
充電システムおよび電動車両
【課題】充電器と電動車両との間の通電状態を正確に判定する。
【解決手段】電動車両のバッテリは定電流充電によって充電されている。充電器側の供給電圧Vsにフィルタ処理を施した充電器側データDsが算出され、電動車両側の受給電圧Vrにフィルタ処理を施した車両側データDrが算出される。充電器側データDsの上昇速度の変化に基づいて、充電器側データDsには基準点α1が設定される。同様に、車両側データDrの上昇速度の変化に基づいて、車両側データDrには基準点α2が設定される。そして、充電器と電動車両との間の絶縁不良等を判定する際には、基準点α1,α2に基づいて充電器側データDsと車両側データDrとの間の時間遅れTが算出され、時間遅れTに基づいて同期させた充電器側データDsと車両側データDrとが比較される。
【解決手段】電動車両のバッテリは定電流充電によって充電されている。充電器側の供給電圧Vsにフィルタ処理を施した充電器側データDsが算出され、電動車両側の受給電圧Vrにフィルタ処理を施した車両側データDrが算出される。充電器側データDsの上昇速度の変化に基づいて、充電器側データDsには基準点α1が設定される。同様に、車両側データDrの上昇速度の変化に基づいて、車両側データDrには基準点α2が設定される。そして、充電器と電動車両との間の絶縁不良等を判定する際には、基準点α1,α2に基づいて充電器側データDsと車両側データDrとの間の時間遅れTが算出され、時間遅れTに基づいて同期させた充電器側データDsと車両側データDrとが比較される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、充電システムおよび電動車両に関し、特に、充電器と電動車両との間の通電状態を判定するための技術に関する。
【背景技術】
【0002】
近年、動力源として電動モータを備える電動車両の開発が進められている。電動車両に搭載されるバッテリ等の蓄電デバイスを充電する際には、充電器から伸びる充電ケーブルが電動車両の充電口に接続される(例えば、特許文献1参照)。また、動力源としてエンジンおよび電動モータを備えるハイブリッド型の電動車両においても、充電器によって蓄電デバイスを充電可能とした所謂プラグイン方式のハイブリッド型電動車両が開発されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−83670号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、充電器から電動車両に対する供給電力は高電圧かつ高容量であることから、漏電等を未然に防いで充電時の安全性を確保するためには、絶縁不良や充電ケーブルの断線等を監視する必要がある。絶縁不良等の監視方法としては、充電器側の供給電圧と電動車両側の受給電圧とを比較する方法や、充電器側の供給電流と電動車両側の受給電流とを比較する方法が挙げられる。供給電圧と受給電圧とが大きく乖離している場合や、供給電流と受給電流とが大きく乖離している場合には、電動車両以外にも電力が流れ込んでいることが想定されるため、絶縁不良等が発生していると判定されることになる。
【0005】
このように絶縁不良等を検出する際には、電圧センサや電流センサから出力された電圧データや電流データを用いることになるが、これらのデータを利用する際には、移動平均処理等のフィルタ処理を施してノイズの影響を排除することが一般的である。しかしながら、フィルタ処理後の電圧データや電流データには時間遅れが生じていることから、単に充電器側と電動車両側とで電圧データ等を比較することは、絶縁不良等の誤判定を招く要因となっていた。すなわち、充電器側と電動車両側との遅れ時間に差が生じており、充電器側と電動車両側とのデータが同期していない場合には、絶縁不良等が発生していないにも拘わらず双方のデータが大きく乖離することや、絶縁不良等が発生しているにも拘わらず双方のデータが乖離しないことが考えられる。
【0006】
本発明の目的は、充電器と電動車両との間の通電状態が正常であるか否かを正確に判定することにある。
【課題を解決するための手段】
【0007】
本発明の充電システムは、充電器と電動車両とを充電ケーブルを介して接続し、前記電動車両に搭載される蓄電デバイスを充電する充電システムであって、前記充電器側の供給電圧、供給電流または供給電力に所定のフィルタ処理を施して算出される供給側処理データに対し、前記供給側処理データの変化率に基づいて基準点を設定する第1基準設定手段と、前記電動車両側の受給電圧、受給電流または受給電力に所定のフィルタ処理を施して算出される受給側処理データに対し、前記受給側処理データの変化率に基づいて基準点を設定する第2基準設定手段と、前記供給側処理データと前記受給側処理データとの基準点に基づいて、前記供給側処理データと前記受給側処理データとを同期させるデータ同期手段と、同期させた前記供給側処理データと前記受給側処理データとを比較し、前記充電器と前記電動車両との間の通電状態が正常であるか否かを判定する判定手段とを有することを特徴とする。
【0008】
本発明の充電システムは、前記充電器は、前記供給電流を所定電流まで上昇させてから前記所定電流に保持する定電流充電を実施し、前記第1基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記供給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記供給側処理データに基準点を設定し、前記第2基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記受給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記受給側処理データに基準点を設定することを特徴とする。
【0009】
本発明の充電システムは、前記データ同期手段は、基準点に基づいて前記供給側処理データと前記受給側処理データとの間の時間遅れを算出し、時間遅れに基づいて前記供給側処理データと前記受給側処理データとを同期させることを特徴とする。
【0010】
本発明の電動車両は、充電器が充電ケーブルを介して接続され、前記充電器によって充電される蓄電デバイスを備える電動車両であって、前記充電器側の供給電圧、供給電流または供給電力に所定のフィルタ処理を施して算出される供給側処理データに対し、前記供給側処理データの変化率に基づいて基準点を設定する第1基準設定手段と、前記電動車両側の受給電圧、受給電流または受給電力に所定のフィルタ処理を施して算出される受給側処理データに対し、前記受給側処理データの変化率に基づいて基準点を設定する第2基準設定手段と、前記供給側処理データと前記受給側処理データとの基準点に基づいて、前記供給側処理データと前記受給側処理データとを同期させるデータ同期手段と、同期させた前記供給側処理データと前記受給側処理データとを比較し、前記充電器と前記電動車両との間の通電状態が正常であるか否かを判定する判定手段とを有することを特徴とする。
【0011】
本発明の電動車両は、前記充電器は、前記供給電流を所定電流まで上昇させてから前記所定電流に保持する定電流充電を実施し、前記第1基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記供給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記供給側処理データに基準点を設定し、前記第2基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記受給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記受給側処理データに基準点を設定することを特徴とする。
