
充電器検定装置および移動体模擬装置

【課題】データの同時収集およびデータの同時出力を確保しながら、短時間で検定を可能にする充電器検定装置を提供する。
【解決手段】移動体模擬装置と、移動体模擬装置の制御ユニットおよびデータ収集ユニットに接続された制御処理装置とを備える。制御処理装置は、移動体模擬装置の制御ユニットに、パラメータを設定し、設定されたパラメータに従って実行された、充電器に対する移動体の模擬シーケンスが終了したときに、データ収集ユニットが収集したデータに基づいて、充電器の充電シーケンスの応答タイミングが、所定の基準に適合しているか否かを検定し、検定結果を表形式で表示出力する。
【解決手段】移動体模擬装置と、移動体模擬装置の制御ユニットおよびデータ収集ユニットに接続された制御処理装置とを備える。制御処理装置は、移動体模擬装置の制御ユニットに、パラメータを設定し、設定されたパラメータに従って実行された、充電器に対する移動体の模擬シーケンスが終了したときに、データ収集ユニットが収集したデータに基づいて、充電器の充電シーケンスの応答タイミングが、所定の基準に適合しているか否かを検定し、検定結果を表形式で表示出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体に搭載される電池を直流充電する充電器が基準に適合するか否かを検定するとともに、データを表示出力する充電器検定装置、および充電器検定装置に含まれる移動体模擬装置に関する。
【背景技術】
【0002】
充電器が、モータなどの電動機による駆動機構を含む移動体(以下、単に、移動体という)、例えば電気自動車の車載電池を充電する場合、
(1)充電器の給電ケーブルと電気自動車とがコネクタで接続され、充電器の充電開始ボタンが押されると、充電器から電気自動車へ制御信号を出力し、充電器に接続されたことが電気自動車に通知され、
(2)電気自動車は、充電器に接続されたことを通知されると、電気自動車から充電器へ通信を開始し、電気自動車に接続されたことが充電器に通知され、
(3)充電器から電気自動車へ通信を開始し、
(4)電気自動車は、充電可能であることを充電器に通知し、
(5)充電器は、充電電流を送る直流電源ラインの絶縁確認を行い、
(6)絶縁確認終了後、充電器から電気自動車へ制御信号を送信し、充電器が充電可能状態になったことを電気自動車に通知し、
(7)電気自動車は充電リレーをオンし、充電器を車載電池に接続し、
(8)電気自動車は、充電電流指令値を充電器に通知し、
(9)充電器は、通知された充電電流指令値に従って、充電電流を流す。
【0003】
このように、充電器は、電気自動車との間で、信号ラインを経て相互に通信しながら、車載電池に充電電流を供給し充電している。
【0004】
充電器は、所定の基準である充電方式、例えばCHAdeMO方式仕様に適合するように製作される。製作された充電器は、出荷前に、CHAdeMO方式仕様に従って充電シーケンスを実行しているか否かの検定が行われる。
【0005】
実車両が無い状態で充電器の充電シーケンスを確認するためには、充電器に対する車両のシーケンスを模擬する車両模擬装置を、用意する必要がある。
【0006】
従来の車両模擬装置では、直流電源ラインに切換接続可能な直流電源および抵抗負荷を用いて、車載電池を模擬している。直流電源は、充電リレーがオンされる前に直流電源ラインに切換え接続され、充電リレーのオン時に、充電器に対して充電前の車載電池の電圧を模擬する。充電器は、この電圧を検出することによって、充電リレーのオンを認識する。
【0007】
充電時には、車両模擬装置において充電器への充電電流の指令値を設定する。一方、抵抗負荷が直流電源ラインに切換え接続され、充電器からの直流出力を抵抗負荷で消費させている。
【0008】
このような車両模擬装置を利用した従来の充電器検定装置では、充電器と車両模擬装置との間で通信される信号(CHAdeMO方式では、CAN(Controller Area Network)信号および制御信号)と、抵抗負荷に印加される直流電圧/直流電流とを同時に観察している。このため、CAN信号アナライザ,オシロスコープ,電圧計/電流計を車両模擬装置に接続して、観察データを同時にプリントアウトし、仕様に従って充電シーケンスが実行されているか否かを検定している。
【発明の概要】
【発明が解決しようとする課題】
【0009】
従来の車両模擬装置では、充電器からの直流出力を抵抗負荷で消費させているので、電力消費が大きいという問題がある。また、模擬車載電池の電圧/電流・条件によって、抵抗負荷の抵抗値の変更が必要になる。この変更は、手動で行わなければならない、という不便さがある。さらに、充電器への充電電流の指令値の設定は、その都度入力しなければならない、という不便さがある。
【0010】
また、従来の充電器検定装置では、CAN信号アナライザ,オシロスコープ,電圧計/電流計で個別に観察されたデータを、プリントアウトしても、データを同時に確認することは、難しかった。したがって、CHAdeMO方式のような仕様に適合しているか否かの検定に時間がかかるという問題があった。
【0011】
このような問題は、電気自動車のみならず、ハイブリッド車,電気スクータ,電気機関車,電気モータボートなどの移動体にも生じ得る。
【0012】
本発明の目的は、抵抗負荷を用いることなく、消費電力を少なくすることができ、かつ、充電電流の指令を予め設定できる移動体模擬装置を提供することにある。
【0013】
本発明の他の目的は、データの同時収集およびデータの同時出力を確保しながら、短時間で検定を可能にする充電器検定装置を提供することにある。
【課題を解決するための手段】
【0014】
本発明の移動体模擬装置は、
交流電源の交流を直流に変換し、移動体の搭載電池を充電する充電器に接続され、前記充電器に対する車両のシーケンスを模擬する移動体模擬装置であって、
前記充電器の出力する充電電流が流れる直流電源ラインと、
前記充電器との間で通信される種々の信号が流れる信号ラインと、
前記直流電源ラインに挿入されて移動体の充電リレーを模擬し、前記信号ライン上の前記種々の信号の一つである、前記充電器からの信号によりオン・オフされるリレーと、
前記搭載電池を模擬する可逆型の直流/交流・変換器を有し、前記直流/交流・変換器の直流側端子が前記リレーに接続された回生負荷ユニットと、
前記信号ラインに接続され、前記充電器と通信するとともに、前記回生負荷ユニットを制御して、前記充電器に対する移動体の模擬シーケンスを実行する制御ユニットと、
前記直流電源ライン上の計測された電圧値および電流値と、前記信号ライン上の前記種々の信号とを、データとして収集するデータ収集ユニットとを備え、
前記直流/交流・変換器の交流側端子は、前記交流電源に接続され、
前記直流/交流・変換器は、
前記リレーがオンされる前に、前記交流電源の交流を直流に変換して前記直流側端子に直流電圧を出力し、充電前の搭載電池の電圧を模擬し、
前記リレーがオンされた後に、前記充電器からの直流を交流に変換し、前記直流側端子の直流電圧が充電時の搭載電池の電圧を模擬し、変換された交流を前記交流側端子から前記交流電源に回生する。
【0015】
本発明の充電器検定装置は、
前記移動体模擬装置と、
前記移動体模擬装置の前記制御ユニットおよび前記データ収集ユニットに接続された、制御処理装置とを備え、
前記制御処理装置は、
前記移動体模擬装置の制御ユニットに、パラメータを設定し、
設定された前記パラメータに従って実行された、前記充電器に対する移動体の模擬シーケンスが終了したときに、前記データ収集ユニットが収集した前記データに基づいて、前記充電器の充電シーケンスの応答タイミングが、所定の基準に適合しているか否かを検定し、検定結果を表形式で表示出力する。
【発明の効果】
【0016】
本発明の移動体模擬装置によれば、充電器の直流出力を、可逆型の直流/交流・変換器を用いた回生負荷ユニットにて、交流出力に変換し、充電器の交流入力電源に回生させるので、消費電力が少なくて済む。
【0017】
また、本発明の移動体模擬装置によれば、充電電流指令パターンを予め設定しておくので、充電器の充電電流を、この指令パターンに追従させることができる。
【0018】
本発明の充電器検定装置は、移動体模擬装置の模擬シーケンス動作中に、データを同時収集し、収集されたデータを解析し、基準と照合することによって、充電器の検定を行い、検定結果を表示出力するので、短時間で検定が可能になる。
【0019】
また、本発明の充電器検定装置によれば、データを同時出力表示できるので、検定結果の検証が可能となる。
【図面の簡単な説明】
【0020】
【図1】本発明の充電器検定装置の基本構成を示すブロック図である。
【図2】可逆型交直変換器の構成を示すブロック図である。
【図3】充電器検定装置の概略的な動作フローを示す図である。
【図4】制御処理装置をパーソナルコンピュータで構成した充電器検定装置を示す図である。
【図5】CHAdeMO方式で定める充電器と電気自動車の接続シーケンス回路を示す図である。
【図6】CHAdeMO方式で定める充電器と充電器検定装置の接続シーケンス回路を示す図である。
【図7】模擬動作パターンを示す図である。
【図8A】模擬動作のフローを示す図である。
【図8B】模擬動作のフローを示す図である。
【図9】CAN通信データの一覧を示す図である。
【図10】タイミングチャートを示す図である。
【図11A】故障が発生した場合の模擬動作シーケンスを示す図である。
【図11B】故障が発生した場合の模擬動作シーケンスを示す図である。
【発明を実施するための形態】
【0021】
以下の実施の形態は、移動体が電気自動車である場合について、代表的に説明する。
【0022】
[充電器検定装置の基本構成]
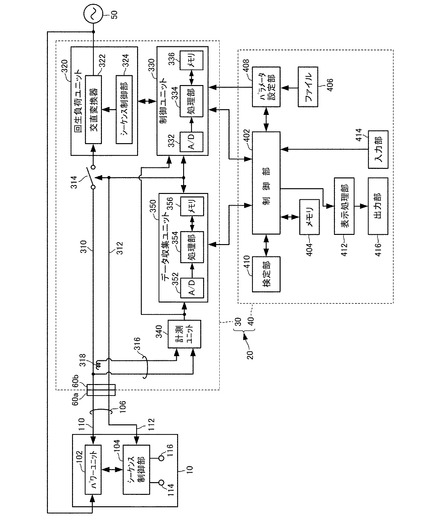
図1に示すように、被検定対象である充電器10を検定する充電器検定装置20は、車両模擬装置30と、制御処理装置40とから構成される。
【0023】
以下、充電器10,車両模擬装置30,制御処理装置40のそれぞれについて、説明する。
【0024】
(充電器)
充電器10は、交流電源50の交流を直流に変換するパワーユニット102と、パワーユニット102を制御するシーケンス制御部104とを備えている。
【0025】
充電器10から延びる給電ケーブル106の先端の給電コネクタ60aは、車両模擬装置30の受電コネクタ60bに接続される。給電ケーブル106は、直流電源ライン110と、信号ライン112とを含んでいる。
【0026】
直流電源ライン110は、充電器10のパワーユニット102から直流出力を車載電池に供給するラインである。
【0027】
信号ライン112は、充電器10と車両との間で通信される信号を送受するラインである。図では、信号ライン112を1本の線で示しているが、物理的に1本の信号線を示すものではなく、複数本の信号線を総称するものとして、用いている。CHAdeMO方式では、信号ラインは、CAN(Controller Area Network)信号ラインと制御信号ラインとを含んでいる。
【0028】
充電は、充電器10の充電開始ボタン114がオンされると開始する。充電途中で、充電を停止したい場合には、充電停止ボタン116をオンする。
【0029】
(車両模擬装置)
車両模擬装置30は、実車両が無い状態で充電器10の充電シーケンスを確認するために、充電器10に対する車両のシーケンスを模擬する装置である。
【0030】
車両模擬装置30には、給電ケーブル106の給電コネクタ60aに結合される受電コネクタ60bが、設けられている。受電コネクタ60bからは、車両模擬装置30の直流電源ライン310,信号ライン312が延びている。
【0031】
信号ライン312は、充電器10側の信号ライン112と同様に、物理的に1本の信号線を示すものではなく、複数本の信号線を総称するものとして、用いている。CHAdeMO方式では、信号ラインは、CAN信号ラインと制御信号ラインとを含んでいる。
【0032】
給電ケーブル106の給電コネクタ60aが、受電コネクタ60bに結合されると、充電器10側の直流電源ライン110,信号ライン112は、車両模擬装置30側の直流電源ライン310,信号ライン312に、接続される。
【0033】
車両模擬装置30は、さらに、充電リレー314と、回生負荷ユニット320と、制御ユニット330と、計測ユニット340と、データ収集ユニット350とを備えている。
【0034】
・充電リレー
充電リレー314は、直流電源ライン310に挿入され、車両の充電リレーを模擬するものである。
【0035】
・回生負荷ユニット
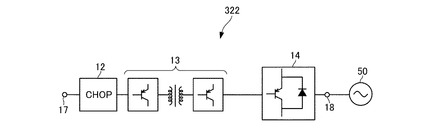
回生負荷ユニット320は、充電リレー314に接続され、車載電池を模擬するものである。この回生負荷ユニット320は、交流と直流とを可逆的に変換可能な交流/直流・変換器(以下、可逆型交直変換器という)322と、可逆型交直変換器322の動作を制御するシーケンス制御部324とを有している。
【0036】
図2に、可逆型交直変換器322の構成を示す。図2に示すように、可逆型交直変換器322は、チョッパ回路12,直流/直流・変換回路13,インバータ/整流器14で構成される。インバータ/整流器14は、一つの素子で構成され、インバータ動作,整流器動作の切換えは、シーケンス制御部324の制御によって行われる。
【0037】
可逆型交直変換器322の直流側端子17は、充電リレー314に接続され、交流側端子18は交流電源50に接続される。
【0038】
・制御ユニット
制御ユニット330は、回生負荷ユニット320を制御するとともに、信号ライン312を経て充電器10のシーケンス制御部104と通信して、車両のシーケンスを模擬する。
【0039】
充電器10に対する車両のシーケンスを模擬するために、車両模擬装置30の制御ユニット330には、制御処理装置40でパラメータ設定された、模擬動作パターン,充電電流指令パターン,電圧指令パターンが入力される。
【0040】
制御ユニット330は、さらに、回生負荷ユニット320に、運転/停止・信号を入力する。
【0041】
制御ユニット330は、少なくともA/Dコンバータ332,処理部334,メモリ336を含んで構成される。このような制御ユニット330は、マイクロコンピュータで実現される。したがって、制御ユニット330は、回生負荷ユニット320をプログラマブルに制御できる。
【0042】
A/Dコンバータ332は、計測ユニット340からの、直流電源ライン310上の電流値,電圧値(アナログ信号)を、デジタル信号にA/D変換し、処理部334に送る。処理部334は、充電器10,制御処理装置40と通信し、および回生負荷ユニット320を制御する。
【0043】
・データ収集ユニット
データ収集ユニット350は、信号ライン312上の信号、および直流電源ライン310上の電圧値,電流値を、データとして収集する。このためには、信号ライン312はデータ収集ユニット350に接続され、直流電源ライン310は、計測ライン316および計測ユニット340を介して、データ収集ユニット350に接続される。電圧値は、直流電源ライン310に計測ライン316を接続することにより、電流値は、直流電源ライン310に設けた変成器318を計測ライン316に接続することにより、取出される。
【0044】
データ収集ユニット350は、少なくともA/Dコンバータ352,処理部354,メモリ356を含んで構成される。このようなデータ収集ユニット350は、マイクロコンピュータで実現される。
