
先行車追従装置
【課題】 先行車追従制御を解除したときに無用な接近警報が発せられるのを防止する。
【解決手段】 先行車追従制御の解除操作がなされても、所定の追従制御終了条件を満たすまで先行車追従制御を継続する。
【解決手段】 先行車追従制御の解除操作がなされても、所定の追従制御終了条件を満たすまで先行車追従制御を継続する。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】本発明は、先行車との車間距離が目標値となるように車速を制御する先行車追従装置に関する。
【0002】
【従来の技術とその問題点】先行車との車間距離を計測し、先行車追従制御時(以下、単に制御時という)には先行車との車間距離が目標値となるように車速を制御する先行車追従制御機能と、先行車追従制御の解除時(以下、単に非制御時という)には車間距離が目標値より小さくなった場合に警告を行う接近警報機能とを備えた先行車追従装置が知られている。
【0003】この種の先行車追従装置では、制御時には、先行車との車間距離Dを計測し、車間距離Dが自車速Vfに基づいて設定された目標車間距離Doとなるように、スロットルバルブ、トランスミッション、ブレーキなどを制御するとともに、先行車との相対速度Vrと自車速Vfとに基づいて制御時の警報距離Daを設定し、車間距離DがDaよりも小さくなった場合に警報を発する。一方、非制御時には、自車速Vfと相対速Vrとに基づいて非制御時の警報距離Dwを設定し、車間距離DがDwより小さくなった場合に警報を発する。
【0004】しかしながら、従来の先行車追従装置では、制御時警報距離Daと非制御時警報距離DwがDa<Dwの関係に設定され、制御時に車間距離DがDa<D<Dwの関係を満たしているときに、先行車追従制御を解除するとただちに非制御時の警報が発せられてしまう、という問題がある。
【0005】本発明の目的は、先行車追従制御を解除したときに無用な接近警報が発せられるのを防止することにある。
【0006】
【課題を解決するための手段】一実施の形態の構成を示す図1に対応づけて本発明を説明すると、(1) 請求項1の発明は、先行車追従制御を設定または解除するための操作部材3と、先行車との車間距離を計測する車間距離計測手段1と、自車速を検出する自車速検出手段2とを備え、先行車追従制御の設定時には、車間距離計測値が目標値となるように自車速を制御するとともに、車間距離計測値が予め設定した第1の距離より小さくなったら警告し、先行車追従制御の解除時には、車間距離計測値が予め設定した第2の距離より小さくなったら警告する先行車追従装置に適用される。そして、操作部材3により先行車追従制御の解除操作がなされても、所定の追従制御終了条件を満たすまで先行車追従制御を継続する制御手段6を備えることにより、上記目的を達成する。
(2) 請求項2の先行車追従装置は、車間距離計測値が第2の設定距離以上とする条件を追従制御終了条件としたものである。
(3) 請求項3の先行車追従装置は、車間距離計測値の時間変化に基づいて先行車に対する自車の接近、非接近状況を判定する判定手段6を備え、先行車に対して自車が非接近状況にある条件を追従制御終了条件としたものである。
(4) 請求項4の先行車追従装置は、運転者の加速操作を検出する加速操作検出手段5を備え、運転者により加速操作が行われている条件を追従制御終了条件としたものである。
(5) 請求項5の先行車追従装置は、運転者の減速操作を検出する減速操作検出手段4を備え、運転者により減速操作が行われている条件を追従制御終了条件としたものである。
(6) 請求項6の先行車追従装置は、制御手段6によって、先行車追従制御の解除操作がなされたときに加速操作があると先行車追従制御を終了し、所定時間後に車間距離計測値と第2の設定距離による警告制御を開始するようにしたものである。
(7) 請求項7の先行車追従装置は、制御手段6によって、先行車追従制御の解除操作がなされたときに減速操作があると先行車追従制御を終了し、減速操作がなくなってから車間距離計測値と第2の設定距離による前記警告制御を開始するようにしたものである。
【0007】上述した課題を解決するための手段の項では、説明を分かりやすくするために一実施の形態の図を用いたが、これにより本発明が一実施の形態に限定されるものではない。
【0008】
【発明の効果】(1) 請求項1〜5の発明によれば、先行車追従制御の解除操作がなされても、所定の追従制御終了条件を満たすまで先行車追従制御を継続するようにしたので、先行車追従制御を解除したときに無用な接近警報が発せられるのを防止でき、運転者の戸惑いをなくすことができる。
