
光ディスク装置
【課題】 光ディスク等の可換型ディスク装置では、ディスク個々の偏重心のバラツキが大きく、転送速度を大きくするために高速回転を行った場合、大きな振動や騒音を発生し、装置信頼性を著しく損なう。
【解決手段】 ディスク6の偏重心をプランジャ2を用いて偏重心補正用クランパ1を偏心させて補正し、かつ高速回転時に偏重心補正用クランパ1が補正位置を移動しないようにチャッキング力を可変できる機構を付加した偏重心補正機構を光ディスク装置に設ける。そのため、偏重心量の大きなディスクでも振動を発生させることなく高速で回転させることができ、データ転送速度の向上が図れる。偏重心量の大きなディスクを高速回転しても振動、騒音を押さえつつ補正量の経時変化が少ないため、高信頼性の偏重心補正機構およびこれを備えた光ディスク装置を実現できる。
【解決手段】 ディスク6の偏重心をプランジャ2を用いて偏重心補正用クランパ1を偏心させて補正し、かつ高速回転時に偏重心補正用クランパ1が補正位置を移動しないようにチャッキング力を可変できる機構を付加した偏重心補正機構を光ディスク装置に設ける。そのため、偏重心量の大きなディスクでも振動を発生させることなく高速で回転させることができ、データ転送速度の向上が図れる。偏重心量の大きなディスクを高速回転しても振動、騒音を押さえつつ補正量の経時変化が少ないため、高信頼性の偏重心補正機構およびこれを備えた光ディスク装置を実現できる。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】本発明は可換型媒体を用いる光ディスク装置に係り、特に、高速回転型CD−ROM装置またはDVD ROM/RAM装置に関する。
【0002】
【従来の技術】光ディスク装置は、スピンドルモータに直結したターンテーブル上にディスクをのせて、ターンテーブル内あるいはクランパ内に内蔵される永久磁石の磁気力でクランプし、回転させ、半導体レーザを用いたピックアップでデータの読みとりを行っている。光ディスク装置は、互換性のあるディスクを用いているため、そのディスクサイズおよび重量は規制されている。特に重量に関しては、14〜33gとかなり幅広く設定されている。
【0003】一方、光ディスク装置、特にCD−ROM装置は、データ転送速度を向上させる直接的な効果となっているディスク回転速度の向上が図られている。標準速度は200〜500回転(線速度一定のため)であるが、標準速度の12倍以上、すなわち6000rpm以上の回転数が実現されようとしている。従来の例としては、特開昭57−198584号公報、特開昭63−152056号公報、特開昭63−152057号公報、特開平3−46154号公報、特開昭3−237647号公報がある。
【0004】
【発明が解決しようとする課題】しかし、前述したように、ディスク重量の規格にかなり幅広く設定されているがゆえに、一般に配布されているディスクは、それ自体が持つ偏重心はかなり大きい。たとえば偏重心のないディスクに、ユーザが任意の情報を認識するためにラベルを貼付すると、それだけで数g・mmの偏重心が発生する。偏重心の最悪値は経験的に10g・mmで、このようなディスクを回転させると、当然ながら偏重心による振動が発生する。
【0005】8倍速程度なら最大回転数は約4000rpmなので、偏重心による振動はアクチュエータあるいはシャシに対して小さいものであり、さほど問題とはならない。しかし、それ以上の高速回転になると、ディスクの持つ偏重心により振動は急激に増大し、アクチュエータの追従性能マージン低下のためのエラーレート増加、さらにシャシが振動し、それを搭載するコンピュータ本体が共鳴するといった現象が発生し、コンピュータユーザに不快感を与えることになる。
【0006】上記課題を解決するために、本発明者らは、ディスクをチャッキングする偏重心補正用クランパを移動して、回転中心と偏重心を一致させ、ディスク回転時の振動低減機構を提案した。10gr・mmの偏重心量を補正するためには、偏重心補正用クランパの偏心可能量が、数100μmであることを考慮すると、偏重心補正用クランパ重量は100gr必要である。しかし、6000rpm以上の高速回転となると、偏重心補正用クランパは、遠心力で偏重心補正位置に静止できず、ディスク上を移動してしまう問題がクローズアップされてくる。
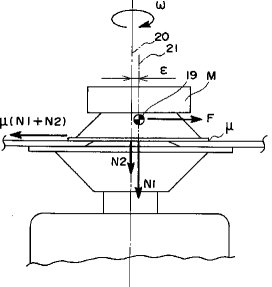
【0007】図12は、ディスク、偏重心補正用クランパに作用する力を説明する図である。偏重心補正用クランパは回転中心からεずれ、ディスク偏重心をm・εで補正する。一方、偏重心補正用クランパをディスク上に静止させている力は、チャッキング力N1と偏重心補正用クランパ重量N2の和と、両者の間の最大静止摩擦係数の積であり、この力が偏重心補正用クランパにかかる遠心力F=mεω2(ω:回転数)に勝っている限り、偏重心補正用クランパは暴れることなくディスクの偏重心量を補正できることとなる。
【0008】偏重心補正用クランパをディスクに静止させることができる力は不変であるが、偏重心補正用クランパにかかる遠心力は、回転数の2乗に比例して増大することを考慮すると、N1+N2<mεω2/μ となったとき、偏重心補正用クランパはディスク上に静止不可能な状態となってしまう。たとえば、重量が30gの偏重心補正用クランパが、回転中心より200μmずれた状態で偏重心を補正できたとし、この状態でディスクが6000rpmで回転すると、遠心力は2.4Nとなる。
【0009】一方、チャッキング力が250g、偏重心補正用クランパとディスク間の摩擦係数を0.4とすると、偏重心補正用クランパをディスク上に静止させることができる力は1.1Nである。これらを比較すると、明らかに遠心力が偏重心補正用クランパを静止させることができる力を上回っている。このような状況では、偏重心補正用クランパは、ディスク上の補正位置から遠心力で動かされ、振動を大きくしてしまう。
【0010】チャッキング力を可変にする従来技術では、いずれもその機構は外部より力を加えるものであり、スピンドルモータのスラスト軸受けの予圧を変えることになり、その軸受けの寿命を著しく損なう恐れがある。以上のような状態を回避するためには、偏重心補正用クランパのディスクチャッキング力を増大させることが必須課題となる。
【0011】本発明の目的は、上記問題点を回避しつつ、偏重心を補正する機構に、偏重心補正用クランパのディスクチャッキング力を増大させる機構を付加し、信頼性を損なうことなく、ディスクの回転による振動を減少させながら、ディスクの高速回転化を実現し、データ転送速度が向上する光ディスク装置を提供することである。
【0012】
【課題を解決するための手段】本発明は、上記課題を以下のように解決した。すなわち、ディスクを支持するターンテーブルと、前記ディスクをターンテーブルに押し付けるクランパとを備え、前記ターンテーブルまたはクランパのいずれか一方に磁石を内蔵し、いずれか他方に鉄部材を内蔵する光ディスク装置において、前記磁石または鉄部材のうち、少なくともいずれか一方が、ディスク回転軸の半径方向に複数個に分割され、かつ、回転軸方向に弾性部材により移動可能に支持されるとともに、前記移動可能な磁石または鉄部材を内蔵するターンテーブルまたはクランパは、前記ディスク面に向かって拡径した形状であることを特徴とし、ディスク回転速度の増大時には、鉄部材と磁石が接近することによって、クランプ力を増大させるようにした。
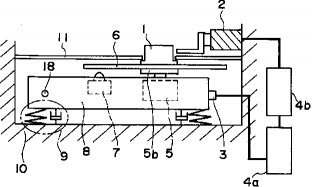
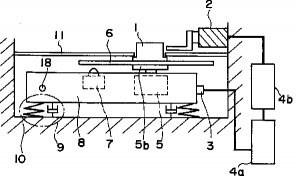
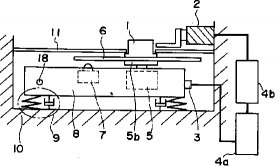
