
充填量定量化装置、充填量定量化方法
【課題】より低コストで、容器への液体の充填量の定量化を図ることのできる充填量定量化装置、充填量定量化方法を提供することを目的とする。
【解決手段】ホイール14を回転させて、グリッパ36に保持された容器100に遠心力が作用させることで、容器100内に充填された液体の一部が容器100の口部から零し、容器100に残存する液体の量を定量化する。これにより、液量を検出するためのセンサ等の電子機器類が不要であるため、低コストで液体の充填量を定量化できる。容器100の口部から液体を零すには、他に、容器100を傾けたり、容器100を押圧したり、容器100の口部に物体を挿入したり、容器100の口部にガスを吹き付ける方法等が採用できる。
【解決手段】ホイール14を回転させて、グリッパ36に保持された容器100に遠心力が作用させることで、容器100内に充填された液体の一部が容器100の口部から零し、容器100に残存する液体の量を定量化する。これにより、液量を検出するためのセンサ等の電子機器類が不要であるため、低コストで液体の充填量を定量化できる。容器100の口部から液体を零すには、他に、容器100を傾けたり、容器100を押圧したり、容器100の口部に物体を挿入したり、容器100の口部にガスを吹き付ける方法等が採用できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、容器に充填する液体の量を定量化するための充填量定量化装置、充填量定量化方法に関する。
【背景技術】
【0002】
飲料水等の液体をPETボトルやガラス瓶、ボトル缶等の容器に充填する装置として、回転式充填装置が用いられている。この回転式充填装置は、回転する円板の外周部に複数の充填バルブを備えており、円板がほぼ1回転する間に、充填バルブから容器内への充填を行う。
【0003】
容器内に充填された液量を管理するため、容器内に充填された液量を検知する技術が種々提案されている。例えば、容器内にセンサ電極を挿入し、液体がセンサ電極に接触したことを検知することによって、容器内に所定量の液体が充填されたか否かを検出するものがある(例えば、特許文献1参照。)。その他、一般的には流量計により通過する流量を監視して充填量を管理する方法や,秤を用いて実際に充填された重さを量る方法等がある。
【0004】
無菌充填方式等においては、可視光や近赤外線光を用い、容器に充填された液体により透過光量が減衰することを利用し、非接触で充填量の検知を行うことも行われている。また、液体によって容器表面の温度が変化することを利用し、赤外線放射エネルギを、赤外線カメラで撮影することによって、液体の充填量を検知する手法も提案されている(例えば、特許文献2参照。)。
【0005】
【特許文献1】特開2003−130714号公報
【特許文献2】特開2001−116611
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記に示したような充填量の検出を行うためには高価なセンサ等が必要となり、設備コストの上昇を招く。各種設備類において、コスト低減は常に求められている課題であり、過大・過剰な装備は避けなければならない。
本発明は、このような技術的課題に基づいてなされたもので、より低コストで、容器への液体の充填量の定量化を図ることのできる充填量定量化装置、充填量定量化方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
ところで、液体を容器に充填する際には、容器の口部に液体が付着すると、そこから菌が繁殖したりすることがあるため、不具合発生を避けるために、液体を容器の口部から零さないように充填することが行われている。
そして、万が一液体が容器の口部から零れた場合に対処するため、液体を充填した容器の口部に水を吹きかけて洗浄する手法も提案されている(例えば、特許第3703668号公報、特開2004−66076参照。)。
【0008】
しかし、充填する液体がミネラルウォータ等の場合には、容器の口部から液体が零れたとしても、これを気にする必要はなく、当然、液体充填後に水を吹きかけて洗浄する機構も不要である。
このような観点でさらなる検討を行った本発明者らは、充填する液体がミネラルウォータ等である場合においては、液体の充填量の管理にも、従来とは全く異なるアプローチが行えるのではないかと考えるに至った。
【0009】
そこでなされた本発明の充填量定量化装置は、容器に液体を充填する充填装置と容器の口部にキャップを装着するキャッパとの間に設けられ、液体が充填された容器を搬送する搬送部と、搬送部で搬送される容器から、容器に充填された液体の一部を零すことで容器に残存する液体の量を定量化する液体定量化部と、を備えることを特徴とする。
充填する液体がミネラルウォータ等の場合、従来、容器口部を洗浄するために用いていたものと何ら変わりはなく、こぼしても容器の口部を汚すこともない。そこで、容器から液体の一部を零して容器に残存する液体の量を定量化することができる。
液体定量化部としては、容器を円周状の軌道に沿って旋回させ、遠心力により液体の一部を零してもよい。
