
光ディスク装置及び光ディスク装置の制御方法
【課題】偏重心の検出が完了する以前から光ディスクの読み出しを可能にし、光ディスク装置に接続された装置でタイムアウトが発生するのを防ぐ。
【解決手段】光ディスクから反射したビームを検知信号として出力する光学センサと、検知信号からトラックエラー信号とレンズ変位信号を出力する信号生成部と、トラックエラー信号に基づいてビームのトラッキングを制御するトラッキングサーボ制御部と、光ディスクの回転速度を制御する回転制御部と、レンズ変位信号から光ディスクの偏重心を検出する偏重心検出部と、を備え、回転制御部が、光ディスクの目標回転速度を設定となるようにモータを制御し、偏重心検出部は、トラッキングサーボ制御部を機能させた状態で、レンズ変位信号の振幅に基づいて光ディスクの偏重心の有無を判定し、光ディスクに偏重心が有ると判定された場合には、目標回転速度を制限する。
【解決手段】光ディスクから反射したビームを検知信号として出力する光学センサと、検知信号からトラックエラー信号とレンズ変位信号を出力する信号生成部と、トラックエラー信号に基づいてビームのトラッキングを制御するトラッキングサーボ制御部と、光ディスクの回転速度を制御する回転制御部と、レンズ変位信号から光ディスクの偏重心を検出する偏重心検出部と、を備え、回転制御部が、光ディスクの目標回転速度を設定となるようにモータを制御し、偏重心検出部は、トラッキングサーボ制御部を機能させた状態で、レンズ変位信号の振幅に基づいて光ディスクの偏重心の有無を判定し、光ディスクに偏重心が有ると判定された場合には、目標回転速度を制限する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、光ディスク装置に関し、特に、光ディスクの偏重心を検出して光ディスクの回転速度を制御する光ディスク装置及び光ディスク装置の制御方法に関する。
【背景技術】
【0002】
光ディスク装置では、レーザ光を照射し、反射光を検出する光検出器を備えた光学ピックアップを、光ディスクの面に対向する方向(フォーカス方向)と、光ディスクの半径方向(トラッキング方向(またはスライド方向))に駆動して、光ディスクの情報記録面上でレーザ光が焦点を結ぶようにサーボ制御を行っている。
【0003】
光ディスク装置内で高速回転される光ディスクは、製造過程やラベルの付着などの原因により、光ディスクの重心位置が、回転中心位置から外れることがある(以後、「偏重心」という)。偏重心の光ディスクを高速で回転させると、光ディスク装置の内部機構が振動し、この振動に伴って騒音が発生し、上記サーボ制御が正しく行われなくなる可能性があった。
【0004】
従来、光ディスクの偏重心を検出する方法としては、一般に、ディスク回転に伴って発生する振動を検出することが行われている。また、従来、トラックアクチュエータのレンズ変位を示す信号として、レンズエラー信号を検出して光ディスクの偏重心量を検出する方法も知られている(例えば、特許文献1、2)。
【0005】
なお、レンズエラー信号を生成する方法としては、例えば、特許文献3に記載の中点サーボ装置が知られている。特許文献3では、レーザ光を照射した光ディスクからの反射光を受光して得られた光検出信号から生成されたMPP(Main Beam Push-Pull)信号とSPP(Sub Beam Push-Pull)信号とを演算することによりレンズエラー信号を生成している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−252767号公報
【特許文献2】特開2005−116042号公報
【特許文献3】特開平11−224430号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記従来例では、トラッキング方向のサーボ制御を停止した状態で、光ディスクを所定の回転速度で回転させ、偏重心により光ディスク装置に振動が発生すると、レンズエラー信号も変動することから偏重心を検出している。従来の技術では、所定の回転速度まで光ディスクの回転速度の上昇を待ってから、レンズエラー信号による偏重心の検出を行うため、偏重心の検出が完了するまでは、トラッキング方向のサーボ制御を停止しているため、光ディスクの読み出しを行うことができない、という問題があった。
【0008】
さらに、光ディスクを挿入した後、光ディスク装置が第1回目の読み出しの指令を受信したときに上記偏重心の検出を実施する場合では、偏重心の検出が完了する前に、読み出しの指令を送信した装置でタイムアウトになる場合があった。例えば、光ディスク装置に接続された装置が計算機の場合、OS(Operating System)によっては、読み出しのコマンドを送信してから所定時間以内に応答がないと、タイムアウトのエラーとなる場合があった。
【0009】
そこで本発明は、上記問題点に鑑みてなされたもので、偏重心の検出が完了する以前から光ディスクの読み出しを可能にして、光ディスク装置に接続された装置でタイムアウトが発生するのを防止することを目的とする。
【課題を解決するための手段】
【0010】
本発明は、光ディスクにレーザからのビームを照射する対物レンズと、前記対物レンズを駆動して前記光ディスクに照射するビームをトラック方向で移動させるアクチュエータと、前記光ディスクから反射した前記ビームを検知し、検知信号として出力する光学センサと、前記光学センサの検知信号から前記ビームのトラック方向のずれをトラックエラー信号として出力し、前記光学センサの検知信号から前記対物レンズのトラック方向の変位をレンズ変位信号として出力する信号生成部と、前記トラックエラー信号を入力し、前記アクチュエータを駆動して前記ビームのトラッキングを制御するトラッキングサーボ制御部と、モータに駆動された前記光ディスクの回転速度を制御する回転制御部と、前記レンズ変位信号を入力として前記光ディスクの偏重心を検出する偏重心検出部と、を備えた光ディスク装置において、前記回転制御部は、前記光ディスクの目標回転速度を設定する目標回転速度格納部と、前記光ディスクの回転速度を検出する回転速度検出部と、前記検出された回転速度が目標回転速度となるように前記モータを制御し、前記偏重心検出部は、前記トラッキングサーボ制御部を機能させた状態で、前記回転制御部の目標回転速度格納部に所定の目標回転速度を設定して前記レンズ変位信号を読み込む信号処理部と、前記レンズ変位信号の振幅に基づいて前記光ディスクの偏重心の有無を判定する判定部と、前記光ディスクに偏重心が有ると判定された場合には、前記目標回転速度を制限する回転速度規制部と、を備える。
【発明の効果】
【0011】
したがって、本発明によれば、トラッキングサーボ制御部を機能させた状態で偏重心の検出を行うので、偏重心の検出処理が完了する以前から光ディスクの読み出しが可能となって、光ディスク装置に接続された装置にタイムアウトが発生するのを防止できる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態を示し、光ディスク装置の構成を示すブロック図である。
【図2】本発明の実施形態を示し、制御部で行われる処理の一例を示すフローチャートである。
【図3】本発明の実施形態を示し、偏重心量が小さい場合における対物レンズの変位量とディスク回転位置と時間の関係を示すグラフである。
【図4】本発明の実施形態を示し、偏重心量が大きい場合における対物レンズの変位量とディスク回転位置と時間の関係を示すグラフである。
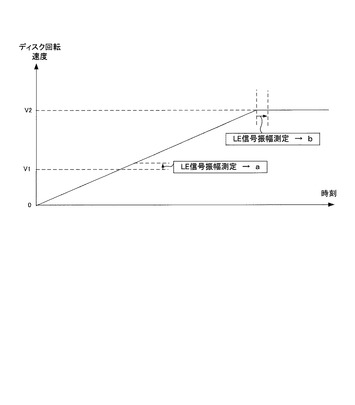
【図5】本発明の実施形態を示し、光ディスクの回転速度とレンズエラー信号の測定時刻の関係を示すグラフである。
【発明を実施するための形態】
【0013】
以下、本発明の一実施形態を添付図面に基づいて説明する。
【0014】
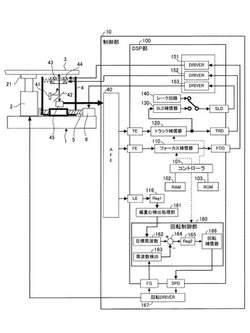
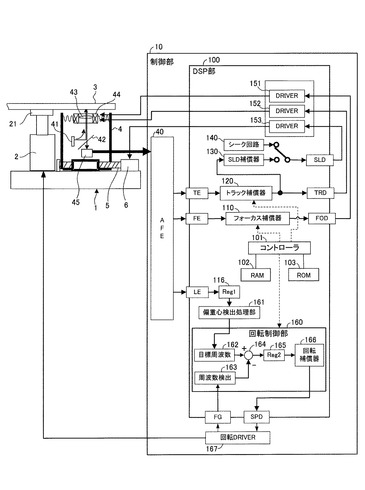
図1は、本発明の実施の形態の光ディスク装置の構成を示すブロック図である。
【0015】
光ディスク装置は、ベース1上に光ディスク3を回転させるスピンドルモータ2とレーザ光の照射及び反射光の検出を行うピックアップ4と、ピックアップ4を光ディスク3の半径方向(トラッキング方向またはスレッド方向)やフォーカス方向(光ディスク3の記録面に接離する方向)を駆動するアクチュエータを配置し、ピックアップ4から検出した信号に基づいて、アクチュエータを制御する制御部10を主体として構成される。
【0016】
ベース1上には、スピンドルモータ2が搭載されている。このスピンドルモータ2の回転軸の先端に取り付けられたターンテーブル21には、情報の記録又は再生を可能にする光情報記録媒体である光ディスク3が装着され、制御部10がスピンドルモータ2を所定の速度で回転駆動する。
【0017】
ベース1上には、上記スピンドルモータ2に隣接して、内部に発光源である半導体レーザ41、レーザ光のビームを反射/透過して所定の方向に導くハーフミラー42、レーザ光を集光して光ディスク3の情報記録面(図中下面)に照射する対物レンズ43、対物レンズ43の位置を、電磁力を利用して光ディスク3の情報記録面に対して微細に制御するボイスコイル等からなるアクチュエータ44、対物レンズ43を介して前記情報記録面からの反射光を検出する光検出素子45などを備えた、いわゆるピックアップ4が、例えば、ラックアンドピニオン5などによって、上記光ディスクの半径方向に自在に移動可能に取り付けられている。なお、ラックアンドピニオン5のピニオンにはラックを駆動してピックアップ4をスレッド(半径方向でトラック間の移動)方向に駆動するためのモータ6が結合されている。
