
光ディスク装置及びその制御方法
【課題】傷の状況に応じて光ディスクの回転速度の増減を制御し、傷による再生能力の低下を防止する。
【解決手段】光ディスクを回転させるモータ2と、光ディスクを再生し、RF信号、及び少なくともトラッキングエラー信号及びフォーカスエラー信号のいずれか一方のエラー信号を生成する再生部60と、光ディスクの傷の有無とその領域を、エラー信号の変動量を閾値判定することによって検出する傷検出部90と、モータを基準回転速度で回転させたときに変動量が所定の閾値を超える傷有りと判定された場合、変動量が所定の閾値以下となるようにモータの回転速度を変更するモータ制御部62と、を備える。
【解決手段】光ディスクを回転させるモータ2と、光ディスクを再生し、RF信号、及び少なくともトラッキングエラー信号及びフォーカスエラー信号のいずれか一方のエラー信号を生成する再生部60と、光ディスクの傷の有無とその領域を、エラー信号の変動量を閾値判定することによって検出する傷検出部90と、モータを基準回転速度で回転させたときに変動量が所定の閾値を超える傷有りと判定された場合、変動量が所定の閾値以下となるようにモータの回転速度を変更するモータ制御部62と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は光ディスク装置及びその制御方法に係り、特に、光ディスクの回転制御技術に関する。
【背景技術】
【0002】
CDやDVD等の光ディスクを再生する場合、光ディスクの傷や汚れ等によって読み取りエラーが発生することがある。読み取りエラーが発生した場合、同じ箇所の読み取りを何度か繰り返すリトライ処理を行うことが多い。さらに、リトライ処理を複数回行ってもデータが正常に読み取れない場合には、光ディスクの回転速度を段階的に減速した後リトライ処理を行う場合がある。
【0003】
特許文献1には、このリトライ処理に関する技術が開示されている。特許文献1が開示する技術は、回転速度を減速しなければ読み取れない光ディスクに対して、そのディスク識別情報と減速しなければ読み取れない領域のアドレスとをメモリに保存しておき、この光ディスクが再度挿入された場合、上記アドレスに達する前に予め読み取り可能な回転速度に減速する、というものである。
【特許文献1】特開2004−152379号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、一口に傷や汚れといっても、その大きさや種類によって影響の受け方は異なってくる。例えば、光ディスクの表面に比較的大きな傷が生じたり、比較的大きな汚れが付着したりすることによって記録面からの反射光のレベルが大きく低下し、その結果記録データが読み取れなく場合や、傷や汚れの大きさは比較的小さく反射光のレベル低下はそれ程大きくないものの、傷や汚れによってトラッキングサーボやフォーカスサーボが擾乱を受け、或いは一時的にロックオフすることによって記録データが読み取れなくなる場合がある。後者の場合、光ディスクの回転速度を下げるのではなく、むしろ回転速度を上げることによって外乱周波数成分が高くなり、その結果サーボ系による外乱抑圧機能が高まる場合がある。
【0005】
この他、製造規格上は許容されるものの、動作状態によってはデータの再生に影響を与えかねない傷をもった光ディスクもある。例えば、本来滑らかな螺旋状であるべきトッラクの一部に微小な径方向の段差が傷として形成される場合がある。このような微小な段差はトラッキングサーボ系へ影響を与え、その影響の程度は、回転速度を上げることによって大きくなる。
【0006】
このように傷や汚れの影響と回転速度との関係は必ずしも単純ではなく、回転速度を上げた方が傷や汚れの影響が少なくなる場合と、回転速度を下げた方が傷や汚れの影響が少なくなる場合がある。
【0007】
本発明は上記事情に鑑みてなされたものであり、傷や汚れ等の状況に応じて光ディスクの回転速度の増減を制御し、傷や汚れ等による再生能力の低下を防止することができる光ディスク装置及びその制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明に係る光ディスク装置は、請求項1に記載したように、光ディスクを回転させるモータと、前記光ディスクを再生し、RF信号、及び少なくともトラッキングエラー信号及びフォーカスエラー信号のいずれか一方のエラー信号を生成する再生部と、前記光ディスクの傷の有無とその領域を、前記エラー信号の変動量を閾値判定することによって検出する傷検出部と、前記モータを基準回転速度で回転させたときに前記変動量が所定の閾値を超える傷有りと判定された場合、前記変動量が所定の閾値以下となるように前記モータの回転速度を変更するモータ制御部と、を備えたことを特徴とする。
【0009】
また、上記課題を解決するため、本発明に係る光ディスク装置の制御方法は、請求項6に記載したように、(a)光ディスクをモータによって回転させ、(b)前記光ディスクを再生し、RF信号、及び少なくともトラッキングエラー信号及びフォーカスエラー信号のいずれか一方のエラー信号を生成し、(c)前記光ディスクの傷の有無とその領域を、前記エラー信号の変動量を閾値判定することによって検出し、(d)前記モータを基準回転速度で回転させたときに前記変動量が所定の閾値を超え傷有りと判定された場合、前記変動量が前記所定の閾値以下となるように前記モータの回転速度を変更する、ステップを備えたことを特徴とする。
【発明の効果】
【0010】
本発明に係る光ディスク装置及びその制御方法によれば、傷や汚れ等の状況に応じて光ディスクの回転速度の増減を制御し、傷や汚れ等による再生能力の低下を防止することができる。
【発明を実施するための最良の形態】
【0011】
(1)光ディスク装置の構成と全般動作
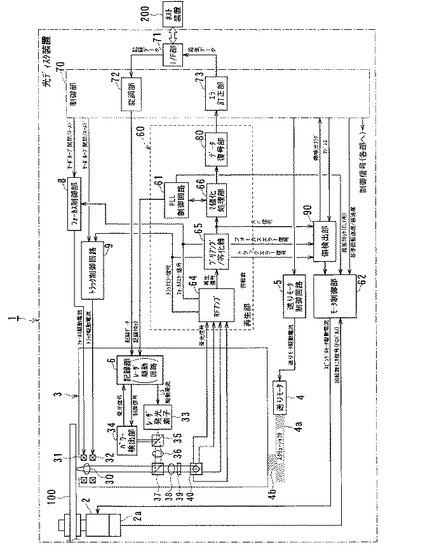
図1は、本実施形態に係る光ディスク装置1の構成例を示す図である。
【0012】
図1に示した光ディスク装置1は、CD−R、CD−RW、CD−RAM、DVD−R、DVD−RW、DVD−RAM等の記録型光ディスク100に対して、記録と再生の双方が可能な構成を示しているが、本発明は再生専用の光ディスク装置に対しても適用可能である。
【0013】
光ディスク100には、螺旋状に溝が刻まれており、溝の凹部をグルーブ、凸部をランドと呼び、グループ又はランドの一周をトラックと呼ぶ。ユーザデータはこのトラック(グルーブのみ又はグルーブ及びランド)に沿って、強度変調されたレーザ光を照射してデータの符号長に対応するマークとスペースを形成することで記録される。
【0014】
データ再生は、記録時より弱いリードパワー(read power)のレーザ光をトラックに沿って照射して、トラック上にあるマーク及びスペースからの反射光の強度の変化を検出することにより行われる。記録されたデータの消去は、前記リードパワーより強いイレースパワー(erase power)のレーザ光をトラックに沿って照射し、記録層を結晶化することにより行われる。
【0015】
なお、再生専用の光ディスク100、例えばCD−ROMやDVD−ROMの場合、記録情報に対応するピットが予めトラック上に形成されており、ピットの有無によって変化する反射光の強弱によって再生信号を生成している。
【0016】