また、容器を傾けることで液体の一部を零してもよい。この場合、容器を保持するグリッパを傾けることで、容器を傾けることができる。また、搬送部で搬送される容器のガイド部材により、容器を傾けることもできる。
さらに、容器を押圧することで液体の一部を零してもよい。
この他、液体の一部を零すには、容器内に一定体積を有した挿入物を挿入してもよいし、容器の口部にガスを吹き付けてもよい。
【0010】
本発明の充填量定量化方法は、容器に液体を充填する充填装置と容器の口部にキャップを装着するキャッパとの間において、液体が充填された容器から、容器に充填された液体の一部を零すことで容器に残存する液体の量を定量化することを特徴とすることもできる。
【発明の効果】
【0011】
本発明によれば、液体を充填した容器から液体の一部を零すことで、容器に残存する液体の量を定量化することができる。このとき、液量を検出するためのセンサ等の電子機器類が不要であるため、低コストで液体の充填量を定量化できる。
【発明を実施するための最良の形態】
【0012】
以下、添付図面に示す実施の形態に基づいてこの発明を詳細に説明する。
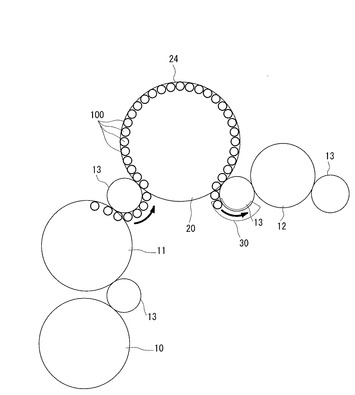
図1は、本実施の形態における飲料充填機の全体構成を説明するための図である。
図1に示すように、飲料充填機は、容器100を殺菌する殺菌装置10、容器100をすすぐすすぎ装置11、容器100に液体を充填する充填装置20、液体が充填された容器100にキャップを装着するキャッパ12を主に備えている。
これら殺菌装置10、すすぎ装置11、充填装置20、キャッパ12間には、搬送スターホイール(搬送部)13等が設けられ、これによって、容器100の受け渡し等が行われるようになっている。
【0013】
充填装置20には円盤状のホイール24が備えられ、ホイール24はモータ等の駆動源によって回転駆動されることでほぼ水平面内で回転するようになっている。ホイール24の外周部には、液を充填すべき容器100を保持するグリッパ(図示無し)と、グリッパで保持した容器100に液を充填するための充填ノズル(図示無し)とが、ホイール24の周方向に一定間隔ごとに配置されている。ホイール24が回転した状態において、所定の投入位置において容器100がグリッパによって保持され、この容器100はホイール24の周方向に搬送される。グリッパで保持された状態のまま容器100が搬送される間に、容器100に充填ノズルから液体が充填される。液体の充填後、容器100は、所定の搬出位置においてグリッパによる保持が解放され、後工程のキャッパ12に向けて搬出される。
【0014】
さて、このような飲料充填機においては、充填装置20において容器100に液体が充填されて以降、キャッパ12で容器100にキャップの装着がなされるまでの間の工程に、容器100への液体充填量の定量化を図るための充填量定量化装置30が備えられている。この充填量定量化装置30は、例えば搬送スターホイール13によって搬送される容器100に充填した液体の一部を容器100外に零すことで、容器100内の液体量の定量化を図るものである。
このような充填量定量化装置30において、容器100に充填した液体の一部を零すことで容器100内の液体量の定量化を図る液体定量化部としては、以下のような複数の形態が提案できる。
【0015】
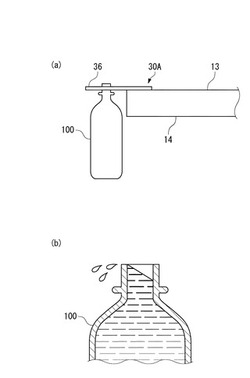
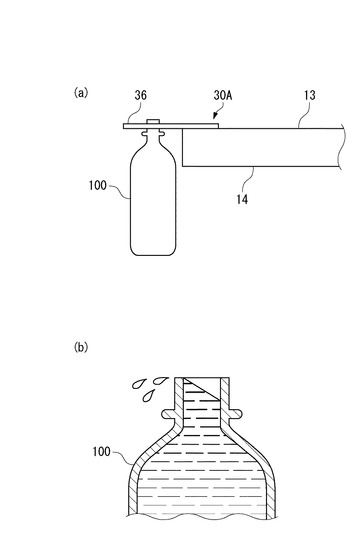
図2(a)に示す液体定量化部30Aは、液体を充填した容器100を回転させて遠心力を作用させることによって、容器100内の液体を零すものである。
この液体定量化部30Aは、例えば搬送スターホイール13に設けられている。搬送スターホイール13には、円盤状のホイール14が備えられ、ホイール14はモータ等の駆動源によって回転駆動されることでほぼ水平面内で回転する。ホイール14の外周部には、液を充填すべき容器100を保持するグリッパ36が一定間隔ごとに複数設けられている。
ホイール14を回転させると、グリッパ36に保持された容器100もホイール14の周方向に回転し、これによって容器100に遠心力が作用する。図2(b)に示すように、容器100に遠心力が作用すると、容器100内に充填された液体の一部が容器100の口部から零れる。
このとき、ホイール14の周速を一定に保つことで、順次グリッパ36に保持されてホイール14によって周方向に搬送される複数の容器100間において、作用する遠心力も一定となり、これによってそれぞれの容器100に残存する液体の量が定量化される。なお、容器100に作用させる遠心力の大きさは、ホイール14の半径と周速とによって決まるため、残存させる液体の量に応じてこれら半径と周速とを適宜設定すればよい。
【0016】
このようにして、液体定量化部30Aにおいて、液体を充填した容器100から液体の一部を零すことで、容器100に残存する液体の量を定量化することができる。このとき、液量を検出するためのセンサ等の電子機器類が不要であるため、低コストで前記効果を実現できる。
