
先行車両情報提示システム
【課題】 追従走行の失敗の頻度を低減することができる先行車両情報提示システムを提供する。
【解決手段】 先行車両情報提示システム100は、先行車両200と後続車両201との間で無線通信を行い、先行車両200のウインカー操作の情報を運転者に提示するものである。この先行車両情報提示システム100は、先行車両と後続車両とにそれぞれ搭載される車載機1を備えている。先行車両200の車載機1は、先行車両のウインカー操作の情報を無線送信する。一方、後続車両201の車載機1は、無線送信されたウインカー情報を受信して後続車両201の運転者に提示する。この際、後続車両201の車載機1は、先行車両200及び後続車両201の少なくとも一方の走行状況から、ウインカー情報の提示タイミングを早めるべきか遅らせるべきかを判断し、判断したタイミングでウインカー情報を提示する。
【解決手段】 先行車両情報提示システム100は、先行車両200と後続車両201との間で無線通信を行い、先行車両200のウインカー操作の情報を運転者に提示するものである。この先行車両情報提示システム100は、先行車両と後続車両とにそれぞれ搭載される車載機1を備えている。先行車両200の車載機1は、先行車両のウインカー操作の情報を無線送信する。一方、後続車両201の車載機1は、無線送信されたウインカー情報を受信して後続車両201の運転者に提示する。この際、後続車両201の車載機1は、先行車両200及び後続車両201の少なくとも一方の走行状況から、ウインカー情報の提示タイミングを早めるべきか遅らせるべきかを判断し、判断したタイミングでウインカー情報を提示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、先行車両情報提示システムに関する。
【背景技術】
【0002】
従来、先行車両と後続車両とが同じ目的地等を目指してグループ走行することが行われている。また、グループ走行を円滑に行うために、先行車両の運転者が目的地を入力し目的地までの推奨経路が算出されると、推奨経路の情報を後続車両に送信するナビゲーション装置が知られている(例えば特許文献1参照)。
【特許文献1】特開2001−317953号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来装置では、後続車両が推奨経路の通りに走行できなくなる場合が少なからずあった。
【0004】
本発明はこのような従来の課題を解決するためになされたものであり、その目的とするところは、追従走行の失敗の頻度を低減することができる先行車両情報提示システムを提供することにある。
【課題を解決するための手段】
【0005】
本発明の先行車両情報提示システムは、先行車両と先行車両に追従して走行する後続車両との間で無線通信を行い、先行車両のウインカー操作の情報を運転者に提示するものである。この先行車両情報提示システムは、先行車両と後続車両とにそれぞれ搭載される車載機を備えている。先行車両の車載機は、先行車両のウインカー操作の情報を取得する先行車両情報取得手段と、先行車両情報取得手段により取得された先行車両のウインカー情報を無線送信する送信手段とを有している。一方、後続車両の車載機は、送信手段により無線送信されたウインカー情報を受信する受信手段と、受信手段により受信されたウインカー情報を後続車両の運転者に提示する提示手段と、先行車両及び後続車両の少なくとも一方の走行状況から、ウインカー情報の提示タイミングを早めるべきか遅らせるべきかを判断し、判断したタイミングで提示手段にウインカー情報を提示させるタイミング補正手段とを有している。
【発明の効果】
【0006】
本発明によれば、先行車両及び後続車両の少なくとも一方の走行状況から、ウインカー情報の提示タイミングを早めるべきか遅らせるべきかを判断し、判断したタイミングでウインカー情報を提示させることとしている。このため、先行車両及び後続車両の少なくとも一方の走行状況に応じて適切なタイミングでウインカー情報が提示されることとなり、追従走行の失敗の頻度を低減することができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の好適な実施形態を図面に基づいて説明する。なお、各図において、同一又は同様の要素には同一の符号を付して説明を省略するものとする。
【0008】
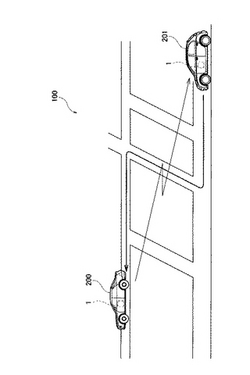
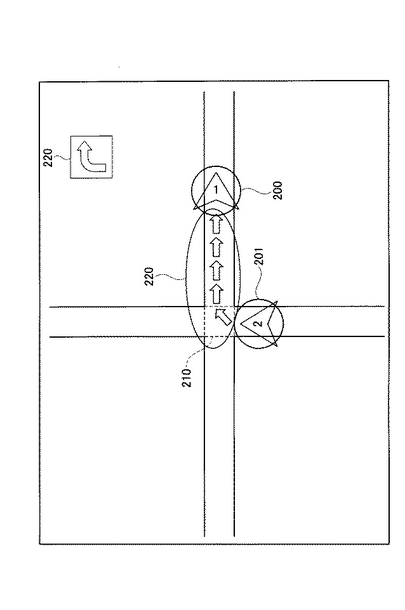
まず、先行車両情報提示システムについて説明するに先立って、本願発明者らが本願発明を創作するに至った経緯を説明する。図1は、先行車両のウインカー操作の情報及びその提示タイミングを示す従来技術の説明図である。同図に示すように、先行車両200に後続車両201が追従している場合、先行車両200が交差点210で右折したとする。このとき、右折時のウインカー操作の情報が先行車両200から後続車両201に送信され、後続車両201では、運転者に右折を促すべくウインカー情報220が提示される。
【0009】
しかし、交差点210よりも手前に存在する別の交差点211に後続車両201が差し掛かる前にウインカー情報220が提示されると、後続車両201の運転者は別の交差点211にて右折するものと勘違いし、先行車両200に追従できなくなる可能性がある。特に、後続車両201において詳細地図等を表示することができず、簡易的にしかウインカー情報220を提示できない場合には、上記の勘違いが生じやすく、後続車両201が先行車両200に追従できなくなる可能性は一層高まる。
【0010】
このような事情のもと、本願発明者らは、以下の実施形態に係る先行車両情報提示システムを創作するに至り、追従走行の失敗の頻度を低減することとした。以下、実施形態に係る先行車両情報提示システムを説明する。
【0011】
なお、上記したウインカー情報220とはウインカー操作を促す情報であり、図1に示したように右折を促す右折マークはもちろんのこと車線変更や左折など促す情報について含まれるものである。
【0012】
図2は、本発明の第1実施形態に係る先行車両情報提示システムの構成図である。同図に示すように、先行車両情報提示システム100は、先行車両200と先行車両200に追従して走行する後続車両201との間で無線通信を行い、先行車両200のウインカー操作の情報を後続車両201の運転者に提示するものである。この先行車両情報提示システム100は、先行車両200と後続車両201とにそれぞれ搭載される車載機1からなっており、これらの車載機1がそれぞれ無線通信する構成となっている。
【0013】
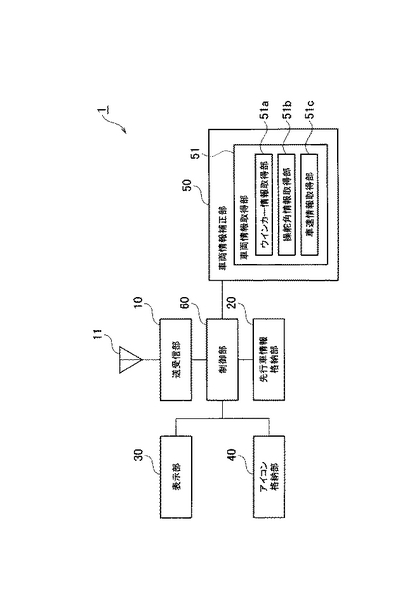
図3は、図2に示した車載機1の詳細構成図である。同図に示すように、車載機1は、送受信部(送信手段、受信手段)10と、先行車情報格納部20と、表示部(提示手段)30と、アイコン格納部40と、車両情報補正部(タイミング補正手段)50と、制御部60とを備えている。
【0014】
送受信部10は、他の車載機1と無線通信するものであり、アンテナ11を介して情報を送受信する構成となっている。また、送受信部10は狭域無線通信を行うものであり、具体的には無線LAN(IEEE802.11bやIEEE802.11g等の無線によるLANを指す)による通信や、ETC通信やDSRC通信などを行うものである。また送受信部10は、携帯電話やPHSなどの広域無線通信を行う構成であってもよい。
【0015】
先行車情報格納部20は、先行車両200から送られてきたウインカー情報等を記憶しておくものである。表示部30は、先行車両200のウインカー情報を運転者に提示するためのものであり、望ましくは先行車両200と後続車両201とを含んだ状態で地図表示できる機能を備えるものである。
【0016】
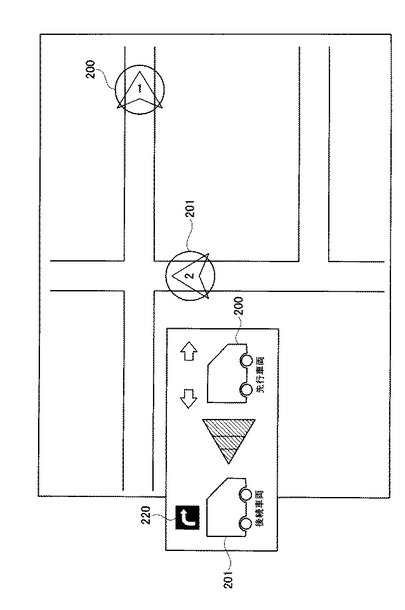
図4は、表示部30による地図表示の一例を示す説明図である。同図に示すように、先行車両200が交差点210において右折した場合、後続車両201が交差点210に差し掛かると、表示部30は、右折マークにて右折を促すウインカー情報220や、先行車両200の軌跡を示すことにより右折を促すウインカー情報220を表示する。
【0017】
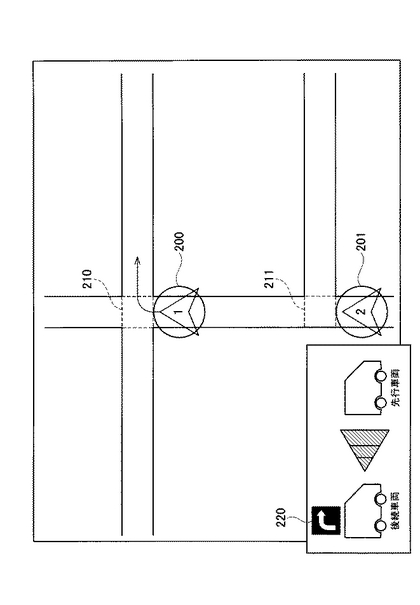
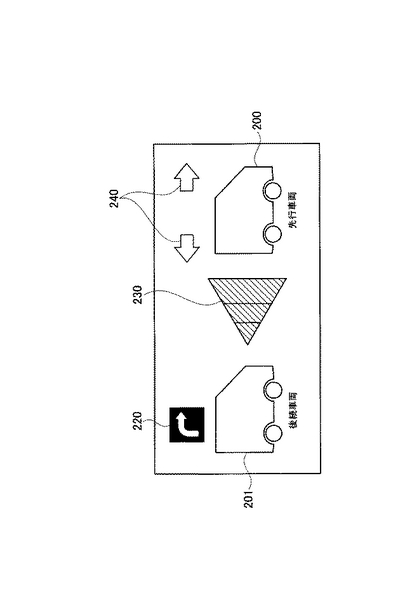
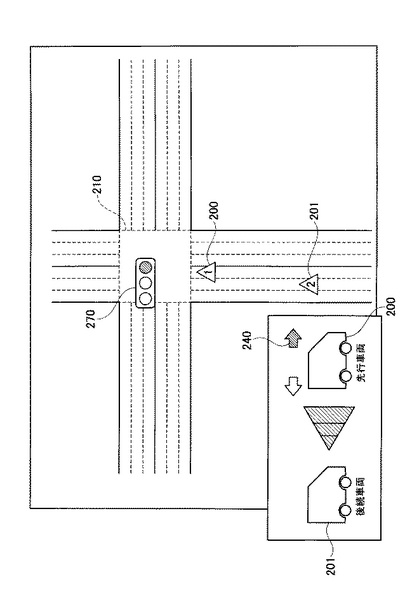
図5は、表示部30による簡易表示の一例を示す説明図である。表示部30は、簡易表示するとき、図5のような画像を表示する。同図に示すように、表示部30は、先行車両200と後続車両201とを示すアイコンを表示している。また、表示部30は、先行車両200と後続車両201との間に、両者の距離又はスループットを示す情報230を表示している。さらに、後続車両201のアイコン上部にウインカー情報220を表示し、先行車両200のアイコン上部には先行車両200のウインカー情報240などを表示する。
【0018】
再度、図3を参照する。アイコン格納部40は、先行車両200をアイコン表示するときに必要とされるアイコンの画像を記憶したものであり、具体的には図4及び図5に示すようなアイコンを記憶している。車両情報補正部50は、後続車両201の運転者にウインカー情報220を提示するタイミングを、適切なタイミングに補正するものである。制御部60は、車載機1の全体を制御するものであり、CPUなどによって構成され、上記各部10〜50それぞれに接続されている。
【0019】
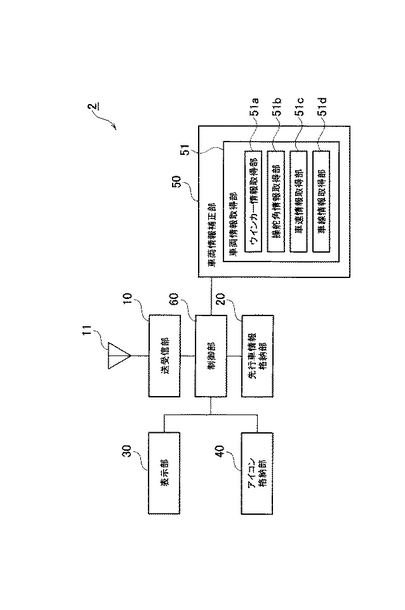
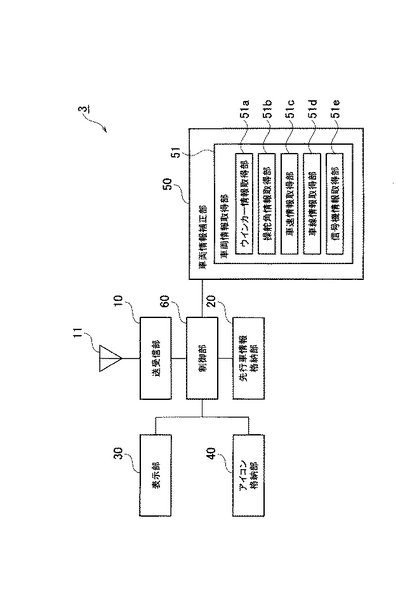
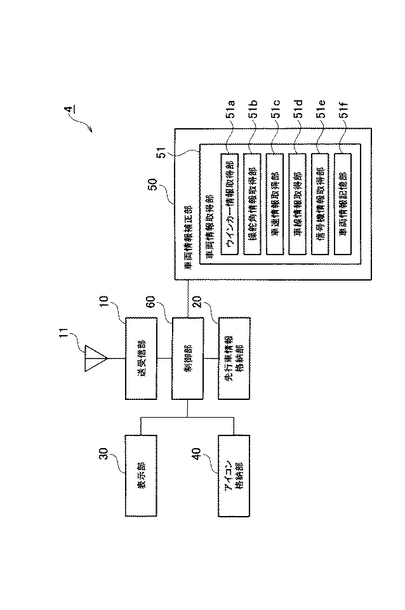
また、上記車両情報補正部50は、車両情報取得部(先行車両情報取得手段、後続車両車両情報取得手段)51を備えている。車両情報取得部51は、ナビゲーションシステムなどに接続され、現在位置や走行中の道路の形状など、種々の情報を取得する構成となっている。また、車両情報取得部51は、車両運転者のウインカーの操作状況を示す情報を取得するウインカー情報取得部51a、ハンドルの操舵角の情報を取得する操舵角情報取得部51b、及び車両の速度の情報を取得する車速情報取得部51cを有している。さらに、車両情報取得部51は取得した情報を車両情報補正部50に与える構成となっている。また、車両情報補正部50は、車両情報取得部51からの情報に基づいて、ウインカー情報220を提示するタイミングを早めるべきか遅らせるべきかを判断するようになっている。
【0020】
このような先行車両情報提示システム100によれば、まず、先行車両200の車載機1が動作する。そして、車両情報取得部51がウインカー情報取得部51aからウインカー情報を取得する。
【0021】
また、車両情報取得部51は、ウインカー情報220に加えて、先行車両200の走行状況の情報を、操舵角情報取得部51b、車速情報取得部51c及びナビゲーションシステム(図示せず)などから取得する。ここで、走行状況情報とは、自車両の状態(例えば車速やエンジン回転数)を示す情報や、走行時における環境(例えば天候や走行道路の形状)を示す情報などをいう。
【0022】
その後、送受信部10は、車両情報取得部51により取得された先行車両200のウインカー情報220及び走行状況情報を送信する。そして、後続車両201の車載機1の送受信部10が先行車両200のウインカー情報220及び走行状況情報とを受信する。
【0023】
次いで、後続車両201の車両情報取得部51は、後続車両201の走行状況の情報を取得する。そして、車両情報補正部50は、車両情報取得部51により取得された後続車両201の走行状況の情報と、送受信部10により受信された先行車両200の走行状況の情報とを読み込む。
【0024】
その後、表示部30は、送受信部10により受信されたウインカー情報220を後続車両201の運転者に提示する。この際、車両情報補正部50は、先行車両200及び後続車両201の少なくとも一方の走行状況から、ウインカー情報220の提示タイミングを早めるべきか遅らせるべきかを判断し、判断したタイミングで表示部30にウインカー情報を提示させる。
【0025】
これにより、例えば、先行車両200が交差点を右折するときには周囲の車両が少なく車線変更等がスムーズであったが、後続車両201が交差点を右折しようとするときには周囲の車両が多く車線変更等がスムーズでない場合などに、ウインカー情報220の提示タイミングを早めるなどして、追従走行の失敗の頻度を低減することができる。
【0026】
なお、車両情報補正部50は、先行車両200及び後続車両201の少なくとも一方の走行状況から、ウインカー情報の提示タイミングを判断しているが、望ましくは先行車両200の走行状況の情報から、ウインカー情報の提示タイミングを判断するとよい。また、より望ましくは、先行車両200及び後続車両201の走行状況の情報から、ウインカー情報の提示タイミングを判断するとよい。
【0027】