【0018】
なお、アクチュエータ44は、対物レンズ43をフォーカス方向に変位させるフォーカス駆動部と、対物レンズ43を光ディスク3の径方向に変位させるトラッキング駆動部を含む。上記アクチュエータ44及びピックアップ4の構成については、公知または周知の技術を用いればよいので、個々では詳述しない。
【0019】
ピックアップ4内でアクチュエータ44によって駆動される対物レンズ43の情報記録面に対する相対的な位置と、スピンドルモータ2で駆動される光ディスク3の回転速度(ディスク回転速度)及び、ラックアンドピニオン5及びモータ6によって光ディスク3の半径方向でピックアップ4のトラックの位置は、制御部10によって制御される。
【0020】
制御部10は、アナログ信号を処理するアナログ・フロント・エンド(AFE)部40と、プロセッサを含むシステムコントローラ101を主体としてデジタル信号を処理するデジタル・シグナル・プロセッサ(DSP)部100を備える。また、制御部10は図示しないインターフェースを備えて、計算機などの外部の装置に接続される。
【0021】
ピックアップ4において、前記光ディスク3の情報記録面からの反射光を検出する光検出素子45で検出した信号は、制御部10のアナログ・フロント・エンド(AFE)部40に入力される。AFE部40は、各種のアナログ演算を行う演算部を備えており、アナログ・フロント・エンド(AFE)部40に入力された光検出素子45からの信号に各種の処理を施して、トラッキングエラー信号(TE信号)とフォーカスエラー信号(FE信号)及びレンズエラー信号(LE信号)などを生成する。AFE部40で生成されたトラッキングエラー信号とフォーカスエラー信号及びレンズエラー信号は、図示しないA/D変換器を介してデジタル信号に変換された後、以下に説明するDSP部100へ入力され、所定の処理が行われる。なお、レンズエラー信号は、DSP部100のレジスタ(Reg1)116に格納される。また、レンズエラー信号は、前記従来例の特許文献3のように、レーザ光を照射した光ディスクのピットまたはトラックからの反射光を受光して得られた光検出信号から生成された対物レンズ43のトラックの中点からの変位(ずれ)を示す信号であればよい。
【0022】
なお、DSP部100は、演算素子であるCPU(またはプロセッサ)を含むシステムコントローラ101と共に、データやプログラムを格納するRAM102やROM103、駆動信号を増幅するドライバなど各種の素子で構成されており、図1においてDSP部100は、機能要素によって、機能ブロック図として示されている。なお、システムコントローラ101で実行する光ディスク装置の制御プログラムは、記憶媒体としてのROM103に格納され、光ディスク装置の起動の度にRAM102にロードされてシステムコントローラ101のCPUにて実行される。
【0023】
DSP部100には、まず、AFE部40からのトラッキングエラー信号を入力してトラッキングドライバ(TRD)信号とスレッド駆動(SLD)信号を出力するトラッキングサーボ系がトラック補償器120を中心として構成され、AFE部40からのフォーカスエラー信号を入力してフォーカス駆動(FOD)信号を出力するフォーカスサーボ系がフォーカス補償器110を中心として構成され、スピンドルモータ2の回転周波数(FG)信号を入力してシステムコントローラ101が指令した回転速度となるように光ディスク3を駆動する回転速度(SPD)信号を出力する回転サーボ系が回転制御部160を中心として構成される。なお、回転制御部160は、後述するように、AFE部40からのレンズエラー信号をレジスタ(Reg1)116から読み込んで、後述の偏重心の検出処理を実行する。そして、光ディスク3に所定の偏重心が存在する場合にはシステムコントローラ101が回転速度(SPD)信号の値を制限する。
【0024】
トラッキングサーボ系のトラック補償器120は、AFE部40から入力されたトラッキングエラー信号に基づいてシステムコントローラ101が指令したトラックを保持するようにトラッキングドライバ信号TRDを補正する。
【0025】
トラック補償器120の出力TRDは、ピックアップ4を光ディスク3の径方向に変位させるピニオンのモータ6を駆動するスレッド駆動信号SLDを出力するSLD補償器130と、ドライバ回路152に入力される。ドライバ回路152は、トラッキングドライバ信号TRDを増幅して、アクチュエータ44のトラッキング部を駆動し、対物レンズ43の位置を光ディスク3の径方向に変位させて、光ディスク3の情報記録面のトラックからのずれを補正する。
【0026】
SLD補償器130は、システムコントローラ101が指令したトラックと対物レンズ43が対向するようにスレッド駆動信号SLDを補正する。なお、ピックアップ4のシーク時には、現在アドレスと目標アドレスの情報からシーク回路140でピックアップ4を変位させるスレッド駆動信号SLDが出力され、スイッチ131によってシーク回路140またはSLD補償器130のスレッド駆動信号が選択される。スイッチ131の後段は、スレッド駆動信号SLDでモータ6を駆動するドライバ回路153に接続される。
【0027】
上記トラッキングサーボ系は、公知または周知の技術を適用すればよいので、本実施形態では詳述しない。
【0028】
次に、フォーカスサーボ系は、フォーカス補償器110が、AFE部40から入力されたフォーカスエラー信号に基づいて、レーザ光のビームが光ディスク3の情報記録面で合焦を保持するように対物レンズ43をフォーカス方向へ駆動するフォーカス駆動信号FODをドライバ回路151に出力する。ドライバ回路151は、フォーカス駆動信号FODに応じて対物レンズ43をフォーカス方向へ駆動する。なお、上記フォーカスサーボ系は、公知または周知の技術を適用すればよいので、本実施形態では詳述しない。
【0029】
回転サーボ系は、回転制御部160がスピンドルモータ2の回転ドライバ167から回転速度(検出周波数=FG信号)を入力して、システムコントローラ101が指令した目標周波数(目標回転速度)となるように回転速度信号SPDを補正する。回転制御部160が出力する回転速度信号SPDは、スピンドルモータ2を駆動する回転ドライバ167へ入力される。
【0030】
また、制御部10は、光ディスク3が挿入されて第1回目の読み出しを行う際には、トラッキングサーボ系を作動させた状態で、光ディスク3の偏重心の検出処理を行う。このため、制御部10のDSP部100は、レジスタ116からレンズエラー信号を読み込んで、レンズエラー信号のレベルから光ディスク3の偏重心の検出を行う偏重心検出処理部161を有する。
【0031】
偏重心検出処理部161は、レンズエラー信号のレベルから光ディスク3の偏重心を検出すると、回転制御部160に対して読み込み時の回転速度を制限するよう、目標回転速度に対応する目標周波数を制限する。
【0032】
ここで、回転制御部160は、光ディスク3の目標回転速度に対応する目標周波数を格納する目標周波数格納部162と、回転ドライバ167のFG信号から光ディスク3の回転速度に対応する周波数を検出する周波数検出部163と、目標周波数と検出された周波数の差分を演算し、第2のレジスタ(Reg2)165に格納する加算器164と、第2のレジスタ165に格納された目標周波数とFG信号からの周波数の差分に基づいて回転速度(SPD)信号を演算し、回転ドライバ167へ出力する回転補償器166と、から構成される。
【0033】
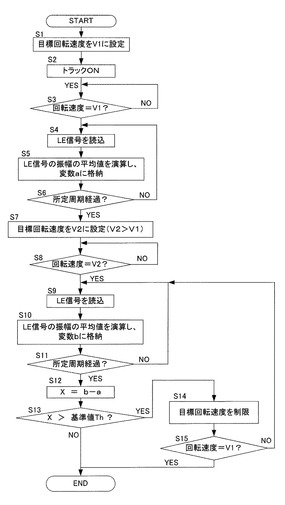
図2は、本発明の偏重心検出処理の一例を示すフローチャートである。この処理は、上述のように、光ディスク3が挿入されて第1回目の読み出しを行う際に、DSP部100のシステムコントローラ101で実行されるである。なお、システムコントローラ101は、図2の処理を実行することで、回転制御部160および偏重心検出処理部161として機能する。
【0034】
まず、ステップS1では、DSP部100のシステムコントローラ101は、目標回転速度を所定の低速度であるV1に設定し、目標周波数格納部162へ設定する。所定の低速度V1は、例えば、光ディスク3がDVDの場合、4倍速などに設定される。所定の低速度V1は、光ディスク3の種類に応じて適宜設定することができる。
【0035】
ステップS2では、システムコントローラ101が、トラッキングサーボ系を作動(ON)させる。トラック補償器120は、トラッキングエラー信号に基づいてシステムコントローラ101が指令したトラックを保持するようにトラッキングドライバ信号TRDを補正する。なお、フォーカスサーボ系はこの時点で作動しており、DSP部100は光ディスク3の記録面から情報を読み出して、図示しないインターフェースから外部へ送信することができる。
【0036】
次に、ステップS3では、システムコントローラ101が、回転ドライバ167からスピンドルモータ2の回転周波数(FG)信号を読み込んで、現在の光ディスク3の回転速度が、所定の低速度V1に対応する目標周波数に達するまで待機する。
【0037】
次に、ステップS4では、システムコントローラ101が、レジスタ(Reg1)116からレンズエラー(LE)信号を読み込む。
【0038】
