
光センサにおいて低速光を使用するためのシステムおよび方法
【課題】低速光の使用によって感度を上昇させる、光センサのシステムおよび方法を提供する。
【解決手段】少なくとも1つの光結合器46と、複数のループを含む光導波路42と、光検出器とを備えている。光導波路は、少なくとも1つの光結合器に光学的に連通し、複数のループの対称軸を中心とする光導波路の回転によって少なくとも1つの光結合器と光導波路とが互いに関して移動することができるように、少なくとも1つの光結合器から機械的に分断され、光導波路は、少なくとも1つの光結合器から第1の光信号を受取るように構成され、第1の光信号14は、光導波路の少なくとも一部分を伝播する間、ある群速度およびある位相速度を有し、群速度は位相速度未満であり、第1の光信号と第2の光信号との間の干渉は、対称軸を中心とする光導波路の回転によって影響される。光検出器は第1の光信号と第2の光信号との間の干渉を検出するように構成されている。
【解決手段】少なくとも1つの光結合器46と、複数のループを含む光導波路42と、光検出器とを備えている。光導波路は、少なくとも1つの光結合器に光学的に連通し、複数のループの対称軸を中心とする光導波路の回転によって少なくとも1つの光結合器と光導波路とが互いに関して移動することができるように、少なくとも1つの光結合器から機械的に分断され、光導波路は、少なくとも1つの光結合器から第1の光信号を受取るように構成され、第1の光信号14は、光導波路の少なくとも一部分を伝播する間、ある群速度およびある位相速度を有し、群速度は位相速度未満であり、第1の光信号と第2の光信号との間の干渉は、対称軸を中心とする光導波路の回転によって影響される。光検出器は第1の光信号と第2の光信号との間の干渉を検出するように構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
関連出願との相互参照
本願は、2007年6月15日出願の米国仮出願番号第60/944,396号の優先権を主張し、全体を引用により本明細書に援用する。
【0002】
背景
分野
本願は概して光センサに関し、特に光ファイバセンサに関する。
【背景技術】
【0003】
関連技術の説明
近年、真空中の光の速度よりも著しく低くなるように光の群速度を大幅に低下させる(「低速光」と称する)ことが注目されている。電子誘導透過(たとえば、S. E. Harris, “Electromagnetically induced transparency,”Phys. Today, Vol. 50, No. 7, 36-42 (1997)参照)、ブラッグファイバ(たとえば、C. Lin, W. Zhang, Y. Huang, およびJ. Peng,“Zero dispersion slow light with low leakage loss in defect Bragg fiber,”Appl. Phys. Lett., Vol. 90, 031109 (2007)参照)、ならびに結合共振器アレイ(たとえば、A. Yariv, Y. Xu, R.K. Lee, およびA. Scherer,“Coupled resonator optical waveguide: a proposal and analysis,”Opt. Lett., Vol. 24, No. 11, 711-713 (1997)参照)などのシステムはすべて、光の群速度の大きさを数桁低下させることを示している。これらの各文献の全体を引用により本明細書に援用する。また、低速光はフォトニックバンドギャップ構造において研究されている。(たとえば、M. Soljacic, S.G. Johnson, S. Fan, M. Ibansecu, E. Ippen, およびJ.D. Joannopoulos,“Photonic-crystal slow-light enhancement of nonlinear phase sensitivity,”J. Opt. Soc. Am. B, Vol. 19, No. 9, 2052-2059 (2002);2005年7月12日発行の米国特許番号第6,917,431号“Mach-Zehnder interferometer using photonic band gap crystals”;2006年10月3日発行の米国特許番号第7,116,864号“Stopping and time reversing light in a waveguide with an all-optical system”;M.F. YanikおよびS. Fan,“Stopping light all-optically,”Phys. Rev. Lett., Vol. 92, 083901(2004);M.F. Yanik, W. Suh, Z. WangおよびS. Fan,“Stopping light in a waveguide with an all-optical analogue of electromagnetic induced transparency,”Phys. Rev. Lett., Vol. 93, 233903 (2004);M.F. YanikおよびS. Fan, “Stopping and storing light coherently,”Phys. Rev. A, Vol. 71, 013803 (2005);S. Sandhu, M.L. Povinelli, M.F. YanikおよびS. Fan,“Dynamically-tuned coupled resonator delay lines can be nearly dispersion free,”Optics Lett., Vol. 31, 1985-1987 (2006)参照。各々の全体を引用により本明細書に援用する。)
【発明の概要】
【課題を解決するための手段】
【0004】
概要
一部の実施例において、光センサは、少なくとも1つの光結合器と、当該少なくとも1つの光結合器に光学的に連通する光導波路とを含む。光導波路は、当該少なくとも1つの光結合器から第1の光信号を受取るように構成される。第1の光信号は、光導波路の少なくとも一部分を伝播する間、ある群速度およびある位相速度を有し、群速度は位相速度未満である。第1の光信号と第2の光信号との間の干渉は、光センサの少なくとも一部分への摂動によって影響される。
【0005】
一部の実施例において、光センサは、少なくとも1つの光結合器と、当該少なくとも1つの光結合器から第1の光信号および第2の光信号を受取るように構成された光導波路とを含む。光はある群速度およびある位相速度で光導波路の少なくとも一部分を伝播し、群速度は位相速度未満である。光導波路は、第1の光信号が第1の方向に光導波路を伝播しかつ第2の光信号が第1の方向とおおむね反対の第2の方向に光導波路を伝播する間、第1の方向に沿って移動するように構成される。第1の光信号と前記第2の光信号との間の干渉は、光センサの少なくとも一部分への摂動によって影響される。
【0006】
一部の実施例において、光センサは、光源から光を受取りかつ光を光検出器に伝えるように構成されたファイバ結合器を含む。光センサはさらに、ファイバ結合器に光学的に結合されたファイバコイルを含む。ファイバコイルの少なくとも一部分は、ある群速度およびある位相速度で光が伝播する光ファイバを含み、群速度は位相速度未満である。ファイバコイルおよびファイバ結合器の少なくとも一方は、ファイバコイルの第1の部分とファイバ結合器との間の第1の光路長が増大し、かつファイバコイルの第2の部分とファイバ結合器との間の第2の光路長が減少するように、他方に関して移動するように構成される。光源からファイバ結合器によって受取られた光の第1の部分は、ファイバ結合器から第1の方向にファイバコイルを伝播してファイバ結合器に戻り、光源からファイバ結合器によって受取られた光の第2の部分は、ファイバ結合器から第1の方向と反対の第2の方向にファイバコイルを伝播してファイバ結合器に戻る。光の第1の部分および光の第2の部分は、光検出器に伝播しかつ互いに干渉し、光の第1の部分と光の第2の部分との間の干渉は、ファイバ結合器に関するファイバコイルの移動を示す。
【0007】
一部の実施例において、方法は、第1の測定量の変化に対する第1の感度と第2の測定量の変化に対する第2の感度とを有する光センサを製造する。当該方法は、光がある群速度およびある位相速度で伝播するように構成された光導波路を供給するステップを含み、群速度は位相速度未満である。第1の感度の第1の向上は光導波路の群屈折率に依存し、第2の感度の第2の向上は群屈折率に依存する。当該方法はさらに、第1の向上が第2の向上を上回るように群屈折率を選択するステップを含む。
【図面の簡単な説明】
【0008】
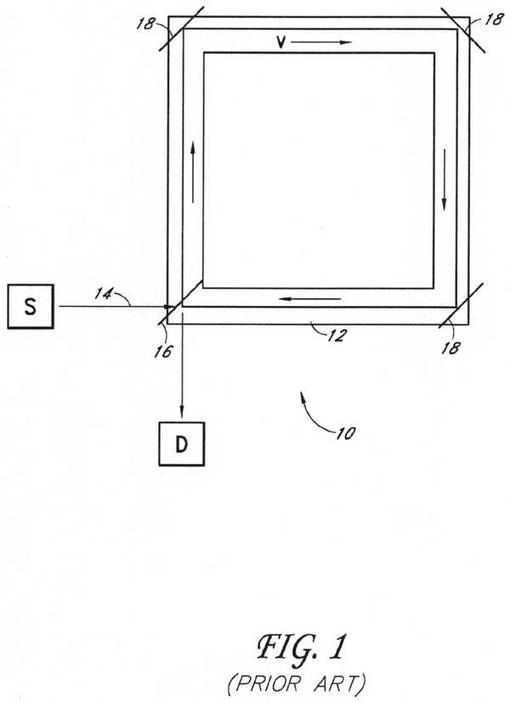
【図1】干渉流体速度センサを概略的に示す図である。
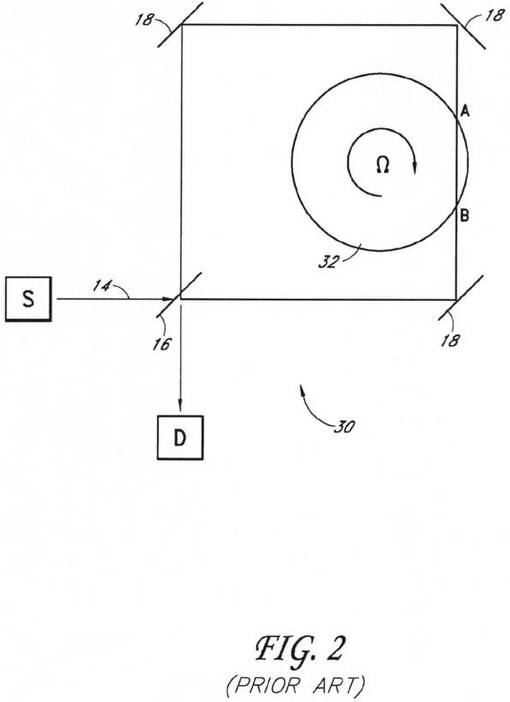
【図2】干渉接線速度センサを概略的に示す図である。
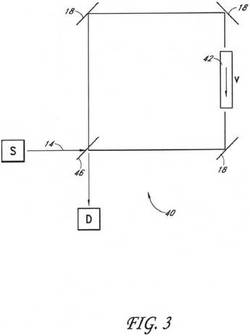
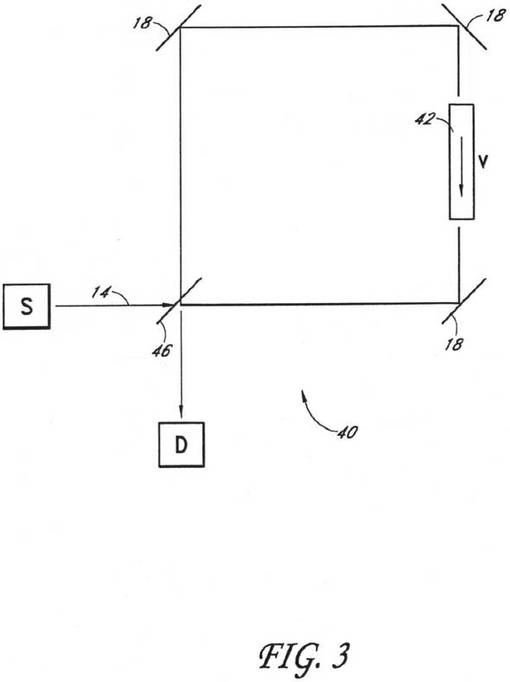
【図3】本明細書に記載される一部の実施例に係る例示的な光センサを概略的に示す図である。
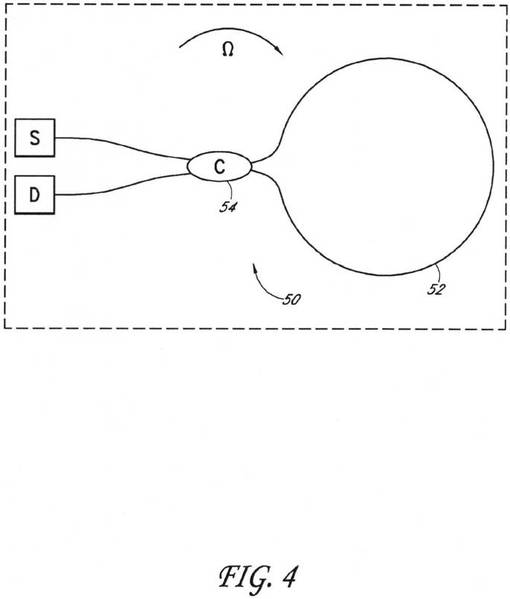
【図4】従来の光ファイバジャイロスコープ(FOG)を概略的に示す図である。
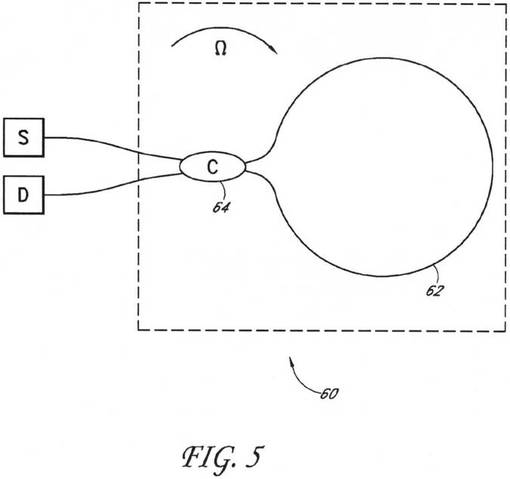
【図5】静止した光源および検出器を有する光ファイバジャイロスコープを概略的に示す図である。
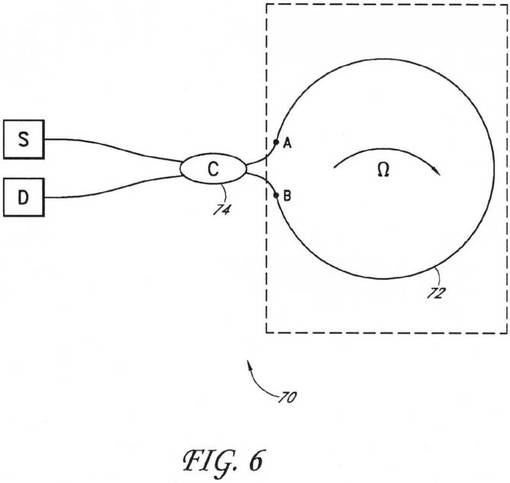
【図6】静止した光源、検出器および結合器を有する光ファイバジャイロスコープを概略的に示す図である。
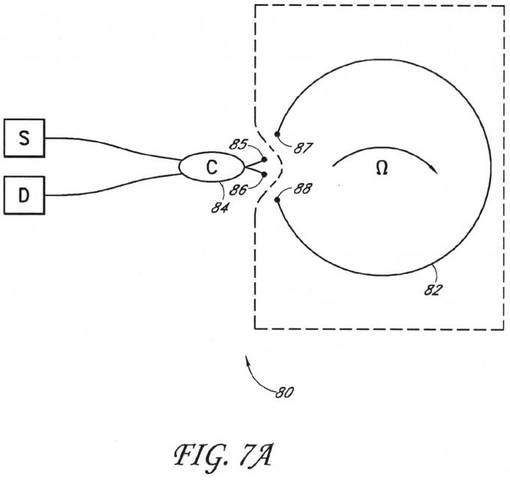
【図7A】本明細書に記載される一部の実施例に係る例示的な光ファイバジャイロスコープを概略的に示す図である。
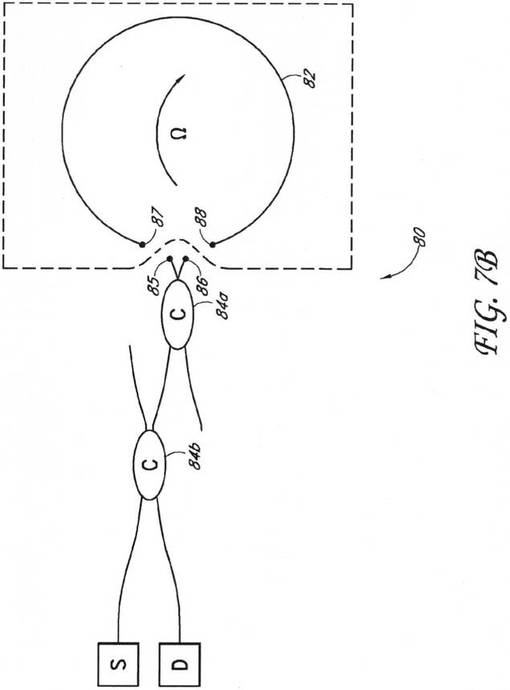
【図7B】本明細書に記載される一部の実施例に係る図7Aの光ファイバジャイロスコープの逆の構造を概略的に示す図である。
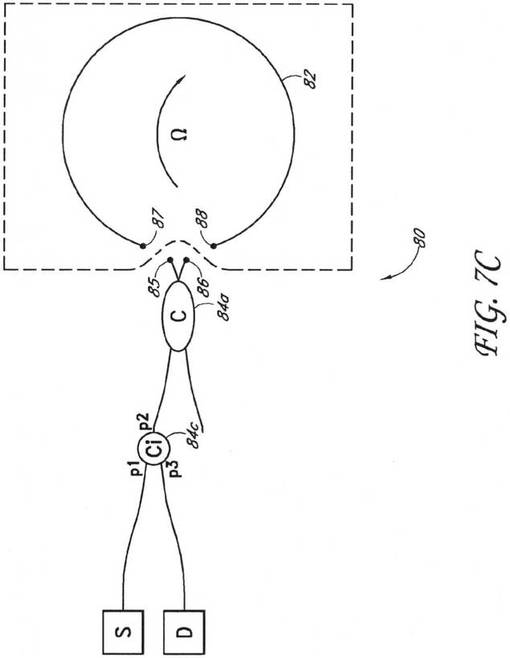
【図7C】本明細書に記載される一部の実施例に係るサーキュレータを用いた図7Aの光ファイバジャイロスコープの別の逆の構造を概略的に示す図である。
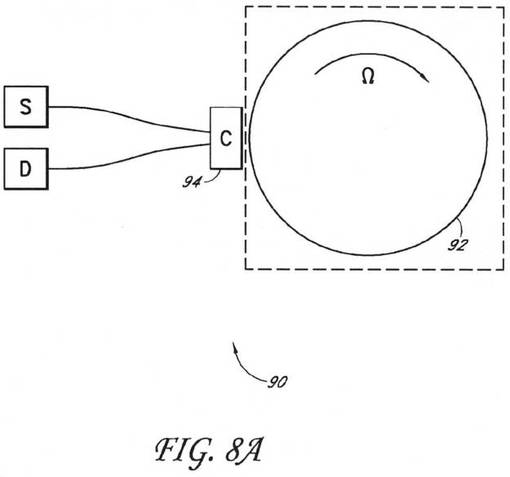
【図8A】本明細書に記載される一部の実施例に係るプリズム結合器および回転ファイバコイルを含む別の例示的な光ファイバジャイロスコープを概略的に示す図である。
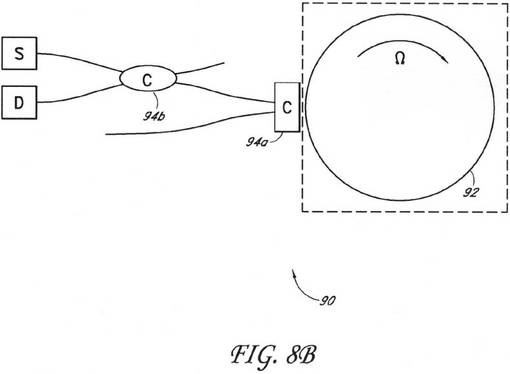
【図8B】本明細書に記載される一部の実施例に係る図8Aの例示的な光ファイバジャイロスコープを逆の構造で概略的に示す図である。
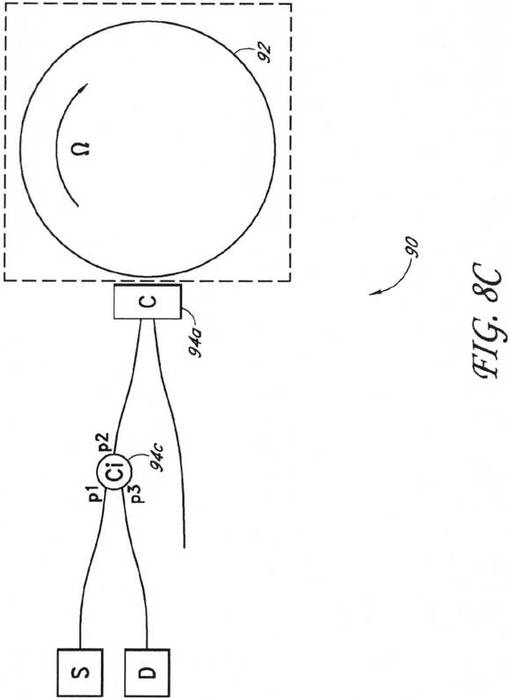
【図8C】本明細書に記載される一部の実施例に係るサーキュレータを用いた図8Aの光ファイバジャイロスコープの別の逆の構造を概略的に示す図である。
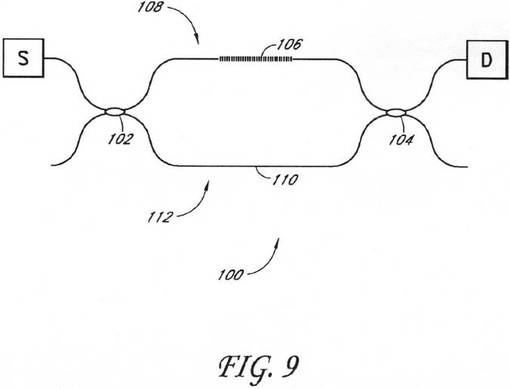
【図9】本明細書に記載される一部の実施例に係るマッハ−ツェンダ構造を有する例示的な光センサを概略的に示す図である。
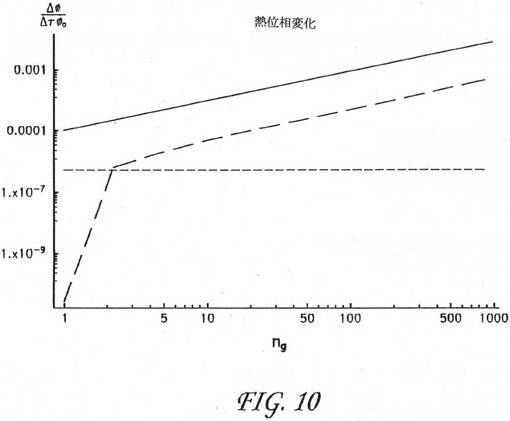
【図10】平均屈折率が1.45である中実ファイバの温度を変化させることによる算出された正規化位相変化のグラフである。
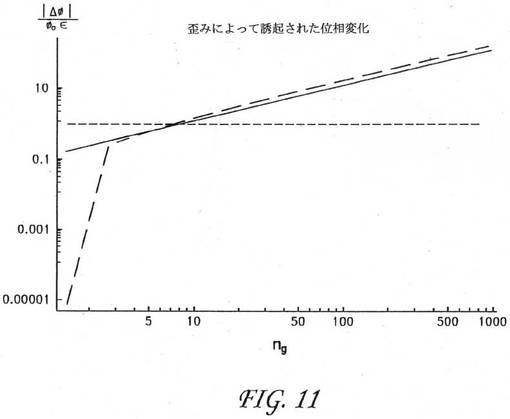
【図11】図10の中実ファイバにおいて歪みを変化させることによる算出された正規化位相変化のグラフである。
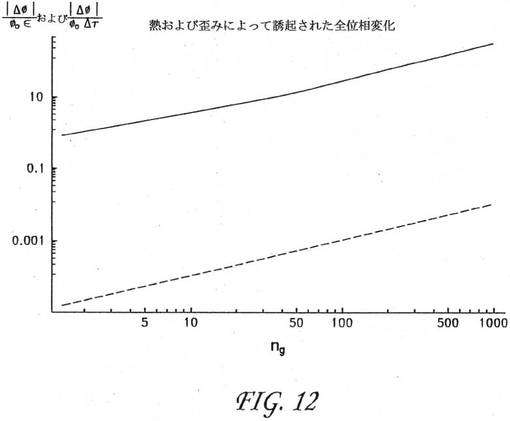
【図12】群屈折率が変動される際の図10の中実コアファイバの歪み感度と熱感度とを比較するグラフである。
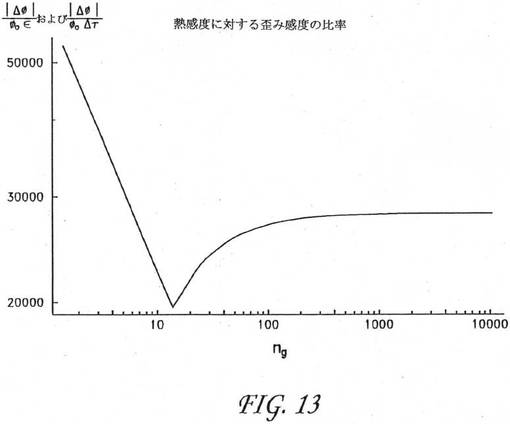
【図13】図10の中実コアファイバの歪みの変化と温度の変化とに対する位相感度の比率のグラフである。
【発明を実施するための形態】
【0009】
詳細な説明
一部の用途において、光ファイバセンサの感度は光ファイバの群屈折率に比例し(すなわち、光ファイバを伝播する光の群速度に逆比例し)、光ファイバセンサを探測するのに低速光を使用すると、感度の上昇が実現される。(たとえば、M. Soljacic, S.G. Johnson, S. Fan, M. Ibansecu, E. Ippen, およびJ.D. Joannopoulos,“Photonic-crystal slow-light enhancement of nonlinear phase sensitivity,”J. Opt. Soc. Am. B, Vol. 19, No. 9, 2052-2059 (2002)参照、全体を引用により本明細書に援用する)。本明細書で使用する限りにおいて、「感度」という用語は最も広い合理的な解釈を有し、限定はしないが、最小検出可能信号の逆数に比例する量を含む。
【0010】
しかし、低速光の使用はすべての光センサにおいて感度の向上に繋がるわけではなく、ある誤った結論に至っている。(たとえば、U. LeonhardtおよびP. Piwnicki,“Ultrahigh sensitivity of slow-light gyroscope,”Phys. Rev. A, Vol. 62, 055801 (2000);G.T. Purves, C.S. AdamsおよびI.G. Hughes, “Sagnac interferometry in a slow-light medium, ”Phys. Rev. A, Vol. 74, 023805 (2006)参照)。
【0011】
一般に、大きな群屈折率によってセンサの感度を向上させるためには、センサが満たすべき条件を把握することが望ましい。感度の低速光向上について、全般的な方策はまだない。本明細書に記載されるように、いくつかのセンサ構造は低速光では向上されない。本明細書に記載される一部の実施例は、特定のファイバセンサおよびファイバセンサ構造、すなわち速度センサ、回転センサ、歪みセンサおよび温度センサを有利に提供し、その感度は低速光の使用によって上昇する。各記載には、センサ設計を支持する物理的な論証および低速光向上が実現される状況を付け加える。
【0012】
本明細書に記載されるように、特に明記しない限り、低速光は、上記で引用した既存の技術のうちの1つまたは開発されるいずれかの技術を使用することによって生成される。たとえば、一部の実施例において、低速光は、ブラッグファイバ(たとえば、C. Lin, W. Zhang, Y. Huang, およびJ. Peng,“Zero dispersion slow light with low leakage loss in defect Bragg fiber,”Appl. Phys. Lett., Vol. 90, 031109 (2007)参照、全体を引用により本明細書に援用する)またはフォトニックバンドギャップファイバを使用して生成される。一部の実施形態において、光導波路は群屈折率ngおよび位相屈折率npを有し、低速光は群速度νgおよび位相速度νpを有する。低速光については、群速度νgは位相速度νp未満である。この条件は、νp/νgの比率またはng/npの比率として規定される減速係数によって表すことができ、低速光について、減速係数は1より大きい(たとえば1.2より大きい、1.5より大きい、2より大きい、5より大きい、10より大きい、15より大きい、20より大きい)。一部の実施例において、低速光が伝播する物質の群屈折率ngは1よりも著しく大きい(たとえば2より大きい、5より大きい、10より大きい、15より大きい、または20より大きい)。一部の実施例において、群速度は真空中の光の速度の50%未満である。一部の実施例において、群速度は真空中の光の速度の20%未満である。一部の実施例において、群速度は真空中の光の速度の10%未満である。このような一部の実施例において、群速度は真空中の光の速度の11分の1〜10分の1の間である。一部の実施例において、群速度は真空中の光の速度の0.01倍〜0.2倍の間である。
【0013】