【0017】
ところで、上記においては、液体定量化部30Aを搬送スターホイール13に設ける構成としたが、これに限るものではない。例えば、充填装置20において、容器100への液体の充填が完了して以降に液体定量化部30Aを設けても良い。これ以外でも、液体を充填した容器100を回転させて遠心力を作用させることによって、容器100内の液体を零すことができるのであれば、容器100に液体が充填されて以降、キャッパ12で容器100にキャップの装着がなされるまでの間において、液体定量化部30Aはいかなる場所に設けても良い。ただし、十分な遠心力を発揮させるためには、周速が速い方が良い。したがって、一般に大径な充填装置20ではなく、その後工程の搬送スターホイール13等、充填装置20よりも小径な回転体に液体定量化部30Aを備えるのが好ましい。
【0018】
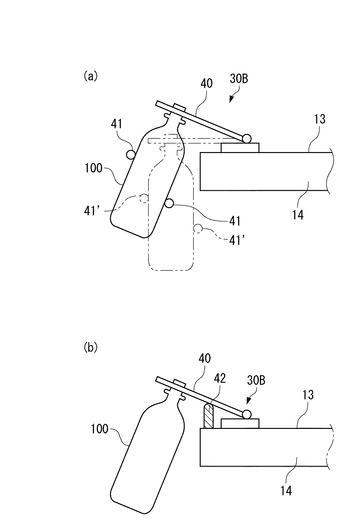
図3に示す液体定量化部30Bは、液体を充填した容器100を傾けることで容器100内の液体を零すものである。
この液体定量化部30Bは、例えば搬送スターホイール13に設けられている。搬送スターホイール13には、円盤状のホイール14が備えられ、ホイール14はモータ等の駆動源によって回転駆動されることでほぼ水平面内で回転する。ホイール14の外周部には、液を充填すべき容器100を保持する複数のグリッパ40が設けられている。各グリッパ40は、搬送スターホイール13に対して揺動可能に設けられている。
各グリッパ40では、保持した容器100を搬送スターホイール13の回転によって搬送し、容器100から液体を零す領域においては、容器100を傾けて液体を零すようになっている。容器100を傾けるには、図3(a)に示すように、容器100を、ガイド部材41等によって傾斜させる。この場合、グリッパ40は、ガイド部材41にガイドされて容器100が傾くにともなってグリッパ40が揺動できるよう、揺動自在に搬送スターホイール13に設ける。
また、図3(b)に示すように、容器100を保持したグリッパ40自体を、カム42等で傾けてもよい。
【0019】
容器100から液体を零す領域以外においては、特に容器100を前後の工程との間で受け渡すときにグリッパ40に保持された容器100が鉛直状態を維持するよう、グリッパ40の揺動を規制するストッパを設けたり、図3(a)に示したように、容器100のガイド部材41’を設けるのが好ましい。
【0020】
このような構成においても、容器100から液体を零す領域において、グリッパ40で保持した容器100を傾けることで液体を零して容器100内に残存する液体の定量化を図ることができる。このとき、液量を検出するためのセンサ等の電子機器類が不要であるため、低コストで前記効果を実現できる。
【0021】
ところで、図3に示した構成において、グリッパ40を、シリンダ等を用いた駆動機構で揺動させることも可能であるが、その場合、グリッパ40の数に応じた駆動機構が必要であり、装置のコスト増につながる。これに対し、グリッパ40が揺動自在となっている上記構成においては、容器100から液体を零す領域において容器100を傾けるためのガイド部材41やカム42等を設けるのみで良く、低コストで上記効果を得ることができる。
【0022】
なお、図3に示した構成において、グリッパ40で保持した容器100を傾けるための機構は、ガイド部材41やカム42に限るものではなく、さらに他の機構を用いてもよい。また、容器100を傾ける方向は、限定するものではない。また、遠心力ではなく、容器100を機械的に傾けることで容器100中の液体を零す構成であるため、必ずしも搬送スターホイール13等の回転体に備える必要はなく、直線的な搬送経路上に上記したような構成を備えてもよい。
【0023】
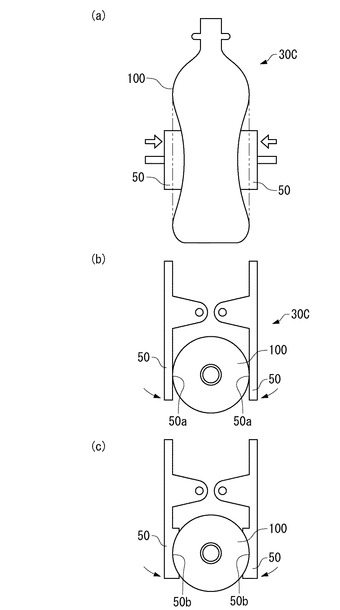
図4(a)に示す液体定量化部30Cは、液体を充填した容器100を押圧して変形させることで、容器100内の液体を零すものである。
液体定量化部30Cは、充填装置20において液体が充填された容器100を、側方から押圧する一対の押圧部材50、50を備える。これら押圧部材50、50で容器100を両側から押圧すると、容器100が変形し、これによって容器100の内容積が減少して容器100内に充填された液体が零れ出る。その結果、容器100内に残存する液体の定量化を図ることができる。このとき、液量を検出するためのセンサ等の電子機器類が不要であるため、低コストで前記効果を実現できる。
【0024】
なお、押圧部材50、50は、いかなる構成であってもよく、例えば、図4(b)に示すように、容器100に接する面50aを平面状としてもよいし、図4(c)に示すように、容器100の外周形状に応じた曲面を有した凹部50bを有する構成とすることもできる。
また、搬送される容器100の両側に設けた一対のガイドレール間隔を一部で狭めることでも容器100を変形させることが可能であるが、この場合、ガイドレールと容器100とが擦れるため、異物発生や容器100への傷付きの原因となるため好ましくない。