ステップS5では、システムコントローラ101が、ステップS4で読み込んだレンズエラー信号の振幅の平均値を演算し、変数aに格納する。
【0039】
そして、ステップS6では、光ディスク3の回転周期が所定の周期となるまで、ステップS4、S5でレンズエラー信号の読み込みと平均値の演算を繰り返す。この所定の周期は、光ディスク3が1回転以上の値に設定すればよい。なお、所定の周期は、例えば、光ディスク3が数回転以上となる値に設定するのが望ましい。
【0040】
光ディスク3の回転数が所定の周期に達すると、ステップS7に進む。この時点で、変数aには、所定の低速度V1で光ディスク3を所定の回転数(周期)まで回転させたときのレンズエラー信号の振幅の平均値が格納される。
【0041】
次にステップS7では、システムコントローラ101は、目標回転速度を所定の低速度V1を超える所定の高速度であるV2に設定し、所定の高速度に対応する周波数を目標周波数格納部162へ設定する。所定の高速度V2は、例えば、光ディスク3がDVDの場合、8倍速などに設定される。所定の高速度V2は、光ディスク3の種類に応じて適宜設定することができ、光ディスク3の種類毎に、読み出しに用いる常用速度などに設定される。
【0042】
ステップS8では、システムコントローラ101が、回転ドライバ167からスピンドルモータ2の回転周波数(FG)信号を読み込んで、現在の光ディスク3の回転速度が、所定の高速度V2に対応する目標周波数に達するまで待機する。
【0043】
ステップS9では、システムコントローラ101が、レジスタ(Reg1)116からレンズエラー信号を読み込む。
【0044】
ステップS10では、システムコントローラ101が、ステップS9で読み込んだレンズエラー信号の振幅の平均値を演算し、変数bに格納する。この結果、変数bには、所定の高速度V2で光ディスク3を回転させたときのレンズエラー信号の振幅の平均値が格納される。
【0045】
そして、ステップS11では、光ディスク3の回転周期が所定の周期となるまで、ステップS9、S10でレンズエラー信号の読み込みと平均値の演算を繰り返す。光ディスク3の回転数が所定の周期に達すると、ステップS12に進む。この時点で、変数bには、所定の高速速度V2で光ディスク3を所定の回転数(周期)まで回転させたときのレンズエラー信号の振幅の平均値が格納される。
【0046】
ステップS12では、システムコントローラ101が、ステップS5とステップS10で求めた変数a、bの差分Xを、
X=(b−a)
として演算する。差分Xには、光ディスク3の回転速度が高速度V2のときに測定したレンズエラー信号の振幅(平均値)と、低速度V1のときに測定したレンズエラー信号の振幅(平均値)の差分が、光ディスク3の偏重心による対物レンズ43の変位量として設定される。なお、対物レンズ43の変位量は、光ディスク3の径方向への変位量である。
【0047】
ステップS13では、システムコントローラ101が、差分Xが所定の基準値Thを超えているか否かを判定する。差分Xが基準値Thを超えている場合、システムコントローラ101は、光ディスク3に偏重心があると判定してステップS14へ進む。この偏重心がある場合、光ディスク3を高速度V2で回転させると、光ディスク装置に振動に伴う騒音が発生する恐れがあるため、ステップS14以降では読み込みを行う光ディスク3の回転速度を規制する。
【0048】
一方、差分Xが基準値Th以下のる場合、システムコントローラ101は、光ディスク3に偏重心がない、あるいは偏重心による対物レンズ43の変位量が無視できる範囲であると判定して処理を終了する。この結果、読み込みを行う光ディスク3の回転速度は高速度V2を維持することになる。
【0049】
偏重心による対物レンズ43の変位量が基準値Thを超えたステップS14では、システムコントローラ101は、光ディスク3の目標回転速度を高速度V2から所定値または所定の比率で低下させる。例えば、段階的に2倍速づつ低下させる場合、現在の光ディスク3の回転速度が高速度V2(8倍速)のときには、低減量を「−2倍速」として「6倍速」を新たな回転速度とする。システムコントローラ101は、新たな目標回転速度に対応する周波数を目標周波数格納部162へ設定する。
【0050】
そして、ステップS15では、システムコントローラ101が、新たな目標回転速度が所定の低速度V1(4倍速)であるか否かを判定する。システムコントローラ101は、目標回転速度が所定の低速度V1(4倍速)であれば、そのまま処理を終了して、低速度V1で読み込み行う。一方、システムコントローラ101は、目標回転速度が所定の低速度V1でなければ、ステップS9に戻って、新たな目標回転速度でレンズエラー信号を測定し、差分Xと基準値Thとの比較を行う。
【0051】
以上のように、本発明では、トラッキングサーボ系を作動させた状態で、所定の低速度V1と所定の高速度V2でレンズエラー信号の振幅を測定することで偏重心の検出処理を行い、偏重心の検出が完了する以前から光ディスク3の読み出しを可能にし、光ディスク装置に接続された装置でタイムアウトが発生するのを防止することができるのである。
【0052】
さらに、所定の高速度V2で、差分Xが基準値Thを超えた場合には、光ディスク3の回転速度を段階的に低減することで、偏重心のある光ディスク3を可能な限り高い速度で回転させて読み込みを実施することができる。
【0053】
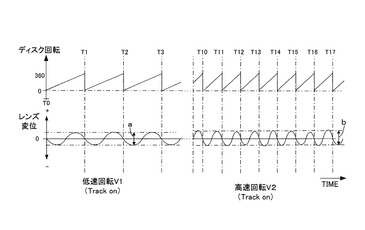
図3は、偏重心量が少ない光ディスク3の対物レンズ43の変位量(レンズエラー信号の振幅)と光ディスク3の回転位置と時間の関係を示すグラフである。なお、図中、+側が光ディスク3の外周側、−側が光ディスク3の内周側とする。図3において、時刻T0では光ディスク3の回転速度が所定の低速度V1に到達した刻T0からレンズエラー信号(対物レンズの変位量)の測定が開始される。制御部10は、T0〜T3までの所定の周期まで低速度V1でレンズエラー信号を測定し、対物レンズ43の変位量の平均値を演算して変数aに格納する。
【0054】
さらに、図中、時刻T10では光ディスク3の回転速度が所定の高速度V2になってからレンズエラー信号(対物レンズの変位量)の測定が開始される。制御部10は、光ディスク3の回転速度が所定の高速度V2に達すると、T10〜T13までの所定の周期まで測定し、レンズ変位量の平均値を演算して変数bに格納する。
【0055】
図3の例では、光ディスク3の偏重心量が小さいので、高速度V2でも低速度V1でも振幅は小さい。このため、b−aの差分Xが基準値Th以下となって、目標周波数格納部162には高速度V2に対応した値が保持される。
【0056】
図4は、偏重心量が多い光ディスク3のレンズの変位量(レンズエラー信号)と光ディスク3の回転位置と時間の関係を示すグラフである。図中、時刻T0では光ディスク3の回転速度が所定の低速度V1となった時刻T0からレンズエラー信号(レンズの変位量)の測定が開始される。制御部10は、T0〜T3までの所定の周期まで低速度V1でレンズエラー信号を測定し、レンズの変位量の平均値を演算して変数aに格納する。レンズの変位量は、図3に比して大きな値となる。
【0057】
さらに、図中、時刻T10では光ディスク3の回転速度が所定の高速度V2になってからレンズエラー信号(レンズの変位量)の測定が開始される。制御部10は、光ディスク3の回転速度が所定の高速度V2に達すると、T10〜T13までの所定の周期までレンズの変位量を測定し、レンズ変位量の平均値を演算して変数bに格納する。
【0058】
図4の例では、光ディスク3の偏重心量が大きいので、b−aの差分Xが基準値Thを超える。このため、システムコントローラ101は、目標回転速度を制限し、高速度V2から「−2倍速」だけ制限した「6倍速」の周波数に対応する周波数を目標周波数格納部162に設定する。システムコントローラ101は、この6倍速で、再び図2のステップS9からS13を実行し、差分Xが基準値Th以下であれば、この6倍速が読み出しに用いる回転速度となる。6倍速で測定した差分Xが基準値Thを超える場合には、さらに「−2倍速」だけ制限した「4倍速」を読み込みに用いる光ディスク3の回転速度とする。
【0059】
上記処理は、所定の低速度V1でレンズエラー信号を測定する低速信号処理部(S1〜S6)と、所定の高速度V2でレンズエラー信号を測定する高速信号処理部(S7〜S11)と、レンズエラー信号の振幅に基づいて偏重心の有無を判定する判定部(S12,S13)と、光ディスク3に偏重心が存在するときには光ディスク3の回転速度を制限する回転速度規制部(S14)から構成される。
【0060】
以上のように、本発明によれば、トラッキングサーボ系を作動させた状態で、レンズエラー信号(レンズの変位量)の振幅(振動)から偏重心の検出を行うことで、偏重心の検出が完了する以前から光ディスク3の読み出しが可能になって、光ディスク装置に接続された装置でタイムアウトが発生するのを防止することができる。さらに、所定の高速度V2で、差分Xが基準値Thを超えた場合には、光ディスク3の回転速度を徐々に低減することで、偏重心のある光ディスク3を可能な限り高い速度で回転させて読み込みを実施することができる。
【0061】
なお、上記実施形態において、レンズエラー信号は、対物レンズ43が光ディスク3の径方向へ変位する信号であれば良く、プッシュプルや位相差や3ビーム等の何れかを用いればよい。
【0062】