従来の構造において、光ファイバジャイロスコープ(FOG)において逆に伝播する2つの信号間の時間遅延はΔt=4AΩ/c2であり、Aはジャイロコイルの面積である。この結果は、ジャイロを作製するのに使用されるファイバの群屈折率および位相屈折率の両方に依存しない。(たとえば、H.J. ArdittyおよびH.C. Lefevre,“Sagnac effect in fiber gyroscopes,”Opt. Lett., Vol. 6, No. 8, 401 (1981)参照、全体を引用により本明細書に援用する)。このように、従来のFOGの回転に対する感度は、低速光を利用することによって改善することができない。少なくとも一群の著者は別の方法を示唆している(U. LeonhardtおよびP. Piwnicki,“Ultrahigh sensitivity of slow-light gyroscope,”Phys. Rev. A, Vol. 62, 055801 (2000))が、その後誤りであることが証明された(F. ZimmerおよびM. Fleishhauer, Phys. Rev. Lett., Vol. 92, 253204 (2004) 、全体を引用により本明細書に援用する)。
【0014】
この挙動の理由を理解し、かつ低速光によって向上される回転センサの構造を設計するには、フレネルフィゾー抗力を調べることが有用である。この効果は、移動している物質中を進行する光の位相速度は移動している物質の速度に依存すると定義するものであり、フレネルフィゾー抗力公式によって与えられる。たとえば、物質の静止系において測定された屈折率n(ω)を有する物質が、固定された実験室基準系に対してある線速度νで移動しているものとする。光は、物質の移動のベクトルに平行な方向に沿って、同じ方向または反対方向にこの物質に入射する。以下の説明では、物質の基準系において測定された光の角周波数をωmと称し、実験室基準系において測定されたこの同じ光のドップラー偏移を受けた周波数をωLと称する。
【0015】
実験室基準系において測定された光信号の位相速度νph,Lを表わす同等の方法が2つある(たとえば、H.J. ArdittyおよびH.C. Lefevre,“Sagnac effect in fiber gyroscopes,”Opt. Lett., Vol. 6, No. 8, 401 (1981)参照、全体を引用により本明細書に援用する)。すなわち、
【0016】
【数1】

【0017】
式(2)において、ng(ωL)は、実験室周波数で測定された光の周波数での物質の群屈折率である。式(1)および式(2)の両方において、±の符号は、物質と光とが同じ方向に移動している場合は+と見なされ、反対方向に移動している場合は−と見なされる。式(1)および式(2)は同等であり、相違点は、単に、光周波数が測定される基準系に起因する。式(1)は、物質の基準系において測定された光周波数に関して、実験室基準系における位相速度を与える。式(2)は、実験室基準系において測定された光周波数に関して、実験室基準系における位相速度を与える。式(1)および式(2)は両方とも、移動している物体の速度に位相速度が依存するという概念を表わす。換言すると、光は移動している物質によって「引きずられる」と言うことができる。
【0018】
すべての自由空間、ファイバまたは導波路干渉計において、出力信号は、干渉している2つの信号の相対的な位相に依存する。この位相が、光が伝播しているある物体の速度に依存するという事実を利用することによって、いくつかの干渉速度(および回転)センサを設計することができる。位相速度についてフレネル−フィゾー抗力公式を用いると、異なる干渉計構造で干渉している2つの信号間の時間遅延(および、したがって位相遅延)を求めることが可能である。
【0019】
図1は、干渉流体速度センサ10を概略的に示し、屈折率nの流体12(たとえば液体または気体)が閉鎖された経路(たとえばリング)を一定の速度νで流れる。光源S(たとえばレーザ)からの光14は光結合器16(たとえばビームスプリッタ)によって流体12に結合され、光14の一部分(たとえば第1の信号)がおおむね流体の流れに沿った方向に流体12を伝播し、かつ光14の第2の部分(たとえば第2の信号)が流体の流れとおおむね反対の方向に流体12を伝播するように、(たとえばミラー18によって)方向付けられる。この構造において、光検出器D(たとえばフォトダイオード)に到達する2つの信号間の時間遅延はΔt≒2Pνα′n(ωL)2/c2であり、Pは光14が従う経路の周長である。この構造は、移動している液体における光の速度を判定するためにフィゾーによって使用されたものであり(H. Fizeau, Comp. Rend., Vol. 33, 349 (1851))、この結果は周知である(たとえば、W.R. Leeb, G. SchiffnerおよびE. Scheiterer, “Optical fiber gyroscopes: Sagnac or Fizeau effct,”Appl. Opt., Vol. 18, No. 9, 1293-1295 (1979);E. J. Post,“Sagnac Effect,”Rev. Mod. Phys., Vol. 39, 475 (1967)参照、全体を引用により本明細書に援用する)。移動している流体12の光屈折率がわかれば、この構造を流体の流れの速度センサとして使用することができる。なお、時間遅延はα′に依存し、大きな値の群屈折率ngについては、式(2)で表わされる位相屈折率に対する群屈折率の比率であるng/nに比例する。その結果、図1の構造を有する干渉流体速度センサの感度はΔtに比例し、その中を進行する光の速度の逆数に比例する。したがって、低速光を利用する干渉流体速度センサ10については、光が減速するにつれて、閉鎖された経路を流れる流体の速度に対する感度が高くなる。
【0020】
図2は、干渉接線速度センサ30を概略的に示し、固定された実験室基準系に関してある角周波数Ωで回転する半径Rおよび屈折率nのディスク32を有し、逆の構造で使用されるサニャック干渉計に挿入される。限定はしないが、マッハツェンダー干渉計およびマイケルソン干渉計を含む他の種類の干渉計について同じ解析を行なうことができる。なお、図2によって概略的に示される干渉接線速度センサ30の物理的現象は、図1によって概略的に示される干渉流体速度センサのものと全く同じであり、この構造はフィゾーによっても予測された。
【0021】
この回転または接線速度センサ30において、ディスク32上の点Aおよび点Bの間の距離はLであり、光14の経路はディスク32の接線速度に平行であると想定される(ただし回転感度の必要条件ではなく、代数をわずかに簡略化させるに過ぎない)。結果として生じる時間遅延は、Pの代わりにLを代入し、RΩをνに代入すると、図1に関して述べた干渉流体速度センサ10と同じである。干渉流体速度センサ10の場合のように、接線速度センサ30の感度は低速光の使用によって向上される。特に光源Sと点Aとの間、および検出器Dと点Bとの間を進行する光の部分を置換するために、このようなセンサをすべての自由空間成分で作成することができる、または光ファイバを組込むことができる。図2の概略構造を有するマッハツェンダー型サニャック干渉計が提案されており、解析されている(M.S. Shahriar, G.S. Pati, R. Tripathi, V. Gopal, M. Messall, およびK. Salit,“Ultrahigh enhancement in absolute and relative rotation sensing using fast and slow light,”Phys. Rev. A, Vol. 75, 053807 (2007)参照)。
【0022】
図3は、本明細書に記載される一部の実施例に係る例示的な光センサ40を概略的に示す。光センサ40は、低速光を利用して物質(たとえば光導波路42)の線速度を測定する。光センサ40は、少なくとも1つの光結合器46と、当該少なくとも1つの光結合器46に光学的に連通する光導波路42とを含む。光導波路42は、当該少なくとも1つの光結合器46から第1の光信号を受取るように構成される。第1の光信号は、光導波路42の少なくとも一部分を伝播する間、ある群速度およびある位相速度を有する。群速度は位相速度未満である。第1の光信号と第2の光信号との間の干渉は、光センサ40の少なくとも一部分への摂動によって影響される。
【0023】
図3によって概略的に示されるように、当該少なくとも1つの光結合器46はビームスプリッタを含むことができる。また、当該少なくとも1つの光結合器46は複数のミラー18を含むことができる。一部の実施例において、光導波路42の一部分は、ブラッグファイバ、フォトニックバンドギャップファイバ、または逆の構造で動作するサニャック干渉計に挿入された多層膜積層物を含む。一部の実施例において、群速度は真空中の光の速度の20%未満であるが、他の一部の実施例においては、群速度は真空中の光の速度の10%未満である。一部の実施例において、光導波路42の一部分は固体であるが、他の一部の実施例においては、光導波路42の一部分は流体を含む(たとえばコア内に気体または液体を有する中空光ファイバ)。一部の実施例において、光導波路42の一部分は均質であるが、他の一部の実施例においては、光導波路42の一部分は不均質である。一部の実施例においては、光導波路42の一部分は1より大きい屈折率を有する。
【0024】
一部の実施例において、光センサ40の少なくとも一部分への摂動は、光センサ40の他の部分(たとえば少なくとも1つの光結合器46)に関する光導波路42の移動を含む。このような一部の実施例において、図3に概略的に示されるように、移動は光導波路42の並進を含み、干渉は光導波路42の速度を示す。
【0025】
一部の実施例において、光導波路42は、少なくとも1つの光結合器46から第1の光信号および第2の光信号を受取るように構成される。一部の実施例の光導波路42は、第1の光信号が第1の方向に光導波路42を伝播しかつ第2の光信号が第1の方向とおおむね反対の第2の方向に光導波路42を伝播する間、第1の方向に沿って移動するように構成される。
【0026】
図3の光センサ40は、上述の図1および図2の2つのセンサとは異なる。なぜなら、図3の光センサ40において移動している光導波路42の端点は、実験室基準系においては静止していないからである。光導波路42の少なくとも一部分は屈折率nおよび長さLを有し、速度νで移動している。センサ40を逆に伝播する2つの信号間の時間遅延を算出するためには、ドップラー偏移成分を考慮に入れなければならない。この時間遅延を慎重に解析すると、Δt≒2Ln(ωL)ν[n(ωL)(1−α′)−1]/c2が得られる。限界ng>>n(低速光)において、この時間遅延はng/nの比率に比例し、これは、この光センサ40の感度も低速光の使用によって向上されることを示す。図2について上述した接線速度センサ30とは異なり、図3によって概略的に示される光センサ40の物理的現象は、図1の構造と同等ではない。
【0027】
一部の実施例において、図3によって概略的に示される光センサ40は、光導波路42の線速度を検知する。第1の光路に沿って(たとえば図3の干渉計10を右回りに)進行する第1の光信号は、光導波路42の線速度におおむね平行な方向に光導波路42を伝播し、第2の光路に沿って(たとえば図3の干渉計10を左回りに)進行する第2の光信号は、光導波路42の線速度とおおむね反対の方向に光導波路42を伝播する。光導波路42の線形移動は、検出器Dによって検出される第1の光信号と第2の光信号との間の干渉を修正する。一部の実施例において、光センサ40は、群速度に依存する(たとえば群速度に逆比例する)光導波路42の速度に対する感度を有する。一部の実施例において、光センサ40は、速度が測定されるいずれのシステムでも使用することができ、一部の実施例においては、光センサ40は超小型電気機械システム(MEMS)構造で形成することができる。
【0028】
上述の光速度センサの知識を用いて、従来の光ファイバジャイロスコープ(FOG)50の感度を解析することができる。最も簡単な形態では、図4によって概略的に示されるように、FOG50は(たとえば複数のループを有する)ファイバコイル52、光源S、検出器D、および少なくとも1つの光結合器54を含む。一部の構造において、当該少なくとも1つの光結合器54は、光源Sからの光信号をコイル52に結合するための第1のビームスプリッタまたはファイバ結合器と、コイル52から戻る光信号を検出器Dに入力するための第2のビームスプリッタまたはファイバ結合器とを含む。光源Sは、逆回転する2つの信号をコイル52に送り、コイル52を回って進行した後、検出器Dにおいて再結合される。図4によって概略的に示されるFOG50において、破線で囲まれた箱の中のすべてがコイル52の主対称軸を中心に同じ速度Ωで回転することができ、その他のすべては、固定された実験室基準系に関して静止している。破線で囲まれた箱の中のすべてが回転すると、逆回転する2つの信号は、非可逆性のサニャック効果によって異なる位相偏移を蓄積し、検出器Dにおいて2つの光信号間の干渉を招く。干渉は検出される出力に影響を及ぼし、Ωを示す(たとえば依存する)。
【0029】
少なくとも一人が逆のことを主張している(U. LeonhardtおよびP. Piwnicki,“Ultrahigh sensitivity of slow-light gyroscope,”Phys. Rev. A, Vol. 62, 055801 (2000))にもかかわらず、この従来のFOG50の感度は、FOG50が構成されるファイバのモードの位相屈折率nおよび群屈折率ngの両方に依存しないことが第1原理から明確に証明されている(たとえば、H.J. ArdittyおよびH.C. Lefevre,“Sagnac effect in fiber gyroscopes,”Opt. Lett., Vol. 6, No. 8, 401 (1981)参照、全体を引用により本明細書に援用する)。この非依存性についての物理的な根拠は、上記の式で証明することができるが、コイル52を伝播する光の位相屈折率が変化する(たとえば上昇する)と2つの反対の効果が生じるという点である。一方の効果は、位相屈折率に比例して位相が増大する点である。この効果の結果として、位相屈折率の上昇が、逆に伝播する2つの波の間の回転による微分位相変化の増大に繋がる。他方の効果は、回転方向に進行する光がフレネルフィゾー抗力効果によって引きずられて若干速く進行するが、回転の方向と逆に進行する光は反対の符号によって引きずられ、したがって若干遅く進行するという点である。この効果の結果として、逆に伝播する2つの波の間の回転による微分位相変化が減少する。上掲のH.J. ArdittyおよびH.C. Lefevreは、反対の符号のこれら2つの効果が全く同じ大きさを有し、したがって互いにちょうど打消し合うことを数学的に示している。したがって、図4によって概略的に示される従来のFOG50について、回転感度は位相屈折率に依存しない。ゆえに、その導関数(たとえば群屈折率)および群速度にも依存しない。しかし、以下により詳細に述べるように、群屈折率または群速度が明示的に数式に存在する構造において、光センサは、群屈折率または群速度に依存する感度を呈することができる。
【0030】
図4のFOG50はFOG50の絶対回転の影響を受けやすく、(たとえば航空機における)慣性航法のための商業用途において使用される。以下の例について説明するように、一部の実施例において、図4のものとは若干異なるジャイロスコープ構造が考慮される。これらの他の構造においては、典型的に装置全体が回転する従来のFOG50とは異なり、FOGの異なる部分が互いに対して回転する。これらの他の構造において、FOGは相対的な回転(たとえば装置のある部分の別の部分に関する回転)に対する感度を有する。このような一部の実施例は、(少なくとも1本の回転軸を中心に完全に回転するようにFOGが慣行的に要求される航空機または自動車の慣性航法とは異なり)FOGの一部分に極めて小さい回転のみが加えられる用途について有利に使用される。
【0031】
