
先行画像で制約する連続画像再構成の方法
下取り採取した画像データから高品質画像を再構成する方法を提供する。画像再構成方法は、幾つかの異なる画像様式に適用可能である。特に、本発明は、適切な先行画像を逐次画像再構成処理に組込み、前のタイムフレームからの画像フレームを利用し、現在の画像フレームの再構成を抑制する画像再構成方法を提供する。

【発明の詳細な説明】
【技術分野】
【0001】
本願は、表題"Method for Image Reconstruction Using Prior Image Constrained Compressed Sensing"で出願(2008年1月14日付)している米国仮出願(番号61/020,847)、及び、表題"Method for Image Reconstruction Using Prior Image Constrained Compressed Sensing"で(2008年6月9日付)出願している米国仮出願(番号61/059,891)において優先権を主張している。
【0002】
この発明は、米国政府機関の国立衛生研究所の支援(NIH EB005712及びNIH EB007021)でなされた。米国政府は、本発明に特定の権利を有する。
【背景技術】
【0003】
発明の領域は、医用画像に関し、特に画像を再構成する方法に関する。
【0004】
コンピュータ断層撮影装置において、X線源は、直交座標系のX−Y面(画像面)内で平行になる円錐形状ビームを放射する。X線ビームは、撮像する被写体(例、内科患者)を通過し、配列した放射線検出器に突き当たる。透過放射線強度は、被写体のX線ビームの減衰に依存し、各検出器は、ビーム減衰の測定となる個別の電気信号を生ずる。全ての検出器からの減衰測定は、個別に取得され、透過像、減衰像、又は、投影と呼ばれるものを形成する。
【0005】
従来のCT装置の光源及び検出器配列は、架台上で画像面内及び被写体周囲で回転させ、 X線ビームの被写体に交差する角度を常に変化させる。任意の角度での検出器配列からの透過像は、1つの視野となり、被写体の走査は、X線源及び検出器の一回転での異なる角度方向で形成される一組の視野を含む。2D走査の場合、データは、被写体から得られる2次元薄片に対応する画像の構成に処理される。2Dデータから画像を再構成する一般的な方法は、フィルタ補正逆投影法と称されている。この画像再構成処理は、走査中に取得される減衰測定を、表示部の対応するピクセルの輝度制御に使用されるCT数又はCT値(Hounsfield units)と呼ばれる整数値に変換される。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、画像再構成の方法を提供するものである。
【課題を解決するための手段】
【0007】
本発明の画像再構成法は、正確な再構成の利点を信号対ノイズ比(SNR)のゲインと組合せている。つまり、被検者の適切な先行画像を画像再構成処理に組み込んでいる。SNRの増加に加えて、本発明の方法は、分解能を一次的に増す。更に、得られる所望画像及び投影の数に対し、本発明の方法は、従来の画像再構成法(例、圧縮センシング:CS)が失敗している正確な画像再構成を与える。
【0008】
本発明は、時間分解画像データから良質の画像フレームを実時間で再構成する方法を提供する。この方法は、実時間画像方法を利用する画像誘導治療処置に適用できる。例えば、X線蛍光誘導治療処置は、本発明の方法で利点を得る。この場合、良質の画像フレームが、患者への全X線量の減少で再構成ができる。
【0009】
本発明の方法は、時系列の画像フレームでの特定画像フレームの再構成を与える。本方法は、時系列の最も近い画像フレームから現在の画像フレームを差し引く。例えば、前画像フレームが、現在の画像フレームから差し引かれる。このように、各新規に再構成された画像フレームが、動的な先行画像として使用され、現在の画像フレームを疎にする。現在の画像フレームは、更に少ない投影データから正確な再構成を可能にする。
【0010】
本発明の利点を下記明細書で説明する。記載において、添付図を用いて発明の実施形態を説明している。実施形態は、発明の範囲を限定するものでなく、発明の解釈の参照とするものである。
【図面の簡単な説明】
【0011】
【図1】本発明で利用している画像再構成法の実施形態の工程図である。
【図2】本発明で利用している画像再構成法の他の実施形態の工程図である。
【図3】本発明で利用している画像再構成法の別の実施形態の工程図である。
【図4】(A)本発明を使用するCアームX線装置の図。(B)図4AのCアームX線装置の構成図である。
【図5】(A)図4AのCアームX線装置のX線源及び検出器の図。(B)図4AのCアームX線装置で用いられるCアーム走査経路の図である。
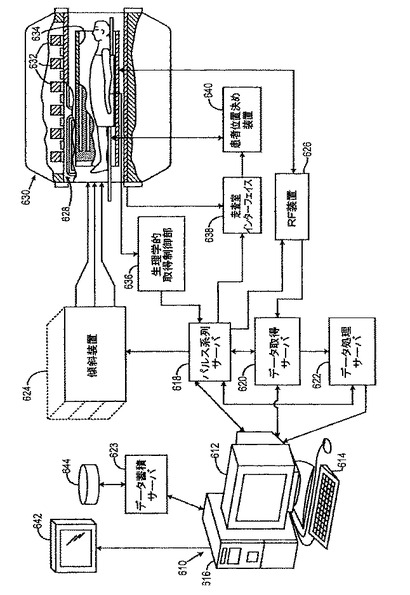
【図6】図6は、本発明を使用する磁気共鳴画像(MRI)装置の構成図である。
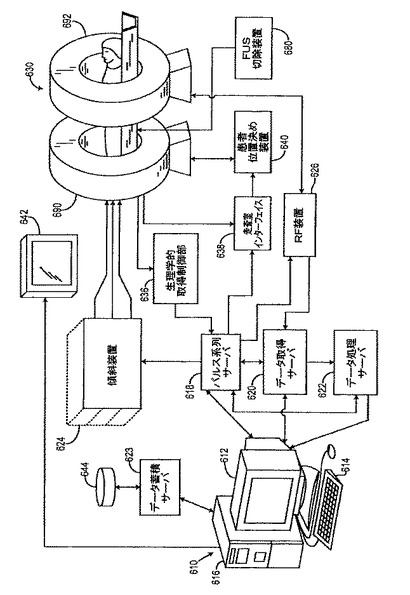
【図7】図7は、本発明を使用する他の磁気共鳴画像(MRI)装置の構成図である。
【図8】図8は、本発明の実施形態の工程を説明する工程図である。
【発明を実施するための形態】
【0012】
一般的に、一組のデータから画像を再構成する方法は、測定データサンプルYから所望の画像Iを推測する一連の計算ステップを含む。更に具体的には、画像再構成は、次の適合性条件を満たす。
【0013】
式(1) AI=Y
【0014】
Aはシステム行列で、一般的には、所望画像Iを取得データサンプルYに関連付ける前方投影演算子として見なせる。コンピュータ断層撮影(CT)画像の処理の場合、システム行列は再投影操作を含む。式(1)の適合性条件は、別の言葉で言えば、画像が忠実に再構成される時、前方演算は、測定した投影データの正確な推定値を生成するために、実データ取得手続に略似ているべきである。
【0015】
本発明の実施で使用する画像再構成法は、良質の画像を提供する。「先行画像」は、圧縮センシング(CS)原理が利用されている反復画像再構成法を抑制するために使用されている。例えば、CSで一般に使用されているスパース変換に加えて、画像を所望画像から先行画像を取り去って更に疎にする。その結果、CS法で要求されるよりも少ないサンプル数の使用で、画像が正確に再構成される。
【0016】
更に具体的には、先行画像Ip及び再構成する所望画像Iにおいて、画像再構成の本発明の方法は、次の目的関数の最小化で達成される。
【0017】
式(2) α||Ψ1(I−Ip)||1+(1−α)||Ψ2I||1
Ψ1、Ψ2:スパース変換
||...||1:L1ノルム演算
α:目的関数式(2)の2つの項の相対的重みの制御に利用される正則化変数
【0018】
上記から、次式
式(3) ||x||1=Σi=1N|xi|
は、N次元ベクトルxのL1ノルムを意味する。一般的には、真のL1ノルムからの偏差は、所望画像に適切な画質を維持する限り可能である。例えば、目的関数式(2)は、次式に一般化できる。
【0019】
式(4) α||Ψ1(I−Ip)||p+(1−α)||Ψ2I||p
||...||p:次の形式を有するLpノルム演算
式(5) ||x||p=(Σi=1N|xj|p)1/p
【0020】
上記のように、好ましくはp=1.0であるが、しかし、異なるp値が可能である。
【0021】
当業者には周知であるが、p値が1.0から更に外れると、再構成した所望画像の劣化が一層明白になる。
【0022】
式(2)でのスパース変換Ψ1、Ψ2は一般的には異なるが、同一であっても良い。例次的なスパース変換は、ウェーブレット変換、1次差分、2次差分、及び、次式の離散階調変換を含んでいる。
式(6) ▽m,nI(m,n)=√([I(m+1,n)−I(m,n)]2+[I(m,n+1)−I(m,n)]2)
指数m、n:画像Iのピクセルの位置
▽m,nI(m,n)で特定される画像は、通常、「階調画像」と称されている。
【0023】
目的関数式(2)の両方の項が重要である。重要性の結果として、正則化変数の選択αが、全体の画像再構成処理の制御に利用される。正則化変数αの選択は、先行画像Ipの選択及び手元の医療用途の選択にも依存する。例えば、目的関数式(2)の第2項は、先行画像Ipから潜在的に受け継ぐ縞のノイズを軽減する。実例として、α≒0.3−0.7の正則化変数の選択は、呼吸器官の画像適用には一般的に十分である。
【0024】
適合性条件式(1)を全体の画像再構成に一層良く取り込むために、ラグランジュ乗数法が利用される。この場合、適合性条件は、式(2)で設定した目的関数の最小化に更に制約を加えて使用される。新しい目的関数は、次式の形式となる。