また、上記実施形態において、光ディスク3の回転速度の制限を行うか否かの判定を、低速度V1と高速度V2のレンズエラー信号の振幅の差分(b−a)で行う例を示したが、変数aと変数bの比(b/a)が所定の基準値Thrを超える場合に、回転速度の制限を行うようにしても良い。
【0063】
また、上記実施形態において、所定の低速度V1と高速度V2を維持してレンズエラー信号の振幅を行う例を示したが、図5で示すように、所定の低速度V2を目標回転速度として光ディスク3の回転速度を徐々に増大させ、所定の低速度V1に達してから所定の周期までレンズエラー信号の平均値を求めて変数aに格納する。その後、所定の高速度V2に達してから所定の周期までレンズエラー信号の平均値を求めて変数bに格納するようにしてもよい。つまり、回転速度の低速側では、所定の低速度V1の近傍でレンズエラー信号を測定するようにしてもよい。
【0064】
また、上記実施形態において、レンズエラー信号の振幅の平均値を用いる例を示したが、レンズエラー信号の振幅の最大値または最小値を用いて基準値と比較するようにしても良い。
【0065】
また、上記実施形態において、偏重心検出処理部161は、所定の低速度V1でのレンズエラー信号の振幅と、所定の高速度V2でのレンズエラー信号の振幅を比較する例を示したが、所定の高速度V2でのレンズエラー信号の振幅が基準値を超えたときに、光ディスク3に偏重心があると判定して、回転速度を制限してもよい。
【0066】
また、上記実施形態において、偏重心検出処理部161をDSP部100内に備えた例を示したが、偏重心検出処理部161は目標周波数格納部162にアクセスできればよいので、制御部10内の何れかに含まれればよい。
【0067】
また、上記実施形態において、システムコントローラ101は、各機能部のプログラムに従って動作することによって、所定の機能を実現する機能部として動作する。例えば、システムコントローラ101は、偏重心の検出処理プログラムに従って処理を行うことで偏重心検出処理部161として機能する。他のプログラムについても同様である。さらに、システムコントローラ101は、各プログラムが実行する複数の処理のそれぞれを実現する機能部としても動作する。
【符号の説明】
【0068】
3 光ディスク
43 対物レンズ
10 制御部
100 DSP部
101 システムコントローラ
120 トラック補償部
160 回転制御部
161 偏重心検出処理部
【技術分野】
【0001】
本発明は、光ディスク装置に関し、特に、光ディスクの偏重心を検出して光ディスクの回転速度を制御する光ディスク装置及び光ディスク装置の制御方法に関する。
【背景技術】
【0002】
光ディスク装置では、レーザ光を照射し、反射光を検出する光検出器を備えた光学ピックアップを、光ディスクの面に対向する方向(フォーカス方向)と、光ディスクの半径方向(トラッキング方向(またはスライド方向))に駆動して、光ディスクの情報記録面上でレーザ光が焦点を結ぶようにサーボ制御を行っている。
【0003】
光ディスク装置内で高速回転される光ディスクは、製造過程やラベルの付着などの原因により、光ディスクの重心位置が、回転中心位置から外れることがある(以後、「偏重心」という)。偏重心の光ディスクを高速で回転させると、光ディスク装置の内部機構が振動し、この振動に伴って騒音が発生し、上記サーボ制御が正しく行われなくなる可能性があった。
【0004】
従来、光ディスクの偏重心を検出する方法としては、一般に、ディスク回転に伴って発生する振動を検出することが行われている。また、従来、トラックアクチュエータのレンズ変位を示す信号として、レンズエラー信号を検出して光ディスクの偏重心量を検出する方法も知られている(例えば、特許文献1、2)。
【0005】
なお、レンズエラー信号を生成する方法としては、例えば、特許文献3に記載の中点サーボ装置が知られている。特許文献3では、レーザ光を照射した光ディスクからの反射光を受光して得られた光検出信号から生成されたMPP(Main Beam Push-Pull)信号とSPP(Sub Beam Push-Pull)信号とを演算することによりレンズエラー信号を生成している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−252767号公報
【特許文献2】特開2005−116042号公報
【特許文献3】特開平11−224430号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記従来例では、トラッキング方向のサーボ制御を停止した状態で、光ディスクを所定の回転速度で回転させ、偏重心により光ディスク装置に振動が発生すると、レンズエラー信号も変動することから偏重心を検出している。従来の技術では、所定の回転速度まで光ディスクの回転速度の上昇を待ってから、レンズエラー信号による偏重心の検出を行うため、偏重心の検出が完了するまでは、トラッキング方向のサーボ制御を停止しているため、光ディスクの読み出しを行うことができない、という問題があった。
【0008】
さらに、光ディスクを挿入した後、光ディスク装置が第1回目の読み出しの指令を受信したときに上記偏重心の検出を実施する場合では、偏重心の検出が完了する前に、読み出しの指令を送信した装置でタイムアウトになる場合があった。例えば、光ディスク装置に接続された装置が計算機の場合、OS(Operating System)によっては、読み出しのコマンドを送信してから所定時間以内に応答がないと、タイムアウトのエラーとなる場合があった。
【0009】
そこで本発明は、上記問題点に鑑みてなされたもので、偏重心の検出が完了する以前から光ディスクの読み出しを可能にして、光ディスク装置に接続された装置でタイムアウトが発生するのを防止することを目的とする。
【課題を解決するための手段】
【0010】
本発明は、光ディスクにレーザからのビームを照射する対物レンズと、前記対物レンズを駆動して前記光ディスクに照射するビームをトラック方向で移動させるアクチュエータと、前記光ディスクから反射した前記ビームを検知し、検知信号として出力する光学センサと、前記光学センサの検知信号から前記ビームのトラック方向のずれをトラックエラー信号として出力し、前記光学センサの検知信号から前記対物レンズのトラック方向の変位をレンズ変位信号として出力する信号生成部と、前記トラックエラー信号を入力し、前記アクチュエータを駆動して前記ビームのトラッキングを制御するトラッキングサーボ制御部と、モータに駆動された前記光ディスクの回転速度を制御する回転制御部と、前記レンズ変位信号を入力として前記光ディスクの偏重心を検出する偏重心検出部と、を備えた光ディスク装置において、前記回転制御部は、前記光ディスクの目標回転速度を設定する目標回転速度格納部と、前記光ディスクの回転速度を検出する回転速度検出部と、前記検出された回転速度が目標回転速度となるように前記モータを制御し、前記偏重心検出部は、前記トラッキングサーボ制御部を機能させた状態で、前記回転制御部の目標回転速度格納部に所定の目標回転速度を設定して前記レンズ変位信号を読み込む信号処理部と、前記レンズ変位信号の振幅に基づいて前記光ディスクの偏重心の有無を判定する判定部と、前記光ディスクに偏重心が有ると判定された場合には、前記目標回転速度を制限する回転速度規制部と、を備える。
【発明の効果】
【0011】
したがって、本発明によれば、トラッキングサーボ制御部を機能させた状態で偏重心の検出を行うので、偏重心の検出処理が完了する以前から光ディスクの読み出しが可能となって、光ディスク装置に接続された装置にタイムアウトが発生するのを防止できる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態を示し、光ディスク装置の構成を示すブロック図である。
【図2】本発明の実施形態を示し、制御部で行われる処理の一例を示すフローチャートである。
【図3】本発明の実施形態を示し、偏重心量が小さい場合における対物レンズの変位量とディスク回転位置と時間の関係を示すグラフである。
【図4】本発明の実施形態を示し、偏重心量が大きい場合における対物レンズの変位量とディスク回転位置と時間の関係を示すグラフである。
【図5】本発明の実施形態を示し、光ディスクの回転速度とレンズエラー信号の測定時刻の関係を示すグラフである。
【発明を実施するための形態】
【0013】
以下、本発明の一実施形態を添付図面に基づいて説明する。
【0014】
図1は、本発明の実施の形態の光ディスク装置の構成を示すブロック図である。
【0015】
光ディスク装置は、ベース1上に光ディスク3を回転させるスピンドルモータ2とレーザ光の照射及び反射光の検出を行うピックアップ4と、ピックアップ4を光ディスク3の半径方向(トラッキング方向またはスレッド方向)やフォーカス方向(光ディスク3の記録面に接離する方向)を駆動するアクチュエータを配置し、ピックアップ4から検出した信号に基づいて、アクチュエータを制御する制御部10を主体として構成される。
【0016】
ベース1上には、スピンドルモータ2が搭載されている。このスピンドルモータ2の回転軸の先端に取り付けられたターンテーブル21には、情報の記録又は再生を可能にする光情報記録媒体である光ディスク3が装着され、制御部10がスピンドルモータ2を所定の速度で回転駆動する。
【0017】
