
元素分析装置
【課題】下部電極上にるつぼを搬送する搬送ユニットと下部電極を清掃する清掃ユニットを一体化し、下部電極へのるつぼの供給、下部電極からのるつぼの廃棄及び電極の清掃を行う。
【解決手段】元素分析装置100が、るつぼ設置部23から下部電極11上にるつぼRを搬送するとともに、電極11、12を清掃する搬送・清掃ユニット3を備えている。この搬送・清掃ユニット3は、電極11、12を清掃するための清掃体311、312、及びるつぼRを把持する把持部313を有するアーム部31と、清掃体311、312が電極11、12と対向する対向位置R1、把持部313に把持されたるつぼRを下部電極11上に載置する載置位置R4、及び対向位置R1及び載置位置R4から離間した退避位置R2にアーム部31を回転移動して停止させる回転駆動機構32と、有する。
【解決手段】元素分析装置100が、るつぼ設置部23から下部電極11上にるつぼRを搬送するとともに、電極11、12を清掃する搬送・清掃ユニット3を備えている。この搬送・清掃ユニット3は、電極11、12を清掃するための清掃体311、312、及びるつぼRを把持する把持部313を有するアーム部31と、清掃体311、312が電極11、12と対向する対向位置R1、把持部313に把持されたるつぼRを下部電極11上に載置する載置位置R4、及び対向位置R1及び載置位置R4から離間した退避位置R2にアーム部31を回転移動して停止させる回転駆動機構32と、有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば鉄鋼や非鉄金属、セラミックスなどの測定試料中に含まれる窒素(N)、水素(H)、酸素(O)等の元素を分析する元素分析装置に関し、特に元素分析装置に用いられる上部電極及び下部電極を清掃するための清掃ユニット及び下部電極上にるつぼを搬送する搬送ユニットに関するものである。
【背景技術】
【0002】
この種の元素分析装置は、例えば特許文献1に示すように、上部電極及び下部電極に狭持されたるつぼに測定試料を収容して、電圧を印加することにより、るつぼ内の測定試料を加熱溶解して、それによって生じたガスを分析して前記測定試料の元素を分析している。
【0003】
このように、上部電極及び下部電極は黒鉛るつぼと接触しており、また、溶解した測定試料、フラックス等の一部が飛散して付着することから、上部電極及び下部電極が汚れてしまう。そして、電極面が汚れると、その汚れが電気抵抗になって、るつぼを狭持したときに、るつぼに電流が流れにくくなり、測定試料などの加熱が不十分になって、分析用ガスの抽出性能が低下する等の問題がある。
【0004】
したがって、分析用ガスの抽出が終わると上部電極及び下部電極の清掃を行うことが必要である。
【0005】
そして従来、上部電極及び下部電極を清掃するものとして、特許文献2に示す自動清掃装置がある。
【0006】
この自動清掃装置は、上部電極を清掃する回転ブラシ及び下部電極を清掃する回転ブラシを有する清掃ユニットを、水平なガイドバーに沿ってエアシリンダにより直進移動させて、回転ブラシが上部電極及び下部電極に対向する対向位置と、当該対向位置から離間した退避位置との間を進退移動するようにしている。また、この自動清掃装置の清掃ユニットは、るつぼホルダ(使用済みるつぼ除去手段)を備えており、清掃ユニットが、対向位置に水平移動する途中で、そのるつぼホルダが下部電極上のるつぼを吸着することにより、るつぼを除去するようにしている。
【0007】
そして、清掃ユニットが対向位置に到達したときに、下部電極を上昇させることにより、清掃ユニットを上昇させて、各回転ブラシを各電極に圧接させた後に、回転ブラシを回転させて、電極を清掃するというものである。
【0008】
しかしながら、清掃ユニットを水平方向に直進移動するものであれば、対向位置と退避位置とが離れていれば離れているほどガイドバー及びエアシリンダが大きくなってしまい、自動洗浄機構が肥大化してしまい、元素分析装置も肥大化してしまうという問題がある。
【0009】
また、従来の元素分析装置では、下部電極上にピンセットなどでるつぼを載置させており、その作業が極めて面倒であり、分析の自動化を妨げる要因となっている。さらに、別途搬送ユニットを設けることも考えられるが、清掃ユニットの他に搬送ユニットを設けると、元素分析装置の製造コスト増及び肥大化は妨げられない。
【特許文献1】特許2949501号公報
【特許文献2】特公昭58−23886号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
そこで本発明は、上記問題点を一挙に解決するためになされたものであり、従来の清掃ユニットの駆動方式を変更するとともに、その清掃ユニットに搬送機能を付加して、下部電極へのるつぼの供給、下部電極からのるつぼの廃棄及び下部電極又は上部電極の清掃を簡単な機構により自動化するとともに、元素分析装置の小型化を可能にすることをその主たる所期課題とするものである。
【課題を解決するための手段】
【0011】
すなわち本発明に元素分析装置は、上部電極及び下部電極により、試料を収容するるつぼを狭持し、当該電極に電圧を印加することにより、前記るつぼを加熱して、それによって生じるガスから前記試料の元素を分析する元素分析装置であって、るつぼが設置されるるつぼ設置部から下部電極上にるつぼを搬送するとともに、前記上部電極又は下部電極を清掃する搬送・清掃ユニットを備え、前記搬送・清掃ユニットが、前記上部電極又は前記下部電極を清掃するための清掃体、及び前記るつぼ設置部に設置されたるつぼを把持する把持爪を備えたアーム部と、前記アーム部を回転軸により支持し、前記清掃体が上部電極又は下部電極と対向する対向位置、前記把持爪に把持されたるつぼを下部電極上に載置する載置位置、及び前記対向位置及び前記載置位置から離間した退避位置それぞれに前記アーム部を回転移動して停止させる回転駆動機構と、を備えることを特徴とする。
【0012】
このようなものであれば、上部電極又は下部電極を清掃するための清掃体及びるつぼを把持する把持爪を備えるアーム部を回転させて、対向位置、載置位置及び退避位置それぞれに移動させるようにしているので、るつぼの搬送、廃棄及び電極の清掃を簡単な機構により自動化することができ、また、元素分析装置を小型化することができる。
【0013】
搬送ユニットにより下部電極上にるつぼを載置する場合には、分析の度に同一の位置に載置してしまうと、るつぼを狭持する上部電極及び下部電極の同じ部分が摩耗してしまい、上部電極及び下部電極の寿命が短くなってしまうという問題がある。この問題を解決して、上部電極及び下部電極の長寿命化を可能にするためには、前記回転駆動機構が、下部電極上にるつぼを載置する毎に当該下部電極上におけるるつぼの位置が異なるように、前記アーム部を前記載置位置に移動させる毎に当該載置位置が異なるようにしていることが望ましい。
【発明の効果】
【0014】
このように本発明によれば、るつぼを下部電極上に搬送する搬送機構と下部電極を清掃する清掃ユニットを一体化し、下部電極へのるつぼの供給、下部電極からのるつぼの廃棄及び下部電極又は上部電極の清掃を、簡単な機構により自動化するとともに、元素分析装置の小型化及びコストダウンを可能にするができる。
【発明を実施するための最良の形態】
【0015】
次に、本発明の一実施形態について図面を参照して説明する。なお、図1は本実施形態の元素分析装置100の概略構成図、図2はるつぼ供給機構2の構成を示す模式的断面図、図3は元素分析装置の電極部分及び搬送・清掃ユニット3を主として示す断面図、図4は、アーム部の各停止位置を示す図、図5は退避位置R2を示す模式図、図6は把持位置R3を示す図、図7は載置位置R4を示す図、図8は廃棄位置R5を示す図、図9は対向位置R1を示す図、図10は清掃段階を示す図である。
【0016】
<装置構成>
【0017】
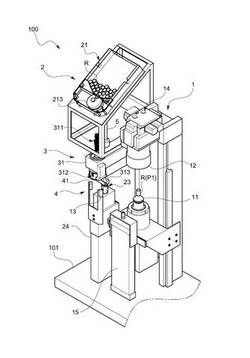
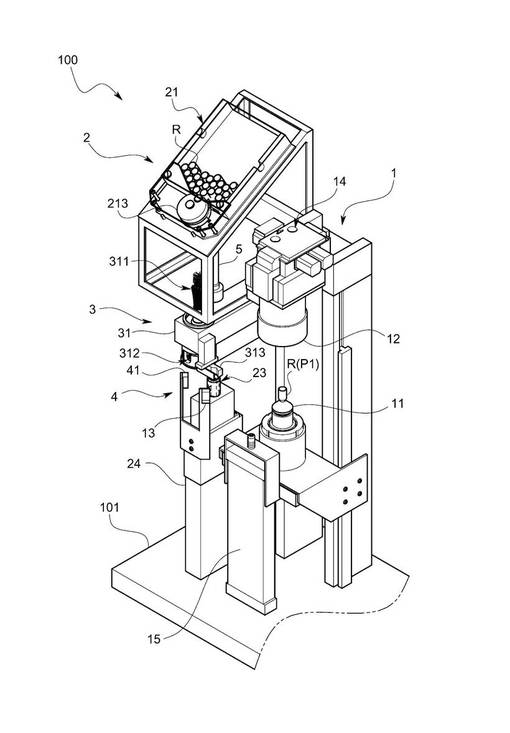
本実施形態に係る元素分析装置100は、るつぼR内に収容された金属試料(以下、単に試料とも言う)を加熱溶解し、その際に発生するガス成分を分析することによって、当該試料中に含まれている元素を測定するもので、分析装置本体1と、当該分析装置本体に搬送されるるつぼを供給するるつぼ供給機構2と、当該るつぼ供給機構2により供給されたるつぼを前記分析装置本体1に搬送するとともに、前記分析装置本体1を清掃する搬送・清掃ユニット3と、を備えている。以下それぞれについて説明する。
【0018】
<<分析装置本体1>>
【0019】