さらに、必ずしも搬送スターホイール13等の回転体に備える必要はないため、直線的な搬送経路上に上記したような構成を備えてもよい。
【0025】
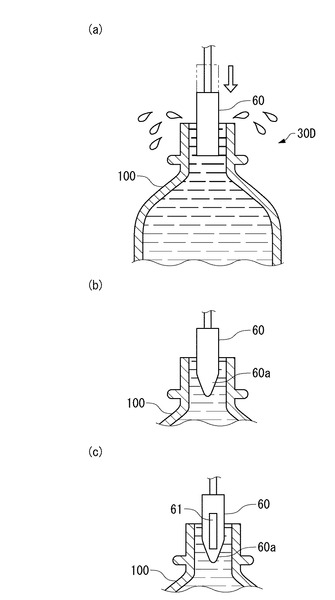
図5に示す液体定量化部30Dは、液体を充填した容器100内に、一定容積を有した物体(挿入物)60を挿入することで、容器100内の液体を零すものである。
これには、物体60を、容器100の口部の内径よりも小さな外径を有したものとする。この物体60を、容器100の口部内に挿抜可能とする機構で保持し、容器100内の液体を零す工程において、物体60を容器100の口部内に一定長さだけ挿入する。
これによって容器100内に充填された液体が零れ出て、容器100内に残存する液体の定量化を図ることができる。このとき、液量を検出するためのセンサ等の電子機器類が不要であるため、低コストで前記効果を実現できる。
【0026】
なお、図5(b)に示すように、物体60を、下端の先端部60aに向けてその外径が窄まる円錐あるいは角錐状とするのが好ましい。これによって、物体60を挿入するときに、物体60の挿入抵抗を小さくするとともに、物体60を挿入することで容器100内の液体が跳ね飛ばされて零す液体の量が不安定になるのを防ぐことができる。
【0027】
さらに、図5(c)に示すように、物体60の外周面に、上下方向に連続するスリット61を形成するのも有効である。このスリット61は、物体60の断面方向に貫通させてもよいし、一定深さに形成してもよい。スリット61によっても、物体60を挿入するときに物体60の挿入抵抗を小さくするとともに、物体60を挿入することで容器100内の液体が跳ね飛ばされて零す液体の量が不安定になるのを防ぐことができる。
【0028】
なお、図5に示した構成では、必ずしも搬送スターホイール13等の回転体に備える必要はないため、直線的な搬送経路上に上記したような構成を備えてもよい。
【0029】
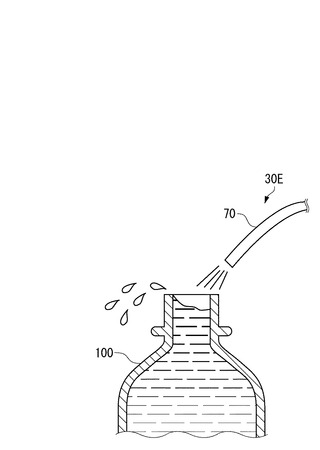
図6に示す液体定量化部30Eは、液体を充填した容器100内に、ガスを吹き込むことで、容器100内の液体を零すものである。
これには、液体が充填された容器100の口部に対し、所定の圧力・流量でエア等のガスを吹き付けるノズル70を設ける。容器100内の液体を零す工程において、ノズル70から吹き出すガスを、グリッパ36に保持された容器100の口部に吹き付ける。
これによって容器100内に充填された液体が零れ出て、容器100内に残存する液体の定量化を図ることができる。このとき、液量を検出するためのセンサ等の電子機器類が不要であるため、低コストで前記効果を実現できる。
【0030】
なお、図6に示した構成では、必ずしも搬送スターホイール13等の回転体に備える必要はないため、直線的な搬送経路上に上記したような構成を備えてもよい。
これ以外にも、本発明の主旨を逸脱しない限り、上記実施の形態で挙げた構成を取捨選択したり、他の構成に適宜変更することが可能である。
【図面の簡単な説明】
【0031】
【図1】本実施の形態における充填量定量化装置を備えた充填システムの概略構成を示す図である。
【図2】遠心力により容器から液体を零す構成の例を示す図である。
【図3】容器を傾けて液体を零す構成の例を示す図である。
【図4】容器を押圧して液体を零す構成の例を示す図である。
【図5】容器に物体を挿入して液体を零す構成の例を示す図である。
【図6】容器にガスを吹き込んで液体を零す構成の例を示す図である。
【符号の説明】
【0032】
12…キャッパ、13…搬送スターホイール(搬送部)、20…充填装置、30…充填量定量化装置、30A、30B、30C、30D、30E…液体定量化部、40…グリッパ、41…ガイド部材、42…カム、50…押圧部材、60…物体(挿入物)、61…スリット、70…ノズル、100…容器
【技術分野】
【0001】
本発明は、容器に充填する液体の量を定量化するための充填量定量化装置、充填量定量化方法に関する。
【背景技術】
【0002】
飲料水等の液体をPETボトルやガラス瓶、ボトル缶等の容器に充填する装置として、回転式充填装置が用いられている。この回転式充填装置は、回転する円板の外周部に複数の充填バルブを備えており、円板がほぼ1回転する間に、充填バルブから容器内への充填を行う。
【0003】
容器内に充填された液量を管理するため、容器内に充填された液量を検知する技術が種々提案されている。例えば、容器内にセンサ電極を挿入し、液体がセンサ電極に接触したことを検知することによって、容器内に所定量の液体が充填されたか否かを検出するものがある(例えば、特許文献1参照。)。その他、一般的には流量計により通過する流量を監視して充填量を管理する方法や,秤を用いて実際に充填された重さを量る方法等がある。
【0004】
無菌充填方式等においては、可視光や近赤外線光を用い、容器に充填された液体により透過光量が減衰することを利用し、非接触で充填量の検知を行うことも行われている。また、液体によって容器表面の温度が変化することを利用し、赤外線放射エネルギを、赤外線カメラで撮影することによって、液体の充填量を検知する手法も提案されている(例えば、特許文献2参照。)。