ベース1上には、上記スピンドルモータ2に隣接して、内部に発光源である半導体レーザ41、レーザ光のビームを反射/透過して所定の方向に導くハーフミラー42、レーザ光を集光して光ディスク3の情報記録面(図中下面)に照射する対物レンズ43、対物レンズ43の位置を、電磁力を利用して光ディスク3の情報記録面に対して微細に制御するボイスコイル等からなるアクチュエータ44、対物レンズ43を介して前記情報記録面からの反射光を検出する光検出素子45などを備えた、いわゆるピックアップ4が、例えば、ラックアンドピニオン5などによって、上記光ディスクの半径方向に自在に移動可能に取り付けられている。なお、ラックアンドピニオン5のピニオンにはラックを駆動してピックアップ4をスレッド(半径方向でトラック間の移動)方向に駆動するためのモータ6が結合されている。
【0018】
なお、アクチュエータ44は、対物レンズ43をフォーカス方向に変位させるフォーカス駆動部と、対物レンズ43を光ディスク3の径方向に変位させるトラッキング駆動部を含む。上記アクチュエータ44及びピックアップ4の構成については、公知または周知の技術を用いればよいので、個々では詳述しない。
【0019】
ピックアップ4内でアクチュエータ44によって駆動される対物レンズ43の情報記録面に対する相対的な位置と、スピンドルモータ2で駆動される光ディスク3の回転速度(ディスク回転速度)及び、ラックアンドピニオン5及びモータ6によって光ディスク3の半径方向でピックアップ4のトラックの位置は、制御部10によって制御される。
【0020】
制御部10は、アナログ信号を処理するアナログ・フロント・エンド(AFE)部40と、プロセッサを含むシステムコントローラ101を主体としてデジタル信号を処理するデジタル・シグナル・プロセッサ(DSP)部100を備える。また、制御部10は図示しないインターフェースを備えて、計算機などの外部の装置に接続される。
【0021】
ピックアップ4において、前記光ディスク3の情報記録面からの反射光を検出する光検出素子45で検出した信号は、制御部10のアナログ・フロント・エンド(AFE)部40に入力される。AFE部40は、各種のアナログ演算を行う演算部を備えており、アナログ・フロント・エンド(AFE)部40に入力された光検出素子45からの信号に各種の処理を施して、トラッキングエラー信号(TE信号)とフォーカスエラー信号(FE信号)及びレンズエラー信号(LE信号)などを生成する。AFE部40で生成されたトラッキングエラー信号とフォーカスエラー信号及びレンズエラー信号は、図示しないA/D変換器を介してデジタル信号に変換された後、以下に説明するDSP部100へ入力され、所定の処理が行われる。なお、レンズエラー信号は、DSP部100のレジスタ(Reg1)116に格納される。また、レンズエラー信号は、前記従来例の特許文献3のように、レーザ光を照射した光ディスクのピットまたはトラックからの反射光を受光して得られた光検出信号から生成された対物レンズ43のトラックの中点からの変位(ずれ)を示す信号であればよい。
【0022】
なお、DSP部100は、演算素子であるCPU(またはプロセッサ)を含むシステムコントローラ101と共に、データやプログラムを格納するRAM102やROM103、駆動信号を増幅するドライバなど各種の素子で構成されており、図1においてDSP部100は、機能要素によって、機能ブロック図として示されている。なお、システムコントローラ101で実行する光ディスク装置の制御プログラムは、記憶媒体としてのROM103に格納され、光ディスク装置の起動の度にRAM102にロードされてシステムコントローラ101のCPUにて実行される。
【0023】
DSP部100には、まず、AFE部40からのトラッキングエラー信号を入力してトラッキングドライバ(TRD)信号とスレッド駆動(SLD)信号を出力するトラッキングサーボ系がトラック補償器120を中心として構成され、AFE部40からのフォーカスエラー信号を入力してフォーカス駆動(FOD)信号を出力するフォーカスサーボ系がフォーカス補償器110を中心として構成され、スピンドルモータ2の回転周波数(FG)信号を入力してシステムコントローラ101が指令した回転速度となるように光ディスク3を駆動する回転速度(SPD)信号を出力する回転サーボ系が回転制御部160を中心として構成される。なお、回転制御部160は、後述するように、AFE部40からのレンズエラー信号をレジスタ(Reg1)116から読み込んで、後述の偏重心の検出処理を実行する。そして、光ディスク3に所定の偏重心が存在する場合にはシステムコントローラ101が回転速度(SPD)信号の値を制限する。
【0024】
トラッキングサーボ系のトラック補償器120は、AFE部40から入力されたトラッキングエラー信号に基づいてシステムコントローラ101が指令したトラックを保持するようにトラッキングドライバ信号TRDを補正する。
【0025】
トラック補償器120の出力TRDは、ピックアップ4を光ディスク3の径方向に変位させるピニオンのモータ6を駆動するスレッド駆動信号SLDを出力するSLD補償器130と、ドライバ回路152に入力される。ドライバ回路152は、トラッキングドライバ信号TRDを増幅して、アクチュエータ44のトラッキング部を駆動し、対物レンズ43の位置を光ディスク3の径方向に変位させて、光ディスク3の情報記録面のトラックからのずれを補正する。
【0026】
SLD補償器130は、システムコントローラ101が指令したトラックと対物レンズ43が対向するようにスレッド駆動信号SLDを補正する。なお、ピックアップ4のシーク時には、現在アドレスと目標アドレスの情報からシーク回路140でピックアップ4を変位させるスレッド駆動信号SLDが出力され、スイッチ131によってシーク回路140またはSLD補償器130のスレッド駆動信号が選択される。スイッチ131の後段は、スレッド駆動信号SLDでモータ6を駆動するドライバ回路153に接続される。
【0027】
上記トラッキングサーボ系は、公知または周知の技術を適用すればよいので、本実施形態では詳述しない。
【0028】
次に、フォーカスサーボ系は、フォーカス補償器110が、AFE部40から入力されたフォーカスエラー信号に基づいて、レーザ光のビームが光ディスク3の情報記録面で合焦を保持するように対物レンズ43をフォーカス方向へ駆動するフォーカス駆動信号FODをドライバ回路151に出力する。ドライバ回路151は、フォーカス駆動信号FODに応じて対物レンズ43をフォーカス方向へ駆動する。なお、上記フォーカスサーボ系は、公知または周知の技術を適用すればよいので、本実施形態では詳述しない。
【0029】
回転サーボ系は、回転制御部160がスピンドルモータ2の回転ドライバ167から回転速度(検出周波数=FG信号)を入力して、システムコントローラ101が指令した目標周波数(目標回転速度)となるように回転速度信号SPDを補正する。回転制御部160が出力する回転速度信号SPDは、スピンドルモータ2を駆動する回転ドライバ167へ入力される。
【0030】
また、制御部10は、光ディスク3が挿入されて第1回目の読み出しを行う際には、トラッキングサーボ系を作動させた状態で、光ディスク3の偏重心の検出処理を行う。このため、制御部10のDSP部100は、レジスタ116からレンズエラー信号を読み込んで、レンズエラー信号のレベルから光ディスク3の偏重心の検出を行う偏重心検出処理部161を有する。
【0031】
偏重心検出処理部161は、レンズエラー信号のレベルから光ディスク3の偏重心を検出すると、回転制御部160に対して読み込み時の回転速度を制限するよう、目標回転速度に対応する目標周波数を制限する。
【0032】
ここで、回転制御部160は、光ディスク3の目標回転速度に対応する目標周波数を格納する目標周波数格納部162と、回転ドライバ167のFG信号から光ディスク3の回転速度に対応する周波数を検出する周波数検出部163と、目標周波数と検出された周波数の差分を演算し、第2のレジスタ(Reg2)165に格納する加算器164と、第2のレジスタ165に格納された目標周波数とFG信号からの周波数の差分に基づいて回転速度(SPD)信号を演算し、回転ドライバ167へ出力する回転補償器166と、から構成される。
【0033】
図2は、本発明の偏重心検出処理の一例を示すフローチャートである。この処理は、上述のように、光ディスク3が挿入されて第1回目の読み出しを行う際に、DSP部100のシステムコントローラ101で実行されるである。なお、システムコントローラ101は、図2の処理を実行することで、回転制御部160および偏重心検出処理部161として機能する。
【0034】
まず、ステップS1では、DSP部100のシステムコントローラ101は、目標回転速度を所定の低速度であるV1に設定し、目標周波数格納部162へ設定する。所定の低速度V1は、例えば、光ディスク3がDVDの場合、4倍速などに設定される。所定の低速度V1は、光ディスク3の種類に応じて適宜設定することができる。
【0035】
ステップS2では、システムコントローラ101が、トラッキングサーボ系を作動(ON)させる。トラック補償器120は、トラッキングエラー信号に基づいてシステムコントローラ101が指令したトラックを保持するようにトラッキングドライバ信号TRDを補正する。なお、フォーカスサーボ系はこの時点で作動しており、DSP部100は光ディスク3の記録面から情報を読み出して、図示しないインターフェースから外部へ送信することができる。
【0036】
次に、ステップS3では、システムコントローラ101が、回転ドライバ167からスピンドルモータ2の回転周波数(FG)信号を読み込んで、現在の光ディスク3の回転速度が、所定の低速度V1に対応する目標周波数に達するまで待機する。
