
先行車検出装置
【課題】従来に比して正確に先行車の位置を検出可能な先行車検出装置を提供する。
【解決手段】自車両の前方を走行する先行車の位置を検出する先行車検出装置であって、少なくとも先行車の左右方向の位置情報を検出する先行車位置検出手段と、現時点において検出した位置情報を補正するフィルタ補正手段と、先行車の走行状態を推定する先行車走行状態推定手段と、フィルタ補正手段による補正の度合いを、先行車走行状態推定手段によって推定された先行車の走行状態に応じて変更するフィルタ制御手段とを備える先行車検出装置である。
【解決手段】自車両の前方を走行する先行車の位置を検出する先行車検出装置であって、少なくとも先行車の左右方向の位置情報を検出する先行車位置検出手段と、現時点において検出した位置情報を補正するフィルタ補正手段と、先行車の走行状態を推定する先行車走行状態推定手段と、フィルタ補正手段による補正の度合いを、先行車走行状態推定手段によって推定された先行車の走行状態に応じて変更するフィルタ制御手段とを備える先行車検出装置である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、先行車検出装置に関し、より特定的には、検出した先行車位置情報をフィルタ補正処理する先行車検出装置に関する。
【背景技術】
【0002】
従来、衝突防止や追従走行等の自車両の走行制御を実行するために、先行車の位置を検出する先行車検出装置が開発されている。このような先行車検出装置の一種として、電磁波等の搬送波を車両の周囲に照射し、当該搬送波が先行車に反射して成る反射波を受信することによって当該先行車の位置を検出するレーダー装置が知られている。このようなレーダー装置は、反射波の周波数、位相、および強度などの情報に基づいて先行車の位置を検出する。
【0003】
上記のようなレーダー装置によって先行車を継続的に追従検出する際、当該先行車における電磁波の照射箇所、すなわち反射する部材の形状や材質等が変化すると、同一先行車であっても反射波の情報が変化する場合がある。例えば、電磁波の照射箇所が樹脂製のバンパー、鋼板製のボディー、またはガラスの何れの部位で反射されるかによって反射波の情報が変化する。このような場合、例えば、実際には先行車が直進しており、横方向の位置が変化していない場合であっても、当該先行車が蛇行しているかのようにレーダー装置によって検出されてしまう場合がある。
【0004】
上記のような問題を解決すべく開発された先行車検出装置の一例が、特許文献1に開示されている。特許文献1に開示されるレーダー装置は、物体を検出した場合、当該物体と過去の検出物との同一性を判定する。そして、レーダー装置は、検出した物体を過去にも検出していた場合、当該物体の現時点の検出位置を当該物体の過去の検出位置に応じて補正するフィルタリング処理を行う。具体的には、当該レーダー装置は、検出物の現時点の検出位置と、過去の検出位置とを重み付け加算した結果を現時点の検出位置として算出する。このような処理によれば、当該物体の検出位置がばらつくことを防ぐことができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−183451号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、実際に検出物とレーダー装置との相対位置が変化している場合に上記のようなフィルタリング処理を実行すると、算出される検出物の位置の時間応答性が低下する虞があった。
【0007】
例えば、レーダー装置が車線変更している先行車を検出している場合を想定する。ここで、レーダー装置は、上記のフィルタリング処理を実行することによって、検出した現時点の先行車の位置を過去の検出位置に近づけるように補正してしまう。その結果、レーダー装置が算出した先行車の位置は、実際の先行車の位置に比べて時間的に遅れた位置を示すようになる。したがって、例えば、実際には先行車が移動先の車線への移動を完了した時点において、レーダー装置では、先行車が未だに車線変更中であるものとして検出される場合がある。
【0008】
そして、このような応答性の低下によって現時点における先行車の位置を正確に検出できない場合、当該位置情報を用いた自車両の走行制御を最適に実行できなくなる虞があった。
【0009】
本発明は上記の課題を鑑みて成されたものであり、従来に比して正確に先行車の位置を検出可能とする先行車検出装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記の課題を解決するため、本願は以下の構成を採用した。すなわち、第1の発明は、自車両の前方を走行する先行車の位置を検出する先行車検出装置であって、少なくとも先行車の左右方向の位置情報を検出する先行車位置検出手段と、現時点において検出した位置情報を補正するフィルタ補正手段と、先行車の走行状態を推定する先行車走行状態推定手段と、フィルタ補正手段による補正の度合いを、先行車走行状態推定手段によって推定された先行車の走行状態に応じて変更するフィルタ制御手段とを備える先行車検出装置である。
【0011】
第2の発明は、第1の発明において、先行車走行状態検出手段は、先行車が自車両が走行する自車走行車線から離脱中か否かを推定し、フィルタ制御手段は、先行車が自車走行車線から離脱中であると推定された場合、フィルタ補正手段による補正の度合いを先行車が自車走行車線から離脱中でないと推定された場合に比べて低くすることを特徴とする。
【0012】
第3の発明は、第2の発明において、自車走行車線に隣接する隣接車線が有るか否かを推定する隣接車線推定手段をさらに備え、離脱推定手段は、少なくとも隣接車線が有ると推定された場合に、先行車が離脱中であると推定することを特徴とする。
【0013】
第4の発明は、第2乃至3の何れか1つ発明において、自車両から自車両が走行する道路の路側物までの横方向の距離を路側物距離として検出する路側距離検出手段をさらに備え、隣接車線推定手段は、路側物距離に基づいて隣接車線の有無を推定することを特徴とする。
【0014】
第5の発明は、第4の発明において、自車走行車線と隣接車線との境界位置を推定する車線境界位置推定手段をさらに備え、隣接車線推定手段は、隣接車線が存在すると仮定した場合の当該隣接車線の車線幅を路側物距離および境界位置に基づいて推定し、(A)当該車線幅が所定の車線幅閾値以上である場合、隣接車線が有ると判定し、(B)当該車線幅が所定の車線幅閾値未満である場合、隣接車線が無いと判定することを特徴とする。
【0015】
第6の発明は、第5の発明において、先行車までの距離が長いほど、車線幅閾値の大きさを大きな値に変更する閾値変更手段をさらに備えることを特徴とする。
【0016】
第7の発明は、第3の発明において、自車両と並走する並走車を検出する並走車検出手段をさらに備え、隣接車線推定手段は、並走車を検出した場合、隣接車線が有ると判定することを特徴とする。
【0017】
第8の発明は、第3乃至7の何れか1つの発明において、先行車位置検出手段により検出された位置情報を記憶する記憶手段をさらに備え、先行車が左右何れの方向へ移動しているかを現在および過去の位置情報に基づいて算出する移動方向算出手段をさらに備え、隣接車線推定手段は、先行車の移動方向側に隣接車線が有るか否かを判定し、フィルタ制御手段は、フィルタ補正手段による補正の度合いを、先行車の移動方向側に隣接車線が有るか否かに応じて変更することを特徴とする。
【0018】
第9の発明は、第1乃至8の発明において、先行車位置検出手段により検出された位置情報を記憶する記憶手段をさらに備え、フィルタ補正手段は、現時点の位置情報と過去の位置情報とを各々所定のフィルタ係数に応じた重みを付けて加算することによって、当該現時点の位置情報を補正することを特徴とする。
【0019】
第10の発明は、第9の発明において、フィルタ制御手段は、隣接車線が有ると推定された場合、現時点の位置情報の重みが隣接車線が無いと推定された場合に比べて重くなるようフィルタ係数の値を変更することによって、当該補正の度合いを弱くするを特徴とする。
【発明の効果】
【0020】
第1の発明によれば、フィルタ補正手段による補正の度合いを、先行車の走行状態に応じて変更することができる。したがって、例えば、フィルタ補正手段による補正の度合いに応じて先行車の位置情報の検出応答速度が変化する場合に、先行車の走行状態に応じて適切な補正を行い、適切な応答速度で当該先行車の位置を検出することができる。故に、先行車の位置を正確に検出することが可能である。
【0021】
第2の発明によれば、先行車が自車走行車線から離脱中である場合に、フィルタ補正手段による補正の度合いを低くすることができる。したがって、先行車が自車走行車線から離脱中である場合、当該先行車の位置を応答性良く検出することができる。一方、先行車が自車走行車線を走行している間は、フィルタ補正手段による補正の度合いを低減することなく位置情報を補正し、当該位置情報のばらつきを低減することができる。
【0022】
第3の発明によれば、先行車が自車走行車線から離脱中であるか否かを隣接車線の有無に応じて正確に判定することができる。隣接車線が存在しない場合には、先行車は車線変更ができないため、離脱中でないと想定される。したがって、隣接車線の有無を勘案することによって、先行車が自車走行車線から離脱中であるか否かを、より正確に判定することができるのである。
【0023】
第4の発明によれば、路側物までの距離に基づいて隣接車線の有無を推定することができる。隣接車線が存在する場合には、前記自車両から前記自車両が走行する道路の路側物までの路側物距離が比較的長いと考えられる。したがって、路側物距離を用いることによって隣接車線の有無を容易に推定することができる。
【0024】
第5の発明によれば、隣接車線の車線幅を推定することによって、隣接車線の有無を正確に推定することができる。
【0025】
第6の発明によれば、隣接車線の有無をさらに正確に推定することができる。路側物距離は、自車両から遠方になるほど検出精度が低下する。すなわち、自車両から遠方になるほど、算出した隣接車線の車線幅に誤差が生じやすくなる。その点、第6の発明によれば、自車両から先行車までの距離に応じて車線幅閾値の値が設定されるため、このような誤差を許容して隣接車線の有無を推定することができる。
【0026】
第7の発明によれば、並走車の有無に応じて容易に隣接車線の有無を推定することができる。自車両と並走する並走車が存在する場合、隣接車線が存在すると考えられるため、当該並走車を検出することによって隣接車線の有無を推定可能である。
【0027】
第8の発明によれば、先行車の移動方向についてのみ隣接車線の有無を判定し、当該判定結果に応じてフィルタ補正手段による補正の度合いを変更することができる。したがって自車走行車線の両側について隣接車線の有無を推定する必要が無く、少ない処理量で上記の効果を得ることができる。
【0028】
第9の発明によれば、先行車の位置情報がばらつくことを簡単な処理で防止することができる。例えば、直進している先行車を追従して継続的に検出している場合、反射箇所の変化等により先行車の横位置が瞬間的にずれて検出されたとしても、当該横位置を過去の横位置に近づけるように補正して検出位置とすることができる。
【0029】
第10の発明によれば、係数値を変更する簡単な処理で、容易に補正の度合いを変更することができる。
【図面の簡単な説明】
【0030】
【図1】先行車検出装置1の構成を示すブロック図の一例