式(7) α||Ψ1(I−Ip)||1+(1−α)||Ψ2I||1+λ||X||22
λ:ラグランジュ乗数
X:差分行列
||...||22:平方L2ノルム演算
N次元ベクトルxに対し、L2ノルムは次式となる。
式(8) ||x||22=Σi=1Nxi2
【0025】
式(7)の差分行列は、適合性条件式(1)から成り、次式となる。
式(9) X=AI−Y
【0026】
ラグランジュ乗数λは、本発明の実施で使用される特定の画像装置に対し経験的に決定される。例えば、ラグランジュ乗数λは、所望のデータ適合性条件と先行画像Ipの類似性との間で所定の交換条件で決定される。大きいラグランジュ乗数λが選択されると、再構成された画像は、低ノイズ分散を有する。しかし、先行画像に特徴な高い空間分解能の損失となる。小さいラグランジュ乗数λが使用されると、先行画像の特徴である高い空間分解能が維持されるが、ノイズ分散が所望の画像で高くなる。このような状況は、利用される画像装置で達成されるコントラスト対ノイズ比に影響を及ぼす。
【0027】
式(7)に示す目的関数は、画像装置のノイズを説明するために変更できる。この場合、次の目的関数が最小化される。
【0028】
式(10) α||Ψ1(I−Ip)||+(1−α)||Ψ2I||1+λ(XTDX)
XT:差分行列Xの転置
D:次の行列要素を有する対角行列のシステムノイズ行列
【0029】
式(11) Dij=1/σn2 (i=j),0 (i≠j)
σ2:ノイズ分散及び本発明の実施で使用される画像装置でのノイズを表す変数
例えば、X線画像装置の場合、ノイズ変数σn2は、nthのX線検出器に関連するノイズ分散である。
【0030】
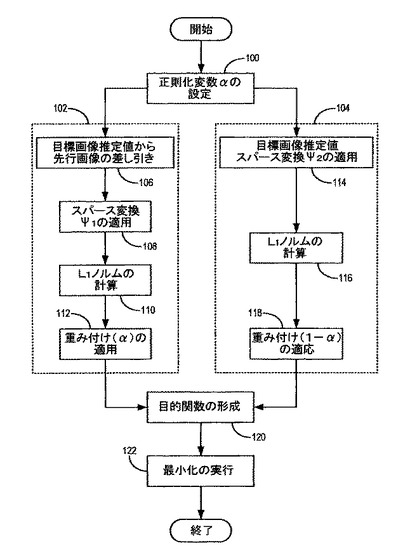
図1を参照して欲しい。本発明での方法の1つの実施で式(2)の目的関数を用いている。この場合、正則化変数αの初期化で開始している(ステップ100)。正則化変数αの選択は、所望画像の散在と所望画像での先行画像の影響との間の取引を決定する。従って、正則化変数αの値は、目前の臨床用途に依存する。例えば、α≒0.3−0.7は、呼吸器系の画像用途には十分である。続いて、目的関数の式(2)の第1及び第2項が、各々初期化される(ステップ102、104)。第1項α||Ψ1(I−Ip)||の初期化は、ステップ106で始まり、先行画像Ipは、所望画像Iの推定値から差し引いて、「差分画像」を生成する。先行画像Ipの特定の選択及び所望画像Iの推定値は、画像化の手順及び特定の臨床用途に依存する。従って、これらの選択に対する異なる変更は、下記に詳細に説明する。差分画像は、次に、スパース変換Ψ1の適用で疎にさせる(ステップ108)。上記記載したように、スパース変換Ψ1は、ウェーブレット変換、1次差分、2次差分、及び、離散階調変換を含む何れの数学的演算となる。このスパース差分画像のL1ノルムは、ステップ110で計算される。この処理の結果は、ステップ112で表示される正則化変数αで重みを加える。
【0031】
目的関数の式(2)の第2項(1−α)||Ψ2I||1の初期化は、ステップ114で開始し、所望画像Iの推測値は、スパース変換Ψ2の適用で疎にされる。続いて、このスパース所望画像推定値のL1ノルムがステップ116で計算される。離散階調変換∇m,nがスパース変換Ψ2として選択されると、ステップ114、116で、所望画像推定値の全変数TVの計算として見なされる。TVは次式である。
式(12) TV(I)=||▽I||1=Σ|▽I|
【0032】
スパースした所望画像推定値のL1ノルムの計算後、結果を(1−α)で重みを付ける(ステップ118)。目的関数式(2)が、第1及び第2項を共に加えて形成される(ステップ120)。この目的関数は、例えば、非線形共役勾配法の使用で最小化される(ステップ122)。最小化処理は、停止基準が満たされるまで進められる。停止基準は、例えば、所望画像の現在推定値を前の繰返しからの所望画像の推定値との比較から成る。停止基準は、次式となる。
(式13) ΣiΣj(Iij(k+1)−Iij(k))2
Iij(k+1):ピクセル位置(i,j)での所望画像の(k+1)th推定値の値
Iij(k):ピクセル位置(i,j)での所望画像のkth推定値の値
【0033】
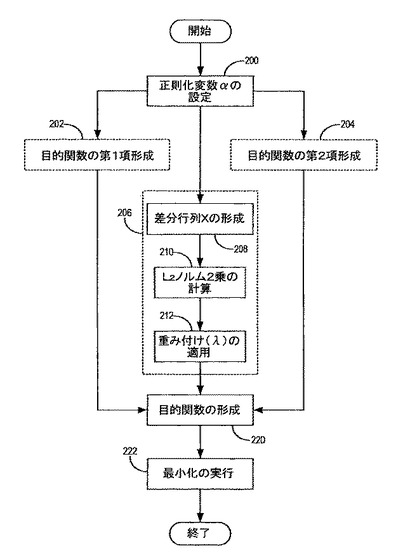
図2に示すように、本発明の方法の他の実施では目的関数式(7)を用い、正則化変数αの初期化で開始する(ステップ200)。続いて、目的関数式(7)の第1及び第2項を各々初期化する(ステップ202、204)。この処理は、図1のステップ102、104と同様の方法で進行する。しかし、適合性条件式(1)は、ステップ206で初期化される第3項(λ||X||22)に組み込まれている。最初に差分行列Xが生成される(ステップ208)。上記で詳細に記述したように、差分行列Xは、適合性条件式(1)に対応し、式(9)となる。
【0034】
従って、差分行列Xは、システム行列Aを所望画像Iの推定値に適用し、次に、所望画像に対応する取得された画像データYを差し引いて確定される。差分行列XのL2ノルムの二乗が計算される(ステップ210)。差分行列XのL2ノルムの二乗が生成されると、ラグランジュ乗数λを決定し、差分行列Xに重みを付けるのに使用される(ステップ212)。上記のように、目前の臨床用途に応じて、ラグランジュ乗数の経験的な決定及び値が選択される。目的関数式(7)が、第1、第2及び第3項を共に加えて生成される(ステップ220)。目的関数は、非線形共役勾配法で最小化され(ステップ222)、最小化処理は、停止基準が満たされるまで進行する。
【0035】
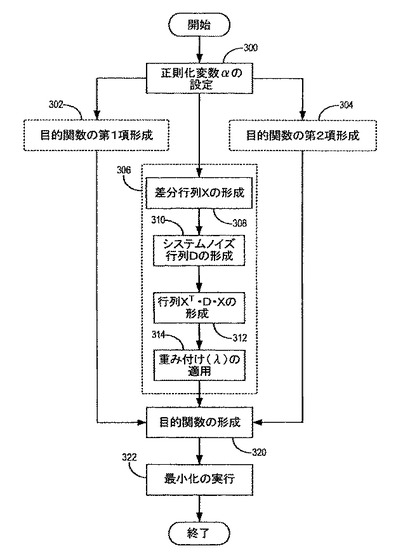
図3は、目的関数式(10)を使用し、正則化変数αの初期化で開始する(ステップ300)他の実施形態である。続いて、目的関数式(10)の第1及び第2項が各々初期化される(ステップ302、304)。この処理は、図1に示すステップ102、104と同様の方法で進行する。しかし、適合性条件式(1)及び画像装置でのノイズの影響は、第3項λ(XTDX)に取り込んでいる(ステップ306)。最初に、差分行列Xが生成され(ステップ308)、図2のステップ208に記載するように、システムノイズ行列Dが生成される(ステップ310)。システムノイズ行列Dは、次式で決定される行列要素を有する対角行列である。
式(14) Dij=1/σn2 (i=j),0 (i≠j)
【0036】
上記したように、σn2は、ノイズ分散で、本発明の実施で使用した画像装置のノイズを表す変数である。例えば、X線画像装置の場合、ノイズ変数σn2は、nthのX線検出器に関連するノイズ分散である。システムノイズ行列Dが生成されると、次の行列乗算が実行される(ステップ312)。
(式15) XTDX
【0037】
この演算の結果は、続いて、ラグランジュ乗数で重みが付けられる(ステップ314)。目的関数式(10)は、続いて、第1、第2及び第3項を共に加えて形成される(ステップ320)。目的関数は、例えば非線形共役勾配法の使用で最小化される(ステップ322)。この最小化処理は、停止基準が満たされるまで進行する。
【0038】
CアームX線画像装置
【0039】
本発明の実施形態の画像再構成に使用したX線装置(特に、図4A及び図4B)は、治療処置に関連した使用に設計されている。一端部でX線源装置412と他端部でX線検出器配列装置414とを担持するCアーム410を有する架台が特徴である。架台は、台416上の患者の回りで、X線源412及び検出器414を異なる位置及び角度に向けることが可能で、医師の患者への接近を可能にしている。
【0040】
架台は、台416下に延びている水平脚420と、台416から離れ、水平脚420の端部で上部に延在する垂直脚422と、を有しているL形状の台座418を有している。 支持腕424は、垂直脚422の上端に回転可能に取付けられ、水平の旋回軸426に対し回転できる。旋回軸426は、台416の中心線に並んでおり、腕424は、旋回軸426から径方向上部に延在し、その外端部でCアーム駆動装置427を支持している。Cアーム410は、駆動装置427に摺動可能に固定され、駆動モータ(図示せず)に結合されている。駆動モータは、Cアーム410を摺動させ、C軸428に対し回転させる(矢印430)。旋回軸426及びC軸428は、台416上に位置する等角点で互いに垂直に交差している。
【0041】
X線源装置412は、Cアーム410の一端部に取付けられ、検出器配列装置414は、他端部に取付けられている。下記に詳細に記載するが、X線源412は、検出器414に向かう円錐状ビームのX線を放射する。両装置412、414は、旋回軸426に径方向内側に延在し、円錐状ビームの中心光が装置の等角点436を通過する。円錐状ビームの中心光を、装置の等角点に対し、台416上に載せた被検者からのX線減衰データ取得中、旋回軸426又はC軸428の周り、又は、双方で回転できる。