【0012】
本発明の電動車両は、前記データ同期手段は、基準点に基づいて前記供給側処理データと前記受給側処理データとの間の時間遅れを算出し、時間遅れに基づいて前記供給側処理データと前記受給側処理データとを同期させることを特徴とする。
【発明の効果】
【0013】
本発明によれば、供給側処理データの変化率に基づいて供給側処理データに基準点を設定し、受給側処理データの変化率に基づいて受給側処理データに基準点を設定したので、基準点に基づいて供給側処理データと受給側処理データとを同期させることが可能となる。これにより、供給側処理データと受給側処理データとを適切に比較することができ、充電器と電動車両との間の通電状態が正常であるか否かを正確に判定することが可能となる。
【図面の簡単な説明】
【0014】
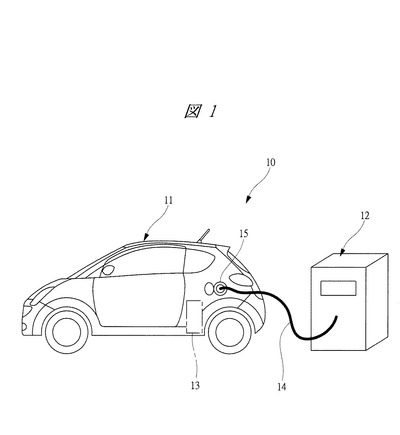
【図1】本発明の一実施の形態である充電システムによる充電状況を示す概略図である。
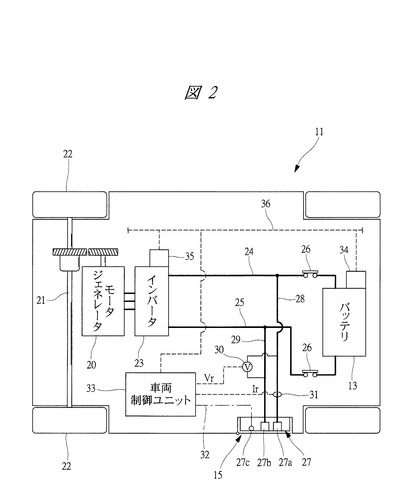
【図2】充電システムを構成する電動車両の内部構造を示す概略図である。
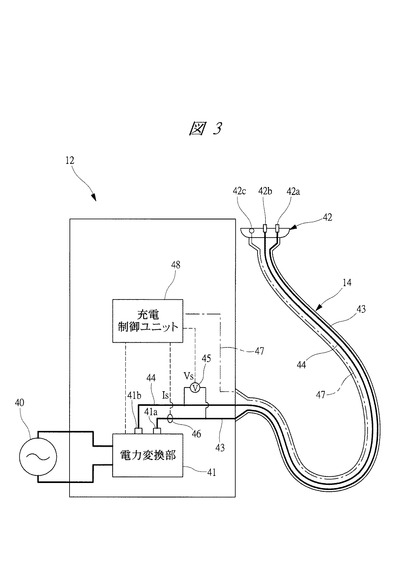
【図3】充電システムを構成する充電器の内部構造を示す概略図である。
【図4】電動車両の充電口に対して充電器の充電ケーブルを接続した状態を示す概略図である。
【図5】(a)〜(c)は充電器と電動車両との間に発生し得る通電異常の一例を示す説明図である。
【図6】フィルタ処理が受給電圧や供給電圧に与える影響を示す説明図である。
【図7】充電時における供給電流、充電器側データおよび車両側データの変動状態を示す線図である。
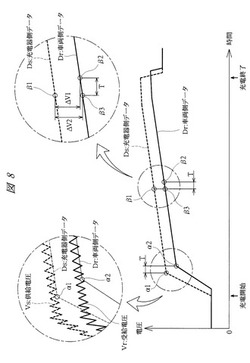
【図8】充電時における充電器側データおよび車両側データの変動状態を示す説明図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態を図面に基づいて詳細に説明する。図1は本発明の一実施の形態である充電システム10による充電状況を示す概略図である。また、図2は充電システム10を構成する電動車両11の内部構造を示す概略図である。さらに、図3は充電システム10を構成する充電器12の内部構造を示す概略図である。図1に示すように、電動車両11には蓄電デバイスとしてバッテリ13が搭載されており、このバッテリ13を充電する際には充電器12の充電ケーブル14が電動車両11の充電口15に接続される。そして、充電器12は、電動車両11に供給する充電電流や充電電圧を制御しながら、所定電圧に達するまでバッテリ13を充電する。なお、充電器12による充電方式としては、一定の電流でバッテリ13を充電する定電流充電、一定の電圧でバッテリ13を充電する定電圧充電、一定の電力でバッテリ13を充電する定電力充電、定電流充電と定電圧充電とをタイマー等で切り換える定電流定電圧充電等がある。
【0016】
図2に示すように、電動車両11は動力源であるモータジェネレータ20を有しており、モータジェネレータ20は駆動軸21を介して駆動輪22に連結されている。また、モータジェネレータ20とバッテリ13とは、直流電力と交流電力とを双方向に変換するインバータ23を介して接続されている。なお、バッテリ13とインバータ23とを接続する通電ライン24,25にはメインリレー26が設けられている。また、車体側部の充電口15には受電コネクタ27が設置されており、受電コネクタ27には一対の受電端子27a,27bが設けられている。一方の受電端子27aは受電ライン28を介して正極側の通電ライン24に接続され、他方の受電端子27bは受電ライン29を介して負極側の通電ライン25に接続されている。また、電動車両11には、受電ライン28,29の電圧つまり受給電圧Vrを検出する電圧センサ30が設けられるとともに、受電ライン28の電流つまり受給電流Irを検出する電流センサ31が設けられている。さらに、受電コネクタ27には信号端子27cが設けられており、この信号端子27cには通信ライン32が接続されている。また、電動車両11には、車両全体を統合制御する車両制御ユニット33、バッテリ13を制御するバッテリ制御ユニット34、インバータ23を制御するモータ制御ユニット35が設けられている。これらの制御ユニット33〜35は、通信ネットワーク36を介して相互に接続されている。なお、各制御ユニット33〜35はCPUやメモリ等によって構成される。
【0017】
図3に示すように、充電器12には、外部電源40からの交流電力を充電用の直流電力に変換する電力変換部41が設けられている。この電力変換部41は、整流回路、変圧器、スイッチング回路等によって構成されている。また、充電器12に設けられる充電ケーブル14の先端には、受電コネクタ27に対して着脱自在となる給電コネクタ42が設けられている。この給電コネクタ42には、受電コネクタ27の受電端子27a,27bに対応する一対の給電端子42a,42bが設けられている。一方の給電端子42aは給電ライン43を介して電力変換部41の正極端子41aに接続され、他方の給電端子42bは給電ライン44を介して電力変換部41の負極端子41bに接続されている。また、充電器12には、給電ライン43,44の電圧つまり供給電圧Vsを検出する電圧センサ45が設けられるとともに、給電ライン43の電流つまり供給電流Isを検出する電流センサ46が設けられている。さらに、給電コネクタ42には信号端子42cが設けられており、この信号端子42cには通信ライン47が接続されている。また、充電器12にはCPUやメモリ等によって構成される充電制御ユニット48が設けられており、充電制御ユニット48から電力変換部41に対して制御信号が出力される。
【0018】
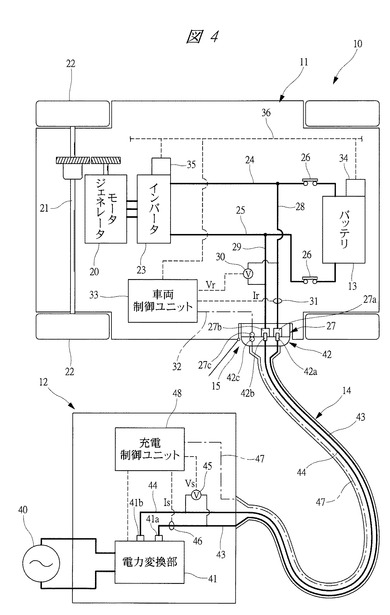
ここで、図4は電動車両11の充電口15に対して充電器12の充電ケーブル14を接続した状態を示す概略図である。図4に示すように、充電口15の受電コネクタ27に充電ケーブル14の給電コネクタ42を接続することにより、給電ライン43,44および受電ライン28,29を介して電力変換部41とバッテリ13とは接続された状態となる。また、充電口15の受電コネクタ27に充電ケーブル14の給電コネクタ42を接続することにより、通信ライン32,47を介して車両制御ユニット33と充電制御ユニット48とは接続された状態となる。このように充電器12と電動車両11とが接続されると、車両制御ユニット33から通信ライン32,47を介して充電制御ユニット48に充電情報が送信される。この充電情報には、電流指令値、電圧指令値、セル温度、充電状態SOC等が含まれている。そして、充電制御ユニット48は、電流指令値に対応する供給電流Isや電圧指令値に対応する供給電圧Vsを得るべく電力変換部41に制御信号を出力し、所定電圧に達するまでバッテリ13を充電する。なお、前述の説明では、電動車両11から充電器12に充電電流等を指示しているが、これに限られることはなく、充電制御ユニット48によって充電電流等を設定しても良い。
【0019】
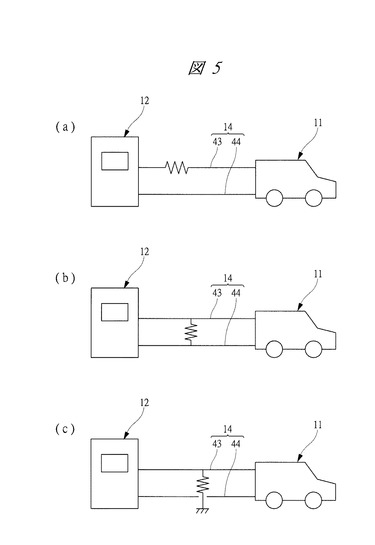