【図2】第1の実施形態に係る位置情報処理ECU20が実行する処理の詳細を示すフローチャートの一例
【図3】マッピングされた先行車200の位置情報を示すイメージ図
【図4】位置情報処理ECU20が実行する先行車離脱判定処理の詳細を示すフローチャートの一例
【図5】車線幅閾値テーブルの概念を示す図
【図6】先行車200の実際の走行経路の一例を示す図
【図7】図6のように走行する先行車200を先行車検出装置1および従来のレーダー装置によって検出した結果を示した図
【図8】第2の実施形態に係る位置情報処理ECU20が実行する処理の詳細を示すフローチャートの一例
【発明を実施するための形態】
【0031】
(第1の実施形態)
以下、本発明の第1の実施形態に係る先行車検出装置1について説明する。先行車検出装置1は、車両に搭載され、当該車両の前方を走行する先行車の位置情報を検出、および当該位置情報の補正処理を行う装置である。以下では、先行車検出装置1が自車両100に搭載される例について説明する。
【0032】
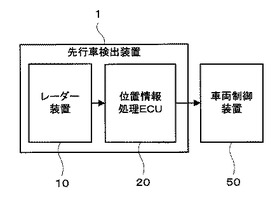
先ず、図1を参照して先行車検出装置1のハードウェア構成について説明する。なお、図1は、先行車検出装置1の構成を示すブロック図の一例である。図1に示すように。先行車検出装置は、レーダー装置10、および位置情報処理ECU20を備える。
【0033】
レーダー装置10は、自車両100の周囲の物体の位置情報を検出する装置である。レーダー装置10は、典型的にはFM−CW方式のミリ波レーダー装置である。レーダー装置10は、位置情報処理ECU20と電気的に接続され、検出した物体の位置情報を位置情報処理ECU20へ送信する。レーダー装置10は、例えば、フロントグリルやフロントバンパー等の自車両100の前方に搭載され、自車両100の前方および前側方の物体を検出する。
【0034】
位置情報処理ECU20は、典型的には、CPU(Central Processing Unit:中央処理装置)などの情報処理装置、メモリなどの記憶装置、およびインターフェース回路などを備える制御装置である。位置情報処理ECU20は、レーダー装置10から受信した物体の位置情報を必要に応じてフィルタ補正処理し、最終的に得られた物体の位置情報を自車両100に搭載された車両制御装置50へ送信する。
【0035】
車両制御装置50は、自車両100の走行を制御する装置である。車両制御装置50は、例えば、位置情報処理ECU20から受信した検出物の位置情報に基づいて、当該検出物と自車両100との衝突を予測し、当該衝突を回避すべく自車両100のブレーキを自動的に動作させる。
【0036】
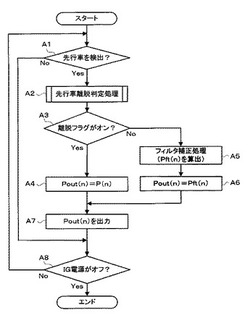
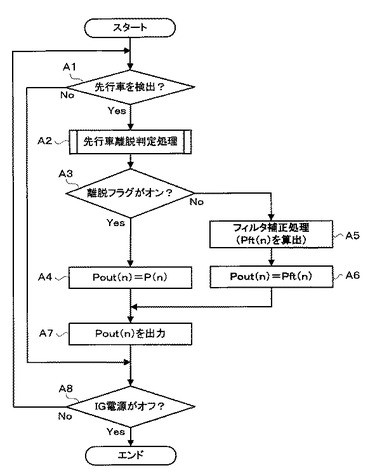
次いで、図2を参照して、位置情報処理ECU20が実行する処理について説明する。図2は、第1の実施形態に係る位置情報処理ECU20が実行する処理の詳細を示すフローチャートの一例である。位置情報処理ECU20は、自車両100のIG電源がオン状態に設定されると、図2のフローチャートの処理を実行する。位置情報処理ECU20は、図2のフローチャートの処理を開始すると、先ず、ステップA1の処理を実行する。
【0037】
ステップA1において、位置情報処理ECU20は、先行車200を検出したか否か判定する。位置情報処理ECU20は、例えば、レーダー装置10から取得した物体の位置情報に基づいて、自車両100の進行方向と同一方向へ所定の速度以上で移動する物体を自車両100の前方において所定時間以上継続して検出した場合、当該物体を先行車200として検出する。位置情報処理ECU20は、先行車200を検出したと判定した場合、処理をステップA2へ進める。一方、位置情報処理ECU20は、先行車200を検出していないと判定した場合、処理をステップA8へ進める。
【0038】
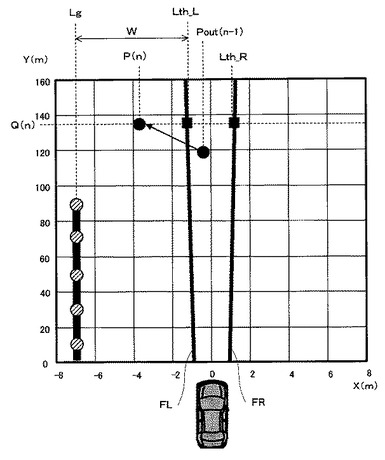
なお、ステップA1において、位置情報処理ECU20は、検出した先行車200の位置を、仮想空間上にマッピングする。例えば、位置情報処理ECU20は、図3に示すように、自車両100を原点とし、自車両100の進行方向を示す軸線をY軸、自車両100の左右方向を示す軸線をX軸とする座標系に先行車200の位置情報をマッピングする。なお、図3は、マッピングされた先行車200の位置情報を示すイメージ図である。図3に示す通り、自車両100から前方へ離れるほどY座標の値が大きくなり、自車両100から見て右へ離れる程、X座標の値が大きくなる。以下では当該マップにおける先行車200の横位置情報(X座標)を検出横位置P(n)と呼称する。また、先行車200の縦位置情報(Y座標)を検出縦位置Q(n)と呼称する。なお、検出横位置P(n)および検出縦位置Q(n)の添え字のnは、現在時刻を表し、n−1,n−2,…は各々、1サンプリング時間前、2サンプリング時間前、…の時刻を示す。すなわち、P(n)は、現時点の先行車200の検出横位置を示し、P(n−1)は、1サンプリング前の先行車200の検出横位置を示す。また、上記の先行車200の検出方法、およびマッピングの方法は一例であり、位置情報処理ECU20は、従来周知の任意の手法を用いてこれらの処理を行って構わない。
【0039】
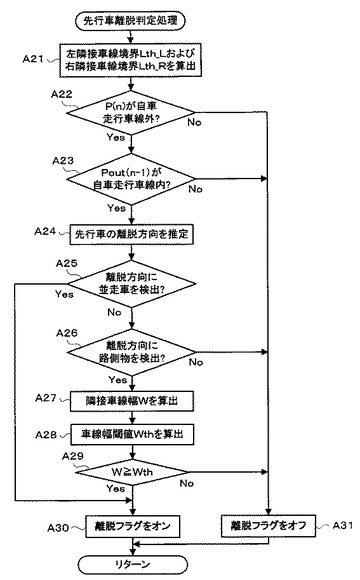
ステップA2において、位置情報処理ECU20は、先行車離脱判定処理を実行する。先行車離脱判定処理は、自車両100の前方を走行する先行車200が自車両100の走行車線(以下、自車走行車線と呼称する)から離脱中であるか否かを推定する処理である。位置情報処理ECU20は、先行車離脱判定処理において、先行車が自車走行車線から離脱中であると推定した場合、離脱フラグをオン状態に設定し、先行車が自車走行車線から離脱中でないと推定した場合、離脱フラグをオフ状態に設定する。離脱フラグは、位置情報処理ECU20の記憶装置に記憶されるフラグデータである。以下、図4を参照し、先行車離脱判定処理の詳細について説明する。図4は、位置情報処理ECU20が実行する先行車離脱判定処理の詳細を示すフローチャートの一例である。位置情報処理ECU20は、先行車離脱判定処理を開始すると、先ず、ステップA21の処理を実行する。
【0040】
ステップA21において、位置情報処理ECU20は、左隣接車線境界Lth_Lおよび右隣接車線境界Lth_Rを算出する。左隣接車線境界Lth_Lは、自車走行車線と、自車走行車線の左側の隣接車線(以下、左隣接車線と呼称する)との境界線の推定位置である。右隣接車線境界Lth_Rは、自車走行車線と、自車走行車線の右側の隣接車線(以下、右隣接車線と呼称する)との境界線の予想位置である。すなわち、左隣接車線境界Lth_Lおよび右隣接車線境界Lth_Rは、各々、自車走行車線の左端および右端の推定位置を示す。位置情報処理ECU20は、図2において示したXY座標系において予め定められた関数FLに基づいて左隣接車線境界Lth_Lを、関数FRに基づいて右隣接車線境界Lth_Rを各々算出する。具体的には、位置情報処理ECU20は、ステップA1において検出した先行車200の検出縦位置Q(n)を関数FLへ入力して得られる出力値を左隣接車線境界Lth_Lとして算出する。同様に位置情報処理ECU20は、ステップA1において検出した先行車200の検出縦位置Q(n)を関数FRへ入力して得られる出力値を右隣接車線境界Lth_Rとして算出する。このような処理により、位置情報処理ECU20は、先行車200の近傍における車線の境界位置を予測する。位置情報処理ECU20は、ステップA21の処理を完了すると、処理をステップA22へ進める。
【0041】
ステップA22において、位置情報処理ECU20は検出横位置P(n)が自車走行車線外に存在するか否か推定する。具体的には、先ず、位置情報処理ECU20は、検出横位置P(n)が左隣接車線境界Lth_Lより外側(左隣接車線側)に存在するか否か判定する。より詳細には、位置情報処理ECU20は、検出横位置P(n)の絶対値が左隣接車線境界Lth_Lの絶対値より大きいか否かを式(1)に基づいて判定する。
|P(n)|>|Lth_L| …(1)
次いで、位置情報処理ECU20は、検出横位置P(n)が右隣接車線境界Lth_Rより外側(右隣接車線側)に存在するか否か判定する。具体的には、位置情報処理ECU20は、検出横位置P(n)の絶対値が右隣接車線境界Lth_Rの絶対値より大きいか否かを式(2)に基づいて判定する。
|P(n)|>|Lth_R| …(2)
そして、位置情報処理ECU20は、検出横位置P(n)の絶対値が左隣接車線境界Lth_Lの絶対値より大きい場合、または、右隣接車線境界Lth_Rの絶対値より大きい場合、検出横位置P(n)が自車走行車線外に存在すると推定し、処理をステップA23へ進める。一方、位置情報処理ECU20は、検出横位置P(n)の絶対値が左隣接車線境界Lth_Lの絶対値以下であり、且つ、右隣接車線境界Lth_Rの絶対値以下である場合、検出横位置P(n)が自車走行車線内に存在していると推定し、処理をステップA31へ進める。
【0042】
ステップA23において、位置情報処理ECU20は、前回サンプリング時点の出力横位置Pout(n−1)が自車走行車線内に存在していたか否か推定する。出力横位置Pout(n)は、後述の位置情報処理ECU20の処理によって最終的に算出された先行車200の横位置情報である。具体的には、先ず、位置情報処理ECU20は、前回の出力横位置Pout(n−1)が左隣接車線境界Lth_Lより内側(自車走行車線側)に存在するか否か判定する。より詳細には、位置情報処理ECU20は、前回の出力横位置Pout(n−1)の絶対値が左隣接車線境界Lth_Lの絶対値より小さいか否かを式(3)に基づいて判定する。
|Lth_L|>Pout(n−1) …(3)
次いで、位置情報処理ECU20は、前回の出力横位置Pout(n−1)が右隣接車線境界Lth_Rより内側(自車走行車線側)に存在するか否か判定する。具体的には、位置情報処理ECU20は、前回の出力横位置Pout(n−1)の絶対値が右隣接車線境界Lth_Rの絶対値より小さいか否かを式(4)に基づいて判定する。
|Lth_R|>Pout(n−1) …(4)
そして、位置情報処理ECU20は、前回サンプリング時点の出力横位置Pout(n−1)の絶対値が左隣接車線境界Lth_Lの絶対値より小さく、且つ、出力横位置Pout(n−1)の絶対値が右隣接車線境界Lth_Rの絶対値より小さい場合、前回サンプリング時点の出力横位置Pout(n−1)が自車走行車線内に存在していたと推定し、処理をステップA24へ進める。一方、位置情報処理ECU20は、出力横位置Pout(n−1)の絶対値が左隣接車線境界Lth_Lの絶対値以上である場合、または、出力横位置Pout(n−1)の絶対値が右隣接車線境界Lth_Rの絶対値以上である場合、出力横位置Pout(n−1)が自車走行車線内に存在していなかったと推定し、処理をステップA31へ進める。
【0043】
上述ステップA21からステップA23の処理は、先行車が自車走行車線から隣接車線へ離脱しているか否かを先行車200の位置情報に基づいて推定する処理である。過去に自車走行車線内に存在していた先行車200の位置が、現時点において隣接車線へ移動している場合、先行車200が自車走行車線から離脱中であると考えられる。このような観点から、位置情報処理ECU20は、ステップA21からステップA23を実行することによって先行車200が自車走行車線から離脱中であるか否かを判定することができる。