【0042】
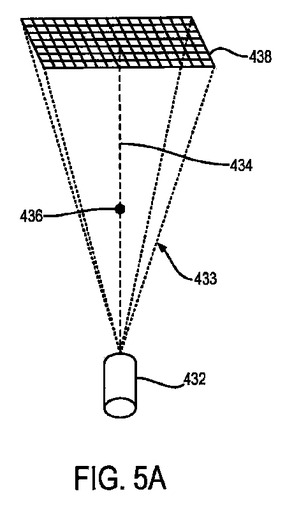
図5Aに示すように、X線源装置412は、電圧を加えると円錐状433のX線ビームを放射するX線源432を備えている。中心光434は、装置の等角点436を通過し、検出装置414に格納されている2次元平坦パネルのデジタル検出器438に当たる。検出器438は、2048×2048要素の2次元配列の検出器素子で、41cm×41cmの寸法を有している。各素子は、患者を通過して突き当たったX線強度及びX線の減衰を表す電気信号を生成する。走査中、X線源432及び検出器配列438は、装置の等角点436で回転し、異なる角度からの減衰投影データを取得する。検出器配列は、毎秒30の投影又は視野の取得が可能で、これが幾つの視野が所定の走査通過と速度で取得される制限要因となる。
【0043】
装置412、414の回転及びX線源432の操作は、CT装置の制御機構部440で制御されている(図4B参照)。制御機構部440は、X線源432に電力及びタイミング信号を与えるX線制御部442を含んでいる。制御機構部440のデータ取得装置(DAS)444は、検出器素子438からのデータを採取し、そのデータを画像再構成部445に送る。画像構成部445は、DSA444からデジタル化したX線データを受け取り、本発明の方法で高速の画像再構成を実行する。再構成された画像は、大容量記憶デバイス449に画像を蓄積又は画像を更に処理するコンピュータ446に入力として適用される。
【0044】
制御機構部440は、旋回軸モータ制御部447及びC軸モータ制御部448も含んでいる。コンピュータ446からの動作コマンドに応じて、モータ制御部447、448は、旋回軸426及びC軸428で各々の回転を生成するX線装置のモータに電力を供給する。コンピュータ446で実行されるプログラムは、モータ駆動部447に動作コマンドを生成し、所定の走査経路で装置412、414を動かす。
【0045】
コンピュータ446は、キーボード及び他の手動操作制御部を有するコンソール450を介した操作者からのコマンド及び走査変数を受け取る。関与する陰極線管表示部は、操作者の再構成された画像及びコンピュータ446からのほかのデータの観察が可能である。操作者が与えたコマンドは、蓄積されたプログラムの指示に従うコンピュータ446で使用され、DAS444、X線制御部442及びモータ制御部448に制御信号及び情報を与える。加えて、コンピュータ446は、装置の等角点436に患者を位置付ける電動台416を制御する台のモータ制御部454を操作する。
【0046】
上記記載のX線装置は、蛍光透視法で操作し実時間で2次元画像を生成できる。主として、このモードの使用は、患者にカテーテル法を実施し、蛍光透視法を処置の誘導に使用する場合である。誘導されている器具及びその周囲組織が十分に見えるSNRの画像フレームが生成されるのが好ましい。更に、実時間に近い処置画像を与えるフレーム速度及び可能な限り低いX線量となる画像フレームの形成が望ましい。
【0047】
磁気共鳴画像装置
【0048】
図6は、本発明の実施形態のMRI装置を示す。MRI装置は、表示部612及びキーボード612を有するワークステーション610を含む。ワークステーション610は、市販で入手可能なOSで動作する市販で入手可能な機械の演算部616を含む。ワークステーション610は、MRI装置に走査指示の登録を可能とする操作インターフェイスを与える。ワークステーション610は、パルス系列サーバ618、データ取得サーバ620、データ処理サーバ622、及び、データ蓄積サーバ623の4つのサーバに接続されている。ワークステーション610及び各サーバ618、620、622、623は、互いに通信可能に接続されている。
【0049】
パルス系列サーバ618は、ワークステーション610からダウンロードした命令に応じて作用し、傾斜装置624及びRF装置626を操作する。所定の走査の実行に必要な傾斜波形が形成され、傾斜装置624に適用される。傾斜装置624は、装置628内の傾斜コイルを励起し、磁場傾斜Gx、Gy、Gzを生成し、MR信号の位置エンコードに使用される。傾斜コイル装置628は、分極磁石632及びRFコイル634全体を含む磁石装置630の部分を形成する。
【0050】
RF励起波形は、RF装置626によりRFコイル634に加えられ、所定の磁気共鳴パルス系列を実施する。RFコイル634又は別個の局在コイル(図6に図示せず)で検出される応答MR信号は、パルス系列サーバ618で形成されるコマンドの指令で、RF装置626での受け取り、増幅、復調、フィルター及びデジタル化される。RF装置626は、MRパルス系列に使用される幅広いRFパルスを形成するRF送信器を含む。RF送信器は、パルス系列サーバ618からの走査指示及び走査指令に応じ、所望の周波数、位相及びパルス振幅波形を形成する。生成されたRFパルスは、RFコイル全体、又は、1つ又はそれ以上の局在コイル又はコイル配列(図6に図示せず)に加えられる。
【0051】
RF装置626は、1つ又はそれ以上のRF受信路も含んでいる。各RF受信路は、接続されたコイルで受信されるMR信号を増幅するRF増幅器と、受信MR信号のI及びQ直交成分を検出及びデジタル化する検出器とを含んでいる。受信されたMR信号の大きさは、採取点でのI及びQ成分の二乗の和の平方根、
M=√(I2+Q2)
及び、受信MR信号の位相で決定される。
φ=tan−1(Q/I)
【0052】
パルス系列サーバ618は、生理学的取得制御部636から患者データを適宜受け取る。制御部636は、患者に接続された幾つかの異なるセンサ(例、電極からのECG信号又はベローズからの呼吸信号)からの信号を受け取る。これらの信号は、パルス系列サーバ618で使用され、被検者の呼吸又は心臓の鼓動で走査の実行を同期又はゲートさせる。
【0053】
パルス系列サーバ618は、走査室インターフェイス回路638にも接続している。インターフェイス回路638は、患者の状態及び磁気装置に関連する種々のセンサから信号を受け取る。走査室インターフェイス回路638を経て、患者位置決め装置640は、走査中、患者を所望の位置に動かすコマンドを受け取る。
【0054】
RF装置626で形成されたデジタルMR信号サンプルは、データ取得サーバ620で受信される。データ取得サーバ620は、ワークステーション610からダウンロードされる指示に呼応して、実時間MRデータを受け取り、過剰データによるデータ損失を防ぐバッファ蓄積部を提供する。幾つかの走査で、データ取得サーバ620は、取得したMRデータをデータ処理サーバ622に送るだけの場合がある。しかし、取得したMRデータから誘導される情報で、走査の更なる実行を制御する走査の場合、データ取得サーバ620は、そのような情報を形成するようにプログラムされ、情報をパルス系列サーバ618に運ぶ。例えば、予備走査中、MRデータが取得され、そのMRデータは、パルス系列サーバ618で実行されるパルス系列の較正に使用される。又、自動信号を走査中に取得させ、RF又は傾斜装置の操作変数の調整、又は、k空間が採取される視野順の制御に使用できる。データ取得サーバ620は、磁気共鳴血管造影(MRA)走査での造影剤の到達の検出に使用されるMR信号の処理に使用しても良い。全ての実施例で、データ取得サーバ620は、MRデータを取得し、そのデータを実時間で処理し、走査の制御に使用される情報を形成する。
【0055】
データ処理サーバ622は、データ取得サーバ620からMRデータを受け取り、ワークステーション610からダウンロードされた指示に従い、そのデータを処理する。処理は、例えば、2又は3次元画像を形成するための未処理k空間MRデータのフーリエ変換、フィルタの再構成画像への適用、取得MRデータの逆投影法画像再構成の実施、機能MR画像の計算、及び、動画又は流れる画像の計算等を含む。
【0056】
データ処理サーバ622で再構成された画像は、ワークステーション610に戻されて蓄積される。実時間画像が、データベースメモリキャッシュ(図示せず)に蓄積される。キャッシュから、磁石装置630近傍に位置する操作表示部612又は表示部642に向けて、担当医の使用に出力される。バッチモード画像又は選択された実時間画像は、ディスク蓄積部644上のホストデータベースに蓄積される。画像が再構成され、蓄積部に転送されると、データ処理サーバ622は、ワークステーション610のデータ蓄積サーバ623に通知する。操作者は、画像の保管、フィルムの形成、又は、画像をネットワーク経由で他の施設に送るためにワークステーション610を使用する。