次に、第1実施形態に係る先行車両情報提示システム100の詳細な動作を説明する。図6は、第1実施形態に係る先行車両情報提示システム100の詳細な動作を示すフローチャートである。
【0028】
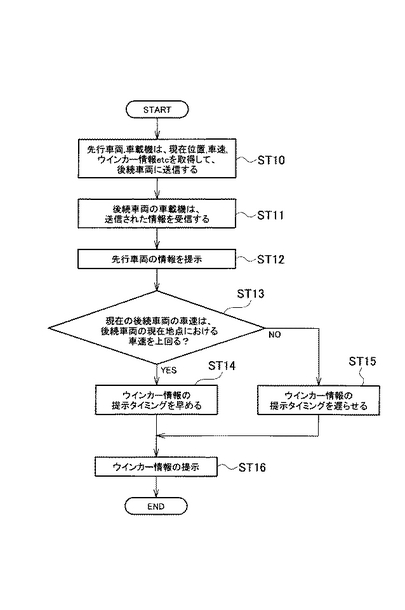
同図に示すように、先行車両情報提示システム100は、まず、先行車両200の車両情報取得部51が先行車両200の現在位置、車速及びウインカー情報等を取得し、これら情報を送受信部10が送信する(ST10)。すなわち、先行車両200の車載機1は、ウインカー情報220と走行状況情報とを送信する。
【0029】
次いで、後続車両201の送受信部10は、送信された現在位置、車速及びウインカー情報等を受信する(ST11)。すなわち、後続車両201の車載機1は、ウインカー情報220と先行車両200の走行状況情報とを受信する。
【0030】
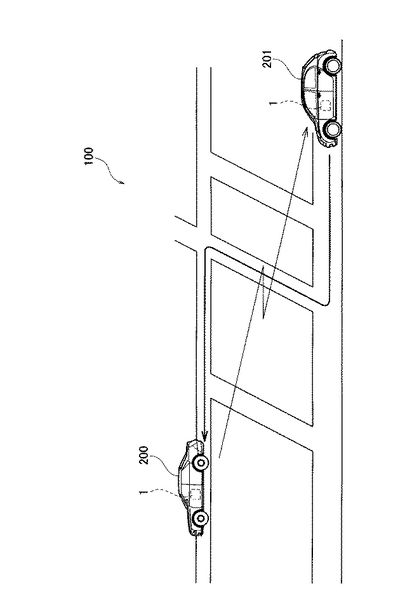
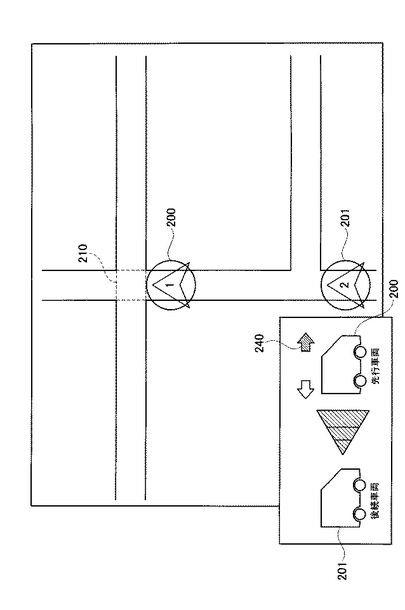
次に、後続車両201の表示部30は、先行車両200の情報を提示する(ST12)。図7は、図6のステップST12における情報提示の一例を示す説明図である。同図に示すように、後続車両201の表示部30は、例えば先行車両200が交差点210を右折しようとしている場合、先行車両200の走行状況情報(現在位置など)と共に、先行車両200のウインカー240を提示することとなる。
【0031】
再度、図6を参照する。先行車両200の情報を提示した後、後続車両201の車両情報補正部50は、現在の後続車両201の車速が後続車両201の現在地点における車速を上回るか否かを判断する(ST13)。そして、現在の後続車両201の車速が後続車両201の現在地点における車速を上回ると判断した場合(ST13:YES)、車両情報補正部50は、ウインカー情報220の提示タイミングを早めるべきと判断する(ST14)。ここで、後続車両201の車速が先行車両200の車速を上回る場合、後続車両201は先行車両200よりもブレーキング等を早期に行わなければならない。このため、車両情報補正部50は、後続車両201の車速が先行車両200の車速を上回る場合、減速を促すべくウインカー情報220の提示タイミングを早めるべきと判断する。
【0032】
他方、現在の後続車両201の車速が後続車両201の現在地点における車速を上回らないと判断した場合(ST13:NO)、車両情報補正部50は、ウインカー情報220の提示タイミングを遅らせるべきと判断する(ST15)。ここで、後続車両201の車速が先行車両200の車速以下である場合、後続車両201は先行車両200よりもブレーキング等に若干の余裕があることとなる。このため、後続車両201の車速が先行車両200の車速以下である場合、車両情報補正部50は、ウインカー情報220の提示タイミングを遅らせるべきと判断する。
【0033】
そして、上記の如く、提示タイミングを判断した後(ST14,ST15の後)、表示部30は、判断された提示タイミングでウインカー情報220を提示することとなる(ST16)。その後、処理は終了し、車載機1の電源がオフされるまで、上記の処理が繰り返されることとなる。
【0034】
図8は、ウインカー情報220の提示の様子を示す説明図である。同図に示すように、後続車両201の表示部30は、例えば後続車両201に右折を促すウインカー情報220を表示する。このとき、図6のフローチャートを参照して説明したように、提示タイミングは車両情報補正部50により判断されて、適切なタイミングで表示されることとなる。また、ウインカー情報220が適切なタイミングで表示されるため、後続車両201の運転者による右折の失敗の頻度が少なくなって、追従走行の失敗の頻度を一層低減することができる。
【0035】
ここで、現在の後続車両201の車速が後続車両201の現在地点における先行車両200の車速を上回る場合、表示部30は、ブレーキを踏む旨、及びシフトダウンする旨の少なくとも一方の情報をウインカー情報220に先だって提示するようにしてもよい。
【0036】
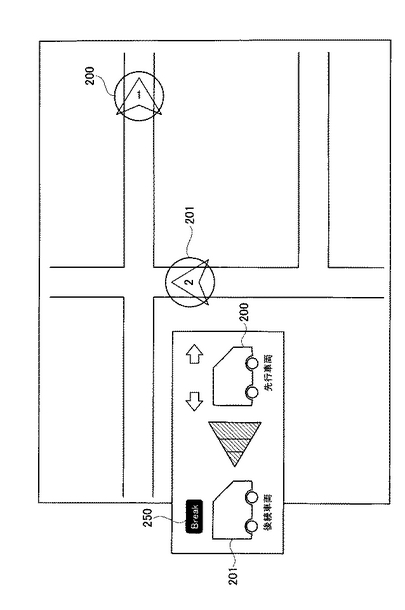
図9は、ブレーキを踏む旨の情報提示の一例を示す説明図であり、図10は、シフトダウンする旨の情報提示の一例を示す説明図である。まず、図9に示すように、表示部30は、ウインカー情報220に先だってブレーキを踏む旨の情報250を提示することとしている。このため、右左折などにあたり、早期の減速が必要な場合に減速を的確に指示することとなる。
【0037】
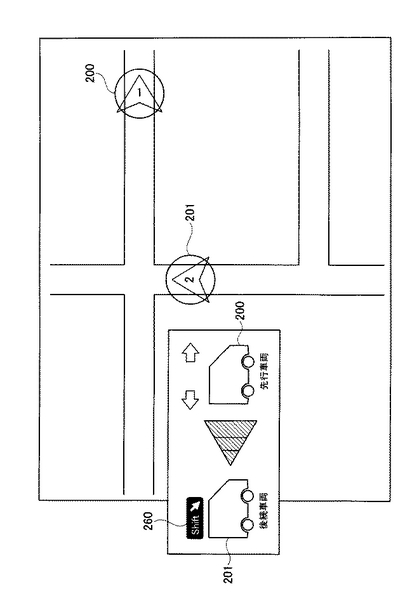
また、図10に示すようにウインカー情報220に先だってシフトダウンする旨の情報260を提示することによっても、同様に減速を的確に指示することとなる。これにより、追従走行を行いやすくなり、追従走行の失敗の頻度を一層低減することができる。
【0038】
このようにして、第1実施形態に係る先行車両情報提示システム100によれば、先行車両200及び後続車両201の少なくとも一方の走行状況から、ウインカー情報220の提示タイミングを早めるべきか遅らせるべきかを判断し、判断したタイミングでウインカー情報220を提示させることとしている。このため、先行車両200及び後続車両201の少なくとも一方の走行状況に応じて適切なタイミングでウインカー情報220が提示されることとなり、追従走行の失敗の頻度を低減することができる。
【0039】
また、先行車両200の走行状況情報から、ウインカー情報220の提示タイミングを早めるべきか遅らせるべきかを判断することとしている。このため、後続車両201よりも先に走行して得られた実際の状況によってウインカー情報220の提示タイミングが決定されることとなる。これにより、新しく道路ができた場合や、道路工事や渋滞が存在する場合などにおいても、実際に状況に応じて提示タイミングが決定されることとなり、後続車両201にはより適切なタイミングでウインカー情報220が提示されることとなる。従って、追従走行の失敗の頻度を一層低減することができる。
【0040】
また、先行車両200の走行状況情報に加えて後続車両201の走行状況情報から、ウインカー情報220の提示タイミングを早めるべきか遅らせるべきかを判断することとしている。このため、先行車両200と後続車両201との走行において一致する点や相違する点など、両者の違いに応じてウインカー情報220の提示タイミングが決定されることとなり、提示タイミングを一層適切とすることが可能となる。従って、追従走行の失敗の頻度を一層低減することができる。
【0041】
また、現在の後続車両201の車速が後続車両201の現在地点における先行車両200の車速を上回る場合に、提示タイミングを早めるべきと判断し、現在の後続車両201の車速が後続車両201の現在地点における先行車両200の車速以下である場合に、提示タイミングを遅らせるべきと判断することとしている。ここで、後続車両201の車速が先行車両200の車速を上回る場合、後続車両201は先行車両200よりもブレーキング等を早期に行わなければならない。このため、後続車両201の車速が先行車両200の車速を上回る場合、早期の減速を促すべくウインカー情報220の提示タイミングを早めるべきと判断している。一方、後続車両201の車速が先行車両200の車速以下である場合、後続車両201は先行車両200よりもブレーキング等に若干の余裕があることとなる。このため、後続車両201の車速が先行車両200の車速以下である場合、ウインカー情報220の提示タイミングを遅らせるべきと判断している。このように、先行車両200と後続車両201との車速との関係において、ウインカー情報220が適切なタイミングで提示されることとなる。従って、追従走行の失敗の頻度を一層低減することができる。
【0042】
また、後続車両201の車速が先行車両200の車速を超える場合、ブレーキを踏む旨、及びシフトダウンする旨の少なくとも一方の情報250,260をウインカー情報220に先だって提示することとしている。このため、早期の減速が必要な場合に減速を的確に指示することとなり、後続車両201の運転者は追従走行を行いやすくなる。従って、追従走行の失敗の頻度を一層低減することができる。
【0043】
なお、第1実施形態において、図6に示すフローチャートのように、ウインカー情報220の提示タイミングを早めるべきか遅らせるべきかの判断は、常時繰り返して行われているが、常時行う構成に限らず、例えば後続車両201の追従走行が乱れると予測される場合に判断する構成としてもよい。具体的には、先行車両200が右左折した場合、先行車両200が車線変更した場合、及び先行車両200が有料道路の料金所を通過する場合の少なくとも1つに該当するときに、ウインカー情報220の提示タイミングを判断するようにしてもよい。これにより、道路を直進していれば先行車両に追従できる場合など、提示タイミングの変更が不要なときに提示タイミングの変更処理を実行することがなく、処理負荷の低減を図ることができる。
【0044】
また、先行車両200の車両情報取得部51は、先行車両200の走行状況情報としてウインカー操作した時点における先行車両200から交差点までの距離の情報を取得し、車両情報補正部50は、この距離が長くなるに従ってウインカー情報220の提示タイミングを早めるべきと判断し、この距離が短くなるに従ってウインカー情報220の提示タイミングを遅らせるべきと判断するようにしてよい。ここで、ウインカー操作した時点における先行車両200から交差点までの距離とは、先行車両200の運転者が交差点を右左折等するのに必要であると判断した距離とも言える。このため、この距離が長い場合には、交差点の右左折等にあたり準備等の時間が長く必要であるといえる。一方、距離が短い場合には、交差点の右左折等にあたり準備等の時間があまり必要がないといえる。従って、ウインカー操作した時点における先行車両200から交差点までの距離に応じて、提示タイミングを判断することで、適切な提示タイミングにてウインカー情報220が提示されることとなり、追従走行の失敗の頻度を一層低減することができる。
【0045】
次に、本発明の第2実施形態を説明する。第2実施形態に係る先行車両情報提示システム100は、第1実施形態のものと同様であるが、車載機の構成及び処理内容が第1実施形態のものと一部異なっている。
【0046】
以下、第1実施形態との相違点について説明する。図11は、第2実施形態に係る車載機2の構成図である。同図に示すように、第2実施形態に係る車載機2の車両情報取得部51は、車線情報取得部51dを備えている。
【0047】
車線情報取得部51dは、現在走行している道路の車線情報を検出して取得するものである。この車線情報取得部51dは、例えば、カーナビゲーションの測位手段と車線情報を含んだ道路地図データとから走行車線の情報を取得する構成となっている。また、車線情報取得部51dは、道路脇に設置されたDSRCやビーコンなどから走行車線を取得する構成であってもよい。
【0048】
また、車線情報取得部51dを備えるため、車両情報補正部50は、後続車両201の現在地点において先行車両200が走行していた走行車線と後続車両201の現在の走行車線とが異なる場合に、ウインカー情報220の提示タイミングを早めるべきと判断する。
【0049】
ここで、走行車線が一致していないと適切に追従走行できなくなる可能性がある。例えば、走行車線が一致しない場合、後続車両201は適切に右折レーンや左折レーンに進入しておらず、右左折を失敗し追従走行できなくなる可能性がある。また、有料道路の料金所などにおいても、後続車両201は、先行車両200と同じ走行車線を走行していないと、分岐などで異なる方向に進んでしまい、追従できなくなる可能性がある。このため、走行車線が一致しない場合に提示タイミングを早めることで、後続車両201を早期に先行車両200と同じ車線に誘導して追従の失敗を減らすようにしている。
【0050】
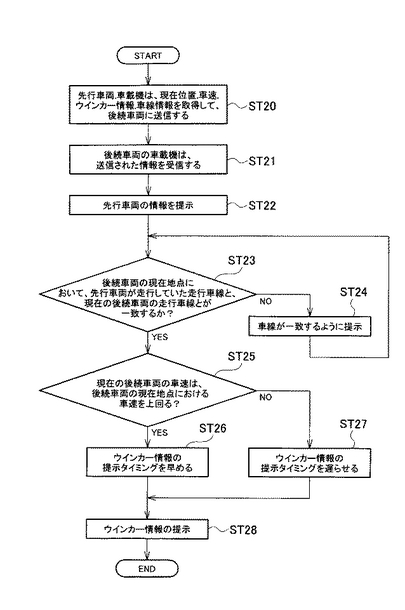
次に、第2実施形態に係る先行車両情報提示システム100の動作を説明する。図12は、第2実施形態に係る先行車両情報提示システム100の動作を示すフローチャートである。同図に示すように、先行車両情報提示システム100は、まず、先行車両200の車両情報取得部51が先行車両200の現在位置、車速、ウインカー情報、及び車線情報等を取得し、送受信部10がこれら情報を送信する(ST20)。次いで、後続車両201の送受信部10は、送信された現在位置、車速、ウインカー情報、及び車線情報等を受信する(ST21)。
【0051】
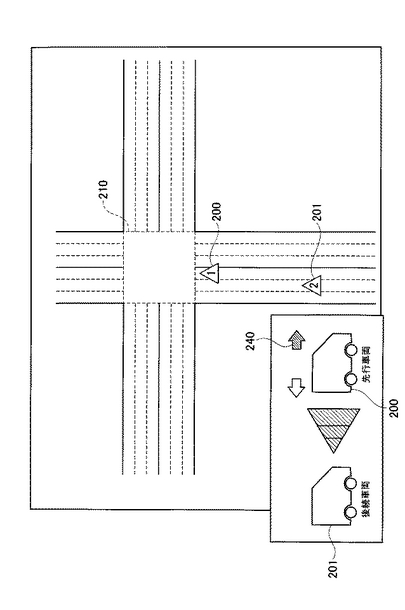
次に、後続車両201の表示部30は、先行車両200の情報を提示する(ST22)。図13は、図12のステップST22における情報提示の一例を示す説明図である。同図に示すように、後続車両201の表示部30は、例えば先行車両200が交差点210を右折しようとしている場合、先行車両200の走行状況情報(現在位置など)と共に、先行車両200のウインカー240を提示することとなる。
【0052】