【0005】
【特許文献1】特開2003−130714号公報
【特許文献2】特開2001−116611
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記に示したような充填量の検出を行うためには高価なセンサ等が必要となり、設備コストの上昇を招く。各種設備類において、コスト低減は常に求められている課題であり、過大・過剰な装備は避けなければならない。
本発明は、このような技術的課題に基づいてなされたもので、より低コストで、容器への液体の充填量の定量化を図ることのできる充填量定量化装置、充填量定量化方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
ところで、液体を容器に充填する際には、容器の口部に液体が付着すると、そこから菌が繁殖したりすることがあるため、不具合発生を避けるために、液体を容器の口部から零さないように充填することが行われている。
そして、万が一液体が容器の口部から零れた場合に対処するため、液体を充填した容器の口部に水を吹きかけて洗浄する手法も提案されている(例えば、特許第3703668号公報、特開2004−66076参照。)。
【0008】
しかし、充填する液体がミネラルウォータ等の場合には、容器の口部から液体が零れたとしても、これを気にする必要はなく、当然、液体充填後に水を吹きかけて洗浄する機構も不要である。
このような観点でさらなる検討を行った本発明者らは、充填する液体がミネラルウォータ等である場合においては、液体の充填量の管理にも、従来とは全く異なるアプローチが行えるのではないかと考えるに至った。
【0009】
そこでなされた本発明の充填量定量化装置は、容器に液体を充填する充填装置と容器の口部にキャップを装着するキャッパとの間に設けられ、液体が充填された容器を搬送する搬送部と、搬送部で搬送される容器から、容器に充填された液体の一部を零すことで容器に残存する液体の量を定量化する液体定量化部と、を備えることを特徴とする。
充填する液体がミネラルウォータ等の場合、従来、容器口部を洗浄するために用いていたものと何ら変わりはなく、こぼしても容器の口部を汚すこともない。そこで、容器から液体の一部を零して容器に残存する液体の量を定量化することができる。
液体定量化部としては、容器を円周状の軌道に沿って旋回させ、遠心力により液体の一部を零してもよい。
また、容器を傾けることで液体の一部を零してもよい。この場合、容器を保持するグリッパを傾けることで、容器を傾けることができる。また、搬送部で搬送される容器のガイド部材により、容器を傾けることもできる。
さらに、容器を押圧することで液体の一部を零してもよい。
この他、液体の一部を零すには、容器内に一定体積を有した挿入物を挿入してもよいし、容器の口部にガスを吹き付けてもよい。
【0010】
本発明の充填量定量化方法は、容器に液体を充填する充填装置と容器の口部にキャップを装着するキャッパとの間において、液体が充填された容器から、容器に充填された液体の一部を零すことで容器に残存する液体の量を定量化することを特徴とすることもできる。
【発明の効果】
【0011】
本発明によれば、液体を充填した容器から液体の一部を零すことで、容器に残存する液体の量を定量化することができる。このとき、液量を検出するためのセンサ等の電子機器類が不要であるため、低コストで液体の充填量を定量化できる。
【発明を実施するための最良の形態】
【0012】
以下、添付図面に示す実施の形態に基づいてこの発明を詳細に説明する。
図1は、本実施の形態における飲料充填機の全体構成を説明するための図である。
図1に示すように、飲料充填機は、容器100を殺菌する殺菌装置10、容器100をすすぐすすぎ装置11、容器100に液体を充填する充填装置20、液体が充填された容器100にキャップを装着するキャッパ12を主に備えている。
これら殺菌装置10、すすぎ装置11、充填装置20、キャッパ12間には、搬送スターホイール(搬送部)13等が設けられ、これによって、容器100の受け渡し等が行われるようになっている。
【0013】
充填装置20には円盤状のホイール24が備えられ、ホイール24はモータ等の駆動源によって回転駆動されることでほぼ水平面内で回転するようになっている。ホイール24の外周部には、液を充填すべき容器100を保持するグリッパ(図示無し)と、グリッパで保持した容器100に液を充填するための充填ノズル(図示無し)とが、ホイール24の周方向に一定間隔ごとに配置されている。ホイール24が回転した状態において、所定の投入位置において容器100がグリッパによって保持され、この容器100はホイール24の周方向に搬送される。グリッパで保持された状態のまま容器100が搬送される間に、容器100に充填ノズルから液体が充填される。液体の充填後、容器100は、所定の搬出位置においてグリッパによる保持が解放され、後工程のキャッパ12に向けて搬出される。
【0014】