【0057】
従来のMRI装置を本発明で使用できるが、1つの実施形態では、医者の接近を可能にする設計にしたMRI装置を使用する。特に図7に示すように、術中MR画像処理が実施される時、患者は、磁石装置630内に配置され、患者の関与領域を、2つの離れた磁石の輪690、692間に位置する装置の等角点近傍に位置させる。磁石の輪690、692間に立つ医師は、患者の重要な領域への接近に制限されない。処置中、患者は動いても良く、医師が動かしても良い。集束超音波(FUS)切除装置680に接続された超音波振動子(図示せず)を医師が操作し、患者の選択した領域を治療しても良い。表示部642に形成される画像を、医師が、切除装置の支援及び治療終了の決定に使用できる。
【0058】
画像再構成
【0059】
図8を参照されたい。本発明の実施形態は、画像装置で画像データの取得で開始する(ステップ800)。図4A、4Bに示すようなCアームX線画像装置で実施する場合、画像データは、X線投影空間を採取する一連のX線投影として取得される。図6、7に示すようなMRI装置で実施する場合、画像データは、k空間を採取する一連のk空間投影として取得される。1つの実施形態として、取得された画像データは、時間分解画像データで、画像フレームの時系列に対応する。より具体的には、「画像フレーム」は、対応する時点で取得される画像データ又は「タイムフレーム」から再構成される。
【0060】
取得された画像データから、次に、初期画像フレームが、各々の対応するタイムフレームに対し再構成される(ステップ802)。これは標準的な画像再構成である。例えば、画像データがX線画像データの場合、フィルタ補正逆投影の画像再構成法が使用される。
例えば、画像データが一連のk空間投影の場合、逆投影法も使用される。他の方法として、k空間投影データを直交座標格子に再編し、従来のフーリエ変換再構成法の使用が出来る。各タイムフレームで取得される画像データは、下取りの採取で、画像の縞、画像のギザギザ等の画像の不自然さが、上記の再構成された初期画像フレームに存在する。これら初期画像フレームは、被検者の先行画像の形成に使用される(ステップ804)。例えば、先行画像は、入手できる初期画像フレームの平均化で形成される。
【0061】
続いて、得られた先行画像、取得画像データ、及び、現在入手できる初期画像フレームを使用して、対応する画像フレームの推定値を形成する(ステップ806)。画像フレーム推定値を、例えば、幾何学的再構成技術(ART)を使用して形成する。これらの画像フレーム推定値を利用して、先行画像と共に、上記記載の最小化法で被検者の最終画像フレームを再構成する(ステップ808)。特に、次の目的関数が反復して最小化される。
||Ψ1(Iave−Ip)||1+α||Ψ2It||1+βΣt=2N||Ψ3(It−It−1)||1
Ψ1、Ψ2、Ψ3:スパース変換
Iave:現在入手可能画像フレーム推定値It
Ip:先行画像
α、β:正則化変数
It:tthの画像フレーム
上覧の目的関数は、式(2)、式(7)、式(10)と少なくとも2点で異なる。第1に、目的関数の最後の項は、
βΣt=2N||Ψ3(It−It−1)||1
入手可能な画像フレーム推定値の全てに及ぶ2つの隣接する画像フレーム推定値間の差異の和である。このように、現在の画像フレームItに対する最近接画像フレームIt−1は、
式(2)、式(7)、式(10)の先行画像と同様に作用する。下取りデータから現在の画像フレームの再構成を制約するために使用される。第2として、目的関数の第1項は、
||Ψ1(Iave−Ip)||1
先行画像と入手可能な画像フレーム推定値の平均との差異を計算する。この理由から、前述の目的関数を用いる本発明の実施形態は、実時間画像の適用に適している。実時間画像の場合、データは連続して取得され、データの取得中に画像が再構成される。この方法は、例えば、X線又はMR画像装置で誘導される治療処置中で取得される画像の品質の向上を可能にする。
【0062】
適切な停止基準に達すると(ステップ810)、画像再構成法は中止され、所望の画像フレームが蓄積又はモニタに表示される。停止基準が満たされない場合、画像フレーム推定値は、目的関数の最小化の出力で更新される(ステップ812)。続いて、これら更新された画像フレーム推定値は、上覧の目的関数で利用される。典型的な停止基準は、2つの隣接する繰返しの差異が前以て設定された閾値よりも小さい場合である。
【0063】
本発明は、1つ又はそれ以上の実施形態で記載している。これら記載したものの等価物、変更、改変は可能で、本発明の範囲内になる。
【技術分野】
【0001】
本願は、表題"Method for Image Reconstruction Using Prior Image Constrained Compressed Sensing"で出願(2008年1月14日付)している米国仮出願(番号61/020,847)、及び、表題"Method for Image Reconstruction Using Prior Image Constrained Compressed Sensing"で(2008年6月9日付)出願している米国仮出願(番号61/059,891)において優先権を主張している。
【0002】
この発明は、米国政府機関の国立衛生研究所の支援(NIH EB005712及びNIH EB007021)でなされた。米国政府は、本発明に特定の権利を有する。
【背景技術】
【0003】
発明の領域は、医用画像に関し、特に画像を再構成する方法に関する。
【0004】
コンピュータ断層撮影装置において、X線源は、直交座標系のX−Y面(画像面)内で平行になる円錐形状ビームを放射する。X線ビームは、撮像する被写体(例、内科患者)を通過し、配列した放射線検出器に突き当たる。透過放射線強度は、被写体のX線ビームの減衰に依存し、各検出器は、ビーム減衰の測定となる個別の電気信号を生ずる。全ての検出器からの減衰測定は、個別に取得され、透過像、減衰像、又は、投影と呼ばれるものを形成する。
【0005】
従来のCT装置の光源及び検出器配列は、架台上で画像面内及び被写体周囲で回転させ、 X線ビームの被写体に交差する角度を常に変化させる。任意の角度での検出器配列からの透過像は、1つの視野となり、被写体の走査は、X線源及び検出器の一回転での異なる角度方向で形成される一組の視野を含む。2D走査の場合、データは、被写体から得られる2次元薄片に対応する画像の構成に処理される。2Dデータから画像を再構成する一般的な方法は、フィルタ補正逆投影法と称されている。この画像再構成処理は、走査中に取得される減衰測定を、表示部の対応するピクセルの輝度制御に使用されるCT数又はCT値(Hounsfield units)と呼ばれる整数値に変換される。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、画像再構成の方法を提供するものである。
【課題を解決するための手段】
【0007】
本発明の画像再構成法は、正確な再構成の利点を信号対ノイズ比(SNR)のゲインと組合せている。つまり、被検者の適切な先行画像を画像再構成処理に組み込んでいる。SNRの増加に加えて、本発明の方法は、分解能を一次的に増す。更に、得られる所望画像及び投影の数に対し、本発明の方法は、従来の画像再構成法(例、圧縮センシング:CS)が失敗している正確な画像再構成を与える。
【0008】
本発明は、時間分解画像データから良質の画像フレームを実時間で再構成する方法を提供する。この方法は、実時間画像方法を利用する画像誘導治療処置に適用できる。例えば、X線蛍光誘導治療処置は、本発明の方法で利点を得る。この場合、良質の画像フレームが、患者への全X線量の減少で再構成ができる。
【0009】
本発明の方法は、時系列の画像フレームでの特定画像フレームの再構成を与える。本方法は、時系列の最も近い画像フレームから現在の画像フレームを差し引く。例えば、前画像フレームが、現在の画像フレームから差し引かれる。このように、各新規に再構成された画像フレームが、動的な先行画像として使用され、現在の画像フレームを疎にする。現在の画像フレームは、更に少ない投影データから正確な再構成を可能にする。
【0010】
本発明の利点を下記明細書で説明する。記載において、添付図を用いて発明の実施形態を説明している。実施形態は、発明の範囲を限定するものでなく、発明の解釈の参照とするものである。
【図面の簡単な説明】
【0011】
【図1】本発明で利用している画像再構成法の実施形態の工程図である。
【図2】本発明で利用している画像再構成法の他の実施形態の工程図である。