光ディスク100はスピンドルモータ2によって回転駆動される。スピンドルモータ2に設けられたロータリエンコーダ2aからは回転数モニタ信号が出力される。ロータリエンコーダ2aの内部には、例えばホール素子が等間隔に配置されており、スピンドルモータ2が回転すると、各ホール素子からパルス(FGパルス:Frequency Generator pulseと呼ばれることもある)が出力され、スピンドルモータ2の1回転で所定数の複数パルスがロータリエンコーダ2aから出力される。このFGパルスをカウントするにことによってスピンドルモータ2の回転速度を検出することができる。
【0017】
モータ制御部62では、ロータリエンコーダ2aから出力される回転速度情報(回転数モニタ信号)が、制御部70から指示される基準回転速度に一致するように、一定回転速度(角速度)制御(CAV:Constant Angular Velocity)を行っている。
【0018】
また、モータ制御部62では、一定線速度制御(CLV:Constant Linear Velocity)も行っている。CLVは、トラックの線速度が一定となるように回転速度を制御する方法であり、光ディスク100の内側では回転速度が高く、外側では回転速度が低くなるように制御している。CLVでは、再生信号からPLL制御回路61によって再生クロックを生成し、この再生クロックの周波数が一定となるように回転速度の制御を行っている。
【0019】
本実施形態では、後述するように、光ディスク100の傷の状況に応じてスピンドルモータ2の回転速度を変更する制御を行っているが、この傷の状況に応じた回転速度制御もモータ制御部62で行っている。
【0020】
光ディスク100に対する情報の記録、再生は、光ピックアップ3によって行われる。光ピックアップ3は、送りモータ4と、ギア4b及びスクリューシャフト4aを介して連結されており、この送りモータ4は、例えばステッピングモータであり、送りモータ制御回路5により制御される。送りモータ4が送りモータ制御回路5からの送りモータ駆動電流により回転することにより、光ピックアップ3が光ディスク100の半径方向に移動する。
【0021】
光ピックアップ3には、図示しないワイヤ或いは板バネによって支持された対物レンズ30が設けられている。対物レンズ30は駆動コイル31の駆動によりフォーカシング方向(対物レンズの光軸方向)への移動が可能である。また、駆動コイル32の駆動によりトラッキング方向(光ディスク100の径方向)への移動が可能である。
【0022】
レーザ駆動回路6は、変調部72にてEFM(Eight to Fourteen Modulation)方式や8/16変調方式等で変調された記録データ基づいて、書き込み用の駆動電流をレーザダイオード(レーザ発光素子)33に供給する。変調部72には、ホスト装置200からI/F部71を介して記録用のデータが供給される。
【0023】
一方、レーザ駆動回路6は情報読取り時には、書き込み用の駆動電流よりも小さな読み取り用の駆動電流をレーザダイオード33に提供する。
【0024】
フォトダイオード等により構成されるパワー検出部34(フロントモニタ(FM)と呼ぶ場合もある)はレーザ発光素子33が発生するレーザ光の一部をハーフミラー35により一定比率だけ分岐し、光量、即ち発光パワーに比例した信号を受光信号として検出する。検出した受光信号はレーザ駆動回路6にフィードバックされる。レーザ駆動回路6はパワー検出部34からの受光信号に基づいて、所定のレーザパワーで発光するように、レーザ発光素子33を制御する。
【0025】
レーザ発光素子33はレーザ駆動回路6から供給される駆動電流に応じてレーザ光を発生する。レーザ発光素子33から発せられるレーザ光は、コリメータレンズ36、ハーフプリズム37、対物レンズ30を介して光ディスク100上に照射される。
【0026】
一方、光ディスク100からの反射光は、対物レンズ30、ハーフプリズム37、集光レンズ38、およびシリンドリカルレンズ39を介して、光検出器40に導かれる。
【0027】
光検出器40は、例えば4分割の光検出セルから成り、これら光検出セルの検知信号は再生部60のRFアンプ64に出力される。RFアンプ64は光検知セルからの信号を処理し、ジャストフォーカスからの誤差を示すフォーカスエラー信号FE、レーザ光のビームスポット中心とトラック中心との誤差を示すトラッキングエラー信号TE、及び光検知セル信号の全加算信号である再生信号(RF信号とも呼ばれる)を生成する。
【0028】
フォーカスエラー信号FEはフォーカス制御部8に供給される。フォーカス制御部8は、フォーカスサーボループが閉じている状態では、フォーカスエラー信号FEに基づいてフォーカス駆動信号を生成する。フォーカス駆動信号はフォーカシング方向の駆動コイル31に供給され対物レンズ30を光軸方向に駆動する。この結果、レーザ光の焦点が光ディスク100の記録面上に常時ジャストフォーカスとなるフォーカスサーボ制御が行われる。なお、フォーカスサーボループの引き込み範囲にレーザ光の焦点を移動させるために、フォーカスサーチが行われるが、このときには制御部70からの制御信号によってフォーカスサーボループを開いた状態で焦点の移動が行われる。
【0029】
一方、トラッキングエラー信号TEはトラック制御回路9に供給される。トラック制御回路9はトラッキングエラー信号TEに応じてトラック駆動信号を生成する。トラック制御回路9から出力されるトラック駆動信号は、トラッキング方向の駆動コイル32に供給される。これによりレーザ光が光ディスク100上に形成されたトラック上を常にトレースするトラッキングサーボ制御が行われる。
【0030】
上記フォーカスサーボ制御およびトラッキングサーボ制御が行われることで、レーザ光の焦点は、光ディスク記録面のトラック上を精度良く追従することができる。この結果、光検出器40の各光検出セルの出力信号の全加算信号RFには、記録情報に対応して光ディスク100のトラック上に形成されたマークやスペースからの反射光の変化が正確に反映され、品質の良い再生信号を得ることができる。
【0031】
この再生信号(全加算信号或いはRF信号と呼ばれる)は、プリアンプ/等化器65に入力され、ここで適宜の振幅に増幅されアナログ的な波形整形が行われる。プリアンプ/等化器65の出力は、2値化処理部66に入力され、適宜の閾値でスライスされてデジタルデータに変換される。また、このデジタルデータの一部は、PLL制御回路61に入力され、デジタルデータの基本波成分から再生クロックが生成される。
【0032】
デジタル化された再生信号は、データ復号部80に入力される。データ復号部80では、再生信号に含まれる同期信号を検出し、同期信号に所定の遅延時間で連なっているデータ系列を抽出し、復号データを得る。
【0033】
データ復号部80から出力される復号データはエラー訂正部75に入力され、ここでエラー訂正処理が行われた後I/F部71を介してホスト装置200に出力される。
【0034】
本実施形態に係る光ディスク装置1では、傷検出部90を備えた構成としており、傷検出部90にて光ディスク100の傷の有無や傷のタイプ等を判断している。傷検出部90には、再生部60からトラッキングエラー信号及びフォーカスエラー信号の2つのエラー信号、及びRF信号が入力される。これらの信号に基づいて光ディスク100の傷の有無や傷のタイプ等を判断している。また、制御部70からは、光ディスク100のアドレス情報が入力され、傷と傷の位置との関連付けを行っている。
【0035】
(2)傷判定に基づく回転制御
以下、傷検出部90の詳細動作、及び傷判定に基づく回転制御動作について説明する。
【0036】
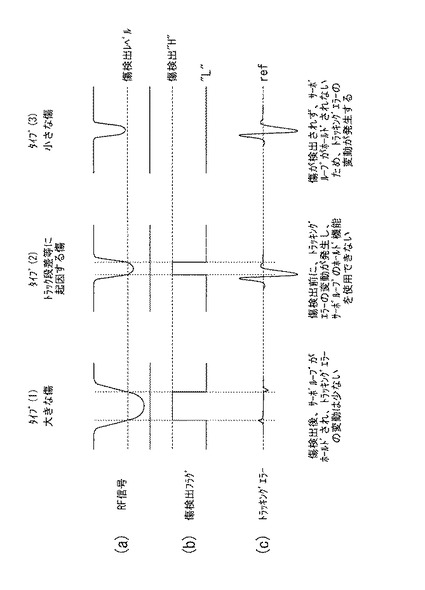