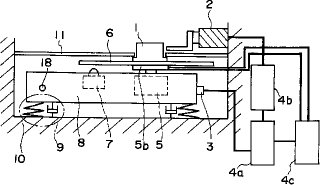
【0013】以下、まず、本発明の構成を、図1を参照して具体的に説明する。スピンドル構造体8はディスク6を回転させるスピンドルモータ5とディスク6のデータを読み出すピックアップアクチュエータ7と一体構造となっており、外部に伝達される振動を絶縁するために、ベース構造体10とダンピングをもった支持脚9で支持されている。また支点18を中心にスピンドル構造体8は回転可能に支持されているのでターンテーブル5bは上下動することができる。この動きを用いてディスク6の装置内への出し入れを行い、さらに偏重心補正用クランパ1とターンテーブル5bとでディスク6をチャッキングする。スピンドル構造体8の面内あるいは面外方向にディスク6の持つ偏重心が発生する振動を測定するセンサ3が取りつけられている。この振動センサ3の取付位置はアクチュエータ2の移動方向と同方向が望ましい。振動センサ3の測定する物理量は変位、速度、加速度あるいは力のいずれかが選択される。補正機構系は偏重心補正用クランパ1と、それを移動させるアクチュエータ2と、振動センサ3で測定した信号を変換し、その値とあらかじめ設定されている基準値と比較しかつ制御を行う制御回路4aとで構成されている。
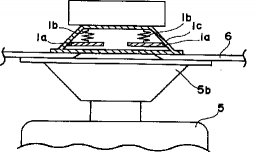
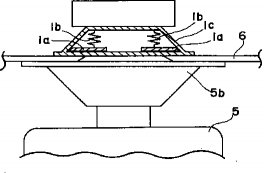
【0014】偏重心補正用クランパ5b内のターンテーブル5bに内蔵される磁石の磁気力を受ける鉄板1aは、回転軸断面において偏重心補正用クランパ筐体1とは弾性部材1bで結合され、回転面内方向において回転中心対称に複数分割されており、偏重心補正用クランパ内部1cの形状は円錐台形状とする。鉄板1aはディスク低速回転時すなわち補正時には、図2に示すように弾性部材1bによってターンテーブル5b内の磁石から遠ざかる位置にある。したがってチャッキング力は弱い状態にあるので、プランジャ2は容易に偏重心補正用クランパ1を打撃により移動させることができる。また、データ読み取り時にはディスク6は高速回転するので、鉄板1aは強い遠心力を受ける。偏重心補正用クランパ1と鉄板1aの摺動面1cの回転面内断面は磁石方向に面積が広がっているので、図3に示すように鉄板1aは磁石に近づく方向に移動する。磁力は距離の2乗に反比例するのでチャッキング力は強まり、偏重心補正用クランパ1はディスク7上を遠心力によって移動することはない。
【0015】偏重心補正用クランパ1はディスク6の偏重心を補正するために、移動可能距離と重量の積はディスク6の偏重心の最悪値と同等以上のアンバランス量となるように設定される。例えば、ディスク7の偏重心量が10gr・mm、偏重心補正用クランパ1の移動可能距離が300μmである場合は偏重心補正用クランパ重量は33gr以上あることが望ましい。偏重心補正用アクチュエータ2はプランジャ、ソレノイド等で構成されており、偏重心補正用クランパ1に撃力を与えることができる。
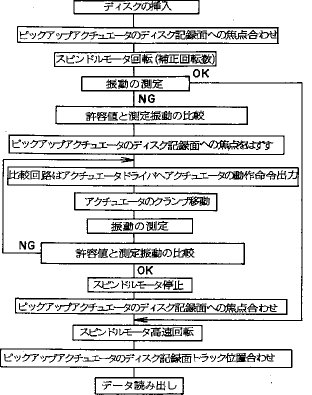
【0016】次に、本発明の解決手段を実際の装置の動作に従い、図1〜3、10、11を参照して説明する。光ディスク装置のディスクトレイに置かれたディスク6はユーザの指示により装置内にローディングされ、スピンドルモータ5と直結されているターンテーブル5b上に設置される。その後、ディスク6をターンテーブル5bと直結するためにディスク6を載せたスピンドル構造体8はクランパ1とターンテーブル5bでディスク6をターンテーブル5b内に内蔵された磁石の磁気力で挟み込みチャッキングする。次にディスク6はスピンドルモータ5により回転される。この時点でピックアップアクチュエータ7の状態はディスクデータ面に焦点を合わせておらず、稼働していない状態とする。このときディスク6が偏重心を持っていれば、回転することにより振動が発生するので、その振動をスピンドル構造体8内に内蔵する振動センサ3により測定する。
【0017】測定する振動は変位、速度、加速度あるいは力のいずれでもよい。例えば、変位振動を測定する場合には光プローブあるいは静電センサ等が使用される。速度信号を測定する場合にはソレノイドあるいはピックアップアクチュエータに内蔵されるピックアップ駆動コイル等が使用される。加速度信号を測定する場合には加速度ピックアップあるいは半導体プロセスにより形成された片持ち梁等が使用される。力信号を測定する場合にはロードセル等が使用される。測定した信号は偏重心補正回路4aに於いてあらかじめ設定されている振動の許容値と比較される。このとき、偏重心からの振動が許容値内の時は偏重心補正回路4aはアクチュエータドライバ4bには補正信号を出力せず直ちにスピンドルモータ5は高速回転を始め、データの転送を行う。
【0018】一方、振動測定時に許容値を越えたときには、偏重心補正回路4aは補正信号をアクチュエータドライバ4bに出力して偏重心補正用クランパ部1を偏重心補正用アクチュエータ2により回転中心からディスク6の持つ偏重心方向とは逆方向に移動させる。アクチュエータ2の動作タイミングはスピンドル5からの回転インデックスと測定した振動を比較し、かつアクチュエータ2が偏重心補正用クランパ1と接触するまでの時間を加味して決定される。このとき、一度の動作で偏重心が発生する振動が許容値内に収まらないときには複数回に分けて補正動作を行ってもよい。このようにして、偏重心が発生する振動が許容値に収まれば、スピンドルモータ5は高速回転を始め、データの転送を行う。
【0019】以上の補正により偏重心による振動が低減され高速回転時に耐えうるチャッキング力を得られるので、読みとり誤差を低減することができ、さらにコンピュータ内のほかの構成部品に悪影響を与えることなく、偏重心量の大きなディスクに対しても高速回転、すなわち高データ転送が可能でかつ高信頼性の光ディスク装置を構成することができる。
【0020】
【発明の実施の形態】以下、本発明の実施の形態を、図面を参照して説明する。図1〜3、10、11は、本発明の第1の実施形態を説明する図である。まず、本発明の構成を、図1〜3を用いて説明する。スピンドル構造体8はディスク6と、偏重心補正用クランパ1と、これを磁力によって吸引する磁石を内蔵したターンテーブル5bを持ち、ディスク6を自転駆動するスピンドルモータ5と、ディスク6のデータを読み出すピックアップアクチュエータ7からなり、外部振動を絶縁するために、ベース構造体10上にダンピングをもった支持脚9で支持されている。振動センサ3は、スピンドル構造体8に取り付けられ、ディスク6の持つ偏重心が発生する振動を測定する。この振動センサ3は、プランジャ2の移動方向と同方向に設置されるのが望ましいが、不可能なときはその限りではない。
【0021】補正機構の主な系は、ベース構造体10に固定されたクランパホルダ11に支持され、回転可能で、ターンテーブル5a内の磁石の磁力を受ける鉄板1aを内蔵した偏重心補正用クランパ1と、それを撃力を用いて移動させるプランジャ2と、振動センサ1で測定した信号を比較判断する回路4a、およびプランジャ2を動作させるドライバ4bとで構成されている。偏重心補正用クランパ5b内のターンテーブル5bに内蔵される磁石の磁気力を受ける鉄板1aは、回転軸断面において偏重心補正用クランパ筐体1とは弾性部材1bで結合され、回転面内方向において回転中心対称に複数分割されており、偏重心補正用クランパ1の内部の形状は円錐台形状とする。