【図3】本発明で利用している画像再構成法の別の実施形態の工程図である。
【図4】(A)本発明を使用するCアームX線装置の図。(B)図4AのCアームX線装置の構成図である。
【図5】(A)図4AのCアームX線装置のX線源及び検出器の図。(B)図4AのCアームX線装置で用いられるCアーム走査経路の図である。
【図6】図6は、本発明を使用する磁気共鳴画像(MRI)装置の構成図である。
【図7】図7は、本発明を使用する他の磁気共鳴画像(MRI)装置の構成図である。
【図8】図8は、本発明の実施形態の工程を説明する工程図である。
【発明を実施するための形態】
【0012】
一般的に、一組のデータから画像を再構成する方法は、測定データサンプルYから所望の画像Iを推測する一連の計算ステップを含む。更に具体的には、画像再構成は、次の適合性条件を満たす。
【0013】
式(1) AI=Y
【0014】
Aはシステム行列で、一般的には、所望画像Iを取得データサンプルYに関連付ける前方投影演算子として見なせる。コンピュータ断層撮影(CT)画像の処理の場合、システム行列は再投影操作を含む。式(1)の適合性条件は、別の言葉で言えば、画像が忠実に再構成される時、前方演算は、測定した投影データの正確な推定値を生成するために、実データ取得手続に略似ているべきである。
【0015】
本発明の実施で使用する画像再構成法は、良質の画像を提供する。「先行画像」は、圧縮センシング(CS)原理が利用されている反復画像再構成法を抑制するために使用されている。例えば、CSで一般に使用されているスパース変換に加えて、画像を所望画像から先行画像を取り去って更に疎にする。その結果、CS法で要求されるよりも少ないサンプル数の使用で、画像が正確に再構成される。
【0016】
更に具体的には、先行画像Ip及び再構成する所望画像Iにおいて、画像再構成の本発明の方法は、次の目的関数の最小化で達成される。
【0017】
式(2) α||Ψ1(I−Ip)||1+(1−α)||Ψ2I||1
Ψ1、Ψ2:スパース変換
||...||1:L1ノルム演算
α:目的関数式(2)の2つの項の相対的重みの制御に利用される正則化変数
【0018】
上記から、次式
式(3) ||x||1=Σi=1N|xi|
は、N次元ベクトルxのL1ノルムを意味する。一般的には、真のL1ノルムからの偏差は、所望画像に適切な画質を維持する限り可能である。例えば、目的関数式(2)は、次式に一般化できる。
【0019】
式(4) α||Ψ1(I−Ip)||p+(1−α)||Ψ2I||p
||...||p:次の形式を有するLpノルム演算
式(5) ||x||p=(Σi=1N|xj|p)1/p
【0020】
上記のように、好ましくはp=1.0であるが、しかし、異なるp値が可能である。
【0021】
当業者には周知であるが、p値が1.0から更に外れると、再構成した所望画像の劣化が一層明白になる。
【0022】
式(2)でのスパース変換Ψ1、Ψ2は一般的には異なるが、同一であっても良い。例次的なスパース変換は、ウェーブレット変換、1次差分、2次差分、及び、次式の離散階調変換を含んでいる。
式(6) ▽m,nI(m,n)=√([I(m+1,n)−I(m,n)]2+[I(m,n+1)−I(m,n)]2)
指数m、n:画像Iのピクセルの位置
▽m,nI(m,n)で特定される画像は、通常、「階調画像」と称されている。
【0023】
目的関数式(2)の両方の項が重要である。重要性の結果として、正則化変数の選択αが、全体の画像再構成処理の制御に利用される。正則化変数αの選択は、先行画像Ipの選択及び手元の医療用途の選択にも依存する。例えば、目的関数式(2)の第2項は、先行画像Ipから潜在的に受け継ぐ縞のノイズを軽減する。実例として、α≒0.3−0.7の正則化変数の選択は、呼吸器官の画像適用には一般的に十分である。
【0024】
適合性条件式(1)を全体の画像再構成に一層良く取り込むために、ラグランジュ乗数法が利用される。この場合、適合性条件は、式(2)で設定した目的関数の最小化に更に制約を加えて使用される。新しい目的関数は、次式の形式となる。
式(7) α||Ψ1(I−Ip)||1+(1−α)||Ψ2I||1+λ||X||22
λ:ラグランジュ乗数
X:差分行列
||...||22:平方L2ノルム演算
N次元ベクトルxに対し、L2ノルムは次式となる。
式(8) ||x||22=Σi=1Nxi2
【0025】
式(7)の差分行列は、適合性条件式(1)から成り、次式となる。
式(9) X=AI−Y
【0026】
ラグランジュ乗数λは、本発明の実施で使用される特定の画像装置に対し経験的に決定される。例えば、ラグランジュ乗数λは、所望のデータ適合性条件と先行画像Ipの類似性との間で所定の交換条件で決定される。大きいラグランジュ乗数λが選択されると、再構成された画像は、低ノイズ分散を有する。しかし、先行画像に特徴な高い空間分解能の損失となる。小さいラグランジュ乗数λが使用されると、先行画像の特徴である高い空間分解能が維持されるが、ノイズ分散が所望の画像で高くなる。このような状況は、利用される画像装置で達成されるコントラスト対ノイズ比に影響を及ぼす。
【0027】
式(7)に示す目的関数は、画像装置のノイズを説明するために変更できる。この場合、次の目的関数が最小化される。
【0028】
式(10) α||Ψ1(I−Ip)||+(1−α)||Ψ2I||1+λ(XTDX)
XT:差分行列Xの転置
D:次の行列要素を有する対角行列のシステムノイズ行列
【0029】
式(11) Dij=1/σn2 (i=j),0 (i≠j)
σ2:ノイズ分散及び本発明の実施で使用される画像装置でのノイズを表す変数
例えば、X線画像装置の場合、ノイズ変数σn2は、nthのX線検出器に関連するノイズ分散である。
【0030】
図1を参照して欲しい。本発明での方法の1つの実施で式(2)の目的関数を用いている。この場合、正則化変数αの初期化で開始している(ステップ100)。正則化変数αの選択は、所望画像の散在と所望画像での先行画像の影響との間の取引を決定する。従って、正則化変数αの値は、目前の臨床用途に依存する。例えば、α≒0.3−0.7は、呼吸器系の画像用途には十分である。続いて、目的関数の式(2)の第1及び第2項が、各々初期化される(ステップ102、104)。第1項α||Ψ1(I−Ip)||の初期化は、ステップ106で始まり、先行画像Ipは、所望画像Iの推定値から差し引いて、「差分画像」を生成する。先行画像Ipの特定の選択及び所望画像Iの推定値は、画像化の手順及び特定の臨床用途に依存する。従って、これらの選択に対する異なる変更は、下記に詳細に説明する。差分画像は、次に、スパース変換Ψ1の適用で疎にさせる(ステップ108)。上記記載したように、スパース変換Ψ1は、ウェーブレット変換、1次差分、2次差分、及び、離散階調変換を含む何れの数学的演算となる。このスパース差分画像のL1ノルムは、ステップ110で計算される。この処理の結果は、ステップ112で表示される正則化変数αで重みを加える。
【0031】
目的関数の式(2)の第2項(1−α)||Ψ2I||1の初期化は、ステップ114で開始し、所望画像Iの推測値は、スパース変換Ψ2の適用で疎にされる。続いて、このスパース所望画像推定値のL1ノルムがステップ116で計算される。離散階調変換∇m,nがスパース変換Ψ2として選択されると、ステップ114、116で、所望画像推定値の全変数TVの計算として見なされる。TVは次式である。
式(12) TV(I)=||▽I||1=Σ|▽I|
【0032】
スパースした所望画像推定値のL1ノルムの計算後、結果を(1−α)で重みを付ける(ステップ118)。目的関数式(2)が、第1及び第2項を共に加えて形成される(ステップ120)。この目的関数は、例えば、非線形共役勾配法の使用で最小化される(ステップ122)。最小化処理は、停止基準が満たされるまで進められる。停止基準は、例えば、所望画像の現在推定値を前の繰返しからの所望画像の推定値との比較から成る。停止基準は、次式となる。
(式13) ΣiΣj(Iij(k+1)−Iij(k))2
Iij(k+1):ピクセル位置(i,j)での所望画像の(k+1)th推定値の値
Iij(k):ピクセル位置(i,j)での所望画像のkth推定値の値
【0033】
図2に示すように、本発明の方法の他の実施では目的関数式(7)を用い、正則化変数αの初期化で開始する(ステップ200)。続いて、目的関数式(7)の第1及び第2項を各々初期化する(ステップ202、204)。この処理は、図1のステップ102、104と同様の方法で進行する。しかし、適合性条件式(1)は、ステップ206で初期化される第3項(λ||X||22)に組み込まれている。最初に差分行列Xが生成される(ステップ208)。上記で詳細に記述したように、差分行列Xは、適合性条件式(1)に対応し、式(9)となる。