分析装置本体1から説明すると、この分析装置本体1の正面には、図1に示すように、上部電極12及び下部電極11が上下に離間させて設けられており、下部電極11上に、試料を収容したるつぼRを載置できるように構成してある。この図1に示す下降位置にある下部電極11上に載置されたるつぼ位置が加熱位置P1である。なお、図1中、符号13は下部電極11上におけるるつぼの有無を検知する検知センサ(例えば光電センサ)である。また、るつぼRは、上部が開口した円筒状をなす黒鉛を素材としたもので、下端部は先細りのテーパ形状をなしている。なお、るつぼRは、下端部が先細りテーパ形状をなすものの他、下端部の外周に環状凹溝が形成されたものであっても良い。
【0020】
そして分析時は、加熱位置P1に置かれたるつぼRに対して、下部電極11が上方にスライドし、上部電極12との間でるつぼRを挟み込む。この状態で、上部電極12の上方に設けられた試料投入部14から、るつぼR内に試料を投入されると、その後、電極11、12間に電流が印加され、るつぼRが発熱して内部の試料が加熱融解される。融解した試料から発生したガスは、図示しない分析部に送られて成分が測定され、その結果から、試料に元々含まれていた元素が分析される。
【0021】
例えば、試料中の酸素量を測定する場合には、試料の融解によって反応生成物であるCO(一酸化炭素)を発生させ、COを例えば分析部を構成する非分散形赤外線検出器を用いて測定し、そのCO値に基づいて当該試料中に存在していた酸素量を測定・算出する。その他、反応生成物とそれに応じた分析部を設定することにより、水素窒素などの成分も測定することができる。なお、分析後は、使用したるつぼRは、るつぼ搬送機構2により試料と共に廃棄処分される。
【0022】
<<るつぼ供給機構2>>
【0023】
るつぼ供給機構2は、後述する搬送・清掃ユニット3により搬送されるるつぼRを自動的に供給するものであり、特に図2に示すように、複数のるつぼRを収容可能なるつぼ収容部21と、るつぼ収容部21からるつぼRを自重により落下させる案内路22と、案内路22の導出口22bに設けられ、落下したるつぼRを受け取るるつぼ設置部23と、を備えている。
【0024】
るつぼ収容部21は、複数のるつぼRが並列に載置される傾斜面211と、当該傾斜面211の下方に設けられた排出口212と、傾斜面211の下方に滑下したるつぼRを保持して前記排出口212に移動させるるつぼ排出機構213とを備えている。るつぼ排出機構213としては、例えば、側面にるつぼRを収容する凹部を有し、一軸周りに回転する回転体(図1参照)と、当該回転体を回転させる駆動部(図示しない)とからなり、前記凹部に収容されたるつぼRを回転することにより、排出口212に移動させるものが考えられる。そして、るつぼ排出機構213により、排出口212上部に移動されたるつぼRは自重により、排出口212から落下して排出される。これならば、るつぼRを並列に収容しているので、るつぼRを可及的に多く収容することができる。またるつぼRの自重を用いて排出するようにしているので排出機構213の構造を簡単にすることができる。
【0025】
案内路22は、るつぼRを略鉛直方向に落下させて、るつぼ設置部23に案内するものであり、図2に示すように、るつぼ収容部21の供給口214に連通して、略鉛直に形成されている。
【0026】
また、案内路22は、るつぼ収容部21から導入されたるつぼRを上下正向きの状態のまま落下させるものであり、るつぼRが落下する際に上下反転しない内径、例えば、るつぼRの最長の対角線の長さ寸法よりも小さい内径である。
【0027】
案内管5の側壁には、供給口214から導入されたるつぼR以外の異物(例えばるつぼRの破片等)を出口(導出口22b)に到達させること無く案内管5の外部に排出するための、例えばスリット状の貫通孔5Aが1又は複数個設けられている。具体的には、案内管5中、傾斜面211に略垂直に設けられた屈曲部51の側壁下方に貫通孔5Aが設けられている。これにより、破片は自重により貫通孔5Aを通って案内管5外に排出される。また、この貫通孔5Aにより、案内路22におけるるつぼRの詰まりを確認することもできる。
【0028】
また、案内路22の出口近傍には、るつぼRの落下速度を低下させるためのテーパ部221が形成されている。このテーパ部221の最小径は、るつぼRの外径よりも若干大きく、るつぼRが通過可能なものである。また案内路22におけるテーパ部221の下流側は、テーパ部221の最小径と同一径を有する。これならば、案内路22の出口近傍におけるるつぼRの落下速度を小さくすることができ、るつぼ設置部23に着地する際のるつぼRの損傷を防止することができる。また、るつぼ設置部23での設置位置の位置ずれを防止することができ、精度良く設置することができる。
【0029】
るつぼ設置部23は、図1及び図2に示すように、基台101に設けられたエアシリンダ等からなる設置部昇降機構24の駆動軸241の先端部に設けられている。そして、るつぼ設置部23は、案内路22に接続されて、落下したるつぼRを受け取る受取位置Q1と、当該受取位置Q1から鉛直下方に離間した離間位置であるるつぼ搬送位置Q2との間を昇降移動するものである。
【0030】
具体的にるつぼ設置部23は、図2に示すように、るつぼRを収容可能な凹部231xを有し、るつぼRを受け取るるつぼ受け本体231と、当該るつぼ受け本体231の凹部231x内に設けられた載置突起232とを備えている。
【0031】
るつぼ受け本体231は、概略有底円筒形状をなし、内部を視認可能な透明樹脂から形成されており、その凹部231xの内径は、るつぼRの外径よりも大きい。また、るつぼ受け本体231の上端部外周面には、テーパ面231tが形成されている。そして、るつぼ設置部23がるつぼ搬送位置Q2から受取位置Q1に移動するにつれて、前記案内路22を形成する案内管5の出口側端面に設けられたテーパ面5tと嵌ることにより、るつぼ受け本体231及び載置突起232と案内路22との位置決めを行う位置決め機能を発揮する(図2参照)。
【0032】
載置突起232は、概略円柱形状をなすものであり、その直径がるつぼRの開口径よりも若干小さく設定されている。そして、載置突起232は、るつぼ受け本体231の凹部231x内において同軸上に設けられ、るつぼRが上下正向きに設置された場合には、その略水平な上面232aにるつぼRが載置される。一方、載置突起232は、るつぼRが上下逆向きに設置された場合には、るつぼR内に収容される。この構成により、るつぼRを上下正向きに設置した場合と、るつぼRを上下逆向きに設置した場合とで、るつぼ設置部23におけるるつぼRの高さ位置が異なる。
【0033】
また、載置突起232の長さは、用いられる種々のるつぼRにおいて、いずれの深さ寸法よりも長くして、るつぼRのサイズを問わない構造としている。つまり、載置突起232の長さは、上下逆向きに設置した場合に、るつぼRの開口が凹部底面に接触しない長さである。つまり、載置突起232の長さは、上下逆向きに設置した場合に、凹部底面と、るつぼRの開口端面との間に空間が形成されるように設定されている。これにより、るつぼRの破片等の異物が凹部231xに蓄積されている場合であっても、るつぼ受け本体231は、上下逆向きにるつぼRを収容することができる。
【0034】
さらにこのるつぼ供給機構2は、図1及び図2に示すように、るつぼ検知センサ41を備え、前記るつぼ設置部23とともに反転検出機構4を構成する。
【0035】
るつぼ検知センサ41は、載置突起232にるつぼRが上下正向きに設置された場合にのみるつぼRを検出する、光を利用したものである。具体的には、光電センサを用いており、光電センサ41の発光部を出て受光部に到達する光L1の軌道が、るつぼ設置部23に上下正向きに設置されたるつぼRの外周面で反射して受光部に到達するように構成されている。
【0036】
このような構成により、るつぼRを上下正向きに設置した場合には、発光部から出た光L1は、るつぼRの側面により反射されて受光部により受光される。一方、るつぼRを上下逆向きに設置した場合には、発光部から出た光L1は、るつぼRの外側周面により反射されることなく、受光部により受光されない。以上により、るつぼ設置部23にるつぼRが設置されていない場合、設置されていても上下逆向きに設置されている場合には、受光部が光L1を受光しないことから、るつぼRの有無及びるつぼRの反転を検知できる。また、受光部の検知信号は、図示しない報知手段に出力され、警報音等でオペレータに報知するようにしている。なお、るつぼ検知センサ41は、上述した反射型のものに限られず、透過型のものでもよいし、超音波を利用したもの等を用いても構わない。
【0037】
<<搬送・清掃ユニット3>>
【0038】
搬送・清掃ユニット3は、るつぼRが設置されるるつぼ設置部23から下部電極11上にるつぼRを搬送して載置、又は下部電極11上のるつぼRを廃棄ボックス7に搬送して廃棄するとともに、上部電極12及び下部電極11を清掃するものである。
【0039】