再度、図12を参照する。先行車両200の情報を提示した後、後続車両201の車両情報補正部50は、後続車両201の現在地点において先行車両200が走行していた走行車線と後続車両201の現在の走行車線とが一致するか否かを判断する(ST23)。ここで、一致しないと判断した場合(ST23:NO)、車両情報補正部50は、ウインカー情報220の提示タイミングを早めるべきと判断する。そして、表示部30は、車線が位置するようにウインカー情報220を提示する(ST24)。このとき、表示部30は、待機時間等を設けず、即座にウインカー情報220を提示する。すなわち、提示タイミングを早めて提示することとなる。
【0053】
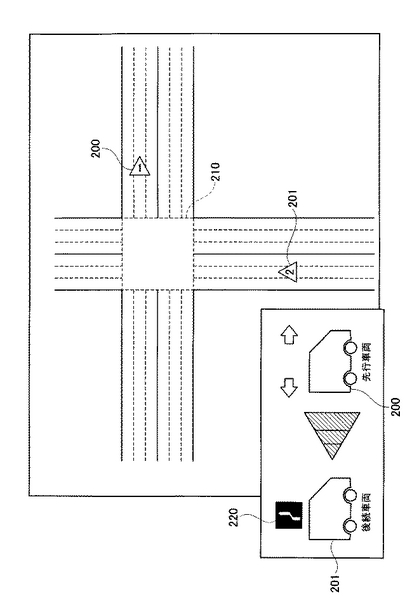
図14は、第2実施形態におけるウインカー情報220の提示の様子を示す第1の説明図である。同図に示すように、表示部30は、ウインカー情報220を表示することにより、車線変更を促している。
【0054】
再度、図12を参照する。車線変更を表すウインカー情報220を提示した後、処理はステップST23に戻る。そして、再度車線の一致が判断されることとなる。
【0055】
一方、先行車両200が走行していた走行車線と後続車両201の現在の走行車線とが一致すると判断した場合(ST23:YES)、処理はステップST25に移行する。そして、ステップST25〜ST28において、図6に示したステップST13〜ST16に示す処理と同様の処理が実行される。
【0056】
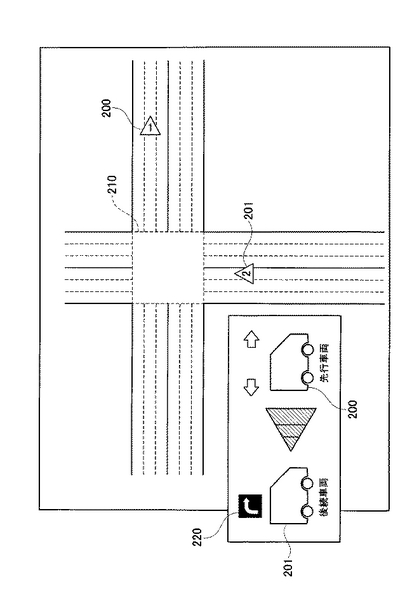
また、ステップST28において図15に示す提示が行われる。図15は、第2実施形態におけるウインカー情報220の提示の様子を示す第2の説明図である。同図に示すように、後続車両201の表示部30は、右折を促すウインカー情報220を表示する。このとき、図12のフローチャートに示すように、車速に応じて提示タイミングが判断されて、適切なタイミングで表示されることとなる。
【0057】
このようにして、第2実施形態に係る先行車両情報提示システム100によれば、第1実施形態と同様に、追従走行の失敗の頻度を低減することができる。また、追従走行の失敗の頻度を一層低減することができ、処理負荷の低減を図ることができる。
【0058】
さらに、第2実施形態によれば、後続車両201の現在地点において先行車両200が走行していた走行車線と後続車両201の現在の走行車線とが異なる場合に、提示タイミングを早めるべきと判断することとしている。ここで、走行車線が一致していないと適切に追従走行できなくなる可能性がある。例えば、走行車線が一致しない場合、後続車両201は適切に右折レーンや左折レーンに進入しておらず、右左折を失敗し追従走行できなくなる可能性がある。また、有料道路の料金所などにおいても、後続車両201は、先行車両200と同じ走行車線を走行していないと、分岐などで異なる方向に進んでしまい、追従できなくなる可能性がある。このため、走行車線が一致しない場合に提示タイミングを早めることで、後続車両201を早期に先行車両200と同じ車線に誘導して追従の失敗を減らすようにしている。従って、追従走行の失敗の頻度を一層低減することができる。
【0059】
次に、本発明の第3実施形態を説明する。第3実施形態に係る先行車両情報提示システム100は、第2実施形態のものと同様であるが、車載機の構成及び処理内容が第1実施形態のものと一部異なっている。
【0060】
以下、第2実施形態との相違点について説明する。図16は、第3実施形態に係る車載機3の構成図である。同図に示すように、第3実施形態に係る車載機3の車両情報取得部51は、信号機情報取得部51eを備えている。
【0061】
信号機情報取得部51eは、前方直近の信号機の状況(赤や青など)を検出するものであり、信号機又は交差点に設置されたDSRCやビーコンなどから信号機の情報を取得する構成となっている。
【0062】
また、信号機情報取得部51eを備えるため、車両情報補正部50は、後続車両201が次に通過する信号機に先行車両200が差し掛かったときには信号機が赤を示していたが後続車両201が差し掛かるときには青を示している場合、ウインカー情報220の提示タイミングを早めるべきと判断する。逆に、信号機情報取得部51eは、後続車両201が次に通過する信号機に先行車両200が差し掛かったときには信号機が青を示していたが後続車両201が差し掛かるときには赤を示している場合、ウインカー情報220の提示タイミングを遅らせるべきと判断する。
【0063】
ここで、先行車両200が信号機に差し掛かったときに赤を示していた場合、先行車両200は信号機の表示により減速することとなる。他方、後続車両201が信号機に差し掛かるときに青を示している場合、後続車両201は信号機の表示により減速しないこととなる。このため、ウインカー情報220をより早めに提示して減速を行わせなければ、先行車両200と同様の走行ができず、追従に失敗する可能性が生じてくる。従って、信号機の状態からウインカー情報220の提示タイミングを決定することで、信号機の状態に相違があっても、後続車両201に先行車両200と同様の走行を行わせ、追従走行の失敗を軽減するようにしている。
【0064】
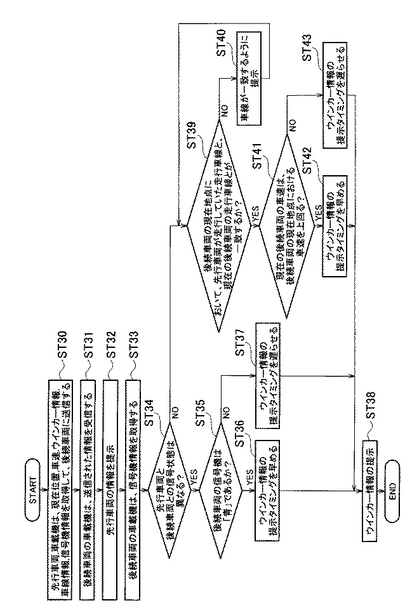
次に、第3実施形態に係る先行車両情報提示システム100の動作を説明する。図17は、第3実施形態に係る先行車両情報提示システム100の動作を示すフローチャートである。同図に示すように、先行車両情報提示システム100は、まず、先行車両200の車両情報取得部51が先行車両200の現在位置、車速、ウインカー情報、車線情報、及び信号機情報等を取得し、送受信部10がこれら情報を送信する(ST30)。次いで、後続車両201の送受信部10は、送信された現在位置、車速、ウインカー情報、車線情報、及び信号機情報等を受信する(ST31)。
【0065】
次に、後続車両201の表示部30は、先行車両200の情報を提示する(ST32)。図18は、図17のステップST32における情報提示の一例を示す説明図である。同図に示すように、後続車両201の表示部30は、例えば先行車両200が交差点210を右折しようとしている場合、先行車両200の走行状況情報(現在位置など)と共に、先行車両200のウインカー240を提示することとなる。また、表示部30は、先行車両200の信号機情報270を提示するようにしてもよい。
【0066】
再度、図18を参照する。先行車両200の情報を提示した後、後続車両201の車両情報取得部51は、次に差し掛かる信号機の情報を取得する(ST33)。次いで、車両情報補正部50は、後続車両201が次に通過する信号機に先行車両200が差し掛かったときの信号機の状態と、後続車両201が次に差し掛かる信号機の状態とが異なるか否かを判断する(ST34)。
【0067】
ここで、異なると判断した場合(ST34)、車両情報補正部50は、後続車両201が次に差し掛かる信号機の状態が青であるか否かを判断する(ST35)。後続車両201が次に差し掛かる信号機の状態が青であると判断した場合(ST35:YES)、車両情報補正部50は、ウインカー情報220の提示タイミングを早めるべきと判断する(ST36)。他方、後続車両201が次に差し掛かる信号機の状態が青でないと判断した場合と判断した場合(ST35:NO)、車両情報補正部50は、ウインカー情報220の提示タイミングを遅らせるべきと判断する(ST37)。
【0068】
そして、上記の如く、提示タイミングを判断した後(ST36,ST37の後)、表示部30は、判断された提示タイミングでウインカー情報220を提示することとなる(ST38)。その後、処理は終了し、車載機3の電源がオフされるまで、ステップST30〜ST43の処理が繰り返されることとなる。
【0069】
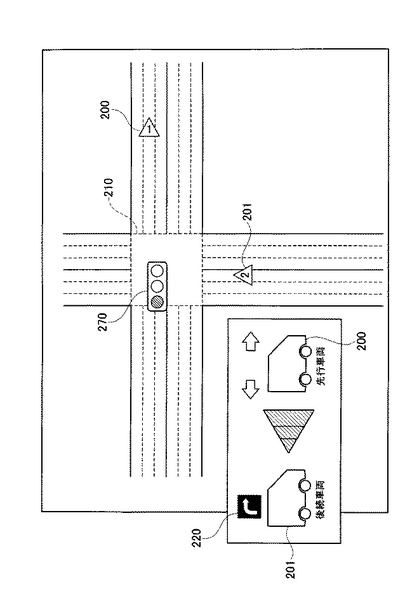
図19は、第3実施形態におけるウインカー情報220の提示の様子を示す説明図である。同図に示すように、表示部30は、右折を促すウインカー情報220を表示する。このとき、図19のフローチャートを参照して説明したように、提示タイミングは信号機の状況によって決定され、ウインカー情報220は適切なタイミングで表示されることとなる。これにより、適切なタイミングでウインカー情報220が表示され、追従走行の失敗の頻度を一層低減することができる。
【0070】
なお、ステップST34において「NO」と判断された場合、ステップST39〜ST43に示す処理が実行されるが、これらは図12に示したステップST23〜ST27に示す処理と同様であるため、説明を省略する。
【0071】
このようにして、第3実施形態に係る先行車両情報提示システム100によれば、第2実施形態と同様に、追従走行の失敗の頻度を低減することができる。(請求項1の効果)また、追従走行の失敗の頻度を一層低減することができ(請求項4,5,7〜10の効果)、処理負荷の低減を図ることができる。
【0072】
さらに、第3実施形態によれば、後続車両201が次に通過する信号機に先行車両200が差し掛かったときには信号機が赤を示していたが後続車両201が差し掛かるときには青を示している場合、ウインカー情報220の提示タイミングを早めるべきと判断することとしている。さらに、後続車両201が次に通過する信号機に先行車両200が差し掛かったときには信号機が青を示していたが後続車両201が差し掛かるときには赤を示している場合、ウインカー情報220の提示タイミングを遅らせるべきと判断することとしている。ここで、先行車両200が信号機に差し掛かったときに赤を示していた場合、先行車両200は信号機の表示により減速することとなる。他方、後続車両201が信号機に差し掛かるときに青を示している場合、後続車両201は信号機の表示により減速しないこととなる。このため、ウインカー情報220をより早めに提示して減速を行わせなければ、先行車両200と同様の走行ができず、追従に失敗する可能性が生じてくる。従って、信号機の状態からウインカー情報220の提示タイミングを決定することで、信号機の状態に相違があっても、後続車両201に先行車両200と同様の走行を行わせ、追従走行の失敗を軽減するようにしている。従って、追従走行の失敗の頻度を一層低減することができる。
【0073】
次に、本発明の第4実施形態を説明する。第4実施形態に係る先行車両情報提示システム100は、第3実施形態のものと同様であるが、車載機の構成及び処理内容が第1実施形態のものと一部異なっている。
【0074】
以下、第3実施形態との相違点について説明する。図20は、第4実施形態に係る車載機4の構成図である。同図に示すように、第4実施形態に係る車載機4の車両情報取得部51は、新たに、全幅や全高などの車両寸法や、最小回転半径などの車両の性能の情報を記憶した車両情報記憶部51fを備えている。
【0075】
また、車両情報記憶部51fを備えるため、車両情報補正部50は、後続車両201の最小回転半径が先行車両200の最小回転半径よりも大きい場合に、ウインカー情報220の提示タイミングを早めるべきと判断し、後続車両201の最小回転半径が先行車両200の最小回転半径以下である場合に、ウインカー情報220の提示タイミングを遅らせるべきと判断する。
【0076】
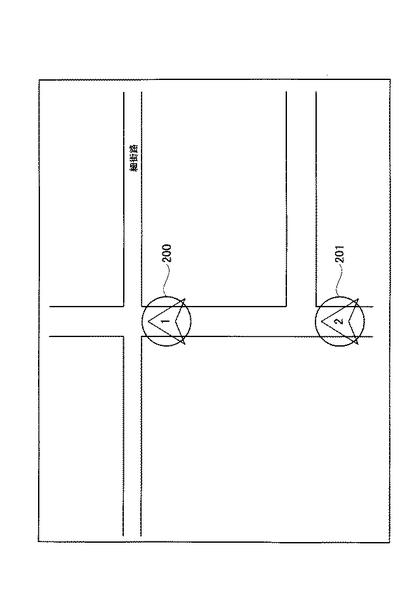
図21は、第4実施形態に係る先行車両情報提示システム100の動作を示す説明図である。同図に示すように、先行車両200が細街路を右折しようとしているものとする。ここで、後続車両201の最小回転半径が先行車両200の最小回転半径よりも大きい場合、後続車両201は先行車両200よりも右折に多くの距離を要してしまう。このため、後続車両201の最小回転半径の方が大きい場合、後続車両201が細街路を曲がりきれなくなる可能性がある。よって、車両情報補正部50は、ウインカー情報220の提示タイミングを早めるべきと判断する。
【0077】
他方、後続車両201の最小回転半径が先行車両200の最小回転半径以下である場合、後続車両201は右折に関して先行車両200と同等又は短い距離しか要しないといえる。このため、右折に若干の余裕があることとなり、車両情報補正部50はウインカー情報220の提示タイミングを遅らせるべきと判断している。すなわち、上記判断を行うことにより、ウインカー情報220の適切な提示が行うようにしている。
【0078】
このようにして、第4実施形態に係る先行車両情報提示システム100によれば、第3実施形態と同様に、追従走行の失敗の頻度を低減することができる。(請求項1の効果)また、追従走行の失敗の頻度を一層低減することができ(請求項4,5,7〜11の効果)、処理負荷の低減を図ることができる。
【0079】