【0044】
ステップA24において、位置情報処理ECU20は、先行車200が自車走行車線から左右何れの方向へ離脱中であるか推定する。以下、先行車200が離脱している方向を離脱方向と呼称する。例えば、位置情報処理ECU20は、検出横位置P(n)が前回の出力横位置Pout(n)より大きい場合、先行車200が右方向へ離脱中であると推定し、検出横位置P(n)が前回の出力横位置Pout(n)より小さい場合、先行車200が左方向へ離脱中であると推定する。ステップA24の処理を完了すると、位置情報処理ECU20は、処理をステップA25へ進める。
【0045】
ステップA25において、位置情報処理ECU20は、並走車を検出したか否か判定する。位置情報処理ECU20は、例えば、自車両100の前側方を所定速度以上で自車両100と同方向へ進行する物体を検出した場合、当該物体を並走車として検出する。なお、上記の手法は一例であり、位置情報処理ECU20は、従来周知の手法を用いて並走車を検出しても構わない。位置情報処理ECU20は、並走車を検出したと判定した場合、処理をステップA30へ進める。一方、位置情報処理ECU20は、並走車を検出していないと判定した場合、処理をステップA26へ進める。
【0046】
上述ステップA25の処理は、先行車200が自車走行車線から隣接車線へ離脱中か否かを自車両100の並走車の有無に基づいて推定する処理である。自車両100の並走車が先行車200の離脱方向側に存在する場合、先行車200の移動先に隣接車線が存在すると考えられる。すなわち、先行車200が自車走行車線から離脱可能であると考えられる。したがって、上記ステップA25の処理によれば、位置情報処理ECU20は、自車走行車線から隣接車線へ離脱中か否かを、より正確に判定することができる。
【0047】
ステップA26において、位置情報処理ECU20は、路側物300を検出したか否か判定する。具体的には、位置情報処理ECU20は、例えば、自車両100から見て先行車200の離脱方向側に、自車走行車線に沿って静止物を連続的に検出した場合、当該物体をガードレール等の路側物300として検出する。例えば、図3に示すマップのX=−8〜−6、Y=0〜100の領域において静止物を連続して検出した場合、当該検出点を直線近似または曲線近似し、当該近似線を路側物300として検出する。なお、上記の手法は一例であり、位置情報処理ECU20は従来周知の任意の手法を用いて路側物300を検出および認識して構わない。位置情報処理ECU20は、路側物300を検出したと判定した場合、処理をステップA27へ進める。一方、位置情報処理ECU20は、路側物300を検出していないと判定した場合、処理をステップA31へ進める。
【0048】
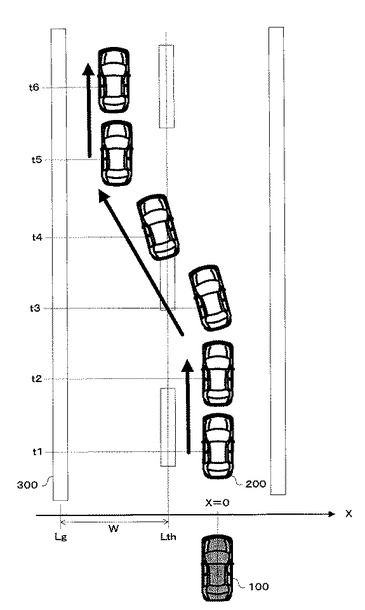
ステップA27において、位置情報処理ECU20は、隣接車線幅Wを算出する。隣接車線幅Wは、先行車200が離脱しようとしている隣接車線の幅を示す値である。具体的には、先ず、位置情報処理ECU20は、ステップA26において検出した路側物300の図3のマップにおけるX座標を路側物位置Lgとして算出する。当該路側物位置Lgは、自車両100から路側物300までの横方向の距離を示す値である。路側物300までの横方向の距離は、次いで、位置情報処理ECU20は、路側物位置Lgから路側物300が存在する方向側の隣接車線境界の値を減算して隣接車線幅Wを算出する。例えば、先行車200が自車走行車線から左側へ離脱中である場合、位置情報処理ECU20は、路側物位置Lgから左隣接車線境界Lth_Lの値を減算して隣接車線幅Wを算出する。位置情報処理ECU20は、ステップA27の処理を完了すると、処理をステップA28へ進める。
【0049】
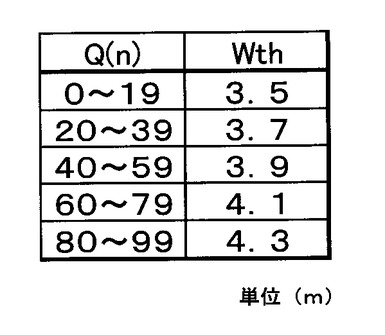
ステップA28において、位置情報処理ECU20は、車線幅閾値Wthを算出する。具体的には、位置情報処理ECU20は、検出縦位置Q(n)および車線幅閾値テーブルに基づいて車線幅閾値Wthを算出する。車線幅閾値テーブルは、車線幅閾値Wthと検出縦位置Q(n)との関係を示すデータテーブルである。図5は、車線幅閾値テーブルの概念を示す図である。図5に示すように、車線幅閾値テーブルは、列毎に検出縦位置Q(n)および車線幅閾値Wthの値が各々並べられたテーブルである。当該テーブルにおいて、1列目には検出縦位置Q(n)の値が示され、2列目には各検出縦位置Q(n)の値と対応する車線幅閾値Wthの値が示される。位置情報処理ECU20は、車線幅閾値テーブルの1列目において、ステップA12において取得した検出縦位置Q(n)の値に対応する行を探索する。そして、位置情報処理ECU20は、探索した行と同じ行の2列目に記された車線幅閾値Wthの値を検出縦位置Q(n)に対応する車線幅閾値Wthの値として算出する。そして、図5に示す車線幅閾値テーブルによれば、検出縦位置Q(n)が大きいほど車線幅閾値Wthの値が大きな値として算出される。位置情報処理ECU20は、ステップA28の処理を完了すると、処理をステップA29へ進める。
【0050】
ステップA29において、位置情報処理ECU20は、隣接車線幅Wが車線幅閾値Wth以上か否か判定する。位置情報処理ECU20は、隣接車線幅Wが車線幅閾値Wth以上であると判定した場合、処理をステップA30へ進める。一方、位置情報処理ECU20は、隣接車線幅Wが車線幅閾値Wthより小さいと判定した場合、処理をステップA31へ進める。
【0051】
上述ステップA26からステップA29の処理は、先行車200が自車走行車線から隣接車線へ離脱しているか否かを路側物300の位置情報に基づいて推定する処理である。自車両100から路側物300までの横方向の距離が比較的短い場合、すなわち、隣接車線幅が比較的狭い場合、隣接車線が存在していないと考えられる。そして、隣接車線が存在しない場合には、仮に上述ステップA21からステップA23の処理において先行車200が隣接車線へ移動していると推定されていたとしても、実際には先行車200は隣接車線へ移動不可能であるから、当該先行車200は自車走行車線から離脱していないと考えられる。このような観点から、位置情報処理ECU20は、上述ステップA26からステップA29の処理を実行することによって、先行車200が自車走行車線から離脱しているか否かをより正確に推定することができる。
【0052】
また、上記ステップA24からステップA29の処理では、先行車200の離脱方向側についてのみ隣接車線の有無を推定するため、離脱方向と逆側の隣接車線については、その有無を推定しなくて良い。すなわち、これらの処理によれば位置情報処理ECU20の処理量を低減することが可能である。なお、このような処理量の低減が不要である場合は、位置情報処理ECU20は、自車走行車線の両側について隣接車線の有無を推定して構わない。
【0053】
ステップA30において、位置情報処理ECU20は、離脱フラグをオン状態に設定する。離脱フラグは、上述の通り、オン状態である場合に先行車200が自車走行車線から離脱中であることを示すフラグデータである。位置情報処理ECU20は、ステップA30の処理を完了すると、処理をステップA図2のステップA3へ進める。
【0054】
ステップA31において、位置情報処理ECU20は、離脱フラグをオフ状態に設定する。位置情報処理ECU20は、ステップA31の処理を完了すると、処理を図2のステップA3へ進める。
【0055】
なお、上述ステップA26からステップA29までの処理では、位置情報処理ECU20が、先行車200が自車走行車線から離脱中であるか否かを、路側物位置Lgに基づいて算出した隣接車線幅Wの値に応じて判定する例について説明したが、位置情報処理ECU20は、先行車200が自車走行車線から離脱中であるか否かを路側物位置Lgの大きさに応じて直接的に判定しても構わない。例えば、位置情報処理ECU20は、路側物位置Lgが予め定められた閾値以上である場合、離脱フラグをオン状態に設定し、路側物位置Lgが予め定められた閾値未満である場合、離脱フラグをオフ状態に設定しても構わない。このような処理によれば、位置情報処理ECU20は、隣接車線幅Wを算出する処理を省略することができるので、比較的少ない処理量で先行車200が自車走行車線から離脱中であるか否かを判定することができる。
【0056】
図2の説明に戻り、ステップA3において、位置情報処理ECU20は、離脱フラグがオン状態であるか否か判定する。位置情報処理ECU20は、離脱フラグがオン状態であると判定した場合、処理をステップA4へ進める。一方、位置情報処理ECU20は、離脱フラグがオフ状態であると判定した場合、処理をステップA5へ進める。
【0057】
ステップA4において、位置情報処理ECU20は、検出横位置P(n)の値を出力横位置Pout(n)として設定する。出力横位置Pout(n)は、最終的に先行車検出装置1から車両制御装置50へ出力される先行車の横位置情報である。位置情報処理ECU20は、ステップA4の処理を完了すると、処理をステップA7へ進める。
【0058】
ステップA5において、位置情報処理ECU20は、フィルタ処理を実行する。具体的には、位置情報処理ECU20は、式(5)に示すように、現時点の検出横位置P(n)と過去の出力横位置Pout(n−1)とを各々フィルタ係数kに応じた重みを付けて加算することによって、フィルタ補正位置Pft(n)を算出する。
Pft(n)=(1−k)×Pout(n―1)+k×P(n) …(5)
なお、第1の実施形態においては、フィルタ係数kの値は位置情報処理ECU20の記憶装置に予め記憶された任意の定数とする。位置情報処理ECU20は、ステップA5の処理を完了すると、処理をステップA6へ進める。
【0059】
ステップA6において、位置情報処理ECU20は、フィルタ補正位置Pft(n)の値を出力横位置Pout(n)として設定する。位置情報処理ECU20は、ステップA6の処理を完了すると、処理をステップA7へ進める。
【0060】
ステップA7において、位置情報処理ECU20は、Pout(n)を出力する。位置情報処理ECU20は、ステップA7の処理を完了すると、処理をステップA8へ進める。
【0061】
ステップA8において、位置情報処理ECU20は、IG電源がオフに設定されたか否か判定する。位置情報処理ECU20は、IG電源がオフに設定されたと判定した場合、図2のフローチャートの処理を終了する。一方、位置情報処理ECU20は、IG電源がオン状態であると判定した場合、処理をステップA1へ戻す。
【0062】
上記に示した位置情報処理ECU20の処理によれば、先行車200が自車走行車線から離脱中であると推定された場合、フィルタ補正処理をしていない検出横位置P(n)の値がそのまま出力横位置Pout(n)として車両制御装置50へ出力される。一方、先行車200が自車走行車線から離脱中でないと推定された場合、フィルタ補正処理後のフィルタ補正位置Pft(n)の値が出力横位置Pout(n)として車両制御装置50へ出力される。
【0063】
次いで、図6および図7を参照して、上述の先行車検出装置1によって先行車200の位置が好適に検出される様子について説明する。以下、先行車200が、自車走行車線から左側の隣接車線へ離脱して走行する場合を例として説明する。
【0064】