さて、このような飲料充填機においては、充填装置20において容器100に液体が充填されて以降、キャッパ12で容器100にキャップの装着がなされるまでの間の工程に、容器100への液体充填量の定量化を図るための充填量定量化装置30が備えられている。この充填量定量化装置30は、例えば搬送スターホイール13によって搬送される容器100に充填した液体の一部を容器100外に零すことで、容器100内の液体量の定量化を図るものである。
このような充填量定量化装置30において、容器100に充填した液体の一部を零すことで容器100内の液体量の定量化を図る液体定量化部としては、以下のような複数の形態が提案できる。
【0015】
図2(a)に示す液体定量化部30Aは、液体を充填した容器100を回転させて遠心力を作用させることによって、容器100内の液体を零すものである。
この液体定量化部30Aは、例えば搬送スターホイール13に設けられている。搬送スターホイール13には、円盤状のホイール14が備えられ、ホイール14はモータ等の駆動源によって回転駆動されることでほぼ水平面内で回転する。ホイール14の外周部には、液を充填すべき容器100を保持するグリッパ36が一定間隔ごとに複数設けられている。
ホイール14を回転させると、グリッパ36に保持された容器100もホイール14の周方向に回転し、これによって容器100に遠心力が作用する。図2(b)に示すように、容器100に遠心力が作用すると、容器100内に充填された液体の一部が容器100の口部から零れる。
このとき、ホイール14の周速を一定に保つことで、順次グリッパ36に保持されてホイール14によって周方向に搬送される複数の容器100間において、作用する遠心力も一定となり、これによってそれぞれの容器100に残存する液体の量が定量化される。なお、容器100に作用させる遠心力の大きさは、ホイール14の半径と周速とによって決まるため、残存させる液体の量に応じてこれら半径と周速とを適宜設定すればよい。
【0016】
このようにして、液体定量化部30Aにおいて、液体を充填した容器100から液体の一部を零すことで、容器100に残存する液体の量を定量化することができる。このとき、液量を検出するためのセンサ等の電子機器類が不要であるため、低コストで前記効果を実現できる。
【0017】
ところで、上記においては、液体定量化部30Aを搬送スターホイール13に設ける構成としたが、これに限るものではない。例えば、充填装置20において、容器100への液体の充填が完了して以降に液体定量化部30Aを設けても良い。これ以外でも、液体を充填した容器100を回転させて遠心力を作用させることによって、容器100内の液体を零すことができるのであれば、容器100に液体が充填されて以降、キャッパ12で容器100にキャップの装着がなされるまでの間において、液体定量化部30Aはいかなる場所に設けても良い。ただし、十分な遠心力を発揮させるためには、周速が速い方が良い。したがって、一般に大径な充填装置20ではなく、その後工程の搬送スターホイール13等、充填装置20よりも小径な回転体に液体定量化部30Aを備えるのが好ましい。
【0018】
図3に示す液体定量化部30Bは、液体を充填した容器100を傾けることで容器100内の液体を零すものである。
この液体定量化部30Bは、例えば搬送スターホイール13に設けられている。搬送スターホイール13には、円盤状のホイール14が備えられ、ホイール14はモータ等の駆動源によって回転駆動されることでほぼ水平面内で回転する。ホイール14の外周部には、液を充填すべき容器100を保持する複数のグリッパ40が設けられている。各グリッパ40は、搬送スターホイール13に対して揺動可能に設けられている。
各グリッパ40では、保持した容器100を搬送スターホイール13の回転によって搬送し、容器100から液体を零す領域においては、容器100を傾けて液体を零すようになっている。容器100を傾けるには、図3(a)に示すように、容器100を、ガイド部材41等によって傾斜させる。この場合、グリッパ40は、ガイド部材41にガイドされて容器100が傾くにともなってグリッパ40が揺動できるよう、揺動自在に搬送スターホイール13に設ける。
また、図3(b)に示すように、容器100を保持したグリッパ40自体を、カム42等で傾けてもよい。
【0019】
容器100から液体を零す領域以外においては、特に容器100を前後の工程との間で受け渡すときにグリッパ40に保持された容器100が鉛直状態を維持するよう、グリッパ40の揺動を規制するストッパを設けたり、図3(a)に示したように、容器100のガイド部材41’を設けるのが好ましい。
【0020】
このような構成においても、容器100から液体を零す領域において、グリッパ40で保持した容器100を傾けることで液体を零して容器100内に残存する液体の定量化を図ることができる。このとき、液量を検出するためのセンサ等の電子機器類が不要であるため、低コストで前記効果を実現できる。
【0021】