さらに、第4実施形態によれば、後続車両201の最小回転半径が先行車両200の最小回転半径よりも大きい場合に、提示タイミングを早めるべきと判断し、後続車両201の最小回転半径が先行車両200の最小回転半径以下である場合に、提示タイミングを遅らせるべきと判断することとしている。ここで、後続車両201の最小回転半径が先行車両200の最小回転半径よりも大きい場合、後続車両201は先行車両200よりも右左折等に多くの距離を要してしまう。このため、後続車両201の最小回転半径の方が大きい場合、ウインカー情報220の提示タイミングを早めるべきと判断している。他方、後続車両201の最小回転半径が先行車両200の最小回転半径以下である場合、後続車両201は右左折等に関して先行車両200と同等又は短い距離しか要しないといえる。このため、右左折等に若干の余裕があることとなり、ウインカー情報220の提示タイミングを遅らせるべきと判断している。以上より、上記判断によってウインカー情報220の提示タイミングが適切となり、追従走行の失敗の頻度を一層低減することができる。
【0080】
次に、本発明の第5実施形態を説明する。第5実施形態に係る先行車両情報提示システム100は、第1実施形態のものと同様であるが、車載機の構成及び処理内容が第1実施形態のものと一部異なっている。
【0081】
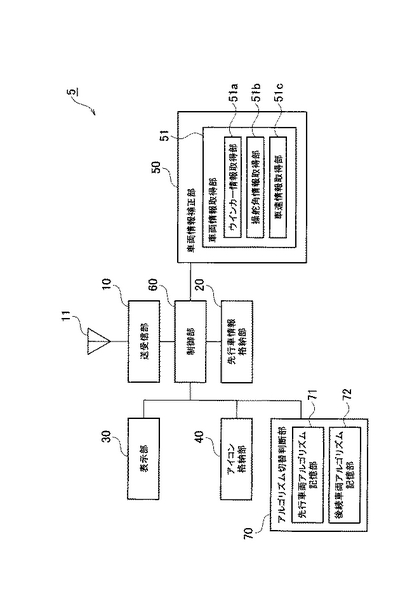
以下、第1実施形態との相違点について説明する。図22は、第5実施形態に係る車載機5の構成図である。同図に示すように、第5実施形態に係る車載機5は、新たに、アルゴリズム切替判断部70を備えている。アルゴリズム切替判断部70は、自車両が先行車両200であるか後続車両201であるかを判断して、表示内容を切替えたり、送受信する情報を切替えたりするものである。
【0082】
また、アルゴリズム切替判断部70は先行車両アルゴリズム記憶部71と後続車両アルゴリズム記憶部72を有している。先行車両アルゴリズム記憶部71は、自車両が先行車両200である場合に実行する処理アルゴリズムを記憶したものである。後続車両アルゴリズム記憶部72は、自車両が後続車両201である場合に実行する処理アルゴリズムを記憶したものである。
【0083】
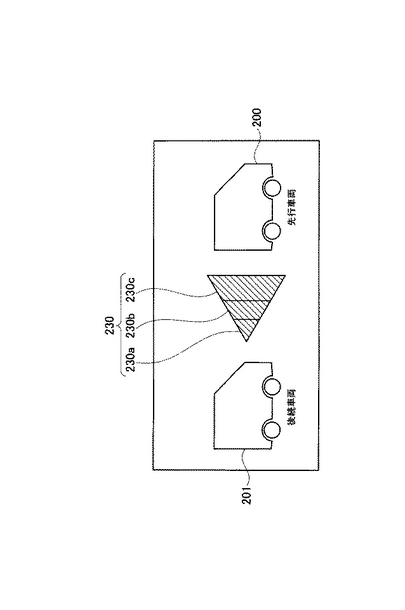
図23は、第5実施形態に係る先行車両情報提示システム100の動作を示す説明図である。自車両が先行車両200である場合、アルゴリズム切替判断部70は自車両が先行車両200であることを判断して、先行車両アルゴリズム記憶部71から先行車両200の処理アルゴリズムを読み込んで実行する。実行内容は、第1実施形態に示したものと同様である。
【0084】
また、先行車両200の処理アルゴリズムを実行する場合、表示部30は、図23に示すような表示を行う。すなわち、表示部30は、同図に示すように、自車両が先行車両200を示すべく、先行車両200のアイコンを太線にて表示する。
【0085】
他方、自車両が後続車両201である場合、アルゴリズム切替判断部70は自車両が後続車両201であることを判断して、後続車両アルゴリズム記憶部72から後続車両201の処理アルゴリズムを読み込んで実行する。実行内容は、第1実施形態に示したものと同様である。また、後続車両201の処理アルゴリズムを実行する場合、表示部30は、図23に示す表示例と異なり、後続車両201のアイコンを太線にて表示する。
【0086】
さらに、第5実施形態において表示部30は、先行車両200と後続車両201との間に両者の距離を示す情報230を表示する。具体的に第5実施形態では、先行車両200と後続車両201との距離を3段階で表示する。近くにいる場合(例えば80m以内の場合)、第1矢印部230aのみを点灯等させる。少し離れた場合(例えば80mを越えて120m以内の場合)、第1矢印部230a及び第2矢印部230bを点灯等させる。
【0087】
次いで、追従できなくなるくらい離れた場合(例えば120mを越える場合)、第1〜第3矢印部230a〜230cのすべてを点灯等させる。これにより、先行車両200の運転者は速度を調整したり、停車して後続車両201を待ったりすることができる。
【0088】
このようにして、第5実施形態に係る先行車両情報提示システム100によれば、第1実施形態と同様に、第1実施形態と同様に、追従走行の失敗の頻度を低減することができる。また、追従走行の失敗の頻度を一層低減することができ、処理負荷の低減を図ることができる。
【0089】
さらに、第5実施形態によれば、自車両が先行車両200であるか後続車両201であるかを判断して、自車両が先行車両200である場合には先行車両200の処理アルゴリズムを実行し、自車両が後続車両201である場合には後続車両201の処理アルゴリズムを実行することとしている。このため、自車両が先行車両200としてグループ走行するとき及び自車両が後続車両201としてグループ走行するときの双方において、追従走行の失敗が軽減された先行車両情報提示システム100を実現することができる。
【0090】
以上、実施形態に基づき本発明を説明したが、本発明は上記実施形態に限られるものではなく、本発明の趣旨を逸脱しない範囲で、変更を加えてもよいし、各実施形態を組み合わせるようにしてもよい。
【0091】
例えば、先行車両200の車両情報取得部51は、先行車両200の走行状況情報として、先行車両200が走行した道路の形状の情報を取得する。そして、後続車両201の車両情報補正部50は、前記道路の形状に応じて減速の必要性を判断し、判断した減速の必要性が高まるに従って前記ウインカー情報の提示タイミングを早めるべきと判断し、判断した減速の必要性が低くなるに従って前記ウインカー情報の提示タイミングを遅らせるべきと判断するようにしてもよい。
【0092】
ここで、十字路などでは充分に減速したうえで右左折を行わなければ、速度が高い場合には十字路を曲がりきれないこととなってしまう。このため、先行車両200が十字路を右左折した場合において、後続車両201が充分に速度を低下させずに十字路に差し掛かってしまった場合、後続車両201の運転者は十字路を直進してしまい、追従走行に失敗する可能性がでてきてしまう。よって、十字路など減速の必要性が高まるに従ってウインカー情報220の提示タイミングを早め、減速を促すべきである。
【0093】
逆に、Y字路では十字路に比べると比較的に減速せずにY字路を曲がりきることができる。よって、Y字路など減速の必要性が低くなるに従ってウインカー情報220の提示タイミングを遅くするようにしてもよい。
【0094】
このように、道路の形状に応じてウインカー情報220の提示タイミングを変更することによっても、追従走行の失敗の頻度を一層低減することができる。
【図面の簡単な説明】
【0095】
【図1】先行車両のウインカー操作の情報及びその提示タイミングを示す従来技術の説明図である。
【図2】本発明の第1実施形態に係る先行車両情報提示システムの構成図である。
【図3】図2に示した車載機1の詳細構成図である。
【図4】表示部30による地図表示の一例を示す説明図である。
【図5】表示部30による簡易表示の一例を示す説明図である。
【図6】第1実施形態に係る先行車両情報提示システム100の詳細な動作を示すフローチャートである。
【図7】図6のステップST12における情報提示の一例を示す説明図である。
【図8】ウインカー情報220の提示の様子を示す説明図である。
【図9】ブレーキを踏む旨の情報提示の一例を示す説明図である。
【図10】シフトダウンする旨の情報提示の一例を示す説明図である。
【図11】第2実施形態に係る車載機2の構成図である。
【図12】第2実施形態に係る先行車両情報提示システム100の動作を示すフローチャートである。
【図13】図12のステップST22における情報提示の一例を示す説明図である。
【図14】第2実施形態におけるウインカー情報220の提示の様子を示す第1の説明図である。
【図15】第2実施形態におけるウインカー情報220の提示の様子を示す第2の説明図である。
【図16】第3実施形態に係る車載機3の構成図である。
【図17】第3実施形態に係る先行車両情報提示システム100の動作を示すフローチャートである。
【図18】図17のステップST32における情報提示の一例を示す説明図である。
【図19】第3実施形態におけるウインカー情報220の提示の様子を示す説明図である。
【図20】第4実施形態に係る車載機4の構成図である。
【図21】第4実施形態に係る先行車両情報提示システム100の動作を示す説明図である。
【図22】第5実施形態に係る車載機5の構成図である。
【図23】第5実施形態に係る先行車両情報提示システム100の動作を示す説明図である。
【符号の説明】
【0096】
1〜5…車載機
10…送受信部(送信手段、受信手段)
11…アンテナ
20…先行車情報格納部
30…表示部(提示手段)
40…アイコン格納部
50…車両情報補正部(タイミング補正手段)
51…車両情報取得部(先行車両情報取得手段、後続車両車両情報取得手段)
51a…ウインカー情報取得部
51b…操舵角情報取得部
51c…車速情報取得部
51d…車線情報取得部
51e…信号機情報取得部
51f…車両情報記憶部
60…制御部
70…アルゴリズム切替判断部
71…先行車両アルゴリズム記憶部
72…後続車両アルゴリズム記憶部
100…先行車両情報提示システム
200…先行車両
201…後続車両
220…ウインカー情報
【技術分野】
【0001】
本発明は、先行車両情報提示システムに関する。
【背景技術】
【0002】
従来、先行車両と後続車両とが同じ目的地等を目指してグループ走行することが行われている。また、グループ走行を円滑に行うために、先行車両の運転者が目的地を入力し目的地までの推奨経路が算出されると、推奨経路の情報を後続車両に送信するナビゲーション装置が知られている(例えば特許文献1参照)。
【特許文献1】特開2001−317953号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来装置では、後続車両が推奨経路の通りに走行できなくなる場合が少なからずあった。
【0004】
本発明はこのような従来の課題を解決するためになされたものであり、その目的とするところは、追従走行の失敗の頻度を低減することができる先行車両情報提示システムを提供することにある。
【課題を解決するための手段】
【0005】
本発明の先行車両情報提示システムは、先行車両と先行車両に追従して走行する後続車両との間で無線通信を行い、先行車両のウインカー操作の情報を運転者に提示するものである。この先行車両情報提示システムは、先行車両と後続車両とにそれぞれ搭載される車載機を備えている。先行車両の車載機は、先行車両のウインカー操作の情報を取得する先行車両情報取得手段と、先行車両情報取得手段により取得された先行車両のウインカー情報を無線送信する送信手段とを有している。一方、後続車両の車載機は、送信手段により無線送信されたウインカー情報を受信する受信手段と、受信手段により受信されたウインカー情報を後続車両の運転者に提示する提示手段と、先行車両及び後続車両の少なくとも一方の走行状況から、ウインカー情報の提示タイミングを早めるべきか遅らせるべきかを判断し、判断したタイミングで提示手段にウインカー情報を提示させるタイミング補正手段とを有している。
【発明の効果】
【0006】
本発明によれば、先行車両及び後続車両の少なくとも一方の走行状況から、ウインカー情報の提示タイミングを早めるべきか遅らせるべきかを判断し、判断したタイミングでウインカー情報を提示させることとしている。このため、先行車両及び後続車両の少なくとも一方の走行状況に応じて適切なタイミングでウインカー情報が提示されることとなり、追従走行の失敗の頻度を低減することができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の好適な実施形態を図面に基づいて説明する。なお、各図において、同一又は同様の要素には同一の符号を付して説明を省略するものとする。
【0008】
まず、先行車両情報提示システムについて説明するに先立って、本願発明者らが本願発明を創作するに至った経緯を説明する。図1は、先行車両のウインカー操作の情報及びその提示タイミングを示す従来技術の説明図である。同図に示すように、先行車両200に後続車両201が追従している場合、先行車両200が交差点210で右折したとする。このとき、右折時のウインカー操作の情報が先行車両200から後続車両201に送信され、後続車両201では、運転者に右折を促すべくウインカー情報220が提示される。
【0009】
しかし、交差点210よりも手前に存在する別の交差点211に後続車両201が差し掛かる前にウインカー情報220が提示されると、後続車両201の運転者は別の交差点211にて右折するものと勘違いし、先行車両200に追従できなくなる可能性がある。特に、後続車両201において詳細地図等を表示することができず、簡易的にしかウインカー情報220を提示できない場合には、上記の勘違いが生じやすく、後続車両201が先行車両200に追従できなくなる可能性は一層高まる。
【0010】
このような事情のもと、本願発明者らは、以下の実施形態に係る先行車両情報提示システムを創作するに至り、追従走行の失敗の頻度を低減することとした。以下、実施形態に係る先行車両情報提示システムを説明する。
【0011】
なお、上記したウインカー情報220とはウインカー操作を促す情報であり、図1に示したように右折を促す右折マークはもちろんのこと車線変更や左折など促す情報について含まれるものである。
【0012】