図2は、光ディスク100に見られる典型的な「傷」とその影響を3つのタイプに類型化して示した図である。図2(a)がRF信号の振幅を示す図、図2(b)が傷検出フラグを示す図、図2(c)がトラッキングエラーを示す図である。
【0037】
なお、ここでいう光ディスク100の「傷」とは、ディスク表面に生じたいわゆる通常の傷やディスク表面に付着した埃や汚れの他、記録データ以外の原因によって再生信号に不連続な変動を与える要因のことをいうものとする。
【0038】
タイプ(1)の傷は、比較的大きな傷が光ディスク100の表面(レーザ光が照射される側の表面)に生じた場合や、比較的大きな汚れ等が光ディスク100の表面に付着した場合等に生じる傷である。
【0039】
タイプ(1)の傷では、光ディスク100の記録面からの反射レベルが低下することに起因してRF信号の振幅が低下する。本実施形態に係る光ディスク装置1も含めて、多くの光ディスク装置では、RF信号の振幅低下をモニタしている。RF信号の振幅が所定の閾値(傷検出レベル)以下となった場合には、図2(b)に示すような「傷検出フラグ」を立て、傷に対処するための処理を行っている。傷対処処理の例として、傷検出フラグが立っている期間は、サーボループ(トラッキングサーボループやフォーカスサーボループ)をホールドし、サーボループがロックオフしたり、サーボループが擾乱を受けたりすることを防止している。
【0040】
図1において、傷検出部90はRF信号レベルをモニタしており、RF信号レベルが傷検出レベル以下に低下した場合は傷検出フラグを制御部70に出力する。制御部70では、傷検出フラグが入力されると、サーボループをホールドするための制御信号をフォーカス制御部8及びトラック制御回路9に出力し、それぞれのサーボループをホールドしている。
【0041】
タイプ(2)の傷は、サーボループの擾乱の要因となる傷の類型である。例えば、本来滑らかな螺旋状であるべきトッラクの一部に微小な径方向の段差が形成される場合がある。このような微小な段差はトラッキングサーボ系へ影響を与え、その影響の程度は、回転速度を上げることによって大きくなる。
【0042】
また、回転中心が偏心している場合には回転によって径方向に加速度が発生する。この加速度が大きくなるとトラッキングサーボ系へ影響を与える。この影響も回転速度が増加すると大きくなる。このような偏心に起因する現象もタイプ(2)の傷の影響と考えることができる。
【0043】
また、光ディスク100の記録面が完全に水平ではない場合、回転によって上下方向(レーザ光の光軸方向)に面振れが発生する。面振れが大きくなるとフォーカスサーボ系に影響を与え、この影響も回転速度が増加するにつれて大きくなる。この面振れもタイプ(2)の傷と考えることができる。
【0044】
タイプ(2)の傷では、図2(c)に示したように、まずトラッキングエラーやフォーカスエラーのエラー信号に変動が発生する。この結果、レーザ光の焦点位置がトラックや記録面からずれ、RF信号の振幅低下をもたらす。RF信号の振幅が傷検出レベル以下に下がると傷検出フラグが立つ。しかしながら、タイプ(2)の傷の場合、傷検出フラグが立つ前にエラー信号の変動が発生するため、傷検出フラグを用いたサーボループのホールド機能によってはエラー信号の変動を抑制することができない。
【0045】
エラー信号の変動が大きくなるとデータ誤りも増加する。データ誤りがエラー訂正部73の訂正能力範囲内であれば、誤り訂正が可能であるが、訂正能力を超えている場合はもはや訂正できない。この場合には、リトライ処理が行われ、訂正不能な領域の再度の読み出しが行われる。このため、音楽を再生している場合には音が出力されるまでに時間がかかる。また、場合によっては音飛びが発生する。
【0046】
タイプ(3)の傷は、発生要因としてはタイプ(1)の傷に類似するが、傷の大きさがタイプ(1)よりも小さく、RF信号の振幅低下が傷検出レベルに達しない範疇の傷である。このため、タイプ(3)の傷では、図2(b)に示したように傷検出フラグが立たず、サーボループのホールド機能は動作しない。
【0047】
タイプ(3)の傷によってもエラー信号の変動が発生するが、サーボループのホールド機能が動作しないため、エラー信号の変動を抑制することができない。
【0048】
タイプ(3)の傷の場合、光ディスク100の回転速度を増加させることによってエラー信号の変動はむしろ低減する。この理由は、光ディスク100の回転速度を上げることによって傷による外乱周波数成分が高くなり、その結果サーボ系による外乱抑圧機能が高まると考えられる。
【0049】
本実施形態に係る光ディスク装置1では、上記のようにサーボループのホールド機能が動作しない場合であっても、光ディスク100の回転速度を変更することによって、トラッキングサーボループやフォーカスサーボループのエラー信号の変動を抑制する処理を行っている。
【0050】
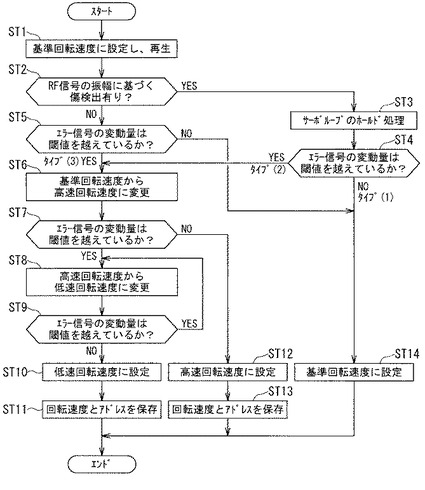
図3は、本実施形態に係る光ディスク装置1で行っている、傷の状況に基づく回転制御処理の一例を示すフローチャートである。
【0051】
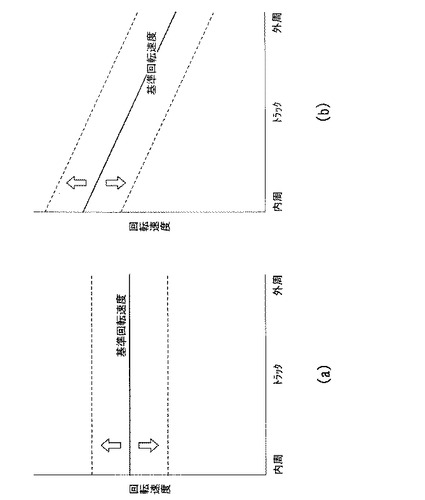
まず、ステップST1にて、光ディスク100の回転速度を基準回転速度に設定し、記録データを再生する。周知の通り、光ディスク100の回転制御方法は、角速度が一定となるように制御するCAV(Constant Angular Velocity)制御と、線速度が一定となるように制御するCLV(Constant Linear Velocity)制御とに大別できる。図4(a)はCAV制御を、また図4(b)はCLV制御の概念を模式的に示した図である。
【0052】
CAV制御では、トラックの位置に関わらず一定の基準回転速度で回転させる。CAV制御において回転速度を変更する場合、図4(a)において実線で示した基準回転速度から破線で示した変更後の速度に増減させる。
【0053】
CLV制御では、線速度を一定に制御するため、内側のトラックでは回転速度は高くなり、外側のトラックに移動するにつれて回転速度は減少する。CLV制御において回転速度を変更する場合、図4(b)において実線で示した基準回転速度から破線で示した変更後の速度に増減させる。なお、ステップST1における基準回転速度は、CLV制御の場合、特定のトラックでの基準回転速度である。
【0054】
次に、ステップST2では、RF信号の振幅に基づく傷の有無の判定を行う。この判定は、図2(a)に示した傷検出レベルを閾値として判定する。
【0055】
RF信号の振幅が傷検出レベル以下の場合には、傷判定フラグを立て制御部70に出力する。制御部70では、傷判定フラグに基づきサーボループのホールド処理を行う(ステップST3)。
【0056】
一方、傷検出部90では、さらにエラー信号の変動幅に対しても所定の閾値で閾値判定を行う。エラー信号の変動幅が閾値を超えていない場合(ステップST4のNO:図2のタイプ(1)の傷の場合)には、ステップST14へ進み、基準回転速度を維持する。即ち、タイプ(1)の傷の起因するエラー信号の変動量は、基準回転速度においても所定の閾値内に収まっているため、その回転速度を維持する。
【0057】
エラー信号の変動幅が閾値以上の場合(ステップST4のYES:図2のタイプ(2)の傷の場合)には、ステップST6に進む。
【0058】
他方、ステップST2にて、RF信号の振幅が傷検出レベルまで低下していないと判定された場合、引き続きステップST5にてエラー信号の変動量が所定の閾値を超えているか否かの判定を行う。エラー信号の変動量が所定の閾値を超えていない場合は、ステップST14へ進み、基準回転速度を維持する。