【0045】
A/Dコンバータ352は、計測ユニット340を経た、直流電源ライン310上の電流値,電圧値をA/D変換し、処理部354に送る。信号ライン312上のデジタル信号は、処理部354に送られる。処理部354に送られたデジタル信号は、処理部354で区分けされて、メモリ356にデータとして格納される。
【0046】
メモリ356に格納されたデータは、模擬シーケンスの実行中にメモリ356から読出され、制御処理装置40に転送される。
【0047】
・計測ユニット
計測ユニット340は、直流電源ライン310とデータ収集ユニット350との間を絶縁し、電流値,電圧値をデータ収集ユニット350および制御ユニット330に送る。
【0048】
(制御処理装置)
制御処理装置40は、制御部402,メモリ404,パラメータファイル406,パラメータ設定部408,検定部410,表示処理部412,入力部414,出力部416を備えている。
【0049】
このような制御処理装置40は、パーソナルコンピュータで実現される。この場合、制御部402,パラメータ設定部408,検定部410,表示処理部412の各機能は、CPUで実行されるプログラムで実現される。
【0050】
・制御部
制御部402は、車両模擬装置30の模擬シーケンス動作を制御するために、車両模擬装置30の制御ユニット330と通信する。
【0051】
制御部402は、また、データ収集ユニット350と通信し、データ収集ユニット350から転送されてくるデータをメモリ404に格納する。
【0052】
制御部402は、また、パラメータ設定部408,検定部410,表示処理部412の動作を制御する。
【0053】
・メモリ
メモリ404は、データ収集ユニット350からの収集データ、検定部410の検定結果、およびCPUで実行されるプログラムが格納される。
【0054】
・パラメータファイル
パラメータファイル406には、模擬動作パターン,充電電流指令パターン,電圧指令パターンが、予め記述される。
【0055】
模擬動作パターンは、充電器に対する車両の応答シーケンスを模擬するパターンである。
【0056】
充電電流指令パターンは、充電器へ指令する充電電流のパターンであり、電流指令値と時間情報とで定められる。
【0057】
電圧指令パターンは、車載電池の充電時の電圧を模擬するパターンであり、電圧指令値と時間情報とで定められる。
【0058】
これらのパラメータは、制御処理装置40においてプログラム処理で作成されるが、パラメータの作成方法は、本発明の特徴ではないので、説明は省略する。
【0059】
パラメータファイル406は、実際には、メモリ404に作成される。
【0060】
・パラメータ設定部
パラメータ設定部408は、入力部414からの選択指示により、模擬動作パターン,充電電流指令パターン,電圧指令パターンを、パラメータファイル406から選択して、車両模擬装置30の制御ユニット330に設定する。設定されたパラメータは、制御ユニット330のメモリ336に格納される。
【0061】
パラメータ設定部408は、ファイル406から選択したパラメータを、入力部414からの指示により変更することもできる。
【0062】
・検定部
検定部410は、車両模擬装置30の模擬動作中に、データ収集ユニット350で収集され、転送されてきたデータに基づいて、模擬動作終了後に充電器10の充電シーケンスの応答タイミングが基準に適合するか否か、および計測された電圧値,電流値が基準に定められた精度に入っているか否かを検定する。検定結果は、メモリ404に格納される。
【0063】
したがって、検定部410には予め基準を入力しておく。このような基準は、CHAdeMO方式の仕様、あるいはユーザが独自に規定した基準であってもよい。
【0064】
・表示処理部
表示処理部412は、メモリ404から検定結果を読出し、表形式に作成し、出力部416に表示させる。また、メモリ404から収集データを選択して読出し、時間軸を共通にしたタイミングチャートを作成する。タイミングチャートは、模擬シーケンス動作中にほぼリアルタイムで表示したり、模擬シーケンスが終了した後に表示することができる。
【0065】
・出力部
出力部416は、表示処理部412で形成されたタイミングチャートおよび表を出力表示する。
【0066】
・入力部
入力部414は、制御部402へ各種の指示を入力する。
【0067】
以上のような構成の制御処理装置40は、前述したようにパーソナルコンピュータで実現される。制御部402,パラメータ設定部408,検定部410,表示処理部412の各機能は、CPUで実行されるプログラムで実現される。入力部414は例えばキーボード、出力部416は例えばディスプレイおよびプリンタである。
【0068】
[充電器検定装置の基本動作]
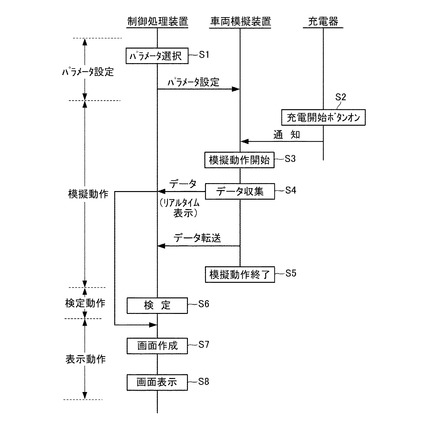
図3に示される概略的な動作フローに従って、図1の充電器検定装置20の基本動作を説明する。
【0069】
(パラメータ設定)
充電器検定装置20のオペレータは、充電器10の給電コネクタ60aを車両模擬装置30の受電コネクタ60bに接続する。
【0070】
オペレータは、制御処理装置40の入力部414から、制御部402にパラメータ(模擬動作パターン,充電電流指令パターン,電圧指令パターン)の選択を指示し検定開始ボタンを押す(ステップS1)。ここに、検定開始とは、続く模擬シーケンス動作,検定動作を含む一連の動作の開始を意味するものとする。なお、検定開始ボタンは、入力部414であるキーボード上の一つのキーである。
【0071】
制御部402は、選択されたパラメータの設定をパラメータ設定部408に指示する。
【0072】
パラメータ設定部408は、パラメータファイル406からパラメータを取得し、車両模擬装置30の制御ユニット330に設定する。設定されたパラメータは、メモリ336に格納される。
【0073】
(模擬シーケンス動作)
車両模擬装置30の制御ユニット330の処理部334は、設定された充電電流指令パターン,電圧指令パターンに従い、回生負荷ユニット320を運転状態にする。
【0074】
回生負荷ユニット320の可逆型交直変換器322は、シーケンス制御部324によって、インバータ/整流器14の切換えが行われる。制御ユニット330で、電圧指令パターンの電圧指令値と、計測ユニット340からの計測電圧値との大小関係を判定し、判定結果によって、シーケンス制御部324を指示する。
電圧指令値 ≧ 計測電圧値 の場合、整流器動作
電圧指令値 < 計測電圧値 の場合、インバータ動作
【0075】
オペレータは、続いて、充電器10の充電開始ボタン114をオンする(ステップS2)。充電開始ボタン114がオンされると、充電開始ボタン114のオンが車両模擬装置30の制御ユニット330に通知され、模擬シーケンス動作が開始される(ステップS3)。
【0076】
充電開始ボタン114のオン後に、回生負荷ユニット320のシーケンス制御部324は、電圧指令値≧計測電圧値であるので、可逆型交直変換器322のインバータ/整流器14を、整流器動作に切換える。交流電源50からの交流は、インバータ/整流器14,直流/直流・変換回路13,チョッパ回路12により直流に変換されて、直流側端子17に直流電圧が出力される。この直流電圧は、充電前の車載電池の電圧を模擬する。
【0077】
充電器10のシーケンス制御部104と、車両模擬装置30の制御ユニット330との間で、信号ライン112,312を経て通信が開始される。
【0078】
車両模擬装置30の制御ユニット330は、信号ライン312,112を経て、充電器10のシーケンス制御部104に充電許可を通知する。
【0079】
充電器10は絶縁試験後、信号ライン112,312を経て車両模擬装置30の制御ユニット330に充電準備完了を通知する。
【0080】
車両模擬装置30の制御ユニット330は、充電器10の充電準備完了を認識して、充電リレー314をオンする。これにより、充電器10のパワーユニット102には、直流電源ライン110,310を経て、可逆型交直変換器322の直流電圧が印加され、充電器10のシーケンス制御部104は、充電リレー314のオンを認識する。
【0081】
車両模擬装置30の制御ユニット330は、充電電流指令パターンをメモリ336から読出して、信号ライン312,112を経て、充電器10のシーケンス制御部104に通知する。他方、制御ユニット330は、メモリ336から電圧指令パターンを読出し、電圧指令パターンを、回生負荷ユニット320のシーケンス制御部324に通知する。
【0082】
充電器10のパワーユニット102は、シーケンス制御部104の制御に従って、充電電流指令パターンに応じた充電電流を発生する。充電電流は、直流電源ライン110,310を経て、回生負荷ユニット320の可逆型交直変換器322に供給される。回生負荷ユニット320のシーケンス制御部324は、電圧指令値<計測電圧値であるので、可逆型交直変換器322のインバータ/整流器14を、インバータ動作に切換える。
【0083】
可逆型交直変換器322は、直流電流である充電電流を引込み、チョッパ回路12,直流/直流・変換回路13,インバータ/整流器14により、直流を交流に変換する。このとき、可逆型交直変換器322の直流側端子17の電圧は、電圧指令パターンの電圧指令値に保持される。すなわち、定電圧制御される。これにより、充電時の車載電池の電圧を模擬する。変換された交流は、交流側端子18から交流電源50に回生される。
【0084】
模擬シーケンス動作中に、信号ライン312上の信号がデータ収集ユニット350にデータとして収集され、および直流電源ライン310上の計測された計測電圧値,計測電流値が、計測ユニット340を経て、データ収集ユニット350にデータとして収集される(ステップS4)。
【0085】
データ収集ユニット350では、A/Dコンバータ352が、直流電源ライン310上の電圧値,電流値をA/D変換して、処理部354に送る。信号ライン312上のデジタル信号は、A/Dコンバータ352を経ることなしに処理部354に送られる。処理部354で各データの仕分けを行い、データごとにメモリ356に格納していく。
【0086】
データ収集ユニット350は、メモリ356に格納されたデータを、模擬シーケンス動作中に、制御処理装置40の制御部402に転送する。転送されたデータは、メモリ404に格納される。
【0087】
車両模擬装置30の模擬シーケンス動作が全て終了すると(ステップS5)、模擬装置30の制御ユニット330は、回生負荷ユニット320を運転停止状態にする。
【0088】
制御処理装置40の制御部402は、検定部410に検定を指示する。検定部410は、メモリ404からデータを読出して、データ解析を行い検定を実施する(ステップS6)。
【0089】
データ解析により、基準で定められている充電器10の充電シーケンスが遵守しなければならない管理時間と対応する検定ポイント時間を求める。検定ポイント時間は、充電器10の充電シーケンスの特定のステップから特定のステップに至る時間として、定義される。
【0090】
解析された検定ポイント時間を、基準で定められている管理時間(以下、検定管理時間という)と照合することによって、充電器10の充電シーケンスが基準に適合するか否かを検定し、良否を示す検定結果を制御部402に通知する。検定結果は、メモリ404に格納される。
【0091】
検定部410は、さらに、計測された電圧値,電流値の誤差が、基準で定める精度内にあるか否かを検定し、良否を示す検定結果を制御部402に通知する。検定結果は、メモリ404に格納される。
【0092】
(表示動作)
制御処理装置40の出力部416であるディスプレイには、検定結果を示す表のみならず、検定結果を検証するためのタイミングチャート、模擬シーケンス動作を確認できるタイミングチャート、模擬シーケンス動作中のログメッセージ等を表示する。
【0093】
・検定結果レポート
制御処理装置40の制御部402は、表示処理部412に検定結果を表形式で作成させる(ステップS7)。表示処理部412で作成された表形式の検定結果レポートは、出力部414のディスプレイ上に表示される(ステップS8)。オペレータは、検定結果をディスプレイ上で、確認することができる。また、出力部416のプリンタに出力させることもできる。
【0094】
・検定結果を検証するためのデータのタイミングチャート
オペレータは、検定結果からデータの発生タイミングや、データの状況などを検証したい場合がある。このため、制御処理装置40の制御部402は、検証したいデータをメモリ404から選択して読出し、表示処理部412に送る。表示処理部412では、各データを、時間軸を共通にしたタイミングチャートに作成し(ステップS7)、出力部416に表示する(ステップS8)。また、プリンタに出力させることもできる。
【0095】
・検定結果を検証するためのデータの表形式表示
模擬動作終了後に、オペレータは、検定結果を検証するために、データを表形式で出力部416に表示することもできる(ステップS7,S8)。
【0096】
・模擬シーケンス動作を確認するためのデータのタイミングチャート
模擬シーケンス動作中に模擬シーケンス動作の進行状況を確認するために、所定のデータをデータ収集ユニット350のメモリ356から読出して、制御処理装置40の表示処理部412に送る。表示処理部412では、各データを時間軸を共通にしたタイミングチャートに作成し、ディスプレイ上に表示することもできる(ステップS7,S8)。これにより、オペレータは、模擬シーケンスの進行中のデータの状況を同時に確認することができる。
【0097】
・ログメッセージ表示
模擬動作中、車両模擬装置30から制御処理装置40に通信されるログメッセージは、制御処理装置40の制御部402に送られ、出力部416に表示される。オペレータは、表示されたログメッセージを見て、模擬シーケンスの動作を逐一確認することができる。
【0098】
以上の表示は、代表的なものであり、これらに限定されるものではなく、データを加工して、検証に必要な種々の表,タイミングチャートを作成し、表示することができる。さらには、実施した模擬動作パターンを表示するようにしてもよい。
【実施例1】
【0099】
以下、充電方式基準がCHAdeMO方式仕様の場合の充電器検定装置の実施例を説明する。なお、CHAdeMO方式仕様は、充電を例えば数十分の短時間で行う急速充電器について規定する。本実施例は、実施の形態の一例を示すものであり、本発明を急速充電器に限定することを、意図するものではない。
【0100】
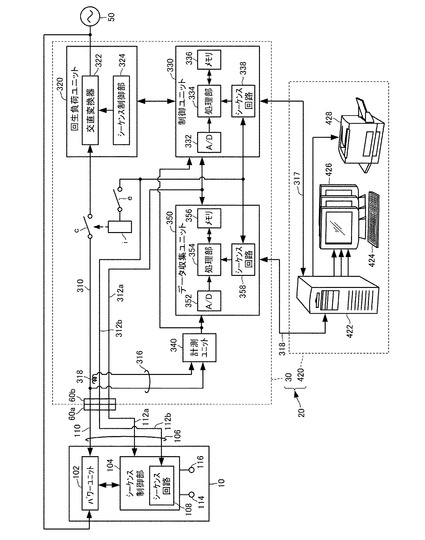
図4は、図1の制御処理装置40をパーソナルコンピュータ(以下、パソコンという)で構成した例である。図1と同一の構成要素には、同一の参照番号を付して示す。
【0101】
充電器10の交流電源50には、商用系統の3相200Vの交流電源を用いるものとする。
【0102】
また、充電器10の充電方式は、定電流充電方式であるものとする。すなわち、車両模擬装置30から指令される充電電流指令パターンに応じて充電電流を出力する。
【0103】
パソコン420は、パソコン本体422,キーボード424,ディスプレイ426,プリンタ428で構成される。
【0104】
充電器10のシーケンス制御部104と、車両模擬装置30の制御ユニット330とを接続する信号ライン112,312は、CAN通信情報(以下、CAN信号という)を伝送するCAN信号ライン112a,312aと、後述するシーケンス回路を動作する信号(以下、制御信号という)を伝送する制御信号ライン112b,312bとで構成される。