(2) 請求項6の発明によれば、先行車追従制御の解除操作がなされたときに加速操作があると先行車追従制御を終了し、所定時間後に車間距離計測値と第2の設定距離による警告制御を開始するようにしたので、先行車追従制御を解除して先行車を追い越す場合などの無用な警報発生を防止できる。
(3) 請求項7の発明によれば、先行車追従制御の解除操作がなされたときに減速操作があると先行車追従制御を終了し、減速操作がなくなってから車間距離計測値と第2の設定距離による前記警告制御を開始するようにしたので、先行車追従制御を解除してブレーキ操作を行う時の無用な警報発生を防止できる。
【0009】
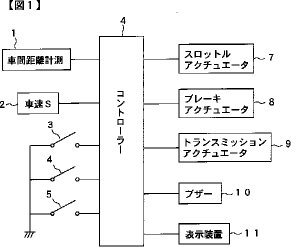
【発明の実施の形態】図1は一実施の形態の構成を示す図である。車間距離計測装置1は自車と同一車線上を走行する先行車を認識し、先行車までの車間距離Dおよび自車と先行車との相対速Vrを計測する。この車間距離計測装置1には、赤外光レーザーを用いたレーザーレーダーや、電波を用いたミリ波レーダーなどを用いることができる。なお、自車と先行車との相対速度Vrは、例えば計測車間距離Dを時間微分して求められる。車速センサー2は自車の走行速度Vfを計測する。制御スイッチ3は先行車追従制御を設定(オン)または解除(オフ)するための操作部材であり、設定時には先行車追従制御機能と制御時の接近警報機能が働き、解除時には非制御時の接近警報機能が働く。ブレーキスイッチ4は運転者の減速操作を検出するためのスイッチであり、ブレーキペダルが踏み込まれるとオンする。また、アクセルスイッチ5は運転者の加速操作を検出するためのスイッチであり、アクセルペダルが踏み込まれるとオンする。
【0010】コントローラー6はマイクロコンピューターとその周辺部品から構成され、制御スイッチ3により先行車追従制御が設定されている時には、車間距離Dが自車速Vfに基づいて設定された目標値となるように、スロットルアクチュエーター7、ブレーキアクチュエーター8およびトランスミッションアクチュエーター9を制御するとともに、先行車との相対速度Vrと自車速Vfとに基づいて制御時の警報距離Daを設定し、車間距離DがDaよりも小さくなった場合に車間距離Dを目標値Doに制御できないおそれがあるとしてブザー10および表示装置11により警告する。また、制御スイッチ3により先行車追従制御が解除されている時には、自車速Vfと相対速Vrとに基づいて非制御時の警報距離Dwを設定し、車間距離DがDwより小さくなった場合にブザー10および表示装置11により警告する。
【0011】この実施の形態では、制御時警報距離Da[m]と非制御時警報距離Dw[m]を次式により演算する。
【数1】

数式1において、Vfは自車速[m/s]である。Vrは先行車との相対速[m/s]であり、接近時を正とする。また、α1は減速度[m/ss]であり、減速時を正とする。t1およびt2はそれぞれ時定数である。
【0012】数式1は、(Vf−Vr)で走行する先行車に対して自車速Vfで接近していく場合を想定した演算式である。右辺の第1項は、自車がα1で減速した場合に、相対速Vrが0になるまでに短くなる車間距離を表す。また、右辺の第2項は、警報が発せられてから減速が開始されるまでの遅れ時間t1中に短くなる車間距離を表す。さらに、右辺の第3項は、相対速Vrが0になった時点での車間距離の設定値であり、先行車の速度(Vf−Vr)に車間時間t2を乗じた値で求められる。これら3項の値を加算した距離が警報距離Da、Dwになる。
【0013】制御時警報距離Daと非制御時警報距離Dwとは別個の演算式を用いることも考えられるが、この実施の形態では同一形式の演算式を用い、制御時と非制御時とで時定数t1、t2を切り換える。
【0014】制御時には減速操作を先行車追従装置が行い、非制御時は運転者が減速操作を行うので、制御時と非制御時とで時定数t1と減速度α1を切り換える。すなわち、機械(先行車追従装置)と人間(運転者)とで反応時間が異なるため、制御時と非制御時で時定数t1を切り換える。また、機械が出し得る最大減速度と、人間がブレーキ操作を行った場合の最大減速度とは異なるため、制御時と非制御時で減速度α1を切り換える。
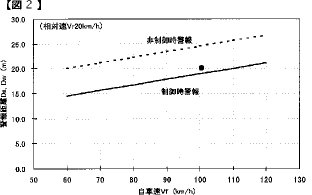