【0059】
ステップST5にてエラー信号の変動量が所定の閾値を超えていると判定された場合(図2のタイプ(3)の傷の場合)、ステップST6へ進む。
【0060】
ステップST6へは、タイプ(2)の傷又はタイプ(3)の傷の何れかが検出されたときに進むことになる。前述したように、タイプ(2)の傷は光ディスク100の回転速度を減少させることでその影響は低減される。一方、タイプ(3)の傷は逆に回転速度を増加させることによってその影響は低減される。
【0061】
そこで、ステップST6からステップST9の処理によって傷のタイプの判別を行い、その結果に応じて回転速度を増加させるか、或いは減少させるかを決定している。
【0062】
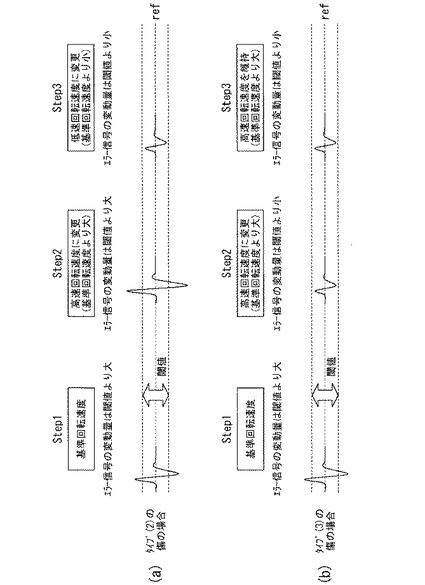
図5は、上記の判別処理とその後の回転速度の変更を模式的に説明する図である。図5(a)及び図5(b)の左側の図に示したように、基準回転速度において、タイプ(2)の傷とタイプ(3)の傷によるエラー信号の変動量は、いずれも閾値を超えている。
【0063】
そこで、まずステップST6にて、基準回転速度よりも高い回転速度(これを「高速回転速度」という)にスピンドルモータ2の回転速度を増加する。タイプ(2)の傷に起因するエラー信号の場合には、その変動量はさらに増加し、図5(a)の中央の図のように、閾値を超えているはずである。この判定をステップST7で行っている。高速回転速度で閾値を超えている場合は、タイプ(2)の傷があると判断する(ステップST7のYES)。タイプ(2)の傷の場合は、回転速度を減少させることによってエラー信号の変動量は低減するはずである。
【0064】
そこで、回転速度を基準回転速度よりも低い回転速度(これを「低速回転速度」という)に減少させる(ステップST8)。その後、エラー信号の変動量が閾値をまだ超えているか否かを判定する(ステップST9)。エラー信号の変動量がまだ閾値を超えている場合にはさらに回転速度を減少させ、これをエラー信号の変動量が閾値を超えなくなるまで繰り返す(図5(a)の右端の図)。最終的にエラー信号の変動量が閾値を超えなくなったときの回転速度を「低速回転速度」として設定する。(ステップST10)。この結果、タイプ(2)の傷に起因するエラー信号の変動量を低減させることができる。
【0065】
他方、ステップST6にて回転速度を増加させるとタイプ(3)の傷に起因するエラー信号の変動量は低減する。この結果、ステップST7の判定では閾値以下となる。そこで、このときの回転速度を「高速回転速度」として決定し維持する(ステップST12)。この結果、タイプ(3)の傷に起因するエラー信号の変動量を低減させることができる。
【0066】
また、夫々の傷のタイプに応じて決定された回転速度(最適回転速度)は、各傷のアドレスと共に適宜のメモリに保存される(ステップST11、13)。
【0067】
同一の光ディスク100を再生する場合には、このメモリを参照し、再生中のアドレスが保存された傷のアドレスの近傍に達した場合には、基準回転速度から予め決定されている最適回転速度に変更する。これにより、最適な回転速度を再度決定することなく、傷の影響を低減した回転制御が可能となる。
【0068】
以上説明してきたように、本実施形態に係る光ディスク装置1、及びその制御方法によれば、傷の状況に応じて光ディスクの回転速度の増減を制御し、傷に起因するエラー信号の変動を低減し、再生能力の低下を防止することができる。
【0069】
なお、本発明は上記の実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせても良い。
【図面の簡単な説明】
【0070】
【図1】本発明の実施形態に係る光ディスク装置の構成例を示す図。
【図2】光ディスクの傷のタイプとその影響の説明図。
【図3】本実施形態に係る、傷の状況に応じた回転速度制御の処理の一例を示すフローチャート。
【図4】CAV制御での回転速度制御と、CLV制御での回転速度制御の説明図。
【図5】タイプ(2)の傷とタイプ(3)の傷の場合での回転制御例を示す図。
【符号の説明】
【0071】
1 光ディスク装置
2 スピンドルモータ(モータ)
60 再生部
62 モータ制御部
70 制御部
90 傷検出部
【技術分野】
【0001】
本発明は光ディスク装置及びその制御方法に係り、特に、光ディスクの回転制御技術に関する。
【背景技術】
【0002】
CDやDVD等の光ディスクを再生する場合、光ディスクの傷や汚れ等によって読み取りエラーが発生することがある。読み取りエラーが発生した場合、同じ箇所の読み取りを何度か繰り返すリトライ処理を行うことが多い。さらに、リトライ処理を複数回行ってもデータが正常に読み取れない場合には、光ディスクの回転速度を段階的に減速した後リトライ処理を行う場合がある。
【0003】
特許文献1には、このリトライ処理に関する技術が開示されている。特許文献1が開示する技術は、回転速度を減速しなければ読み取れない光ディスクに対して、そのディスク識別情報と減速しなければ読み取れない領域のアドレスとをメモリに保存しておき、この光ディスクが再度挿入された場合、上記アドレスに達する前に予め読み取り可能な回転速度に減速する、というものである。
【特許文献1】特開2004−152379号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、一口に傷や汚れといっても、その大きさや種類によって影響の受け方は異なってくる。例えば、光ディスクの表面に比較的大きな傷が生じたり、比較的大きな汚れが付着したりすることによって記録面からの反射光のレベルが大きく低下し、その結果記録データが読み取れなく場合や、傷や汚れの大きさは比較的小さく反射光のレベル低下はそれ程大きくないものの、傷や汚れによってトラッキングサーボやフォーカスサーボが擾乱を受け、或いは一時的にロックオフすることによって記録データが読み取れなくなる場合がある。後者の場合、光ディスクの回転速度を下げるのではなく、むしろ回転速度を上げることによって外乱周波数成分が高くなり、その結果サーボ系による外乱抑圧機能が高まる場合がある。
【0005】
この他、製造規格上は許容されるものの、動作状態によってはデータの再生に影響を与えかねない傷をもった光ディスクもある。例えば、本来滑らかな螺旋状であるべきトッラクの一部に微小な径方向の段差が傷として形成される場合がある。このような微小な段差はトラッキングサーボ系へ影響を与え、その影響の程度は、回転速度を上げることによって大きくなる。
【0006】
このように傷や汚れの影響と回転速度との関係は必ずしも単純ではなく、回転速度を上げた方が傷や汚れの影響が少なくなる場合と、回転速度を下げた方が傷や汚れの影響が少なくなる場合がある。
【0007】
本発明は上記事情に鑑みてなされたものであり、傷や汚れ等の状況に応じて光ディスクの回転速度の増減を制御し、傷や汚れ等による再生能力の低下を防止することができる光ディスク装置及びその制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明に係る光ディスク装置は、請求項1に記載したように、光ディスクを回転させるモータと、前記光ディスクを再生し、RF信号、及び少なくともトラッキングエラー信号及びフォーカスエラー信号のいずれか一方のエラー信号を生成する再生部と、前記光ディスクの傷の有無とその領域を、前記エラー信号の変動量を閾値判定することによって検出する傷検出部と、前記モータを基準回転速度で回転させたときに前記変動量が所定の閾値を超える傷有りと判定された場合、前記変動量が所定の閾値以下となるように前記モータの回転速度を変更するモータ制御部と、を備えたことを特徴とする。