図6は、先行車200の実際の走行経路の一例を示す図である。図6に示すように、先行車200は、時刻t1から時刻t3にかけて自車走行車線を直進し、時刻t3から時刻t5にかけて隣接車線へ車線変更し、時刻t5から時刻t6にかけて隣接車線を直進する。
【0065】
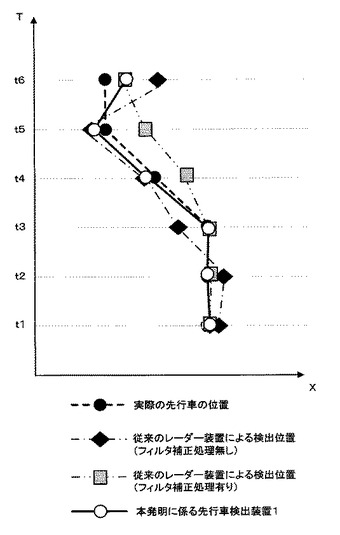
図7は、図6のように走行する先行車200を先行車検出装置1および従来のレーダー装置によって検出した結果を示した図である。図7に示すように、ステップA5のようなフィルタ補正処理を実行しない従来のレーダー装置によって先行車200を検出した場合、時刻t3、および時刻t6の時点のように実際の先行車200の位置に対してずれた位置に先行車200が存在するものとして検出してしまう(図7中、菱形プロット参照)。
【0066】
ステップA5のようなフィルタ補正処理を常時実行する従来のレーダー装置によって先行車200を検出した場合、フィルタ補正処理により時刻t3および時刻t6の時点における検出位置のばらつきを抑制することができるため、先行車200が直進している間は、上述フィルタ補正処理を実行しない従来のレーダー装置に比べて先行車200の位置を正確に検出することができる。しかしながら、フィルタ補正処理を常時実行する従来のレーダー装置は、先行車200が車線変更を行っている間にもフィルタ補正処理を実行するため、この間、現時点の検出横位置を前回の検出横位置方向へずらしてしまう。そのため、フィルタ補正処理を常時実行する従来のレーダー装置は、時刻t4から時刻t6にかけて、実際の先行車200の位置に対して時間的にずれた位置に当該先行車200が存在するものとして検出してしまう(図7中、正方形プロット参照)。
【0067】
一方、本発明に係る先行車検出装置1によれば、先行車200が直進している間はフィルタ補正処理後のフィルタ補正位置Pft(n)の値を出力値とするため、時刻t3および時刻t6の時点における検出位置のばらつきを抑制することができる。また、先行車検出装置1は、先行車200が車線変更を行っている間はフィルタ補正処理を行っていない検出横位置P(n)を出力値とするため、時刻t4から時刻t6にかけて高い応答性で先行車200の横位置を正確に検出することが可能である。
【0068】
以上に示した通り、本発明の第1の実施形態に係る先行車検出装置1によれば、フィルタ補正処理による補正の度合いを、先行車200の走行状態に応じて変更することができる。したがって、先行車200の走行状態に応じて適切な応答速度で当該先行車の位置を検出し、先行車の位置を正確に検出することが可能である。
【0069】
なお、上記第1の実施形態では、先行車が自車走行車線から離脱していないと判定された場合にのみフィルタ処理を実行する例について説明したが、位置情報処理ECU20はステップA3の判定内容に関わらず、先行車の位置を検出する毎にフィルタ処理を実行しても構わない。すなわち、位置情報処理ECU20は、ステップA5の処理を、例えばステップA1の処理後、ステップA2の処理前に実行しても構わない。このような処理を行う場合、位置情報処理ECU20は、ステップA3において先行車が離脱していないと判定した際に処理をステップA6へ進める。位置情報処理ECU20は、このような処理を行った場合においても、先行車200が自車走行車線から離脱しているか否かに応じてP(n)の値、またはPft(n)の値を適宜選択してPout(n)の値を決定することが可能である。
【0070】
(第2の実施形態)
上記第1の実施形態では、位置情報処理ECU20が、先行車200が自車走行車線から離脱するか否かに応じてフィルタ補正処理の実行/停止状態を制御する例について説明したが、位置情報処理ECU20は、先行車200が自車走行車線から離脱するか否かに応じてフィルタ補正処理の補正の度合いを変更しつつ、常時フィルタ補正処理を実行する制御を行っても構わない。以下、第2の実施形態に係る先行車検出装置について説明する。なお、第2の実施形態に係る先行車検出装置のハードウェア構成は図1に示す第1の実施形態と同様であるため、詳細な説明を省略する。
【0071】
以下、第2の実施形態に係る位置情報処理ECU20が実行する処理について図8を参照して説明する。なお、図8は、第2の実施形態に係る位置情報処理ECU20が実行する処理の詳細を示すフローチャートの一例である。図8に示す処理において、図2と同様の処理を行うステップについては同様の符号を付し、詳細な説明を省略する。
【0072】
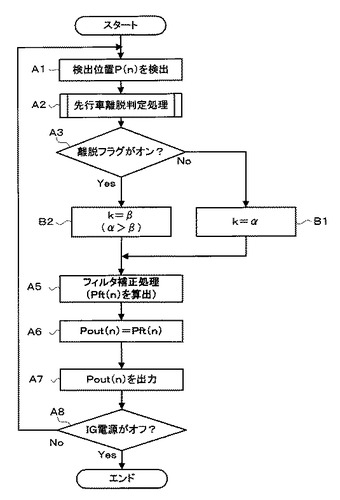
位置情報処理ECU20は、図8の処理を開始すると、図2と同様にステップA1からステップA3の処理を実行する。ここで、第2の実施形態に係る位置情報処理ECU20は、ステップA3において離脱フラグがオン状態であると判定した場合、処理をステップB2へ進める。一方、位置情報処理ECU20は、離脱フラグがオフ状態であると判定した場合、処理をステップB1へ進める。
【0073】
ステップB1において位置情報処理ECU20は、フィルタ係数kの値を通常値αに設定する。通常値αは、位置情報処理ECU20の記憶装置に予め記憶された任意の定数である。位置情報処理ECU20は、ステップB1の処理を完了すると、処理をステップA5へ進める。
【0074】
ステップB2において位置情報処理ECU20は、フィルタ係数kの値を変更値βに設定する。変更値βは、位置情報処理ECU20の記憶装置に予め記憶された任意の定数である。位置情報処理ECU20は、ステップB2の処理を完了すると、処理をステップA5へ進める。
【0075】
上記第2の実施形態に係る位置情報処理ECU20によれば、先行車200が自車走行車線から離脱している場合、フィルタ係数kの大きさを先行車200が自車走行車線から離脱していない場合に比べて小さな値に変更される。すなわち、先行車200が自車走行車線から離脱している場合、過去の出力横位置Pout(n−1)より現時点の検出横位置P(n)の重みを比較的大きくして、フィルタ補正位置Pft(n)を算出することができる。つまり、第2の実施形態に係る位置情報処理ECU20は、先行車200が自車走行車線から離脱中である場合、先行車200が自車走行車線から離脱中でない場合に比べてフィルタ補正の度合いを弱くし、応答性を高くすることができる。
【0076】
以上に示した通り、第2の実施形態に係る先行車検出装置によれば、第1の実施形態と同様に、先行車200が自車走行車線から離脱中であるか否かに応じてフィルタ補正処理を制御し、先行車200の位置を正確に検出することができる。また、第2の実施形態に係る先行車検出装置によれば、先行車200が自車走行車線から離脱している間、完全にフィルタ補正処理を停止することなく、所定の度合いでフィルタ補正処理の効果を得ることが可能である。
【0077】
なお、上記各実施形態では、位置情報処理ECU20が、先行車200が自車走行車線から隣接車線へ離脱中にフィルタ補正処理を抑制する例について説明したが、位置情報処理ECU20は、先行車200が隣接車線から自車走行車線へ進入している際にフィルタ補正処理を抑制する制御を行っても構わない。例えば、位置情報処理ECU20は、過去に隣接車線に存在していた先行車200の位置が、現時点において自車走行車線内へ移動している場合にフィルタ補正処理を抑制しても構わない。また、位置情報処理ECU20は、先行車200が自車両100から見て左右方向に移動している場合に、フィルタ補正処理を抑制して構わない。
【0078】
また、上記各実施形態では、レーダー装置10によって先行車200の位置および路側物300の位置を検出する例について説明したが、自車両の周囲の物体の位置情報を検出可能な装置であれば、レーダー装置に限らず任意の装置を用いて先行車200の位置および路側物300の位置を検出しても構わない。例えば、本発明に係る先行車検出装置は、レーダー装置10の代わりにカメラ装置を搭載する構成としても構わない。このような構成とした先行車検出装置によっても、位置情報処理ECU20が実行する処理によって上述と同様の効果を得ることが可能である。
【産業上の利用可能性】
【0079】
本発明に係る先行車検出装置は、従来に比して正確に先行車の位置を検出可能な先行車検出装置などとして有用である。
【符号の説明】
【0080】
1 先行車検出装置
10 レーダー装置
20 位置情報処理ECU
50 車両制御装置
100 自車両
200 先行車
300 路側物
【技術分野】
【0001】
本発明は、先行車検出装置に関し、より特定的には、検出した先行車位置情報をフィルタ補正処理する先行車検出装置に関する。
【背景技術】
【0002】
従来、衝突防止や追従走行等の自車両の走行制御を実行するために、先行車の位置を検出する先行車検出装置が開発されている。このような先行車検出装置の一種として、電磁波等の搬送波を車両の周囲に照射し、当該搬送波が先行車に反射して成る反射波を受信することによって当該先行車の位置を検出するレーダー装置が知られている。このようなレーダー装置は、反射波の周波数、位相、および強度などの情報に基づいて先行車の位置を検出する。
【0003】
上記のようなレーダー装置によって先行車を継続的に追従検出する際、当該先行車における電磁波の照射箇所、すなわち反射する部材の形状や材質等が変化すると、同一先行車であっても反射波の情報が変化する場合がある。例えば、電磁波の照射箇所が樹脂製のバンパー、鋼板製のボディー、またはガラスの何れの部位で反射されるかによって反射波の情報が変化する。このような場合、例えば、実際には先行車が直進しており、横方向の位置が変化していない場合であっても、当該先行車が蛇行しているかのようにレーダー装置によって検出されてしまう場合がある。
【0004】
上記のような問題を解決すべく開発された先行車検出装置の一例が、特許文献1に開示されている。特許文献1に開示されるレーダー装置は、物体を検出した場合、当該物体と過去の検出物との同一性を判定する。そして、レーダー装置は、検出した物体を過去にも検出していた場合、当該物体の現時点の検出位置を当該物体の過去の検出位置に応じて補正するフィルタリング処理を行う。具体的には、当該レーダー装置は、検出物の現時点の検出位置と、過去の検出位置とを重み付け加算した結果を現時点の検出位置として算出する。このような処理によれば、当該物体の検出位置がばらつくことを防ぐことができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−183451号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、実際に検出物とレーダー装置との相対位置が変化している場合に上記のようなフィルタリング処理を実行すると、算出される検出物の位置の時間応答性が低下する虞があった。
【0007】
例えば、レーダー装置が車線変更している先行車を検出している場合を想定する。ここで、レーダー装置は、上記のフィルタリング処理を実行することによって、検出した現時点の先行車の位置を過去の検出位置に近づけるように補正してしまう。その結果、レーダー装置が算出した先行車の位置は、実際の先行車の位置に比べて時間的に遅れた位置を示すようになる。したがって、例えば、実際には先行車が移動先の車線への移動を完了した時点において、レーダー装置では、先行車が未だに車線変更中であるものとして検出される場合がある。
【0008】
そして、このような応答性の低下によって現時点における先行車の位置を正確に検出できない場合、当該位置情報を用いた自車両の走行制御を最適に実行できなくなる虞があった。