【0105】
CAN信号は、CHAdeMO方式仕様によれば、数値,状態フラグ,故障フラグを含む。数値は、充電電流指令値,現在出力電流値,現在出力電圧値等の数値データである。状態フラグは、例えば充電許可状態を示すフラグ(車両充電可能)であり、充電許可は"1"に、充電禁止は"0"に設定される。故障フラグは、例えば車載電池の電圧状況を示す状態フラグ(電池過電圧)を示すフラグであり、異常時は"1"に、正常時は"0"に設定される。
【0106】
CAN信号ライン312aおよび制御信号ライン312bは、それぞれ、車両模擬装置30のデータ収集ユニット350に接続される。
【0107】
データ収集ユニット350には、さらに、直流電源ライン310が、計測ライン316,計測ユニット340を介して、接続される。
【0108】
パソコン420は、車両模擬装置30の制御ユニット330およびデータ収集ユニット350に、それぞれシリアル通信ライン317,318を経て接続される。
【0109】
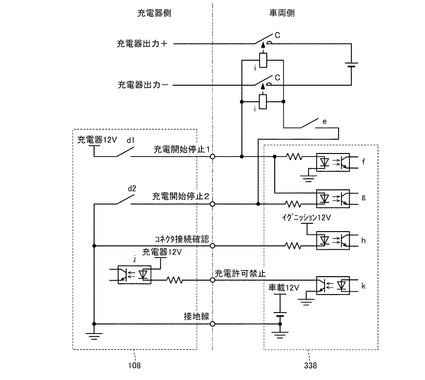
CHAdeMO方式仕様によれば、充電器側および車両側に、それぞれシーケンス回路108,338を備えている。図5に、CHAdeMO方式仕様で定めるシーケンス回路を示す。
【0110】
図5に示すように、充電器側のシーケンス回路108は、スイッチd1,d2と、フォトカプラjとを有している。
【0111】
車両側のシーケンス回路338は、フォトカプラf,g,hおよびスイッチkを有している。
【0112】
充電リレーc(図1の充電リレー314に同じ)は、コイル用スイッチeを含んでいる。スイッチeがオン/オフすると、充電リレーcがオン/オフする。図4,図5において、参照記号iは、リレーコイルを示す。
【0113】
シーケンス回路108は、充電器10のシーケンス制御部104内に設けられている。
【0114】
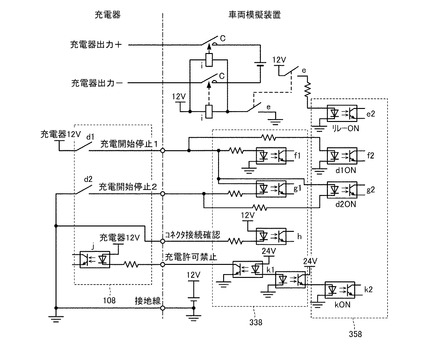
本実施例の充電器検定装置20では、図4に示すように、シーケンス回路338を、車両模擬装置30の制御ユニット330内に設ける。
【0115】
データ収集ユニット350が制御信号を収集する必要があるため、スイッチe、フォトカプラf,g、およびスイッチkに、それぞれ1:1に対応したフォトカプラを含むシーケンス回路358を、データ収集ユニット350内に設ける。図6は、シーケンス回路108,338,358を示すシーケンス回路図である。
【0116】
図6では、制御ユニット330のシーケンス回路338において、フォトカプラf,gをf1,g1で、スイッチkをk1で示す。
【0117】
データ収集ユニット350のシーケンス回路358において、スイッチe、フォトカプラf1,g1、スイッチk1に、それぞれ、1:1に対応するフォトカプラを、e2,f2,g2,k2で示す。
【0118】
これらのシーケンス回路108,338,358とスイッチeとは、図4に示すように、制御信号ライン312bで相互に接続されている。したがって、制御信号ライン312b上の制御信号を収集することは、データ収集ユニット350のシーケンス回路358のフォトカプラのオン/オフ情報を収集すればよいことになる。
【0119】
以下、本実施例の充電器検定装置20の動作を、模擬動作、回生負荷ユニットの動作、データ収集ユニットの動作、検定動作などに区分して説明する。
【0120】
(模擬動作)
充電器検定装置20のオペレータは、充電器10の給電コネクタ60aを、車両模擬装置30の受電コネクタ60bに接続する。
【0121】
オペレータは、パソコン420において、キーボード424から、パラメータ(模擬動作パターン,充電電流指令パターン,電圧指令パターン)の選択を指示する。パソコン420は、選択されたパラメータを、車両模擬装置30の制御ユニット330に設定する。
【0122】
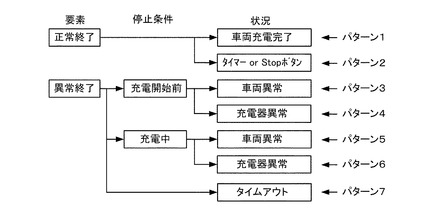
模擬動作パターンは、車両の応答シーケンスを模擬するものであり、停止要素や状況,条件によって、図7に示す7種類のパターンが準備される。
【0123】
パターン1は、車両の充電完了で、停止へ移行するパターンである。
パターン2は、充電タイムアップもしくは停止ボタンで、停止へ移行するパターンである。なお、停止とは、模擬動作を停止させる充電器上の充電停止ボタン116を押しての停止を意味する。
パターン3は、充電開始前の車両異常発生で、停止へ移行するパターンである。
パターン4は、充電開始前の充電器異常発生で、停止へ移行するパターンである。
パターン5は、充電中の車両異常発生で、停止へ移行するパターンである。
パターン6は、充電中の充電器異常発生で、停止へ移行するパターンである。
パターン7は、車両応答の遅れにより充電器がタイムアウトをして、停止へ移行するパターンである。
【0124】
充電開始前の車両異常は、例えば、充電開始前に車載電池電圧が直流電源ラインに印加されない異常である。
【0125】
充電開始前の充電器異常は、例えば、充電器内部で発生する異常である。
【0126】
充電中の車両異常は、例えば充電中に車載電池の下限電圧に到達する異常(電池不足電圧)、充電中に車載電池の温度上限に達する異常(電池温度高)、充電中にシフトレバー位置が車両の移動可能位置に変更される異常(車両シフト位置)、充電中に充電器からCAN信号が送られてこない異常(車両その他故障)等である。
【0127】
充電中の充電器異常は、例えば、充電中に車載電池の上限電圧に到達する異常(電池過電圧)、充電電流指令値に充電器の出力が追随しない異常(電池電流差異)、充電器の現在出力電圧値が車両の電池電圧と異なる異常(電圧差異)、充電中に車載電池の温度上限に達する異常(電池温度高)である。
【0128】
タイムアウトとは、車両応答に過度な遅延が生じ、タイムアウト時間内に車両応答がない場合に、車両に異常が発生したと充電器が判断することである。
【0129】
パターン1〜6では、充電器のシーケンス動作に対する車両側の応答タイミングは、車両側が遵守しなければならない全てのシーケンスの応答タイミングが仕様(標準仕様書)で定義された時間内であれば、シーケンス毎に0.1秒単位で任意に設定される(任意設定)。これは、車両は仕様の範囲内で製作され、応答タイミングはメーカ毎に異なるので、種々の車両に検定装置が適合できるようにするためである。
【0130】
パターン3,5の車両異常については、異常の種類,発生タイミングを決定してパターンに含めることができる。
【0131】
パターン7では、充電器のタイムアウトを発生させる車両模擬装置のシーケンス応答時間は、充電器のタイムアウト時間を超過するように設定される。
【0132】
以上のような模擬動作パターンは、車両模擬シーケンス,応答タイミングにより、定められる。
【0133】
実際の検定に際しては、模擬動作パターン1は必ず実行するが、模擬動作パターン2〜7の実行については、オペレータの判断に委ねられる。
【0134】
パターン1の一例については、後述する模擬シーケンス動作の中で説明する。
【0135】
充電電流指令パターンは、時間情報,電流指令値で構成される。充電電流指令パターンの一例を、表1に示す。
【表1】

【0136】
電圧指令パターンは、時間情報,電圧指令値で構成される。電圧指令パターンの一例を、表2に示す。
【表2】
【0137】
上述した模擬動作パターン,充電電流指令パターン,電圧指令パターンは、パソコン420において、プログラム処理により作成され、ファイルに格納される。
【0138】
車両模擬装置30の制御ユニット330の処理部334は、パソコン420から送られてきた模擬動作パターン,充電電流指令パターン,電圧指令パターンに従い、充電器対応の車両の模擬と、車載電池の模擬とを行う。
【0139】
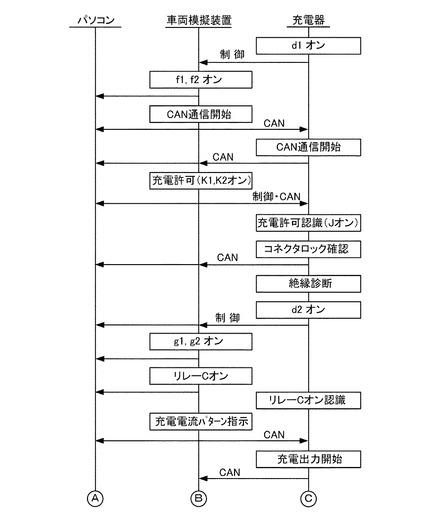
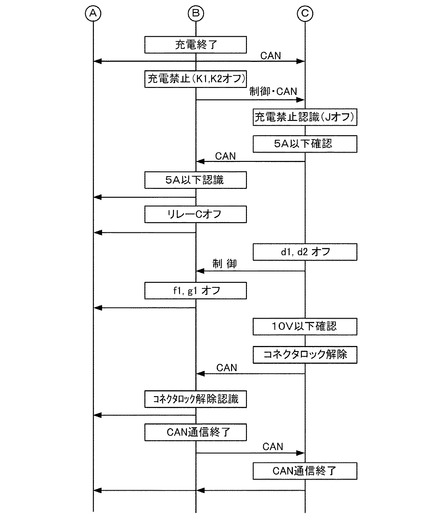
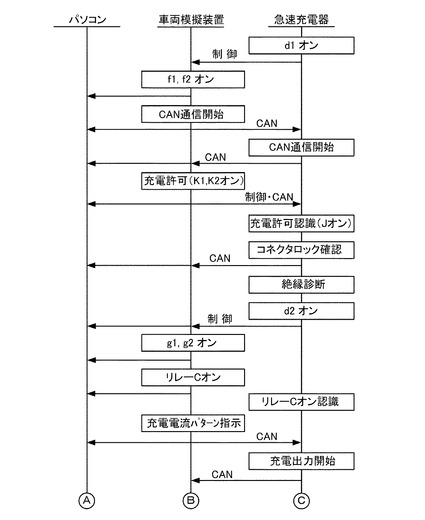
模擬動作パターンとしてパターン1(車両の充電完了で、停止へ移行するパターン)が設定された場合の模擬動作を、図8A,図8Bに示すフロー図を参照しながら、以下に説明する。図8A,図8Bに示される車両模擬装置30の応答シーケンスが、模擬動作パターン1を表している。
【0140】
オペレータが充電器10の充電開始ボタン114を押すと、スイッチd1がオンする。
【0141】
スイッチd1がオンすると、制御信号ライン112b,312bを経て、車両模擬装置30の制御ユニット330のシーケンス回路338のフォトカプラf1、およびデータ収集ユニット350のシーケンス回路358のフォトカプラf2がオンする。フォトカプラf1のオンを、制御ユニット330の処理部334が認識する。
【0142】
制御ユニット330の処理部334は、充電器10のシーケンス制御部104へ、CAN信号ライン312a,112aを経て、CAN信号の送信を開始する。
【0143】
充電器10のシーケンス制御部104は、車両模擬装置30のCAN信号送信開始を認識すると、車両模擬装置30の制御ユニット330へ、CAN信号の送信を開始する。
【0144】
制御ユニット330の処理部334は、充電器10からのCAN信号を認識すると、シーケンス回路338のスイッチk1をオンする。スイッチk1のオンは、充電許可を示す。スイッチk1がオンすると、制御信号ライン112b,312bを経て、充電器10のシーケンス回路108のフォトカプラj、およびデータ収集ユニット350のシーケンス回路358のフォトカプラk2がオンする。同時に、制御ユニット330の処理部334は、充電許可を示す状態フラグ(車両充電可能フラグ)「1」を、CAN信号により充電器10のシーケンス制御部104に通知する。
【0145】
充電器10のシーケンス制御部104は、シーケンス回路108のフォトカプラjのオンおよび車両充電可能フラグ「1」により、充電許可を認識する。
【0146】
充電器10のシーケンス制御部104は、給電コネクタ60aの受電コネクタ60bへのロックを確認すると、コネクタロックをCAN信号で車両模擬装置30の制御ユニット330の処理部334に通知する。
【0147】
続いて、充電器10のシーケンス制御部104は、充電ケーブル106の絶縁診断を実施する。絶縁診断の結果が良であれば、スイッチd2をオンする。スイッチd2のオンは、充電器10が、充電可能状態にあることを示す。
【0148】
スイッチd2がオンすると、制御信号ライン312bを経て、車両模擬装置30の制御ユニット330のシーケンス回路338のフォトカプラg1、およびデータ収集ユニット350のシーケンス回路358のフォトカプラg2がオンする。
【0149】
制御ユニット330の処理部334は、フォトカプラg1のオンを認識すると、所定時間経過後にスイッチeをオンする。これにより、充電リレーcがオンする。同時に、スイッチeのオンにより、データ収集ユニット350のシーケンス回路358のフォトカプラe2がオンする。
【0150】
充電リレーcがオンすると、充電器10のパワーユニット102は、直流電源ライン110,310を経て、回生負荷ユニット320の可逆型交直変換器322に接続される。充電器10のパワーユニット102は、交直変換器322の直流電圧出力を検出することにより、充電リレーcのオンを認識する。
【0151】
制御ユニット330の処理部334は、充電リレーcのオン後、所定時間経過すると、充電器10のシーケンス制御部104に対し、CAN信号により、充電電流指令パターンの指令を開始する。この充電電流指令パターンは、メモリ336から読出される。
【0152】
充電器10のパワーユニット102は、シーケンス制御部104により制御されて、充電電流指令パターンに追従して充電電流の出力を開始する。
【0153】
このとき充電器10のシーケンス制御部104は、現在出力電圧値および現在出力電流値を、CAN信号により車両模擬装置30の制御ユニット330に通知する。
【0154】
充電電流は、後述するように、車載電池を模擬する回生負荷ユニット320の交直変換器322に吸収される。
【0155】
車両模擬装置30の制御ユニット330の処理部334は、充電終了をCAN信号により充電器10のシーケンス制御部104に通知した後、シーケンス回路338のスイッチk1をオフする。スイッチk1のオフは、充電禁止を示す。スイッチk1がオフすると、制御信号ライン112b,312bを経て、充電器10のシーケンス回路108のフォトカプラj、およびデータ収集ユニット350のシーケンス回路358のフォトカプラk2がオフする。同時に、制御ユニット330の処理部334は、充電禁止を示す状態フラグ「0」を、CAN信号により充電器10のシーケンス制御部104に通知する。
【0156】
スイッチk1がオフすると、制御信号ライン312b,112bを経て、充電器10のシーケンス回路108のフォトカプラjがオフする。
【0157】
充電器10のシーケンス制御部104は、フォトカプラjのオフおよび状態フラグ(車両充電可能フラグ)「0」により、充電禁止を認識する。
【0158】
シーケンス制御部104は、充電電流が5A以下であることを確認すると、CAN信号により、車両模擬装置30の制御ユニット330に通知する。
【0159】
制御ユニット330の処理部334は、充電電流が5A以下であることを認識すると、リレーの溶着は生じないとして、スイッチeをオフして、充電リレーcをオフする。
【0160】
続いて、充電器10のシーケンス制御部104は、シーケンス回路108のスイッチd1,d2をオフする。
【0161】
スイッチd1,d2がオフすると、制御信号ライン112b,312bを経て、車両模擬装置30の制御ユニット330のシーケンス回路338のフォトカプラf1,g1がオフする。
【0162】
充電器10のシーケンス制御部104は、パワーユニット102の出力電圧が10V以下であることを確認する。
【0163】
10V以下であると、コネクタコンタクトの溶着は生じないとして、充電器10のシーケンス制御部104は、コネクタロックを解除し、CAN信号により、車両模擬装置30の制御ユニット330にコネクタロック解除を通知する。
【0164】
制御ユニット330の処理部334は、コネクタロック解除を認識すると、CAN信号により、CAN通信終了を充電器10のシーケンス制御部104に通知する。
【0165】
シーケンス制御部104は、車両模擬装置30からのCAN信号の通信終了を認識すると、CAN信号の通信を終了する。
【0166】
以上の模擬動作では、車両模擬装置30からパソコン420への通信については、説明しなかったが、図8A,図8Bのフロー図に示すように、車両模擬装置30および充電器10の各動作をパソコン420に通知し、ログメッセージとしてディスプレイ426に表示する。
【0167】
なお、CAN信号には、上述した信号以外に、図9に示す数値,状態フラグ,故障フラグを示すCAN信号も含まれる。検定装置20から充電器10に送信される電池総容量,電池耐力上限値,最大充電時間,電池残存容量,充電電圧上限値は、車両模擬に必要なデータであり、制御ユニット330のメモリ336に、予め設定されている。
【0168】
(回生負荷ユニットの動作)
模擬運転中の回生負荷ユニット320による車載電池の模擬動作を説明する。
