報を案内する機能を制御部20に実現させるモジュールである。具体的には、他の車両の速度が、車両の進行方向と同じ方向であり、かつ、0km/h以上の速さである場合に、制御部20は、案内部21cの処理により、当該他の車両の存在を示す情報を案内するための制御信号をユーザI/F部45に対して出力する。ユーザI/F部45は、運転者に各種の情報を提供するためのインタフェース部であり、図示しないディスプレイやスピーカ等を備えている。ユーザI/F部45は、他の車両の存在を示す情報を案内するための制御信号に基づいて、他の車両の存在を示す情報を案内するための画像および音声をユーザI/F部45から出力する。
【0021】
以上の構成によれば、車載カメラ44による撮影画像に基づいて車両の周辺で移動する他の車両が存在するか否かを特定し、車両の後方にて車両の進行方向と同じ方向(前方)に向けて移動している他の車両の存在を運転者に対して警告することが可能になる。なお、本実施形態においては、破線の白線の像の変化に基づいて移動体が移動しているか否かを判定するため、非連続的に存在する破線の白線など所定間隔で存在する静止物を解析対象にして車両の周辺に存在する移動体が移動しているか否かを判定することが可能になる。すなわち、所定間隔で非連続的に存在する静止物を解析対象とした場合、移動体が静止物を遮ることによって認識されない場合と、静止物が存在しないことによって認識されない場合とを画像認識によって区別することは困難である。しかし、本発明においては、静止物の像自体を解析対象としているため、このような区別をする必要はなく、画像認識によって容易に静止物の像が移動体の移動に起因して変形しているか否かを特定することが可能である。従って、所定間隔で存在する静止物を解析対象とした場合であっても正確に移動体が移動しているか否かを判定することが可能である。
【0022】
(2)像変化判定処理:
次に、像変化判定プログラム21による運転支援処理を説明する。図2は像変化判定プログラム21が実行する運転支援処理を示すフローチャートであり、図3A,3Bは、車両C0の後方から移動体である他の車両C1が接近する状態における運転支援の様子を説明する説明図である。図3A,3Bにおいて、車両C0は2本の連続的な白線を境界線とする片側3車線の道路を走行している。当該道路においては破線の白線と連続的な白線とによって車線が形成されている。また、車両C0は道路の最も左側の車線を走行しており、他の車両C1は車両C0の後方において道路の中央の車線を走行している。ここでは、図3A,3Bに示す例を適宜参照して図2に示す運転支援処理を説明する。
【0023】
像変化判定プログラム21の処理が開始されると、制御部20は、図示しない方向指示器の出力信号に基づいて方向指示器がオンになったか否かを判定し(ステップS100)、オンになったと判定されるまでステップS100を繰り返す。ステップS100にて方向指示器がオンになったと判定された場合、制御部20は、画像情報取得部21aおよび像変化判定部21bの処理により、当該方向指示器によって指示された方向の白線の像を検出する(ステップS105)。すなわち、制御部20は、画像情報取得部21aの処理により、車載カメラ44にて撮影された複数の画像を示す画像情報を取得する。また、制御部20は、像変化判定部21bの処理により、複数の画像のそれぞれにおいて、方向指示器の出力信号が示す指示方向側の道路上に存在する白線の像を検出する。
【0024】
例えば、図3A,3Bに示す例において、方向指示器の出力信号が示す指示方向が右側である場合、複数の画像のそれぞれにおいて車両C0の右側に存在する白線の像を検出する。ここでは、白線の像が検出されれば良く、その手法は特に限定されない。例えば、各画像を二値化するとともに二値化された画像に対してハフ変換を利用した直線検出処理を実施するなどして白線の像を検出することができる。
【0025】
次に、制御部20は、像変化判定部21bの処理により、所定距離以内の白線の像を検出したか否かを判定する(ステップS110)。すなわち、ステップS105において、方向指示器によって指示された方向の白線の像が検出され、かつ、当該検出された白線の像が車両C0から所定距離以内に存在する白線の像であるか否かを判定する。すなわち、本実施形態においては、他の車両C1の検出範囲を車両C0から所定距離以内の範囲に限定するため、車両C0から所定距離以内に存在する白線の像が検出されたか否かを判定することとしている。
【0026】
なお、所定距離以内の白線の像が検出されたか否かを判定するための構成は種々の構成を採用可能であり、例えば、車載カメラ44が車両C0に対して固定されていることを利用して、予め車載カメラ44の撮影画像内の道路上の白線の像の位置に対して車両C0からの進行方向に沿った距離を対応付けておく構成を採用可能である。この構成によれば、画像内の白線の像の位置に基づいて、当該白線の像の位置に対応する実空間上の位置と車両C0との進行方向に沿った距離を特定することが可能である。ステップS110にて、所定距離以内の白線の像を検出したと判定されない場合、ステップS105以降の処理を繰り返す。
【0027】
ステップS110にて、所定距離以内の白線の像を検出したと判定された場合、制御部20は、像変化判定部21bの処理により、白線の像の端部が検出されるか否かを判定する(ステップS115)。すなわち、制御部20は、車載カメラ44にて撮影された複数の画像のそれぞれにおいて検出された白線の像を幅方向に切断するエッジが存在するか否かを判定し、当該エッジが存在する場合に白線の像の端部が検出されたと判定する。ステップS115にて、白線の像の端部が検出されたと判定されない場合、ステップS105以降の処理を繰り返す。ステップS115にて、白線の像の端部が検出されたと判定された場合、制御部20は、像変化判定部21bの処理により、白線の像の端部の位置を検出する(ステップS120)。すなわち、制御部20は、車載カメラ44にて撮影された複数の画像のそれぞれにおいて検出された前記エッジの各画像内での位置を特定して白線の像の端部の位置とする。