【0009】
また、上記課題を解決するため、本発明に係る光ディスク装置の制御方法は、請求項6に記載したように、(a)光ディスクをモータによって回転させ、(b)前記光ディスクを再生し、RF信号、及び少なくともトラッキングエラー信号及びフォーカスエラー信号のいずれか一方のエラー信号を生成し、(c)前記光ディスクの傷の有無とその領域を、前記エラー信号の変動量を閾値判定することによって検出し、(d)前記モータを基準回転速度で回転させたときに前記変動量が所定の閾値を超え傷有りと判定された場合、前記変動量が前記所定の閾値以下となるように前記モータの回転速度を変更する、ステップを備えたことを特徴とする。
【発明の効果】
【0010】
本発明に係る光ディスク装置及びその制御方法によれば、傷や汚れ等の状況に応じて光ディスクの回転速度の増減を制御し、傷や汚れ等による再生能力の低下を防止することができる。
【発明を実施するための最良の形態】
【0011】
(1)光ディスク装置の構成と全般動作
図1は、本実施形態に係る光ディスク装置1の構成例を示す図である。
【0012】
図1に示した光ディスク装置1は、CD−R、CD−RW、CD−RAM、DVD−R、DVD−RW、DVD−RAM等の記録型光ディスク100に対して、記録と再生の双方が可能な構成を示しているが、本発明は再生専用の光ディスク装置に対しても適用可能である。
【0013】
光ディスク100には、螺旋状に溝が刻まれており、溝の凹部をグルーブ、凸部をランドと呼び、グループ又はランドの一周をトラックと呼ぶ。ユーザデータはこのトラック(グルーブのみ又はグルーブ及びランド)に沿って、強度変調されたレーザ光を照射してデータの符号長に対応するマークとスペースを形成することで記録される。
【0014】
データ再生は、記録時より弱いリードパワー(read power)のレーザ光をトラックに沿って照射して、トラック上にあるマーク及びスペースからの反射光の強度の変化を検出することにより行われる。記録されたデータの消去は、前記リードパワーより強いイレースパワー(erase power)のレーザ光をトラックに沿って照射し、記録層を結晶化することにより行われる。
【0015】
なお、再生専用の光ディスク100、例えばCD−ROMやDVD−ROMの場合、記録情報に対応するピットが予めトラック上に形成されており、ピットの有無によって変化する反射光の強弱によって再生信号を生成している。
【0016】
光ディスク100はスピンドルモータ2によって回転駆動される。スピンドルモータ2に設けられたロータリエンコーダ2aからは回転数モニタ信号が出力される。ロータリエンコーダ2aの内部には、例えばホール素子が等間隔に配置されており、スピンドルモータ2が回転すると、各ホール素子からパルス(FGパルス:Frequency Generator pulseと呼ばれることもある)が出力され、スピンドルモータ2の1回転で所定数の複数パルスがロータリエンコーダ2aから出力される。このFGパルスをカウントするにことによってスピンドルモータ2の回転速度を検出することができる。
【0017】
モータ制御部62では、ロータリエンコーダ2aから出力される回転速度情報(回転数モニタ信号)が、制御部70から指示される基準回転速度に一致するように、一定回転速度(角速度)制御(CAV:Constant Angular Velocity)を行っている。
【0018】
また、モータ制御部62では、一定線速度制御(CLV:Constant Linear Velocity)も行っている。CLVは、トラックの線速度が一定となるように回転速度を制御する方法であり、光ディスク100の内側では回転速度が高く、外側では回転速度が低くなるように制御している。CLVでは、再生信号からPLL制御回路61によって再生クロックを生成し、この再生クロックの周波数が一定となるように回転速度の制御を行っている。
【0019】
本実施形態では、後述するように、光ディスク100の傷の状況に応じてスピンドルモータ2の回転速度を変更する制御を行っているが、この傷の状況に応じた回転速度制御もモータ制御部62で行っている。
【0020】
光ディスク100に対する情報の記録、再生は、光ピックアップ3によって行われる。光ピックアップ3は、送りモータ4と、ギア4b及びスクリューシャフト4aを介して連結されており、この送りモータ4は、例えばステッピングモータであり、送りモータ制御回路5により制御される。送りモータ4が送りモータ制御回路5からの送りモータ駆動電流により回転することにより、光ピックアップ3が光ディスク100の半径方向に移動する。
【0021】
光ピックアップ3には、図示しないワイヤ或いは板バネによって支持された対物レンズ30が設けられている。対物レンズ30は駆動コイル31の駆動によりフォーカシング方向(対物レンズの光軸方向)への移動が可能である。また、駆動コイル32の駆動によりトラッキング方向(光ディスク100の径方向)への移動が可能である。
【0022】
レーザ駆動回路6は、変調部72にてEFM(Eight to Fourteen Modulation)方式や8/16変調方式等で変調された記録データ基づいて、書き込み用の駆動電流をレーザダイオード(レーザ発光素子)33に供給する。変調部72には、ホスト装置200からI/F部71を介して記録用のデータが供給される。
【0023】
一方、レーザ駆動回路6は情報読取り時には、書き込み用の駆動電流よりも小さな読み取り用の駆動電流をレーザダイオード33に提供する。
【0024】
フォトダイオード等により構成されるパワー検出部34(フロントモニタ(FM)と呼ぶ場合もある)はレーザ発光素子33が発生するレーザ光の一部をハーフミラー35により一定比率だけ分岐し、光量、即ち発光パワーに比例した信号を受光信号として検出する。検出した受光信号はレーザ駆動回路6にフィードバックされる。レーザ駆動回路6はパワー検出部34からの受光信号に基づいて、所定のレーザパワーで発光するように、レーザ発光素子33を制御する。
【0025】
レーザ発光素子33はレーザ駆動回路6から供給される駆動電流に応じてレーザ光を発生する。レーザ発光素子33から発せられるレーザ光は、コリメータレンズ36、ハーフプリズム37、対物レンズ30を介して光ディスク100上に照射される。
【0026】
一方、光ディスク100からの反射光は、対物レンズ30、ハーフプリズム37、集光レンズ38、およびシリンドリカルレンズ39を介して、光検出器40に導かれる。
【0027】
光検出器40は、例えば4分割の光検出セルから成り、これら光検出セルの検知信号は再生部60のRFアンプ64に出力される。RFアンプ64は光検知セルからの信号を処理し、ジャストフォーカスからの誤差を示すフォーカスエラー信号FE、レーザ光のビームスポット中心とトラック中心との誤差を示すトラッキングエラー信号TE、及び光検知セル信号の全加算信号である再生信号(RF信号とも呼ばれる)を生成する。
【0028】
フォーカスエラー信号FEはフォーカス制御部8に供給される。フォーカス制御部8は、フォーカスサーボループが閉じている状態では、フォーカスエラー信号FEに基づいてフォーカス駆動信号を生成する。フォーカス駆動信号はフォーカシング方向の駆動コイル31に供給され対物レンズ30を光軸方向に駆動する。この結果、レーザ光の焦点が光ディスク100の記録面上に常時ジャストフォーカスとなるフォーカスサーボ制御が行われる。なお、フォーカスサーボループの引き込み範囲にレーザ光の焦点を移動させるために、フォーカスサーチが行われるが、このときには制御部70からの制御信号によってフォーカスサーボループを開いた状態で焦点の移動が行われる。