【0015】図2は、制御時にt1=0.4s、α1=0.2G、非制御時にt1=2.0s、α1=0.35G(3.43m/ss)と設定した場合の警報距離Da、Dwを表す。なお、車間時間t2=0.4s、相対速Vr=20km/hとした。この定数設定では、自車速Vfが変化してもDa<Dwとなり、例えば自車速Vf=100km/hのときに制御時警報距離Da=19.0m、非制御時警報距離Dw=24.5mとなる。
【0016】今、制御スイッチ3により先行車追従制御が設定され、自車速Vf=100km/h、車間距離D=20mとする(図中の黒丸)。この場合、数式1による警報距離Daの演算には制御時の定数t1、α1が用いられ、演算結果はD>Daとなって警報は発せられない。しかし、この状態で制御スイッチ3により先行車追従制御の解除操作がなされると、数式1には非制御時の定数が用いられ、演算結果はD<Dwとなって警報が発せられる。つまり、先行車追従制御の設定時にDa<D<Dwの関係にある場合に、先行車追従制御の解除操作がなされるとただちに警報が発せられる。この問題は、数式1に限らず他の警報距離演算式を用いた場合でも、Da<D<Dwの関係にあれば追従制御を解除したとたんに警報が発せられる。
【0017】そこで、この実施の形態では、計測車間距離Dと制御時警報距離Daと非制御時警報距離Dwとの間にDa<D<Dwの関係がある状態で先行車追従制御を解除したときに、運転者のアクセル操作およびブレーキ操作がない場合は、D≧DwまたはVr≦0となるように先行車追従制御を継続する。これにより、先行車追従制御を解除した直後の無用な警報発生を防止でき、運転者の戸惑いをなくすことができる。
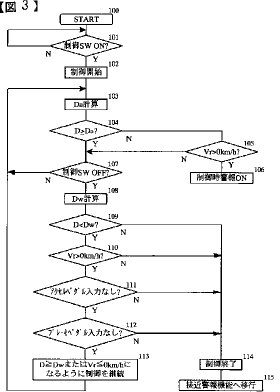
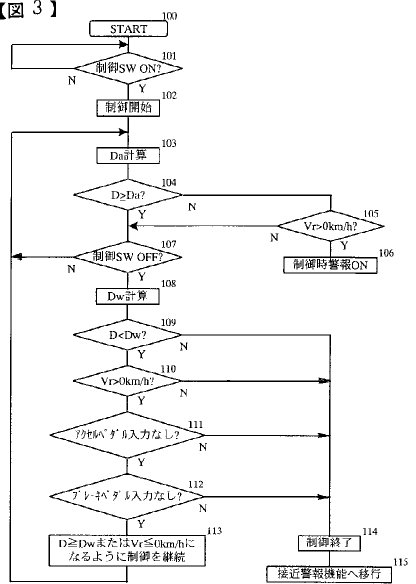
【0018】図3は、一実施の形態の先行車追従制御を示すフローチャートである。このフローチャートにより、一実施の形態の動作を説明する。コントローラー6は、先行車追従装置の電源が投入されるとこの制御プログラムの実行を開始する。ステップ101において、制御スイッチ3による先行車追従制御の設定、解除状態を確認し、追従制御が設定されていればステップ102へ進む。ステップ102では先行車追従制御を開始する。ステップ103で車両制御時の定数t1、α1を用いて数式1により警報距離Daを演算し、続くステップ104で車間距離計測装置1により計測した車間距離Dを警報距離Daと比較する。計測車間距離Dが警報距離Daより小さい場合はステップ105へ進み、相対速Vrが正、すなわち先行車に接近しているか否かを確認する。計測車間距離Dが警報距離Daより小さく、且つ相対速Vrが正で先行車に接近している場合は、ステップ106でブザー10および表示装置11により制御時の接近警報を発する。
【0019】計測車間距離Dが警報距離Da以上の場合、または、計測車間距離Dが警報距離Daより小さくても相対速Vrが負で先行車から遠ざかっている場合には、警報を発せずにステップ107へ進む。ステップ107では制御スイッチ3による先行車追従制御の設定、解除状態を確認し、追従制御が設定されたままであればステップ103へ戻って上記処理を繰り返す。追従制御が解除されていればステップ108へ進み、非制御時の定数t1、α1を用いて非制御時警報距離Dwを演算する。
【0020】次に、ステップ109〜112において所定の追従制御終了条件を確認する。この実施の形態では、追従制御終了条件を、計測車間距離Dが非制御時警報距離Dw以上(S109)、相対速Vrが負、すなわち先行車に対して自車が非接近状況にある(S110)、アクセルスイッチ5がオン、すなわち運転者による加速操作有り(S111)、ブレーキスイッチ4がオン、すなわち運転者による減速操作有り(S112)とする。これらの追従制御終了条件のいずれか1つを満たす場合はステップ114へ進み、ただちに先行車追従制御を終了する。そして、続くステップ115で非制御時の接近警報制御を開始する。以上の追従制御終了条件をすべて満たさない場合はステップ113へ進み、車間距離Dが非制御時警報距離Dw以上、または相対速Vrが0または負になるように先行車追従制御を継続し、ステップ103へ戻る。なお、追従制御終了条件は上記の条件に限定されない。