【0037】
次に、ステップS4では、システムコントローラ101が、レジスタ(Reg1)116からレンズエラー(LE)信号を読み込む。
【0038】
ステップS5では、システムコントローラ101が、ステップS4で読み込んだレンズエラー信号の振幅の平均値を演算し、変数aに格納する。
【0039】
そして、ステップS6では、光ディスク3の回転周期が所定の周期となるまで、ステップS4、S5でレンズエラー信号の読み込みと平均値の演算を繰り返す。この所定の周期は、光ディスク3が1回転以上の値に設定すればよい。なお、所定の周期は、例えば、光ディスク3が数回転以上となる値に設定するのが望ましい。
【0040】
光ディスク3の回転数が所定の周期に達すると、ステップS7に進む。この時点で、変数aには、所定の低速度V1で光ディスク3を所定の回転数(周期)まで回転させたときのレンズエラー信号の振幅の平均値が格納される。
【0041】
次にステップS7では、システムコントローラ101は、目標回転速度を所定の低速度V1を超える所定の高速度であるV2に設定し、所定の高速度に対応する周波数を目標周波数格納部162へ設定する。所定の高速度V2は、例えば、光ディスク3がDVDの場合、8倍速などに設定される。所定の高速度V2は、光ディスク3の種類に応じて適宜設定することができ、光ディスク3の種類毎に、読み出しに用いる常用速度などに設定される。
【0042】
ステップS8では、システムコントローラ101が、回転ドライバ167からスピンドルモータ2の回転周波数(FG)信号を読み込んで、現在の光ディスク3の回転速度が、所定の高速度V2に対応する目標周波数に達するまで待機する。
【0043】
ステップS9では、システムコントローラ101が、レジスタ(Reg1)116からレンズエラー信号を読み込む。
【0044】
ステップS10では、システムコントローラ101が、ステップS9で読み込んだレンズエラー信号の振幅の平均値を演算し、変数bに格納する。この結果、変数bには、所定の高速度V2で光ディスク3を回転させたときのレンズエラー信号の振幅の平均値が格納される。
【0045】
そして、ステップS11では、光ディスク3の回転周期が所定の周期となるまで、ステップS9、S10でレンズエラー信号の読み込みと平均値の演算を繰り返す。光ディスク3の回転数が所定の周期に達すると、ステップS12に進む。この時点で、変数bには、所定の高速速度V2で光ディスク3を所定の回転数(周期)まで回転させたときのレンズエラー信号の振幅の平均値が格納される。
【0046】
ステップS12では、システムコントローラ101が、ステップS5とステップS10で求めた変数a、bの差分Xを、
X=(b−a)
として演算する。差分Xには、光ディスク3の回転速度が高速度V2のときに測定したレンズエラー信号の振幅(平均値)と、低速度V1のときに測定したレンズエラー信号の振幅(平均値)の差分が、光ディスク3の偏重心による対物レンズ43の変位量として設定される。なお、対物レンズ43の変位量は、光ディスク3の径方向への変位量である。
【0047】
ステップS13では、システムコントローラ101が、差分Xが所定の基準値Thを超えているか否かを判定する。差分Xが基準値Thを超えている場合、システムコントローラ101は、光ディスク3に偏重心があると判定してステップS14へ進む。この偏重心がある場合、光ディスク3を高速度V2で回転させると、光ディスク装置に振動に伴う騒音が発生する恐れがあるため、ステップS14以降では読み込みを行う光ディスク3の回転速度を規制する。
【0048】
一方、差分Xが基準値Th以下のる場合、システムコントローラ101は、光ディスク3に偏重心がない、あるいは偏重心による対物レンズ43の変位量が無視できる範囲であると判定して処理を終了する。この結果、読み込みを行う光ディスク3の回転速度は高速度V2を維持することになる。
【0049】
偏重心による対物レンズ43の変位量が基準値Thを超えたステップS14では、システムコントローラ101は、光ディスク3の目標回転速度を高速度V2から所定値または所定の比率で低下させる。例えば、段階的に2倍速づつ低下させる場合、現在の光ディスク3の回転速度が高速度V2(8倍速)のときには、低減量を「−2倍速」として「6倍速」を新たな回転速度とする。システムコントローラ101は、新たな目標回転速度に対応する周波数を目標周波数格納部162へ設定する。
【0050】
そして、ステップS15では、システムコントローラ101が、新たな目標回転速度が所定の低速度V1(4倍速)であるか否かを判定する。システムコントローラ101は、目標回転速度が所定の低速度V1(4倍速)であれば、そのまま処理を終了して、低速度V1で読み込み行う。一方、システムコントローラ101は、目標回転速度が所定の低速度V1でなければ、ステップS9に戻って、新たな目標回転速度でレンズエラー信号を測定し、差分Xと基準値Thとの比較を行う。
【0051】
以上のように、本発明では、トラッキングサーボ系を作動させた状態で、所定の低速度V1と所定の高速度V2でレンズエラー信号の振幅を測定することで偏重心の検出処理を行い、偏重心の検出が完了する以前から光ディスク3の読み出しを可能にし、光ディスク装置に接続された装置でタイムアウトが発生するのを防止することができるのである。
【0052】
さらに、所定の高速度V2で、差分Xが基準値Thを超えた場合には、光ディスク3の回転速度を段階的に低減することで、偏重心のある光ディスク3を可能な限り高い速度で回転させて読み込みを実施することができる。
【0053】
図3は、偏重心量が少ない光ディスク3の対物レンズ43の変位量(レンズエラー信号の振幅)と光ディスク3の回転位置と時間の関係を示すグラフである。なお、図中、+側が光ディスク3の外周側、−側が光ディスク3の内周側とする。図3において、時刻T0では光ディスク3の回転速度が所定の低速度V1に到達した刻T0からレンズエラー信号(対物レンズの変位量)の測定が開始される。制御部10は、T0〜T3までの所定の周期まで低速度V1でレンズエラー信号を測定し、対物レンズ43の変位量の平均値を演算して変数aに格納する。
【0054】
さらに、図中、時刻T10では光ディスク3の回転速度が所定の高速度V2になってからレンズエラー信号(対物レンズの変位量)の測定が開始される。制御部10は、光ディスク3の回転速度が所定の高速度V2に達すると、T10〜T13までの所定の周期まで測定し、レンズ変位量の平均値を演算して変数bに格納する。
【0055】
図3の例では、光ディスク3の偏重心量が小さいので、高速度V2でも低速度V1でも振幅は小さい。このため、b−aの差分Xが基準値Th以下となって、目標周波数格納部162には高速度V2に対応した値が保持される。
【0056】
図4は、偏重心量が多い光ディスク3のレンズの変位量(レンズエラー信号)と光ディスク3の回転位置と時間の関係を示すグラフである。図中、時刻T0では光ディスク3の回転速度が所定の低速度V1となった時刻T0からレンズエラー信号(レンズの変位量)の測定が開始される。制御部10は、T0〜T3までの所定の周期まで低速度V1でレンズエラー信号を測定し、レンズの変位量の平均値を演算して変数aに格納する。レンズの変位量は、図3に比して大きな値となる。
【0057】
さらに、図中、時刻T10では光ディスク3の回転速度が所定の高速度V2になってからレンズエラー信号(レンズの変位量)の測定が開始される。制御部10は、光ディスク3の回転速度が所定の高速度V2に達すると、T10〜T13までの所定の周期までレンズの変位量を測定し、レンズ変位量の平均値を演算して変数bに格納する。
【0058】
図4の例では、光ディスク3の偏重心量が大きいので、b−aの差分Xが基準値Thを超える。このため、システムコントローラ101は、目標回転速度を制限し、高速度V2から「−2倍速」だけ制限した「6倍速」の周波数に対応する周波数を目標周波数格納部162に設定する。システムコントローラ101は、この6倍速で、再び図2のステップS9からS13を実行し、差分Xが基準値Th以下であれば、この6倍速が読み出しに用いる回転速度となる。6倍速で測定した差分Xが基準値Thを超える場合には、さらに「−2倍速」だけ制限した「4倍速」を読み込みに用いる光ディスク3の回転速度とする。
【0059】
上記処理は、所定の低速度V1でレンズエラー信号を測定する低速信号処理部(S1〜S6)と、所定の高速度V2でレンズエラー信号を測定する高速信号処理部(S7〜S11)と、レンズエラー信号の振幅に基づいて偏重心の有無を判定する判定部(S12,S13)と、光ディスク3に偏重心が存在するときには光ディスク3の回転速度を制限する回転速度規制部(S14)から構成される。
【0060】
以上のように、本発明によれば、トラッキングサーボ系を作動させた状態で、レンズエラー信号(レンズの変位量)の振幅(振動)から偏重心の検出を行うことで、偏重心の検出が完了する以前から光ディスク3の読み出しが可能になって、光ディスク装置に接続された装置でタイムアウトが発生するのを防止することができる。さらに、所定の高速度V2で、差分Xが基準値Thを超えた場合には、光ディスク3の回転速度を徐々に低減することで、偏重心のある光ディスク3を可能な限り高い速度で回転させて読み込みを実施することができる。
【0061】
なお、上記実施形態において、レンズエラー信号は、対物レンズ43が光ディスク3の径方向へ変位する信号であれば良く、プッシュプルや位相差や3ビーム等の何れかを用いればよい。