【0169】
車両模擬装置30の制御ユニット330の処理部334により、回生負荷ユニット320が運転状態になる。このとき、制御ユニット330の処理部334は、計測ユニット340からの計測電圧値と、メモリ336に設定されている電圧指令値と比較する。充電開始前は、電圧指令値≧計測電圧値であるので、制御ユニット330は、回生負荷ユニット320のシーケンス制御部324を指示して、可逆型交直変換器322が、交流を直流に変換するように動作させる。
【0170】
シーケンス制御部324の制御により、可逆型交直変換器322は、交流電源50の3相交流200Vを、インバータ/整流器14で整流し、直流/直流・変換回路13で絶縁・昇圧し、チョッパ回路12で直流400Vに変換して、直流側端子17に直流400Vを出力する。
【0171】
その後、スイッチeがオンし、充電リレーcがオンされると、充電器10のパワーユニット102が、直流電源ライン110,310を経て、回生負荷ユニット320の可逆型交直変換器322の直流側端子17に接続される。
【0172】
充電器10のパワーユニット102には、直流400Vが印加され、これにより充電器10のシーケンス制御部104は、充電リレーcのオンを認識する。
【0173】
前述したように、充電リレーcのオン後に、充電電流指令パターンは、車両模擬装置30の制御ユニット330から、CAN信号により充電器10のシーケンス制御部104に送られる。充電器10は、充電電流指令パターンに従って、可逆型交直変換器322に充電電流を流す。
【0174】
一方、充電リレーcのオン後に、制御ユニット330の処理部334から電圧指令パターンが、回生負荷ユニット320のシーケンス制御部324に指示される。電圧指令パターンは、可逆型交直変換器322を定電圧制御するためのものであり、電圧指令パターンの電圧指令値は、車載電池の電池電圧である300〜400Vに設定される。
【0175】
このとき、制御ユニット330の処理部334は、計測ユニット340からの計測電圧値と、メモリ336に設定されている電圧指令値と比較する。充電開始後は、電圧指令値<計測電圧値となるので、制御ユニット330は、回生負荷ユニット320のシーケンス制御部324を指示して、可逆型交直変換器322が、直流を交流に変換するように動作させる。
【0176】
可逆型交直変換器322は、充電器10の直流出力をチョッパ回路12で昇圧し、直流/直流・変換回路13で絶縁・降圧し、インバータ/整流器14で3相200Vの交流に変換する。この直流から交流の変換によって、充電器10からの充電電流は、可逆型交直変換器322に吸収される。このとき、可逆型交直変換器322の直流側端子17の電圧は、電圧指令パターンの指令する電圧値に保持され、充電時の車載電池の電圧を模擬する。すなわち、可逆型交直変換器322は、指令された電圧指令パターンの電圧値で、電池電圧を模擬する。
【0177】
可逆型交直変換器322で変換された3相交流は、商用系統の3相交流電源50に回生される。このように、充電器10の直流出力を回生負荷ユニット320にて充電器10の交流入力に回生させるため、消費電力が少なくて済む。
【0178】
充電リレーcがオフした時点で、制御ユニット330は、シーケンス制御部324に停止指令を出して、回生負荷ユニット320の運転を停止させる。
【0179】
以上説明したように、可逆型交直変換器322は、基本的には定電圧制御である。しかし、過大な充電電流が誤って充電器10から供給されるような場合に備えて、定電流制御に切換えられるようにしてもよい。この場合には、充電電流指令パターンも、回生負荷ユニットのシーケンス制御部に指示される。この充電電流指令パターンにより、定電流制御が行われる。
【0180】
(データ収集ユニットの動作)
模擬運転開始から終了までに、CAN信号ライン312a上の信号(デジタル)、制御信号ライン312b上の信号(デジタル)、直流電源ライン310上の電圧値,電流値(アナログ)を、データ収集ユニット350に収集する。直流電源ライン310上の電圧値,電流値は、計測ライン316から計測ユニット340を経て、データ収集ユニット350に収集される。
【0181】
制御信号ライン312b上の信号の収集は、データ収集ユニット350のシーケンス回路358のフォトカプラe2,f2,g2,k2のオン/オフ状態を検出することにより、収集できる。
【0182】
フォトカプラe2のオン/オフは、充電リレーcのオン/オフを示している。フォトカプラf2のオン/オフは、充電器10のスイッチd1のオン/オフを示している。フォトカプラg2のオン/オフは、充電器10のスイッチd2のオン/オフを示している。フォトカプラk2のオン/オフは、充電許可/充電禁止を示している。
【0183】
収集されたデータのうち、デジタル信号は処理部354で10ms毎にサンプリングされて、メモリ356に格納される。一方、アナログ信号はA/Dコンバータ352で10ms毎にサンプリングされてデジタル信号に変換されて処理部354に送られ、メモリ356に格納される。
【0184】
(検定動作)
パソコン420は、模擬動作中に転送されたデータをメモリに格納する。模擬動作が終了すると、パソコン420は、車両模擬装置30のデータ収集ユニット350に、検定動作終了を通知する。データは、複数種類存在する。複数種類のデータの中から所定のデータを選択して、メモリから読出して解析する。
【0185】
データの解析は、充電方式仕様で定められている充電器10の充電シーケンスが遵守しなければならない管理時間の規定値と対応する検定ポイント時間を解析する。
【0186】
解析された検定ポイント時間を、充電方式仕様の管理時間(以下、検定管理時間という)と照合することによって、仕様に適合するか否かを検定し、良否を示す検定結果をメモリに格納する。
【0187】
例えば、CHAdeMOの仕様によれば、表3に示すような検定ポイント時間,検定管理時間が決められている。
【表3】
【0188】
例えば、直流電流5A以下検出からスイッチd1オフまでの時間が、4000ms〜4200msでなければならない場合の良否判定は、
検定ポイント時間が3990msの場合は否、
検定ポイント時間が4000msの場合は良、
検定ポイント時間が4200msの場合は良、
検定ポイント時間が4210msの場合は否、
検定ポイント時間が−10msの場合は否である。
【0189】
本実施例によれば、さらに、充電電流許容誤差(充電電流指令値に対する計測電流値の誤差),計測誤差(計測電流値と現在出力電流値との誤差,計測電圧値と現在出力電圧値との誤差)の検定を行うこともできる。
【0190】
例えば、CHAdeMOの仕様によれば、充電電流許容誤差,計測誤差の基準値は、表4に示すように定められている。基準値内である場合には、判定は良である。
【表4】
【0191】
表4において、現在出力電流値,現在出力電圧値は、充電器10が充電出力を開始した後に、CAN信号によって充電器10から車両模擬装置30に送られる数値データである。
【0192】
良否判定は、例えば、
充電電流指令値が20Aの場合に、計測電流値が19.81Aであれば良、
充電電流指令値が50Aの場合に、計測電流値が50.19Aであれば良、
充電電流指令値が60Aの場合に、計測電流値が60.00Aであれば良、
充電電流指令値が125Aの場合に、計測電流値が125.38Aであれば良、
計測電流値が125Aの場合に、現在出力電流値が124.90Aであれば良である。
【0193】
(表示処理動作)
パソコン420のディスプレイ426への表示処理について、模擬シーケンス動作中および模擬シーケンス動作後について、それぞれ説明する。
【0194】
模擬シーケンス動作中のディスプレイへの表示
・タイミングチャート
メモリに格納された複数種類のデータから所定のデータを選択して100mSの周期で読出し、時間軸を共通にしたタイミングチャートを作成し、ディスプレイ426に表示させる。オペレータは、このようなタイミングチャートにより、模擬動作中のシーケンスを視覚的に同時に確認できる。
【0195】
・ログメッセージ
車両模擬装置30からパソコン420に通信されるログメッセージは、ディスプレイ426に表示される。オペレータは、表示されたログメッセージを見て、模擬シーケンスの動作を逐一確認することができる。
【0196】
模擬シーケンス動作後のディスプレイへの表示
・検定結果レポート
充電器10の充電シーケンスの応答タイミングの検定結果、および充電電流許容誤差,計測誤差の検定結果を、表形式でディスプレイに表示する。これにより、オペレータは、検定結果を確認できる。
【0197】
・実施した模擬動作パターン
パソコン420で設定された模擬動作パターンを、ディスプレイ426に表示する。オペレータは、実施されている模擬動作パターンをディスプレイ上で確認できる。
【0198】
・タイミングチャート
オペレータは、検定結果を見て、状況を確認したい場合がある。例えば、検定結果は「良」であったが、微妙なタイミングの信号状況を見て、パラメータを変更したらどうなるかを、検証してみる。あるいは、電圧,電流の挙動は、どのようであったかを検証する。また、検定結果が「否」の場合に、その状況を検証する等である。
【0199】
以上のような場合、メモリに格納されている複数種類のデータの中から所定のデータを選択して読出し、時間軸を共通にしたタイミングチャートを作成し、ディスプレイ426に表示させる。
【0200】
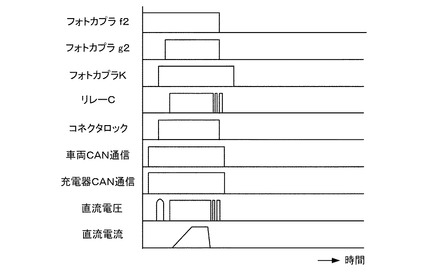
一例として、フォトカプラf2のオン/オフ状態(スイッチd1のオン/オフ状態に対応)、フォトカプラg2のオン/オフ状態(スイッチd2のオン/オフ状態に対応)、フォトカプラkのオン/オフ状態(フォトカプラjのオン/オフ状態に対応)、充電リレーcのオン/オフ状態(スイッチe2のオン/オフ状態に対応)、コネクタロック状態(ロックから解除まで)、車両模擬装置側のCAN通信状態(CAN通信開始から終了まで)、充電器側のCAN通信状態(CAN通信開始から終了まで)、直流電源ラインの直流電圧,直流電圧を、時間軸を共通にして表示したタイミングチャートを、図10に示す。
【0201】
・タイミングチャート上のカーソル位置の表示項目の値
例えば、図10の直流電圧にカーソルを移動し、カーソルの位置の電圧値を表示させる。これにより、どの時刻に何ボルトの電圧が計測されたのかを確認できる。
【0202】
・検定ポイント時間拡大チャート
例えば、図10において、車両CAN通信開始から充電器CAN通信開始までの検定ポイント時間を拡大表示させる。
【0203】
・相対時間確認タイミングチャート
例えば、図10において、2本のカーソルを移動し、カーソル間の相対時間を確認する。
【0204】
(データ出力・保存処理)
ディスプレイ426に表示された表あるいはチャートは、プリンタ428で出力することもできる。また、全データを、ファイルに保存し、必要なときに取出すことができる。
【0205】
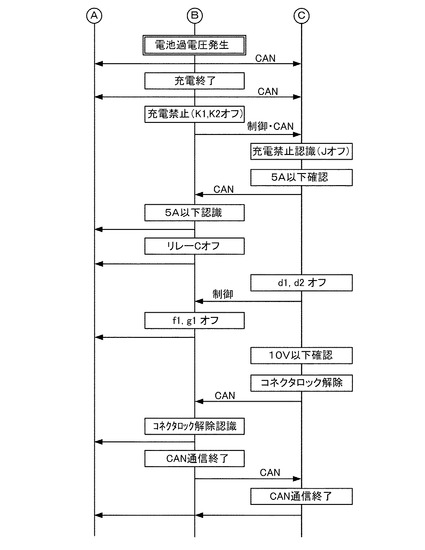
以上の実施例は、模擬動作シーケンスが車両充電完了で正常終了する場合(パターン1)であったが、充電中に充電器異常で異常終了する場合(パターン6)の一例として、電池過電圧(充電中に車載電池の上限電圧に到達)が発生した場合の模擬動作シーケンスを、図11A,図11Bに示す。
【0206】
この模擬動作シーケンスによれば、図8Bの模擬シーケンスの「充電終了」のステップ前に「電池過電圧発生」のステップが挿入されるのみであり、その他のステップは、同じである。
【0207】
車両模擬装置30は、電池過電圧発生を、CAN信号により、充電器10のシーケンス制御部104に通知する。車両模擬装置30の制御ユニット330の処理部334は、CAN信号により、充電終了を充電器10のシーケンス制御部104に通知する。以降のシーケンスは、図8Bと同じである。
【符号の説明】
【0208】
10 充電器
12 チョッパ回路
13 直流/直流・変換回路
14 インバータ/整流器
20 充電器検定装置
30 車両模擬装置
40 制御処理装置
50 交流電源
60a 給電コネクタ
60b 受電コネクタ
102 パワーユニット
104 シーケンス制御部
106 給電ケーブル
110,310 直流電源ライン
112,312 信号ライン
114 充電開始ボタン
116 充電停止ボタン
316 計測ライン
320 回生負荷ユニット
322 可逆型交直変換器
324 シーケンス制御部
330 制御ユニット
340 計測ユニット
350 データ収集ユニット
402 制御部
404 メモリ
406 パラメータファイル
408 パラメータ設定部
410 検定部
412 表示処理部
414 入力部
416 出力部
420 パソコン
422 パソコン本体
424 キーボード
426 ディスプレイ
428 プリンタ
【技術分野】
【0001】
本発明は、移動体に搭載される電池を直流充電する充電器が基準に適合するか否かを検定するとともに、データを表示出力する充電器検定装置、および充電器検定装置に含まれる移動体模擬装置に関する。
【背景技術】
【0002】
充電器が、モータなどの電動機による駆動機構を含む移動体(以下、単に、移動体という)、例えば電気自動車の車載電池を充電する場合、
(1)充電器の給電ケーブルと電気自動車とがコネクタで接続され、充電器の充電開始ボタンが押されると、充電器から電気自動車へ制御信号を出力し、充電器に接続されたことが電気自動車に通知され、
(2)電気自動車は、充電器に接続されたことを通知されると、電気自動車から充電器へ通信を開始し、電気自動車に接続されたことが充電器に通知され、
(3)充電器から電気自動車へ通信を開始し、
(4)電気自動車は、充電可能であることを充電器に通知し、
(5)充電器は、充電電流を送る直流電源ラインの絶縁確認を行い、
(6)絶縁確認終了後、充電器から電気自動車へ制御信号を送信し、充電器が充電可能状態になったことを電気自動車に通知し、
(7)電気自動車は充電リレーをオンし、充電器を車載電池に接続し、
(8)電気自動車は、充電電流指令値を充電器に通知し、
(9)充電器は、通知された充電電流指令値に従って、充電電流を流す。
【0003】
このように、充電器は、電気自動車との間で、信号ラインを経て相互に通信しながら、車載電池に充電電流を供給し充電している。
【0004】
充電器は、所定の基準である充電方式、例えばCHAdeMO方式仕様に適合するように製作される。製作された充電器は、出荷前に、CHAdeMO方式仕様に従って充電シーケンスを実行しているか否かの検定が行われる。
【0005】
実車両が無い状態で充電器の充電シーケンスを確認するためには、充電器に対する車両のシーケンスを模擬する車両模擬装置を、用意する必要がある。
【0006】
従来の車両模擬装置では、直流電源ラインに切換接続可能な直流電源および抵抗負荷を用いて、車載電池を模擬している。直流電源は、充電リレーがオンされる前に直流電源ラインに切換え接続され、充電リレーのオン時に、充電器に対して充電前の車載電池の電圧を模擬する。充電器は、この電圧を検出することによって、充電リレーのオンを認識する。
【0007】
充電時には、車両模擬装置において充電器への充電電流の指令値を設定する。一方、抵抗負荷が直流電源ラインに切換え接続され、充電器からの直流出力を抵抗負荷で消費させている。
【0008】