また、充電時においては、充電器12から電動車両11に向けて高電圧かつ高容量の電力(例えばDC400V,100A)が供給されることから、絶縁不良や給電ライン43,44の断線等を監視して漏電や発熱等を未然に防止することが重要である。そこで、車両制御ユニット33は、充電中に受給電圧Vrと供給電圧Vsとを比較しており、受給電圧Vrと供給電圧Vsとが所定量を超えて大きく乖離した場合には、図5(a)に示すような給電ライン43,44の断線やコネクタ27,42の接続不良等が発生していると判定する。また、車両制御ユニット33は、充電中に受給電流Irと供給電流Isとを比較しており、受給電流Irと供給電流Isとが所定量を超えて大きく乖離した場合には、図5(b)および(c)に示すような給電ライン43,44の短絡や地絡等が発生していると判定する。このように、判定手段として機能する車両制御ユニット33は、受給電圧Vrと供給電圧Vsとを比較するとともに、受給電流Irと供給電流Isとを比較することにより、充電器12と電動車両11との間の通電状態が正常であるか否かを判定している。そして、通電状態に異常が認められた場合には、車両制御ユニット33は、充電制御ユニット48に向けて充電中止信号を出力し、充電器12からの電力供給を遮断させる。なお、図5(a)〜(c)は充電器12と電動車両11との間に発生し得る通電異常の一例を示す説明図である。
【0020】
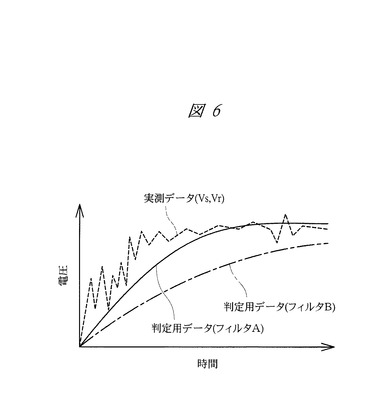
ところで、前述したように通電異常を検出するため、電圧センサ30,45や電流センサ31,46からの受給電圧Vr、供給電圧Vs、受給電流Ir、供給電流Isを利用する際には、移動平均処理や加重平均処理等のフィルタ処理を施してノイズの影響を排除する必要がある。ここで、図6はフィルタ処理が受給電圧Vrや供給電圧Vsに与える影響を示す説明図である。なお、図6にはフィルタ処理が受給電圧Vrや供給電圧Vsに与える影響を示しているが、フィルタ処理は受給電流Irや供給電流Isに対しても同様の影響を与えることになる。図6に示すように、電圧センサ30,45によって検出された実測データにフィルタ処理を施し、実測データからフィルタ処理後の判定用データを加工した場合には、実測データと判定用データとの間に時間的な遅れが発生する。このフィルタ処理に伴う時間的な遅れの長さは、フィルタ処理の内容によって変化するものである。すなわち、電動車両側の受給電圧Vrや受給電流Irに施されるフィルタ処理と、充電器側の供給電圧Vsや供給電流Isに施されるフィルタ処理とが相違している場合には、受給電圧Vrや受給電流Irに基づく車両側データ(受給側処理データ)Drと、供給電圧Vsや供給電流Isに基づく充電器側データ(供給側処理データ)Dsとの間に時間のずれが生じていた。したがって、車両側データDrと充電器側データDsとを比較して絶縁不良や断線等を判定するためには、時間遅れを把握して車両側データDrと充電器側データDsとを同期させた上で比較することが必要となっている。
【0021】
そこで、車両制御ユニット33は、充電時に車両側データDrと充電器側データDsとの間の時間遅れを検出し、この時間遅れに基づいて車両側データDrと充電器側データDsとを同期させる。そして、車両制御ユニット33は、同期させた車両側データDrと充電器側データDsとを比較することにより、充電器12と電動車両11との間の通電状態が正常であるか否かを判定する。なお、本実施の形態においては、車両制御ユニット33によって車両側データDrが算出されており、充電制御ユニット48によって充電器側データDsが算出されている。また、充電制御ユニット48によって算出された充電器側データDsは、通信ライン32,47を介して車両制御ユニット33に送信されている。
【0022】
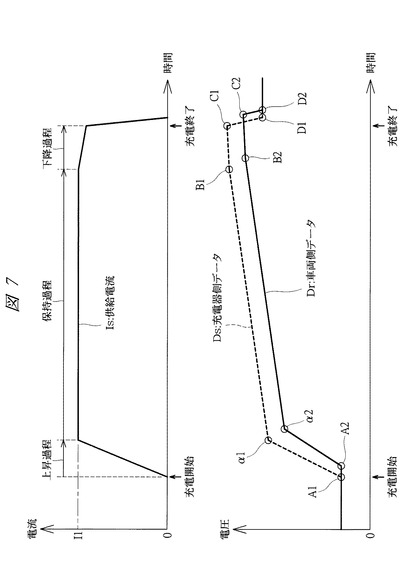
ここで、図7は充電時における供給電流Is、充電器側データDsおよび車両側データDrの変動状態を示す線図である。なお、以下の説明において、充電器側データDsとは供給電圧Vsにフィルタ処理を施したデータであり、車両側データDrとは受給電圧Vrにフィルタ処理を施したデータである。図7に示すように、充電器12は定電流充電によってバッテリ13を充電している。充電器12は、充電開始から所定の上昇速度で所定電流I1まで供給電流Isを上昇させた後に(上昇過程)、供給電圧Vsを引き上げながら供給電流Isが所定電流I1を保持するように調整する(保持過程)。この保持過程は、バッテリ側の受給電圧Vrが所定の目標電圧に達するまで継続される。その後の下降過程において、充電器12は、供給電流Isを徐々に低下させながら、受給電圧Vrが最終的な目標電圧に達するまで充電を継続する。この定電流充電においては、供給電圧Vsおよび受給電圧Vr、つまり充電器側データDsおよび車両側データDrが、上昇過程では第1上昇速度で急速に上昇し、保持過程では第1上昇速度よりも遅い第2上昇速度で緩やかに上昇する。
【0023】
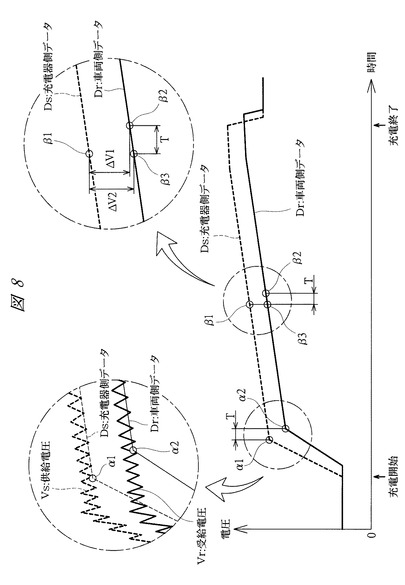
また、図8は充電時における充電器側データDsおよび車両側データDrの変動状態を示す説明図である。なお、図8の説明図は、図7に示した充電器側データDsおよび車両側データDrの線図に説明を付した図である。図8に示すように、第1基準設定手段として機能する車両制御ユニット33は、上昇過程と保持過程とにおける充電器側データDsの上昇速度(変化率)の差に基づいて、上昇過程から保持過程に切り替わる箇所の充電器側データDsに基準点α1を設定する。すなわち、充電器側データDsの上昇速度が所定値を超えて変化した点を基準点α1として設定する。同様に、第2基準設定手段として機能する車両制御ユニット33は、上昇過程と保持過程とにおける車両側データDrの上昇速度(変化率)の差に基づいて、上昇過程から保持過程に切り替わる箇所の車両側データDrに基準点α2を設定する。すなわち、車両側データDrの上昇速度が所定値を超えて変化した点を基準点α2として設定する。なお、供給電圧Vsが計測される給電ライン43,44と、受給電圧Vrが計測される受電ライン28,29とは接続されるため、図8の拡大部分に示すように、供給電圧Vsおよび受給電圧Vrの上昇速度は同じタイミングで変化している。すなわち、供給電圧Vsが基礎となる充電器側データDsの上昇速度と、受給電圧Vrが基礎となる車両側データDrの上昇速度とは、同じタイミングで変化することから、基準点α1,α2は時間的に同じタイミングとなる。
【0024】
このように、充電器側データDsの基準点α1と車両側データDrの基準点α2とは同じタイミングであることから、データ同期手段として機能する車両制御ユニット33は、基準点α1と基準点α2との時間間隔を計測し、フィルタ処理に起因する充電器側データDsと車両側データDrとの時間遅れT(例えば0.5秒)を算出する。そして、絶縁不良や断線等の通電異常を判定する際には、時間遅れTを考慮して充電器側データDs(符号β1)と車両側データDr(符号β2)とが比較される。すなわち、単に同じタイミングでデータ出力された充電器側データDs(符号β1)と車両側データDr(符号β3)とを比較した場合には、充電器側データDsと車両側データDrとが差ΔV2で乖離していると誤判定することになる。これに対し、時間遅れTに基づいて車両側データDrと充電器側データDsとを同期させることにより、充電器側データDs(符号β1)と車両側データDr(符号β2)とを比較することが可能となる。これにより、充電器側データDsと車両側データDrとの差ΔV1を適切に認識することができ、絶縁不良や断線等を正確に判定することが可能となる。
【0025】
また、充電過程における充電器側データDsの上昇速度に基づいて基準点α1を設定し、充電過程における車両側データDrの上昇速度に基づいて基準点α2を設定している。このように、通常の充電過程で現れる上昇速度の変化を利用して基準点α1,α2を設定することから、基準点α1,α2を設定するために供給電圧Vsや供給電流Is等を意図的に変動させる必要がない。すなわち、電動車両11の車両制御ユニット33を、第1基準設定手段、第2基準設定手段、データ同期手段および判定手段として機能させることにより、既存の充電器12の仕様を変更することなく、充電器12と電動車両11との間の通電状態が正常であるか否かを判定することが可能となる。