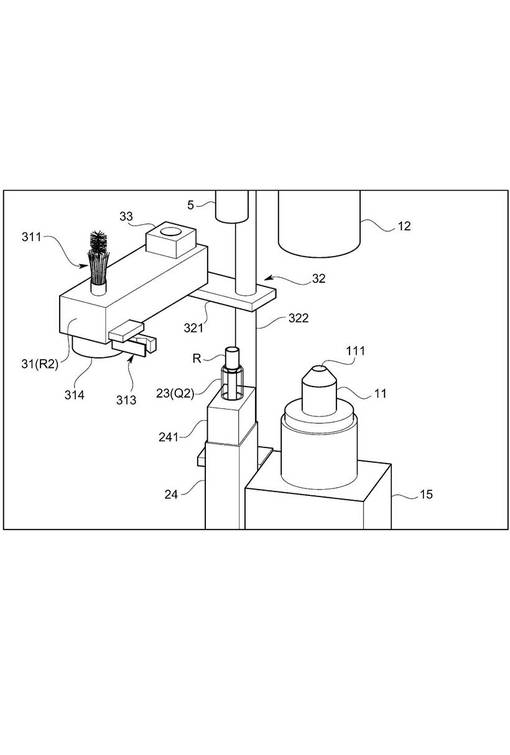
具体的にこのものは、第1清掃体311、第2清掃体312、及び把持部である把持爪313を有するアーム部31と、このアーム部31を回転軸322により支持し、当該回転軸322を回転させることにより、アーム部31を回転軸322周りに回転させる回転駆動機構32とを、備えている。
【0040】
アーム部31は、基端部が後述する回転駆動機構32の回転軸322に連結され、その先端部の上部電極12側に第1清掃体311を保持し、下部電極11側に第2清掃体312を保持する。また、アーム部31の下部電極11への進行方向を向く側面には、るつぼRを把持する把持爪313が設けられている。
【0041】
第1清掃体311(上部電極清掃体)は、図3に示すように、上部電極12を清掃するものであり、本実施形態では回転ブラシである。具体的には、第1清掃体311は、上部電極12の電極面121を清掃するため第1電極面ブラシ311aと、上部電極12の試料通過孔12aを清掃するための通過孔ブラシ311bと、それらブラシ311a、311bを保持する第1基体311cとからなる。
【0042】
第1電極面ブラシ311aは、例えばステンレス製のブラシ毛からなり、通過孔ブラシ311bは、例えばナイロン製のブラシ毛からなる。また、通過孔ブラシ311bは、電極面ブラシ311aよりも先端側に設けられている。第1基体311cは、後述する清掃体回転機構6の第1駆動軸64に固定される。
【0043】
第2清掃体312(下部電極清掃体)は、図3に示すように、下部電極11を清掃するものであり、前記第1清掃体311と同様、回転ブラシである。具体的には、第2清掃体312は、下部電極11の電極面111を清掃する第2電極面ブラシ312aと、下部電極11の電極面111の周辺部を清掃するための周辺部ブラシ312bと、それらブラシを保持する第2基体312cとからなる。
【0044】
第2電極面ブラシ312aは、例えばステンレス製のブラシ毛からなり、周辺部ブラシ312bは、例えばナイロン製のブラシ毛からなる。なお、第2電極面ブラシ312aの外側に周辺部ブラシ312bが設けられている。第2基体312cは、後述する清掃体回転機構6の第2駆動軸65に固定される。
【0045】
把持爪313は、少なくとも一方が例えば概略くの字形をなすものである。各把持爪313は、エアチャック機構を用いたものであり、基端部においてアーム部31にスライド駆動可能に保持されており、別に設けた制御機器(図示しない)からの指令で把持爪313間の距離を縮めるようにスライドさせることによって、各把持爪313の中央部分間で前記るつぼRの側周面を狭圧把持できるように構成されている。
【0046】
また、アーム部31は、内部に吸気通路31Aを有する(図3参照)。この吸気通路31Aは、アーム部31基端側上面に形成された接続口と、アーム部31先端側上面に形成された上部電極側開口及びアーム部31先端側下面に設けられた下部電極側開口とを連通するものである。上部電極側開口は、第1駆動軸64と同心円上となるように形成されている。
【0047】
さらに、アーム部31基端側上面には、接続口と連通するように、弾性材料からなる中空の連結体33が設けられている。そして、対向位置R1にあるアーム部31が上昇したときに、連結体33が、基台101の枠体102に設けられた吸引口102Aと連結するようにしている。吸引口102Aは、装置1の外部に設けられた吸引装置(図示しない)に接続されている。対向位置R1におけるアーム部31の昇降移動は、前述した設置部昇降機構24により行われる。アーム部31は、対向位置R1において、設置部昇降機構24の駆動軸241の先端と接触する接触片31xを有している。この接触片31xは、概略L字形状をなすものであり、アーム部の側面に設けられている。なお、設置部昇降機構24の駆動軸241がアーム部31の底面に接触して、アーム部31を持ち上げるように構成しても良い。
【0048】
さらに、アーム部31において、上部電極側開口の開口縁には、上部電極12の下面と接触するシール部材34が設けられている。下部電極側開口は、第2清掃体312の周囲に立設された側壁により形成されている。この側壁314は、アーム部31が上部電極12及び下部電極11により狭持されたときの、下部電極11と第2清掃体312との距離、つまり下部電極11の電極面111に対する第2清掃体312の高さを調節するものである。
【0049】
また、アーム部31には、第1清掃体311及び第2清掃体312を回転するための清掃体回転機構6が設けられている。この清掃体回転機構6は、図3に示すように、アーム部31の基端側下面に固定されたモータ等のアクチュエータ61と、アクチュエータ61の駆動軸に固定された第1プーリ62と、アーム部31の先端側に設けられた第2プーリ63と、当該第1プーリ62の回転駆動を第2プーリ63に伝達する伝達ベルト63と、第2プーリ63の上面に設けられ、第1清掃体311の第1基体311cに連結される第1駆動軸64と、第2プーリ63の下面に設けられ、第2清掃体312の第2基体312cに連結される第2駆動軸65とからなる。なお、アクチュエータ61は、前記制御機器により制御される。
【0050】
回転駆動機構32は、図3に示すように、回転軸322によりアーム部31を昇降自在に支持して、アーム部31を回転させるものであり、各清掃体311、312が各電極11、12に対向する対向位置R1及びその対向位置R1から離間した退避位置R2の間で、アーム部31を回転移動させるものである。また、回転駆動機構32は、対向位置R1及び退避位置R2の間における複数の回転位置でアーム部31を停止可能なものである。
【0051】
回転駆動機構32の具体的な構成は、アーム部31が固定される固定部321と、その固定部321に設けられた貫通孔に相対回転不能且つ軸方向にスライド可能に挿通された回転軸322と、当該回転軸322の下端部に連結され、当該回転軸322を回転させるアクチュエータ323とからなる。これらは、ブラケット324により装置本体11に固定される。アクチュエータ323は、ステッピングモータであり、図示しない制御機器からの駆動パルスにより制御される。
【0052】
このような駆動昇降機構32により、アクチュエータ323により回転軸322を回転させると、回転軸322と相対回転不能なアーム部31も回転する。これにより、アーム部31は、回転軸322を回転中心として、対向位置R1と退避位置R2との間を回転移動する。
【0053】
また、回転軸322と固定部321とは軸方向にスライド可能であり、アーム部31が設置部昇降機構24により押し上げられるに従って、アーム部31は回転軸322をスライドして上昇する。
【0054】
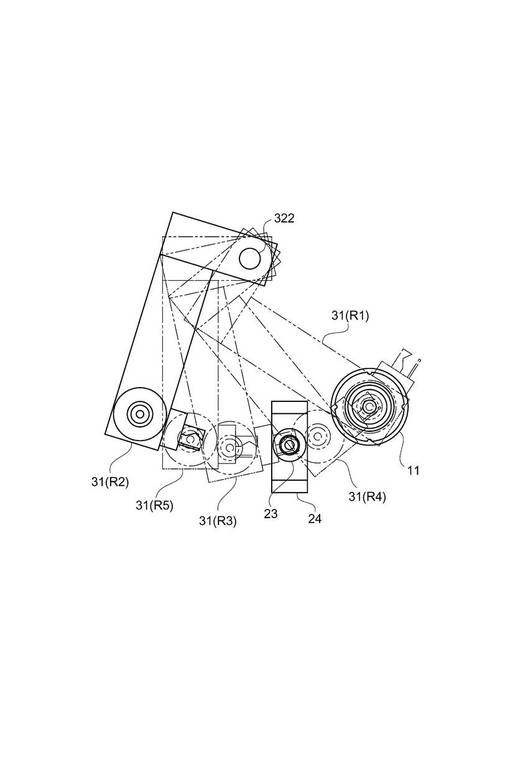
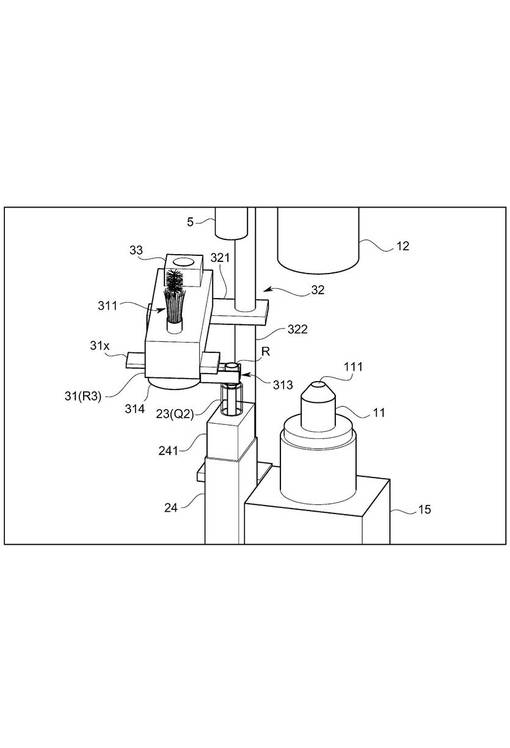
具体的に回転駆動機構32は、図4に示すように、各清掃体311、312が各電極11、12に対向する対向位置R1、るつぼ設置部23上のるつぼRを把持する把持位置R3、把持爪313に把持されたるつぼRを下部電極11上に載置する載置位置R4、把持爪313に把持されたるつぼRを廃棄ボックス7に廃棄する廃棄位置R5、前記各位置から離間した退避位置R2でアーム部31を停止可能である。なお、退避位置R2は、各停止位置R1、R3〜R5に対して、下部電極11及びるつぼ設置部23よりも外方に位置している。
【0055】
また、本実施形態の搬送・清掃ユニット3はアーム部昇降機構(図示しない)を備えている。このアーム部昇降機構は、アーム部31が把持位置R3にある状態において、把持爪313がるつぼ設置部23上にあるるつぼRを把持したときに、アーム部31を鉛直上方に持ち上げる機能を発揮するものである。具体的にアーム部昇降機構は、アーム部31の下面に当接し、昇降移動する駆動軸と、当該駆動軸を昇降移動させるエアシリンダとからなる。このエアシリンダは、前記制御機器により制御される。これならば、るつぼ設置部23のるつぼ受け本体231に収容されているるつぼRを持ち上げて取り出すことができる。
【0056】
<<搬送・清掃ユニット3の動作>>
【0057】
次に、このように構成した搬送・清掃ユニット3の動作について説明する。
【0058】
るつぼ供給段階において、るつぼ供給機構2のるつぼ設置部23が、受取位置Q1まで上昇して、るつぼ収容部21から案内路22に落下するるつぼRを受け取り、搬送位置Q2に下降する。このとき、搬送・清掃ユニット3のアーム部31は退避位置R2にある(図4及び図5参照)。
【0059】