【0029】
一方、トラッキングエラー信号TEはトラック制御回路9に供給される。トラック制御回路9はトラッキングエラー信号TEに応じてトラック駆動信号を生成する。トラック制御回路9から出力されるトラック駆動信号は、トラッキング方向の駆動コイル32に供給される。これによりレーザ光が光ディスク100上に形成されたトラック上を常にトレースするトラッキングサーボ制御が行われる。
【0030】
上記フォーカスサーボ制御およびトラッキングサーボ制御が行われることで、レーザ光の焦点は、光ディスク記録面のトラック上を精度良く追従することができる。この結果、光検出器40の各光検出セルの出力信号の全加算信号RFには、記録情報に対応して光ディスク100のトラック上に形成されたマークやスペースからの反射光の変化が正確に反映され、品質の良い再生信号を得ることができる。
【0031】
この再生信号(全加算信号或いはRF信号と呼ばれる)は、プリアンプ/等化器65に入力され、ここで適宜の振幅に増幅されアナログ的な波形整形が行われる。プリアンプ/等化器65の出力は、2値化処理部66に入力され、適宜の閾値でスライスされてデジタルデータに変換される。また、このデジタルデータの一部は、PLL制御回路61に入力され、デジタルデータの基本波成分から再生クロックが生成される。
【0032】
デジタル化された再生信号は、データ復号部80に入力される。データ復号部80では、再生信号に含まれる同期信号を検出し、同期信号に所定の遅延時間で連なっているデータ系列を抽出し、復号データを得る。
【0033】
データ復号部80から出力される復号データはエラー訂正部75に入力され、ここでエラー訂正処理が行われた後I/F部71を介してホスト装置200に出力される。
【0034】
本実施形態に係る光ディスク装置1では、傷検出部90を備えた構成としており、傷検出部90にて光ディスク100の傷の有無や傷のタイプ等を判断している。傷検出部90には、再生部60からトラッキングエラー信号及びフォーカスエラー信号の2つのエラー信号、及びRF信号が入力される。これらの信号に基づいて光ディスク100の傷の有無や傷のタイプ等を判断している。また、制御部70からは、光ディスク100のアドレス情報が入力され、傷と傷の位置との関連付けを行っている。
【0035】
(2)傷判定に基づく回転制御
以下、傷検出部90の詳細動作、及び傷判定に基づく回転制御動作について説明する。
【0036】
図2は、光ディスク100に見られる典型的な「傷」とその影響を3つのタイプに類型化して示した図である。図2(a)がRF信号の振幅を示す図、図2(b)が傷検出フラグを示す図、図2(c)がトラッキングエラーを示す図である。
【0037】
なお、ここでいう光ディスク100の「傷」とは、ディスク表面に生じたいわゆる通常の傷やディスク表面に付着した埃や汚れの他、記録データ以外の原因によって再生信号に不連続な変動を与える要因のことをいうものとする。
【0038】
タイプ(1)の傷は、比較的大きな傷が光ディスク100の表面(レーザ光が照射される側の表面)に生じた場合や、比較的大きな汚れ等が光ディスク100の表面に付着した場合等に生じる傷である。
【0039】
タイプ(1)の傷では、光ディスク100の記録面からの反射レベルが低下することに起因してRF信号の振幅が低下する。本実施形態に係る光ディスク装置1も含めて、多くの光ディスク装置では、RF信号の振幅低下をモニタしている。RF信号の振幅が所定の閾値(傷検出レベル)以下となった場合には、図2(b)に示すような「傷検出フラグ」を立て、傷に対処するための処理を行っている。傷対処処理の例として、傷検出フラグが立っている期間は、サーボループ(トラッキングサーボループやフォーカスサーボループ)をホールドし、サーボループがロックオフしたり、サーボループが擾乱を受けたりすることを防止している。
【0040】
図1において、傷検出部90はRF信号レベルをモニタしており、RF信号レベルが傷検出レベル以下に低下した場合は傷検出フラグを制御部70に出力する。制御部70では、傷検出フラグが入力されると、サーボループをホールドするための制御信号をフォーカス制御部8及びトラック制御回路9に出力し、それぞれのサーボループをホールドしている。
【0041】
タイプ(2)の傷は、サーボループの擾乱の要因となる傷の類型である。例えば、本来滑らかな螺旋状であるべきトッラクの一部に微小な径方向の段差が形成される場合がある。このような微小な段差はトラッキングサーボ系へ影響を与え、その影響の程度は、回転速度を上げることによって大きくなる。
【0042】
また、回転中心が偏心している場合には回転によって径方向に加速度が発生する。この加速度が大きくなるとトラッキングサーボ系へ影響を与える。この影響も回転速度が増加すると大きくなる。このような偏心に起因する現象もタイプ(2)の傷の影響と考えることができる。
【0043】
また、光ディスク100の記録面が完全に水平ではない場合、回転によって上下方向(レーザ光の光軸方向)に面振れが発生する。面振れが大きくなるとフォーカスサーボ系に影響を与え、この影響も回転速度が増加するにつれて大きくなる。この面振れもタイプ(2)の傷と考えることができる。
【0044】
タイプ(2)の傷では、図2(c)に示したように、まずトラッキングエラーやフォーカスエラーのエラー信号に変動が発生する。この結果、レーザ光の焦点位置がトラックや記録面からずれ、RF信号の振幅低下をもたらす。RF信号の振幅が傷検出レベル以下に下がると傷検出フラグが立つ。しかしながら、タイプ(2)の傷の場合、傷検出フラグが立つ前にエラー信号の変動が発生するため、傷検出フラグを用いたサーボループのホールド機能によってはエラー信号の変動を抑制することができない。
【0045】
エラー信号の変動が大きくなるとデータ誤りも増加する。データ誤りがエラー訂正部73の訂正能力範囲内であれば、誤り訂正が可能であるが、訂正能力を超えている場合はもはや訂正できない。この場合には、リトライ処理が行われ、訂正不能な領域の再度の読み出しが行われる。このため、音楽を再生している場合には音が出力されるまでに時間がかかる。また、場合によっては音飛びが発生する。
【0046】
タイプ(3)の傷は、発生要因としてはタイプ(1)の傷に類似するが、傷の大きさがタイプ(1)よりも小さく、RF信号の振幅低下が傷検出レベルに達しない範疇の傷である。このため、タイプ(3)の傷では、図2(b)に示したように傷検出フラグが立たず、サーボループのホールド機能は動作しない。
【0047】
タイプ(3)の傷によってもエラー信号の変動が発生するが、サーボループのホールド機能が動作しないため、エラー信号の変動を抑制することができない。
【0048】
タイプ(3)の傷の場合、光ディスク100の回転速度を増加させることによってエラー信号の変動はむしろ低減する。この理由は、光ディスク100の回転速度を上げることによって傷による外乱周波数成分が高くなり、その結果サーボ系による外乱抑圧機能が高まると考えられる。
【0049】
本実施形態に係る光ディスク装置1では、上記のようにサーボループのホールド機能が動作しない場合であっても、光ディスク100の回転速度を変更することによって、トラッキングサーボループやフォーカスサーボループのエラー信号の変動を抑制する処理を行っている。