【0022】鉄板1aはディスク低速回転時、すなわち補正時には、図2に示すように弾性部材4bによって、ターンテーブル5b内の磁石から遠ざかる位置にある。したがって、チャッキング力は弱い状態にあるので、プランジャ2は、容易に偏重心補正用クランパ1を打撃により移動させることができる。また、データ読み取り時にはディスク6は高速回転するので、鉄板1aは強い遠心力を受ける。偏重心補正用クランパ1と鉄板1aの摺動面1cの回転面内断面は、磁石方向に面積が広がっているので、図3に示すように、鉄板1aは磁石に近づく方向に移動する。したがって、チャッキング力は強まるので、偏重心補正用クランパ1は、ディスク6上を遠心力によって移動することはない。
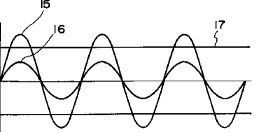
【0023】以下に、本実施形態の補正動作を、図1、10、11を用いて説明する。光ディスク装置にディスク6をローディングした後、ディスク6は偏重心補正用クランパ1によってチャッキングされる。その後、ディスク6を回転させ、ディスク6の偏重心による振動を振動センサ3で測定する。なお、このときの回転数は、偏重心補正用アクチュエータ2の時定数の大きさで決定し、低速回転とする。このことで、チャッキング力は補正に適した力となる。偏重心補正回路4aは測定した値とあらかじめ設定されている基準値17と比較する。このときに、図10のように、振動レベルが基準値17以下の波形16であれば、即ディスク回転数を高速化してデータを読み出す。このときは、既に偏重心補正用クランパ1内の鉄板1aは、磁石に近づいているので、高速回転に適したチャッキング力となっている。基準値17は、少なくともディスク高速回転時にデータをピックアップアクチュエータ7が十分読み出しできる振動レベルである。
【0024】一方、図10の振動レベルが基準値を満たさない波形15の場合、偏重心補正回路4aは、アクチュエータドライバ4bに動作命令を出力して、偏重心補正用アクチュエータ2を動作させ、偏重心補正用クランパ1を測定した振動方向とは逆方向に移動させる。その後、再度振動の測定を行い、偏重心補正回路4aで基準値17以下であることを確認した後、ディスク回転数を高速化して、データを読み出す。偏重心補正ルーチンは複数回に分けて実行してもよい。
【0025】以上の機構は簡便な構造で、偏重心補正用クランパを回転遠心力で移動させることはないので、高回転時に安定してディスク偏重心を補正できる。したがって、データ転送速度を向上することができると同時に、信頼性の高い偏重心補正機構とそれを備えた光ディスク装置を得ることができる。
【0026】図4〜7、10、11は、本発明の第2の実施形態を説明する図である。まず、本実施形態の構成を、図4〜7を用いて説明する。スピンドル構造体8は移動可能な磁石5cを内蔵したターンテーブル5eと、偏重心補正用クランパ1と、磁石5cの磁力を用いてディスク6をクランプし回転させるスピンドルモータ5と、ディスク6のデータを読み出すピックアップアクチュエータ7とよりなり、外部振動を絶縁するために、ベース構造体10上にダンピングをもった支持脚9で支持されている。振動センサ3はスピンドル構造体8に取り付けられ、ディスク6の持つ偏重心が発生する振動を測定する。この振動センサ3はアクチュエータ2の移動方向と同方向に設置されるのが望ましいが、不可能なときはその限りではない。
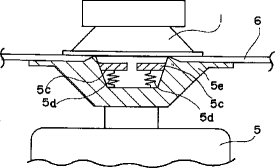
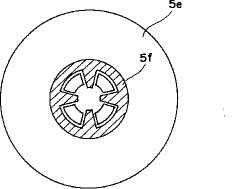
【0027】補正機構の主な系は、ベース構造体10に固定されたクランパホルダ11に支持され、回転可能な偏重心補正用クランパ1と、それを撃力を用いて移動させるプランジャ2と、振動センサ3で測定した信号を比較判断する回路4a、およびプランジャ2を動作させるドライバ4bとで構成されている。ターンテーブル5e内に内蔵される磁気力を発生する磁石5cは、回転軸断面においてターンテーブル5e上部とは弾性部材5dで結合され、回転面内方向において回転中心対称に複数分割され、ターンテーブル5e内部形状は円錐台形状とし、リブ5fが設けられて、凹部に磁石5cが入っている。
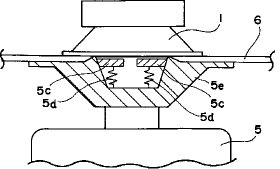
【0028】磁石5cはディスク低速回転時、すなわち補正時には、図5に示すように、弾性部材5dによって偏重心補正用クランパ1内の鉄板から遠ざかる位置にある。したがって、チャッキング力は弱い状態にあるので、プランジャ2は、容易に偏重心補正用クランパ1を、打撃により移動させることができる。また、データ読み取り時には、ディスク6は高速回転するので、磁石5cは強い遠心力を受ける。ターンテーブル5eと磁石5cの摺動面の回転面内断面は、偏重心補正用クランパ1方向に面積が広がっているので、図7に示すように、磁石5cは鉄板に近づく方向に移動する。したがって、チャッキング力は強まるので、偏重心補正用クランパ1は、ディスク6上を遠心力によって移動することはない。
【0029】以下、本実施形態の補正動作を図4、10、11を用いて説明する。光ディスク装置にディスク6をローディングした後、ディスク6は偏重心補正用クランパ1によってチャッキングされる。その後、ディスク6を回転させディスク6の偏重心による振動を振動センサ3で測定する。なお、このときの回転数は偏重心補正用アクチュエータ2の時定数の大きさで決定し、低速回転とする。このことで、チャッキング力は補正に適した力となる。偏重心補正回路4aは、測定した値とあらかじめ設定されている基準値17と比較する。このときに、図10の振動レベルが基準値17以下の波形16であれば、即ディスク回転数を高速化してデータを読み出す。このときは、既にターンテーブル5e内の磁石5cは、偏重心補正用クランパ1の鉄板に近づいているので、高速回転に適したチャッキング力となっている。基準値17は、少なくともディスク高速回転時に、データをピックアップアクチュエータ7が十分読み出しできる振動レベルである。
【0030】一方、図10の振動レベルが基準値を満たさない波形15の場合、偏重心補正回路4aは、アクチュエータドライバ4bに動作命令を出力して、偏重心補正用アクチュエータ2を動作させ、偏重心補正用クランパ1を測定した振動方向とは逆方向に移動させる。その後、再度振動の測定を行い、偏重心補正回路4aで基準値17以下であることを確認した後、ディスク回転数を高速化してデータを読み出す。偏重心補正ルーチンは複数回に分けて実行してもよい。
【0031】以上の機構は、回転中心が決まっているターンテーブル内を、磁石が移動してチャッキング力を大きくするので、高速回転時のチャッキング力のバラツキを少なくできる。したがって、高回転時に安定してディスク偏重心を補正することができ、データ転送速度を向上することができると同時に、信頼性の高い偏重心補正機構と、それを備えた光ディスク装置を得ることができる。
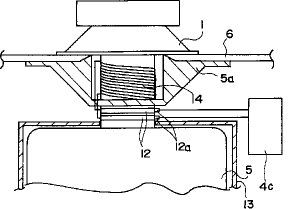
【0032】図8〜11は、本発明の第3の実施形態を説明する図である。ひしまず、本発明の構成を、図8、9を用いて説明する。スピンドル構造体8はディスク6と、偏重心補正用クランパ1と、これを磁力によって吸引する電磁石14を内蔵したターンテーブル5aを持ち、ディスク6を自転駆動するスピンドルモータ5とディスク6のデータを読み出すピックアップアクチュエータ7とからなり、外部振動を絶縁するために、ベース構造体10上にダンピングをもった支持脚9で支持されている。振動センサ3はスピンドル構造体8に取り付けられ、ディスク6の持つ偏重心が発生する振動を測定する。この振動センサ3はアクチュエータ2の移動方向と同方向に設置されるのが望ましいが、不可能なときはその限りではない。