【0062】
また、上記実施形態において、光ディスク3の回転速度の制限を行うか否かの判定を、低速度V1と高速度V2のレンズエラー信号の振幅の差分(b−a)で行う例を示したが、変数aと変数bの比(b/a)が所定の基準値Thrを超える場合に、回転速度の制限を行うようにしても良い。
【0063】
また、上記実施形態において、所定の低速度V1と高速度V2を維持してレンズエラー信号の振幅を行う例を示したが、図5で示すように、所定の低速度V2を目標回転速度として光ディスク3の回転速度を徐々に増大させ、所定の低速度V1に達してから所定の周期までレンズエラー信号の平均値を求めて変数aに格納する。その後、所定の高速度V2に達してから所定の周期までレンズエラー信号の平均値を求めて変数bに格納するようにしてもよい。つまり、回転速度の低速側では、所定の低速度V1の近傍でレンズエラー信号を測定するようにしてもよい。
【0064】
また、上記実施形態において、レンズエラー信号の振幅の平均値を用いる例を示したが、レンズエラー信号の振幅の最大値または最小値を用いて基準値と比較するようにしても良い。
【0065】
また、上記実施形態において、偏重心検出処理部161は、所定の低速度V1でのレンズエラー信号の振幅と、所定の高速度V2でのレンズエラー信号の振幅を比較する例を示したが、所定の高速度V2でのレンズエラー信号の振幅が基準値を超えたときに、光ディスク3に偏重心があると判定して、回転速度を制限してもよい。
【0066】
また、上記実施形態において、偏重心検出処理部161をDSP部100内に備えた例を示したが、偏重心検出処理部161は目標周波数格納部162にアクセスできればよいので、制御部10内の何れかに含まれればよい。
【0067】
また、上記実施形態において、システムコントローラ101は、各機能部のプログラムに従って動作することによって、所定の機能を実現する機能部として動作する。例えば、システムコントローラ101は、偏重心の検出処理プログラムに従って処理を行うことで偏重心検出処理部161として機能する。他のプログラムについても同様である。さらに、システムコントローラ101は、各プログラムが実行する複数の処理のそれぞれを実現する機能部としても動作する。
【符号の説明】
【0068】
3 光ディスク
43 対物レンズ
10 制御部
100 DSP部
101 システムコントローラ
120 トラック補償部
160 回転制御部
161 偏重心検出処理部
【特許請求の範囲】
【請求項1】
光ディスクにレーザからのビームを照射する対物レンズと、
前記対物レンズを駆動して前記光ディスクに照射するビームをトラック方向で移動させるアクチュエータと、
前記光ディスクから反射した前記ビームを検知し、検知信号として出力する光学センサと、
前記光学センサの検知信号から前記ビームのトラック方向のずれをトラックエラー信号として出力し、前記光学センサの検知信号から前記対物レンズのトラック方向の変位をレンズ変位信号として出力する信号生成部と、
前記トラックエラー信号を入力し、前記アクチュエータを駆動して前記ビームのトラッキングを制御するトラッキングサーボ制御部と、
モータに駆動された前記光ディスクの回転速度を制御する回転制御部と、
前記レンズ変位信号を入力として前記光ディスクの偏重心を検出する偏重心検出部と、を備えた光ディスク装置において、
前記回転制御部は、
前記光ディスクの目標回転速度を設定する目標回転速度格納部と、前記光ディスクの回転速度を検出する回転速度検出部と、前記検出された回転速度が目標回転速度となるように前記モータを制御し、
前記偏重心検出部は、
前記トラッキングサーボ制御部を機能させた状態で、前記回転制御部の目標回転速度格納部に所定の目標回転速度を設定して前記レンズ変位信号を読み込む信号処理部と、
前記レンズ変位信号の振幅に基づいて前記光ディスクの偏重心の有無を判定する判定部と、
前記光ディスクに偏重心が有ると判定された場合には、前記目標回転速度を制限する回転速度規制部と、
を備えたことを特徴とする光ディスク装置。
【請求項2】
請求項1に記載の光ディスク装置であって、
前記信号処理部は、
前記トラッキングサーボ制御部を機能させた状態で、前記回転制御部の目標回転速度格納部に第1の目標回転速度を設定して前記レンズ変位信号を読み込む低速信号処理部と、
前記トラッキングサーボ制御部を機能させた状態で、前記目標回転速度格納部に前記第1の目標回転速度を超える第2の目標回転速度を設定して前記レンズ変位信号を読み込む高速信号処理部と、を有し、
前記判定部は、
前記高速信号処理部のレンズ変位信号の振幅から前記低速信号処理部のレンズ変位信号の振幅を差し引いた差分を所定の基準値と比較して、前記差分が前記基準値を超えたときには前記光ディスクに偏重心が存在すると判定し、
前記回転速度規制部は、
前記光ディスクに偏重心が存在すると判定されたときには、前記第2の目標回転速度を低減することを特徴とする光ディスク装置。
【請求項3】
請求項2に記載の光ディスク装置であって、
前記回転速度規制部は、
前記第2の目標回転速度を段階的に低減することを特徴とする光ディスク装置。
【請求項4】
請求項3に記載の光ディスク装置であって、
前記高速信号処理部は、
前記トラッキングサーボ制御部を機能させた状態で、前記目標回転速度格納部に前記段階的に低減された第2の目標回転速度を設定して前記レンズ変位信号を読み込み、
前記判定部は、
前記高速信号処理部のレンズ変位信号の振幅から前記低速信号処理部のレンズ変位信号の振幅を差し引いた差分を所定の基準値と比較して、前記差分が前記基準値を超えたときには前記光ディスクに偏重心が存在すると判定し、
前記回転速度規制部は、
前記光ディスクに偏重心が存在すると判定されたときには、前記第2の目標回転速度をさらに低減することを特徴とする光ディスク装置。
【請求項5】
請求項1に記載の光ディスク装置であって、
前記レンズ変位信号は、
前記対物レンズのトラック方向の振動を示すレンズエラー信号であることを特徴とする光ディスク装置。
【請求項6】
請求項2に記載の光ディスク装置であって、
前記判定部は、
前記高速信号処理部のレンズ変位信号の振幅と、前記低速信号処理部のレンズ変位信号の振幅の比を、所定の基準値と比較して、前記比が前記基準値を超えたときには前記光ディスクに偏重心が存在すると判定することを特徴とする光ディスク装置。
【請求項7】
光ディスクにレーザからのビームを照射する対物レンズと、前記対物レンズを駆動して前記光ディスクに照射するビームをトラック方向で移動させるアクチュエータと、前記光ディスクから反射した前記ビームを検知し、検知信号として出力する光学センサと、前記光学センサの検知信号から前記ビームのトラック方向のずれをトラックエラー信号として出力し、前記光学センサの検知信号から前記対物レンズのトラック方向の変位をレンズ変位信号として出力する信号生成部と、前記トラックエラー信号を入力し、前記アクチュエータを駆動して前記ビームのトラッキングを制御するトラッキングサーボ制御部と、モータに駆動された前記光ディスクの回転速度を制御する回転制御部と、前記レンズ変位信号を入力として前記光ディスクの偏重心を検出する偏重心検出部と、を備えた光ディスク装置の制御方法であって、
前記回転制御部が、前記光ディスクの目標回転速度を設定し、前記光ディスクの回転速度を検出し、前記検出された回転速度が目標回転速度となるように前記モータを制御する第1のステップと、
前記偏重心検出部が、前記トラッキングサーボ制御部を機能させる第2のステップと、
前記偏重心検出部が、前記レンズ変位信号を読み込む第3のステップと、
前記偏重心検出部が、前記レンズ変位信号の振幅に基づいて前記光ディスクの偏重心の有無を判定する第4のステップと、
前記光ディスクに偏重心が有ると判定された場合には、前記目標回転速度を制限する第5のステップと、
を含むことを特徴とする光ディスク装置の制御方法。
【請求項8】
請求項7に記載の光ディスク装置の制御方法であって、
前記第3のステップは、
前記トラッキングサーボ制御部を機能させた状態で、前記回転制御部の目標回転速度格納部に第1の目標回転速度を設定して、前記レンズ変位信号を第1のレンズ変位信号として読み込む第6のステップと、
前記トラッキングサーボ制御部を機能させた状態で、前記目標回転速度格納部に前記第1の目標回転速度を超える第2の目標回転速度を設定して、前記レンズ変位信号を第2のレンズ変位信号として読み込む第7のステップと、を含み、
前記第4のステップは、
前記第1のレンズ変位信号の振幅から前記第2のレンズ変位信号の振幅を差し引いた差分を所定の基準値と比較して、前記差分が前記基準値を超えたときには前記光ディスクに偏重心が存在すると判定し、
前記第5のステップは、
前記光ディスクに偏重心が存在すると判定されたときには、前記第2の目標回転速度を低減することを特徴とする光ディスク装置の制御方法。
【請求項9】
請求項8に記載の光ディスク装置の制御方法であって、
前記第5のステップは、
前記第2の目標回転速度を段階的に低減することを特徴とする光ディスク装置の制御方法。
【請求項10】
請求項9に記載の光ディスク装置の制御方法であって、
前記第7のステップは、
前記トラッキングサーボ制御部を機能させた状態で、前記目標回転速度格納部に前記段階的に低減された第2の目標回転速度を設定して前記レンズ変位信号を読み込み、
前記第4のステップは、