【0050】
図3は、本実施形態に係る光ディスク装置1で行っている、傷の状況に基づく回転制御処理の一例を示すフローチャートである。
【0051】
まず、ステップST1にて、光ディスク100の回転速度を基準回転速度に設定し、記録データを再生する。周知の通り、光ディスク100の回転制御方法は、角速度が一定となるように制御するCAV(Constant Angular Velocity)制御と、線速度が一定となるように制御するCLV(Constant Linear Velocity)制御とに大別できる。図4(a)はCAV制御を、また図4(b)はCLV制御の概念を模式的に示した図である。
【0052】
CAV制御では、トラックの位置に関わらず一定の基準回転速度で回転させる。CAV制御において回転速度を変更する場合、図4(a)において実線で示した基準回転速度から破線で示した変更後の速度に増減させる。
【0053】
CLV制御では、線速度を一定に制御するため、内側のトラックでは回転速度は高くなり、外側のトラックに移動するにつれて回転速度は減少する。CLV制御において回転速度を変更する場合、図4(b)において実線で示した基準回転速度から破線で示した変更後の速度に増減させる。なお、ステップST1における基準回転速度は、CLV制御の場合、特定のトラックでの基準回転速度である。
【0054】
次に、ステップST2では、RF信号の振幅に基づく傷の有無の判定を行う。この判定は、図2(a)に示した傷検出レベルを閾値として判定する。
【0055】
RF信号の振幅が傷検出レベル以下の場合には、傷判定フラグを立て制御部70に出力する。制御部70では、傷判定フラグに基づきサーボループのホールド処理を行う(ステップST3)。
【0056】
一方、傷検出部90では、さらにエラー信号の変動幅に対しても所定の閾値で閾値判定を行う。エラー信号の変動幅が閾値を超えていない場合(ステップST4のNO:図2のタイプ(1)の傷の場合)には、ステップST14へ進み、基準回転速度を維持する。即ち、タイプ(1)の傷の起因するエラー信号の変動量は、基準回転速度においても所定の閾値内に収まっているため、その回転速度を維持する。
【0057】
エラー信号の変動幅が閾値以上の場合(ステップST4のYES:図2のタイプ(2)の傷の場合)には、ステップST6に進む。
【0058】
他方、ステップST2にて、RF信号の振幅が傷検出レベルまで低下していないと判定された場合、引き続きステップST5にてエラー信号の変動量が所定の閾値を超えているか否かの判定を行う。エラー信号の変動量が所定の閾値を超えていない場合は、ステップST14へ進み、基準回転速度を維持する。
【0059】
ステップST5にてエラー信号の変動量が所定の閾値を超えていると判定された場合(図2のタイプ(3)の傷の場合)、ステップST6へ進む。
【0060】
ステップST6へは、タイプ(2)の傷又はタイプ(3)の傷の何れかが検出されたときに進むことになる。前述したように、タイプ(2)の傷は光ディスク100の回転速度を減少させることでその影響は低減される。一方、タイプ(3)の傷は逆に回転速度を増加させることによってその影響は低減される。
【0061】
そこで、ステップST6からステップST9の処理によって傷のタイプの判別を行い、その結果に応じて回転速度を増加させるか、或いは減少させるかを決定している。
【0062】
図5は、上記の判別処理とその後の回転速度の変更を模式的に説明する図である。図5(a)及び図5(b)の左側の図に示したように、基準回転速度において、タイプ(2)の傷とタイプ(3)の傷によるエラー信号の変動量は、いずれも閾値を超えている。
【0063】
そこで、まずステップST6にて、基準回転速度よりも高い回転速度(これを「高速回転速度」という)にスピンドルモータ2の回転速度を増加する。タイプ(2)の傷に起因するエラー信号の場合には、その変動量はさらに増加し、図5(a)の中央の図のように、閾値を超えているはずである。この判定をステップST7で行っている。高速回転速度で閾値を超えている場合は、タイプ(2)の傷があると判断する(ステップST7のYES)。タイプ(2)の傷の場合は、回転速度を減少させることによってエラー信号の変動量は低減するはずである。
【0064】
そこで、回転速度を基準回転速度よりも低い回転速度(これを「低速回転速度」という)に減少させる(ステップST8)。その後、エラー信号の変動量が閾値をまだ超えているか否かを判定する(ステップST9)。エラー信号の変動量がまだ閾値を超えている場合にはさらに回転速度を減少させ、これをエラー信号の変動量が閾値を超えなくなるまで繰り返す(図5(a)の右端の図)。最終的にエラー信号の変動量が閾値を超えなくなったときの回転速度を「低速回転速度」として設定する。(ステップST10)。この結果、タイプ(2)の傷に起因するエラー信号の変動量を低減させることができる。
【0065】
他方、ステップST6にて回転速度を増加させるとタイプ(3)の傷に起因するエラー信号の変動量は低減する。この結果、ステップST7の判定では閾値以下となる。そこで、このときの回転速度を「高速回転速度」として決定し維持する(ステップST12)。この結果、タイプ(3)の傷に起因するエラー信号の変動量を低減させることができる。
【0066】
また、夫々の傷のタイプに応じて決定された回転速度(最適回転速度)は、各傷のアドレスと共に適宜のメモリに保存される(ステップST11、13)。
【0067】
同一の光ディスク100を再生する場合には、このメモリを参照し、再生中のアドレスが保存された傷のアドレスの近傍に達した場合には、基準回転速度から予め決定されている最適回転速度に変更する。これにより、最適な回転速度を再度決定することなく、傷の影響を低減した回転制御が可能となる。
【0068】
以上説明してきたように、本実施形態に係る光ディスク装置1、及びその制御方法によれば、傷の状況に応じて光ディスクの回転速度の増減を制御し、傷に起因するエラー信号の変動を低減し、再生能力の低下を防止することができる。
【0069】
なお、本発明は上記の実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせても良い。
【図面の簡単な説明】
【0070】
【図1】本発明の実施形態に係る光ディスク装置の構成例を示す図。
【図2】光ディスクの傷のタイプとその影響の説明図。
【図3】本実施形態に係る、傷の状況に応じた回転速度制御の処理の一例を示すフローチャート。
【図4】CAV制御での回転速度制御と、CLV制御での回転速度制御の説明図。
【図5】タイプ(2)の傷とタイプ(3)の傷の場合での回転制御例を示す図。
【符号の説明】
【0071】
1 光ディスク装置
2 スピンドルモータ(モータ)
60 再生部
62 モータ制御部
70 制御部
90 傷検出部
【特許請求の範囲】
【請求項1】
光ディスクを回転させるモータと、
前記光ディスクを再生し、RF信号、及び少なくともトラッキングエラー信号及びフォーカスエラー信号のいずれか一方のエラー信号を生成する再生部と、
前記光ディスクの傷の有無とその領域を、前記エラー信号の変動量を閾値判定することによって検出する傷検出部と、
前記モータを基準回転速度で回転させたときに前記変動量が所定の閾値を超える傷有りと判定された場合、前記変動量が所定の閾値以下となるように前記モータの回転速度を変更するモータ制御部と、
を備えたことを特徴とする光ディスク装置。
【請求項2】
前記再生部は、