従来のFOG50の感度は低速光によって変化しないが、上述の光速度センサ40の感度は、群速度νgまたは群屈折率ngに比例させることができる。一部の実施例において、二波干渉計は、物質の基準系において測定されたときに2つの波の周波数が異なる場合、低速光によって影響される感度を有する。換言すると、本明細書に記載される一部の実施例の光センサは、光センサに加えられた摂動に応答して変化する1つ以上の光路長を有する。1つ以上の光路長を変化させる光センサの2つの部分間の相対的な移動を有することによって、本明細書に記載される一部の実施例は、2つの光信号間における周波数のドップラー偏移を呈する。低速光によって向上される感度を有する構造と有さない構造との違いは、次の構造によって示される。低速光によって向上される感度についてのこの同じ基本原則から、さらに多くの実施例を設計することも可能である。
【0032】
図5は、コイル62と少なくとも1つの光結合器64とを有するFOG60を概略的に示す。図5のFOG60について、光源Sおよび検出器Dは慣性基準系に固定され、FOG60の残りは速度Ωで回転する。回転が生じる際、当該少なくとも1つの光結合器64と、光源Sおよび検出器Dとの間の経路長は変化しない(たとえば、光導波路が偏向されるにすぎない)。FOG60は、図4に示される従来のFOG50と全く同様に挙動する。図5の構造にはドップラー偏移は存在せず、当該少なくとも1つの光結合器64がFOG60の有効な光源として機能する。このFOG60は、低速光の恩恵を受ける感度は有していない。
【0033】
図6は、コイル72と少なくとも1つの光結合器74とを有するFOG70を概略的に示す。図6のFOG70について、当該少なくとも1つの光結合器74が点線で囲まれた箱の外に移動される。これは、当該少なくとも1つの光結合器74が光源Sおよび検出器Dと同様に静止していることを示す。回転が生じる際、当該少なくとも1つの光結合器74とコイル72との間の経路長は変化しない(たとえば、光導波路が偏向されるにすぎない)。FOG70も、図4および図5の2つのFOG50およびFOG60と同じように挙動する。当該少なくとも1つの光結合器74から出射する光は点Aまたは点Bのいずれかにおいて測定されるのと同じ周波数を有する。これはこのFOG70が、当該少なくとも1つの光結合器74がループ72と同速回転しているかのように挙動することを意味する。FOG70の感度は群速度および群屈折率に依存せず、低速光の使用の恩恵を受けない。
【0034】
図7Aは、本明細書に記載される一部の実施例に係る例示的なFOG80を概略的に示す。FOG80は、光導波路82(たとえば複数のループを含むファイバコイル)と少なくとも1つの光結合器84(たとえば3dBのファイバ結合器)とを含む。光導波路82は、当該少なくとも1つの光結合器84と光学的に連通している。光導波路82は、当該少なくとも1つの光結合器84から第1の光信号を受取るように構成される。第1の光信号は、光導波路82の少なくとも一部分を伝播する間、ある群速度およびある位相速度を有し、群速度は位相速度未満である。第1の光信号と第2の光信号との間の干渉は、FOG80の少なくとも一部分への摂動によって影響される。
【0035】
一部の実施例において、光導波路82は、互いにおおむね平行な複数のループ(たとえば100個以上のループ)を有するコイル状構造である。光導波路82の少なくとも一部分は低速光伝播を支持し(たとえば、光導波路82の少なくとも一部分はブラッグファイバまたはフォトニックバンドギャップファイバを含み)、一部の実施例において、光導波路82はその全長に沿って低速光伝播を支持する。
【0036】
図7Aに概略的に示されるように、一部の実施例において、FOG80は光源Sおよび検出器Dをさらに含む。光源S、検出器Dおよび一部の実施例の少なくとも1つの光結合器84は静止しており、光導波路82は、光源S、検出器Dおよび当該少なくとも1つの光結合器84に関して移動するように構成される。このような一部の実施例において、摂動は、FOG80の別の部分(たとえば、光源S、検出器Dおよび当該少なくとも1つの光結合器84)に関する光導波路82の回転を含む。このような一部の実施例において、回転は、コイル状の光導波路82の対称軸を中心とする。
【0037】
一部の実施例において、当該少なくとも1つの光結合器84は、当該少なくとも1つの光結合器84と光導波路82とが互いに関して移動することができるように、光導波路82から機械的に分断される。たとえば、一部の実施例において、光導波路82は、図7によって概略的に示されるように、第1の方向に沿って移動する(たとえばコイル状の光導波路82の対称軸を中心に右回りに回転される)ように構成される。この光導波路82の回転中に、当該少なくとも1つの光結合器84からの第1の光信号は、光導波路82を第1の方向に(たとえばコイル状の光導波路82を右回りに)伝播し、当該少なくとも1つの光結合器84からの第2の光信号は、光導波路82を第1の方向とおおむね反対の第2の方向に(たとえばコイル状の光導波路82を左回りに)伝播する。
【0038】
一部の実施例において、図7Aによって概略的に示されるように、少なくとも1つの光結合器84は第1のポート85および第2のポート86を含み、コイル状の光導波路82は第1の端部87および第2の端部88を含む。第1のポート85は第1の端部87に光学的に結合され、第2のポート86は第2の端部88に光学的に結合される。このような一部の実施例において、FOG80は、第1のポート85と第1の端部87との間を進行する光信号が自由空間を伝播するように、第1のポート85と第1の端部87との間に第1の間隙を含む。このような一部の実施例のFOG80は、第2のポート86と第2の端部88との間を進行する光信号が自由空間を伝播するように、第2のポート86と第2の端部88との間に第2の間隙を含む。他の一部の実施例において、FOG80は、長手方向に伸縮可能な第1の光導波路(たとえば、ポリマー材料を含む導波路)を第1のポート85と第1の端部87との間に含み、長手方向に伸縮可能な第2の光導波路を第2のポート86と第2の端部88との間に含む。
【0039】
第1のポート85と第1の端部87との間の領域および第2のポート86と第2の端部88との間の領域の光路長を変化させると、FOG80の感度に著しく影響を及ぼす。このような一部の実施例において、当該システムは、図3に概略的に示される干渉速度センサ40に類似する。Lがコイル状の光導波路82の長さを表わし、ν=RΩが光導波路82の速度を表わすとすると、FOG80について逆に伝播する信号間の時間遅延は干渉速度センサ40についてと同じであり、たとえばΔt≒2Ln(ωL)ν[n(ωL)(1−α′)−1]/c2である。したがって、FOG80は低速光によって有利に向上される感度を有する光センサである。一部の実施例において、FOG80は、群速度または群屈折率に依存するコイル状の光導波路82の回転に対する感度を有する。
【0040】
一部の実施例において、FOG80は、加えられる回転が有限の偏位を有する用途において実用回転センサとして使用して、たとえば海上プラットフォームまたは建物などの大きな構造の屈曲を検出する、またはバルク光干渉計のミラーなどの機械部品の移動を検出することができる。コイル状の光導波路82が回転するにつれて、少なくとも1つの光結合器84の第1のポート85とコイル状の光導波路82の第1の端部87との間の第1の光路長が変化し、少なくとも1つの光結合器84の第2のポート86とコイル状の光導波路82の第2の端部88との間の第2の光路長が変化する。FOG80は、第1の光路長、第2の光路長、または第1の光路長および第2の光路長の両方の変化に応答する。
【0041】
図7Bは、第1のファイバ結合器84aと第2のファイバ結合器84bとを含む少なくとも1つの光結合器を利用した、図7AのFOG80の逆の構造を概略的に示す。図7Cは、第1のファイバ結合器84aと、ポートp1、p2およびp3を有する3ポートサーキュレータ84cとを含む少なくとも1つの光結合器84を利用した、図7AのFOG80の別の逆の構造を概略的に示す。光結合器の他の構造は、本明細書に記載されるさまざまな実施例にも対応する。
【0042】
図8Aは、本明細書に記載される一部の実施例に係る別の例示的なFOG90を概略的に示す。図8AのFOG90は、(たとえば、少なくとも一部分がブラッグファイバまたはフォトニックバンドギャップファイバを含む)コイル状の光導波路92と、光導波路92にエバネッセント結合された少なくとも1つの光結合器94(たとえばプリズム結合器)とを含み、光導波路92は、当該少なくとも1つの光結合器94に関して回転する。FOG90は、流れる流体12を回転する光導波路92で置換し、かつ固定ビームスプリッタ16を当該少なくとも1つの光結合器94(たとえばプリズム結合器)で置換すれば、図1に示される光センサ10と類似している。上述のように、干渉流体速度センサ10は流体の群屈折率に依存する感度を有し、低速光の使用によって感度の向上がもたらされる。図8AのFOG90は、光導波路92における光の群屈折率または群速度に依存する感度を有し、低速光の使用によって感度の向上がもたらされる。
【0043】
図8Bは、少なくとも1つの光結合器94が第1の結合器94aおよび第2の結合器94bを含む逆の構造のFOG90を概略的に示す。このような一部の実施例において、サニャックループから戻る光は逆の出力ポートにおいて収集される。光はこのポートからループに入射する。(たとえば、H. Lefevre, The Fiber-Optic Gyroscope, Artech House, Boston, Ch. 3, 1993参照、全体を引用により本明細書に援用する)。これは、図8Bに概略的に示されるように、結合器(たとえばファイバ結合器)を光入力ポートに配置しかつ結合器の第4のポートにおいて反射光を収集することによって、直接的に行なうことができる。他の一部の実施例においては、本明細書に記載される光センサに対して、逆の動作を行うように同様の変更を加えることができ、光センサの安定性を改善することに繋がる。図8Cは、第1のファイバ結合器94aと、ポートp1、p2およびp3を有する3ポートサーキュレータ94cとを含む少なくとも1つの光結合器94を利用した、図8AのFOG90の別の逆の構造を概略的に示す。光結合器の他の構造は、本明細書に記載されるさまざまな実施例にも対応する。
【0044】
図8Aから図8CのFOG90は、図7Aから図7CのFOG80と同種の用途を有することができる。一部の実施例において、少なくとも1つの光結合器94は、当該少なくとも1つの光結合器94と光導波路92とが互いに関して移動するように、光導波路92に対しておおむね垂直な軸を中心に回転する。FOG90は、当該少なくとも1つの光結合器94と光導波路92との間の相対的な回転に応答する。
【0045】
低速光の使用によって向上させることができる他の種類のセンサは、ファイバ歪みセンサおよび温度センサである。下記のように、長手方向の歪みの変化および温度の変化に対する、(単純で均質な円柱状ロッドとしてモデリングされる)理想化されたファイバの位相感度が同時に考慮される。これらの算出において、ファイバの断面はその長さに沿って均一であり、低速光はファイバの横方向の構造に起因する(たとえば、C. Lin, W. Zhang, Y. HuangおよびJ. Peng,“Zero dispersion slow light with low leakage loss in defect Bragg fiber,”Appl. Phys. Lett., Vol. 90, 031109 (2007)参照、全体を引用により本明細書に援用する)。温度および歪みの両方は、3つの方法でファイバに影響を及ぼす。すなわち、長手方向の寸法を変化させ、横方向の寸法を変化させ、かつ屈折率を変化させる。これらの変化は、より詳細に以下に説明される。
【0046】
光導波路(たとえばファイバ)の長さが(たとえば温度変化または歪みを加えることによって)L0からL0+ΔLに変更された場合、導波路を伝播する波長λの信号の位相における変化は、ΔΦL=2πneffΔL/λによって表わすことができる。長さの変化が温度変化ΔTによって誘起される場合、ΔLは導波路の熱膨張によってΔL=αL0ΔTとして表わすことができる。αは導波路の熱膨張係数である。長さの変化が長手方向の歪みεによって誘起される場合、長さの変化は、ΔL=εL0によって表わすことができる。これらの効果はいずれも群屈折率または群速度に依存せず、したがって、光センサは導波路の長さの変化に応答することができるが、このような変化に対する光センサの感度は低速光の使用によって向上されない。
【0047】
導波路モードが有効屈折率n(λ)を有するものとする。導波路の横方向の寸法が係数(1+δ)によって(たとえば歪みまたは温度変化のいずれかによって生じるように)均一に変倍されると、モードの有効屈折率も変倍され、neff(λ(1+δ))となる。つまり、変倍された導波路のモードは、当初の導波路が波長λにおいて有していたのと同じ有効屈折率を波長(1+δ)λにおいて有する。これは、信号周波数が一定であったとしても、信号の有効(正規化)周波数は導波路の横方向寸法の変化に起因して変化するということを意味する。このため、群屈折率が有効屈折率に出現し、すなわちΔneff=(ng−neff)δであり、ゆえに、
【0048】
【数2】
【0049】
となる。横方向の寸法が温度変化によって変化する場合は、δ=αΔTである。横方向寸法の変化が長手方向の歪みεによって誘起される場合は、δ=−ενである。νは導波路のポアソン比である。したがって、一部の実施例において、歪みおよび温度変化のいずれかに対する導波路の感度は、導波路を伝播する光の群屈折率または群速度に依存し、低速光を使用することによって、より高感度の温度または歪みファイバセンサを有利に実現することができる。
【0050】
図9は、本明細書に記載される一部の実施例に係るマッハツェンダー構造を有する例示的な光センサ100を概略的に示す。光センサ100は、少なくとも1つの光結合器(たとえば第1の光結合器102および第2の光結合器104)と、当該少なくとも1つの光結合器に光学的に連通する(たとえば光センサ100の検知アーム108の)光導波路106とを含む。光導波路106は、当該少なくとも1つの光結合器から第1の光信号(たとえば光源Sから第1の光結合器102によって受取られた光信号の第1の部分)を受取るように構成される。第1の光信号は、光導波路106の少なくとも一部分を伝播する間、ある群速度およびある位相速度を有し、群速度は位相速度未満である。第1の光信号と第2の光信号との間の干渉は、光導波路106に加えられる摂動(たとえば長手方向の歪みの変化、温度の変化)によって影響される。
【0051】
一部の実施例において、図9によって概略的に示されるように、第2の光信号は、光源Sから第1の光結合器102によって受取られた光信号の第2の部分を含む。第2の光信号は、光センサ100の基準アーム112の(たとえば位相速度と等しい群速度を有する)従来の光導波路110を伝播する。第1の光信号および第2の光信号は第2の光結合器104によって受取られ、第1の光信号と第2の光信号との間の干渉が検出器Dによって検出される。一部の実施例において、摂動に対する光センサ100の感度は、群速度に逆比例する。
【0052】
(弾性光学効果による)歪みまたは(熱光学効果による)温度変化のいずれかを加えることで、導波路の屈折率を変化させることができる。物質の屈折率の変化Δnについては、有効モード屈折率neffの変化はΔneff=(ng/neff)σΔnである(たとえば、M. Soljacic, S.G. Johnson, S. Fan, M. Ibansecu, E. Ippen, およびJ.D. Joannopoulos,“Photonic-crystal slow-light enhancement of nonlinear phase sensitivity,”J. Opt. Soc. Am. B, Vol. 19, No. 9, 2052-2059 (2002)参照、全体を引用により本明細書に援用する)。σは、屈折率が変更される物質を伝わるモード出力の分数(fraction)を示す。これは、位相変化ΔΦT=2π(L/λ)(ng/neff)σΔnに繋がる。熱光学効果についてはΔn=γΔTであり、γは熱光学係数である。
【0053】