【0033】補正機構の主な系は、ベース構造体10に固定されたクランパホルダ11に支持され、回転可能な偏重心補正用クランパ1を、撃力を用いて移動させるプランジャ2と、モータ5への電磁石14の磁気漏洩を防ぐ磁気シールド板13と、ドライバ4cと電磁石14を電気的に接続し、電力を供給するためのブラシ12aおよびスリップリング12と、振動センサ3で測定した信号を比較判断して、制御を行う偏重心補正回路4aおよびプランジャ2を動作させるドライバ4bおよび電磁石14を駆動するドライバ4cとで構成されている。
【0034】電磁石14は磁力を用いて、偏重心補正用クランパ1をターンテーブル5a側に引き寄せ、ディスク6をチャッキングするものであり、偏重心補正時には、プランジャ2が偏重心補正用クランパ1を容易に移動させることができるように、チャッキング力を小さく、データ読み取り時には高速回転するので、偏重心補正用クランパ1が遠心力によってディスク6上を移動してしまわないように、チャッキング力を大きくする制御を行う。
【0035】以下、本実施形態の偏重心補正動作を図8R>8、10、11を用いて説明する。光ディスク装置にディスク6をローディングした後、ターンテーブル5a内に内蔵された電磁石14は、プランジャ2で偏重心補正用クランパ1を移動できる磁力をドライバ4cによって発生し、ディスク6をチャッキングする。その後、ディスク6を回転させ、ディスク6の偏重心による振動を振動センサ3で測定する。なお、このときの回転数は、偏重心補正用アクチュエータ2の時定数の大きさで決定される。偏重心補正回路4aは、測定した値とあらかじめ設定されている基準値17とを比較する。このときに、図10の振動レベルが基準値17以下の波形16であれば、即座に電磁石14は磁力を大きくして、チャッキング力を増し、ディスク回転数を高速化してデータを読み出す。基準値17は、少なくともディスク高速回転時に、データをピックアップアクチュエータ7が十分読み出しできる振動レベルである。
【0036】一方、図10の振動レベルが基準値を満たさない波形15の場合、偏重心補正回路4aはアクチュエータドライバ4bに動作命令を出力して、偏重心補正用アクチュエータ2を動作させ、偏重心補正用クランパ1を測定した振動方向とは逆方向に移動させる。その後、再度振動の測定を行い、偏重心補正回路4aで基準値17以下であることを確認した後、電磁石14は磁力を大きくしてチャッキング力を増し、ディスク回転数を高速化してデータを読み出す。偏重心補正ルーチンは複数回に分けて実行してもよい。
【0037】以上の機構で、偏重心補正用クランパはディスク上を遠心力で移動することはなく、チャッキング力制御機構がターンテーブル内にあるので、高回転時に安定してディスク偏重心を補正することができ、データ転送速度を向上することができると同時に、信頼性が高く、コンパクトな偏重心補正機構と、それを備えた光ディスク装置を得ることができる。
【0038】
【発明の効果】上述のとおり本発明によれば、ディスクチャッキング力を制御できる機能を付加し、ディスクの偏重心を補正する機構を、光ディスク装置に搭載することにより、安定に偏重心補正を行うことができ、高速回転が可能となる。これにより、データの高速転送化および偏重心補正効果の信頼性向上を実現できる。また、高速あるいは高密度光ディスク装置を提供できる。
【図面の簡単な説明】
【図1】本発明の第1実施形態を説明する図である。
【図2】本発明の第1実施形態において、ディスク低速回転時の動作を説明する図である。
【図3】本発明の第1実施形態において、ディスク高速回転時の動作を説明する図である。
【図4】本発明の第2実施形態を説明する図である。
【図5】本発明の第2実施形態において、ディスク低速回転時の動作を説明する図である。
【図6】本発明の第2実施形態の回転面内断面を説明する図である。
【図7】本発明の第2実施形態において、ディスク高速回転時の動作を説明する図である。
【図8】本発明の第3実施形態の構成を説明する図である。
【図9】本発明の第3実施形態を補足説明する図である。
【図10】本発明の振動波形を説明する図である。
【図11】本発明の偏重心補正手順を説明する図である。
【図12】本発明のディスク回転時でのクランパに作用する力を説明する図である。
【符号の説明】
1 偏重心補正用クランパ
1a 回転面内方向に複数分割された鉄板
1b 弾性支持部材
1c クランパ内部摺動面
1d 鉄板1aが発生する磁力を受けるための部材
2 プランジャ
3 振動センサ
4a 偏重心補正回路
4b プランジャドライバ
4c 電磁石ドライバ
5 スピンドルモータ
5a、5b ターンテーブル
5c 回転面内方向に複数分割された磁石
5d 弾性支持部材
5e ターンテーブル筺体
5f 磁石固定用リブ
6 ディスク
7 ピックアップアクチュエータ
8 スピンドル構造体
9 スピンドル構造体支持脚
10 ベース構造体
11 クランパホルダ
12 スリップリング
12a ブラシ
13 磁気シールド板
14 電磁石
15 ディスク偏重心が大きい場合の振動波形
16 ディスク偏重心が小さい場合および偏重心補正後の振動波形
17 振動許容値
18 スピンドル構造体がディスクをローディングするための回転中心
19 偏重心補正用クランパの重心
20 スピンドルの回転中心
21 偏重心補正用クランパの回転中心
【0001】
【発明の属する技術分野】本発明は可換型媒体を用いる光ディスク装置に係り、特に、高速回転型CD−ROM装置またはDVD ROM/RAM装置に関する。
【0002】
【従来の技術】光ディスク装置は、スピンドルモータに直結したターンテーブル上にディスクをのせて、ターンテーブル内あるいはクランパ内に内蔵される永久磁石の磁気力でクランプし、回転させ、半導体レーザを用いたピックアップでデータの読みとりを行っている。光ディスク装置は、互換性のあるディスクを用いているため、そのディスクサイズおよび重量は規制されている。特に重量に関しては、14〜33gとかなり幅広く設定されている。
【0003】一方、光ディスク装置、特にCD−ROM装置は、データ転送速度を向上させる直接的な効果となっているディスク回転速度の向上が図られている。標準速度は200〜500回転(線速度一定のため)であるが、標準速度の12倍以上、すなわち6000rpm以上の回転数が実現されようとしている。従来の例としては、特開昭57−198584号公報、特開昭63−152056号公報、特開昭63−152057号公報、特開平3−46154号公報、特開昭3−237647号公報がある。
【0004】
【発明が解決しようとする課題】しかし、前述したように、ディスク重量の規格にかなり幅広く設定されているがゆえに、一般に配布されているディスクは、それ自体が持つ偏重心はかなり大きい。たとえば偏重心のないディスクに、ユーザが任意の情報を認識するためにラベルを貼付すると、それだけで数g・mmの偏重心が発生する。偏重心の最悪値は経験的に10g・mmで、このようなディスクを回転させると、当然ながら偏重心による振動が発生する。
【0005】8倍速程度なら最大回転数は約4000rpmなので、偏重心による振動はアクチュエータあるいはシャシに対して小さいものであり、さほど問題とはならない。しかし、それ以上の高速回転になると、ディスクの持つ偏重心により振動は急激に増大し、アクチュエータの追従性能マージン低下のためのエラーレート増加、さらにシャシが振動し、それを搭載するコンピュータ本体が共鳴するといった現象が発生し、コンピュータユーザに不快感を与えることになる。