【0009】
本発明は上記の課題を鑑みて成されたものであり、従来に比して正確に先行車の位置を検出可能とする先行車検出装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記の課題を解決するため、本願は以下の構成を採用した。すなわち、第1の発明は、自車両の前方を走行する先行車の位置を検出する先行車検出装置であって、少なくとも先行車の左右方向の位置情報を検出する先行車位置検出手段と、現時点において検出した位置情報を補正するフィルタ補正手段と、先行車の走行状態を推定する先行車走行状態推定手段と、フィルタ補正手段による補正の度合いを、先行車走行状態推定手段によって推定された先行車の走行状態に応じて変更するフィルタ制御手段とを備える先行車検出装置である。
【0011】
第2の発明は、第1の発明において、先行車走行状態検出手段は、先行車が自車両が走行する自車走行車線から離脱中か否かを推定し、フィルタ制御手段は、先行車が自車走行車線から離脱中であると推定された場合、フィルタ補正手段による補正の度合いを先行車が自車走行車線から離脱中でないと推定された場合に比べて低くすることを特徴とする。
【0012】
第3の発明は、第2の発明において、自車走行車線に隣接する隣接車線が有るか否かを推定する隣接車線推定手段をさらに備え、離脱推定手段は、少なくとも隣接車線が有ると推定された場合に、先行車が離脱中であると推定することを特徴とする。
【0013】
第4の発明は、第2乃至3の何れか1つ発明において、自車両から自車両が走行する道路の路側物までの横方向の距離を路側物距離として検出する路側距離検出手段をさらに備え、隣接車線推定手段は、路側物距離に基づいて隣接車線の有無を推定することを特徴とする。
【0014】
第5の発明は、第4の発明において、自車走行車線と隣接車線との境界位置を推定する車線境界位置推定手段をさらに備え、隣接車線推定手段は、隣接車線が存在すると仮定した場合の当該隣接車線の車線幅を路側物距離および境界位置に基づいて推定し、(A)当該車線幅が所定の車線幅閾値以上である場合、隣接車線が有ると判定し、(B)当該車線幅が所定の車線幅閾値未満である場合、隣接車線が無いと判定することを特徴とする。
【0015】
第6の発明は、第5の発明において、先行車までの距離が長いほど、車線幅閾値の大きさを大きな値に変更する閾値変更手段をさらに備えることを特徴とする。
【0016】
第7の発明は、第3の発明において、自車両と並走する並走車を検出する並走車検出手段をさらに備え、隣接車線推定手段は、並走車を検出した場合、隣接車線が有ると判定することを特徴とする。
【0017】
第8の発明は、第3乃至7の何れか1つの発明において、先行車位置検出手段により検出された位置情報を記憶する記憶手段をさらに備え、先行車が左右何れの方向へ移動しているかを現在および過去の位置情報に基づいて算出する移動方向算出手段をさらに備え、隣接車線推定手段は、先行車の移動方向側に隣接車線が有るか否かを判定し、フィルタ制御手段は、フィルタ補正手段による補正の度合いを、先行車の移動方向側に隣接車線が有るか否かに応じて変更することを特徴とする。
【0018】
第9の発明は、第1乃至8の発明において、先行車位置検出手段により検出された位置情報を記憶する記憶手段をさらに備え、フィルタ補正手段は、現時点の位置情報と過去の位置情報とを各々所定のフィルタ係数に応じた重みを付けて加算することによって、当該現時点の位置情報を補正することを特徴とする。
【0019】
第10の発明は、第9の発明において、フィルタ制御手段は、隣接車線が有ると推定された場合、現時点の位置情報の重みが隣接車線が無いと推定された場合に比べて重くなるようフィルタ係数の値を変更することによって、当該補正の度合いを弱くするを特徴とする。
【発明の効果】
【0020】
第1の発明によれば、フィルタ補正手段による補正の度合いを、先行車の走行状態に応じて変更することができる。したがって、例えば、フィルタ補正手段による補正の度合いに応じて先行車の位置情報の検出応答速度が変化する場合に、先行車の走行状態に応じて適切な補正を行い、適切な応答速度で当該先行車の位置を検出することができる。故に、先行車の位置を正確に検出することが可能である。
【0021】
第2の発明によれば、先行車が自車走行車線から離脱中である場合に、フィルタ補正手段による補正の度合いを低くすることができる。したがって、先行車が自車走行車線から離脱中である場合、当該先行車の位置を応答性良く検出することができる。一方、先行車が自車走行車線を走行している間は、フィルタ補正手段による補正の度合いを低減することなく位置情報を補正し、当該位置情報のばらつきを低減することができる。
【0022】
第3の発明によれば、先行車が自車走行車線から離脱中であるか否かを隣接車線の有無に応じて正確に判定することができる。隣接車線が存在しない場合には、先行車は車線変更ができないため、離脱中でないと想定される。したがって、隣接車線の有無を勘案することによって、先行車が自車走行車線から離脱中であるか否かを、より正確に判定することができるのである。
【0023】
第4の発明によれば、路側物までの距離に基づいて隣接車線の有無を推定することができる。隣接車線が存在する場合には、前記自車両から前記自車両が走行する道路の路側物までの路側物距離が比較的長いと考えられる。したがって、路側物距離を用いることによって隣接車線の有無を容易に推定することができる。
【0024】
第5の発明によれば、隣接車線の車線幅を推定することによって、隣接車線の有無を正確に推定することができる。
【0025】
第6の発明によれば、隣接車線の有無をさらに正確に推定することができる。路側物距離は、自車両から遠方になるほど検出精度が低下する。すなわち、自車両から遠方になるほど、算出した隣接車線の車線幅に誤差が生じやすくなる。その点、第6の発明によれば、自車両から先行車までの距離に応じて車線幅閾値の値が設定されるため、このような誤差を許容して隣接車線の有無を推定することができる。
【0026】
第7の発明によれば、並走車の有無に応じて容易に隣接車線の有無を推定することができる。自車両と並走する並走車が存在する場合、隣接車線が存在すると考えられるため、当該並走車を検出することによって隣接車線の有無を推定可能である。
【0027】
第8の発明によれば、先行車の移動方向についてのみ隣接車線の有無を判定し、当該判定結果に応じてフィルタ補正手段による補正の度合いを変更することができる。したがって自車走行車線の両側について隣接車線の有無を推定する必要が無く、少ない処理量で上記の効果を得ることができる。
【0028】
第9の発明によれば、先行車の位置情報がばらつくことを簡単な処理で防止することができる。例えば、直進している先行車を追従して継続的に検出している場合、反射箇所の変化等により先行車の横位置が瞬間的にずれて検出されたとしても、当該横位置を過去の横位置に近づけるように補正して検出位置とすることができる。
【0029】
第10の発明によれば、係数値を変更する簡単な処理で、容易に補正の度合いを変更することができる。
【図面の簡単な説明】
【0030】
【図1】先行車検出装置1の構成を示すブロック図の一例
【図2】第1の実施形態に係る位置情報処理ECU20が実行する処理の詳細を示すフローチャートの一例
【図3】マッピングされた先行車200の位置情報を示すイメージ図
【図4】位置情報処理ECU20が実行する先行車離脱判定処理の詳細を示すフローチャートの一例
【図5】車線幅閾値テーブルの概念を示す図
【図6】先行車200の実際の走行経路の一例を示す図
【図7】図6のように走行する先行車200を先行車検出装置1および従来のレーダー装置によって検出した結果を示した図
【図8】第2の実施形態に係る位置情報処理ECU20が実行する処理の詳細を示すフローチャートの一例
【発明を実施するための形態】
【0031】
(第1の実施形態)
以下、本発明の第1の実施形態に係る先行車検出装置1について説明する。先行車検出装置1は、車両に搭載され、当該車両の前方を走行する先行車の位置情報を検出、および当該位置情報の補正処理を行う装置である。以下では、先行車検出装置1が自車両100に搭載される例について説明する。
【0032】
先ず、図1を参照して先行車検出装置1のハードウェア構成について説明する。なお、図1は、先行車検出装置1の構成を示すブロック図の一例である。図1に示すように。先行車検出装置は、レーダー装置10、および位置情報処理ECU20を備える。
【0033】
レーダー装置10は、自車両100の周囲の物体の位置情報を検出する装置である。レーダー装置10は、典型的にはFM−CW方式のミリ波レーダー装置である。レーダー装置10は、位置情報処理ECU20と電気的に接続され、検出した物体の位置情報を位置情報処理ECU20へ送信する。レーダー装置10は、例えば、フロントグリルやフロントバンパー等の自車両100の前方に搭載され、自車両100の前方および前側方の物体を検出する。
【0034】
位置情報処理ECU20は、典型的には、CPU(Central Processing Unit:中央処理装置)などの情報処理装置、メモリなどの記憶装置、およびインターフェース回路などを備える制御装置である。位置情報処理ECU20は、レーダー装置10から受信した物体の位置情報を必要に応じてフィルタ補正処理し、最終的に得られた物体の位置情報を自車両100に搭載された車両制御装置50へ送信する。
【0035】
車両制御装置50は、自車両100の走行を制御する装置である。車両制御装置50は、例えば、位置情報処理ECU20から受信した検出物の位置情報に基づいて、当該検出物と自車両100との衝突を予測し、当該衝突を回避すべく自車両100のブレーキを自動的に動作させる。
【0036】
次いで、図2を参照して、位置情報処理ECU20が実行する処理について説明する。図2は、第1の実施形態に係る位置情報処理ECU20が実行する処理の詳細を示すフローチャートの一例である。位置情報処理ECU20は、自車両100のIG電源がオン状態に設定されると、図2のフローチャートの処理を実行する。位置情報処理ECU20は、図2のフローチャートの処理を開始すると、先ず、ステップA1の処理を実行する。
【0037】
ステップA1において、位置情報処理ECU20は、先行車200を検出したか否か判定する。位置情報処理ECU20は、例えば、レーダー装置10から取得した物体の位置情報に基づいて、自車両100の進行方向と同一方向へ所定の速度以上で移動する物体を自車両100の前方において所定時間以上継続して検出した場合、当該物体を先行車200として検出する。位置情報処理ECU20は、先行車200を検出したと判定した場合、処理をステップA2へ進める。一方、位置情報処理ECU20は、先行車200を検出していないと判定した場合、処理をステップA8へ進める。
【0038】