そして、るつぼ搬送段階において、搬送・清掃ユニット3は、回転駆動機構32により、退避位置R2にあるアーム部31を把持位置R3まで回転移動する(図4及び図6参照)。このとき、アーム部31の側面に設けられた把持爪313がるつぼ設置部23に設置されたるつぼRを把持する。その後、アーム部昇降機構により、アーム部31が若干持ち上げられる。このとき持ち上げる量は、るつぼRがるつぼ設置部23のるつぼ受け本体241から出る程度である。
【0060】
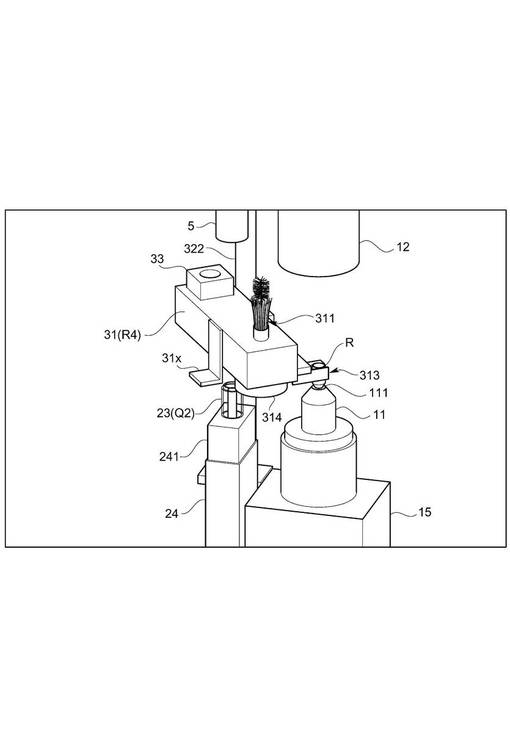
次に、回転駆動機構32により、アーム部31は把持位置R3から載置位置R4まで回転移動する(図4及び図7参照)。なお、この回転移動の最中において、アーム部昇降機構によりアーム部31は、若干持ち上げられた状態のままである。
【0061】
そして、アーム部31が載置位置R4に到達して、るつぼRを下部電極11上に載置する際に、アーム部昇降機構はアーム部31を下降させる。このとき、アーム部31を下降させて、把持爪313が把持しているるつぼRの底面が、下部電極11の電極面111と面接触した状態で、把持爪313がるつぼRを放す。これにより、るつぼRは、下部電極11上に押し付けられるように載置され、仮に把持爪313がるつぼRを斜めに把持している場合であっても、下部電極11に押さえ付けられる過程で、るつぼRの下面が下部電極11の電極面111に接触して向きを変えるので、るつぼRを下部電極11上に安定して載置することができ、またるつぼRを上方から落下させて下部電極11上で跳ね返ってしまうことを防止できる。
【0062】
下部電極11上にるつぼRを載置後、アーム部31は回転駆動機構32により退避位置R2に回転移動する(図4参照)。
【0063】
その後、分析段階において、下部電極11が上昇して、上部電極12との間でるつぼRを狭持し、試料が投入されて、当該試料の分析が行われる。分析終了後、下部電極11は下降して下降位置に戻る。
【0064】
次に、るつぼ廃棄段階において、アーム部31は、回転駆動機構32より、退避位置R2から載置位置R4まで回転移動する(図4及び図7参照)。そして、把持爪313により下部電極11上にあるるつぼRを把持する。
【0065】
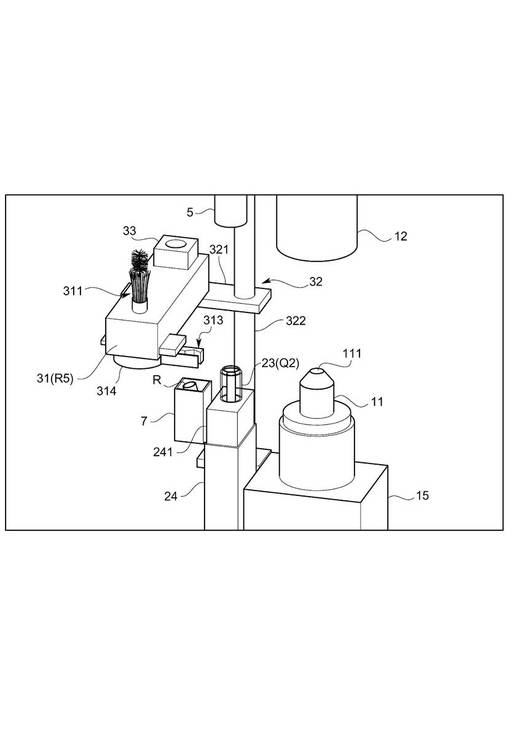
下部電極11上のるつぼRを把持したアーム部31は、回転駆動機構32により廃棄位置R5に回転移動して、当該廃棄位置R5でるつぼRを放し、廃棄位置R5の下方に設けられた廃棄ボックス7にるつぼRを落とす(図4及び図8参照)。
【0066】
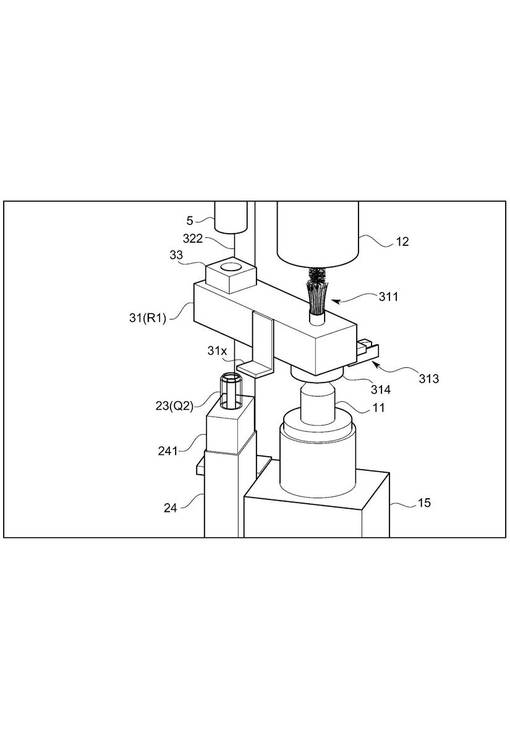
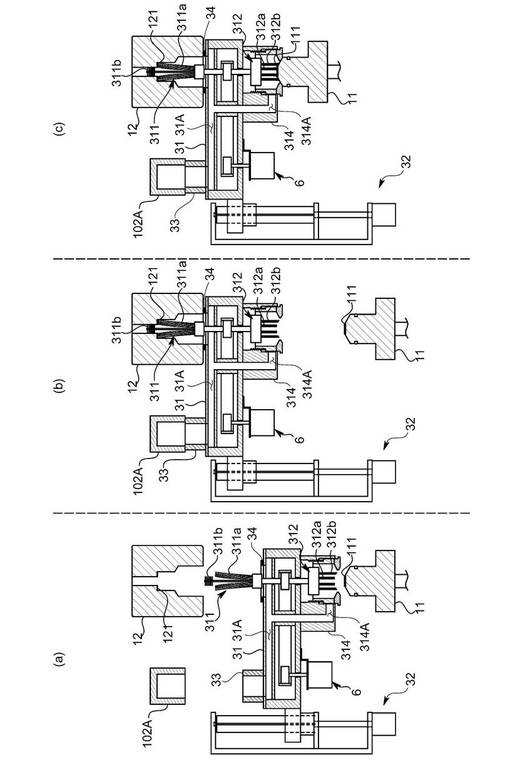
その後、電極清掃段階において、アーム部31は、回転駆動機構32により、廃棄位置R5から対向位置R1まで回転移動する(図4、図9及び図10(a)参照)。このとき、第1清掃体311及び第2清掃体312は、清掃体回転機構6より回転する。
【0067】
そうすると、設置部昇降機構24の駆動軸241の先端が接触片31xに接触して、アーム部31を持ち上げる。このとき、アーム部31の先端側上面に設けたシール部材34が、上部電極12の下面に接触する(図10(b))。また、第1清掃体311のブラシ311a、311bは、上部電極12の電極面121及び試料通過孔12aに押圧接触した状態である。さらに、連結体33は、基台101の枠体102に設けられた吸引口102Aに接続される。
【0068】
このとき、上部電極12に生じるダストは、上部電極12側開口から吸引されて、アーム部31の吸気通路31Aを通り吸引口102Aから外部に排出される。
【0069】
次に、下部電極昇降機構15により、下部電極11が上昇する。このとき、下部電極11の電極面111の周辺部は、第2清掃体312の周囲に設けられた側壁314に接触する(図10(c))また、第2清掃体312のブラシ312a、312bは、下部電極11の電極面111及びその周辺部に押圧接触した状態である。
【0070】
このとき、下部電極11に生じるダストは、側壁314に設けられた吸気路314A及びアーム部31の吸気通路31Aを通り吸引口102Aから外部に排出される。
【0071】
清掃後、下部電極11を下降させた後、設置部昇降機構24により、アーム部31は対向位置R1まで下降し、さらに回転駆動機構32により、退避位置R2に回転移動する。そして、連続して複数の試料を分析する場合には、再び、るつぼ供給段階に移行する。
【0072】
以上の搬送・清掃ユニット3の動作において、本実施形態では、回転駆動機構32が、把持爪313によりるつぼRを把持したアーム部31を、下部電極11上にるつぼRを載置するために載置位置R4に移動させる毎に、当該載置位置R4が下部電極11上で異なるようにしている。つまり、下部電極11上にるつぼRを載置する位置を分析毎に異なるようにしている。例えば分析毎に、下部電極11上にるつぼRを載置する位置を0.5mm程度変化させている。
【0073】
具体的には、制御機器が、回転駆動機構32のアクチュエータ323であるステッピングモータに出力する駆動パルスを、下部電極11上にるつぼRを載置するためにアーム部31を載置位置R4に回転移動させる毎に、異なるように設定している。より詳細には、各分析において、把持爪313によりるつぼRを把持したアーム部31を載置位置R4に移動させる毎に、駆動パルスのパルス量を数パルスだけ異ならせてランダムに設定している。これならば、下部電極11及び上部電極12が同一部分のみ摩耗してしまうという問題を解決することができ、下部電極11及び上部電極12の長寿命化を可能にすることができる。
【0074】
<本実施形態の効果>
【0075】
このように構成した本実施形態に係る元素分析装置100によれば、上部電極12及び下部電極11を清掃するための清掃体311、312及びるつぼRを把持する把持爪313を備えるアーム部31を回転させて、対向位置R1、把持位置R3、載置位置R4、廃棄位置R5及び退避位置R2それぞれに移動させるようにしているので、るつぼの搬送、廃棄及び電極の清掃を簡単な構成である1つの機構により自動化することができ、また、元素分析装置100を小型化することができる。
【0076】
さらに回転駆動機構32のアクチュエータ323としてステッピングモータを用いているので、アーム部31の各停止位置の増減、各停止位置の微調整等を容易に行うことができ、元素分析装置100のメンテナンス性を向上させることができ、また、元素分析装置100の使いやすさ及びるつぼRの載置位置R4等の位置精度を向上させることができる。
【0077】
<その他の変形実施形態>
【0078】
なお、本発明は前記実施形態に限られるものではない。以下の説明において前記実施形態に対応する部材には同一の符号を付すこととする。
【0079】
例えば、回転駆動機構のアクチュエータとしては、ステッピングモータの他に、サーボモータや回転エアシリンダ等の複数の回転位置で停止可能なアクチュエータを用いることができる。また、回転駆動機構は、直動式のエアシリンダの往復運動を回転運動に変換して、回転軸を回転させる構成でも良い。
【0080】
前記実施形態では、対向位置にあるアーム部は、設置部昇降機構により昇降移動するものであったが、設置部昇降機構とは異なる専用の昇降機構を設けても良い。
【0081】
その他、前述した実施形態や変形実施形態の一部又は全部を適宜組み合わせてよいし、本発明は前記実施形態に限られず、その趣旨を逸脱しない範囲で種々の変形が可能であることは言うまでもない。
【図面の簡単な説明】
【0082】
【図1】本発明の一実施形態に係る元素分析装置の模式的構成図。
【図2】るつぼ供給機構の模式的構成図。
【図3】電極部分及び搬送・清掃ユニットを主として示す断面図。
【図4】アーム部の各停止位置を示す図。
【図5】アーム部の退避位置R2を示す模式図。
【図6】アーム部の把持位置R3を示す模式図。
【図7】アーム部の載置位置R4を示す模式図。
【図8】アーム部の廃棄位置R5を示す模式図。
【図9】アーム部の対向位置R1を示す模式図。
【図10】清掃段階を示す模式図。
【符号の説明】
【0083】
100 ・・・元素分析装置
R ・・・るつぼ
12 ・・・上部電極
11 ・・・下部電極
23 ・・・るつぼ設置部
3 ・・・搬送・清掃ユニット
31 ・・・アーム部
311、312・・・清掃体(第1清掃体、第2清掃体)
313 ・・・把持部
32 ・・・回転駆動機構
322 ・・・回転軸
R1 ・・・対向位置
R2 ・・・退避位置
R4 ・・・載置位置
【技術分野】
【0001】
本発明は、例えば鉄鋼や非鉄金属、セラミックスなどの測定試料中に含まれる窒素(N)、水素(H)、酸素(O)等の元素を分析する元素分析装置に関し、特に元素分析装置に用いられる上部電極及び下部電極を清掃するための清掃ユニット及び下部電極上にるつぼを搬送する搬送ユニットに関するものである。