このような車両模擬装置を利用した従来の充電器検定装置では、充電器と車両模擬装置との間で通信される信号(CHAdeMO方式では、CAN(Controller Area Network)信号および制御信号)と、抵抗負荷に印加される直流電圧/直流電流とを同時に観察している。このため、CAN信号アナライザ,オシロスコープ,電圧計/電流計を車両模擬装置に接続して、観察データを同時にプリントアウトし、仕様に従って充電シーケンスが実行されているか否かを検定している。
【発明の概要】
【発明が解決しようとする課題】
【0009】
従来の車両模擬装置では、充電器からの直流出力を抵抗負荷で消費させているので、電力消費が大きいという問題がある。また、模擬車載電池の電圧/電流・条件によって、抵抗負荷の抵抗値の変更が必要になる。この変更は、手動で行わなければならない、という不便さがある。さらに、充電器への充電電流の指令値の設定は、その都度入力しなければならない、という不便さがある。
【0010】
また、従来の充電器検定装置では、CAN信号アナライザ,オシロスコープ,電圧計/電流計で個別に観察されたデータを、プリントアウトしても、データを同時に確認することは、難しかった。したがって、CHAdeMO方式のような仕様に適合しているか否かの検定に時間がかかるという問題があった。
【0011】
このような問題は、電気自動車のみならず、ハイブリッド車,電気スクータ,電気機関車,電気モータボートなどの移動体にも生じ得る。
【0012】
本発明の目的は、抵抗負荷を用いることなく、消費電力を少なくすることができ、かつ、充電電流の指令を予め設定できる移動体模擬装置を提供することにある。
【0013】
本発明の他の目的は、データの同時収集およびデータの同時出力を確保しながら、短時間で検定を可能にする充電器検定装置を提供することにある。
【課題を解決するための手段】
【0014】
本発明の移動体模擬装置は、
交流電源の交流を直流に変換し、移動体の搭載電池を充電する充電器に接続され、前記充電器に対する車両のシーケンスを模擬する移動体模擬装置であって、
前記充電器の出力する充電電流が流れる直流電源ラインと、
前記充電器との間で通信される種々の信号が流れる信号ラインと、
前記直流電源ラインに挿入されて移動体の充電リレーを模擬し、前記信号ライン上の前記種々の信号の一つである、前記充電器からの信号によりオン・オフされるリレーと、
前記搭載電池を模擬する可逆型の直流/交流・変換器を有し、前記直流/交流・変換器の直流側端子が前記リレーに接続された回生負荷ユニットと、
前記信号ラインに接続され、前記充電器と通信するとともに、前記回生負荷ユニットを制御して、前記充電器に対する移動体の模擬シーケンスを実行する制御ユニットと、
前記直流電源ライン上の計測された電圧値および電流値と、前記信号ライン上の前記種々の信号とを、データとして収集するデータ収集ユニットとを備え、
前記直流/交流・変換器の交流側端子は、前記交流電源に接続され、
前記直流/交流・変換器は、
前記リレーがオンされる前に、前記交流電源の交流を直流に変換して前記直流側端子に直流電圧を出力し、充電前の搭載電池の電圧を模擬し、
前記リレーがオンされた後に、前記充電器からの直流を交流に変換し、前記直流側端子の直流電圧が充電時の搭載電池の電圧を模擬し、変換された交流を前記交流側端子から前記交流電源に回生する。
【0015】
本発明の充電器検定装置は、
前記移動体模擬装置と、
前記移動体模擬装置の前記制御ユニットおよび前記データ収集ユニットに接続された、制御処理装置とを備え、
前記制御処理装置は、
前記移動体模擬装置の制御ユニットに、パラメータを設定し、
設定された前記パラメータに従って実行された、前記充電器に対する移動体の模擬シーケンスが終了したときに、前記データ収集ユニットが収集した前記データに基づいて、前記充電器の充電シーケンスの応答タイミングが、所定の基準に適合しているか否かを検定し、検定結果を表形式で表示出力する。
【発明の効果】
【0016】
本発明の移動体模擬装置によれば、充電器の直流出力を、可逆型の直流/交流・変換器を用いた回生負荷ユニットにて、交流出力に変換し、充電器の交流入力電源に回生させるので、消費電力が少なくて済む。
【0017】
また、本発明の移動体模擬装置によれば、充電電流指令パターンを予め設定しておくので、充電器の充電電流を、この指令パターンに追従させることができる。
【0018】
本発明の充電器検定装置は、移動体模擬装置の模擬シーケンス動作中に、データを同時収集し、収集されたデータを解析し、基準と照合することによって、充電器の検定を行い、検定結果を表示出力するので、短時間で検定が可能になる。
【0019】
また、本発明の充電器検定装置によれば、データを同時出力表示できるので、検定結果の検証が可能となる。
【図面の簡単な説明】
【0020】
【図1】本発明の充電器検定装置の基本構成を示すブロック図である。
【図2】可逆型交直変換器の構成を示すブロック図である。
【図3】充電器検定装置の概略的な動作フローを示す図である。
【図4】制御処理装置をパーソナルコンピュータで構成した充電器検定装置を示す図である。
【図5】CHAdeMO方式で定める充電器と電気自動車の接続シーケンス回路を示す図である。
【図6】CHAdeMO方式で定める充電器と充電器検定装置の接続シーケンス回路を示す図である。
【図7】模擬動作パターンを示す図である。
【図8A】模擬動作のフローを示す図である。
【図8B】模擬動作のフローを示す図である。
【図9】CAN通信データの一覧を示す図である。
【図10】タイミングチャートを示す図である。
【図11A】故障が発生した場合の模擬動作シーケンスを示す図である。
【図11B】故障が発生した場合の模擬動作シーケンスを示す図である。
【発明を実施するための形態】
【0021】
以下の実施の形態は、移動体が電気自動車である場合について、代表的に説明する。
【0022】
[充電器検定装置の基本構成]
図1に示すように、被検定対象である充電器10を検定する充電器検定装置20は、車両模擬装置30と、制御処理装置40とから構成される。
【0023】
以下、充電器10,車両模擬装置30,制御処理装置40のそれぞれについて、説明する。
【0024】
(充電器)
充電器10は、交流電源50の交流を直流に変換するパワーユニット102と、パワーユニット102を制御するシーケンス制御部104とを備えている。
【0025】
充電器10から延びる給電ケーブル106の先端の給電コネクタ60aは、車両模擬装置30の受電コネクタ60bに接続される。給電ケーブル106は、直流電源ライン110と、信号ライン112とを含んでいる。
【0026】
直流電源ライン110は、充電器10のパワーユニット102から直流出力を車載電池に供給するラインである。
【0027】
信号ライン112は、充電器10と車両との間で通信される信号を送受するラインである。図では、信号ライン112を1本の線で示しているが、物理的に1本の信号線を示すものではなく、複数本の信号線を総称するものとして、用いている。CHAdeMO方式では、信号ラインは、CAN(Controller Area Network)信号ラインと制御信号ラインとを含んでいる。
【0028】
充電は、充電器10の充電開始ボタン114がオンされると開始する。充電途中で、充電を停止したい場合には、充電停止ボタン116をオンする。
【0029】
(車両模擬装置)
車両模擬装置30は、実車両が無い状態で充電器10の充電シーケンスを確認するために、充電器10に対する車両のシーケンスを模擬する装置である。
【0030】
車両模擬装置30には、給電ケーブル106の給電コネクタ60aに結合される受電コネクタ60bが、設けられている。受電コネクタ60bからは、車両模擬装置30の直流電源ライン310,信号ライン312が延びている。
【0031】
信号ライン312は、充電器10側の信号ライン112と同様に、物理的に1本の信号線を示すものではなく、複数本の信号線を総称するものとして、用いている。CHAdeMO方式では、信号ラインは、CAN信号ラインと制御信号ラインとを含んでいる。
【0032】
給電ケーブル106の給電コネクタ60aが、受電コネクタ60bに結合されると、充電器10側の直流電源ライン110,信号ライン112は、車両模擬装置30側の直流電源ライン310,信号ライン312に、接続される。
【0033】
車両模擬装置30は、さらに、充電リレー314と、回生負荷ユニット320と、制御ユニット330と、計測ユニット340と、データ収集ユニット350とを備えている。
【0034】
・充電リレー
充電リレー314は、直流電源ライン310に挿入され、車両の充電リレーを模擬するものである。
【0035】
・回生負荷ユニット
回生負荷ユニット320は、充電リレー314に接続され、車載電池を模擬するものである。この回生負荷ユニット320は、交流と直流とを可逆的に変換可能な交流/直流・変換器(以下、可逆型交直変換器という)322と、可逆型交直変換器322の動作を制御するシーケンス制御部324とを有している。
【0036】
図2に、可逆型交直変換器322の構成を示す。図2に示すように、可逆型交直変換器322は、チョッパ回路12,直流/直流・変換回路13,インバータ/整流器14で構成される。インバータ/整流器14は、一つの素子で構成され、インバータ動作,整流器動作の切換えは、シーケンス制御部324の制御によって行われる。
【0037】
可逆型交直変換器322の直流側端子17は、充電リレー314に接続され、交流側端子18は交流電源50に接続される。
【0038】
・制御ユニット
制御ユニット330は、回生負荷ユニット320を制御するとともに、信号ライン312を経て充電器10のシーケンス制御部104と通信して、車両のシーケンスを模擬する。
【0039】
充電器10に対する車両のシーケンスを模擬するために、車両模擬装置30の制御ユニット330には、制御処理装置40でパラメータ設定された、模擬動作パターン,充電電流指令パターン,電圧指令パターンが入力される。
【0040】
制御ユニット330は、さらに、回生負荷ユニット320に、運転/停止・信号を入力する。
【0041】
制御ユニット330は、少なくともA/Dコンバータ332,処理部334,メモリ336を含んで構成される。このような制御ユニット330は、マイクロコンピュータで実現される。したがって、制御ユニット330は、回生負荷ユニット320をプログラマブルに制御できる。
【0042】
A/Dコンバータ332は、計測ユニット340からの、直流電源ライン310上の電流値,電圧値(アナログ信号)を、デジタル信号にA/D変換し、処理部334に送る。処理部334は、充電器10,制御処理装置40と通信し、および回生負荷ユニット320を制御する。
【0043】
・データ収集ユニット
データ収集ユニット350は、信号ライン312上の信号、および直流電源ライン310上の電圧値,電流値を、データとして収集する。このためには、信号ライン312はデータ収集ユニット350に接続され、直流電源ライン310は、計測ライン316および計測ユニット340を介して、データ収集ユニット350に接続される。電圧値は、直流電源ライン310に計測ライン316を接続することにより、電流値は、直流電源ライン310に設けた変成器318を計測ライン316に接続することにより、取出される。
【0044】
データ収集ユニット350は、少なくともA/Dコンバータ352,処理部354,メモリ356を含んで構成される。このようなデータ収集ユニット350は、マイクロコンピュータで実現される。
【0045】
A/Dコンバータ352は、計測ユニット340を経た、直流電源ライン310上の電流値,電圧値をA/D変換し、処理部354に送る。信号ライン312上のデジタル信号は、処理部354に送られる。処理部354に送られたデジタル信号は、処理部354で区分けされて、メモリ356にデータとして格納される。
【0046】
メモリ356に格納されたデータは、模擬シーケンスの実行中にメモリ356から読出され、制御処理装置40に転送される。
【0047】
・計測ユニット
計測ユニット340は、直流電源ライン310とデータ収集ユニット350との間を絶縁し、電流値,電圧値をデータ収集ユニット350および制御ユニット330に送る。
【0048】
(制御処理装置)
制御処理装置40は、制御部402,メモリ404,パラメータファイル406,パラメータ設定部408,検定部410,表示処理部412,入力部414,出力部416を備えている。
【0049】
このような制御処理装置40は、パーソナルコンピュータで実現される。この場合、制御部402,パラメータ設定部408,検定部410,表示処理部412の各機能は、CPUで実行されるプログラムで実現される。
【0050】
・制御部
制御部402は、車両模擬装置30の模擬シーケンス動作を制御するために、車両模擬装置30の制御ユニット330と通信する。
【0051】
制御部402は、また、データ収集ユニット350と通信し、データ収集ユニット350から転送されてくるデータをメモリ404に格納する。
【0052】
制御部402は、また、パラメータ設定部408,検定部410,表示処理部412の動作を制御する。
【0053】
・メモリ
メモリ404は、データ収集ユニット350からの収集データ、検定部410の検定結果、およびCPUで実行されるプログラムが格納される。
【0054】
・パラメータファイル
パラメータファイル406には、模擬動作パターン,充電電流指令パターン,電圧指令パターンが、予め記述される。
【0055】
模擬動作パターンは、充電器に対する車両の応答シーケンスを模擬するパターンである。
【0056】
充電電流指令パターンは、充電器へ指令する充電電流のパターンであり、電流指令値と時間情報とで定められる。
【0057】
電圧指令パターンは、車載電池の充電時の電圧を模擬するパターンであり、電圧指令値と時間情報とで定められる。
【0058】
これらのパラメータは、制御処理装置40においてプログラム処理で作成されるが、パラメータの作成方法は、本発明の特徴ではないので、説明は省略する。
【0059】
パラメータファイル406は、実際には、メモリ404に作成される。
【0060】
・パラメータ設定部
パラメータ設定部408は、入力部414からの選択指示により、模擬動作パターン,充電電流指令パターン,電圧指令パターンを、パラメータファイル406から選択して、車両模擬装置30の制御ユニット330に設定する。設定されたパラメータは、制御ユニット330のメモリ336に格納される。
【0061】
パラメータ設定部408は、ファイル406から選択したパラメータを、入力部414からの指示により変更することもできる。
【0062】
・検定部
検定部410は、車両模擬装置30の模擬動作中に、データ収集ユニット350で収集され、転送されてきたデータに基づいて、模擬動作終了後に充電器10の充電シーケンスの応答タイミングが基準に適合するか否か、および計測された電圧値,電流値が基準に定められた精度に入っているか否かを検定する。検定結果は、メモリ404に格納される。
【0063】
したがって、検定部410には予め基準を入力しておく。このような基準は、CHAdeMO方式の仕様、あるいはユーザが独自に規定した基準であってもよい。
【0064】
・表示処理部
表示処理部412は、メモリ404から検定結果を読出し、表形式に作成し、出力部416に表示させる。また、メモリ404から収集データを選択して読出し、時間軸を共通にしたタイミングチャートを作成する。タイミングチャートは、模擬シーケンス動作中にほぼリアルタイムで表示したり、模擬シーケンスが終了した後に表示することができる。