【0006】上記課題を解決するために、本発明者らは、ディスクをチャッキングする偏重心補正用クランパを移動して、回転中心と偏重心を一致させ、ディスク回転時の振動低減機構を提案した。10gr・mmの偏重心量を補正するためには、偏重心補正用クランパの偏心可能量が、数100μmであることを考慮すると、偏重心補正用クランパ重量は100gr必要である。しかし、6000rpm以上の高速回転となると、偏重心補正用クランパは、遠心力で偏重心補正位置に静止できず、ディスク上を移動してしまう問題がクローズアップされてくる。
【0007】図12は、ディスク、偏重心補正用クランパに作用する力を説明する図である。偏重心補正用クランパは回転中心からεずれ、ディスク偏重心をm・εで補正する。一方、偏重心補正用クランパをディスク上に静止させている力は、チャッキング力N1と偏重心補正用クランパ重量N2の和と、両者の間の最大静止摩擦係数の積であり、この力が偏重心補正用クランパにかかる遠心力F=mεω2(ω:回転数)に勝っている限り、偏重心補正用クランパは暴れることなくディスクの偏重心量を補正できることとなる。
【0008】偏重心補正用クランパをディスクに静止させることができる力は不変であるが、偏重心補正用クランパにかかる遠心力は、回転数の2乗に比例して増大することを考慮すると、N1+N2<mεω2/μ となったとき、偏重心補正用クランパはディスク上に静止不可能な状態となってしまう。たとえば、重量が30gの偏重心補正用クランパが、回転中心より200μmずれた状態で偏重心を補正できたとし、この状態でディスクが6000rpmで回転すると、遠心力は2.4Nとなる。
【0009】一方、チャッキング力が250g、偏重心補正用クランパとディスク間の摩擦係数を0.4とすると、偏重心補正用クランパをディスク上に静止させることができる力は1.1Nである。これらを比較すると、明らかに遠心力が偏重心補正用クランパを静止させることができる力を上回っている。このような状況では、偏重心補正用クランパは、ディスク上の補正位置から遠心力で動かされ、振動を大きくしてしまう。
【0010】チャッキング力を可変にする従来技術では、いずれもその機構は外部より力を加えるものであり、スピンドルモータのスラスト軸受けの予圧を変えることになり、その軸受けの寿命を著しく損なう恐れがある。以上のような状態を回避するためには、偏重心補正用クランパのディスクチャッキング力を増大させることが必須課題となる。
【0011】本発明の目的は、上記問題点を回避しつつ、偏重心を補正する機構に、偏重心補正用クランパのディスクチャッキング力を増大させる機構を付加し、信頼性を損なうことなく、ディスクの回転による振動を減少させながら、ディスクの高速回転化を実現し、データ転送速度が向上する光ディスク装置を提供することである。
【0012】
【課題を解決するための手段】本発明は、上記課題を以下のように解決した。すなわち、ディスクを支持するターンテーブルと、前記ディスクをターンテーブルに押し付けるクランパとを備え、前記ターンテーブルまたはクランパのいずれか一方に磁石を内蔵し、いずれか他方に鉄部材を内蔵する光ディスク装置において、前記磁石または鉄部材のうち、少なくともいずれか一方が、ディスク回転軸の半径方向に複数個に分割され、かつ、回転軸方向に弾性部材により移動可能に支持されるとともに、前記移動可能な磁石または鉄部材を内蔵するターンテーブルまたはクランパは、前記ディスク面に向かって拡径した形状であることを特徴とし、ディスク回転速度の増大時には、鉄部材と磁石が接近することによって、クランプ力を増大させるようにした。
【0013】以下、まず、本発明の構成を、図1を参照して具体的に説明する。スピンドル構造体8はディスク6を回転させるスピンドルモータ5とディスク6のデータを読み出すピックアップアクチュエータ7と一体構造となっており、外部に伝達される振動を絶縁するために、ベース構造体10とダンピングをもった支持脚9で支持されている。また支点18を中心にスピンドル構造体8は回転可能に支持されているのでターンテーブル5bは上下動することができる。この動きを用いてディスク6の装置内への出し入れを行い、さらに偏重心補正用クランパ1とターンテーブル5bとでディスク6をチャッキングする。スピンドル構造体8の面内あるいは面外方向にディスク6の持つ偏重心が発生する振動を測定するセンサ3が取りつけられている。この振動センサ3の取付位置はアクチュエータ2の移動方向と同方向が望ましい。振動センサ3の測定する物理量は変位、速度、加速度あるいは力のいずれかが選択される。補正機構系は偏重心補正用クランパ1と、それを移動させるアクチュエータ2と、振動センサ3で測定した信号を変換し、その値とあらかじめ設定されている基準値と比較しかつ制御を行う制御回路4aとで構成されている。
【0014】偏重心補正用クランパ5b内のターンテーブル5bに内蔵される磁石の磁気力を受ける鉄板1aは、回転軸断面において偏重心補正用クランパ筐体1とは弾性部材1bで結合され、回転面内方向において回転中心対称に複数分割されており、偏重心補正用クランパ内部1cの形状は円錐台形状とする。鉄板1aはディスク低速回転時すなわち補正時には、図2に示すように弾性部材1bによってターンテーブル5b内の磁石から遠ざかる位置にある。したがってチャッキング力は弱い状態にあるので、プランジャ2は容易に偏重心補正用クランパ1を打撃により移動させることができる。また、データ読み取り時にはディスク6は高速回転するので、鉄板1aは強い遠心力を受ける。偏重心補正用クランパ1と鉄板1aの摺動面1cの回転面内断面は磁石方向に面積が広がっているので、図3に示すように鉄板1aは磁石に近づく方向に移動する。磁力は距離の2乗に反比例するのでチャッキング力は強まり、偏重心補正用クランパ1はディスク7上を遠心力によって移動することはない。
【0015】偏重心補正用クランパ1はディスク6の偏重心を補正するために、移動可能距離と重量の積はディスク6の偏重心の最悪値と同等以上のアンバランス量となるように設定される。例えば、ディスク7の偏重心量が10gr・mm、偏重心補正用クランパ1の移動可能距離が300μmである場合は偏重心補正用クランパ重量は33gr以上あることが望ましい。偏重心補正用アクチュエータ2はプランジャ、ソレノイド等で構成されており、偏重心補正用クランパ1に撃力を与えることができる。
【0016】次に、本発明の解決手段を実際の装置の動作に従い、図1〜3、10、11を参照して説明する。光ディスク装置のディスクトレイに置かれたディスク6はユーザの指示により装置内にローディングされ、スピンドルモータ5と直結されているターンテーブル5b上に設置される。その後、ディスク6をターンテーブル5bと直結するためにディスク6を載せたスピンドル構造体8はクランパ1とターンテーブル5bでディスク6をターンテーブル5b内に内蔵された磁石の磁気力で挟み込みチャッキングする。次にディスク6はスピンドルモータ5により回転される。この時点でピックアップアクチュエータ7の状態はディスクデータ面に焦点を合わせておらず、稼働していない状態とする。このときディスク6が偏重心を持っていれば、回転することにより振動が発生するので、その振動をスピンドル構造体8内に内蔵する振動センサ3により測定する。
【0017】測定する振動は変位、速度、加速度あるいは力のいずれでもよい。例えば、変位振動を測定する場合には光プローブあるいは静電センサ等が使用される。速度信号を測定する場合にはソレノイドあるいはピックアップアクチュエータに内蔵されるピックアップ駆動コイル等が使用される。加速度信号を測定する場合には加速度ピックアップあるいは半導体プロセスにより形成された片持ち梁等が使用される。力信号を測定する場合にはロードセル等が使用される。測定した信号は偏重心補正回路4aに於いてあらかじめ設定されている振動の許容値と比較される。このとき、偏重心からの振動が許容値内の時は偏重心補正回路4aはアクチュエータドライバ4bには補正信号を出力せず直ちにスピンドルモータ5は高速回転を始め、データの転送を行う。