【0021】《上述した一実施の形態の変形例》上述した一実施の形態では、制御スイッチ3により先行車追従制御が解除されたときに、運転者のアクセル操作とブレーキ操作がない場合には無用な接近警報を防止できるが、運転者のアクセル操作またはブレーキ操作があると警報発生を防止できないことがある。例えば先行車追従制御を解除して加速しながら車線変更し、先行車を追い越す場合や、ブレーキ操作を行っていると接近警報が発せられてしまう。
【0022】そこで、この変形例では、先行車追従制御を解除したときにアクセル操作があった場合にはただちに先行車追従制御を終了するが、所定時間T1が経過してから非制御時の接近警報制御を開始する。これにより、先行車追従制御を解除して先行車を追い越す場合などの無用な警報発生を防止できる。また、先行車追従制御を解除したときにブレーキ操作があった場合にはただちに先行車追従制御を終了するが、ブレーキペダルが開放されてから接近警報制御を開始する。これにより、先行車追従制御を解除してブレーキ操作を行う時の無用な警報発生を防止できる。
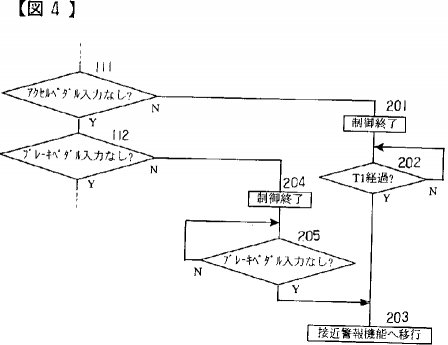
【0023】図4は、変形例の先行車追従制御を示すフローチャートである。なお、図3に示す処理と異なる部分のみを図示する。ステップ111で運転者のアクセル操作が確認された場合にはステップ201へ進み、ただちに先行車追従制御を終了する。続くステップ202で所定時間T1の時間待ちを行った後にステップ203へ進み、接近警報制御を開始する。また、ステップ112で運転者のブレーキ操作が確認された場合はステップ204へ進み、ただちに先行車追従制御を終了する。続くステップ205でブレーキスイッチ4によりブレーキペダルが開放されたか否かを確認し、ブレーキペダルが開放されたらステップ203へ進んで接近開放制御を開始する。
【図面の簡単な説明】
【図1】 一実施の形態の構成を示す図である。
【図2】 先行車追従制御時と非制御時の警報距離の一例を示す図である。
【図3】 一実施の形態の先行車追従制御を示すフローチャートである。
【図4】 変形例の先行車追従制御を示すフローチャートである。
【符号の説明】
1 車間距離計測装置
2 車速センサー
3 先行車追従制御スイッチ
4 ブレーキスイッチ
5 アクセルスイッチ
6 コントローラー
7 スロットルアクチュエーター
8 ブレーキアクチュエーター
9 トランスミッションアクチュエーター
10 ブザー
11 表示装置
【0001】
【発明の属する技術分野】本発明は、先行車との車間距離が目標値となるように車速を制御する先行車追従装置に関する。
【0002】
【従来の技術とその問題点】先行車との車間距離を計測し、先行車追従制御時(以下、単に制御時という)には先行車との車間距離が目標値となるように車速を制御する先行車追従制御機能と、先行車追従制御の解除時(以下、単に非制御時という)には車間距離が目標値より小さくなった場合に警告を行う接近警報機能とを備えた先行車追従装置が知られている。
【0003】この種の先行車追従装置では、制御時には、先行車との車間距離Dを計測し、車間距離Dが自車速Vfに基づいて設定された目標車間距離Doとなるように、スロットルバルブ、トランスミッション、ブレーキなどを制御するとともに、先行車との相対速度Vrと自車速Vfとに基づいて制御時の警報距離Daを設定し、車間距離DがDaよりも小さくなった場合に警報を発する。一方、非制御時には、自車速Vfと相対速Vrとに基づいて非制御時の警報距離Dwを設定し、車間距離DがDwより小さくなった場合に警報を発する。
【0004】しかしながら、従来の先行車追従装置では、制御時警報距離Daと非制御時警報距離DwがDa<Dwの関係に設定され、制御時に車間距離DがDa<D<Dwの関係を満たしているときに、先行車追従制御を解除するとただちに非制御時の警報が発せられてしまう、という問題がある。
【0005】本発明の目的は、先行車追従制御を解除したときに無用な接近警報が発せられるのを防止することにある。
【0006】
【課題を解決するための手段】一実施の形態の構成を示す図1に対応づけて本発明を説明すると、(1) 請求項1の発明は、先行車追従制御を設定または解除するための操作部材3と、先行車との車間距離を計測する車間距離計測手段1と、自車速を検出する自車速検出手段2とを備え、先行車追従制御の設定時には、車間距離計測値が目標値となるように自車速を制御するとともに、車間距離計測値が予め設定した第1の距離より小さくなったら警告し、先行車追従制御の解除時には、車間距離計測値が予め設定した第2の距離より小さくなったら警告する先行車追従装置に適用される。そして、操作部材3により先行車追従制御の解除操作がなされても、所定の追従制御終了条件を満たすまで先行車追従制御を継続する制御手段6を備えることにより、上記目的を達成する。