【背景技術】
【0002】
この種の元素分析装置は、例えば特許文献1に示すように、上部電極及び下部電極に狭持されたるつぼに測定試料を収容して、電圧を印加することにより、るつぼ内の測定試料を加熱溶解して、それによって生じたガスを分析して前記測定試料の元素を分析している。
【0003】
このように、上部電極及び下部電極は黒鉛るつぼと接触しており、また、溶解した測定試料、フラックス等の一部が飛散して付着することから、上部電極及び下部電極が汚れてしまう。そして、電極面が汚れると、その汚れが電気抵抗になって、るつぼを狭持したときに、るつぼに電流が流れにくくなり、測定試料などの加熱が不十分になって、分析用ガスの抽出性能が低下する等の問題がある。
【0004】
したがって、分析用ガスの抽出が終わると上部電極及び下部電極の清掃を行うことが必要である。
【0005】
そして従来、上部電極及び下部電極を清掃するものとして、特許文献2に示す自動清掃装置がある。
【0006】
この自動清掃装置は、上部電極を清掃する回転ブラシ及び下部電極を清掃する回転ブラシを有する清掃ユニットを、水平なガイドバーに沿ってエアシリンダにより直進移動させて、回転ブラシが上部電極及び下部電極に対向する対向位置と、当該対向位置から離間した退避位置との間を進退移動するようにしている。また、この自動清掃装置の清掃ユニットは、るつぼホルダ(使用済みるつぼ除去手段)を備えており、清掃ユニットが、対向位置に水平移動する途中で、そのるつぼホルダが下部電極上のるつぼを吸着することにより、るつぼを除去するようにしている。
【0007】
そして、清掃ユニットが対向位置に到達したときに、下部電極を上昇させることにより、清掃ユニットを上昇させて、各回転ブラシを各電極に圧接させた後に、回転ブラシを回転させて、電極を清掃するというものである。
【0008】
しかしながら、清掃ユニットを水平方向に直進移動するものであれば、対向位置と退避位置とが離れていれば離れているほどガイドバー及びエアシリンダが大きくなってしまい、自動洗浄機構が肥大化してしまい、元素分析装置も肥大化してしまうという問題がある。
【0009】
また、従来の元素分析装置では、下部電極上にピンセットなどでるつぼを載置させており、その作業が極めて面倒であり、分析の自動化を妨げる要因となっている。さらに、別途搬送ユニットを設けることも考えられるが、清掃ユニットの他に搬送ユニットを設けると、元素分析装置の製造コスト増及び肥大化は妨げられない。
【特許文献1】特許2949501号公報
【特許文献2】特公昭58−23886号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
そこで本発明は、上記問題点を一挙に解決するためになされたものであり、従来の清掃ユニットの駆動方式を変更するとともに、その清掃ユニットに搬送機能を付加して、下部電極へのるつぼの供給、下部電極からのるつぼの廃棄及び下部電極又は上部電極の清掃を簡単な機構により自動化するとともに、元素分析装置の小型化を可能にすることをその主たる所期課題とするものである。
【課題を解決するための手段】
【0011】
すなわち本発明に元素分析装置は、上部電極及び下部電極により、試料を収容するるつぼを狭持し、当該電極に電圧を印加することにより、前記るつぼを加熱して、それによって生じるガスから前記試料の元素を分析する元素分析装置であって、るつぼが設置されるるつぼ設置部から下部電極上にるつぼを搬送するとともに、前記上部電極又は下部電極を清掃する搬送・清掃ユニットを備え、前記搬送・清掃ユニットが、前記上部電極又は前記下部電極を清掃するための清掃体、及び前記るつぼ設置部に設置されたるつぼを把持する把持爪を備えたアーム部と、前記アーム部を回転軸により支持し、前記清掃体が上部電極又は下部電極と対向する対向位置、前記把持爪に把持されたるつぼを下部電極上に載置する載置位置、及び前記対向位置及び前記載置位置から離間した退避位置それぞれに前記アーム部を回転移動して停止させる回転駆動機構と、を備えることを特徴とする。
【0012】
このようなものであれば、上部電極又は下部電極を清掃するための清掃体及びるつぼを把持する把持爪を備えるアーム部を回転させて、対向位置、載置位置及び退避位置それぞれに移動させるようにしているので、るつぼの搬送、廃棄及び電極の清掃を簡単な機構により自動化することができ、また、元素分析装置を小型化することができる。
【0013】
搬送ユニットにより下部電極上にるつぼを載置する場合には、分析の度に同一の位置に載置してしまうと、るつぼを狭持する上部電極及び下部電極の同じ部分が摩耗してしまい、上部電極及び下部電極の寿命が短くなってしまうという問題がある。この問題を解決して、上部電極及び下部電極の長寿命化を可能にするためには、前記回転駆動機構が、下部電極上にるつぼを載置する毎に当該下部電極上におけるるつぼの位置が異なるように、前記アーム部を前記載置位置に移動させる毎に当該載置位置が異なるようにしていることが望ましい。
【発明の効果】
【0014】
このように本発明によれば、るつぼを下部電極上に搬送する搬送機構と下部電極を清掃する清掃ユニットを一体化し、下部電極へのるつぼの供給、下部電極からのるつぼの廃棄及び下部電極又は上部電極の清掃を、簡単な機構により自動化するとともに、元素分析装置の小型化及びコストダウンを可能にするができる。
【発明を実施するための最良の形態】
【0015】
次に、本発明の一実施形態について図面を参照して説明する。なお、図1は本実施形態の元素分析装置100の概略構成図、図2はるつぼ供給機構2の構成を示す模式的断面図、図3は元素分析装置の電極部分及び搬送・清掃ユニット3を主として示す断面図、図4は、アーム部の各停止位置を示す図、図5は退避位置R2を示す模式図、図6は把持位置R3を示す図、図7は載置位置R4を示す図、図8は廃棄位置R5を示す図、図9は対向位置R1を示す図、図10は清掃段階を示す図である。
【0016】
<装置構成>
【0017】
本実施形態に係る元素分析装置100は、るつぼR内に収容された金属試料(以下、単に試料とも言う)を加熱溶解し、その際に発生するガス成分を分析することによって、当該試料中に含まれている元素を測定するもので、分析装置本体1と、当該分析装置本体に搬送されるるつぼを供給するるつぼ供給機構2と、当該るつぼ供給機構2により供給されたるつぼを前記分析装置本体1に搬送するとともに、前記分析装置本体1を清掃する搬送・清掃ユニット3と、を備えている。以下それぞれについて説明する。
【0018】
<<分析装置本体1>>
【0019】
分析装置本体1から説明すると、この分析装置本体1の正面には、図1に示すように、上部電極12及び下部電極11が上下に離間させて設けられており、下部電極11上に、試料を収容したるつぼRを載置できるように構成してある。この図1に示す下降位置にある下部電極11上に載置されたるつぼ位置が加熱位置P1である。なお、図1中、符号13は下部電極11上におけるるつぼの有無を検知する検知センサ(例えば光電センサ)である。また、るつぼRは、上部が開口した円筒状をなす黒鉛を素材としたもので、下端部は先細りのテーパ形状をなしている。なお、るつぼRは、下端部が先細りテーパ形状をなすものの他、下端部の外周に環状凹溝が形成されたものであっても良い。
【0020】
そして分析時は、加熱位置P1に置かれたるつぼRに対して、下部電極11が上方にスライドし、上部電極12との間でるつぼRを挟み込む。この状態で、上部電極12の上方に設けられた試料投入部14から、るつぼR内に試料を投入されると、その後、電極11、12間に電流が印加され、るつぼRが発熱して内部の試料が加熱融解される。融解した試料から発生したガスは、図示しない分析部に送られて成分が測定され、その結果から、試料に元々含まれていた元素が分析される。
【0021】
例えば、試料中の酸素量を測定する場合には、試料の融解によって反応生成物であるCO(一酸化炭素)を発生させ、COを例えば分析部を構成する非分散形赤外線検出器を用いて測定し、そのCO値に基づいて当該試料中に存在していた酸素量を測定・算出する。その他、反応生成物とそれに応じた分析部を設定することにより、水素窒素などの成分も測定することができる。なお、分析後は、使用したるつぼRは、るつぼ搬送機構2により試料と共に廃棄処分される。
【0022】
<<るつぼ供給機構2>>
【0023】
るつぼ供給機構2は、後述する搬送・清掃ユニット3により搬送されるるつぼRを自動的に供給するものであり、特に図2に示すように、複数のるつぼRを収容可能なるつぼ収容部21と、るつぼ収容部21からるつぼRを自重により落下させる案内路22と、案内路22の導出口22bに設けられ、落下したるつぼRを受け取るるつぼ設置部23と、を備えている。
【0024】