しかし実際の光ファイバにおける全体像は、この単純な解析よりもはるかに複雑である。光ファイバは一般にいくつかの物質で構成されており、各々が異なる機械特性および熱特性を有する。たとえば、従来の単一モードファイバにおいて、コア、クラッディングおよびジャケットはすべて異なる機械特性および熱特性を有する。同様に、フォトニックバンドギャップファイバにおいて、コア、格子、シリカクラッディング、およびアクリル酸塩ジャケットは異なる特性を有する。ブラッグファイバにも同じことが当てはまり、異なる特性の物質からなる。したがって、実際のファイバの温度を変化させると、異なる物質が異なって膨張し、ファイバにおいて非均一的な熱誘起された歪みを招く。このような一部の実施例において、これらの歪みは、弾性光学効果によってさまざまな物質の屈折率に摂動を生じさせ、ひいてはファイバの有効屈折率を変化させる。空心フォトニックバンドギャップファイバ(PBF)におけるこれらの効果の広範な解析は、たとえば、V. Dangui, H.K. Kim, M.J.F. Digonnet, およびG.S. Kino,“Phase sensitivity to temperature of the fundamental mode in air-guiding photonic-bandgap fibers,”Opt. Express, Vol. 13, No. 18, 6669-6684 (2005)によってもたらされ、全体を引用により本明細書に援用する。実際のファイバは本明細書に記載される簡略化された1次モデルよりも複雑であり、何らかの相違が予期されるものの、これらの算出の結果は実際の光センサシステムの全般的な特性を予測するのに有益である。
【0054】
たとえば、空心のブラッグファイバを含む光導波路について(たとえば、V. Dangui, H.K. Kim, M.J.F. Digonnet, およびG.S. Kino,“Phase sensitivity to temperature of the fundamental mode in air-guiding photonic-bandgap fibers,”Opt. Express, Vol. 13, No. 18, 6669-6684 (2005)によって述べられているように)、歪みの縦方向成分は(同じクラッディング厚さおよび物質を有する)従来のファイバよりも若干大きい。歪みの横方向成分は、ファイバ断面のより複雑かつ異質な性質に起因して、より複雑な温度の関数である。上述のように、この歪みの横方向成分は、その複雑さから本明細書に記載されるモデリングには含まれなかった。しかし、上掲のDangui他によって空心フォトニックバンドギャップファイバ(PBF)について算出されたものであり、若干弱い。空心ブラッグファイバの場合には、若干の減少に向けて同様の傾向が予期される。また、空心ブラッグファイバにおいては、空気の熱光学係数が固体よりもはるかに小さいことから、熱光学項目ははるかに小さい。この結果は光の群速度には依存しない。この項目は空気においては非常に弱いため、空心PBFにおける温度による全位相変化の多くの部分が従来のファイバよりも理論的かつ実験的に著しく小さいと示されている(上掲のDangui他参照)。たとえば、Dangui他によって研究された特定のPBF(デンマーク国、Crystal Fibre社から購入)においては、温度に対する位相の温度依存度の低下は約7分の1である。この空心PBFと類似しているため、同様の傾向が空心ブラッグファイバについて予期される。したがって、空心ブラッグファイバを使用して光センサにおいて低速光を生成し感度を向上させる別の利点は、モードが主に空気中において誘導されることから、温度感度が低下する(たとえば3分の1以上)点である。
【0055】
上述のように、一部の実施例では、歪みを加えるとファイバの屈折率に変化が生じ、ファイバの有効モード屈折率が変化する。熱によって誘起される歪みの場合のように、異なる機械特性を有するいくつかの物質で構成される実際のファイバにおける歪み形状の算出は複雑である。この解析をいくらか簡略化するために、従来の単一モード中実ファイバにおける歪みの効果を考慮することができる(たとえば、G.B. Hocker,“Fiber-optic sensing of pressure and temperature,”Appl. Opt., Vol. 18, No. 19, 1445 (1979)参照、全体を引用により本明細書に援用する)。現在のところ、従来のファイバにおいて低速光を誘起するための既知の方法はないものの、この解析は一般的な傾向を導出するために参考になる。
【0056】
従来の単一モードファイバにおける歪みによって誘起される屈折率変化はΔn=−n3[ε(1−μ)p12−μεp11]/2であり、p11およびp12は歪み光テンソルの成分である。シリカについては、p11=0.121かつp12=0.27である。上記から公式Δneff=(ng/neff)σΔnを用いると、中実ファイバにおける有効屈折率の変化をさまざまな値のneffおよびngについて算出することができる。
【0057】
ファイバの歪みおよび熱位相感度がどのように群屈折率に依存するかについての数値例を得るために、平均屈折率n=1.45である中実ファイバの場合を考える。ファイバのすべての部分の機械特性が同じである(たとえばジャケットがない)と想定することによって熱膨張の解析が簡略化され、歪みによって誘起される屈折率変化が上記の数式によって与えられる。ファイバの熱特性または機械特性を変化させることなく群屈折率を自由に変化させることができる(ngは自由変数として扱われる)とも想定される。簡略化のために、ファイバの中実物質内を伝えられる出力のすべてに対応してσ=1と想定される。
【0058】
図10は、このファイバの温度を変化させることによる正規化された位相変化をグラフ化したものである。実線は熱光学効果によって引起される位相変化であり、破線はファイバの横方向膨張に起因する位相変化であり、点線はファイバの縦方向膨張による位相変化である。上記の導関数によれば、ngが大きいとき、熱光学位相遅延および横方向膨張位相遅延の両方が向上を呈する。
【0059】
図11は、図10について使用したのと同じファイバに加えられた歪みを変化させることによる正規化された位相変化をグラフ化したものである。実線の曲線は熱光学効果によって引起される位相変化であり、破線の曲線はファイバの横方向寸法の変化に起因し、点線の曲線はファイバの縦方向膨張による位相変化である。さまざまな効果を対数の対数スケールで比較するために、すべてが同じ符号を有するとは限らないが、各相変化の絶対値がグラフ化されている。図10にグラフ化された熱位相感度について示したように、屈折率および横方向寸法の変化に起因する図11にグラフ化された項目も、ngが大きいときは、ngが増大するにつれて向上を呈する。
【0060】
図12は、群屈折率が変動される際の中実ファイバの歪み感度と熱感度とを比較するグラフである。歪み応答(実線)および温度応答(破線)は両方とも、群屈折率が上昇するにつれて感度が上昇することを示す。図13は、歪みと温度とに対する位相感度の比率のグラフである。図13に示すように、熱感度に対する歪みの比率は約10〜11の間のngについて最小化され、ngがこの範囲よりも大きくなるにつれて(より低速な光)2つの感度の比率は一定となる。これは、ngに比例する項目が優勢であるためである。この算出は、理想化された均質な中実ファイバについて行なわれたが、光センサの歪み感度の低速光向上が光センサの温度感度の低速光向上に比べて低下する範囲の値の群屈折率の全体的な現象を示すものである。一部の実施例において、群屈折率は、温度感度に対して所定の比率の歪み感度をもたらすように選択される。
【0061】
たとえば、図12および図13に示すように、中実ファイバ(σ=1)を有する歪みセンサについては、どの値のngによっても歪み感度は熱感度を超えて大幅に上昇されない。したがって、一部の実施例において、中実ファイバを有する歪みセンサは、低い群屈折率を有利に有する。しかし、温度センサについては逆が当てはまる。すなわち、10〜11の間のngについて熱感度が歪み感度と比較して最大となる。この範囲の群屈折率においては、歪みに対する熱センサの感度が有利に低下する。したがって、一部の実施例において、中実ファイバを有する温度センサは、10〜11の間の群屈折率を有利に有する。空心ブラッグファイバを含む空心ファイバは、温度感度に対して所定の比率の歪み感度をもたらすように群屈折率を選択できるように、同様の挙動を呈するものと予期される(ただし実際の群屈折率値は、中実ファイバについて上述したものとは異なることになる)。
【0062】
低速光によって向上される(特定の測定量に対する)感度を有すると本明細書で特定されたファイバセンサのうち、すべてではないにせよ少なくとも一部は、低速光によって向上される温度に対する感度も有する。この特徴は、光センサを特定の測定量に適合させるために光センサの設計および製造において考慮することができる。一部の実施例において、第1の測定量(たとえば歪み)の変化に対する第1の感度と第2の測定量(たとえば温度)の変化に対する第2の感度とを有する光センサが製造される。当該方法は、光がある群速度およびある位相速度で伝播するように構成された光導波路を提供するステップを含み、群速度は位相速度未満である。第1の感度の第1の向上および第2の感度の第2の向上は両方とも、光導波路の群屈折率に依存する。当該方法はさらに、第1の向上が第2の向上を上回るように群屈折率を選択するステップを含む。
【0063】
一部の実施例において、温度とは異なる測定量に対する感度を向上させるのに低速光を用いる光センサは、多くの既存の技術のうちの1つ(たとえば、光センサ、特に低速光が伝播する光導波路の安定した温度を維持すること)もしくは開発される技術を用いて、温度感度の上昇効果を有利に補正するかまたは他の方法で低減させる。たとえば、群屈折率が約10〜11よりも大きい中実ファイバを用いた歪みファイバセンサの一部の実施例においては、温度に対する感度と同じように、光の減速とともに歪みに対する感度が低下する。温度に対するこの依存度は有益ではないが、利用可能な技術を用いることによってその効果を補正するかまたは他の方法で低減することができ、歪みに対する感度の上昇は極めて有益となり得る。
【0064】
逆に、他の一部の実施例においては、低速光ファイバを有する非常に高感度の温度センサを有益に作製することができる。たとえば、一部の実施例の光センサは、約10〜11の間の群屈折率を有する中実ファイバを使用し、それによって温度に対する感度を上昇させ、歪み感度は相対的に低下する。このような一部の実施例においては、歪みの効果を制御することが望ましい。これは、多くの既存の技術のうちの1つ(たとえば、誘起される歪みの変化が低減されるように、光センサ、特に光センサの低速光が伝播する部を、熱膨張係数が小さい物質上に搭載すること)を使用することによっても、または開発される技術によっても、歪みに対する感度が向上されることになるためである。
【0065】
さまざまな実施例を上述した。本発明をこれらの特定の実施例に関して記載したが、当該記載は本発明を例示するためのものであり、限定するためのものではない。請求項によって規定される本発明の精神および範囲から逸脱することなく、当業者はさまざまな修正および用途に想到し得る。
【技術分野】
【0001】
関連出願との相互参照
本願は、2007年6月15日出願の米国仮出願番号第60/944,396号の優先権を主張し、全体を引用により本明細書に援用する。
【0002】
背景
分野
本願は概して光センサに関し、特に光ファイバセンサに関する。
【背景技術】
【0003】
関連技術の説明
近年、真空中の光の速度よりも著しく低くなるように光の群速度を大幅に低下させる(「低速光」と称する)ことが注目されている。電子誘導透過(たとえば、S. E. Harris, “Electromagnetically induced transparency,”Phys. Today, Vol. 50, No. 7, 36-42 (1997)参照)、ブラッグファイバ(たとえば、C. Lin, W. Zhang, Y. Huang, およびJ. Peng,“Zero dispersion slow light with low leakage loss in defect Bragg fiber,”Appl. Phys. Lett., Vol. 90, 031109 (2007)参照)、ならびに結合共振器アレイ(たとえば、A. Yariv, Y. Xu, R.K. Lee, およびA. Scherer,“Coupled resonator optical waveguide: a proposal and analysis,”Opt. Lett., Vol. 24, No. 11, 711-713 (1997)参照)などのシステムはすべて、光の群速度の大きさを数桁低下させることを示している。これらの各文献の全体を引用により本明細書に援用する。また、低速光はフォトニックバンドギャップ構造において研究されている。(たとえば、M. Soljacic, S.G. Johnson, S. Fan, M. Ibansecu, E. Ippen, およびJ.D. Joannopoulos,“Photonic-crystal slow-light enhancement of nonlinear phase sensitivity,”J. Opt. Soc. Am. B, Vol. 19, No. 9, 2052-2059 (2002);2005年7月12日発行の米国特許番号第6,917,431号“Mach-Zehnder interferometer using photonic band gap crystals”;2006年10月3日発行の米国特許番号第7,116,864号“Stopping and time reversing light in a waveguide with an all-optical system”;M.F. YanikおよびS. Fan,“Stopping light all-optically,”Phys. Rev. Lett., Vol. 92, 083901(2004);M.F. Yanik, W. Suh, Z. WangおよびS. Fan,“Stopping light in a waveguide with an all-optical analogue of electromagnetic induced transparency,”Phys. Rev. Lett., Vol. 93, 233903 (2004);M.F. YanikおよびS. Fan, “Stopping and storing light coherently,”Phys. Rev. A, Vol. 71, 013803 (2005);S. Sandhu, M.L. Povinelli, M.F. YanikおよびS. Fan,“Dynamically-tuned coupled resonator delay lines can be nearly dispersion free,”Optics Lett., Vol. 31, 1985-1987 (2006)参照。各々の全体を引用により本明細書に援用する。)
【発明の概要】
【課題を解決するための手段】
【0004】
概要
一部の実施例において、光センサは、少なくとも1つの光結合器と、当該少なくとも1つの光結合器に光学的に連通する光導波路とを含む。光導波路は、当該少なくとも1つの光結合器から第1の光信号を受取るように構成される。第1の光信号は、光導波路の少なくとも一部分を伝播する間、ある群速度およびある位相速度を有し、群速度は位相速度未満である。第1の光信号と第2の光信号との間の干渉は、光センサの少なくとも一部分への摂動によって影響される。
【0005】
一部の実施例において、光センサは、少なくとも1つの光結合器と、当該少なくとも1つの光結合器から第1の光信号および第2の光信号を受取るように構成された光導波路とを含む。光はある群速度およびある位相速度で光導波路の少なくとも一部分を伝播し、群速度は位相速度未満である。光導波路は、第1の光信号が第1の方向に光導波路を伝播しかつ第2の光信号が第1の方向とおおむね反対の第2の方向に光導波路を伝播する間、第1の方向に沿って移動するように構成される。第1の光信号と前記第2の光信号との間の干渉は、光センサの少なくとも一部分への摂動によって影響される。
【0006】
一部の実施例において、光センサは、光源から光を受取りかつ光を光検出器に伝えるように構成されたファイバ結合器を含む。光センサはさらに、ファイバ結合器に光学的に結合されたファイバコイルを含む。ファイバコイルの少なくとも一部分は、ある群速度およびある位相速度で光が伝播する光ファイバを含み、群速度は位相速度未満である。ファイバコイルおよびファイバ結合器の少なくとも一方は、ファイバコイルの第1の部分とファイバ結合器との間の第1の光路長が増大し、かつファイバコイルの第2の部分とファイバ結合器との間の第2の光路長が減少するように、他方に関して移動するように構成される。光源からファイバ結合器によって受取られた光の第1の部分は、ファイバ結合器から第1の方向にファイバコイルを伝播してファイバ結合器に戻り、光源からファイバ結合器によって受取られた光の第2の部分は、ファイバ結合器から第1の方向と反対の第2の方向にファイバコイルを伝播してファイバ結合器に戻る。光の第1の部分および光の第2の部分は、光検出器に伝播しかつ互いに干渉し、光の第1の部分と光の第2の部分との間の干渉は、ファイバ結合器に関するファイバコイルの移動を示す。