【0026】
また、前述の説明では、充電器側データDsや車両側データDrの基準点として、上昇過程と保持過程との境界に位置する基準点α1,α2を設定しているが、これに限られることはなく、充電器側データDsや車両側データDrに変化率(変化速度)の変化が現れるタイミングであれば良い。例えば、図7に示すように、充電開始のタイミングを示す基準点A1,A2であっても良く、保持過程と下降過程との境界に位置する基準点B1,B2であっても良い。また、充電終了(電流遮断)のタイミングを示す基準点C1,C2であっても良く、充電終了後に受給電圧Vrおよび供給電圧Vsがバッテリ電圧に収束するタイミングを示す基準点D1,D2であっても良い。さらに、前述の説明では、バッテリ13を定電流充電で充電しているが、これに限られることはなく、バッテリ13を定電圧充電、定電力充電または定電流定電圧充電で充電する際に本発明を適用しても良い。
【0027】
また、前述の説明では、供給電圧Vsにフィルタ処理を施した充電器側データDsと、受給電圧Vrにフィルタ処理を施した車両側データDrとを比較しているが、これに限られることはない。例えば、供給電流Isにフィルタ処理を施した充電器側データDsと、受給電流Irにフィルタ処理を施した車両側データDrとを比較しても良い。また、電動車両側の受給電力Wr(=Ir×Vr)にフィルタ処理を施した車両側データDrと、充電器側の供給電力Ws(=Is×Vs)にフィルタ処理を施した充電器側データDsとを比較しても良い。これらの場合においても、充電器側データDsおよび車両側データDrの上昇速度(変化率)や下降速度(変化率)に基づいて、充電器側データDsおよび車両側データDrに基準点が設定されることになる。
【0028】
本発明は前記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能であることはいうまでもない。前述の説明では、車両制御ユニット33を、第1基準設定手段、第2基準設定手段、データ同期手段および判定手段として機能させているが、これに限られることはない。例えば、第1基準設定手段、第2基準設定手段、データ同期手段および判定手段の各手段を、充電制御ユニット48と車両制御ユニット33との一方に集約しても良く、充電制御ユニット48と車両制御ユニット33との双方に分散させても良い。なお、前述の説明では、車両制御ユニット33が車両側データDrを算出しているが、充電制御ユニット48に車両側データDrを算出させる場合には、通信ライン32,47を介して充電制御ユニット48に受給電圧Vr、受給電流Irまたは受給電力Wrが送信される。同様に、充電制御ユニット48が充電器側データDsを算出しているが、車両制御ユニット33に充電器側データDsを算出させる場合には、通信ライン32,47を介して車両制御ユニット33に供給電圧Vs、供給電流Isまたは供給電力Wsが送信される。
【0029】
また、車両側データDrを算出する際のフィルタ処理や、充電器側データDsを算出する際のフィルタ処理としては、移動平均処理や加重平均処理が挙げられるが、これらの処理方法に限られるものではない。また、電気回路を用いてハードウェア的にフィルタ処理を施しても良く、プログラムを用いてソフトウェア的にフィルタ処理を施しても良い。また、図示する電動車両11は、駆動源としてモータジェネレータ20のみを備えた電動車両11であるが、駆動源としてモータジェネレータ20およびエンジンを備えたハイブリッド型の電動車両であっても良い。また、蓄電デバイスとして、リチウムイオン二次電池やニッケル水素二次電池等のバッテリ13を採用しているが、これに限られることはなく、蓄電デバイスとして、リチウムイオンキャパシタや電気二重層キャパシタ等のキャパシタを用いても良い。なお、前述の説明では、充電ケーブル14に接触式の給電コネクタ42を備えたコンダクティブ方式の充電器12を用いているが、これに限られることはなく、充電ケーブルに非接触式の給電コネクタを備えたインダクティブ方式の充電器を用いても良い。
【符号の説明】
【0030】
10 充電システム
11 電動車両
12 充電器
13 バッテリ(蓄電デバイス)
14 充電ケーブル
33 車両制御ユニット(第1基準設定手段,第2基準設定手段,データ同期手段,判定手段)
Vs 供給電圧
Vr 受給電圧
Is 供給電流
Ir 受給電流
I1 所定電流
Ws 供給電力
Wr 受給電力
Ds 充電器側データ(供給側処理データ)
Dr 車両側データ(受給側処理データ)
α1,α2 基準点
T 時間遅れ
【技術分野】
【0001】
本発明は、充電システムおよび電動車両に関し、特に、充電器と電動車両との間の通電状態を判定するための技術に関する。
【背景技術】
【0002】
近年、動力源として電動モータを備える電動車両の開発が進められている。電動車両に搭載されるバッテリ等の蓄電デバイスを充電する際には、充電器から伸びる充電ケーブルが電動車両の充電口に接続される(例えば、特許文献1参照)。また、動力源としてエンジンおよび電動モータを備えるハイブリッド型の電動車両においても、充電器によって蓄電デバイスを充電可能とした所謂プラグイン方式のハイブリッド型電動車両が開発されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−83670号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、充電器から電動車両に対する供給電力は高電圧かつ高容量であることから、漏電等を未然に防いで充電時の安全性を確保するためには、絶縁不良や充電ケーブルの断線等を監視する必要がある。絶縁不良等の監視方法としては、充電器側の供給電圧と電動車両側の受給電圧とを比較する方法や、充電器側の供給電流と電動車両側の受給電流とを比較する方法が挙げられる。供給電圧と受給電圧とが大きく乖離している場合や、供給電流と受給電流とが大きく乖離している場合には、電動車両以外にも電力が流れ込んでいることが想定されるため、絶縁不良等が発生していると判定されることになる。
【0005】
このように絶縁不良等を検出する際には、電圧センサや電流センサから出力された電圧データや電流データを用いることになるが、これらのデータを利用する際には、移動平均処理等のフィルタ処理を施してノイズの影響を排除することが一般的である。しかしながら、フィルタ処理後の電圧データや電流データには時間遅れが生じていることから、単に充電器側と電動車両側とで電圧データ等を比較することは、絶縁不良等の誤判定を招く要因となっていた。すなわち、充電器側と電動車両側との遅れ時間に差が生じており、充電器側と電動車両側とのデータが同期していない場合には、絶縁不良等が発生していないにも拘わらず双方のデータが大きく乖離することや、絶縁不良等が発生しているにも拘わらず双方のデータが乖離しないことが考えられる。
【0006】
本発明の目的は、充電器と電動車両との間の通電状態が正常であるか否かを正確に判定することにある。
【課題を解決するための手段】
【0007】
本発明の充電システムは、充電器と電動車両とを充電ケーブルを介して接続し、前記電動車両に搭載される蓄電デバイスを充電する充電システムであって、前記充電器側の供給電圧、供給電流または供給電力に所定のフィルタ処理を施して算出される供給側処理データに対し、前記供給側処理データの変化率に基づいて基準点を設定する第1基準設定手段と、前記電動車両側の受給電圧、受給電流または受給電力に所定のフィルタ処理を施して算出される受給側処理データに対し、前記受給側処理データの変化率に基づいて基準点を設定する第2基準設定手段と、前記供給側処理データと前記受給側処理データとの基準点に基づいて、前記供給側処理データと前記受給側処理データとを同期させるデータ同期手段と、同期させた前記供給側処理データと前記受給側処理データとを比較し、前記充電器と前記電動車両との間の通電状態が正常であるか否かを判定する判定手段とを有することを特徴とする。