(2) 請求項2の先行車追従装置は、車間距離計測値が第2の設定距離以上とする条件を追従制御終了条件としたものである。
(3) 請求項3の先行車追従装置は、車間距離計測値の時間変化に基づいて先行車に対する自車の接近、非接近状況を判定する判定手段6を備え、先行車に対して自車が非接近状況にある条件を追従制御終了条件としたものである。
(4) 請求項4の先行車追従装置は、運転者の加速操作を検出する加速操作検出手段5を備え、運転者により加速操作が行われている条件を追従制御終了条件としたものである。
(5) 請求項5の先行車追従装置は、運転者の減速操作を検出する減速操作検出手段4を備え、運転者により減速操作が行われている条件を追従制御終了条件としたものである。
(6) 請求項6の先行車追従装置は、制御手段6によって、先行車追従制御の解除操作がなされたときに加速操作があると先行車追従制御を終了し、所定時間後に車間距離計測値と第2の設定距離による警告制御を開始するようにしたものである。
(7) 請求項7の先行車追従装置は、制御手段6によって、先行車追従制御の解除操作がなされたときに減速操作があると先行車追従制御を終了し、減速操作がなくなってから車間距離計測値と第2の設定距離による前記警告制御を開始するようにしたものである。
【0007】上述した課題を解決するための手段の項では、説明を分かりやすくするために一実施の形態の図を用いたが、これにより本発明が一実施の形態に限定されるものではない。
【0008】
【発明の効果】(1) 請求項1〜5の発明によれば、先行車追従制御の解除操作がなされても、所定の追従制御終了条件を満たすまで先行車追従制御を継続するようにしたので、先行車追従制御を解除したときに無用な接近警報が発せられるのを防止でき、運転者の戸惑いをなくすことができる。
(2) 請求項6の発明によれば、先行車追従制御の解除操作がなされたときに加速操作があると先行車追従制御を終了し、所定時間後に車間距離計測値と第2の設定距離による警告制御を開始するようにしたので、先行車追従制御を解除して先行車を追い越す場合などの無用な警報発生を防止できる。
(3) 請求項7の発明によれば、先行車追従制御の解除操作がなされたときに減速操作があると先行車追従制御を終了し、減速操作がなくなってから車間距離計測値と第2の設定距離による前記警告制御を開始するようにしたので、先行車追従制御を解除してブレーキ操作を行う時の無用な警報発生を防止できる。
【0009】
【発明の実施の形態】図1は一実施の形態の構成を示す図である。車間距離計測装置1は自車と同一車線上を走行する先行車を認識し、先行車までの車間距離Dおよび自車と先行車との相対速Vrを計測する。この車間距離計測装置1には、赤外光レーザーを用いたレーザーレーダーや、電波を用いたミリ波レーダーなどを用いることができる。なお、自車と先行車との相対速度Vrは、例えば計測車間距離Dを時間微分して求められる。車速センサー2は自車の走行速度Vfを計測する。制御スイッチ3は先行車追従制御を設定(オン)または解除(オフ)するための操作部材であり、設定時には先行車追従制御機能と制御時の接近警報機能が働き、解除時には非制御時の接近警報機能が働く。ブレーキスイッチ4は運転者の減速操作を検出するためのスイッチであり、ブレーキペダルが踏み込まれるとオンする。また、アクセルスイッチ5は運転者の加速操作を検出するためのスイッチであり、アクセルペダルが踏み込まれるとオンする。
【0010】コントローラー6はマイクロコンピューターとその周辺部品から構成され、制御スイッチ3により先行車追従制御が設定されている時には、車間距離Dが自車速Vfに基づいて設定された目標値となるように、スロットルアクチュエーター7、ブレーキアクチュエーター8およびトランスミッションアクチュエーター9を制御するとともに、先行車との相対速度Vrと自車速Vfとに基づいて制御時の警報距離Daを設定し、車間距離DがDaよりも小さくなった場合に車間距離Dを目標値Doに制御できないおそれがあるとしてブザー10および表示装置11により警告する。また、制御スイッチ3により先行車追従制御が解除されている時には、自車速Vfと相対速Vrとに基づいて非制御時の警報距離Dwを設定し、車間距離DがDwより小さくなった場合にブザー10および表示装置11により警告する。