前記第1のレンズ変位信号の振幅から前記第2のレンズ変位信号の振幅を差し引いた差分を所定の基準値と比較して、前記差分が前記基準値を超えたときには前記光ディスクに偏重心が存在すると判定し、
前記第5のステップは、
前記光ディスクに偏重心が存在すると判定されたときには、前記第2の目標回転速度をさらに低減することを特徴とする光ディスク装置の制御方法。
【請求項11】
請求項7に記載の光ディスク装置の制御方法であって、
前記レンズ変位信号は、
前記対物レンズのトラック方向の振動を示すレンズエラー信号であることを特徴とする光ディスク装置の制御方法。
【請求項12】
請求項8に記載の光ディスク装置の制御方法であって、
前記第4のステップは、
前記第1のレンズ変位信号の振幅と、前記第2のレンズ変位信号の振幅の比を、所定の基準値と比較して、前記比が前記基準値を超えたときには前記光ディスクに偏重心が存在すると判定することを特徴とする光ディスク装置の制御方法。
【請求項1】
光ディスクにレーザからのビームを照射する対物レンズと、
前記対物レンズを駆動して前記光ディスクに照射するビームをトラック方向で移動させるアクチュエータと、
前記光ディスクから反射した前記ビームを検知し、検知信号として出力する光学センサと、
前記光学センサの検知信号から前記ビームのトラック方向のずれをトラックエラー信号として出力し、前記光学センサの検知信号から前記対物レンズのトラック方向の変位をレンズ変位信号として出力する信号生成部と、
前記トラックエラー信号を入力し、前記アクチュエータを駆動して前記ビームのトラッキングを制御するトラッキングサーボ制御部と、
モータに駆動された前記光ディスクの回転速度を制御する回転制御部と、
前記レンズ変位信号を入力として前記光ディスクの偏重心を検出する偏重心検出部と、を備えた光ディスク装置において、
前記回転制御部は、
前記光ディスクの目標回転速度を設定する目標回転速度格納部と、前記光ディスクの回転速度を検出する回転速度検出部と、前記検出された回転速度が目標回転速度となるように前記モータを制御し、
前記偏重心検出部は、
前記トラッキングサーボ制御部を機能させた状態で、前記回転制御部の目標回転速度格納部に所定の目標回転速度を設定して前記レンズ変位信号を読み込む信号処理部と、
前記レンズ変位信号の振幅に基づいて前記光ディスクの偏重心の有無を判定する判定部と、
前記光ディスクに偏重心が有ると判定された場合には、前記目標回転速度を制限する回転速度規制部と、
を備えたことを特徴とする光ディスク装置。
【請求項2】
請求項1に記載の光ディスク装置であって、
前記信号処理部は、
前記トラッキングサーボ制御部を機能させた状態で、前記回転制御部の目標回転速度格納部に第1の目標回転速度を設定して前記レンズ変位信号を読み込む低速信号処理部と、
前記トラッキングサーボ制御部を機能させた状態で、前記目標回転速度格納部に前記第1の目標回転速度を超える第2の目標回転速度を設定して前記レンズ変位信号を読み込む高速信号処理部と、を有し、
前記判定部は、
前記高速信号処理部のレンズ変位信号の振幅から前記低速信号処理部のレンズ変位信号の振幅を差し引いた差分を所定の基準値と比較して、前記差分が前記基準値を超えたときには前記光ディスクに偏重心が存在すると判定し、
前記回転速度規制部は、
前記光ディスクに偏重心が存在すると判定されたときには、前記第2の目標回転速度を低減することを特徴とする光ディスク装置。
【請求項3】
請求項2に記載の光ディスク装置であって、
前記回転速度規制部は、
前記第2の目標回転速度を段階的に低減することを特徴とする光ディスク装置。
【請求項4】
請求項3に記載の光ディスク装置であって、
前記高速信号処理部は、
前記トラッキングサーボ制御部を機能させた状態で、前記目標回転速度格納部に前記段階的に低減された第2の目標回転速度を設定して前記レンズ変位信号を読み込み、
前記判定部は、
前記高速信号処理部のレンズ変位信号の振幅から前記低速信号処理部のレンズ変位信号の振幅を差し引いた差分を所定の基準値と比較して、前記差分が前記基準値を超えたときには前記光ディスクに偏重心が存在すると判定し、
前記回転速度規制部は、
前記光ディスクに偏重心が存在すると判定されたときには、前記第2の目標回転速度をさらに低減することを特徴とする光ディスク装置。
【請求項5】
請求項1に記載の光ディスク装置であって、
前記レンズ変位信号は、
前記対物レンズのトラック方向の振動を示すレンズエラー信号であることを特徴とする光ディスク装置。
【請求項6】
請求項2に記載の光ディスク装置であって、
前記判定部は、
前記高速信号処理部のレンズ変位信号の振幅と、前記低速信号処理部のレンズ変位信号の振幅の比を、所定の基準値と比較して、前記比が前記基準値を超えたときには前記光ディスクに偏重心が存在すると判定することを特徴とする光ディスク装置。
【請求項7】
光ディスクにレーザからのビームを照射する対物レンズと、前記対物レンズを駆動して前記光ディスクに照射するビームをトラック方向で移動させるアクチュエータと、前記光ディスクから反射した前記ビームを検知し、検知信号として出力する光学センサと、前記光学センサの検知信号から前記ビームのトラック方向のずれをトラックエラー信号として出力し、前記光学センサの検知信号から前記対物レンズのトラック方向の変位をレンズ変位信号として出力する信号生成部と、前記トラックエラー信号を入力し、前記アクチュエータを駆動して前記ビームのトラッキングを制御するトラッキングサーボ制御部と、モータに駆動された前記光ディスクの回転速度を制御する回転制御部と、前記レンズ変位信号を入力として前記光ディスクの偏重心を検出する偏重心検出部と、を備えた光ディスク装置の制御方法であって、
前記回転制御部が、前記光ディスクの目標回転速度を設定し、前記光ディスクの回転速度を検出し、前記検出された回転速度が目標回転速度となるように前記モータを制御する第1のステップと、
前記偏重心検出部が、前記トラッキングサーボ制御部を機能させる第2のステップと、
前記偏重心検出部が、前記レンズ変位信号を読み込む第3のステップと、
前記偏重心検出部が、前記レンズ変位信号の振幅に基づいて前記光ディスクの偏重心の有無を判定する第4のステップと、
前記光ディスクに偏重心が有ると判定された場合には、前記目標回転速度を制限する第5のステップと、
を含むことを特徴とする光ディスク装置の制御方法。
【請求項8】
請求項7に記載の光ディスク装置の制御方法であって、
前記第3のステップは、
前記トラッキングサーボ制御部を機能させた状態で、前記回転制御部の目標回転速度格納部に第1の目標回転速度を設定して、前記レンズ変位信号を第1のレンズ変位信号として読み込む第6のステップと、
前記トラッキングサーボ制御部を機能させた状態で、前記目標回転速度格納部に前記第1の目標回転速度を超える第2の目標回転速度を設定して、前記レンズ変位信号を第2のレンズ変位信号として読み込む第7のステップと、を含み、
前記第4のステップは、
前記第1のレンズ変位信号の振幅から前記第2のレンズ変位信号の振幅を差し引いた差分を所定の基準値と比較して、前記差分が前記基準値を超えたときには前記光ディスクに偏重心が存在すると判定し、
前記第5のステップは、
前記光ディスクに偏重心が存在すると判定されたときには、前記第2の目標回転速度を低減することを特徴とする光ディスク装置の制御方法。
【請求項9】
請求項8に記載の光ディスク装置の制御方法であって、
前記第5のステップは、
前記第2の目標回転速度を段階的に低減することを特徴とする光ディスク装置の制御方法。
【請求項10】
請求項9に記載の光ディスク装置の制御方法であって、
前記第7のステップは、
前記トラッキングサーボ制御部を機能させた状態で、前記目標回転速度格納部に前記段階的に低減された第2の目標回転速度を設定して前記レンズ変位信号を読み込み、
前記第4のステップは、
前記第1のレンズ変位信号の振幅から前記第2のレンズ変位信号の振幅を差し引いた差分を所定の基準値と比較して、前記差分が前記基準値を超えたときには前記光ディスクに偏重心が存在すると判定し、
前記第5のステップは、
前記光ディスクに偏重心が存在すると判定されたときには、前記第2の目標回転速度をさらに低減することを特徴とする光ディスク装置の制御方法。
【請求項11】
請求項7に記載の光ディスク装置の制御方法であって、
前記レンズ変位信号は、
前記対物レンズのトラック方向の振動を示すレンズエラー信号であることを特徴とする光ディスク装置の制御方法。
【請求項12】
請求項8に記載の光ディスク装置の制御方法であって、
前記第4のステップは、
前記第1のレンズ変位信号の振幅と、前記第2のレンズ変位信号の振幅の比を、所定の基準値と比較して、前記比が前記基準値を超えたときには前記光ディスクに偏重心が存在すると判定することを特徴とする光ディスク装置の制御方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−114703(P2013−114703A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−258323(P2011−258323)
【出願日】平成23年11月25日(2011.11.25)
【出願人】(501009849)株式会社日立エルジーデータストレージ (646)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【出願人】(501009849)株式会社日立エルジーデータストレージ (646)
【Fターム(参考)】
[ Back to top ]