るつぼ収容部21は、複数のるつぼRが並列に載置される傾斜面211と、当該傾斜面211の下方に設けられた排出口212と、傾斜面211の下方に滑下したるつぼRを保持して前記排出口212に移動させるるつぼ排出機構213とを備えている。るつぼ排出機構213としては、例えば、側面にるつぼRを収容する凹部を有し、一軸周りに回転する回転体(図1参照)と、当該回転体を回転させる駆動部(図示しない)とからなり、前記凹部に収容されたるつぼRを回転することにより、排出口212に移動させるものが考えられる。そして、るつぼ排出機構213により、排出口212上部に移動されたるつぼRは自重により、排出口212から落下して排出される。これならば、るつぼRを並列に収容しているので、るつぼRを可及的に多く収容することができる。またるつぼRの自重を用いて排出するようにしているので排出機構213の構造を簡単にすることができる。
【0025】
案内路22は、るつぼRを略鉛直方向に落下させて、るつぼ設置部23に案内するものであり、図2に示すように、るつぼ収容部21の供給口214に連通して、略鉛直に形成されている。
【0026】
また、案内路22は、るつぼ収容部21から導入されたるつぼRを上下正向きの状態のまま落下させるものであり、るつぼRが落下する際に上下反転しない内径、例えば、るつぼRの最長の対角線の長さ寸法よりも小さい内径である。
【0027】
案内管5の側壁には、供給口214から導入されたるつぼR以外の異物(例えばるつぼRの破片等)を出口(導出口22b)に到達させること無く案内管5の外部に排出するための、例えばスリット状の貫通孔5Aが1又は複数個設けられている。具体的には、案内管5中、傾斜面211に略垂直に設けられた屈曲部51の側壁下方に貫通孔5Aが設けられている。これにより、破片は自重により貫通孔5Aを通って案内管5外に排出される。また、この貫通孔5Aにより、案内路22におけるるつぼRの詰まりを確認することもできる。
【0028】
また、案内路22の出口近傍には、るつぼRの落下速度を低下させるためのテーパ部221が形成されている。このテーパ部221の最小径は、るつぼRの外径よりも若干大きく、るつぼRが通過可能なものである。また案内路22におけるテーパ部221の下流側は、テーパ部221の最小径と同一径を有する。これならば、案内路22の出口近傍におけるるつぼRの落下速度を小さくすることができ、るつぼ設置部23に着地する際のるつぼRの損傷を防止することができる。また、るつぼ設置部23での設置位置の位置ずれを防止することができ、精度良く設置することができる。
【0029】
るつぼ設置部23は、図1及び図2に示すように、基台101に設けられたエアシリンダ等からなる設置部昇降機構24の駆動軸241の先端部に設けられている。そして、るつぼ設置部23は、案内路22に接続されて、落下したるつぼRを受け取る受取位置Q1と、当該受取位置Q1から鉛直下方に離間した離間位置であるるつぼ搬送位置Q2との間を昇降移動するものである。
【0030】
具体的にるつぼ設置部23は、図2に示すように、るつぼRを収容可能な凹部231xを有し、るつぼRを受け取るるつぼ受け本体231と、当該るつぼ受け本体231の凹部231x内に設けられた載置突起232とを備えている。
【0031】
るつぼ受け本体231は、概略有底円筒形状をなし、内部を視認可能な透明樹脂から形成されており、その凹部231xの内径は、るつぼRの外径よりも大きい。また、るつぼ受け本体231の上端部外周面には、テーパ面231tが形成されている。そして、るつぼ設置部23がるつぼ搬送位置Q2から受取位置Q1に移動するにつれて、前記案内路22を形成する案内管5の出口側端面に設けられたテーパ面5tと嵌ることにより、るつぼ受け本体231及び載置突起232と案内路22との位置決めを行う位置決め機能を発揮する(図2参照)。
【0032】
載置突起232は、概略円柱形状をなすものであり、その直径がるつぼRの開口径よりも若干小さく設定されている。そして、載置突起232は、るつぼ受け本体231の凹部231x内において同軸上に設けられ、るつぼRが上下正向きに設置された場合には、その略水平な上面232aにるつぼRが載置される。一方、載置突起232は、るつぼRが上下逆向きに設置された場合には、るつぼR内に収容される。この構成により、るつぼRを上下正向きに設置した場合と、るつぼRを上下逆向きに設置した場合とで、るつぼ設置部23におけるるつぼRの高さ位置が異なる。
【0033】
また、載置突起232の長さは、用いられる種々のるつぼRにおいて、いずれの深さ寸法よりも長くして、るつぼRのサイズを問わない構造としている。つまり、載置突起232の長さは、上下逆向きに設置した場合に、るつぼRの開口が凹部底面に接触しない長さである。つまり、載置突起232の長さは、上下逆向きに設置した場合に、凹部底面と、るつぼRの開口端面との間に空間が形成されるように設定されている。これにより、るつぼRの破片等の異物が凹部231xに蓄積されている場合であっても、るつぼ受け本体231は、上下逆向きにるつぼRを収容することができる。
【0034】
さらにこのるつぼ供給機構2は、図1及び図2に示すように、るつぼ検知センサ41を備え、前記るつぼ設置部23とともに反転検出機構4を構成する。
【0035】
るつぼ検知センサ41は、載置突起232にるつぼRが上下正向きに設置された場合にのみるつぼRを検出する、光を利用したものである。具体的には、光電センサを用いており、光電センサ41の発光部を出て受光部に到達する光L1の軌道が、るつぼ設置部23に上下正向きに設置されたるつぼRの外周面で反射して受光部に到達するように構成されている。
【0036】
このような構成により、るつぼRを上下正向きに設置した場合には、発光部から出た光L1は、るつぼRの側面により反射されて受光部により受光される。一方、るつぼRを上下逆向きに設置した場合には、発光部から出た光L1は、るつぼRの外側周面により反射されることなく、受光部により受光されない。以上により、るつぼ設置部23にるつぼRが設置されていない場合、設置されていても上下逆向きに設置されている場合には、受光部が光L1を受光しないことから、るつぼRの有無及びるつぼRの反転を検知できる。また、受光部の検知信号は、図示しない報知手段に出力され、警報音等でオペレータに報知するようにしている。なお、るつぼ検知センサ41は、上述した反射型のものに限られず、透過型のものでもよいし、超音波を利用したもの等を用いても構わない。
【0037】
<<搬送・清掃ユニット3>>
【0038】
搬送・清掃ユニット3は、るつぼRが設置されるるつぼ設置部23から下部電極11上にるつぼRを搬送して載置、又は下部電極11上のるつぼRを廃棄ボックス7に搬送して廃棄するとともに、上部電極12及び下部電極11を清掃するものである。
【0039】
具体的にこのものは、第1清掃体311、第2清掃体312、及び把持部である把持爪313を有するアーム部31と、このアーム部31を回転軸322により支持し、当該回転軸322を回転させることにより、アーム部31を回転軸322周りに回転させる回転駆動機構32とを、備えている。
【0040】
アーム部31は、基端部が後述する回転駆動機構32の回転軸322に連結され、その先端部の上部電極12側に第1清掃体311を保持し、下部電極11側に第2清掃体312を保持する。また、アーム部31の下部電極11への進行方向を向く側面には、るつぼRを把持する把持爪313が設けられている。
【0041】
第1清掃体311(上部電極清掃体)は、図3に示すように、上部電極12を清掃するものであり、本実施形態では回転ブラシである。具体的には、第1清掃体311は、上部電極12の電極面121を清掃するため第1電極面ブラシ311aと、上部電極12の試料通過孔12aを清掃するための通過孔ブラシ311bと、それらブラシ311a、311bを保持する第1基体311cとからなる。
【0042】
第1電極面ブラシ311aは、例えばステンレス製のブラシ毛からなり、通過孔ブラシ311bは、例えばナイロン製のブラシ毛からなる。また、通過孔ブラシ311bは、電極面ブラシ311aよりも先端側に設けられている。第1基体311cは、後述する清掃体回転機構6の第1駆動軸64に固定される。
【0043】
第2清掃体312(下部電極清掃体)は、図3に示すように、下部電極11を清掃するものであり、前記第1清掃体311と同様、回転ブラシである。具体的には、第2清掃体312は、下部電極11の電極面111を清掃する第2電極面ブラシ312aと、下部電極11の電極面111の周辺部を清掃するための周辺部ブラシ312bと、それらブラシを保持する第2基体312cとからなる。
【0044】
第2電極面ブラシ312aは、例えばステンレス製のブラシ毛からなり、周辺部ブラシ312bは、例えばナイロン製のブラシ毛からなる。なお、第2電極面ブラシ312aの外側に周辺部ブラシ312bが設けられている。第2基体312cは、後述する清掃体回転機構6の第2駆動軸65に固定される。