図2は、本発明の第1実施形態に係る先行車両情報提示システムの構成図である。同図に示すように、先行車両情報提示システム100は、先行車両200と先行車両200に追従して走行する後続車両201との間で無線通信を行い、先行車両200のウインカー操作の情報を後続車両201の運転者に提示するものである。この先行車両情報提示システム100は、先行車両200と後続車両201とにそれぞれ搭載される車載機1からなっており、これらの車載機1がそれぞれ無線通信する構成となっている。
【0013】
図3は、図2に示した車載機1の詳細構成図である。同図に示すように、車載機1は、送受信部(送信手段、受信手段)10と、先行車情報格納部20と、表示部(提示手段)30と、アイコン格納部40と、車両情報補正部(タイミング補正手段)50と、制御部60とを備えている。
【0014】
送受信部10は、他の車載機1と無線通信するものであり、アンテナ11を介して情報を送受信する構成となっている。また、送受信部10は狭域無線通信を行うものであり、具体的には無線LAN(IEEE802.11bやIEEE802.11g等の無線によるLANを指す)による通信や、ETC通信やDSRC通信などを行うものである。また送受信部10は、携帯電話やPHSなどの広域無線通信を行う構成であってもよい。
【0015】
先行車情報格納部20は、先行車両200から送られてきたウインカー情報等を記憶しておくものである。表示部30は、先行車両200のウインカー情報を運転者に提示するためのものであり、望ましくは先行車両200と後続車両201とを含んだ状態で地図表示できる機能を備えるものである。
【0016】
図4は、表示部30による地図表示の一例を示す説明図である。同図に示すように、先行車両200が交差点210において右折した場合、後続車両201が交差点210に差し掛かると、表示部30は、右折マークにて右折を促すウインカー情報220や、先行車両200の軌跡を示すことにより右折を促すウインカー情報220を表示する。
【0017】
図5は、表示部30による簡易表示の一例を示す説明図である。表示部30は、簡易表示するとき、図5のような画像を表示する。同図に示すように、表示部30は、先行車両200と後続車両201とを示すアイコンを表示している。また、表示部30は、先行車両200と後続車両201との間に、両者の距離又はスループットを示す情報230を表示している。さらに、後続車両201のアイコン上部にウインカー情報220を表示し、先行車両200のアイコン上部には先行車両200のウインカー情報240などを表示する。
【0018】
再度、図3を参照する。アイコン格納部40は、先行車両200をアイコン表示するときに必要とされるアイコンの画像を記憶したものであり、具体的には図4及び図5に示すようなアイコンを記憶している。車両情報補正部50は、後続車両201の運転者にウインカー情報220を提示するタイミングを、適切なタイミングに補正するものである。制御部60は、車載機1の全体を制御するものであり、CPUなどによって構成され、上記各部10〜50それぞれに接続されている。
【0019】
また、上記車両情報補正部50は、車両情報取得部(先行車両情報取得手段、後続車両車両情報取得手段)51を備えている。車両情報取得部51は、ナビゲーションシステムなどに接続され、現在位置や走行中の道路の形状など、種々の情報を取得する構成となっている。また、車両情報取得部51は、車両運転者のウインカーの操作状況を示す情報を取得するウインカー情報取得部51a、ハンドルの操舵角の情報を取得する操舵角情報取得部51b、及び車両の速度の情報を取得する車速情報取得部51cを有している。さらに、車両情報取得部51は取得した情報を車両情報補正部50に与える構成となっている。また、車両情報補正部50は、車両情報取得部51からの情報に基づいて、ウインカー情報220を提示するタイミングを早めるべきか遅らせるべきかを判断するようになっている。
【0020】
このような先行車両情報提示システム100によれば、まず、先行車両200の車載機1が動作する。そして、車両情報取得部51がウインカー情報取得部51aからウインカー情報を取得する。
【0021】
また、車両情報取得部51は、ウインカー情報220に加えて、先行車両200の走行状況の情報を、操舵角情報取得部51b、車速情報取得部51c及びナビゲーションシステム(図示せず)などから取得する。ここで、走行状況情報とは、自車両の状態(例えば車速やエンジン回転数)を示す情報や、走行時における環境(例えば天候や走行道路の形状)を示す情報などをいう。
【0022】
その後、送受信部10は、車両情報取得部51により取得された先行車両200のウインカー情報220及び走行状況情報を送信する。そして、後続車両201の車載機1の送受信部10が先行車両200のウインカー情報220及び走行状況情報とを受信する。
【0023】
次いで、後続車両201の車両情報取得部51は、後続車両201の走行状況の情報を取得する。そして、車両情報補正部50は、車両情報取得部51により取得された後続車両201の走行状況の情報と、送受信部10により受信された先行車両200の走行状況の情報とを読み込む。
【0024】
その後、表示部30は、送受信部10により受信されたウインカー情報220を後続車両201の運転者に提示する。この際、車両情報補正部50は、先行車両200及び後続車両201の少なくとも一方の走行状況から、ウインカー情報220の提示タイミングを早めるべきか遅らせるべきかを判断し、判断したタイミングで表示部30にウインカー情報を提示させる。
【0025】
これにより、例えば、先行車両200が交差点を右折するときには周囲の車両が少なく車線変更等がスムーズであったが、後続車両201が交差点を右折しようとするときには周囲の車両が多く車線変更等がスムーズでない場合などに、ウインカー情報220の提示タイミングを早めるなどして、追従走行の失敗の頻度を低減することができる。
【0026】
なお、車両情報補正部50は、先行車両200及び後続車両201の少なくとも一方の走行状況から、ウインカー情報の提示タイミングを判断しているが、望ましくは先行車両200の走行状況の情報から、ウインカー情報の提示タイミングを判断するとよい。また、より望ましくは、先行車両200及び後続車両201の走行状況の情報から、ウインカー情報の提示タイミングを判断するとよい。
【0027】
次に、第1実施形態に係る先行車両情報提示システム100の詳細な動作を説明する。図6は、第1実施形態に係る先行車両情報提示システム100の詳細な動作を示すフローチャートである。
【0028】
同図に示すように、先行車両情報提示システム100は、まず、先行車両200の車両情報取得部51が先行車両200の現在位置、車速及びウインカー情報等を取得し、これら情報を送受信部10が送信する(ST10)。すなわち、先行車両200の車載機1は、ウインカー情報220と走行状況情報とを送信する。
【0029】
次いで、後続車両201の送受信部10は、送信された現在位置、車速及びウインカー情報等を受信する(ST11)。すなわち、後続車両201の車載機1は、ウインカー情報220と先行車両200の走行状況情報とを受信する。
【0030】
次に、後続車両201の表示部30は、先行車両200の情報を提示する(ST12)。図7は、図6のステップST12における情報提示の一例を示す説明図である。同図に示すように、後続車両201の表示部30は、例えば先行車両200が交差点210を右折しようとしている場合、先行車両200の走行状況情報(現在位置など)と共に、先行車両200のウインカー240を提示することとなる。
【0031】
再度、図6を参照する。先行車両200の情報を提示した後、後続車両201の車両情報補正部50は、現在の後続車両201の車速が後続車両201の現在地点における車速を上回るか否かを判断する(ST13)。そして、現在の後続車両201の車速が後続車両201の現在地点における車速を上回ると判断した場合(ST13:YES)、車両情報補正部50は、ウインカー情報220の提示タイミングを早めるべきと判断する(ST14)。ここで、後続車両201の車速が先行車両200の車速を上回る場合、後続車両201は先行車両200よりもブレーキング等を早期に行わなければならない。このため、車両情報補正部50は、後続車両201の車速が先行車両200の車速を上回る場合、減速を促すべくウインカー情報220の提示タイミングを早めるべきと判断する。
【0032】
他方、現在の後続車両201の車速が後続車両201の現在地点における車速を上回らないと判断した場合(ST13:NO)、車両情報補正部50は、ウインカー情報220の提示タイミングを遅らせるべきと判断する(ST15)。ここで、後続車両201の車速が先行車両200の車速以下である場合、後続車両201は先行車両200よりもブレーキング等に若干の余裕があることとなる。このため、後続車両201の車速が先行車両200の車速以下である場合、車両情報補正部50は、ウインカー情報220の提示タイミングを遅らせるべきと判断する。
【0033】
そして、上記の如く、提示タイミングを判断した後(ST14,ST15の後)、表示部30は、判断された提示タイミングでウインカー情報220を提示することとなる(ST16)。その後、処理は終了し、車載機1の電源がオフされるまで、上記の処理が繰り返されることとなる。
【0034】
図8は、ウインカー情報220の提示の様子を示す説明図である。同図に示すように、後続車両201の表示部30は、例えば後続車両201に右折を促すウインカー情報220を表示する。このとき、図6のフローチャートを参照して説明したように、提示タイミングは車両情報補正部50により判断されて、適切なタイミングで表示されることとなる。また、ウインカー情報220が適切なタイミングで表示されるため、後続車両201の運転者による右折の失敗の頻度が少なくなって、追従走行の失敗の頻度を一層低減することができる。
【0035】
ここで、現在の後続車両201の車速が後続車両201の現在地点における先行車両200の車速を上回る場合、表示部30は、ブレーキを踏む旨、及びシフトダウンする旨の少なくとも一方の情報をウインカー情報220に先だって提示するようにしてもよい。
【0036】
図9は、ブレーキを踏む旨の情報提示の一例を示す説明図であり、図10は、シフトダウンする旨の情報提示の一例を示す説明図である。まず、図9に示すように、表示部30は、ウインカー情報220に先だってブレーキを踏む旨の情報250を提示することとしている。このため、右左折などにあたり、早期の減速が必要な場合に減速を的確に指示することとなる。
【0037】
また、図10に示すようにウインカー情報220に先だってシフトダウンする旨の情報260を提示することによっても、同様に減速を的確に指示することとなる。これにより、追従走行を行いやすくなり、追従走行の失敗の頻度を一層低減することができる。
【0038】
このようにして、第1実施形態に係る先行車両情報提示システム100によれば、先行車両200及び後続車両201の少なくとも一方の走行状況から、ウインカー情報220の提示タイミングを早めるべきか遅らせるべきかを判断し、判断したタイミングでウインカー情報220を提示させることとしている。このため、先行車両200及び後続車両201の少なくとも一方の走行状況に応じて適切なタイミングでウインカー情報220が提示されることとなり、追従走行の失敗の頻度を低減することができる。
【0039】
また、先行車両200の走行状況情報から、ウインカー情報220の提示タイミングを早めるべきか遅らせるべきかを判断することとしている。このため、後続車両201よりも先に走行して得られた実際の状況によってウインカー情報220の提示タイミングが決定されることとなる。これにより、新しく道路ができた場合や、道路工事や渋滞が存在する場合などにおいても、実際に状況に応じて提示タイミングが決定されることとなり、後続車両201にはより適切なタイミングでウインカー情報220が提示されることとなる。従って、追従走行の失敗の頻度を一層低減することができる。
【0040】
また、先行車両200の走行状況情報に加えて後続車両201の走行状況情報から、ウインカー情報220の提示タイミングを早めるべきか遅らせるべきかを判断することとしている。このため、先行車両200と後続車両201との走行において一致する点や相違する点など、両者の違いに応じてウインカー情報220の提示タイミングが決定されることとなり、提示タイミングを一層適切とすることが可能となる。従って、追従走行の失敗の頻度を一層低減することができる。
【0041】
また、現在の後続車両201の車速が後続車両201の現在地点における先行車両200の車速を上回る場合に、提示タイミングを早めるべきと判断し、現在の後続車両201の車速が後続車両201の現在地点における先行車両200の車速以下である場合に、提示タイミングを遅らせるべきと判断することとしている。ここで、後続車両201の車速が先行車両200の車速を上回る場合、後続車両201は先行車両200よりもブレーキング等を早期に行わなければならない。このため、後続車両201の車速が先行車両200の車速を上回る場合、早期の減速を促すべくウインカー情報220の提示タイミングを早めるべきと判断している。一方、後続車両201の車速が先行車両200の車速以下である場合、後続車両201は先行車両200よりもブレーキング等に若干の余裕があることとなる。このため、後続車両201の車速が先行車両200の車速以下である場合、ウインカー情報220の提示タイミングを遅らせるべきと判断している。このように、先行車両200と後続車両201との車速との関係において、ウインカー情報220が適切なタイミングで提示されることとなる。従って、追従走行の失敗の頻度を一層低減することができる。