【0007】
一部の実施例において、方法は、第1の測定量の変化に対する第1の感度と第2の測定量の変化に対する第2の感度とを有する光センサを製造する。当該方法は、光がある群速度およびある位相速度で伝播するように構成された光導波路を供給するステップを含み、群速度は位相速度未満である。第1の感度の第1の向上は光導波路の群屈折率に依存し、第2の感度の第2の向上は群屈折率に依存する。当該方法はさらに、第1の向上が第2の向上を上回るように群屈折率を選択するステップを含む。
【図面の簡単な説明】
【0008】
【図1】干渉流体速度センサを概略的に示す図である。
【図2】干渉接線速度センサを概略的に示す図である。
【図3】本明細書に記載される一部の実施例に係る例示的な光センサを概略的に示す図である。
【図4】従来の光ファイバジャイロスコープ(FOG)を概略的に示す図である。
【図5】静止した光源および検出器を有する光ファイバジャイロスコープを概略的に示す図である。
【図6】静止した光源、検出器および結合器を有する光ファイバジャイロスコープを概略的に示す図である。
【図7A】本明細書に記載される一部の実施例に係る例示的な光ファイバジャイロスコープを概略的に示す図である。
【図7B】本明細書に記載される一部の実施例に係る図7Aの光ファイバジャイロスコープの逆の構造を概略的に示す図である。
【図7C】本明細書に記載される一部の実施例に係るサーキュレータを用いた図7Aの光ファイバジャイロスコープの別の逆の構造を概略的に示す図である。
【図8A】本明細書に記載される一部の実施例に係るプリズム結合器および回転ファイバコイルを含む別の例示的な光ファイバジャイロスコープを概略的に示す図である。
【図8B】本明細書に記載される一部の実施例に係る図8Aの例示的な光ファイバジャイロスコープを逆の構造で概略的に示す図である。
【図8C】本明細書に記載される一部の実施例に係るサーキュレータを用いた図8Aの光ファイバジャイロスコープの別の逆の構造を概略的に示す図である。
【図9】本明細書に記載される一部の実施例に係るマッハ−ツェンダ構造を有する例示的な光センサを概略的に示す図である。
【図10】平均屈折率が1.45である中実ファイバの温度を変化させることによる算出された正規化位相変化のグラフである。
【図11】図10の中実ファイバにおいて歪みを変化させることによる算出された正規化位相変化のグラフである。
【図12】群屈折率が変動される際の図10の中実コアファイバの歪み感度と熱感度とを比較するグラフである。
【図13】図10の中実コアファイバの歪みの変化と温度の変化とに対する位相感度の比率のグラフである。
【発明を実施するための形態】
【0009】
詳細な説明
一部の用途において、光ファイバセンサの感度は光ファイバの群屈折率に比例し(すなわち、光ファイバを伝播する光の群速度に逆比例し)、光ファイバセンサを探測するのに低速光を使用すると、感度の上昇が実現される。(たとえば、M. Soljacic, S.G. Johnson, S. Fan, M. Ibansecu, E. Ippen, およびJ.D. Joannopoulos,“Photonic-crystal slow-light enhancement of nonlinear phase sensitivity,”J. Opt. Soc. Am. B, Vol. 19, No. 9, 2052-2059 (2002)参照、全体を引用により本明細書に援用する)。本明細書で使用する限りにおいて、「感度」という用語は最も広い合理的な解釈を有し、限定はしないが、最小検出可能信号の逆数に比例する量を含む。
【0010】
しかし、低速光の使用はすべての光センサにおいて感度の向上に繋がるわけではなく、ある誤った結論に至っている。(たとえば、U. LeonhardtおよびP. Piwnicki,“Ultrahigh sensitivity of slow-light gyroscope,”Phys. Rev. A, Vol. 62, 055801 (2000);G.T. Purves, C.S. AdamsおよびI.G. Hughes, “Sagnac interferometry in a slow-light medium, ”Phys. Rev. A, Vol. 74, 023805 (2006)参照)。
【0011】
一般に、大きな群屈折率によってセンサの感度を向上させるためには、センサが満たすべき条件を把握することが望ましい。感度の低速光向上について、全般的な方策はまだない。本明細書に記載されるように、いくつかのセンサ構造は低速光では向上されない。本明細書に記載される一部の実施例は、特定のファイバセンサおよびファイバセンサ構造、すなわち速度センサ、回転センサ、歪みセンサおよび温度センサを有利に提供し、その感度は低速光の使用によって上昇する。各記載には、センサ設計を支持する物理的な論証および低速光向上が実現される状況を付け加える。
【0012】
本明細書に記載されるように、特に明記しない限り、低速光は、上記で引用した既存の技術のうちの1つまたは開発されるいずれかの技術を使用することによって生成される。たとえば、一部の実施例において、低速光は、ブラッグファイバ(たとえば、C. Lin, W. Zhang, Y. Huang, およびJ. Peng,“Zero dispersion slow light with low leakage loss in defect Bragg fiber,”Appl. Phys. Lett., Vol. 90, 031109 (2007)参照、全体を引用により本明細書に援用する)またはフォトニックバンドギャップファイバを使用して生成される。一部の実施形態において、光導波路は群屈折率ngおよび位相屈折率npを有し、低速光は群速度νgおよび位相速度νpを有する。低速光については、群速度νgは位相速度νp未満である。この条件は、νp/νgの比率またはng/npの比率として規定される減速係数によって表すことができ、低速光について、減速係数は1より大きい(たとえば1.2より大きい、1.5より大きい、2より大きい、5より大きい、10より大きい、15より大きい、20より大きい)。一部の実施例において、低速光が伝播する物質の群屈折率ngは1よりも著しく大きい(たとえば2より大きい、5より大きい、10より大きい、15より大きい、または20より大きい)。一部の実施例において、群速度は真空中の光の速度の50%未満である。一部の実施例において、群速度は真空中の光の速度の20%未満である。一部の実施例において、群速度は真空中の光の速度の10%未満である。このような一部の実施例において、群速度は真空中の光の速度の11分の1〜10分の1の間である。一部の実施例において、群速度は真空中の光の速度の0.01倍〜0.2倍の間である。
【0013】
従来の構造において、光ファイバジャイロスコープ(FOG)において逆に伝播する2つの信号間の時間遅延はΔt=4AΩ/c2であり、Aはジャイロコイルの面積である。この結果は、ジャイロを作製するのに使用されるファイバの群屈折率および位相屈折率の両方に依存しない。(たとえば、H.J. ArdittyおよびH.C. Lefevre,“Sagnac effect in fiber gyroscopes,”Opt. Lett., Vol. 6, No. 8, 401 (1981)参照、全体を引用により本明細書に援用する)。このように、従来のFOGの回転に対する感度は、低速光を利用することによって改善することができない。少なくとも一群の著者は別の方法を示唆している(U. LeonhardtおよびP. Piwnicki,“Ultrahigh sensitivity of slow-light gyroscope,”Phys. Rev. A, Vol. 62, 055801 (2000))が、その後誤りであることが証明された(F. ZimmerおよびM. Fleishhauer, Phys. Rev. Lett., Vol. 92, 253204 (2004) 、全体を引用により本明細書に援用する)。
【0014】
この挙動の理由を理解し、かつ低速光によって向上される回転センサの構造を設計するには、フレネルフィゾー抗力を調べることが有用である。この効果は、移動している物質中を進行する光の位相速度は移動している物質の速度に依存すると定義するものであり、フレネルフィゾー抗力公式によって与えられる。たとえば、物質の静止系において測定された屈折率n(ω)を有する物質が、固定された実験室基準系に対してある線速度νで移動しているものとする。光は、物質の移動のベクトルに平行な方向に沿って、同じ方向または反対方向にこの物質に入射する。以下の説明では、物質の基準系において測定された光の角周波数をωmと称し、実験室基準系において測定されたこの同じ光のドップラー偏移を受けた周波数をωLと称する。
【0015】
実験室基準系において測定された光信号の位相速度νph,Lを表わす同等の方法が2つある(たとえば、H.J. ArdittyおよびH.C. Lefevre,“Sagnac effect in fiber gyroscopes,”Opt. Lett., Vol. 6, No. 8, 401 (1981)参照、全体を引用により本明細書に援用する)。すなわち、
【0016】
【数1】
【0017】
式(2)において、ng(ωL)は、実験室周波数で測定された光の周波数での物質の群屈折率である。式(1)および式(2)の両方において、±の符号は、物質と光とが同じ方向に移動している場合は+と見なされ、反対方向に移動している場合は−と見なされる。式(1)および式(2)は同等であり、相違点は、単に、光周波数が測定される基準系に起因する。式(1)は、物質の基準系において測定された光周波数に関して、実験室基準系における位相速度を与える。式(2)は、実験室基準系において測定された光周波数に関して、実験室基準系における位相速度を与える。式(1)および式(2)は両方とも、移動している物体の速度に位相速度が依存するという概念を表わす。換言すると、光は移動している物質によって「引きずられる」と言うことができる。
【0018】
すべての自由空間、ファイバまたは導波路干渉計において、出力信号は、干渉している2つの信号の相対的な位相に依存する。この位相が、光が伝播しているある物体の速度に依存するという事実を利用することによって、いくつかの干渉速度(および回転)センサを設計することができる。位相速度についてフレネル−フィゾー抗力公式を用いると、異なる干渉計構造で干渉している2つの信号間の時間遅延(および、したがって位相遅延)を求めることが可能である。
【0019】
図1は、干渉流体速度センサ10を概略的に示し、屈折率nの流体12(たとえば液体または気体)が閉鎖された経路(たとえばリング)を一定の速度νで流れる。光源S(たとえばレーザ)からの光14は光結合器16(たとえばビームスプリッタ)によって流体12に結合され、光14の一部分(たとえば第1の信号)がおおむね流体の流れに沿った方向に流体12を伝播し、かつ光14の第2の部分(たとえば第2の信号)が流体の流れとおおむね反対の方向に流体12を伝播するように、(たとえばミラー18によって)方向付けられる。この構造において、光検出器D(たとえばフォトダイオード)に到達する2つの信号間の時間遅延はΔt≒2Pνα′n(ωL)2/c2であり、Pは光14が従う経路の周長である。この構造は、移動している液体における光の速度を判定するためにフィゾーによって使用されたものであり(H. Fizeau, Comp. Rend., Vol. 33, 349 (1851))、この結果は周知である(たとえば、W.R. Leeb, G. SchiffnerおよびE. Scheiterer, “Optical fiber gyroscopes: Sagnac or Fizeau effct,”Appl. Opt., Vol. 18, No. 9, 1293-1295 (1979);E. J. Post,“Sagnac Effect,”Rev. Mod. Phys., Vol. 39, 475 (1967)参照、全体を引用により本明細書に援用する)。移動している流体12の光屈折率がわかれば、この構造を流体の流れの速度センサとして使用することができる。なお、時間遅延はα′に依存し、大きな値の群屈折率ngについては、式(2)で表わされる位相屈折率に対する群屈折率の比率であるng/nに比例する。その結果、図1の構造を有する干渉流体速度センサの感度はΔtに比例し、その中を進行する光の速度の逆数に比例する。したがって、低速光を利用する干渉流体速度センサ10については、光が減速するにつれて、閉鎖された経路を流れる流体の速度に対する感度が高くなる。
【0020】
図2は、干渉接線速度センサ30を概略的に示し、固定された実験室基準系に関してある角周波数Ωで回転する半径Rおよび屈折率nのディスク32を有し、逆の構造で使用されるサニャック干渉計に挿入される。限定はしないが、マッハツェンダー干渉計およびマイケルソン干渉計を含む他の種類の干渉計について同じ解析を行なうことができる。なお、図2によって概略的に示される干渉接線速度センサ30の物理的現象は、図1によって概略的に示される干渉流体速度センサのものと全く同じであり、この構造はフィゾーによっても予測された。
【0021】
この回転または接線速度センサ30において、ディスク32上の点Aおよび点Bの間の距離はLであり、光14の経路はディスク32の接線速度に平行であると想定される(ただし回転感度の必要条件ではなく、代数をわずかに簡略化させるに過ぎない)。結果として生じる時間遅延は、Pの代わりにLを代入し、RΩをνに代入すると、図1に関して述べた干渉流体速度センサ10と同じである。干渉流体速度センサ10の場合のように、接線速度センサ30の感度は低速光の使用によって向上される。特に光源Sと点Aとの間、および検出器Dと点Bとの間を進行する光の部分を置換するために、このようなセンサをすべての自由空間成分で作成することができる、または光ファイバを組込むことができる。図2の概略構造を有するマッハツェンダー型サニャック干渉計が提案されており、解析されている(M.S. Shahriar, G.S. Pati, R. Tripathi, V. Gopal, M. Messall, およびK. Salit,“Ultrahigh enhancement in absolute and relative rotation sensing using fast and slow light,”Phys. Rev. A, Vol. 75, 053807 (2007)参照)。
【0022】
図3は、本明細書に記載される一部の実施例に係る例示的な光センサ40を概略的に示す。光センサ40は、低速光を利用して物質(たとえば光導波路42)の線速度を測定する。光センサ40は、少なくとも1つの光結合器46と、当該少なくとも1つの光結合器46に光学的に連通する光導波路42とを含む。光導波路42は、当該少なくとも1つの光結合器46から第1の光信号を受取るように構成される。第1の光信号は、光導波路42の少なくとも一部分を伝播する間、ある群速度およびある位相速度を有する。群速度は位相速度未満である。第1の光信号と第2の光信号との間の干渉は、光センサ40の少なくとも一部分への摂動によって影響される。
【0023】
図3によって概略的に示されるように、当該少なくとも1つの光結合器46はビームスプリッタを含むことができる。また、当該少なくとも1つの光結合器46は複数のミラー18を含むことができる。一部の実施例において、光導波路42の一部分は、ブラッグファイバ、フォトニックバンドギャップファイバ、または逆の構造で動作するサニャック干渉計に挿入された多層膜積層物を含む。一部の実施例において、群速度は真空中の光の速度の20%未満であるが、他の一部の実施例においては、群速度は真空中の光の速度の10%未満である。一部の実施例において、光導波路42の一部分は固体であるが、他の一部の実施例においては、光導波路42の一部分は流体を含む(たとえばコア内に気体または液体を有する中空光ファイバ)。一部の実施例において、光導波路42の一部分は均質であるが、他の一部の実施例においては、光導波路42の一部分は不均質である。一部の実施例においては、光導波路42の一部分は1より大きい屈折率を有する。