【0034】
従って、差分行列Xは、システム行列Aを所望画像Iの推定値に適用し、次に、所望画像に対応する取得された画像データYを差し引いて確定される。差分行列XのL2ノルムの二乗が計算される(ステップ210)。差分行列XのL2ノルムの二乗が生成されると、ラグランジュ乗数λを決定し、差分行列Xに重みを付けるのに使用される(ステップ212)。上記のように、目前の臨床用途に応じて、ラグランジュ乗数の経験的な決定及び値が選択される。目的関数式(7)が、第1、第2及び第3項を共に加えて生成される(ステップ220)。目的関数は、非線形共役勾配法で最小化され(ステップ222)、最小化処理は、停止基準が満たされるまで進行する。
【0035】
図3は、目的関数式(10)を使用し、正則化変数αの初期化で開始する(ステップ300)他の実施形態である。続いて、目的関数式(10)の第1及び第2項が各々初期化される(ステップ302、304)。この処理は、図1に示すステップ102、104と同様の方法で進行する。しかし、適合性条件式(1)及び画像装置でのノイズの影響は、第3項λ(XTDX)に取り込んでいる(ステップ306)。最初に、差分行列Xが生成され(ステップ308)、図2のステップ208に記載するように、システムノイズ行列Dが生成される(ステップ310)。システムノイズ行列Dは、次式で決定される行列要素を有する対角行列である。
式(14) Dij=1/σn2 (i=j),0 (i≠j)
【0036】
上記したように、σn2は、ノイズ分散で、本発明の実施で使用した画像装置のノイズを表す変数である。例えば、X線画像装置の場合、ノイズ変数σn2は、nthのX線検出器に関連するノイズ分散である。システムノイズ行列Dが生成されると、次の行列乗算が実行される(ステップ312)。
(式15) XTDX
【0037】
この演算の結果は、続いて、ラグランジュ乗数で重みが付けられる(ステップ314)。目的関数式(10)は、続いて、第1、第2及び第3項を共に加えて形成される(ステップ320)。目的関数は、例えば非線形共役勾配法の使用で最小化される(ステップ322)。この最小化処理は、停止基準が満たされるまで進行する。
【0038】
CアームX線画像装置
【0039】
本発明の実施形態の画像再構成に使用したX線装置(特に、図4A及び図4B)は、治療処置に関連した使用に設計されている。一端部でX線源装置412と他端部でX線検出器配列装置414とを担持するCアーム410を有する架台が特徴である。架台は、台416上の患者の回りで、X線源412及び検出器414を異なる位置及び角度に向けることが可能で、医師の患者への接近を可能にしている。
【0040】
架台は、台416下に延びている水平脚420と、台416から離れ、水平脚420の端部で上部に延在する垂直脚422と、を有しているL形状の台座418を有している。 支持腕424は、垂直脚422の上端に回転可能に取付けられ、水平の旋回軸426に対し回転できる。旋回軸426は、台416の中心線に並んでおり、腕424は、旋回軸426から径方向上部に延在し、その外端部でCアーム駆動装置427を支持している。Cアーム410は、駆動装置427に摺動可能に固定され、駆動モータ(図示せず)に結合されている。駆動モータは、Cアーム410を摺動させ、C軸428に対し回転させる(矢印430)。旋回軸426及びC軸428は、台416上に位置する等角点で互いに垂直に交差している。
【0041】
X線源装置412は、Cアーム410の一端部に取付けられ、検出器配列装置414は、他端部に取付けられている。下記に詳細に記載するが、X線源412は、検出器414に向かう円錐状ビームのX線を放射する。両装置412、414は、旋回軸426に径方向内側に延在し、円錐状ビームの中心光が装置の等角点436を通過する。円錐状ビームの中心光を、装置の等角点に対し、台416上に載せた被検者からのX線減衰データ取得中、旋回軸426又はC軸428の周り、又は、双方で回転できる。
【0042】
図5Aに示すように、X線源装置412は、電圧を加えると円錐状433のX線ビームを放射するX線源432を備えている。中心光434は、装置の等角点436を通過し、検出装置414に格納されている2次元平坦パネルのデジタル検出器438に当たる。検出器438は、2048×2048要素の2次元配列の検出器素子で、41cm×41cmの寸法を有している。各素子は、患者を通過して突き当たったX線強度及びX線の減衰を表す電気信号を生成する。走査中、X線源432及び検出器配列438は、装置の等角点436で回転し、異なる角度からの減衰投影データを取得する。検出器配列は、毎秒30の投影又は視野の取得が可能で、これが幾つの視野が所定の走査通過と速度で取得される制限要因となる。
【0043】
装置412、414の回転及びX線源432の操作は、CT装置の制御機構部440で制御されている(図4B参照)。制御機構部440は、X線源432に電力及びタイミング信号を与えるX線制御部442を含んでいる。制御機構部440のデータ取得装置(DAS)444は、検出器素子438からのデータを採取し、そのデータを画像再構成部445に送る。画像構成部445は、DSA444からデジタル化したX線データを受け取り、本発明の方法で高速の画像再構成を実行する。再構成された画像は、大容量記憶デバイス449に画像を蓄積又は画像を更に処理するコンピュータ446に入力として適用される。
【0044】
制御機構部440は、旋回軸モータ制御部447及びC軸モータ制御部448も含んでいる。コンピュータ446からの動作コマンドに応じて、モータ制御部447、448は、旋回軸426及びC軸428で各々の回転を生成するX線装置のモータに電力を供給する。コンピュータ446で実行されるプログラムは、モータ駆動部447に動作コマンドを生成し、所定の走査経路で装置412、414を動かす。
【0045】
コンピュータ446は、キーボード及び他の手動操作制御部を有するコンソール450を介した操作者からのコマンド及び走査変数を受け取る。関与する陰極線管表示部は、操作者の再構成された画像及びコンピュータ446からのほかのデータの観察が可能である。操作者が与えたコマンドは、蓄積されたプログラムの指示に従うコンピュータ446で使用され、DAS444、X線制御部442及びモータ制御部448に制御信号及び情報を与える。加えて、コンピュータ446は、装置の等角点436に患者を位置付ける電動台416を制御する台のモータ制御部454を操作する。
【0046】
上記記載のX線装置は、蛍光透視法で操作し実時間で2次元画像を生成できる。主として、このモードの使用は、患者にカテーテル法を実施し、蛍光透視法を処置の誘導に使用する場合である。誘導されている器具及びその周囲組織が十分に見えるSNRの画像フレームが生成されるのが好ましい。更に、実時間に近い処置画像を与えるフレーム速度及び可能な限り低いX線量となる画像フレームの形成が望ましい。
【0047】
磁気共鳴画像装置
【0048】
図6は、本発明の実施形態のMRI装置を示す。MRI装置は、表示部612及びキーボード612を有するワークステーション610を含む。ワークステーション610は、市販で入手可能なOSで動作する市販で入手可能な機械の演算部616を含む。ワークステーション610は、MRI装置に走査指示の登録を可能とする操作インターフェイスを与える。ワークステーション610は、パルス系列サーバ618、データ取得サーバ620、データ処理サーバ622、及び、データ蓄積サーバ623の4つのサーバに接続されている。ワークステーション610及び各サーバ618、620、622、623は、互いに通信可能に接続されている。
【0049】
パルス系列サーバ618は、ワークステーション610からダウンロードした命令に応じて作用し、傾斜装置624及びRF装置626を操作する。所定の走査の実行に必要な傾斜波形が形成され、傾斜装置624に適用される。傾斜装置624は、装置628内の傾斜コイルを励起し、磁場傾斜Gx、Gy、Gzを生成し、MR信号の位置エンコードに使用される。傾斜コイル装置628は、分極磁石632及びRFコイル634全体を含む磁石装置630の部分を形成する。
【0050】
RF励起波形は、RF装置626によりRFコイル634に加えられ、所定の磁気共鳴パルス系列を実施する。RFコイル634又は別個の局在コイル(図6に図示せず)で検出される応答MR信号は、パルス系列サーバ618で形成されるコマンドの指令で、RF装置626での受け取り、増幅、復調、フィルター及びデジタル化される。RF装置626は、MRパルス系列に使用される幅広いRFパルスを形成するRF送信器を含む。RF送信器は、パルス系列サーバ618からの走査指示及び走査指令に応じ、所望の周波数、位相及びパルス振幅波形を形成する。生成されたRFパルスは、RFコイル全体、又は、1つ又はそれ以上の局在コイル又はコイル配列(図6に図示せず)に加えられる。