【0018】一方、振動測定時に許容値を越えたときには、偏重心補正回路4aは補正信号をアクチュエータドライバ4bに出力して偏重心補正用クランパ部1を偏重心補正用アクチュエータ2により回転中心からディスク6の持つ偏重心方向とは逆方向に移動させる。アクチュエータ2の動作タイミングはスピンドル5からの回転インデックスと測定した振動を比較し、かつアクチュエータ2が偏重心補正用クランパ1と接触するまでの時間を加味して決定される。このとき、一度の動作で偏重心が発生する振動が許容値内に収まらないときには複数回に分けて補正動作を行ってもよい。このようにして、偏重心が発生する振動が許容値に収まれば、スピンドルモータ5は高速回転を始め、データの転送を行う。
【0019】以上の補正により偏重心による振動が低減され高速回転時に耐えうるチャッキング力を得られるので、読みとり誤差を低減することができ、さらにコンピュータ内のほかの構成部品に悪影響を与えることなく、偏重心量の大きなディスクに対しても高速回転、すなわち高データ転送が可能でかつ高信頼性の光ディスク装置を構成することができる。
【0020】
【発明の実施の形態】以下、本発明の実施の形態を、図面を参照して説明する。図1〜3、10、11は、本発明の第1の実施形態を説明する図である。まず、本発明の構成を、図1〜3を用いて説明する。スピンドル構造体8はディスク6と、偏重心補正用クランパ1と、これを磁力によって吸引する磁石を内蔵したターンテーブル5bを持ち、ディスク6を自転駆動するスピンドルモータ5と、ディスク6のデータを読み出すピックアップアクチュエータ7からなり、外部振動を絶縁するために、ベース構造体10上にダンピングをもった支持脚9で支持されている。振動センサ3は、スピンドル構造体8に取り付けられ、ディスク6の持つ偏重心が発生する振動を測定する。この振動センサ3は、プランジャ2の移動方向と同方向に設置されるのが望ましいが、不可能なときはその限りではない。
【0021】補正機構の主な系は、ベース構造体10に固定されたクランパホルダ11に支持され、回転可能で、ターンテーブル5a内の磁石の磁力を受ける鉄板1aを内蔵した偏重心補正用クランパ1と、それを撃力を用いて移動させるプランジャ2と、振動センサ1で測定した信号を比較判断する回路4a、およびプランジャ2を動作させるドライバ4bとで構成されている。偏重心補正用クランパ5b内のターンテーブル5bに内蔵される磁石の磁気力を受ける鉄板1aは、回転軸断面において偏重心補正用クランパ筐体1とは弾性部材1bで結合され、回転面内方向において回転中心対称に複数分割されており、偏重心補正用クランパ1の内部の形状は円錐台形状とする。
【0022】鉄板1aはディスク低速回転時、すなわち補正時には、図2に示すように弾性部材4bによって、ターンテーブル5b内の磁石から遠ざかる位置にある。したがって、チャッキング力は弱い状態にあるので、プランジャ2は、容易に偏重心補正用クランパ1を打撃により移動させることができる。また、データ読み取り時にはディスク6は高速回転するので、鉄板1aは強い遠心力を受ける。偏重心補正用クランパ1と鉄板1aの摺動面1cの回転面内断面は、磁石方向に面積が広がっているので、図3に示すように、鉄板1aは磁石に近づく方向に移動する。したがって、チャッキング力は強まるので、偏重心補正用クランパ1は、ディスク6上を遠心力によって移動することはない。
【0023】以下に、本実施形態の補正動作を、図1、10、11を用いて説明する。光ディスク装置にディスク6をローディングした後、ディスク6は偏重心補正用クランパ1によってチャッキングされる。その後、ディスク6を回転させ、ディスク6の偏重心による振動を振動センサ3で測定する。なお、このときの回転数は、偏重心補正用アクチュエータ2の時定数の大きさで決定し、低速回転とする。このことで、チャッキング力は補正に適した力となる。偏重心補正回路4aは測定した値とあらかじめ設定されている基準値17と比較する。このときに、図10のように、振動レベルが基準値17以下の波形16であれば、即ディスク回転数を高速化してデータを読み出す。このときは、既に偏重心補正用クランパ1内の鉄板1aは、磁石に近づいているので、高速回転に適したチャッキング力となっている。基準値17は、少なくともディスク高速回転時にデータをピックアップアクチュエータ7が十分読み出しできる振動レベルである。
【0024】一方、図10の振動レベルが基準値を満たさない波形15の場合、偏重心補正回路4aは、アクチュエータドライバ4bに動作命令を出力して、偏重心補正用アクチュエータ2を動作させ、偏重心補正用クランパ1を測定した振動方向とは逆方向に移動させる。その後、再度振動の測定を行い、偏重心補正回路4aで基準値17以下であることを確認した後、ディスク回転数を高速化して、データを読み出す。偏重心補正ルーチンは複数回に分けて実行してもよい。
【0025】以上の機構は簡便な構造で、偏重心補正用クランパを回転遠心力で移動させることはないので、高回転時に安定してディスク偏重心を補正できる。したがって、データ転送速度を向上することができると同時に、信頼性の高い偏重心補正機構とそれを備えた光ディスク装置を得ることができる。
【0026】図4〜7、10、11は、本発明の第2の実施形態を説明する図である。まず、本実施形態の構成を、図4〜7を用いて説明する。スピンドル構造体8は移動可能な磁石5cを内蔵したターンテーブル5eと、偏重心補正用クランパ1と、磁石5cの磁力を用いてディスク6をクランプし回転させるスピンドルモータ5と、ディスク6のデータを読み出すピックアップアクチュエータ7とよりなり、外部振動を絶縁するために、ベース構造体10上にダンピングをもった支持脚9で支持されている。振動センサ3はスピンドル構造体8に取り付けられ、ディスク6の持つ偏重心が発生する振動を測定する。この振動センサ3はアクチュエータ2の移動方向と同方向に設置されるのが望ましいが、不可能なときはその限りではない。
【0027】補正機構の主な系は、ベース構造体10に固定されたクランパホルダ11に支持され、回転可能な偏重心補正用クランパ1と、それを撃力を用いて移動させるプランジャ2と、振動センサ3で測定した信号を比較判断する回路4a、およびプランジャ2を動作させるドライバ4bとで構成されている。ターンテーブル5e内に内蔵される磁気力を発生する磁石5cは、回転軸断面においてターンテーブル5e上部とは弾性部材5dで結合され、回転面内方向において回転中心対称に複数分割され、ターンテーブル5e内部形状は円錐台形状とし、リブ5fが設けられて、凹部に磁石5cが入っている。
【0028】磁石5cはディスク低速回転時、すなわち補正時には、図5に示すように、弾性部材5dによって偏重心補正用クランパ1内の鉄板から遠ざかる位置にある。したがって、チャッキング力は弱い状態にあるので、プランジャ2は、容易に偏重心補正用クランパ1を、打撃により移動させることができる。また、データ読み取り時には、ディスク6は高速回転するので、磁石5cは強い遠心力を受ける。ターンテーブル5eと磁石5cの摺動面の回転面内断面は、偏重心補正用クランパ1方向に面積が広がっているので、図7に示すように、磁石5cは鉄板に近づく方向に移動する。したがって、チャッキング力は強まるので、偏重心補正用クランパ1は、ディスク6上を遠心力によって移動することはない。