【0065】
・出力部
出力部416は、表示処理部412で形成されたタイミングチャートおよび表を出力表示する。
【0066】
・入力部
入力部414は、制御部402へ各種の指示を入力する。
【0067】
以上のような構成の制御処理装置40は、前述したようにパーソナルコンピュータで実現される。制御部402,パラメータ設定部408,検定部410,表示処理部412の各機能は、CPUで実行されるプログラムで実現される。入力部414は例えばキーボード、出力部416は例えばディスプレイおよびプリンタである。
【0068】
[充電器検定装置の基本動作]
図3に示される概略的な動作フローに従って、図1の充電器検定装置20の基本動作を説明する。
【0069】
(パラメータ設定)
充電器検定装置20のオペレータは、充電器10の給電コネクタ60aを車両模擬装置30の受電コネクタ60bに接続する。
【0070】
オペレータは、制御処理装置40の入力部414から、制御部402にパラメータ(模擬動作パターン,充電電流指令パターン,電圧指令パターン)の選択を指示し検定開始ボタンを押す(ステップS1)。ここに、検定開始とは、続く模擬シーケンス動作,検定動作を含む一連の動作の開始を意味するものとする。なお、検定開始ボタンは、入力部414であるキーボード上の一つのキーである。
【0071】
制御部402は、選択されたパラメータの設定をパラメータ設定部408に指示する。
【0072】
パラメータ設定部408は、パラメータファイル406からパラメータを取得し、車両模擬装置30の制御ユニット330に設定する。設定されたパラメータは、メモリ336に格納される。
【0073】
(模擬シーケンス動作)
車両模擬装置30の制御ユニット330の処理部334は、設定された充電電流指令パターン,電圧指令パターンに従い、回生負荷ユニット320を運転状態にする。
【0074】
回生負荷ユニット320の可逆型交直変換器322は、シーケンス制御部324によって、インバータ/整流器14の切換えが行われる。制御ユニット330で、電圧指令パターンの電圧指令値と、計測ユニット340からの計測電圧値との大小関係を判定し、判定結果によって、シーケンス制御部324を指示する。
電圧指令値 ≧ 計測電圧値 の場合、整流器動作
電圧指令値 < 計測電圧値 の場合、インバータ動作
【0075】
オペレータは、続いて、充電器10の充電開始ボタン114をオンする(ステップS2)。充電開始ボタン114がオンされると、充電開始ボタン114のオンが車両模擬装置30の制御ユニット330に通知され、模擬シーケンス動作が開始される(ステップS3)。
【0076】
充電開始ボタン114のオン後に、回生負荷ユニット320のシーケンス制御部324は、電圧指令値≧計測電圧値であるので、可逆型交直変換器322のインバータ/整流器14を、整流器動作に切換える。交流電源50からの交流は、インバータ/整流器14,直流/直流・変換回路13,チョッパ回路12により直流に変換されて、直流側端子17に直流電圧が出力される。この直流電圧は、充電前の車載電池の電圧を模擬する。
【0077】
充電器10のシーケンス制御部104と、車両模擬装置30の制御ユニット330との間で、信号ライン112,312を経て通信が開始される。
【0078】
車両模擬装置30の制御ユニット330は、信号ライン312,112を経て、充電器10のシーケンス制御部104に充電許可を通知する。
【0079】
充電器10は絶縁試験後、信号ライン112,312を経て車両模擬装置30の制御ユニット330に充電準備完了を通知する。
【0080】
車両模擬装置30の制御ユニット330は、充電器10の充電準備完了を認識して、充電リレー314をオンする。これにより、充電器10のパワーユニット102には、直流電源ライン110,310を経て、可逆型交直変換器322の直流電圧が印加され、充電器10のシーケンス制御部104は、充電リレー314のオンを認識する。
【0081】
車両模擬装置30の制御ユニット330は、充電電流指令パターンをメモリ336から読出して、信号ライン312,112を経て、充電器10のシーケンス制御部104に通知する。他方、制御ユニット330は、メモリ336から電圧指令パターンを読出し、電圧指令パターンを、回生負荷ユニット320のシーケンス制御部324に通知する。
【0082】
充電器10のパワーユニット102は、シーケンス制御部104の制御に従って、充電電流指令パターンに応じた充電電流を発生する。充電電流は、直流電源ライン110,310を経て、回生負荷ユニット320の可逆型交直変換器322に供給される。回生負荷ユニット320のシーケンス制御部324は、電圧指令値<計測電圧値であるので、可逆型交直変換器322のインバータ/整流器14を、インバータ動作に切換える。
【0083】
可逆型交直変換器322は、直流電流である充電電流を引込み、チョッパ回路12,直流/直流・変換回路13,インバータ/整流器14により、直流を交流に変換する。このとき、可逆型交直変換器322の直流側端子17の電圧は、電圧指令パターンの電圧指令値に保持される。すなわち、定電圧制御される。これにより、充電時の車載電池の電圧を模擬する。変換された交流は、交流側端子18から交流電源50に回生される。
【0084】
模擬シーケンス動作中に、信号ライン312上の信号がデータ収集ユニット350にデータとして収集され、および直流電源ライン310上の計測された計測電圧値,計測電流値が、計測ユニット340を経て、データ収集ユニット350にデータとして収集される(ステップS4)。
【0085】
データ収集ユニット350では、A/Dコンバータ352が、直流電源ライン310上の電圧値,電流値をA/D変換して、処理部354に送る。信号ライン312上のデジタル信号は、A/Dコンバータ352を経ることなしに処理部354に送られる。処理部354で各データの仕分けを行い、データごとにメモリ356に格納していく。
【0086】
データ収集ユニット350は、メモリ356に格納されたデータを、模擬シーケンス動作中に、制御処理装置40の制御部402に転送する。転送されたデータは、メモリ404に格納される。
【0087】
車両模擬装置30の模擬シーケンス動作が全て終了すると(ステップS5)、模擬装置30の制御ユニット330は、回生負荷ユニット320を運転停止状態にする。
【0088】
制御処理装置40の制御部402は、検定部410に検定を指示する。検定部410は、メモリ404からデータを読出して、データ解析を行い検定を実施する(ステップS6)。
【0089】
データ解析により、基準で定められている充電器10の充電シーケンスが遵守しなければならない管理時間と対応する検定ポイント時間を求める。検定ポイント時間は、充電器10の充電シーケンスの特定のステップから特定のステップに至る時間として、定義される。
【0090】
解析された検定ポイント時間を、基準で定められている管理時間(以下、検定管理時間という)と照合することによって、充電器10の充電シーケンスが基準に適合するか否かを検定し、良否を示す検定結果を制御部402に通知する。検定結果は、メモリ404に格納される。
【0091】
検定部410は、さらに、計測された電圧値,電流値の誤差が、基準で定める精度内にあるか否かを検定し、良否を示す検定結果を制御部402に通知する。検定結果は、メモリ404に格納される。
【0092】
(表示動作)
制御処理装置40の出力部416であるディスプレイには、検定結果を示す表のみならず、検定結果を検証するためのタイミングチャート、模擬シーケンス動作を確認できるタイミングチャート、模擬シーケンス動作中のログメッセージ等を表示する。
【0093】
・検定結果レポート
制御処理装置40の制御部402は、表示処理部412に検定結果を表形式で作成させる(ステップS7)。表示処理部412で作成された表形式の検定結果レポートは、出力部414のディスプレイ上に表示される(ステップS8)。オペレータは、検定結果をディスプレイ上で、確認することができる。また、出力部416のプリンタに出力させることもできる。
【0094】
・検定結果を検証するためのデータのタイミングチャート
オペレータは、検定結果からデータの発生タイミングや、データの状況などを検証したい場合がある。このため、制御処理装置40の制御部402は、検証したいデータをメモリ404から選択して読出し、表示処理部412に送る。表示処理部412では、各データを、時間軸を共通にしたタイミングチャートに作成し(ステップS7)、出力部416に表示する(ステップS8)。また、プリンタに出力させることもできる。
【0095】
・検定結果を検証するためのデータの表形式表示
模擬動作終了後に、オペレータは、検定結果を検証するために、データを表形式で出力部416に表示することもできる(ステップS7,S8)。
【0096】
・模擬シーケンス動作を確認するためのデータのタイミングチャート
模擬シーケンス動作中に模擬シーケンス動作の進行状況を確認するために、所定のデータをデータ収集ユニット350のメモリ356から読出して、制御処理装置40の表示処理部412に送る。表示処理部412では、各データを時間軸を共通にしたタイミングチャートに作成し、ディスプレイ上に表示することもできる(ステップS7,S8)。これにより、オペレータは、模擬シーケンスの進行中のデータの状況を同時に確認することができる。
【0097】
・ログメッセージ表示
模擬動作中、車両模擬装置30から制御処理装置40に通信されるログメッセージは、制御処理装置40の制御部402に送られ、出力部416に表示される。オペレータは、表示されたログメッセージを見て、模擬シーケンスの動作を逐一確認することができる。
【0098】
以上の表示は、代表的なものであり、これらに限定されるものではなく、データを加工して、検証に必要な種々の表,タイミングチャートを作成し、表示することができる。さらには、実施した模擬動作パターンを表示するようにしてもよい。
【実施例1】
【0099】
以下、充電方式基準がCHAdeMO方式仕様の場合の充電器検定装置の実施例を説明する。なお、CHAdeMO方式仕様は、充電を例えば数十分の短時間で行う急速充電器について規定する。本実施例は、実施の形態の一例を示すものであり、本発明を急速充電器に限定することを、意図するものではない。
【0100】
図4は、図1の制御処理装置40をパーソナルコンピュータ(以下、パソコンという)で構成した例である。図1と同一の構成要素には、同一の参照番号を付して示す。
【0101】
充電器10の交流電源50には、商用系統の3相200Vの交流電源を用いるものとする。
【0102】
また、充電器10の充電方式は、定電流充電方式であるものとする。すなわち、車両模擬装置30から指令される充電電流指令パターンに応じて充電電流を出力する。
【0103】
パソコン420は、パソコン本体422,キーボード424,ディスプレイ426,プリンタ428で構成される。
【0104】
充電器10のシーケンス制御部104と、車両模擬装置30の制御ユニット330とを接続する信号ライン112,312は、CAN通信情報(以下、CAN信号という)を伝送するCAN信号ライン112a,312aと、後述するシーケンス回路を動作する信号(以下、制御信号という)を伝送する制御信号ライン112b,312bとで構成される。
【0105】
CAN信号は、CHAdeMO方式仕様によれば、数値,状態フラグ,故障フラグを含む。数値は、充電電流指令値,現在出力電流値,現在出力電圧値等の数値データである。状態フラグは、例えば充電許可状態を示すフラグ(車両充電可能)であり、充電許可は"1"に、充電禁止は"0"に設定される。故障フラグは、例えば車載電池の電圧状況を示す状態フラグ(電池過電圧)を示すフラグであり、異常時は"1"に、正常時は"0"に設定される。
【0106】
CAN信号ライン312aおよび制御信号ライン312bは、それぞれ、車両模擬装置30のデータ収集ユニット350に接続される。
【0107】
データ収集ユニット350には、さらに、直流電源ライン310が、計測ライン316,計測ユニット340を介して、接続される。
【0108】
パソコン420は、車両模擬装置30の制御ユニット330およびデータ収集ユニット350に、それぞれシリアル通信ライン317,318を経て接続される。
【0109】
CHAdeMO方式仕様によれば、充電器側および車両側に、それぞれシーケンス回路108,338を備えている。図5に、CHAdeMO方式仕様で定めるシーケンス回路を示す。
【0110】
図5に示すように、充電器側のシーケンス回路108は、スイッチd1,d2と、フォトカプラjとを有している。
【0111】
車両側のシーケンス回路338は、フォトカプラf,g,hおよびスイッチkを有している。
【0112】
充電リレーc(図1の充電リレー314に同じ)は、コイル用スイッチeを含んでいる。スイッチeがオン/オフすると、充電リレーcがオン/オフする。図4,図5において、参照記号iは、リレーコイルを示す。
【0113】
シーケンス回路108は、充電器10のシーケンス制御部104内に設けられている。
【0114】
本実施例の充電器検定装置20では、図4に示すように、シーケンス回路338を、車両模擬装置30の制御ユニット330内に設ける。
【0115】
データ収集ユニット350が制御信号を収集する必要があるため、スイッチe、フォトカプラf,g、およびスイッチkに、それぞれ1:1に対応したフォトカプラを含むシーケンス回路358を、データ収集ユニット350内に設ける。図6は、シーケンス回路108,338,358を示すシーケンス回路図である。
【0116】
図6では、制御ユニット330のシーケンス回路338において、フォトカプラf,gをf1,g1で、スイッチkをk1で示す。
【0117】
データ収集ユニット350のシーケンス回路358において、スイッチe、フォトカプラf1,g1、スイッチk1に、それぞれ、1:1に対応するフォトカプラを、e2,f2,g2,k2で示す。
【0118】
これらのシーケンス回路108,338,358とスイッチeとは、図4に示すように、制御信号ライン312bで相互に接続されている。したがって、制御信号ライン312b上の制御信号を収集することは、データ収集ユニット350のシーケンス回路358のフォトカプラのオン/オフ情報を収集すればよいことになる。
【0119】
以下、本実施例の充電器検定装置20の動作を、模擬動作、回生負荷ユニットの動作、データ収集ユニットの動作、検定動作などに区分して説明する。
【0120】
(模擬動作)
充電器検定装置20のオペレータは、充電器10の給電コネクタ60aを、車両模擬装置30の受電コネクタ60bに接続する。
【0121】
オペレータは、パソコン420において、キーボード424から、パラメータ(模擬動作パターン,充電電流指令パターン,電圧指令パターン)の選択を指示する。パソコン420は、選択されたパラメータを、車両模擬装置30の制御ユニット330に設定する。
【0122】
模擬動作パターンは、車両の応答シーケンスを模擬するものであり、停止要素や状況,条件によって、図7に示す7種類のパターンが準備される。
【0123】
パターン1は、車両の充電完了で、停止へ移行するパターンである。
パターン2は、充電タイムアップもしくは停止ボタンで、停止へ移行するパターンである。なお、停止とは、模擬動作を停止させる充電器上の充電停止ボタン116を押しての停止を意味する。