【0008】
本発明の充電システムは、前記充電器は、前記供給電流を所定電流まで上昇させてから前記所定電流に保持する定電流充電を実施し、前記第1基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記供給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記供給側処理データに基準点を設定し、前記第2基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記受給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記受給側処理データに基準点を設定することを特徴とする。
【0009】
本発明の充電システムは、前記データ同期手段は、基準点に基づいて前記供給側処理データと前記受給側処理データとの間の時間遅れを算出し、時間遅れに基づいて前記供給側処理データと前記受給側処理データとを同期させることを特徴とする。
【0010】
本発明の電動車両は、充電器が充電ケーブルを介して接続され、前記充電器によって充電される蓄電デバイスを備える電動車両であって、前記充電器側の供給電圧、供給電流または供給電力に所定のフィルタ処理を施して算出される供給側処理データに対し、前記供給側処理データの変化率に基づいて基準点を設定する第1基準設定手段と、前記電動車両側の受給電圧、受給電流または受給電力に所定のフィルタ処理を施して算出される受給側処理データに対し、前記受給側処理データの変化率に基づいて基準点を設定する第2基準設定手段と、前記供給側処理データと前記受給側処理データとの基準点に基づいて、前記供給側処理データと前記受給側処理データとを同期させるデータ同期手段と、同期させた前記供給側処理データと前記受給側処理データとを比較し、前記充電器と前記電動車両との間の通電状態が正常であるか否かを判定する判定手段とを有することを特徴とする。
【0011】
本発明の電動車両は、前記充電器は、前記供給電流を所定電流まで上昇させてから前記所定電流に保持する定電流充電を実施し、前記第1基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記供給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記供給側処理データに基準点を設定し、前記第2基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記受給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記受給側処理データに基準点を設定することを特徴とする。
【0012】
本発明の電動車両は、前記データ同期手段は、基準点に基づいて前記供給側処理データと前記受給側処理データとの間の時間遅れを算出し、時間遅れに基づいて前記供給側処理データと前記受給側処理データとを同期させることを特徴とする。
【発明の効果】
【0013】
本発明によれば、供給側処理データの変化率に基づいて供給側処理データに基準点を設定し、受給側処理データの変化率に基づいて受給側処理データに基準点を設定したので、基準点に基づいて供給側処理データと受給側処理データとを同期させることが可能となる。これにより、供給側処理データと受給側処理データとを適切に比較することができ、充電器と電動車両との間の通電状態が正常であるか否かを正確に判定することが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施の形態である充電システムによる充電状況を示す概略図である。
【図2】充電システムを構成する電動車両の内部構造を示す概略図である。
【図3】充電システムを構成する充電器の内部構造を示す概略図である。
【図4】電動車両の充電口に対して充電器の充電ケーブルを接続した状態を示す概略図である。
【図5】(a)〜(c)は充電器と電動車両との間に発生し得る通電異常の一例を示す説明図である。
【図6】フィルタ処理が受給電圧や供給電圧に与える影響を示す説明図である。
【図7】充電時における供給電流、充電器側データおよび車両側データの変動状態を示す線図である。
【図8】充電時における充電器側データおよび車両側データの変動状態を示す説明図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態を図面に基づいて詳細に説明する。図1は本発明の一実施の形態である充電システム10による充電状況を示す概略図である。また、図2は充電システム10を構成する電動車両11の内部構造を示す概略図である。さらに、図3は充電システム10を構成する充電器12の内部構造を示す概略図である。図1に示すように、電動車両11には蓄電デバイスとしてバッテリ13が搭載されており、このバッテリ13を充電する際には充電器12の充電ケーブル14が電動車両11の充電口15に接続される。そして、充電器12は、電動車両11に供給する充電電流や充電電圧を制御しながら、所定電圧に達するまでバッテリ13を充電する。なお、充電器12による充電方式としては、一定の電流でバッテリ13を充電する定電流充電、一定の電圧でバッテリ13を充電する定電圧充電、一定の電力でバッテリ13を充電する定電力充電、定電流充電と定電圧充電とをタイマー等で切り換える定電流定電圧充電等がある。
【0016】
図2に示すように、電動車両11は動力源であるモータジェネレータ20を有しており、モータジェネレータ20は駆動軸21を介して駆動輪22に連結されている。また、モータジェネレータ20とバッテリ13とは、直流電力と交流電力とを双方向に変換するインバータ23を介して接続されている。なお、バッテリ13とインバータ23とを接続する通電ライン24,25にはメインリレー26が設けられている。また、車体側部の充電口15には受電コネクタ27が設置されており、受電コネクタ27には一対の受電端子27a,27bが設けられている。一方の受電端子27aは受電ライン28を介して正極側の通電ライン24に接続され、他方の受電端子27bは受電ライン29を介して負極側の通電ライン25に接続されている。また、電動車両11には、受電ライン28,29の電圧つまり受給電圧Vrを検出する電圧センサ30が設けられるとともに、受電ライン28の電流つまり受給電流Irを検出する電流センサ31が設けられている。さらに、受電コネクタ27には信号端子27cが設けられており、この信号端子27cには通信ライン32が接続されている。また、電動車両11には、車両全体を統合制御する車両制御ユニット33、バッテリ13を制御するバッテリ制御ユニット34、インバータ23を制御するモータ制御ユニット35が設けられている。これらの制御ユニット33〜35は、通信ネットワーク36を介して相互に接続されている。なお、各制御ユニット33〜35はCPUやメモリ等によって構成される。
【0017】