【0011】この実施の形態では、制御時警報距離Da[m]と非制御時警報距離Dw[m]を次式により演算する。
【数1】
数式1において、Vfは自車速[m/s]である。Vrは先行車との相対速[m/s]であり、接近時を正とする。また、α1は減速度[m/ss]であり、減速時を正とする。t1およびt2はそれぞれ時定数である。
【0012】数式1は、(Vf−Vr)で走行する先行車に対して自車速Vfで接近していく場合を想定した演算式である。右辺の第1項は、自車がα1で減速した場合に、相対速Vrが0になるまでに短くなる車間距離を表す。また、右辺の第2項は、警報が発せられてから減速が開始されるまでの遅れ時間t1中に短くなる車間距離を表す。さらに、右辺の第3項は、相対速Vrが0になった時点での車間距離の設定値であり、先行車の速度(Vf−Vr)に車間時間t2を乗じた値で求められる。これら3項の値を加算した距離が警報距離Da、Dwになる。
【0013】制御時警報距離Daと非制御時警報距離Dwとは別個の演算式を用いることも考えられるが、この実施の形態では同一形式の演算式を用い、制御時と非制御時とで時定数t1、t2を切り換える。
【0014】制御時には減速操作を先行車追従装置が行い、非制御時は運転者が減速操作を行うので、制御時と非制御時とで時定数t1と減速度α1を切り換える。すなわち、機械(先行車追従装置)と人間(運転者)とで反応時間が異なるため、制御時と非制御時で時定数t1を切り換える。また、機械が出し得る最大減速度と、人間がブレーキ操作を行った場合の最大減速度とは異なるため、制御時と非制御時で減速度α1を切り換える。
【0015】図2は、制御時にt1=0.4s、α1=0.2G、非制御時にt1=2.0s、α1=0.35G(3.43m/ss)と設定した場合の警報距離Da、Dwを表す。なお、車間時間t2=0.4s、相対速Vr=20km/hとした。この定数設定では、自車速Vfが変化してもDa<Dwとなり、例えば自車速Vf=100km/hのときに制御時警報距離Da=19.0m、非制御時警報距離Dw=24.5mとなる。
【0016】今、制御スイッチ3により先行車追従制御が設定され、自車速Vf=100km/h、車間距離D=20mとする(図中の黒丸)。この場合、数式1による警報距離Daの演算には制御時の定数t1、α1が用いられ、演算結果はD>Daとなって警報は発せられない。しかし、この状態で制御スイッチ3により先行車追従制御の解除操作がなされると、数式1には非制御時の定数が用いられ、演算結果はD<Dwとなって警報が発せられる。つまり、先行車追従制御の設定時にDa<D<Dwの関係にある場合に、先行車追従制御の解除操作がなされるとただちに警報が発せられる。この問題は、数式1に限らず他の警報距離演算式を用いた場合でも、Da<D<Dwの関係にあれば追従制御を解除したとたんに警報が発せられる。
【0017】そこで、この実施の形態では、計測車間距離Dと制御時警報距離Daと非制御時警報距離Dwとの間にDa<D<Dwの関係がある状態で先行車追従制御を解除したときに、運転者のアクセル操作およびブレーキ操作がない場合は、D≧DwまたはVr≦0となるように先行車追従制御を継続する。これにより、先行車追従制御を解除した直後の無用な警報発生を防止でき、運転者の戸惑いをなくすことができる。
【0018】図3は、一実施の形態の先行車追従制御を示すフローチャートである。このフローチャートにより、一実施の形態の動作を説明する。コントローラー6は、先行車追従装置の電源が投入されるとこの制御プログラムの実行を開始する。ステップ101において、制御スイッチ3による先行車追従制御の設定、解除状態を確認し、追従制御が設定されていればステップ102へ進む。ステップ102では先行車追従制御を開始する。ステップ103で車両制御時の定数t1、α1を用いて数式1により警報距離Daを演算し、続くステップ104で車間距離計測装置1により計測した車間距離Dを警報距離Daと比較する。計測車間距離Dが警報距離Daより小さい場合はステップ105へ進み、相対速Vrが正、すなわち先行車に接近しているか否かを確認する。計測車間距離Dが警報距離Daより小さく、且つ相対速Vrが正で先行車に接近している場合は、ステップ106でブザー10および表示装置11により制御時の接近警報を発する。