【0029】以下、本実施形態の補正動作を図4、10、11を用いて説明する。光ディスク装置にディスク6をローディングした後、ディスク6は偏重心補正用クランパ1によってチャッキングされる。その後、ディスク6を回転させディスク6の偏重心による振動を振動センサ3で測定する。なお、このときの回転数は偏重心補正用アクチュエータ2の時定数の大きさで決定し、低速回転とする。このことで、チャッキング力は補正に適した力となる。偏重心補正回路4aは、測定した値とあらかじめ設定されている基準値17と比較する。このときに、図10の振動レベルが基準値17以下の波形16であれば、即ディスク回転数を高速化してデータを読み出す。このときは、既にターンテーブル5e内の磁石5cは、偏重心補正用クランパ1の鉄板に近づいているので、高速回転に適したチャッキング力となっている。基準値17は、少なくともディスク高速回転時に、データをピックアップアクチュエータ7が十分読み出しできる振動レベルである。
【0030】一方、図10の振動レベルが基準値を満たさない波形15の場合、偏重心補正回路4aは、アクチュエータドライバ4bに動作命令を出力して、偏重心補正用アクチュエータ2を動作させ、偏重心補正用クランパ1を測定した振動方向とは逆方向に移動させる。その後、再度振動の測定を行い、偏重心補正回路4aで基準値17以下であることを確認した後、ディスク回転数を高速化してデータを読み出す。偏重心補正ルーチンは複数回に分けて実行してもよい。
【0031】以上の機構は、回転中心が決まっているターンテーブル内を、磁石が移動してチャッキング力を大きくするので、高速回転時のチャッキング力のバラツキを少なくできる。したがって、高回転時に安定してディスク偏重心を補正することができ、データ転送速度を向上することができると同時に、信頼性の高い偏重心補正機構と、それを備えた光ディスク装置を得ることができる。
【0032】図8〜11は、本発明の第3の実施形態を説明する図である。ひしまず、本発明の構成を、図8、9を用いて説明する。スピンドル構造体8はディスク6と、偏重心補正用クランパ1と、これを磁力によって吸引する電磁石14を内蔵したターンテーブル5aを持ち、ディスク6を自転駆動するスピンドルモータ5とディスク6のデータを読み出すピックアップアクチュエータ7とからなり、外部振動を絶縁するために、ベース構造体10上にダンピングをもった支持脚9で支持されている。振動センサ3はスピンドル構造体8に取り付けられ、ディスク6の持つ偏重心が発生する振動を測定する。この振動センサ3はアクチュエータ2の移動方向と同方向に設置されるのが望ましいが、不可能なときはその限りではない。
【0033】補正機構の主な系は、ベース構造体10に固定されたクランパホルダ11に支持され、回転可能な偏重心補正用クランパ1を、撃力を用いて移動させるプランジャ2と、モータ5への電磁石14の磁気漏洩を防ぐ磁気シールド板13と、ドライバ4cと電磁石14を電気的に接続し、電力を供給するためのブラシ12aおよびスリップリング12と、振動センサ3で測定した信号を比較判断して、制御を行う偏重心補正回路4aおよびプランジャ2を動作させるドライバ4bおよび電磁石14を駆動するドライバ4cとで構成されている。
【0034】電磁石14は磁力を用いて、偏重心補正用クランパ1をターンテーブル5a側に引き寄せ、ディスク6をチャッキングするものであり、偏重心補正時には、プランジャ2が偏重心補正用クランパ1を容易に移動させることができるように、チャッキング力を小さく、データ読み取り時には高速回転するので、偏重心補正用クランパ1が遠心力によってディスク6上を移動してしまわないように、チャッキング力を大きくする制御を行う。
【0035】以下、本実施形態の偏重心補正動作を図8R>8、10、11を用いて説明する。光ディスク装置にディスク6をローディングした後、ターンテーブル5a内に内蔵された電磁石14は、プランジャ2で偏重心補正用クランパ1を移動できる磁力をドライバ4cによって発生し、ディスク6をチャッキングする。その後、ディスク6を回転させ、ディスク6の偏重心による振動を振動センサ3で測定する。なお、このときの回転数は、偏重心補正用アクチュエータ2の時定数の大きさで決定される。偏重心補正回路4aは、測定した値とあらかじめ設定されている基準値17とを比較する。このときに、図10の振動レベルが基準値17以下の波形16であれば、即座に電磁石14は磁力を大きくして、チャッキング力を増し、ディスク回転数を高速化してデータを読み出す。基準値17は、少なくともディスク高速回転時に、データをピックアップアクチュエータ7が十分読み出しできる振動レベルである。
【0036】一方、図10の振動レベルが基準値を満たさない波形15の場合、偏重心補正回路4aはアクチュエータドライバ4bに動作命令を出力して、偏重心補正用アクチュエータ2を動作させ、偏重心補正用クランパ1を測定した振動方向とは逆方向に移動させる。その後、再度振動の測定を行い、偏重心補正回路4aで基準値17以下であることを確認した後、電磁石14は磁力を大きくしてチャッキング力を増し、ディスク回転数を高速化してデータを読み出す。偏重心補正ルーチンは複数回に分けて実行してもよい。
【0037】以上の機構で、偏重心補正用クランパはディスク上を遠心力で移動することはなく、チャッキング力制御機構がターンテーブル内にあるので、高回転時に安定してディスク偏重心を補正することができ、データ転送速度を向上することができると同時に、信頼性が高く、コンパクトな偏重心補正機構と、それを備えた光ディスク装置を得ることができる。
【0038】
【発明の効果】上述のとおり本発明によれば、ディスクチャッキング力を制御できる機能を付加し、ディスクの偏重心を補正する機構を、光ディスク装置に搭載することにより、安定に偏重心補正を行うことができ、高速回転が可能となる。これにより、データの高速転送化および偏重心補正効果の信頼性向上を実現できる。また、高速あるいは高密度光ディスク装置を提供できる。
【図面の簡単な説明】
【図1】本発明の第1実施形態を説明する図である。
【図2】本発明の第1実施形態において、ディスク低速回転時の動作を説明する図である。
【図3】本発明の第1実施形態において、ディスク高速回転時の動作を説明する図である。
【図4】本発明の第2実施形態を説明する図である。
【図5】本発明の第2実施形態において、ディスク低速回転時の動作を説明する図である。
【図6】本発明の第2実施形態の回転面内断面を説明する図である。
【図7】本発明の第2実施形態において、ディスク高速回転時の動作を説明する図である。
【図8】本発明の第3実施形態の構成を説明する図である。
【図9】本発明の第3実施形態を補足説明する図である。
【図10】本発明の振動波形を説明する図である。
【図11】本発明の偏重心補正手順を説明する図である。
【図12】本発明のディスク回転時でのクランパに作用する力を説明する図である。
【符号の説明】
1 偏重心補正用クランパ
1a 回転面内方向に複数分割された鉄板
1b 弾性支持部材
1c クランパ内部摺動面
1d 鉄板1aが発生する磁力を受けるための部材
2 プランジャ
3 振動センサ
4a 偏重心補正回路
4b プランジャドライバ
4c 電磁石ドライバ
5 スピンドルモータ
5a、5b ターンテーブル
5c 回転面内方向に複数分割された磁石
5d 弾性支持部材
5e ターンテーブル筺体
5f 磁石固定用リブ
6 ディスク
7 ピックアップアクチュエータ
8 スピンドル構造体
9 スピンドル構造体支持脚
10 ベース構造体
11 クランパホルダ
12 スリップリング
12a ブラシ
13 磁気シールド板
14 電磁石
15 ディスク偏重心が大きい場合の振動波形
16 ディスク偏重心が小さい場合および偏重心補正後の振動波形
17 振動許容値
18 スピンドル構造体がディスクをローディングするための回転中心