ところで、図3に示した構成において、グリッパ40を、シリンダ等を用いた駆動機構で揺動させることも可能であるが、その場合、グリッパ40の数に応じた駆動機構が必要であり、装置のコスト増につながる。これに対し、グリッパ40が揺動自在となっている上記構成においては、容器100から液体を零す領域において容器100を傾けるためのガイド部材41やカム42等を設けるのみで良く、低コストで上記効果を得ることができる。
【0022】
なお、図3に示した構成において、グリッパ40で保持した容器100を傾けるための機構は、ガイド部材41やカム42に限るものではなく、さらに他の機構を用いてもよい。また、容器100を傾ける方向は、限定するものではない。また、遠心力ではなく、容器100を機械的に傾けることで容器100中の液体を零す構成であるため、必ずしも搬送スターホイール13等の回転体に備える必要はなく、直線的な搬送経路上に上記したような構成を備えてもよい。
【0023】
図4(a)に示す液体定量化部30Cは、液体を充填した容器100を押圧して変形させることで、容器100内の液体を零すものである。
液体定量化部30Cは、充填装置20において液体が充填された容器100を、側方から押圧する一対の押圧部材50、50を備える。これら押圧部材50、50で容器100を両側から押圧すると、容器100が変形し、これによって容器100の内容積が減少して容器100内に充填された液体が零れ出る。その結果、容器100内に残存する液体の定量化を図ることができる。このとき、液量を検出するためのセンサ等の電子機器類が不要であるため、低コストで前記効果を実現できる。
【0024】
なお、押圧部材50、50は、いかなる構成であってもよく、例えば、図4(b)に示すように、容器100に接する面50aを平面状としてもよいし、図4(c)に示すように、容器100の外周形状に応じた曲面を有した凹部50bを有する構成とすることもできる。
また、搬送される容器100の両側に設けた一対のガイドレール間隔を一部で狭めることでも容器100を変形させることが可能であるが、この場合、ガイドレールと容器100とが擦れるため、異物発生や容器100への傷付きの原因となるため好ましくない。
さらに、必ずしも搬送スターホイール13等の回転体に備える必要はないため、直線的な搬送経路上に上記したような構成を備えてもよい。
【0025】
図5に示す液体定量化部30Dは、液体を充填した容器100内に、一定容積を有した物体(挿入物)60を挿入することで、容器100内の液体を零すものである。
これには、物体60を、容器100の口部の内径よりも小さな外径を有したものとする。この物体60を、容器100の口部内に挿抜可能とする機構で保持し、容器100内の液体を零す工程において、物体60を容器100の口部内に一定長さだけ挿入する。
これによって容器100内に充填された液体が零れ出て、容器100内に残存する液体の定量化を図ることができる。このとき、液量を検出するためのセンサ等の電子機器類が不要であるため、低コストで前記効果を実現できる。
【0026】
なお、図5(b)に示すように、物体60を、下端の先端部60aに向けてその外径が窄まる円錐あるいは角錐状とするのが好ましい。これによって、物体60を挿入するときに、物体60の挿入抵抗を小さくするとともに、物体60を挿入することで容器100内の液体が跳ね飛ばされて零す液体の量が不安定になるのを防ぐことができる。
【0027】
さらに、図5(c)に示すように、物体60の外周面に、上下方向に連続するスリット61を形成するのも有効である。このスリット61は、物体60の断面方向に貫通させてもよいし、一定深さに形成してもよい。スリット61によっても、物体60を挿入するときに物体60の挿入抵抗を小さくするとともに、物体60を挿入することで容器100内の液体が跳ね飛ばされて零す液体の量が不安定になるのを防ぐことができる。
【0028】
なお、図5に示した構成では、必ずしも搬送スターホイール13等の回転体に備える必要はないため、直線的な搬送経路上に上記したような構成を備えてもよい。
【0029】
図6に示す液体定量化部30Eは、液体を充填した容器100内に、ガスを吹き込むことで、容器100内の液体を零すものである。
これには、液体が充填された容器100の口部に対し、所定の圧力・流量でエア等のガスを吹き付けるノズル70を設ける。容器100内の液体を零す工程において、ノズル70から吹き出すガスを、グリッパ36に保持された容器100の口部に吹き付ける。
これによって容器100内に充填された液体が零れ出て、容器100内に残存する液体の定量化を図ることができる。このとき、液量を検出するためのセンサ等の電子機器類が不要であるため、低コストで前記効果を実現できる。
【0030】
なお、図6に示した構成では、必ずしも搬送スターホイール13等の回転体に備える必要はないため、直線的な搬送経路上に上記したような構成を備えてもよい。
これ以外にも、本発明の主旨を逸脱しない限り、上記実施の形態で挙げた構成を取捨選択したり、他の構成に適宜変更することが可能である。
【図面の簡単な説明】
【0031】
【図1】本実施の形態における充填量定量化装置を備えた充填システムの概略構成を示す図である。
【図2】遠心力により容器から液体を零す構成の例を示す図である。