【0045】
把持爪313は、少なくとも一方が例えば概略くの字形をなすものである。各把持爪313は、エアチャック機構を用いたものであり、基端部においてアーム部31にスライド駆動可能に保持されており、別に設けた制御機器(図示しない)からの指令で把持爪313間の距離を縮めるようにスライドさせることによって、各把持爪313の中央部分間で前記るつぼRの側周面を狭圧把持できるように構成されている。
【0046】
また、アーム部31は、内部に吸気通路31Aを有する(図3参照)。この吸気通路31Aは、アーム部31基端側上面に形成された接続口と、アーム部31先端側上面に形成された上部電極側開口及びアーム部31先端側下面に設けられた下部電極側開口とを連通するものである。上部電極側開口は、第1駆動軸64と同心円上となるように形成されている。
【0047】
さらに、アーム部31基端側上面には、接続口と連通するように、弾性材料からなる中空の連結体33が設けられている。そして、対向位置R1にあるアーム部31が上昇したときに、連結体33が、基台101の枠体102に設けられた吸引口102Aと連結するようにしている。吸引口102Aは、装置1の外部に設けられた吸引装置(図示しない)に接続されている。対向位置R1におけるアーム部31の昇降移動は、前述した設置部昇降機構24により行われる。アーム部31は、対向位置R1において、設置部昇降機構24の駆動軸241の先端と接触する接触片31xを有している。この接触片31xは、概略L字形状をなすものであり、アーム部の側面に設けられている。なお、設置部昇降機構24の駆動軸241がアーム部31の底面に接触して、アーム部31を持ち上げるように構成しても良い。
【0048】
さらに、アーム部31において、上部電極側開口の開口縁には、上部電極12の下面と接触するシール部材34が設けられている。下部電極側開口は、第2清掃体312の周囲に立設された側壁により形成されている。この側壁314は、アーム部31が上部電極12及び下部電極11により狭持されたときの、下部電極11と第2清掃体312との距離、つまり下部電極11の電極面111に対する第2清掃体312の高さを調節するものである。
【0049】
また、アーム部31には、第1清掃体311及び第2清掃体312を回転するための清掃体回転機構6が設けられている。この清掃体回転機構6は、図3に示すように、アーム部31の基端側下面に固定されたモータ等のアクチュエータ61と、アクチュエータ61の駆動軸に固定された第1プーリ62と、アーム部31の先端側に設けられた第2プーリ63と、当該第1プーリ62の回転駆動を第2プーリ63に伝達する伝達ベルト63と、第2プーリ63の上面に設けられ、第1清掃体311の第1基体311cに連結される第1駆動軸64と、第2プーリ63の下面に設けられ、第2清掃体312の第2基体312cに連結される第2駆動軸65とからなる。なお、アクチュエータ61は、前記制御機器により制御される。
【0050】
回転駆動機構32は、図3に示すように、回転軸322によりアーム部31を昇降自在に支持して、アーム部31を回転させるものであり、各清掃体311、312が各電極11、12に対向する対向位置R1及びその対向位置R1から離間した退避位置R2の間で、アーム部31を回転移動させるものである。また、回転駆動機構32は、対向位置R1及び退避位置R2の間における複数の回転位置でアーム部31を停止可能なものである。
【0051】
回転駆動機構32の具体的な構成は、アーム部31が固定される固定部321と、その固定部321に設けられた貫通孔に相対回転不能且つ軸方向にスライド可能に挿通された回転軸322と、当該回転軸322の下端部に連結され、当該回転軸322を回転させるアクチュエータ323とからなる。これらは、ブラケット324により装置本体11に固定される。アクチュエータ323は、ステッピングモータであり、図示しない制御機器からの駆動パルスにより制御される。
【0052】
このような駆動昇降機構32により、アクチュエータ323により回転軸322を回転させると、回転軸322と相対回転不能なアーム部31も回転する。これにより、アーム部31は、回転軸322を回転中心として、対向位置R1と退避位置R2との間を回転移動する。
【0053】
また、回転軸322と固定部321とは軸方向にスライド可能であり、アーム部31が設置部昇降機構24により押し上げられるに従って、アーム部31は回転軸322をスライドして上昇する。
【0054】
具体的に回転駆動機構32は、図4に示すように、各清掃体311、312が各電極11、12に対向する対向位置R1、るつぼ設置部23上のるつぼRを把持する把持位置R3、把持爪313に把持されたるつぼRを下部電極11上に載置する載置位置R4、把持爪313に把持されたるつぼRを廃棄ボックス7に廃棄する廃棄位置R5、前記各位置から離間した退避位置R2でアーム部31を停止可能である。なお、退避位置R2は、各停止位置R1、R3〜R5に対して、下部電極11及びるつぼ設置部23よりも外方に位置している。
【0055】
また、本実施形態の搬送・清掃ユニット3はアーム部昇降機構(図示しない)を備えている。このアーム部昇降機構は、アーム部31が把持位置R3にある状態において、把持爪313がるつぼ設置部23上にあるるつぼRを把持したときに、アーム部31を鉛直上方に持ち上げる機能を発揮するものである。具体的にアーム部昇降機構は、アーム部31の下面に当接し、昇降移動する駆動軸と、当該駆動軸を昇降移動させるエアシリンダとからなる。このエアシリンダは、前記制御機器により制御される。これならば、るつぼ設置部23のるつぼ受け本体231に収容されているるつぼRを持ち上げて取り出すことができる。
【0056】
<<搬送・清掃ユニット3の動作>>
【0057】
次に、このように構成した搬送・清掃ユニット3の動作について説明する。
【0058】
るつぼ供給段階において、るつぼ供給機構2のるつぼ設置部23が、受取位置Q1まで上昇して、るつぼ収容部21から案内路22に落下するるつぼRを受け取り、搬送位置Q2に下降する。このとき、搬送・清掃ユニット3のアーム部31は退避位置R2にある(図4及び図5参照)。
【0059】
そして、るつぼ搬送段階において、搬送・清掃ユニット3は、回転駆動機構32により、退避位置R2にあるアーム部31を把持位置R3まで回転移動する(図4及び図6参照)。このとき、アーム部31の側面に設けられた把持爪313がるつぼ設置部23に設置されたるつぼRを把持する。その後、アーム部昇降機構により、アーム部31が若干持ち上げられる。このとき持ち上げる量は、るつぼRがるつぼ設置部23のるつぼ受け本体241から出る程度である。
【0060】
次に、回転駆動機構32により、アーム部31は把持位置R3から載置位置R4まで回転移動する(図4及び図7参照)。なお、この回転移動の最中において、アーム部昇降機構によりアーム部31は、若干持ち上げられた状態のままである。
【0061】
そして、アーム部31が載置位置R4に到達して、るつぼRを下部電極11上に載置する際に、アーム部昇降機構はアーム部31を下降させる。このとき、アーム部31を下降させて、把持爪313が把持しているるつぼRの底面が、下部電極11の電極面111と面接触した状態で、把持爪313がるつぼRを放す。これにより、るつぼRは、下部電極11上に押し付けられるように載置され、仮に把持爪313がるつぼRを斜めに把持している場合であっても、下部電極11に押さえ付けられる過程で、るつぼRの下面が下部電極11の電極面111に接触して向きを変えるので、るつぼRを下部電極11上に安定して載置することができ、またるつぼRを上方から落下させて下部電極11上で跳ね返ってしまうことを防止できる。
【0062】
下部電極11上にるつぼRを載置後、アーム部31は回転駆動機構32により退避位置R2に回転移動する(図4参照)。
【0063】
その後、分析段階において、下部電極11が上昇して、上部電極12との間でるつぼRを狭持し、試料が投入されて、当該試料の分析が行われる。分析終了後、下部電極11は下降して下降位置に戻る。
【0064】
次に、るつぼ廃棄段階において、アーム部31は、回転駆動機構32より、退避位置R2から載置位置R4まで回転移動する(図4及び図7参照)。そして、把持爪313により下部電極11上にあるるつぼRを把持する。
【0065】
下部電極11上のるつぼRを把持したアーム部31は、回転駆動機構32により廃棄位置R5に回転移動して、当該廃棄位置R5でるつぼRを放し、廃棄位置R5の下方に設けられた廃棄ボックス7にるつぼRを落とす(図4及び図8参照)。
【0066】
その後、電極清掃段階において、アーム部31は、回転駆動機構32により、廃棄位置R5から対向位置R1まで回転移動する(図4、図9及び図10(a)参照)。このとき、第1清掃体311及び第2清掃体312は、清掃体回転機構6より回転する。