図3に示すように、充電器12には、外部電源40からの交流電力を充電用の直流電力に変換する電力変換部41が設けられている。この電力変換部41は、整流回路、変圧器、スイッチング回路等によって構成されている。また、充電器12に設けられる充電ケーブル14の先端には、受電コネクタ27に対して着脱自在となる給電コネクタ42が設けられている。この給電コネクタ42には、受電コネクタ27の受電端子27a,27bに対応する一対の給電端子42a,42bが設けられている。一方の給電端子42aは給電ライン43を介して電力変換部41の正極端子41aに接続され、他方の給電端子42bは給電ライン44を介して電力変換部41の負極端子41bに接続されている。また、充電器12には、給電ライン43,44の電圧つまり供給電圧Vsを検出する電圧センサ45が設けられるとともに、給電ライン43の電流つまり供給電流Isを検出する電流センサ46が設けられている。さらに、給電コネクタ42には信号端子42cが設けられており、この信号端子42cには通信ライン47が接続されている。また、充電器12にはCPUやメモリ等によって構成される充電制御ユニット48が設けられており、充電制御ユニット48から電力変換部41に対して制御信号が出力される。
【0018】
ここで、図4は電動車両11の充電口15に対して充電器12の充電ケーブル14を接続した状態を示す概略図である。図4に示すように、充電口15の受電コネクタ27に充電ケーブル14の給電コネクタ42を接続することにより、給電ライン43,44および受電ライン28,29を介して電力変換部41とバッテリ13とは接続された状態となる。また、充電口15の受電コネクタ27に充電ケーブル14の給電コネクタ42を接続することにより、通信ライン32,47を介して車両制御ユニット33と充電制御ユニット48とは接続された状態となる。このように充電器12と電動車両11とが接続されると、車両制御ユニット33から通信ライン32,47を介して充電制御ユニット48に充電情報が送信される。この充電情報には、電流指令値、電圧指令値、セル温度、充電状態SOC等が含まれている。そして、充電制御ユニット48は、電流指令値に対応する供給電流Isや電圧指令値に対応する供給電圧Vsを得るべく電力変換部41に制御信号を出力し、所定電圧に達するまでバッテリ13を充電する。なお、前述の説明では、電動車両11から充電器12に充電電流等を指示しているが、これに限られることはなく、充電制御ユニット48によって充電電流等を設定しても良い。
【0019】
また、充電時においては、充電器12から電動車両11に向けて高電圧かつ高容量の電力(例えばDC400V,100A)が供給されることから、絶縁不良や給電ライン43,44の断線等を監視して漏電や発熱等を未然に防止することが重要である。そこで、車両制御ユニット33は、充電中に受給電圧Vrと供給電圧Vsとを比較しており、受給電圧Vrと供給電圧Vsとが所定量を超えて大きく乖離した場合には、図5(a)に示すような給電ライン43,44の断線やコネクタ27,42の接続不良等が発生していると判定する。また、車両制御ユニット33は、充電中に受給電流Irと供給電流Isとを比較しており、受給電流Irと供給電流Isとが所定量を超えて大きく乖離した場合には、図5(b)および(c)に示すような給電ライン43,44の短絡や地絡等が発生していると判定する。このように、判定手段として機能する車両制御ユニット33は、受給電圧Vrと供給電圧Vsとを比較するとともに、受給電流Irと供給電流Isとを比較することにより、充電器12と電動車両11との間の通電状態が正常であるか否かを判定している。そして、通電状態に異常が認められた場合には、車両制御ユニット33は、充電制御ユニット48に向けて充電中止信号を出力し、充電器12からの電力供給を遮断させる。なお、図5(a)〜(c)は充電器12と電動車両11との間に発生し得る通電異常の一例を示す説明図である。
【0020】
ところで、前述したように通電異常を検出するため、電圧センサ30,45や電流センサ31,46からの受給電圧Vr、供給電圧Vs、受給電流Ir、供給電流Isを利用する際には、移動平均処理や加重平均処理等のフィルタ処理を施してノイズの影響を排除する必要がある。ここで、図6はフィルタ処理が受給電圧Vrや供給電圧Vsに与える影響を示す説明図である。なお、図6にはフィルタ処理が受給電圧Vrや供給電圧Vsに与える影響を示しているが、フィルタ処理は受給電流Irや供給電流Isに対しても同様の影響を与えることになる。図6に示すように、電圧センサ30,45によって検出された実測データにフィルタ処理を施し、実測データからフィルタ処理後の判定用データを加工した場合には、実測データと判定用データとの間に時間的な遅れが発生する。このフィルタ処理に伴う時間的な遅れの長さは、フィルタ処理の内容によって変化するものである。すなわち、電動車両側の受給電圧Vrや受給電流Irに施されるフィルタ処理と、充電器側の供給電圧Vsや供給電流Isに施されるフィルタ処理とが相違している場合には、受給電圧Vrや受給電流Irに基づく車両側データ(受給側処理データ)Drと、供給電圧Vsや供給電流Isに基づく充電器側データ(供給側処理データ)Dsとの間に時間のずれが生じていた。したがって、車両側データDrと充電器側データDsとを比較して絶縁不良や断線等を判定するためには、時間遅れを把握して車両側データDrと充電器側データDsとを同期させた上で比較することが必要となっている。
【0021】
そこで、車両制御ユニット33は、充電時に車両側データDrと充電器側データDsとの間の時間遅れを検出し、この時間遅れに基づいて車両側データDrと充電器側データDsとを同期させる。そして、車両制御ユニット33は、同期させた車両側データDrと充電器側データDsとを比較することにより、充電器12と電動車両11との間の通電状態が正常であるか否かを判定する。なお、本実施の形態においては、車両制御ユニット33によって車両側データDrが算出されており、充電制御ユニット48によって充電器側データDsが算出されている。また、充電制御ユニット48によって算出された充電器側データDsは、通信ライン32,47を介して車両制御ユニット33に送信されている。
【0022】
ここで、図7は充電時における供給電流Is、充電器側データDsおよび車両側データDrの変動状態を示す線図である。なお、以下の説明において、充電器側データDsとは供給電圧Vsにフィルタ処理を施したデータであり、車両側データDrとは受給電圧Vrにフィルタ処理を施したデータである。図7に示すように、充電器12は定電流充電によってバッテリ13を充電している。充電器12は、充電開始から所定の上昇速度で所定電流I1まで供給電流Isを上昇させた後に(上昇過程)、供給電圧Vsを引き上げながら供給電流Isが所定電流I1を保持するように調整する(保持過程)。この保持過程は、バッテリ側の受給電圧Vrが所定の目標電圧に達するまで継続される。その後の下降過程において、充電器12は、供給電流Isを徐々に低下させながら、受給電圧Vrが最終的な目標電圧に達するまで充電を継続する。この定電流充電においては、供給電圧Vsおよび受給電圧Vr、つまり充電器側データDsおよび車両側データDrが、上昇過程では第1上昇速度で急速に上昇し、保持過程では第1上昇速度よりも遅い第2上昇速度で緩やかに上昇する。
【0023】
また、図8は充電時における充電器側データDsおよび車両側データDrの変動状態を示す説明図である。なお、図8の説明図は、図7に示した充電器側データDsおよび車両側データDrの線図に説明を付した図である。図8に示すように、第1基準設定手段として機能する車両制御ユニット33は、上昇過程と保持過程とにおける充電器側データDsの上昇速度(変化率)の差に基づいて、上昇過程から保持過程に切り替わる箇所の充電器側データDsに基準点α1を設定する。すなわち、充電器側データDsの上昇速度が所定値を超えて変化した点を基準点α1として設定する。同様に、第2基準設定手段として機能する車両制御ユニット33は、上昇過程と保持過程とにおける車両側データDrの上昇速度(変化率)の差に基づいて、上昇過程から保持過程に切り替わる箇所の車両側データDrに基準点α2を設定する。すなわち、車両側データDrの上昇速度が所定値を超えて変化した点を基準点α2として設定する。なお、供給電圧Vsが計測される給電ライン43,44と、受給電圧Vrが計測される受電ライン28,29とは接続されるため、図8の拡大部分に示すように、供給電圧Vsおよび受給電圧Vrの上昇速度は同じタイミングで変化している。すなわち、供給電圧Vsが基礎となる充電器側データDsの上昇速度と、受給電圧Vrが基礎となる車両側データDrの上昇速度とは、同じタイミングで変化することから、基準点α1,α2は時間的に同じタイミングとなる。