【0028】
本実施形態においては、図3A,3Bに示すように、道路が延びる方向に沿って所定間隔で存在する白線の像を検出しているため、白線の像の端部が検出される場合、白線の真の端部が検出されている場合と、他の車両によって白線が遮られていることに起因して発生した端部が検出されている場合とのいずれかになる。図3A,3Bに示す例においては、車両C0に搭載された車載カメラ44の視野を二点鎖線で示しており、当該視野内で車両C0と白線Lとの間に他の車両C1が存在する場合の例を示している。この場合、他の車両C1によって白線Lの一部が遮られる。図3A,3Bにおいては、ハッチングによって白線L上で他の車両C1によって遮られる部分(死角部分)を示している。このように、白線Lが他の車両C1によって遮られる場合、白線Lの位置P0,P1に相当する部分は白線Lの像において端部を形成し、画像内のエッジ解析によって当該端部を特定し、その位置を特定することができる。なお、道路が延びる方向に沿って延びる白線の像においては、車両C0の進行方向の前方側と後方側に端部が形成され得るが、本実施形態においては、後方側の端部P0,P1を検出対象としている。
【0029】
次に、制御部20は、像変化判定部21bの処理により、白線の像の端部の位置の変化に基づいて他の車両の速度を取得する(ステップS125)。すなわち、本実施形態においては、白線の像の端部に相当する部分の実空間上での速度を他の車両の速度とみなす構成を採用している。具体的には、制御部20は、白線の像の端部に対応する実空間上の位置と車両C0との進行方向に沿った距離を特定し、当該距離の変化に基づいて車両C0と他の車両C1との相対速度を特定し、当該相対速度に基づいて他の車両の速度を特定する。
【0030】
例えば、図3A,3Bに示す例においては、まず、図3Aに示す状態で撮影された画像から、白線の像の端部に対応する実空間上の位置P0と車両C0との進行方向に沿った距離がD0であることが特定され、図3Bに示す状態で撮影された画像から、白線の像の端部に対応する実空間上の位置P1と車両C0との進行方向に沿った距離がD1であることが特定される。そして、制御部20は、画像の撮影周期に基づいて図3Aから図3Bまでの時間経過Tを特定し、(D0−D1)/Tとして車両C0と他の車両C1との相対速度(km/h)を特定する。さらに、制御部20は、車速センサ42の出力信号に基づいて車両C0の速度(km/h)を特定し、当該車両C0の速度と上述の相対速度との和によって他の車両C1の速度を取得する。
【0031】
次に、制御部20は、案内部21cの処理により、他の車両C1が車両C0の進行方向と同方向に移動しているか否かを判定する(ステップS130)。すなわち、制御部20は、他の車両C1の速度が0km/hより大きい場合か否かを判定することにより、車両C0の後方に存在する他の車両C1が車両C0に接近し、または、前方に移動しているか否かを判定する。ステップS130にて、他の車両C1が車両C0の進行方向と同方向に移動していると判定されない場合、制御部20は、ステップS115以降の処理を繰り返す。
【0032】
ステップS130にて、他の車両C1が車両C0の進行方向と同方向に移動していると判定された場合、制御部20は、後方に他の車両C1が存在することを示す案内を行う。すなわち、制御部20は、ユーザI/F部45に対して制御信号を出力し、ユーザI/F部45から他の車両C1の存在を示す画像および音声を出力させる。この構成により、運転者は、方向指示器によって指示した方向(車線変更によって移動する意図を示した方向)に後続車両が存在する場合にその存在を容易に認識することが可能になる。なお、ステップS100にて、方向指示器がオンになったと判定された後、所定期間以内にステップS135が実施されない場合、図2に示す処理は強制終了される。
【0033】
(3)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、静止物の像の変化に基づいて、移動体が移動することによって静止物の像が変化したか否かを判定する限りにおいて、他にも種々の実施形態を採用可能である。例えば、検出対象となる他の車両は他の車両に限定されず、自転車や歩行者であっても良い。また、移動体が移動しているか否かを判定する限りにおいて、その移動方向は限定されず、車両から遠ざかる移動体の存在を検出しても良い。
【0034】
また、車載カメラ44は車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車両に固定されていればよい。従って、車両の後方のみならず、車両の前方や側方において所定間隔で存在する静止物が視野に含まれるように車載カメラ44を車両に対して設置してもよい。さらに、車両と移動体との相対速度を取得し、車両に対して接近する移動体に対する警告を行う構成としても良い。
【0035】
さらに、ペイントの像の長さの変化に基づいて静止物の像が車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する構成を採用しても良い。すなわち、車載カメラの視野内で移動体がペイントを遮っている場合、ペイントの像の長さの変化は移動体がペイントを遮っていない場合と異なる変化となる。そこで、当該ペイントの像の長さの変化を解析することにより、ペイントの像が移動体の移動に起因して変化したか否かを判定し、移動体が移動していることを特定する構成としても良い。