【0067】
そうすると、設置部昇降機構24の駆動軸241の先端が接触片31xに接触して、アーム部31を持ち上げる。このとき、アーム部31の先端側上面に設けたシール部材34が、上部電極12の下面に接触する(図10(b))。また、第1清掃体311のブラシ311a、311bは、上部電極12の電極面121及び試料通過孔12aに押圧接触した状態である。さらに、連結体33は、基台101の枠体102に設けられた吸引口102Aに接続される。
【0068】
このとき、上部電極12に生じるダストは、上部電極12側開口から吸引されて、アーム部31の吸気通路31Aを通り吸引口102Aから外部に排出される。
【0069】
次に、下部電極昇降機構15により、下部電極11が上昇する。このとき、下部電極11の電極面111の周辺部は、第2清掃体312の周囲に設けられた側壁314に接触する(図10(c))また、第2清掃体312のブラシ312a、312bは、下部電極11の電極面111及びその周辺部に押圧接触した状態である。
【0070】
このとき、下部電極11に生じるダストは、側壁314に設けられた吸気路314A及びアーム部31の吸気通路31Aを通り吸引口102Aから外部に排出される。
【0071】
清掃後、下部電極11を下降させた後、設置部昇降機構24により、アーム部31は対向位置R1まで下降し、さらに回転駆動機構32により、退避位置R2に回転移動する。そして、連続して複数の試料を分析する場合には、再び、るつぼ供給段階に移行する。
【0072】
以上の搬送・清掃ユニット3の動作において、本実施形態では、回転駆動機構32が、把持爪313によりるつぼRを把持したアーム部31を、下部電極11上にるつぼRを載置するために載置位置R4に移動させる毎に、当該載置位置R4が下部電極11上で異なるようにしている。つまり、下部電極11上にるつぼRを載置する位置を分析毎に異なるようにしている。例えば分析毎に、下部電極11上にるつぼRを載置する位置を0.5mm程度変化させている。
【0073】
具体的には、制御機器が、回転駆動機構32のアクチュエータ323であるステッピングモータに出力する駆動パルスを、下部電極11上にるつぼRを載置するためにアーム部31を載置位置R4に回転移動させる毎に、異なるように設定している。より詳細には、各分析において、把持爪313によりるつぼRを把持したアーム部31を載置位置R4に移動させる毎に、駆動パルスのパルス量を数パルスだけ異ならせてランダムに設定している。これならば、下部電極11及び上部電極12が同一部分のみ摩耗してしまうという問題を解決することができ、下部電極11及び上部電極12の長寿命化を可能にすることができる。
【0074】
<本実施形態の効果>
【0075】
このように構成した本実施形態に係る元素分析装置100によれば、上部電極12及び下部電極11を清掃するための清掃体311、312及びるつぼRを把持する把持爪313を備えるアーム部31を回転させて、対向位置R1、把持位置R3、載置位置R4、廃棄位置R5及び退避位置R2それぞれに移動させるようにしているので、るつぼの搬送、廃棄及び電極の清掃を簡単な構成である1つの機構により自動化することができ、また、元素分析装置100を小型化することができる。
【0076】
さらに回転駆動機構32のアクチュエータ323としてステッピングモータを用いているので、アーム部31の各停止位置の増減、各停止位置の微調整等を容易に行うことができ、元素分析装置100のメンテナンス性を向上させることができ、また、元素分析装置100の使いやすさ及びるつぼRの載置位置R4等の位置精度を向上させることができる。
【0077】
<その他の変形実施形態>
【0078】
なお、本発明は前記実施形態に限られるものではない。以下の説明において前記実施形態に対応する部材には同一の符号を付すこととする。
【0079】
例えば、回転駆動機構のアクチュエータとしては、ステッピングモータの他に、サーボモータや回転エアシリンダ等の複数の回転位置で停止可能なアクチュエータを用いることができる。また、回転駆動機構は、直動式のエアシリンダの往復運動を回転運動に変換して、回転軸を回転させる構成でも良い。
【0080】
前記実施形態では、対向位置にあるアーム部は、設置部昇降機構により昇降移動するものであったが、設置部昇降機構とは異なる専用の昇降機構を設けても良い。
【0081】
その他、前述した実施形態や変形実施形態の一部又は全部を適宜組み合わせてよいし、本発明は前記実施形態に限られず、その趣旨を逸脱しない範囲で種々の変形が可能であることは言うまでもない。
【図面の簡単な説明】
【0082】
【図1】本発明の一実施形態に係る元素分析装置の模式的構成図。
【図2】るつぼ供給機構の模式的構成図。
【図3】電極部分及び搬送・清掃ユニットを主として示す断面図。
【図4】アーム部の各停止位置を示す図。
【図5】アーム部の退避位置R2を示す模式図。
【図6】アーム部の把持位置R3を示す模式図。
【図7】アーム部の載置位置R4を示す模式図。
【図8】アーム部の廃棄位置R5を示す模式図。
【図9】アーム部の対向位置R1を示す模式図。
【図10】清掃段階を示す模式図。
【符号の説明】
【0083】
100 ・・・元素分析装置
R ・・・るつぼ
12 ・・・上部電極
11 ・・・下部電極
23 ・・・るつぼ設置部
3 ・・・搬送・清掃ユニット
31 ・・・アーム部
311、312・・・清掃体(第1清掃体、第2清掃体)
313 ・・・把持部
32 ・・・回転駆動機構
322 ・・・回転軸
R1 ・・・対向位置
R2 ・・・退避位置
R4 ・・・載置位置
【特許請求の範囲】
【請求項1】
上部電極及び下部電極により、試料を収容するるつぼを狭持し、当該電極に電圧を印加することにより、前記るつぼを加熱して、それによって生じるガスから前記試料の元素を分析する元素分析装置であって、
るつぼが設置されるるつぼ設置部から下部電極上にるつぼを搬送するとともに、前記上部電極又は下部電極を清掃する搬送・清掃ユニットを備え、
前記搬送・清掃ユニットが、
前記上部電極又は前記下部電極を清掃するための清掃体、及び前記るつぼ設置部に設置されたるつぼを把持する把持部を備えたアーム部と、
前記アーム部を回転軸により支持し、前記清掃体が上部電極又は下部電極と対向する対向位置、前記把持部に把持されたるつぼを下部電極上に載置する載置位置、及び前記対向位置及び前記載置位置から離間した退避位置それぞれに前記アーム部を回転移動して停止させる回転駆動機構と、を備える元素分析装置。
【請求項2】
前記回転駆動機構が、下部電極上にるつぼを載置する毎に当該下部電極上におけるるつぼの位置が異なるように、前記アーム部を前記載置位置に移動させる毎に当該載置位置が異なるようにしている請求項1記載の元素分析装置。
【請求項1】
上部電極及び下部電極により、試料を収容するるつぼを狭持し、当該電極に電圧を印加することにより、前記るつぼを加熱して、それによって生じるガスから前記試料の元素を分析する元素分析装置であって、
るつぼが設置されるるつぼ設置部から下部電極上にるつぼを搬送するとともに、前記上部電極又は下部電極を清掃する搬送・清掃ユニットを備え、
前記搬送・清掃ユニットが、
前記上部電極又は前記下部電極を清掃するための清掃体、及び前記るつぼ設置部に設置されたるつぼを把持する把持部を備えたアーム部と、
前記アーム部を回転軸により支持し、前記清掃体が上部電極又は下部電極と対向する対向位置、前記把持部に把持されたるつぼを下部電極上に載置する載置位置、及び前記対向位置及び前記載置位置から離間した退避位置それぞれに前記アーム部を回転移動して停止させる回転駆動機構と、を備える元素分析装置。
【請求項2】
前記回転駆動機構が、下部電極上にるつぼを載置する毎に当該下部電極上におけるるつぼの位置が異なるように、前記アーム部を前記載置位置に移動させる毎に当該載置位置が異なるようにしている請求項1記載の元素分析装置。
【図1】


【図2】

【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−8229(P2010−8229A)
【公開日】平成22年1月14日(2010.1.14)
【国際特許分類】
【出願番号】特願2008−167977(P2008−167977)
【出願日】平成20年6月26日(2008.6.26)
【出願人】(000155023)株式会社堀場製作所 (638)
【Fターム(参考)】
【公開日】平成22年1月14日(2010.1.14)
【国際特許分類】
【出願日】平成20年6月26日(2008.6.26)
【出願人】(000155023)株式会社堀場製作所 (638)
【Fターム(参考)】
[ Back to top ]