【0024】
このように、充電器側データDsの基準点α1と車両側データDrの基準点α2とは同じタイミングであることから、データ同期手段として機能する車両制御ユニット33は、基準点α1と基準点α2との時間間隔を計測し、フィルタ処理に起因する充電器側データDsと車両側データDrとの時間遅れT(例えば0.5秒)を算出する。そして、絶縁不良や断線等の通電異常を判定する際には、時間遅れTを考慮して充電器側データDs(符号β1)と車両側データDr(符号β2)とが比較される。すなわち、単に同じタイミングでデータ出力された充電器側データDs(符号β1)と車両側データDr(符号β3)とを比較した場合には、充電器側データDsと車両側データDrとが差ΔV2で乖離していると誤判定することになる。これに対し、時間遅れTに基づいて車両側データDrと充電器側データDsとを同期させることにより、充電器側データDs(符号β1)と車両側データDr(符号β2)とを比較することが可能となる。これにより、充電器側データDsと車両側データDrとの差ΔV1を適切に認識することができ、絶縁不良や断線等を正確に判定することが可能となる。
【0025】
また、充電過程における充電器側データDsの上昇速度に基づいて基準点α1を設定し、充電過程における車両側データDrの上昇速度に基づいて基準点α2を設定している。このように、通常の充電過程で現れる上昇速度の変化を利用して基準点α1,α2を設定することから、基準点α1,α2を設定するために供給電圧Vsや供給電流Is等を意図的に変動させる必要がない。すなわち、電動車両11の車両制御ユニット33を、第1基準設定手段、第2基準設定手段、データ同期手段および判定手段として機能させることにより、既存の充電器12の仕様を変更することなく、充電器12と電動車両11との間の通電状態が正常であるか否かを判定することが可能となる。
【0026】
また、前述の説明では、充電器側データDsや車両側データDrの基準点として、上昇過程と保持過程との境界に位置する基準点α1,α2を設定しているが、これに限られることはなく、充電器側データDsや車両側データDrに変化率(変化速度)の変化が現れるタイミングであれば良い。例えば、図7に示すように、充電開始のタイミングを示す基準点A1,A2であっても良く、保持過程と下降過程との境界に位置する基準点B1,B2であっても良い。また、充電終了(電流遮断)のタイミングを示す基準点C1,C2であっても良く、充電終了後に受給電圧Vrおよび供給電圧Vsがバッテリ電圧に収束するタイミングを示す基準点D1,D2であっても良い。さらに、前述の説明では、バッテリ13を定電流充電で充電しているが、これに限られることはなく、バッテリ13を定電圧充電、定電力充電または定電流定電圧充電で充電する際に本発明を適用しても良い。
【0027】
また、前述の説明では、供給電圧Vsにフィルタ処理を施した充電器側データDsと、受給電圧Vrにフィルタ処理を施した車両側データDrとを比較しているが、これに限られることはない。例えば、供給電流Isにフィルタ処理を施した充電器側データDsと、受給電流Irにフィルタ処理を施した車両側データDrとを比較しても良い。また、電動車両側の受給電力Wr(=Ir×Vr)にフィルタ処理を施した車両側データDrと、充電器側の供給電力Ws(=Is×Vs)にフィルタ処理を施した充電器側データDsとを比較しても良い。これらの場合においても、充電器側データDsおよび車両側データDrの上昇速度(変化率)や下降速度(変化率)に基づいて、充電器側データDsおよび車両側データDrに基準点が設定されることになる。
【0028】
本発明は前記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能であることはいうまでもない。前述の説明では、車両制御ユニット33を、第1基準設定手段、第2基準設定手段、データ同期手段および判定手段として機能させているが、これに限られることはない。例えば、第1基準設定手段、第2基準設定手段、データ同期手段および判定手段の各手段を、充電制御ユニット48と車両制御ユニット33との一方に集約しても良く、充電制御ユニット48と車両制御ユニット33との双方に分散させても良い。なお、前述の説明では、車両制御ユニット33が車両側データDrを算出しているが、充電制御ユニット48に車両側データDrを算出させる場合には、通信ライン32,47を介して充電制御ユニット48に受給電圧Vr、受給電流Irまたは受給電力Wrが送信される。同様に、充電制御ユニット48が充電器側データDsを算出しているが、車両制御ユニット33に充電器側データDsを算出させる場合には、通信ライン32,47を介して車両制御ユニット33に供給電圧Vs、供給電流Isまたは供給電力Wsが送信される。
【0029】
また、車両側データDrを算出する際のフィルタ処理や、充電器側データDsを算出する際のフィルタ処理としては、移動平均処理や加重平均処理が挙げられるが、これらの処理方法に限られるものではない。また、電気回路を用いてハードウェア的にフィルタ処理を施しても良く、プログラムを用いてソフトウェア的にフィルタ処理を施しても良い。また、図示する電動車両11は、駆動源としてモータジェネレータ20のみを備えた電動車両11であるが、駆動源としてモータジェネレータ20およびエンジンを備えたハイブリッド型の電動車両であっても良い。また、蓄電デバイスとして、リチウムイオン二次電池やニッケル水素二次電池等のバッテリ13を採用しているが、これに限られることはなく、蓄電デバイスとして、リチウムイオンキャパシタや電気二重層キャパシタ等のキャパシタを用いても良い。なお、前述の説明では、充電ケーブル14に接触式の給電コネクタ42を備えたコンダクティブ方式の充電器12を用いているが、これに限られることはなく、充電ケーブルに非接触式の給電コネクタを備えたインダクティブ方式の充電器を用いても良い。
【符号の説明】
【0030】
10 充電システム
11 電動車両
12 充電器
13 バッテリ(蓄電デバイス)
14 充電ケーブル
33 車両制御ユニット(第1基準設定手段,第2基準設定手段,データ同期手段,判定手段)
Vs 供給電圧
Vr 受給電圧
Is 供給電流
Ir 受給電流
I1 所定電流
Ws 供給電力
Wr 受給電力
Ds 充電器側データ(供給側処理データ)
Dr 車両側データ(受給側処理データ)
α1,α2 基準点
T 時間遅れ
【特許請求の範囲】
【請求項1】
充電器と電動車両とを充電ケーブルを介して接続し、前記電動車両に搭載される蓄電デバイスを充電する充電システムであって、
前記充電器側の供給電圧、供給電流または供給電力に所定のフィルタ処理を施して算出される供給側処理データに対し、前記供給側処理データの変化率に基づいて基準点を設定する第1基準設定手段と、
前記電動車両側の受給電圧、受給電流または受給電力に所定のフィルタ処理を施して算出される受給側処理データに対し、前記受給側処理データの変化率に基づいて基準点を設定する第2基準設定手段と、
前記供給側処理データと前記受給側処理データとの基準点に基づいて、前記供給側処理データと前記受給側処理データとを同期させるデータ同期手段と、