なお、ステップA1において、位置情報処理ECU20は、検出した先行車200の位置を、仮想空間上にマッピングする。例えば、位置情報処理ECU20は、図3に示すように、自車両100を原点とし、自車両100の進行方向を示す軸線をY軸、自車両100の左右方向を示す軸線をX軸とする座標系に先行車200の位置情報をマッピングする。なお、図3は、マッピングされた先行車200の位置情報を示すイメージ図である。図3に示す通り、自車両100から前方へ離れるほどY座標の値が大きくなり、自車両100から見て右へ離れる程、X座標の値が大きくなる。以下では当該マップにおける先行車200の横位置情報(X座標)を検出横位置P(n)と呼称する。また、先行車200の縦位置情報(Y座標)を検出縦位置Q(n)と呼称する。なお、検出横位置P(n)および検出縦位置Q(n)の添え字のnは、現在時刻を表し、n−1,n−2,…は各々、1サンプリング時間前、2サンプリング時間前、…の時刻を示す。すなわち、P(n)は、現時点の先行車200の検出横位置を示し、P(n−1)は、1サンプリング前の先行車200の検出横位置を示す。また、上記の先行車200の検出方法、およびマッピングの方法は一例であり、位置情報処理ECU20は、従来周知の任意の手法を用いてこれらの処理を行って構わない。
【0039】
ステップA2において、位置情報処理ECU20は、先行車離脱判定処理を実行する。先行車離脱判定処理は、自車両100の前方を走行する先行車200が自車両100の走行車線(以下、自車走行車線と呼称する)から離脱中であるか否かを推定する処理である。位置情報処理ECU20は、先行車離脱判定処理において、先行車が自車走行車線から離脱中であると推定した場合、離脱フラグをオン状態に設定し、先行車が自車走行車線から離脱中でないと推定した場合、離脱フラグをオフ状態に設定する。離脱フラグは、位置情報処理ECU20の記憶装置に記憶されるフラグデータである。以下、図4を参照し、先行車離脱判定処理の詳細について説明する。図4は、位置情報処理ECU20が実行する先行車離脱判定処理の詳細を示すフローチャートの一例である。位置情報処理ECU20は、先行車離脱判定処理を開始すると、先ず、ステップA21の処理を実行する。
【0040】
ステップA21において、位置情報処理ECU20は、左隣接車線境界Lth_Lおよび右隣接車線境界Lth_Rを算出する。左隣接車線境界Lth_Lは、自車走行車線と、自車走行車線の左側の隣接車線(以下、左隣接車線と呼称する)との境界線の推定位置である。右隣接車線境界Lth_Rは、自車走行車線と、自車走行車線の右側の隣接車線(以下、右隣接車線と呼称する)との境界線の予想位置である。すなわち、左隣接車線境界Lth_Lおよび右隣接車線境界Lth_Rは、各々、自車走行車線の左端および右端の推定位置を示す。位置情報処理ECU20は、図2において示したXY座標系において予め定められた関数FLに基づいて左隣接車線境界Lth_Lを、関数FRに基づいて右隣接車線境界Lth_Rを各々算出する。具体的には、位置情報処理ECU20は、ステップA1において検出した先行車200の検出縦位置Q(n)を関数FLへ入力して得られる出力値を左隣接車線境界Lth_Lとして算出する。同様に位置情報処理ECU20は、ステップA1において検出した先行車200の検出縦位置Q(n)を関数FRへ入力して得られる出力値を右隣接車線境界Lth_Rとして算出する。このような処理により、位置情報処理ECU20は、先行車200の近傍における車線の境界位置を予測する。位置情報処理ECU20は、ステップA21の処理を完了すると、処理をステップA22へ進める。
【0041】
ステップA22において、位置情報処理ECU20は検出横位置P(n)が自車走行車線外に存在するか否か推定する。具体的には、先ず、位置情報処理ECU20は、検出横位置P(n)が左隣接車線境界Lth_Lより外側(左隣接車線側)に存在するか否か判定する。より詳細には、位置情報処理ECU20は、検出横位置P(n)の絶対値が左隣接車線境界Lth_Lの絶対値より大きいか否かを式(1)に基づいて判定する。
|P(n)|>|Lth_L| …(1)
次いで、位置情報処理ECU20は、検出横位置P(n)が右隣接車線境界Lth_Rより外側(右隣接車線側)に存在するか否か判定する。具体的には、位置情報処理ECU20は、検出横位置P(n)の絶対値が右隣接車線境界Lth_Rの絶対値より大きいか否かを式(2)に基づいて判定する。
|P(n)|>|Lth_R| …(2)
そして、位置情報処理ECU20は、検出横位置P(n)の絶対値が左隣接車線境界Lth_Lの絶対値より大きい場合、または、右隣接車線境界Lth_Rの絶対値より大きい場合、検出横位置P(n)が自車走行車線外に存在すると推定し、処理をステップA23へ進める。一方、位置情報処理ECU20は、検出横位置P(n)の絶対値が左隣接車線境界Lth_Lの絶対値以下であり、且つ、右隣接車線境界Lth_Rの絶対値以下である場合、検出横位置P(n)が自車走行車線内に存在していると推定し、処理をステップA31へ進める。
【0042】
ステップA23において、位置情報処理ECU20は、前回サンプリング時点の出力横位置Pout(n−1)が自車走行車線内に存在していたか否か推定する。出力横位置Pout(n)は、後述の位置情報処理ECU20の処理によって最終的に算出された先行車200の横位置情報である。具体的には、先ず、位置情報処理ECU20は、前回の出力横位置Pout(n−1)が左隣接車線境界Lth_Lより内側(自車走行車線側)に存在するか否か判定する。より詳細には、位置情報処理ECU20は、前回の出力横位置Pout(n−1)の絶対値が左隣接車線境界Lth_Lの絶対値より小さいか否かを式(3)に基づいて判定する。
|Lth_L|>Pout(n−1) …(3)
次いで、位置情報処理ECU20は、前回の出力横位置Pout(n−1)が右隣接車線境界Lth_Rより内側(自車走行車線側)に存在するか否か判定する。具体的には、位置情報処理ECU20は、前回の出力横位置Pout(n−1)の絶対値が右隣接車線境界Lth_Rの絶対値より小さいか否かを式(4)に基づいて判定する。
|Lth_R|>Pout(n−1) …(4)
そして、位置情報処理ECU20は、前回サンプリング時点の出力横位置Pout(n−1)の絶対値が左隣接車線境界Lth_Lの絶対値より小さく、且つ、出力横位置Pout(n−1)の絶対値が右隣接車線境界Lth_Rの絶対値より小さい場合、前回サンプリング時点の出力横位置Pout(n−1)が自車走行車線内に存在していたと推定し、処理をステップA24へ進める。一方、位置情報処理ECU20は、出力横位置Pout(n−1)の絶対値が左隣接車線境界Lth_Lの絶対値以上である場合、または、出力横位置Pout(n−1)の絶対値が右隣接車線境界Lth_Rの絶対値以上である場合、出力横位置Pout(n−1)が自車走行車線内に存在していなかったと推定し、処理をステップA31へ進める。
【0043】
上述ステップA21からステップA23の処理は、先行車が自車走行車線から隣接車線へ離脱しているか否かを先行車200の位置情報に基づいて推定する処理である。過去に自車走行車線内に存在していた先行車200の位置が、現時点において隣接車線へ移動している場合、先行車200が自車走行車線から離脱中であると考えられる。このような観点から、位置情報処理ECU20は、ステップA21からステップA23を実行することによって先行車200が自車走行車線から離脱中であるか否かを判定することができる。
【0044】
ステップA24において、位置情報処理ECU20は、先行車200が自車走行車線から左右何れの方向へ離脱中であるか推定する。以下、先行車200が離脱している方向を離脱方向と呼称する。例えば、位置情報処理ECU20は、検出横位置P(n)が前回の出力横位置Pout(n)より大きい場合、先行車200が右方向へ離脱中であると推定し、検出横位置P(n)が前回の出力横位置Pout(n)より小さい場合、先行車200が左方向へ離脱中であると推定する。ステップA24の処理を完了すると、位置情報処理ECU20は、処理をステップA25へ進める。
【0045】
ステップA25において、位置情報処理ECU20は、並走車を検出したか否か判定する。位置情報処理ECU20は、例えば、自車両100の前側方を所定速度以上で自車両100と同方向へ進行する物体を検出した場合、当該物体を並走車として検出する。なお、上記の手法は一例であり、位置情報処理ECU20は、従来周知の手法を用いて並走車を検出しても構わない。位置情報処理ECU20は、並走車を検出したと判定した場合、処理をステップA30へ進める。一方、位置情報処理ECU20は、並走車を検出していないと判定した場合、処理をステップA26へ進める。
【0046】
上述ステップA25の処理は、先行車200が自車走行車線から隣接車線へ離脱中か否かを自車両100の並走車の有無に基づいて推定する処理である。自車両100の並走車が先行車200の離脱方向側に存在する場合、先行車200の移動先に隣接車線が存在すると考えられる。すなわち、先行車200が自車走行車線から離脱可能であると考えられる。したがって、上記ステップA25の処理によれば、位置情報処理ECU20は、自車走行車線から隣接車線へ離脱中か否かを、より正確に判定することができる。
【0047】
ステップA26において、位置情報処理ECU20は、路側物300を検出したか否か判定する。具体的には、位置情報処理ECU20は、例えば、自車両100から見て先行車200の離脱方向側に、自車走行車線に沿って静止物を連続的に検出した場合、当該物体をガードレール等の路側物300として検出する。例えば、図3に示すマップのX=−8〜−6、Y=0〜100の領域において静止物を連続して検出した場合、当該検出点を直線近似または曲線近似し、当該近似線を路側物300として検出する。なお、上記の手法は一例であり、位置情報処理ECU20は従来周知の任意の手法を用いて路側物300を検出および認識して構わない。位置情報処理ECU20は、路側物300を検出したと判定した場合、処理をステップA27へ進める。一方、位置情報処理ECU20は、路側物300を検出していないと判定した場合、処理をステップA31へ進める。
【0048】
ステップA27において、位置情報処理ECU20は、隣接車線幅Wを算出する。隣接車線幅Wは、先行車200が離脱しようとしている隣接車線の幅を示す値である。具体的には、先ず、位置情報処理ECU20は、ステップA26において検出した路側物300の図3のマップにおけるX座標を路側物位置Lgとして算出する。当該路側物位置Lgは、自車両100から路側物300までの横方向の距離を示す値である。路側物300までの横方向の距離は、次いで、位置情報処理ECU20は、路側物位置Lgから路側物300が存在する方向側の隣接車線境界の値を減算して隣接車線幅Wを算出する。例えば、先行車200が自車走行車線から左側へ離脱中である場合、位置情報処理ECU20は、路側物位置Lgから左隣接車線境界Lth_Lの値を減算して隣接車線幅Wを算出する。位置情報処理ECU20は、ステップA27の処理を完了すると、処理をステップA28へ進める。
【0049】
ステップA28において、位置情報処理ECU20は、車線幅閾値Wthを算出する。具体的には、位置情報処理ECU20は、検出縦位置Q(n)および車線幅閾値テーブルに基づいて車線幅閾値Wthを算出する。車線幅閾値テーブルは、車線幅閾値Wthと検出縦位置Q(n)との関係を示すデータテーブルである。図5は、車線幅閾値テーブルの概念を示す図である。図5に示すように、車線幅閾値テーブルは、列毎に検出縦位置Q(n)および車線幅閾値Wthの値が各々並べられたテーブルである。当該テーブルにおいて、1列目には検出縦位置Q(n)の値が示され、2列目には各検出縦位置Q(n)の値と対応する車線幅閾値Wthの値が示される。位置情報処理ECU20は、車線幅閾値テーブルの1列目において、ステップA12において取得した検出縦位置Q(n)の値に対応する行を探索する。そして、位置情報処理ECU20は、探索した行と同じ行の2列目に記された車線幅閾値Wthの値を検出縦位置Q(n)に対応する車線幅閾値Wthの値として算出する。そして、図5に示す車線幅閾値テーブルによれば、検出縦位置Q(n)が大きいほど車線幅閾値Wthの値が大きな値として算出される。位置情報処理ECU20は、ステップA28の処理を完了すると、処理をステップA29へ進める。