【0042】
また、後続車両201の車速が先行車両200の車速を超える場合、ブレーキを踏む旨、及びシフトダウンする旨の少なくとも一方の情報250,260をウインカー情報220に先だって提示することとしている。このため、早期の減速が必要な場合に減速を的確に指示することとなり、後続車両201の運転者は追従走行を行いやすくなる。従って、追従走行の失敗の頻度を一層低減することができる。
【0043】
なお、第1実施形態において、図6に示すフローチャートのように、ウインカー情報220の提示タイミングを早めるべきか遅らせるべきかの判断は、常時繰り返して行われているが、常時行う構成に限らず、例えば後続車両201の追従走行が乱れると予測される場合に判断する構成としてもよい。具体的には、先行車両200が右左折した場合、先行車両200が車線変更した場合、及び先行車両200が有料道路の料金所を通過する場合の少なくとも1つに該当するときに、ウインカー情報220の提示タイミングを判断するようにしてもよい。これにより、道路を直進していれば先行車両に追従できる場合など、提示タイミングの変更が不要なときに提示タイミングの変更処理を実行することがなく、処理負荷の低減を図ることができる。
【0044】
また、先行車両200の車両情報取得部51は、先行車両200の走行状況情報としてウインカー操作した時点における先行車両200から交差点までの距離の情報を取得し、車両情報補正部50は、この距離が長くなるに従ってウインカー情報220の提示タイミングを早めるべきと判断し、この距離が短くなるに従ってウインカー情報220の提示タイミングを遅らせるべきと判断するようにしてよい。ここで、ウインカー操作した時点における先行車両200から交差点までの距離とは、先行車両200の運転者が交差点を右左折等するのに必要であると判断した距離とも言える。このため、この距離が長い場合には、交差点の右左折等にあたり準備等の時間が長く必要であるといえる。一方、距離が短い場合には、交差点の右左折等にあたり準備等の時間があまり必要がないといえる。従って、ウインカー操作した時点における先行車両200から交差点までの距離に応じて、提示タイミングを判断することで、適切な提示タイミングにてウインカー情報220が提示されることとなり、追従走行の失敗の頻度を一層低減することができる。
【0045】
次に、本発明の第2実施形態を説明する。第2実施形態に係る先行車両情報提示システム100は、第1実施形態のものと同様であるが、車載機の構成及び処理内容が第1実施形態のものと一部異なっている。
【0046】
以下、第1実施形態との相違点について説明する。図11は、第2実施形態に係る車載機2の構成図である。同図に示すように、第2実施形態に係る車載機2の車両情報取得部51は、車線情報取得部51dを備えている。
【0047】
車線情報取得部51dは、現在走行している道路の車線情報を検出して取得するものである。この車線情報取得部51dは、例えば、カーナビゲーションの測位手段と車線情報を含んだ道路地図データとから走行車線の情報を取得する構成となっている。また、車線情報取得部51dは、道路脇に設置されたDSRCやビーコンなどから走行車線を取得する構成であってもよい。
【0048】
また、車線情報取得部51dを備えるため、車両情報補正部50は、後続車両201の現在地点において先行車両200が走行していた走行車線と後続車両201の現在の走行車線とが異なる場合に、ウインカー情報220の提示タイミングを早めるべきと判断する。
【0049】
ここで、走行車線が一致していないと適切に追従走行できなくなる可能性がある。例えば、走行車線が一致しない場合、後続車両201は適切に右折レーンや左折レーンに進入しておらず、右左折を失敗し追従走行できなくなる可能性がある。また、有料道路の料金所などにおいても、後続車両201は、先行車両200と同じ走行車線を走行していないと、分岐などで異なる方向に進んでしまい、追従できなくなる可能性がある。このため、走行車線が一致しない場合に提示タイミングを早めることで、後続車両201を早期に先行車両200と同じ車線に誘導して追従の失敗を減らすようにしている。
【0050】
次に、第2実施形態に係る先行車両情報提示システム100の動作を説明する。図12は、第2実施形態に係る先行車両情報提示システム100の動作を示すフローチャートである。同図に示すように、先行車両情報提示システム100は、まず、先行車両200の車両情報取得部51が先行車両200の現在位置、車速、ウインカー情報、及び車線情報等を取得し、送受信部10がこれら情報を送信する(ST20)。次いで、後続車両201の送受信部10は、送信された現在位置、車速、ウインカー情報、及び車線情報等を受信する(ST21)。
【0051】
次に、後続車両201の表示部30は、先行車両200の情報を提示する(ST22)。図13は、図12のステップST22における情報提示の一例を示す説明図である。同図に示すように、後続車両201の表示部30は、例えば先行車両200が交差点210を右折しようとしている場合、先行車両200の走行状況情報(現在位置など)と共に、先行車両200のウインカー240を提示することとなる。
【0052】
再度、図12を参照する。先行車両200の情報を提示した後、後続車両201の車両情報補正部50は、後続車両201の現在地点において先行車両200が走行していた走行車線と後続車両201の現在の走行車線とが一致するか否かを判断する(ST23)。ここで、一致しないと判断した場合(ST23:NO)、車両情報補正部50は、ウインカー情報220の提示タイミングを早めるべきと判断する。そして、表示部30は、車線が位置するようにウインカー情報220を提示する(ST24)。このとき、表示部30は、待機時間等を設けず、即座にウインカー情報220を提示する。すなわち、提示タイミングを早めて提示することとなる。
【0053】
図14は、第2実施形態におけるウインカー情報220の提示の様子を示す第1の説明図である。同図に示すように、表示部30は、ウインカー情報220を表示することにより、車線変更を促している。
【0054】
再度、図12を参照する。車線変更を表すウインカー情報220を提示した後、処理はステップST23に戻る。そして、再度車線の一致が判断されることとなる。
【0055】
一方、先行車両200が走行していた走行車線と後続車両201の現在の走行車線とが一致すると判断した場合(ST23:YES)、処理はステップST25に移行する。そして、ステップST25〜ST28において、図6に示したステップST13〜ST16に示す処理と同様の処理が実行される。
【0056】
また、ステップST28において図15に示す提示が行われる。図15は、第2実施形態におけるウインカー情報220の提示の様子を示す第2の説明図である。同図に示すように、後続車両201の表示部30は、右折を促すウインカー情報220を表示する。このとき、図12のフローチャートに示すように、車速に応じて提示タイミングが判断されて、適切なタイミングで表示されることとなる。
【0057】
このようにして、第2実施形態に係る先行車両情報提示システム100によれば、第1実施形態と同様に、追従走行の失敗の頻度を低減することができる。また、追従走行の失敗の頻度を一層低減することができ、処理負荷の低減を図ることができる。
【0058】
さらに、第2実施形態によれば、後続車両201の現在地点において先行車両200が走行していた走行車線と後続車両201の現在の走行車線とが異なる場合に、提示タイミングを早めるべきと判断することとしている。ここで、走行車線が一致していないと適切に追従走行できなくなる可能性がある。例えば、走行車線が一致しない場合、後続車両201は適切に右折レーンや左折レーンに進入しておらず、右左折を失敗し追従走行できなくなる可能性がある。また、有料道路の料金所などにおいても、後続車両201は、先行車両200と同じ走行車線を走行していないと、分岐などで異なる方向に進んでしまい、追従できなくなる可能性がある。このため、走行車線が一致しない場合に提示タイミングを早めることで、後続車両201を早期に先行車両200と同じ車線に誘導して追従の失敗を減らすようにしている。従って、追従走行の失敗の頻度を一層低減することができる。
【0059】
次に、本発明の第3実施形態を説明する。第3実施形態に係る先行車両情報提示システム100は、第2実施形態のものと同様であるが、車載機の構成及び処理内容が第1実施形態のものと一部異なっている。
【0060】
以下、第2実施形態との相違点について説明する。図16は、第3実施形態に係る車載機3の構成図である。同図に示すように、第3実施形態に係る車載機3の車両情報取得部51は、信号機情報取得部51eを備えている。
【0061】
信号機情報取得部51eは、前方直近の信号機の状況(赤や青など)を検出するものであり、信号機又は交差点に設置されたDSRCやビーコンなどから信号機の情報を取得する構成となっている。
【0062】
また、信号機情報取得部51eを備えるため、車両情報補正部50は、後続車両201が次に通過する信号機に先行車両200が差し掛かったときには信号機が赤を示していたが後続車両201が差し掛かるときには青を示している場合、ウインカー情報220の提示タイミングを早めるべきと判断する。逆に、信号機情報取得部51eは、後続車両201が次に通過する信号機に先行車両200が差し掛かったときには信号機が青を示していたが後続車両201が差し掛かるときには赤を示している場合、ウインカー情報220の提示タイミングを遅らせるべきと判断する。
【0063】
ここで、先行車両200が信号機に差し掛かったときに赤を示していた場合、先行車両200は信号機の表示により減速することとなる。他方、後続車両201が信号機に差し掛かるときに青を示している場合、後続車両201は信号機の表示により減速しないこととなる。このため、ウインカー情報220をより早めに提示して減速を行わせなければ、先行車両200と同様の走行ができず、追従に失敗する可能性が生じてくる。従って、信号機の状態からウインカー情報220の提示タイミングを決定することで、信号機の状態に相違があっても、後続車両201に先行車両200と同様の走行を行わせ、追従走行の失敗を軽減するようにしている。
【0064】
次に、第3実施形態に係る先行車両情報提示システム100の動作を説明する。図17は、第3実施形態に係る先行車両情報提示システム100の動作を示すフローチャートである。同図に示すように、先行車両情報提示システム100は、まず、先行車両200の車両情報取得部51が先行車両200の現在位置、車速、ウインカー情報、車線情報、及び信号機情報等を取得し、送受信部10がこれら情報を送信する(ST30)。次いで、後続車両201の送受信部10は、送信された現在位置、車速、ウインカー情報、車線情報、及び信号機情報等を受信する(ST31)。
【0065】
次に、後続車両201の表示部30は、先行車両200の情報を提示する(ST32)。図18は、図17のステップST32における情報提示の一例を示す説明図である。同図に示すように、後続車両201の表示部30は、例えば先行車両200が交差点210を右折しようとしている場合、先行車両200の走行状況情報(現在位置など)と共に、先行車両200のウインカー240を提示することとなる。また、表示部30は、先行車両200の信号機情報270を提示するようにしてもよい。
【0066】
再度、図18を参照する。先行車両200の情報を提示した後、後続車両201の車両情報取得部51は、次に差し掛かる信号機の情報を取得する(ST33)。次いで、車両情報補正部50は、後続車両201が次に通過する信号機に先行車両200が差し掛かったときの信号機の状態と、後続車両201が次に差し掛かる信号機の状態とが異なるか否かを判断する(ST34)。
【0067】
ここで、異なると判断した場合(ST34)、車両情報補正部50は、後続車両201が次に差し掛かる信号機の状態が青であるか否かを判断する(ST35)。後続車両201が次に差し掛かる信号機の状態が青であると判断した場合(ST35:YES)、車両情報補正部50は、ウインカー情報220の提示タイミングを早めるべきと判断する(ST36)。他方、後続車両201が次に差し掛かる信号機の状態が青でないと判断した場合と判断した場合(ST35:NO)、車両情報補正部50は、ウインカー情報220の提示タイミングを遅らせるべきと判断する(ST37)。
【0068】
そして、上記の如く、提示タイミングを判断した後(ST36,ST37の後)、表示部30は、判断された提示タイミングでウインカー情報220を提示することとなる(ST38)。その後、処理は終了し、車載機3の電源がオフされるまで、ステップST30〜ST43の処理が繰り返されることとなる。