【0019】計測車間距離Dが警報距離Da以上の場合、または、計測車間距離Dが警報距離Daより小さくても相対速Vrが負で先行車から遠ざかっている場合には、警報を発せずにステップ107へ進む。ステップ107では制御スイッチ3による先行車追従制御の設定、解除状態を確認し、追従制御が設定されたままであればステップ103へ戻って上記処理を繰り返す。追従制御が解除されていればステップ108へ進み、非制御時の定数t1、α1を用いて非制御時警報距離Dwを演算する。
【0020】次に、ステップ109〜112において所定の追従制御終了条件を確認する。この実施の形態では、追従制御終了条件を、計測車間距離Dが非制御時警報距離Dw以上(S109)、相対速Vrが負、すなわち先行車に対して自車が非接近状況にある(S110)、アクセルスイッチ5がオン、すなわち運転者による加速操作有り(S111)、ブレーキスイッチ4がオン、すなわち運転者による減速操作有り(S112)とする。これらの追従制御終了条件のいずれか1つを満たす場合はステップ114へ進み、ただちに先行車追従制御を終了する。そして、続くステップ115で非制御時の接近警報制御を開始する。以上の追従制御終了条件をすべて満たさない場合はステップ113へ進み、車間距離Dが非制御時警報距離Dw以上、または相対速Vrが0または負になるように先行車追従制御を継続し、ステップ103へ戻る。なお、追従制御終了条件は上記の条件に限定されない。
【0021】《上述した一実施の形態の変形例》上述した一実施の形態では、制御スイッチ3により先行車追従制御が解除されたときに、運転者のアクセル操作とブレーキ操作がない場合には無用な接近警報を防止できるが、運転者のアクセル操作またはブレーキ操作があると警報発生を防止できないことがある。例えば先行車追従制御を解除して加速しながら車線変更し、先行車を追い越す場合や、ブレーキ操作を行っていると接近警報が発せられてしまう。
【0022】そこで、この変形例では、先行車追従制御を解除したときにアクセル操作があった場合にはただちに先行車追従制御を終了するが、所定時間T1が経過してから非制御時の接近警報制御を開始する。これにより、先行車追従制御を解除して先行車を追い越す場合などの無用な警報発生を防止できる。また、先行車追従制御を解除したときにブレーキ操作があった場合にはただちに先行車追従制御を終了するが、ブレーキペダルが開放されてから接近警報制御を開始する。これにより、先行車追従制御を解除してブレーキ操作を行う時の無用な警報発生を防止できる。
【0023】図4は、変形例の先行車追従制御を示すフローチャートである。なお、図3に示す処理と異なる部分のみを図示する。ステップ111で運転者のアクセル操作が確認された場合にはステップ201へ進み、ただちに先行車追従制御を終了する。続くステップ202で所定時間T1の時間待ちを行った後にステップ203へ進み、接近警報制御を開始する。また、ステップ112で運転者のブレーキ操作が確認された場合はステップ204へ進み、ただちに先行車追従制御を終了する。続くステップ205でブレーキスイッチ4によりブレーキペダルが開放されたか否かを確認し、ブレーキペダルが開放されたらステップ203へ進んで接近開放制御を開始する。
【図面の簡単な説明】
【図1】 一実施の形態の構成を示す図である。
【図2】 先行車追従制御時と非制御時の警報距離の一例を示す図である。
【図3】 一実施の形態の先行車追従制御を示すフローチャートである。
【図4】 変形例の先行車追従制御を示すフローチャートである。
【符号の説明】
1 車間距離計測装置
2 車速センサー
3 先行車追従制御スイッチ
4 ブレーキスイッチ
5 アクセルスイッチ
6 コントローラー
7 スロットルアクチュエーター
8 ブレーキアクチュエーター
9 トランスミッションアクチュエーター
10 ブザー
11 表示装置
【特許請求の範囲】
【請求項1】先行車追従制御を設定または解除するための操作部材と、先行車との車間距離を計測する車間距離計測手段と、自車速を検出する自車速検出手段とを備え、先行車追従制御の設定時には、車間距離計測値が目標値となるように自車速を制御するとともに、車間距離計測値が予め設定した第1の距離より小さくなったら警告し、先行車追従制御の解除時には、車間距離計測値が予め設定した第2の距離より小さくなったら警告する先行車追従装置において、前記操作部材により先行車追従制御の解除操作がなされても、所定の追従制御終了条件を満たすまで先行車追従制御を継続する制御手段を備えることを特徴とする先行車追従装置。
【請求項2】請求項1に記載の先行車追従装置において、車間距離計測値が第2の設定距離以上とする条件を前記追従制御終了条件とする、ことを特徴とする先行車追従装置。