パターン3は、充電開始前の車両異常発生で、停止へ移行するパターンである。
パターン4は、充電開始前の充電器異常発生で、停止へ移行するパターンである。
パターン5は、充電中の車両異常発生で、停止へ移行するパターンである。
パターン6は、充電中の充電器異常発生で、停止へ移行するパターンである。
パターン7は、車両応答の遅れにより充電器がタイムアウトをして、停止へ移行するパターンである。
【0124】
充電開始前の車両異常は、例えば、充電開始前に車載電池電圧が直流電源ラインに印加されない異常である。
【0125】
充電開始前の充電器異常は、例えば、充電器内部で発生する異常である。
【0126】
充電中の車両異常は、例えば充電中に車載電池の下限電圧に到達する異常(電池不足電圧)、充電中に車載電池の温度上限に達する異常(電池温度高)、充電中にシフトレバー位置が車両の移動可能位置に変更される異常(車両シフト位置)、充電中に充電器からCAN信号が送られてこない異常(車両その他故障)等である。
【0127】
充電中の充電器異常は、例えば、充電中に車載電池の上限電圧に到達する異常(電池過電圧)、充電電流指令値に充電器の出力が追随しない異常(電池電流差異)、充電器の現在出力電圧値が車両の電池電圧と異なる異常(電圧差異)、充電中に車載電池の温度上限に達する異常(電池温度高)である。
【0128】
タイムアウトとは、車両応答に過度な遅延が生じ、タイムアウト時間内に車両応答がない場合に、車両に異常が発生したと充電器が判断することである。
【0129】
パターン1〜6では、充電器のシーケンス動作に対する車両側の応答タイミングは、車両側が遵守しなければならない全てのシーケンスの応答タイミングが仕様(標準仕様書)で定義された時間内であれば、シーケンス毎に0.1秒単位で任意に設定される(任意設定)。これは、車両は仕様の範囲内で製作され、応答タイミングはメーカ毎に異なるので、種々の車両に検定装置が適合できるようにするためである。
【0130】
パターン3,5の車両異常については、異常の種類,発生タイミングを決定してパターンに含めることができる。
【0131】
パターン7では、充電器のタイムアウトを発生させる車両模擬装置のシーケンス応答時間は、充電器のタイムアウト時間を超過するように設定される。
【0132】
以上のような模擬動作パターンは、車両模擬シーケンス,応答タイミングにより、定められる。
【0133】
実際の検定に際しては、模擬動作パターン1は必ず実行するが、模擬動作パターン2〜7の実行については、オペレータの判断に委ねられる。
【0134】
パターン1の一例については、後述する模擬シーケンス動作の中で説明する。
【0135】
充電電流指令パターンは、時間情報,電流指令値で構成される。充電電流指令パターンの一例を、表1に示す。
【表1】
【0136】
電圧指令パターンは、時間情報,電圧指令値で構成される。電圧指令パターンの一例を、表2に示す。
【表2】
【0137】
上述した模擬動作パターン,充電電流指令パターン,電圧指令パターンは、パソコン420において、プログラム処理により作成され、ファイルに格納される。
【0138】
車両模擬装置30の制御ユニット330の処理部334は、パソコン420から送られてきた模擬動作パターン,充電電流指令パターン,電圧指令パターンに従い、充電器対応の車両の模擬と、車載電池の模擬とを行う。
【0139】
模擬動作パターンとしてパターン1(車両の充電完了で、停止へ移行するパターン)が設定された場合の模擬動作を、図8A,図8Bに示すフロー図を参照しながら、以下に説明する。図8A,図8Bに示される車両模擬装置30の応答シーケンスが、模擬動作パターン1を表している。
【0140】
オペレータが充電器10の充電開始ボタン114を押すと、スイッチd1がオンする。
【0141】
スイッチd1がオンすると、制御信号ライン112b,312bを経て、車両模擬装置30の制御ユニット330のシーケンス回路338のフォトカプラf1、およびデータ収集ユニット350のシーケンス回路358のフォトカプラf2がオンする。フォトカプラf1のオンを、制御ユニット330の処理部334が認識する。
【0142】
制御ユニット330の処理部334は、充電器10のシーケンス制御部104へ、CAN信号ライン312a,112aを経て、CAN信号の送信を開始する。
【0143】
充電器10のシーケンス制御部104は、車両模擬装置30のCAN信号送信開始を認識すると、車両模擬装置30の制御ユニット330へ、CAN信号の送信を開始する。
【0144】
制御ユニット330の処理部334は、充電器10からのCAN信号を認識すると、シーケンス回路338のスイッチk1をオンする。スイッチk1のオンは、充電許可を示す。スイッチk1がオンすると、制御信号ライン112b,312bを経て、充電器10のシーケンス回路108のフォトカプラj、およびデータ収集ユニット350のシーケンス回路358のフォトカプラk2がオンする。同時に、制御ユニット330の処理部334は、充電許可を示す状態フラグ(車両充電可能フラグ)「1」を、CAN信号により充電器10のシーケンス制御部104に通知する。
【0145】
充電器10のシーケンス制御部104は、シーケンス回路108のフォトカプラjのオンおよび車両充電可能フラグ「1」により、充電許可を認識する。
【0146】
充電器10のシーケンス制御部104は、給電コネクタ60aの受電コネクタ60bへのロックを確認すると、コネクタロックをCAN信号で車両模擬装置30の制御ユニット330の処理部334に通知する。
【0147】
続いて、充電器10のシーケンス制御部104は、充電ケーブル106の絶縁診断を実施する。絶縁診断の結果が良であれば、スイッチd2をオンする。スイッチd2のオンは、充電器10が、充電可能状態にあることを示す。
【0148】
スイッチd2がオンすると、制御信号ライン312bを経て、車両模擬装置30の制御ユニット330のシーケンス回路338のフォトカプラg1、およびデータ収集ユニット350のシーケンス回路358のフォトカプラg2がオンする。
【0149】
制御ユニット330の処理部334は、フォトカプラg1のオンを認識すると、所定時間経過後にスイッチeをオンする。これにより、充電リレーcがオンする。同時に、スイッチeのオンにより、データ収集ユニット350のシーケンス回路358のフォトカプラe2がオンする。
【0150】
充電リレーcがオンすると、充電器10のパワーユニット102は、直流電源ライン110,310を経て、回生負荷ユニット320の可逆型交直変換器322に接続される。充電器10のパワーユニット102は、交直変換器322の直流電圧出力を検出することにより、充電リレーcのオンを認識する。
【0151】
制御ユニット330の処理部334は、充電リレーcのオン後、所定時間経過すると、充電器10のシーケンス制御部104に対し、CAN信号により、充電電流指令パターンの指令を開始する。この充電電流指令パターンは、メモリ336から読出される。
【0152】
充電器10のパワーユニット102は、シーケンス制御部104により制御されて、充電電流指令パターンに追従して充電電流の出力を開始する。
【0153】
このとき充電器10のシーケンス制御部104は、現在出力電圧値および現在出力電流値を、CAN信号により車両模擬装置30の制御ユニット330に通知する。
【0154】
充電電流は、後述するように、車載電池を模擬する回生負荷ユニット320の交直変換器322に吸収される。
【0155】
車両模擬装置30の制御ユニット330の処理部334は、充電終了をCAN信号により充電器10のシーケンス制御部104に通知した後、シーケンス回路338のスイッチk1をオフする。スイッチk1のオフは、充電禁止を示す。スイッチk1がオフすると、制御信号ライン112b,312bを経て、充電器10のシーケンス回路108のフォトカプラj、およびデータ収集ユニット350のシーケンス回路358のフォトカプラk2がオフする。同時に、制御ユニット330の処理部334は、充電禁止を示す状態フラグ「0」を、CAN信号により充電器10のシーケンス制御部104に通知する。
【0156】
スイッチk1がオフすると、制御信号ライン312b,112bを経て、充電器10のシーケンス回路108のフォトカプラjがオフする。
【0157】
充電器10のシーケンス制御部104は、フォトカプラjのオフおよび状態フラグ(車両充電可能フラグ)「0」により、充電禁止を認識する。
【0158】
シーケンス制御部104は、充電電流が5A以下であることを確認すると、CAN信号により、車両模擬装置30の制御ユニット330に通知する。
【0159】
制御ユニット330の処理部334は、充電電流が5A以下であることを認識すると、リレーの溶着は生じないとして、スイッチeをオフして、充電リレーcをオフする。
【0160】
続いて、充電器10のシーケンス制御部104は、シーケンス回路108のスイッチd1,d2をオフする。
【0161】
スイッチd1,d2がオフすると、制御信号ライン112b,312bを経て、車両模擬装置30の制御ユニット330のシーケンス回路338のフォトカプラf1,g1がオフする。
【0162】
充電器10のシーケンス制御部104は、パワーユニット102の出力電圧が10V以下であることを確認する。
【0163】
10V以下であると、コネクタコンタクトの溶着は生じないとして、充電器10のシーケンス制御部104は、コネクタロックを解除し、CAN信号により、車両模擬装置30の制御ユニット330にコネクタロック解除を通知する。
【0164】
制御ユニット330の処理部334は、コネクタロック解除を認識すると、CAN信号により、CAN通信終了を充電器10のシーケンス制御部104に通知する。
【0165】
シーケンス制御部104は、車両模擬装置30からのCAN信号の通信終了を認識すると、CAN信号の通信を終了する。
【0166】
以上の模擬動作では、車両模擬装置30からパソコン420への通信については、説明しなかったが、図8A,図8Bのフロー図に示すように、車両模擬装置30および充電器10の各動作をパソコン420に通知し、ログメッセージとしてディスプレイ426に表示する。
【0167】
なお、CAN信号には、上述した信号以外に、図9に示す数値,状態フラグ,故障フラグを示すCAN信号も含まれる。検定装置20から充電器10に送信される電池総容量,電池耐力上限値,最大充電時間,電池残存容量,充電電圧上限値は、車両模擬に必要なデータであり、制御ユニット330のメモリ336に、予め設定されている。
【0168】
(回生負荷ユニットの動作)
模擬運転中の回生負荷ユニット320による車載電池の模擬動作を説明する。
【0169】
車両模擬装置30の制御ユニット330の処理部334により、回生負荷ユニット320が運転状態になる。このとき、制御ユニット330の処理部334は、計測ユニット340からの計測電圧値と、メモリ336に設定されている電圧指令値と比較する。充電開始前は、電圧指令値≧計測電圧値であるので、制御ユニット330は、回生負荷ユニット320のシーケンス制御部324を指示して、可逆型交直変換器322が、交流を直流に変換するように動作させる。
【0170】
シーケンス制御部324の制御により、可逆型交直変換器322は、交流電源50の3相交流200Vを、インバータ/整流器14で整流し、直流/直流・変換回路13で絶縁・昇圧し、チョッパ回路12で直流400Vに変換して、直流側端子17に直流400Vを出力する。
【0171】
その後、スイッチeがオンし、充電リレーcがオンされると、充電器10のパワーユニット102が、直流電源ライン110,310を経て、回生負荷ユニット320の可逆型交直変換器322の直流側端子17に接続される。
【0172】
充電器10のパワーユニット102には、直流400Vが印加され、これにより充電器10のシーケンス制御部104は、充電リレーcのオンを認識する。
【0173】
前述したように、充電リレーcのオン後に、充電電流指令パターンは、車両模擬装置30の制御ユニット330から、CAN信号により充電器10のシーケンス制御部104に送られる。充電器10は、充電電流指令パターンに従って、可逆型交直変換器322に充電電流を流す。
【0174】
一方、充電リレーcのオン後に、制御ユニット330の処理部334から電圧指令パターンが、回生負荷ユニット320のシーケンス制御部324に指示される。電圧指令パターンは、可逆型交直変換器322を定電圧制御するためのものであり、電圧指令パターンの電圧指令値は、車載電池の電池電圧である300〜400Vに設定される。
【0175】
このとき、制御ユニット330の処理部334は、計測ユニット340からの計測電圧値と、メモリ336に設定されている電圧指令値と比較する。充電開始後は、電圧指令値<計測電圧値となるので、制御ユニット330は、回生負荷ユニット320のシーケンス制御部324を指示して、可逆型交直変換器322が、直流を交流に変換するように動作させる。
【0176】
可逆型交直変換器322は、充電器10の直流出力をチョッパ回路12で昇圧し、直流/直流・変換回路13で絶縁・降圧し、インバータ/整流器14で3相200Vの交流に変換する。この直流から交流の変換によって、充電器10からの充電電流は、可逆型交直変換器322に吸収される。このとき、可逆型交直変換器322の直流側端子17の電圧は、電圧指令パターンの指令する電圧値に保持され、充電時の車載電池の電圧を模擬する。すなわち、可逆型交直変換器322は、指令された電圧指令パターンの電圧値で、電池電圧を模擬する。
【0177】
可逆型交直変換器322で変換された3相交流は、商用系統の3相交流電源50に回生される。このように、充電器10の直流出力を回生負荷ユニット320にて充電器10の交流入力に回生させるため、消費電力が少なくて済む。
【0178】
充電リレーcがオフした時点で、制御ユニット330は、シーケンス制御部324に停止指令を出して、回生負荷ユニット320の運転を停止させる。
【0179】
以上説明したように、可逆型交直変換器322は、基本的には定電圧制御である。しかし、過大な充電電流が誤って充電器10から供給されるような場合に備えて、定電流制御に切換えられるようにしてもよい。この場合には、充電電流指令パターンも、回生負荷ユニットのシーケンス制御部に指示される。この充電電流指令パターンにより、定電流制御が行われる。
【0180】
(データ収集ユニットの動作)
模擬運転開始から終了までに、CAN信号ライン312a上の信号(デジタル)、制御信号ライン312b上の信号(デジタル)、直流電源ライン310上の電圧値,電流値(アナログ)を、データ収集ユニット350に収集する。直流電源ライン310上の電圧値,電流値は、計測ライン316から計測ユニット340を経て、データ収集ユニット350に収集される。
【0181】
制御信号ライン312b上の信号の収集は、データ収集ユニット350のシーケンス回路358のフォトカプラe2,f2,g2,k2のオン/オフ状態を検出することにより、収集できる。
【0182】
フォトカプラe2のオン/オフは、充電リレーcのオン/オフを示している。フォトカプラf2のオン/オフは、充電器10のスイッチd1のオン/オフを示している。フォトカプラg2のオン/オフは、充電器10のスイッチd2のオン/オフを示している。フォトカプラk2のオン/オフは、充電許可/充電禁止を示している。
【0183】