【0036】
さらに、所定間隔で存在する静止物の像は、車両の速度に同期した周期で変化するため、白線の像において当該周期での変化と異なる変化が検出された場合に移動体の移動によって白線の像が変化したとみなす構成としても良い。
【符号の説明】
【0037】
10…ナビゲーション装置、20…制御部、21…像変化判定プログラム、21a…画像情報取得部、21b…像変化判定部、21c…案内部、30…記録媒体、30a…地図情報、41…GPS受信部、42…車速センサ、43…ジャイロセンサ、44…車載カメラ、45…ユーザI/F部
【特許請求の範囲】
【請求項1】
車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車載カメラによって所定の周期で撮影された複数の画像を示す画像情報を取得する画像情報取得手段と、
前記複数の画像に含まれる前記静止物の像が前記車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する像変化判定手段と、
を備える像変化判定装置。
【請求項2】
前記静止物は前記車両が走行する道路上のペイントであり、
前記像変化判定手段は、前記ペイントの像の端部の位置の変化に基づいて、前記静止物の像が前記車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する、
請求項1に記載の像変化判定装置。
【請求項3】
前記静止物は前記車両が走行する道路上のペイントであり、
前記像変化判定手段は、前記ペイントの像の長さの変化に基づいて、前記静止物の像が前記車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する、
請求項1または請求項2のいずれかに記載の像変化判定装置。
【請求項4】
車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車載カメラによって所定の周期で撮影された複数の画像を示す画像情報を取得する画像情報取得工程と、
前記複数の画像に含まれる前記静止物の像が前記車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する像変化判定工程と、
を含む像変化判定方法。
【請求項5】
車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車載カメラによって所定の周期で撮影された複数の画像を示す画像情報を取得する画像情報取得機能と、
前記複数の画像に含まれる前記静止物の像が前記車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する像変化判定機能と、
をコンピュータに実現させる像変化判定プログラム。
【請求項1】
車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車載カメラによって所定の周期で撮影された複数の画像を示す画像情報を取得する画像情報取得手段と、
前記複数の画像に含まれる前記静止物の像が前記車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する像変化判定手段と、
を備える像変化判定装置。
【請求項2】
前記静止物は前記車両が走行する道路上のペイントであり、
前記像変化判定手段は、前記ペイントの像の端部の位置の変化に基づいて、前記静止物の像が前記車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する、
請求項1に記載の像変化判定装置。
【請求項3】
前記静止物は前記車両が走行する道路上のペイントであり、
前記像変化判定手段は、前記ペイントの像の長さの変化に基づいて、前記静止物の像が前記車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する、
請求項1または請求項2のいずれかに記載の像変化判定装置。
【請求項4】
車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車載カメラによって所定の周期で撮影された複数の画像を示す画像情報を取得する画像情報取得工程と、
前記複数の画像に含まれる前記静止物の像が前記車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する像変化判定工程と、
を含む像変化判定方法。
【請求項5】
車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車載カメラによって所定の周期で撮影された複数の画像を示す画像情報を取得する画像情報取得機能と、
前記複数の画像に含まれる前記静止物の像が前記車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する像変化判定機能と、
をコンピュータに実現させる像変化判定プログラム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2011−198035(P2011−198035A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−64126(P2010−64126)
【出願日】平成22年3月19日(2010.3.19)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月19日(2010.3.19)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]