【0069】
図19は、第3実施形態におけるウインカー情報220の提示の様子を示す説明図である。同図に示すように、表示部30は、右折を促すウインカー情報220を表示する。このとき、図19のフローチャートを参照して説明したように、提示タイミングは信号機の状況によって決定され、ウインカー情報220は適切なタイミングで表示されることとなる。これにより、適切なタイミングでウインカー情報220が表示され、追従走行の失敗の頻度を一層低減することができる。
【0070】
なお、ステップST34において「NO」と判断された場合、ステップST39〜ST43に示す処理が実行されるが、これらは図12に示したステップST23〜ST27に示す処理と同様であるため、説明を省略する。
【0071】
このようにして、第3実施形態に係る先行車両情報提示システム100によれば、第2実施形態と同様に、追従走行の失敗の頻度を低減することができる。(請求項1の効果)また、追従走行の失敗の頻度を一層低減することができ(請求項4,5,7〜10の効果)、処理負荷の低減を図ることができる。
【0072】
さらに、第3実施形態によれば、後続車両201が次に通過する信号機に先行車両200が差し掛かったときには信号機が赤を示していたが後続車両201が差し掛かるときには青を示している場合、ウインカー情報220の提示タイミングを早めるべきと判断することとしている。さらに、後続車両201が次に通過する信号機に先行車両200が差し掛かったときには信号機が青を示していたが後続車両201が差し掛かるときには赤を示している場合、ウインカー情報220の提示タイミングを遅らせるべきと判断することとしている。ここで、先行車両200が信号機に差し掛かったときに赤を示していた場合、先行車両200は信号機の表示により減速することとなる。他方、後続車両201が信号機に差し掛かるときに青を示している場合、後続車両201は信号機の表示により減速しないこととなる。このため、ウインカー情報220をより早めに提示して減速を行わせなければ、先行車両200と同様の走行ができず、追従に失敗する可能性が生じてくる。従って、信号機の状態からウインカー情報220の提示タイミングを決定することで、信号機の状態に相違があっても、後続車両201に先行車両200と同様の走行を行わせ、追従走行の失敗を軽減するようにしている。従って、追従走行の失敗の頻度を一層低減することができる。
【0073】
次に、本発明の第4実施形態を説明する。第4実施形態に係る先行車両情報提示システム100は、第3実施形態のものと同様であるが、車載機の構成及び処理内容が第1実施形態のものと一部異なっている。
【0074】
以下、第3実施形態との相違点について説明する。図20は、第4実施形態に係る車載機4の構成図である。同図に示すように、第4実施形態に係る車載機4の車両情報取得部51は、新たに、全幅や全高などの車両寸法や、最小回転半径などの車両の性能の情報を記憶した車両情報記憶部51fを備えている。
【0075】
また、車両情報記憶部51fを備えるため、車両情報補正部50は、後続車両201の最小回転半径が先行車両200の最小回転半径よりも大きい場合に、ウインカー情報220の提示タイミングを早めるべきと判断し、後続車両201の最小回転半径が先行車両200の最小回転半径以下である場合に、ウインカー情報220の提示タイミングを遅らせるべきと判断する。
【0076】
図21は、第4実施形態に係る先行車両情報提示システム100の動作を示す説明図である。同図に示すように、先行車両200が細街路を右折しようとしているものとする。ここで、後続車両201の最小回転半径が先行車両200の最小回転半径よりも大きい場合、後続車両201は先行車両200よりも右折に多くの距離を要してしまう。このため、後続車両201の最小回転半径の方が大きい場合、後続車両201が細街路を曲がりきれなくなる可能性がある。よって、車両情報補正部50は、ウインカー情報220の提示タイミングを早めるべきと判断する。
【0077】
他方、後続車両201の最小回転半径が先行車両200の最小回転半径以下である場合、後続車両201は右折に関して先行車両200と同等又は短い距離しか要しないといえる。このため、右折に若干の余裕があることとなり、車両情報補正部50はウインカー情報220の提示タイミングを遅らせるべきと判断している。すなわち、上記判断を行うことにより、ウインカー情報220の適切な提示が行うようにしている。
【0078】
このようにして、第4実施形態に係る先行車両情報提示システム100によれば、第3実施形態と同様に、追従走行の失敗の頻度を低減することができる。(請求項1の効果)また、追従走行の失敗の頻度を一層低減することができ(請求項4,5,7〜11の効果)、処理負荷の低減を図ることができる。
【0079】
さらに、第4実施形態によれば、後続車両201の最小回転半径が先行車両200の最小回転半径よりも大きい場合に、提示タイミングを早めるべきと判断し、後続車両201の最小回転半径が先行車両200の最小回転半径以下である場合に、提示タイミングを遅らせるべきと判断することとしている。ここで、後続車両201の最小回転半径が先行車両200の最小回転半径よりも大きい場合、後続車両201は先行車両200よりも右左折等に多くの距離を要してしまう。このため、後続車両201の最小回転半径の方が大きい場合、ウインカー情報220の提示タイミングを早めるべきと判断している。他方、後続車両201の最小回転半径が先行車両200の最小回転半径以下である場合、後続車両201は右左折等に関して先行車両200と同等又は短い距離しか要しないといえる。このため、右左折等に若干の余裕があることとなり、ウインカー情報220の提示タイミングを遅らせるべきと判断している。以上より、上記判断によってウインカー情報220の提示タイミングが適切となり、追従走行の失敗の頻度を一層低減することができる。
【0080】
次に、本発明の第5実施形態を説明する。第5実施形態に係る先行車両情報提示システム100は、第1実施形態のものと同様であるが、車載機の構成及び処理内容が第1実施形態のものと一部異なっている。
【0081】
以下、第1実施形態との相違点について説明する。図22は、第5実施形態に係る車載機5の構成図である。同図に示すように、第5実施形態に係る車載機5は、新たに、アルゴリズム切替判断部70を備えている。アルゴリズム切替判断部70は、自車両が先行車両200であるか後続車両201であるかを判断して、表示内容を切替えたり、送受信する情報を切替えたりするものである。
【0082】
また、アルゴリズム切替判断部70は先行車両アルゴリズム記憶部71と後続車両アルゴリズム記憶部72を有している。先行車両アルゴリズム記憶部71は、自車両が先行車両200である場合に実行する処理アルゴリズムを記憶したものである。後続車両アルゴリズム記憶部72は、自車両が後続車両201である場合に実行する処理アルゴリズムを記憶したものである。
【0083】
図23は、第5実施形態に係る先行車両情報提示システム100の動作を示す説明図である。自車両が先行車両200である場合、アルゴリズム切替判断部70は自車両が先行車両200であることを判断して、先行車両アルゴリズム記憶部71から先行車両200の処理アルゴリズムを読み込んで実行する。実行内容は、第1実施形態に示したものと同様である。
【0084】
また、先行車両200の処理アルゴリズムを実行する場合、表示部30は、図23に示すような表示を行う。すなわち、表示部30は、同図に示すように、自車両が先行車両200を示すべく、先行車両200のアイコンを太線にて表示する。
【0085】
他方、自車両が後続車両201である場合、アルゴリズム切替判断部70は自車両が後続車両201であることを判断して、後続車両アルゴリズム記憶部72から後続車両201の処理アルゴリズムを読み込んで実行する。実行内容は、第1実施形態に示したものと同様である。また、後続車両201の処理アルゴリズムを実行する場合、表示部30は、図23に示す表示例と異なり、後続車両201のアイコンを太線にて表示する。
【0086】
さらに、第5実施形態において表示部30は、先行車両200と後続車両201との間に両者の距離を示す情報230を表示する。具体的に第5実施形態では、先行車両200と後続車両201との距離を3段階で表示する。近くにいる場合(例えば80m以内の場合)、第1矢印部230aのみを点灯等させる。少し離れた場合(例えば80mを越えて120m以内の場合)、第1矢印部230a及び第2矢印部230bを点灯等させる。
【0087】
次いで、追従できなくなるくらい離れた場合(例えば120mを越える場合)、第1〜第3矢印部230a〜230cのすべてを点灯等させる。これにより、先行車両200の運転者は速度を調整したり、停車して後続車両201を待ったりすることができる。
【0088】
このようにして、第5実施形態に係る先行車両情報提示システム100によれば、第1実施形態と同様に、第1実施形態と同様に、追従走行の失敗の頻度を低減することができる。また、追従走行の失敗の頻度を一層低減することができ、処理負荷の低減を図ることができる。
【0089】
さらに、第5実施形態によれば、自車両が先行車両200であるか後続車両201であるかを判断して、自車両が先行車両200である場合には先行車両200の処理アルゴリズムを実行し、自車両が後続車両201である場合には後続車両201の処理アルゴリズムを実行することとしている。このため、自車両が先行車両200としてグループ走行するとき及び自車両が後続車両201としてグループ走行するときの双方において、追従走行の失敗が軽減された先行車両情報提示システム100を実現することができる。
【0090】
以上、実施形態に基づき本発明を説明したが、本発明は上記実施形態に限られるものではなく、本発明の趣旨を逸脱しない範囲で、変更を加えてもよいし、各実施形態を組み合わせるようにしてもよい。
【0091】
例えば、先行車両200の車両情報取得部51は、先行車両200の走行状況情報として、先行車両200が走行した道路の形状の情報を取得する。そして、後続車両201の車両情報補正部50は、前記道路の形状に応じて減速の必要性を判断し、判断した減速の必要性が高まるに従って前記ウインカー情報の提示タイミングを早めるべきと判断し、判断した減速の必要性が低くなるに従って前記ウインカー情報の提示タイミングを遅らせるべきと判断するようにしてもよい。
【0092】
ここで、十字路などでは充分に減速したうえで右左折を行わなければ、速度が高い場合には十字路を曲がりきれないこととなってしまう。このため、先行車両200が十字路を右左折した場合において、後続車両201が充分に速度を低下させずに十字路に差し掛かってしまった場合、後続車両201の運転者は十字路を直進してしまい、追従走行に失敗する可能性がでてきてしまう。よって、十字路など減速の必要性が高まるに従ってウインカー情報220の提示タイミングを早め、減速を促すべきである。
【0093】
逆に、Y字路では十字路に比べると比較的に減速せずにY字路を曲がりきることができる。よって、Y字路など減速の必要性が低くなるに従ってウインカー情報220の提示タイミングを遅くするようにしてもよい。
【0094】
このように、道路の形状に応じてウインカー情報220の提示タイミングを変更することによっても、追従走行の失敗の頻度を一層低減することができる。
【図面の簡単な説明】
【0095】
【図1】先行車両のウインカー操作の情報及びその提示タイミングを示す従来技術の説明図である。
【図2】本発明の第1実施形態に係る先行車両情報提示システムの構成図である。
【図3】図2に示した車載機1の詳細構成図である。
【図4】表示部30による地図表示の一例を示す説明図である。
【図5】表示部30による簡易表示の一例を示す説明図である。
【図6】第1実施形態に係る先行車両情報提示システム100の詳細な動作を示すフローチャートである。
【図7】図6のステップST12における情報提示の一例を示す説明図である。
【図8】ウインカー情報220の提示の様子を示す説明図である。
【図9】ブレーキを踏む旨の情報提示の一例を示す説明図である。
【図10】シフトダウンする旨の情報提示の一例を示す説明図である。
【図11】第2実施形態に係る車載機2の構成図である。
【図12】第2実施形態に係る先行車両情報提示システム100の動作を示すフローチャートである。
【図13】図12のステップST22における情報提示の一例を示す説明図である。
【図14】第2実施形態におけるウインカー情報220の提示の様子を示す第1の説明図である。
【図15】第2実施形態におけるウインカー情報220の提示の様子を示す第2の説明図である。
【図16】第3実施形態に係る車載機3の構成図である。
【図17】第3実施形態に係る先行車両情報提示システム100の動作を示すフローチャートである。
【図18】図17のステップST32における情報提示の一例を示す説明図である。
【図19】第3実施形態におけるウインカー情報220の提示の様子を示す説明図である。
【図20】第4実施形態に係る車載機4の構成図である。
【図21】第4実施形態に係る先行車両情報提示システム100の動作を示す説明図である。
【図22】第5実施形態に係る車載機5の構成図である。