19 偏重心補正用クランパの重心
20 スピンドルの回転中心
21 偏重心補正用クランパの回転中心
【特許請求の範囲】
【請求項1】 ディスクを支持するターンテーブルと、前記ディスクをターンテーブルに押し付けるクランパとを備え、前記ターンテーブルまたはクランパのいずれか一方に磁石を内蔵し、いずれか他方に鉄部材を内蔵する光ディスク装置において、前記磁石または鉄部材のうち、少なくともいずれか一方が、ディスク回転軸の半径方向に複数個に分割され、かつ、回転軸方向に弾性部材により移動可能に支持されるとともに、前記移動可能な磁石または鉄部材を内蔵するターンテーブルまたはクランパは、前記ディスク面に向かって拡径した形状であることを特徴とする光ディスク装置。
【請求項2】 ディスクを回転させるスピンドルモータと、前記スピンドルモータ上に固定され、前記ディスクを支持するターンテーブルと、それらとは別体にディスクをターンテーブルに押し付ける偏重心補正用クランパと、前記偏重心補正用クランパを回転面内方向に移動可能とするアクチュエータと、前記ディスク回転時の振動の計測手段と、前記振動に基づく制御量を、前記アクチュエータを介して前記偏重心補正用クランパの押し付け手段に出力する制御回路とから構成される偏重心補正手段を備えた光ディスク装置において、前記偏重心補正手段は、前記ターンテーブルに内蔵される磁石の磁気力を受ける偏重心補正用クランパ内の鉄板が、回転軸を中心とした半径方向に2個以上に分割され、かつ回転軸方向に偏重心補正用クランパの筐体と弾性部材で結合され、前記偏重心補正用クランパの内部形状が、円錐台形状で面積の大きい面をディスク側にした構造であることを特徴とする光ディスク装置。
【請求項3】 ディスクを回転させるスピンドルモータと、前記スピンドルモータ上に固定され、前記ディスクを支持するターンテーブルと、それらとは別体にディスクをターンテーブルに押し付ける偏重心補正用クランパと、前記偏重心補正用クランパを回転面内方向に移動可能とするアクチュエータと、前記ディスク回転時の振動の計測手段と、前記振動に基づく制御量を、前記アクチュエータを介して前記偏重心補正用クランパの押し付け手段に出力する制御回路とから構成される偏重心補正手段を備えた光ディスク装置において、前記偏重心補正手段は、前記ターンテーブルに内蔵される磁石が、回転軸を中心とした半径方向に2個以上に分割され、かつ回転軸方向にターンテーブルの筐体と弾性部材で結合され、前記ターンテーブルの内部形状が、円錐台形状で面積の大きい面をディスク側にした構造であることを特徴とする光ディスク装置。
【請求項4】 ディスクを回転させるスピンドルモータと、前記スピンドルモータ上に固定され、前記ディスクを支持するターンテーブルと、それらとは別体にディスクをターンテーブルに押し付ける偏重心補正用クランパと、前記偏重心補正用クランパを回転面内方向に移動可能とするアクチュエータと、前記ディスク回転時の振動の計測手段と、前記振動に基づく制御量を、前記アクチュエータを介して前記偏重心補正用クランパの押し付け手段に出力する制御回路とから構成される偏重心補正手段を備えた光ディスク装置において、前記偏重心補正手段は、前記偏重心補正用クランパのクランプ力を可変にするクランプ力可変手段を、前記ターンテーブル内に有する構造であることを特徴とする光ディスク装置。
【請求項5】 請求項4に記載の光ディスク装置において、前記クランプ力可変手段は、偏重心補正時にディスククランプ力をデータ読み出し時より小さくすることを特徴とする光ディスク装置。
【請求項1】 ディスクを支持するターンテーブルと、前記ディスクをターンテーブルに押し付けるクランパとを備え、前記ターンテーブルまたはクランパのいずれか一方に磁石を内蔵し、いずれか他方に鉄部材を内蔵する光ディスク装置において、前記磁石または鉄部材のうち、少なくともいずれか一方が、ディスク回転軸の半径方向に複数個に分割され、かつ、回転軸方向に弾性部材により移動可能に支持されるとともに、前記移動可能な磁石または鉄部材を内蔵するターンテーブルまたはクランパは、前記ディスク面に向かって拡径した形状であることを特徴とする光ディスク装置。
【請求項2】 ディスクを回転させるスピンドルモータと、前記スピンドルモータ上に固定され、前記ディスクを支持するターンテーブルと、それらとは別体にディスクをターンテーブルに押し付ける偏重心補正用クランパと、前記偏重心補正用クランパを回転面内方向に移動可能とするアクチュエータと、前記ディスク回転時の振動の計測手段と、前記振動に基づく制御量を、前記アクチュエータを介して前記偏重心補正用クランパの押し付け手段に出力する制御回路とから構成される偏重心補正手段を備えた光ディスク装置において、前記偏重心補正手段は、前記ターンテーブルに内蔵される磁石の磁気力を受ける偏重心補正用クランパ内の鉄板が、回転軸を中心とした半径方向に2個以上に分割され、かつ回転軸方向に偏重心補正用クランパの筐体と弾性部材で結合され、前記偏重心補正用クランパの内部形状が、円錐台形状で面積の大きい面をディスク側にした構造であることを特徴とする光ディスク装置。
【請求項3】 ディスクを回転させるスピンドルモータと、前記スピンドルモータ上に固定され、前記ディスクを支持するターンテーブルと、それらとは別体にディスクをターンテーブルに押し付ける偏重心補正用クランパと、前記偏重心補正用クランパを回転面内方向に移動可能とするアクチュエータと、前記ディスク回転時の振動の計測手段と、前記振動に基づく制御量を、前記アクチュエータを介して前記偏重心補正用クランパの押し付け手段に出力する制御回路とから構成される偏重心補正手段を備えた光ディスク装置において、前記偏重心補正手段は、前記ターンテーブルに内蔵される磁石が、回転軸を中心とした半径方向に2個以上に分割され、かつ回転軸方向にターンテーブルの筐体と弾性部材で結合され、前記ターンテーブルの内部形状が、円錐台形状で面積の大きい面をディスク側にした構造であることを特徴とする光ディスク装置。
【請求項4】 ディスクを回転させるスピンドルモータと、前記スピンドルモータ上に固定され、前記ディスクを支持するターンテーブルと、それらとは別体にディスクをターンテーブルに押し付ける偏重心補正用クランパと、前記偏重心補正用クランパを回転面内方向に移動可能とするアクチュエータと、前記ディスク回転時の振動の計測手段と、前記振動に基づく制御量を、前記アクチュエータを介して前記偏重心補正用クランパの押し付け手段に出力する制御回路とから構成される偏重心補正手段を備えた光ディスク装置において、前記偏重心補正手段は、前記偏重心補正用クランパのクランプ力を可変にするクランプ力可変手段を、前記ターンテーブル内に有する構造であることを特徴とする光ディスク装置。
【請求項5】 請求項4に記載の光ディスク装置において、前記クランプ力可変手段は、偏重心補正時にディスククランプ力をデータ読み出し時より小さくすることを特徴とする光ディスク装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図9】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図9】
【図11】
【図12】
【公開番号】特開平11−66717
【公開日】平成11年(1999)3月9日
【国際特許分類】
【出願番号】特願平9−224569
【出願日】平成9年(1997)8月21日
【出願人】(000005108)株式会社日立製作所 (27,607)
【公開日】平成11年(1999)3月9日
【国際特許分類】
【出願日】平成9年(1997)8月21日
【出願人】(000005108)株式会社日立製作所 (27,607)
[ Back to top ]