【0050】
ステップA29において、位置情報処理ECU20は、隣接車線幅Wが車線幅閾値Wth以上か否か判定する。位置情報処理ECU20は、隣接車線幅Wが車線幅閾値Wth以上であると判定した場合、処理をステップA30へ進める。一方、位置情報処理ECU20は、隣接車線幅Wが車線幅閾値Wthより小さいと判定した場合、処理をステップA31へ進める。
【0051】
上述ステップA26からステップA29の処理は、先行車200が自車走行車線から隣接車線へ離脱しているか否かを路側物300の位置情報に基づいて推定する処理である。自車両100から路側物300までの横方向の距離が比較的短い場合、すなわち、隣接車線幅が比較的狭い場合、隣接車線が存在していないと考えられる。そして、隣接車線が存在しない場合には、仮に上述ステップA21からステップA23の処理において先行車200が隣接車線へ移動していると推定されていたとしても、実際には先行車200は隣接車線へ移動不可能であるから、当該先行車200は自車走行車線から離脱していないと考えられる。このような観点から、位置情報処理ECU20は、上述ステップA26からステップA29の処理を実行することによって、先行車200が自車走行車線から離脱しているか否かをより正確に推定することができる。
【0052】
また、上記ステップA24からステップA29の処理では、先行車200の離脱方向側についてのみ隣接車線の有無を推定するため、離脱方向と逆側の隣接車線については、その有無を推定しなくて良い。すなわち、これらの処理によれば位置情報処理ECU20の処理量を低減することが可能である。なお、このような処理量の低減が不要である場合は、位置情報処理ECU20は、自車走行車線の両側について隣接車線の有無を推定して構わない。
【0053】
ステップA30において、位置情報処理ECU20は、離脱フラグをオン状態に設定する。離脱フラグは、上述の通り、オン状態である場合に先行車200が自車走行車線から離脱中であることを示すフラグデータである。位置情報処理ECU20は、ステップA30の処理を完了すると、処理をステップA図2のステップA3へ進める。
【0054】
ステップA31において、位置情報処理ECU20は、離脱フラグをオフ状態に設定する。位置情報処理ECU20は、ステップA31の処理を完了すると、処理を図2のステップA3へ進める。
【0055】
なお、上述ステップA26からステップA29までの処理では、位置情報処理ECU20が、先行車200が自車走行車線から離脱中であるか否かを、路側物位置Lgに基づいて算出した隣接車線幅Wの値に応じて判定する例について説明したが、位置情報処理ECU20は、先行車200が自車走行車線から離脱中であるか否かを路側物位置Lgの大きさに応じて直接的に判定しても構わない。例えば、位置情報処理ECU20は、路側物位置Lgが予め定められた閾値以上である場合、離脱フラグをオン状態に設定し、路側物位置Lgが予め定められた閾値未満である場合、離脱フラグをオフ状態に設定しても構わない。このような処理によれば、位置情報処理ECU20は、隣接車線幅Wを算出する処理を省略することができるので、比較的少ない処理量で先行車200が自車走行車線から離脱中であるか否かを判定することができる。
【0056】
図2の説明に戻り、ステップA3において、位置情報処理ECU20は、離脱フラグがオン状態であるか否か判定する。位置情報処理ECU20は、離脱フラグがオン状態であると判定した場合、処理をステップA4へ進める。一方、位置情報処理ECU20は、離脱フラグがオフ状態であると判定した場合、処理をステップA5へ進める。
【0057】
ステップA4において、位置情報処理ECU20は、検出横位置P(n)の値を出力横位置Pout(n)として設定する。出力横位置Pout(n)は、最終的に先行車検出装置1から車両制御装置50へ出力される先行車の横位置情報である。位置情報処理ECU20は、ステップA4の処理を完了すると、処理をステップA7へ進める。
【0058】
ステップA5において、位置情報処理ECU20は、フィルタ処理を実行する。具体的には、位置情報処理ECU20は、式(5)に示すように、現時点の検出横位置P(n)と過去の出力横位置Pout(n−1)とを各々フィルタ係数kに応じた重みを付けて加算することによって、フィルタ補正位置Pft(n)を算出する。
Pft(n)=(1−k)×Pout(n―1)+k×P(n) …(5)
なお、第1の実施形態においては、フィルタ係数kの値は位置情報処理ECU20の記憶装置に予め記憶された任意の定数とする。位置情報処理ECU20は、ステップA5の処理を完了すると、処理をステップA6へ進める。
【0059】
ステップA6において、位置情報処理ECU20は、フィルタ補正位置Pft(n)の値を出力横位置Pout(n)として設定する。位置情報処理ECU20は、ステップA6の処理を完了すると、処理をステップA7へ進める。
【0060】
ステップA7において、位置情報処理ECU20は、Pout(n)を出力する。位置情報処理ECU20は、ステップA7の処理を完了すると、処理をステップA8へ進める。
【0061】
ステップA8において、位置情報処理ECU20は、IG電源がオフに設定されたか否か判定する。位置情報処理ECU20は、IG電源がオフに設定されたと判定した場合、図2のフローチャートの処理を終了する。一方、位置情報処理ECU20は、IG電源がオン状態であると判定した場合、処理をステップA1へ戻す。
【0062】
上記に示した位置情報処理ECU20の処理によれば、先行車200が自車走行車線から離脱中であると推定された場合、フィルタ補正処理をしていない検出横位置P(n)の値がそのまま出力横位置Pout(n)として車両制御装置50へ出力される。一方、先行車200が自車走行車線から離脱中でないと推定された場合、フィルタ補正処理後のフィルタ補正位置Pft(n)の値が出力横位置Pout(n)として車両制御装置50へ出力される。
【0063】
次いで、図6および図7を参照して、上述の先行車検出装置1によって先行車200の位置が好適に検出される様子について説明する。以下、先行車200が、自車走行車線から左側の隣接車線へ離脱して走行する場合を例として説明する。
【0064】
図6は、先行車200の実際の走行経路の一例を示す図である。図6に示すように、先行車200は、時刻t1から時刻t3にかけて自車走行車線を直進し、時刻t3から時刻t5にかけて隣接車線へ車線変更し、時刻t5から時刻t6にかけて隣接車線を直進する。
【0065】
図7は、図6のように走行する先行車200を先行車検出装置1および従来のレーダー装置によって検出した結果を示した図である。図7に示すように、ステップA5のようなフィルタ補正処理を実行しない従来のレーダー装置によって先行車200を検出した場合、時刻t3、および時刻t6の時点のように実際の先行車200の位置に対してずれた位置に先行車200が存在するものとして検出してしまう(図7中、菱形プロット参照)。
【0066】
ステップA5のようなフィルタ補正処理を常時実行する従来のレーダー装置によって先行車200を検出した場合、フィルタ補正処理により時刻t3および時刻t6の時点における検出位置のばらつきを抑制することができるため、先行車200が直進している間は、上述フィルタ補正処理を実行しない従来のレーダー装置に比べて先行車200の位置を正確に検出することができる。しかしながら、フィルタ補正処理を常時実行する従来のレーダー装置は、先行車200が車線変更を行っている間にもフィルタ補正処理を実行するため、この間、現時点の検出横位置を前回の検出横位置方向へずらしてしまう。そのため、フィルタ補正処理を常時実行する従来のレーダー装置は、時刻t4から時刻t6にかけて、実際の先行車200の位置に対して時間的にずれた位置に当該先行車200が存在するものとして検出してしまう(図7中、正方形プロット参照)。
【0067】
一方、本発明に係る先行車検出装置1によれば、先行車200が直進している間はフィルタ補正処理後のフィルタ補正位置Pft(n)の値を出力値とするため、時刻t3および時刻t6の時点における検出位置のばらつきを抑制することができる。また、先行車検出装置1は、先行車200が車線変更を行っている間はフィルタ補正処理を行っていない検出横位置P(n)を出力値とするため、時刻t4から時刻t6にかけて高い応答性で先行車200の横位置を正確に検出することが可能である。
【0068】
以上に示した通り、本発明の第1の実施形態に係る先行車検出装置1によれば、フィルタ補正処理による補正の度合いを、先行車200の走行状態に応じて変更することができる。したがって、先行車200の走行状態に応じて適切な応答速度で当該先行車の位置を検出し、先行車の位置を正確に検出することが可能である。
【0069】
なお、上記第1の実施形態では、先行車が自車走行車線から離脱していないと判定された場合にのみフィルタ処理を実行する例について説明したが、位置情報処理ECU20はステップA3の判定内容に関わらず、先行車の位置を検出する毎にフィルタ処理を実行しても構わない。すなわち、位置情報処理ECU20は、ステップA5の処理を、例えばステップA1の処理後、ステップA2の処理前に実行しても構わない。このような処理を行う場合、位置情報処理ECU20は、ステップA3において先行車が離脱していないと判定した際に処理をステップA6へ進める。位置情報処理ECU20は、このような処理を行った場合においても、先行車200が自車走行車線から離脱しているか否かに応じてP(n)の値、またはPft(n)の値を適宜選択してPout(n)の値を決定することが可能である。
【0070】
(第2の実施形態)
上記第1の実施形態では、位置情報処理ECU20が、先行車200が自車走行車線から離脱するか否かに応じてフィルタ補正処理の実行/停止状態を制御する例について説明したが、位置情報処理ECU20は、先行車200が自車走行車線から離脱するか否かに応じてフィルタ補正処理の補正の度合いを変更しつつ、常時フィルタ補正処理を実行する制御を行っても構わない。以下、第2の実施形態に係る先行車検出装置について説明する。なお、第2の実施形態に係る先行車検出装置のハードウェア構成は図1に示す第1の実施形態と同様であるため、詳細な説明を省略する。
【0071】
以下、第2の実施形態に係る位置情報処理ECU20が実行する処理について図8を参照して説明する。なお、図8は、第2の実施形態に係る位置情報処理ECU20が実行する処理の詳細を示すフローチャートの一例である。図8に示す処理において、図2と同様の処理を行うステップについては同様の符号を付し、詳細な説明を省略する。
【0072】
位置情報処理ECU20は、図8の処理を開始すると、図2と同様にステップA1からステップA3の処理を実行する。ここで、第2の実施形態に係る位置情報処理ECU20は、ステップA3において離脱フラグがオン状態であると判定した場合、処理をステップB2へ進める。一方、位置情報処理ECU20は、離脱フラグがオフ状態であると判定した場合、処理をステップB1へ進める。
【0073】
ステップB1において位置情報処理ECU20は、フィルタ係数kの値を通常値αに設定する。通常値αは、位置情報処理ECU20の記憶装置に予め記憶された任意の定数である。位置情報処理ECU20は、ステップB1の処理を完了すると、処理をステップA5へ進める。