同期させた前記供給側処理データと前記受給側処理データとを比較し、前記充電器と前記電動車両との間の通電状態が正常であるか否かを判定する判定手段とを有することを特徴とする充電システム。
【請求項2】
請求項1記載の充電システムにおいて、
前記充電器は、前記供給電流を所定電流まで上昇させてから前記所定電流に保持する定電流充電を実施し、
前記第1基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記供給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記供給側処理データに基準点を設定し、
前記第2基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記受給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記受給側処理データに基準点を設定することを特徴とする充電システム。
【請求項3】
請求項1または2記載の充電システムにおいて、
前記データ同期手段は、基準点に基づいて前記供給側処理データと前記受給側処理データとの間の時間遅れを算出し、時間遅れに基づいて前記供給側処理データと前記受給側処理データとを同期させることを特徴とする充電システム。
【請求項4】
充電器が充電ケーブルを介して接続され、前記充電器によって充電される蓄電デバイスを備える電動車両であって、
前記充電器側の供給電圧、供給電流または供給電力に所定のフィルタ処理を施して算出される供給側処理データに対し、前記供給側処理データの変化率に基づいて基準点を設定する第1基準設定手段と、
前記電動車両側の受給電圧、受給電流または受給電力に所定のフィルタ処理を施して算出される受給側処理データに対し、前記受給側処理データの変化率に基づいて基準点を設定する第2基準設定手段と、
前記供給側処理データと前記受給側処理データとの基準点に基づいて、前記供給側処理データと前記受給側処理データとを同期させるデータ同期手段と、
同期させた前記供給側処理データと前記受給側処理データとを比較し、前記充電器と前記電動車両との間の通電状態が正常であるか否かを判定する判定手段とを有することを特徴とする電動車両。
【請求項5】
請求項4記載の電動車両において、
前記充電器は、前記供給電流を所定電流まで上昇させてから前記所定電流に保持する定電流充電を実施し、
前記第1基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記供給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記供給側処理データに基準点を設定し、
前記第2基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記受給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記受給側処理データに基準点を設定することを特徴とする電動車両。
【請求項6】
請求項4または5記載の電動車両において、
前記データ同期手段は、基準点に基づいて前記供給側処理データと前記受給側処理データとの間の時間遅れを算出し、時間遅れに基づいて前記供給側処理データと前記受給側処理データとを同期させることを特徴とする電動車両。
【請求項1】
充電器と電動車両とを充電ケーブルを介して接続し、前記電動車両に搭載される蓄電デバイスを充電する充電システムであって、
前記充電器側の供給電圧、供給電流または供給電力に所定のフィルタ処理を施して算出される供給側処理データに対し、前記供給側処理データの変化率に基づいて基準点を設定する第1基準設定手段と、
前記電動車両側の受給電圧、受給電流または受給電力に所定のフィルタ処理を施して算出される受給側処理データに対し、前記受給側処理データの変化率に基づいて基準点を設定する第2基準設定手段と、
前記供給側処理データと前記受給側処理データとの基準点に基づいて、前記供給側処理データと前記受給側処理データとを同期させるデータ同期手段と、
同期させた前記供給側処理データと前記受給側処理データとを比較し、前記充電器と前記電動車両との間の通電状態が正常であるか否かを判定する判定手段とを有することを特徴とする充電システム。
【請求項2】
請求項1記載の充電システムにおいて、
前記充電器は、前記供給電流を所定電流まで上昇させてから前記所定電流に保持する定電流充電を実施し、
前記第1基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記供給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記供給側処理データに基準点を設定し、
前記第2基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記受給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記受給側処理データに基準点を設定することを特徴とする充電システム。
【請求項3】
請求項1または2記載の充電システムにおいて、
前記データ同期手段は、基準点に基づいて前記供給側処理データと前記受給側処理データとの間の時間遅れを算出し、時間遅れに基づいて前記供給側処理データと前記受給側処理データとを同期させることを特徴とする充電システム。
【請求項4】
充電器が充電ケーブルを介して接続され、前記充電器によって充電される蓄電デバイスを備える電動車両であって、
前記充電器側の供給電圧、供給電流または供給電力に所定のフィルタ処理を施して算出される供給側処理データに対し、前記供給側処理データの変化率に基づいて基準点を設定する第1基準設定手段と、
前記電動車両側の受給電圧、受給電流または受給電力に所定のフィルタ処理を施して算出される受給側処理データに対し、前記受給側処理データの変化率に基づいて基準点を設定する第2基準設定手段と、
前記供給側処理データと前記受給側処理データとの基準点に基づいて、前記供給側処理データと前記受給側処理データとを同期させるデータ同期手段と、
同期させた前記供給側処理データと前記受給側処理データとを比較し、前記充電器と前記電動車両との間の通電状態が正常であるか否かを判定する判定手段とを有することを特徴とする電動車両。
【請求項5】
請求項4記載の電動車両において、
前記充電器は、前記供給電流を所定電流まで上昇させてから前記所定電流に保持する定電流充電を実施し、
前記第1基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記供給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記供給側処理データに基準点を設定し、
前記第2基準設定手段は、前記供給電流の上昇過程と保持過程とにおける前記受給側処理データの変化率の差を検出し、上昇過程から保持過程に切り替わる箇所の前記受給側処理データに基準点を設定することを特徴とする電動車両。
【請求項6】
請求項4または5記載の電動車両において、
前記データ同期手段は、基準点に基づいて前記供給側処理データと前記受給側処理データとの間の時間遅れを算出し、時間遅れに基づいて前記供給側処理データと前記受給側処理データとを同期させることを特徴とする電動車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−108793(P2013−108793A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−252774(P2011−252774)
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
[ Back to top ]