前記モータの回転速度を変更した後、変更前に傷有りと判定された領域を再度再生する、ことを特徴とする光ディスク装置。
【請求項3】
前記モータ制御部は、
前記基準回転速度よりも高い回転速度に変更したとき、
前記変動量が増加して前記所定の閾値をなお超えている場合には、前記モータの回転速度を前記基準回転速度よりも減少させ、
前記基準回転速度よりも高い回転速度に変更したとき、
前記変動量が減少して前記所定の閾値以下となった場合には、前記基準回転速度よりも高い回転速度を維持する、
ことを特徴とする請求項1に記載の光ディスク装置。
【請求項4】
前記モータ制御部は、
前記変動量に基づいて傷有りと判定された領域以外では、前記基準回転速度で前記モータを回転させる、
ことを特徴とする、請求項1に記載の光ディスク装置。
【請求項5】
前記モータ制御部は、
前記光ディスクの識別情報、前記変動量に基づいて傷有りと判定された領域、及び前記変更した回転速度とを記憶し、
同一の光ディスクを再度再生する場合には、記憶した前記領域では記憶した前記回転速度で前記モータを回転させる、
ことを特徴とする請求項1に記載の光ディスク装置。
【請求項6】
(a)光ディスクをモータによって回転させ、
(b)前記光ディスクを再生し、RF信号、及び少なくともトラッキングエラー信号及びフォーカスエラー信号のいずれか一方のエラー信号を生成し、
(c)前記光ディスクの傷の有無とその領域を、前記エラー信号の変動量を閾値判定することによって検出し、
(d)前記モータを基準回転速度で回転させたときに前記変動量が所定の閾値を超え傷有りと判定された場合、前記変動量が前記所定の閾値以下となるように前記モータの回転速度を変更する、
ステップを備えたことを特徴とする光ディスク装置の制御方法。
【請求項7】
(e)前記モータの回転速度を変更した後、変更前に傷有りと判定された領域を再度再生する、
ステップをさらに備えたことを特徴とする請求項6に記載の光ディスク装置の制御方法。
【請求項8】
ステップ(d)では、
前記基準回転速度よりも高い回転速度に変更したとき、
前記変動量が増加して前記所定の閾値をなお超えている場合には、前記モータの回転速度を前記基準回転速度よりも減少させ、
前記基準回転速度よりも高い回転速度に変更したとき、
前記変動量が減少して前記所定の閾値以下となった場合には、前記基準回転速度よりも高い回転速度を維持する、
ことを特徴とする請求項6に記載の光ディスク装置の制御方法。
【請求項9】
ステップ(d)では、
前記変動量に基づいて傷有りと判定された領域以外では、前記基準回転速度で前記モータを回転させる、
ことを特徴とする、請求項6に記載の光ディスク装置の制御方法。
【請求項10】
(f)前記光ディスクの識別情報、前記変動量に基づいて傷有りと判定された領域、及び前記変更した回転速度とを記憶し、
(g)同一の光ディスクを再度再生する場合には、記憶した前記領域では記憶した前記回転速度で前記モータを回転させる、
ステップをさらに備えたことを特徴とする請求項6に記載の光ディスク装置の制御方法。
【請求項1】
光ディスクを回転させるモータと、
前記光ディスクを再生し、RF信号、及び少なくともトラッキングエラー信号及びフォーカスエラー信号のいずれか一方のエラー信号を生成する再生部と、
前記光ディスクの傷の有無とその領域を、前記エラー信号の変動量を閾値判定することによって検出する傷検出部と、
前記モータを基準回転速度で回転させたときに前記変動量が所定の閾値を超える傷有りと判定された場合、前記変動量が所定の閾値以下となるように前記モータの回転速度を変更するモータ制御部と、
を備えたことを特徴とする光ディスク装置。
【請求項2】
前記再生部は、
前記モータの回転速度を変更した後、変更前に傷有りと判定された領域を再度再生する、ことを特徴とする光ディスク装置。
【請求項3】
前記モータ制御部は、
前記基準回転速度よりも高い回転速度に変更したとき、
前記変動量が増加して前記所定の閾値をなお超えている場合には、前記モータの回転速度を前記基準回転速度よりも減少させ、
前記基準回転速度よりも高い回転速度に変更したとき、
前記変動量が減少して前記所定の閾値以下となった場合には、前記基準回転速度よりも高い回転速度を維持する、
ことを特徴とする請求項1に記載の光ディスク装置。
【請求項4】
前記モータ制御部は、
前記変動量に基づいて傷有りと判定された領域以外では、前記基準回転速度で前記モータを回転させる、
ことを特徴とする、請求項1に記載の光ディスク装置。
【請求項5】
前記モータ制御部は、
前記光ディスクの識別情報、前記変動量に基づいて傷有りと判定された領域、及び前記変更した回転速度とを記憶し、
同一の光ディスクを再度再生する場合には、記憶した前記領域では記憶した前記回転速度で前記モータを回転させる、
ことを特徴とする請求項1に記載の光ディスク装置。
【請求項6】
(a)光ディスクをモータによって回転させ、
(b)前記光ディスクを再生し、RF信号、及び少なくともトラッキングエラー信号及びフォーカスエラー信号のいずれか一方のエラー信号を生成し、
(c)前記光ディスクの傷の有無とその領域を、前記エラー信号の変動量を閾値判定することによって検出し、
(d)前記モータを基準回転速度で回転させたときに前記変動量が所定の閾値を超え傷有りと判定された場合、前記変動量が前記所定の閾値以下となるように前記モータの回転速度を変更する、
ステップを備えたことを特徴とする光ディスク装置の制御方法。
【請求項7】
(e)前記モータの回転速度を変更した後、変更前に傷有りと判定された領域を再度再生する、
ステップをさらに備えたことを特徴とする請求項6に記載の光ディスク装置の制御方法。
【請求項8】
ステップ(d)では、
前記基準回転速度よりも高い回転速度に変更したとき、
前記変動量が増加して前記所定の閾値をなお超えている場合には、前記モータの回転速度を前記基準回転速度よりも減少させ、
前記基準回転速度よりも高い回転速度に変更したとき、
前記変動量が減少して前記所定の閾値以下となった場合には、前記基準回転速度よりも高い回転速度を維持する、
ことを特徴とする請求項6に記載の光ディスク装置の制御方法。
【請求項9】
ステップ(d)では、
前記変動量に基づいて傷有りと判定された領域以外では、前記基準回転速度で前記モータを回転させる、
ことを特徴とする、請求項6に記載の光ディスク装置の制御方法。
【請求項10】
(f)前記光ディスクの識別情報、前記変動量に基づいて傷有りと判定された領域、及び前記変更した回転速度とを記憶し、
(g)同一の光ディスクを再度再生する場合には、記憶した前記領域では記憶した前記回転速度で前記モータを回転させる、
ステップをさらに備えたことを特徴とする請求項6に記載の光ディスク装置の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2008−299901(P2008−299901A)
【公開日】平成20年12月11日(2008.12.11)
【国際特許分類】
【出願番号】特願2007−142015(P2007−142015)
【出願日】平成19年5月29日(2007.5.29)
【出願人】(504113008)東芝アルパイン・オートモティブテクノロジー株式会社 (110)
【Fターム(参考)】
【公開日】平成20年12月11日(2008.12.11)
【国際特許分類】
【出願日】平成19年5月29日(2007.5.29)
【出願人】(504113008)東芝アルパイン・オートモティブテクノロジー株式会社 (110)
【Fターム(参考)】
[ Back to top ]