【0074】
ステップB2において位置情報処理ECU20は、フィルタ係数kの値を変更値βに設定する。変更値βは、位置情報処理ECU20の記憶装置に予め記憶された任意の定数である。位置情報処理ECU20は、ステップB2の処理を完了すると、処理をステップA5へ進める。
【0075】
上記第2の実施形態に係る位置情報処理ECU20によれば、先行車200が自車走行車線から離脱している場合、フィルタ係数kの大きさを先行車200が自車走行車線から離脱していない場合に比べて小さな値に変更される。すなわち、先行車200が自車走行車線から離脱している場合、過去の出力横位置Pout(n−1)より現時点の検出横位置P(n)の重みを比較的大きくして、フィルタ補正位置Pft(n)を算出することができる。つまり、第2の実施形態に係る位置情報処理ECU20は、先行車200が自車走行車線から離脱中である場合、先行車200が自車走行車線から離脱中でない場合に比べてフィルタ補正の度合いを弱くし、応答性を高くすることができる。
【0076】
以上に示した通り、第2の実施形態に係る先行車検出装置によれば、第1の実施形態と同様に、先行車200が自車走行車線から離脱中であるか否かに応じてフィルタ補正処理を制御し、先行車200の位置を正確に検出することができる。また、第2の実施形態に係る先行車検出装置によれば、先行車200が自車走行車線から離脱している間、完全にフィルタ補正処理を停止することなく、所定の度合いでフィルタ補正処理の効果を得ることが可能である。
【0077】
なお、上記各実施形態では、位置情報処理ECU20が、先行車200が自車走行車線から隣接車線へ離脱中にフィルタ補正処理を抑制する例について説明したが、位置情報処理ECU20は、先行車200が隣接車線から自車走行車線へ進入している際にフィルタ補正処理を抑制する制御を行っても構わない。例えば、位置情報処理ECU20は、過去に隣接車線に存在していた先行車200の位置が、現時点において自車走行車線内へ移動している場合にフィルタ補正処理を抑制しても構わない。また、位置情報処理ECU20は、先行車200が自車両100から見て左右方向に移動している場合に、フィルタ補正処理を抑制して構わない。
【0078】
また、上記各実施形態では、レーダー装置10によって先行車200の位置および路側物300の位置を検出する例について説明したが、自車両の周囲の物体の位置情報を検出可能な装置であれば、レーダー装置に限らず任意の装置を用いて先行車200の位置および路側物300の位置を検出しても構わない。例えば、本発明に係る先行車検出装置は、レーダー装置10の代わりにカメラ装置を搭載する構成としても構わない。このような構成とした先行車検出装置によっても、位置情報処理ECU20が実行する処理によって上述と同様の効果を得ることが可能である。
【産業上の利用可能性】
【0079】
本発明に係る先行車検出装置は、従来に比して正確に先行車の位置を検出可能な先行車検出装置などとして有用である。
【符号の説明】
【0080】
1 先行車検出装置
10 レーダー装置
20 位置情報処理ECU
50 車両制御装置
100 自車両
200 先行車
300 路側物
【特許請求の範囲】
【請求項1】
自車両の前方を走行する先行車の位置を検出する先行車検出装置であって、
少なくとも前記先行車の左右方向の位置情報を検出する先行車位置検出手段と、
現時点において検出した前記位置情報を補正するフィルタ補正手段と、
前記先行車の走行状態を推定する先行車走行状態推定手段と、
前記フィルタ補正手段による補正の度合いを、前記先行車走行状態推定手段によって推定された前記先行車の走行状態に応じて変更するフィルタ制御手段とを備える、先行車検出装置。
【請求項2】
前記先行車走行状態検出手段は、前記先行車が前記自車両が走行する自車走行車線から離脱中か否かを推定し、
前記フィルタ制御手段は、前記先行車が前記自車走行車線から離脱中であると推定された場合、前記フィルタ補正手段による補正の度合いを前記先行車が前記自車走行車線から離脱中でないと推定された場合に比べて低くすることを特徴とする、請求項1に記載の先行車検出装置。
【請求項3】
前記自車走行車線に隣接する隣接車線が有るか否かを推定する隣接車線推定手段をさらに備え、
前記離脱推定手段は、少なくとも前記隣接車線が有ると推定された場合に、前記先行車が離脱中であると推定することを特徴とする、請求項2に記載の先行車検出装置。
【請求項4】
前記自車両から前記自車両が走行する道路の路側物までの横方向の距離を路側物距離として検出する路側距離検出手段をさらに備え、
前記隣接車線推定手段は、前記路側物距離に基づいて前記隣接車線の有無を推定することを特徴とする、請求項2乃至3の何れか1つに記載の先行車検出装置。
【請求項5】
前記自車走行車線と前記隣接車線との境界位置を推定する車線境界位置推定手段をさらに備え、
前記隣接車線推定手段は、前記隣接車線が存在すると仮定した場合の当該隣接車線の車線幅を前記路側物距離および前記境界位置に基づいて推定し、(A)当該車線幅が所定の車線幅閾値以上である場合、前記隣接車線が有ると判定し、(B)当該車線幅が所定の車線幅閾値未満である場合、前記隣接車線が無いと判定することを特徴とする、請求項4に記載の先行車検出装置。
【請求項6】
前記先行車までの距離が長いほど、前記車線幅閾値の大きさを大きな値に変更する閾値変更手段をさらに備えることを特徴とする、請求項5に記載の先行車検出装置。
【請求項7】
前記自車両と並走する並走車を検出する並走車検出手段をさらに備え、
前記隣接車線推定手段は、前記並走車を検出した場合、前記隣接車線が有ると判定することを特徴とする、請求項3に記載の先行車検出装置。
【請求項8】
先行車位置検出手段により検出された前記位置情報を記憶する記憶手段をさらに備え、
前記先行車が左右何れの方向へ移動しているかを現在および過去の前記位置情報に基づいて算出する移動方向算出手段をさらに備え、
前記隣接車線推定手段は、前記先行車の移動方向側に前記隣接車線が有るか否かを判定し、
前記フィルタ制御手段は、前記フィルタ補正手段による補正の度合いを、前記先行車の移動方向側に前記隣接車線が有るか否かに応じて変更することを特徴とする、請求項3乃至7の何れか1つに記載の先行車検出装置。
【請求項9】
先行車位置検出手段により検出された前記位置情報を記憶する記憶手段をさらに備え、
前記フィルタ補正手段は、現時点の前記位置情報と、過去の前記位置情報とを各々所定のフィルタ係数に応じた重みを付けて加算することによって、当該現時点の位置情報を補正することを特徴とする、請求項1乃至8の何れか1つに記載の物体検出手段。
【請求項10】
前記フィルタ制御手段は、前記隣接車線が有ると推定された場合、現時点の前記位置情報の重みが前記隣接車線が無いと推定された場合に比べて重くなるよう前記フィルタ係数の値を変更することによって、当該補正の度合いを弱くするを特徴とする、請求項9に記載の物体検出手段。
【請求項1】
自車両の前方を走行する先行車の位置を検出する先行車検出装置であって、
少なくとも前記先行車の左右方向の位置情報を検出する先行車位置検出手段と、
現時点において検出した前記位置情報を補正するフィルタ補正手段と、
前記先行車の走行状態を推定する先行車走行状態推定手段と、
前記フィルタ補正手段による補正の度合いを、前記先行車走行状態推定手段によって推定された前記先行車の走行状態に応じて変更するフィルタ制御手段とを備える、先行車検出装置。
【請求項2】
前記先行車走行状態検出手段は、前記先行車が前記自車両が走行する自車走行車線から離脱中か否かを推定し、
前記フィルタ制御手段は、前記先行車が前記自車走行車線から離脱中であると推定された場合、前記フィルタ補正手段による補正の度合いを前記先行車が前記自車走行車線から離脱中でないと推定された場合に比べて低くすることを特徴とする、請求項1に記載の先行車検出装置。
【請求項3】
前記自車走行車線に隣接する隣接車線が有るか否かを推定する隣接車線推定手段をさらに備え、
前記離脱推定手段は、少なくとも前記隣接車線が有ると推定された場合に、前記先行車が離脱中であると推定することを特徴とする、請求項2に記載の先行車検出装置。
【請求項4】
前記自車両から前記自車両が走行する道路の路側物までの横方向の距離を路側物距離として検出する路側距離検出手段をさらに備え、
前記隣接車線推定手段は、前記路側物距離に基づいて前記隣接車線の有無を推定することを特徴とする、請求項2乃至3の何れか1つに記載の先行車検出装置。
【請求項5】
前記自車走行車線と前記隣接車線との境界位置を推定する車線境界位置推定手段をさらに備え、
前記隣接車線推定手段は、前記隣接車線が存在すると仮定した場合の当該隣接車線の車線幅を前記路側物距離および前記境界位置に基づいて推定し、(A)当該車線幅が所定の車線幅閾値以上である場合、前記隣接車線が有ると判定し、(B)当該車線幅が所定の車線幅閾値未満である場合、前記隣接車線が無いと判定することを特徴とする、請求項4に記載の先行車検出装置。
【請求項6】
前記先行車までの距離が長いほど、前記車線幅閾値の大きさを大きな値に変更する閾値変更手段をさらに備えることを特徴とする、請求項5に記載の先行車検出装置。
【請求項7】
前記自車両と並走する並走車を検出する並走車検出手段をさらに備え、
前記隣接車線推定手段は、前記並走車を検出した場合、前記隣接車線が有ると判定することを特徴とする、請求項3に記載の先行車検出装置。
【請求項8】
先行車位置検出手段により検出された前記位置情報を記憶する記憶手段をさらに備え、
前記先行車が左右何れの方向へ移動しているかを現在および過去の前記位置情報に基づいて算出する移動方向算出手段をさらに備え、
前記隣接車線推定手段は、前記先行車の移動方向側に前記隣接車線が有るか否かを判定し、
前記フィルタ制御手段は、前記フィルタ補正手段による補正の度合いを、前記先行車の移動方向側に前記隣接車線が有るか否かに応じて変更することを特徴とする、請求項3乃至7の何れか1つに記載の先行車検出装置。
【請求項9】
先行車位置検出手段により検出された前記位置情報を記憶する記憶手段をさらに備え、
前記フィルタ補正手段は、現時点の前記位置情報と、過去の前記位置情報とを各々所定のフィルタ係数に応じた重みを付けて加算することによって、当該現時点の位置情報を補正することを特徴とする、請求項1乃至8の何れか1つに記載の物体検出手段。
【請求項10】
前記フィルタ制御手段は、前記隣接車線が有ると推定された場合、現時点の前記位置情報の重みが前記隣接車線が無いと推定された場合に比べて重くなるよう前記フィルタ係数の値を変更することによって、当該補正の度合いを弱くするを特徴とする、請求項9に記載の物体検出手段。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−232818(P2011−232818A)
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願番号】特願2010−100091(P2010−100091)
【出願日】平成22年4月23日(2010.4.23)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願日】平成22年4月23日(2010.4.23)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]