収集されたデータのうち、デジタル信号は処理部354で10ms毎にサンプリングされて、メモリ356に格納される。一方、アナログ信号はA/Dコンバータ352で10ms毎にサンプリングされてデジタル信号に変換されて処理部354に送られ、メモリ356に格納される。
【0184】
(検定動作)
パソコン420は、模擬動作中に転送されたデータをメモリに格納する。模擬動作が終了すると、パソコン420は、車両模擬装置30のデータ収集ユニット350に、検定動作終了を通知する。データは、複数種類存在する。複数種類のデータの中から所定のデータを選択して、メモリから読出して解析する。
【0185】
データの解析は、充電方式仕様で定められている充電器10の充電シーケンスが遵守しなければならない管理時間の規定値と対応する検定ポイント時間を解析する。
【0186】
解析された検定ポイント時間を、充電方式仕様の管理時間(以下、検定管理時間という)と照合することによって、仕様に適合するか否かを検定し、良否を示す検定結果をメモリに格納する。
【0187】
例えば、CHAdeMOの仕様によれば、表3に示すような検定ポイント時間,検定管理時間が決められている。
【表3】
【0188】
例えば、直流電流5A以下検出からスイッチd1オフまでの時間が、4000ms〜4200msでなければならない場合の良否判定は、
検定ポイント時間が3990msの場合は否、
検定ポイント時間が4000msの場合は良、
検定ポイント時間が4200msの場合は良、
検定ポイント時間が4210msの場合は否、
検定ポイント時間が−10msの場合は否である。
【0189】
本実施例によれば、さらに、充電電流許容誤差(充電電流指令値に対する計測電流値の誤差),計測誤差(計測電流値と現在出力電流値との誤差,計測電圧値と現在出力電圧値との誤差)の検定を行うこともできる。
【0190】
例えば、CHAdeMOの仕様によれば、充電電流許容誤差,計測誤差の基準値は、表4に示すように定められている。基準値内である場合には、判定は良である。
【表4】
【0191】
表4において、現在出力電流値,現在出力電圧値は、充電器10が充電出力を開始した後に、CAN信号によって充電器10から車両模擬装置30に送られる数値データである。
【0192】
良否判定は、例えば、
充電電流指令値が20Aの場合に、計測電流値が19.81Aであれば良、
充電電流指令値が50Aの場合に、計測電流値が50.19Aであれば良、
充電電流指令値が60Aの場合に、計測電流値が60.00Aであれば良、
充電電流指令値が125Aの場合に、計測電流値が125.38Aであれば良、
計測電流値が125Aの場合に、現在出力電流値が124.90Aであれば良である。
【0193】
(表示処理動作)
パソコン420のディスプレイ426への表示処理について、模擬シーケンス動作中および模擬シーケンス動作後について、それぞれ説明する。
【0194】
模擬シーケンス動作中のディスプレイへの表示
・タイミングチャート
メモリに格納された複数種類のデータから所定のデータを選択して100mSの周期で読出し、時間軸を共通にしたタイミングチャートを作成し、ディスプレイ426に表示させる。オペレータは、このようなタイミングチャートにより、模擬動作中のシーケンスを視覚的に同時に確認できる。
【0195】
・ログメッセージ
車両模擬装置30からパソコン420に通信されるログメッセージは、ディスプレイ426に表示される。オペレータは、表示されたログメッセージを見て、模擬シーケンスの動作を逐一確認することができる。
【0196】
模擬シーケンス動作後のディスプレイへの表示
・検定結果レポート
充電器10の充電シーケンスの応答タイミングの検定結果、および充電電流許容誤差,計測誤差の検定結果を、表形式でディスプレイに表示する。これにより、オペレータは、検定結果を確認できる。
【0197】
・実施した模擬動作パターン
パソコン420で設定された模擬動作パターンを、ディスプレイ426に表示する。オペレータは、実施されている模擬動作パターンをディスプレイ上で確認できる。
【0198】
・タイミングチャート
オペレータは、検定結果を見て、状況を確認したい場合がある。例えば、検定結果は「良」であったが、微妙なタイミングの信号状況を見て、パラメータを変更したらどうなるかを、検証してみる。あるいは、電圧,電流の挙動は、どのようであったかを検証する。また、検定結果が「否」の場合に、その状況を検証する等である。
【0199】
以上のような場合、メモリに格納されている複数種類のデータの中から所定のデータを選択して読出し、時間軸を共通にしたタイミングチャートを作成し、ディスプレイ426に表示させる。
【0200】
一例として、フォトカプラf2のオン/オフ状態(スイッチd1のオン/オフ状態に対応)、フォトカプラg2のオン/オフ状態(スイッチd2のオン/オフ状態に対応)、フォトカプラkのオン/オフ状態(フォトカプラjのオン/オフ状態に対応)、充電リレーcのオン/オフ状態(スイッチe2のオン/オフ状態に対応)、コネクタロック状態(ロックから解除まで)、車両模擬装置側のCAN通信状態(CAN通信開始から終了まで)、充電器側のCAN通信状態(CAN通信開始から終了まで)、直流電源ラインの直流電圧,直流電圧を、時間軸を共通にして表示したタイミングチャートを、図10に示す。
【0201】
・タイミングチャート上のカーソル位置の表示項目の値
例えば、図10の直流電圧にカーソルを移動し、カーソルの位置の電圧値を表示させる。これにより、どの時刻に何ボルトの電圧が計測されたのかを確認できる。
【0202】
・検定ポイント時間拡大チャート
例えば、図10において、車両CAN通信開始から充電器CAN通信開始までの検定ポイント時間を拡大表示させる。
【0203】
・相対時間確認タイミングチャート
例えば、図10において、2本のカーソルを移動し、カーソル間の相対時間を確認する。
【0204】
(データ出力・保存処理)
ディスプレイ426に表示された表あるいはチャートは、プリンタ428で出力することもできる。また、全データを、ファイルに保存し、必要なときに取出すことができる。
【0205】
以上の実施例は、模擬動作シーケンスが車両充電完了で正常終了する場合(パターン1)であったが、充電中に充電器異常で異常終了する場合(パターン6)の一例として、電池過電圧(充電中に車載電池の上限電圧に到達)が発生した場合の模擬動作シーケンスを、図11A,図11Bに示す。
【0206】
この模擬動作シーケンスによれば、図8Bの模擬シーケンスの「充電終了」のステップ前に「電池過電圧発生」のステップが挿入されるのみであり、その他のステップは、同じである。
【0207】
車両模擬装置30は、電池過電圧発生を、CAN信号により、充電器10のシーケンス制御部104に通知する。車両模擬装置30の制御ユニット330の処理部334は、CAN信号により、充電終了を充電器10のシーケンス制御部104に通知する。以降のシーケンスは、図8Bと同じである。
【符号の説明】
【0208】
10 充電器
12 チョッパ回路
13 直流/直流・変換回路
14 インバータ/整流器
20 充電器検定装置
30 車両模擬装置
40 制御処理装置
50 交流電源
60a 給電コネクタ
60b 受電コネクタ
102 パワーユニット
104 シーケンス制御部
106 給電ケーブル
110,310 直流電源ライン
112,312 信号ライン
114 充電開始ボタン
116 充電停止ボタン
316 計測ライン
320 回生負荷ユニット
322 可逆型交直変換器
324 シーケンス制御部
330 制御ユニット
340 計測ユニット
350 データ収集ユニット
402 制御部
404 メモリ
406 パラメータファイル
408 パラメータ設定部
410 検定部
412 表示処理部
414 入力部
416 出力部
420 パソコン
422 パソコン本体
424 キーボード
426 ディスプレイ
428 プリンタ
【特許請求の範囲】
【請求項1】
交流電源の交流を直流に変換し、移動体の搭載電池を充電する充電器に接続され、前記充電器に対する車両のシーケンスを模擬する移動体模擬装置であって、
前記充電器の出力する充電電流が流れる直流電源ラインと、
前記充電器との間で通信される種々の信号が流れる信号ラインと、
前記直流電源ラインに挿入されて移動体の充電リレーを模擬し、前記信号ライン上の前記種々の信号の一つである、前記充電器からの信号によりオン・オフされるリレーと、
前記搭載電池を模擬する可逆型の直流/交流・変換器を有し、前記直流/交流・変換器の直流側端子が前記リレーに接続された回生負荷ユニットと、
前記信号ラインに接続され、前記充電器と通信するとともに、前記回生負荷ユニットを制御して、前記充電器に対する移動体の模擬シーケンスを実行する制御ユニットと、
前記直流電源ライン上の計測された電圧値および電流値と、前記信号ライン上の前記種々の信号とを、データとして収集するデータ収集ユニットとを備え、
前記直流/交流・変換器の交流側端子は、前記交流電源に接続され、
前記直流/交流・変換器は、
前記リレーがオンされる前に、前記交流電源の交流を直流に変換して前記直流側端子に直流電圧を出力し、充電前の搭載電池の電圧を模擬し、
前記リレーがオンされた後に、前記充電器からの直流を交流に変換し、前記直流側端子の直流電圧が充電時の搭載電池の電圧を模擬し、変換された交流を前記交流側端子から前記交流電源に回生する、移動体模擬装置。
【請求項2】
前記制御ユニットは、予め設定されたパラメータに従って、前記充電器に対する移動体の模擬シーケンスを実行する、請求項1に記載の移動体模擬装置。
【請求項3】
前記パラメータは、
前記充電器に対する移動体の模擬シーケンスを指示する模擬動作パターンと、
前記信号ラインを経て前記充電器に与えられ、前記充電器の出力する充電電流を指示する充電電流指令パターンと、
前記回生負荷ユニットに与えられ、前記回生負荷ユニットの直流/交流・変換器の直流側端子の電圧を指示し、前記搭載電池の充電時の電圧を模擬する電圧指令パターンと、
を少なくとも含む請求項2に記載の移動体模擬装置。
【請求項4】
請求項3に記載の移動体模擬装置と、
前記移動体模擬装置の前記制御ユニットおよび前記データ収集ユニットに接続された、制御処理装置とを備え、
前記制御処理装置は、
前記移動体模擬装置の制御ユニットに、前記パラメータを設定し、
設定された前記パラメータに従って実行された、前記充電器に対する移動体の模擬シーケンスが終了したときに、前記データ収集ユニットが収集した前記データに基づいて、前記充電器の充電シーケンスの応答タイミングが、所定の基準に適合しているか否かを検定し、検定結果を表形式で表示出力する、
充電器検定装置。
【請求項5】
前記制御処理装置は、前記計測された電圧値および電流値の誤差が、所定の基準に適合しているか否かを検定し、検定結果を表形式で表示出力する、請求項4に記載の充電器検定装置。
【請求項6】
前記制御処理装置は、前記充電器に対する移動体の模擬シーケンスの実行中および終了時のいずれか一方または双方に、前記データ収集ユニットが収集している前記データの中から選択されたデータを、所定の形式で表示出力する請求項5に記載の充電器検定装置。
【請求項1】
交流電源の交流を直流に変換し、移動体の搭載電池を充電する充電器に接続され、前記充電器に対する車両のシーケンスを模擬する移動体模擬装置であって、
前記充電器の出力する充電電流が流れる直流電源ラインと、
前記充電器との間で通信される種々の信号が流れる信号ラインと、
前記直流電源ラインに挿入されて移動体の充電リレーを模擬し、前記信号ライン上の前記種々の信号の一つである、前記充電器からの信号によりオン・オフされるリレーと、
前記搭載電池を模擬する可逆型の直流/交流・変換器を有し、前記直流/交流・変換器の直流側端子が前記リレーに接続された回生負荷ユニットと、
前記信号ラインに接続され、前記充電器と通信するとともに、前記回生負荷ユニットを制御して、前記充電器に対する移動体の模擬シーケンスを実行する制御ユニットと、
前記直流電源ライン上の計測された電圧値および電流値と、前記信号ライン上の前記種々の信号とを、データとして収集するデータ収集ユニットとを備え、
前記直流/交流・変換器の交流側端子は、前記交流電源に接続され、
前記直流/交流・変換器は、
前記リレーがオンされる前に、前記交流電源の交流を直流に変換して前記直流側端子に直流電圧を出力し、充電前の搭載電池の電圧を模擬し、
前記リレーがオンされた後に、前記充電器からの直流を交流に変換し、前記直流側端子の直流電圧が充電時の搭載電池の電圧を模擬し、変換された交流を前記交流側端子から前記交流電源に回生する、移動体模擬装置。
【請求項2】
前記制御ユニットは、予め設定されたパラメータに従って、前記充電器に対する移動体の模擬シーケンスを実行する、請求項1に記載の移動体模擬装置。
【請求項3】
前記パラメータは、
前記充電器に対する移動体の模擬シーケンスを指示する模擬動作パターンと、
前記信号ラインを経て前記充電器に与えられ、前記充電器の出力する充電電流を指示する充電電流指令パターンと、
前記回生負荷ユニットに与えられ、前記回生負荷ユニットの直流/交流・変換器の直流側端子の電圧を指示し、前記搭載電池の充電時の電圧を模擬する電圧指令パターンと、
を少なくとも含む請求項2に記載の移動体模擬装置。
【請求項4】
請求項3に記載の移動体模擬装置と、
前記移動体模擬装置の前記制御ユニットおよび前記データ収集ユニットに接続された、制御処理装置とを備え、
前記制御処理装置は、
前記移動体模擬装置の制御ユニットに、前記パラメータを設定し、
設定された前記パラメータに従って実行された、前記充電器に対する移動体の模擬シーケンスが終了したときに、前記データ収集ユニットが収集した前記データに基づいて、前記充電器の充電シーケンスの応答タイミングが、所定の基準に適合しているか否かを検定し、検定結果を表形式で表示出力する、
充電器検定装置。
【請求項5】
前記制御処理装置は、前記計測された電圧値および電流値の誤差が、所定の基準に適合しているか否かを検定し、検定結果を表形式で表示出力する、請求項4に記載の充電器検定装置。
【請求項6】
前記制御処理装置は、前記充電器に対する移動体の模擬シーケンスの実行中および終了時のいずれか一方または双方に、前記データ収集ユニットが収集している前記データの中から選択されたデータを、所定の形式で表示出力する請求項5に記載の充電器検定装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9】

【図10】
【図11A】
【図11B】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9】
【図10】
【図11A】
【図11B】
【公開番号】特開2013−110775(P2013−110775A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−251398(P2011−251398)
【出願日】平成23年11月17日(2011.11.17)
【出願人】(000002842)株式会社高岳製作所 (72)
【出願人】(000003687)東京電力株式会社 (2,580)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月17日(2011.11.17)
【出願人】(000002842)株式会社高岳製作所 (72)
【出願人】(000003687)東京電力株式会社 (2,580)
【Fターム(参考)】
[ Back to top ]