【0024】
一部の実施例において、光センサ40の少なくとも一部分への摂動は、光センサ40の他の部分(たとえば少なくとも1つの光結合器46)に関する光導波路42の移動を含む。このような一部の実施例において、図3に概略的に示されるように、移動は光導波路42の並進を含み、干渉は光導波路42の速度を示す。
【0025】
一部の実施例において、光導波路42は、少なくとも1つの光結合器46から第1の光信号および第2の光信号を受取るように構成される。一部の実施例の光導波路42は、第1の光信号が第1の方向に光導波路42を伝播しかつ第2の光信号が第1の方向とおおむね反対の第2の方向に光導波路42を伝播する間、第1の方向に沿って移動するように構成される。
【0026】
図3の光センサ40は、上述の図1および図2の2つのセンサとは異なる。なぜなら、図3の光センサ40において移動している光導波路42の端点は、実験室基準系においては静止していないからである。光導波路42の少なくとも一部分は屈折率nおよび長さLを有し、速度νで移動している。センサ40を逆に伝播する2つの信号間の時間遅延を算出するためには、ドップラー偏移成分を考慮に入れなければならない。この時間遅延を慎重に解析すると、Δt≒2Ln(ωL)ν[n(ωL)(1−α′)−1]/c2が得られる。限界ng>>n(低速光)において、この時間遅延はng/nの比率に比例し、これは、この光センサ40の感度も低速光の使用によって向上されることを示す。図2について上述した接線速度センサ30とは異なり、図3によって概略的に示される光センサ40の物理的現象は、図1の構造と同等ではない。
【0027】
一部の実施例において、図3によって概略的に示される光センサ40は、光導波路42の線速度を検知する。第1の光路に沿って(たとえば図3の干渉計10を右回りに)進行する第1の光信号は、光導波路42の線速度におおむね平行な方向に光導波路42を伝播し、第2の光路に沿って(たとえば図3の干渉計10を左回りに)進行する第2の光信号は、光導波路42の線速度とおおむね反対の方向に光導波路42を伝播する。光導波路42の線形移動は、検出器Dによって検出される第1の光信号と第2の光信号との間の干渉を修正する。一部の実施例において、光センサ40は、群速度に依存する(たとえば群速度に逆比例する)光導波路42の速度に対する感度を有する。一部の実施例において、光センサ40は、速度が測定されるいずれのシステムでも使用することができ、一部の実施例においては、光センサ40は超小型電気機械システム(MEMS)構造で形成することができる。
【0028】
上述の光速度センサの知識を用いて、従来の光ファイバジャイロスコープ(FOG)50の感度を解析することができる。最も簡単な形態では、図4によって概略的に示されるように、FOG50は(たとえば複数のループを有する)ファイバコイル52、光源S、検出器D、および少なくとも1つの光結合器54を含む。一部の構造において、当該少なくとも1つの光結合器54は、光源Sからの光信号をコイル52に結合するための第1のビームスプリッタまたはファイバ結合器と、コイル52から戻る光信号を検出器Dに入力するための第2のビームスプリッタまたはファイバ結合器とを含む。光源Sは、逆回転する2つの信号をコイル52に送り、コイル52を回って進行した後、検出器Dにおいて再結合される。図4によって概略的に示されるFOG50において、破線で囲まれた箱の中のすべてがコイル52の主対称軸を中心に同じ速度Ωで回転することができ、その他のすべては、固定された実験室基準系に関して静止している。破線で囲まれた箱の中のすべてが回転すると、逆回転する2つの信号は、非可逆性のサニャック効果によって異なる位相偏移を蓄積し、検出器Dにおいて2つの光信号間の干渉を招く。干渉は検出される出力に影響を及ぼし、Ωを示す(たとえば依存する)。
【0029】
少なくとも一人が逆のことを主張している(U. LeonhardtおよびP. Piwnicki,“Ultrahigh sensitivity of slow-light gyroscope,”Phys. Rev. A, Vol. 62, 055801 (2000))にもかかわらず、この従来のFOG50の感度は、FOG50が構成されるファイバのモードの位相屈折率nおよび群屈折率ngの両方に依存しないことが第1原理から明確に証明されている(たとえば、H.J. ArdittyおよびH.C. Lefevre,“Sagnac effect in fiber gyroscopes,”Opt. Lett., Vol. 6, No. 8, 401 (1981)参照、全体を引用により本明細書に援用する)。この非依存性についての物理的な根拠は、上記の式で証明することができるが、コイル52を伝播する光の位相屈折率が変化する(たとえば上昇する)と2つの反対の効果が生じるという点である。一方の効果は、位相屈折率に比例して位相が増大する点である。この効果の結果として、位相屈折率の上昇が、逆に伝播する2つの波の間の回転による微分位相変化の増大に繋がる。他方の効果は、回転方向に進行する光がフレネルフィゾー抗力効果によって引きずられて若干速く進行するが、回転の方向と逆に進行する光は反対の符号によって引きずられ、したがって若干遅く進行するという点である。この効果の結果として、逆に伝播する2つの波の間の回転による微分位相変化が減少する。上掲のH.J. ArdittyおよびH.C. Lefevreは、反対の符号のこれら2つの効果が全く同じ大きさを有し、したがって互いにちょうど打消し合うことを数学的に示している。したがって、図4によって概略的に示される従来のFOG50について、回転感度は位相屈折率に依存しない。ゆえに、その導関数(たとえば群屈折率)および群速度にも依存しない。しかし、以下により詳細に述べるように、群屈折率または群速度が明示的に数式に存在する構造において、光センサは、群屈折率または群速度に依存する感度を呈することができる。
【0030】
図4のFOG50はFOG50の絶対回転の影響を受けやすく、(たとえば航空機における)慣性航法のための商業用途において使用される。以下の例について説明するように、一部の実施例において、図4のものとは若干異なるジャイロスコープ構造が考慮される。これらの他の構造においては、典型的に装置全体が回転する従来のFOG50とは異なり、FOGの異なる部分が互いに対して回転する。これらの他の構造において、FOGは相対的な回転(たとえば装置のある部分の別の部分に関する回転)に対する感度を有する。このような一部の実施例は、(少なくとも1本の回転軸を中心に完全に回転するようにFOGが慣行的に要求される航空機または自動車の慣性航法とは異なり)FOGの一部分に極めて小さい回転のみが加えられる用途について有利に使用される。
【0031】
従来のFOG50の感度は低速光によって変化しないが、上述の光速度センサ40の感度は、群速度νgまたは群屈折率ngに比例させることができる。一部の実施例において、二波干渉計は、物質の基準系において測定されたときに2つの波の周波数が異なる場合、低速光によって影響される感度を有する。換言すると、本明細書に記載される一部の実施例の光センサは、光センサに加えられた摂動に応答して変化する1つ以上の光路長を有する。1つ以上の光路長を変化させる光センサの2つの部分間の相対的な移動を有することによって、本明細書に記載される一部の実施例は、2つの光信号間における周波数のドップラー偏移を呈する。低速光によって向上される感度を有する構造と有さない構造との違いは、次の構造によって示される。低速光によって向上される感度についてのこの同じ基本原則から、さらに多くの実施例を設計することも可能である。
【0032】
図5は、コイル62と少なくとも1つの光結合器64とを有するFOG60を概略的に示す。図5のFOG60について、光源Sおよび検出器Dは慣性基準系に固定され、FOG60の残りは速度Ωで回転する。回転が生じる際、当該少なくとも1つの光結合器64と、光源Sおよび検出器Dとの間の経路長は変化しない(たとえば、光導波路が偏向されるにすぎない)。FOG60は、図4に示される従来のFOG50と全く同様に挙動する。図5の構造にはドップラー偏移は存在せず、当該少なくとも1つの光結合器64がFOG60の有効な光源として機能する。このFOG60は、低速光の恩恵を受ける感度は有していない。
【0033】
図6は、コイル72と少なくとも1つの光結合器74とを有するFOG70を概略的に示す。図6のFOG70について、当該少なくとも1つの光結合器74が点線で囲まれた箱の外に移動される。これは、当該少なくとも1つの光結合器74が光源Sおよび検出器Dと同様に静止していることを示す。回転が生じる際、当該少なくとも1つの光結合器74とコイル72との間の経路長は変化しない(たとえば、光導波路が偏向されるにすぎない)。FOG70も、図4および図5の2つのFOG50およびFOG60と同じように挙動する。当該少なくとも1つの光結合器74から出射する光は点Aまたは点Bのいずれかにおいて測定されるのと同じ周波数を有する。これはこのFOG70が、当該少なくとも1つの光結合器74がループ72と同速回転しているかのように挙動することを意味する。FOG70の感度は群速度および群屈折率に依存せず、低速光の使用の恩恵を受けない。
【0034】
図7Aは、本明細書に記載される一部の実施例に係る例示的なFOG80を概略的に示す。FOG80は、光導波路82(たとえば複数のループを含むファイバコイル)と少なくとも1つの光結合器84(たとえば3dBのファイバ結合器)とを含む。光導波路82は、当該少なくとも1つの光結合器84と光学的に連通している。光導波路82は、当該少なくとも1つの光結合器84から第1の光信号を受取るように構成される。第1の光信号は、光導波路82の少なくとも一部分を伝播する間、ある群速度およびある位相速度を有し、群速度は位相速度未満である。第1の光信号と第2の光信号との間の干渉は、FOG80の少なくとも一部分への摂動によって影響される。
【0035】
一部の実施例において、光導波路82は、互いにおおむね平行な複数のループ(たとえば100個以上のループ)を有するコイル状構造である。光導波路82の少なくとも一部分は低速光伝播を支持し(たとえば、光導波路82の少なくとも一部分はブラッグファイバまたはフォトニックバンドギャップファイバを含み)、一部の実施例において、光導波路82はその全長に沿って低速光伝播を支持する。
【0036】
図7Aに概略的に示されるように、一部の実施例において、FOG80は光源Sおよび検出器Dをさらに含む。光源S、検出器Dおよび一部の実施例の少なくとも1つの光結合器84は静止しており、光導波路82は、光源S、検出器Dおよび当該少なくとも1つの光結合器84に関して移動するように構成される。このような一部の実施例において、摂動は、FOG80の別の部分(たとえば、光源S、検出器Dおよび当該少なくとも1つの光結合器84)に関する光導波路82の回転を含む。このような一部の実施例において、回転は、コイル状の光導波路82の対称軸を中心とする。
【0037】
一部の実施例において、当該少なくとも1つの光結合器84は、当該少なくとも1つの光結合器84と光導波路82とが互いに関して移動することができるように、光導波路82から機械的に分断される。たとえば、一部の実施例において、光導波路82は、図7によって概略的に示されるように、第1の方向に沿って移動する(たとえばコイル状の光導波路82の対称軸を中心に右回りに回転される)ように構成される。この光導波路82の回転中に、当該少なくとも1つの光結合器84からの第1の光信号は、光導波路82を第1の方向に(たとえばコイル状の光導波路82を右回りに)伝播し、当該少なくとも1つの光結合器84からの第2の光信号は、光導波路82を第1の方向とおおむね反対の第2の方向に(たとえばコイル状の光導波路82を左回りに)伝播する。
【0038】
一部の実施例において、図7Aによって概略的に示されるように、少なくとも1つの光結合器84は第1のポート85および第2のポート86を含み、コイル状の光導波路82は第1の端部87および第2の端部88を含む。第1のポート85は第1の端部87に光学的に結合され、第2のポート86は第2の端部88に光学的に結合される。このような一部の実施例において、FOG80は、第1のポート85と第1の端部87との間を進行する光信号が自由空間を伝播するように、第1のポート85と第1の端部87との間に第1の間隙を含む。このような一部の実施例のFOG80は、第2のポート86と第2の端部88との間を進行する光信号が自由空間を伝播するように、第2のポート86と第2の端部88との間に第2の間隙を含む。他の一部の実施例において、FOG80は、長手方向に伸縮可能な第1の光導波路(たとえば、ポリマー材料を含む導波路)を第1のポート85と第1の端部87との間に含み、長手方向に伸縮可能な第2の光導波路を第2のポート86と第2の端部88との間に含む。
【0039】
第1のポート85と第1の端部87との間の領域および第2のポート86と第2の端部88との間の領域の光路長を変化させると、FOG80の感度に著しく影響を及ぼす。このような一部の実施例において、当該システムは、図3に概略的に示される干渉速度センサ40に類似する。Lがコイル状の光導波路82の長さを表わし、ν=RΩが光導波路82の速度を表わすとすると、FOG80について逆に伝播する信号間の時間遅延は干渉速度センサ40についてと同じであり、たとえばΔt≒2Ln(ωL)ν[n(ωL)(1−α′)−1]/c2である。したがって、FOG80は低速光によって有利に向上される感度を有する光センサである。一部の実施例において、FOG80は、群速度または群屈折率に依存するコイル状の光導波路82の回転に対する感度を有する。
【0040】
一部の実施例において、FOG80は、加えられる回転が有限の偏位を有する用途において実用回転センサとして使用して、たとえば海上プラットフォームまたは建物などの大きな構造の屈曲を検出する、またはバルク光干渉計のミラーなどの機械部品の移動を検出することができる。コイル状の光導波路82が回転するにつれて、少なくとも1つの光結合器84の第1のポート85とコイル状の光導波路82の第1の端部87との間の第1の光路長が変化し、少なくとも1つの光結合器84の第2のポート86とコイル状の光導波路82の第2の端部88との間の第2の光路長が変化する。FOG80は、第1の光路長、第2の光路長、または第1の光路長および第2の光路長の両方の変化に応答する。
【0041】
図7Bは、第1のファイバ結合器84aと第2のファイバ結合器84bとを含む少なくとも1つの光結合器を利用した、図7AのFOG80の逆の構造を概略的に示す。図7Cは、第1のファイバ結合器84aと、ポートp1、p2およびp3を有する3ポートサーキュレータ84cとを含む少なくとも1つの光結合器84を利用した、図7AのFOG80の別の逆の構造を概略的に示す。光結合器の他の構造は、本明細書に記載されるさまざまな実施例にも対応する。
【0042】
図8Aは、本明細書に記載される一部の実施例に係る別の例示的なFOG90を概略的に示す。図8AのFOG90は、(たとえば、少なくとも一部分がブラッグファイバまたはフォトニックバンドギャップファイバを含む)コイル状の光導波路92と、光導波路92にエバネッセント結合された少なくとも1つの光結合器94(たとえばプリズム結合器)とを含み、光導波路92は、当該少なくとも1つの光結合器94に関して回転する。FOG90は、流れる流体12を回転する光導波路92で置換し、かつ固定ビームスプリッタ16を当該少なくとも1つの光結合器94(たとえばプリズム結合器)で置換すれば、図1に示される光センサ10と類似している。上述のように、干渉流体速度センサ10は流体の群屈折率に依存する感度を有し、低速光の使用によって感度の向上がもたらされる。図8AのFOG90は、光導波路92における光の群屈折率または群速度に依存する感度を有し、低速光の使用によって感度の向上がもたらされる。
【0043】
図8Bは、少なくとも1つの光結合器94が第1の結合器94aおよび第2の結合器94bを含む逆の構造のFOG90を概略的に示す。このような一部の実施例において、サニャックループから戻る光は逆の出力ポートにおいて収集される。光はこのポートからループに入射する。(たとえば、H. Lefevre, The Fiber-Optic Gyroscope, Artech House, Boston, Ch. 3, 1993参照、全体を引用により本明細書に援用する)。これは、図8Bに概略的に示されるように、結合器(たとえばファイバ結合器)を光入力ポートに配置しかつ結合器の第4のポートにおいて反射光を収集することによって、直接的に行なうことができる。他の一部の実施例においては、本明細書に記載される光センサに対して、逆の動作を行うように同様の変更を加えることができ、光センサの安定性を改善することに繋がる。図8Cは、第1のファイバ結合器94aと、ポートp1、p2およびp3を有する3ポートサーキュレータ94cとを含む少なくとも1つの光結合器94を利用した、図8AのFOG90の別の逆の構造を概略的に示す。光結合器の他の構造は、本明細書に記載されるさまざまな実施例にも対応する。