【図23】第5実施形態に係る先行車両情報提示システム100の動作を示す説明図である。
【符号の説明】
【0096】
1〜5…車載機
10…送受信部(送信手段、受信手段)
11…アンテナ
20…先行車情報格納部
30…表示部(提示手段)
40…アイコン格納部
50…車両情報補正部(タイミング補正手段)
51…車両情報取得部(先行車両情報取得手段、後続車両車両情報取得手段)
51a…ウインカー情報取得部
51b…操舵角情報取得部
51c…車速情報取得部
51d…車線情報取得部
51e…信号機情報取得部
51f…車両情報記憶部
60…制御部
70…アルゴリズム切替判断部
71…先行車両アルゴリズム記憶部
72…後続車両アルゴリズム記憶部
100…先行車両情報提示システム
200…先行車両
201…後続車両
220…ウインカー情報
【特許請求の範囲】
【請求項1】
先行車両と先行車両に追従して走行する後続車両との間で無線通信を行い、先行車両のウインカー操作の情報を運転者に提示する先行車両情報提示システムにおいて、
先行車両と後続車両とにそれぞれ搭載される車載機を備え、
先行車両の車載機は、
先行車両のウインカー操作の情報を取得する先行車両情報取得手段と、
前記先行車両情報取得手段により取得された先行車両のウインカー情報を無線送信する送信手段と、を有し、
後続車両の車載機は、
前記送信手段により無線送信されたウインカー情報を受信する受信手段と、
前記受信手段により受信されたウインカー情報を後続車両の運転者に提示する提示手段と、
先行車両及び後続車両の少なくとも一方の走行状況から、前記ウインカー情報の提示タイミングを早めるべきか遅らせるべきかを判断し、判断したタイミングで前記提示手段にウインカー情報を提示させるタイミング補正手段と、を有する
ことを特徴とする先行車両情報提示システム。
【請求項2】
前記タイミング補正手段は、後続車両の追従走行が乱れると予測される場合に、ウインカー情報の提示タイミングを早めるべきか遅らせるべきかを判断することを特徴とする請求項1に記載の先行車両情報提示システム。
【請求項3】
後続車両の追従走行が乱れると予測される場合とは、先行車両が右左折した場合、先行車両が車線変更した場合、及び先行車両が有料道路の料金所を通過する場合の少なくとも1つであることを特徴とする請求項2に記載の先行車両情報提示システム。
【請求項4】
前記先行車両情報取得手段は、ウインカー情報に加えて、先行車両の走行状況情報を取得し、
前記送信手段は、先行車両の走行状況情報を送信し、
前記受信手段は、前記送信手段から先行車両の走行状況情報を受信し、
前記タイミング補正手段は、受信した先行車両の走行状況情報から、前記提示手段によるウインカー情報の提示タイミングを早めるべきか遅らせるべきかを判断する
ことを特徴とする請求項1〜請求項3のいずれか1項に記載の先行車両情報提示システム。
【請求項5】
前記先行車両情報取得手段は、先行車両の走行状況情報として、ウインカー操作した時点における先行車両から交差点までの距離の情報を取得し、
前記タイミング補正手段は、前記距離が長くなるに従って前記ウインカー情報の提示タイミングを早めるべきと判断し、前記距離が短くなるに従って前記ウインカー情報の提示タイミングを遅らせるべきと判断する
ことを特徴とする請求項4に記載の先行車両情報提示システム。
【請求項6】
前記先行車両情報取得手段は、先行車両の走行状況情報として、先行車両が走行した道路の形状の情報を取得し、
前記タイミング補正手段は、前記道路の形状に応じて減速の必要性を判断し、判断した減速の必要性が高まるに従って前記ウインカー情報の提示タイミングを早めるべきと判断し、判断した減速の必要性が低くなるに従って前記ウインカー情報の提示タイミングを遅らせるべきと判断する
ことを特徴とする請求項4に記載の先行車両情報提示システム。
【請求項7】
後続車両の車載機は、後続車両の走行状況の情報を取得する後続車両情報取得手段をさらに有し、
前記タイミング補正手段は、先行車両の走行状況情報と後続車両の走行状況情報との双方から、前記提示手段によるウインカー情報の提示タイミングを早めるべきか遅らせるべきかを判断する
ことを特徴とする請求項4に記載の先行車両情報提示システム。
【請求項8】
前記先行車両情報取得手段及び前記後続車両情報取得手段は、走行状況情報として車速情報を取得し、
前記タイミング補正手段は、現在の後続車両の車速が後続車両の現在地点における先行車両の車速を上回る場合に、前記ウインカー情報の提示タイミングを早めるべきと判断し、現在の後続車両の車速が後続車両の現在地点における先行車両の車速以下である場合に、前記ウインカー情報の提示タイミングを遅らせるべきと判断する
ことを特徴とする請求項7に記載の先行車両情報提示システム。
【請求項9】
前記提示手段は、現在の後続車両の車速が後続車両の現在地点における先行車両の車速を上回る場合、ブレーキを踏む旨、及びシフトダウンする旨の少なくとも一方の情報を、前記前記ウインカー情報に先だって提示することを特徴とする請求項8に記載の先行車両情報提示システム。
【請求項10】
前記先行車両情報取得手段及び前記後続車両情報取得手段は、走行状況情報として走行車線の情報を取得し、
前記タイミング補正手段は、後続車両の現在地点において先行車両が走行していた走行車線と後続車両の現在の走行車線とが異なる場合に、前記ウインカー情報の提示タイミングを早めるべきと判断する
ことを特徴とする請求項7に記載の先行車両情報提示システム。
【請求項11】
前記先行車両情報取得手段及び前記後続車両情報取得手段は、走行状況情報として車両が通過する信号機の状態の情報を取得し、
前記タイミング補正手段は、後続車両が次に通過する信号機に先行車両が差し掛かったときには信号機が赤を示していたが後続車両が差し掛かるときには青を示している場合、前記ウインカー情報の提示タイミングを早めるべきと判断し、後続車両が次に通過する信号機に先行車両が差し掛かったときには信号機が青を示していたが後続車両が差し掛かるときには赤を示している場合、前記ウインカー情報の提示タイミングを遅らせるべきと判断する
ことを特徴とする請求項7に記載の先行車両情報提示システム。
【請求項12】
前記先行車両情報取得手段及び前記後続車両情報取得手段は、走行状況情報として車両の最小回転半径の情報を取得し、
前記タイミング補正手段は、後続車両の最小回転半径が先行車両の最小回転半径よりも大きい場合に、前記ウインカー情報の提示タイミングを早めるべきと判断し、後続車両の最小回転半径が先行車両の最小回転半径以下である場合に、前記ウインカー情報の提示タイミングを遅らせるべきと判断する
ことを特徴とする請求項7に記載の先行車両情報提示システム。
【請求項1】
先行車両と先行車両に追従して走行する後続車両との間で無線通信を行い、先行車両のウインカー操作の情報を運転者に提示する先行車両情報提示システムにおいて、
先行車両と後続車両とにそれぞれ搭載される車載機を備え、
先行車両の車載機は、
先行車両のウインカー操作の情報を取得する先行車両情報取得手段と、
前記先行車両情報取得手段により取得された先行車両のウインカー情報を無線送信する送信手段と、を有し、
後続車両の車載機は、
前記送信手段により無線送信されたウインカー情報を受信する受信手段と、
前記受信手段により受信されたウインカー情報を後続車両の運転者に提示する提示手段と、
先行車両及び後続車両の少なくとも一方の走行状況から、前記ウインカー情報の提示タイミングを早めるべきか遅らせるべきかを判断し、判断したタイミングで前記提示手段にウインカー情報を提示させるタイミング補正手段と、を有する
ことを特徴とする先行車両情報提示システム。
【請求項2】
前記タイミング補正手段は、後続車両の追従走行が乱れると予測される場合に、ウインカー情報の提示タイミングを早めるべきか遅らせるべきかを判断することを特徴とする請求項1に記載の先行車両情報提示システム。
【請求項3】
後続車両の追従走行が乱れると予測される場合とは、先行車両が右左折した場合、先行車両が車線変更した場合、及び先行車両が有料道路の料金所を通過する場合の少なくとも1つであることを特徴とする請求項2に記載の先行車両情報提示システム。
【請求項4】
前記先行車両情報取得手段は、ウインカー情報に加えて、先行車両の走行状況情報を取得し、
前記送信手段は、先行車両の走行状況情報を送信し、
前記受信手段は、前記送信手段から先行車両の走行状況情報を受信し、
前記タイミング補正手段は、受信した先行車両の走行状況情報から、前記提示手段によるウインカー情報の提示タイミングを早めるべきか遅らせるべきかを判断する
ことを特徴とする請求項1〜請求項3のいずれか1項に記載の先行車両情報提示システム。
【請求項5】
前記先行車両情報取得手段は、先行車両の走行状況情報として、ウインカー操作した時点における先行車両から交差点までの距離の情報を取得し、
前記タイミング補正手段は、前記距離が長くなるに従って前記ウインカー情報の提示タイミングを早めるべきと判断し、前記距離が短くなるに従って前記ウインカー情報の提示タイミングを遅らせるべきと判断する
ことを特徴とする請求項4に記載の先行車両情報提示システム。
【請求項6】
前記先行車両情報取得手段は、先行車両の走行状況情報として、先行車両が走行した道路の形状の情報を取得し、
前記タイミング補正手段は、前記道路の形状に応じて減速の必要性を判断し、判断した減速の必要性が高まるに従って前記ウインカー情報の提示タイミングを早めるべきと判断し、判断した減速の必要性が低くなるに従って前記ウインカー情報の提示タイミングを遅らせるべきと判断する
ことを特徴とする請求項4に記載の先行車両情報提示システム。
【請求項7】
後続車両の車載機は、後続車両の走行状況の情報を取得する後続車両情報取得手段をさらに有し、
前記タイミング補正手段は、先行車両の走行状況情報と後続車両の走行状況情報との双方から、前記提示手段によるウインカー情報の提示タイミングを早めるべきか遅らせるべきかを判断する
ことを特徴とする請求項4に記載の先行車両情報提示システム。
【請求項8】
前記先行車両情報取得手段及び前記後続車両情報取得手段は、走行状況情報として車速情報を取得し、
前記タイミング補正手段は、現在の後続車両の車速が後続車両の現在地点における先行車両の車速を上回る場合に、前記ウインカー情報の提示タイミングを早めるべきと判断し、現在の後続車両の車速が後続車両の現在地点における先行車両の車速以下である場合に、前記ウインカー情報の提示タイミングを遅らせるべきと判断する
ことを特徴とする請求項7に記載の先行車両情報提示システム。
【請求項9】
前記提示手段は、現在の後続車両の車速が後続車両の現在地点における先行車両の車速を上回る場合、ブレーキを踏む旨、及びシフトダウンする旨の少なくとも一方の情報を、前記前記ウインカー情報に先だって提示することを特徴とする請求項8に記載の先行車両情報提示システム。
【請求項10】
前記先行車両情報取得手段及び前記後続車両情報取得手段は、走行状況情報として走行車線の情報を取得し、
前記タイミング補正手段は、後続車両の現在地点において先行車両が走行していた走行車線と後続車両の現在の走行車線とが異なる場合に、前記ウインカー情報の提示タイミングを早めるべきと判断する
ことを特徴とする請求項7に記載の先行車両情報提示システム。
【請求項11】
前記先行車両情報取得手段及び前記後続車両情報取得手段は、走行状況情報として車両が通過する信号機の状態の情報を取得し、
前記タイミング補正手段は、後続車両が次に通過する信号機に先行車両が差し掛かったときには信号機が赤を示していたが後続車両が差し掛かるときには青を示している場合、前記ウインカー情報の提示タイミングを早めるべきと判断し、後続車両が次に通過する信号機に先行車両が差し掛かったときには信号機が青を示していたが後続車両が差し掛かるときには赤を示している場合、前記ウインカー情報の提示タイミングを遅らせるべきと判断する
ことを特徴とする請求項7に記載の先行車両情報提示システム。
【請求項12】
前記先行車両情報取得手段及び前記後続車両情報取得手段は、走行状況情報として車両の最小回転半径の情報を取得し、
前記タイミング補正手段は、後続車両の最小回転半径が先行車両の最小回転半径よりも大きい場合に、前記ウインカー情報の提示タイミングを早めるべきと判断し、後続車両の最小回転半径が先行車両の最小回転半径以下である場合に、前記ウインカー情報の提示タイミングを遅らせるべきと判断する
ことを特徴とする請求項7に記載の先行車両情報提示システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2006−209535(P2006−209535A)
【公開日】平成18年8月10日(2006.8.10)
【国際特許分類】
【出願番号】特願2005−21693(P2005−21693)
【出願日】平成17年1月28日(2005.1.28)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成18年8月10日(2006.8.10)
【国際特許分類】
【出願日】平成17年1月28日(2005.1.28)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]