【0051】
RF装置626は、1つ又はそれ以上のRF受信路も含んでいる。各RF受信路は、接続されたコイルで受信されるMR信号を増幅するRF増幅器と、受信MR信号のI及びQ直交成分を検出及びデジタル化する検出器とを含んでいる。受信されたMR信号の大きさは、採取点でのI及びQ成分の二乗の和の平方根、
M=√(I2+Q2)
及び、受信MR信号の位相で決定される。
φ=tan−1(Q/I)
【0052】
パルス系列サーバ618は、生理学的取得制御部636から患者データを適宜受け取る。制御部636は、患者に接続された幾つかの異なるセンサ(例、電極からのECG信号又はベローズからの呼吸信号)からの信号を受け取る。これらの信号は、パルス系列サーバ618で使用され、被検者の呼吸又は心臓の鼓動で走査の実行を同期又はゲートさせる。
【0053】
パルス系列サーバ618は、走査室インターフェイス回路638にも接続している。インターフェイス回路638は、患者の状態及び磁気装置に関連する種々のセンサから信号を受け取る。走査室インターフェイス回路638を経て、患者位置決め装置640は、走査中、患者を所望の位置に動かすコマンドを受け取る。
【0054】
RF装置626で形成されたデジタルMR信号サンプルは、データ取得サーバ620で受信される。データ取得サーバ620は、ワークステーション610からダウンロードされる指示に呼応して、実時間MRデータを受け取り、過剰データによるデータ損失を防ぐバッファ蓄積部を提供する。幾つかの走査で、データ取得サーバ620は、取得したMRデータをデータ処理サーバ622に送るだけの場合がある。しかし、取得したMRデータから誘導される情報で、走査の更なる実行を制御する走査の場合、データ取得サーバ620は、そのような情報を形成するようにプログラムされ、情報をパルス系列サーバ618に運ぶ。例えば、予備走査中、MRデータが取得され、そのMRデータは、パルス系列サーバ618で実行されるパルス系列の較正に使用される。又、自動信号を走査中に取得させ、RF又は傾斜装置の操作変数の調整、又は、k空間が採取される視野順の制御に使用できる。データ取得サーバ620は、磁気共鳴血管造影(MRA)走査での造影剤の到達の検出に使用されるMR信号の処理に使用しても良い。全ての実施例で、データ取得サーバ620は、MRデータを取得し、そのデータを実時間で処理し、走査の制御に使用される情報を形成する。
【0055】
データ処理サーバ622は、データ取得サーバ620からMRデータを受け取り、ワークステーション610からダウンロードされた指示に従い、そのデータを処理する。処理は、例えば、2又は3次元画像を形成するための未処理k空間MRデータのフーリエ変換、フィルタの再構成画像への適用、取得MRデータの逆投影法画像再構成の実施、機能MR画像の計算、及び、動画又は流れる画像の計算等を含む。
【0056】
データ処理サーバ622で再構成された画像は、ワークステーション610に戻されて蓄積される。実時間画像が、データベースメモリキャッシュ(図示せず)に蓄積される。キャッシュから、磁石装置630近傍に位置する操作表示部612又は表示部642に向けて、担当医の使用に出力される。バッチモード画像又は選択された実時間画像は、ディスク蓄積部644上のホストデータベースに蓄積される。画像が再構成され、蓄積部に転送されると、データ処理サーバ622は、ワークステーション610のデータ蓄積サーバ623に通知する。操作者は、画像の保管、フィルムの形成、又は、画像をネットワーク経由で他の施設に送るためにワークステーション610を使用する。
【0057】
従来のMRI装置を本発明で使用できるが、1つの実施形態では、医者の接近を可能にする設計にしたMRI装置を使用する。特に図7に示すように、術中MR画像処理が実施される時、患者は、磁石装置630内に配置され、患者の関与領域を、2つの離れた磁石の輪690、692間に位置する装置の等角点近傍に位置させる。磁石の輪690、692間に立つ医師は、患者の重要な領域への接近に制限されない。処置中、患者は動いても良く、医師が動かしても良い。集束超音波(FUS)切除装置680に接続された超音波振動子(図示せず)を医師が操作し、患者の選択した領域を治療しても良い。表示部642に形成される画像を、医師が、切除装置の支援及び治療終了の決定に使用できる。
【0058】
画像再構成
【0059】
図8を参照されたい。本発明の実施形態は、画像装置で画像データの取得で開始する(ステップ800)。図4A、4Bに示すようなCアームX線画像装置で実施する場合、画像データは、X線投影空間を採取する一連のX線投影として取得される。図6、7に示すようなMRI装置で実施する場合、画像データは、k空間を採取する一連のk空間投影として取得される。1つの実施形態として、取得された画像データは、時間分解画像データで、画像フレームの時系列に対応する。より具体的には、「画像フレーム」は、対応する時点で取得される画像データ又は「タイムフレーム」から再構成される。
【0060】
取得された画像データから、次に、初期画像フレームが、各々の対応するタイムフレームに対し再構成される(ステップ802)。これは標準的な画像再構成である。例えば、画像データがX線画像データの場合、フィルタ補正逆投影の画像再構成法が使用される。
例えば、画像データが一連のk空間投影の場合、逆投影法も使用される。他の方法として、k空間投影データを直交座標格子に再編し、従来のフーリエ変換再構成法の使用が出来る。各タイムフレームで取得される画像データは、下取りの採取で、画像の縞、画像のギザギザ等の画像の不自然さが、上記の再構成された初期画像フレームに存在する。これら初期画像フレームは、被検者の先行画像の形成に使用される(ステップ804)。例えば、先行画像は、入手できる初期画像フレームの平均化で形成される。
【0061】
続いて、得られた先行画像、取得画像データ、及び、現在入手できる初期画像フレームを使用して、対応する画像フレームの推定値を形成する(ステップ806)。画像フレーム推定値を、例えば、幾何学的再構成技術(ART)を使用して形成する。これらの画像フレーム推定値を利用して、先行画像と共に、上記記載の最小化法で被検者の最終画像フレームを再構成する(ステップ808)。特に、次の目的関数が反復して最小化される。
||Ψ1(Iave−Ip)||1+α||Ψ2It||1+βΣt=2N||Ψ3(It−It−1)||1
Ψ1、Ψ2、Ψ3:スパース変換
Iave:現在入手可能画像フレーム推定値It
Ip:先行画像
α、β:正則化変数
It:tthの画像フレーム
上覧の目的関数は、式(2)、式(7)、式(10)と少なくとも2点で異なる。第1に、目的関数の最後の項は、
βΣt=2N||Ψ3(It−It−1)||1
入手可能な画像フレーム推定値の全てに及ぶ2つの隣接する画像フレーム推定値間の差異の和である。このように、現在の画像フレームItに対する最近接画像フレームIt−1は、
式(2)、式(7)、式(10)の先行画像と同様に作用する。下取りデータから現在の画像フレームの再構成を制約するために使用される。第2として、目的関数の第1項は、
||Ψ1(Iave−Ip)||1
先行画像と入手可能な画像フレーム推定値の平均との差異を計算する。この理由から、前述の目的関数を用いる本発明の実施形態は、実時間画像の適用に適している。実時間画像の場合、データは連続して取得され、データの取得中に画像が再構成される。この方法は、例えば、X線又はMR画像装置で誘導される治療処置中で取得される画像の品質の向上を可能にする。
【0062】
適切な停止基準に達すると(ステップ810)、画像再構成法は中止され、所望の画像フレームが蓄積又はモニタに表示される。停止基準が満たされない場合、画像フレーム推定値は、目的関数の最小化の出力で更新される(ステップ812)。続いて、これら更新された画像フレーム推定値は、上覧の目的関数で利用される。典型的な停止基準は、2つの隣接する繰返しの差異が前以て設定された閾値よりも小さい場合である。
【0063】
本発明は、1つ又はそれ以上の実施形態で記載している。これら記載したものの等価物、変更、改変は可能で、本発明の範囲内になる。
【特許請求の範囲】
【請求項1】
被検者の時系列画像フレームを画像装置で再構成する方法が、
a)前記画像装置で前記被検者から画像データを取得するステップと、
b)前記取得した画像データを使用して先行画像を形成するステップと、
c)前記取得したデータと前記先行画像とを使用して複数の画像フレーム推定値を形成するステップと、