【0044】
図8Aから図8CのFOG90は、図7Aから図7CのFOG80と同種の用途を有することができる。一部の実施例において、少なくとも1つの光結合器94は、当該少なくとも1つの光結合器94と光導波路92とが互いに関して移動するように、光導波路92に対しておおむね垂直な軸を中心に回転する。FOG90は、当該少なくとも1つの光結合器94と光導波路92との間の相対的な回転に応答する。
【0045】
低速光の使用によって向上させることができる他の種類のセンサは、ファイバ歪みセンサおよび温度センサである。下記のように、長手方向の歪みの変化および温度の変化に対する、(単純で均質な円柱状ロッドとしてモデリングされる)理想化されたファイバの位相感度が同時に考慮される。これらの算出において、ファイバの断面はその長さに沿って均一であり、低速光はファイバの横方向の構造に起因する(たとえば、C. Lin, W. Zhang, Y. HuangおよびJ. Peng,“Zero dispersion slow light with low leakage loss in defect Bragg fiber,”Appl. Phys. Lett., Vol. 90, 031109 (2007)参照、全体を引用により本明細書に援用する)。温度および歪みの両方は、3つの方法でファイバに影響を及ぼす。すなわち、長手方向の寸法を変化させ、横方向の寸法を変化させ、かつ屈折率を変化させる。これらの変化は、より詳細に以下に説明される。
【0046】
光導波路(たとえばファイバ)の長さが(たとえば温度変化または歪みを加えることによって)L0からL0+ΔLに変更された場合、導波路を伝播する波長λの信号の位相における変化は、ΔΦL=2πneffΔL/λによって表わすことができる。長さの変化が温度変化ΔTによって誘起される場合、ΔLは導波路の熱膨張によってΔL=αL0ΔTとして表わすことができる。αは導波路の熱膨張係数である。長さの変化が長手方向の歪みεによって誘起される場合、長さの変化は、ΔL=εL0によって表わすことができる。これらの効果はいずれも群屈折率または群速度に依存せず、したがって、光センサは導波路の長さの変化に応答することができるが、このような変化に対する光センサの感度は低速光の使用によって向上されない。
【0047】
導波路モードが有効屈折率n(λ)を有するものとする。導波路の横方向の寸法が係数(1+δ)によって(たとえば歪みまたは温度変化のいずれかによって生じるように)均一に変倍されると、モードの有効屈折率も変倍され、neff(λ(1+δ))となる。つまり、変倍された導波路のモードは、当初の導波路が波長λにおいて有していたのと同じ有効屈折率を波長(1+δ)λにおいて有する。これは、信号周波数が一定であったとしても、信号の有効(正規化)周波数は導波路の横方向寸法の変化に起因して変化するということを意味する。このため、群屈折率が有効屈折率に出現し、すなわちΔneff=(ng−neff)δであり、ゆえに、
【0048】
【数2】
【0049】
となる。横方向の寸法が温度変化によって変化する場合は、δ=αΔTである。横方向寸法の変化が長手方向の歪みεによって誘起される場合は、δ=−ενである。νは導波路のポアソン比である。したがって、一部の実施例において、歪みおよび温度変化のいずれかに対する導波路の感度は、導波路を伝播する光の群屈折率または群速度に依存し、低速光を使用することによって、より高感度の温度または歪みファイバセンサを有利に実現することができる。
【0050】
図9は、本明細書に記載される一部の実施例に係るマッハツェンダー構造を有する例示的な光センサ100を概略的に示す。光センサ100は、少なくとも1つの光結合器(たとえば第1の光結合器102および第2の光結合器104)と、当該少なくとも1つの光結合器に光学的に連通する(たとえば光センサ100の検知アーム108の)光導波路106とを含む。光導波路106は、当該少なくとも1つの光結合器から第1の光信号(たとえば光源Sから第1の光結合器102によって受取られた光信号の第1の部分)を受取るように構成される。第1の光信号は、光導波路106の少なくとも一部分を伝播する間、ある群速度およびある位相速度を有し、群速度は位相速度未満である。第1の光信号と第2の光信号との間の干渉は、光導波路106に加えられる摂動(たとえば長手方向の歪みの変化、温度の変化)によって影響される。
【0051】
一部の実施例において、図9によって概略的に示されるように、第2の光信号は、光源Sから第1の光結合器102によって受取られた光信号の第2の部分を含む。第2の光信号は、光センサ100の基準アーム112の(たとえば位相速度と等しい群速度を有する)従来の光導波路110を伝播する。第1の光信号および第2の光信号は第2の光結合器104によって受取られ、第1の光信号と第2の光信号との間の干渉が検出器Dによって検出される。一部の実施例において、摂動に対する光センサ100の感度は、群速度に逆比例する。
【0052】
(弾性光学効果による)歪みまたは(熱光学効果による)温度変化のいずれかを加えることで、導波路の屈折率を変化させることができる。物質の屈折率の変化Δnについては、有効モード屈折率neffの変化はΔneff=(ng/neff)σΔnである(たとえば、M. Soljacic, S.G. Johnson, S. Fan, M. Ibansecu, E. Ippen, およびJ.D. Joannopoulos,“Photonic-crystal slow-light enhancement of nonlinear phase sensitivity,”J. Opt. Soc. Am. B, Vol. 19, No. 9, 2052-2059 (2002)参照、全体を引用により本明細書に援用する)。σは、屈折率が変更される物質を伝わるモード出力の分数(fraction)を示す。これは、位相変化ΔΦT=2π(L/λ)(ng/neff)σΔnに繋がる。熱光学効果についてはΔn=γΔTであり、γは熱光学係数である。
【0053】
しかし実際の光ファイバにおける全体像は、この単純な解析よりもはるかに複雑である。光ファイバは一般にいくつかの物質で構成されており、各々が異なる機械特性および熱特性を有する。たとえば、従来の単一モードファイバにおいて、コア、クラッディングおよびジャケットはすべて異なる機械特性および熱特性を有する。同様に、フォトニックバンドギャップファイバにおいて、コア、格子、シリカクラッディング、およびアクリル酸塩ジャケットは異なる特性を有する。ブラッグファイバにも同じことが当てはまり、異なる特性の物質からなる。したがって、実際のファイバの温度を変化させると、異なる物質が異なって膨張し、ファイバにおいて非均一的な熱誘起された歪みを招く。このような一部の実施例において、これらの歪みは、弾性光学効果によってさまざまな物質の屈折率に摂動を生じさせ、ひいてはファイバの有効屈折率を変化させる。空心フォトニックバンドギャップファイバ(PBF)におけるこれらの効果の広範な解析は、たとえば、V. Dangui, H.K. Kim, M.J.F. Digonnet, およびG.S. Kino,“Phase sensitivity to temperature of the fundamental mode in air-guiding photonic-bandgap fibers,”Opt. Express, Vol. 13, No. 18, 6669-6684 (2005)によってもたらされ、全体を引用により本明細書に援用する。実際のファイバは本明細書に記載される簡略化された1次モデルよりも複雑であり、何らかの相違が予期されるものの、これらの算出の結果は実際の光センサシステムの全般的な特性を予測するのに有益である。
【0054】
たとえば、空心のブラッグファイバを含む光導波路について(たとえば、V. Dangui, H.K. Kim, M.J.F. Digonnet, およびG.S. Kino,“Phase sensitivity to temperature of the fundamental mode in air-guiding photonic-bandgap fibers,”Opt. Express, Vol. 13, No. 18, 6669-6684 (2005)によって述べられているように)、歪みの縦方向成分は(同じクラッディング厚さおよび物質を有する)従来のファイバよりも若干大きい。歪みの横方向成分は、ファイバ断面のより複雑かつ異質な性質に起因して、より複雑な温度の関数である。上述のように、この歪みの横方向成分は、その複雑さから本明細書に記載されるモデリングには含まれなかった。しかし、上掲のDangui他によって空心フォトニックバンドギャップファイバ(PBF)について算出されたものであり、若干弱い。空心ブラッグファイバの場合には、若干の減少に向けて同様の傾向が予期される。また、空心ブラッグファイバにおいては、空気の熱光学係数が固体よりもはるかに小さいことから、熱光学項目ははるかに小さい。この結果は光の群速度には依存しない。この項目は空気においては非常に弱いため、空心PBFにおける温度による全位相変化の多くの部分が従来のファイバよりも理論的かつ実験的に著しく小さいと示されている(上掲のDangui他参照)。たとえば、Dangui他によって研究された特定のPBF(デンマーク国、Crystal Fibre社から購入)においては、温度に対する位相の温度依存度の低下は約7分の1である。この空心PBFと類似しているため、同様の傾向が空心ブラッグファイバについて予期される。したがって、空心ブラッグファイバを使用して光センサにおいて低速光を生成し感度を向上させる別の利点は、モードが主に空気中において誘導されることから、温度感度が低下する(たとえば3分の1以上)点である。
【0055】
上述のように、一部の実施例では、歪みを加えるとファイバの屈折率に変化が生じ、ファイバの有効モード屈折率が変化する。熱によって誘起される歪みの場合のように、異なる機械特性を有するいくつかの物質で構成される実際のファイバにおける歪み形状の算出は複雑である。この解析をいくらか簡略化するために、従来の単一モード中実ファイバにおける歪みの効果を考慮することができる(たとえば、G.B. Hocker,“Fiber-optic sensing of pressure and temperature,”Appl. Opt., Vol. 18, No. 19, 1445 (1979)参照、全体を引用により本明細書に援用する)。現在のところ、従来のファイバにおいて低速光を誘起するための既知の方法はないものの、この解析は一般的な傾向を導出するために参考になる。
【0056】
従来の単一モードファイバにおける歪みによって誘起される屈折率変化はΔn=−n3[ε(1−μ)p12−μεp11]/2であり、p11およびp12は歪み光テンソルの成分である。シリカについては、p11=0.121かつp12=0.27である。上記から公式Δneff=(ng/neff)σΔnを用いると、中実ファイバにおける有効屈折率の変化をさまざまな値のneffおよびngについて算出することができる。
【0057】
ファイバの歪みおよび熱位相感度がどのように群屈折率に依存するかについての数値例を得るために、平均屈折率n=1.45である中実ファイバの場合を考える。ファイバのすべての部分の機械特性が同じである(たとえばジャケットがない)と想定することによって熱膨張の解析が簡略化され、歪みによって誘起される屈折率変化が上記の数式によって与えられる。ファイバの熱特性または機械特性を変化させることなく群屈折率を自由に変化させることができる(ngは自由変数として扱われる)とも想定される。簡略化のために、ファイバの中実物質内を伝えられる出力のすべてに対応してσ=1と想定される。
【0058】
図10は、このファイバの温度を変化させることによる正規化された位相変化をグラフ化したものである。実線は熱光学効果によって引起される位相変化であり、破線はファイバの横方向膨張に起因する位相変化であり、点線はファイバの縦方向膨張による位相変化である。上記の導関数によれば、ngが大きいとき、熱光学位相遅延および横方向膨張位相遅延の両方が向上を呈する。
【0059】
図11は、図10について使用したのと同じファイバに加えられた歪みを変化させることによる正規化された位相変化をグラフ化したものである。実線の曲線は熱光学効果によって引起される位相変化であり、破線の曲線はファイバの横方向寸法の変化に起因し、点線の曲線はファイバの縦方向膨張による位相変化である。さまざまな効果を対数の対数スケールで比較するために、すべてが同じ符号を有するとは限らないが、各相変化の絶対値がグラフ化されている。図10にグラフ化された熱位相感度について示したように、屈折率および横方向寸法の変化に起因する図11にグラフ化された項目も、ngが大きいときは、ngが増大するにつれて向上を呈する。
【0060】
図12は、群屈折率が変動される際の中実ファイバの歪み感度と熱感度とを比較するグラフである。歪み応答(実線)および温度応答(破線)は両方とも、群屈折率が上昇するにつれて感度が上昇することを示す。図13は、歪みと温度とに対する位相感度の比率のグラフである。図13に示すように、熱感度に対する歪みの比率は約10〜11の間のngについて最小化され、ngがこの範囲よりも大きくなるにつれて(より低速な光)2つの感度の比率は一定となる。これは、ngに比例する項目が優勢であるためである。この算出は、理想化された均質な中実ファイバについて行なわれたが、光センサの歪み感度の低速光向上が光センサの温度感度の低速光向上に比べて低下する範囲の値の群屈折率の全体的な現象を示すものである。一部の実施例において、群屈折率は、温度感度に対して所定の比率の歪み感度をもたらすように選択される。
【0061】
たとえば、図12および図13に示すように、中実ファイバ(σ=1)を有する歪みセンサについては、どの値のngによっても歪み感度は熱感度を超えて大幅に上昇されない。したがって、一部の実施例において、中実ファイバを有する歪みセンサは、低い群屈折率を有利に有する。しかし、温度センサについては逆が当てはまる。すなわち、10〜11の間のngについて熱感度が歪み感度と比較して最大となる。この範囲の群屈折率においては、歪みに対する熱センサの感度が有利に低下する。したがって、一部の実施例において、中実ファイバを有する温度センサは、10〜11の間の群屈折率を有利に有する。空心ブラッグファイバを含む空心ファイバは、温度感度に対して所定の比率の歪み感度をもたらすように群屈折率を選択できるように、同様の挙動を呈するものと予期される(ただし実際の群屈折率値は、中実ファイバについて上述したものとは異なることになる)。
【0062】
低速光によって向上される(特定の測定量に対する)感度を有すると本明細書で特定されたファイバセンサのうち、すべてではないにせよ少なくとも一部は、低速光によって向上される温度に対する感度も有する。この特徴は、光センサを特定の測定量に適合させるために光センサの設計および製造において考慮することができる。一部の実施例において、第1の測定量(たとえば歪み)の変化に対する第1の感度と第2の測定量(たとえば温度)の変化に対する第2の感度とを有する光センサが製造される。当該方法は、光がある群速度およびある位相速度で伝播するように構成された光導波路を提供するステップを含み、群速度は位相速度未満である。第1の感度の第1の向上および第2の感度の第2の向上は両方とも、光導波路の群屈折率に依存する。当該方法はさらに、第1の向上が第2の向上を上回るように群屈折率を選択するステップを含む。
【0063】
一部の実施例において、温度とは異なる測定量に対する感度を向上させるのに低速光を用いる光センサは、多くの既存の技術のうちの1つ(たとえば、光センサ、特に低速光が伝播する光導波路の安定した温度を維持すること)もしくは開発される技術を用いて、温度感度の上昇効果を有利に補正するかまたは他の方法で低減させる。たとえば、群屈折率が約10〜11よりも大きい中実ファイバを用いた歪みファイバセンサの一部の実施例においては、温度に対する感度と同じように、光の減速とともに歪みに対する感度が低下する。温度に対するこの依存度は有益ではないが、利用可能な技術を用いることによってその効果を補正するかまたは他の方法で低減することができ、歪みに対する感度の上昇は極めて有益となり得る。