【図3】容器を傾けて液体を零す構成の例を示す図である。
【図4】容器を押圧して液体を零す構成の例を示す図である。
【図5】容器に物体を挿入して液体を零す構成の例を示す図である。
【図6】容器にガスを吹き込んで液体を零す構成の例を示す図である。
【符号の説明】
【0032】
12…キャッパ、13…搬送スターホイール(搬送部)、20…充填装置、30…充填量定量化装置、30A、30B、30C、30D、30E…液体定量化部、40…グリッパ、41…ガイド部材、42…カム、50…押圧部材、60…物体(挿入物)、61…スリット、70…ノズル、100…容器
【特許請求の範囲】
【請求項1】
容器に液体を充填する充填装置と前記容器の口部にキャップを装着するキャッパとの間に設けられ、
液体が充填された前記容器を搬送する搬送部と、
前記搬送部で搬送される前記容器から、前記容器に充填された前記液体の一部を零すことで前記容器に残存する前記液体の量を定量化する液体定量化部と、
を備えることを特徴とする充填量定量化装置。
【請求項2】
前記液体定量化部は、前記容器を円周状の軌道に沿って旋回させ、遠心力により前記液体の一部を零すことを特徴とする請求項1に記載の充填量定量化装置。
【請求項3】
前記液体定量化部は、前記容器を傾けることで前記液体の一部を零すことを特徴とする請求項1に記載の充填量定量化装置。
【請求項4】
前記液体定量化部は、前記容器を保持するグリッパを傾けることで、前記容器を傾けることを特徴とする請求項3に記載の充填量定量化装置。
【請求項5】
前記液体定量化部は、前記搬送部で搬送される前記容器のガイド部材により、前記容器を傾けることを特徴とする請求項3に記載の充填量定量化装置。
【請求項6】
前記液体定量化部は、前記容器を押圧することで前記液体の一部を零すことを特徴とする請求項1に記載の充填量定量化装置。
【請求項7】
前記液体定量化部は、前記容器内に一定体積を有した挿入物を挿入することで前記液体の一部を零すことを特徴とする請求項1に記載の充填量定量化装置。
【請求項8】
前記液体定量化部は、前記容器の口部にガスを吹き付けることで前記液体の一部を零すことを特徴とする請求項1に記載の充填量定量化装置。
【請求項9】
容器に液体を充填する充填装置と前記容器の口部にキャップを装着するキャッパとの間において、
液体が充填された前記容器から、前記容器に充填された前記液体の一部を零すことで前記容器に残存する前記液体の量を定量化することを特徴とする充填量定量化方法。
【請求項1】
容器に液体を充填する充填装置と前記容器の口部にキャップを装着するキャッパとの間に設けられ、
液体が充填された前記容器を搬送する搬送部と、
前記搬送部で搬送される前記容器から、前記容器に充填された前記液体の一部を零すことで前記容器に残存する前記液体の量を定量化する液体定量化部と、
を備えることを特徴とする充填量定量化装置。
【請求項2】
前記液体定量化部は、前記容器を円周状の軌道に沿って旋回させ、遠心力により前記液体の一部を零すことを特徴とする請求項1に記載の充填量定量化装置。
【請求項3】
前記液体定量化部は、前記容器を傾けることで前記液体の一部を零すことを特徴とする請求項1に記載の充填量定量化装置。
【請求項4】
前記液体定量化部は、前記容器を保持するグリッパを傾けることで、前記容器を傾けることを特徴とする請求項3に記載の充填量定量化装置。
【請求項5】
前記液体定量化部は、前記搬送部で搬送される前記容器のガイド部材により、前記容器を傾けることを特徴とする請求項3に記載の充填量定量化装置。
【請求項6】
前記液体定量化部は、前記容器を押圧することで前記液体の一部を零すことを特徴とする請求項1に記載の充填量定量化装置。
【請求項7】
前記液体定量化部は、前記容器内に一定体積を有した挿入物を挿入することで前記液体の一部を零すことを特徴とする請求項1に記載の充填量定量化装置。
【請求項8】
前記液体定量化部は、前記容器の口部にガスを吹き付けることで前記液体の一部を零すことを特徴とする請求項1に記載の充填量定量化装置。
【請求項9】
容器に液体を充填する充填装置と前記容器の口部にキャップを装着するキャッパとの間において、
液体が充填された前記容器から、前記容器に充填された前記液体の一部を零すことで前記容器に残存する前記液体の量を定量化することを特徴とする充填量定量化方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−154876(P2009−154876A)
【公開日】平成21年7月16日(2009.7.16)
【国際特許分類】
【出願番号】特願2007−331419(P2007−331419)
【出願日】平成19年12月25日(2007.12.25)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成21年7月16日(2009.7.16)
【国際特許分類】
【出願日】平成19年12月25日(2007.12.25)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]