d)前記先行画像と前記複数の画像フレーム推定値とを使用して複数の画像フレームを再構成するステップと、
e)停止基準が満たされるまでステップd)を反復して繰り返すステップと、を含む画像再構成の方法において、
前記複数の画像フレーム推定値が、各反復後で更新されることを特徴とする画像再構成の方法。
【請求項2】
前記ステップd)が、現在のタイムフレームからの前記画像フレーム推定値と前のタイムフレームからの前記画像フレーム推定値との差異を計算することを含んでいることを特徴とする請求項1記載の画像再構成の方法。
【請求項3】
前記ステップb)が、複数の初期画像フレームを再構成し、前記複数の初期画像フレームの平均化で前記先行画像を形成することを特徴とする請求項1記載の画像再構成の方法。
【請求項4】
前記画像装置が、X線蛍光画像装置、CアームX線画像装置、磁気共鳴画像(MRI)装置、及び、治療MRI装置の少なくとも1つであることを特徴とする請求項1記載の画像再構成の方法。
【請求項5】
前記ステップc)が、代数的再構成技術(ART)を実行することを特徴とする請求項1記載の画像再構成の方法。
【請求項6】
前記ステップd)が、
||Ψ1(Iave−Ip)||1+α||Ψ2It||1+βΣt=2N||Ψ3(It−It−1)||1
の目的関数を最小化するステップを含むことを特徴とする請求項1記載の画像再構成の方法。
Ψ1:第1スパース変換
Ψ2:第2スパース変換
Ψ3:第3スパース変換
Iave:前記複数の画像フレーム推定値の平均
Ip:前記先行画像
α:第1正則化変数
It:現在のタイムフレームに対する画像フレーム推定値
β:第2正則化変数
It−1:前のタイムフレームに対する画像フレーム推定値
【請求項7】
画像装置で被検者の画像を再構成する方法が、
a)前記画像装置で前記被検者から画像データを取得するステップと、
b)前記取得した画像データを使用して前記被検者の先行画像を形成するステップと、
c)前記取得したデータと前記先行画像とを使用して現在のタイムフレームに対応する現在の画像フレーム推定値を形成するステップと、
d)新しいタイムフレームを選択し、前記現在の画像フレーム推定値を前の画像フレーム推定値として蓄積するステップと、
e)前記新しいタイムフレームに対応する前記現在の画像フレーム推定値を形成するステップc)を繰り返すステップと、
f)前記前の画像フレーム推定値、前記新しい現在の画像フレーム推定値、及び、前記先行画像を使用して、前記新しいタイムフレームに対応する画像フレームを再構成するステップとを備えていることを特徴とする画像再構成の方法。
【請求項8】
前記ステップd)〜f)が、複数のタイムフレームに対応する複数の画像フレームを形成するように繰り返されていることを特徴とする請求項7記載の画像再構成の方法。
【請求項9】
前記ステップb)が、複数の初期画像フレームを再構成し、前記複数の初期画像フレームを平均化して前記先行画像を形成することを特徴とする請求項7記載の画像再構成の方法。
【請求項10】
前記ステップc)が、代数的再構成技術(ART)の実行を含んでいることを特徴とする請求項記7載の画像再構成の方法。
【請求項11】
前記画像装置が、X線蛍光画像装置、CアームX線画像装置、磁気共鳴画像(MRI)装置及び治療MRI装置の少なくとも1つであることを特徴とする請求項7記載の画像再構成の方法。
【請求項1】
被検者の時系列画像フレームを画像装置で再構成する方法が、
a)前記画像装置で前記被検者から画像データを取得するステップと、
b)前記取得した画像データを使用して先行画像を形成するステップと、
c)前記取得したデータと前記先行画像とを使用して複数の画像フレーム推定値を形成するステップと、
d)前記先行画像と前記複数の画像フレーム推定値とを使用して複数の画像フレームを再構成するステップと、
e)停止基準が満たされるまでステップd)を反復して繰り返すステップと、を含む画像再構成の方法において、
前記複数の画像フレーム推定値が、各反復後で更新されることを特徴とする画像再構成の方法。
【請求項2】
前記ステップd)が、現在のタイムフレームからの前記画像フレーム推定値と前のタイムフレームからの前記画像フレーム推定値との差異を計算することを含んでいることを特徴とする請求項1記載の画像再構成の方法。
【請求項3】
前記ステップb)が、複数の初期画像フレームを再構成し、前記複数の初期画像フレームの平均化で前記先行画像を形成することを特徴とする請求項1記載の画像再構成の方法。
【請求項4】
前記画像装置が、X線蛍光画像装置、CアームX線画像装置、磁気共鳴画像(MRI)装置、及び、治療MRI装置の少なくとも1つであることを特徴とする請求項1記載の画像再構成の方法。
【請求項5】
前記ステップc)が、代数的再構成技術(ART)を実行することを特徴とする請求項1記載の画像再構成の方法。
【請求項6】
前記ステップd)が、
||Ψ1(Iave−Ip)||1+α||Ψ2It||1+βΣt=2N||Ψ3(It−It−1)||1
の目的関数を最小化するステップを含むことを特徴とする請求項1記載の画像再構成の方法。
Ψ1:第1スパース変換
Ψ2:第2スパース変換
Ψ3:第3スパース変換
Iave:前記複数の画像フレーム推定値の平均
Ip:前記先行画像
α:第1正則化変数
It:現在のタイムフレームに対する画像フレーム推定値
β:第2正則化変数
It−1:前のタイムフレームに対する画像フレーム推定値
【請求項7】
画像装置で被検者の画像を再構成する方法が、
a)前記画像装置で前記被検者から画像データを取得するステップと、
b)前記取得した画像データを使用して前記被検者の先行画像を形成するステップと、
c)前記取得したデータと前記先行画像とを使用して現在のタイムフレームに対応する現在の画像フレーム推定値を形成するステップと、
d)新しいタイムフレームを選択し、前記現在の画像フレーム推定値を前の画像フレーム推定値として蓄積するステップと、
e)前記新しいタイムフレームに対応する前記現在の画像フレーム推定値を形成するステップc)を繰り返すステップと、
f)前記前の画像フレーム推定値、前記新しい現在の画像フレーム推定値、及び、前記先行画像を使用して、前記新しいタイムフレームに対応する画像フレームを再構成するステップとを備えていることを特徴とする画像再構成の方法。
【請求項8】
前記ステップd)〜f)が、複数のタイムフレームに対応する複数の画像フレームを形成するように繰り返されていることを特徴とする請求項7記載の画像再構成の方法。
【請求項9】
前記ステップb)が、複数の初期画像フレームを再構成し、前記複数の初期画像フレームを平均化して前記先行画像を形成することを特徴とする請求項7記載の画像再構成の方法。
【請求項10】
前記ステップc)が、代数的再構成技術(ART)の実行を含んでいることを特徴とする請求項記7載の画像再構成の方法。
【請求項11】
前記画像装置が、X線蛍光画像装置、CアームX線画像装置、磁気共鳴画像(MRI)装置及び治療MRI装置の少なくとも1つであることを特徴とする請求項7記載の画像再構成の方法。
【図1】

【図2】
【図3】
【図4】

【図5A】
【図5B】

【図6】
【図7】
【図8】

【図2】
【図3】
【図4】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【公表番号】特表2011−509717(P2011−509717A)
【公表日】平成23年3月31日(2011.3.31)
【国際特許分類】
【出願番号】特願2010−542431(P2010−542431)
【出願日】平成21年1月14日(2009.1.14)
【国際出願番号】PCT/US2009/030994
【国際公開番号】WO2009/091824
【国際公開日】平成21年7月23日(2009.7.23)
【出願人】(390023641)ウイスコンシン アラムナイ リサーチ ファウンデーシヨン (61)
【氏名又は名称原語表記】WISCONSIN ALUMNI RESEARCH FOUNDATION
【Fターム(参考)】
【公表日】平成23年3月31日(2011.3.31)
【国際特許分類】
【出願日】平成21年1月14日(2009.1.14)
【国際出願番号】PCT/US2009/030994
【国際公開番号】WO2009/091824
【国際公開日】平成21年7月23日(2009.7.23)
【出願人】(390023641)ウイスコンシン アラムナイ リサーチ ファウンデーシヨン (61)
【氏名又は名称原語表記】WISCONSIN ALUMNI RESEARCH FOUNDATION
【Fターム(参考)】
[ Back to top ]