【0064】
逆に、他の一部の実施例においては、低速光ファイバを有する非常に高感度の温度センサを有益に作製することができる。たとえば、一部の実施例の光センサは、約10〜11の間の群屈折率を有する中実ファイバを使用し、それによって温度に対する感度を上昇させ、歪み感度は相対的に低下する。このような一部の実施例においては、歪みの効果を制御することが望ましい。これは、多くの既存の技術のうちの1つ(たとえば、誘起される歪みの変化が低減されるように、光センサ、特に光センサの低速光が伝播する部を、熱膨張係数が小さい物質上に搭載すること)を使用することによっても、または開発される技術によっても、歪みに対する感度が向上されることになるためである。
【0065】
さまざまな実施例を上述した。本発明をこれらの特定の実施例に関して記載したが、当該記載は本発明を例示するためのものであり、限定するためのものではない。請求項によって規定される本発明の精神および範囲から逸脱することなく、当業者はさまざまな修正および用途に想到し得る。
【特許請求の範囲】
【請求項1】
光センサであって、
少なくとも1つの光結合器と、
複数のループを含む光導波路とを備え、前記光導波路は、前記少なくとも1つの光結合器に光学的に連通し、前記複数のループの対称軸を中心とする前記光導波路の回転によって前記少なくとも1つの光結合器と前記光導波路とが互いに関して移動することができるように、前記少なくとも1つの光結合器から機械的に分断され、前記光導波路は、前記少なくとも1つの光結合器から第1の光信号を受取るように構成され、前記第1の光信号は、前記光導波路の少なくとも一部分を伝播する間、ある群速度およびある位相速度を有し、前記群速度は前記位相速度未満であり、前記第1の光信号と第2の光信号との間の干渉は、前記対称軸を中心とする前記光導波路の前記回転によって影響され、さらに、
前記第1の光信号と前記第2の光信号との間の干渉を検出するように構成された光検出器を備える、光センサ。
【請求項2】
前記光導波路はブラッグファイバを含む、請求項1に記載の光センサ。
【請求項3】
前記光導波路はフォトニックバンドギャップファイバを含む、請求項1に記載の光センサ。
【請求項4】
前記群速度は、真空中の光の速度の50%未満である、請求項1に記載の光センサ。
【請求項5】
前記少なくとも1つの光結合器に光学的に連通する光源をさらに備える、請求項1に記載の光センサ。
【請求項6】
前記少なくとも1つの光結合器は光源から光を受取りかつ光を光検出器に伝えるように構成され、前記光導波路は前記複数のループを含むファイバコイルを含む、請求項1に記載の光センサ。
【請求項7】
前記複数のループの前記対称軸を中心とする前記光導波路の前記回転は、前記複数のループの第1の部分と前記少なくとも1つの光結合器との間の第1の光路長を増大させ、前記複数のループの第2の部分と前記少なくとも1つの光結合器との間の第2の光路長を減少させる、請求項1に記載の光センサ。
【請求項8】
前記少なくとも1つの光結合器はプリズム結合器を含む、請求項1に記載の光センサ。
【請求項9】
前記少なくとも1つの光結合器は第1のポートおよび第2のポートを含み、前記光導波路は第1の端部および第2の端部を含み、前記第1のポートは前記第1の端部に光学的に結合され、前記第2のポートは前記第2の端部に光学的に結合される、請求項1に記載の光センサ。
【請求項10】
前記第1のポートと前記第1の端部との間を進行する光信号が自由空間において伝播するように、前記第1のポートと前記第1の端部との間に第1の間隙をさらに備える、請求項9に記載の光センサ。
【請求項11】
前記第2のポートと前記第2の端部との間を進行する光信号が自由空間において伝播するように、前記第2のポートと前記第2の端部との間に第2の間隙をさらに備える、請求項10に記載の光センサ。
【請求項12】
前記第1のポートと前記第1の端部との間に、長手方向に伸縮可能な第1の光導波路をさらに備える、請求項9に記載の光センサ。
【請求項13】
前記第2のポートと前記第2の端部との間に、長手方向に伸縮可能な第2の光導波路をさらに備える、請求項12に記載の光センサ。
【請求項14】
前記回転は20度未満である、請求項1に記載の光センサ。
【請求項15】
回転を光学的に検知する方法であって、前記方法は、
少なくとも1つの光結合器を使用して光を受取るステップと、
複数のループを含む光導波路を介して前記少なくとも1つの光結合器によって受取られた光の第1の部分を含む第1の光信号を伝播し、同時に、前記光導波路を介して前記少なくとも1つの光結合器によって受取られた光の第2の部分を含む第2の光信号を伝播するステップとを含み、前記第1の光信号および前記第2の光信号は、前記光導波路の少なくとも一部分を伝播する間ある群速度およびある位相速度を有し、前記群速度は前記位相速度未満であり、さらに、
前記第1の光信号および前記第2の光信号が前記複数のループを伝播する間、前記複数のループのうち少なくとも1つと前記少なくとも1つの光結合器とを、前記複数のループの対称軸を中心として互いに関して回転させるステップと、
前記第1の光信号および前記第2の光信号が前記複数のループを伝播した後に前記第1の光信号と前記第2の光信号との間の干渉を検出するステップとを含む、方法。
【請求項16】
光センサであって、
少なくとも1つの光結合器と、
前記少なくとも1つの光結合器から第1の光信号および第2の光信号を受取るように構成された光導波路コイルとを備え、光はある群速度およびある位相速度で前記コイルの少なくとも一部分を伝播し、前記群速度は前記位相速度未満であり、前記コイルおよび前記少なくとも1つの光結合器の少なくとも一方は、前記第1の光信号が第1の方向に前記コイルを伝播し、前記第2の光信号が前記第1の方向と概ね反対の第2の方向に前記コイルを伝播する間、前記コイルの対称軸を中心として他方に関して回転するように構成され、前記第1の光信号と前記第2の光信号との間の干渉は、前記光センサの少なくとも一部分への摂動によって影響される、光センサ。
【請求項17】
前記群速度は、真空中の光の速度の50%未満である、請求項16に記載の光センサ。
【請求項18】
前記少なくとも1つの光結合器に光学的に連通する光源をさらに備える、請求項16に記載の光センサ。
【請求項19】
前記少なくとも1つの光結合器は、光源から光を受取りかつ光を光検出器に伝えるように構成され、前記コイルは複数のループを含む、請求項16に記載の光センサ。
【請求項20】
前記回転は、前記コイルの第1の部分と前記少なくとも1つの光結合器との間の第1の光路長を増大させ、前記コイルの第2の部分と前記少なくとも1つの光結合器との間の第2の光路長を減少させる、請求項16に記載の光センサ。
【請求項21】
前記少なくとも1つの光結合器はプリズム結合器を含む、請求項16に記載の光センサ。
【請求項22】
前記少なくとも1つの光結合器は第1のポートおよび第2のポートを含み、前記コイルは第1の端部および第2の端部を含み、前記第1のポートは前記第1の端部に光学的に結合され、前記第2のポートは前記第2の端部に光学的に結合される、請求項16に記載の光センサ。
【請求項23】
前記第1のポートと前記第1の端部との間を進行する光信号が自由空間において伝播するように、前記第1のポートと前記第1の端部との間に第1の間隙をさらに備える、請求項22に記載の光センサ。
【請求項24】
前記第2のポートと前記第2の端部との間を進行する光信号が自由空間において伝播するように、前記第2のポートと前記第2の端部との間に第2の間隙をさらに備える、請求項23に記載の光センサ。
【請求項25】
前記第1のポートと前記第1の端部との間に、長手方向に伸縮可能な第1の光導波路をさらに備える、請求項22に記載の光センサ。
【請求項26】
前記第2のポートと前記第2の端部との間に、長手方向に伸縮可能な第2の光導波路をさらに備える、請求項25に記載の光センサ。
【請求項27】
前記回転は20度未満である、請求項16に記載の光センサ。
【請求項1】
光センサであって、
少なくとも1つの光結合器と、
複数のループを含む光導波路とを備え、前記光導波路は、前記少なくとも1つの光結合器に光学的に連通し、前記複数のループの対称軸を中心とする前記光導波路の回転によって前記少なくとも1つの光結合器と前記光導波路とが互いに関して移動することができるように、前記少なくとも1つの光結合器から機械的に分断され、前記光導波路は、前記少なくとも1つの光結合器から第1の光信号を受取るように構成され、前記第1の光信号は、前記光導波路の少なくとも一部分を伝播する間、ある群速度およびある位相速度を有し、前記群速度は前記位相速度未満であり、前記第1の光信号と第2の光信号との間の干渉は、前記対称軸を中心とする前記光導波路の前記回転によって影響され、さらに、
前記第1の光信号と前記第2の光信号との間の干渉を検出するように構成された光検出器を備える、光センサ。
【請求項2】
前記光導波路はブラッグファイバを含む、請求項1に記載の光センサ。
【請求項3】
前記光導波路はフォトニックバンドギャップファイバを含む、請求項1に記載の光センサ。
【請求項4】
前記群速度は、真空中の光の速度の50%未満である、請求項1に記載の光センサ。
【請求項5】
前記少なくとも1つの光結合器に光学的に連通する光源をさらに備える、請求項1に記載の光センサ。
【請求項6】
前記少なくとも1つの光結合器は光源から光を受取りかつ光を光検出器に伝えるように構成され、前記光導波路は前記複数のループを含むファイバコイルを含む、請求項1に記載の光センサ。
【請求項7】
前記複数のループの前記対称軸を中心とする前記光導波路の前記回転は、前記複数のループの第1の部分と前記少なくとも1つの光結合器との間の第1の光路長を増大させ、前記複数のループの第2の部分と前記少なくとも1つの光結合器との間の第2の光路長を減少させる、請求項1に記載の光センサ。
【請求項8】
前記少なくとも1つの光結合器はプリズム結合器を含む、請求項1に記載の光センサ。
【請求項9】
前記少なくとも1つの光結合器は第1のポートおよび第2のポートを含み、前記光導波路は第1の端部および第2の端部を含み、前記第1のポートは前記第1の端部に光学的に結合され、前記第2のポートは前記第2の端部に光学的に結合される、請求項1に記載の光センサ。
【請求項10】
前記第1のポートと前記第1の端部との間を進行する光信号が自由空間において伝播するように、前記第1のポートと前記第1の端部との間に第1の間隙をさらに備える、請求項9に記載の光センサ。
【請求項11】
前記第2のポートと前記第2の端部との間を進行する光信号が自由空間において伝播するように、前記第2のポートと前記第2の端部との間に第2の間隙をさらに備える、請求項10に記載の光センサ。
【請求項12】
前記第1のポートと前記第1の端部との間に、長手方向に伸縮可能な第1の光導波路をさらに備える、請求項9に記載の光センサ。
【請求項13】
前記第2のポートと前記第2の端部との間に、長手方向に伸縮可能な第2の光導波路をさらに備える、請求項12に記載の光センサ。
【請求項14】
前記回転は20度未満である、請求項1に記載の光センサ。
【請求項15】
回転を光学的に検知する方法であって、前記方法は、
少なくとも1つの光結合器を使用して光を受取るステップと、
複数のループを含む光導波路を介して前記少なくとも1つの光結合器によって受取られた光の第1の部分を含む第1の光信号を伝播し、同時に、前記光導波路を介して前記少なくとも1つの光結合器によって受取られた光の第2の部分を含む第2の光信号を伝播するステップとを含み、前記第1の光信号および前記第2の光信号は、前記光導波路の少なくとも一部分を伝播する間ある群速度およびある位相速度を有し、前記群速度は前記位相速度未満であり、さらに、
前記第1の光信号および前記第2の光信号が前記複数のループを伝播する間、前記複数のループのうち少なくとも1つと前記少なくとも1つの光結合器とを、前記複数のループの対称軸を中心として互いに関して回転させるステップと、
前記第1の光信号および前記第2の光信号が前記複数のループを伝播した後に前記第1の光信号と前記第2の光信号との間の干渉を検出するステップとを含む、方法。
【請求項16】
光センサであって、
少なくとも1つの光結合器と、
前記少なくとも1つの光結合器から第1の光信号および第2の光信号を受取るように構成された光導波路コイルとを備え、光はある群速度およびある位相速度で前記コイルの少なくとも一部分を伝播し、前記群速度は前記位相速度未満であり、前記コイルおよび前記少なくとも1つの光結合器の少なくとも一方は、前記第1の光信号が第1の方向に前記コイルを伝播し、前記第2の光信号が前記第1の方向と概ね反対の第2の方向に前記コイルを伝播する間、前記コイルの対称軸を中心として他方に関して回転するように構成され、前記第1の光信号と前記第2の光信号との間の干渉は、前記光センサの少なくとも一部分への摂動によって影響される、光センサ。
【請求項17】
前記群速度は、真空中の光の速度の50%未満である、請求項16に記載の光センサ。
【請求項18】
前記少なくとも1つの光結合器に光学的に連通する光源をさらに備える、請求項16に記載の光センサ。
【請求項19】
前記少なくとも1つの光結合器は、光源から光を受取りかつ光を光検出器に伝えるように構成され、前記コイルは複数のループを含む、請求項16に記載の光センサ。
【請求項20】
前記回転は、前記コイルの第1の部分と前記少なくとも1つの光結合器との間の第1の光路長を増大させ、前記コイルの第2の部分と前記少なくとも1つの光結合器との間の第2の光路長を減少させる、請求項16に記載の光センサ。
【請求項21】
前記少なくとも1つの光結合器はプリズム結合器を含む、請求項16に記載の光センサ。
【請求項22】
前記少なくとも1つの光結合器は第1のポートおよび第2のポートを含み、前記コイルは第1の端部および第2の端部を含み、前記第1のポートは前記第1の端部に光学的に結合され、前記第2のポートは前記第2の端部に光学的に結合される、請求項16に記載の光センサ。
【請求項23】
前記第1のポートと前記第1の端部との間を進行する光信号が自由空間において伝播するように、前記第1のポートと前記第1の端部との間に第1の間隙をさらに備える、請求項22に記載の光センサ。
【請求項24】
前記第2のポートと前記第2の端部との間を進行する光信号が自由空間において伝播するように、前記第2のポートと前記第2の端部との間に第2の間隙をさらに備える、請求項23に記載の光センサ。
【請求項25】
前記第1のポートと前記第1の端部との間に、長手方向に伸縮可能な第1の光導波路をさらに備える、請求項22に記載の光センサ。
【請求項26】
前記第2のポートと前記第2の端部との間に、長手方向に伸縮可能な第2の光導波路をさらに備える、請求項25に記載の光センサ。
【請求項27】
前記回転は20度未満である、請求項16に記載の光センサ。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図8A】
【図8B】
【図8C】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図8A】
【図8B】
【図8C】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−37002(P2013−37002A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2012−187473(P2012−187473)
【出願日】平成24年8月28日(2012.8.28)
【分割の表示】特願2010−512400(P2010−512400)の分割
【原出願日】平成20年6月13日(2008.6.13)
【出願人】(503115205)ボード オブ トラスティーズ オブ ザ レランド スタンフォード ジュニア ユニバーシティ (69)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成24年8月28日(2012.8.28)
【分割の表示】特願2010−512400(P2010−512400)の分割
【原出願日】平成20年6月13日(2008.6.13)
【出願人】(503115205)ボード オブ トラスティーズ オブ ザ レランド スタンフォード ジュニア ユニバーシティ (69)
【Fターム(参考)】
[ Back to top ]