【請求項3】請求項1または請求項2に記載の先行車追従装置において、車間距離計測値の時間変化に基づいて先行車に対する自車の接近、非接近状況を判定する判定手段を備え、先行車に対して自車が非接近状況にある条件を前記追従制御終了条件とする、ことを特徴とする先行車追従装置。
【請求項4】請求項1〜3のいずれかの項に記載の先行車追従装置において、運転者の加速操作を検出する加速操作検出手段を備え、運転者により加速操作が行われている条件を前記追従制御終了条件とする、ことを特徴とする先行車追従装置。
【請求項5】請求項1〜4のいずれかの項に記載の先行車追従装置において、運転者の減速操作を検出する減速操作検出手段を備え、運転者により減速操作が行われている条件を前記追従制御終了条件とする、ことを特徴とする先行車追従装置。
【請求項6】請求項4に記載の先行車追従装置において、前記制御手段は、先行車追従制御の解除操作がなされたときに加速操作があると先行車追従制御を終了し、所定時間後に車間距離計測値と第2の設定距離による前記警告制御を開始することを特徴とする先行車追従装置。
【請求項7】請求項5に記載の先行車追従装置において、前記制御手段は、先行車追従制御の解除操作がなされたときに減速操作があると先行車追従制御を終了し、減速操作がなくなってから車間距離計測値と第2の設定距離による前記警告制御を開始することを特徴とする先行車追従装置。
【請求項1】先行車追従制御を設定または解除するための操作部材と、先行車との車間距離を計測する車間距離計測手段と、自車速を検出する自車速検出手段とを備え、先行車追従制御の設定時には、車間距離計測値が目標値となるように自車速を制御するとともに、車間距離計測値が予め設定した第1の距離より小さくなったら警告し、先行車追従制御の解除時には、車間距離計測値が予め設定した第2の距離より小さくなったら警告する先行車追従装置において、前記操作部材により先行車追従制御の解除操作がなされても、所定の追従制御終了条件を満たすまで先行車追従制御を継続する制御手段を備えることを特徴とする先行車追従装置。
【請求項2】請求項1に記載の先行車追従装置において、車間距離計測値が第2の設定距離以上とする条件を前記追従制御終了条件とする、ことを特徴とする先行車追従装置。
【請求項3】請求項1または請求項2に記載の先行車追従装置において、車間距離計測値の時間変化に基づいて先行車に対する自車の接近、非接近状況を判定する判定手段を備え、先行車に対して自車が非接近状況にある条件を前記追従制御終了条件とする、ことを特徴とする先行車追従装置。
【請求項4】請求項1〜3のいずれかの項に記載の先行車追従装置において、運転者の加速操作を検出する加速操作検出手段を備え、運転者により加速操作が行われている条件を前記追従制御終了条件とする、ことを特徴とする先行車追従装置。
【請求項5】請求項1〜4のいずれかの項に記載の先行車追従装置において、運転者の減速操作を検出する減速操作検出手段を備え、運転者により減速操作が行われている条件を前記追従制御終了条件とする、ことを特徴とする先行車追従装置。
【請求項6】請求項4に記載の先行車追従装置において、前記制御手段は、先行車追従制御の解除操作がなされたときに加速操作があると先行車追従制御を終了し、所定時間後に車間距離計測値と第2の設定距離による前記警告制御を開始することを特徴とする先行車追従装置。
【請求項7】請求項5に記載の先行車追従装置において、前記制御手段は、先行車追従制御の解除操作がなされたときに減速操作があると先行車追従制御を終了し、減速操作がなくなってから車間距離計測値と第2の設定距離による前記警告制御を開始することを特徴とする先行車追従装置。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2000−52806(P2000−52806A)
【公開日】平成12年2月22日(2000.2.22)
【国際特許分類】
【出願番号】特願平10−222922
【出願日】平成10年8月6日(1998.8.6)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成12年2月22日(2000.2.22)
【国際特許分類】
【出願日】平成10年8月6日(1998.8.6)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]